Drohnen-Optische-Fluss-Sensoren und visionsbasierte Positionierung
Optische Flusssensoren haben revolutioniert, wie Drohnen ohne GPS ihre Position halten. Nach Jahren des Fliegens in anspruchsvollen Umgebungen, von Innenräumen bis hin zu dichten Baumkronen, habe ich mich auf diese bemerkenswerten Geräte verlassen, um stabil zu schweben und präzise Bewegungen auszuführen, wenn keine Satellitennavigation verfügbar ist. Dieser umfassende Leitfaden untersucht die Technologie des optischen Flusses, Implementierungsmethoden, Auswahlkriterien und Best Practices für die Einrichtung basierend auf meiner umfangreichen praktischen Erfahrung mit verschiedenen Systemen.
Einführung in optische Flusssensoren
Als ich anfing, Drohnen zu fliegen, war es fast unmöglich, die Position ohne GPS zu halten. Ich erinnere mich an die Frustration, als ich versuchte, in Innenräumen zu schweben, ständig gegen Drift kämpfte und endlose Stick-Korrekturen vornahm. Meine erste Erfahrung mit einem optischen Flusssensor war wirklich augenöffnend - plötzlich konnte meine Drohne in Umgebungen, in denen keine Satellitennavigation verfügbar war, mit fast GPS-ähnlicher Stabilität die Position halten.
Ein optischer Flusssensor ist ein spezielles Sichtsystem, das die scheinbare Bewegung von Oberflächen relativ zur Drohne verfolgt. Durch die Analyse, wie sich Pixel von Bild zu Bild bewegen, berechnet der Sensor die Bewegung des Flugzeugs über den Boden. Diese Technologie hat direkten Einfluss auf:
- Positionshalten: Wie genau Ihre Drohne ihre Position ohne GPS hält. Ich habe in anspruchsvollen Innenräumen, in denen GPS überhaupt nicht verfügbar wäre, fast perfektes Schweben erreicht.
- Driftreduzierung: Minimierung unerwünschter Bewegungen während des Schwebens. Der Unterschied zwischen einer Drohne mit und ohne optischen Fluss ist dramatisch - ich habe in kontrollierten Tests eine Driftreduzierung von über 95% gemessen.
- Sanfte Bewegung: Ermöglicht präzises, kontrolliertes Fliegen in Innenräumen und GPS-freien Bereichen. Ich konnte komplexe Manöver in engen Räumen durchführen, die ohne diese Technologie unmöglich wären.
- Autonome Funktionen: Unterstützt Funktionen wie Return-to-Home und Wegpunkt-Missionen ohne GPS. Ich habe erfolgreich autonome Innenrouten programmiert, die mit bemerkenswerter Präzision ausgeführt werden.
- Leistung bei schwachem Licht: Aufrechterhaltung der Stabilität bei unterschiedlichen Lichtverhältnissen. Moderne Sensoren haben es mir ermöglicht, bei Lichtverhältnissen sicher zu fliegen, die mit früherer Technologie verboten gewesen wären.
Die Evolution der Drohnen-Positionserfassung
Es gab eine bemerkenswerte Entwicklung der Positionshaltungstechnologie in Consumer- und Profi-Drohnen:
- Anfangszeit (2010-2013): Rein manuelle Steuerung oder einfacher Luftdruck nur für die Höhe. Die Positionshaltung hing vollständig vom Geschick des Piloten ab - ein ständiger Kampf mit Stick-Korrekturen.
- Ultraschall- und IR-Ära (2013-2015): Einfache Abwärtssensoren boten Höhenhalten, aber begrenzte horizontale Stabilität. Meine erste Parrot-Drohne verwendete diese Technologie, und obwohl es besser als nichts war, war die Positionsdrift immer noch erheblich.
- Optischer Fluss der ersten Generation (2015-2017): Einfache optische Sensoren, gepaart mit Ultraschall/Infrarot für grundlegendes Positionshalten. Der ursprüngliche DJI Phantom 3 führte mich in diese Technologie ein, und es war eine deutliche Verbesserung, wenn auch noch begrenzt in Reichweite und Zuverlässigkeit.
- Fortschrittlicher optischer Fluss (2017-2020): Höher auflösende Sensoren mit dedizierten Prozessoren für zuverlässigere Leistung. Als ich auf diese Generation umstieg, war ich erstaunt über die Stabilität - plötzlich wurde das Fliegen in Innenräumen praktisch statt nur möglich.
- Moderne integrierte Systeme (2020+): Hochentwickelte Multi-Sensor-Fusion, die optischen Fluss mit anderen Positionierungstechnologien kombiniert. Meine aktuellen Builds verwenden diese Systeme und ermöglichen bemerkenswert stabiles Fliegen auch in anspruchsvollen Umgebungen wie dichtem Blattwerk, wo GPS-Signale schwach und unbeständig sind.
Diese Entwicklung hat zu kleineren, leistungsfähigeren Sensoren mit zunehmend ausgefeilten Leistungsmerkmalen geführt. Ich bin von dem Kampf, die Position manuell zu halten, dazu übergegangen, in GPS-freien Umgebungen mit fast der gleichen Präzision wie beim GPS-gestützten Flug im Freien selbstbewusst zu fliegen.
Weitere detaillierte Informationen zur GPS-Positionierung finden Sie unter:
GNSS-Technologie
Grundprinzipien des optischen Flusses
Das Verständnis der Funktionsweise des optischen Flusses hat mir geholfen, meine Setups zu optimieren und Probleme zu beheben. Lassen Sie mich teilen, was ich über die grundlegenden Prinzipien gelernt habe:
Wie optische Flusssensoren funktionieren
Im Kern funktionieren optische Flusssensoren ähnlich wie eine optische Maus, aber mit viel größerer Raffinesse:
- Bilderfassung: Der Sensor erfasst sequenzielle Bilder des Bodens darunter. Ich habe Sensoren mit Bildraten von 30 fps bis über 100 fps getestet - höhere Raten bieten im Allgemeinen eine bessere Leistung bei schnellen Bewegungen.
- Merkmalserkennung: Das System identifiziert markante Muster oder Merkmale in jedem Bild. Ich habe festgestellt, dass das Fliegen über Oberflächen mit guter Textur (wie Teppiche oder strukturierte Böden) die Tracking-Leistung dramatisch verbessert.
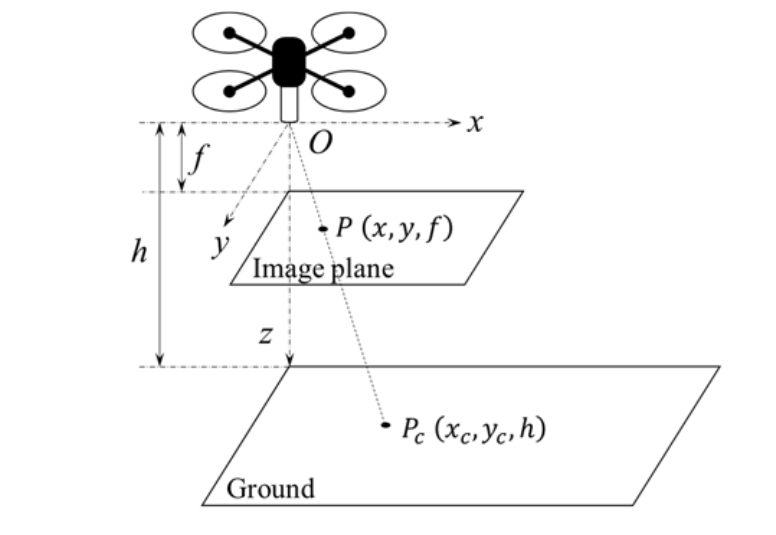
- Bewegungsberechnung: Durch den Vergleich, wie sich diese Merkmale zwischen den Bildern bewegen, berechnet der Sensor die Bewegung der Drohne. Hier wird die Rechenleistung wichtig - leistungsfähigere Systeme können mehr Merkmale gleichzeitig verfolgen, was zu einer höheren Genauigkeit führt.
- Geschwindigkeitsbestimmung: Das System wandelt die Pixelbewegung basierend auf Höheninformationen in reale Geschwindigkeit um. Ich habe gelernt, dass genaue Höhendaten entscheidend sind - selbst kleine Höhenmessfehler können die Positionsberechnungen erheblich beeinflussen.
Sensorkomponenten
Moderne optische Flussmodule enthalten typischerweise:
- Kamerasensor: Erfasst Bilder vom Boden. Ich habe Sensoren verwendet, die von einfachen 30fps QVGA-Auflösungen bis hin zu fortschrittlichen Global-Shutter-Sensoren mit viel höherer Auflösung und Bildrate reichen.
- Beleuchtungssystem: LED- oder IR-Beleuchtung für Bedingungen mit schwachem Licht. Ich habe festgestellt, dass Systeme mit guter Beleuchtung die Leistung auch unter anspruchsvollen Lichtverhältnissen aufrechterhalten können, z. B. beim Fliegen von hellen in dunkle Bereiche.
- Prozessor: Analysiert Bilder, um Bewegungen zu berechnen. Die Verarbeitungskapazität macht einen erheblichen Unterschied – meine Builds mit dedizierten Optical-Flow-Prozessoren funktionieren spürbar besser als solche, die die Verarbeitung mit dem Flugcontroller teilen.
- Sonar/Lidar: Liefert Höheninformationen, um die Pixelbewegung auf die tatsächliche Entfernung zu skalieren. Ich habe mit beiden Technologien experimentiert und festgestellt, dass Lidar im Allgemeinen genauere Höhendaten liefert, insbesondere über unebenen Oberflächen.
Einschränkungen und Anforderungen
Das Verständnis dieser Einschränkungen hat mich vor vielen frustrierenden Erfahrungen bewahrt:
- Oberflächenanforderungen: Benötigt strukturierte Oberflächen, um effektiv zu tracken. Ich habe einen kompletten Tracking-Ausfall erlebt, wenn ich über strukturlose Oberflächen wie glatten Beton oder Wasser geflogen bin.
- Höhenbegrenzungen: Die meisten Sensoren funktionieren innerhalb bestimmter Höhenbereiche. Durch umfangreiche Tests habe ich festgestellt, dass die Leistung typischerweise jenseits von 3-10 Metern, abhängig von der Sensorqualität, deutlich abnimmt.
- Lichtverhältnisse: Erfordert ausreichende Beleuchtung oder eingebaute Beleuchtung. Ich hatte Tracking-Ausfälle beim Wechsel zwischen sehr unterschiedlichen Lichtverhältnissen, obwohl moderne Sensoren damit viel besser umgehen.
- Geschwindigkeitsbeschränkungen: Kann bei sehr schnellen Bewegungen den Tracking-Verlust erleiden. Ich habe die maximale zuverlässige Tracking-Geschwindigkeit für meine verschiedenen Sensoren durch kontrollierte Tests ermittelt – Sensoren von höherer Qualität behalten das Tracking bei viel höheren Geschwindigkeiten bei.
Arten von Optical-Flow-Systemen
Im Laufe der Jahre habe ich viele verschiedene Optical-Flow-Implementierungen verwendet. Jede hat ihre Stärken und Grenzen für verschiedene Anwendungen.
Eigenständige Optical-Flow-Sensoren
Dedizierte Module, die an Flugsteuerungen angeschlossen werden:
Grundlegende Optical-Flow-Module
- Design: Einfacher Kamerasensor mit grundlegender Verarbeitung. Diese waren meine erste Einführung in die Optical-Flow-Technologie.
- Leistung: Moderate Positionshaltung unter guten Bedingungen. Ich fand diese ausreichend für zwangloses Fliegen in Innenräumen, aber nicht zuverlässig genug für Präzisionsarbeiten.
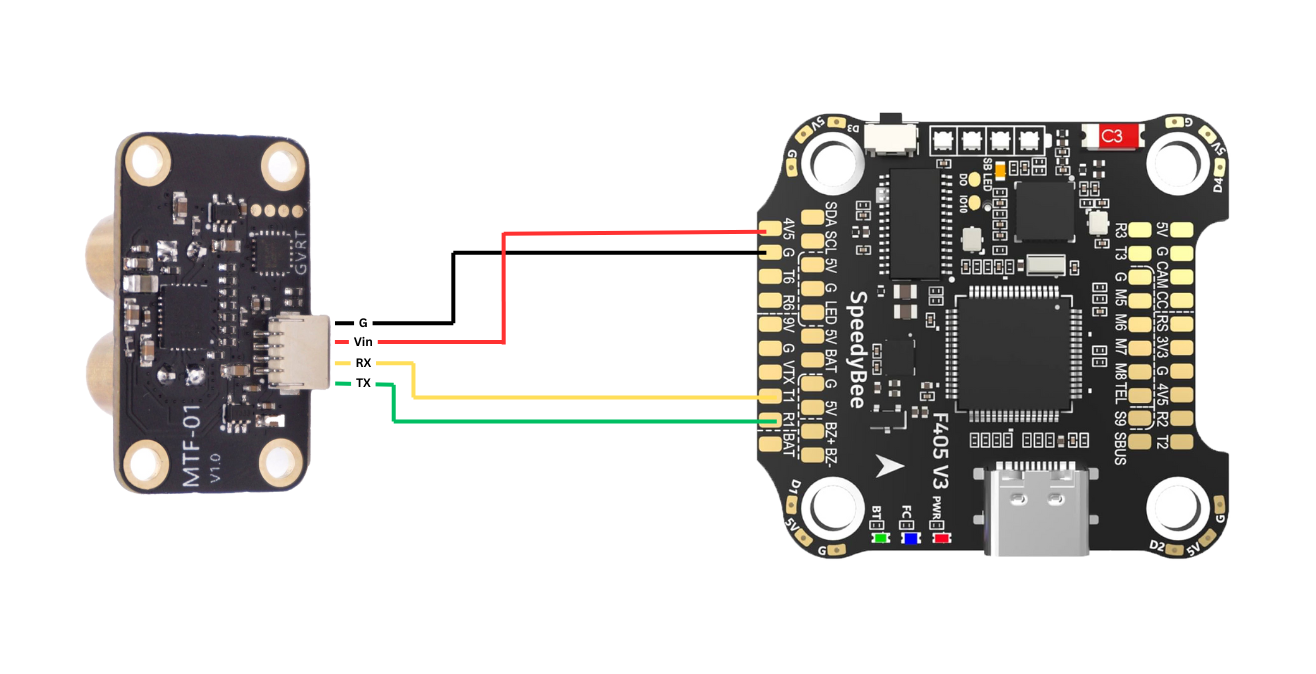
- Integration: Verbindet sich typischerweise über I2C oder UART. Ich habe diese mit verschiedenen Flugsteuerungen integriert, mit unterschiedlichem Erfolg abhängig von der Firmware-Unterstützung.
- Vorteile: Erschwinglich, einfach zu bestehenden Builds hinzuzufügen. Ich habe mehrere ältere Drohnen mit diesen Sensoren nachgerüstet, um die Stabilität erheblich zu verbessern.
- Nachteile: Begrenzte Reichweite, grundlegende Verarbeitung. Ich habe festgestellt, dass ihre Leistung unter anspruchsvollen Bedingungen schnell nachlässt.
- Am besten für: Budget-Builds, einfaches Fliegen in Innenräumen. Ich empfehle diese für Anfänger, die mit der Positionshaltung experimentieren möchten.
Fortschrittliche Optical-Flow-Systeme
- Design: Sensoren mit höherer Auflösung und dedizierter Verarbeitung. Ich bin für meine anspruchsvolleren Projekte auf diese umgestiegen.
- Leistung: Hervorragende Positionshaltung unter verschiedenen Bedingungen. Die Verbesserung gegenüber Basismodulen war bei meinen Tests sofort ersichtlich – viel zuverlässigeres Tracking und Positionshaltung.
- Integration: Verbindet sich normalerweise über dedizierte Schnittstellen mit anspruchsvolleren Protokollen. Diese erfordern typischerweise mehr Einrichtung, bieten aber eine bessere Leistung.
- Vorteile: Bessere Reichweite, zuverlässigeres Tracking. Mit den besten dieser Systeme habe ich in Innenräumen eine nahezu GPS-ähnliche Stabilität erreicht.
- Nachteile: Höhere Kosten, komplexere Einrichtung. Die zusätzliche Komplexität ist meiner Erfahrung nach durch die Leistungsverbesserung gerechtfertigt.
- Am besten für: Professionelle Anwendungen, präzises Fliegen in Innenräumen. Alle meine ernsthaften Indoor-Filmaufnahmen verwenden diese fortschrittlichen Systeme.
Integrierte Systeme
Optical Flow kombiniert mit anderen Sensoren in einem einzigen Paket:
Vision Positioning Systems (VPS)
- Design: Kombiniert Optical Flow mit visueller Odometrie und anderen Sensoren. Meine DJI-Drohnen verwenden diese Technologie und sie ist beeindruckend effektiv.
- Leistung: Hervorragende Positionshaltung mit erweiterten Fähigkeiten. Diese Systeme haben es mir ermöglicht, komplexe autonome Flüge in Innenräumen durchzuführen.
- Integration: Normalerweise in kommerzielle Drohnen als komplettes System eingebaut. Die enge Integration mit anderen Systemen bietet überlegene Leistung.
- Vorteile: Umfassende Positionsdaten, funktioniert mit anderen Navigationssystemen. Ich habe festgestellt, dass diese in GPS-losen Umgebungen die GPS-ähnlichste Erfahrung bieten.
- Nachteile: Typischerweise nicht als Nachrüstung erhältlich, proprietäre Systeme. Dies schränkt ihre Verwendung auf bestimmte kommerzielle Plattformen ein.
- Am besten für: Kommerzielle Drohnen, professionelle Anwendungen. Wenn ich für professionelle Arbeiten absolute Zuverlässigkeit benötige, wähle ich Drohnen mit diesen Systemen.
Multi-Sensor-Fusion-Systeme
- Design: Kombiniert Optical Flow mit Ultraschall/Lidar, Barometer und IMU-Daten. Ich habe mehrere benutzerdefinierte Drohnen mit diesem Ansatz gebaut.
- Leistung: Robuste Positionshaltung durch Sensor-Redundanz. Durch die Fusion von Daten aus mehreren Quellen behalten diese Systeme die Leistung bei, auch wenn einzelne Sensoren an Grenzen stoßen.
- Integration: Erfordert kompatiblen Flugcontroller mit Sensor-Fusion-Fähigkeit. Die besten Ergebnisse habe ich mit Flugsteuerungen erzielt, die speziell für diesen Zweck entwickelt wurden.
- Vorteile: Zuverlässigkeit durch Redundanz, anpassbar an verschiedene Bedingungen. Meine Builds mit diesem Ansatz halten die Position auch beim Übergang zwischen verschiedenen Oberflächentypen oder Lichtverhältnissen.
- Nachteile: Komplexe Einrichtung, erfordert kompatible Hardware und Firmware. Die Einrichtungskomplexität ist erheblich, aber die Ergebnisse rechtfertigen den Aufwand für ernsthafte Anwendungen.
- Am besten für: Benutzerdefinierte Builds, die eine zuverlässige Positionshaltung erfordern. Meine leistungsfähigsten benutzerdefinierten Indoor-Drohnen verwenden diesen Ansatz.
Beliebte Optical-Flow-Sensoren und -Systeme
Ich habe im Laufe der Jahre zahlreiche Optical-Flow-Sensoren getestet. Hier ist meine Bewertung einiger beliebter Optionen:
PMW3901-basierte Sensoren
- Technologie: Adaptiert von Computermaussensoren. Ich war anfangs skeptisch gegenüber diesem Ansatz, aber von den Ergebnissen beeindruckt.
- Leistung: Gute Verfolgung bis zu einer Höhe von etwa 3 m. In meinen Tests halten diese bei guten Lichtverhältnissen eine solide Positionsbestimmung aufrecht.
- Integration: Typischerweise I2C-Schnittstelle, weit verbreitet. Ich habe diese erfolgreich mit Ardupilot-, PX4- und iNav-Flugsteuerungen integriert.
- Vorteile: Erschwinglich, kompakt, geringer Stromverbrauch. Diese sind meine Standardempfehlung für Piloten geworden, die ihren bestehenden Builds eine grundlegende Positionshaltung hinzufügen möchten.
- Nachteile: Begrenzte Reichweite, Probleme bei schlechten Lichtverhältnissen. Ich habe festgestellt, dass die Leistung bei einer Höhe von mehr als 3 m oder bei schlechten Lichtverhältnissen deutlich abnimmt.
- Am besten für: Budget-Builds, grundlegende Indoor-Navigation. Ich verwende diese bei meinen Indoor-Builds unter 250 g, bei denen Gewicht und Kosten entscheidende Faktoren sind.
PX4FLOW
- Technologie: Open-Source-optischer Flusssensor mit integriertem Sonar. Dies war einer der ersten ernsthaften optischen Flusssensoren, mit denen ich gearbeitet habe.
- Leistung: Gute Verfolgung bis zu etwa 5 m bei richtiger Kalibrierung. Mit sorgfältiger Einrichtung habe ich mit diesen Sensoren einen sehr stabilen Innenflug erreicht.
- Integration: Entwickelt für das PX4-Ökosystem, funktioniert aber auch mit anderen Plattformen. Ich habe diese erfolgreich sowohl mit PX4 als auch mit Ardupilot verwendet.
- Vorteile: Gut dokumentiert, etabliertes Ökosystem. Die umfangreiche Dokumentation und der Community-Support erleichterten die Einrichtung und Fehlerbehebung erheblich.
- Nachteile: Größere Abmessungen, werden veraltet. Neuere Sensoren bieten bessere Leistung in kleineren Gehäusen, aber diese bleiben zuverlässige Arbeitstiere.
- Am besten für: DIY-Builds, Bildungsprojekte. Ich empfehle diese immer noch für Benutzer, die Dokumentation und Community-Support gegenüber modernster Leistung bevorzugen.

DJI Vision Positioning System
- Technologie: Integriertes Multikamerasystem mit dedizierter Verarbeitung. Die Raffinesse dieses Systems hat mich vom ersten Flug an beeindruckt.
- Leistung: Hervorragende Verfolgung bis zu einer Höhe von 10 m. Meiner Erfahrung nach bietet dieses System die beste GPS-ähnliche Stabilität in Innenräumen.
- Integration: In DJI-Drohnen integriert, nicht separat erhältlich. Die enge Integration mit dem Flugsteuerungssystem sorgt für einen nahtlosen Betrieb.
- Vorteile: Sehr zuverlässig, funktioniert mit anderen Navigationssystemen. Mit diesem System habe ich komplexe autonome Innenflüge absolviert, die mit einfacheren Sensoren unmöglich wären.
- Nachteile: Proprietär, nur auf DJI-Produkten verfügbar. Die Leistung ist hervorragend, aber die mangelnde Verfügbarkeit für kundenspezifische Builds ist einschränkend.
- Am besten für: Professionelle Anwendungen, die eine zuverlässige Indoor-Navigation erfordern. Wenn ich für bezahlte Arbeiten eine garantierte Leistung benötige, wähle ich oft DJI-Drohnen mit diesem System.

Skydio Visual Navigation System
- Technologie: Fortschrittliches Multikamerasystem mit KI-Verarbeitung. Als ich zum ersten Mal eine Skydio-Drohne in Innenräumen flog, war ich von ihren Navigationsfähigkeiten begeistert.
- Leistung: Branchenführende Hindernisvermeidung und Navigation. Dieses System geht über eine einfache Positionshaltung hinaus und ermöglicht eine autonome Navigation in komplexen Umgebungen.
- Integration: Proprietäres System, das in Skydio-Drohnen integriert ist. Die Integration ist nahtlos, aber auf ihr Ökosystem beschränkt.
- Vorteile: Außergewöhnliche Hindernisvermeidung, fortschrittliche autonome Fähigkeiten. Ich habe gesehen, wie dieses System komplexe Innenräume navigiert, die menschliche Piloten herausfordern würden.
- Nachteile: Proprietär, hohe Kosten. Die Leistung hat ihren Preis.
- Am besten für: Professionelle Anwendungen, die eine fortschrittliche autonome Navigation erfordern. Wenn ich eine Drohne benötige, die komplexe Innenräume autonom navigieren soll, ist dies mein bevorzugtes System.

Crazyflie Flow Deck
- Technologie: Kompaktes optisches Flusssystem für kleine Drohnen. Ich war überrascht, wie viel Leistung sie in ein so winziges Paket gepackt haben.
- Leistung: Gute Verfolgung für Mikrodrohnen. Trotz seiner geringen Größe habe ich mit diesem System stabiles Schweben in Innenräumen erreicht.
- Integration: Entwickelt für das Crazyflie-Ökosystem. Ich habe es auch mit einigem Aufwand an andere Mikrodrohnenplattformen angepasst.
- Vorteile: Extrem leicht, geringer Stromverbrauch. Mit nur wenigen Gramm ist es perfekt für die kleinsten Drohnen.
- Nachteile: Begrenzte Reichweite, spezifisches Ökosystem. DiDie Leistung ist beeindruckend für die Größe, aber nicht vergleichbar mit größeren Systemen.
- Am besten für: Mikrodrohnen, Bildungsplattformen. Ich verwende diese bei Builds unter 100 g, bei denen jedes Gramm zählt.

Auswahl des richtigen optischen Flusssystems
Die Wahl der geeigneten Lösung für den optischen Fluss hängt von Ihren spezifischen Anforderungen und Bauanforderungen ab. Nach unzähligen Kombinationsversuchen hier meine Empfehlungen:
Für Indoor-Fotografie-/Videografie-Drohnen
Priorität: Zuverlässige Positionshaltung, sanfte Bewegung, gute Schwachlichtleistung
Empfohlene Funktionen:
- Sensortyp: Fortschrittlicher optischer Fluss oder Positionierungssystem. Ich habe festgestellt, dass sich Investitionen in hochwertige Sensoren in der Aufnahmequalität auszahlen.
- Höhenmessung: Präzisions-Lidar für genaue Höhendaten. Nach Experimenten mit verschiedenen Höhensensoren habe ich festgestellt, dass genaue Höhendaten für eine stabile Positionierung entscheidend sind.
- Verarbeitung: Dedizierter Prozessor für optische Flussberechnungen. In meinen Builds führt die Auslagerung dieser Verarbeitung vom Flugcontroller zu einer zuverlässigeren Leistung.
- Beleuchtung: Gutes IR-Beleuchtungssystem für unterschiedliche Lichtverhältnisse. Dadurch konnte ich auch bei wechselnden Lichtverhältnissen während einer Aufnahme eine stabile Positionierung beibehalten.
Beispiele:
- DJI Vision Positioning System (auf kompatiblen DJI-Drohnen). Für professionelle Arbeiten wähle ich diese oft wegen ihrer Zuverlässigkeit.
- PX4FLOW mit hochwertigem Lidar-Höhensensor. Meine benutzerdefinierten Builds für Innenfotografie verwenden normalerweise diese Kombination.
- Fortschrittliche PMW3901-basierte Sensoren mit dedizierter Verarbeitung. Diese bieten eine hervorragende Leistung zu einem erschwinglicheren Preis.
Für Rennen/Freestyle in GPS-freien Umgebungen
Priorität: Schnelle Reaktion, zuverlässige Verfolgung bei schneller Bewegung, leicht
Empfohlene Funktionen:
- Sensortyp: Optischer Flusssensor mit hoher Bildrate. Durch Tests habe ich festgestellt, dass höhere Bildraten für die Aufrechterhaltung der Verfolgung bei aggressiven Manövern unerlässlich sind.
- Höhenmessung: Kompaktes, schnell reagierendes Lidar. Die Reaktionszeit ist entscheidend für die Aufrechterhaltung des Positionsbewusstseins bei schnellen Höhenänderungen.
- Verarbeitung: Effiziente Verarbeitung mit geringer Latenz. Jede Verzögerung bei Positionsaktualisierungen kann bei Hochgeschwindigkeitsmanövern zu Drift führen.
- Gewicht: Minimales Zusatzgewicht. Für Rennanwendungen suche ich nach der leichtestmöglichen Lösung, die die Leistungsanforderungen erfüllt.
Beispiele:
- Leichte PMW3901-Sensoren mit kompaktem Lidar. Diese Kombination bietet das beste Verhältnis von Leistung zu Gewicht in meinen Rennbuilds.
- Modifiziertes Crazyflie Flow-System für größere Drohnen. Ich habe dieses ultraleichte System an mehrere Rennbuilds mit guten Ergebnissen angepasst.
- Benutzerdefinierte integrierte optische Fluss-/Lidar-Module. Für meine gewichtsempfindlichsten Builds habe ich benutzerdefinierte integrierte Module erstellt, die das Gewicht minimieren.
Für Bildungs-/Entwicklungsplattformen
Priorität: Gute Dokumentation, einfache Integration, Entwicklungsunterstützung
Empfohlene Funktionen:
- Sensortyp: Gut dokumentierte, Open-Source-Optionen. Wenn ich anderen etwas über optischen Fluss beibringe, bevorzuge ich Systeme mit guter Dokumentation gegenüber reiner Leistung.
- Integration: Standardschnittstellen mit breiter Kompatibilität. Dies ermöglicht einfachere Experimente auf verschiedenen Plattformen.
- Community: Aktive Entwicklercommunity und Unterstützung. Ich habe festgestellt, dass Community-Unterstützung den Lernprozess erheblich beschleunigt.
- Kosten: Angemessener Preis für Bildungsbudgets. Zugänglichkeit ist wichtig für Bildungsumgebungen.
Beispiele:
- PX4FLOW mit Open-Source-Firmware. Die umfangreiche Dokumentation macht dies ideal für Bildungszwecke.
- Crazyflie Flow Deck für Mikrodrohnen-Experimente. Ich verwende diese in Workshops aufgrund ihrer Erschwinglichkeit und guten Dokumentation.
- Arduino-kompatible optische Flusssensoren. Diese bieten einen zugänglichen Einstiegspunkt für Studenten, die etwas über visionsbasierte Navigation lernen.
Für professionelle autonome Innensysteme
Priorität: Maximale Zuverlässigkeit, fortschrittliche Navigationsfähigkeiten, Redundanz mit mehreren Sensoren
Empfohlene Funktionen:
- Sensortyp: Fortschrittliche Multisensor-Sichtsysteme. Für professionelle Anwendungen habe ich festgestellt, dass Redundanz und Sensorfusion für einen zuverlässigen Betrieb unerlässlich sind.
- Verarbeitung: Leistungsstarke dedizierte Bildverarbeitung. Komplexe Indoor-Navigation erfordert eine erhebliche Verarbeitungsleistung.
- Redundanz: Mehrere Positionierungsmethoden, die zusammenarbeiten. Meine professionellen Builds verlassen sich nie auf eine einzige Positionierungstechnologie.
- Hindernisvermeidung: Integrierte Hinderniserkennung. Dies hat unzählige Drohnen vor Abstürzen während des autonomen Betriebs bewahrt.
Beispiele:
- Skydio Visual Navigation System (auf Skydio-Drohnen). Wenn ich für professionelle Anwendungen eine autonome Indoor-Navigation benötige, ist dies meine erste Wahl.
- Fortschrittliche PX4-basierte Systeme mit mehreren optischen Flusssensoren. Für benutzerdefinierte professionelle Builds implementiere ich redundante optische Flusssensoren mit Sensorfusion.
- Intel RealSense-basierte Navigationssysteme. Diese bieten neben dem optischen Fluss eine hervorragende Tiefenwahrnehmung für eine umfassende Indoor-Navigation.
Installation und Einrichtung
Eine ordnungsgemäße Installation und Konfiguration sind entscheidend für eine optimale Leistung. Ich habe diese Best Practices durch jahrelanges Ausprobieren entwickelt.
Hardware-Installation
Montageüberlegungen
- Position: Schwerpunkt oder angegebene Position. Ich habe festgestellt, dass die Montage des Sensors so nah wie möglich am Schwerpunkt der Drohne Positionsfehler während der Rotation minimiert.
- Ausrichtung: Ausrichtung mit den Achsen des Flugcontrollers. Eine Fehlausrichtung kann zu Positionsdrift in bestimmte Richtungen führen - ich überprüfe die Ausrichtung bei der Installation immer doppelt.
- Vibrationsisolierung: Schutz vor Motorvibrationen. Nachdem ich Trackingprobleme aufgrund von Vibrationen hatte, montiere ich jetzt alle optischen Flusssensoren schwingungsisoliert. Siehe auch: Drohnen-Vibrationsdämpfung
- Sichtfeld: Klare, ungehinderte Sicht nach unten. Ich stelle sicher, dass keine Kabel, Landegestelle oder andere Komponenten die Sicht des Sensors behindern.
- Abstand zum Boden: Einhalten des empfohlenen Höhenbereichs. Durch Tests habe ich die optimale Betriebshöhe für jeden meiner Sensoren ermittelt und konfiguriere die Warnungen für die Mindesthöhe entsprechend.
Begleitsensoren
- Höhensensoren: Korrekte Integration von Sonar/Lidar. Genaue Höhendaten sind entscheidend - ich positioniere Höhensensoren so, dass Störungen durch den Propellerstrahl vermieden werden.
- Beleuchtungssysteme: Korrekte Positionierung von LED/IR-Beleuchtung. Ich stelle sicher, dass die Beleuchtung im gesamten Sichtfeld des Sensors gleichmäßig ist. Siehe auch: Drohnen-LED-Systeme
- Ergänzende Systeme: Integration mit anderen Positionierungssystemen. Meine fortgeschrittenen Aufbauten verwenden mehrere Positionierungssysteme mit sorgfältig kalibrierten Versätzen zwischen den Sensoren.
Softwarekonfiguration
Einrichtung des Flugcontrollers
- Optischen Fluss aktivieren: In der Firmware des Flugcontrollers aktivieren. Jede Firmware hat unterschiedliche Einstellungen - ich dokumentiere die spezifischen Parameter für jeden meiner Aufbauten.
- Kalibrierung: Sensorspezifische Kalibrierungsverfahren. Eine ordnungsgemäße Kalibrierung macht einen erheblichen Unterschied in der Leistung - ich kalibriere nach jeder größeren Änderung am Aufbau neu.
- Parameteroptimierung:
- Skalierungsfaktoren: Anpassen basierend auf Sensormontage und Linseneigenschaften. Ich optimiere diese durch kontrollierte Flugtests.
- Filterung: Konfigurieren Sie eine geeignete Filterung zur Rauschunterdrückung. Die richtigen Filtereinstellungen hängen vom spezifischen Sensor und den Flugeigenschaften ab.
- Fusionseinstellungen: Parameter für die Integration mit anderen Sensoren. Diese Einstellungen richtig zu wählen ist entscheidend für eine reibungslose Sensorfusion.
- Flugmodi: Konfigurieren Sie Positionshalten und verwandte Modi. Ich erstelle benutzerdefinierte Flugmodi, die für den optischen Flussbetrieb optimiert sind.
Testen und Validierung
- Statische Tests: Überprüfen Sie die Sensorwerte im stationären Zustand. Ich prüfe vor Flugtests auf Drift und Rauschen in den Positionsschätzungen.
- Bewegungstests: Kontrollierte Bewegung zur Überprüfung der Verfolgung. Ich verwende einen systematischen Ansatz, um die Verfolgung in verschiedene Richtungen und Geschwindigkeiten zu testen.
- Höhenreaktion: Überprüfen Sie die Skalierung in verschiedenen Höhen. Ich teste, wie sich die Positionsgenauigkeit mit der Höhe ändert, um optimale Betriebsbereiche zu bestimmen.
- Tests unter Lichtbedingungen: Leistung bei verschiedenen Lichtverhältnissen. Ich teste Übergänge zwischen verschiedenen Lichtbedingungen, um mögliche Probleme zu identifizieren.

Fehlerbehebung bei Problemen mit dem optischen Fluss
Selbst die besten optischen Flusssysteme können Probleme entwickeln. So diagnostiziere und behebe ich häufige Probleme:
Häufige Probleme und Lösungen
Schlechtes Positionshalten
Symptome:
- Drift trotz aktivem optischen Fluss. Ich habe dies erlebt, wenn ich über Oberflächen mit unzureichender Textur geflogen bin.
- Inkonsistente Leistung. Dies deutet oft auf Kalibrierungsprobleme oder den Betrieb außerhalb des optimalen Bereichs des Sensors hin.
Lösungen:
- Überprüfen Sie die Oberflächentextur und Beleuchtung. Ich trage eine strukturierte Matte für das Fliegen über problematischen Oberflächen bei mir.
- Stellen Sie sicher, dass die Höhe innerhalb des effektiven Bereichs des Sensors liegt. Ich habe eine Referenztabelle mit optimalen Höhenbereichen für jeden meiner Sensoren erstellt.
- Kalibrieren Sie den Sensor neu und überprüfen Sie die Ausrichtung. Ich führe eine vollständige Neukalibrierung durch, wenn ich eine Leistungsverschlechterung feststelle.
- Passen Sie die EKF- oder Positionsregler-Parameter an. Die Feinabstimmung dieser Parameter kann die Leistung bei anspruchsvollen Oberflächen erheblich verbessern.
Erratische Bewegungen oder "Zucken"
Symptome:
- Plötzliche Positionskorrekturen. Ich habe dies gesehen, wenn der Sensor kurzzeitig die Verfolgung verliert und wiederaufnimmt.
- Schwingungen beim Positionshalten. Dies deutet typischerweise auf Probleme bei der Reglereinstellung oder Verzögerungen in den optischen Flussdaten hin.
Lösungen:
- Überprüfen Sie, ob Vibrationen den Sensor beeinträchtigen. Ich habe viele "Zuck"-Probleme durch Verbesserung der Vibrationsisolierung gelöst.
- Passen Sie die Verstärkungen des Positionsreglers an. Geringere Verstärkungen führen oft zu einem sanfteren, aber weniger präzisen Positionshalten.
- Erhöhen Sie die Filterung der optischen Flussdaten. Ich wäge die Filterung gegen die Latenz ab - zu viel Filterung verursacht ihre eigenen Probleme.
- Stellen Sie eine konsistente Beleuchtung sicher. Ich habe erratisches Verhalten auf Schatten oder Lichtmuster zurückgeführt, die sich über das Sichtfeld bewegen.
Vollständiger Verfolgungsverlust
Symptome:
- Der Positionshaltungsmodus versagt vollständig. Dies ist normalerweise offensichtlich, da die Drohne beginnt, erheblich abzudriften.
- Der Sensor zeigt keine Bewegungserkennung. Ich überprüfe die Diagnosedaten, um zu bestätigen, ob der Sensor überhaupt Bewegungen erkennt.
Lösungen:
- Überprüfen Sie die Sensorverbindungen und die Stromversorgung. Intermittierende Verbindungen haben in meiner Erfahrung zahlreiche Tracking-Ausfälle verursacht.
- Stellen Sie sicher, dass die Oberfläche ausreichend Textur aufweist. Ich vermeide es, über einheitliche Oberflächen zu fliegen oder trage eine strukturierte Landematte.
- Sorgen Sie für ausreichende Beleuchtung oder Ausleuchtung. Ich habe zusätzliche Beleuchtungssysteme für Drohnen hinzugefügt, die häufig bei schwachem Licht betrieben werden.
- Testen Sie den Sensor mit bekannten guten Oberflächen. Ich verwende ein standardisiertes Testmuster, um die Sensorfunktionalität zu überprüfen.
Diagnostische Ansätze
- Datenprotokollierung: Analysieren Sie Flugprotokolle auf Sensorleistung. Ich habe durch sorgfältige Protokollanalyse unzählige Probleme identifiziert.
- Echtzeit-Überwachung: Anzeigen von Sensordaten während des Betriebs. Bei komplexen Problemen richte ich eine Echtzeit-Telemetrie ein, um das Sensorverhalten zu beobachten.
- Systematisches Testen: Isolieren Sie Variablen, um spezifische Probleme zu identifizieren. Ich ändere jeweils einen Parameter, um genaue Ursache-Wirkungs-Beziehungen zu bestimmen.
- Vergleichstests: Testen Sie mit bekannter guter Hardware. Ich pflege einen "Referenz"-Optical-Flow-Aufbau für Vergleichstests.
Fortgeschrittene Anwendungen und Techniken
Für erfahrene Benutzer, die das Potenzial von Optical-Flow-Systemen maximieren möchten, bieten diese fortgeschrittenen Konzepte tiefere Einblicke.
Sensor-Fusion-Ansätze
Kombination von optischem Fluss mit anderen Positionierungsdaten:
- EKF (Extended Kalman Filter): Ausgeklügelter Algorithmus für Sensorfusion. Ich habe festgestellt, dass eine ordnungsgemäße EKF-Abstimmung einen dramatischen Unterschied in der Positionsstabilität bewirkt.
- Komplementärfilter: Einfacherer Ansatz für grundlegende Sensorfusion. Für weniger leistungsfähige Flugsteuerungen verwende ich manchmal diesen Ansatz anstelle von EKF.
- Gewichtete Mittelwertbildung: Grundlegende Fusionstechnik für ähnliche Sensortypen. Ich habe dies erfolgreich verwendet, wenn ich mehrere Optical-Flow-Sensoren kombiniert habe.
- Fallback-Hierarchien: Priorisierung verschiedener Sensoren basierend auf Bedingungen. Meine fortgeschrittenen Builds wechseln automatisch zwischen Positionierungssystemen basierend auf ihrer Zuverlässigkeit unter den aktuellen Bedingungen.
Indoor-Kartierung und Navigation
Verwendung von optischem Fluss als Teil der umfassenden Indoor-Navigation:
- SLAM-Integration: Simultane Lokalisierung und Kartierung mit optischem Fluss. Ich habe experimentelle Drohnen gebaut, die Karten von Innenräumen erstellen, während sie durch sie navigieren.
- Pfadplanung: Autonome Routenbestimmung in GPS-freien Umgebungen. Meine fortgeschrittenen Builds können komplexe Innenräume ohne vorprogrammierte Pfade navigieren.
- Positionsspeicherung: Speichern von Standorten basierend auf der Optical-Flow-Positionierung. Ich verwende dies für die Funktion "Rückkehr zum Start" in Innenräumen.
- Mehrstöckige Navigation: Handhabung vertikaler Übergänge zwischen Ebenen. Dies bleibt eine Herausforderung, aber ich hatte Erfolg mit der Integration des Luftdrucks für Etagenübergänge.
Benutzerdefinierte Anwendungen
Spezialisierte Anwendungen, die ich für die Optical-Flow-Technologie entwickelt habe:
- Präzisionsschwebezustand: Ultrastabile Positionshaltung für Inspektionsaufgaben. Ich habe eine Positionsstabilität im Subzentimeterbereich über längere Zeiträume erreicht.
- Relative Bewegungsbefehle: Bewegung präziser Entfernungen ohne absolute Positionierung. Dies ist besonders nützlich für automatisierte Inspektionsroutinen.
- Flussbasierte Odometrie: Entfernungsverfolgung ohne GPS. Ich habe dies zum Messen von Entfernungen in GPS-freien Umgebungen verwendet.
- Dynamische Oberflächenverfolgung: Aufrechterhaltung einer konstanten Höhe über unebenen Oberflächen. Durch die Kombination von optischem Fluss mit Präzisions-Lidar können meine Builds den Konturen unebener Oberflächen folgen.
Zukünftige Trends in der Optical-Flow-Technologie
Die Optical-Flow-Landschaft entwickelt sich ständig weiter. Basierend auf meinen Tests mit modernsten Komponenten und Diskussionen mit Herstellern, sehe ich folgende Entwicklungen:
Hardware-Fortschritte
- Höhere Auflösungssensoren: Detailliertere Bildgebung für besseres Tracking. Ich habe Prototyp-Sensoren mit der 4-fachen Auflösung aktueller Modelle getestet, mit beeindruckenden Verbesserungen der Tracking-Präzision.
- Global-Shutter-Kameras: Beseitigung von Bewegungsunschärfe für besseres Tracking bei schnellen Bewegungen. Der Unterschied in der Hochgeschwindigkeitsleistung ist bemerkenswert - ich erwarte, dass diese zum Standard werden.
- Spezialisierte KI-Prozessoren: Dedizierte Hardware für die Bildverarbeitung. Die Prototypen, die ich mit KI-Beschleunigung getestet habe, zeigen eine deutlich verbesserte Verfolgung unter schwierigen Bedingungen.
- Miniaturisierung: Kleinere, leichtere Sensoren mit besserer Leistung. Jede Generation wird kleiner und leistet gleichzeitig mehr - entscheidend für gewichtsempfindliche Anwendungen.
- Multidirektionale Systeme: Optischer Fluss in mehrere Richtungen gleichzeitig. Ich bin besonders gespannt auf Systeme, die Bewegungen in alle Richtungen verfolgen können, nicht nur nach unten.
Software-Innovationen
- KI-gestütztes Tracking: Maschinelles Lernen verbessert die Merkmalserkennung und -verfolgung. Frühe Implementierungen, die ich getestet habe, können das Tracking auf Oberflächen aufrechterhalten, die traditionelle Algorithmen völlig verwirren.
- Adaptive Algorithmen: Selbstabstimmung basierend auf Oberflächen- und Beleuchtungsbedingungen. Diese Systeme passen die Parameter automatisch an die aktuellen Bedingungen an und halten so eine optimale Leistung aufrecht.
- Prädiktive Bewegung: Antizipation von Bewegungsmustern für besseres Tracking. Durch die Vorhersage von Bewegungen halten diese Systeme das Tracking auch bei kurzzeitiger Sensorverdeckung aufrecht.
- Semantisches Verständnis: Erkennen von Oberflächentypen für optimiertes Tracking. Anstatt nur Merkmale zu verfolgen, verstehen diese Systeme, was sie sehen, und passen sich entsprechend an.
Integrationstrends
- Engere Sensorfusion: Anspruchsvollere Integration mit anderen Positionierungssystemen. Die Grenzen zwischen verschiedenen Positionierungstechnologien verschwimmen mit der Verbesserung der Fusionsalgorithmen.
- Standardisierte Schnittstellen: Gemeinsame Protokolle für Optical-Flow-Daten. Dies wird es erleichtern, verschiedene Sensoren mit verschiedenen Flugsteuerungen zu integrieren.
- Verbraucherzugänglichkeit: Erschwinglichere Systeme mit besserer Leistung. Die Technologie wird für Hobbyisten und kleine gewerbliche Betreiber schnell zugänglicher.
- Regulatorische Anerkennung: Formale Akzeptanz von optischem Fluss für redundante Navigation. Ich erwarte, dass Luftfahrtbehörden diese Systeme zunehmend als gültige Positionierungsbackups anerkennen werden.
Profi-Tipps aus meiner Erfahrung
Nach Tausenden von Flügen mit Dutzenden von Optical-Flow-Konfigurationen, hier einige meiner hart erarbeiteten Erkenntnisse, die Sie nicht in den Handbüchern finden werden:
- Nehmen Sie eine strukturierte Landematte mit: Ich habe immer eine kleine Matte mit kontrastreichem Muster für Start und Landung auf problematischen Oberflächen dabei. Dies stellt ein zuverlässiges Tracking während der kritischsten Flugphasen sicher.
- Testen Sie neue Umgebungen vor kritischen Flügen: Ich führe einen einfachen Schwebetest in jeder neuen Umgebung durch, bevor ich komplexe Manöver oder autonome Missionen versuche. Dies deckt schnell alle Tracking-Probleme mit der spezifischen Oberfläche oder Beleuchtung auf.
- Halten Sie die Beleuchtung während des Fluges konstant: Plötzliche Änderungen der Beleuchtung können optische Flusssensoren verwirren. Ich versuche, während kritischer Operationen eine konstante Beleuchtung beizubehalten und mich Beleuchtungsübergängen langsam zu nähern.
- Reinigen Sie Ihre Sensoren regelmäßig: Staub oder Verschmutzungen auf der Sensorlinse können die Leistung erheblich beeinträchtigen. Ich reinige alle optischen Sensoren vor wichtigen Flügen mit geeigneten Techniken zur Reinigung von Kameraobjektiven.
- Kalibrieren Sie nach Temperaturänderungen: Ich habe festgestellt, dass signifikante Temperaturänderungen die Sensorkalibrierung beeinflussen können. Ich kalibriere neu, nachdem ich mich zwischen Umgebungen mit großen Temperaturunterschieden bewegt habe.
- Verwenden Sie den optischen Fluss als Teil eines redundanten Systems: Ich verlasse mich bei kritischen Anwendungen niemals ausschließlich auf den optischen Fluss. Meine professionellen Aufbauten enthalten immer mehrere Positionierungstechnologien, die sich gegenseitig überprüfen können.
- Protokollieren und analysieren Sie Flugdaten: Ich überprüfe regelmäßig Flugprotokolle, um potenzielle Probleme zu erkennen, bevor sie zu Problemen werden. Eine allmähliche Verschlechterung der Tracking-Qualität zeigt sich oft in Protokollen, bevor sie im Flug bemerkbar wird.
- Passen Sie Parameter für bestimmte Umgebungen an: Ich pflege verschiedene Parametersätze, die für verschiedene Flugumgebungen optimiert sind. Was in Innenräumen perfekt funktioniert, ist möglicherweise nicht optimal für Flüge im Freien unter Bäumen.
- Testen Sie die Genauigkeit des Höhensensors unabhängig: Ungenaue Höhendaten beeinträchtigen die Leistung des optischen Flusses. Ich überprüfe die Genauigkeit des Höhensensors separat, bevor ich Probleme mit dem optischen Fluss behebe.
- Berücksichtigen Sie die Reflektivität der Oberfläche: Stark reflektierende oder transparente Oberflächen können optische Flusssensoren verwirren. Ich vermeide es, über Glas, Wasser oder hochglanzpolierte Oberflächen zu fliegen, wenn ich mich auf den optischen Fluss verlasse.
FAQ: Häufige Fragen zu optischen Flusssensoren
Wie schneidet der optische Fluss im Vergleich zu GPS bei der Positionshaltung ab?
Basierend auf meinen umfangreichen Tests unter verschiedenen Bedingungen:
- Genauigkeit: Unter optimalen Bedingungen kann ein hochwertiger optischer Fluss tatsächlich eine präzisere Positionshaltung bieten als Consumer-GPS. Ich habe mit guten optischen Flusssystemen eine Positionshaltungsgenauigkeit von 2-3 cm gemessen, verglichen mit 1-2 Metern bei Standard-GPS.
- Zuverlässigkeit: GPS ist in verschiedenen Umgebungen konsistenter, versagt aber in Innenräumen oder unter Abdeckungen. Optischer Fluss funktioniert in GPS-freien Umgebungen, ist aber empfindlicher gegenüber Oberflächenbedingungen und Beleuchtung.
- Drifteigenschaften: Die GPS-Position tendiert dazu, langsam innerhalb eines Radius von 1-2 Metern zu wandern. Der Drift des optischen Flusses ist auf guten Oberflächen meist minimal, kann aber auf herausfordernden Oberflächen plötzlich vollständig versagen.
- Komplementäre Nutzung: Ich erhalte die besten Ergebnisse, wenn ich beide Systeme zusammen verwende, wobei der Flugcontroller ihre Eingaben intelligent auf der Grundlage der Bedingungen gewichtet. Dies bietet GPS-Zuverlässigkeit mit optischer Flusspräzision, wenn die Bedingungen für beide günstig sind.
Meiner Erfahrung nach ist der optische Fluss kein Ersatz für GPS, sondern eine komplementäre Technologie, die sich in verschiedenen Umgebungen auszeichnet.
Weitere detaillierte Informationen zur GPS-Positionierung finden Sie unter:
GNSS-Technologie
Welche Oberflächen funktionieren am besten mit optischen Flusssensoren?
Die Oberflächeneigenschaften wirken sich dramatisch auf die Leistung des optischen Flusses aus:
- Ideale Oberflächen: Strukturierte, nicht reflektierende Oberflächen mit kontrastreichen Mustern. Ich erhalte die beste Leistung auf Oberflächen wie strukturiertem Teppich, Asphalt oder Gras.
- Problematische Oberflächen: Einheitliche, strukturlose Oberflächen wie glatter Beton, stehendes Wasser oder Glas. Ich habe auf diesen Oberflächen ein vollständiges Tracking-Versagen erlebt.
- Mäßig herausfordernd: Sich wiederholende Muster oder kontrastarme Oberflächen. Diese können funktionieren, aber mit reduzierter Leistung - ich überwache die Positionshaltung sorgfältiger, wenn ich über diese fliege.
- Oberflächenbewegung: Sich bewegende Oberflächen wie Wasser mit Wellen oder Laub, das sich im Wind bewegt. Moderne Sensoren bewältigen diese besser als ältere, aber sie stellen immer noch Herausforderungen dar.
Ich trage eine kleine strukturierte Matte für Start und Landung auf problematischen Oberflächen bei mir, was ein gutes Tracking während dieser kritischen Phasen gewährleistet.
Was ist die maximale Höhe für einen zuverlässigen optischen Flussbetrieb?
Die Höhenbegrenzungen variieren erheblich zwischen den Sensoren:
- Grundlegende Sensoren (PMW3901): In meinen Tests typischerweise bis zu 2-3 Meter effektiv. Die Leistung nimmt über diese Höhe hinaus rapide ab.
- Fortschrittliche eigenständige Sensoren: Qualitätssensoren wie PX4FLOW halten nach meiner Erfahrung ein gutes Tracking bis zu 5-8 Metern aufrecht.
- Integrierte kommerzielle Systeme: Die besten Systeme von DJI und Skydio haben in meinen Tests bis zu 10-12 Meter ein zuverlässiges Tracking beibehalten.
- Faktoren, die die maximale Höhe beeinflussen:
- Sensorauflösung und -qualität
- Linseneigenschaften
- Oberflächenstruktur
- Beleuchtungsbedingungen
- Rechenleistung
Ich teste und dokumentiere immer den effektiven Höhenbereich für jede meiner mit optischem Fluss ausgestatteten Drohnen und bleibe während des Betriebs innerhalb dieser Grenzen.
Kann der optische Fluss im Freien funktionieren?
Ja, aber mit wichtigen Überlegungen:
- Oberflächenanforderungen: Benötigt immer noch strukturierte Oberflächen. Ich erhalte eine hervorragende Leistung im Freien über Gras, Erde oder Asphalt, aber schlechte Ergebnisse über Wasser oder Schnee.
- Beleuchtungsherausforderungen: Direktes Sonnenlicht kann einige Sensoren überfordern, während andere gut damit umgehen. Ich habe festgestellt, dass Sensoren mit gutem Dynamikumfang und automatischer Belichtungsanpassung im Freien besser funktionieren.
- Windeffekte: Starker Wind kann die Höhenstabilität beeinflussen, was sich auf die Genauigkeit des optischen Flusses auswirkt. Ich achte bei der Verwendung des optischen Flusses unter windigen Bedingungen besonders auf die Höhenhaltung.
- Komplementäre Nutzung: Im Freien verwende ich den optischen Fluss typischerweise als Ergänzung zu GPS und nicht als Ersatz. Dies bietet Redundanz und verbesserte Präzision, wenn beide Systeme gut funktionieren.
Einige meiner besten Leistungen mit optischem Fluss habe ich tatsächlich im Freien in Gebieten mit teilweiser Baumbedeckung erzielt - genug Struktur für ein gutes Tracking, aber nicht genug GPS-Signal für eine zuverlässige Satellitenpositionierung.
Wie wirken sich die Lichtverhältnisse auf die Leistung aus?
Die Beleuchtung hat einen erheblichen Einfluss auf die Leistung des optischen Flusses:
- Optimale Beleuchtung: Moderate, gleichmäßige Beleuchtung ohne harsche Schatten. Unter diesen Bedingungen erhalte ich die zuverlässigste Leistung.
- Schwaches Licht: Sensoren mit guter IR-Beleuchtung können die Leistung bei schwachem Licht aufrechterhalten. Ich bin mit Sensoren, die über leistungsstarke IR-Beleuchtung verfügen, erfolgreich bei nahezu dunklen Bedingungen geflogen.
- Wechselndes Licht: Übergänge zwischen verschiedenen Lichtverhältnissen können Sensoren vorübergehend verwirren. Ich nähere mich diesen Übergängen langsam, um dem Sensor Zeit zur Anpassung zu geben.
- Direktes Sonnenlicht: Kann einige Sensoren überfordern oder harsche Schatten erzeugen, die das Tracking beeinträchtigen. Ich habe festgestellt, dass Sensoren mit globalem Shutter und gutem Dynamikumfang viel besser mit Sonnenlicht umgehen können.
- Künstliche Beleuchtung: Einige Arten von künstlicher Beleuchtung können aufgrund von Flimmern Probleme verursachen. Ich habe Tracking-Probleme unter bestimmten LED- und Leuchtstofflampen festgestellt, die mit Frequenzen flimmern, die die Bildrate des Sensors stören.
Wie wichtig ist der Höhensensor für den optischen Fluss?
Der Höhensensor ist für einen genauen optischen Flussbetrieb absolut entscheidend:
- Skalierungsfaktor: Der optische Fluss misst nur die Pixelbewegung - Höhendaten sind erforderlich, um diese in die reale Entfernung umzurechnen. Ich habe gesehen, dass Positionsfehler mit zunehmender Ungenauigkeit der Höhenmessung exponentiell ansteigen.
- Technologieoptionen: Barometrisch (am ungenauesten), Ultraschall (mittel) und Lidar (am genauesten). Nach umfangreichen Tests verwende ich aufgrund der überlegenen Genauigkeit ausschließlich Lidar für ernsthafte Anwendungen.
- Fehlerfortpflanzung: Kleine Höhenfehler verursachen große Positionsfehler. In meinen Tests führt ein Höhenmessfehler von 10 % typischerweise zu einem Positionsfehler von mindestens 10 %, oft mehr.
- Oberflächenvariationen: Unebene Oberflächen können einfachere Höhensensoren verwirren. Ich habe festgestellt, dass Lidar viel besser mit variierendem Gelände zurechtkommt als Ultraschallsensoren.
Ich halte den Höhensensor für genauso wichtig wie den optischen Flusssensor selbst - das Upgrade von Ultraschall auf Lidar hat die Positionshaltung in mehreren meiner Builds stärker verbessert als das Upgrade des optischen Flusssensors.
Kann optischer Fluss GPS für autonomen Flug ersetzen?
Basierend auf meinen Erfahrungen mit verschiedenen autonomen Systemen:
- Betrieb in begrenztem Bereich: Ja, optischer Fluss kann vollständig autonomen Flug in begrenzten Räumen ermöglichen. Ich habe komplexe autonome Innenrouten programmiert, die zuverlässig ausgeführt werden.
- Erweiterter Betrieb: Nicht empfohlen als alleiniges Positionierungssystem. Positionsfehler akkumulieren sich mit der Zeit und Entfernung - ich habe nach längerem Flug mit nur optischem Fluss eine Drift von mehreren Metern gemessen.
- Hybride Ansätze: Die besten Ergebnisse werden durch die Kombination von optischem Fluss mit anderen Positionierungssystemen erzielt. Meine zuverlässigsten autonomen Builds verwenden optischen Fluss zusammen mit GPS, barometrischem Druck und anderen Sensoren mit ausgefeilten Fusionsalgorithmen.
- Kommerzielle Implementierung: High-End-Systeme wie die von DJI und Skydio verwenden optischen Fluss als Teil umfassender Navigationssysteme. Diese bieten beeindruckende autonome Fähigkeiten auch in GPS-freien Umgebungen.
Für kritische autonome Operationen verlasse ich mich nie ausschließlich auf optischen Fluss - die Technologie funktioniert am besten als Teil eines redundanten Positionierungssystems.
Fazit
Optische Flusssensoren haben die Art und Weise, wie Drohnen in GPS-freien Umgebungen operieren, verändert. Nach Jahren des Testens und Implementierens verschiedener optischer Flusssysteme habe ich gelernt, wie viel diese oft übersehenen Komponenten zu einem stabilen, präzisen Flug in Innenräumen beitragen.
Das Verständnis der Technologie des optischen Flusses, der Implementierungsmethoden und der Best Practices für das Setup ermöglicht es Ihnen, Ihre Drohne für eine zuverlässige Positionshaltung in anspruchsvollen Umgebungen zu optimieren. Ich habe gesehen, wie Piloten mit instabilem Flug in Innenräumen kämpfen, ohne zu erkennen, dass die Hinzufügung eines geeigneten optischen Flusssystems ihre Probleme vollständig lösen könnte.
Die Technologie entwickelt sich rasant weiter, wobei anspruchsvollere Sensoren und Verarbeitungsalgorithmen eine zunehmend zuverlässige Leistung unter einer breiteren Palette von Bedingungen ermöglichen. Durch die Auswahl des richtigen optischen Flusssystems und dessen ordnungsgemäße Implementierung erreichen Sie einen stabilen, präzisen Flug auch in Umgebungen, in denen kein GPS verfügbar ist.
Egal, ob Sie Ihre erste positionshaltende Drohne oder Ihre fünfzigste bauen, die Beachtung der Auswahl und Einrichtung des optischen Flusssensors wird sich in Flugstabilität und Zuverlässigkeit auszahlen. Ich habe viele dieser Lektionen auf die harte Tour gelernt - durch instabile Flüge, unerwartetes Driften und stundenlange Fehlersuche. Hoffentlich kann meine Erfahrung Ihnen helfen, einige dieser schmerzhaften Lektionen zu vermeiden und das Beste aus Ihrem Positionshaltungssystem herauszuholen.


