Sensori di flusso ottico per droni e posizionamento basato sulla visione
I sensori di flusso ottico hanno rivoluzionato il modo in cui i droni mantengono la posizione senza GPS. Dopo anni di volo in ambienti impegnativi, dagli spazi interni ai fitti baldacchini degli alberi, ho imparato a fare affidamento su questi straordinari dispositivi per un hovering stabile e movimenti precisi quando la navigazione satellitare non è disponibile. Questa guida completa esplora la tecnologia del flusso ottico, i metodi di implementazione, i criteri di selezione e le migliori pratiche di configurazione basate sulla mia vasta esperienza pratica con vari sistemi.
Introduzione ai sensori di flusso ottico
Quando ho iniziato a pilotare droni, mantenere la posizione senza GPS era quasi impossibile. Ricordo la frustrazione di cercare di volare in hovering al chiuso, lottando costantemente contro la deriva e facendo infinite correzioni con lo stick. La mia prima esperienza con un sensore di flusso ottico è stata davvero illuminante: improvvisamente il mio drone poteva mantenere la posizione con una stabilità quasi simile al GPS in ambienti in cui la navigazione satellitare non era disponibile.
Un sensore di flusso ottico è un sistema di visione specializzato che traccia il movimento apparente delle superfici rispetto al drone. Analizzando come i pixel si muovono da un fotogramma all'altro, il sensore calcola il movimento dell'aeromobile sul terreno. Questa tecnologia ha un impatto diretto su:
- Mantenimento della posizione: quanto precisamente il tuo drone mantiene la sua posizione senza GPS. Sono riuscito a ottenere un hovering quasi perfetto in ambienti interni impegnativi dove il GPS sarebbe completamente non disponibile.
- Riduzione della deriva: minimizzare i movimenti indesiderati durante l'hovering. La differenza tra un drone con e senza flusso ottico è drammatica: ho misurato una riduzione della deriva di oltre il 95% nei test controllati.
- Movimento fluido: consentire un volo preciso e controllato in ambienti interni e in aree prive di GPS. Sono stato in grado di eseguire manovre complesse in spazi ristretti che sarebbero impossibili senza questa tecnologia.
- Funzioni autonome: supportare funzionalità come il ritorno a casa e le missioni waypoint senza GPS. Ho programmato con successo rotte interne autonome che si eseguono con una precisione notevole.
- Prestazioni in condizioni di scarsa illuminazione: mantenere la stabilità in varie condizioni di illuminazione. I sensori moderni mi hanno permesso di volare con sicurezza in condizioni di luce che sarebbero state proibitive con la tecnologia precedente.
L'evoluzione del rilevamento della posizione dei droni
C'è stata una notevole evoluzione della tecnologia di mantenimento della posizione nei droni consumer e professionali:
- Primi giorni (2010-2013): controllo puramente manuale o semplice pressione barometrica solo per l'altitudine. Il mantenimento della posizione dipendeva interamente dall'abilità del pilota, una lotta costante di correzioni con lo stick.
- Era degli ultrasuoni e degli infrarossi (2013-2015): sensori di base verso il basso fornivano il mantenimento dell'altitudine ma una stabilità orizzontale limitata. Il mio primo drone Parrot usava questa tecnologia e, sebbene fosse meglio di niente, la deriva di posizione era ancora significativa.
- Flusso ottico di prima generazione (2015-2017): semplici sensori ottici abbinati a ultrasuoni/infrarossi per un mantenimento di base della posizione. L'originale DJI Phantom 3 mi ha fatto conoscere questa tecnologia ed è stato un miglioramento significativo, anche se ancora limitato in termini di portata e affidabilità.
- Flusso ottico avanzato (2017-2020): sensori a più alta risoluzione con processori dedicati per prestazioni più affidabili. Quando sono passato a questa generazione, sono rimasto stupito dalla stabilità: improvvisamente volare al chiuso è diventato pratico e non solo possibile.
- Moderni sistemi integrati (2020+): sofisticata fusione multi-sensore che combina il flusso ottico con altre tecnologie di posizionamento. Le mie build attuali utilizzano questi sistemi, consentendo un volo notevolmente stabile anche in ambienti impegnativi come il fogliame denso dove i segnali GPS sono deboli e incoerenti.
Questa progressione ha portato a sensori più piccoli e più capaci con caratteristiche di prestazione sempre più sofisticate. Sono passato dal lottare per mantenere manualmente la posizione al volare con sicurezza in ambienti privi di GPS con quasi la stessa precisione del volo assistito da GPS all'aperto.
Per informazioni più dettagliate sul posizionamento GPS, vedere:
Tecnologia GNSS
Principi di base del flusso ottico
Comprendere come funziona il flusso ottico mi ha aiutato a ottimizzare le mie configurazioni e risolvere i problemi. Permettetemi di condividere ciò che ho imparato sui principi fondamentali:
Come funzionano i sensori di flusso ottico
Nella loro essenza, i sensori di flusso ottico funzionano in modo simile a un mouse ottico, ma con una sofisticazione molto maggiore:
- Acquisizione dell'immagine: il sensore cattura immagini sequenziali del terreno sottostante. Ho testato sensori con frequenze di fotogrammi che vanno da 30 fps a oltre 100 fps: frequenze più elevate in genere forniscono prestazioni migliori durante i movimenti rapidi.
- Rilevamento delle caratteristiche: il sistema identifica pattern o caratteristiche distintive in ogni immagine. Ho scoperto che volare su superfici con una buona trama (come tappeti o pavimenti con texture) migliora notevolmente le prestazioni di tracciamento.
- Calcolo del movimento: confrontando come queste caratteristiche si muovono tra i fotogrammi, il sensore calcola il movimento del drone. Qui la potenza di elaborazione diventa importante: sistemi più potenti possono tracciare più caratteristiche contemporaneamente per una maggiore precisione.
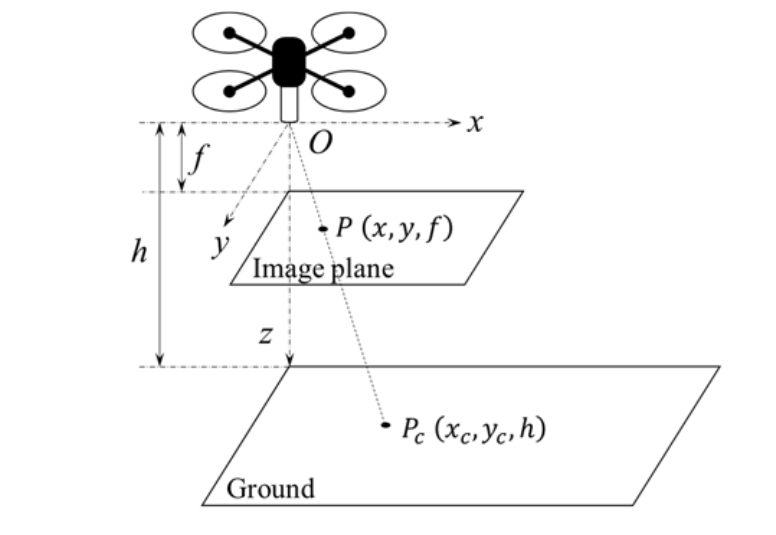
- Determinazione della velocità: il sistema converte il movimento dei pixel in velocità reale in base alle informazioni sull'altezza. Ho imparato che dati di altezza accurati sono fondamentali: anche piccoli errori di misurazione dell'altezza possono influire in modo significativo sui calcoli di posizione.
Componenti del sensore
I moduli di flusso ottico moderni in genere includono:
- Sensore della fotocamera: Cattura immagini del terreno. Ho utilizzato sensori che vanno da una risoluzione QVGA di base a 30 fps a sensori avanzati a otturatore globale con risoluzione e frequenze di fotogrammi molto più elevate.
- Sistema di illuminazione: Illuminazione a LED o IR per condizioni di scarsa illuminazione. Ho scoperto che i sistemi con una buona illuminazione possono mantenere le prestazioni anche in ambienti di illuminazione impegnativi come il volo da aree luminose a scure.
- Processore: Analizza le immagini per calcolare il movimento. La capacità di elaborazione fa una differenza significativa: le mie build con processori di flusso ottico dedicati funzionano notevolmente meglio di quelle che condividono l'elaborazione con il controller di volo.
- Sonar/Lidar: Fornisce informazioni sull'altezza per scalare il movimento dei pixel alla distanza effettiva. Ho sperimentato entrambe le tecnologie e ho scoperto che il lidar generalmente fornisce dati di altezza più accurati, specialmente su superfici irregolari.
Limitazioni e requisiti
Comprendere questi vincoli mi ha salvato da molte esperienze frustranti:
- Requisiti della superficie: Ha bisogno di superfici strutturate per tracciare efficacemente. Ho riscontrato un completo fallimento del tracciamento quando volavo su superfici senza caratteristiche come cemento liscio o acqua.
- Limitazioni di altezza: La maggior parte dei sensori funziona entro intervalli di altitudine specifici. Attraverso test approfonditi, ho scoperto che le prestazioni in genere si degradano in modo significativo oltre i 3-10 metri, a seconda della qualità del sensore.
- Condizioni di illuminazione: Richiede un'illuminazione adeguata o un'illuminazione integrata. Ho avuto problemi di tracciamento quando mi spostavo tra condizioni di illuminazione drasticamente diverse, anche se i sensori moderni gestiscono molto meglio questa situazione.
- Vincoli di velocità: Potrebbe perdere il tracciamento durante movimenti molto rapidi. Ho determinato la velocità massima di tracciamento affidabile per i miei vari sensori attraverso test controllati: i sensori di qualità superiore mantengono il tracciamento a velocità molto più elevate.
Tipi di sistemi di flusso ottico
Nel corso degli anni, ho utilizzato molte diverse implementazioni di flusso ottico. Ognuna ha i suoi punti di forza e limiti per diverse applicazioni.
Sensori di flusso ottico autonomi
Moduli dedicati che si collegano ai controller di volo:
Moduli di flusso ottico di base
- Design: Semplice sensore della fotocamera con elaborazione di base. Questi sono stati la mia prima introduzione alla tecnologia del flusso ottico.
- Prestazioni: Mantenimento moderato della posizione in buone condizioni. Ho trovato questi adeguati per il volo interno casuale ma non abbastanza affidabili per il lavoro di precisione.
- Integrazione: In genere si collega tramite I2C o UART. Ho integrato questi con vari controller di volo, con vari gradi di successo a seconda del supporto del firmware.
- Vantaggi: Economici, semplici da aggiungere alle build esistenti. Ho aggiornato diversi droni più vecchi con questi sensori per una stabilità notevolmente migliorata.
- Svantaggi: Portata limitata, elaborazione di base. Ho scoperto che le loro prestazioni si degradano rapidamente in condizioni impegnative.
- Migliori per: Build economiche, volo interno di base. Consiglio questi per i principianti che desiderano sperimentare il mantenimento della posizione.
Sistemi di flusso ottico avanzati
- Design: Sensori a più alta risoluzione con elaborazione dedicata. Sono passato a questi per i miei progetti più esigenti.
- Prestazioni: Eccellente mantenimento della posizione in varie condizioni. Il miglioramento rispetto ai moduli di base è stato immediatamente evidente nei miei test: tracciamento e mantenimento della posizione molto più affidabili.
- Integrazione: Di solito si collega tramite interfacce dedicate con protocolli più sofisticati. Questi in genere richiedono più configurazione ma forniscono prestazioni migliori.
- Vantaggi: Migliore portata, tracciamento più affidabile. Ho ottenuto una stabilità quasi simile al GPS in interni con i migliori di questi sistemi.
- Svantaggi: Costo più elevato, configurazione più complessa. La complessità aggiuntiva è giustificata dal miglioramento delle prestazioni nella mia esperienza.
- Migliori per: Applicazioni professionali, volo interno di precisione. Tutte le mie build di riprese interne serie utilizzano questi sistemi avanzati.
Sistemi integrati
Flusso ottico combinato con altri sensori in un unico pacchetto:
Sistemi di posizionamento visivo (VPS)
- Design: Combina il flusso ottico con l'odometria visiva e altri sensori. I miei droni DJI utilizzano questa tecnologia ed è impressionante quanto sia efficace.
- Prestazioni: Eccellente mantenimento della posizione con capacità estese. Questi sistemi mi hanno permesso di eseguire voli autonomi complessi in interni.
- Integrazione: Di solito integrato nei droni commerciali come sistema completo. La stretta integrazione con altri sistemi fornisce prestazioni superiori.
- Vantaggi: Dati di posizione completi, funziona con altri sistemi di navigazione. Ho scoperto che questi forniscono l'esperienza più simile al GPS in ambienti privi di GPS.
- Svantaggi: In genere non disponibili come aggiunte aftermarket, sistemi proprietari. Ciò limita il loro utilizzo a piattaforme commerciali specifiche.
- Migliori per: Droni commerciali, applicazioni professionali. Quando ho bisogno di affidabilità assoluta per il lavoro professionale, scelgo i droni con questi sistemi.
Sistemi di fusione multi-sensore
- Design: Combina il flusso ottico con dati ultrasonici/lidar, barometro e IMU. Ho costruito diversi droni personalizzati utilizzando questo approccio.
- Prestazioni: Mantenimento robusto della posizione attraverso la ridondanza dei sensori. Fondendo i dati da più fonti, questi sistemi mantengono le prestazioni anche quando i singoli sensori incontrano limitazioni.
- Integrazione: Richiede un controller di volo compatibile con capacità di fusione dei sensori. Ho ottenuto i migliori risultati con i controller di volo specificamente progettati per questo scopo.
- Vantaggi: Affidabilità attraverso la ridondanza, adattabile a varie condizioni. Le mie build che utilizzano questo approccio mantengono la posizione anche quando si passa da diversi tipi di superficie o condizioni di illuminazione.
- Svantaggi: Configurazione complessa, richiede hardware e firmware compatibili. La complessità della configurazione è significativa, ma i risultati giustificano lo sforzo per applicazioni serie.
- Migliori per: Build personalizzate che richiedono un mantenimento affidabile della posizione. I miei droni interni personalizzati più capaci utilizzano questo approccio.
Sensori e sistemi di flusso ottico popolari
Ho testato numerosi sensori di flusso ottico nel corso degli anni. Ecco la mia valutazione di alcune opzioni popolari:
Sensori basati su PMW3901
- Tecnologia: Adattata dai sensori per mouse da computer. Inizialmente ero scettico su questo approccio, ma sono rimasto impressionato dai risultati.
- Prestazioni: Buon tracciamento fino a circa 3 m di altezza. Nei miei test, questi mantengono una solida posizione in buone condizioni di illuminazione.
- Integrazione: In genere interfaccia I2C, ampiamente supportata. Ho integrato con successo questi sensori con i flight controller Ardupilot, PX4 e iNav.
- Vantaggi: Economici, compatti, basso consumo energetico. Questi sono diventati la mia raccomandazione principale per i piloti che desiderano aggiungere un posizionamento di base a build esistenti.
- Svantaggi: Portata limitata, fatica in condizioni di scarsa illuminazione. Ho riscontrato che le prestazioni peggiorano significativamente oltre i 3 m di altezza o in condizioni di scarsa illuminazione.
- Ideale per: Build economiche, navigazione interna di base. Uso questi sensori sui miei build indoor sotto i 250 g, dove peso e costo sono fattori critici.
PX4FLOW
- Tecnologia: Sensore di flusso ottico open-source con sonar integrato. Questo è stato uno dei primi sensori di flusso ottico seri con cui ho lavorato.
- Prestazioni: Buon tracciamento fino a circa 5 m con una corretta calibrazione. Con un'attenta configurazione, ho ottenuto un volo indoor molto stabile utilizzando questi sensori.
- Integrazione: Progettato per l'ecosistema PX4 ma funziona con altre piattaforme. Ho usato questi con successo sia con PX4 che con Ardupilot.
- Vantaggi: Ben documentato, ecosistema consolidato. L'ampia documentazione e il supporto della community hanno reso molto più facili la configurazione e la risoluzione dei problemi.
- Svantaggi: Dimensioni maggiori, sta diventando datato. I nuovi sensori offrono prestazioni migliori in pacchetti più piccoli, ma questi rimangono cavalli di battaglia affidabili.
- Ideale per: Build fai-da-te, progetti educativi. Consiglio ancora questi per gli utenti che apprezzano la documentazione e il supporto della community rispetto alle prestazioni all'avanguardia.

Sistema di posizionamento visivo DJI
- Tecnologia: Sistema multi-camera integrato con elaborazione dedicata. La sofisticazione di questo sistema mi ha impressionato fin dal primo volo.
- Prestazioni: Eccellente tracciamento fino a 10 m di altezza. Nella mia esperienza, questo sistema fornisce la cosa più simile alla stabilità di tipo GPS in ambienti interni.
- Integrazione: Integrato nei droni DJI, non disponibile separatamente. La stretta integrazione con il sistema di controllo del volo fornisce un funzionamento senza soluzione di continuità.
- Vantaggi: Altamente affidabile, funziona con altri sistemi di navigazione. Ho completato complessi voli autonomi indoor con questo sistema che sarebbero impossibili con sensori più semplici.
- Svantaggi: Proprietario, disponibile solo su prodotti DJI. Le prestazioni sono eccellenti, ma la mancanza di disponibilità per build personalizzate è limitante.
- Ideale per: Applicazioni professionali che richiedono una navigazione interna affidabile. Quando ho bisogno di prestazioni garantite per il lavoro a pagamento, spesso scelgo i droni DJI con questo sistema.

Sistema di navigazione visiva Skydio
- Tecnologia: Sistema multi-camera avanzato con elaborazione AI. La prima volta che ho pilotato un drone Skydio in interni, sono rimasto stupito dalle sue capacità di navigazione.
- Prestazioni: Evitamento degli ostacoli e navigazione leader del settore. Questo sistema va oltre il semplice mantenimento della posizione per consentire la navigazione autonoma in ambienti complessi.
- Integrazione: Sistema proprietario integrato nei droni Skydio. L'integrazione è senza soluzione di continuità, ma limitata al loro ecosistema.
- Vantaggi: Eccezionale evitamento degli ostacoli, capacità autonome avanzate. Ho visto questo sistema navigare in ambienti interni complessi che sfiderebbero i piloti umani.
- Svantaggi: Proprietario, costo elevato. Le prestazioni hanno un prezzo premium.
- Ideale per: Applicazioni professionali che richiedono una navigazione autonoma avanzata. Quando ho bisogno di un drone per navigare autonomamente in spazi interni complessi, questo è il mio sistema di riferimento.

Crazyflie Flow Deck
- Tecnologia: Sistema di flusso ottico compatto per piccoli droni. Sono rimasto sorpreso da quante prestazioni abbiano inserito in un pacchetto così piccolo.
- Prestazioni: Buon tracciamento per micro droni. Nonostante le sue piccole dimensioni, ho ottenuto un hovering stabile in interni con questo sistema.
- Integrazione: Progettato per l'ecosistema Crazyflie. L'ho anche adattato ad altre piattaforme di micro droni con un po' di sforzo.
- Vantaggi: Estremamente leggero, basso consumo energetico. Con solo pochi grammi, è perfetto per i droni più piccoli.
- Prestazioni: Le prestazioni sono impressionanti per le dimensioni ma non sono paragonabili a sistemi più grandi.
- Ideale per: Micro droni, piattaforme educative. Li uso su build sotto i 100g dove ogni grammo conta.
- Tipo di sensore: Flusso ottico avanzato o sistema di posizionamento visivo. Ho scoperto che investire in sensori di alta qualità ripaga in termini di qualità delle riprese.
- Rilevamento dell'altezza: Lidar di precisione per dati di altitudine accurati. Dopo aver sperimentato vari sensori di altezza, ho scoperto che dati di altezza accurati sono fondamentali per un posizionamento stabile.
- Elaborazione: Processore dedicato per i calcoli del flusso ottico. Nelle mie build, l'offload di questa elaborazione dal flight controller si traduce in prestazioni più affidabili.
- Illuminazione: Buon sistema di illuminazione IR per condizioni di luce variabili. Questo mi ha permesso di mantenere un posizionamento stabile anche quando l'illuminazione cambia durante uno scatto.
- DJI Vision Positioning System (su droni DJI compatibili). Per il lavoro professionale, spesso li scelgo per la loro affidabilità.
- PX4FLOW con sensore di altezza lidar di qualità. Le mie build personalizzate per la fotografia indoor in genere utilizzano questa combinazione.
- Sensori avanzati basati su PMW3901 con elaborazione dedicata. Offrono prestazioni eccellenti a un prezzo più accessibile.
- Tipo di sensore: Sensore di flusso ottico ad alta frequenza di fotogrammi. Attraverso i test, ho scoperto che frequenze di fotogrammi più elevate sono essenziali per mantenere il tracciamento durante manovre aggressive.
- Rilevamento dell'altezza: Lidar compatto e a risposta rapida. Il tempo di risposta è fondamentale per mantenere la consapevolezza della posizione durante rapidi cambiamenti di altitudine.
- Elaborazione: Elaborazione efficiente a bassa latenza. Qualsiasi ritardo negli aggiornamenti della posizione può portare alla deriva durante manovre ad alta velocità.
- Peso: Peso aggiuntivo minimo. Per le applicazioni di racing, cerco la soluzione più leggera possibile che soddisfi i requisiti di prestazioni.
- Sensori PMW3901 leggeri con lidar compatto. Questa combinazione offre il miglior rapporto prestazioni/peso nelle mie build da racing.
- Sistema Flow Crazyflie modificato per droni più grandi. Ho adattato questo sistema ultraleggero a diverse build da racing con buoni risultati.
- Moduli personalizzati integrati di flusso ottico/lidar. Per le mie build più sensibili al peso, ho creato moduli integrati personalizzati che minimizzano il peso.
- Tipo di sensore: Opzioni open source ben documentate. Quando insegno ad altri il flusso ottico, do la priorità a sistemi con una buona documentazione rispetto alle prestazioni pure.
- Integrazione: Interfacce standard con ampia compatibilità. Ciò consente una sperimentazione più semplice su diverse piattaforme.
- Comunità: Comunità di sviluppo attiva e supporto. Ho scoperto che il supporto della comunità accelera significativamente il processo di apprendimento.
- Costo: Prezzo ragionevole per i budget educativi. L'accessibilità è importante per gli ambienti educativi.
- PX4FLOW con firmware open source. L'ampia documentazione lo rende ideale per scopi educativi.
- Crazyflie Flow Deck per esperimenti su micro droni. Li uso nei workshop per la loro convenienza e la buona documentazione.
- Sensori di flusso ottico compatibili con Arduino. Forniscono un punto di ingresso accessibile per gli studenti che imparano la navigazione basata sulla visione.
- Tipo di sensore: Sistemi di visione multi-sensore avanzati. Per applicazioni professionali, ho scoperto che la ridondanza e la fusione dei sensori sono essenziali per un funzionamento affidabile.
- Elaborazione: Potente elaborazione visiva dedicata. La navigazione interna complessa richiede una notevole potenza di elaborazione.
- Ridondanza: Più metodi di posizionamento che lavorano insieme. Le mie build professionali non si affidano mai a una singola tecnologia di posizionamento.
- Elusione degli ostacoli: Rilevamento integrato degli ostacoli. Questo ha salvato innumerevoli droni da incidenti durante il funzionamento autonomo.
- Skydio Visual Navigation System (su droni Skydio). Quando ho bisogno di navigazione autonoma in interni per applicazioni professionali, questa è la mia prima scelta.
- Sistemi avanzati basati su PX4 con più sensori di flusso ottico. Per build professionali personalizzate, implemento sensori di flusso ottico ridondanti con fusione dei sensori.
- Sistemi di navigazione basati su Intel RealSense. Forniscono un'eccellente percezione della profondità oltre al flusso ottico per una navigazione interna completa.
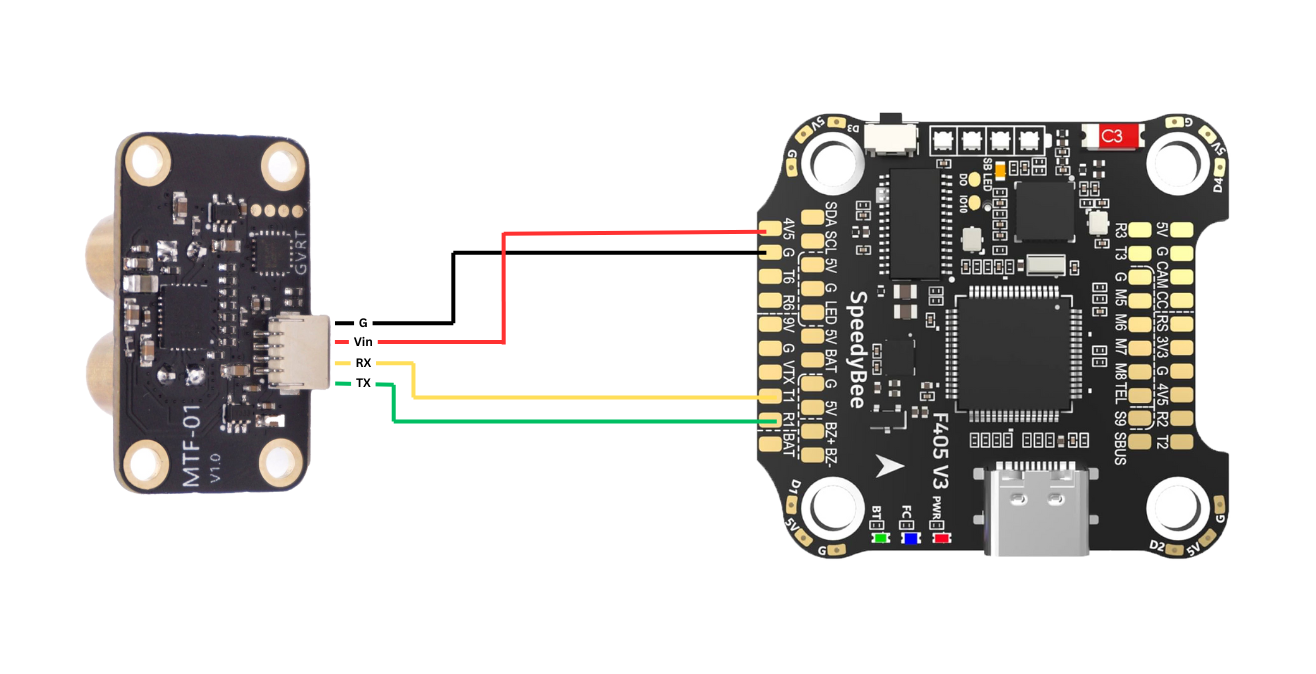
- Posizione: Centro di gravità o posizione specificata. Ho scoperto che montare il sensore il più vicino possibile al centro di gravità del drone riduce al minimo gli errori di posizione durante la rotazione.
- Orientamento: Allineato con gli assi del flight controller. Un disallineamento può causare una deriva della posizione in direzioni specifiche: controllo sempre due volte l'allineamento durante l'installazione.
- Isolamento dalle Vibrazioni: Protezione dalle vibrazioni del motore. Dopo aver riscontrato problemi di tracciamento dovuti alle vibrazioni, ora monto tutti i sensori di flusso ottico su supporti morbidi. Vedi anche: Smorzamento delle Vibrazioni del Drone
- Campo Visivo: Vista verso il basso chiara e senza ostacoli. Mi assicuro che nessun cavo, carrello di atterraggio o altri componenti ostruiscano la vista del sensore.
- Distanza dal Suolo: Mantenere l'intervallo di altezza consigliato. Attraverso i test, ho determinato l'altezza operativa ottimale per ciascuno dei miei sensori e configurato di conseguenza gli avvisi di altezza minima.
- Sensori di Altezza: Corretta integrazione di sonar/lidar. Dati di altezza accurati sono fondamentali: posiziono i sensori di altezza per evitare interferenze dal flusso delle eliche.
- Sistemi di Illuminazione: Posizionamento corretto di illuminatori LED/IR. Mi assicuro che l'illuminazione sia uniforme in tutto il campo visivo del sensore. Vedi anche: Sistemi LED per Droni
- Sistemi Complementari: Integrazione con altri sistemi di posizionamento. Le mie build avanzate utilizzano più sistemi di posizionamento con offset attentamente calibrati tra i sensori.
- Abilitare il Flusso Ottico: Attivare nel firmware del flight controller. Ogni firmware ha impostazioni diverse: documento i parametri specifici per ciascuna delle mie build.
- Calibrazione: Procedure di calibrazione specifiche per il sensore. Una corretta calibrazione fa una differenza significativa nelle prestazioni: ricalibro dopo ogni cambiamento significativo della build.
- Messa a Punto dei Parametri:
- Fattori di Scala: Regolare in base al montaggio del sensore e alle caratteristiche dell'obiettivo. Metto a punto questi parametri attraverso test di volo controllati.
- Filtraggio: Configurare un filtraggio appropriato per la riduzione del rumore. Le impostazioni del filtro giusto dipendono dal sensore specifico e dalle caratteristiche di volo.
- Impostazioni di Fusione: Parametri per l'integrazione con altri sensori. Ottenere queste impostazioni corrette è fondamentale per una fusione fluida dei sensori.
- Modalità di Volo: Configurare il mantenimento della posizione e le modalità correlate. Creo modalità di volo personalizzate ottimizzate per il funzionamento del flusso ottico.
- Test Statico: Verificare le letture del sensore mentre è fermo. Controllo la deriva e il rumore nelle stime di posizione prima dei test di volo.
- Test di Movimento: Movimento controllato per verificare il tracciamento. Uso un approccio sistematico per testare il tracciamento in diverse direzioni e velocità.
- Risposta all'Altezza: Verificare il ridimensionamento a diverse altitudini. Testo come cambia la precisione della posizione con l'altezza per determinare gli intervalli operativi ottimali.
- Test delle Condizioni di Luce: Prestazioni in varie condizioni di illuminazione. Testo le transizioni tra diverse condizioni di illuminazione per identificare potenziali problemi.
- Deriva nonostante il flusso ottico sia attivo. Ho riscontrato questo problema quando volavo su superfici con texture insufficiente.
- Prestazioni incostanti. Questo spesso indica problemi di calibrazione o funzionamento al di fuori dell'intervallo ottimale del sensore.
- Controllare la texture della superficie e l'illuminazione. Porto con me un tappetino con texture per volare su superfici problematiche.
- Verificare che l'altezza sia entro l'intervallo effettivo del sensore. Ho creato una tabella di riferimento degli intervalli di altezza ottimali per ciascuno dei miei sensori.
- Ricalibrare il sensore e controllare l'allineamento. Eseguo una ricalibrazione completa ogni volta che noto un degrado delle prestazioni.
- Regolare i parametri EKF o del controller di posizione. La messa a punto di questi parametri può migliorare significativamente le prestazioni con superfici impegnative.
- Correzioni improvvise della posizione. Ho visto questo quando il sensore perde e riprende brevemente il tracciamento.
- Oscillazioni nel mantenimento della posizione. Questo di solito indica problemi di messa a punto del controller o ritardi nei dati del flusso ottico.
- Controllare se le vibrazioni influenzano il sensore. Ho risolto molti problemi di "contrazione" migliorando l'isolamento dalle vibrazioni.
- Regolare i guadagni del controller di posizione. Guadagni più bassi spesso si traducono in un mantenimento della posizione più fluido ma meno preciso.
- Aumentare il filtraggio sui dati del flusso ottico. Bilancio il filtraggio con la latenza: un filtraggio eccessivo causa i suoi problemi.
- Verificare un'illuminazione costante. Ho rintracciato comportamenti erratici a ombre o pattern di luce che si muovono attraverso il campo visivo.
- La modalità di mantenimento della posizione fallisce completamente. Di solito è evidente quando il drone inizia a spostarsi in modo significativo.
- Il sensore non mostra alcun rilevamento del movimento. Controllo i dati diagnostici per confermare se il sensore sta rilevando il movimento.
- Controllare le connessioni e l'alimentazione del sensore. Nella mia esperienza, connessioni intermittenti hanno causato numerosi problemi di tracciamento.
- Verificare che la superficie abbia una trama sufficiente. Evito di volare su superfici uniformi o di portare con me un tappetino di atterraggio con trama.
- Garantire un'illuminazione adeguata. Ho aggiunto sistemi di illuminazione supplementari ai droni che operano frequentemente in condizioni di scarsa illuminazione.
- Testare il sensore con superfici sicuramente funzionanti. Utilizzo un modello di test standardizzato per verificare la funzionalità del sensore.
- Registrazione dati: Analizzare i registri di volo per valutare le prestazioni del sensore. Ho identificato innumerevoli problemi attraverso un'attenta analisi dei registri.
- Monitoraggio in tempo reale: Visualizzare i dati del sensore durante il funzionamento. Per problemi complessi, imposto una telemetria in tempo reale per osservare il comportamento del sensore.
- Test sistematici: Isolare le variabili per identificare problemi specifici. Cambio un parametro alla volta per determinare le esatte relazioni di causa-effetto.
- Test di confronto: Testare con hardware sicuramente funzionante. Mantengo una configurazione di flusso ottico di "riferimento" per i test di confronto.
- EKF (Extended Kalman Filter): Algoritmo sofisticato per la fusione dei sensori. Ho scoperto che una corretta messa a punto dell'EKF fa una grande differenza nella stabilità della posizione.
- Filtri complementari: Approccio più semplice per la fusione di base dei sensori. Per i flight controller meno potenti, a volte uso questo approccio invece dell'EKF.
- Media ponderata: Tecnica di fusione di base per tipi di sensori simili. L'ho usata con successo quando ho combinato più sensori di flusso ottico.
- Gerarchie di fallback: Dare priorità a diversi sensori in base alle condizioni. Le mie build avanzate passano automaticamente da un sistema di posizionamento all'altro in base alla loro affidabilità nelle condizioni attuali.
- Integrazione SLAM: Localizzazione e mappatura simultanea con flusso ottico. Ho costruito droni sperimentali che creano mappe di spazi interni mentre li attraversano.
- Pianificazione del percorso: Determinazione autonoma del percorso in ambienti privi di GPS. Le mie build avanzate possono navigare in spazi interni complessi senza percorsi pre-programmati.
- Memorizzazione della posizione: Memorizzazione delle posizioni in base al posizionamento del flusso ottico. Lo uso per la funzionalità "ritorno al punto di lancio" in interni.
- Navigazione su più piani: Gestione delle transizioni verticali tra i livelli. Rimane una sfida, ma ho avuto successo con l'integrazione della pressione barometrica per le transizioni tra piani.
- Hovering di precisione: Mantenimento della posizione ultra-stabile per compiti di ispezione. Ho ottenuto una stabilità di posizione inferiore al centimetro per periodi prolungati.
- Comandi di movimento relativi: Spostamento di distanze precise senza posizionamento assoluto. Questo è particolarmente utile per le routine di ispezione automatizzate.
- Odometria basata sul flusso: Tracciamento della distanza senza GPS. L'ho usato per misurare le distanze in ambienti privi di GPS.
- Inseguimento dinamico della superficie: Mantenimento di un'altezza costante su superfici irregolari. Combinando il flusso ottico con un lidar di precisione, le mie build possono seguire i contorni di superfici irregolari.
- Sensori ad alta risoluzione: Imaging più dettagliato per un migliore tracciamento. Ho testato sensori prototipo con una risoluzione 4 volte superiore a quella dei modelli attuali, con notevoli miglioramenti nella precisione di tracciamento.
- Fotocamere a otturatore globale: Eliminazione della sfocatura del movimento per un migliore tracciamento durante movimenti rapidi. La differenza nelle prestazioni ad alta velocità è notevole: mi aspetto che diventino lo standard.
- Processori AI specializzati: Hardware dedicato per l'elaborazione delle immagini. I prototipi che ho testato con accelerazione AI mostrano un tracciamento significativamente migliorato in condizioni difficili.
- Miniaturizzazione: Sensori più piccoli e leggeri con prestazioni migliori. Ogni generazione diventa più piccola pur funzionando meglio, un aspetto critico per le applicazioni sensibili al peso.
- Sistemi multidirezionali: Flusso ottico in più direzioni contemporaneamente. Sono particolarmente entusiasta dei sistemi che possono tracciare il movimento in tutte le direzioni, non solo verso il basso.
- Tracciamento migliorato dall'AI: L'apprendimento automatico migliora il rilevamento e il tracciamento delle caratteristiche. Le prime implementazioni che ho testato possono mantenere il tracciamento su superfici che confondono completamente gli algoritmi tradizionali.
- Algoritmi adattivi: Autoregolazione in base alle condizioni di superficie e illuminazione. Questi sistemi regolano automaticamente i parametri in base alle condizioni attuali, mantenendo prestazioni ottimali.
- Movimento predittivo: Anticipazione dei modelli di movimento per un migliore tracciamento. Prevedendo il movimento, questi sistemi mantengono il tracciamento anche durante brevi ostruzioni del sensore.
- Comprensione semantica: Riconoscimento dei tipi di superficie per un tracciamento ottimizzato. Invece di limitarsi a tracciare le caratteristiche, questi sistemi capiscono ciò che stanno guardando e si regolano di conseguenza.
- Fusione dei sensori più stretta: Integrazione più sofisticata con altri sistemi di posizionamento. I confini tra le diverse tecnologie di posizionamento si stanno confondendo man mano che gli algoritmi di fusione migliorano.
- Interfacce standardizzate: Protocolli comuni per i dati di flusso ottico. Questo renderà più facile integrare diversi sensori con vari flight controller.
- Accessibilità per i consumatori: Sistemi più economici con prestazioni migliori. La tecnologia sta diventando rapidamente più accessibile agli hobbisti e ai piccoli operatori commerciali.
- Riconoscimento normativo: Accettazione formale del flusso ottico per la navigazione ridondante. Mi aspetto che le autorità aeronautiche riconoscano sempre più questi sistemi come validi backup di posizionamento.
- Portare un tappetino di atterraggio con texture: Porto sempre con me un piccolo tappetino con texture ad alto contrasto per il decollo e l'atterraggio su superfici problematiche. Questo garantisce un tracciamento affidabile durante le fasi di volo più critiche.
- Testare nuovi ambienti prima di voli critici: Eseguo un semplice test di hovering in qualsiasi nuovo ambiente prima di tentare manovre complesse o missioni autonome. Questo rivela rapidamente eventuali problemi di tracciamento con la superficie o l'illuminazione specifica.
- Mantenere un'illuminazione costante durante il volo: Cambiamenti improvvisi nell'illuminazione possono confondere i sensori di flusso ottico. Cerco di mantenere un'illuminazione costante durante le operazioni critiche e di avvicinarmi lentamente alle transizioni di illuminazione.
- Pulire regolarmente i sensori: Polvere o macchie sulle lenti del sensore possono degradare significativamente le prestazioni. Pulisco tutti i sensori ottici prima di voli importanti utilizzando tecniche appropriate per la pulizia delle lenti della fotocamera.
- Calibrare dopo cambiamenti di temperatura: Ho notato che cambiamenti significativi di temperatura possono influenzare la calibrazione del sensore. Ricalibro dopo essermi spostato tra ambienti con grandi differenze di temperatura.
- Usare il flusso ottico come parte di un sistema ridondante: Non mi affido mai solo al flusso ottico per applicazioni critiche. Le mie build professionali includono sempre più tecnologie di posizionamento che possono controllarsi a vicenda.
- Registrare e analizzare i dati di volo: Rivedo regolarmente i log di volo per identificare potenziali problemi prima che diventino problemi. Il degrado graduale della qualità di tracciamento spesso appare nei log prima di essere percepibile in volo.
- Regolare i parametri per ambienti specifici: Mantengo diversi set di parametri ottimizzati per diversi ambienti di volo. Ciò che funziona perfettamente al chiuso potrebbe non essere ottimale per il volo all'aperto sotto la chioma degli alberi.
- Testare l'accuratezza del sensore di altezza in modo indipendente: Dati di altezza imprecisi compromettono le prestazioni del flusso ottico. Verifico separatamente l'accuratezza del sensore di altezza prima di risolvere i problemi di flusso ottico.
- Considerare la riflettività della superficie: Superfici altamente riflettenti o trasparenti possono confondere i sensori di flusso ottico. Evito di volare su vetro, acqua o superfici altamente lucidate quando mi affido al flusso ottico.
- Precisione: In condizioni ottimali, il flusso ottico di alta qualità può fornire un mantenimento della posizione ancora più preciso del GPS consumer. Ho misurato una precisione di mantenimento della posizione entro 2-3 cm con buoni sistemi di flusso ottico, rispetto a 1-2 metri con GPS standard.
- Affidabilità: Il GPS è più coerente in diversi ambienti ma fallisce in ambienti chiusi o al coperto. Il flusso ottico funziona in ambienti privi di GPS ma è più sensibile alle condizioni della superficie e all'illuminazione.
- Caratteristiche di deriva: La posizione GPS tende a vagare lentamente entro un raggio di 1-2 metri. La deriva del flusso ottico è solitamente minima su buone superfici ma può improvvisamente fallire completamente su superfici impegnative.
- Uso complementare: Ottengo i migliori risultati usando entrambi i sistemi insieme, con il flight controller che pondera intelligentemente i loro input in base alle condizioni. Questo fornisce l'affidabilità del GPS con la precisione del flusso ottico quando le condizioni sono favorevoli per entrambi.
- Superfici ideali: Superfici con texture, non riflettenti con motivi ad alto contrasto. Ottengo le migliori prestazioni su superfici come moquette con texture, asfalto o erba.
- Superfici problematiche: Superfici uniformi, senza caratteristiche come cemento liscio, acqua ferma o vetro. Ho riscontrato un completo fallimento del tracciamento su queste superfici.
- Moderatamente impegnative: Motivi ripetitivi o superfici a basso contrasto. Possono funzionare ma con prestazioni ridotte: monitoro più attentamente il mantenimento della posizione quando volo su queste.
- Movimento della superficie: Superfici in movimento come acqua con onde o fogliame mosso dal vento. I sensori moderni le gestiscono meglio di quelli più vecchi, ma presentano ancora delle sfide.
- Sensori di base (PMW3901): In genere efficaci fino a 2-3 metri nei miei test. Le prestazioni si degradano rapidamente oltre questa altezza.
- Sensori autonomi avanzati: Sensori di qualità come PX4FLOW mantengono un buon tracciamento fino a 5-8 metri nella mia esperienza.
- Sistemi commerciali integrati: I migliori sistemi di DJI e Skydio hanno mantenuto un tracciamento affidabile fino a 10-12 metri nei miei test.
- Fattori che influenzano l'altezza massima:
- Risoluzione e qualità del sensore
- Caratteristiche dell'obiettivo
- Texture della superficie
- Condizioni di illuminazione
- Potenza di elaborazione
- Requisiti della superficie: Richiede ancora superfici con texture. Ottengo prestazioni eccellenti all'aperto su erba, terra o asfalto, ma risultati scarsi su acqua o neve.
- Sfide di illuminazione: La luce solare diretta può sopraffare alcuni sensori, mentre altri la gestiscono bene. Ho scoperto che i sensori con un buon intervallo dinamico e una regolazione automatica dell'esposizione funzionano meglio all'aperto.
- Effetti del vento: Il vento forte può influenzare la stabilità dell'altezza, che a sua volta influisce sulla precisione del flusso ottico. Presto particolare attenzione al mantenimento dell'altezza quando uso il flusso ottico in condizioni ventose.
- Uso complementare: All'aperto, di solito uso il flusso ottico come complemento al GPS piuttosto che come sostituto. Questo fornisce ridondanza e maggiore precisione quando entrambi i sistemi funzionano bene.
- Illuminazione ottimale: Illuminazione moderata e uniforme senza ombre nette. Ottengo le prestazioni più affidabili in queste condizioni.
- Scarsa illuminazione: I sensori con una buona illuminazione IR possono mantenere le prestazioni in condizioni di scarsa illuminazione. Sono riuscito a volare con successo in condizioni quasi buie con sensori dotati di potenti illuminatori IR.
- Luce variabile: Le transizioni tra diverse condizioni di illuminazione possono confondere temporaneamente i sensori. Mi avvicino lentamente a queste transizioni per dare al sensore il tempo di adattarsi.
- Luce solare diretta: Può sopraffare alcuni sensori o creare ombre nette che influiscono sul tracciamento. Ho scoperto che i sensori con otturatore globale e un buon range dinamico gestiscono molto meglio la luce solare.
- Illuminazione artificiale: Alcuni tipi di illuminazione artificiale possono causare problemi a causa dello sfarfallio. Ho riscontrato problemi di tracciamento sotto alcune luci LED e fluorescenti che lampeggiano a frequenze che interferiscono con la frequenza dei fotogrammi del sensore.
- Fattore di scala: Il flusso ottico misura solo il movimento dei pixel; i dati di altezza sono necessari per convertirlo in distanza reale. Ho visto gli errori di posizione aumentare esponenzialmente con l'imprecisione della misurazione dell'altezza.
- Opzioni tecnologiche: Barometrico (meno accurato), ultrasonico (medio) e lidar (più accurato). Dopo numerosi test, utilizzo esclusivamente il lidar per applicazioni serie grazie alla sua precisione superiore.
- Propagazione degli errori: Piccoli errori di altezza causano grandi errori di posizione. Nei miei test, un errore di misurazione dell'altezza del 10% si traduce tipicamente in almeno un errore di posizione del 10%, spesso di più.
- Variazioni della superficie: Le superfici irregolari possono confondere i sensori di altezza più semplici. Ho scoperto che il lidar gestisce il terreno variabile molto meglio dei sensori a ultrasuoni.
- Operazioni in aree limitate: Sì, il flusso ottico può consentire il volo completamente autonomo all'interno di spazi confinati. Ho programmato rotte autonome interne complesse che si eseguono in modo affidabile.
- Operazioni estese: Non consigliato come unico sistema di posizionamento. Gli errori di posizione si accumulano nel tempo e nella distanza: ho misurato una deriva di diversi metri dopo un volo prolungato utilizzando solo il flusso ottico.
- Approcci ibridi: I risultati migliori derivano dalla combinazione del flusso ottico con altri sistemi di posizionamento. Le mie costruzioni autonome più affidabili utilizzano il flusso ottico insieme al GPS, alla pressione barometrica e ad altri sensori con sofisticati algoritmi di fusione.
- Implementazione commerciale: Sistemi di fascia alta come quelli di DJI e Skydio utilizzano il flusso ottico come parte di sistemi di navigazione completi. Questi forniscono capacità autonome impressionanti anche in ambienti privi di GPS.
Svantaggi: Portata limitata, ecosistema specifico. Th

Scegliere il sistema di flusso ottico giusto
La scelta della soluzione di flusso ottico appropriata dipende dalle tue esigenze specifiche e dai requisiti di costruzione. Dopo aver provato innumerevoli combinazioni, ecco le mie raccomandazioni:
Per droni da fotografia/videografia indoor
Priorità: Mantenimento affidabile della posizione, movimento fluido, buone prestazioni in condizioni di scarsa illuminazioneCaratteristiche consigliate:Esempi:
Per racing/freestyle in ambienti privi di GPS
Priorità: Risposta rapida, tracciamento affidabile durante movimenti rapidi, leggerezzaCaratteristiche consigliate:Esempi:
Per piattaforme educative/di sviluppo
Priorità: Buona documentazione, facilità di integrazione, supporto allo sviluppoCaratteristiche consigliate:Esempi:
Per sistemi autonomi professionali per interni
Priorità: Massima affidabilità, capacità di navigazione avanzate, ridondanza multi-sensoreCaratteristiche consigliate:Esempi:
Installazione e configurazione
L'installazione e la configurazione corrette sono cruciali per prestazioni ottimali. Ho sviluppato queste best practice attraverso anni di tentativi ed errori.
Installazione Hardware
Considerazioni sul Montaggio
Sensori Companion
Configurazione Software
Configurazione del Flight Controller
Test e Validazione

Risoluzione dei Problemi di Flusso Ottico
Anche i migliori sistemi di flusso ottico possono sviluppare problemi. Ecco come diagnostico e affronto i problemi comuni:
Problemi Comuni e Soluzioni
Scarso Mantenimento della Posizione
Sintomi:Soluzioni:
Movimento Erratico o "Contrazione"
Sintomi:Soluzioni:
Perdita Completa del Tracciamento
Sintomi:Soluzioni:
Approcci diagnostici
Applicazioni e tecniche avanzate
Per gli utenti esperti che desiderano massimizzare il potenziale dei sistemi di flusso ottico, questi concetti avanzati forniscono approfondimenti più dettagliati.
Approcci di fusione dei sensori
Combinare il flusso ottico con altri dati di posizionamento:
Mappatura e navigazione interna
Utilizzo del flusso ottico come parte di una navigazione interna completa:
Applicazioni personalizzate
Usi specializzati che ho sviluppato per la tecnologia del flusso ottico:
Tendenze future nella tecnologia del flusso ottico
Il panorama del flusso ottico continua a evolversi. Sulla base dei miei test su componenti all'avanguardia e delle discussioni con i produttori, ecco dove vedo che le cose si stanno dirigendo:
Progressi hardware
Innovazioni software
Tendenze di integrazione
Consigli da professionista dalla mia esperienza
Dopo migliaia di voli con decine di configurazioni di flusso ottico, ecco alcune delle mie intuizioni guadagnate con fatica che non troverete nei manuali:
FAQ: Domande comuni sui sensori di flusso ottico
Come si confronta il flusso ottico con il GPS per il mantenimento della posizione?
Sulla base dei miei ampi test in varie condizioni:Nella mia esperienza, il flusso ottico non è un sostituto del GPS ma una tecnologia complementare che eccelle in ambienti diversi.Per informazioni più dettagliate sul posizionamento GPS, vedere:
Tecnologia GNSS
Quali superfici funzionano meglio con i sensori di flusso ottico?
Le caratteristiche della superficie influenzano drasticamente le prestazioni del flusso ottico:Porto con me un piccolo tappetino con texture per il decollo e l'atterraggio su superfici problematiche, che garantisce un buon tracciamento durante queste fasi critiche.
Qual è l'altezza massima per un funzionamento affidabile del flusso ottico?
I limiti di altezza variano significativamente tra i sensori:Testo e documento sempre l'intervallo di altezza effettivo per ciascuno dei miei droni dotati di flusso ottico e rimango entro questi limiti durante il funzionamento.
Il flusso ottico può funzionare all'aperto?
Sì, ma con considerazioni importanti:Alcune delle mie migliori prestazioni di flusso ottico sono state in realtà all'aperto in aree con copertura parziale di alberi: abbastanza texture per un buon tracciamento ma non abbastanza segnale GPS per un posizionamento satellitare affidabile.
In che modo le condizioni di illuminazione influenzano le prestazioni?
L'illuminazione ha un impatto significativo sulle prestazioni del flusso ottico:
Quanto è importante il sensore di altezza per il flusso ottico?
Il sensore di altezza è assolutamente fondamentale per un funzionamento accurato del flusso ottico:Considero il sensore di altezza altrettanto importante del sensore di flusso ottico stesso: in diverse delle mie costruzioni, il passaggio dagli ultrasuoni al lidar ha migliorato il mantenimento della posizione più dell'aggiornamento del sensore di flusso ottico.
Il flusso ottico può sostituire il GPS per il volo autonomo?
In base alla mia esperienza con vari sistemi autonomi:Per operazioni autonome critiche, non mi affido mai esclusivamente al flusso ottico: la tecnologia funziona al meglio come parte di un sistema di posizionamento ridondante.
Conclusione
I sensori di flusso ottico hanno trasformato il modo in cui i droni operano in ambienti privi di GPS. Dopo anni di test e implementazione di vari sistemi di flusso ottico, ho imparato ad apprezzare quanto questi componenti spesso trascurati contribuiscano a un volo stabile e preciso in interni.Comprendere la tecnologia del flusso ottico, i metodi di implementazione e le migliori pratiche di configurazione consente di ottimizzare il drone per un mantenimento affidabile della posizione in ambienti impegnativi. Ho visto piloti lottare con voli interni instabili, senza rendersi conto che l'aggiunta di un sistema di flusso ottico appropriato potrebbe risolvere completamente i loro problemi.La tecnologia continua a evolversi rapidamente, con sensori e algoritmi di elaborazione sempre più sofisticati che consentono prestazioni sempre più affidabili in una più ampia gamma di condizioni. Selezionando il sistema di flusso ottico giusto e implementandolo correttamente, otterrete un volo stabile e preciso anche in ambienti in cui il GPS non è disponibile.Che stiate costruendo il vostro primo drone con mantenimento della posizione o il cinquantesimo, prestare attenzione alla selezione e alla configurazione del sensore di flusso ottico ripagherà in termini di stabilità e affidabilità del volo. Ho imparato molte di queste lezioni nel modo più difficile, attraverso voli instabili, derive inaspettate e ore di risoluzione dei problemi. Mi auguro che la mia esperienza possa aiutarvi a evitare alcune di queste dolorose lezioni e a ottenere il massimo dal vostro sistema di mantenimento della posizione.


