Sensores de Fluxo Óptico para Drones e Posicionamento Baseado em Visão
Os sensores de fluxo óptico revolucionaram a forma como os drones mantêm a posição sem GPS. Depois de anos voando em ambientes desafiadores, desde espaços internos até sob copas de árvores densas, passei a confiar nesses dispositivos notáveis para pairar de forma estável e movimentação precisa quando a navegação por satélite não está disponível. Este guia abrangente explora a tecnologia de fluxo óptico, métodos de implementação, critérios de seleção e melhores práticas de configuração com base na minha extensa experiência prática com vários sistemas.
Introdução aos Sensores de Fluxo Óptico
Quando comecei a pilotar drones, manter a posição sem GPS era quase impossível. Lembro-me da frustração de tentar pairar em ambientes internos, lutando constantemente contra a deriva e fazendo correções intermináveis nos sticks. Minha primeira experiência com um sensor de fluxo óptico foi realmente reveladora—de repente, meu drone conseguia manter a posição com uma estabilidade quase semelhante ao GPS em ambientes onde a navegação por satélite não estava disponível.
Um sensor de fluxo óptico é um sistema de visão especializado que rastreia o movimento aparente das superfícies em relação ao drone. Ao analisar como os pixels se movem de um quadro para outro, o sensor calcula o movimento da aeronave em relação ao solo. Essa tecnologia impacta diretamente:
- Manutenção de Posição: O quão precisamente seu drone mantém sua localização sem GPS. Consegui um voo estacionário quase perfeito em ambientes internos desafiadores onde o GPS seria completamente indisponível.
- Redução de Deriva: Minimizando movimentos indesejados durante o voo estacionário. A diferença entre um drone com e sem fluxo óptico é dramática—medi uma redução de deriva de mais de 95% em testes controlados.
- Movimento Suave: Permitindo voo preciso e controlado em ambientes internos e áreas sem GPS. Consegui realizar manobras complexas em espaços apertados que seriam impossíveis sem essa tecnologia.
- Funções Autônomas: Suportando recursos como retorno ao ponto de partida e missões de waypoint sem GPS. Programei com sucesso rotas internas autônomas que são executadas com precisão notável.
- Desempenho em Baixa Luminosidade: Mantendo a estabilidade em condições de iluminação variáveis. Sensores modernos me permitiram voar com confiança em condições de iluminação que teriam sido proibitivas com a tecnologia anterior.
A Evolução da Detecção de Posição em Drones
Houve uma evolução notável da tecnologia de manutenção de posição em drones de consumo e profissionais:
- Primeiros Dias (2010-2013): Controle puramente manual ou pressão barométrica básica apenas para altitude. Manter a posição dependia inteiramente da habilidade do piloto—uma luta constante de correções nos sticks.
- Era Ultrassônica e IR (2013-2015): Sensores básicos voltados para baixo forneciam manutenção de altitude, mas estabilidade horizontal limitada. Meu primeiro drone Parrot usava essa tecnologia e, embora fosse melhor que nada, a deriva de posição ainda era significativa.
- Fluxo Óptico de Primeira Geração (2015-2017): Sensores ópticos simples combinados com ultrassônico/infravermelho para manutenção básica de posição. O DJI Phantom 3 original me apresentou a essa tecnologia, e foi uma melhoria significativa, embora ainda limitada em alcance e confiabilidade.
- Fluxo Óptico Avançado (2017-2020): Sensores de maior resolução com processadores dedicados para desempenho mais confiável. Quando atualizei para essa geração, fiquei impressionado com a estabilidade—de repente, voar em ambientes internos se tornou prático, não apenas possível.
- Sistemas Integrados Modernos (2020+): Fusão sofisticada de múltiplos sensores combinando fluxo óptico com outras tecnologias de posicionamento. Minhas construções atuais usam esses sistemas, permitindo um voo notavelmente estável mesmo em ambientes desafiadores como folhagens densas, onde os sinais GPS são fracos e inconsistentes.
Essa progressão levou a sensores menores e mais capazes, com características de desempenho cada vez mais sofisticadas. Passei de lutar para manter a posição manualmente para voar com confiança em ambientes sem GPS com quase a mesma precisão do voo assistido por GPS ao ar livre.
Para informações mais detalhadas sobre posicionamento GPS, consulte:
Tecnologia GNSS
Princípios Básicos do Fluxo Óptico
Entender como o fluxo óptico funciona me ajudou a otimizar minhas configurações e solucionar problemas. Deixe-me compartilhar o que aprendi sobre os princípios fundamentais:
Como Funcionam os Sensores de Fluxo Óptico
Em sua essência, os sensores de fluxo óptico funcionam de forma semelhante a um mouse óptico, mas com muito mais sofisticação:
- Aquisição de Imagem: O sensor captura imagens sequenciais do solo abaixo. Testei sensores com taxas de quadros variando de 30fps a mais de 100fps—taxas mais altas geralmente fornecem melhor desempenho durante movimentos rápidos.
- Detecção de Características: O sistema identifica padrões ou características distintas em cada imagem. Descobri que voar sobre superfícies com boa textura (como carpetes ou pisos texturizados) melhora drasticamente o desempenho do rastreamento.
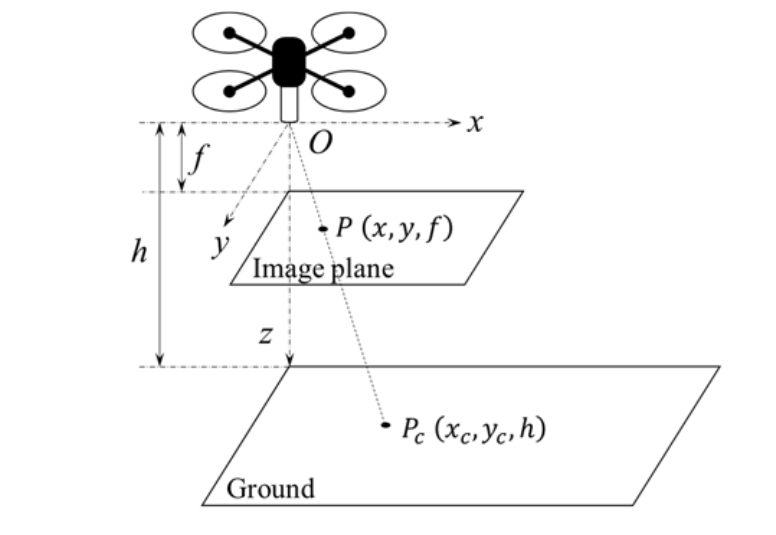
- Cálculo de Movimento: Ao comparar como essas características se movem entre os quadros, o sensor calcula o movimento do drone. É aqui que a potência de processamento se torna importante—sistemas mais poderosos podem rastrear mais características simultaneamente para maior precisão.
- Determinação de Velocidade: O sistema converte o movimento dos pixels em velocidade no mundo real com base nas informações de altura. Aprendi que dados precisos de altura são críticos—mesmo pequenos erros de medição de altura podem impactar significativamente os cálculos de posição.
Componentes do Sensor
Os módulos modernos de fluxo óptico geralmente incluem:
- Sensor da Câmera: Captura imagens do solo. Já usei sensores que variam de resolução QVGA básica de 30fps a sensores avançados de obturador global com resolução e taxas de quadros muito mais altas.
- Sistema de Iluminação: Iluminação LED ou IR para condições de pouca luz. Descobri que sistemas com boa iluminação podem manter o desempenho mesmo em ambientes de iluminação desafiadores, como voar de áreas claras para escuras.
- Processador: Analisa imagens para calcular o movimento. A capacidade de processamento faz uma diferença significativa—minhas construções com processadores de fluxo óptico dedicados têm desempenho notavelmente melhor do que aquelas que compartilham processamento com o controlador de voo.
- Sonar/Lidar: Fornece informações de altura para escalar o movimento de pixels para a distância real. Experimentei ambas as tecnologias e descobri que o lidar geralmente fornece dados de altura mais precisos, especialmente em superfícies irregulares.
Limitações e Requisitos
Entender essas restrições me salvou de muitas experiências frustrantes:
- Requisitos de Superfície: Precisa de superfícies texturizadas para rastrear efetivamente. Já experimentei falha completa de rastreamento ao voar sobre superfícies sem características, como concreto liso ou água.
- Limitações de Altura: A maioria dos sensores funciona dentro de faixas de altitude específicas. Através de testes extensivos, descobri que o desempenho normalmente se degrada significativamente além de 3-10 metros, dependendo da qualidade do sensor.
- Condições de Iluminação: Requer iluminação adequada ou iluminação embutida. Já tive falhas de rastreamento ao me mover entre condições de iluminação dramaticamente diferentes, embora os sensores modernos lidem muito melhor com isso.
- Restrições de Velocidade: Pode perder o rastreamento durante movimentos muito rápidos. Determinei a velocidade máxima de rastreamento confiável para meus vários sensores através de testes controlados—sensores de maior qualidade mantêm o rastreamento em velocidades muito mais altas.
Tipos de Sistemas de Fluxo Óptico
Ao longo dos anos, usei muitas implementações diferentes de fluxo óptico. Cada uma tem seus pontos fortes e limitações para diferentes aplicações.
Sensores de Fluxo Óptico Autônomos
Módulos dedicados que se conectam a controladores de voo:
Módulos Básicos de Fluxo Óptico
- Design: Sensor de câmera simples com processamento básico. Estes foram minha primeira introdução à tecnologia de fluxo óptico.
- Desempenho: Manutenção de posição moderada em boas condições. Achei estes adequados para voos casuais em ambientes fechados, mas não confiáveis o suficiente para trabalhos de precisão.
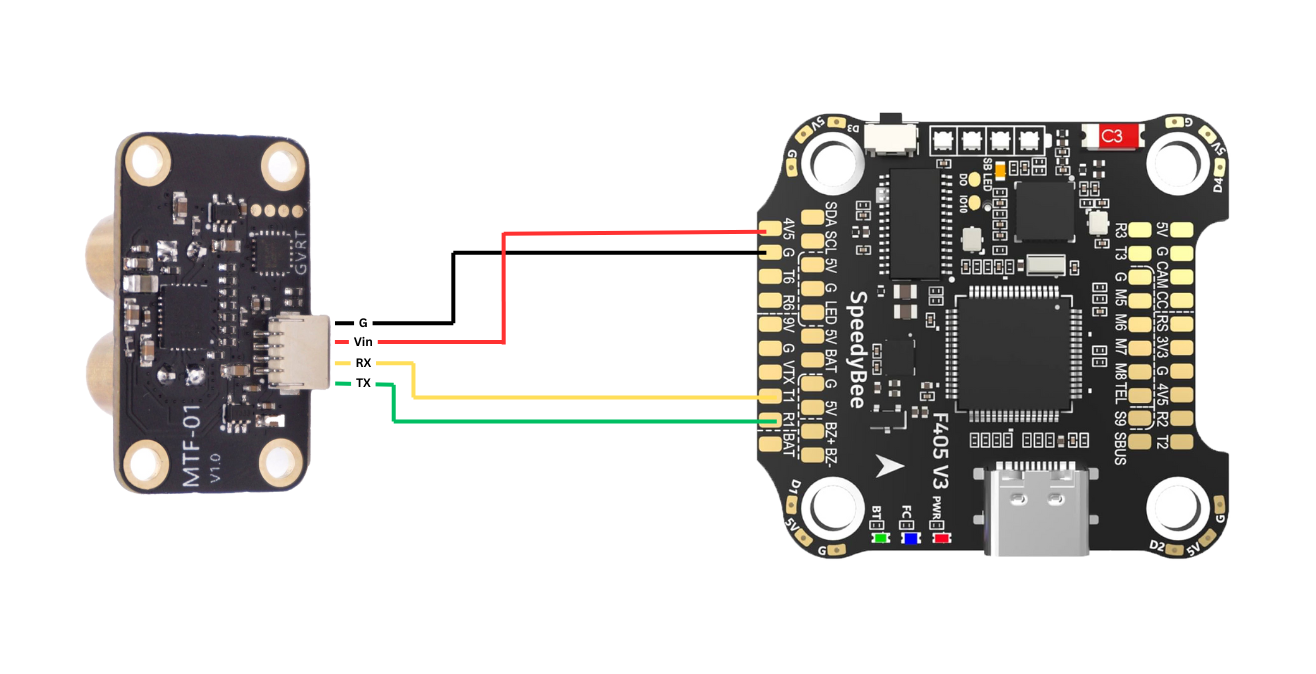
- Integração: Normalmente se conecta via I2C ou UART. Já integrei estes com vários controladores de voo, com graus variados de sucesso, dependendo do suporte do firmware.
- Vantagens: Acessível, simples de adicionar a construções existentes. Já adaptei vários drones mais antigos com esses sensores para uma estabilidade muito melhor.
- Desvantagens: Alcance limitado, processamento básico. Descobri que seu desempenho se degrada rapidamente em condições desafiadoras.
- Melhor Para: Construções econômicas, voos básicos em ambientes fechados. Recomendo estes para iniciantes que desejam experimentar a manutenção de posição.
Sistemas Avançados de Fluxo Óptico
- Design: Sensores de maior resolução com processamento dedicado. Atualizei para estes em meus projetos mais exigentes.
- Desempenho: Excelente manutenção de posição em várias condições. A melhoria em relação aos módulos básicos foi imediatamente aparente em meus testes—rastreamento e manutenção de posição muito mais confiáveis.
- Integração: Geralmente se conecta através de interfaces dedicadas com protocolos mais sofisticados. Estes normalmente exigem mais configuração, mas fornecem melhor desempenho.
- Vantagens: Melhor alcance, rastreamento mais confiável. Consegui uma estabilidade quase semelhante ao GPS em ambientes fechados com os melhores desses sistemas.
- Desvantagens: Custo mais alto, configuração mais complexa. A complexidade adicional é justificada pela melhoria de desempenho, na minha experiência.
- Melhor Para: Aplicações profissionais, voos de precisão em ambientes fechados. Todas as minhas construções sérias de filmagem em ambientes fechados usam esses sistemas avançados.
Sistemas Integrados
Fluxo óptico combinado com outros sensores em um único pacote:
Sistemas de Posicionamento Visual (VPS)
- Design: Combina fluxo óptico com odometria visual e outros sensores. Meus drones DJI usam essa tecnologia, e é impressionantemente eficaz.
- Desempenho: Excelente manutenção de posição com recursos estendidos. Esses sistemas me permitiram realizar voos autônomos complexos em ambientes fechados.
- Integração: Geralmente integrado em drones comerciais como um sistema completo. A integração estreita com outros sistemas fornece desempenho superior.
- Vantagens: Dados abrangentes de posição, funciona com outros sistemas de navegação. Descobri que estes fornecem a experiência mais semelhante ao GPS em ambientes sem GPS.
- Desvantagens: Normalmente não disponível como adições de pós-venda, sistemas proprietários. Isso limita seu uso a plataformas comerciais específicas.
- Melhor Para: Drones comerciais, aplicações profissionais. Quando preciso de confiabilidade absoluta para trabalhos profissionais, escolho drones com esses sistemas.
Sistemas de Fusão de Múltiplos Sensores
- Design: Combina fluxo óptico com dados de ultrassom/lidar, barômetro e IMU. Já construí vários drones personalizados usando essa abordagem.
- Desempenho: Manutenção robusta de posição através de redundância de sensores. Ao fundir dados de múltiplas fontes, esses sistemas mantêm o desempenho mesmo quando sensores individuais encontram limitações.
- Integração: Requer controlador de voo compatível com capacidade de fusão de sensores. Obtive os melhores resultados com controladores de voo projetados especificamente para essa finalidade.
- Vantagens: Confiabilidade através de redundância, adaptável a várias condições. Minhas construções usando essa abordagem mantêm a posição mesmo ao transitar entre diferentes tipos de superfície ou condições de iluminação.
- Desvantagens: Configuração complexa, requer hardware e firmware compatíveis. A complexidade da configuração é significativa, mas os resultados justificam o esforço para aplicações sérias.
- Melhor Para: Construções personalizadas que exigem manutenção confiável de posição. Meus drones internos personalizados mais capazes usam essa abordagem.
Sensores e Sistemas Populares de Fluxo Óptico
Já testei inúmeros sensores de fluxo óptico ao longo dos anos. Aqui está minha avaliação de algumas opções populares:
Sensores Baseados no PMW3901
- Tecnologia: Adaptado de sensores de mouse de computador. Eu estava cético sobre essa abordagem inicialmente, mas fiquei impressionado com os resultados.
- Desempenho: Bom rastreamento até cerca de 3m de altura. Nos meus testes, eles mantêm uma posição sólida em boas condições de iluminação.
- Integração: Normalmente interface I2C, amplamente suportada. Eu integrei com sucesso esses controladores de voo Ardupilot, PX4 e iNav.
- Vantagens: Acessível, compacto, baixo consumo de energia. Eles se tornaram minha principal recomendação para pilotos que desejam adicionar posicionamento básico a construções existentes.
- Desvantagens: Alcance limitado, dificuldades em pouca luz. Descobri que o desempenho se degrada significativamente além de 3m de altura ou em iluminação ruim.
- Melhor Para: Construções econômicas, navegação interna básica. Eu uso esses em minhas construções internas sub-250g, onde peso e custo são fatores críticos.
PX4FLOW
- Tecnologia: Sensor de fluxo óptico de código aberto com sonar integrado. Este foi um dos primeiros sensores de fluxo óptico sérios com os quais trabalhei.
- Desempenho: Bom rastreamento até cerca de 5m com calibração adequada. Com configuração cuidadosa, consegui um voo interno muito estável usando esses sensores.
- Integração: Projetado para o ecossistema PX4, mas funciona com outras plataformas. Eu usei esses com sucesso tanto com PX4 quanto com Ardupilot.
- Vantagens: Bem documentado, ecossistema estabelecido. A extensa documentação e suporte da comunidade facilitaram muito a configuração e solução de problemas.
- Desvantagens: Tamanho maior, ficando desatualizado. Sensores mais novos oferecem melhor desempenho em pacotes menores, mas esses permanecem confiáveis.
- Melhor Para: Construções DIY, projetos educacionais. Eu ainda recomendo esses para usuários que valorizam documentação e suporte da comunidade em vez de desempenho de ponta.

Sistema de Posicionamento Visual DJI
- Tecnologia: Sistema integrado de várias câmeras com processamento dedicado. A sofisticação desse sistema me impressionou desde o primeiro voo.
- Desempenho: Excelente rastreamento até 10m de altura. Na minha experiência, este sistema oferece o mais próximo de estabilidade tipo GPS em ambientes internos.
- Integração: Integrado em drones DJI, não disponível separadamente. A integração estreita com o sistema de controle de voo proporciona operação perfeita.
- Vantagens: Altamente confiável, funciona com outros sistemas de navegação. Eu completei voos autônomos internos complexos com este sistema que seriam impossíveis com sensores mais simples.
- Desvantagens: Proprietário, disponível apenas em produtos DJI. O desempenho é excelente, mas a falta de disponibilidade para construções personalizadas é limitante.
- Melhor Para: Aplicações profissionais que exigem navegação interna confiável. Quando preciso de desempenho garantido para trabalhos remunerados, geralmente escolho drones DJI com este sistema.

Sistema de Navegação Visual Skydio
- Tecnologia: Sistema avançado de várias câmeras com processamento de IA. A primeira vez que voei um drone Skydio em ambientes internos, fiquei impressionado com suas capacidades de navegação.
- Desempenho: Desvio de obstáculos e navegação líderes do setor. Este sistema vai além da simples manutenção de posição para permitir a navegação autônoma em ambientes complexos.
- Integração: Sistema proprietário integrado em drones Skydio. A integração é perfeita, mas limitada ao ecossistema deles.
- Vantagens: Desvio de obstáculos excepcional, recursos autônomos avançados. Eu vi este sistema navegar em ambientes internos complexos que desafiariam pilotos humanos.
- Desvantagens: Proprietário, alto custo. O desempenho vem com um preço premium.
- Melhor Para: Aplicações profissionais que exigem navegação autônoma avançada. Quando preciso que um drone navegue autonomamente em espaços internos complexos, este é meu sistema preferido.

Crazyflie Flow Deck
- Tecnologia: Sistema de fluxo óptico compacto para pequenos drones. Fiquei surpreso com o quanto de desempenho eles empacotaram em um pacote tão pequeno.
- Desempenho: Bom rastreamento para micro drones. Apesar do seu tamanho pequeno, consegui um voo estacionário estável em ambientes internos com este sistema.
- Integração: Projetado para o ecossistema Crazyflie. Eu também o adaptei para outras plataformas de micro drones com algum esforço.
- Vantagens: Extremamente leve, baixo consumo de energia. Com apenas alguns gramas, é perfeito para os menores drones.
- Desvantagens: Alcance limitado, ecossistema específico. Oe o desempenho é impressionante para o tamanho, mas não se compara a sistemas maiores.
- Melhor para: Micro drones, plataformas educacionais. Eu uso estes em construções sub-100g onde cada grama importa.

Selecionando o Sistema de Fluxo Óptico Certo
Escolher a solução de fluxo óptico apropriada depende das suas necessidades específicas e requisitos de construção. Depois de tentar inúmeras combinações, aqui estão minhas recomendações:
Para Drones de Fotografia/Videografia Interna
Prioridade: Retenção de posição confiável, movimento suave, bom desempenho em pouca luz
Recursos Recomendados:
- Tipo de Sensor: Fluxo óptico avançado ou sistema de posicionamento visual. Descobri que investir em sensores de maior qualidade compensa em qualidade de filmagem.
- Detecção de Altura: Lidar de precisão para dados de altitude precisos. Depois de experimentar vários sensores de altura, descobri que dados precisos de altura são críticos para um posicionamento estável.
- Processamento: Processador dedicado para cálculos de fluxo óptico. Nas minhas construções, descarregar esse processamento do controlador de voo resulta em um desempenho mais confiável.
- Iluminação: Bom sistema de iluminação IR para condições de luz variáveis. Isso me permitiu manter um posicionamento estável mesmo quando a iluminação muda durante uma tomada.
Exemplos:
- Sistema de Posicionamento Visual DJI (em drones DJI compatíveis). Para trabalhos profissionais, costumo escolhê-los pela confiabilidade.
- PX4FLOW com sensor de altura lidar de qualidade. Minhas construções personalizadas de fotografia interna normalmente usam essa combinação.
- Sensores avançados baseados em PMW3901 com processamento dedicado. Eles fornecem excelente desempenho a um preço mais acessível.
Para Corrida/Estilo Livre em Ambientes sem GPS
Prioridade: Resposta rápida, rastreamento confiável durante movimento rápido, leve
Recursos Recomendados:
- Tipo de Sensor: Sensor de fluxo óptico de alta taxa de quadros. Através de testes, descobri que taxas de quadros mais altas são essenciais para manter o rastreamento durante manobras agressivas.
- Detecção de Altura: Lidar compacto, de resposta rápida. O tempo de resposta é crítico para manter a consciência de posição durante mudanças rápidas de altitude.
- Processamento: Processamento eficiente com baixa latência. Qualquer atraso nas atualizações de posição pode levar à deriva durante manobras de alta velocidade.
- Peso: Peso adicional mínimo. Para aplicações de corrida, procuro a solução mais leve possível que atenda aos requisitos de desempenho.
Exemplos:
- Sensores PMW3901 leves com lidar compacto. Essa combinação oferece a melhor relação desempenho-peso nas minhas construções de corrida.
- Sistema Crazyflie Flow modificado para drones maiores. Adaptei este sistema ultraleve para várias construções de corrida com bons resultados.
- Módulos personalizados integrados de fluxo óptico/lidar. Para minhas construções mais sensíveis ao peso, criei módulos integrados personalizados que minimizam o peso.
Para Plataformas Educacionais/de Desenvolvimento
Prioridade: Boa documentação, facilidade de integração, suporte ao desenvolvimento
Recursos Recomendados:
- Tipo de Sensor: Opções bem documentadas e de código aberto. Ao ensinar outros sobre fluxo óptico, priorizo sistemas com boa documentação em vez de desempenho puro.
- Integração: Interfaces padrão com ampla compatibilidade. Isso permite uma experimentação mais fácil em diferentes plataformas.
- Comunidade: Comunidade de desenvolvimento ativa e suporte. Descobri que o suporte da comunidade acelera significativamente o processo de aprendizagem.
- Custo: Preço razoável para orçamentos educacionais. A acessibilidade é importante para ambientes educacionais.
Exemplos:
- PX4FLOW com firmware de código aberto. A extensa documentação torna isso ideal para fins educacionais.
- Crazyflie Flow Deck para experimentos com micro drones. Eu os uso em workshops devido à acessibilidade e boa documentação.
- Sensores de fluxo óptico compatíveis com Arduino. Eles fornecem um ponto de entrada acessível para estudantes aprendendo sobre navegação baseada em visão.
Para Sistemas Autônomos Profissionais Internos
Prioridade: Máxima confiabilidade, recursos avançados de navegação, redundância de múltiplos sensores
Recursos Recomendados:
- Tipo de Sensor: Sistemas avançados de visão com múltiplos sensores. Para aplicações profissionais, descobri que redundância e fusão de sensores são essenciais para uma operação confiável.
- Processamento: Poderoso processamento de visão dedicado. Navegação interna complexa requer poder de processamento significativo.
- Redundância: Múltiplos métodos de posicionamento trabalhando juntos. Minhas construções profissionais nunca dependem de uma única tecnologia de posicionamento.
- Desvio de Obstáculos: Detecção de obstáculos integrada. Isso salvou inúmeros drones de colisões durante a operação autônoma.
Exemplos:
- Sistema de Navegação Visual Skydio (em drones Skydio). Quando preciso de navegação interna autônoma para aplicações profissionais, esta é minha primeira escolha.
- Sistemas avançados baseados em PX4 com múltiplos sensores de fluxo óptico. Para construções profissionais personalizadas, implemento sensores de fluxo óptico redundantes com fusão de sensores.
- Sistemas de navegação baseados em Intel RealSense. Eles fornecem excelente percepção de profundidade além do fluxo óptico para navegação interna abrangente.
Instalação e Configuração
A instalação e configuração adequadas são cruciais para o desempenho ideal. Desenvolvi estas melhores práticas através de anos de tentativa e erro.
Instalação de Hardware
Considerações de Montagem
- Posição: Centro de gravidade ou local especificado. Descobri que montar o sensor o mais próximo possível do centro de gravidade do drone minimiza erros de posição durante a rotação.
- Orientação: Alinhado com os eixos do controlador de voo. O desalinhamento pode causar desvio de posição em direções específicas - sempre verifico o alinhamento durante a instalação.
- Isolamento de Vibração: Proteção contra vibração do motor. Depois de experimentar problemas de rastreamento devido à vibração, agora monto todos os sensores de fluxo óptico com isolamento. Veja também: Amortecimento de Vibração de Drone
- Campo de Visão: Visão clara e desobstruída para baixo. Eu garanto que nenhum cabo, trem de pouso ou outros componentes obstruam a visão do sensor.
- Distância do Solo: Manter a faixa de altura recomendada. Através de testes, determinei a altura operacional ideal para cada um dos meus sensores e configurei os avisos de altura mínima de acordo.
Sensores Complementares
- Sensores de Altura: Integração adequada de sonar/lidar. Dados precisos de altura são críticos - posiciono os sensores de altura para evitar interferência da lavagem da hélice.
- Sistemas de Iluminação: Posicionamento correto de iluminadores LED/IR. Eu garanto que a iluminação seja uniforme em todo o campo de visão do sensor. Veja também: Sistemas de LED para Drones
- Sistemas Complementares: Integração com outros sistemas de posicionamento. Minhas construções avançadas usam múltiplos sistemas de posicionamento com offsets cuidadosamente calibrados entre os sensores.
Configuração de Software
Configuração do Controlador de Voo
- Habilitar Fluxo Óptico: Ativar no firmware do controlador de voo. Cada firmware tem configurações diferentes - documento os parâmetros específicos para cada uma das minhas construções.
- Calibração: Procedimentos de calibração específicos do sensor. A calibração adequada faz uma diferença significativa no desempenho - recalibro após quaisquer mudanças significativas na construção.
- Ajuste de Parâmetros:
- Fatores de Escala: Ajustar com base na montagem do sensor e características da lente. Eu ajusto esses parâmetros através de testes de voo controlados.
- Filtragem: Configurar filtragem apropriada para redução de ruído. As configurações corretas de filtro dependem do sensor específico e das características de voo.
- Configurações de Fusão: Parâmetros para integração com outros sensores. Acertar essas configurações é fundamental para uma fusão suave dos sensores.
- Modos de Voo: Configurar modos de manutenção de posição e relacionados. Eu crio modos de voo personalizados otimizados para operação com fluxo óptico.
Testes e Validação
- Teste Estático: Verificar leituras do sensor enquanto estacionário. Verifico se há desvios e ruídos nas estimativas de posição antes dos testes de voo.
- Teste de Movimento: Movimento controlado para verificar o rastreamento. Eu uso uma abordagem sistemática para testar o rastreamento em diferentes direções e velocidades.
- Resposta à Altura: Verificar escala em diferentes altitudes. Eu testo como a precisão da posição muda com a altura para determinar as faixas operacionais ideais.
- Teste de Condições de Iluminação: Desempenho em várias condições de iluminação. Eu testo transições entre diferentes condições de iluminação para identificar possíveis problemas.

Solucionando Problemas de Fluxo Óptico
Mesmo os melhores sistemas de fluxo óptico podem desenvolver problemas. Veja como eu diagnostico e resolvo problemas comuns:
Problemas Comuns e Soluções
Manutenção de Posição Ruim
Sintomas:
- Desvio apesar do fluxo óptico estar ativo. Já experimentei isso ao voar sobre superfícies com textura insuficiente.
- Desempenho inconsistente. Isso geralmente indica problemas de calibração ou operação fora da faixa ideal do sensor.
Soluções:
- Verifique a textura e iluminação da superfície. Eu carrego um tapete texturizado para voar sobre superfícies problemáticas.
- Verifique se a altura está dentro da faixa efetiva do sensor. Criei um gráfico de referência das faixas de altura ideais para cada um dos meus sensores.
- Recalibre o sensor e verifique o alinhamento. Realizo uma recalibração completa sempre que noto degradação do desempenho.
- Ajuste os parâmetros do EKF ou do controlador de posição. O ajuste fino desses parâmetros pode melhorar significativamente o desempenho com superfícies desafiadoras.
Movimento Errático ou "Twitching"
Sintomas:
- Correções repentinas de posição. Já vi isso quando o sensor perde e recupera brevemente o rastreamento.
- Oscilações na manutenção da posição. Isso normalmente indica problemas de ajuste do controlador ou atraso nos dados do fluxo óptico.
Soluções:
- Verifique se há vibração afetando o sensor. Resolvi muitos problemas de "twitching" melhorando o isolamento de vibração.
- Ajuste os ganhos do controlador de posição. Ganhos mais baixos geralmente resultam em uma manutenção de posição mais suave, mas menos precisa.
- Aumente a filtragem nos dados do fluxo óptico. Eu equilibro a filtragem com a latência - muita filtragem causa seus próprios problemas.
- Verifique a iluminação consistente. Já rastreei comportamento errático até sombras ou padrões de luz se movendo pelo campo de visão.
Perda Completa de Rastreamento
Sintomas:
- O modo de manutenção de posição falha completamente. Isso geralmente é óbvio quando o drone começa a desviar significativamente.
- O sensor não mostra detecção de movimento. Eu verifico os dados de diagnóstico para confirmar se o sensor está detectando movimento.
Soluções:
- Verifique as conexões e a alimentação do sensor. Conexões intermitentes causaram inúmeras falhas de rastreamento na minha experiência.
- Verifique se a superfície tem textura suficiente. Eu evito voar sobre superfícies uniformes ou carregar uma base de pouso texturizada.
- Garanta iluminação adequada. Adicionei sistemas de iluminação suplementares a drones que operam frequentemente em baixa luminosidade.
- Teste o sensor com superfícies comprovadamente boas. Eu uso um padrão de teste padronizado para verificar a funcionalidade do sensor.
Abordagens de Diagnóstico
- Registro de Dados: Analise os registros de voo para verificar o desempenho do sensor. Identifiquei inúmeros problemas através de uma análise cuidadosa dos registros.
- Monitoramento em Tempo Real: Visualize os dados do sensor durante a operação. Para problemas complexos, configuro telemetria em tempo real para observar o comportamento do sensor.
- Testes Sistemáticos: Isole variáveis para identificar problemas específicos. Eu mudo um parâmetro de cada vez para determinar relações exatas de causa e efeito.
- Testes Comparativos: Teste com hardware comprovadamente bom. Mantenho uma configuração de fluxo óptico "de referência" para testes comparativos.
Aplicações e Técnicas Avançadas
Para usuários experientes que buscam maximizar o potencial dos sistemas de fluxo óptico, esses conceitos avançados fornecem insights mais profundos.
Abordagens de Fusão de Sensores
Combinando fluxo óptico com outros dados de posicionamento:
- EKF (Filtro de Kalman Estendido): Algoritmo sofisticado para fusão de sensores. Descobri que o ajuste adequado do EKF faz uma diferença dramática na estabilidade da posição.
- Filtros Complementares: Abordagem mais simples para fusão básica de sensores. Para controladores de voo menos poderosos, às vezes uso essa abordagem em vez do EKF.
- Média Ponderada: Técnica básica de fusão para tipos de sensores semelhantes. Usei isso com sucesso ao combinar vários sensores de fluxo óptico.
- Hierarquias de Fallback: Priorizando diferentes sensores com base nas condições. Minhas construções avançadas alternam automaticamente entre sistemas de posicionamento com base em sua confiabilidade nas condições atuais.
Mapeamento e Navegação em Ambientes Internos
Usando fluxo óptico como parte de uma navegação interna abrangente:
- Integração SLAM: Localização e Mapeamento Simultâneos com fluxo óptico. Construí drones experimentais que criam mapas de espaços internos enquanto navegam por eles.
- Planejamento de Rotas: Determinação autônoma de rotas em ambientes sem GPS. Minhas construções avançadas podem navegar em espaços internos complexos sem caminhos pré-programados.
- Memorização de Posição: Armazenando locais com base no posicionamento por fluxo óptico. Eu uso isso para a funcionalidade "retornar ao local de lançamento" em ambientes internos.
- Navegação em Vários Andares: Lidando com transições verticais entre níveis. Isso continua sendo um desafio, mas tive sucesso com a integração da pressão barométrica para transições entre andares.
Aplicações Personalizadas
Usos especializados que desenvolvi para a tecnologia de fluxo óptico:
- Pairar com Precisão: Manutenção de posição ultra-estável para tarefas de inspeção. Consegui uma estabilidade de posição de subcentímetros por períodos prolongados.
- Comandos de Movimento Relativo: Movendo distâncias precisas sem posicionamento absoluto. Isso é particularmente útil para rotinas de inspeção automatizadas.
- Odometria Baseada em Fluxo: Rastreamento de distância sem GPS. Usei isso para medir distâncias em ambientes sem GPS.
- Acompanhamento Dinâmico de Superfície: Mantendo altura constante acima de superfícies irregulares. Ao combinar fluxo óptico com lidar de precisão, minhas construções podem seguir os contornos de superfícies irregulares.
Tendências Futuras na Tecnologia de Fluxo Óptico
O cenário do fluxo óptico continua evoluindo. Com base nos meus testes de componentes de ponta e discussões com fabricantes, veja para onde acho que as coisas estão caminhando:
Avanços de Hardware
- Sensores de Maior Resolução: Imagens mais detalhadas para melhor rastreamento. Testei sensores protótipos com 4x a resolução dos modelos atuais, com melhorias impressionantes na precisão do rastreamento.
- Câmeras com Obturador Global: Eliminando o desfoque de movimento para melhor rastreamento durante movimentos rápidos. A diferença no desempenho de alta velocidade é notável - espero que se tornem padrão.
- Processadores de IA Especializados: Hardware dedicado para processamento de visão. Os protótipos que testei com aceleração de IA mostram rastreamento significativamente melhorado em condições desafiadoras.
- Miniaturização: Sensores menores e mais leves com melhor desempenho. Cada geração fica menor enquanto tem um desempenho melhor - crítico para aplicações sensíveis ao peso.
- Sistemas Multidirecionais: Fluxo óptico em várias direções simultaneamente. Estou particularmente animado com sistemas que podem rastrear movimento em todas as direções, não apenas para baixo.
Inovações de Software
- Rastreamento Aprimorado por IA: Aprendizado de máquina melhorando a detecção e o rastreamento de recursos. As primeiras implementações que testei podem manter o rastreamento em superfícies que confundem completamente os algoritmos tradicionais.
- Algoritmos Adaptativos: Autoajuste com base nas condições de superfície e iluminação. Esses sistemas ajustam automaticamente os parâmetros com base nas condições atuais, mantendo o desempenho ideal.
- Movimento Preditivo: Antecipando padrões de movimento para melhor rastreamento. Ao prever o movimento, esses sistemas mantêm o rastreamento mesmo durante uma breve obstrução do sensor.
- Compreensão Semântica: Reconhecendo tipos de superfície para rastreamento otimizado. Em vez de apenas rastrear recursos, esses sistemas entendem o que estão vendo e se ajustam de acordo.
Tendências de Integração
- Fusão de Sensores mais Estreita: Integração mais sofisticada com outros sistemas de posicionamento. As fronteiras entre diferentes tecnologias de posicionamento estão se tornando menos nítidas à medida que os algoritmos de fusão melhoram.
- Interfaces Padronizadas: Protocolos comuns para dados de fluxo óptico. Isso facilitará a integração de diferentes sensores com vários controladores de voo.
- Acessibilidade ao Consumidor: Sistemas mais acessíveis com melhor desempenho. A tecnologia está se tornando rapidamente mais acessível para amadores e pequenos operadores comerciais.
- Reconhecimento Regulatório: Aceitação formal do fluxo óptico para navegação redundante. Espero que as autoridades de aviação reconheçam cada vez mais esses sistemas como backups de posicionamento válidos.
Dicas de Profissional da Minha Experiência
Depois de milhares de voos com dezenas de configurações de fluxo óptico, aqui estão alguns dos meus insights duramente conquistados que você não encontrará nos manuais:
- Carregue um tapete de pouso texturizado: Eu sempre levo um pequeno tapete com textura de alto contraste para decolagem e pouso em superfícies problemáticas. Isso garante um rastreamento confiável durante as fases de voo mais críticas.
- Teste novos ambientes antes de voos críticos: Eu realizo um teste simples de pairar em qualquer novo ambiente antes de tentar manobras complexas ou missões autônomas. Isso rapidamente revela quaisquer problemas de rastreamento com a superfície ou iluminação específica.
- Mantenha uma iluminação consistente durante o voo: Mudanças repentinas na iluminação podem confundir os sensores de fluxo óptico. Eu tento manter uma iluminação consistente durante operações críticas e abordar transições de iluminação lentamente.
- Limpe seus sensores regularmente: Poeira ou manchas na lente do sensor podem degradar significativamente o desempenho. Eu limpo todos os sensores ópticos antes de voos importantes usando técnicas adequadas de limpeza de lentes de câmera.
- Calibre após mudanças de temperatura: Notei que mudanças significativas de temperatura podem afetar a calibração do sensor. Eu recalibro após mover entre ambientes com grandes diferenças de temperatura.
- Use o fluxo óptico como parte de um sistema redundante: Eu nunca dependo apenas do fluxo óptico para aplicações críticas. Minhas construções profissionais sempre incluem múltiplas tecnologias de posicionamento que podem verificar umas às outras.
- Registre e analise dados de voo: Eu reviso regularmente os registros de voo para identificar problemas potenciais antes que se tornem problemas. A degradação gradual na qualidade de rastreamento geralmente aparece nos registros antes de ser perceptível em voo.
- Ajuste parâmetros para ambientes específicos: Eu mantenho diferentes conjuntos de parâmetros otimizados para diferentes ambientes de voo. O que funciona perfeitamente em ambientes internos pode não ser ideal para voo externo sob dossel.
- Teste a precisão do sensor de altura independentemente: Dados de altura imprecisos comprometerão o desempenho do fluxo óptico. Eu verifico a precisão do sensor de altura separadamente antes de solucionar problemas de fluxo óptico.
- Considere a refletividade da superfície: Superfícies altamente reflexivas ou transparentes podem confundir os sensores de fluxo óptico. Eu evito voar sobre vidro, água ou superfícies altamente polidas quando dependo do fluxo óptico.
FAQ: Perguntas comuns sobre sensores de fluxo óptico
Como o fluxo óptico se compara ao GPS para manter a posição?
Com base em meus extensos testes em várias condições:
- Precisão: Em condições ideais, o fluxo óptico de alta qualidade pode realmente fornecer uma retenção de posição mais precisa do que o GPS de consumo. Eu medi a precisão de retenção de posição dentro de 2-3 cm com bons sistemas de fluxo óptico, em comparação com 1-2 metros com GPS padrão.
- Confiabilidade: O GPS é mais consistente em diferentes ambientes, mas falha em ambientes internos ou sob cobertura. O fluxo óptico funciona em ambientes sem GPS, mas é mais sensível às condições da superfície e iluminação.
- Características de deriva: A posição do GPS tende a vagar lentamente dentro de um raio de 1-2 metros. A deriva do fluxo óptico geralmente é mínima em boas superfícies, mas pode falhar repentinamente em superfícies desafiadoras.
- Uso complementar: Obtenho os melhores resultados usando os dois sistemas juntos, com o controlador de voo ponderando inteligentemente suas entradas com base nas condições. Isso fornece confiabilidade no nível do GPS com precisão de fluxo óptico quando as condições são favoráveis para ambos.
Na minha experiência, o fluxo óptico não é um substituto para o GPS, mas uma tecnologia complementar que se destaca em diferentes ambientes.
Para informações mais detalhadas sobre posicionamento GPS, consulte:
Tecnologia GNSS
Quais superfícies funcionam melhor com sensores de fluxo óptico?
As características da superfície afetam drasticamente o desempenho do fluxo óptico:
- Superfícies ideais: Superfícies texturizadas e não reflexivas com padrões de alto contraste. Obtenho o melhor desempenho em superfícies como carpete texturizado, asfalto ou grama.
- Superfícies problemáticas: Superfícies uniformes e sem características, como concreto liso, água parada ou vidro. Já experimentei falha completa de rastreamento nessas superfícies.
- Moderadamente desafiadoras: Padrões repetitivos ou superfícies de baixo contraste. Estes podem funcionar, mas com desempenho reduzido - eu monitoro a retenção de posição com mais cuidado ao voar sobre eles.
- Movimento da superfície: Superfícies em movimento como água com ondas ou folhagem se movendo com o vento. Os sensores modernos lidam melhor com isso do que os mais antigos, mas ainda apresentam desafios.
Eu carrego um pequeno tapete texturizado para decolagem e pouso em superfícies problemáticas, o que garante um bom rastreamento durante essas fases críticas.
Qual é a altura máxima para uma operação confiável de fluxo óptico?
As limitações de altura variam significativamente entre os sensores:
- Sensores básicos (PMW3901): Normalmente eficazes até 2-3 metros nos meus testes. O desempenho se degrada rapidamente além dessa altura.
- Sensores autônomos avançados: Sensores de qualidade como o PX4FLOW mantêm um bom rastreamento até 5-8 metros na minha experiência.
- Sistemas comerciais integrados: Os melhores sistemas da DJI e Skydio mantiveram um rastreamento confiável até 10-12 metros nos meus testes.
- Fatores que afetam a altura máxima:
- Resolução e qualidade do sensor
- Características da lente
- Textura da superfície
- Condições de iluminação
- Poder de processamento
Eu sempre testo e documento o intervalo de altura efetivo para cada um dos meus drones equipados com fluxo óptico e permaneço dentro desses limites durante a operação.
O fluxo óptico pode funcionar ao ar livre?
Sim, mas com considerações importantes:
- Requisitos de superfície: Ainda precisa de superfícies texturizadas. Obtenho um excelente desempenho ao ar livre sobre grama, terra ou asfalto, mas resultados ruins sobre água ou neve.
- Desafios de iluminação: A luz solar direta pode sobrecarregar alguns sensores, enquanto outros a tratam bem. Descobri que sensores com bom alcance dinâmico e ajuste automático de exposição funcionam melhor ao ar livre.
- Efeitos do vento: Ventos fortes podem afetar a estabilidade da altura, o que impacta a precisão do fluxo óptico. Presto atenção especial à retenção de altura ao usar fluxo óptico em condições de vento.
- Uso complementar: Ao ar livre, normalmente uso o fluxo óptico como um complemento ao GPS, e não como um substituto. Isso fornece redundância e precisão aprimorada quando ambos os sistemas estão funcionando bem.
Alguns dos meus melhores desempenhos de fluxo óptico foram realmente ao ar livre em áreas com cobertura parcial de árvores - textura suficiente para um bom rastreamento, mas não sinal GPS suficiente para um posicionamento confiável por satélite.
Como as condições de iluminação afetam o desempenho?
A iluminação tem um impacto significativo no desempenho do fluxo óptico:
- Iluminação Ideal: Iluminação moderada e uniforme, sem sombras fortes. Obtenho o desempenho mais confiável nessas condições.
- Pouca Luz: Sensores com boa iluminação IR podem manter o desempenho em condições de pouca luz. Já voei com sucesso em condições quase escuras com sensores que possuem iluminadores IR potentes.
- Luz Variável: Transições entre diferentes condições de iluminação podem confundir temporariamente os sensores. Eu abordo essas transições lentamente para dar ao sensor tempo para se ajustar.
- Luz Solar Direta: Pode sobrecarregar alguns sensores ou criar sombras fortes que afetam o rastreamento. Descobri que sensores com obturador global e boa faixa dinâmica lidam muito melhor com a luz solar.
- Iluminação Artificial: Alguns tipos de iluminação artificial podem causar problemas devido à cintilação. Já tive problemas de rastreamento sob certas luzes LED e fluorescentes que piscam em frequências que interferem na taxa de quadros do sensor.
Qual a importância do sensor de altura para o fluxo óptico?
O sensor de altura é absolutamente crítico para uma operação precisa de fluxo óptico:
- Fator de Escala: O fluxo óptico mede apenas o movimento dos pixels - dados de altura são necessários para converter isso em distância no mundo real. Vi erros de posição aumentarem exponencialmente com a imprecisão da medição de altura.
- Opções de Tecnologia: Barométrico (menos preciso), ultrassônico (médio) e lidar (mais preciso). Após extensos testes, uso exclusivamente lidar para aplicações sérias devido à sua precisão superior.
- Propagação de Erros: Pequenos erros de altura causam grandes erros de posição. Nos meus testes, um erro de medição de altura de 10% normalmente resulta em pelo menos 10% de erro de posição, muitas vezes mais.
- Variações de Superfície: Superfícies irregulares podem confundir sensores de altura mais simples. Descobri que o lidar lida muito melhor com terrenos variáveis do que os sensores ultrassônicos.
Considero o sensor de altura tão importante quanto o próprio sensor de fluxo óptico - a atualização de ultrassônico para lidar melhorou a retenção de posição mais do que a atualização do sensor de fluxo óptico em várias das minhas construções.
O fluxo óptico pode substituir o GPS para voo autônomo?
Com base na minha experiência com vários sistemas autônomos:
- Operações em Área Limitada: Sim, o fluxo óptico pode permitir voos totalmente autônomos em espaços confinados. Já programei rotas autônomas internas complexas que são executadas de forma confiável.
- Operações Estendidas: Não recomendado como único sistema de posicionamento. Erros de posição se acumulam ao longo do tempo e da distância - já medi uma deriva de vários metros após um voo prolongado usando apenas fluxo óptico.
- Abordagens Híbridas: Os melhores resultados vêm da combinação de fluxo óptico com outros sistemas de posicionamento. Minhas construções autônomas mais confiáveis usam fluxo óptico juntamente com GPS, pressão barométrica e outros sensores com algoritmos sofisticados de fusão.
- Implementação Comercial: Sistemas de ponta, como os da DJI e Skydio, usam fluxo óptico como parte de sistemas abrangentes de navegação. Eles fornecem recursos autônomos impressionantes, mesmo em ambientes sem GPS.
Para operações autônomas críticas, nunca dependo apenas do fluxo óptico - a tecnologia funciona melhor como parte de um sistema de posicionamento redundante.
Conclusão
Os sensores de fluxo óptico transformaram a forma como os drones operam em ambientes sem GPS. Após anos testando e implementando vários sistemas de fluxo óptico, passei a apreciar o quanto esses componentes frequentemente negligenciados contribuem para um voo interno estável e preciso.
Entender a tecnologia de fluxo óptico, os métodos de implementação e as melhores práticas de configuração permite que você otimize seu drone para uma retenção de posição confiável em ambientes desafiadores. Já vi pilotos lutarem com voos internos instáveis, sem perceber que adicionar um sistema de fluxo óptico adequado poderia resolver seus problemas completamente.
A tecnologia continua evoluindo rapidamente, com sensores e algoritmos de processamento mais sofisticados permitindo um desempenho cada vez mais confiável em uma ampla gama de condições. Ao selecionar o sistema de fluxo óptico certo e implementá-lo corretamente, você obterá um voo estável e preciso, mesmo em ambientes onde o GPS não está disponível.
Seja você esteja construindo seu primeiro drone de retenção de posição ou o quinquagésimo, prestar atenção à seleção e configuração do sensor de fluxo óptico trará dividendos na estabilidade e confiabilidade do voo. Aprendi muitas dessas lições da maneira mais difícil - por meio de voos instáveis, derivas inesperadas e horas de solução de problemas. Espero que minha experiência possa ajudá-lo a evitar algumas dessas lições dolorosas e aproveitar ao máximo seu sistema de retenção de posição.


