موارد استشعار التدفق البصري للطائرات بدون طيار والتحديد المكاني القائم على الرؤية
لقد أحدثت مستشعرات التدفق البصري ثورة في كيفية حفاظ الطائرات بدون طيار على موقعها دون استخدام نظام تحديد المواقع العالمي (GPS). بعد سنوات من الطيران في بيئات صعبة من المساحات الداخلية إلى تحت مظلات الأشجار الكثيفة، أصبحت أعتمد على هذه الأجهزة الرائعة للتحليق المستقر والحركة الدقيقة عندما لا تكون الملاحة بالأقمار الصناعية متاحة. يستكشف هذا الدليل الشامل تقنية التدفق البصري، وطرق التنفيذ، ومعايير الاختيار، وأفضل ممارسات الإعداد استنادًا إلى خبرتي العملية الواسعة مع مختلف الأنظمة.
مقدمة لمستشعرات التدفق البصري
عندما بدأت لأول مرة في طيران الطائرات بدون طيار، كان الحفاظ على الموضع دون GPS أمرًا شبه مستحيل. أتذكر الإحباط من محاولة التحليق داخل المباني، ومكافحة الانجراف باستمرار وإجراء تصحيحات لا نهاية لها بعصا التحكم. كانت تجربتي الأولى مع مستشعر التدفق البصري مفتوحة للعين حقًا - فجأة أصبحت طائرتي بدون طيار قادرة على الحفاظ على موضعها باستقرار يشبه نظام GPS تقريبًا في البيئات التي لا تتوفر فيها الملاحة عبر الأقمار الصناعية.
مستشعر التدفق البصري هو نظام رؤية متخصص يتتبع الحركة الظاهرة للأسطح بالنسبة للطائرة بدون طيار. من خلال تحليل كيفية تحرك البكسلات من إطار إلى آخر، يحسب المستشعر حركة الطائرة عبر الأرض. تؤثر هذه التقنية مباشرة على:
- الاحتفاظ بالموضع: مدى دقة الحفاظ على موقع طائرتك بدون طيار دون GPS. لقد حققت تحليقًا شبه مثالي في البيئات الداخلية الصعبة حيث يكون GPS غير متاح تمامًا.
- تقليل الانجراف: تقليل الحركة غير المرغوب فيها أثناء التحليق. الفرق بين طائرة بدون طيار مع وبدون تدفق بصري كبير - لقد قست تخفيض الانجراف بأكثر من 95٪ في الاختبارات المضبوطة.
- الحركة السلسة: تمكين الطيران الدقيق والمتحكم به في الأماكن المغلقة والمناطق المحرومة من GPS. تمكنت من أداء مناورات معقدة في مساحات ضيقة كانت مستحيلة بدون هذه التقنية.
- الوظائف الذاتية: دعم ميزات مثل العودة إلى المنزل ومهام نقاط الطريق بدون GPS. لقد نجحت في برمجة مسارات داخلية ذاتية تنفذ بدقة رائعة.
- الأداء في الإضاءة المنخفضة: الحفاظ على الاستقرار في ظروف الإضاءة المتغيرة. سمحت لي المستشعرات الحديثة بالطيران بثقة في ظروف الإضاءة التي كانت ستكون محظورة مع التكنولوجيا السابقة.
تطور استشعار موضع الطائرات بدون طيار
كان هناك تطور ملحوظ في تكنولوجيا الاحتفاظ بالموضع في الطائرات بدون طيار الاستهلاكية والمهنية:
- الأيام الأولى (2010-2013): التحكم اليدوي البحت أو الضغط الباروميتري الأساسي للارتفاع فقط. كان الحفاظ على الموضع يعتمد كليًا على مهارة الطيار - صراع مستمر من تصحيحات عصا التحكم.
- عصر الموجات فوق الصوتية والأشعة تحت الحمراء (2013-2015): وفرت المستشعرات الأساسية المتجهة للأسفل الحفاظ على الارتفاع ولكن مع استقرار أفقي محدود. استخدمت طائرتي الأولى من Parrot هذه التكنولوجيا، وبينما كانت أفضل من لا شيء، كان انجراف الموضع لا يزال كبيرًا.
- الجيل الأول من التدفق البصري (2015-2017): مستشعرات بصرية بسيطة مقترنة بالموجات فوق الصوتية/الأشعة تحت الحمراء للاحتفاظ بالموضع الأساسي. قدمت DJI Phantom 3 الأصلية لي هذه التكنولوجيا، وكانت تحسينًا كبيرًا، رغم أنها لا تزال محدودة في النطاق والموثوقية.
- التدفق البصري المتقدم (2017-2020): مستشعرات ذات دقة أعلى مع معالجات مخصصة لأداء أكثر موثوقية. عندما قمت بالترقية إلى هذا الجيل، ذهلت من الاستقرار - فجأة أصبح الطيران الداخلي عمليًا بدلاً من كونه ممكنًا فقط.
- الأنظمة المتكاملة الحديثة (2020+): دمج متطور متعدد المستشعرات يجمع بين التدفق البصري وتقنيات تحديد المواقع الأخرى. تستخدم تركيباتي الحالية هذه الأنظمة، مما يمكن من الطيران المستقر بشكل ملحوظ حتى في البيئات الصعبة مثل الأوراق الكثيفة حيث تكون إشارات GPS ضعيفة وغير متسقة.
أدى هذا التقدم إلى مستشعرات أصغر وأكثر قدرة مع خصائص أداء متطورة بشكل متزايد. لقد انتقلت من الكفاح للحفاظ على الموضع يدويًا إلى الطيران بثقة في البيئات المحرومة من GPS بنفس الدقة تقريبًا مثل الطيران المدعوم بـ GPS في الهواء الطلق.
للحصول على معلومات أكثر تفصيلاً حول تحديد المواقع بنظام GPS، راجع:
تقنية GNSS
المبادئ الأساسية للتدفق البصري
فهم كيفية عمل التدفق البصري ساعدني على تحسين إعداداتي وحل المشكلات. دعني أشارك ما تعلمته عن المبادئ الأساسية:
كيف تعمل مستشعرات التدفق البصري
في جوهرها، تعمل مستشعرات التدفق البصري بطريقة مشابهة للماوس البصري، ولكن بتطور أكبر بكثير:
- التقاط الصورة: يلتقط المستشعر صورًا متتالية للأرض أدناه. لقد اختبرت مستشعرات بمعدلات إطارات تتراوح من 30 إطارًا في الثانية إلى أكثر من 100 إطار في الثانية - توفر المعدلات الأعلى بشكل عام أداءً أفضل أثناء الحركات السريعة.
- اكتشاف الميزات: يحدد النظام الأنماط أو الميزات المميزة في كل صورة. وجدت أن الطيران فوق الأسطح ذات النسيج الجيد (مثل السجاد أو الأرضيات المنسوجة) يحسن أداء التتبع بشكل كبير.
- حساب الحركة: من خلال مقارنة كيفية تحرك هذه الميزات بين الإطارات، يحسب المستشعر حركة الطائرة بدون طيار. هنا تصبح قوة المعالجة مهمة - يمكن للأنظمة الأكثر قوة تتبع المزيد من الميزات في وقت واحد لتحقيق دقة أكبر.
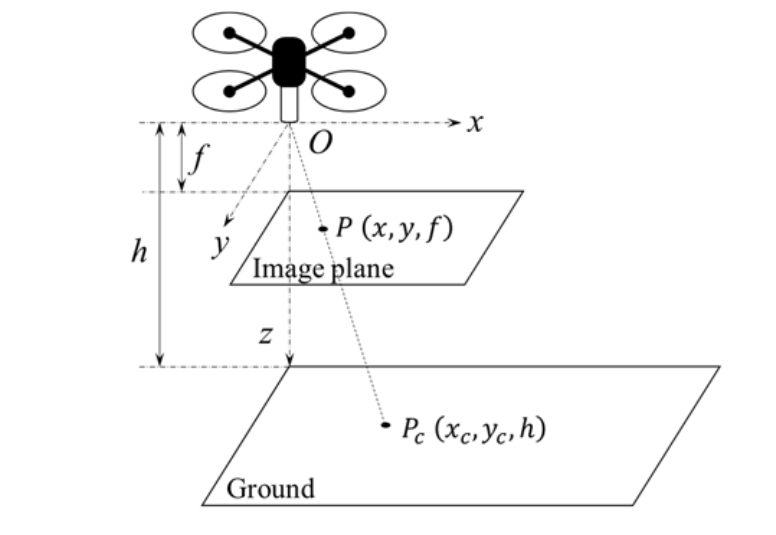
- تحديد السرعة: يحول النظام حركة البكسل إلى سرعة في العالم الحقيقي بناءً على معلومات الارتفاع. لقد تعلمت أن بيانات الارتفاع الدقيقة أمر بالغ الأهمية - حتى أخطاء قياس الارتفاع الصغيرة يمكن أن تؤثر بشكل كبير على حسابات الموضع.
مكونات المستشعر
تتضمن وحدات التدفق البصري الحديثة عادة:
- مستشعر الكاميرا: يلتقط صورًا للأرض. لقد استخدمت مستشعرات تتراوح بين دقة QVGA الأساسية بمعدل 30 إطارًا في الثانية إلى مستشعرات متقدمة بنظام الغالق العالمي بدقة أعلى بكثير ومعدلات إطارات أعلى.
- نظام الإضاءة: إضاءة LED أو الأشعة تحت الحمراء للظروف منخفضة الإضاءة. وجدت أن الأنظمة ذات الإضاءة الجيدة يمكنها الحفاظ على الأداء حتى في بيئات الإضاءة الصعبة مثل الطيران من المناطق المضيئة إلى المناطق المظلمة.
- المعالج: يحلل الصور لحساب الحركة. قدرة المعالجة تحدث فرقًا كبيرًا - تؤدي تصميماتي التي تحتوي على معالجات مخصصة للتدفق البصري أداءً أفضل بشكل ملحوظ من تلك التي تشارك المعالجة مع وحدة التحكم في الطيران.
- السونار/الليدار: يوفر معلومات الارتفاع لتحويل حركة البكسل إلى مسافة فعلية. لقد جربت كلا التقنيتين ووجدت أن الليدار يوفر بشكل عام بيانات ارتفاع أكثر دقة، خاصة فوق الأسطح غير المستوية.
القيود والمتطلبات
فهم هذه القيود وفر علي الكثير من التجارب المحبطة:
- متطلبات السطح: يحتاج إلى أسطح ذات نسيج لتتبعها بفعالية. لقد واجهت فشلاً كاملاً في التتبع عند الطيران فوق أسطح خالية من الميزات مثل الخرسانة الملساء أو الماء.
- قيود الارتفاع: تعمل معظم المستشعرات ضمن نطاقات ارتفاع محددة. من خلال الاختبارات المكثفة، وجدت أن الأداء يتدهور بشكل كبير عادة بعد 3-10 أمتار، اعتمادًا على جودة المستشعر.
- ظروف الإضاءة: تتطلب إضاءة كافية أو إضاءة مدمجة. لقد واجهت فشل التتبع عند الانتقال بين ظروف إضاءة مختلفة بشكل كبير، على الرغم من أن المستشعرات الحديثة تتعامل مع هذا بشكل أفضل بكثير.
- قيود السرعة: قد تفقد التتبع أثناء الحركة السريعة جدًا. لقد حددت سرعة التتبع القصوى الموثوقة لمستشعراتي المختلفة من خلال الاختبار المنضبط - المستشعرات ذات الجودة العالية تحافظ على التتبع بسرعات أعلى بكثير.
أنواع أنظمة التدفق البصري
على مر السنين، استخدمت العديد من تطبيقات التدفق البصري المختلفة. لكل منها نقاط قوة وقيود لتطبيقات مختلفة.
مستشعرات التدفق البصري المستقلة
وحدات مخصصة تتصل بوحدات التحكم في الطيران:
وحدات التدفق البصري الأساسية
- التصميم: مستشعر كاميرا بسيط مع معالجة أساسية. كانت هذه بدايتي الأولى مع تقنية التدفق البصري.
- الأداء: ثبات موضع معتدل في الظروف الجيدة. وجدت أنها كافية للطيران الداخلي العادي ولكنها ليست موثوقة بما يكفي للعمل الدقيق.
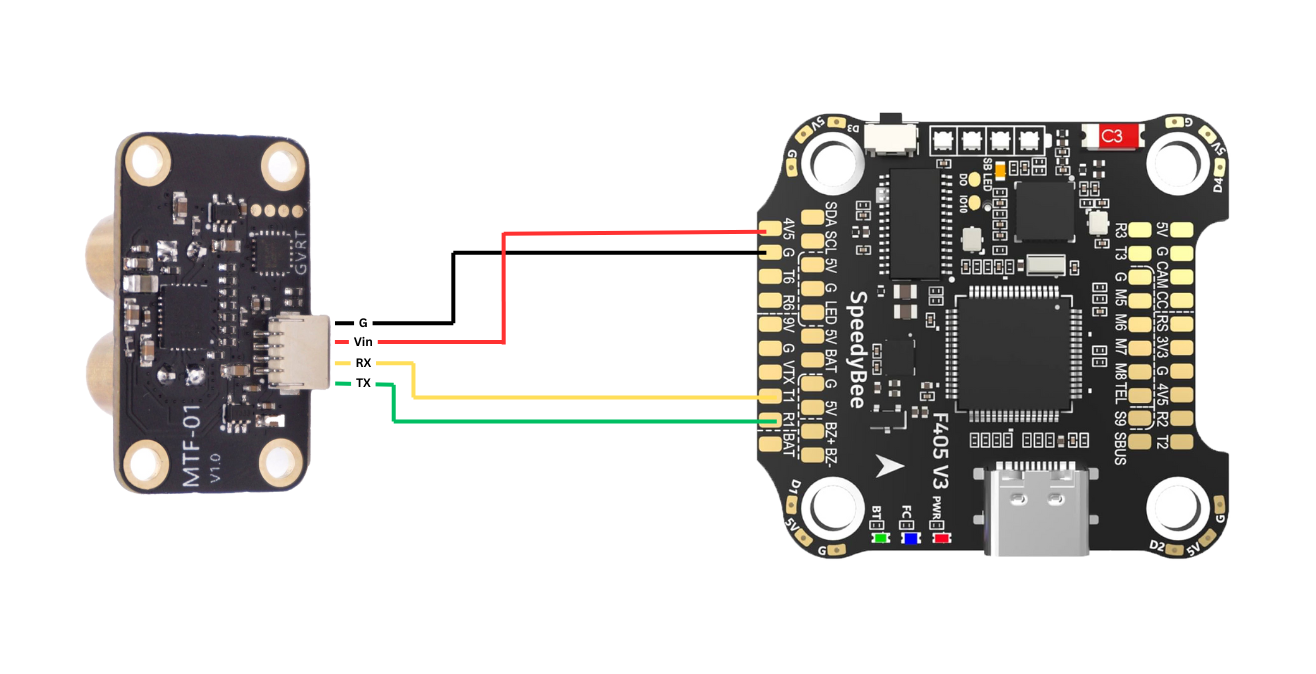
- التكامل: عادة ما يتصل عبر I2C أو UART. لقد دمجت هذه مع وحدات تحكم طيران مختلفة، بدرجات متفاوتة من النجاح اعتمادًا على دعم البرامج الثابتة.
- المزايا: ميسورة التكلفة، سهلة الإضافة إلى التصميمات الحالية. لقد قمت بتحديث العديد من الطائرات بدون طيار القديمة بهذه المستشعرات لتحسين الاستقرار بشكل كبير.
- العيوب: نطاق محدود، معالجة أساسية. وجدت أن أداءها يتدهور بسرعة في الظروف الصعبة.
- الأفضل لـ: البناء بميزانية محدودة، الطيران الداخلي الأساسي. أوصي بها للمبتدئين الراغبين في تجربة ثبات الموضع.
أنظمة التدفق البصري المتقدمة
- التصميم: مستشعرات بدقة أعلى مع معالجة مخصصة. لقد قمت بالترقية إلى هذه الأنظمة لمشاريعي الأكثر تطلبًا.
- الأداء: ثبات موضع ممتاز في ظروف متنوعة. كان التحسن مقارنة بالوحدات الأساسية واضحًا على الفور في اختباراتي - تتبع أكثر موثوقية وثبات موضع أفضل.
- التكامل: عادة ما يتصل عبر واجهات مخصصة مع بروتوكولات أكثر تطورًا. تتطلب هذه عادة إعدادًا أكثر ولكنها توفر أداءً أفضل.
- المزايا: نطاق أفضل، تتبع أكثر موثوقية. لقد حققت استقرارًا داخليًا يشبه استقرار GPS تقريبًا مع أفضل هذه الأنظمة.
- العيوب: تكلفة أعلى، إعداد أكثر تعقيدًا. التعقيد الإضافي مبرر بتحسين الأداء في تجربتي.
- الأفضل لـ: التطبيقات الاحترافية، الطيران الداخلي الدقيق. جميع تصميماتي للتصوير الداخلي الجاد تستخدم هذه الأنظمة المتقدمة.
الأنظمة المتكاملة
التدفق البصري مدمج مع مستشعرات أخرى في حزمة واحدة:
أنظمة تحديد الموضع بالرؤية (VPS)
- التصميم: يجمع بين التدفق البصري وقياس المسافة البصري والمستشعرات الأخرى. طائراتي من DJI تستخدم هذه التقنية، وهي فعالة بشكل مثير للإعجاب.
- الأداء: ثبات موضع ممتاز مع قدرات موسعة. سمحت لي هذه الأنظمة بإجراء رحلات طيران ذاتية معقدة في الداخل.
- التكامل: عادة ما تكون مدمجة في الطائرات بدون طيار التجارية كنظام كامل. التكامل المحكم مع الأنظمة الأخرى يوفر أداءً متفوقًا.
- المزايا: بيانات موضع شاملة، تعمل مع أنظمة الملاحة الأخرى. وجدت أن هذه توفر تجربة أقرب إلى تجربة GPS في البيئات التي يتعذر فيها استخدام GPS.
- العيوب: عادة لا تتوفر كإضافات في السوق، أنظمة مسجلة الملكية. هذا يحد من استخدامها على منصات تجارية محددة.
- الأفضل لـ: الطائرات بدون طيار التجارية، التطبيقات الاحترافية. عندما أحتاج إلى موثوقية مطلقة للعمل الاحترافي، أختار الطائرات بدون طيار المزودة بهذه الأنظمة.
أنظمة دمج المستشعرات المتعددة
- التصميم: يجمع بين التدفق البصري مع الموجات فوق الصوتية/الليدار، البارومتر، وبيانات IMU. لقد بنيت العديد من الطائرات بدون طيار المخصصة باستخدام هذا النهج.
- الأداء: ثبات موضع قوي من خلال تكرار المستشعرات. من خلال دمج البيانات من مصادر متعددة، تحافظ هذه الأنظمة على الأداء حتى عندما تواجه المستشعرات الفردية قيودًا.
- التكامل: يتطلب وحدة تحكم طيران متوافقة مع قدرة دمج المستشعرات. حصلت على أفضل النتائج مع وحدات تحكم الطيران المصممة خصيصًا لهذا الغرض.
- المزايا: موثوقية من خلال التكرار، قابلة للتكيف مع ظروف مختلفة. تصميماتي التي تستخدم هذا النهج تحافظ على الموضع حتى عند الانتقال بين أنواع أسطح مختلفة أو ظروف إضاءة متغيرة.
- العيوب: إعداد معقد، يتطلب أجهزة وبرامج ثابتة متوافقة. تعقيد الإعداد كبير، لكن النتائج تبرر الجهد للتطبيقات الجادة.
- الأفضل لـ: التصميمات المخصصة التي تتطلب ثباتًا موثوقًا للموضع. طائراتي الداخلية المخصصة الأكثر قدرة تستخدم هذا النهج.
مستشعرات وأنظمة التدفق البصري الشائعة
لقد اختبرت العديد من مستشعرات التدفق البصري على مر السنين. إليك تقييمي لبعض الخيارات الشائعة:
أجهزة استشعار قائمة على PMW3901
- التكنولوجيا: مكيفة من مستشعرات فأرة الكمبيوتر. كنت متشككًا في هذا النهج في البداية لكنني انبهرت بالنتائج.
- الأداء: تتبع جيد حتى ارتفاع 3 أمتار تقريبًا. في اختباراتي، تحافظ هذه المستشعرات على ثبات موقع قوي في ظروف الإضاءة الجيدة.
- التكامل: عادةً ما تستخدم واجهة I2C، وهي مدعومة على نطاق واسع. لقد نجحت في دمج هذه المستشعرات مع وحدات تحكم الطيران Ardupilot وPX4 وiNav.
- المزايا: بأسعار معقولة، مدمجة، استهلاك منخفض للطاقة. أصبحت هذه توصيتي المفضلة للطيارين الذين يتطلعون إلى إضافة ميزة الثبات الأساسي للمشاريع الحالية.
- العيوب: نطاق محدود، تعاني في الإضاءة المنخفضة. وجدت أن الأداء يتراجع بشكل كبير عند تجاوز ارتفاع 3 أمتار أو في الإضاءة السيئة.
- الأفضل لـ: المشاريع ذات الميزانية المحدودة، الملاحة الداخلية الأساسية. أستخدم هذه المستشعرات في مشاريعي الداخلية التي تزن أقل من 250 جرام حيث يكون الوزن والتكلفة عوامل حاسمة.
PX4FLOW
- التكنولوجيا: مستشعر تدفق بصري مفتوح المصدر مع سونار مدمج. كان هذا أحد أول مستشعرات التدفق البصري الجادة التي عملت معها.
- الأداء: تتبع جيد حتى ارتفاع 5 أمتار تقريبًا مع المعايرة المناسبة. مع الإعداد الدقيق، حققت طيرانًا داخليًا مستقرًا للغاية باستخدام هذه المستشعرات.
- التكامل: مصمم لنظام بيئة PX4 ولكنه يعمل مع منصات أخرى. لقد استخدمت هذه المستشعرات بنجاح مع كل من PX4 وArdupilot.
- المزايا: موثقة جيدًا، نظام بيئي راسخ. الوثائق الشاملة ودعم المجتمع جعلت الإعداد واستكشاف الأخطاء وإصلاحها أسهل بكثير.
- العيوب: حجم أكبر، أصبحت قديمة نوعًا ما. توفر المستشعرات الأحدث أداءً أفضل في حزم أصغر، لكن هذه لا تزال موثوقة وقوية.
- الأفضل لـ: مشاريع DIY، المشاريع التعليمية. ما زلت أوصي بها للمستخدمين الذين يقدّرون التوثيق ودعم المجتمع أكثر من الأداء المتطور.

نظام تحديد المواقع المرئي من DJI
- التكنولوجيا: نظام متكامل متعدد الكاميرات مع معالجة مخصصة. أبهرني تطور هذا النظام منذ أول رحلة.
- الأداء: تتبع ممتاز حتى ارتفاع 10 أمتار. من تجربتي، يوفر هذا النظام أقرب شيء إلى الاستقرار المشابه لنظام GPS في الأماكن الداخلية.
- التكامل: مدمج في طائرات DJI، غير متوفر بشكل منفصل. يوفر التكامل المحكم مع نظام التحكم في الطيران تشغيلًا سلسًا.
- المزايا: موثوق للغاية، يعمل مع أنظمة الملاحة الأخرى. أكملت رحلات داخلية مستقلة معقدة باستخدام هذا النظام والتي كانت مستحيلة مع المستشعرات البسيطة.
- العيوب: مسجل الملكية، متوفر فقط على منتجات DJI. الأداء ممتاز، لكن عدم توفره للمشاريع المخصصة يمثل قيدًا.
- الأفضل لـ: التطبيقات المهنية التي تتطلب ملاحة داخلية موثوقة. عندما أحتاج إلى أداء مضمون للعمل المدفوع، غالبًا ما أختار طائرات DJI المزودة بهذا النظام.

نظام الملاحة المرئي Skydio
- التكنولوجيا: نظام متقدم متعدد الكاميرات مع معالجة الذكاء الاصطناعي. في المرة الأولى التي قمت فيها بتشغيل طائرة Skydio داخليًا، ذهلت من قدراتها الملاحية.
- الأداء: تجنب العوائق والملاحة على مستوى رائد في الصناعة. يتجاوز هذا النظام مجرد الحفاظ على الموقع لتمكين الملاحة المستقلة في البيئات المعقدة.
- التكامل: نظام مسجل الملكية مدمج في طائرات Skydio. التكامل سلس، لكنه محدود بنظامهم البيئي.
- المزايا: تجنب استثنائي للعوائق، قدرات مستقلة متقدمة. شاهدت هذا النظام يتنقل في بيئات داخلية معقدة قد تشكل تحديًا للطيارين البشريين.
- العيوب: مسجل الملكية، تكلفة عالية. يأتي الأداء بسعر مرتفع.
- الأفضل لـ: التطبيقات المهنية التي تتطلب ملاحة مستقلة متقدمة. عندما أحتاج إلى طائرة للتنقل في مساحات داخلية معقدة بشكل مستقل، هذا هو النظام الذي ألجأ إليه.

لوحة التدفق Crazyflie
- التكنولوجيا: نظام تدفق بصري مدمج للطائرات الصغيرة. فوجئت بمقدار الأداء الذي تمكنوا من تعبئته في حزمة صغيرة جدًا.
- الأداء: تتبع جيد للطائرات الدقيقة. على الرغم من حجمها الصغير، حققت تحليقًا داخليًا مستقرًا باستخدام هذا النظام.
- التكامل: مصمم لنظام Crazyflie البيئي. قمت أيضًا بتكييفه مع منصات طائرات صغيرة أخرى ببعض الجهد.
- المزايا: خفيفة الوزن للغاية، استهلاك منخفض للطاقة. بوزن بضعة جرامات فقط، إنها مثالية لأصغر الطائرات.
- الأداء: مثير للإعجاب بالنسبة للحجم ولكنه لا يقارن بالأنظمة الأكبر.
- الأفضل لـ: الطائرات المصغرة، المنصات التعليمية. أستخدمها في التصميمات أقل من 100 جرام حيث كل جرام مهم.
- نوع المستشعر: نظام تدفق بصري متقدم أو نظام تحديد المواقع بالرؤية. لقد وجدت أن الاستثمار في أجهزة استشعار عالية الجودة يؤتي ثماره في جودة اللقطات.
- استشعار الارتفاع: ليدار دقيق للحصول على بيانات ارتفاع دقيقة. بعد تجربة مختلف أجهزة استشعار الارتفاع، وجدت أن بيانات الارتفاع الدقيقة ضرورية لتحديد المواقع بشكل مستقر.
- المعالجة: معالج مخصص لحسابات التدفق البصري. في بنائي، يؤدي نقل هذه المعالجة من وحدة التحكم في الطيران إلى أداء أكثر موثوقية.
- الإضاءة: نظام إضاءة بالأشعة تحت الحمراء جيد لظروف الإضاءة المتغيرة. هذا سمح لي بالحفاظ على تحديد مواقع مستقر حتى عندما تتغير الإضاءة أثناء التصوير.
- نظام تحديد المواقع البصري من DJI (على طائرات DJI المتوافقة). للعمل الاحترافي، غالبًا ما أختار هذه لموثوقيتها.
- PX4FLOW مع مستشعر ارتفاع ليدار عالي الجودة. عادة ما تستخدم تصميماتي المخصصة للتصوير الداخلي هذه المجموعة.
- أجهزة استشعار متقدمة قائمة على PMW3901 مع معالجة مخصصة. توفر هذه أداءً ممتازًا بسعر أكثر سهولة.
- نوع المستشعر: مستشعر تدفق بصري بمعدل إطارات عالي. من خلال الاختبار، وجدت أن معدلات الإطارات الأعلى ضرورية للحفاظ على التتبع أثناء المناورات العنيفة.
- استشعار الارتفاع: ليدار مدمج سريع الاستجابة. وقت الاستجابة أمر بالغ الأهمية للحفاظ على الوعي بالموضع أثناء التغيرات السريعة في الارتفاع.
- المعالجة: معالجة فعالة مع زمن استجابة منخفض. أي تأخير في تحديثات الموقع يمكن أن يؤدي إلى الانحراف أثناء المناورات عالية السرعة.
- الوزن: وزن إضافي ضئيل. لتطبيقات السباق، أبحث عن أخف حل ممكن يلبي متطلبات الأداء.
- مستشعرات PMW3901 خفيفة الوزن مع ليدار مدمج. توفر هذه المجموعة أفضل نسبة أداء إلى وزن في مباني السباقات التي أقوم بها.
- نظام Crazyflie Flow المعدل للطائرات الأكبر حجمًا. لقد كيفت هذا النظام خفيف الوزن للغاية لعدة تصميمات للسباقات بنتائج جيدة.
- وحدات التدفق البصري/الليدار المتكاملة المخصصة. بالنسبة للتصميمات الأكثر حساسية للوزن، قمت بإنشاء وحدات متكاملة مخصصة تقلل الوزن إلى الحد الأدنى.
- نوع المستشعر: خيارات موثقة جيدًا ومفتوحة المصدر. عند تعليم الآخرين حول التدفق البصري، أعطي الأولوية للأنظمة ذات التوثيق الجيد على الأداء الخام.
- التكامل: واجهات قياسية ذات توافق واسع. هذا يسمح بتجريب أسهل عبر منصات مختلفة.
- المجتمع: مجتمع تطوير نشط ودعم. لقد وجدت أن دعم المجتمع يسرع عملية التعلم بشكل كبير.
- التكلفة: سعر معقول للميزانيات التعليمية. إمكانية الوصول مهمة للبيئات التعليمية.
- PX4FLOW مع البرامج الثابتة مفتوحة المصدر. التوثيق الشامل يجعل هذا مثاليًا للأغراض التعليمية.
- Crazyflie Flow Deck لتجارب الطائرات المصغرة. أستخدم هذه في ورش العمل بسبب أسعارها المعقولة وتوثيقها الجيد.
- مستشعرات التدفق البصري المتوافقة مع Arduino. توفر هذه نقطة دخول سهلة للطلاب الذين يتعلمون عن الملاحة القائمة على الرؤية.
- نوع المستشعر: أنظمة رؤية متقدمة متعددة المستشعرات. للتطبيقات الاحترافية، وجدت أن التكرار ودمج المستشعرات أمران أساسيان للتشغيل الموثوق.
- المعالجة: معالجة رؤية مخصصة قوية. تتطلب الملاحة الداخلية المعقدة قدرة معالجة كبيرة.
- التكرار: طرق تحديد مواقع متعددة تعمل معًا. تصميماتي الاحترافية لا تعتمد أبدًا على تقنية تحديد مواقع واحدة.
- تجنب العوائق: كشف العوائق المتكامل. هذا أنقذ عددًا لا يحصى من الطائرات من التحطم أثناء التشغيل المستقل.
- نظام الملاحة البصرية Skydio (على طائرات Skydio). عندما أحتاج إلى ملاحة داخلية مستقلة للتطبيقات الاحترافية، هذا هو خياري الأول.
- أنظمة متقدمة قائمة على PX4 مع مستشعرات تدفق بصري متعددة. للتصميمات الاحترافية المخصصة، أقوم بتنفيذ مستشعرات تدفق بصري احتياطية مع دمج المستشعرات.
- أنظمة الملاحة القائمة على Intel RealSense. توفر هذه إدراكًا ممتازًا للعمق بالإضافة إلى التدفق البصري للملاحة الداخلية الشاملة.
- الموضع: مركز الجاذبية أو الموقع المحدد. لقد وجدت أن تركيب المستشعر بأقرب ما يمكن من مركز جاذبية الطائرة بدون طيار يقلل من أخطاء الموضع أثناء الدوران.
- التوجيه: محاذاة مع محاور وحدة التحكم بالطيران. يمكن أن يتسبب عدم المحاذاة في انجراف الموضع في اتجاهات محددة - أتحقق دائمًا من المحاذاة أثناء التثبيت.
- عزل الاهتزاز: الحماية من اهتزاز المحرك. بعد مواجهة مشاكل في التتبع بسبب الاهتزاز، أقوم الآن بتثبيت جميع مستشعرات التدفق البصري بشكل مرن. انظر أيضًا: تخميد اهتزاز الطائرات بدون طيار
- مجال الرؤية: رؤية واضحة وغير معاقة للأسفل. أتأكد من عدم وجود كابلات أو معدات هبوط أو مكونات أخرى تعيق رؤية المستشعر.
- المسافة من الأرض: الحفاظ على نطاق الارتفاع الموصى به. من خلال الاختبار، حددت ارتفاع التشغيل الأمثل لكل من مستشعراتي وأقوم بتكوين تحذيرات الحد الأدنى للارتفاع وفقًا لذلك.
- مستشعرات الارتفاع: التكامل المناسب للسونار/الليدار. بيانات الارتفاع الدقيقة ضرورية - أضع مستشعرات الارتفاع لتجنب التداخل من تيار المروحة.
- أنظمة الإضاءة: الوضع الصحيح لمضيئات LED/IR. أتأكد من أن الإضاءة متساوية عبر مجال رؤية المستشعر. انظر أيضًا: أنظمة LED للطائرات بدون طيار
- الأنظمة التكميلية: التكامل مع أنظمة تحديد المواقع الأخرى. تستخدم تركيباتي المتقدمة أنظمة تحديد مواقع متعددة مع معايرة دقيقة للفروق بين المستشعرات.
- تمكين التدفق البصري: تفعيله في البرامج الثابتة لوحدة التحكم بالطيران. لكل برنامج ثابت إعدادات مختلفة - أوثق المعلمات المحددة لكل من تركيباتي.
- المعايرة: إجراءات معايرة خاصة بالمستشعر. المعايرة المناسبة تحدث فرقًا كبيرًا في الأداء - أعيد المعايرة بعد أي تغييرات مهمة في البناء.
- ضبط المعلمات:
- عوامل القياس: التعديل بناءً على تركيب المستشعر وخصائص العدسة. أقوم بضبط هذه العوامل من خلال اختبارات الطيران الخاضعة للرقابة.
- الترشيح: تكوين الترشيح المناسب لتقليل الضوضاء. تعتمد إعدادات الفلتر المناسبة على المستشعر المحدد وخصائص الطيران.
- إعدادات الدمج: معلمات لدمج المستشعر مع المستشعرات الأخرى. الحصول على هذه الإعدادات بشكل صحيح أمر بالغ الأهمية للدمج السلس للمستشعرات.
- أوضاع الطيران: تكوين وضع الحفاظ على الموضع والأوضاع ذات الصلة. أقوم بإنشاء أوضاع طيران مخصصة محسنة لعملية التدفق البصري.
- الاختبار الثابت: التحقق من قراءات المستشعر أثناء الثبات. أتحقق من الانجراف والضوضاء في تقديرات الموضع قبل اختبار الطيران.
- اختبار الحركة: حركة خاضعة للرقابة للتحقق من التتبع. أستخدم نهجًا منهجيًا لاختبار التتبع في اتجاهات وسرعات مختلفة.
- استجابة الارتفاع: التحقق من القياس على ارتفاعات مختلفة. أختبر كيف تتغير دقة الموضع مع الارتفاع لتحديد نطاقات التشغيل المثلى.
- اختبار ظروف الإضاءة: الأداء في إضاءة متنوعة. أختبر الانتقالات بين ظروف الإضاءة المختلفة لتحديد المشاكل المحتملة.
- الانجراف رغم تفعيل التدفق البصري. لقد واجهت هذا عند الطيران فوق أسطح ذات نسيج غير كافٍ.
- أداء غير متسق. هذا يشير غالبًا إلى مشاكل في المعايرة أو العمل خارج النطاق الأمثل للمستشعر.
- التحقق من نسيج السطح والإضاءة. أحمل معي حصيرة ذات نسيج للطيران فوق الأسطح الإشكالية.
- التحقق من أن الارتفاع ضمن النطاق الفعال للمستشعر. لقد أنشأت مخططًا مرجعيًا لنطاقات الارتفاع المثلى لكل من مستشعراتي.
- إعادة معايرة المستشعر والتحقق من المحاذاة. أقوم بإجراء إعادة معايرة كاملة كلما لاحظت تدهور الأداء.
- ضبط معلمات EKF أو وحدة التحكم بالموضع. يمكن أن يؤدي الضبط الدقيق لهذه المعلمات إلى تحسين الأداء بشكل كبير مع الأسطح الصعبة.
- تصحيحات مفاجئة في الموضع. لقد رأيت هذا عندما يفقد المستشعر التتبع مؤقتًا ثم يستعيده.
- التذبذبات في الحفاظ على الموضع. هذا يشير عادةً إلى مشاكل في ضبط وحدة التحكم أو تأخير في بيانات التدفق البصري.
- التحقق من الاهتزاز الذي يؤثر على المستشعر. لقد حللت العديد من مشاكل "الارتعاش" عن طريق تحسين عزل الاهتزاز.
- ضبط قيم وحدة التحكم بالموضع. القيم المنخفضة غالبًا ما تؤدي إلى الحفاظ على موضع أكثر سلاسة ولكن أقل دقة.
- زيادة الترشيح على بيانات التدفق البصري. أقوم بتحقيق التوازن بين الترشيح والتأخير - الترشيح المفرط يسبب مشاكله الخاصة.
- التحقق من استمرارية الإضاءة. لقد تتبعت السلوك غير المنتظم إلى الظلال أو أنماط الضوء المتحركة عبر مجال الرؤية.
- يفشل وضع تثبيت الموقع تمامًا. هذا عادة ما يكون واضحًا حيث تبدأ الطائرة بدون طيار في الانجراف بشكل كبير.
- المستشعر لا يظهر أي كشف للحركة. أتحقق من بيانات التشخيص للتأكد مما إذا كان المستشعر يكتشف الحركة على الإطلاق.
- تحقق من توصيلات المستشعر والطاقة. تسببت الاتصالات المتقطعة في العديد من حالات فشل التتبع في تجربتي.
- تحقق من أن السطح له قوام كافٍ. أتجنب الطيران فوق الأسطح الموحدة أو أحمل وسادة هبوط ذات قوام.
- تأكد من الإضاءة الكافية. لقد أضفت أنظمة إضاءة إضافية للطائرات بدون طيار التي تعمل بشكل متكرر في الإضاءة المنخفضة.
- اختبار المستشعر مع أسطح جيدة معروفة. أستخدم نمط اختبار موحد للتحقق من وظائف المستشعر.
- تسجيل البيانات: تحليل سجلات الطيران لأداء المستشعر. لقد حددت عددًا لا يحصى من المشكلات من خلال التحليل الدقيق للسجلات.
- المراقبة في الوقت الحقيقي: عرض بيانات المستشعر أثناء التشغيل. بالنسبة للمشكلات المعقدة، أقوم بإعداد قياس عن بعد في الوقت الحقيقي لمراقبة سلوك المستشعر.
- الاختبار المنهجي: عزل المتغيرات لتحديد مشكلات محددة. أغير معلمة واحدة في كل مرة لتحديد علاقات السبب والنتيجة الدقيقة.
- اختبار المقارنة: اختبار مع أجهزة جيدة معروفة. أحتفظ بإعداد "مرجعي" للتدفق البصري لاختبار المقارنة.
- EKF (مرشح كالمان الممتد): خوارزمية متطورة لدمج المستشعرات. لقد وجدت أن ضبط EKF المناسب يحدث فرقًا كبيرًا في استقرار الموقع.
- المرشحات التكميلية: نهج أبسط للدمج الأساسي للمستشعرات. بالنسبة لوحدات تحكم الطيران الأقل قوة، أستخدم أحيانًا هذا النهج بدلاً من EKF.
- المتوسط المرجح: تقنية الدمج الأساسية لأنواع المستشعرات المماثلة. لقد استخدمت هذا بنجاح عند الجمع بين مستشعرات التدفق البصري المتعددة.
- التسلسلات الهرمية الاحتياطية: إعطاء الأولوية لمستشعرات مختلفة بناءً على الظروف. تنتقل بناءاتي المتقدمة تلقائيًا بين أنظمة تحديد المواقع بناءً على موثوقيتها في الظروف الحالية.
- تكامل SLAM: التوطين ورسم الخرائط المتزامن مع التدفق البصري. لقد بنيت طائرات بدون طيار تجريبية تنشئ خرائط للمساحات الداخلية أثناء التنقل خلالها.
- تخطيط المسار: تحديد المسار المستقل في البيئات التي لا يتوفر فيها نظام تحديد المواقع العالمي (GPS). يمكن لبناءاتي المتقدمة التنقل في المساحات الداخلية المعقدة دون مسارات مبرمجة مسبقًا.
- تخزين المواقع: تخزين المواقع بناءً على تحديد موقع التدفق البصري. أستخدم هذا لوظيفة "العودة إلى الإطلاق" في الداخل.
- التنقل متعدد الطوابق: التعامل مع الانتقالات العمودية بين المستويات. لا يزال هذا يمثل تحديًا، لكنني حققت نجاحًا مع دمج الضغط الباروميتري للانتقالات بين الطوابق.
- التحويم الدقيق: ثبات الموقع الفائق لمهام الفحص. لقد حققت استقرارًا للموقع دون السنتيمتر لفترات طويلة.
- أوامر الحركة النسبية: التحرك لمسافات دقيقة دون تحديد موقع مطلق. هذا مفيد بشكل خاص لروتينات الفحص الآلي.
- قياس المسافة المعتمد على التدفق: تتبع المسافة بدون GPS. لقد استخدمت هذا لقياس المسافات في البيئات التي لا تتوفر فيها تقنية GPS.
- متابعة السطح الديناميكية: الحفاظ على ارتفاع ثابت فوق الأسطح غير المستوية. من خلال الجمع بين التدفق البصري وتقنية ليدار الدقيقة، يمكن لبناءاتي اتباع تضاريس الأسطح غير المستوية.
- مستشعرات ذات دقة أعلى: تصوير أكثر تفصيلاً لتتبع أفضل. لقد اختبرت مستشعرات نموذجية بدقة أعلى 4 مرات من الطرازات الحالية، مع تحسينات مثيرة للإعجاب في دقة التتبع.
- كاميرات الغالق العالمي: القضاء على تشويش الحركة للحصول على تتبع أفضل أثناء الحركة السريعة. الفرق في الأداء عالي السرعة ملحوظ - أتوقع أن تصبح هذه معيارية.
- معالجات الذكاء الاصطناعي المتخصصة: أجهزة مخصصة لمعالجة الرؤية. تُظهر النماذج الأولية التي اختبرتها مع تسريع الذكاء الاصطناعي تحسنًا كبيرًا في التتبع في الظروف الصعبة.
- التصغير: مستشعرات أصغر وأخف وزناً مع أداء أفضل. كل جيل يصبح أصغر بينما يؤدي بشكل أفضل - وهو أمر بالغ الأهمية للتطبيقات الحساسة للوزن.
- أنظمة متعددة الاتجاهات: التدفق البصري في اتجاهات متعددة في وقت واحد. أنا متحمس بشكل خاص للأنظمة التي يمكنها تتبع الحركة في جميع الاتجاهات، وليس فقط للأسفل.
- التتبع المعزز بالذكاء الاصطناعي: تعلم الآلة يحسن اكتشاف الميزات والتتبع. يمكن للتطبيقات المبكرة التي اختبرتها الحفاظ على التتبع على الأسطح التي تربك الخوارزميات التقليدية تمامًا.
- خوارزميات تكيفية: ضبط ذاتي بناءً على ظروف السطح والإضاءة. تقوم هذه الأنظمة تلقائيًا بضبط المعلمات بناءً على الظروف الحالية، مع الحفاظ على الأداء الأمثل.
- الحركة التنبؤية: توقع أنماط الحركة للحصول على تتبع أفضل. من خلال التنبؤ بالحركة، تحافظ هذه الأنظمة على التتبع حتى أثناء انسداد المستشعر لفترة وجيزة.
- الفهم الدلالي: التعرف على أنواع الأسطح للتتبع المحسن. بدلاً من مجرد تتبع الميزات، تفهم هذه الأنظمة ما تنظر إليه وتعدل وفقًا لذلك.
- دمج المستشعرات بشكل أكثر إحكامًا: تكامل أكثر تطوراً مع أنظمة تحديد المواقع الأخرى. تتلاشى الحدود بين تقنيات تحديد المواقع المختلفة مع تحسن خوارزميات الدمج.
- واجهات موحدة: بروتوكولات مشتركة لبيانات التدفق البصري. سيجعل هذا من السهل دمج مستشعرات مختلفة مع وحدات تحكم طيران متنوعة.
- سهولة الوصول للمستهلكين: أنظمة أكثر بأسعار معقولة مع أداء أفضل. تصبح التكنولوجيا بسرعة أكثر سهولة للهواة ومشغلي الأعمال الصغيرة.
- الاعتراف التنظيمي: القبول الرسمي للتدفق البصري للملاحة الاحتياطية. أتوقع أن تعترف سلطات الطيران بشكل متزايد بهذه الأنظمة كنسخ احتياطية صالحة لتحديد المواقع.
- حمل منصة هبوط ذات ملمس: أحمل دائمًا حصيرة صغيرة ذات ملمس عالي التباين للإقلاع والهبوط على الأسطح المشكلة. هذا يضمن تتبعًا موثوقًا خلال المراحل الأكثر أهمية للطيران.
- اختبار البيئات الجديدة قبل الرحلات الحرجة: أقوم بإجراء اختبار تحليق بسيط في أي بيئة جديدة قبل محاولة المناورات المعقدة أو المهام المستقلة. هذا يكشف بسرعة عن أي مشاكل في التتبع مع السطح المحدد أو الإضاءة.
- الحفاظ على إضاءة متسقة أثناء الطيران: التغييرات المفاجئة في الإضاءة يمكن أن تربك مستشعرات التدفق البصري. أحاول الحفاظ على إضاءة متسقة خلال العمليات الحرجة والاقتراب من تحولات الإضاءة ببطء.
- تنظيف المستشعرات بانتظام: الغبار أو البقع على عدسة المستشعر يمكن أن تقلل الأداء بشكل كبير. أقوم بتنظيف جميع المستشعرات البصرية قبل الرحلات المهمة باستخدام تقنيات تنظيف عدسات الكاميرا المناسبة.
- إعادة المعايرة بعد تغيرات درجة الحرارة: لاحظت أن تغيرات درجة الحرارة الكبيرة يمكن أن تؤثر على معايرة المستشعر. أقوم بإعادة المعايرة بعد الانتقال بين البيئات ذات اختلافات درجة الحرارة الكبيرة.
- استخدام التدفق البصري كجزء من نظام متعدد: لا أعتمد أبدًا فقط على التدفق البصري للتطبيقات الحرجة. تشمل مشاريعي المهنية دائمًا تقنيات تحديد مواقع متعددة يمكنها التحقق من بعضها البعض.
- تسجيل وتحليل بيانات الطيران: أراجع بانتظام سجلات الطيران لتحديد المشاكل المحتملة قبل أن تصبح مشكلات. غالبًا ما يظهر التدهور التدريجي في جودة التتبع في السجلات قبل أن يكون ملحوظًا أثناء الطيران.
- ضبط المعلمات للبيئات المحددة: أحتفظ بمجموعات معلمات مختلفة محسنة لبيئات طيران مختلفة. ما يعمل بشكل مثالي في الداخل قد لا يكون مثاليًا للطيران الخارجي تحت المظلة.
- اختبار دقة مستشعر الارتفاع بشكل مستقل: بيانات الارتفاع غير الدقيقة ستؤثر على أداء التدفق البصري. أتحقق من دقة مستشعر الارتفاع بشكل منفصل قبل استكشاف مشاكل التدفق البصري وحلها.
- مراعاة انعكاسية السطح: الأسطح عالية الانعكاس أو الشفافة يمكن أن تربك مستشعرات التدفق البصري. أتجنب الطيران فوق الزجاج أو الماء أو الأسطح عالية اللمعان عند الاعتماد على التدفق البصري.
- الدقة: في الظروف المثالية، يمكن للتدفق البصري عالي الجودة أن يوفر تثبيتًا للموقع أكثر دقة من GPS الاستهلاكي. قمت بقياس دقة تثبيت الموقع في حدود 2-3 سم مع أنظمة التدفق البصري الجيدة، مقارنة بـ 1-2 متر مع GPS القياسي.
- الموثوقية: GPS أكثر اتساقًا عبر البيئات المختلفة لكنه يفشل في الداخل أو تحت الغطاء. يعمل التدفق البصري في البيئات المحرومة من GPS لكنه أكثر حساسية لظروف السطح والإضاءة.
- خصائص الانجراف: موقع GPS يميل إلى التجول ببطء ضمن نصف قطر 1-2 متر. انجراف التدفق البصري عادة ما يكون ضئيلاً على الأسطح الجيدة ولكن يمكن أن يفشل فجأة تمامًا على الأسطح الصعبة.
- الاستخدام التكميلي: أحصل على أفضل النتائج باستخدام كلا النظامين معًا، مع قيام وحدة التحكم بالطيران بترجيح مدخلاتهما بذكاء بناءً على الظروف. هذا يوفر موثوقية مستوى GPS مع دقة التدفق البصري عندما تكون الظروف مواتية لكليهما.
- الأسطح المثالية: أسطح ذات ملمس، غير عاكسة مع أنماط عالية التباين. أحصل على أفضل أداء على أسطح مثل السجاد ذي الملمس أو الأسفلت أو العشب.
- الأسطح المشكلة: الأسطح الموحدة، التي تفتقر إلى الميزات مثل الخرسانة الملساء أو المياه الساكنة أو الزجاج. لقد واجهت فشلًا كاملًا في التتبع على هذه الأسطح.
- الأسطح ذات التحدي المتوسط: الأنماط المتكررة أو الأسطح منخفضة التباين. يمكن أن تعمل هذه ولكن بأداء منخفض—أراقب تثبيت الموقع بعناية أكبر عند الطيران فوق هذه الأسطح.
- حركة السطح: الأسطح المتحركة مثل الماء مع الموجات أو أوراق الشجر المتحركة في الرياح. المستشعرات الحديثة تتعامل مع هذه بشكل أفضل من القديمة، لكنها لا تزال تمثل تحديات.
- المستشعرات الأساسية (PMW3901): عادة ما تكون فعالة حتى 2-3 أمتار في اختباراتي. يتدهور الأداء بسرعة فوق هذا الارتفاع.
- المستشعرات المستقلة المتقدمة: المستشعرات عالية الجودة مثل PX4FLOW تحافظ على تتبع جيد حتى 5-8 أمتار في تجربتي.
- الأنظمة التجارية المتكاملة: حافظت أفضل الأنظمة من DJI و Skydio على تتبع موثوق حتى 10-12 مترًا في اختباراتي.
- العوامل المؤثرة على الحد الأقصى للارتفاع:
- دقة المستشعر وجودته
- خصائص العدسة
- ملمس السطح
- ظروف الإضاءة
- قوة المعالجة
- متطلبات السطح: لا تزال بحاجة إلى أسطح ذات ملمس. أحصل على أداء خارجي ممتاز فوق العشب أو التراب أو الأسفلت، ولكن نتائج سيئة فوق الماء أو الثلج.
- تحديات الإضاءة: ضوء الشمس المباشر يمكن أن يغمر بعض المستشعرات، بينما يتعامل البعض الآخر معه بشكل جيد. وجدت أن المستشعرات ذات النطاق الديناميكي الجيد وضبط التعرض التلقائي تؤدي بشكل أفضل في الخارج.
- تأثيرات الرياح: الرياح القوية يمكن أن تؤثر على استقرار الارتفاع، مما يؤثر على دقة التدفق البصري. أولي اهتمامًا خاصًا للحفاظ على الارتفاع عند استخدام التدفق البصري في ظروف الرياح.
- الاستخدام التكميلي: في الخارج، عادة ما أستخدم التدفق البصري كمكمل لـ GPS وليس بديلاً عنه. هذا يوفر الاحتياط وتحسين الدقة عندما يعمل كلا النظامين بشكل جيد.
- الإضاءة المثالية: إضاءة معتدلة ومتساوية بدون ظلال قاسية. أحصل على أفضل أداء موثوق في هذه الظروف.
- الإضاءة المنخفضة: المستشعرات المزودة بإضاءة الأشعة تحت الحمراء الجيدة يمكنها الحفاظ على الأداء في الإضاءة المنخفضة. لقد نجحت في الطيران في ظروف شبه مظلمة باستخدام مستشعرات ذات مضيئات أشعة تحت حمراء قوية.
- الإضاءة المتغيرة: التحولات بين ظروف الإضاءة المختلفة يمكن أن تربك المستشعرات مؤقتًا. أقترب من هذه التحولات ببطء لإعطاء المستشعر وقتًا للتكيف.
- ضوء الشمس المباشر: يمكن أن يغمر بعض المستشعرات أو يخلق ظلالًا قاسية تؤثر على التتبع. وجدت أن المستشعرات ذات الغالق العالمي ونطاق ديناميكي جيد تتعامل مع ضوء الشمس بشكل أفضل بكثير.
- الإضاءة الاصطناعية: يمكن أن تسبب بعض أنواع الإضاءة الاصطناعية مشاكل بسبب الوميض. لقد واجهت مشاكل في التتبع تحت بعض إضاءات LED والفلورسنت التي تومض بترددات تتداخل مع معدل إطارات المستشعر.
- عامل القياس: التدفق البصري يقيس فقط حركة البكسل - البيانات المتعلقة بالارتفاع ضرورية لتحويل هذا إلى مسافة في العالم الحقيقي. لقد لاحظت زيادة أخطاء الموضع بشكل أسي مع عدم دقة قياس الارتفاع.
- خيارات التكنولوجيا: الباروميترية (الأقل دقة)، الموجات فوق الصوتية (متوسطة)، وليدار (الأكثر دقة). بعد الاختبارات المكثفة، أستخدم حصريًا ليدار للتطبيقات الجادة بسبب دقتها المتفوقة.
- انتشار الخطأ: أخطاء الارتفاع الصغيرة تسبب أخطاء كبيرة في الموضع. في اختباراتي، خطأ قياس الارتفاع بنسبة 10٪ يؤدي عادة إلى خطأ في الموضع بنسبة 10٪ على الأقل، وغالبًا أكثر.
- تغيرات السطح: الأسطح غير المستوية يمكن أن تربك مستشعرات الارتفاع البسيطة. وجدت أن ليدار يتعامل مع التضاريس المتفاوتة بشكل أفضل بكثير من المستشعرات فوق الصوتية.
- عمليات المنطقة المحدودة: نعم، يمكن للتدفق البصري تمكين الطيران المستقل بالكامل داخل المساحات المحصورة. لقد برمجت مسارات مستقلة معقدة داخلية تنفذ بشكل موثوق.
- العمليات الممتدة: لا ينصح بها كنظام تحديد المواقع الوحيد. تتراكم أخطاء الموضع مع مرور الوقت والمسافة - لقد قست انحرافًا بعدة أمتار بعد طيران ممتد باستخدام التدفق البصري فقط.
- المناهج الهجينة: أفضل النتائج تأتي من الجمع بين التدفق البصري وأنظمة تحديد المواقع الأخرى. أكثر بناءاتي المستقلة موثوقية تستخدم التدفق البصري جنبًا إلى جنب مع GPS، الضغط الباروميتري، والمستشعرات الأخرى مع خوارزميات دمج متطورة.
- التنفيذ التجاري: الأنظمة المتطورة مثل تلك من DJI و Skydio تستخدم التدفق البصري كجزء من أنظمة الملاحة الشاملة. هذه توفر قدرات مستقلة مثيرة للإعجاب حتى في البيئات المحرومة من GPS.
العيوب: نطاق محدود، نظام بيئي محدد. النظا

اختيار نظام التدفق البصري المناسب
يعتمد اختيار حل التدفق البصري المناسب على احتياجاتك المحددة ومتطلبات البناء. بعد تجربة عدد لا يحصى من المجموعات، إليك توصياتي:
لطائرات التصوير الفوتوغرافي/الفيديو الداخلية
الأولوية: ثبات الموضع الموثوق، الحركة السلسة، أداء جيد في الإضاءة المنخفضةالميزات الموصى بها:أمثلة:
للسباق/الحر في البيئات المحرومة من GPS
الأولوية: استجابة سريعة، تتبع موثوق أثناء الحركة السريعة، خفيف الوزنالميزات الموصى بها:أمثلة:
لمنصات التعليم/التطوير
الأولوية: توثيق جيد، سهولة التكامل، دعم التطويرالميزات الموصى بها:أمثلة:
للأنظمة المستقلة الداخلية الاحترافية
الأولوية: أقصى موثوقية، قدرات ملاحة متقدمة، تعدد أجهزة الاستشعار الاحتياطيةالميزات الموصى بها:أمثلة:
التثبيت والإعداد
التثبيت والتكوين السليمان أمران ضروريان للأداء الأمثل. لقد طورت هذه الممارسات المثلى من خلال سنوات من المحاولة والخطأ.
تركيب الأجهزة
اعتبارات التثبيت
المستشعرات المصاحبة
تكوين البرمجيات
إعداد وحدة التحكم بالطيران
الاختبار والتحقق

استكشاف مشكلات التدفق البصري وإصلاحها
حتى أفضل أنظمة التدفق البصري يمكن أن تواجه مشاكل. إليك كيف أشخص وأعالج المشكلات الشائعة:
المشكلات الشائعة والحلول
ضعف الحفاظ على الموضع
الأعراض:الحلول:
الحركة المتقلبة أو "الارتعاش"
الأعراض:الحلول:
فقدان التتبع الكامل
الأعراض:الحلول:
مناهج التشخيص
التطبيقات والتقنيات المتقدمة
للمستخدمين ذوي الخبرة الذين يتطلعون إلى تعظيم إمكانات أنظمة التدفق البصري، توفر هذه المفاهيم المتقدمة رؤى أعمق.
مناهج دمج المستشعرات
الجمع بين التدفق البصري وبيانات تحديد المواقع الأخرى:
رسم الخرائط والملاحة الداخلية
استخدام التدفق البصري كجزء من الملاحة الداخلية الشاملة:
تطبيقات مخصصة
استخدامات متخصصة طورتها لتكنولوجيا التدفق البصري:
الاتجاهات المستقبلية في تكنولوجيا التدفق البصري
يستمر مشهد التدفق البصري في التطور. بناءً على اختباري للمكونات المتطورة والمناقشات مع المصنعين، إليك ما أراه يتجه إليه المستقبل:
تطورات الأجهزة
ابتكارات البرمجيات
اتجاهات التكامل
نصائح احترافية من تجربتي
بعد آلاف الرحلات مع عشرات تكوينات التدفق البصري، إليك بعض الرؤى التي اكتسبتها بصعوبة والتي لن تجدها في الأدلة:
الأسئلة الشائعة: أسئلة شائعة حول مستشعرات التدفق البصري
كيف يقارن التدفق البصري مع GPS لتثبيت الموقع؟
بناءً على اختباراتي المكثفة في ظروف مختلفة:في تجربتي، التدفق البصري ليس بديلاً عن GPS ولكنه تقنية مكملة تتفوق في بيئات مختلفة.للمزيد من المعلومات التفصيلية حول تحديد مواقع GPS، انظر:
تقنية GNSS
ما هي الأسطح التي تعمل بشكل أفضل مع مستشعرات التدفق البصري؟
خصائص السطح تؤثر بشكل كبير على أداء التدفق البصري:أحمل حصيرة صغيرة ذات ملمس للإقلاع والهبوط على الأسطح المشكلة، مما يضمن تتبعًا جيدًا خلال هذه المراحل الحرجة.
ما هو الحد الأقصى للارتفاع لتشغيل التدفق البصري الموثوق؟
تختلف قيود الارتفاع بشكل كبير بين المستشعرات:أختبر دائمًا وأوثق نطاق الارتفاع الفعال لكل طائرة من طائراتي المزودة بتدفق بصري وأبقى ضمن هذه الحدود أثناء التشغيل.
هل يمكن أن يعمل التدفق البصري في الخارج؟
نعم، ولكن مع اعتبارات مهمة:بعض أفضل أداء للتدفق البصري كان في الواقع في الخارج في مناطق ذات غطاء شجري جزئي—ملمس كافٍ للتتبع الجيد ولكن ليس إشارة GPS كافية لتحديد المواقع بالأقمار الصناعية بشكل موثوق.
كيف تؤثر ظروف الإضاءة على الأداء؟
الإضاءة لها تأثير كبير على أداء التدفق البصري:
ما مدى أهمية مستشعر الارتفاع للتدفق البصري؟
مستشعر الارتفاع مهم بشكل قطعي للتشغيل الدقيق للتدفق البصري:أعتبر مستشعر الارتفاع مهمًا بنفس أهمية مستشعر التدفق البصري نفسه - لقد أدى الترقية من الموجات فوق الصوتية إلى ليدار إلى تحسين ثبات الموضع أكثر من ترقية مستشعر التدفق البصري في العديد من بناءاتي.
هل يمكن للتدفق البصري أن يحل محل GPS للطيران المستقل؟
بناءً على خبرتي مع أنظمة مستقلة مختلفة:للعمليات المستقلة الحرجة، لا أعتمد أبدًا على التدفق البصري وحده - تعمل التكنولوجيا بشكل أفضل كجزء من نظام تحديد مواقع احتياطي.
الخلاصة
لقد حولت مستشعرات التدفق البصري طريقة عمل الطائرات بدون طيار في البيئات المحرومة من GPS. بعد سنوات من اختبار وتنفيذ أنظمة تدفق بصري مختلفة، أصبحت أقدر مدى مساهمة هذه المكونات التي غالبًا ما يتم تجاهلها في الطيران الداخلي المستقر والدقيق.إن فهم تكنولوجيا التدفق البصري، وطرق التنفيذ، وأفضل ممارسات الإعداد يسمح لك بتحسين طائرتك بدون طيار للحصول على وضع موثوق في البيئات الصعبة. لقد رأيت طيارين يكافحون مع طيران داخلي غير مستقر، دون إدراك أن إضافة نظام تدفق بصري مناسب يمكن أن يحل مشاكلهم تمامًا.تستمر التكنولوجيا في التطور بسرعة، مع مستشعرات وخوارزميات معالجة أكثر تطوراً تمكن من أداء موثوق بشكل متزايد في مجموعة أوسع من الظروف. من خلال اختيار نظام التدفق البصري المناسب وتنفيذه بشكل صحيح، ستحقق طيرانًا مستقرًا ودقيقًا حتى في البيئات التي لا يتوفر فيها GPS.سواء كنت تبني أول طائرة بدون طيار تحافظ على الموضع أو الخمسين، فإن الانتباه إلى اختيار مستشعر التدفق البصري وإعداده سيؤتي ثماره في استقرار الطيران وموثوقيته. لقد تعلمت الكثير من هذه الدروس بالطريقة الصعبة - من خلال رحلات غير مستقرة، وانجراف غير متوقع، وساعات من استكشاف الأخطاء وإصلاحها. آمل أن تساعدك تجربتي على تجنب بعض هذه الدروس المؤلمة والحصول على أقصى استفادة من نظام المحافظة على الموضع الخاص بك.


