ドローンの光流センサーとビジョンベースの位置決め
光学フローセンサーは、GPSなしでドローンが位置を維持する方法に革命をもたらしました。屋内空間から濃い木々の下まで、様々な困難な環境で何年も飛行した後、私はこれらの優れたデバイスに、衛星航法が利用できない場合の安定したホバリングと正確な動きを頼るようになりました。この包括的なガイドでは、私が様々なシステムで広範囲に実践した経験に基づいて、光学フロー技術、実装方法、選択基準、セットアップのベストプラクティスを探求します。
光学フローセンサーの紹介
私が初めてドローンを飛ばし始めたとき、GPSなしで位置を維持することはほぼ不可能でした。屋内でホバリングしようとして、ドリフトと戦い、無限にスティックを修正し続けるフラストレーションを覚えています。光学フローセンサーを初めて経験したとき、それは本当に目を見張るものでした。突然、私のドローンは、衛星航法が利用できない環境で、ほぼGPSのような安定性で位置を維持できるようになったのです。
光学フローセンサーは、ドローンに対する表面の見かけの動きを追跡する特殊なビジョンシステムです。フレーム間でピクセルがどのように動くかを分析することで、センサーは地面に対する機体の動きを計算します。このテクノロジーは以下に直接影響します:
- 位置保持: GPSなしでドローンがどれだけ正確に位置を維持するか。GPSが完全に利用できない困難な屋内環境で、ほぼ完璧なホバリングを達成しました。
- ドリフト低減: ホバリング中の不要な動きを最小限に抑えること。光学フローの有無によるドローンの違いは劇的で、制御されたテストでは95%以上のドリフト低減を測定しました。
- スムーズな動き: 屋内やGPSが使えない領域での正確で制御された飛行を可能にすること。このテクノロジーがなければ不可能な狭いスペースでの複雑な操作を行うことができました。
- 自律機能: GPSなしでリターントゥホームやウェイポイントミッションなどの機能をサポートすること。驚くべき精度で実行される屋内自律ルートのプログラミングに成功しました。
- 低照度性能: 様々な照明条件で安定性を維持すること。最新のセンサーにより、以前の技術では禁止的だった照明条件でも自信を持って飛行できるようになりました。
ドローン位置検知の進化
民生用および業務用ドローンの位置保持技術には目覚ましい進化がありました:
- 初期 (2010-2013): 完全に手動制御または高度のみの基本的な気圧。位置維持はパイロットのスキルに完全に依存しており、スティック修正の絶え間ない闘いでした。
- 超音波とIRの時代 (2013-2015): 基本的な下向きセンサーが高度保持を提供したが、水平安定性は限定的。私の最初のParrotドローンはこの技術を使用していましたが、何もないよりはましでしたが、位置ドリフトはまだ大きかったです。
- 第1世代の光学フロー (2015-2017): 超音波/赤外線と組み合わせたシンプルな光学センサーによる基本的な位置保持。オリジナルのDJI Phantom 3で私はこの技術に触れましたが、範囲と信頼性はまだ限られていました。
- 高度な光学フロー (2017-2020): より信頼性の高い性能のための専用プロセッサを備えた高解像度センサー。この世代にアップグレードしたとき、その安定性に驚きました。突然、屋内飛行は単に可能なだけでなく実用的になったのです。
- 最新の統合システム (2020+): 光学フローと他の位置決め技術を組み合わせた洗練されたマルチセンサーフュージョン。私の現在のビルドではこれらのシステムを使用しており、GPS信号が弱く不安定な濃い葉などの困難な環境でも非常に安定した飛行を可能にしています。
この進歩により、センサーはより小型化、高性能化し、ますます洗練された性能特性を備えるようになりました。私は手動で位置を維持するのに苦労していたのが、今ではGPSが使えない環境でも、屋外のGPS支援飛行とほぼ同じ精度で自信を持って飛行できるようになりました。
GPS測位の詳細については、以下を参照してください:
GNSS技術
光学フローの基本原理
光学フローがどのように機能するかを理解することで、セットアップを最適化し、問題のトラブルシューティングに役立ちました。私が学んだ基本原理を共有しましょう:
光学フローセンサーの仕組み
光学フローセンサーは、基本的には光学マウスと同様に機能しますが、はるかに高度です:
- 画像取得: センサーは下の地面の連続した画像をキャプチャします。私は30fpsから100fps以上のフレームレートのセンサーをテストしました。一般的に、高いレートは高速移動時のより良いパフォーマンスを提供します。
- 特徴検出: システムは各画像内の特徴的なパターンや特徴を識別します。良いテクスチャ(カーペットやテクスチャのある床など)の上を飛ぶと、追跡性能が大幅に向上することがわかりました。
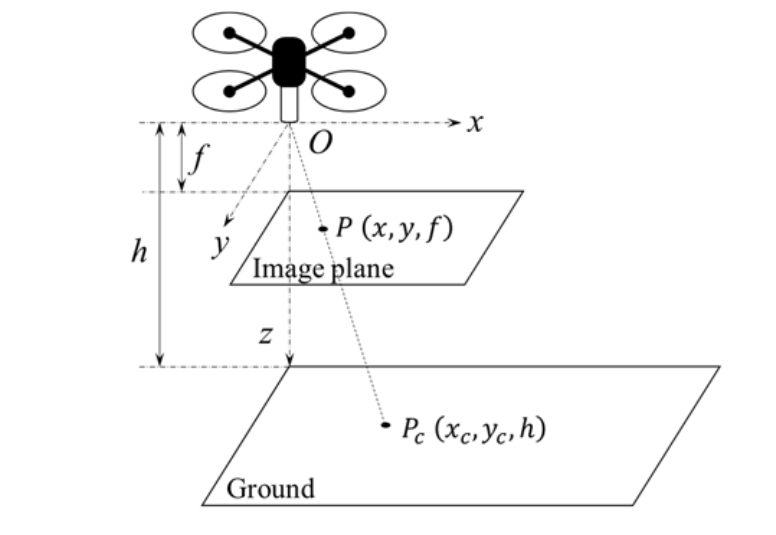
- 動き計算: これらの特徴がフレーム間でどのように動くかを比較することで、センサーはドローンの動きを計算します。ここで処理能力が重要になります。より強力なシステムは、より多くの特徴を同時に追跡して、精度を高めることができます。
- 速度決定: システムは高度情報に基づいてピクセルの動きを実世界の速度に変換します。高度データの精度が重要であることを学びました。わずかな高度測定誤差でも、位置計算に大きな影響を与える可能性があります。
センサーの構成要素
最新の光学フローモジュールには通常以下が含まれます:
- カメラセンサー: 地面の画像をキャプチャします。私は、基本的な30fpsのQVGA解像度のセンサーから、はるかに高い解像度とフレームレートを持つ高度なグローバルシャッターセンサーまで、さまざまなセンサーを使用してきました。
- 照明システム: 低照度条件用のLEDまたはIR照明。優れた照明システムを備えたシステムは、明るい場所から暗い場所へ飛行するなどの厳しい照明環境でもパフォーマンスを維持できることがわかりました。
- プロセッサー: 画像を分析して動きを計算します。処理能力は大きな違いをもたらします。専用の光流プロセッサーを搭載した私のビルドは、フライトコントローラーと処理を共有するものよりも著しく優れたパフォーマンスを発揮します。
- ソナー/ライダー: ピクセルの動きを実際の距離にスケーリングするための高さ情報を提供します。私は両方の技術を試してみましたが、特に凸凹した表面では、ライダーの方が一般的により正確な高さデータを提供することがわかりました。
制限事項と要件
これらの制約を理解することで、多くのフラストレーションを経験せずに済みました:
- 表面の要件: 効果的に追跡するにはテクスチャのある表面が必要です。滑らかなコンクリートや水などの特徴のない表面を飛行しているときに、完全な追跡の失敗を経験したことがあります。
- 高度制限: ほとんどのセンサーは特定の高度範囲内で動作します。広範なテストを通じて、センサーの品質に応じて、通常3〜10メートルを超えるとパフォーマンスが大幅に低下することがわかりました。
- 照明条件: 適切な照明または内蔵の照明が必要です。劇的に異なる照明条件の間を移動するときに追跡の失敗がありましたが、最新のセンサーはこれをはるかに良好に処理します。
- 速度制約: 非常に急速な動きの間に追跡を失う可能性があります。私は、制御されたテストを通じて、さまざまなセンサーの最大信頼性追跡速度を決定しました。高品質のセンサーは、はるかに高速で追跡を維持します。
光流システムの種類
長年にわたり、私はさまざまな光流の実装を使用してきました。それぞれに異なるアプリケーションに対する長所と短所があります。
スタンドアロンの光流センサー
フライトコントローラーに接続する専用モジュール:
基本的な光流モジュール
- 設計: 基本的な処理機能を備えたシンプルなカメラセンサー。これらは、光流技術への私の最初の紹介でした。
- パフォーマンス: 良好な条件下での適度な位置保持。私は、これらがカジュアルな屋内飛行には十分であると感じましたが、精密作業には十分に信頼できませんでした。
- 統合: 通常、I2CまたはUARTを介して接続します。私はこれらをさまざまなフライトコントローラーと統合してきましたが、ファームウェアのサポートに応じて成功の度合いは異なります。
- 利点: 手頃な価格で、既存のビルドに簡単に追加できます。私は、安定性を大幅に向上させるために、これらのセンサーを使用していくつかの古いドローンを改造しました。
- 欠点: 限られた範囲、基本的な処理。私の経験では、これらのパフォーマンスは困難な条件下で急速に低下します。
- 最適な用途: 予算の厳しいビルド、基本的な屋内飛行。私は、位置保持を試してみたい初心者にこれらをお勧めします。
高度な光流システム
- 設計: 専用の処理機能を備えた高解像度センサー。私は、より要求の厳しいプロジェクトのためにこれらにアップグレードしました。
- パフォーマンス: さまざまな条件下で優れた位置保持。私のテストでは、基本モジュールよりも改善点がすぐに明らかになりました。はるかに信頼性の高い追跡と位置保持が可能です。
- 統合: 通常、より洗練されたプロトコルを備えた専用インターフェイスを介して接続します。これらは通常、より多くの設定を必要としますが、より優れたパフォーマンスを提供します。
- 利点: より良い範囲、より信頼性の高い追跡。私は、これらのシステムの最高のものを使用して、屋内でGPSに近い安定性を実現しました。
- 欠点: コストが高く、設定が複雑です。私の経験では、追加の複雑さはパフォーマンスの向上によって正当化されます。
- 最適な用途: プロフェッショナルな用途、精密な屋内飛行。私の本格的な屋内撮影ビルドはすべて、これらの高度なシステムを使用しています。
統合システム
光流と他のセンサーを1つのパッケージに組み合わせたもの:
ビジョンポジショニングシステム(VPS)
- 設計: 光流とビジュアルオドメトリーおよびその他のセンサーを組み合わせます。私のDJIドローンはこの技術を使用しており、非常に効果的です。
- パフォーマンス: 優れた位置保持と拡張機能。これらのシステムにより、屋内で複雑な自律飛行を実行できるようになりました。
- 統合: 通常、完全なシステムとして商用ドローンに組み込まれています。他のシステムとの緊密な統合により、優れたパフォーマンスが提供されます。
- 利点: 包括的な位置データ、他のナビゲーションシステムと連携。私の経験では、これらはGPSが使用できない環境で最もGPSに近い体験を提供します。
- 欠点: 通常、アフターマーケットの追加として利用できない独自のシステム。これにより、その使用が特定の商用プラットフォームに限定されます。
- 最適な用途: 商用ドローン、プロフェッショナルな用途。プロの仕事で絶対的な信頼性が必要な場合、私はこれらのシステムを備えたドローンを選択します。
マルチセンサーフュージョンシステム
- 設計: 光流と超音波/ライダー、気圧計、IMUデータを組み合わせます。私はこのアプローチを使用していくつかのカスタムドローンを構築してきました。
- パフォーマンス: センサーの冗長性による堅牢な位置保持。複数のソースからのデータを融合することにより、これらのシステムは、個々のセンサーが制限に遭遇した場合でもパフォーマンスを維持します。
- 統合: センサーフュージョン機能を備えた互換性のあるフライトコントローラーが必要です。私は、この目的のために特別に設計されたフライトコントローラーで最良の結果を得ています。
- 利点: 冗長性による信頼性、さまざまな条件に適応可能。このアプローチを使用した私のビルドは、異なる表面タイプや照明条件の間を移動する場合でも位置を維持します。
- 欠点: 複雑なセットアップ、互換性のあるハードウェアとファームウェアが必要。セットアップの複雑さは重要ですが、本格的なアプリケーションでは結果が努力を正当化します。
- 最適な用途: 信頼性の高い位置保持を必要とするカスタムビルド。私の最も機能の高いカスタム屋内ドローンは、このアプローチを使用しています。
人気の光流センサーとシステム
私は長年にわたって数多くの光流センサーをテストしてきました。人気のあるオプションのいくつかについての私の評価は次のとおりです:
PMW3901 ベースのセンサー
- 技術: コンピューターマウスのセンサーから応用されました。当初はこのアプローチに懐疑的でしたが、結果には感銘を受けました。
- 性能: 高度約3mまでの良好な追跡。私のテストでは、これらは良好な照明条件下で安定した位置保持を維持します。
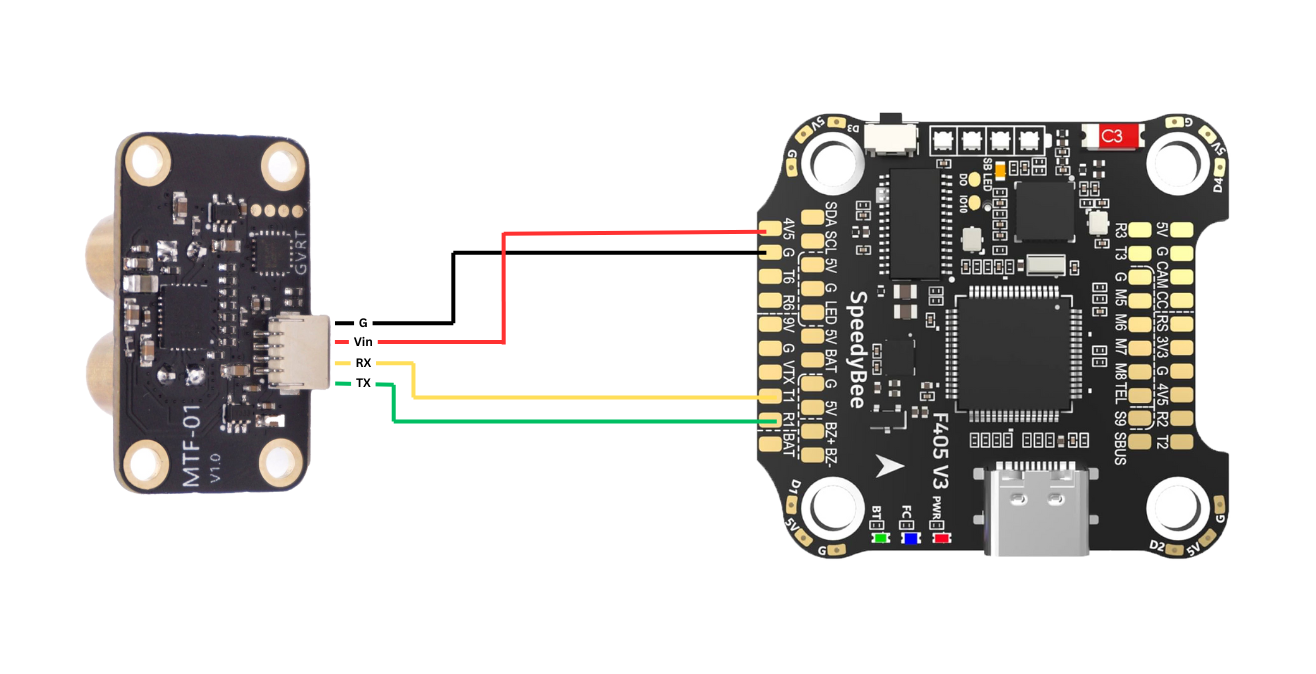
- 統合: 一般的にI2Cインターフェース、広くサポートされています。私はこれらをArdupilot、PX4、iNavフライトコントローラーと正常に統合しました。
- 利点: 手頃な価格、コンパクト、低消費電力。これらは、既存のビルドに基本的な位置保持を追加したいパイロットへの私のお勧めになりました。
- 欠点: 限定された範囲、低照度で苦戦。私の経験では、高度3mを超えるか、照明が悪いと性能が大幅に低下します。
- 最適な用途: 低予算のビルド、基本的な屋内ナビゲーション。私は重量とコストが重要な要因である250g未満の屋内ビルドでこれらを使用しています。
PX4FLOW
- 技術: 統合ソナーを備えたオープンソースの光流センサー。これは私が取り組んだ最初の本格的な光流センサーの1つでした。
- 性能: 適切なキャリブレーションで約5mまでの良好な追跡。慎重なセットアップにより、これらのセンサーを使用して非常に安定した屋内飛行を実現しました。
- 統合: PX4エコシステム用に設計されていますが、他のプラットフォームでも動作します。私はPX4とArduPilotの両方でこれらを正常に使用しました。
- 利点: 十分に文書化され、確立されたエコシステム。豊富なドキュメントとコミュニティサポートにより、セットアップとトラブルシューティングがはるかに容易になりました。
- 欠点: 大きなサイズ、古くなりつつあります。新しいセンサーはより小さなパッケージでより良い性能を提供しますが、これらは信頼できる働き者であり続けます。
- 最適な用途: DIYビルド、教育プロジェクト。最先端の性能よりもドキュメントとコミュニティのサポートを重視するユーザーにはこれらを推奨しています。

DJIビジョンポジショニングシステム
- 技術: 専用処理を備えた統合マルチカメラシステム。このシステムの洗練された技術は、最初のフライトから私に感銘を与えました。
- 性能: 高度10mまでの優れた追跡。私の経験では、このシステムは屋内でGPSに似た安定性に最も近いものを提供します。
- 統合: DJIドローンに組み込まれており、別途利用できません。フライト制御システムとの緊密な統合により、シームレスな操作が可能になります。
- 利点: 非常に信頼性が高く、他のナビゲーションシステムと連携します。私はこのシステムを使用して、単純なセンサーでは不可能な複雑な自律屋内飛行を完了しました。
- 欠点: 独自のもので、DJI製品でのみ利用可能。性能は優れていますが、カスタムビルドでの利用できないのが制限になります。
- 最適な用途: 信頼性の高い屋内ナビゲーションを必要とするプロフェッショナルな用途。有償の仕事で保証された性能が必要な場合、私はこのシステムを搭載したDJIドローンを選ぶことが多いです。

Skydioビジュアルナビゲーションシステム
- 技術: AI処理を備えた高度なマルチカメラシステム。Skydioドローンを初めて屋内で飛行させたとき、そのナビゲーション能力に驚きました。
- 性能: 業界最高の障害物回避とナビゲーション。このシステムは単純な位置保持を超えて、複雑な環境での自律ナビゲーションを可能にします。
- 統合: Skydioドローンに組み込まれた独自のシステム。統合はシームレスですが、そのエコシステムに限定されます。
- 利点: 優れた障害物回避、高度な自律機能。このシステムは、人間のパイロットにとって難しい複雑な屋内環境をナビゲートするのを見たことがあります。
- 欠点: 独自のもの、高コスト。その性能はプレミアム価格で提供されます。
- 最適な用途: 高度な自律ナビゲーションを必要とするプロフェッショナルな用途。ドローンに複雑な屋内空間を自律的にナビゲートさせる必要がある場合、これが私の定番システムです。

Crazyflie Flow Deck
- 技術: 小型ドローン用のコンパクトな光流システム。非常に小さなパッケージにこれほどの性能を詰め込んでいることに驚きました。
- 性能: マイクロドローンに適した良好な追跡。小型にもかかわらず、このシステムで安定した屋内ホバリングを実現しました。
- 統合: Crazyflieエコシステム用に設計されています。少し努力すれば、他のマイクロドローンプラットフォームにも適応できます。
- 利点: 非常に軽量、低消費電力。わずか数グラムなので、最小のドローンに最適です。
- 欠点: 限定された範囲、特定のエコシステム。Thサイズの割にはパフォーマンスは印象的ですが、大型システムには及びません。
- 最適な用途: マイクロドローン、教育用プラットフォーム。私は100g未満のビルドで、1gでも重要な場面でこれらを使用します。

適切なオプティカルフローシステムの選択
適切なオプティカルフローソリューションの選択は、特定のニーズとビルド要件に依存します。数え切れないほどの組み合わせを試した後、私の推奨事項は以下の通りです:
屋内撮影/ビデオ撮影ドローン用
優先事項: 信頼性の高い位置保持、スムーズな動き、低照度での良好なパフォーマンス
推奨される機能:
- センサータイプ: 高度なオプティカルフローまたはビジョンポジショニングシステム。高品質のセンサーへの投資は、映像の質に大きな影響を与えることがわかりました。
- 高度検知: 正確な高度データのための精密なライダー。様々な高度センサーを試した結果、安定した位置決めには正確な高度データが不可欠であることがわかりました。
- 処理: オプティカルフロー計算専用のプロセッサ。私のビルドでは、この処理をフライトコントローラから分離することで、より信頼性の高いパフォーマンスが得られています。
- 照明: 様々な照明条件に対応する優れたIR照明システム。これにより、ショット中に照明が変化しても安定した位置決めを維持できるようになりました。
例:
- DJIビジョンポジショニングシステム (対応するDJIドローンに搭載)。プロの仕事では、信頼性の高さからこれらを選ぶことが多いです。
- 高品質のライダー高度センサーを搭載したPX4FLOW。私のカスタム屋内撮影ビルドでは、通常このコンビネーションを使用しています。
- 専用処理を備えた高度なPMW3901ベースのセンサー。これらは、よりアクセスしやすい価格帯で優れたパフォーマンスを提供します。
GPSが使えない環境でのレーシング/フリースタイル用
優先事項: 高速応答、急激な動きでの信頼性の高い追跡、軽量
推奨される機能:
- センサータイプ: 高フレームレートのオプティカルフローセンサー。テストを通じて、アグレッシブな機動中の追跡を維持するには、より高いフレームレートが不可欠であることがわかりました。
- 高度検知: コンパクトで高速応答のライダー。急激な高度変化時の位置認識を維持するには、応答時間が重要です。
- 処理: 低レイテンシーで効率的な処理。位置更新の遅延は、高速機動中のドリフトにつながる可能性があります。
- 重量: 追加重量を最小限に抑えること。レーシング用途では、性能要件を満たす最軽量のソリューションを探しています。
例:
- コンパクトなライダーを搭載した軽量のPMW3901センサー。このコンビネーションは、私のレーシングビルドで最高のパフォーマンス対重量比を提供します。
- 大型ドローン用に改造したCrazyflie Flowシステム。この超軽量システムを、いくつかのレーシングビルドに適応させ、良好な結果を得ています。
- カスタム統合型オプティカルフロー/ライダーモジュール。最も重量を意識したビルドでは、重量を最小限に抑えるためにカスタム統合モジュールを作成しました。
教育/開発プラットフォーム用
優先事項: 優れたドキュメンテーション、統合の容易さ、開発サポート
推奨される機能:
- センサータイプ: ドキュメントが充実したオープンソースのオプション。オプティカルフローについて他の人に教える際は、生のパフォーマンスよりも優れたドキュメントを備えたシステムを優先します。
- 統合: 幅広い互換性を持つ標準インターフェース。これにより、異なるプラットフォーム間での実験がより容易になります。
- コミュニティ: 活発な開発コミュニティとサポート。コミュニティのサポートは学習プロセスを大幅に加速させることがわかりました。
- コスト: 教育予算に合った妥当な価格。教育環境ではアクセシビリティが重要です。
例:
- オープンソースファームウェアを搭載したPX4FLOW。豊富なドキュメントにより、教育目的に最適です。
- マイクロドローン実験用のCrazyflie Flow Deck。手頃な価格と優れたドキュメントのため、ワークショップで使用しています。
- Arduino互換のオプティカルフローセンサー。ビジョンベースのナビゲーションを学ぶ学生にとって、手頃な入門ポイントを提供します。
プロフェッショナルな屋内自律システム用
優先事項: 最大限の信頼性、高度なナビゲーション機能、マルチセンサー冗長性
推奨される機能:
- センサータイプ: 高度なマルチセンサービジョンシステム。プロの用途では、信頼性の高い動作のために冗長性とセンサーフュージョンが不可欠であることがわかりました。
- 処理: 強力な専用ビジョン処理。複雑な屋内ナビゲーションには、かなりの処理能力が必要です。
- 冗長性: 複数の位置決め方法の連携。私のプロ用ビルドでは、単一の位置決め技術に頼ることはありません。
- 障害物回避: 統合された障害物検知。これにより、自律動作中の無数のドローンの衝突を防ぐことができました。
例:
- Skydioビジュアルナビゲーションシステム (Skydioドローンに搭載)。プロの用途で屋内自律ナビゲーションが必要な場合、これが私の第一選択です。
- 複数のオプティカルフローセンサーを搭載した高度なPX4ベースのシステム。カスタムのプロ用ビルドでは、センサーフュージョンを備えた冗長オプティカルフローセンサーを実装しています。
- Intel RealSenseベースのナビゲーションシステム。これらは、オプティカルフローに加えて優れた深度知覚を提供し、包括的な屋内ナビゲーションを実現します。
インストールとセットアップ
適切なインストールと設定は、最適なパフォーマンスのために重要です。私は何年もの試行錯誤を通じて、これらのベストプラクティスを開発してきました。
ハードウェアのインストール
取り付けに関する考慮事項
- 位置: 重心または指定された位置。私の経験では、ドローンの重心にできるだけ近くセンサーを取り付けることで、回転中の位置誤差を最小限に抑えることができます。
- 向き: フライトコントローラーの軸に合わせる。ミスアライメントは、特定の方向への位置ドリフトを引き起こす可能性があります。インストール時には常にアライメントを再確認しています。
- 振動絶縁: モーターの振動から保護する。振動によるトラッキングの問題を経験した後、私は現在すべての光流センサーをソフトマウントしています。参照: ドローンの振動ダンピング
- 視野: 下方への明確で遮られない視界。ケーブル、ランディングギア、その他のコンポーネントがセンサーの視界を遮らないようにしています。
- 地上からの距離: 推奨される高さ範囲を維持する。テストを通じて、各センサーの最適な動作高度を決定し、それに応じて最小高度警告を設定しています。
コンパニオンセンサー
- 高度センサー: ソナー/ライダーの適切な統合。正確な高度データが重要です。プロペラの洗流の干渉を避けるために高度センサーを配置しています。
- 照明システム: LED/IR イルミネーターの正しい位置決め。センサーの視野全体で照明が均一になるようにしています。参照: ドローンの LED システム
- 補完システム: 他の測位システムとの統合。私の高度なビルドでは、慎重にキャリブレーションされたセンサー間のオフセットを使用して、複数の測位システムを使用しています。
ソフトウェアの設定
フライトコントローラーのセットアップ
- 光流を有効にする: フライトコントローラーのファームウェアでアクティブにする。ファームウェアごとに設定が異なります。私は自分のビルドごとに特定のパラメーターを文書化しています。
- キャリブレーション: センサー固有のキャリブレーション手順。適切なキャリブレーションはパフォーマンスに大きな違いをもたらします。ビルドに大きな変更があった後は再キャリブレーションを行います。
- パラメーターチューニング:
- スケールファクター: センサーの取り付けとレンズの特性に基づいて調整。制御された飛行テストを通じてこれらを微調整します。
- フィルタリング: ノイズ低減のための適切なフィルタリングを設定。適切なフィルター設定は、特定のセンサーと飛行特性に依存します。
- フュージョン設定: 他のセンサーと統合するためのパラメーター。これらの設定を正しく行うことは、スムーズなセンサーフュージョンにとって重要です。
- フライトモード: ポジションホールドおよび関連モードを設定する。私は光流動作用に最適化されたカスタムフライトモードを作成します。
テストと検証
- 静的テスト: 静止時のセンサー読み取り値を確認する。飛行テストの前に、位置推定のドリフトとノイズをチェックします。
- 動作テスト: トラッキングを検証するための制御された動き。異なる方向と速度でトラッキングをテストするために、体系的なアプローチを使用します。
- 高度応答: さまざまな高度でのスケーリングを検証する。高度によって位置精度がどのように変化するかをテストし、最適な動作範囲を決定します。
- 照明条件テスト: さまざまな照明での性能。潜在的な問題を特定するために、異なる照明条件間の遷移をテストします。

光流の問題のトラブルシューティング
最高の光流システムでも問題が発生する可能性があります。一般的な問題を診断し、対処する方法は次のとおりです:
一般的な問題と解決策
位置保持が不十分
症状:
- 光流がアクティブであるにもかかわらずドリフトする。テクスチャが不十分な表面を飛行するときにこれを経験しました。
- パフォーマンスが一貫していない。これは多くの場合、キャリブレーションの問題やセンサーの最適範囲外で動作していることを示しています。
解決策:
- 表面のテクスチャと照明を確認する。問題のある表面を飛行するためにテクスチャのあるマットを持ち歩いています。
- 高さがセンサーの有効範囲内にあることを確認する。私は、各センサーの最適な高さ範囲の参照チャートを作成しました。
- センサーを再キャリブレーションし、アライメントを確認する。パフォーマンスの低下に気づいたら、完全な再キャリブレーションを実行します。
- EKF または位置コントローラーのパラメーターを調整する。これらのパラメーターを微調整することで、難しい表面でのパフォーマンスを大幅に向上させることができます。
不規則な動きまたは「ひくつき」
症状:
- 突然の位置補正。センサーが一時的にトラッキングを失い、再び獲得したときにこれを見ました。
- 位置保持の振動。これは通常、コントローラーのチューニングの問題または光流データの遅延を示しています。
解決策:
- センサーに影響を与える振動を確認する。振動の絶縁を改善することで、多くの「ひくつき」の問題を解決しました。
- 位置コントローラーのゲインを調整する。ゲインを下げると、多くの場合、位置保持がスムーズになりますが、精度は低下します。
- 光流データのフィルタリングを増やす。私はフィルタリングと遅延のバランスを取ります。フィルタリングが多すぎると、それ自体の問題が発生します。
- 一貫した照明を確認する。視野を横切る影や光のパターンに不規則な動作の原因を突き止めました。
完全なトラッキングの喪失
症状:
- ホールドモードが完全に機能しない場合があります。これは通常、ドローンが大きく流れ始めると明らかです。
- センサーが動きを検出しない場合があります。診断データを確認して、センサーが動きを検出しているかどうかを確認します。
解決策:
- センサーの接続と電源を確認してください。私の経験では、間欠的な接続が原因で多数のトラッキングの失敗が発生しています。
- 表面に十分なテクスチャがあることを確認してください。均一な表面の上を飛行することは避け、テクスチャのある着陸パッドを携帯するようにしています。
- 適切な照明または照明を確保してください。低照度で頻繁に動作するドローンには、補助照明システムを追加しました。
- 既知の良好な表面でセンサーをテストします。センサーの機能を検証するために、標準化されたテストパターンを使用しています。
診断アプローチ
- データロギング: センサーのパフォーマンスについてフライトログを分析します。注意深いログ分析により、無数の問題を特定してきました。
- リアルタイムモニタリング: 動作中にセンサーデータを表示します。複雑な問題については、センサーの動作を観察するためにリアルタイムのテレメトリを設定します。
- 体系的なテスト: 変数を分離して特定の問題を特定します。原因と結果の関係を正確に判断するために、一度に1つのパラメーターを変更します。
- 比較テスト: 既知の良好なハードウェアでテストします。比較テスト用に「リファレンス」の光流セットアップを維持しています。
高度なアプリケーションとテクニック
光流システムの可能性を最大限に引き出したい経験豊富なユーザーのために、これらの高度な概念がより深い洞察を提供します。
センサーフュージョンアプローチ
光流を他の位置データと組み合わせる:
- EKF (拡張カルマンフィルター): センサーフュージョンのための洗練されたアルゴリズム。適切なEKFチューニングが位置の安定性に劇的な違いをもたらすことがわかりました。
- 相補フィルター: 基本的なセンサーフュージョンのためのよりシンプルなアプローチ。あまり強力でないフライトコントローラーの場合、EKFの代わりにこのアプローチを使用することがあります。
- 加重平均: 同様のセンサータイプを組み合わせるための基本的なフュージョンテクニック。複数の光流センサーを組み合わせる際に、これを使用して成功しました。
- フォールバック階層: 条件に基づいて異なるセンサーに優先順位を付けます。私の高度なビルドでは、現在の条件での信頼性に基づいて、位置決めシステム間を自動的に切り替えます。
屋内マッピングとナビゲーション
包括的な屋内ナビゲーションの一部として光流を使用する:
- SLAMインテグレーション: 光流を使用した同時位置推定とマッピング。ドローンが屋内空間のマップを作成しながら、その中を航行する実験的なドローンを構築しました。
- パスプランニング: GPSが使えない環境での自律的な経路決定。私の高度なビルドは、事前にプログラムされたパスなしで複雑な屋内空間をナビゲートできます。
- 位置記憶: 光流測位に基づく位置の保存。これを屋内での「離陸地点に戻る」機能に使用しています。
- 複数階ナビゲーション: レベル間の垂直移動の処理。これは依然として困難ですが、階移動のための気圧の統合で成功しました。
カスタムアプリケーション
光流技術のために開発した特殊な用途:
- 精密ホバリング: 検査タスクのための超安定位置保持。長時間にわたってセンチメートル以下の位置安定性を達成しました。
- 相対移動コマンド: 絶対位置決めなしで正確な距離を移動します。これは自動検査ルーチンに特に役立ちます。
- フローベースのオドメトリ: GPSなしでの距離追跡。GPSが使えない環境での距離測定に使用しました。
- 動的表面追従: 凹凸のある表面の上で一定の高さを維持します。光流と精密なライダーを組み合わせることで、私のビルドは凹凸のある表面の輪郭をたどることができます。
光流技術の将来動向
光流の状況は進化し続けています。最先端のコンポーネントのテストとメーカーとの議論に基づいて、私はこれからの方向性を次のように考えています:
ハードウェアの進歩
- 高解像度センサー: より詳細な画像処理によるより良い追跡。現在のモデルの4倍の解像度を持つ試作センサーをテストし、追跡精度の印象的な改善を確認しました。
- グローバルシャッターカメラ: 高速移動時のモーションブラーを排除し、より良い追跡を実現。高速性能の違いは著しく、これらが標準になると期待しています。
- 専用AIプロセッサー: ビジョン処理のための専用ハードウェア。AIアクセラレーションでテストしたプロトタイプは、困難な条件下で追跡性能が大幅に向上しています。
- 小型化: より小さく、より軽量で、より高性能なセンサー。各世代は小型化しながら性能が向上しており、重量に敏感なアプリケーションにとって重要です。
- 多方向システム: 複数の方向に同時に光流を発生させます。特に、下方だけでなくあらゆる方向の動きを追跡できるシステムに興奮しています。
ソフトウェアのイノベーション
- AI強化追跡: 機械学習による特徴検出と追跡の改善。テストした初期の実装は、従来のアルゴリズムでは完全に混乱する表面でも追跡を維持できます。
- 適応アルゴリズム: 表面と照明条件に基づく自己チューニング。これらのシステムは、現在の条件に基づいてパラメーターを自動的に調整し、最適なパフォーマンスを維持します。
- 予測的動作: より良い追跡のための動きパターンの予測。動きを予測することで、これらのシステムはセンサーが一時的に遮られている間も追跡を維持します。
- 意味的理解: 最適化された追跡のための表面タイプの認識。これらのシステムは、単に特徴を追跡するだけでなく、何を見ているかを理解し、それに応じて調整します。
統合の動向
- より緊密なセンサーフュージョン: 他の測位システムとのより洗練された統合。フュージョンアルゴリズムが改善されるにつれて、異なる測位技術間の境界があいまいになっています。
- 標準化されたインターフェース: 光流データの共通プロトコル。これにより、さまざまなフライトコントローラーとさまざまなセンサーを統合しやすくなります。
- 消費者のアクセシビリティ: より手頃な価格でより高性能なシステム。この技術は急速にホビイストや小規模な商用オペレーターにとってよりアクセスしやすいものになっています。
- 規制上の認識: 冗長なナビゲーションのための光流の正式な受け入れ。航空当局がこれらのシステムを有効な位置決めのバックアップとしてますます認識するようになると期待しています。
私の経験からのプロのヒント
何十もの光流構成で何千ものフライトを行った後、マニュアルには載っていない私の苦労して得た洞察の一部をここに紹介します:
- 着陸パッドを持ち歩く:問題のある表面での離着陸のために、コントラストの高いテクスチャのある小さなマットを常に持ち歩いています。これにより、最も重要なフライト段階で確実にトラッキングできます。
- 重要なフライト前に新しい環境をテストする:複雑な操作や自律ミッションを試みる前に、新しい環境で簡単なホバーテストを行います。これにより、特定の表面や照明に関するトラッキングの問題がすぐに明らかになります。
- フライト中は一貫した照明を維持する:突然の照明の変化は、オプティカルフローセンサーを混乱させる可能性があります。重要な操作中は一貫した照明を維持し、照明の変化にはゆっくりと対応するようにしています。
- センサーを定期的にクリーニングする:センサーレンズの埃や汚れは、性能を大幅に低下させる可能性があります。重要なフライト前には、適切なカメラレンズクリーニングの手法を使用して、すべての光学センサーをクリーニングします。
- 温度変化後にキャリブレーションを行う:大きな温度変化がセンサーのキャリブレーションに影響を与える可能性があることに気づきました。温度差の大きい環境間を移動した後は、再キャリブレーションを行います。
- オプティカルフローを冗長システムの一部として使用する:重要なアプリケーションでは、オプティカルフローのみに依存することは決してありません。私のプロフェッショナルなビルドでは、常に複数の位置決め技術を組み合わせて相互にチェックできるようにしています。
- フライトデータを記録・分析する:潜在的な問題が問題になる前に特定するために、フライトログを定期的に確認しています。トラッキング品質の徐々な低下は、多くの場合、フライト中に気づく前にログに現れます。
- 特定の環境に合わせてパラメータを調整する:さまざまなフライト環境に最適化された異なるパラメータセットを維持しています。屋内で完璧に機能するものが、屋外の林冠下のフライトに最適とは限りません。
- 高度センサーの精度を個別にテストする:高度データが不正確だと、オプティカルフローの性能が低下します。オプティカルフローの問題をトラブルシューティングする前に、高度センサーの精度を個別に検証します。
- 表面の反射率を考慮する:高反射または透明な表面は、オプティカルフローセンサーを混乱させる可能性があります。オプティカルフローに依存する場合、ガラス、水、または高度に磨かれた表面の上を飛行することは避けます。
FAQ:オプティカルフローセンサーに関するよくある質問
位置保持におけるオプティカルフローとGPSの比較
さまざまな条件下で広範囲にテストした結果、以下のようなことがわかりました。
- 精度:最適な条件下では、高品質のオプティカルフローは、民生用GPSよりも正確な位置保持を提供できます。標準的なGPSでは1〜2メートルの精度ですが、優れたオプティカルフローシステムでは2〜3cmの位置保持精度を測定しました。
- 信頼性:GPSは環境の違いに関係なく一貫した性能を発揮しますが、屋内やカバーの下では機能しません。オプティカルフローはGPSが使えない環境でも機能しますが、表面の状態や照明の影響を受けやすくなります。
- ドリフト特性:GPS位置は通常、半径1〜2メートル以内でゆっくりと変動します。オプティカルフローのドリフトは、良好な表面ではほとんど発生しませんが、難しい表面では突然完全に機能しなくなる可能性があります。
- 相補的な使用:両方のシステムを一緒に使用し、条件に基づいてフライトコントローラーがインテリジェントにそれらの入力を重み付けすることで、最良の結果が得られます。これにより、両方の条件に適した場合、GPSレベルの信頼性とオプティカルフローの精度が得られます。
私の経験では、オプティカルフローはGPSの代替ではなく、異なる環境で優れた性能を発揮する補完的な技術です。
GPS測位に関するより詳細な情報については、以下をご覧ください。
GNSS技術
オプティカルフローセンサーに最適な表面は?
表面の特性は、オプティカルフローの性能に大きな影響を与えます。
- 理想的な表面:テクスチャがあり、反射しない、コントラストの高いパターンの表面。テクスチャのあるカーペット、アスファルト、芝生などの表面で最高の性能が得られます。
- 問題のある表面:滑らかなコンクリート、静止した水、ガラスなどの均一で特徴のない表面。これらの表面ではトラッキングが完全に失敗する可能性があります。
- やや難しい表面:繰り返しパターンやコントラストの低い表面。これらは機能しますが、性能は低下します。これらの表面の上を飛行する際は、位置保持をより注意深く監視します。
- 表面の動き:波のある水や風で動く葉などの動く表面。最新のセンサーは古いセンサーよりもこれらをうまく処理しますが、それでも課題があります。
問題のある表面での離着陸時に、小さなテクスチャ付きのマットを持ち歩いています。これにより、これらの重要な段階で良好なトラッキングが保証されます。
オプティカルフローを確実に動作させるための最大高度は?
高度制限はセンサーによって大きく異なります。
- 基本的なセンサー(PMW3901):私のテストでは、通常2〜3メートルまで有効です。この高度を超えると性能が急速に低下します。
- 高度なスタンドアロンセンサー:PX4FLOWなどの高品質のセンサーは、私の経験では5〜8メートルまで良好なトラッキングを維持します。
- 統合型の商用システム:DJIやSkydioの最高のシステムは、私のテストでは10〜12メートルまで確実なトラッキングを維持しました。
- 最大高度に影響する要因:
- センサーの解像度と品質
- レンズの特性
- 表面のテクスチャ
- 照明条件
- 処理能力
私は常に、オプティカルフローを搭載したドローンごとに有効な高度範囲をテストし、文書化して、運用中はこれらの制限内にとどめるようにしています。
オプティカルフローは屋外で機能しますか?
はい。ただし、重要な考慮事項があります。
- 表面の要件:テクスチャのある表面が必要です。芝生、土、アスファルトの上では優れた屋外性能が得られますが、水や雪の上では性能が低下します。
- 照明の課題:直射日光は一部のセンサーを圧倒する可能性がありますが、他のセンサーはうまく処理します。ダイナミックレンジが広く、自動露出調整機能を備えたセンサーは、屋外でのパフォーマンスが優れていることがわかりました。
- 風の影響:強風は高度の安定性に影響を与え、オプティカルフローの精度に影響を与えます。風の強い条件でオプティカルフローを使用する場合は、高度保持に特に注意を払います。
- 相補的な使用:屋外では、通常、オプティカルフローをGPSの代替ではなく補完として使用します。これにより、両方のシステムが適切に機能している場合、冗長性と精度の向上が得られます。
実際、私が最高のオプティカルフローの性能を発揮したのは、部分的に木々に覆われた屋外エリアでした。良好なトラッキングに十分なテクスチャがありますが、信頼できる衛星測位用のGPS信号は不十分です。
照明条件はパフォーマンスにどのように影響しますか?
照明は、オプティカルフローの性能に大きな影響を与えます。
- 最適な照明:強い影のない、適度で均一な照明。このような条件下で最も信頼性の高いパフォーマンスを発揮します。
- 低照度:優れたIR照明を備えたセンサーは、低照度でもパフォーマンスを維持できます。強力なIRイルミネーターを備えたセンサーを使用して、ほぼ暗闇の状態で飛行に成功したことがあります。
- 照明の変化:異なる照明条件間の遷移は、一時的にセンサーを混乱させる可能性があります。センサーが調整する時間を与えるために、これらの遷移にはゆっくりと近づきます。
- 直射日光:一部のセンサーを圧倒したり、トラッキングに影響を与える強い影を作り出したりする可能性があります。グローバルシャッターと優れたダイナミックレンジを備えたセンサーは、日光をはるかに良好に処理することがわかりました。
- 人工照明:特定の種類の人工照明は、ちらつきが原因で問題を引き起こす可能性があります。センサーのフレームレートに干渉する周波数でちらつく特定のLEDや蛍光灯の下で、トラッキングの問題が発生したことがあります。
オプティカルフローにおける高度センサーの重要性
高度センサーは、正確なオプティカルフローの動作に絶対不可欠です:
- スケーリング係数:オプティカルフローはピクセルの動きしか測定しません。これを実世界の距離に変換するには、高度データが必要です。高度測定の不正確さに応じて、位置誤差が指数関数的に増加するのを見てきました。
- 技術オプション:気圧(最も精度が低い)、超音波(中程度)、ライダー(最も精度が高い)。広範なテストの結果、優れた精度のために重要なアプリケーションではライダーのみを使用しています。
- 誤差の伝播:わずかな高度誤差が大きな位置誤差を引き起こします。私のテストでは、10%の高度測定誤差は、通常、少なくとも10%の位置誤差をもたらし、多くの場合それ以上になります。
- 表面のばらつき:凹凸のある表面は、より単純な高度センサーを混乱させる可能性があります。ライダーは超音波センサーよりも変化する地形をはるかに良好に処理することがわかりました。
高度センサーはオプティカルフローセンサー自体と同じくらい重要だと考えています。超音波からライダーにアップグレードすることで、いくつかのビルドでオプティカルフローセンサーをアップグレードするよりも、位置保持が改善されました。
オプティカルフローは自律飛行のGPSに代わるものになりますか?
さまざまな自律システムでの私の経験に基づいて:
- 限定されたエリアでの運用:はい、オプティカルフローは限られたスペース内で完全な自律飛行を可能にします。信頼性の高い複雑な屋内自律ルートをプログラムしたことがあります。
- 長時間の運用:唯一の測位システムとしては推奨されません。位置誤差は時間と距離とともに蓄積されます。オプティカルフローのみを使用した長時間の飛行後、数メートルのドリフトを測定したことがあります。
- ハイブリッドアプローチ:最良の結果は、オプティカルフローを他の測位システムと組み合わせることで得られます。私の最も信頼性の高い自律ビルドでは、オプティカルフローをGPS、気圧、その他のセンサーと組み合わせ、洗練された融合アルゴリズムを使用しています。
- 商用実装:DJIやSkydioなどのハイエンドシステムでは、オプティカルフローを包括的なナビゲーションシステムの一部として使用しています。これらは、GPS が使えない環境でも印象的な自律機能を提供します。
重要な自律運用では、オプティカルフローのみに頼ることはありません。この技術は、冗長な測位システムの一部として最もよく機能します。
結論
オプティカルフローセンサーは、GPS が使えない環境でのドローンの動作方法を変革しました。さまざまなオプティカルフローシステムを何年にもわたってテストし実装してきた結果、これらの見過ごされがちなコンポーネントが、安定した正確な屋内飛行にどれほど貢献しているかを理解するようになりました。
オプティカルフロー技術、実装方法、セットアップのベストプラクティスを理解することで、困難な環境での信頼性の高い位置保持のためにドローンを最適化できます。不安定な屋内飛行に苦労しているパイロットを見てきましたが、適切なオプティカルフローシステムを追加することで問題を完全に解決できることに気づいていませんでした。
技術は急速に進化し続けており、より洗練されたセンサーと処理アルゴリズムにより、より広範な条件でますます信頼性の高いパフォーマンスが可能になっています。適切なオプティカルフローシステムを選択し、適切に実装することで、GPS が利用できない環境でも、安定した正確な飛行を実現できます。
初めての位置保持ドローンを構築する場合でも、50 台目を構築する場合でも、オプティカルフローセンサーの選択とセットアップに注意を払うことで、飛行の安定性と信頼性が向上します。私はこれらの教訓の多くを、不安定な飛行、予期しないドリフト、何時間ものトラブルシューティングを通じて、困難な方法で学びました。うまくいけば、私の経験があなたがこれらの痛みを伴う教訓のいくつかを避け、位置保持システムを最大限に活用するのに役立つでしょう。


