GNSS技術:安全なナビゲーションのための包括的ガイド
「GPS」は、ドローンの衛星ナビゲーションの総称としてよく使われていますが、最新のナビゲーションシステムは、実際には複数の衛星群を利用しており、総称して GNSS (Global Navigation Satellite Systems) と呼ばれています。私は長年にわたってさまざまなナビゲーションシステムを搭載したドローンを製作・飛行させてきましたが、GNSS を適切に実装することが、確実に帰還できるドローンと、高価な木の装飾品になってしまうドローンの違いになることを実感してきました。この包括的なガイドでは、さまざまな衛星航法システムとその特徴、GNSS 受信機モジュールの進化、そしてこれらの技術がドローンのナビゲーション能力をどのように向上させるかを探ります。
GNSS 技術の紹介
GNSS (Global Navigation Satellite System) とは、宇宙から信号を提供する衛星群のことで、測位と時刻のデータを GNSS 受信機に送信します。これらの受信機は、このデータを使用して位置を特定します。GPS が最もよく知られている GNSS ですが、他にもいくつかのシステムが存在し、最新の受信機ではパフォーマンス向上のために複数のシステムを同時に使用することがよくあります。

2020年に初めて GPS を搭載したドローンを手にしたことを今でも覚えています。原始的な Ublox LEA-6H モジュールを使用していて、位置ロックに約 2 分かかり、ホバリング中に数メートルもドリフトしていました。それが今日では、数秒でロックし、驚くべき精度で位置を維持するマルチコンステレーション受信機で飛行しています。ドローンの能力にとって、その進化は革命的としか言いようがありません。
衛星航法の進化
衛星航法は、その始まりから劇的に進化してきました。
• 軍事的起源 (1970年代-1980年代): 米国国防総省が軍事用途のために GPS を開発。技術は厳重に管理され、民間での利用は制限されていました。
• 民間利用 (1990年代): 選択可用性政策により、民間利用のために GPS の精度が意図的に低く抑えられていました。初期の GPS ユニットは 100m 以上の誤差がありました!
• 完全な民間利用 (2000年代): 選択可用性の解除により、民間での高精度な利用が可能になりました。これは、信頼性の高いドローンナビゲーションへの扉を開く画期的な出来事でした。
• マルチコンステレーション時代 (2010年代): GLONASS、Galileo、BeiDou などの代替システムの開発と展開により、冗長性が生まれ、性能が向上しました。2022年頃、GPS のみのモジュールから GPS+GLONASS モジュールにアップグレードしたところ、ドローンのナビゲーション信頼性が大幅に向上したことに気づきました。
• 現代の統合 (現在): マルチコンステレーション受信機は、民生用機器の標準となっています。今日では、低価格のドローンでも、センチメートル単位の測位のために 30 以上の衛星に同時にアクセスできます。
衛星航法の基本原理
すべての GNSS システムは同様の原理で動作しますが、この基本を理解することで、長年にわたって数え切れないほどのナビゲーションの問題をトラブルシューティングすることができました。
- 衛星コンステレーション: 地球を周回する衛星のネットワークが、正確な時刻と位置の信号を放送します。受信機が「見る」ことができる衛星の数が多いほど、位置の精度が高くなります。
- 信号送信: これらの衛星は、特定の無線周波数で正確な時刻と位置情報を放送します。信号は地球に到達する頃には信じられないほど弱くなっています。12,000マイル離れたところから見た50ワットの電球とほぼ同じ電力です!
- 三辺測量: ドローンの受信機は、複数の衛星からの時間遅れを測定することで位置を計算します。私はこれを、受信機が「衛星 A からどれだけ離れているか?衛星 B からはどれだけ?」などと尋ね、それらの距離をすべて満たす唯一の位置を決定するものだと説明するのが好きです。
- 最小要件: 3次元測位(緯度、経度、高度)には、少なくとも4つの衛星が必要です。経験上、4つの衛星でも動作しますが、信頼性の高いドローンナビゲーションには8つ以上が必要です。
- 誤差修正: 大気遅延、クロック誤差、その他の要因を考慮して精度を向上させるさまざまな手法があります。最新の受信機はこの点で非常に優れているため、今日のドローンは非常に正確に位置を保持できるのです。
主要なパフォーマンス指標
GNSS のパフォーマンスを決定する要因はいくつかあり、これらを理解することで、さまざまなアプリケーションに適したモジュールを選択することができました。
• 精度: 測定された位置が真の位置にどれだけ近いか。標準的なドローンナビゲーションでは、通常2~3メートルの精度で十分ですが、マッピングや精密なアプリケーションでは、センチメートル単位の精度が必要になることがあります。
• 可用性: サービスが使用可能な時間の割合。マルチコンステレーション受信機は、特に都市部や部分的な樹冠下などの厳しい環境で、この指標を大幅に改善することがわかりました。
• 継続性: 中断することなく機能する能力。これは自律ミッションにとって重要です。長距離飛行中に一時的に GNSS が途切れると、大惨事になる可能性があります。
• 完全性: システムが正しい情報を提供していることへの信頼。最新の受信機には、誤った測定値を検出して拒否する高度なアルゴリズムが搭載されています。
• 初期捕捉時間 (TTFF): 位置を確立するまでの速さ。ローエンドの受信機で離陸前に GPS ロックに数分待たされていた時代を思い出します。今では最新のモジュールなら通常数秒です。
• 更新レート: 位置がどのくらいの頻度で更新されるか。レースやダイナミックな飛行では、高い更新レート(10Hz以上)がより滑らかなナビゲーションを提供します。
主要な GNSS コンステレーション
長年にわたり、これらのシステムのさまざまな組み合わせをサポートする受信機を使用してきましたが、それぞれに長所と短所があります。それらの違いを理解することで、さまざまな飛行条件に合わせてドローンを最適化することができました。
GPS (Global Positioning System)
オリジナルで最も広く使用されている衛星航法システムです。
• 国/地域: アメリカ合衆国
• 初期運用: 1978年(限定的)、1995年に完全運用能力
• 衛星: 運用中の衛星31機(グローバルカバレッジには24機が必要)
• 軌道特性:
- 約20,200kmの中軌道
- 6つの軌道面に4機以上の衛星
- 12時間の軌道周期
• 信号周波数:
- L1 (1575.42 MHz) - 民間の主要周波数
- L2 (1227.60 MHz) - 軍事用および民間の高度なアプリケーションに使用
- L5 (1176.45 MHz) - 安全性重視のアプリケーション用の最新周波数
• 精度:
- 標準測位サービス (SPS): 約3~5メートル
- 高精度測位サービス (PPS): 約1メートル未満(軍事用)
GPS は長年にわたってドローンナビゲーションの中核を担ってきましたが、私は今でも全体的に最も信頼性の高いシステムだと考えています。世界中の遠隔地で飛行してきましたが、GPS のカバレッジがほとんど期待を裏切ることはありませんでした。このシステムの成熟度と継続的な近代化プログラムにより、ほとんどのアプリケーションで信頼できる選択肢となっています。
GPSの制限の1つは、衛星軌道の構成により、高緯度(極付近)でのパフォーマンスが低下する可能性があることです。また、都市の谷間や濃い葉によっても信号が影響を受ける可能性があるため、複数の測位システムにアクセスできることが非常に重要です。
GLONASS(GLObal NAvigation Satellite System)
ロシアのGPSの代替システムは、現代の受信機において重要な補完システムとなっています:
• 国/地域: ロシア
• 初期運用: 1982年(限定的)、2011年に完全運用能力を回復
• 衛星: 24機の運用衛星
• 軌道特性:
- 約19,100kmの中軌道
- 3つの軌道面に各8機の衛星
- 11時間15分の軌道周期
• 信号周波数:
- L1 (1598.0625 - 1605.375 MHz)
- L2 (1242.9375 - 1248.625 MHz)
- L3 (1202.025 MHz)
• 精度:
- 標準精度: 約4-7メートル
- 高精度: 約1メートル未満(軍用)
私が初めてGLONASS機能をドローンに追加したのは2022年頃で、すぐに改善が見られました。このシステムは特に高緯度で優れたパフォーマンスを発揮します。ノルウェー北部で飛行したことがありますが、受信機の視界内でGLONASS衛星の数がGPSよりも多いことがよくありました。
GLONASSは、複合受信機においてGPSを非常によく補完します。歴史的にGPSほど安定していなかった(1990年代にはシステムがほぼ崩壊した時期があった)ものの、現代のGLONASSは非常に信頼性が高くなっています。両方のシステムを稼働させることで、優れた冗長性が得られることがわかりました。一方のシステムに問題があっても、もう一方のシステムがドローンを安全に航行させてくれます。
Galileo
欧州連合の民間管理のGNSSは最新の主要プレーヤーであり、そのパフォーマンスに感銘を受けています:
• 国/地域: 欧州連合
• 初期運用: 2016年(初期サービス)、2026年までに完全運用能力を予定
• 衛星: 28機を予定(24機の運用衛星 + 4機の予備機)、現在26機が軌道上にある
• 軌道特性:
- 約23,222kmの中軌道
- 3つの軌道面に各8-10機の衛星
- 14時間の軌道周期
• 信号周波数:
- E1 (1575.42 MHz) - GPS L1と同じ
- E5a (1176.45 MHz) - GPS L5と同じ
- E5b (1207.14 MHz)
- E6 (1278.75 MHz)
• 精度:
- オープンサービス: 約1-3メートル
- 高精度サービス: 約20cm
- 公共規制サービス: 政府用に暗号化
2022年頃にドローンでGalileoを初めて有効にしたとき、目に見える違いがあるかどうか懐疑的でした。驚いたことに、特に建物が一部の衛星信号をブロックする可能性がある都市環境で、違いがありました。それらの追加のGalileo衛星が視界に入ることで、より一貫したナビゲーションパフォーマンスが得られました。
Galileoは民間アプリケーション用に特別に設計されており、標準GPSよりも高い精度を実現しています。高度な完全性監視機能を評価しており、信頼性の低い信号の検出と軽減に役立ちます。このシステムはGPSと完全に相互運用可能であるため、最新の受信機でシームレスに統合できます。
Galileoはまだ完全な運用能力に達していませんが、すでに優れたサービスを提供しています。私が遭遇した唯一の制限は、一部の古い受信機がそれをサポートしていないことですが、最新のGNSSモジュールはこれらの衛星を最大限に活用します。
BeiDou(BDS)
中国の衛星航法システムは急速に進化し、グローバルプレーヤーになりました:
• 国/地域: 中国
• 初期運用: BeiDou-1(2000年)、BeiDou-2(2012年)、BeiDou-3(2020年)
• 衛星: 35機の運用衛星
• 軌道特性:
- 中軌道(21,500kmの27機の衛星)の混合
- 静止軌道(5機の衛星)
- 傾斜静止軌道(3機の衛星)
• 信号周波数:
- B1I (1561.098 MHz)
- B1C (1575.42 MHz) - GPS L1と同じ
- B2a (1176.45 MHz) - GPS L5と同じ
- B2b (1207.14 MHz) - Galileo E5bと同じ
- B3I (1268.52 MHz)
• 精度:
- グローバルサービス: 約3-5メートル
- リージョナルサービス: 約2-3メートル
私は2022年頃からBeiDou対応の受信機を使用し始めましたが、このシステムはGNSSエコシステムに貴重な追加となっていることが証明されています。BeiDouのユニークな点は、異なる軌道タイプの衛星を組み合わせた混合コンステレーション設計です。これにより、アジア太平洋地域でのカバレッジが強化され、特に優れたパフォーマンスが実現しています。
他のシステムにはないBeiDouの興味深い機能の1つは、メッセージ機能です。このシステムは実際に短いテキストメッセージを送信できますが、これはドローンアプリケーションでは通常使用されません。完全なグローバルサービスは2020年に完了し、BeiDouは最新の完全なグローバルナビゲーションシステムになりました。
私の経験では、BeiDouの統合は最新の受信機ではシームレスに行われていますが、初期の段階では英語のドキュメントが限られていました。今日では、マルチコンステレーション受信機の標準的な部分となっており、全体的なナビゲーションパフォーマンスに大きく貢献しています。
リージョナルシステム
グローバルシステムに加えて、特定の地域で追加の利点を提供できるいくつかのリージョナルGNSSシステムが存在します:
QZSS(準天頂衛星システム)
• 国/地域: 日本
• カバレッジ: 日本とアジア・オセアニア地域
• 衛星: 4機の運用衛星
QZSSは、日本上空で高仰角を維持する軌道の衛星を使用して、日本の都市の谷間で機能するように設計されています。東京でQZSS対応の受信機を使用して飛行している人を見たことがありますが、都市部のパフォーマンスの改善は顕著でした。グローバルコンステレーションだけでは、高層ビルの間での位置保持がより安定していました。
NavIC(インド測位航法衛星システム)
• 国/地域: インド
• カバレッジ: インドと周辺地域(1,500km)
• 衛星: 7機の運用衛星
NavICはインド亜大陸用に最適化されています。私自身は広範にテストしたことはありませんが、インドで飛行する同僚は、受信機がグローバルコンステレーションに加えてこのリージョナルシステムをサポートしている場合、良好な結果が得られると報告しています。
ドローンにとってのマルチコンステレーションの利点
複数のGNSSコンステレーションを同時に使用することで、ドローンの運用にいくつかの利点があります。私は、ナビゲーションシステムをアップグレードしてきた中で、これらの利点を直接経験してきました。
衛星の可用性の向上
マルチコンステレーション受信機の最も直接的な利点は、単に視界内の衛星数が増えることです:
• より多くの可視衛星: 複合コンステレーションにより、開けた空の状態で30機以上の可視衛星が提供されます。GPSだけでは8-10機程度ですが、私は通常20-25機の衛星を見ています。
• 都市の谷間でのパフォーマンス: 都市や障害物のある地域でのより良い測位。GPSのみの受信機ではロックが外れるような建物の間を飛行したことがありますが、マルチコンステレーションシステムは安定したナビゲーションを維持しました。
• 幾何学的精度劣化(GDOP)の低減: より多くの衛星は、より良い幾何学とより正確な測位を意味します。これは、より正確なホバリングとナビゲーションにつながります。
• 実用的な影響: 特に厳しい環境下での飛行中に、GPSのドロップアウトが減りました。これにより、ドローンの潜在的な暴走や墜落から何機か救うことができました。
精度の向上
複数の測位システムが連携することで、全体的な測位精度が向上します:
• 誤差の平均化: 複数のシステムを使用することで、個々のシステムの誤差を平均化できます。GPSのみで±3メートルだった位置ホールド精度が、マルチコンステレーション受信機を使用することで1メートル以下に改善されました。
• クロスバリデーション: 異なるシステムからの位置情報を相互に検証し、外れ値を除外できます。これにより、シングルコンステレーション受信機で時折見られた位置の「ジャンプ」がなくなりました。
• 精度の向上: より多くの衛星を使用した位置計算は、一般的により精確になります。これは特に、GNSS測位で最も弱い次元である高度ホールドにおいて顕著です。
• 実用的な影響: ドローンの位置ホールドとナビゲーションがより安定し、自律ミッションの信頼性が向上し、映像がスムーズになりました。
システムの冗長性
重要なドローン運用において最も重要なメリットは、おそらく冗長性です:
• 障害からの保護: あるシステムに問題が発生しても、他のシステムがそれを補完できます。かつてGPS妨害の発生エリア(意図的ではないと思われる)を飛行したことがありますが、GLONASSとGalileoを使ってドローンは正常にナビゲーションを続けました。
• 妨害への耐性: 周波数が異なるため、完全な妨害が困難になります。これは、信号の完全性が重要なプロフェッショナルな運用において特に重要です。
• なりすまし検知: システム間の不一致は、なりすましの試みを示唆する可能性があります。GPSのなりすましは稀ですが、機密性の高いドローン運用において懸念が高まっています。
• 実用的な影響: マルチコンステレーション受信機を使用することで、リターントゥホームと自律機能の信頼性が大幅に向上しました。これにより、長距離飛行中の安心感が得られます。
より高速な捕捉
効率的なフィールド運用のためには、素早く位置を特定することが重要です:
• 並列処理: 受信機は複数のシステムから同時に信号を取得できます。これにより、離陸前の待ち時間が大幅に短縮されます。
• TTFFの短縮: 起動時の位置特定がより高速になります。以前は数分かかっていたものが、数秒で完了するようになりました。
• コールドスタートの改善: 受信機が最近の衛星データを持っていないコールドスタート時に特に有効です。マルチコンステレーション受信機を使用することで、コールドスタートの時間が60秒以上から30秒未満に短縮されました。
• 実用的な影響: 離陸前のGPSロックがより迅速になることで、待ち時間が減り、飛行時間が増えます。これは、時間が金であるプロフェッショナルな現場において特に価値があります。
ドローン用GNSS受信機の進化
私はこれまで、ほぼすべての世代のGNSS受信機をドローンで使用してきましたが、その進化は目覚ましいものでした。各世代で、性能、サイズ、機能が大幅に改善されています。
受信機の世代
初期のドローンGPS (2010-2014)
私が最初にGPSを搭載したドローンでは、Ublox LEA-6やNEO-6などのモジュールを使用していました。当時は画期的でしたが、今日の基準では原始的なものです:
• 特徴:
- GPSのみの受信
- 遅いアップデートレート (1-5Hz)
- 低感度
- 大型サイズ
- 高い消費電力
• 性能:
- 精度: 5-10メートル
- TTFF: コールドスタートで45-60秒
- 衛星受信能力: 12-16チャンネル
飛行の前にGPSロックを待つのにいらいらしたのを覚えています。開けた場所で数分間立ち尽くすことがよくありました。位置ホールドは良くて概算程度で、ドローンが各方向に数メートルずつドリフトしていました。リターントゥホームは神経をすり減らす体験でした。ドローンがどこを「ホーム」と判断するか全くわからなかったのです!
中期のGNSS (2015-2018)
ある時点で、Ublox NEO-7やNEO-M8Nなどのモジュールにアップグレードしましたが、これにより大幅な改善がもたらされました:
• 特徴:
- GPS + GLONASS受信
- 中程度のアップデートレート (5-10Hz)
- 感度の向上
- 小型化
- 消費電力の削減
• 性能:
- 精度: 2-5メートル
- TTFF: コールドスタートで30-45秒
- 衛星受信能力: 32-72チャンネル
GLONASSの追加は、信頼性の面で画期的でした。以前は苦戦していたエリアでも、ドローンが位置ロックを維持できるようになったのがすぐにわかりました。M8Nはこの時期のドローンナビゲーションの主力となり、今でもこのモジュールを搭載したドローンが何機か現役で飛んでいます。
現代のGNSS (2019-2022)
2022年、私は保有するドローンをUblox NEO-M9NやSAM-M8Qなどのモジュールにアップグレードし始めました:
• 特徴:
- マルチコンステレーション (GPS, GLONASS, Galileo, BeiDou)
- 高速アップデートレート (10-18Hz)
- 高感度
- コンパクト設計
- 省電力動作
• 性能:
- 精度: 1-3メートル
- TTFF: コールドスタートで15-30秒
- 衛星受信能力: 72-184チャンネル
性能の向上は著しいものでした。位置ホールドは非常に安定し、リターントゥホームの精度は離陸地点から1メートル以内に改善されました。4つの主要なコンステレーションを同時に使用できる能力は、厳しい環境下で優れた冗長性と性能を提供しました。
最新世代 (2023年-現在)
私の最新のビルドでは、Ublox NEO-M10やZED-F9P(RTKアプリケーション用)などの最先端モジュールを使用しています:
• 特徴:
- 完全なマルチコンステレーション、マルチ周波数
- 高速アップデートレート (最大25Hz)
- 非常に高い感度
- 超小型パッケージ
- 非常に低い消費電力
- ハイエンドモデルではRTK機能
• 性能:
- 精度: 0.5-2メートル (標準)、1-3cm (RTK)
- TTFF: コールドスタートで5-15秒
- 衛星受信能力: 184チャンネル以上
これらの最新モジュールは、性能面で飛躍的な進歩を遂げています。M10シリーズは優れた感度と電力効率を提供し、F9Pはコンシューマー向けドローンに測量級のRTK精度をもたらします。都市部や薄い森林の樹冠下などの厳しい環境での性能には特に感銘を受けました。
人気のドローンGNSSモジュールの詳細
長年にわたり、私はさまざまなビルドで最も一般的なGNSSモジュールのほとんどを使用してきました。それらの機能と理想的な用途について、私の評価を以下に示します:
Ublox NEO-M8N
長年にわたりドローンGNSSの主力として広く使用されており、今でも広く使用されています:
• コンステレーション: GPS, GLONASS, Galileo, BeiDou (最大3つを同時受信)
• チャンネル: 72トラッキングチャンネル
• アップデートレート: 最大10Hz (ドローンでは通常5Hz)
• 感度: -167dBmトラッキング
• 精度: 2.5m CEP (Circular Error Probable)
• 消費電力: 23mA @ 3.3V
M8Nモジュールを様々なドローンに数十個取り付けましたが、性能とコストのバランスが非常に優れています。このモジュールは最大3つのコンステレーションを同時に受信できますが、私は通常、性能と電力効率の最適な組み合わせであるGPS+GLONASSを使用しています。
私が発見した制限事項の1つは、すべてのコンステレーションを同時に有効にすると、チャンネルの制限により追跡の問題が発生する可能性があることです。ほとんどのアプリケーションでは、GPS+GLONASSまたはGPS+Galileoが最良の結果をもたらします。

M8Nは、一般的なナビゲーション、リターントゥホーム、ポジションホールドに適した選択肢です。一般的な実装には、BN-180、BN-220、および多くの統合FCモジュールが含まれます。
Ublox NEO-M9N
M8Nの後継アップグレード版で、大幅な改善が施されています:
• コンステレーション: GPS、GLONASS、Galileo、BeiDou (すべての同時受信)
• チャンネル: 184トラッキングチャンネル
• 更新レート: 最大25Hz (ドローンでは通常10Hz)
• 感度: -167dBmトラッキング
• 精度: 1.5m CEP (Circular Error Probable)
• 消費電力: 45mA @ 3.3V (捕捉時)、34mA (トラッキング時)
メインの長距離ドローンをM8NからM9Nにアップグレードしたとき、その違いは一目瞭然でした。M9Nは、チャンネルの制限なくすべてのコンステレーションを同時にトラッキングできるため、優れた冗長性とパフォーマンスを提供します。
高い更新レート (10Hz vs 5Hz) により、ナビゲーションがスムーズになり、位置調整の応答性が向上します。M9Nは、精密ナビゲーションとウェイポイントミッションに特に有用であり、精度の向上が顕著な違いをもたらすことがわかりました。

欠点の1つは消費電力が若干高いことですが、ドローン全体の電力使用量の観点からはまだ無視できるレベルです。一般的な実装には、Matek M9N-5883とHGLRC M9Nがあります。
Ublox NEO-M10S
最新世代の標準GNSSで、性能の限界に挑戦しています:
• コンステレーション: GPS、GLONASS、Galileo、BeiDou、QZSS、NavIC (すべての同時受信)
• チャンネル: 184以上のトラッキングチャンネル
• 更新レート: 最大25Hz
• 感度: -170dBmトラッキング
• 精度: 1.0m CEP (Circular Error Probable)
• 消費電力: 38mA @ 3.3V (フルパワー)、12mA (パワーセーブ)
最近、最新のビルドでM10シリーズのテストを開始しましたが、改善点は微妙ながら意味のあるものです。際立った特徴は、優れた電力効率です。Super-Eモードでは、性能を維持しながら消費電力を最大70%削減できます。
感度の向上 (-170dBm vs -167dBm) は、都市の峡谷や軽い木々の下などの厳しい環境でのパフォーマンス向上につながります。以前の世代では時折ロックを失っていたエリアで、より一貫した衛星追跡が可能になったことに気づきました。

M10は、電力効率が重要な長距離ミッションや、厳しい環境での飛行に最適です。ドローン市場ではまだ比較的新しいですが、入手可能性が向上するにつれ、新しい標準になると期待しています。
Ublox ZED-F9P
プロフェッショナルな用途向けの高精度RTK対応モジュール:
• コンステレーション: GPS、GLONASS、Galileo、BeiDou (すべての同時受信)
• チャンネル: 184トラッキングチャンネル
• 更新レート: 最大25Hz
• 感度: -167dBmトラッキング
• 精度: 標準1.0m CEP、RTKで1cm + 1ppm
• 消費電力: 68mA @ 3.3V
マッピングおよび測量ドローンでは、F9Pが変革をもたらしました。マルチバンド受信 (L1/L2/L5) とRTK機能により、センチメートルレベルの位置決めが可能になり、精密なアプリケーションに不可欠です。
RTKのセットアップには追加のコンポーネントが必要です。補正のための基地局またはNTRIPサービス、およびそれらの補正をドローンに送信するためのデータリンクです。私の測量ドローンでは4G/LTE接続を使用しており、公共サービスからNTRIP補正を受信できます。

F9Pは標準的なFPVドローンや写真撮影用ドローンには過剰ですが、マッピング、測量、精密農業、自動着陸アプリケーションには不可欠です。一般的な実装には、Here3やHolybro H-RTK F9Pなどがあります。
モジュール選択ガイド
適切なGNSSモジュールの選択は、特定のニーズによって異なります。さまざまな構成のビルドと飛行を何年も経験した私の実践的なアドバイスは次のとおりです:
基本的なナビゲーション用
• 推奨: NEO-M8Nまたは同等品
• 主な考慮事項:
- RTHとポジションホールドに適している
- 性能とコストのバランスが良い
- すべてのナビゲーションファームウェアで広くサポートされている
- 通常、コンパスが含まれる
M8Nモジュールは、コスト効率が高く、一般的なナビゲーションに適しているため、私の多くのビルドで今でも使用しています。時々のポジションホールドとリターントゥホームのニーズがある標準的なFPVドローンを構築する場合、M8Nは依然として適切な選択肢です。
高度なナビゲーション用
• 推奨: NEO-M9Nまたは同等品
• 主な考慮事項:
- ウェイポイントミッションに最適
- より高速な位置更新
- 困難な環境でのより高い信頼性
- 本格的なナビゲーションにはアップグレードの価値あり
自律ウェイポイントドローンと長距離ビルドでは、M9Nを標準採用しています。精度と更新レートの向上により、ナビゲーション性能に顕著な違いが見られ、すべての測位システムを同時に使用できることで、様々な環境での信頼性が向上します。
プロフェッショナル用途向け
• 推奨: NEO-M10またはZED-F9P
• 主な考慮点:
- 標準GNSS性能を最大限に引き出すにはM10
- センチメートル精度が必要な場合はF9P
- 電力と重量への影響を考慮
- 追加のセットアップと設定が必要な場合あり
測量・マッピング用ドローンにはF9Pを使用し、センチメートル精度の測位を実現しています。標準的なメートルレベルの精度で十分だが信頼性が最重要となる長距離探査では、M10が性能と電力効率の最良の組み合わせを提供します。
長距離・長時間飛行向け
• 推奨: 電力管理機能付きNEO-M10
• 主な考慮点:
- 電力効率が非常に重要に
- 信頼性が最重要
- アンテナの品質と設置位置を考慮
- バックアップナビゲーションシステムを推奨
最長距離のビルドでは、電力効率と信頼性が最優先事項です。M10のSuper-Eモードは、性能を維持しつつ優れた省電力を実現します。また、飛行距離が長くなるほど信号受信が重要になるため、アンテナの品質と設置位置にも特に注意を払っています。
GNSSモジュールの実装
GNSSモジュールの選択と同様に、その実装方法も重要です。最適な設置方法については、試行錯誤を通じて多くの教訓を得ました。
ハードウェア統合
アンテナに関する考慮事項
アンテナはGNSS性能に不可欠です。これは、アンテナ設置が最適でなかったいくつかのビルドを経験した後に痛感した教訓です:
• パッチアンテナ: ドローンモジュールで最も一般的
- 利点: コンパクト、上方指向性、良好な空の視界
- 欠点: 性能が機体の向きに左右される
- ベストプラクティス: 平らに取り付け、空がよく見える位置に

私のドローンの多くはパッチアンテナを使用しており、トッププレートに平らに取り付けて空がよく見える位置にすると良好に機能します。わずかな傾きでも性能が低下する可能性があるため、アンテナが完全に水平になるように注意しています。
• ヘリカルアンテナ: 一部の高性能モジュールに採用
- 利点: 低仰角での受信性能が向上、機体の向きの影響を受けにくい
- 欠点: 大型で高価
- ベストプラクティス: それでも適度な空の露出が必要

長距離ビルドでは、サイズが大きくなるにもかかわらず、ヘリカルアンテナを好んで使用しています。機体の向きの影響を受けにくく、ドローンが旋回中に傾いたときの受信性能が向上するため、アグレッシブな機動中も衛星の捕捉を維持するのに役立ちます。
• 外付けアンテナ: 一部のモジュールで選択可能
- 利点: 設置位置の柔軟性、性能向上の可能性
- 欠点: 重量増加、複雑さ、損傷の可能性
- ベストプラクティス: 高品質のケーブルを使用し、長さを最小限に
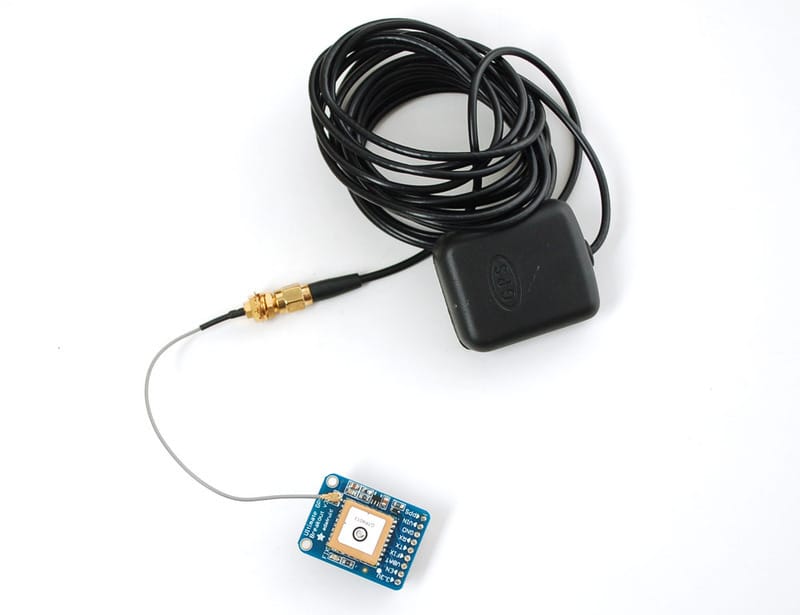
マッピング用ドローンでは、干渉源からアンテナを分離するために外付けアンテナを使用しています。重要なのは、高品質で短いケーブルを使用すること。安価なケーブルを使うと信号が大幅に劣化することを経験から学びました。
グラウンドプレーン
グラウンドプレーンはアンテナ性能に影響します。多くのビルダーが見落としがちな詳細です:
• 目的: 信号を反射し、受信感度を向上
• 実装: アンテナ下の金属板またはPCBエリア
• サイズ: 最適な性能のためには直径60〜80mm以上が理想的
• 代替案: 一部のモジュールにはグラウンドプレーンが内蔵

様々なグラウンドプレーン構成を試した結果、GNSSモジュールの下に直径約70mmの単純なアルミニウムディスクを置くだけで、受信感度を2〜3dB(30〜50%の感度向上に相当)改善できることがわかりました。内蔵グラウンドプレーンのないモジュールでは、この簡単な追加により、衛星の捕捉と保持に顕著な違いが見られます。
取り付け位置
GNSSモジュールの設置場所は非常に重要です:
• スタックマウント: フレーム内部
- 利点: 墜落からの保護
- 欠点: 電子機器からの干渉の可能性、空の視界が遮られる
- ベストプラクティス: 高感度モジュールのみ、カーボンファイバーによる遮蔽
GNSSモジュールをフレーム内部にスタックマウントしてみましたが、トッププレートによる信号遮断のため結果は芳しくありませんでした。この方法は、トップマウントが現実的でない非常に小型のビルドにのみ、しかも高感度モジュールを使用する場合にのみ推奨します。
• トッププレート: 最も一般的な位置
- 利点: 空がよく見え、地上の干渉から離れている
- 欠点: 衝突による損傷の可能性がある
- ベストプラクティス: 可能であればドローンの中央に配置する

私のドローンのほとんどは、GNSS モジュールをトッププレートに取り付けています。これにより、最高の空の視界が得られます。通常、飛行中のフレームの傾きの影響を最小限に抑えるため、バランスを取るために 3D プリントした延長トレイの後ろに配置します。
• マストマウント: フレームより高い位置に配置
- 利点: 優れた空の視界、干渉の低減
- 欠点: 衝突の脆弱性、重量の増加
- ベストプラクティス: 保護ケースと一緒に使用する

GNSS の性能が重要なマッピングドローンでは、アンテナをすべての潜在的な干渉源の上に上げるためにマストマウントを使用しています。重要なのは、クラッシュに耐えられる保護ケースや設計を使用することです。この教訓を学ぶために何本かアンテナを失いました!
干渉の軽減
GNSS 信号は非常に弱く、干渉を受けやすいことを、受信不良のトラブルシューティングを通じて身をもって知りました:
• 干渉源:
- 電力分配システム
- ビデオ送信機
- モーターと ESC のノイズ
- カーボンファイバーによるブロッキング
- その他の無線システム
• 軽減戦略:
- 電源ワイヤーと VTX から距離を保つ
- GNSS モジュール用にシールド付きケーブルを使用する
- 電源リードにフェライトコアを追加する
- RF シールド材の使用を検討する
- アンテナをカーボンファイバーから離す
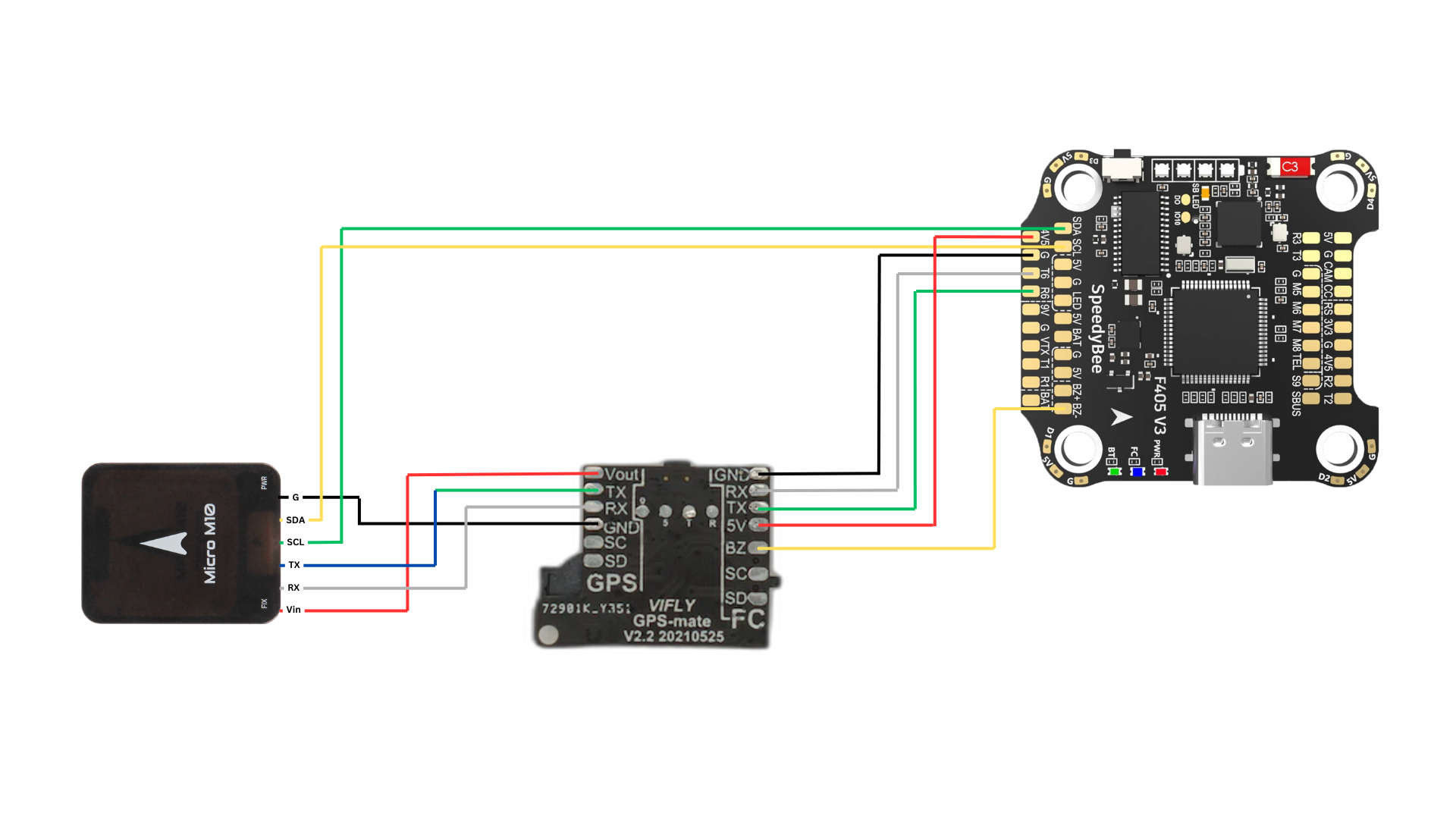
私が学んだ最大の教訓の 1 つは、GNSS アンテナをビデオ送信機から離しておくことの重要性です。ある構築では、VTX アンテナが GPS アンテナからわずか 3cm しか離れていないことに気づくまで、受信に問題が続きました。フレームの反対側に移動すると、問題はすぐに解決しました。
残念ながら、私のビルドのほとんどではスペースが問題になり、GPS モジュールを他のアンテナから完全に分離して配置することができない場合があります。そのような場合、GPS-mate のような製品は本当に命の恩人です。

カーボンファイバー製のトッププレートを使用したビルドでは、必ず非導電性のスタンドオフを使用して、GNSS モジュールをカーボンファイバーから少なくとも 10〜15mm 上に上げます。この簡単な変更により、カーボンファイバーが衛星信号をブロックするのを防ぐことで、受信感度を大幅に向上させることができます。
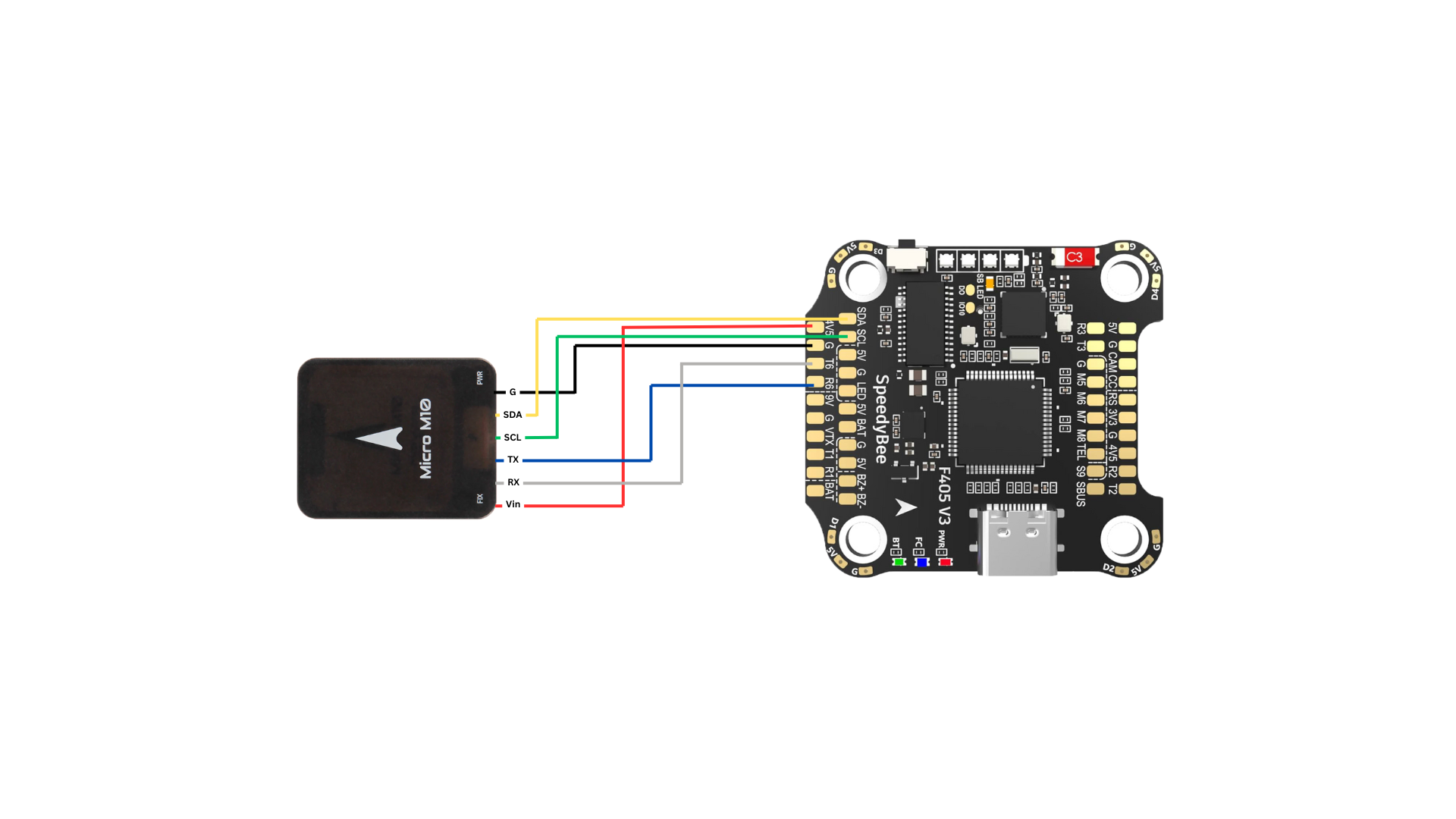
配線
ソフトウェア設定
ファームウェア設定
最新のフライトコントローラーファームウェアには、さまざまな GNSS 設定オプションが用意されています。さまざまなシステムで最適に機能することがわかったことは次のとおりです:
INAV GNSSの設定
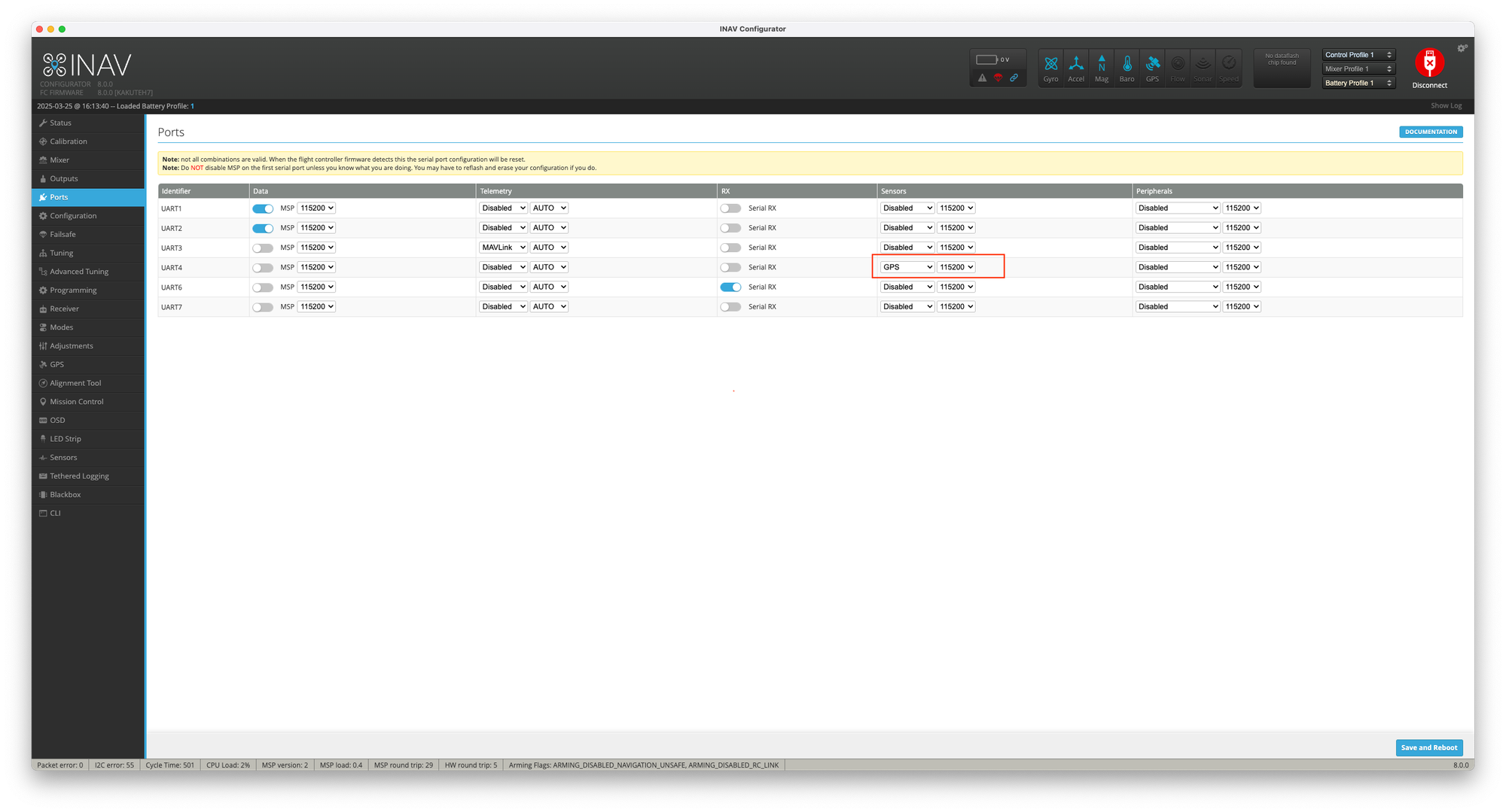
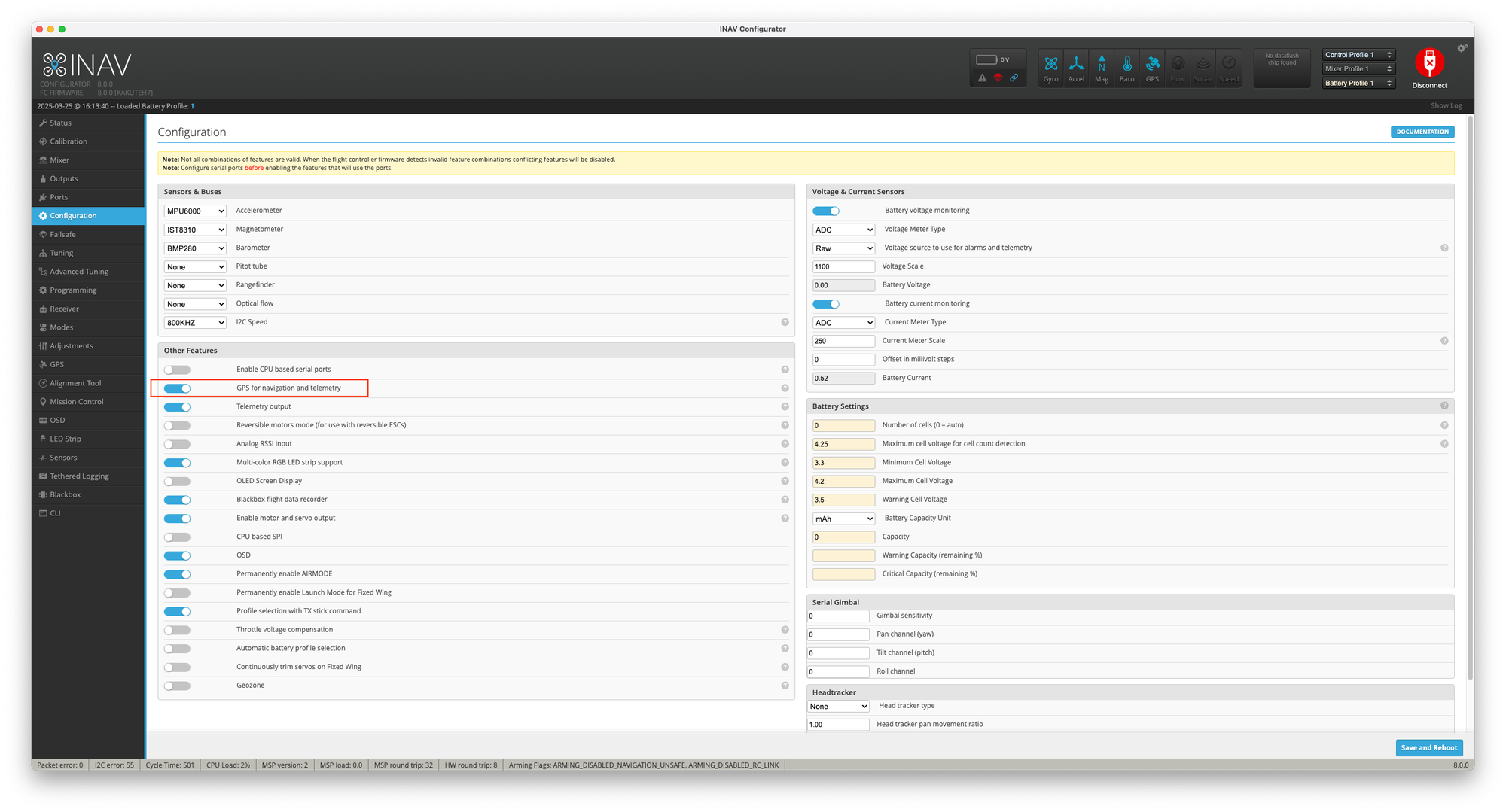
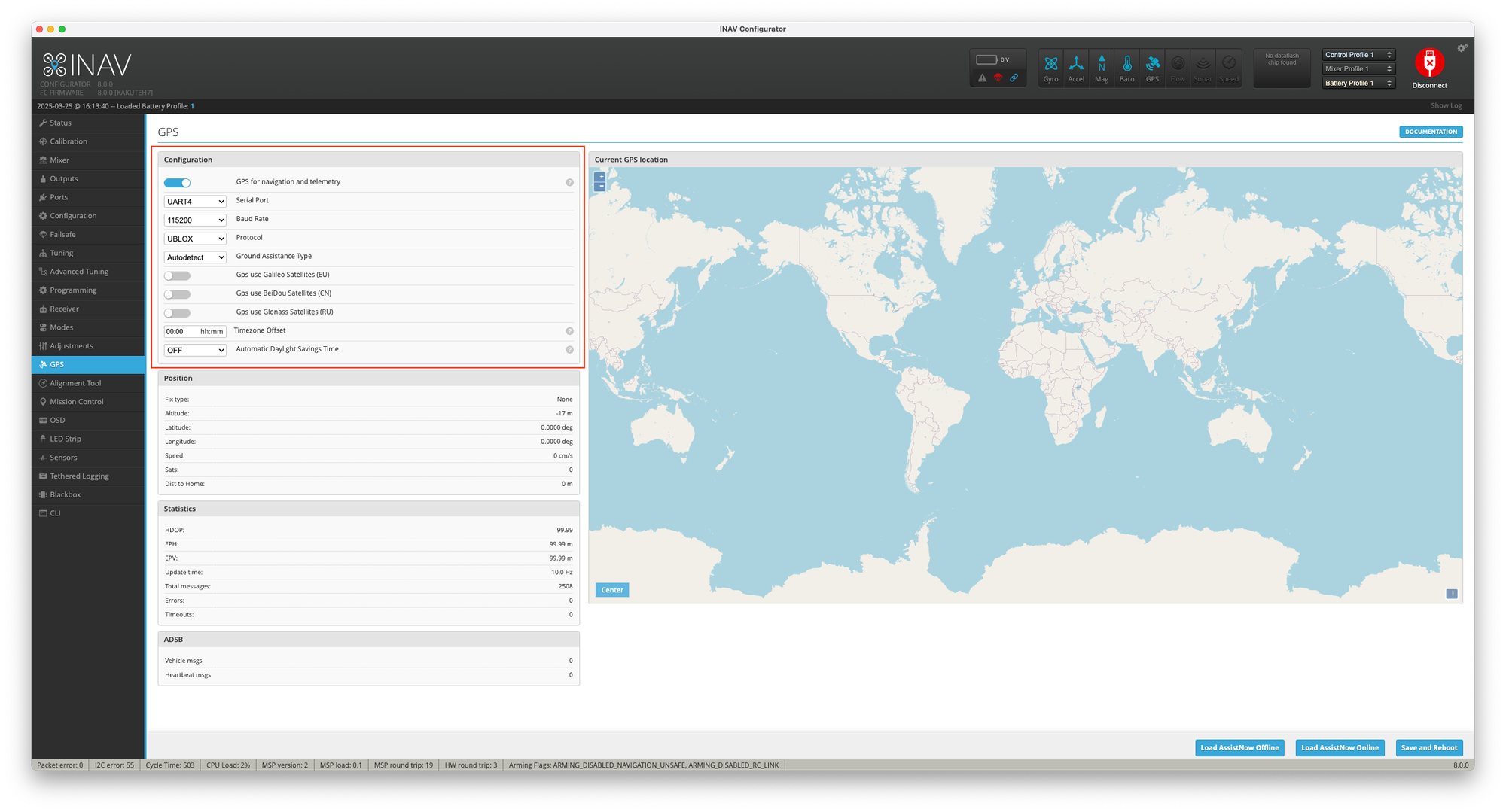
私の経験では、GNSSとバロメーターデータを組み合わせることで、最も安定した高度ホールドが得られます。磁気計(UBLOX+BARO+MAG)を追加すると、場合によっては位置推定が改善されますが、干渉を受けやすくなります。GPS測位精度の進化に伴い、磁気計から離れる傾向にあります。
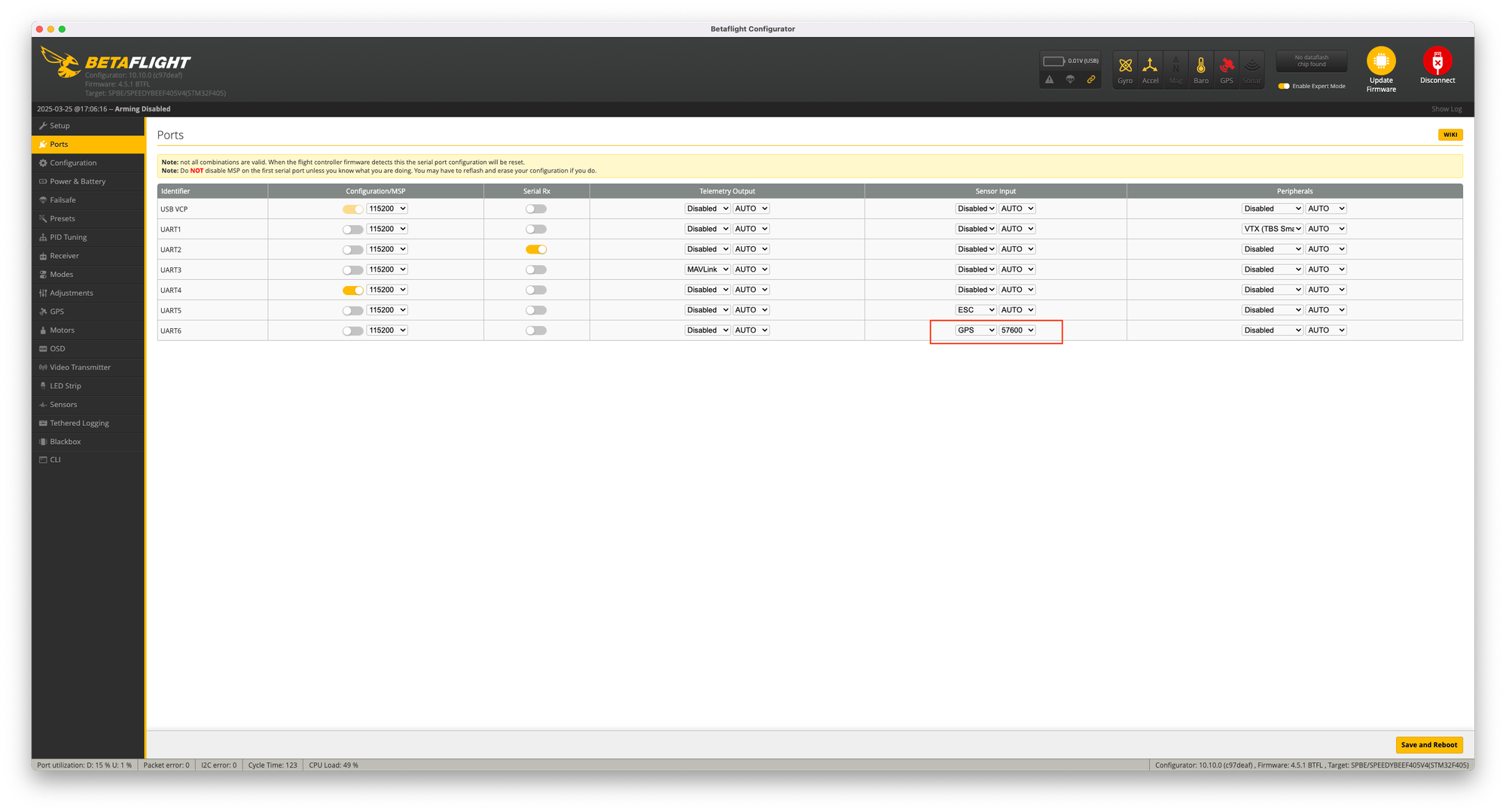
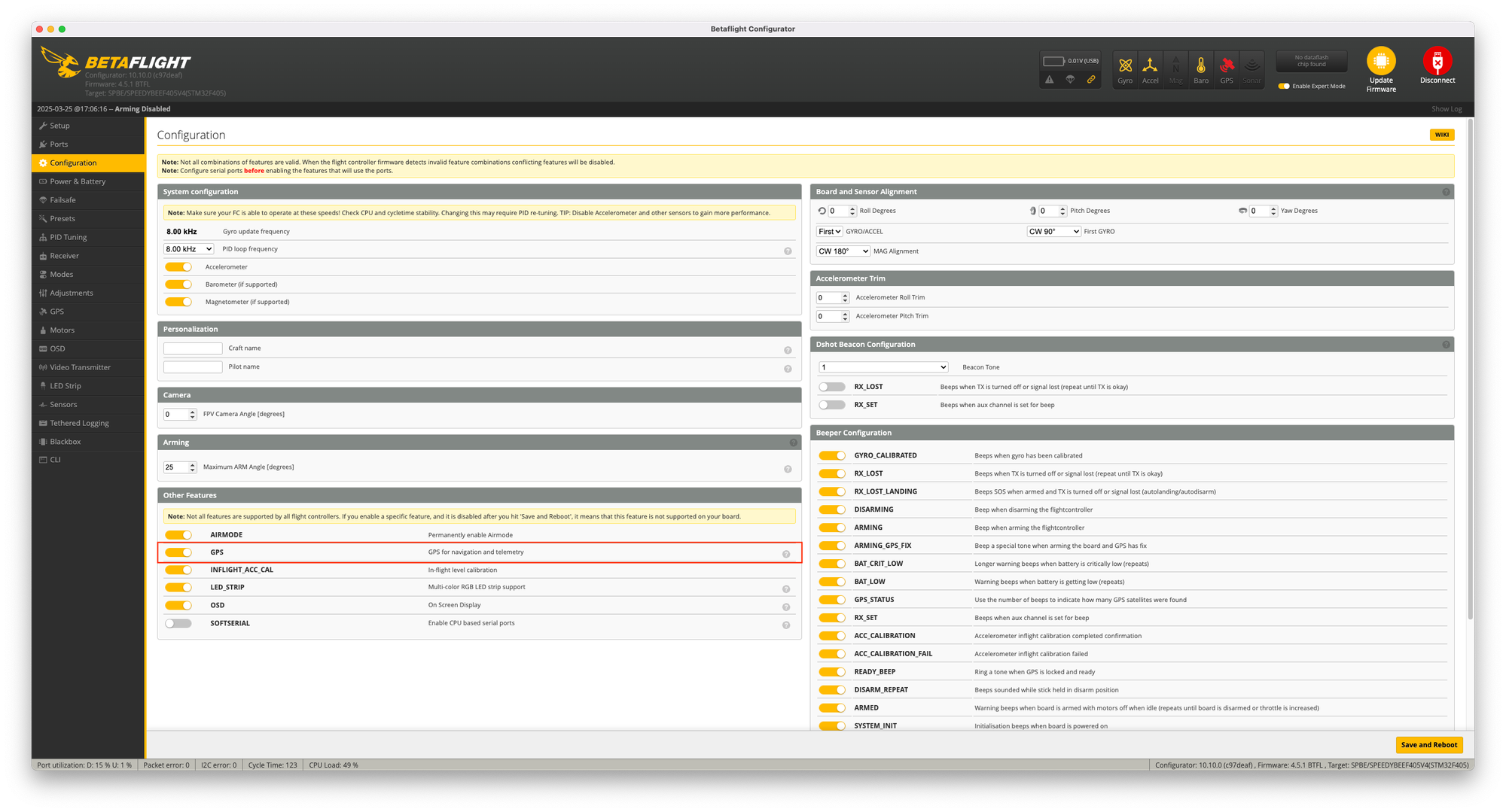
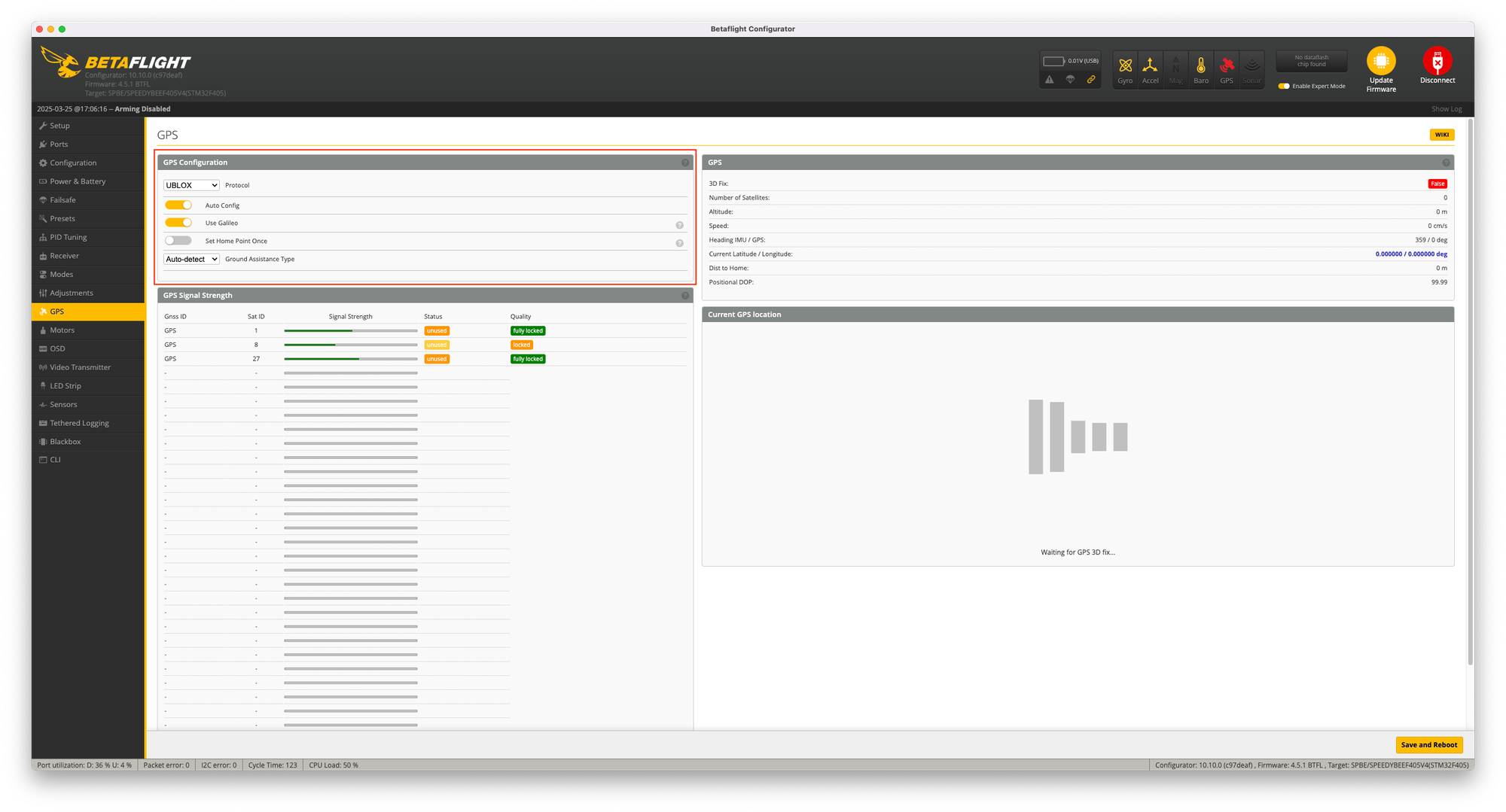
Betaflight GPSの設定
GPSレスキュー機能を備えたフリースタイルおよびレーシングビルドでは、次の設定をデフォルトとしています:
高度なGNSSトピック
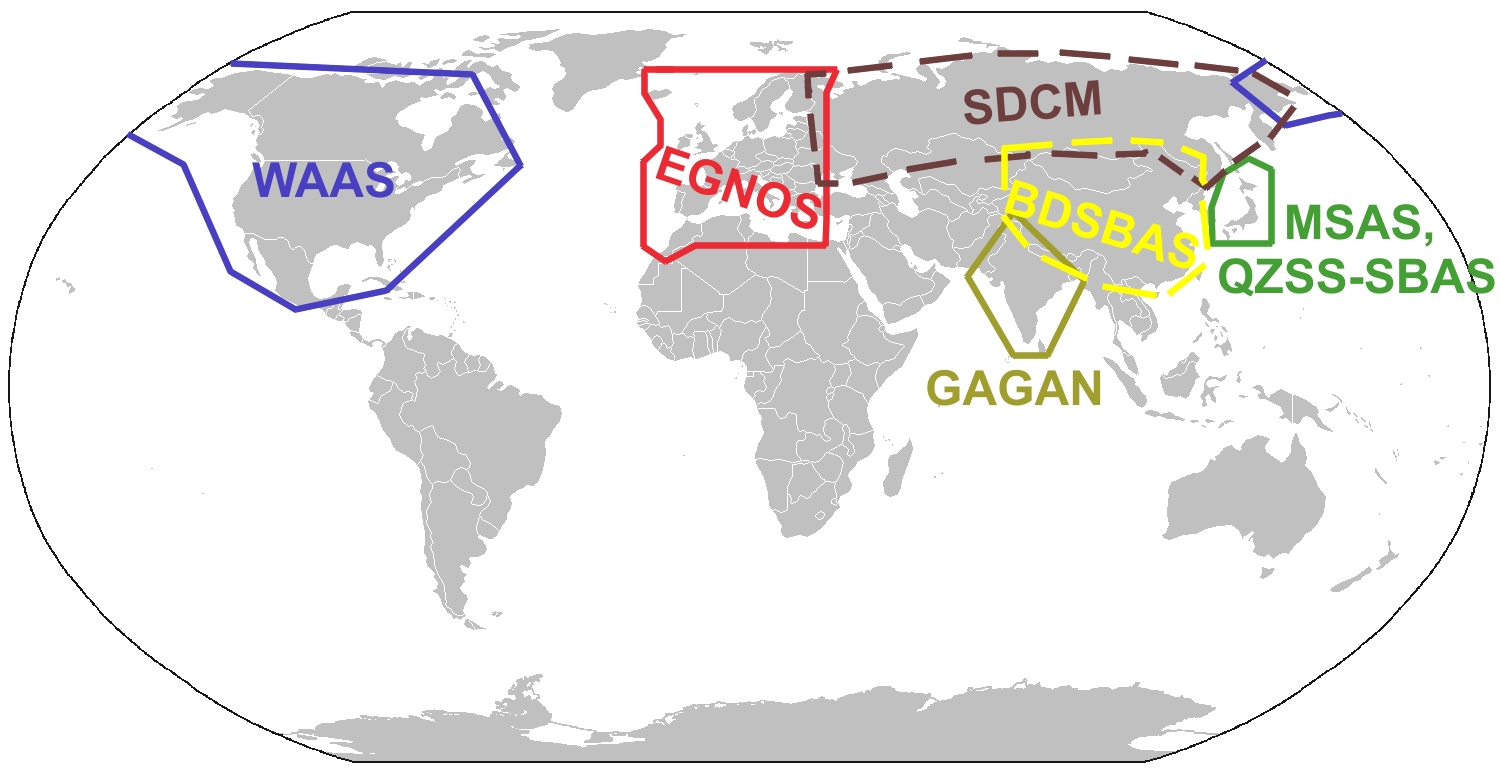
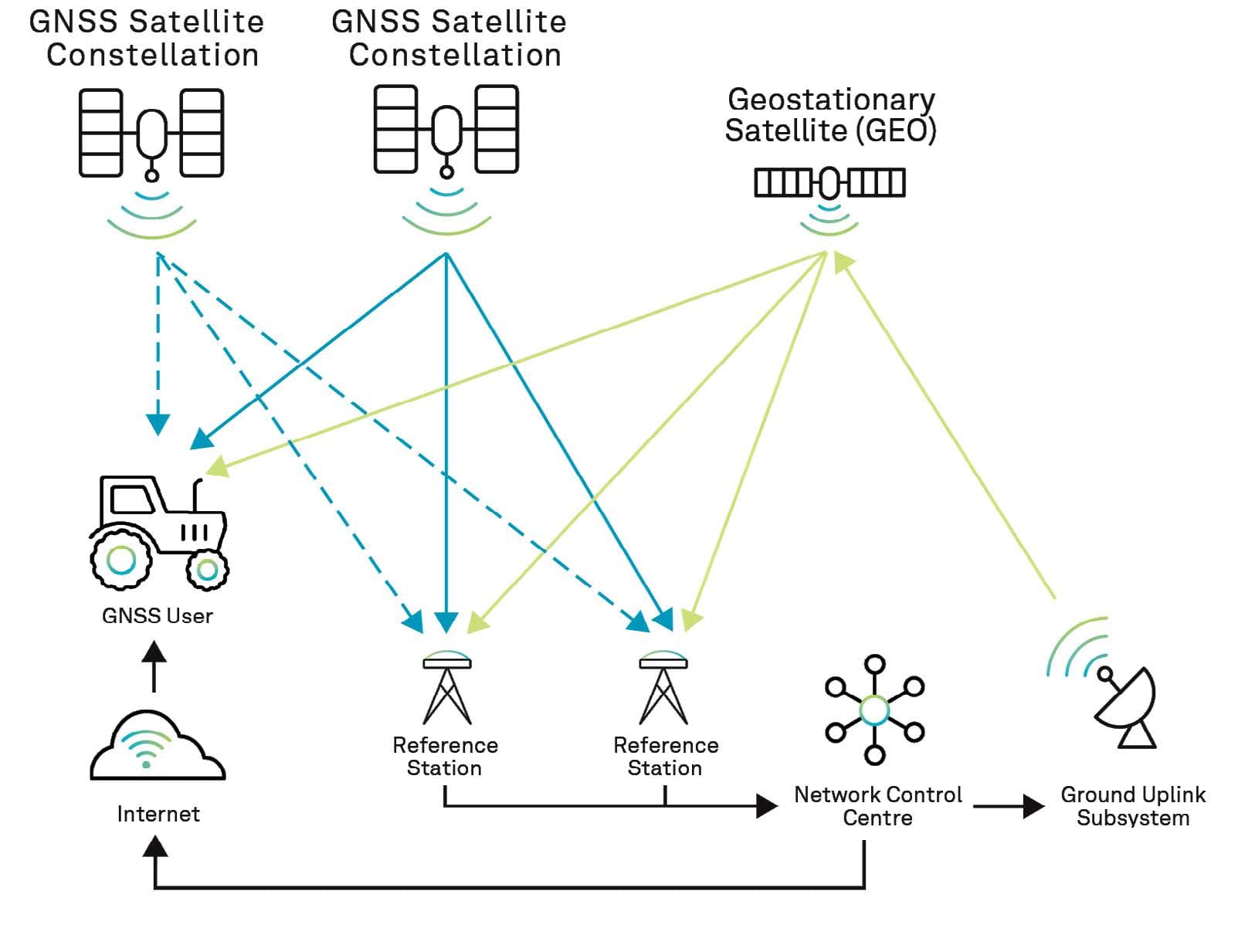
SBAS(衛星ベースの補強システム)
私の経験では、GNSS精度を向上させる地域システムは大きな利点となっています:
• WAAS(Wide Area Augmentation System): 北米
• EGNOS(European Geostationary Navigation Overlay Service): ヨーロッパ
• MSAS(Multi-functional Satellite Augmentation System): 日本
• GAGAN(GPS Aided GEO Augmented Navigation): インド
• SDCM(System for Differential Corrections and Monitoring): ロシア
これらのシステムは、3〜5mの精度を1〜2mに改善できる補正データを提供します。ヨーロッパのEGNOSや北米のWAASで飛行する際に、その恩恵を最も明確に実感しました。補正は特に高度精度に有効で、GNSS測位では通常最も弱い次元です。
精度の向上に加えて、SBASシステムは完全性監視も提供し、信頼性の低い衛星信号の特定に役立ちます。これは、正確なデータを持つことと同様に、位置データを信頼しないタイミングを知ることが重要な安全性の高いアプリケーションにとって価値があります。
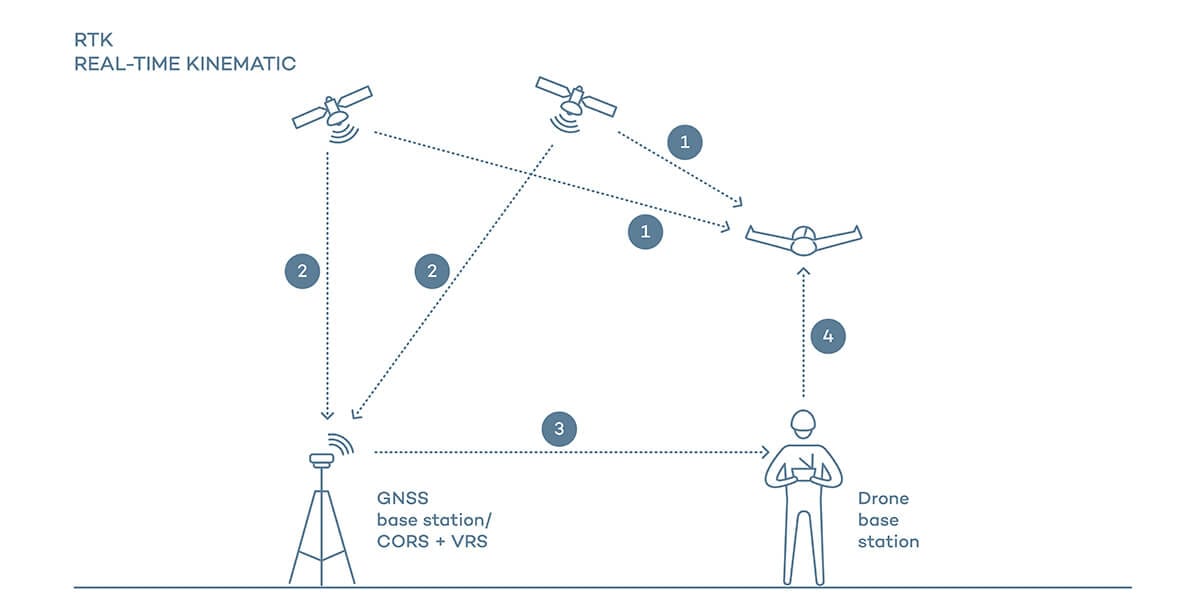
RTK(リアルタイムキネマティック)
マッピングおよび測量ドローンでは、RTKが変革をもたらしました:
基本原理: センチメートル精度のためのキャリア位相測定
構成要素:
- 基準局: 固定位置の基準
- ローバー: ドローン上の移動受信機
- 補正リンク: 無線またはネットワーク接続
精度: 理想的な条件下では通常1〜3cm
RTKを設定するには、より多くのコンポーネントと複雑さが必要ですが、精密なアプリケーションのためには結果は価値があります。私は4G/LTE接続を使用して、公共サービスからNTRIP補正を受信しています。これにより、ローカルの基地局の必要性がなくなります。
RTKで遭遇した主な制限事項は以下の通りです:
- 空の明瞭な視界が必要
- 基地局は約10km以内(ただし、ネットワークRTKではこれが拡張される)
- 信頼できる補正データリンク
- 初期化期間が必要
ほとんどのレクリエーション飛行では、RTKは過剰です。しかし、マッピング、測量、精密農業、自動着陸には非常に価値があります。センチメートル単位の精度で正確に同じ位置に繰り返し戻る能力は、多くのプロフェッショナルな用途を開きます。
PPP(精密単独測位)
RTKが実用的ではない私のいくつかのリモート探査フライトのために:
• 基本原理: 正確な衛星軌道とクロックデータを使用
• 利点: 基地局不要
• 欠点: 収束時間が長い(数分から数時間)
• 精度: デシメートルレベル(10〜30cm)
PPPは収束時間の要件のため、ドローンアプリケーションではあまり一般的ではありませんが、特定の専門的なアプリケーションには貴重な手法です。私はそれを、ドローンがマッピングパターンを開始する前に収束を達成する時間がある長時間のマッピングミッションに使用しました。
マルチバンド受信
ZED-F9Pのような最新のハイエンドモジュールは、複数の周波数帯を使用します:
• シングル周波数: ほとんどのドローンGNSS(L1/E1/B1)
• デュアル周波数: ハイエンドモジュール(L1+L5/E5/B2)
• 利点:
- マルチパス軽減の改善
- より速いRTK初期化
- 精度の向上
- 困難な環境でのパフォーマンス向上
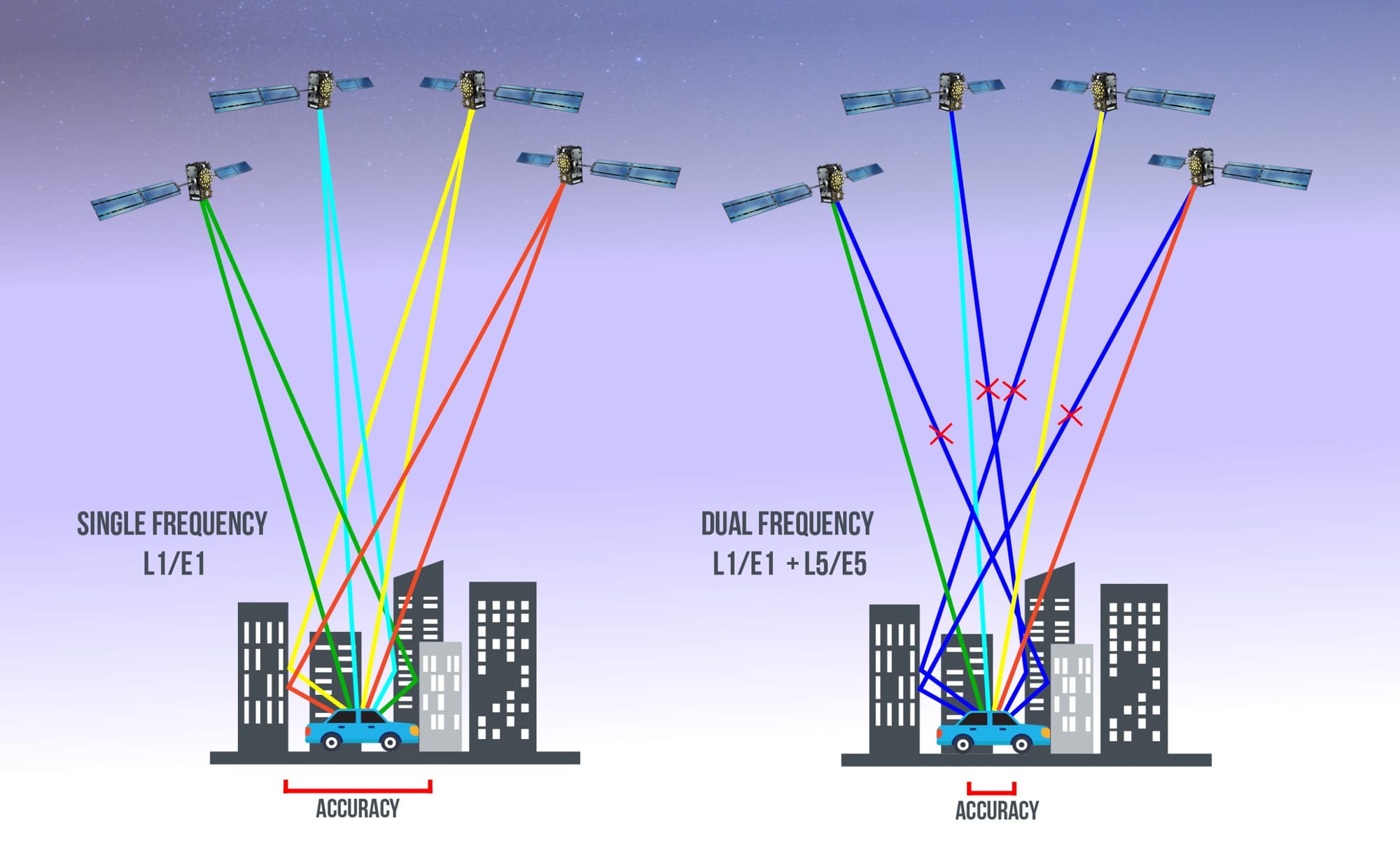
その違いは顕著です。F9Pを搭載した私の測量ドローンは、以前使用していた古いシングル周波数RTKシステムよりもはるかに速くRTKフィックスを達成します。マルチパス軽減は、水や建物のような反射面のある環境で特に価値があります。
GNSSの問題のトラブルシューティング
長年にわたり、私は数え切れないほどのGNSSの問題に遭遇し、解決してきました。ここでは、最も一般的な問題とその解決策を紹介します:
衛星受信不良
症状:
- 取得した衛星数が少ない
- HDOP値が高い
- 位置データが一貫していない
- 頻繁なGNSS損失
解決策:
- アンテナの配置を改善する - アンテナを干渉源から数センチ離すだけで劇的な改善が見られました。
- 干渉源から離れる - 特にビデオ送信機や電源ワイヤーから。
- マルチコンステレーションモジュールを使用する - より多くの衛星はより良い受信のチャンスを意味します。
- 物理的な障害物を確認する - 特にカーボンファイバーが問題となります。
- アンテナ接続を確認する - 緩い接続は断続的な問題を引き起こす可能性があります。
私は新しいビルドで受信不良のトラブルシューティングに何時間も費やしたことがありますが、カーボンファイバーのトッププレートが信号をブロックしていることがわかりました。モジュールを15mm高くするスタンドオフを追加することで、問題は即座に解決しました。
衛星取得の遅延
症状:
- 最初の測位までの時間が長い
- 飛行前のGPSロックが遅れる
解決策:
- 新しいモジュールにアップデートする - 世代ごとに取得時間が改善されています。
- 利用可能なすべてのコンステレーションを有効にする - より多くの衛星はより速い取得を意味します。
- 適切なダイナミックモデルを設定する - ドローンに「歩行者」を使用すると取得が遅くなる可能性があります。
- バッテリー電圧が安定していることを確認する - 電圧の低下は取得プロセスをリセットする可能性があります。
- 困難な環境では外部アンテナを検討する - 時には内蔵アンテナでは不十分な場合があります。
私は、フライト間にレシーバーに電源を入れたままにしておく(小型バッテリーを使用)ことで、暦データを維持し、取得時間を大幅に短縮できることがわかりました。
位置ドリフト
症状:
- 位置ホールドが徐々に移動する
- RTHが離陸地点から離れた場所に着陸する
- ウェイポイントが正確に追従されない
解決策:
- 衛星の受信状態が良くなるまで待つ(HDOPが低くなるまで) – 位置データを信頼する前に、私は常にHDOPが2.0未満になるまで待ちます。
- 必要な最小衛星数を増やす – 一般的に、衛星数が多いほど精度が向上します。
- 利用可能な場合はSBASを有効にする – 補正により、ドリフトを大幅に減らすことができます。
- コンパスに影響を与える磁気干渉をチェックする – コンパスの問題は、しばしばGNSSの問題として見えることがあります。
- 環境要因(木、建物)を考慮する – マルチパス反射により、位置のエラーが発生する可能性があります。
あるマッピングミッションで、ドローンが徐々にコースからドリフトしていくのに気づきました。問題は、モーターの影響を受けて較正が不十分なコンパスであることが判明しました。金属物体から離れた場所でコンパスを再較正することで、問題は解決しました。
GNSSのグリッチ
症状:
- 突然の位置ジャンプ
- 不安定なナビゲーション動作
- 一時的な位置喪失
解決策:
- GNSSフィルタリングパラメータを調整する – ほとんどのファームウェアには、GNSSデータを平滑化する設定があります。
- ナビゲーションスムージングを増やす – これにより、一時的なグリッチをフィルタリングできます。
- 断続的な電気的干渉をチェックする – スイッチング電源は一般的な原因です。
- 最新のファームウェアにアップデートする – 多くのGNSS問題はファームウェアのアップデートで対処されています。
- 新しい世代へのハードウェアのアップグレードを検討する – 新しいレシーバーは、スプリアス信号の除去性能が向上しています。
GNSSモジュールの電源入力にコンデンサを追加すると、電源システムからの電気ノイズによるグリッチを減らすのに役立つことがわかりました。
診断ツール
U-Center(Ublox設定ソフトウェア)
これは、GNSS問題を診断するための私の定番ツールです:
• 目的: Ublox GNSSレシーバーの設定と監視
• 機能:
- リアルタイムの衛星追跡
- 信号品質の監視
- 設定パラメータの調整
- ファームウェアのアップデート
- パフォーマンス分析
USBまたはフライトコントローラーからのUARTパススルーで接続します。衛星信号強度ビューは、干渉問題を特定するのに特に役立ちます – 特定の衛星だけでなく、すべての衛星の信号強度が低下しているのがわかります。
https://www.u-blox.com/en/product/u-center-ja/
GNSSビューア
ほとんどのフライトコントローラーソフトウェアに組み込まれています:
• 目的: GNSSのパフォーマンスを可視化する
• 例:
- Mission Planner GPS Status
- INAV GPS Setup Screen
- Betaflight GPS Tab
私は飛行前に必ずこれらをチェックして、良好な受信を確認します。私が監視する主要な指標は次のとおりです:
- 衛星数(多いほど良く、重要なミッションでは14以上が望ましい)
- HDOP値(低いほど良く、1.5未満を目指す)
- フィックスタイプ(ナビゲーションには3Dが必要、精密用途にはRTKフロート/フィックス)
- 信号強度(受信品質と潜在的な干渉を示す)
ブラックボックス分析
フライト後の診断用:
• 目的: フライト中のGNSSパフォーマンスを確認する
• ツール:
- Blackbox Explorer
- Flight Review (ArduPilot)
ブラックボックス分析により、飛行中には明らかでなかった多くの微妙な問題を特定しました。検討すべき主要なデータは次のとおりです:
- 時間経過に伴う位置精度
- ホームポイントのドリフト
- ナビゲーションのパフォーマンス
- GNSS信号品質
GNSSデータを他のセンサー(加速度計など)と比較することで、ナビゲーションのパフォーマンスに影響を与える統合の問題を明らかにできます。
GNSSテクノロジーの将来動向
最新のモジュールと業界の動向に関する私の経験に基づいて、GNSSテクノロジーの向かう方向について考えてみます:
ハードウェアの進歩
• マルチバンド標準: デュアル周波数は民生用デバイスでより一般的になっています。これが2〜3年以内にホビードローンに到達し、より高い精度と信頼性をもたらすと期待しています。
• 小型化: より小型で軽量な高性能モジュール。統合への流れは続き、GNSS、コンパス、気圧計、さらにはIMUが単一のパッケージに収められるでしょう。
• 統合: GNSS、コンパス、気圧計、無線の組み合わせ。一部のハイエンドモジュールですでにこれが見られ、配線が簡素化され、重量が軽減されます。
• 電力効率: 長距離ミッションのためのバッテリー寿命の延長。M10のSuper-Eモードはほんの始まりに過ぎません – 将来のモジュールは、さらに消費電力を削減する可能性があります。
• アンテナ技術: より小さなパッケージでの受信性能の向上。アンテナ設計は進歩し続け、より小さなフォームファクターからより高いパフォーマンスが得られるようになっています。
ソフトウェアのイノベーション
• アルゴリズムの改善: 位置推定とフィルタリングの向上。機械学習アプローチは商用システムで登場し始めており、最終的にはホビードローンにも到達するでしょう。
• AIによる位置推定の強化: 困難な環境での機械学習。都市の峡谷での測位を改善するためにニューラルネットワークを使用した初期研究を見たことがあります。
• センサーフュージョン: 他のナビゲーションセンサーとのより緊密な統合。GNSS、ビジュアルポジショニング、慣性航法の境界線は引き続きぼやけていくでしょう。
• インテグリティモニタリング: 信頼性の低い信号のより良い検出。ドローンがより自律的になるにつれ、GNSSデータを信頼しないタイミングを知ることがますます重要になります。
• セットアップの簡素化: より直感的な設定。GNSSセットアップの複雑さは多くのユーザーにとって障壁となってきましたが、新しいシステムはよりプラグアンドプレイになりつつあります。
新興テクノロジー
• LEO衛星ナビゲーション: 精度向上のための低軌道衛星コンステレーション。Starlinkのようなシステムは、従来のGNSSよりも都市部でのパフォーマンスが優れたナビゲーションサービスを提供できる可能性があります。
• ビジョン支援ナビゲーション: 困難な環境でGNSSを強化するカメラ。すでに一部のビルドでこれを使用しており、オプティカルフローセンサーがGNSSを補完して、より堅牢な位置推定を行っています。
• 量子センサー: 次世代の測位技術。まだ研究室の段階ですが、量子センサーは外部リファレンスなしで精度を劇的に向上させることを約束しています。
• 高度な認証: スプーフィング攻撃に対する保護。GNSSスプーフィングがより一般的になるにつれ、重要なアプリケーションでは認証機能がより重要になるでしょう。
• メッシュポジショニング: スウォームで位置データを共有するドローン。マルチドローンセットアップでこれを試したことがあり、ドローンは相対位置を使用して絶対位置の推定を強化できます。
FAQ: ドローンのGNSSテクノロジーに関するよくある質問
GPS、GNSS、GLONASSの違いは何ですか?
これは、人々のビルドを手伝うときに最もよく聞かれる質問の1つです:
• GPS(全地球測位システム): 米国宇宙軍が運用するアメリカの衛星航法システム。これは元々の、そして最も広く使用されているシステムです。
• GNSS(全地球航法衛星システム): GPS、GLONASS、Galileo、BeiDou、および地域システムを含むすべての衛星航法システムの総称。最新のレシーバーは通常、複数のGNSSコンステレーションを同時に使用します。
• GLONASS: ロシアの衛星航法システムで、GPSに似ていますが、軌道特性と信号構造が異なります。2番目に古いグローバルシステムで、高緯度で良好なカバレッジを提供します。
ドローンの「GPSモジュール」と言う場合、通常、アメリカのGPSシステムだけでなく、複数の衛星コンステレーションを使用できるGNSS受信機のことを指します。初心者の混乱を避けるため、私はこの点を常に明確にしています。
新世代のGNSSモジュールへのアップグレードは価値がありますか?
多数のドローンをアップグレードした経験から:
• M6/M7からM8へ: 取得時間、コンステレーションサポート、精度が大幅に向上。アップグレードする価値は十分にあります。
• M8からM9へ: 精度、更新レート、マルチコンステレーションのパフォーマンスが顕著に向上。本格的なナビゲーション用途ではアップグレードする価値があります。
• M9からM10へ: 感度、消費電力、都市部でのパフォーマンスが段階的に向上。特殊用途や消費電力が重要な場合は検討に値します。
ほとんどの趣味のパイロットにとって、M8Nモジュールは基本的なナビゲーションに十分で、M9Nはより高度な用途に優れたパフォーマンスを提供します。M10シリーズやF9Pは主にプロフェッショナルまたは特殊用途に有益です。
私は長距離探査ドローンをM8NからM9Nにアップグレードしましたが、取得時間と位置の安定性が即座に向上しました。GPSをリターントゥホームにのみ使用するフリースタイルクアッドでは、M8Nモジュールを使い続けています。その目的には十分だからです。
信頼性の高いナビゲーションには何個の衛星が必要ですか?
数十機のGNSS搭載ドローンでの経験から:
• 最小限の機能: 5~6個の衛星
• 推奨最小数: 8個の衛星
• 良好なパフォーマンス: 10~14個の衛星
• 優れたパフォーマンス: 15個以上の衛星
ただし、衛星数は方程式の一部に過ぎません。HDOP(水平精度低下率)も同様に重要です。HDOPの値が低い(理想的には2.0未満)ほど、衛星の配置が良好で、位置精度が高くなります。
20個以上の衛星があっても、すべての衛星が空の一部に集中していたためHDOPが悪く、位置精度が低かったことがあります。逆に、空全体に9個の衛星がよく分散していて、HDOPが低く、優れたパフォーマンスを発揮したこともあります。
最新のマルチコンステレーション受信機は、開けた空の状態で20個以上の衛星を捉えることができ、優れた冗長性と精度を提供します。
複数のコンステレーションを使用すると、バッテリーの消耗が速くなりますか?
飛行時間を気にするパイロットからよく聞かれる質問:
複数のGNSSコンステレーションを使用すると消費電力が少し増えますが、影響は比較的小さいです:
• GPSのみ: 基準の消費電力
• GPS+GLONASS: GPSのみより約10~15%多い電力
• GPS+GLONASS+Galileo+BeiDou: GPSのみより約20~30%多い電力
参考までに、一般的なM8Nモジュールの消費電流は約25mAですが、フルマルチコンステレーション構成では30~35mAになる可能性があります。飛行中の電流が5~20Aのドローンでは、この差は無視できるほど小さい(総消費電力の0.5%未満)です。
私は長距離機で差を測定しましたが、飛行時間への影響はほとんど感じられません。精度の向上、取得の高速化、信頼性の向上という利点は、ほとんどの場合、最小限の電力への影響を上回ります。
最も精度の高いGNSSコンステレーションはどれですか?
様々な地域でのテストから:
• GPS: 一般的に3~5mの精度、非常に一貫性があり信頼性が高い
• GLONASS: 通常4~7mの精度、高緯度で優れている
• Galileo: 1~3mの精度、民間の精密用途向けに設計
• BeiDou: 世界的に3~5m、アジア太平洋地域では2~3m
ただし、最高のパフォーマンスは、複数のコンステレーションを組み合わせて使用することで得られます。それぞれの長所と短所を補完し合うからです。利用可能なすべてのコンステレーションを使用する最新の受信機は、良好な条件下で通常1~3mの精度を達成します。これは単独のコンステレーションよりも優れています。
私の経験では、現在、Galileoが民間用途で最高の精度を提供していますが、その優位性は他のコンステレーションと組み合わせた場合に最も顕著です。
通常のドローンでRTKを使用できますか?
はい、いくつかの考慮事項を踏まえれば、通常のドローンでRTKを実装できます:
要件:
- RTK対応のGNSSモジュール(ZED-F9Pなど)
- RTKをサポートするフライトコントローラー(ArduPilot、制限付きのINAV)
- 補正用の基地局またはNTRIPサービス
- 補正データ送信用のデータリンク(テレメトリー無線、4G/LTE)
実用上の考慮事項:
- 追加コスト(RTKハードウェアに150~300ドル)
- セットアップの複雑さが増す
- 補正データソースの必要性
- 標準的なFPV飛行にはメリットが限定的
私はいくつかの機体にRTKを実装しましたが、センチメートル単位の精度は印象的ですが、レクリエーション飛行、レース、フリースタイルには一般的に不要です。RTKが意味を持つのは、マッピング、測量、精密農業、自動着陸用途などです。
測量用ドローンでは、ZED-F9Pモジュールと4G接続を使用して、公共サービスからNTRIP補正を受信しています。セットアップは標準的なGNSS実装よりも複雑でしたが、プロフェッショナルな用途では結果は価値があります。
環境要因はGNSSのパフォーマンスにどのように影響しますか?
様々な環境要因がGNSS受信に大きな影響を与える可能性があります:
• 都市の峡谷: 建物が信号を遮断・反射し、精度が5~10倍低下。単一コンステレーションの受信機では、高密度の都市環境で20m以上の位置誤差が発生したことがあります。
• 密な樹冠: 木々は信号を10~30dB減衰させ、衛星の可視性を低下させます。森林地帯で確実にナビゲーションするには、樹冠の上を飛行する必要があることがよくあります。
• 水域: 反射によりマルチパスエラーが発生する可能性があります。海岸線をマッピングする際、信号の反射により水際で位置がジャンプすることに気づきました。
• 天候: 大雨は信号を少し劣化させる可能性があります(1~2dBの減衰)。私の経験では、これが顕著なパフォーマンスの問題を引き起こすことはほとんどありません。
• 電離層の状態: 太陽活動が精度に影響を与える可能性があります。太陽嵐の際、わずかにパフォーマンスが低下することを観測しましたが、最新の受信機はこれをうまく処理します。
• 妨害源: 近くのRF干渉が受信を妨げる可能性があります。かつて、ワイヤレスマイクシステムが干渉を引き起こしていることに気づくまで、ドローンが位置ロックを拒否したことがありました。
マルチコンステレーション受信機は、より多くの衛星と周波数を提供することでこれらの問題を軽減するのに役立ちますが、どのGNSSシステムも環境上の課題から完全に免れているわけではありません。厳しい環境での重要な用途では、オプティカルフローやビジュアルポジショニングなどの補助的なナビゲーション技術の使用を常に検討します。
結論
GNSS技術は、軍事的な起源から劇的に進化し、現代のドローンシステムに不可欠な要素となっています。単一のGPSから複数のGNSS受信機への移行により、ナビゲーションのパフォーマンス、信頼性、機能が大幅に向上しました。
GPS、GLONASS、Galileo、BeiDouの違いや、初期のモジュールから最新のM10やF9P世代への受信機技術の進化を理解することで、ドローンパイロットはナビゲーションシステムについて適切な判断を下すことができます。レクリエーション、レース、フリースタイル、プロフェッショナルな用途で飛行する場合でも、適切なGNSS技術を選択し、正しく実装することで、ドローンの性能と安全性を高めることができます。
マルチバンド受信、アルゴリズムの改良、他のセンサーとの統合など、GNSS技術が進歩し続けるにつれ、困難な環境でのさらなる性能向上や、特殊用途での高精度な位置決めが期待できます。これらの発展について情報を得て、現在のセットアップを最適化する方法を理解することで、ドローンのナビゲーションシステムを最高の状態で機能させることができます。


