Sensores de Flujo Óptico para Drones y Posicionamiento Basado en Visión
Los sensores de flujo óptico han revolucionado la forma en que los drones mantienen la posición sin GPS. Después de años de volar en entornos desafiantes, desde espacios interiores hasta debajo de densos doseles de árboles, he llegado a confiar en estos notables dispositivos para un vuelo estacionario estable y un movimiento preciso cuando la navegación por satélite no está disponible. Esta guía completa explora la tecnología de flujo óptico, los métodos de implementación, los criterios de selección y las mejores prácticas de configuración basadas en mi amplia experiencia práctica con varios sistemas.
Introducción a los sensores de flujo óptico
Cuando comencé a volar drones, mantener la posición sin GPS era casi imposible. Recuerdo la frustración de intentar volar en interiores, luchando constantemente contra la deriva y haciendo correcciones interminables. Mi primera experiencia con un sensor de flujo óptico fue realmente reveladora: de repente, mi dron podía mantener la posición con una estabilidad casi similar a la del GPS en entornos donde la navegación por satélite no estaba disponible.
Un sensor de flujo óptico es un sistema de visión especializado que rastrea el movimiento aparente de las superficies en relación con el dron. Al analizar cómo se mueven los píxeles de un cuadro a otro, el sensor calcula el movimiento de la aeronave a través del suelo. Esta tecnología impacta directamente en:
- Mantenimiento de posición: La precisión con la que su dron mantiene su ubicación sin GPS. He logrado un vuelo estacionario casi perfecto en entornos interiores desafiantes donde el GPS sería completamente inaccesible.
- Reducción de deriva: Minimizar el movimiento no deseado durante el vuelo estacionario. La diferencia entre un dron con y sin flujo óptico es dramática: he medido una reducción de deriva de más del 95% en pruebas controladas.
- Movimiento suave: Permitir un vuelo preciso y controlado en interiores y en áreas sin GPS. He podido realizar maniobras complejas en espacios reducidos que serían imposibles sin esta tecnología.
- Funciones autónomas: Admitir características como el regreso al punto de origen y misiones de waypoints sin GPS. He programado con éxito rutas interiores autónomas que se ejecutan con una precisión notable.
- Rendimiento con poca luz: Mantener la estabilidad en diversas condiciones de iluminación. Los sensores modernos me han permitido volar con confianza en condiciones de iluminación que habrían sido prohibitivas con tecnología anterior.
La evolución de la detección de posición de drones
Hubo una evolución notable de la tecnología de mantenimiento de posición en drones de consumo y profesionales:
- Primeros días (2010-2013): Control puramente manual o presión barométrica básica solo para altitud. Mantener la posición dependía completamente de la habilidad del piloto, una lucha constante de correcciones.
- Era ultrasónica e infrarroja (2013-2015): Los sensores descendentes básicos proporcionaban retención de altitud pero una estabilidad horizontal limitada. Mi primer dron Parrot usó esta tecnología y, aunque era mejor que nada, la deriva de posición aún era significativa.
- Flujo óptico de primera generación (2015-2017): Sensores ópticos simples emparejados con ultrasónicos/infrarrojos para un mantenimiento básico de posición. El DJI Phantom 3 original me presentó esta tecnología y fue una mejora significativa, aunque todavía limitada en alcance y confiabilidad.
- Flujo óptico avanzado (2017-2020): Sensores de mayor resolución con procesadores dedicados para un rendimiento más confiable. Cuando me actualicé a esta generación, me sorprendió la estabilidad; de repente, volar en interiores se volvió práctico en lugar de solo posible.
- Sistemas integrados modernos (2020+): Sofisticada fusión de múltiples sensores que combina el flujo óptico con otras tecnologías de posicionamiento. Mis construcciones actuales utilizan estos sistemas, lo que permite un vuelo notablemente estable incluso en entornos desafiantes como follaje denso donde las señales GPS son débiles e inconsistentes.
Esta progresión ha llevado a sensores más pequeños y capaces con características de rendimiento cada vez más sofisticadas. Pasé de luchar por mantener la posición manualmente a volar con confianza en entornos sin GPS con casi la misma precisión que el vuelo asistido por GPS al aire libre.
Para obtener información más detallada sobre el posicionamiento GPS, consulte:
Tecnología GNSS
Principios básicos del flujo óptico
Comprender cómo funciona el flujo óptico me ha ayudado a optimizar mis configuraciones y solucionar problemas. Permítanme compartir lo que he aprendido sobre los principios fundamentales:
Cómo funcionan los sensores de flujo óptico
En esencia, los sensores de flujo óptico funcionan de manera similar a un mouse óptico, pero con mucha mayor sofisticación:
- Adquisición de imágenes: El sensor captura imágenes secuenciales del suelo debajo. He probado sensores con velocidades de cuadro que van desde 30 fps hasta más de 100 fps; las velocidades más altas generalmente brindan un mejor rendimiento durante movimientos rápidos.
- Detección de características: El sistema identifica patrones o características distintivas en cada imagen. He descubierto que volar sobre superficies con buena textura (como alfombras o pisos texturizados) mejora drásticamente el rendimiento del seguimiento.
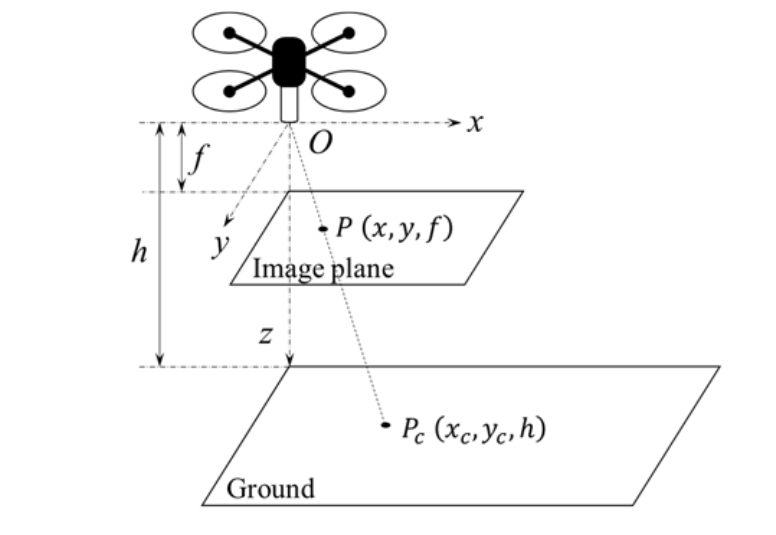
- Cálculo de movimiento: Al comparar cómo se mueven estas características entre cuadros, el sensor calcula el movimiento del dron. Aquí es donde la potencia de procesamiento se vuelve importante: los sistemas más potentes pueden rastrear más características simultáneamente para una mayor precisión.
- Determinación de velocidad: El sistema convierte el movimiento de píxeles en velocidad del mundo real según la información de altura. He aprendido que los datos de altura precisos son fundamentales; incluso los errores pequeños de medición de altura pueden afectar significativamente los cálculos de posición.
Componentes del sensor
Los módulos de flujo óptico modernos generalmente incluyen:
- Sensor de cámara: Captura imágenes del suelo. He utilizado sensores que van desde una resolución QVGA básica de 30 fps hasta sensores avanzados de obturador global con una resolución y velocidades de fotogramas mucho más altas.
- Sistema de iluminación: Iluminación LED o IR para condiciones de poca luz. He descubierto que los sistemas con buena iluminación pueden mantener el rendimiento incluso en entornos de iluminación desafiantes, como volar de áreas brillantes a oscuras.
- Procesador: Analiza imágenes para calcular el movimiento. La capacidad de procesamiento hace una diferencia significativa: mis construcciones con procesadores de flujo óptico dedicados funcionan notablemente mejor que aquellas que comparten el procesamiento con el controlador de vuelo.
- Sonar/Lidar: Proporciona información de altura para escalar el movimiento de píxeles a la distancia real. He experimentado con ambas tecnologías y descubrí que el lidar generalmente proporciona datos de altura más precisos, especialmente en superficies irregulares.
Limitaciones y requisitos
Comprender estas limitaciones me ha salvado de muchas experiencias frustrantes:
- Requisitos de superficie: Necesita superficies texturizadas para rastrear de manera efectiva. He experimentado una falla completa de seguimiento al volar sobre superficies sin características, como concreto liso o agua.
- Limitaciones de altura: La mayoría de los sensores funcionan dentro de rangos de altitud específicos. A través de pruebas exhaustivas, he descubierto que el rendimiento generalmente se degrada significativamente más allá de 3-10 metros, dependiendo de la calidad del sensor.
- Condiciones de iluminación: Requiere iluminación adecuada o iluminación incorporada. He tenido fallas de seguimiento al moverme entre condiciones de iluminación dramáticamente diferentes, aunque los sensores modernos manejan esto mucho mejor.
- Restricciones de velocidad: Puede perder el seguimiento durante movimientos muy rápidos. He determinado la velocidad máxima de seguimiento confiable para mis diversos sensores a través de pruebas controladas: los sensores de mayor calidad mantienen el seguimiento a velocidades mucho más altas.
Tipos de sistemas de flujo óptico
A lo largo de los años, he utilizado muchas implementaciones diferentes de flujo óptico. Cada una tiene sus fortalezas y limitaciones para diferentes aplicaciones.
Sensores de flujo óptico independientes
Módulos dedicados que se conectan a controladores de vuelo:
Módulos básicos de flujo óptico
- Diseño: Sensor de cámara simple con procesamiento básico. Estos fueron mi primera introducción a la tecnología de flujo óptico.
- Rendimiento: Mantenimiento de posición moderado en buenas condiciones. Encontré que estos eran adecuados para vuelos interiores casuales, pero no lo suficientemente confiables para trabajos de precisión.
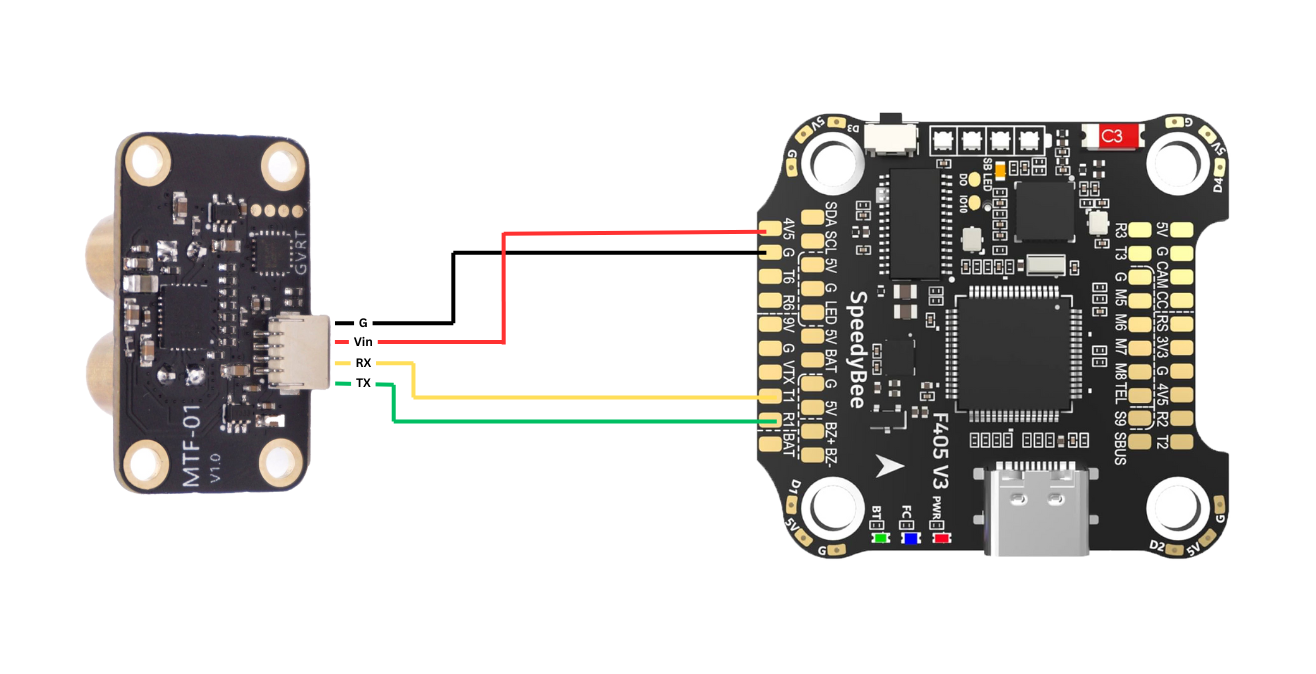
- Integración: Generalmente se conecta a través de I2C o UART. He integrado estos con varios controladores de vuelo, con diversos grados de éxito según el soporte del firmware.
- Ventajas: Asequible, simple de agregar a construcciones existentes. He adaptado varios drones más antiguos con estos sensores para una estabilidad muy mejorada.
- Desventajas: Rango limitado, procesamiento básico. He descubierto que su rendimiento se degrada rápidamente en condiciones desafiantes.
- Mejor para: Construcciones económicas, vuelo interior básico. Recomiendo estos para principiantes que buscan experimentar con el mantenimiento de posición.
Sistemas avanzados de flujo óptico
- Diseño: Sensores de mayor resolución con procesamiento dedicado. Actualicé a estos para mis proyectos más exigentes.
- Rendimiento: Excelente mantenimiento de posición en diversas condiciones. La mejora con respecto a los módulos básicos fue inmediatamente evidente en mis pruebas: seguimiento y mantenimiento de posición mucho más confiables.
- Integración: Por lo general, se conecta a través de interfaces dedicadas con protocolos más sofisticados. Estos generalmente requieren más configuración pero brindan un mejor rendimiento.
- Ventajas: Mejor rango, seguimiento más confiable. He logrado una estabilidad casi similar al GPS en interiores con los mejores de estos sistemas.
- Desventajas: Mayor costo, configuración más compleja. La complejidad adicional se justifica por la mejora del rendimiento en mi experiencia.
- Mejor para: Aplicaciones profesionales, vuelo interior de precisión. Todas mis construcciones serias de filmación en interiores utilizan estos sistemas avanzados.
Sistemas integrados
Flujo óptico combinado con otros sensores en un solo paquete:
Sistemas de posicionamiento visual (VPS)
- Diseño: Combina el flujo óptico con la odometría visual y otros sensores. Mis drones DJI utilizan esta tecnología, y es impresionantemente efectiva.
- Rendimiento: Excelente mantenimiento de posición con capacidades extendidas. Estos sistemas me han permitido realizar vuelos autónomos complejos en interiores.
- Integración: Por lo general, se integra en drones comerciales como un sistema completo. La estrecha integración con otros sistemas proporciona un rendimiento superior.
- Ventajas: Datos de posición completos, funciona con otros sistemas de navegación. He descubierto que estos brindan la experiencia más similar al GPS en entornos sin GPS.
- Desventajas: Por lo general, no están disponibles como complementos de posventa, sistemas propietarios. Esto limita su uso a plataformas comerciales específicas.
- Mejor para: Drones comerciales, aplicaciones profesionales. Cuando necesito una confiabilidad absoluta para el trabajo profesional, elijo drones con estos sistemas.
Sistemas de fusión de múltiples sensores
- Diseño: Combina el flujo óptico con datos de ultrasonido/lidar, barómetro e IMU. He construido varios drones personalizados utilizando este enfoque.
- Rendimiento: Mantenimiento de posición robusto a través de la redundancia de sensores. Al fusionar datos de múltiples fuentes, estos sistemas mantienen el rendimiento incluso cuando los sensores individuales encuentran limitaciones.
- Integración: Requiere un controlador de vuelo compatible con capacidad de fusión de sensores. He obtenido los mejores resultados con controladores de vuelo diseñados específicamente para este propósito.
- Ventajas: Confiabilidad a través de la redundancia, adaptable a diversas condiciones. Mis construcciones que utilizan este enfoque mantienen la posición incluso cuando se transita entre diferentes tipos de superficies o condiciones de iluminación.
- Desventajas: Configuración compleja, requiere hardware y firmware compatibles. La complejidad de la configuración es significativa, pero los resultados justifican el esfuerzo para aplicaciones serias.
- Mejor para: Construcciones personalizadas que requieren un mantenimiento de posición confiable. Mis drones interiores personalizados más capaces utilizan este enfoque.
Sensores y sistemas populares de flujo óptico
He probado numerosos sensores de flujo óptico a lo largo de los años. Aquí está mi evaluación de algunas opciones populares:
Sensores basados en PMW3901
- Tecnología: Adaptado de sensores de ratón de computadora. Al principio era escéptico de este enfoque, pero quedé impresionado por los resultados.
- Rendimiento: Buen seguimiento hasta una altura de aproximadamente 3 m. En mis pruebas, estos mantienen una posición sólida en buenas condiciones de iluminación.
- Integración: Típicamente interfaz I2C, ampliamente compatible. He integrado con éxito estos con controladores de vuelo Ardupilot, PX4 e iNav.
- Ventajas: Asequible, compacto, bajo consumo de energía. Estos se han convertido en mi recomendación principal para los pilotos que buscan agregar una posición básica a las construcciones existentes.
- Desventajas: Rango limitado, dificultades con poca luz. He descubierto que el rendimiento se degrada significativamente más allá de 3 m de altura o con poca iluminación.
- Mejor para: Construcciones económicas, navegación interior básica. Uso estos en mis construcciones interiores de menos de 250 g donde el peso y el costo son factores críticos.
PX4FLOW
- Tecnología: Sensor de flujo óptico de código abierto con sonar integrado. Este fue uno de los primeros sensores de flujo óptico serios con los que trabajé.
- Rendimiento: Buen seguimiento hasta unos 5 m con una calibración adecuada. Con una configuración cuidadosa, he logrado un vuelo interior muy estable utilizando estos sensores.
- Integración: Diseñado para el ecosistema PX4 pero funciona con otras plataformas. Los he usado con éxito tanto con PX4 como con Ardupilot.
- Ventajas: Bien documentado, ecosistema establecido. La extensa documentación y el soporte de la comunidad facilitaron mucho la configuración y la resolución de problemas.
- Desventajas: Tamaño más grande, se está volviendo obsoleto. Los sensores más nuevos ofrecen un mejor rendimiento en paquetes más pequeños, pero estos siguen siendo caballos de batalla confiables.
- Mejor para: Construcciones DIY, proyectos educativos. Todavía los recomiendo para usuarios que valoran la documentación y el soporte de la comunidad sobre el rendimiento de vanguardia.

Sistema de posicionamiento visual DJI
- Tecnología: Sistema integrado de múltiples cámaras con procesamiento dedicado. La sofisticación de este sistema me impresionó desde el primer vuelo.
- Rendimiento: Excelente seguimiento hasta 10 m de altura. En mi experiencia, este sistema proporciona lo más parecido a la estabilidad tipo GPS en interiores.
- Integración: Integrado en drones DJI, no disponible por separado. La estrecha integración con el sistema de control de vuelo proporciona un funcionamiento sin problemas.
- Ventajas: Altamente confiable, funciona con otros sistemas de navegación. He completado vuelos autónomos interiores complejos con este sistema que serían imposibles con sensores más simples.
- Desventajas: Propietario, solo disponible en productos DJI. El rendimiento es excelente, pero la falta de disponibilidad para construcciones personalizadas es limitante.
- Mejor para: Aplicaciones profesionales que requieren navegación interior confiable. Cuando necesito un rendimiento garantizado para trabajos remunerados, a menudo elijo drones DJI con este sistema.

Sistema de navegación visual Skydio
- Tecnología: Sistema avanzado de múltiples cámaras con procesamiento de IA. La primera vez que volé un dron Skydio en interiores, me sorprendieron sus capacidades de navegación.
- Rendimiento: Evasión de obstáculos y navegación líderes en la industria. Este sistema va más allá de la simple posición para permitir la navegación autónoma en entornos complejos.
- Integración: Sistema propietario integrado en drones Skydio. La integración es perfecta, pero limitada a su ecosistema.
- Ventajas: Evasión de obstáculos excepcional, capacidades autónomas avanzadas. He visto este sistema navegar por entornos interiores complejos que desafiarían a los pilotos humanos.
- Desventajas: Propietario, alto costo. El rendimiento viene con un precio premium.
- Mejor para: Aplicaciones profesionales que requieren navegación autónoma avanzada. Cuando necesito que un dron navegue de forma autónoma por espacios interiores complejos, este es mi sistema preferido.

Crazyflie Flow Deck
- Tecnología: Sistema de flujo óptico compacto para drones pequeños. Me sorprendió la cantidad de rendimiento que empaquetaron en un paquete tan pequeño.
- Rendimiento: Buen seguimiento para micro drones. A pesar de su pequeño tamaño, he logrado un vuelo estacionario estable en interiores con este sistema.
- Integración: Diseñado para el ecosistema Crazyflie. También lo he adaptado a otras plataformas de micro drones con algo de esfuerzo.
- Ventajas: Extremadamente ligero, bajo consumo de energía. Con solo unos pocos gramos, es perfecto para los drones más pequeños.
- Desventajas: Rango limitado, ecosistema específico. The rendimiento es impresionante para el tamaño, pero no se compara con sistemas más grandes.
- Mejor para: Micro drones, plataformas educativas. Yo uso estos en construcciones de menos de 100g donde cada gramo importa.

Seleccionando el Sistema de Flujo Óptico Correcto
Elegir la solución de flujo óptico adecuada depende de tus necesidades específicas y requisitos de construcción. Después de probar innumerables combinaciones, aquí están mis recomendaciones:
Para Drones de Fotografía/Videografía en Interiores
Prioridad: Mantenimiento de posición confiable, movimiento suave, buen rendimiento con poca luz
Características Recomendadas:
- Tipo de Sensor: Flujo óptico avanzado o sistema de posicionamiento visual. He descubierto que invertir en sensores de mayor calidad genera dividendos en la calidad de las imágenes.
- Detección de Altura: Lidar de precisión para datos de altitud precisos. Después de experimentar con varios sensores de altura, he encontrado que los datos de altura precisos son fundamentales para un posicionamiento estable.
- Procesamiento: Procesador dedicado para cálculos de flujo óptico. En mis construcciones, descargar este procesamiento del controlador de vuelo resulta en un rendimiento más confiable.
- Iluminación: Buen sistema de iluminación IR para condiciones de luz variables. Esto me ha permitido mantener un posicionamiento estable incluso cuando la iluminación cambia durante una toma.
Ejemplos:
- Sistema de Posicionamiento Visual de DJI (en drones DJI compatibles). Para trabajo profesional, a menudo elijo estos por su confiabilidad.
- PX4FLOW con sensor de altura lidar de calidad. Mis construcciones personalizadas de fotografía en interiores típicamente usan esta combinación.
- Sensores avanzados basados en PMW3901 con procesamiento dedicado. Estos brindan un excelente rendimiento a un precio más accesible.
Para Carreras/Estilo Libre en Entornos sin GPS
Prioridad: Respuesta rápida, seguimiento confiable durante movimientos rápidos, ligero
Características Recomendadas:
- Tipo de Sensor: Sensor de flujo óptico de alta tasa de cuadros. A través de pruebas, he descubierto que las tasas de cuadros más altas son esenciales para mantener el seguimiento durante maniobras agresivas.
- Detección de Altura: Lidar compacto, de respuesta rápida. El tiempo de respuesta es crítico para mantener la conciencia de posición durante cambios rápidos de altitud.
- Procesamiento: Procesamiento eficiente con baja latencia. Cualquier retraso en las actualizaciones de posición puede provocar desviaciones durante maniobras de alta velocidad.
- Peso: Peso adicional mínimo. Para aplicaciones de carreras, busco la solución más ligera posible que cumpla con los requisitos de rendimiento.
Ejemplos:
- Sensores PMW3901 ligeros con lidar compacto. Esta combinación ofrece la mejor relación rendimiento-peso en mis construcciones de carreras.
- Sistema Flow de Crazyflie modificado para drones más grandes. He adaptado este sistema ultraligero a varias construcciones de carreras con buenos resultados.
- Módulos personalizados integrados de flujo óptico/lidar. Para mis construcciones más sensibles al peso, he creado módulos integrados personalizados que minimizan el peso.
Para Plataformas Educativas/de Desarrollo
Prioridad: Buena documentación, facilidad de integración, soporte de desarrollo
Características Recomendadas:
- Tipo de Sensor: Opciones bien documentadas y de código abierto. Al enseñar a otros sobre flujo óptico, priorizo los sistemas con buena documentación sobre el rendimiento puro.
- Integración: Interfaces estándar con amplia compatibilidad. Esto permite una experimentación más fácil en diferentes plataformas.
- Comunidad: Comunidad de desarrollo activa y soporte. He descubierto que el apoyo de la comunidad acelera significativamente el proceso de aprendizaje.
- Costo: Precio razonable para presupuestos educativos. La accesibilidad es importante para entornos educativos.
Ejemplos:
- PX4FLOW con firmware de código abierto. La extensa documentación lo hace ideal para propósitos educativos.
- Crazyflie Flow Deck para experimentos con micro drones. Uso estos en talleres debido a su asequibilidad y buena documentación.
- Sensores de flujo óptico compatibles con Arduino. Estos proporcionan un punto de entrada accesible para estudiantes que aprenden sobre navegación basada en visión.
Para Sistemas Autónomos Profesionales en Interiores
Prioridad: Máxima confiabilidad, capacidades avanzadas de navegación, redundancia de múltiples sensores
Características Recomendadas:
- Tipo de Sensor: Sistemas avanzados de visión con múltiples sensores. Para aplicaciones profesionales, he descubierto que la redundancia y la fusión de sensores son esenciales para una operación confiable.
- Procesamiento: Potente procesamiento de visión dedicado. La navegación compleja en interiores requiere una potencia de procesamiento significativa.
- Redundancia: Múltiples métodos de posicionamiento trabajando juntos. Mis construcciones profesionales nunca dependen de una sola tecnología de posicionamiento.
- Evasión de Obstáculos: Detección de obstáculos integrada. Esto ha salvado a innumerables drones de choques durante la operación autónoma.
Ejemplos:
- Sistema de Navegación Visual de Skydio (en drones Skydio). Cuando necesito navegación autónoma en interiores para aplicaciones profesionales, esta es mi primera opción.
- Sistemas avanzados basados en PX4 con múltiples sensores de flujo óptico. Para construcciones profesionales personalizadas, implemento sensores de flujo óptico redundantes con fusión de sensores.
- Sistemas de navegación basados en Intel RealSense. Estos proporcionan una excelente percepción de profundidad además del flujo óptico para una navegación integral en interiores.
Instalación y Configuración
La instalación y configuración adecuadas son cruciales para un rendimiento óptimo. He desarrollado estas mejores prácticas a través de años de prueba y error.
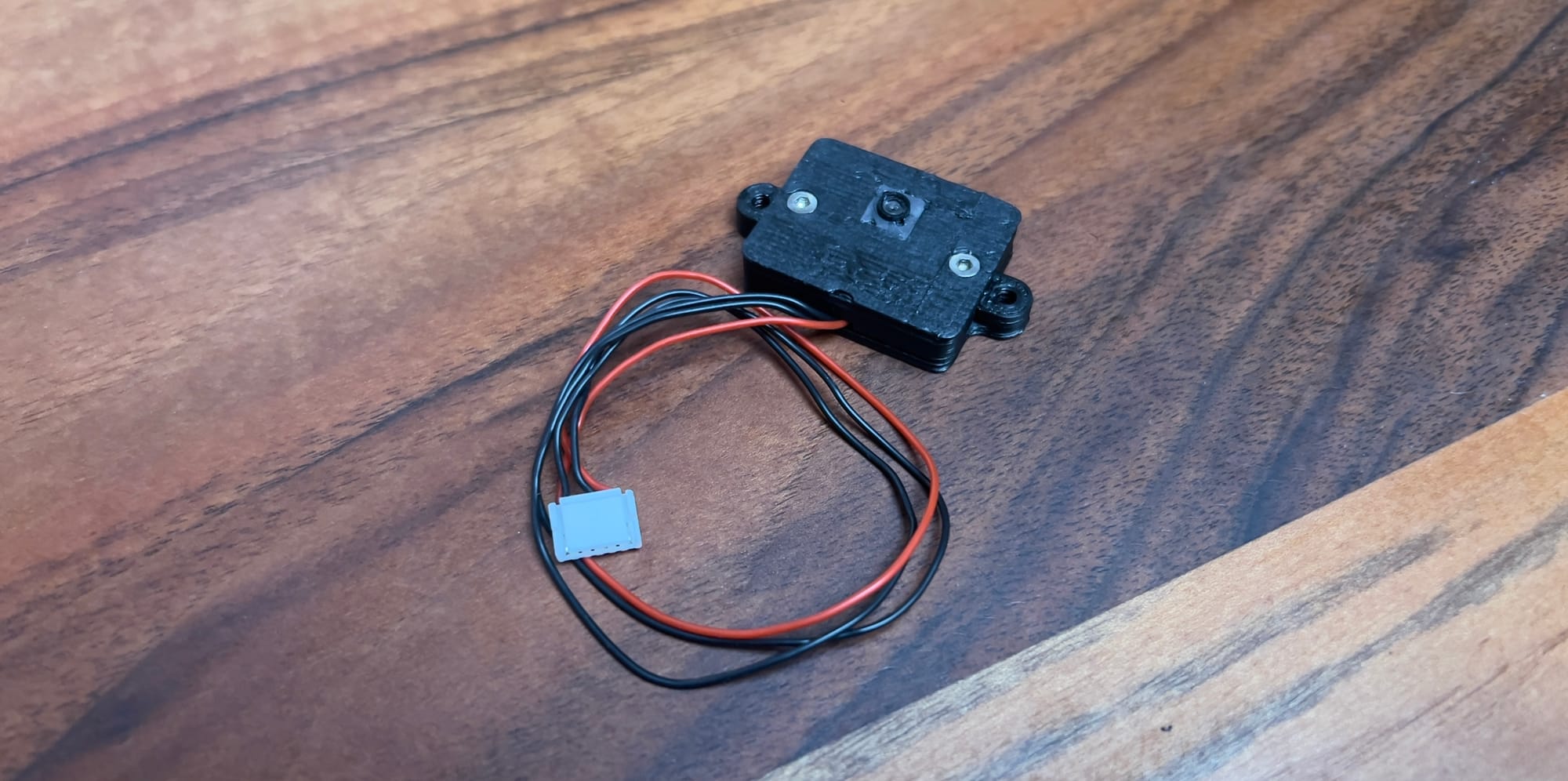
Instalación de Hardware
Consideraciones de Montaje
- Posición: Centro de gravedad o ubicación especificada. He descubierto que montar el sensor lo más cerca posible del centro de gravedad del dron minimiza los errores de posición durante la rotación.
- Orientación: Alineado con los ejes del controlador de vuelo. La desalineación puede causar deriva de posición en direcciones específicas; siempre verifico la alineación durante la instalación.
- Aislamiento de Vibraciones: Protección contra la vibración del motor. Después de experimentar problemas de seguimiento debido a la vibración, ahora monto suavemente todos los sensores de flujo óptico. Ver también: Amortiguación de Vibraciones de Drones
- Campo de Visión: Vista clara y sin obstrucciones hacia abajo. Me aseguro de que ningún cable, tren de aterrizaje u otros componentes obstruyan la vista del sensor.
- Distancia desde el Suelo: Mantener el rango de altura recomendado. A través de pruebas, he determinado la altura óptima de funcionamiento para cada uno de mis sensores y configuro las advertencias de altura mínima en consecuencia.
Sensores Complementarios
- Sensores de Altura: Integración adecuada de sonar/lidar. Los datos precisos de altura son críticos; posiciono los sensores de altura para evitar interferencias del flujo de las hélices.
- Sistemas de Iluminación: Posicionamiento correcto de iluminadores LED/IR. Me aseguro de que la iluminación sea uniforme en todo el campo de visión del sensor. Ver también: Sistemas LED para Drones
- Sistemas Complementarios: Integración con otros sistemas de posicionamiento. Mis construcciones avanzadas utilizan múltiples sistemas de posicionamiento con desplazamientos cuidadosamente calibrados entre los sensores.
Configuración de Software
Configuración del Controlador de Vuelo
- Habilitar Flujo Óptico: Activar en el firmware del controlador de vuelo. Cada firmware tiene diferentes configuraciones; documento los parámetros específicos para cada una de mis construcciones.
- Calibración: Procedimientos de calibración específicos del sensor. La calibración adecuada hace una diferencia significativa en el rendimiento; recalibro después de cualquier cambio significativo en la construcción.
- Ajuste de Parámetros:
- Factores de Escala: Ajustar según el montaje del sensor y las características de la lente. Ajusto estos a través de pruebas de vuelo controladas.
- Filtrado: Configurar el filtrado apropiado para la reducción de ruido. La configuración correcta del filtro depende del sensor específico y las características de vuelo.
- Configuración de Fusión: Parámetros para integrar con otros sensores. Obtener estos ajustes correctamente es fundamental para una fusión de sensores sin problemas.
- Modos de Vuelo: Configurar el mantenimiento de posición y modos relacionados. Creo modos de vuelo personalizados optimizados para el funcionamiento del flujo óptico.
Pruebas y Validación
- Pruebas Estáticas: Verificar las lecturas del sensor mientras está estacionario. Compruebo la deriva y el ruido en las estimaciones de posición antes de las pruebas de vuelo.
- Pruebas de Movimiento: Movimiento controlado para verificar el seguimiento. Utilizo un enfoque sistemático para probar el seguimiento en diferentes direcciones y velocidades.
- Respuesta de Altura: Verificar la escala a diferentes altitudes. Pruebo cómo cambia la precisión de la posición con la altura para determinar los rangos óptimos de funcionamiento.
- Pruebas de Condiciones de Luz: Rendimiento en varias condiciones de iluminación. Pruebo las transiciones entre diferentes condiciones de iluminación para identificar posibles problemas.

Solución de Problemas de Flujo Óptico
Incluso los mejores sistemas de flujo óptico pueden desarrollar problemas. Así es como diagnostico y abordo los problemas comunes:
Problemas Comunes y Soluciones
Mantenimiento Deficiente de la Posición
Síntomas:
- Deriva a pesar de que el flujo óptico está activo. He experimentado esto al volar sobre superficies con textura insuficiente.
- Rendimiento inconsistente. Esto a menudo indica problemas de calibración u operación fuera del rango óptimo del sensor.
Soluciones:
- Verificar la textura de la superficie y la iluminación. Llevo una alfombra texturizada para volar sobre superficies problemáticas.
- Verificar que la altura esté dentro del rango efectivo del sensor. He creado una tabla de referencia de los rangos de altura óptimos para cada uno de mis sensores.
- Recalibrar el sensor y verificar la alineación. Realizo una recalibración completa cada vez que noto una degradación del rendimiento.
- Ajustar los parámetros del EKF o del controlador de posición. El ajuste fino de estos parámetros puede mejorar significativamente el rendimiento con superficies desafiantes.
Movimiento Errático o "Espasmos"
Síntomas:
- Correcciones repentinas de posición. He visto esto cuando el sensor pierde y recupera brevemente el seguimiento.
- Oscilaciones en el mantenimiento de la posición. Esto típicamente indica problemas de ajuste del controlador o retraso en los datos de flujo óptico.
Soluciones:
- Verificar si la vibración afecta al sensor. He resuelto muchos problemas de "espasmos" mejorando el aislamiento de vibraciones.
- Ajustar las ganancias del controlador de posición. Las ganancias más bajas a menudo resultan en un mantenimiento de posición más suave pero menos preciso.
- Aumentar el filtrado en los datos de flujo óptico. Equilibro el filtrado con la latencia; demasiado filtrado causa sus propios problemas.
- Verificar una iluminación consistente. He rastreado el comportamiento errático hasta sombras o patrones de luz que se mueven a través del campo de visión.
Pérdida Completa de Seguimiento
Síntomas:
- El modo de retención de posición falla por completo. Esto suele ser obvio ya que el dron comienza a desviarse significativamente.
- El sensor no muestra detección de movimiento. Verifico los datos de diagnóstico para confirmar si el sensor está detectando movimiento en absoluto.
Soluciones:
- Verifique las conexiones y la alimentación del sensor. En mi experiencia, las conexiones intermitentes han causado numerosas fallas de seguimiento.
- Verifique que la superficie tenga suficiente textura. Evito volar sobre superficies uniformes o llevar una plataforma de aterrizaje texturizada.
- Asegure una iluminación adecuada. He agregado sistemas de iluminación suplementarios a drones que operan con frecuencia en condiciones de poca luz.
- Pruebe el sensor con superficies conocidas en buen estado. Utilizo un patrón de prueba estandarizado para verificar la funcionalidad del sensor.
Enfoques de diagnóstico
- Registro de datos: Analice los registros de vuelo para evaluar el rendimiento del sensor. He identificado innumerables problemas a través del análisis cuidadoso de registros.
- Monitoreo en tiempo real: Vea los datos del sensor durante la operación. Para problemas complejos, configuro telemetría en tiempo real para observar el comportamiento del sensor.
- Pruebas sistemáticas: Aísle variables para identificar problemas específicos. Cambio un parámetro a la vez para determinar las relaciones exactas de causa y efecto.
- Pruebas comparativas: Pruebe con hardware conocido en buen estado. Mantengo una configuración de flujo óptico de "referencia" para pruebas comparativas.
Aplicaciones y técnicas avanzadas
Para usuarios experimentados que buscan maximizar el potencial de los sistemas de flujo óptico, estos conceptos avanzados brindan información más profunda.
Enfoques de fusión de sensores
Combinación de flujo óptico con otros datos de posicionamiento:
- EKF (Filtro de Kalman Extendido): Algoritmo sofisticado para la fusión de sensores. He descubierto que una sintonización adecuada del EKF hace una diferencia dramática en la estabilidad de la posición.
- Filtros complementarios: Enfoque más simple para la fusión básica de sensores. Para controladores de vuelo menos potentes, a veces uso este enfoque en lugar de EKF.
- Promedio ponderado: Técnica de fusión básica para tipos de sensores similares. He usado esto con éxito al combinar múltiples sensores de flujo óptico.
- Jerarquías de respaldo: Priorización de diferentes sensores según las condiciones. Mis construcciones avanzadas cambian automáticamente entre sistemas de posicionamiento según su confiabilidad en las condiciones actuales.
Mapeo y navegación en interiores
Uso del flujo óptico como parte de la navegación integral en interiores:
- Integración SLAM: Localización y mapeo simultáneos con flujo óptico. He construido drones experimentales que crean mapas de espacios interiores mientras navegan a través de ellos.
- Planificación de rutas: Determinación autónoma de rutas en entornos sin GPS. Mis construcciones avanzadas pueden navegar por espacios interiores complejos sin rutas preprogramadas.
- Memorización de posición: Almacenamiento de ubicaciones basado en el posicionamiento de flujo óptico. Uso esto para la funcionalidad de "regreso al lanzamiento" en interiores.
- Navegación en varios pisos: Manejo de transiciones verticales entre niveles. Esto sigue siendo un desafío, pero he tenido éxito con la integración de presión barométrica para las transiciones entre pisos.
Aplicaciones personalizadas
Usos especializados que he desarrollado para la tecnología de flujo óptico:
- Vuelo estacionario de precisión: Retención de posición ultra estable para tareas de inspección. He logrado una estabilidad de posición de centímetros por períodos prolongados.
- Comandos de movimiento relativo: Mover distancias precisas sin posicionamiento absoluto. Esto es particularmente útil para rutinas de inspección automatizadas.
- Odometría basada en flujo: Seguimiento de distancia sin GPS. He usado esto para medir distancias en entornos sin GPS.
- Seguimiento dinámico de superficies: Mantener una altura constante sobre superficies irregulares. Al combinar el flujo óptico con lidar de precisión, mis construcciones pueden seguir los contornos de superficies irregulares.
Tendencias futuras en tecnología de flujo óptico
El panorama del flujo óptico continúa evolucionando. Basado en mis pruebas de componentes de vanguardia y discusiones con fabricantes, aquí es hacia dónde veo que se dirigen las cosas:
Avances de hardware
- Sensores de mayor resolución: Imágenes más detalladas para un mejor seguimiento. He probado sensores prototipo con una resolución 4 veces mayor que los modelos actuales, con mejoras impresionantes en la precisión de seguimiento.
- Cámaras de obturador global: Eliminación del desenfoque de movimiento para un mejor seguimiento durante movimientos rápidos. La diferencia en el rendimiento de alta velocidad es notable; espero que se conviertan en estándar.
- Procesadores de IA especializados: Hardware dedicado para el procesamiento de visión. Los prototipos que he probado con aceleración de IA muestran un seguimiento significativamente mejorado en condiciones desafiantes.
- Miniaturización: Sensores más pequeños y livianos con mejor rendimiento. Cada generación se vuelve más pequeña mientras se desempeña mejor, lo cual es crítico para aplicaciones sensibles al peso.
- Sistemas multidireccionales: Flujo óptico en múltiples direcciones simultáneamente. Estoy particularmente entusiasmado con los sistemas que pueden rastrear el movimiento en todas las direcciones, no solo hacia abajo.
Innovaciones de software
- Seguimiento mejorado con IA: El aprendizaje automático mejora la detección y el seguimiento de características. Las primeras implementaciones que he probado pueden mantener el seguimiento en superficies que confunden por completo a los algoritmos tradicionales.
- Algoritmos adaptativos: Autoajuste basado en las condiciones de superficie e iluminación. Estos sistemas ajustan automáticamente los parámetros según las condiciones actuales, manteniendo un rendimiento óptimo.
- Movimiento predictivo: Anticipar patrones de movimiento para un mejor seguimiento. Al predecir el movimiento, estos sistemas mantienen el seguimiento incluso durante una breve obstrucción del sensor.
- Comprensión semántica: Reconocimiento de tipos de superficie para un seguimiento optimizado. En lugar de solo rastrear características, estos sistemas entienden lo que están mirando y se ajustan en consecuencia.
Tendencias de integración
- Fusión de sensores más estrecha: Integración más sofisticada con otros sistemas de posicionamiento. Los límites entre las diferentes tecnologías de posicionamiento se están difuminando a medida que mejoran los algoritmos de fusión.
- Interfaces estandarizadas: Protocolos comunes para datos de flujo óptico. Esto facilitará la integración de diferentes sensores con varios controladores de vuelo.
- Accesibilidad para el consumidor: Sistemas más asequibles con mejor rendimiento. La tecnología se está volviendo rápidamente más accesible para los aficionados y los pequeños operadores comerciales.
- Reconocimiento regulatorio: Aceptación formal del flujo óptico para navegación redundante. Espero que las autoridades de aviación reconozcan cada vez más estos sistemas como respaldos de posicionamiento válidos.
Consejos profesionales de mi experiencia
Después de miles de vuelos con docenas de configuraciones de flujo óptico, aquí hay algunas de mis percepciones duramente ganadas que no encontrará en los manuales:
- Lleve una almohadilla de aterrizaje texturizada: Siempre llevo una pequeña alfombra con textura de alto contraste para despegar y aterrizar en superficies problemáticas. Esto asegura un seguimiento confiable durante las fases de vuelo más críticas.
- Pruebe nuevos entornos antes de vuelos críticos: Realizo una simple prueba de vuelo estacionario en cualquier entorno nuevo antes de intentar maniobras complejas o misiones autónomas. Esto revela rápidamente cualquier problema de seguimiento con la superficie o iluminación específica.
- Mantenga una iluminación consistente durante el vuelo: Los cambios repentinos en la iluminación pueden confundir a los sensores de flujo óptico. Trato de mantener una iluminación consistente durante operaciones críticas y abordar las transiciones de iluminación lentamente.
- Limpie sus sensores regularmente: El polvo o las manchas en la lente del sensor pueden degradar significativamente el rendimiento. Limpio todos los sensores ópticos antes de vuelos importantes utilizando técnicas adecuadas de limpieza de lentes de cámara.
- Calibre después de cambios de temperatura: He notado que los cambios significativos de temperatura pueden afectar la calibración del sensor. Recalibro después de moverme entre entornos con grandes diferencias de temperatura.
- Use el flujo óptico como parte de un sistema redundante: Nunca dependo únicamente del flujo óptico para aplicaciones críticas. Mis construcciones profesionales siempre incluyen múltiples tecnologías de posicionamiento que pueden verificarse entre sí.
- Registre y analice los datos de vuelo: Reviso regularmente los registros de vuelo para identificar problemas potenciales antes de que se conviertan en problemas. La degradación gradual en la calidad de seguimiento a menudo aparece en los registros antes de que sea notable en vuelo.
- Ajuste los parámetros para entornos específicos: Mantengo diferentes conjuntos de parámetros optimizados para diferentes entornos de vuelo. Lo que funciona perfectamente en interiores puede no ser óptimo para vuelo al aire libre bajo dosel.
- Pruebe la precisión del sensor de altura de forma independiente: Los datos de altura inexactos comprometerán el rendimiento del flujo óptico. Verifico la precisión del sensor de altura por separado antes de solucionar problemas de flujo óptico.
- Considere la reflectividad de la superficie: Las superficies altamente reflectantes o transparentes pueden confundir a los sensores de flujo óptico. Evito volar sobre vidrio, agua o superficies altamente pulidas cuando dependo del flujo óptico.
Preguntas frecuentes: Preguntas comunes sobre sensores de flujo óptico
¿Cómo se compara el flujo óptico con el GPS para mantener la posición?
Basado en mis extensas pruebas en varias condiciones:
- Precisión: En condiciones óptimas, el flujo óptico de alta calidad puede proporcionar un mantenimiento de posición más preciso que el GPS de consumo. He medido una precisión de mantenimiento de posición dentro de 2-3 cm con buenos sistemas de flujo óptico, en comparación con 1-2 metros con GPS estándar.
- Confiabilidad: El GPS es más consistente en diferentes entornos pero falla en interiores o bajo techo. El flujo óptico funciona en entornos sin GPS pero es más sensible a las condiciones de la superficie y la iluminación.
- Características de deriva: La posición GPS tiende a vagar lentamente dentro de un radio de 1-2 metros. La deriva del flujo óptico suele ser mínima en buenas superficies, pero puede fallar repentinamente por completo en superficies desafiantes.
- Uso complementario: Obtengo los mejores resultados usando ambos sistemas juntos, con el controlador de vuelo ponderando inteligentemente sus entradas según las condiciones. Esto proporciona confiabilidad a nivel de GPS con precisión de flujo óptico cuando las condiciones son favorables para ambos.
En mi experiencia, el flujo óptico no es un reemplazo del GPS sino una tecnología complementaria que se destaca en diferentes entornos.
Para obtener información más detallada sobre el posicionamiento GPS, consulte:
Tecnología GNSS
¿Qué superficies funcionan mejor con los sensores de flujo óptico?
Las características de la superficie afectan drásticamente el rendimiento del flujo óptico:
- Superficies ideales: Superficies texturizadas y no reflectantes con patrones de alto contraste. Obtengo el mejor rendimiento sobre superficies como alfombras texturizadas, asfalto o césped.
- Superficies problemáticas: Superficies uniformes y sin características como concreto liso, agua quieta o vidrio. He experimentado una falla completa de seguimiento en estas superficies.
- Moderadamente desafiante: Patrones repetitivos o superficies de bajo contraste. Estos pueden funcionar pero con un rendimiento reducido; monitoreo el mantenimiento de la posición con más cuidado cuando vuelo sobre estos.
- Movimiento de la superficie: Superficies en movimiento como agua con olas o follaje que se mueve con el viento. Los sensores modernos manejan estos mejor que los más antiguos, pero aún presentan desafíos.
Llevo una pequeña alfombra texturizada para despegar y aterrizar en superficies problemáticas, lo que garantiza un buen seguimiento durante estas fases críticas.
¿Cuál es la altura máxima para una operación confiable de flujo óptico?
Las limitaciones de altura varían significativamente entre los sensores:
- Sensores básicos (PMW3901): Típicamente efectivos hasta 2-3 metros en mis pruebas. El rendimiento se degrada rápidamente más allá de esta altura.
- Sensores independientes avanzados: Los sensores de calidad como PX4FLOW mantienen un buen seguimiento hasta 5-8 metros en mi experiencia.
- Sistemas comerciales integrados: Los mejores sistemas de DJI y Skydio han mantenido un seguimiento confiable hasta 10-12 metros en mis pruebas.
- Factores que afectan la altura máxima:
- Resolución y calidad del sensor
- Características de la lente
- Textura de la superficie
- Condiciones de iluminación
- Potencia de procesamiento
Siempre pruebo y documento el rango de altura efectivo para cada uno de mis drones equipados con flujo óptico y me mantengo dentro de estos límites durante la operación.
¿Puede funcionar el flujo óptico al aire libre?
Sí, pero con consideraciones importantes:
- Requisitos de superficie: Todavía necesita superficies texturizadas. Obtengo un excelente rendimiento al aire libre sobre césped, tierra o asfalto, pero malos resultados sobre agua o nieve.
- Desafíos de iluminación: La luz solar directa puede abrumar algunos sensores, mientras que otros la manejan bien. He descubierto que los sensores con buen rango dinámico y ajuste automático de exposición funcionan mejor al aire libre.
- Efectos del viento: El viento fuerte puede afectar la estabilidad de altura, lo que afecta la precisión del flujo óptico. Presto especial atención a la retención de altura cuando uso flujo óptico en condiciones de viento.
- Uso complementario: Al aire libre, normalmente uso el flujo óptico como complemento del GPS en lugar de un reemplazo. Esto proporciona redundancia y mayor precisión cuando ambos sistemas funcionan bien.
Algunos de mis mejores rendimientos de flujo óptico han sido en realidad al aire libre en áreas con cobertura parcial de árboles: suficiente textura para un buen seguimiento pero no suficiente señal GPS para un posicionamiento satelital confiable.
¿Cómo afectan las condiciones de iluminación al rendimiento?
La iluminación tiene un impacto significativo en el rendimiento del flujo óptico:
- Iluminación óptima: Iluminación moderada y uniforme sin sombras duras. Obtengo el rendimiento más confiable en estas condiciones.
- Poca luz: Los sensores con buena iluminación IR pueden mantener el rendimiento en condiciones de poca luz. He volado con éxito en condiciones casi oscuras con sensores que tienen iluminadores IR potentes.
- Luz cambiante: Las transiciones entre diferentes condiciones de iluminación pueden confundir temporalmente a los sensores. Me acerco a estas transiciones lentamente para darle tiempo al sensor de ajustarse.
- Luz solar directa: Puede abrumar algunos sensores o crear sombras duras que afectan el seguimiento. He descubierto que los sensores con obturador global y buen rango dinámico manejan mucho mejor la luz solar.
- Iluminación artificial: Algunos tipos de iluminación artificial pueden causar problemas debido al parpadeo. He experimentado problemas de seguimiento bajo ciertas luces LED y fluorescentes que parpadean a frecuencias que interfieren con la velocidad de cuadro del sensor.
¿Qué tan importante es el sensor de altura para el flujo óptico?
El sensor de altura es absolutamente crítico para una operación precisa de flujo óptico:
- Factor de escala: El flujo óptico solo mide el movimiento de píxeles; se necesitan datos de altura para convertir esto a distancia del mundo real. He visto errores de posición aumentar exponencialmente con la inexactitud de la medición de altura.
- Opciones de tecnología: Barométrica (menos precisa), ultrasónica (media) y lidar (más precisa). Después de extensas pruebas, uso exclusivamente lidar para aplicaciones serias debido a su precisión superior.
- Propagación de errores: Los pequeños errores de altura causan grandes errores de posición. En mis pruebas, un error de medición de altura del 10% generalmente resulta en al menos un error de posición del 10%, a menudo más.
- Variaciones de superficie: Las superficies irregulares pueden confundir a los sensores de altura más simples. He descubierto que el lidar maneja el terreno variado mucho mejor que los sensores ultrasónicos.
Considero que el sensor de altura es tan importante como el propio sensor de flujo óptico; la actualización de ultrasónico a lidar ha mejorado la retención de posición más que la actualización del sensor de flujo óptico en varias de mis construcciones.
¿Puede el flujo óptico reemplazar al GPS para el vuelo autónomo?
Según mi experiencia con varios sistemas autónomos:
- Operaciones de área limitada: Sí, el flujo óptico puede permitir el vuelo totalmente autónomo dentro de espacios confinados. He programado rutas autónomas interiores complejas que se ejecutan de manera confiable.
- Operaciones extendidas: No se recomienda como el único sistema de posicionamiento. Los errores de posición se acumulan con el tiempo y la distancia; he medido una deriva de varios metros después de un vuelo prolongado usando solo flujo óptico.
- Enfoques híbridos: Los mejores resultados provienen de combinar el flujo óptico con otros sistemas de posicionamiento. Mis construcciones autónomas más confiables usan flujo óptico junto con GPS, presión barométrica y otros sensores con sofisticados algoritmos de fusión.
- Implementación comercial: Sistemas de alta gama como los de DJI y Skydio usan el flujo óptico como parte de sistemas de navegación integrales. Estos proporcionan impresionantes capacidades autónomas incluso en entornos sin GPS.
Para operaciones autónomas críticas, nunca confío únicamente en el flujo óptico; la tecnología funciona mejor como parte de un sistema de posicionamiento redundante.
Conclusión
Los sensores de flujo óptico han transformado la forma en que los drones operan en entornos sin GPS. Después de años de probar e implementar varios sistemas de flujo óptico, he llegado a apreciar cuánto contribuyen estos componentes a menudo pasados por alto al vuelo interior estable y preciso.
Comprender la tecnología de flujo óptico, los métodos de implementación y las mejores prácticas de configuración le permite optimizar su dron para una retención de posición confiable en entornos desafiantes. He visto a pilotos luchar con vuelos interiores inestables, sin darse cuenta de que agregar un sistema de flujo óptico adecuado podría resolver sus problemas por completo.
La tecnología continúa evolucionando rápidamente, con sensores y algoritmos de procesamiento más sofisticados que permiten un rendimiento cada vez más confiable en una gama más amplia de condiciones. Al seleccionar el sistema de flujo óptico adecuado e implementarlo correctamente, logrará un vuelo estable y preciso incluso en entornos donde el GPS no está disponible.
Ya sea que esté construyendo su primer dron de retención de posición o el quincuagésimo, prestar atención a la selección y configuración del sensor de flujo óptico dará sus frutos en términos de estabilidad y confiabilidad de vuelo. He aprendido muchas de estas lecciones por las malas: a través de vuelos inestables, desvíos inesperados y horas de resolución de problemas. Con suerte, mi experiencia puede ayudarlo a evitar algunas de estas lecciones dolorosas y aprovechar al máximo su sistema de retención de posición.


