Tecnologia GNSS: Um Guia Abrangente para Navegação Segura
Enquanto "GPS" é frequentemente usado como um termo genérico para navegação por satélite em drones, os sistemas de navegação modernos na verdade aproveitam várias constelações de satélites conhecidas coletivamente como GNSS (Sistemas Globais de Navegação por Satélite). Depois de anos construindo e voando drones com vários sistemas de navegação, vi em primeira mão como a implementação adequada do GNSS pode fazer a diferença entre um drone que retorna para casa de forma confiável e um que se torna um caro enfeite de árvore. Este guia abrangente explora os diferentes sistemas de navegação por satélite, suas características, a evolução dos módulos receptores GNSS e como essas tecnologias aprimoram os recursos de navegação dos drones.
Introdução à Tecnologia GNSS
GNSS (Sistema Global de Navegação por Satélite) se refere à constelação de satélites que fornecem sinais do espaço que transmitem dados de posicionamento e tempo para os receptores GNSS. Esses receptores então usam esses dados para determinar a localização. Embora o GPS seja o GNSS mais conhecido, existem vários outros sistemas e os receptores modernos geralmente usam vários sistemas simultaneamente para melhorar o desempenho.

Ainda me lembro do meu primeiro drone equipado com GPS em 2020. Ele usava um módulo primitivo Ublox LEA-6H que levava quase dois minutos para obter uma trava de posição e derivava vários metros durante um voo pairado. Avançando para hoje, estou voando com receptores de várias constelações que travam em segundos e mantêm a posição com precisão notável. A evolução tem sido nada menos que revolucionária para as capacidades dos drones.
A Evolução da Navegação por Satélite
A navegação por satélite evoluiu dramaticamente desde o seu início:
• Origens Militares (1970-1980): GPS desenvolvido pelo Departamento de Defesa dos EUA para aplicações militares. A tecnologia era estritamente controlada e limitada em aplicações civis.
• Acesso Civil (1990): A política de Disponibilidade Seletiva tornou o GPS deliberadamente menos preciso para uso civil. As primeiras unidades GPS tinham erros de mais de 100 metros!
• Acesso Civil Completo (2000): A remoção da Disponibilidade Seletiva permitiu aplicações civis precisas. Isso foi um divisor de águas que abriu as portas para a navegação confiável de drones.
• Era Multi-Constelação (2010): O desenvolvimento e implantação de sistemas alternativos como GLONASS, Galileo e BeiDou criaram redundância e melhoraram o desempenho. Notei uma melhoria significativa na confiabilidade de navegação dos meus drones quando atualizei de módulos somente GPS para GPS+GLONASS por volta de 2022.
• Integração Moderna (Presente): Receptores multi-constelação se tornaram padrão em dispositivos de consumo. Hoje, até drones de orçamento podem acessar mais de 30 satélites simultaneamente para posicionamento em nível de centímetros.
Princípios Básicos da Navegação por Satélite
Todos os sistemas GNSS operam em princípios semelhantes, embora entender esses fundamentos tenha me ajudado a solucionar inúmeros problemas de navegação ao longo dos anos:
- Constelação de Satélites: Uma rede de satélites orbitando a Terra transmite sinais precisos de tempo e posição. Quanto mais satélites seu receptor puder "ver", melhor será a precisão da posição.
- Transmissão de Sinal: Esses satélites transmitem informações precisas de tempo e posição em frequências de rádio específicas. Os sinais são incrivelmente fracos quando chegam à Terra - cerca da mesma potência de uma lâmpada de 50 watts vista a 12.000 milhas de distância!
- Trilateração: O receptor do seu drone calcula a posição medindo os atrasos de tempo de vários satélites. Gosto de explicar isso como o receptor perguntando: "Quão longe estou do satélite A? Quão longe do satélite B?" e assim por diante, então determinando a única posição possível que satisfaz todas essas distâncias.
- Requisitos Mínimos: Você precisa de pelo menos 4 satélites para posicionamento 3D (latitude, longitude, altitude). Aprendi por experiência que, embora 4 satélites funcionem, você realmente quer 8+ para navegação confiável de drones.
- Correção de Erros: Várias técnicas melhoram a precisão, levando em conta atrasos atmosféricos, erros de relógio e outros fatores. Os receptores modernos são notavelmente bons nisso, é por isso que os drones de hoje podem manter a posição com tanta precisão.
Principais Métricas de Desempenho
Vários fatores determinam o desempenho do GNSS, e entender isso me ajudou a escolher os módulos certos para diferentes aplicações:
• Precisão: Quão próxima a posição medida está da posição real. Para navegação padrão de drones, uma precisão de 2-3 metros geralmente é suficiente, mas para mapeamento ou aplicações de precisão, você pode precisar de precisão em nível de centímetros.
• Disponibilidade: A porcentagem de tempo que o serviço é utilizável. Descobri que receptores multi-constelação melhoram drasticamente essa métrica, especialmente em ambientes desafiadores como áreas urbanas ou sob cobertura parcial de árvores.
• Continuidade: A capacidade de funcionar sem interrupção. Isso é crítico para missões autônomas - uma queda momentânea do GNSS durante um voo de longo alcance pode ser desastrosa.
• Integridade: Confiança de que o sistema está fornecendo informações corretas. Os receptores modernos têm algoritmos sofisticados para detectar e rejeitar medições errôneas.
• Tempo para Primeira Fixação (TTFF): Quão rapidamente uma posição pode ser estabelecida. Lembro-me dos dias de esperar vários minutos com receptores de baixo custo por um bloqueio de GPS antes da decolagem - agora normalmente são segundos com módulos modernos.
• Taxa de Atualização: Com que frequência a posição é atualizada. Para corrida ou voo dinâmico, taxas de atualização mais altas (10Hz+) proporcionam uma navegação visivelmente mais suave.
Principais Constelações GNSS
Ao longo dos anos, usei receptores que suportam várias combinações desses sistemas, e cada um tem seus pontos fortes e fracos. Entender suas diferenças me ajudou a otimizar meus drones para diferentes condições de voo.
GPS (Sistema de Posicionamento Global)
O sistema de navegação por satélite original e mais amplamente utilizado:
• País/Região: Estados Unidos
• Operação Inicial: 1978 (limitado), Capacidade Operacional Total em 1995
• Satélites: 31 satélites operacionais (24 necessários para cobertura global)
• Características Orbitais:
- Órbita Terrestre Média a aproximadamente 20.200 km
- 6 planos orbitais com 4+ satélites cada
- Período orbital de 12 horas
• Frequências de Sinal:
- L1 (1575,42 MHz) - Frequência civil primária
- L2 (1227,60 MHz) - Usado para aplicações militares e civis avançadas
- L5 (1176,45 MHz) - Frequência mais recente para aplicações de segurança de vida
• Precisão:
- Serviço de Posicionamento Padrão (SPS): ~3-5 metros
- Serviço de Posicionamento Preciso (PPS): ~<1 metro (militar)
O GPS tem sido a espinha dorsal da navegação de drones por anos, e ainda o considero o sistema mais confiável em geral. Voei em áreas remotas em todo o mundo e a cobertura do GPS raramente me decepcionou. A maturidade do sistema e o programa contínuo de modernização o tornam uma escolha confiável para a maioria das aplicações.
Uma limitação do GPS é que seu desempenho pode degradar em altas latitudes (perto dos polos) devido à configuração da órbita dos satélites. Os sinais também podem ser afetados por desfiladeiros urbanos e folhagem densa, razão pela qual ter acesso a várias constelações é tão valioso.
GLONASS (GLObal NAvigation Satellite System)
A alternativa russa ao GPS tornou-se um complemento importante nos receptores modernos:
• País/Região: Rússia
• Operação Inicial: 1982 (limitada), Capacidade Operacional Total restaurada em 2011
• Satélites: 24 satélites operacionais
• Características Orbitais:
- Órbita Terrestre Média a aproximadamente 19.100 km
- 3 planos orbitais com 8 satélites cada
- Período orbital de 11 horas e 15 minutos
• Frequências de Sinal:
- L1 (1598,0625 - 1605,375 MHz)
- L2 (1242,9375 - 1248,625 MHz)
- L3 (1202,025 MHz)
• Precisão:
- Precisão Padrão: ~4-7 metros
- Alta Precisão: ~<1 metro (militar)
Adicionei a capacidade GLONASS aos meus drones por volta de 2022, e a melhoria foi imediatamente perceptível. O sistema tem um desempenho particularmente bom em altas latitudes – voei no norte da Noruega, onde os satélites GLONASS eram frequentemente mais numerosos do que o GPS na visão do meu receptor.
O GLONASS complementa extremamente bem o GPS em receptores combinados. Embora historicamente menos estável que o GPS (houve um período na década de 1990 em que o sistema quase entrou em colapso), o GLONASS moderno é muito confiável. Descobri que ter os dois sistemas ativos fornece uma excelente redundância – se um sistema tiver problemas, o outro mantém seu drone navegando com segurança.
Galileo
O GNSS controlado por civis da União Europeia é o mais novo grande player, e fiquei impressionado com seu desempenho:
• País/Região: União Europeia
• Operação Inicial: 2016 (serviços iniciais), Capacidade Operacional Total esperada até 2026
• Satélites: 28 planejados (24 operacionais + 4 reservas), 26 atualmente em órbita
• Características Orbitais:
- Órbita Terrestre Média a aproximadamente 23.222 km
- 3 planos orbitais com 8-10 satélites cada
- Período orbital de 14 horas
• Frequências de Sinal:
- E1 (1575,42 MHz) - Mesmo que GPS L1
- E5a (1176,45 MHz) - Mesmo que GPS L5
- E5b (1207,14 MHz)
- E6 (1278,75 MHz)
• Precisão:
- Serviço Aberto: ~1-3 metros
- Serviço de Alta Precisão: ~20 cm
- Serviço Público Regulamentado: Criptografado para uso governamental
Quando ativei o Galileo nos meus drones por volta de 2022, fiquei cético sobre se faria uma diferença perceptível. Para minha surpresa, fez – particularmente em ambientes urbanos onde os edifícios podem bloquear alguns sinais de satélite. Ter esses satélites Galileo adicionais em vista proporcionou um desempenho de navegação mais consistente.
O Galileo foi projetado especificamente para aplicações civis, com maior precisão do que o GPS padrão. Aprecio seu monitoramento avançado de integridade, que ajuda a detectar e mitigar sinais não confiáveis. O sistema também é totalmente interoperável com o GPS, tornando a integração perfeita em receptores modernos.
Embora o Galileo ainda não esteja em plena capacidade operacional, já está fornecendo um excelente serviço. A única limitação que encontrei é que alguns receptores mais antigos não o suportam, mas qualquer módulo GNSS moderno aproveitará ao máximo esses satélites.
BeiDou (BDS)
O sistema de navegação por satélite da China evoluiu rapidamente para se tornar um player global:
• País/Região: China
• Operação Inicial: BeiDou-1 (2000), BeiDou-2 (2012), BeiDou-3 (2020)
• Satélites: 35 satélites operacionais
• Características Orbitais:
- Mistura de Órbita Terrestre Média (27 satélites a 21.500 km)
- Órbita Terrestre Geoestacionária (5 satélites)
- Órbita Geossíncrona Inclinada (3 satélites)
• Frequências de Sinal:
- B1I (1561,098 MHz)
- B1C (1575,42 MHz) - Mesmo que GPS L1
- B2a (1176,45 MHz) - Mesmo que GPS L5
- B2b (1207,14 MHz) - Mesmo que Galileo E5b
- B3I (1268,52 MHz)
• Precisão:
- Serviço Global: ~3-5 metros
- Serviço Regional: ~2-3 metros
Comecei a usar receptores compatíveis com BeiDou por volta de 2022, e o sistema provou ser uma adição valiosa ao ecossistema GNSS. O aspecto único do BeiDou é seu design de constelação híbrida, com satélites em diferentes tipos de órbita. Isso fornece cobertura aprimorada na região Ásia-Pacífico, onde notei um desempenho particularmente forte.
Um recurso interessante do BeiDou que outros sistemas não possuem é sua capacidade de mensagens – o sistema pode realmente transmitir mensagens de texto curtas, embora isso normalmente não seja usado em aplicações de drones. O serviço global completo foi concluído em 2020, tornando o BeiDou o mais novo sistema de navegação global completo.
Na minha experiência, a integração do BeiDou tem sido perfeita em receptores modernos, embora a documentação em inglês fosse limitada nos primeiros dias. Hoje, é uma parte padrão dos receptores de constelação múltipla e contribui significativamente para o desempenho geral da navegação.
Sistemas Regionais
Além dos sistemas globais, existem vários sistemas GNSS regionais que podem fornecer benefícios adicionais em áreas específicas:
QZSS (Quasi-Zenith Satellite System)
• País/Região: Japão
• Cobertura: Japão e região Ásia-Oceania
• Satélites: 4 satélites operacionais
O QZSS é projetado para funcionar nos desfiladeiros urbanos do Japão, com satélites em órbitas que os mantêm em altas elevações sobre o Japão. Vi pessoas voando com receptores habilitados para QZSS em Tóquio, e a melhoria no desempenho urbano foi perceptível – as posições eram mais estáveis entre edifícios altos do que apenas com constelações globais.
NavIC (Navigation with Indian Constellation)
• País/Região: Índia
• Cobertura: Índia e região circundante (1.500 km)
• Satélites: 7 satélites operacionais
O NavIC é otimizado para o subcontinente indiano. Embora eu não o tenha testado extensivamente, colegas que voam na Índia relatam bons resultados quando seus receptores suportam este sistema regional além das constelações globais.
Benefícios de Constelações Múltiplas para Drones
O uso simultâneo de várias constelações GNSS oferece várias vantagens para operações com drones. Experimentei esses benefícios em primeira mão à medida que atualizei meus sistemas de navegação ao longo dos anos.
Maior Disponibilidade de Satélites
O benefício mais imediato dos receptores de constelações múltiplas é simplesmente ter mais satélites em vista:
• Mais Satélites Visíveis: Constelações combinadas fornecem mais de 30 satélites visíveis em condições de céu aberto. Eu regularmente vejo 20-25 satélites, em comparação com apenas 8-10 com GPS sozinho.
• Desempenho em Desfiladeiros Urbanos: Melhor posicionamento em cidades e áreas obstruídas. Voei entre edifícios onde receptores somente GPS perderiam o sinal, mas sistemas de constelações múltiplas mantiveram uma navegação estável.
• Redução da Diluição Geométrica da Precisão (GDOP): Mais satélites significam melhor geometria e posicionamento mais preciso. Isso se traduz em pairar e navegação mais precisos.
• Impacto Prático: Eu experimento menos interrupções de GPS durante o voo, particularmente em ambientes desafiadores. Isso salvou vários dos meus drones de potenciais fugas ou acidentes.
Precisão Aprimorada
Múltiplas constelações trabalhando juntas melhoram a precisão geral de posicionamento:
• Média de Erros: Múltiplos sistemas ajudam a calcular a média dos erros individuais do sistema. Observei a retenção de posição melhorando de ±3 metros apenas com GPS para precisão submétrica com receptores de constelação múltipla.
• Validação Cruzada: Posições de diferentes sistemas podem validar umas às outras, rejeitando outliers. Isso eliminou os ocasionais "saltos" de posição que eu costumava ver com receptores de constelação única.
• Precisão Aprimorada: Cálculos de posição usando mais satélites são geralmente mais precisos. Isso é particularmente perceptível na retenção de altitude, que tende a ser a dimensão mais fraca no posicionamento GNSS.
• Impacto Prático: Meus drones agora mantêm uma retenção de posição e navegação mais estáveis, tornando as missões autônomas mais confiáveis e as imagens de vídeo mais suaves.
Redundância do Sistema
Talvez o benefício mais importante para operações críticas de drones seja a redundância:
• Proteção contra Falhas: Se um sistema apresentar problemas, outros podem compensar. Uma vez voei através de uma área com interferência de GPS (provavelmente não intencional), mas meu drone continuou navegando normalmente usando GLONASS e Galileo.
• Resistência a Interferências: Diferentes frequências tornam a interferência completa mais difícil. Isso é particularmente importante para operações profissionais onde a integridade do sinal é crítica.
• Detecção de Spoofing: Discrepâncias entre sistemas podem indicar tentativas de spoofing. Embora raro, o spoofing de GPS é uma preocupação crescente para operações sensíveis de drones.
• Impacto Prático: Descobri que as funções de retorno ao ponto inicial e autônomas são significativamente mais confiáveis com receptores de constelação múltipla. Isso proporciona tranquilidade durante voos de longo alcance.
Aquisição Mais Rápida
Obter uma trava de posição rapidamente é importante para operações de campo eficientes:
• Processamento Paralelo: Os receptores podem adquirir sinais de múltiplos sistemas simultaneamente. Isso reduz drasticamente o tempo gasto esperando antes da decolagem.
• TTFF Reduzido: Estabelecimento de posição mais rápido na inicialização. O que costumava levar minutos agora leva segundos.
• Melhoria no Início a Frio: Particularmente benéfico para inícios a frio quando o receptor não possui dados recentes de satélite. Vi os tempos de início a frio caírem de mais de 60 segundos para menos de 30 segundos com receptores de constelação múltipla.
• Impacto Prático: A trava de GPS mais rápida antes da decolagem significa menos tempo de espera e mais tempo de voo. Isso é especialmente valioso em ambientes profissionais onde tempo é dinheiro.
Evolução do Receptor GNSS para Drones
Usei quase todas as gerações de receptores GNSS em meus drones, e a evolução tem sido notável. Cada geração trouxe melhorias significativas em desempenho, tamanho e capacidades.
Gerações de Receptores
GPS de Drone Inicial (2010-2014)
Meus primeiros drones equipados com GPS usavam módulos como o Ublox LEA-6 e NEO-6. Estes eram revolucionários na época, mas primitivos pelos padrões atuais:
• Características:
- Recepção apenas de GPS
- Taxas de atualização mais lentas (1-5Hz)
- Menor sensibilidade
- Tamanho maior
- Maior consumo de energia
• Desempenho:
- Precisão: 5-10 metros
- TTFF: 45-60 segundos de início a frio
- Capacidade de Satélites: 12-16 canais
Lembro-me da frustração de esperar por uma trava de GPS antes de cada voo, muitas vezes em pé em um campo aberto por vários minutos. A retenção de posição era aproximada na melhor das hipóteses, com o drone derivando vários metros em cada direção. O retorno ao ponto inicial era uma experiência de tirar o fôlego - você nunca sabia exatamente onde o drone decidiria que era "casa"!
GNSS de Geração Intermediária (2015-2018)
Em algum momento, atualizei para módulos como o Ublox NEO-7 e NEO-M8N, que trouxeram melhorias significativas:
• Características:
- Recepção GPS + GLONASS
- Taxas de atualização moderadas (5-10Hz)
- Sensibilidade aprimorada
- Fatores de forma menores
- Consumo de energia reduzido
• Desempenho:
- Precisão: 2-5 metros
- TTFF: 30-45 segundos de início a frio
- Capacidade de Satélites: 32-72 canais
A adição do GLONASS foi um divisor de águas para a confiabilidade. Notei imediatamente que meus drones manteriam a trava de posição em áreas onde antes lutavam. O M8N se tornou o carro-chefe da navegação de drones durante este período - ainda tenho vários drones voando com esses módulos hoje.
GNSS Moderno (2019-2022)
Em 2022, comecei a atualizar minha frota para módulos como o Ublox NEO-M9N e SAM-M8Q:
• Características:
- Multi-constelação (GPS, GLONASS, Galileo, BeiDou)
- Taxas de atualização mais rápidas (10-18Hz)
- Alta sensibilidade
- Designs compactos
- Operação eficiente em energia
• Desempenho:
- Precisão: 1-3 metros
- TTFF: 15-30 segundos de início a frio
- Capacidade de Satélites: 72-184 canais
A melhoria de desempenho foi substancial. A retenção de posição se tornou sólida como uma rocha, e a precisão de retorno ao ponto inicial melhorou para dentro de um metro do ponto de decolagem. A capacidade de usar todas as quatro principais constelações simultaneamente proporcionou excelente redundância e desempenho em ambientes desafiadores.
Última Geração (2023-Presente)
Minhas construções mais recentes usam módulos de ponta como o Ublox NEO-M10 e ZED-F9P (para aplicações RTK):
• Características:
- Multi-constelação completa, multi-frequência
- Altas taxas de atualização (até 25Hz)
- Sensibilidade extremamente alta
- Pacotes ultra-compactos
- Consumo de energia muito baixo
- Capacidade RTK em modelos de ponta
• Desempenho:
- Precisão: 0,5-2 metros (padrão), 1-3cm (RTK)
- TTFF: 5-15 segundos de início a frio
- Capacidade de Satélites: mais de 184 canais
Estes módulos mais recentes representam um salto quântico em desempenho. A série M10 oferece sensibilidade excepcional e eficiência energética, enquanto o F9P traz precisão RTK de nível de pesquisa para drones de consumo. Fiquei particularmente impressionado com seu desempenho em ambientes desafiadores, como áreas urbanas e dossel florestal leve.
Olhada Detalhada nos Módulos GNSS Populares para Drones
Ao longo dos anos, usei a maioria dos módulos GNSS populares em várias construções. Aqui está minha avaliação de suas capacidades e aplicações ideais:
Ublox NEO-M8N
O carro-chefe do GNSS de drones por muitos anos, e ainda amplamente utilizado:
• Constelações: GPS, GLONASS, Galileo, BeiDou (recepção simultânea de até 3)
• Canais: 72 canais de rastreamento
• Taxa de Atualização: Até 10Hz (tipicamente 5Hz em drones)
• Sensibilidade: -167dBm de rastreamento
• Precisão: 2,5m CEP (Erro Circular Provável)
• Consumo de Energia: 23mA @ 3,3V
Instalei dezenas de módulos M8N em vários drones e eles oferecem um excelente equilíbrio entre desempenho e custo. O módulo suporta a recepção simultânea de até três constelações, embora eu normalmente use GPS+GLONASS para a melhor combinação de desempenho e eficiência energética.
Uma limitação que descobri é que habilitar todas as constelações simultaneamente às vezes pode causar problemas de rastreamento devido às limitações de canais. Para a maioria das aplicações, GPS+GLONASS ou GPS+Galileo fornece os melhores resultados.

O M8N ainda é uma ótima escolha para navegação de uso geral, retorno ao ponto de partida e manutenção de posição. Implementações comuns incluem o BN-180, BN-220 e muitos módulos FC integrados.
Ublox NEO-M9N
O sucessor atualizado do M8N, oferecendo melhorias significativas:
• Constelações: GPS, GLONASS, Galileo, BeiDou (recepção simultânea de todos)
• Canais: 184 canais de rastreamento
• Taxa de Atualização: Até 25Hz (normalmente 10Hz em drones)
• Sensibilidade: -167dBm rastreamento
• Precisão: 1,5m CEP (Erro Circular Provável)
• Consumo de Energia: 45mA @ 3,3V (aquisição), 34mA (rastreamento)
Quando atualizei meu principal drone de longo alcance de um M8N para um M9N, a diferença foi imediatamente perceptível. O M9N pode rastrear todas as constelações simultaneamente sem limitações de canais, proporcionando excelente redundância e desempenho.
A taxa de atualização mais alta (10Hz vs. 5Hz) resulta em uma navegação mais suave e ajustes de posição mais responsivos. Achei o M9N particularmente valioso para navegação de precisão e missões de waypoint, onde a precisão aprimorada faz uma diferença notável.

Uma desvantagem é o consumo de energia um pouco maior, embora ainda seja insignificante no contexto do uso geral de energia do drone. Implementações comuns incluem o Matek M9N-5883 e o HGLRC M9N.
Ublox NEO-M10S
A mais recente geração de GNSS padrão, expandindo os limites de desempenho:
• Constelações: GPS, GLONASS, Galileo, BeiDou, QZSS, NavIC (recepção simultânea de todos)
• Canais: 184+ canais de rastreamento
• Taxa de Atualização: Até 25Hz
• Sensibilidade: -170dBm rastreamento
• Precisão: 1,0m CEP (Erro Circular Provável)
• Consumo de Energia: 38mA @ 3,3V (potência total), 12mA (economia de energia)
Recentemente, comecei a testar a série M10 em minhas construções mais novas e as melhorias são sutis, mas significativas. O recurso de destaque é a excepcional eficiência energética - o modo Super-E pode reduzir o consumo de energia em até 70%, mantendo o desempenho.
A sensibilidade aprimorada (-170dBm vs. -167dBm) se traduz em melhor desempenho em ambientes desafiadores, como cânions urbanos ou sob cobertura leve de árvores. Notei um rastreamento de satélite mais consistente em áreas onde as gerações anteriores ocasionalmente perdiam o sinal.

O M10 é ideal para missões de longo alcance onde a eficiência energética é importante e para voar em ambientes desafiadores. Ainda é relativamente novo no mercado de drones, mas espero que se torne o novo padrão à medida que a disponibilidade melhorar.
Ublox ZED-F9P
O módulo de alta precisão com capacidade RTK para aplicações profissionais:
• Constelações: GPS, GLONASS, Galileo, BeiDou (recepção simultânea de todos)
• Canais: 184 canais de rastreamento
• Taxa de Atualização: Até 25Hz
• Sensibilidade: -167dBm rastreamento
• Precisão: 1,0m CEP padrão, 1cm + 1ppm com RTK
• Consumo de Energia: 68mA @ 3,3V
Para meus drones de mapeamento e pesquisa, o F9P tem sido transformador. A recepção multibanda (L1/L2/L5) e a capacidade RTK permitem posicionamento em nível de centímetros, o que é essencial para aplicações de precisão.
A configuração do RTK requer componentes adicionais - uma estação base ou serviço NTRIP para correções, além de um link de dados para transmitir essas correções para o drone. Eu uso uma conexão 4G/LTE para meu drone de pesquisa, o que me permite receber correções NTRIP de serviços públicos.

O F9P é exagero para drones FPV ou fotográficos padrão, mas é inestimável para aplicações de mapeamento, pesquisa, agricultura de precisão e pouso automatizado. Implementações comuns incluem o Here3 e o Holybro H-RTK F9P.
Guia de Seleção de Módulos
A escolha do módulo GNSS certo depende de suas necessidades específicas. Aqui está meu conselho prático baseado em anos construindo e voando diferentes configurações:
Para Navegação Básica
• Recomendado: NEO-M8N ou equivalente
• Considerações Principais:
- Adequado para RTH e manutenção de posição
- Bom equilíbrio entre desempenho e custo
- Amplamente suportado em todos os firmwares de navegação
- Normalmente inclui bússola
Eu ainda uso módulos M8N em muitas das minhas construções porque eles são econômicos e têm bom desempenho para navegação geral. Se você está construindo um drone FPV padrão com necessidades ocasionais de manutenção de posição e retorno ao ponto de partida, o M8N ainda é uma ótima escolha.
Para Navegação Avançada
• Recomendado: NEO-M9N ou equivalente
• Considerações Principais:
- Melhor para missões de waypoint
- Atualizações de posição mais rápidas
- Mais confiável em ambientes desafiadores
- Vale a pena atualizar para navegação séria
Para meus drones autônomos de waypoint e construções de longo alcance, padronizei no M9N. A precisão aprimorada e a taxa de atualização fazem uma diferença perceptível no desempenho da navegação, e a capacidade de usar todas as constelações simultaneamente melhora a confiabilidade em ambientes variados.
Para Aplicações Profissionais
• Recomendado: NEO-M10 ou ZED-F9P
• Considerações Principais:
- M10 para o melhor desempenho GNSS padrão
- F9P quando precisão centimétrica é necessária
- Considere as implicações de energia e peso
- Pode exigir configuração e ajustes adicionais
Meus drones de pesquisa e mapeamento usam o F9P para posicionamento com precisão centimétrica. Para exploração de longo alcance onde a precisão padrão de nível de metro é suficiente, mas a confiabilidade é primordial, o M10 fornece a melhor combinação de desempenho e eficiência energética.
Para Longo Alcance/Resistência
• Recomendado: NEO-M10 com gerenciamento de energia
• Considerações Principais:
- Eficiência energética se torna crítica
- Confiabilidade é primordial
- Considere a qualidade e posicionamento da antena
- Sistemas de navegação de backup recomendados
Para minhas construções de alcance mais longo, eficiência energética e confiabilidade são as principais prioridades. O modo Super-E do M10 fornece excelente economia de energia enquanto mantém o desempenho. Também presto atenção especial à qualidade e posicionamento da antena, já que a recepção do sinal se torna cada vez mais importante quanto mais longe você voa.
Implementação do Módulo GNSS
Como você implementa seu módulo GNSS pode ser tão importante quanto qual módulo você escolhe. Aprendi muitas lições sobre a instalação ideal por tentativa e erro.
Integração de Hardware
Considerações sobre a Antena
A antena é crítica para o desempenho do GNSS – uma lição que aprendi da maneira mais difícil após várias construções com posicionamento de antena abaixo do ideal:
• Antenas Patch: Mais comuns em módulos de drone
- Vantagens: Compactas, direcionais para cima, boa visão do céu
- Desvantagens: O desempenho varia com a orientação
- Melhores Práticas: Monte plana com visão clara do céu

A maioria dos meus drones usa antenas patch, que funcionam bem quando montadas planas na placa superior com uma visão clara do céu. Descobri que mesmo uma leve inclinação pode reduzir o desempenho, então tenho cuidado para garantir que a antena esteja perfeitamente nivelada.
• Antenas Helicoidais: Encontradas em alguns módulos de alto desempenho
- Vantagens: Melhor recepção em baixas elevações, menos sensível à orientação
- Desvantagens: Maiores, mais caras
- Melhores Práticas: Ainda precisa de exposição razoável ao céu

Para minhas construções de longo alcance, prefiro antenas helicoidais apesar de seu tamanho maior. Elas são menos sensíveis à orientação e fornecem melhor recepção quando o drone está inclinado durante curvas, o que ajuda a manter a trava de satélite durante manobras agressivas.
• Antenas Externas: Opção para alguns módulos
- Vantagens: Posicionamento flexível, potencialmente melhor desempenho
- Desvantagens: Peso adicional, complexidade, potencial de danos
- Melhores Práticas: Use cabo de alta qualidade, minimize o comprimento
Eu uso antenas externas nos meus drones de mapeamento para separar a antena das fontes de interferência. A chave é usar cabos curtos e de alta qualidade – aprendi por experiência que cabos baratos podem degradar significativamente o sinal.
Plano de Terra
O plano de terra afeta o desempenho da antena – um detalhe que muitos construtores negligenciam:
• Propósito: Reflete sinais e melhora a recepção
• Implementação: Placa de metal ou área de PCB sob a antena
• Tamanho: Idealmente pelo menos 60-80mm de diâmetro para desempenho ideal
• Alternativas: Alguns módulos incluem plano de terra embutido

Depois de experimentar diferentes configurações de plano de terra, descobri que um simples disco de alumínio (cerca de 70mm de diâmetro) sob o módulo GNSS pode melhorar a recepção em 2-3dB – equivalente a 30-50% de melhor sensibilidade. Para módulos sem planos de terra embutidos, essa simples adição faz uma diferença perceptível na aquisição e retenção de satélites.
Local de Montagem
Onde você coloca o módulo GNSS importa significativamente:
• Montagem em Pilha: Dentro do quadro
- Vantagens: Proteção contra quedas
- Desvantagens: Potencial interferência de eletrônicos, visão do céu bloqueada
- Melhores Práticas: Apenas com módulos de alta sensibilidade, bloqueio de fibra de carbono
Tentei montar módulos GNSS em pilha dentro do quadro, mas os resultados foram decepcionantes devido ao bloqueio de sinal da placa superior. Só recomendo essa abordagem para construções muito pequenas onde a montagem superior não é prática, e apenas com módulos de alta sensibilidade.
• Placa Superior: Local mais comum
- Vantagens: Visão clara do céu, longe de interferências do solo
- Desvantagens: Exposição a danos por colisão
- Melhores práticas: Centro do drone, se possível

A maioria dos meus drones tem o módulo GNSS montado na placa superior, o que fornece a melhor visão do céu. Eu normalmente o posiciono na parte traseira em uma bandeja de extensão impressa em 3D para equilíbrio e para minimizar o impacto da inclinação da estrutura durante o voo.
• Montagem em Mastro: Elevado acima da estrutura
- Vantagens: Excelente visão do céu, interferência reduzida
- Desvantagens: Vulnerabilidade a colisões, peso adicional
- Melhores práticas: Usar com caixa protetora

Para meus drones de mapeamento, onde o desempenho do GNSS é crítico, eu uso montagens em mastro para elevar a antena acima de todas as fontes potenciais de interferência. A chave é usar uma caixa protetora ou design que possa resistir a colisões - eu perdi algumas antenas aprendendo essa lição!
Mitigação de Interferência
Os sinais GNSS são muito fracos e suscetíveis a interferências - um fato com o qual me familiarizei intimamente ao solucionar problemas de recepção ruim:
• Fontes de Interferência:
- Sistemas de distribuição de energia
- Transmissores de vídeo
- Ruído de motores e ESCs
- Bloqueio por fibra de carbono
- Outros sistemas de rádio
• Estratégias de Mitigação:
- Manter distância de fios de energia e VTX
- Usar cabos blindados para o módulo GNSS
- Adicionar núcleos de ferrite aos cabos de alimentação
- Considerar material de blindagem RF
- Manter antenas longe de fibra de carbono
Uma das maiores lições que aprendi é a importância de manter a antena GNSS longe de transmissores de vídeo. Em uma montagem, eu tive problemas persistentes de recepção até perceber que a antena VTX estava a apenas 3cm da antena GPS. Movê-la para a extremidade oposta da estrutura resolveu imediatamente o problema.
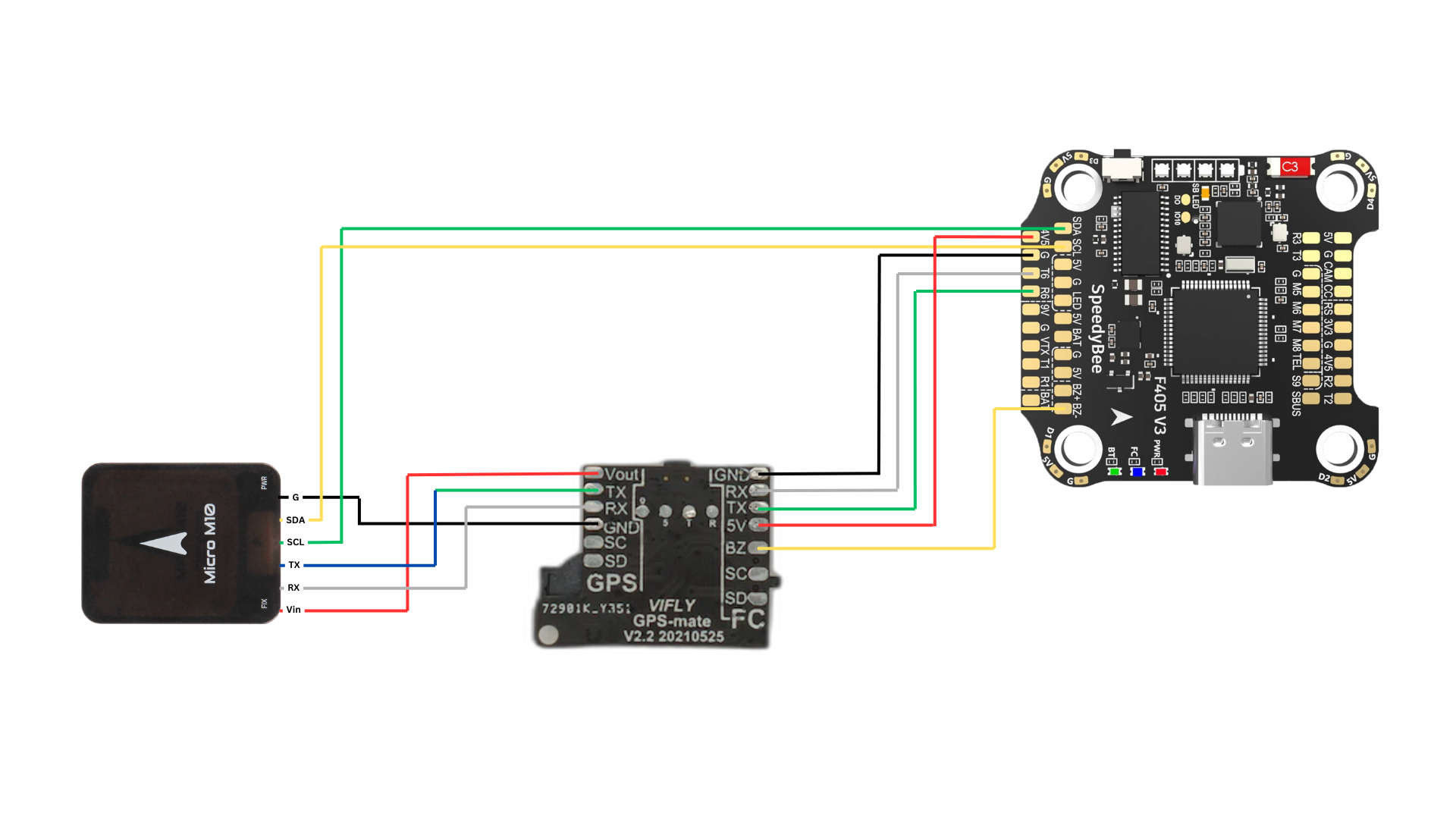
Infelizmente, na maioria das minhas montagens, o espaço se torna uma preocupação e nem sempre tenho a possibilidade de colocar o módulo GPS completamente isolado de outras antenas. Nesses casos, produtos como o GPS-mate são verdadeiros salvadores.

Para montagens com placas superiores de fibra de carbono, sempre uso um espaçador não condutivo para elevar o módulo GNSS pelo menos 10-15mm acima da fibra de carbono. Essa simples mudança pode melhorar drasticamente a recepção, evitando que a fibra de carbono bloqueie os sinais de satélite.
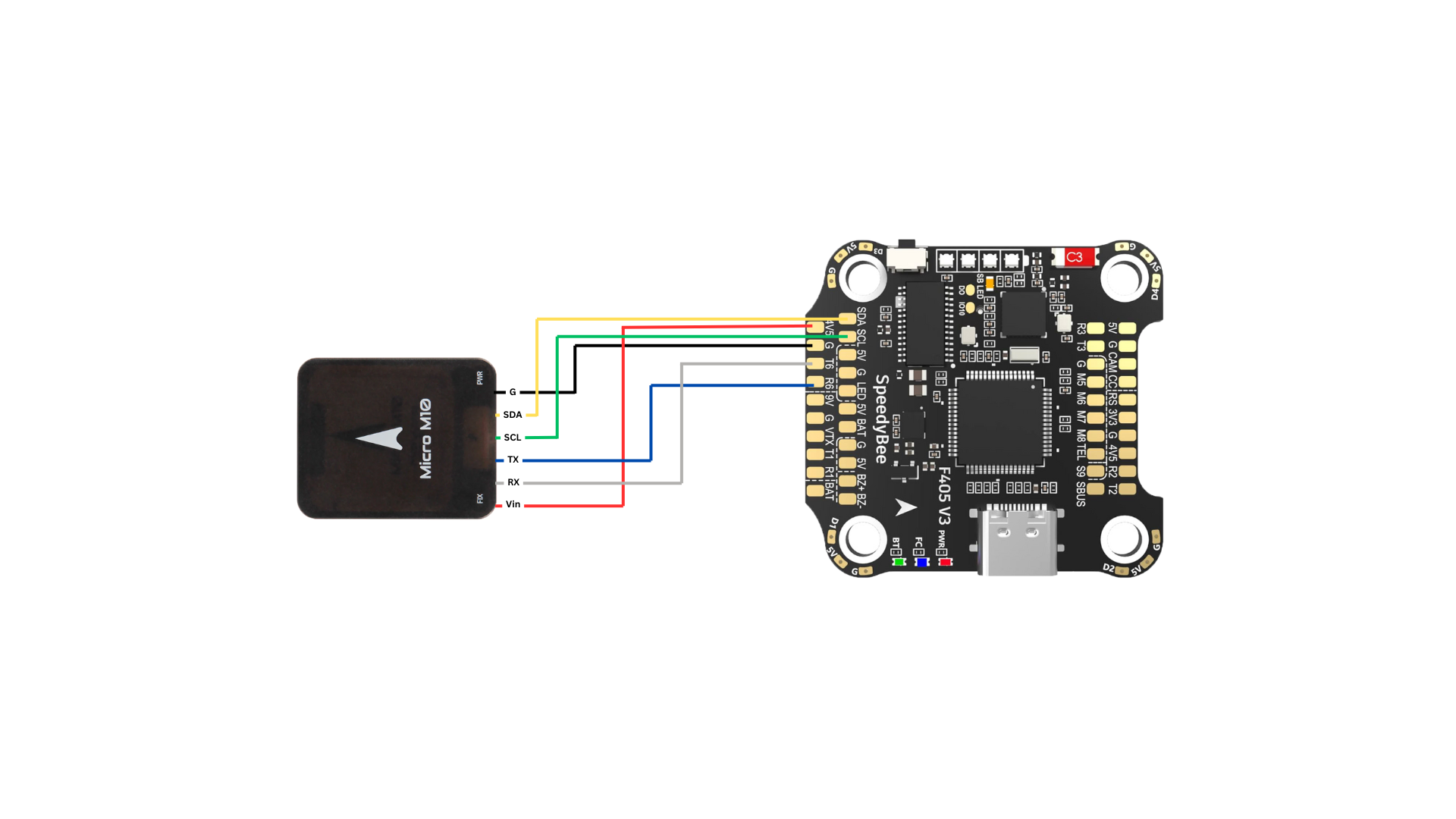
Fiação
Configuração de Software
Configurações de Firmware
O firmware moderno do controlador de voo oferece várias opções de configuração GNSS. Aqui está o que descobri que funciona melhor em diferentes sistemas:
Configurações GNSS do INAV
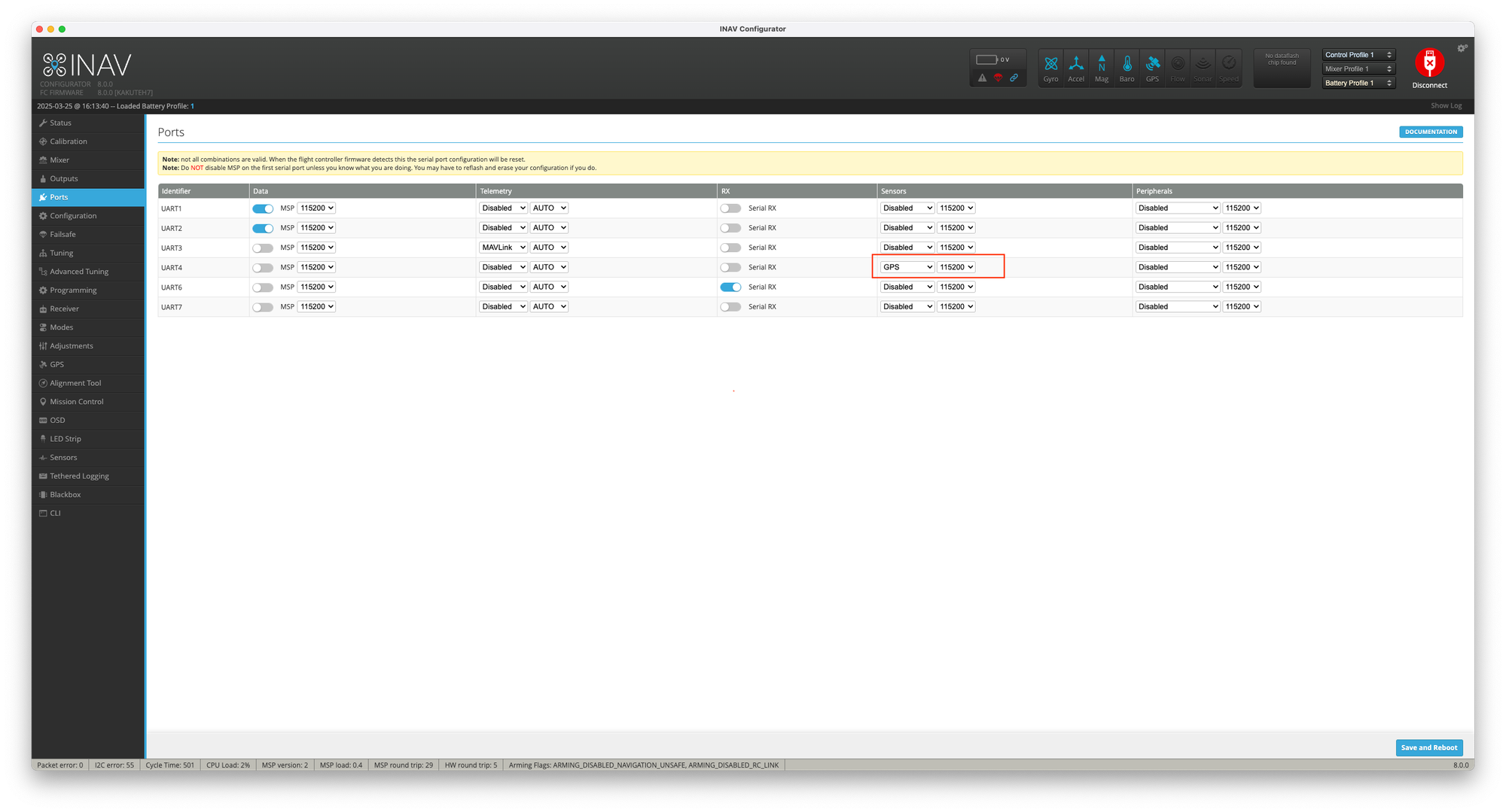
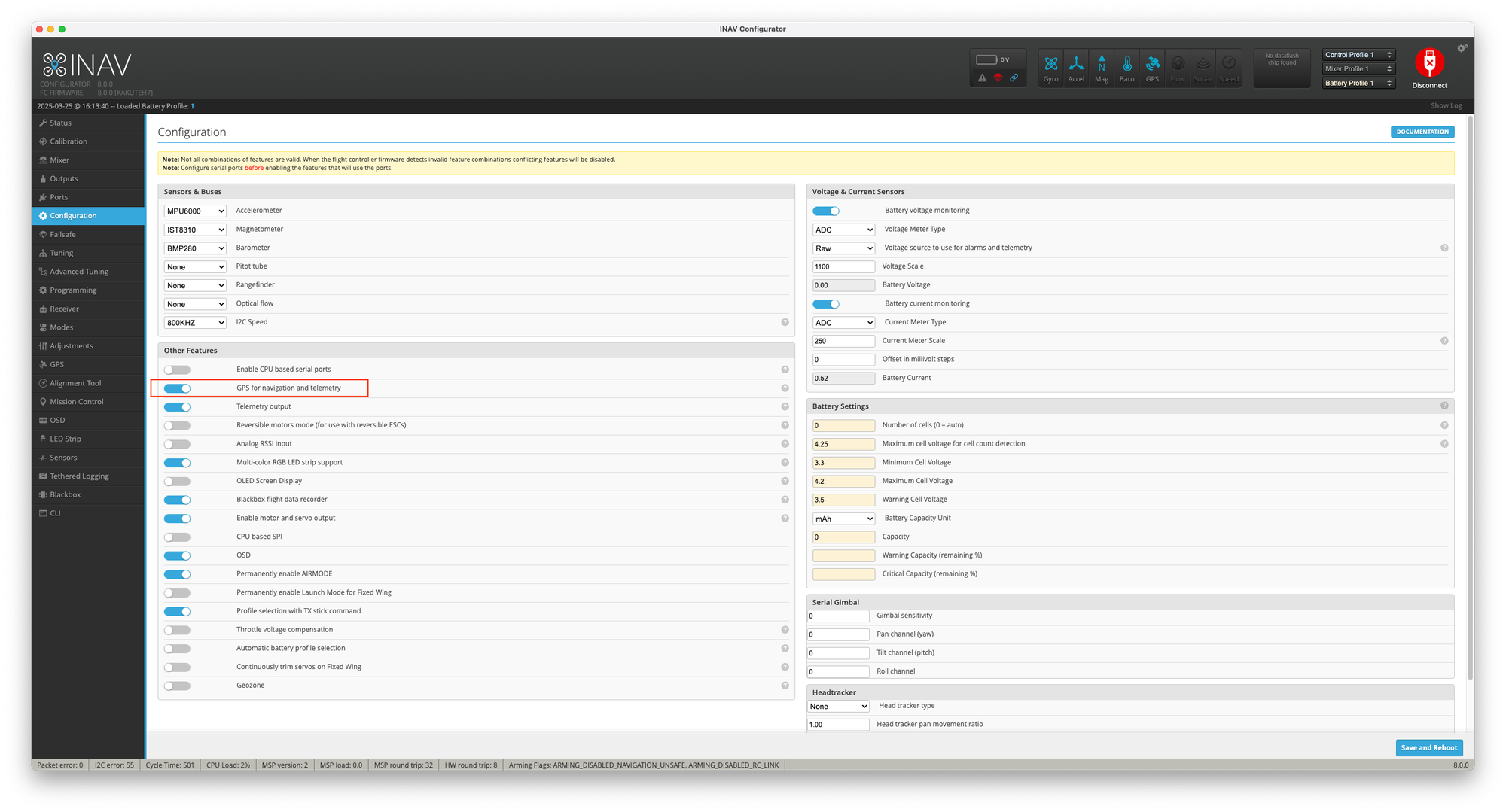
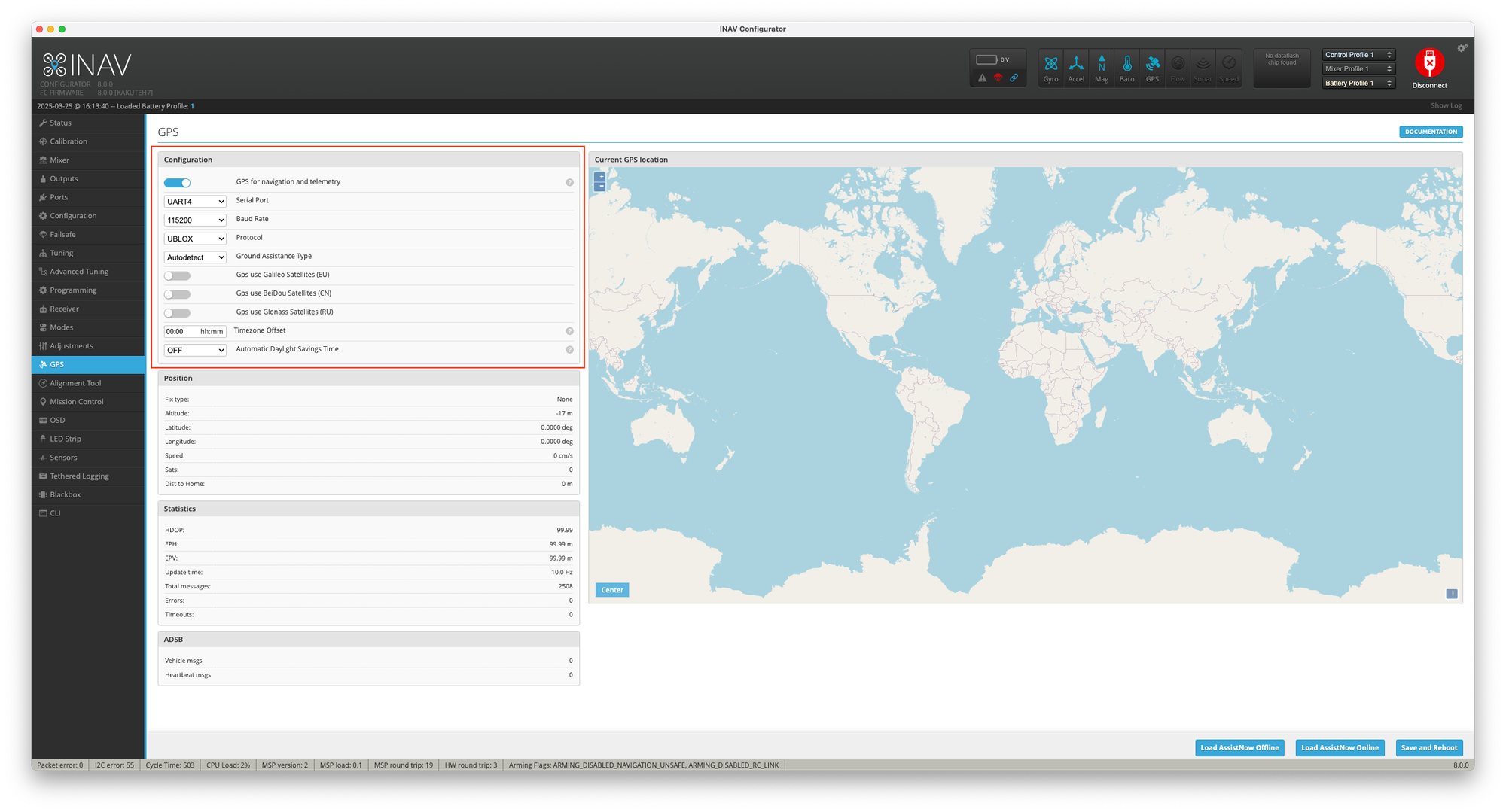
Descobri que combinar GNSS com dados do barômetro fornece a altitude mais estável. Adicionar o magnetômetro (UBLOX+BARO+MAG) pode melhorar a estimativa de posição em alguns casos, mas é mais suscetível a interferências. Está se tornando uma tendência se afastar dos magnetômetros à medida que a precisão do posicionamento GPS evolui.
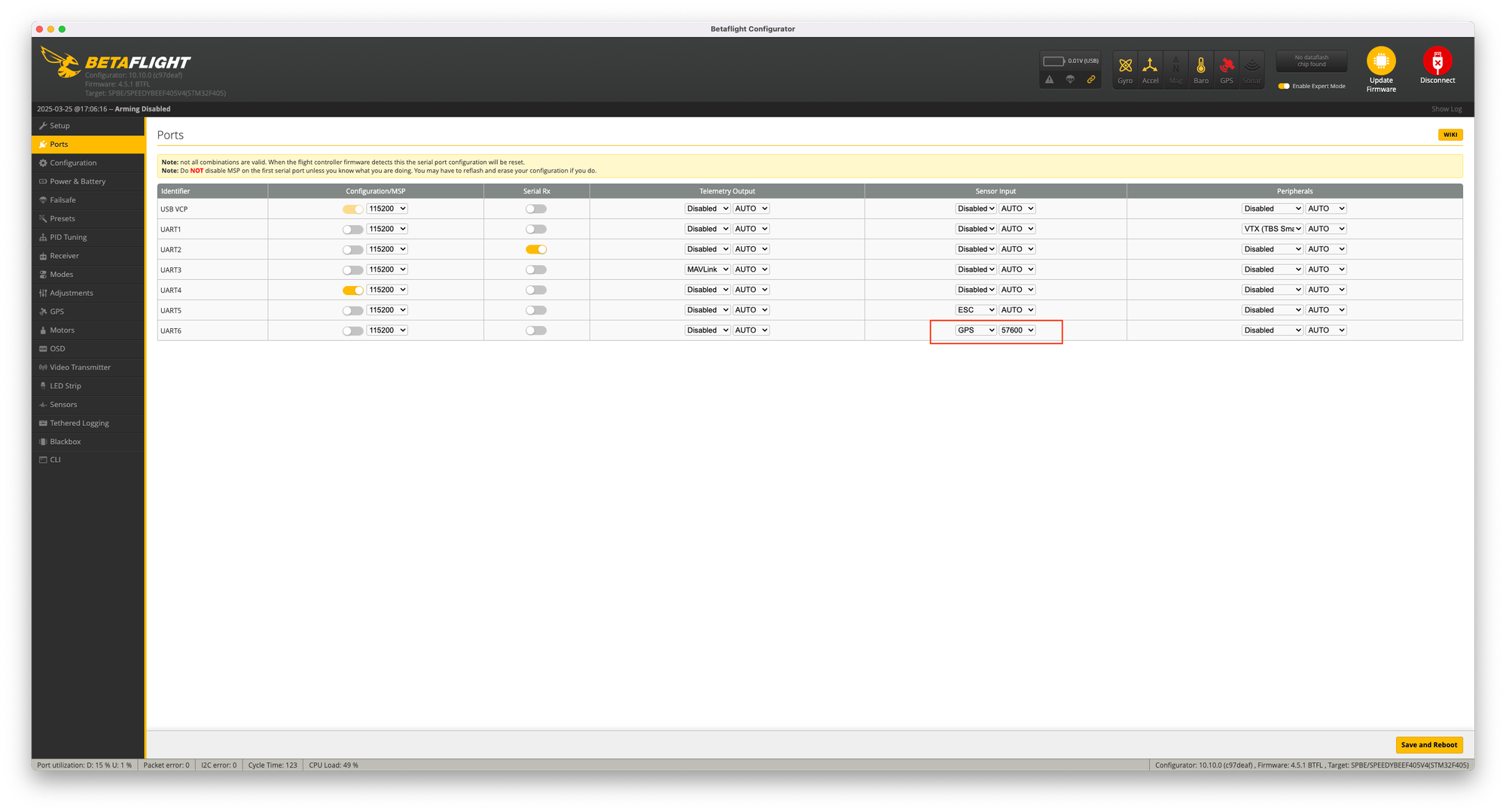
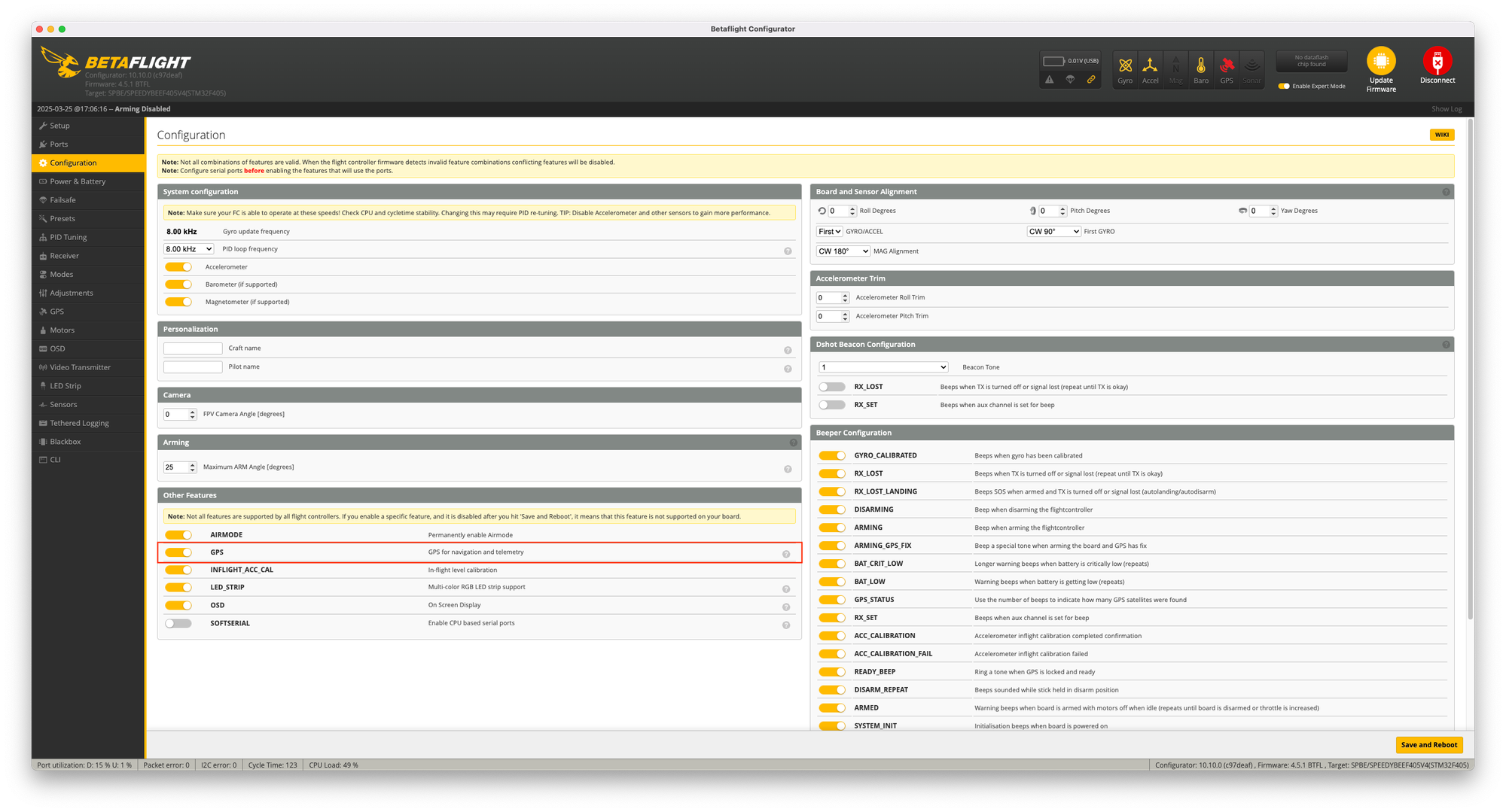
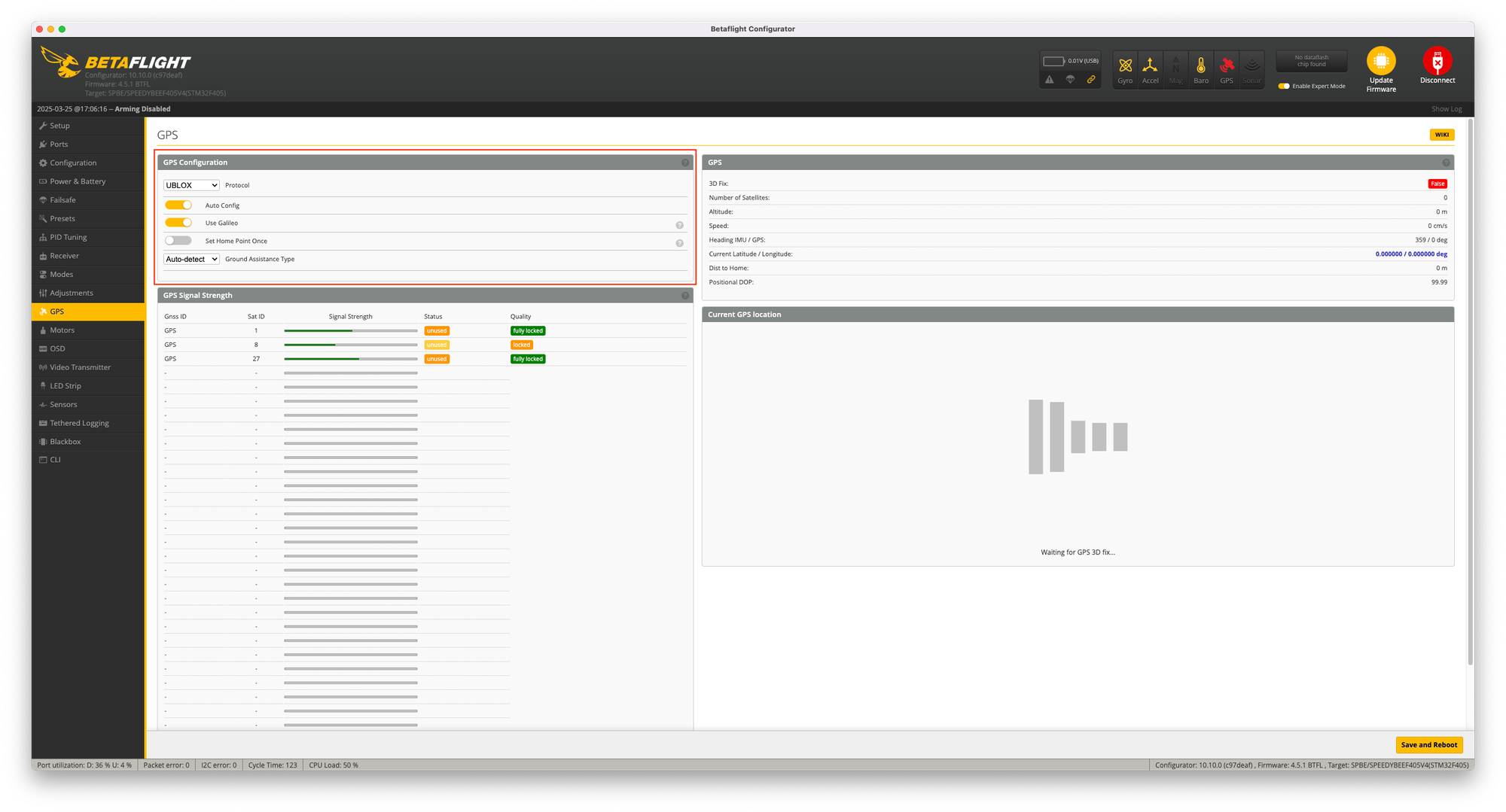
Configurações de GPS do Betaflight
Para minhas construções de freestyle e corrida com capacidade de resgate por GPS, uso a seguinte configuração padrão:
Tópicos Avançados de GNSS
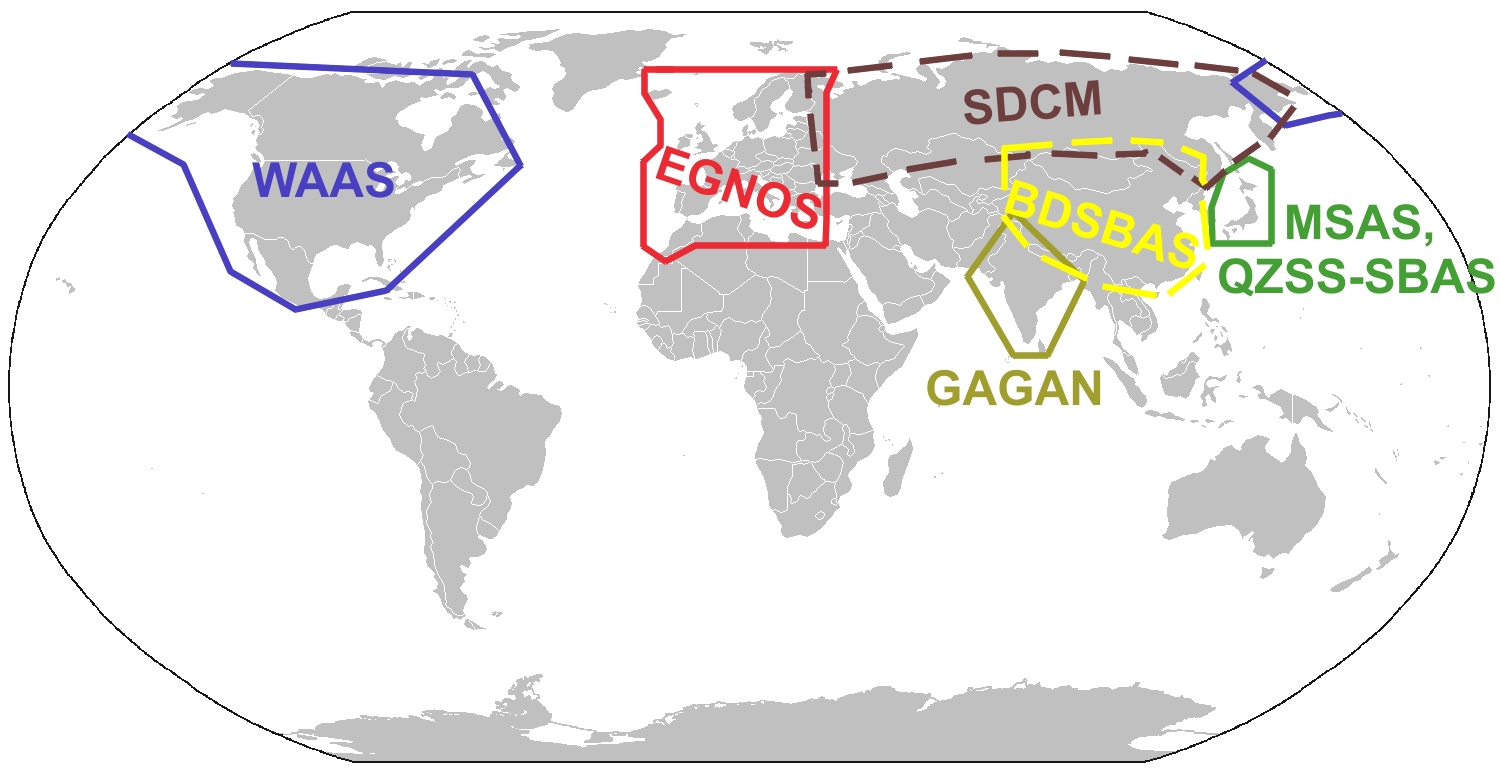
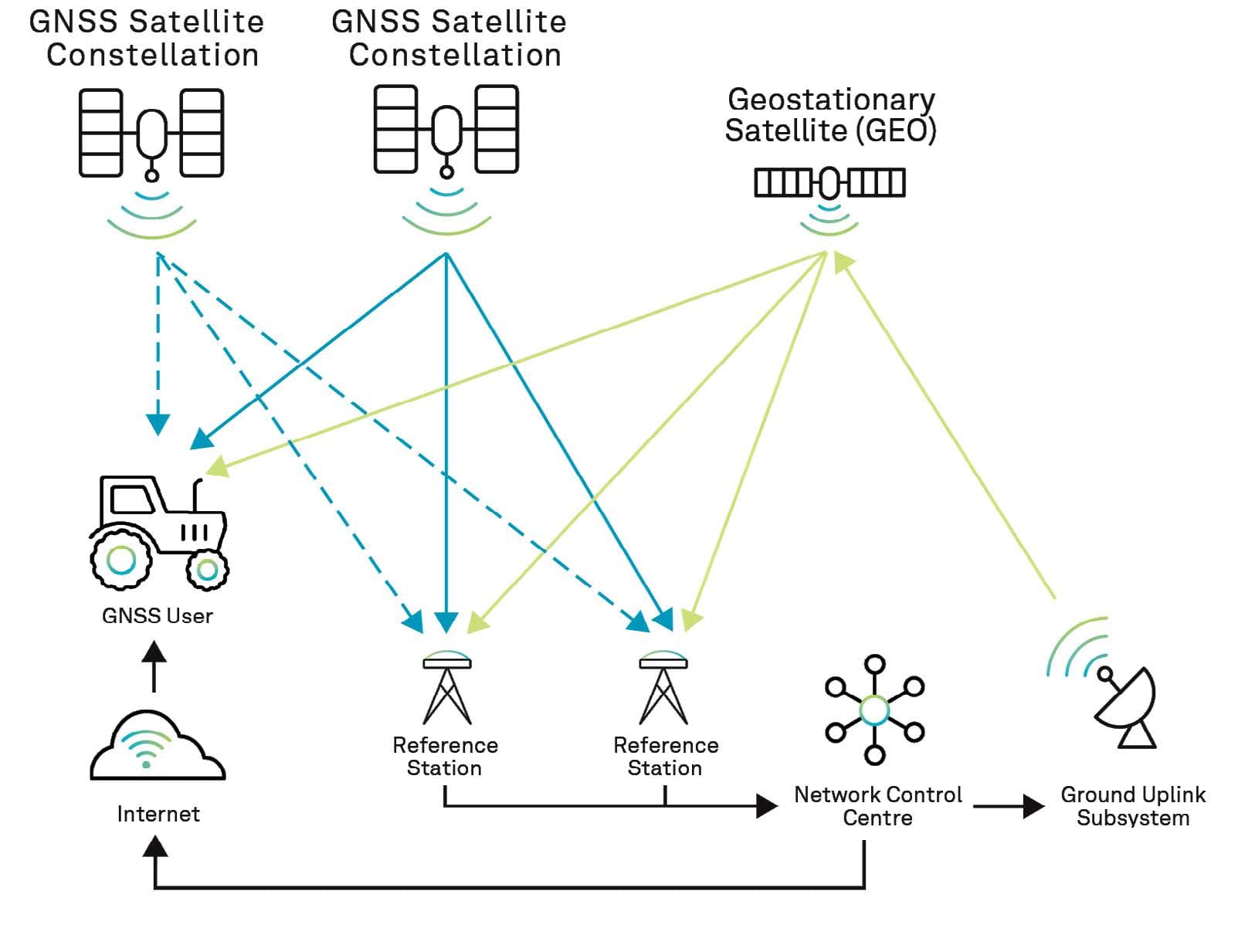
SBAS (Sistema de Aumento Baseado em Satélite)
Os sistemas regionais que melhoram a precisão do GNSS têm sido um benefício significativo na minha experiência:
• WAAS (Wide Area Augmentation System): América do Norte
• EGNOS (European Geostationary Navigation Overlay Service): Europa
• MSAS (Multi-functional Satellite Augmentation System): Japão
• GAGAN (GPS Aided GEO Augmented Navigation): Índia
• SDCM (System for Differential Corrections and Monitoring): Rússia
Esses sistemas fornecem dados de correção que podem melhorar a precisão de 3-5m para 1-2m. Notei os benefícios mais claramente ao voar na Europa com EGNOS e na América do Norte com WAAS. As correções são particularmente valiosas para a precisão da altitude, que normalmente é a dimensão mais fraca no posicionamento GNSS.
Além das melhorias de precisão, os sistemas SBAS também fornecem monitoramento de integridade, o que ajuda a identificar sinais de satélite não confiáveis. Isso é valioso para aplicações críticas de segurança, onde saber quando não confiar nos dados de posição é tão importante quanto ter dados precisos.
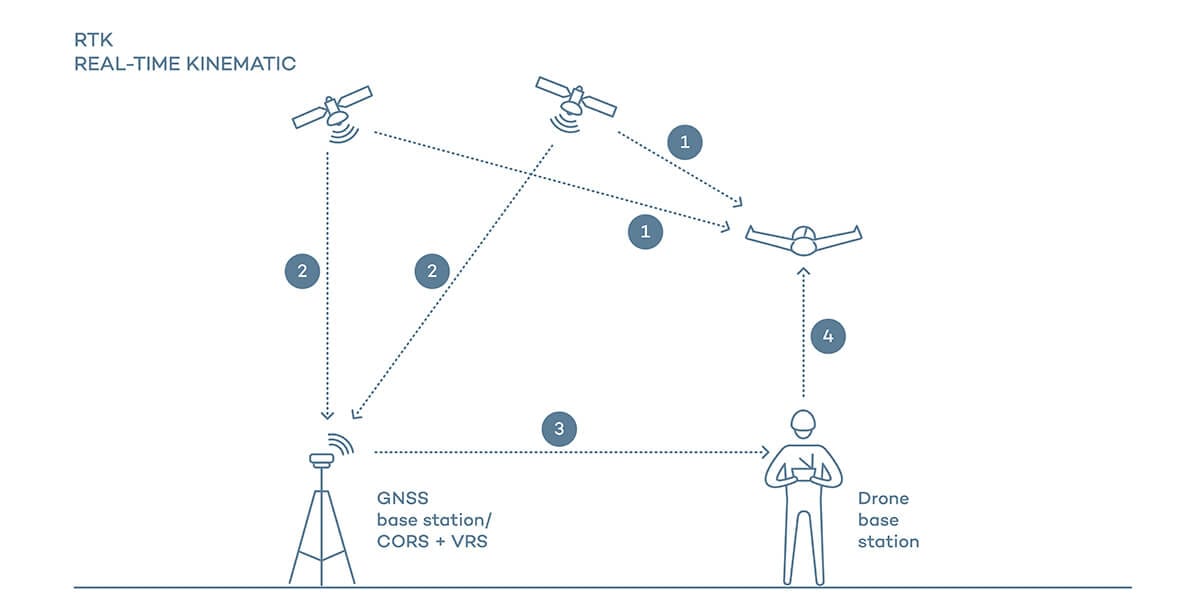
RTK (Cinemática em Tempo Real)
Para meus drones de mapeamento e pesquisa, o RTK tem sido transformador:
Princípio Básico: Medições de fase da portadora para precisão centimétrica
Componentes:
- Estação Base: Referência de posição fixa
- Rover: Receptor móvel no drone
- Link de Correção: Conexão de rádio ou rede
Precisão: Normalmente 1-3cm em condições ideais
Configurar o RTK requer mais componentes e complexidade, mas os resultados valem a pena para aplicações de precisão. Eu uso uma conexão 4G/LTE para receber correções NTRIP de serviços públicos, o que elimina a necessidade de uma estação base local.
As principais limitações que encontrei com o RTK são:
- Requer visão clara do céu
- Estação base dentro de ~10km (embora o RTK de rede estenda isso)
- Link de dados de correção confiável
- Período de inicialização necessário
Para a maioria dos voos recreativos, o RTK é exagero. Mas para mapeamento, levantamento, agricultura de precisão e pouso automatizado, é inestimável. A capacidade de retornar repetidamente à mesma posição exata com precisão centimétrica abre muitas aplicações profissionais.
PPP (Posicionamento por Ponto Preciso)
Para alguns dos meus voos de exploração remota onde o RTK não é prático:
• Princípio Básico: Usa dados precisos de órbita e relógio de satélite
• Vantagem: Nenhuma estação base necessária
• Desvantagem: Tempo de convergência mais longo (minutos a horas)
• Precisão: Nível decimétrico (10-30cm)
O PPP é menos comum em aplicações de drones devido aos requisitos de tempo de convergência, mas é uma técnica valiosa para certas aplicações especializadas. Eu o usei para missões de mapeamento de longa duração, onde o drone tem tempo para alcançar a convergência antes de iniciar o padrão de mapeamento.
Recepção Multi-Banda
Os mais recentes módulos de ponta, como o ZED-F9P, usam múltiplas bandas de frequência:
• Frequência Única: A maioria dos GNSS de drones (L1/E1/B1)
• Frequência Dupla: Módulos de ponta (L1+L5/E5/B2)
• Vantagens:
- Melhor mitigação de multicaminho
- Inicialização RTK mais rápida
- Precisão aprimorada
- Melhor desempenho em ambientes desafiadores
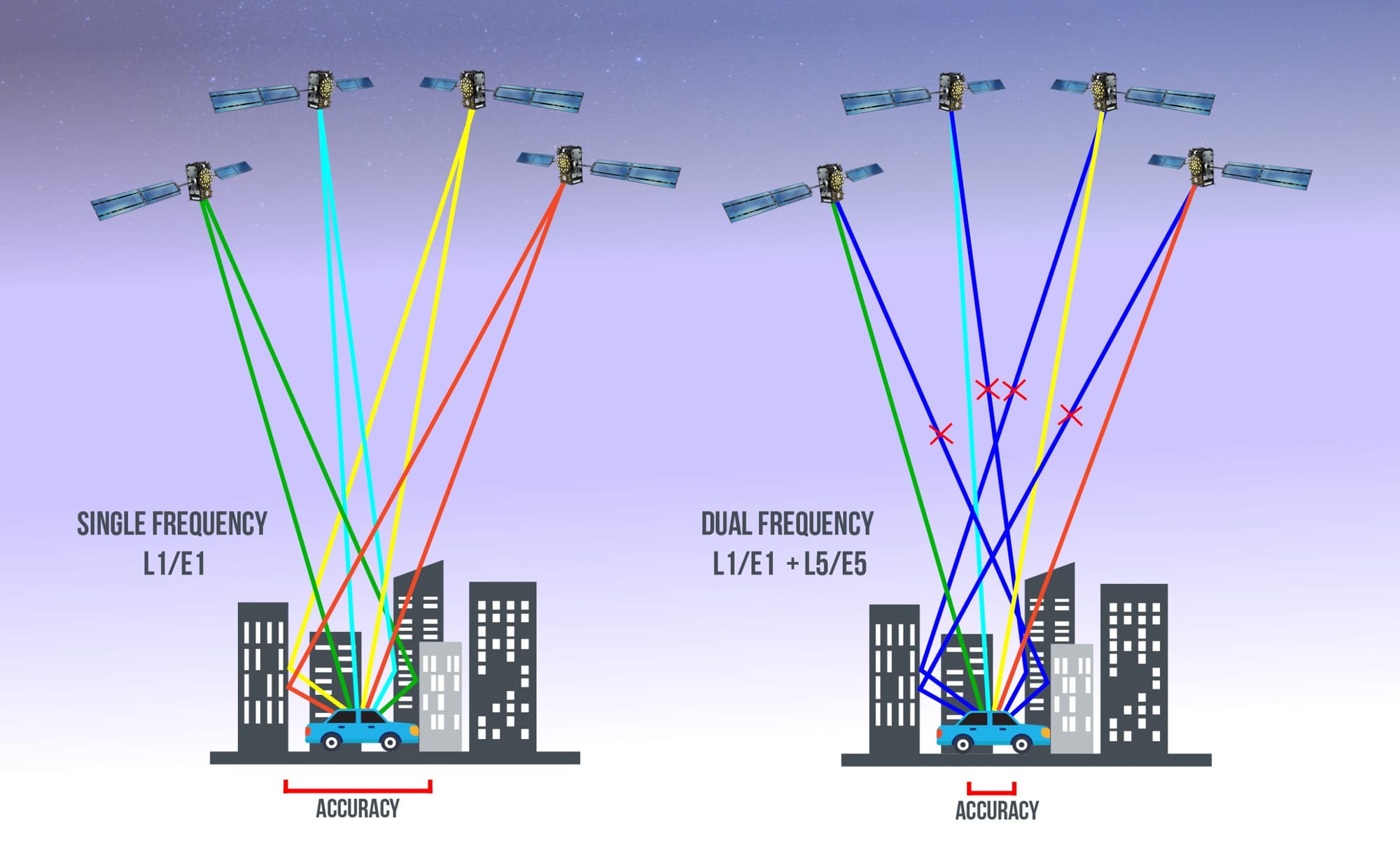
A diferença é perceptível – meu drone de pesquisa equipado com F9P atinge a fixação RTK muito mais rápido do que os sistemas RTK de frequência única mais antigos que usei. A mitigação de multicaminho é particularmente valiosa em ambientes com superfícies refletivas, como água ou edifícios.
Solucionando Problemas de GNSS
Ao longo dos anos, encontrei e resolvi inúmeros problemas de GNSS. Aqui estão os problemas mais comuns e suas soluções:
Recepção Ruim de Satélite
Sintomas:
- Poucos satélites adquiridos
- Altos valores de HDOP
- Dados de posição inconsistentes
- Perda frequente de GNSS
Soluções:
- Melhorar o posicionamento da antena – vi melhorias dramáticas apenas movendo a antena alguns centímetros para longe de fontes de interferência.
- Afastar-se de fontes de interferência – particularmente transmissores de vídeo e fios de energia.
- Usar módulo de multi-constelação – mais satélites significam mais chances de boa recepção.
- Verificar obstruções físicas – a fibra de carbono é particularmente problemática.
- Verificar a conexão da antena – conexões soltas podem causar problemas intermitentes.
Uma vez passei horas solucionando problemas de recepção ruim em uma nova construção, apenas para descobrir que a placa superior de fibra de carbono estava bloqueando os sinais. Adicionar um espaçador de 15mm para elevar o módulo resolveu o problema instantaneamente.
Aquisição Lenta de Satélite
Sintomas:
- Longo tempo para a primeira fixação
- Bloqueio de GPS atrasado antes do voo
Soluções:
- Atualizar para um módulo mais novo – cada geração tem tempos de aquisição aprimorados.
- Habilitar todas as constelações disponíveis – mais satélites significam aquisição mais rápida.
- Definir o modelo dinâmico apropriado – usar "Pedestre" para um drone pode retardar a aquisição.
- Garantir que a tensão da bateria esteja estável – quedas de tensão podem reiniciar o processo de aquisição.
- Considerar antena externa para ambientes desafiadores – às vezes a antena embutida simplesmente não é suficiente.
Descobri que manter o receptor alimentado entre os voos (usando uma pequena bateria) pode reduzir drasticamente o tempo de aquisição, mantendo os dados de efemérides.
Deriva de Posição
Sintomas:
- A retenção de posição se move gradualmente
- O RTH pousa longe do ponto de decolagem
- Waypoints não seguidos com precisão
Soluções:
- Aguarde por uma melhor cobertura de satélite (HDOP mais baixo) – Eu sempre espero por um HDOP < 2.0 antes de confiar nos dados de posição.
- Aumente o requisito mínimo de satélites – mais satélites geralmente significa melhor precisão.
- Habilite o SBAS, se disponível – as correções podem reduzir significativamente a deriva.
- Verifique se há interferência magnética afetando a bússola – problemas na bússola frequentemente se disfarçam como problemas de GNSS.
- Considere fatores ambientais (árvores, edifícios) – reflexões de múltiplos caminhos podem causar erros de posição.
Em uma missão de mapeamento, notei o drone gradualmente se desviando do curso. O problema acabou sendo uma bússola mal calibrada sendo afetada pelos motores. Recalibrar a bússola longe de qualquer objeto de metal resolveu o problema.
Falhas de GNSS
Sintomas:
- Saltos repentinos de posição
- Comportamento errático de navegação
- Perda temporária de posição
Soluções:
- Ajuste os parâmetros de filtragem de GNSS – a maioria dos firmwares tem configurações para suavizar os dados de GNSS.
- Aumente a suavização da navegação – isso pode filtrar falhas momentâneas.
- Verifique se há interferência elétrica intermitente – fontes de alimentação chaveadas são culpados comuns.
- Atualize para o firmware mais recente – muitos problemas de GNSS são resolvidos em atualizações de firmware.
- Considere uma atualização de hardware para uma geração mais nova – receptores mais novos têm melhor rejeição de sinais espúrios.
Descobri que adicionar um capacitor à entrada de energia do módulo GNSS pode ajudar a reduzir falhas causadas por ruído elétrico do sistema de energia.
Ferramentas de Diagnóstico
U-Center (Software de Configuração Ublox)
Esta é minha ferramenta preferida para diagnosticar problemas de GNSS:
• Propósito: Configurar e monitorar receptores GNSS Ublox
• Recursos:
- Rastreamento de satélite em tempo real
- Monitoramento da qualidade do sinal
- Ajuste de parâmetros de configuração
- Atualizações de firmware
- Análise de desempenho
Eu me conecto via USB ou passagem UART do controlador de voo. A visualização da intensidade do sinal de satélite é particularmente útil para identificar problemas de interferência – você verá todos os satélites com intensidade de sinal reduzida, em vez de apenas alguns específicos.
https://www.u-blox.com/en/product/u-center-pt/
Visualizadores de GNSS
Integrados na maioria dos softwares de controlador de voo:
• Propósito: Visualizar o desempenho do GNSS
• Exemplos:
- Status de GPS do Mission Planner
- Tela de Configuração de GPS do INAV
- Aba de GPS do Betaflight
Eu sempre verifico esses antes dos voos para garantir uma boa recepção. As métricas-chave que monitoro são:
- Contagem de satélites (quanto mais, melhor; gosto de ver 14+ para missões críticas)
- Valor de HDOP (quanto menor, melhor; miro em < 1,5)
- Tipo de fixação (3D é necessário para navegação, RTK float/fixed para aplicações de precisão)
- Intensidade do sinal (indica qualidade de recepção e potencial interferência)
Análise de Caixa-Preta
Para diagnóstico pós-voo:
• Propósito: Revisar o desempenho do GNSS durante o voo
• Ferramentas:
- Blackbox Explorer
- Flight Review (ArduPilot)
Identifiquei muitos problemas sutis através da análise de caixa-preta que não eram aparentes durante o voo. Dados-chave para examinar incluem:
- Precisão da posição ao longo do tempo
- Deriva do ponto de origem
- Desempenho de navegação
- Qualidade do sinal GNSS
Comparar dados de GNSS com outros sensores (como acelerômetros) pode revelar problemas de integração que afetam o desempenho da navegação.
Tendências Futuras na Tecnologia GNSS
Com base na minha experiência com os módulos mais recentes e desenvolvimentos da indústria, aqui está para onde vejo a tecnologia GNSS se encaminhando:
Avanços de Hardware
• Padrão Multi-Banda: Frequência dupla está se tornando mais comum em dispositivos de consumo. Espero que isso chegue aos drones de hobby dentro de 2-3 anos, trazendo melhor precisão e confiabilidade.
• Miniaturização: Módulos menores e mais leves com melhor desempenho. A tendência de integração continuará, com GNSS, bússola, barômetro e até IMU em pacotes únicos.
• Integração: GNSS combinado, bússola, barômetro e rádio. Já estou vendo isso em alguns módulos de ponta, e isso simplifica a fiação e reduz o peso.
• Eficiência Energética: Vida útil estendida da bateria para missões de longo alcance. O modo Super-E do M10 é apenas o começo – futuros módulos provavelmente reduzirão ainda mais o consumo de energia.
• Tecnologia de Antena: Recepção aprimorada em pacotes menores. O design de antenas continua avançando, com melhor desempenho em fatores de forma menores.
Inovações de Software
• Algoritmos Aprimorados: Melhor estimativa de posição e filtragem. Abordagens de aprendizado de máquina estão começando a aparecer em sistemas comerciais e eventualmente chegarão aos drones de hobby.
• Posicionamento Aprimorado por IA: Aprendizado de máquina para ambientes desafiadores. Vi pesquisas iniciais usando redes neurais para melhorar o posicionamento em cânions urbanos.
• Fusão de Sensores: Integração mais estreita com outros sensores de navegação. As linhas entre GNSS, posicionamento visual e navegação inercial continuarão a se confundir.
• Monitoramento de Integridade: Melhor detecção de sinais não confiáveis. À medida que os drones se tornam mais autônomos, saber quando não confiar nos dados GNSS se torna cada vez mais importante.
• Configuração Simplificada: Configuração mais intuitiva. A complexidade da configuração de GNSS tem sido uma barreira para muitos usuários, mas os sistemas mais novos estão se tornando mais plug-and-play.
Tecnologias Emergentes
• Navegação por Satélite LEO: Constelações de órbita terrestre baixa para maior precisão. Sistemas como o Starlink podem potencialmente oferecer serviços de navegação com melhor desempenho urbano do que o GNSS tradicional.
• Navegação Assistida por Visão: Câmeras aprimorando o GNSS em ambientes desafiadores. Já estou usando isso em algumas construções, onde sensores de fluxo óptico complementam o GNSS para um posicionamento mais robusto.
• Sensores Quânticos: Tecnologia de posicionamento de próxima geração. Ainda em laboratórios de pesquisa, mas os sensores quânticos prometem melhorias dramáticas na precisão sem referências externas.
• Autenticação Avançada: Proteção contra ataques de spoofing. À medida que o spoofing de GNSS se torna mais comum, os recursos de autenticação se tornarão mais importantes para aplicações críticas.
• Posicionamento em Malha: Drones compartilhando dados de posição em enxames. Experimentei isso em configurações de vários drones, onde os drones podem usar o posicionamento relativo para aprimorar suas estimativas de posição absoluta.
FAQ: Perguntas Comuns Sobre Tecnologia GNSS de Drones
Qual é a diferença entre GPS, GNSS e GLONASS?
Esta é uma das perguntas mais comuns que recebo ao ajudar as pessoas com suas construções:
• GPS (Sistema de Posicionamento Global): O sistema de navegação por satélite americano operado pela Força Espacial dos EUA. É o sistema original e mais amplamente utilizado.
• GNSS (Sistema Global de Navegação por Satélite): O termo geral para todos os sistemas de navegação por satélite, incluindo GPS, GLONASS, Galileo, BeiDou e sistemas regionais. Os receptores modernos normalmente usam várias constelações GNSS simultaneamente.
• GLONASS: O sistema de navegação por satélite da Rússia, semelhante ao GPS, mas com diferentes características orbitais e estrutura de sinal. É o segundo sistema global mais antigo e fornece boa cobertura em altas latitudes.
Quando alguém se refere a um "módulo GPS" para um drone, normalmente está falando de um receptor GNSS que pode usar várias constelações de satélites, não apenas o sistema GPS americano. Sempre esclareço isso ao ajudar os novatos para evitar confusão.
Vale a pena atualizar para um módulo GNSS de nova geração?
Com base na minha experiência atualizando inúmeros drones:
• M6/M7 para M8: Melhoria significativa no tempo de aquisição, suporte de constelação e precisão. Definitivamente vale a pena atualizar.
• M8 para M9: Melhorias perceptíveis na precisão, taxa de atualização e desempenho de várias constelações. Vale a pena atualizar para uso sério de navegação.
• M9 para M10: Melhorias incrementais na sensibilidade, consumo de energia e desempenho urbano. Vale a pena considerar para aplicações especializadas ou se a eficiência energética for crítica.
Para a maioria dos pilotos amadores, um módulo M8N ainda é adequado para navegação básica, enquanto um M9N fornece excelente desempenho para aplicações mais exigentes. A série M10 ou F9P são principalmente benéficas para usos profissionais ou especializados.
Atualizei meu drone de exploração de longo alcance de M8N para M9N e notei melhorias imediatas no tempo de aquisição e estabilidade da posição. Para meus quads freestyle que usam GPS apenas para retornar ao ponto inicial, mantive os módulos M8N, pois são perfeitamente adequados para essa finalidade.
Quantos satélites eu preciso para uma navegação confiável?
A partir da minha experiência com dezenas de drones equipados com GNSS:
• Mínimo funcional: 5-6 satélites
• Mínimo recomendado: 8 satélites
• Bom desempenho: 10-14 satélites
• Excelente desempenho: 15+ satélites
No entanto, a contagem de satélites é apenas parte da equação. O HDOP (Diluição Horizontal da Precisão) é igualmente importante - um valor HDOP mais baixo (idealmente abaixo de 2,0) indica uma melhor geometria de satélite e um posicionamento mais preciso.
Já tive situações com mais de 20 satélites, mas HDOP ruim devido a todos os satélites estarem agrupados em uma parte do céu, resultando em posicionamento medíocre. Por outro lado, tive um excelente desempenho com apenas 9 satélites bem distribuídos pelo céu, proporcionando um HDOP baixo.
Os receptores modernos de várias constelações geralmente podem ver mais de 20 satélites em condições de céu aberto, proporcionando excelente redundância e precisão.
O uso de várias constelações drena a bateria mais rapidamente?
Uma pergunta que frequentemente recebo de pilotos preocupados com o tempo de voo:
O uso de várias constelações GNSS aumenta ligeiramente o consumo de energia, mas o impacto é relativamente pequeno:
• Apenas GPS: Consumo de energia de base
• GPS+GLONASS: ~10-15% mais energia do que apenas GPS
• GPS+GLONASS+Galileo+BeiDou: ~20-30% mais energia do que apenas GPS
Para contextualizar, um módulo M8N típico consome cerca de 25mA, enquanto uma configuração completa de várias constelações pode consumir 30-35mA. Em um drone com um consumo de corrente de 5-20A durante o voo, essa diferença é insignificante (menos de 0,5% do consumo total de energia).
Eu medi a diferença em minhas construções de longo alcance, e o impacto no tempo de voo é imperceptível. Os benefícios de melhor precisão, aquisição mais rápida e melhor confiabilidade quase sempre superam o impacto mínimo de energia.
Qual constelação GNSS é a mais precisa?
Com base nos meus testes em diferentes regiões:
• GPS: Geralmente precisão de 3-5m, muito consistente e confiável
• GLONASS: Normalmente precisão de 4-7m, melhor em altas latitudes
• Galileo: Precisão de 1-3m, projetado para precisão civil
• BeiDou: 3-5m globalmente, 2-3m na região Ásia-Pacífico
No entanto, o melhor desempenho vem do uso de várias constelações juntas, pois elas complementam os pontos fortes e fracos umas das outras. Um receptor moderno usando todas as constelações disponíveis normalmente alcança uma precisão de 1-3m em boas condições, melhor do que qualquer constelação única.
Na minha experiência, o Galileo atualmente oferece a melhor precisão civil dos sistemas globais, mas sua vantagem é mais perceptível quando combinado com outras constelações.
Posso usar RTK em um drone comum?
Sim, o RTK pode ser implementado em drones comuns com algumas considerações:
Requisitos:
- Módulo GNSS com capacidade RTK (como ZED-F9P)
- Controlador de voo com suporte RTK (ArduPilot, INAV com limitações)
- Estação base ou serviço NTRIP para correções
- Link de dados para transmissão de correção (rádio telemetria, 4G/LTE)
Considerações Práticas:
- Custo adicional ($150-300 para hardware RTK)
- Maior complexidade na configuração
- Necessidade de fonte de dados de correção
- Benefício limitado para voo FPV padrão
Implementei RTK em várias construções e, embora a precisão em nível de centímetros seja impressionante, geralmente é desnecessária para voos recreativos, corridas ou freestyle. Onde o RTK faz sentido é para mapeamento, levantamento, agricultura de precisão e aplicações de pouso automatizado.
Para meu drone de pesquisa, uso um módulo ZED-F9P com uma conexão 4G para receber correções NTRIP de um serviço público. A configuração foi mais complexa do que uma implementação GNSS padrão, mas os resultados valem a pena para aplicações profissionais.
Como os fatores ambientais afetam o desempenho do GNSS?
Vários fatores ambientais podem impactar significativamente a recepção GNSS:
• Cânions Urbanos: Edifícios bloqueiam e refletem sinais, reduzindo a precisão em 5-10x. Já vi erros de posição de mais de 20 metros em ambientes urbanos densos com receptores de constelação única.
• Folhagem Densa: As árvores podem atenuar os sinais em 10-30dB, reduzindo a visibilidade do satélite. Descobri que voar acima do dossel das árvores é frequentemente necessário para uma navegação confiável em áreas florestadas.
• Corpos d'água: Reflexões podem causar erros de múltiplos caminhos. Ao mapear linhas costeiras, notei saltos de posição perto da borda da água devido a reflexões de sinal.
• Clima: Chuva forte pode degradar ligeiramente os sinais (atenuação de 1-2dB). Na minha experiência, isso raramente causa problemas perceptíveis de desempenho.
• Condições Ionosféricas: A atividade solar pode afetar a precisão. Durante tempestades solares, observei um desempenho ligeiramente degradado, embora os receptores modernos lidem bem com isso.
• Fontes de Interferência: Interferência de RF próxima pode bloquear a recepção. Uma vez, tive um drone que se recusou a obter um bloqueio de posição até que percebi que meu sistema de microfone sem fio estava causando interferência.
Receptores de várias constelações ajudam a mitigar esses problemas, fornecendo mais satélites e frequências para trabalhar, mas nenhum sistema GNSS é completamente imune a desafios ambientais. Para aplicações críticas em ambientes desafiadores, sempre considero tecnologias de navegação complementares, como fluxo óptico ou posicionamento visual.
Conclusão
A tecnologia GNSS evoluiu drasticamente de suas origens militares para se tornar um componente essencial dos sistemas de drones modernos. A transição de receptores GPS de constelação única para receptores GNSS de várias constelações melhorou significativamente o desempenho, a confiabilidade e os recursos de navegação.
Compreender as diferenças entre GPS, GLONASS, Galileo e BeiDou—assim como a evolução da tecnologia de receptores, desde os primeiros módulos até as gerações mais recentes M10 e F9P—permite que os pilotos de drones tomem decisões informadas sobre seus sistemas de navegação. Seja você voando por recreação, corrida, estilo livre ou aplicações profissionais, selecionar a tecnologia GNSS apropriada e implementá-la corretamente pode aprimorar os recursos e a segurança do seu drone.
À medida que a tecnologia GNSS continua avançando com recepção multibanda, algoritmos aprimorados e integração com outros sensores, podemos esperar um desempenho ainda melhor em ambientes desafiadores e um posicionamento mais preciso para aplicações especializadas. Mantendo-se informado sobre esses desenvolvimentos e entendendo como otimizar sua configuração atual, você pode garantir que seu sistema de navegação de drone tenha o melhor desempenho.


