Capteurs de flux optique pour drones et positionnement basé sur la vision
Les capteurs de flux optique ont révolutionné la façon dont les drones maintiennent leur position sans GPS. Après des années de vol dans des environnements difficiles, des espaces intérieurs aux canopées denses, j'en suis venu à compter sur ces appareils remarquables pour un vol stationnaire stable et des mouvements précis lorsque la navigation par satellite n'est pas disponible. Ce guide complet explore la technologie du flux optique, les méthodes de mise en œuvre, les critères de sélection et les meilleures pratiques de configuration basées sur ma vaste expérience pratique avec divers systèmes.
Introduction aux capteurs de flux optique
Lorsque j'ai commencé à piloter des drones, maintenir une position sans GPS était presque impossible. Je me souviens de la frustration d'essayer de planer à l'intérieur, luttant constamment contre la dérive et faisant des corrections de manche sans fin. Ma première expérience avec un capteur de flux optique a été une véritable révélation - soudainement, mon drone pouvait maintenir sa position avec une stabilité presque similaire au GPS dans des environnements où la navigation par satellite n'était pas disponible.
Un capteur de flux optique est un système de vision spécialisé qui suit le mouvement apparent des surfaces par rapport au drone. En analysant comment les pixels se déplacent d'une image à l'autre, le capteur calcule le mouvement de l'appareil par rapport au sol. Cette technologie a un impact direct sur :
- Maintien de position : La précision avec laquelle votre drone maintient sa position sans GPS. J'ai obtenu un vol stationnaire presque parfait dans des environnements intérieurs difficiles où le GPS serait complètement indisponible.
- Réduction de la dérive : Minimiser les mouvements indésirables pendant le vol stationnaire. La différence entre un drone avec et sans flux optique est spectaculaire - j'ai mesuré une réduction de la dérive de plus de 95% lors de tests contrôlés.
- Mouvement fluide : Permettre un vol précis et contrôlé en intérieur et dans les zones sans GPS. J'ai pu effectuer des manœuvres complexes dans des espaces restreints qui seraient impossibles sans cette technologie.
- Fonctions autonomes : Prendre en charge des fonctionnalités comme le retour au point de départ et les missions de points de cheminement sans GPS. J'ai programmé avec succès des itinéraires intérieurs autonomes qui s'exécutent avec une précision remarquable.
- Performances en basse lumière : Maintenir la stabilité dans des conditions d'éclairage variables. Les capteurs modernes m'ont permis de voler en toute confiance dans des conditions d'éclairage qui auraient été rédhibitoires avec la technologie antérieure.
L'évolution de la détection de position des drones
Il y a eu une évolution remarquable de la technologie de maintien de position dans les drones grand public et professionnels :
- Débuts (2010-2013) : Contrôle purement manuel ou pression barométrique de base pour l'altitude uniquement. Le maintien de la position dépendait entièrement des compétences du pilote - une lutte constante de corrections au manche.
- Ère des ultrasons et de l'infrarouge (2013-2015) : Des capteurs descendants de base fournissaient un maintien d'altitude mais une stabilité horizontale limitée. Mon premier drone Parrot utilisait cette technologie, et bien que ce soit mieux que rien, la dérive de position était encore importante.
- Flux optique de première génération (2015-2017) : Des capteurs optiques simples associés à des ultrasons/infrarouges pour un maintien de position de base. Le DJI Phantom 3 original m'a initié à cette technologie, et c'était une amélioration significative, bien que toujours limitée en portée et en fiabilité.
- Flux optique avancé (2017-2020) : Des capteurs à plus haute résolution avec des processeurs dédiés pour des performances plus fiables. Lorsque je suis passé à cette génération, j'ai été stupéfait par la stabilité - soudainement, le vol en intérieur est devenu pratique plutôt que simplement possible.
- Systèmes intégrés modernes (2020+) : Fusion multi-capteurs sophistiquée combinant le flux optique avec d'autres technologies de positionnement. Mes constructions actuelles utilisent ces systèmes, permettant un vol remarquablement stable même dans des environnements difficiles comme un feuillage dense où les signaux GPS sont faibles et irréguliers.
Cette progression a conduit à des capteurs plus petits et plus performants avec des caractéristiques de performance de plus en plus sophistiquées. Je suis passé de la difficulté à maintenir manuellement la position à un vol en toute confiance dans des environnements sans GPS avec presque la même précision qu'un vol assisté par GPS à l'extérieur.
Pour plus d'informations détaillées sur le positionnement GPS, voir :
Technologie GNSS
Principes de base du flux optique
Comprendre comment fonctionne le flux optique m'a aidé à optimiser mes configurations et à résoudre les problèmes. Permettez-moi de partager ce que j'ai appris sur les principes fondamentaux :
Comment fonctionnent les capteurs de flux optique
À la base, les capteurs de flux optique fonctionnent de manière similaire à une souris optique, mais avec beaucoup plus de sophistication :
- Acquisition d'image : Le capteur capture des images séquentielles du sol en dessous. J'ai testé des capteurs avec des fréquences d'images allant de 30 ips à plus de 100 ips - des fréquences plus élevées offrent généralement de meilleures performances lors de mouvements rapides.
- Détection de caractéristiques : Le système identifie des motifs ou des caractéristiques distinctifs dans chaque image. J'ai constaté que voler au-dessus de surfaces avec une bonne texture (comme des tapis ou des revêtements de sol texturés) améliore considérablement les performances de suivi.
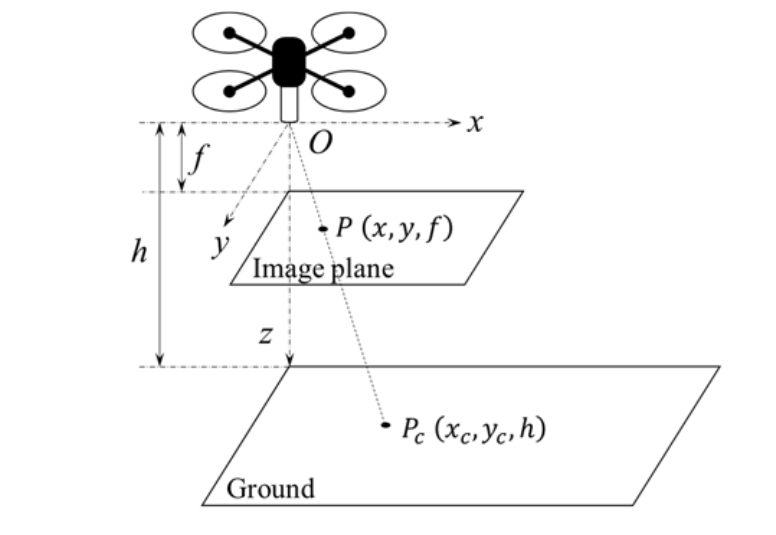
- Calcul du mouvement : En comparant comment ces caractéristiques se déplacent entre les images, le capteur calcule le mouvement du drone. C'est là que la puissance de traitement devient importante - des systèmes plus puissants peuvent suivre plus de caractéristiques simultanément pour une plus grande précision.
- Détermination de la vitesse : Le système convertit le mouvement des pixels en vitesse réelle en fonction des informations de hauteur. J'ai appris que des données de hauteur précises sont essentielles - même de petites erreurs de mesure de hauteur peuvent avoir un impact significatif sur les calculs de position.
Composants du capteur
Les modules de flux optique modernes comprennent généralement :
- Capteur de caméra : Capture des images du sol. J'ai utilisé des capteurs allant de la résolution QVGA de base à 30 fps à des capteurs à obturateur global avancés avec une résolution et des fréquences d'images beaucoup plus élevées.
- Système d'éclairage : Éclairage LED ou IR pour les conditions de faible luminosité. J'ai constaté que les systèmes avec un bon éclairage peuvent maintenir les performances même dans des environnements d'éclairage difficiles comme le vol de zones claires à sombres.
- Processeur : Analyse les images pour calculer le mouvement. La capacité de traitement fait une différence significative - mes constructions avec des processeurs de flux optique dédiés fonctionnent sensiblement mieux que celles qui partagent le traitement avec le contrôleur de vol.
- Sonar/Lidar : Fournit des informations de hauteur pour mettre à l'échelle le mouvement des pixels à la distance réelle. J'ai expérimenté les deux technologies et j'ai constaté que le lidar fournit généralement des données de hauteur plus précises, en particulier sur des surfaces inégales.
Limites et exigences
Comprendre ces contraintes m'a évité de nombreuses expériences frustrantes :
- Exigences de surface : Nécessite des surfaces texturées pour un suivi efficace. J'ai connu une défaillance de suivi complète lors d'un vol au-dessus de surfaces sans relief comme du béton lisse ou de l'eau.
- Limites de hauteur : La plupart des capteurs fonctionnent dans des plages d'altitude spécifiques. Grâce à des tests approfondis, j'ai constaté que les performances se dégradent généralement de manière significative au-delà de 3 à 10 mètres, selon la qualité du capteur.
- Conditions d'éclairage : Nécessite un éclairage adéquat ou un éclairage intégré. J'ai eu des défaillances de suivi lors du passage entre des conditions d'éclairage radicalement différentes, bien que les capteurs modernes gèrent beaucoup mieux cela.
- Contraintes de vitesse : Peut perdre le suivi lors de mouvements très rapides. J'ai déterminé la vitesse de suivi maximale fiable pour mes différents capteurs grâce à des tests contrôlés - les capteurs de meilleure qualité maintiennent le suivi à des vitesses beaucoup plus élevées.
Types de systèmes de flux optique
Au fil des années, j'ai utilisé de nombreuses implémentations différentes de flux optique. Chacune a ses forces et ses limites pour différentes applications.
Capteurs de flux optique autonomes
Modules dédiés qui se connectent aux contrôleurs de vol :
Modules de flux optique de base
- Conception : Capteur de caméra simple avec traitement de base. Ce fut ma première introduction à la technologie de flux optique.
- Performance : Maintien de position modéré dans de bonnes conditions. J'ai trouvé ceux-ci adéquats pour le vol intérieur occasionnel mais pas assez fiables pour un travail de précision.
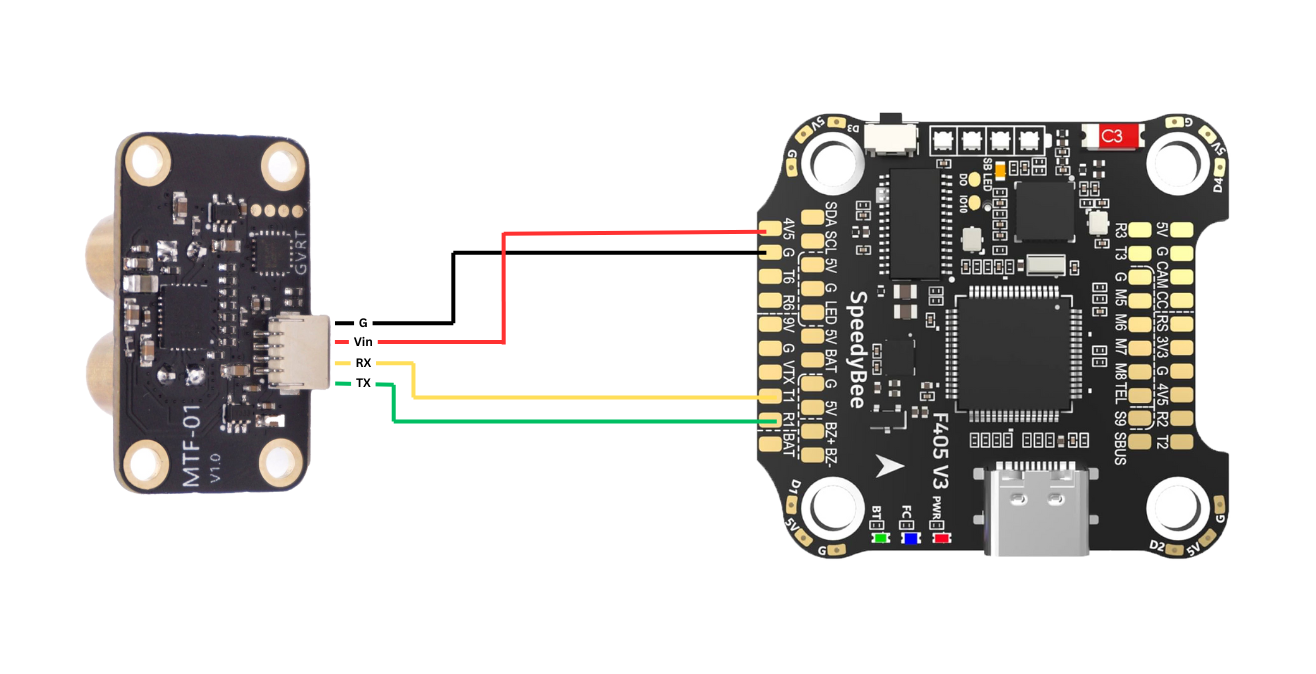
- Intégration : Se connecte généralement via I2C ou UART. J'ai intégré ceux-ci avec divers contrôleurs de vol, avec des degrés de succès variables selon la prise en charge du firmware.
- Avantages : Abordable, simple à ajouter aux constructions existantes. J'ai modernisé plusieurs anciens drones avec ces capteurs pour une stabilité grandement améliorée.
- Inconvénients : Portée limitée, traitement de base. J'ai constaté que leurs performances se dégradent rapidement dans des conditions difficiles.
- Idéal pour : Constructions économiques, vol intérieur de base. Je recommande ceux-ci aux débutants qui souhaitent expérimenter le maintien de position.
Systèmes de flux optique avancés
- Conception : Capteurs haute résolution avec traitement dédié. J'ai mis à niveau vers ceux-ci pour mes projets les plus exigeants.
- Performance : Excellent maintien de position dans diverses conditions. L'amélioration par rapport aux modules de base était immédiatement apparente dans mes tests - un suivi et un maintien de position beaucoup plus fiables.
- Intégration : Se connecte généralement via des interfaces dédiées avec des protocoles plus sophistiqués. Ceux-ci nécessitent généralement plus de configuration mais offrent de meilleures performances.
- Avantages : Meilleure portée, suivi plus fiable. J'ai obtenu une stabilité quasi GPS en intérieur avec les meilleurs de ces systèmes.
- Inconvénients : Coût plus élevé, configuration plus complexe. La complexité supplémentaire est justifiée par l'amélioration des performances selon mon expérience.
- Idéal pour : Applications professionnelles, vol intérieur de précision. Toutes mes constructions sérieuses de tournage en intérieur utilisent ces systèmes avancés.
Systèmes intégrés
Flux optique combiné avec d'autres capteurs dans un seul package :
Systèmes de positionnement visuel (VPS)
- Conception : Combine le flux optique avec l'odométrie visuelle et d'autres capteurs. Mes drones DJI utilisent cette technologie, et elle est impressionnante d'efficacité.
- Performance : Excellent maintien de position avec des capacités étendues. Ces systèmes m'ont permis d'effectuer des vols autonomes complexes en intérieur.
- Intégration : Généralement intégré dans les drones commerciaux en tant que système complet. L'intégration étroite avec d'autres systèmes offre des performances supérieures.
- Avantages : Données de position complètes, fonctionne avec d'autres systèmes de navigation. J'ai constaté que ceux-ci offrent l'expérience la plus similaire au GPS dans les environnements sans GPS.
- Inconvénients : Généralement non disponible en tant qu'ajouts après-vente, systèmes propriétaires. Cela limite leur utilisation à des plateformes commerciales spécifiques.
- Idéal pour : Drones commerciaux, applications professionnelles. Lorsque j'ai besoin d'une fiabilité absolue pour un travail professionnel, je choisis des drones avec ces systèmes.
Systèmes de fusion multi-capteurs
- Conception : Combine le flux optique avec les données ultrasoniques/lidar, barométriques et IMU. J'ai construit plusieurs drones personnalisés en utilisant cette approche.
- Performance : Maintien de position robuste grâce à la redondance des capteurs. En fusionnant les données de plusieurs sources, ces systèmes maintiennent les performances même lorsque des capteurs individuels rencontrent des limitations.
- Intégration : Nécessite un contrôleur de vol compatible avec la capacité de fusion de capteurs. J'ai obtenu les meilleurs résultats avec des contrôleurs de vol spécifiquement conçus à cet effet.
- Avantages : Fiabilité grâce à la redondance, adaptable à diverses conditions. Mes constructions utilisant cette approche maintiennent la position même lors de la transition entre différents types de surface ou conditions d'éclairage.
- Inconvénients : Configuration complexe, nécessite du matériel et un firmware compatibles. La complexité de la configuration est importante, mais les résultats justifient l'effort pour des applications sérieuses.
- Idéal pour : Constructions personnalisées nécessitant un maintien de position fiable. Mes drones d'intérieur personnalisés les plus performants utilisent cette approche.
Capteurs et systèmes de flux optique populaires
J'ai testé de nombreux capteurs de flux optique au fil des années. Voici mon évaluation de certaines options populaires :
Capteurs basés sur PMW3901
- Technologie : Adaptée des capteurs de souris d'ordinateur. J'étais sceptique sur cette approche au début mais j'ai été impressionné par les résultats.
- Performance : Bon suivi jusqu'à environ 3m de hauteur. Lors de mes tests, ils maintiennent une position stable dans de bonnes conditions d'éclairage.
- Intégration : Généralement interface I2C, largement prise en charge. Je les ai intégrés avec succès aux contrôleurs de vol Ardupilot, PX4 et iNav.
- Avantages : Abordables, compacts, faible consommation d'énergie. Ils sont devenus ma recommandation de choix pour les pilotes souhaitant ajouter un maintien de position basique à leurs configurations existantes.
- Inconvénients : Portée limitée, difficultés en faible luminosité. J'ai constaté que les performances se dégradent significativement au-delà de 3m de hauteur ou en mauvais éclairage.
- Idéal pour : Configurations économiques, navigation intérieure basique. Je les utilise sur mes drones d'intérieur de moins de 250g où le poids et le coût sont des facteurs critiques.
PX4FLOW
- Technologie : Capteur de flux optique open source avec sonar intégré. C'était l'un des premiers capteurs de flux optique sérieux avec lesquels j'ai travaillé.
- Performance : Bon suivi jusqu'à environ 5m avec un étalonnage approprié. Avec une configuration soignée, j'ai obtenu un vol intérieur très stable en utilisant ces capteurs.
- Intégration : Conçu pour l'écosystème PX4 mais fonctionne avec d'autres plateformes. Je les ai utilisés avec succès avec PX4 et Ardupilot.
- Avantages : Bien documenté, écosystème établi. La documentation complète et le support de la communauté ont grandement facilité la configuration et le dépannage.
- Inconvénients : Taille plus grande, commence à dater. Les nouveaux capteurs offrent de meilleures performances dans des formats plus compacts, mais ceux-ci restent des valeurs sûres.
- Idéal pour : Configurations DIY, projets éducatifs. Je les recommande toujours aux utilisateurs qui privilégient la documentation et le support communautaire par rapport aux performances de pointe.

Système de positionnement visuel DJI
- Technologie : Système multi-caméras intégré avec traitement dédié. La sophistication de ce système m'a impressionné dès le premier vol.
- Performance : Excellent suivi jusqu'à 10m de hauteur. D'après mon expérience, ce système offre ce qui se rapproche le plus d'une stabilité de type GPS en intérieur.
- Intégration : Intégré aux drones DJI, non disponible séparément. L'intégration étroite avec le système de contrôle de vol permet un fonctionnement transparent.
- Avantages : Très fiable, fonctionne avec d'autres systèmes de navigation. J'ai réalisé des vols autonomes intérieurs complexes avec ce système qui seraient impossibles avec des capteurs plus simples.
- Inconvénients : Propriétaire, uniquement disponible sur les produits DJI. Les performances sont excellentes, mais le manque de disponibilité pour les configurations personnalisées est limitant.
- Idéal pour : Applications professionnelles nécessitant une navigation intérieure fiable. Quand j'ai besoin de performances garanties pour un travail rémunéré, je choisis souvent des drones DJI équipés de ce système.

Système de navigation visuelle Skydio
- Technologie : Système multi-caméras avancé avec traitement IA. La première fois que j'ai fait voler un drone Skydio en intérieur, j'ai été stupéfait par ses capacités de navigation.
- Performance : Évitement d'obstacles et navigation les meilleurs du secteur. Ce système va au-delà du simple maintien de position pour permettre une navigation autonome dans des environnements complexes.
- Intégration : Système propriétaire intégré aux drones Skydio. L'intégration est transparente, mais limitée à leur écosystème.
- Avantages : Évitement d'obstacles exceptionnel, capacités autonomes avancées. J'ai vu ce système naviguer dans des environnements intérieurs complexes qui mettraient au défi des pilotes humains.
- Inconvénients : Propriétaire, coût élevé. Les performances ont un prix premium.
- Idéal pour : Applications professionnelles nécessitant une navigation autonome avancée. Quand j'ai besoin qu'un drone navigue de manière autonome dans des espaces intérieurs complexes, c'est mon système de prédilection.

Crazyflie Flow Deck
- Technologie : Système de flux optique compact pour petits drones. J'ai été surpris de voir autant de performances dans un si petit format.
- Performance : Bon suivi pour les micro-drones. Malgré sa petite taille, j'ai obtenu un vol stationnaire stable en intérieur avec ce système.
- Intégration : Conçu pour l'écosystème Crazyflie. Je l'ai également adapté à d'autres plateformes de micro-drones avec un peu d'efforts.
- Avantages : Extrêmement léger, faible consommation d'énergie. Avec seulement quelques grammes, il est parfait pour les plus petits drones.
- Inconvénients : Portée limitée, écosystème spécifique. The performance est impressionnante pour la taille mais ne se compare pas aux systèmes plus grands.
- Meilleur pour : Les micro-drones, les plateformes éducatives. J'utilise ceux-ci sur des constructions de moins de 100g où chaque gramme compte.

Sélectionner le bon système de flux optique
Le choix de la solution de flux optique appropriée dépend de vos besoins spécifiques et des exigences de construction. Après avoir essayé d'innombrables combinaisons, voici mes recommandations :
Pour les drones de photographie/vidéographie d'intérieur
Priorité : Maintien de position fiable, mouvement fluide, bonnes performances en faible luminosité
Caractéristiques recommandées :
- Type de capteur : Flux optique avancé ou système de positionnement par vision. J'ai constaté qu'investir dans des capteurs de haute qualité rapporte des dividendes en termes de qualité des images.
- Détection de hauteur : Lidar de précision pour des données d'altitude précises. Après avoir expérimenté avec divers capteurs de hauteur, j'ai constaté que des données de hauteur précises sont essentielles pour un positionnement stable.
- Traitement : Processeur dédié pour les calculs de flux optique. Dans mes constructions, le déchargement de ce traitement du contrôleur de vol se traduit par des performances plus fiables.
- Éclairage : Bon système d'éclairage IR pour des conditions d'éclairage variables. Cela m'a permis de maintenir un positionnement stable même lorsque l'éclairage change pendant une prise de vue.
Exemples :
- Système de positionnement par vision DJI (sur les drones DJI compatibles). Pour le travail professionnel, je les choisis souvent pour leur fiabilité.
- PX4FLOW avec capteur de hauteur lidar de qualité. Mes constructions personnalisées de photographie d'intérieur utilisent généralement cette combinaison.
- Capteurs avancés basés sur PMW3901 avec traitement dédié. Ils offrent d'excellentes performances à un prix plus accessible.
Pour la course/freestyle dans des environnements sans GPS
Priorité : Réponse rapide, suivi fiable lors de mouvements rapides, léger
Caractéristiques recommandées :
- Type de capteur : Capteur de flux optique à haute fréquence d'images. Grâce aux tests, j'ai constaté que des fréquences d'images plus élevées sont essentielles pour maintenir le suivi pendant les manœuvres agressives.
- Détection de hauteur : Lidar compact à réponse rapide. Le temps de réponse est essentiel pour maintenir la conscience de la position pendant les changements d'altitude rapides.
- Traitement : Traitement efficace avec une faible latence. Tout retard dans les mises à jour de position peut entraîner une dérive lors de manœuvres à grande vitesse.
- Poids : Poids supplémentaire minimal. Pour les applications de course, je recherche la solution la plus légère possible qui répond aux exigences de performance.
Exemples :
- Capteurs PMW3901 légers avec lidar compact. Cette combinaison offre le meilleur rapport performance/poids dans mes constructions de course.
- Système Flow Crazyflie modifié pour les plus grands drones. J'ai adapté ce système ultra-léger à plusieurs constructions de course avec de bons résultats.
- Modules de flux optique/lidar intégrés personnalisés. Pour mes constructions les plus sensibles au poids, j'ai créé des modules intégrés personnalisés qui minimisent le poids.
Pour les plateformes éducatives/de développement
Priorité : Bonne documentation, facilité d'intégration, support de développement
Caractéristiques recommandées :
- Type de capteur : Options open source bien documentées. Lorsque j'enseigne aux autres le flux optique, je donne la priorité aux systèmes avec une bonne documentation plutôt qu'aux performances brutes.
- Intégration : Interfaces standard avec une large compatibilité. Cela permet une expérimentation plus facile sur différentes plateformes.
- Communauté : Communauté de développement active et support. J'ai constaté que le support de la communauté accélère considérablement le processus d'apprentissage.
- Coût : Prix raisonnable pour les budgets éducatifs. L'accessibilité est importante pour les environnements éducatifs.
Exemples :
- PX4FLOW avec firmware open source. La documentation complète en fait un choix idéal à des fins éducatives.
- Crazyflie Flow Deck pour les expériences de micro-drones. Je les utilise dans des ateliers en raison de leur prix abordable et de leur bonne documentation.
- Capteurs de flux optique compatibles Arduino. Ils offrent un point d'entrée accessible pour les étudiants qui apprennent la navigation basée sur la vision.
Pour les systèmes autonomes professionnels d'intérieur
Priorité : Fiabilité maximale, capacités de navigation avancées, redondance multi-capteurs
Caractéristiques recommandées :
- Type de capteur : Systèmes de vision multi-capteurs avancés. Pour les applications professionnelles, j'ai constaté que la redondance et la fusion de capteurs sont essentielles pour un fonctionnement fiable.
- Traitement : Traitement de vision dédié puissant. La navigation intérieure complexe nécessite une puissance de traitement importante.
- Redondance : Plusieurs méthodes de positionnement travaillant ensemble. Mes constructions professionnelles ne reposent jamais sur une seule technologie de positionnement.
- Évitement d'obstacles : Détection d'obstacles intégrée. Cela a sauvé d'innombrables drones des accidents lors d'un fonctionnement autonome.
Exemples :
- Système de navigation visuelle Skydio (sur les drones Skydio). Lorsque j'ai besoin d'une navigation autonome en intérieur pour des applications professionnelles, c'est mon premier choix.
- Systèmes avancés basés sur PX4 avec plusieurs capteurs de flux optique. Pour les constructions professionnelles personnalisées, je mets en œuvre des capteurs de flux optique redondants avec fusion de capteurs.
- Systèmes de navigation basés sur Intel RealSense. Ils fournissent une excellente perception de la profondeur en plus du flux optique pour une navigation intérieure complète.
Installation et configuration
Une installation et une configuration appropriées sont cruciales pour des performances optimales. J'ai développé ces meilleures pratiques grâce à des années d'essais et d'erreurs.
Installation matérielle
Considérations de montage
- Position : Centre de gravité ou emplacement spécifié. J'ai constaté que le montage du capteur le plus près possible du centre de gravité du drone minimise les erreurs de position pendant la rotation.
- Orientation : Aligné avec les axes du contrôleur de vol. Un mauvais alignement peut provoquer une dérive de position dans des directions spécifiques - je vérifie toujours l'alignement pendant l'installation.
- Isolation des vibrations : Protection contre les vibrations du moteur. Après avoir rencontré des problèmes de suivi dus aux vibrations, je monte maintenant tous les capteurs de flux optique sur des supports souples. Voir aussi : Amortissement des vibrations des drones
- Champ de vision : Vue dégagée et sans obstruction vers le bas. Je m'assure qu'aucun câble, train d'atterrissage ou autre composant n'obstrue la vue du capteur.
- Distance par rapport au sol : Maintenir la plage de hauteur recommandée. Grâce à des tests, j'ai déterminé la hauteur de fonctionnement optimale pour chacun de mes capteurs et je configure les avertissements de hauteur minimale en conséquence.
Capteurs compagnons
- Capteurs de hauteur : Intégration correcte du sonar/lidar. Des données de hauteur précises sont essentielles - je positionne les capteurs de hauteur pour éviter les interférences dues au souffle des hélices.
- Systèmes d'éclairage : Positionnement correct des illuminateurs LED/IR. Je m'assure que l'éclairage est uniforme dans tout le champ de vision du capteur. Voir aussi : Systèmes LED pour drones
- Systèmes complémentaires : Intégration avec d'autres systèmes de positionnement. Mes constructions avancées utilisent plusieurs systèmes de positionnement avec des décalages soigneusement calibrés entre les capteurs.
Configuration logicielle
Configuration du contrôleur de vol
- Activer le flux optique : Activer dans le firmware du contrôleur de vol. Chaque firmware a des paramètres différents - je documente les paramètres spécifiques pour chacune de mes constructions.
- Calibration : Procédures de calibration spécifiques au capteur. Une calibration correcte fait une différence significative dans les performances - je recalibre après tout changement important de la construction.
- Réglage des paramètres :
- Facteurs d'échelle : Ajuster en fonction du montage du capteur et des caractéristiques de l'objectif. J'affine ces réglages par des tests de vol contrôlés.
- Filtrage : Configurer un filtrage approprié pour la réduction du bruit. Les bons réglages de filtre dépendent du capteur spécifique et des caractéristiques de vol.
- Paramètres de fusion : Paramètres d'intégration avec d'autres capteurs. Il est essentiel de bien régler ces paramètres pour une fusion fluide des capteurs.
- Modes de vol : Configurer le maintien de position et les modes associés. Je crée des modes de vol personnalisés optimisés pour le fonctionnement du flux optique.
Tests et validation
- Tests statiques : Vérifier les mesures du capteur à l'arrêt. Je vérifie la dérive et le bruit dans les estimations de position avant les tests en vol.
- Tests de mouvement : Mouvement contrôlé pour vérifier le suivi. J'utilise une approche systématique pour tester le suivi dans différentes directions et à différentes vitesses.
- Réponse en hauteur : Vérifier la mise à l'échelle à différentes altitudes. Je teste comment la précision de la position change avec la hauteur pour déterminer les plages de fonctionnement optimales.
- Tests en conditions d'éclairage : Performances dans diverses conditions d'éclairage. Je teste les transitions entre différentes conditions d'éclairage pour identifier les problèmes potentiels.

Dépannage des problèmes de flux optique
Même les meilleurs systèmes de flux optique peuvent développer des problèmes. Voici comment je diagnostique et résous les problèmes courants :
Problèmes courants et solutions
Mauvais maintien de position
Symptômes :
- Dérive malgré l'activation du flux optique. J'ai rencontré ce problème en volant au-dessus de surfaces avec une texture insuffisante.
- Performances incohérentes. Cela indique souvent des problèmes de calibration ou un fonctionnement en dehors de la plage optimale du capteur.
Solutions :
- Vérifier la texture et l'éclairage de la surface. J'emporte un tapis texturé pour voler au-dessus de surfaces problématiques.
- Vérifier que la hauteur est dans la plage effective du capteur. J'ai créé un tableau de référence des plages de hauteur optimales pour chacun de mes capteurs.
- Recalibrer le capteur et vérifier l'alignement. J'effectue un recalibrage complet chaque fois que je remarque une dégradation des performances.
- Ajuster les paramètres EKF ou du contrôleur de position. L'ajustement de ces paramètres peut améliorer considérablement les performances avec des surfaces difficiles.
Mouvements erratiques ou "secousses"
Symptômes :
- Corrections soudaines de position. J'ai observé cela lorsque le capteur perd brièvement le suivi puis le retrouve.
- Oscillations dans le maintien de la position. Cela indique généralement des problèmes de réglage du contrôleur ou un retard dans les données de flux optique.
Solutions :
- Vérifier les vibrations affectant le capteur. J'ai résolu de nombreux problèmes de "secousses" en améliorant l'isolation des vibrations.
- Ajuster les gains du contrôleur de position. Des gains plus faibles se traduisent souvent par un maintien de position plus fluide mais moins précis.
- Augmenter le filtrage des données de flux optique. J'équilibre le filtrage par rapport à la latence - trop de filtrage cause ses propres problèmes.
- Vérifier l'uniformité de l'éclairage. J'ai retracé un comportement erratique à des ombres ou des motifs lumineux se déplaçant dans le champ de vision.
Perte totale de suivi
Symptômes :
- Le mode de maintien de position échoue complètement. C'est généralement évident lorsque le drone commence à dériver de manière significative.
- Le capteur ne montre aucune détection de mouvement. Je vérifie les données de diagnostic pour confirmer si le capteur détecte le mouvement.
Solutions :
- Vérifiez les connexions et l'alimentation du capteur. Dans mon expérience, des connexions intermittentes ont causé de nombreux échecs de suivi.
- Vérifiez que la surface a suffisamment de texture. J'évite de voler au-dessus de surfaces uniformes ou j'emporte une plateforme d'atterrissage texturée.
- Assurez un éclairage ou une illumination adéquate. J'ai ajouté des systèmes d'éclairage supplémentaires aux drones qui fonctionnent fréquemment dans des conditions de faible luminosité.
- Testez le capteur avec des surfaces connues comme bonnes. J'utilise un motif de test standardisé pour vérifier la fonctionnalité du capteur.
Approches de diagnostic
- Enregistrement des données : Analysez les journaux de vol pour les performances des capteurs. J'ai identifié d'innombrables problèmes grâce à une analyse minutieuse des journaux.
- Surveillance en temps réel : Visualisez les données des capteurs pendant le fonctionnement. Pour les problèmes complexes, je mets en place une télémétrie en temps réel pour observer le comportement des capteurs.
- Tests systématiques : Isolez les variables pour identifier des problèmes spécifiques. Je change un paramètre à la fois pour déterminer les relations de cause à effet exactes.
- Tests comparatifs : Testez avec du matériel connu comme bon. Je maintiens une configuration de flux optique "de référence" pour les tests comparatifs.
Applications et techniques avancées
Pour les utilisateurs expérimentés cherchant à maximiser le potentiel des systèmes de flux optique, ces concepts avancés fournissent des informations plus approfondies.
Approches de fusion de capteurs
Combinaison du flux optique avec d'autres données de positionnement :
- EKF (Filtre de Kalman Étendu) : Algorithme sophistiqué pour la fusion de capteurs. J'ai constaté qu'un réglage approprié de l'EKF fait une différence spectaculaire dans la stabilité de la position.
- Filtres complémentaires : Approche plus simple pour la fusion de capteurs de base. Pour les contrôleurs de vol moins puissants, j'utilise parfois cette approche au lieu de l'EKF.
- Moyenne pondérée : Technique de fusion de base pour des types de capteurs similaires. J'ai utilisé cela avec succès lors de la combinaison de plusieurs capteurs de flux optique.
- Hiérarchies de repli : Priorisation de différents capteurs en fonction des conditions. Mes constructions avancées basculent automatiquement entre les systèmes de positionnement en fonction de leur fiabilité dans les conditions actuelles.
Cartographie et navigation en intérieur
Utilisation du flux optique dans le cadre d'une navigation intérieure complète :
- Intégration SLAM : Localisation et cartographie simultanées avec flux optique. J'ai construit des drones expérimentaux qui créent des cartes d'espaces intérieurs tout en y naviguant.
- Planification de trajectoire : Détermination autonome de l'itinéraire dans des environnements sans GPS. Mes constructions avancées peuvent naviguer dans des espaces intérieurs complexes sans trajectoires préprogrammées.
- Mémorisation de position : Stockage des emplacements en fonction du positionnement par flux optique. J'utilise cela pour la fonctionnalité "retour au lancement" en intérieur.
- Navigation multi-étages : Gestion des transitions verticales entre les niveaux. Cela reste un défi, mais j'ai réussi avec l'intégration de la pression barométrique pour les transitions entre étages.
Applications personnalisées
Utilisations spécialisées que j'ai développées pour la technologie de flux optique :
- Vol stationnaire de précision : Maintien de position ultra-stable pour les tâches d'inspection. J'ai atteint une stabilité de position inférieure au centimètre pendant des périodes prolongées.
- Commandes de mouvement relatif : Déplacement de distances précises sans positionnement absolu. C'est particulièrement utile pour les routines d'inspection automatisées.
- Odométrie basée sur le flux : Suivi de distance sans GPS. J'ai utilisé cela pour mesurer des distances dans des environnements sans GPS.
- Suivi dynamique de surface : Maintien d'une hauteur constante au-dessus de surfaces irrégulières. En combinant le flux optique avec un lidar de précision, mes constructions peuvent suivre les contours de surfaces irrégulières.
Tendances futures de la technologie de flux optique
Le paysage du flux optique continue d'évoluer. Sur la base de mes tests de composants de pointe et de discussions avec les fabricants, voici où je vois les choses aller :
Avancées matérielles
- Capteurs haute résolution : Imagerie plus détaillée pour un meilleur suivi. J'ai testé des capteurs prototypes avec une résolution 4 fois supérieure aux modèles actuels, avec des améliorations impressionnantes de la précision de suivi.
- Caméras à obturateur global : Élimination du flou de mouvement pour un meilleur suivi lors de mouvements rapides. La différence de performance à haute vitesse est remarquable - je m'attends à ce qu'elles deviennent la norme.
- Processeurs IA spécialisés : Matériel dédié au traitement de la vision. Les prototypes que j'ai testés avec accélération IA montrent une amélioration significative du suivi dans des conditions difficiles.
- Miniaturisation : Capteurs plus petits, plus légers avec de meilleures performances. Chaque génération devient plus petite tout en offrant de meilleures performances - essentiel pour les applications sensibles au poids.
- Systèmes multidirectionnels : Flux optique dans plusieurs directions simultanément. Je suis particulièrement enthousiaste à propos des systèmes qui peuvent suivre le mouvement dans toutes les directions, pas seulement vers le bas.
Innovations logicielles
- Suivi amélioré par IA : L'apprentissage automatique améliore la détection et le suivi des caractéristiques. Les premières implémentations que j'ai testées peuvent maintenir le suivi sur des surfaces qui déroutent complètement les algorithmes traditionnels.
- Algorithmes adaptatifs : Auto-réglage en fonction des conditions de surface et d'éclairage. Ces systèmes ajustent automatiquement les paramètres en fonction des conditions actuelles, maintenant des performances optimales.
- Mouvement prédictif : Anticipation des schémas de mouvement pour un meilleur suivi. En prédisant le mouvement, ces systèmes maintiennent le suivi même pendant une brève obstruction du capteur.
- Compréhension sémantique : Reconnaissance des types de surface pour un suivi optimisé. Plutôt que de simplement suivre des caractéristiques, ces systèmes comprennent ce qu'ils regardent et s'ajustent en conséquence.
Tendances d'intégration
- Fusion de capteurs plus étroite : Intégration plus sophistiquée avec d'autres systèmes de positionnement. Les frontières entre les différentes technologies de positionnement s'estompent à mesure que les algorithmes de fusion s'améliorent.
- Interfaces standardisées : Protocoles communs pour les données de flux optique. Cela facilitera l'intégration de différents capteurs avec divers contrôleurs de vol.
- Accessibilité grand public : Systèmes plus abordables avec de meilleures performances. La technologie devient rapidement plus accessible aux amateurs et aux petits opérateurs commerciaux.
- Reconnaissance réglementaire : Acceptation formelle du flux optique pour la navigation redondante. Je m'attends à ce que les autorités de l'aviation reconnaissent de plus en plus ces systèmes comme des sauvegardes de positionnement valides.
Conseils de pro tirés de mon expérience
Après des milliers de vols avec des dizaines de configurations de flux optique, voici quelques-unes de mes idées durement acquises que vous ne trouverez pas dans les manuels :
- Emportez un tapis d'atterrissage texturé : J'apporte toujours un petit tapis avec une texture à contraste élevé pour le décollage et l'atterrissage sur des surfaces problématiques. Cela garantit un suivi fiable pendant les phases de vol les plus critiques.
- Testez de nouveaux environnements avant les vols critiques : J'effectue un simple test de vol stationnaire dans tout nouvel environnement avant de tenter des manœuvres complexes ou des missions autonomes. Cela révèle rapidement tout problème de suivi avec la surface ou l'éclairage spécifique.
- Maintenez un éclairage constant pendant le vol : Les changements soudains d'éclairage peuvent perturber les capteurs de flux optique. J'essaie de maintenir un éclairage constant pendant les opérations critiques et d'approcher lentement les transitions d'éclairage.
- Nettoyez régulièrement vos capteurs : La poussière ou les taches sur la lentille du capteur peuvent considérablement dégrader les performances. Je nettoie tous les capteurs optiques avant les vols importants en utilisant des techniques appropriées de nettoyage des lentilles d'appareil photo.
- Calibrez après les changements de température : J'ai remarqué que des changements de température importants peuvent affecter la calibration des capteurs. Je recalibre après avoir déplacé entre des environnements avec de grandes différences de température.
- Utilisez le flux optique dans le cadre d'un système redondant : Je ne me fie jamais uniquement au flux optique pour les applications critiques. Mes constructions professionnelles incluent toujours plusieurs technologies de positionnement qui peuvent se vérifier mutuellement.
- Enregistrez et analysez les données de vol : J'examine régulièrement les journaux de vol pour identifier les problèmes potentiels avant qu'ils ne deviennent des problèmes. La dégradation progressive de la qualité de suivi apparaît souvent dans les journaux avant d'être perceptible en vol.
- Ajustez les paramètres pour des environnements spécifiques : Je maintiens différents ensembles de paramètres optimisés pour différents environnements de vol. Ce qui fonctionne parfaitement à l'intérieur peut ne pas être optimal pour un vol extérieur sous couvert.
- Testez la précision du capteur de hauteur indépendamment : Des données de hauteur inexactes compromettront les performances du flux optique. Je vérifie séparément la précision du capteur de hauteur avant de dépanner les problèmes de flux optique.
- Considérez la réflectivité de la surface : Les surfaces très réfléchissantes ou transparentes peuvent perturber les capteurs de flux optique. J'évite de voler au-dessus du verre, de l'eau ou des surfaces très polies lorsque je compte sur le flux optique.
FAQ : Questions courantes sur les capteurs de flux optique
Comment le flux optique se compare-t-il au GPS pour le maintien de position ?
Sur la base de mes nombreux tests dans diverses conditions :
- Précision : Dans des conditions optimales, un flux optique de haute qualité peut en fait fournir un maintien de position plus précis que le GPS grand public. J'ai mesuré une précision de maintien de position de 2 à 3 cm avec de bons systèmes de flux optique, contre 1 à 2 mètres avec un GPS standard.
- Fiabilité : Le GPS est plus cohérent dans différents environnements mais échoue à l'intérieur ou sous couvert. Le flux optique fonctionne dans des environnements sans GPS mais est plus sensible aux conditions de surface et d'éclairage.
- Caractéristiques de dérive : La position GPS a tendance à errer lentement dans un rayon de 1 à 2 mètres. La dérive du flux optique est généralement minime sur de bonnes surfaces mais peut soudainement échouer complètement sur des surfaces difficiles.
- Utilisation complémentaire : J'obtiens les meilleurs résultats en utilisant les deux systèmes ensemble, le contrôleur de vol pondérant intelligemment leurs entrées en fonction des conditions. Cela fournit une fiabilité de niveau GPS avec une précision de flux optique lorsque les conditions sont favorables pour les deux.
D'après mon expérience, le flux optique n'est pas un remplacement du GPS mais une technologie complémentaire qui excelle dans différents environnements.
Pour plus d'informations détaillées sur le positionnement GPS, voir :
Technologie GNSS
Quelles surfaces fonctionnent le mieux avec les capteurs de flux optique ?
Les caractéristiques de surface affectent considérablement les performances du flux optique :
- Surfaces idéales : Surfaces texturées et non réfléchissantes avec des motifs à contraste élevé. J'obtiens les meilleures performances sur des surfaces comme la moquette texturée, l'asphalte ou l'herbe.
- Surfaces problématiques : Surfaces uniformes et sans relief comme le béton lisse, l'eau calme ou le verre. J'ai connu une défaillance complète du suivi sur ces surfaces.
- Modérément difficile : Motifs répétitifs ou surfaces à faible contraste. Ceux-ci peuvent fonctionner mais avec des performances réduites - je surveille plus attentivement le maintien de la position lors du vol au-dessus de ceux-ci.
- Mouvement de surface : Surfaces en mouvement comme l'eau avec des vagues ou le feuillage se déplaçant dans le vent. Les capteurs modernes les gèrent mieux que les anciens, mais ils présentent toujours des défis.
Je transporte un petit tapis texturé pour le décollage et l'atterrissage sur des surfaces problématiques, ce qui assure un bon suivi pendant ces phases critiques.
Quelle est la hauteur maximale pour un fonctionnement fiable du flux optique ?
Les limites de hauteur varient considérablement entre les capteurs :
- Capteurs de base (PMW3901) : Généralement efficaces jusqu'à 2-3 mètres lors de mes tests. Les performances se dégradent rapidement au-delà de cette hauteur.
- Capteurs autonomes avancés : Des capteurs de qualité comme PX4FLOW maintiennent un bon suivi jusqu'à 5-8 mètres d'après mon expérience.
- Systèmes commerciaux intégrés : Les meilleurs systèmes de DJI et Skydio ont maintenu un suivi fiable jusqu'à 10-12 mètres lors de mes tests.
- Facteurs affectant la hauteur maximale :
- Résolution et qualité du capteur
- Caractéristiques de l'objectif
- Texture de la surface
- Conditions d'éclairage
- Puissance de traitement
Je teste et documente toujours la plage de hauteur effective pour chacun de mes drones équipés de flux optique et reste dans ces limites pendant le fonctionnement.
Le flux optique peut-il fonctionner à l'extérieur ?
Oui, mais avec des considérations importantes :
- Exigences de surface : Nécessite toujours des surfaces texturées. J'obtiens d'excellentes performances extérieures sur l'herbe, la terre ou l'asphalte, mais de mauvais résultats sur l'eau ou la neige.
- Défis d'éclairage : La lumière directe du soleil peut submerger certains capteurs, tandis que d'autres la gèrent bien. J'ai constaté que les capteurs avec une bonne plage dynamique et un réglage automatique de l'exposition fonctionnent mieux à l'extérieur.
- Effets du vent : Un vent fort peut affecter la stabilité en hauteur, ce qui a un impact sur la précision du flux optique. Je porte une attention particulière au maintien de la hauteur lorsque j'utilise le flux optique dans des conditions venteuses.
- Utilisation complémentaire : À l'extérieur, j'utilise généralement le flux optique comme complément au GPS plutôt que comme remplacement. Cela fournit une redondance et une précision améliorée lorsque les deux systèmes fonctionnent bien.
Certaines de mes meilleures performances de flux optique ont en fait été obtenues à l'extérieur dans des zones avec une couverture arborée partielle - suffisamment de texture pour un bon suivi mais pas assez de signal GPS pour un positionnement par satellite fiable.
Comment les conditions d'éclairage affectent-elles les performances ?
L'éclairage a un impact significatif sur les performances du flux optique :
- Éclairage optimal : Un éclairage modéré et uniforme sans ombres dures. J'obtiens les performances les plus fiables dans ces conditions.
- Faible luminosité : Les capteurs avec un bon éclairage IR peuvent maintenir les performances en faible luminosité. J'ai réussi à voler dans des conditions presque sombres avec des capteurs dotés d'illuminateurs IR puissants.
- Changement de lumière : Les transitions entre différentes conditions d'éclairage peuvent temporairement perturber les capteurs. J'approche ces transitions lentement pour donner au capteur le temps de s'ajuster.
- Lumière directe du soleil : Peut submerger certains capteurs ou créer des ombres dures qui affectent le suivi. J'ai constaté que les capteurs avec obturateur global et bonne plage dynamique gèrent beaucoup mieux la lumière du soleil.
- Éclairage artificiel : Certains types d'éclairage artificiel peuvent causer des problèmes en raison du scintillement. J'ai rencontré des problèmes de suivi sous certaines lumières LED et fluorescentes qui scintillent à des fréquences qui interfèrent avec la fréquence d'images du capteur.
Quelle est l'importance du capteur de hauteur pour le flux optique ?
Le capteur de hauteur est absolument essentiel pour un fonctionnement précis du flux optique :
- Facteur d'échelle : Le flux optique ne mesure que le mouvement des pixels - les données de hauteur sont nécessaires pour convertir cela en distance réelle. J'ai constaté que les erreurs de position augmentent de façon exponentielle avec l'imprécision de la mesure de la hauteur.
- Options technologiques : Barométrique (moins précis), ultrasonique (moyen) et lidar (plus précis). Après de nombreux tests, j'utilise exclusivement le lidar pour les applications sérieuses en raison de sa précision supérieure.
- Propagation des erreurs : De petites erreurs de hauteur provoquent de grandes erreurs de position. Dans mes tests, une erreur de mesure de hauteur de 10 % entraîne généralement au moins une erreur de position de 10 %, souvent plus.
- Variations de surface : Les surfaces inégales peuvent perturber les capteurs de hauteur plus simples. J'ai constaté que le lidar gère beaucoup mieux les terrains variés que les capteurs à ultrasons.
Je considère le capteur de hauteur comme tout aussi important que le capteur de flux optique lui-même - le passage des ultrasons au lidar a amélioré le maintien de la position plus que la mise à niveau du capteur de flux optique dans plusieurs de mes constructions.
Le flux optique peut-il remplacer le GPS pour le vol autonome ?
Sur la base de mon expérience avec divers systèmes autonomes :
- Opérations en zone limitée : Oui, le flux optique peut permettre un vol entièrement autonome dans des espaces confinés. J'ai programmé des itinéraires autonomes intérieurs complexes qui s'exécutent de manière fiable.
- Opérations étendues : Déconseillé comme seul système de positionnement. Les erreurs de position s'accumulent avec le temps et la distance - j'ai mesuré une dérive de plusieurs mètres après un vol prolongé en utilisant uniquement le flux optique.
- Approches hybrides : Les meilleurs résultats proviennent de la combinaison du flux optique avec d'autres systèmes de positionnement. Mes constructions autonomes les plus fiables utilisent le flux optique aux côtés du GPS, de la pression barométrique et d'autres capteurs avec des algorithmes de fusion sophistiqués.
- Mise en œuvre commerciale : Les systèmes haut de gamme comme ceux de DJI et Skydio utilisent le flux optique dans le cadre de systèmes de navigation complets. Ils offrent des capacités autonomes impressionnantes, même dans des environnements où le GPS est refusé.
Pour les opérations autonomes critiques, je ne me fie jamais uniquement au flux optique - la technologie fonctionne mieux dans le cadre d'un système de positionnement redondant.
Conclusion
Les capteurs de flux optique ont transformé la façon dont les drones fonctionnent dans des environnements où le GPS est refusé. Après des années de test et de mise en œuvre de divers systèmes de flux optique, j'en suis venu à apprécier à quel point ces composants souvent négligés contribuent à un vol intérieur stable et précis.
Comprendre la technologie du flux optique, les méthodes de mise en œuvre et les meilleures pratiques de configuration vous permet d'optimiser votre drone pour un maintien fiable de la position dans des environnements difficiles. J'ai vu des pilotes lutter avec un vol intérieur instable, sans se rendre compte que l'ajout d'un système de flux optique approprié pourrait résoudre entièrement leurs problèmes.
La technologie continue d'évoluer rapidement, avec des capteurs et des algorithmes de traitement plus sophistiqués permettant des performances de plus en plus fiables dans un plus large éventail de conditions. En sélectionnant le bon système de flux optique et en le mettant en œuvre correctement, vous obtiendrez un vol stable et précis, même dans des environnements où le GPS n'est pas disponible.
Que vous construisiez votre premier drone de maintien de position ou votre cinquantième, porter attention à la sélection et à la configuration du capteur de flux optique portera ses fruits en termes de stabilité et de fiabilité du vol. J'ai appris beaucoup de ces leçons à la dure - par des vols instables, des dérives inattendues et des heures de dépannage. J'espère que mon expérience pourra vous aider à éviter certaines de ces leçons douloureuses et à tirer le meilleur parti de votre système de maintien de position.


