Tecnologia GNSS: Una guida completa per una navigazione sicura
Mentre "GPS" viene spesso utilizzato come termine generico per la navigazione satellitare nei droni, i moderni sistemi di navigazione in realtà sfruttano più costellazioni satellitari collettivamente note come GNSS (Global Navigation Satellite Systems). Dopo anni di costruzione e volo di droni con vari sistemi di navigazione, ho visto in prima persona come una corretta implementazione GNSS possa fare la differenza tra un drone che torna a casa in modo affidabile e uno che diventa un costoso ornamento per alberi. Questa guida completa esplora i diversi sistemi di navigazione satellitare, le loro caratteristiche, l'evoluzione dei moduli ricevitori GNSS e come queste tecnologie migliorano le capacità di navigazione dei droni.
Introduzione alla tecnologia GNSS
GNSS (Global Navigation Satellite System) si riferisce alla costellazione di satelliti che forniscono segnali dallo spazio che trasmettono dati di posizionamento e temporizzazione ai ricevitori GNSS. Questi ricevitori utilizzano quindi questi dati per determinare la posizione. Mentre il GPS è il GNSS più noto, esistono diversi altri sistemi e i ricevitori moderni spesso utilizzano più sistemi contemporaneamente per prestazioni migliori.

Ricordo ancora il mio primo drone dotato di GPS nel 2020. Utilizzava un modulo primitivo Ublox LEA-6H che impiegava quasi due minuti per ottenere un blocco di posizione e si spostava di diversi metri durante un hovering. Facendo un salto in avanti ad oggi, sto volando con ricevitori multi-costellazione che si bloccano in pochi secondi e mantengono la posizione con una precisione notevole. L'evoluzione è stata a dir poco rivoluzionaria per le capacità dei droni.
L'evoluzione della navigazione satellitare
La navigazione satellitare si è evoluta notevolmente dalla sua nascita:
• Origini militari (anni '70-'80): GPS sviluppato dal Dipartimento della Difesa degli Stati Uniti per applicazioni militari. La tecnologia era strettamente controllata e limitata nelle applicazioni civili.
• Accesso civile (anni '90): La politica di Disponibilità Selettiva ha reso il GPS deliberatamente meno accurato per uso civile. Le prime unità GPS avevano errori di oltre 100 metri!
• Pieno accesso civile (anni 2000): La rimozione della Disponibilità Selettiva ha permesso applicazioni civili precise. Questo è stato un cambiamento epocale che ha aperto la porta alla navigazione affidabile dei droni.
• Era multi-costellazione (anni 2010): Lo sviluppo e l'implementazione di sistemi alternativi come GLONASS, Galileo e BeiDou hanno creato ridondanza e migliorato le prestazioni. Ho notato un miglioramento significativo nell'affidabilità di navigazione dei miei droni quando sono passato da moduli solo GPS a moduli GPS+GLONASS intorno al 2022.
• Integrazione moderna (presente): I ricevitori multi-costellazione sono diventati standard nei dispositivi consumer. Oggi, anche i droni economici possono accedere a più di 30 satelliti contemporaneamente per un posizionamento a livello centimetrico.
Principi di base della navigazione satellitare
Tutti i sistemi GNSS operano su principi simili, anche se la comprensione di questi fondamenti mi ha aiutato a risolvere innumerevoli problemi di navigazione nel corso degli anni:
- Costellazione di satelliti: Una rete di satelliti in orbita attorno alla Terra trasmette segnali precisi di tempo e posizione. Più satelliti il tuo ricevitore può "vedere", migliore è la precisione della posizione.
- Trasmissione del segnale: Questi satelliti trasmettono informazioni precise su tempo e posizione su frequenze radio specifiche. I segnali sono incredibilmente deboli quando raggiungono la Terra - circa la stessa potenza di una lampadina da 50 watt vista da 12.000 miglia di distanza!
- Trilaterazione: Il ricevitore del tuo drone calcola la posizione misurando i ritardi di tempo da più satelliti. Mi piace spiegare questo come il ricevitore che chiede: "Quanto sono lontano dal satellite A? Quanto dal satellite B?" e così via, quindi determina l'unica posizione possibile che soddisfa tutte quelle distanze.
- Requisiti minimi: Hai bisogno di almeno 4 satelliti per il posizionamento 3D (latitudine, longitudine, altitudine). Ho imparato attraverso l'esperienza che mentre 4 satelliti funzioneranno, ne vuoi davvero 8+ per una navigazione affidabile del drone.
- Correzione degli errori: Varie tecniche migliorano la precisione tenendo conto di ritardi atmosferici, errori di clock e altri fattori. I ricevitori moderni sono notevolmente bravi in questo, ecco perché i droni di oggi possono mantenere la posizione con tale precisione.
Metriche di prestazioni chiave
Diversi fattori determinano le prestazioni GNSS e la comprensione di questi mi ha aiutato a scegliere i moduli giusti per diverse applicazioni:
• Precisione: Quanto è vicina la posizione misurata alla posizione reale. Per la navigazione standard dei droni, una precisione di 2-3 metri è solitamente sufficiente, ma per applicazioni di mappatura o di precisione, potrebbe essere necessaria una precisione a livello centimetrico.
• Disponibilità: La percentuale di tempo in cui il servizio è utilizzabile. Ho scoperto che i ricevitori multi-costellazione migliorano notevolmente questa metrica, soprattutto in ambienti impegnativi come aree urbane o sotto copertura parziale di alberi.
• Continuità: La capacità di funzionare senza interruzioni. Questo è fondamentale per le missioni autonome - un momentaneo dropout GNSS durante un volo a lungo raggio può essere disastroso.
• Integrità: Fiducia che il sistema stia fornendo informazioni corrette. I ricevitori moderni hanno algoritmi sofisticati per rilevare e rifiutare misurazioni errate.
• Tempo per il primo fix (TTFF): Quanto velocemente può essere stabilita una posizione. Ricordo i giorni di attesa di diversi minuti con ricevitori di fascia bassa per un blocco GPS prima del decollo - ora in genere sono secondi con i moduli moderni.
• Frequenza di aggiornamento: Con quale frequenza viene aggiornata la posizione. Per le gare o il volo dinamico, frequenze di aggiornamento più elevate (10Hz+) forniscono una navigazione notevolmente più fluida.
Principali costellazioni GNSS
Nel corso degli anni, ho utilizzato ricevitori che supportano varie combinazioni di questi sistemi e ognuno ha i suoi punti di forza e di debolezza. Comprendere le loro differenze mi ha aiutato a ottimizzare i miei droni per diverse condizioni di volo.
GPS (Global Positioning System)
Il sistema di navigazione satellitare originale e più ampiamente utilizzato:
• Paese/Regione: Stati Uniti
• Operatività iniziale: 1978 (limitata), piena capacità operativa nel 1995
• Satelliti: 31 satelliti operativi (24 necessari per la copertura globale)
• Caratteristiche orbitali:
- Orbita terrestre media a circa 20.200 km
- 6 piani orbitali con 4+ satelliti ciascuno
- Periodo orbitale di 12 ore
• Frequenze di segnale:
- L1 (1575,42 MHz) - Frequenza civile primaria
- L2 (1227,60 MHz) - Utilizzata per applicazioni militari e civili avanzate
- L5 (1176,45 MHz) - Frequenza più recente per applicazioni di sicurezza della vita
• Precisione:
- Servizio di posizionamento standard (SPS): ~3-5 metri
- Servizio di posizionamento preciso (PPS): ~<1 metro (militare)
Il GPS è stato la spina dorsale della navigazione dei droni per anni e lo considero ancora il sistema più affidabile in assoluto. Ho volato in aree remote in tutto il mondo e la copertura GPS mi ha raramente deluso. La maturità del sistema e il continuo programma di modernizzazione lo rendono una scelta affidabile per la maggior parte delle applicazioni.
Una limitazione del GPS è che le sue prestazioni possono degradare ad alte latitudini (vicino ai poli) a causa della configurazione dell'orbita dei satelliti. I segnali possono anche essere influenzati dai canyon urbani e dalla fitta vegetazione, motivo per cui l'accesso a più costellazioni è così prezioso.
GLONASS (GLObal NAvigation Satellite System)
L'alternativa russa al GPS è diventata un importante complemento nei ricevitori moderni:
• Paese/Regione: Russia
• Operatività iniziale: 1982 (limitata), piena capacità operativa ripristinata nel 2011
• Satelliti: 24 satelliti operativi
• Caratteristiche orbitali:
- Orbita terrestre media a circa 19.100 km
- 3 piani orbitali con 8 satelliti ciascuno
- Periodo orbitale di 11 ore e 15 minuti
• Frequenze di segnale:
- L1 (1598,0625 - 1605,375 MHz)
- L2 (1242,9375 - 1248,625 MHz)
- L3 (1202,025 MHz)
• Precisione:
- Precisione standard: ~4-7 metri
- Alta precisione: ~<1 metro (militare)
Ho aggiunto per la prima volta la capacità GLONASS ai miei droni intorno al 2022 e il miglioramento è stato immediatamente percepibile. Il sistema funziona particolarmente bene alle alte latitudini - ho volato nel nord della Norvegia dove i satelliti GLONASS erano spesso più numerosi del GPS nella vista del mio ricevitore.
GLONASS integra il GPS estremamente bene nei ricevitori combinati. Mentre storicamente meno stabile del GPS (c'è stato un periodo negli anni '90 in cui il sistema è quasi collassato), il GLONASS moderno è molto affidabile. Ho scoperto che avere entrambi i sistemi attivi fornisce un'eccellente ridondanza - se un sistema ha problemi, l'altro mantiene il drone in navigazione sicura.
Galileo
Il GNSS controllato dai civili dell'Unione Europea è il più recente attore principale e sono rimasto impressionato dalle sue prestazioni:
• Paese/Regione: Unione Europea
• Operatività iniziale: 2016 (servizi iniziali), piena capacità operativa prevista entro il 2026
• Satelliti: 28 previsti (24 operativi + 4 di riserva), 26 attualmente in orbita
• Caratteristiche orbitali:
- Orbita terrestre media a circa 23.222 km
- 3 piani orbitali con 8-10 satelliti ciascuno
- Periodo orbitale di 14 ore
• Frequenze di segnale:
- E1 (1575,42 MHz) - Stessa di GPS L1
- E5a (1176,45 MHz) - Stessa di GPS L5
- E5b (1207,14 MHz)
- E6 (1278,75 MHz)
• Precisione:
- Servizio aperto: ~1-3 metri
- Servizio ad alta precisione: ~20 cm
- Servizio pubblico regolamentato: crittografato per uso governativo
Quando ho abilitato Galileo sui miei droni intorno al 2022, ero scettico sul fatto che avrebbe fatto una differenza percepibile. Con mia sorpresa, l'ha fatto - in particolare negli ambienti urbani dove gli edifici possono bloccare alcuni segnali satellitari. Avere quei satelliti Galileo aggiuntivi in vista ha fornito prestazioni di navigazione più coerenti.
Galileo è stato progettato specificamente per applicazioni civili, con una precisione superiore al GPS standard. Apprezzo il suo avanzato monitoraggio dell'integrità, che aiuta a rilevare e mitigare segnali inaffidabili. Il sistema è anche completamente interoperabile con il GPS, rendendo l'integrazione senza soluzione di continuità nei ricevitori moderni.
Sebbene Galileo non abbia ancora raggiunto la piena capacità operativa, sta già fornendo un servizio eccellente. L'unica limitazione che ho riscontrato è che alcuni ricevitori più vecchi non lo supportano, ma qualsiasi modulo GNSS moderno sfrutterà appieno questi satelliti.
BeiDou (BDS)
Il sistema di navigazione satellitare cinese si è rapidamente evoluto fino a diventare un attore globale:
• Paese/Regione: Cina
• Operatività iniziale: BeiDou-1 (2000), BeiDou-2 (2012), BeiDou-3 (2020)
• Satelliti: 35 satelliti operativi
• Caratteristiche orbitali:
- Mix di orbita terrestre media (27 satelliti a 21.500 km)
- Orbita geostazionaria (5 satelliti)
- Orbita geosincronizzata inclinata (3 satelliti)
• Frequenze di segnale:
- B1I (1561,098 MHz)
- B1C (1575,42 MHz) - Stessa di GPS L1
- B2a (1176,45 MHz) - Stessa di GPS L5
- B2b (1207,14 MHz) - Stessa di Galileo E5b
- B3I (1268,52 MHz)
• Precisione:
- Servizio globale: ~3-5 metri
- Servizio regionale: ~2-3 metri
Ho iniziato a utilizzare ricevitori compatibili con BeiDou intorno al 2022 e il sistema si è dimostrato una preziosa aggiunta all'ecosistema GNSS. L'aspetto unico di BeiDou è il suo design a costellazione ibrida, con satelliti in diversi tipi di orbita. Ciò fornisce una copertura migliorata nella regione Asia-Pacifico, dove ho notato prestazioni particolarmente forti.
Una caratteristica interessante di BeiDou che altri sistemi non hanno è la sua capacità di messaggistica - il sistema può effettivamente trasmettere brevi messaggi di testo, anche se questo non viene solitamente utilizzato nelle applicazioni per droni. Il servizio globale completo è stato completato nel 2020, rendendo BeiDou il più recente sistema di navigazione globale completo.
Nella mia esperienza, l'integrazione di BeiDou è stata senza soluzione di continuità nei ricevitori moderni, sebbene la documentazione in inglese fosse limitata nei primi giorni. Oggi è una parte standard dei ricevitori multi-costellazione e contribuisce in modo significativo alle prestazioni di navigazione complessive.
Sistemi regionali
Oltre ai sistemi globali, esistono diversi sistemi GNSS regionali che possono fornire ulteriori vantaggi in aree specifiche:
QZSS (Quasi-Zenith Satellite System)
• Paese/Regione: Giappone
• Copertura: Giappone e regione Asia-Oceania
• Satelliti: 4 satelliti operativi
QZSS è progettato per funzionare nei canyon urbani del Giappone, con satelliti in orbite che li mantengono ad alte elevazioni sul Giappone. Ho visto persone volare con ricevitori abilitati QZSS a Tokyo e il miglioramento delle prestazioni urbane era percepibile - le posizioni erano più stabili tra gli edifici alti rispetto alle sole costellazioni globali.
NavIC (Navigation with Indian Constellation)
• Paese/Regione: India
• Copertura: India e regione circostante (1.500 km)
• Satelliti: 7 satelliti operativi
NavIC è ottimizzato per il subcontinente indiano. Sebbene non l'abbia testato personalmente in modo approfondito, i colleghi che volano in India riportano buoni risultati quando i loro ricevitori supportano questo sistema regionale oltre alle costellazioni globali.
Vantaggi multi-costellazione per i droni
L'utilizzo simultaneo di più costellazioni GNSS offre diversi vantaggi per le operazioni con i droni. Ho sperimentato in prima persona questi benefici man mano che aggiornavo i miei sistemi di navigazione nel corso degli anni.
Miglioramento della disponibilità dei satelliti
Il vantaggio più immediato dei ricevitori multi-costellazione è semplicemente avere più satelliti in vista:
• Più satelliti visibili: le costellazioni combinate forniscono oltre 30 satelliti visibili in condizioni di cielo aperto. Vedo regolarmente 20-25 satelliti, rispetto a soli 8-10 con il solo GPS.
• Prestazioni nei canyon urbani: migliore posizionamento nelle città e nelle aree ostruite. Ho volato tra edifici dove i ricevitori solo GPS avrebbero perso il blocco, ma i sistemi multi-costellazione hanno mantenuto una navigazione stabile.
• Riduzione della diluizione geometrica della precisione (GDOP): più satelliti significa una migliore geometria e un posizionamento più accurato. Questo si traduce in un hovering e una navigazione più precisi.
• Impatto pratico: riscontro meno interruzioni del GPS durante il volo, in particolare in ambienti difficili. Questo ha salvato diversi dei miei droni da potenziali fughe o incidenti.
Precisione migliorata
Più costellazioni che lavorano insieme migliorano la precisione complessiva del posizionamento:
• Media degli errori: sistemi multipli aiutano a fare la media degli errori dei singoli sistemi. Ho osservato che il mantenimento della posizione migliora da ±3 metri con il solo GPS a una precisione sub-metrica con ricevitori multi-costellazione.
• Convalida incrociata: le posizioni di diversi sistemi possono convalidarsi a vicenda, rifiutando i valori anomali. Questo ha eliminato gli occasionali "salti" di posizione che vedevo con i ricevitori a singola costellazione.
• Precisione migliorata: i calcoli di posizione che utilizzano più satelliti sono generalmente più precisi. Questo è particolarmente evidente nel mantenimento dell'altitudine, che tende ad essere la dimensione più debole nel posizionamento GNSS.
• Impatto pratico: i miei droni ora mantengono un posizionamento e una navigazione più stabili, rendendo le missioni autonome più affidabili e le riprese video più fluide.
Ridondanza del sistema
Forse il vantaggio più importante per le operazioni critiche dei droni è la ridondanza:
• Protezione dai guasti: se un sistema ha problemi, gli altri possono compensare. Una volta ho volato attraverso un'area con jamming GPS (probabilmente non intenzionale), ma il mio drone ha continuato a navigare normalmente usando GLONASS e Galileo.
• Resistenza al jamming: diverse frequenze rendono più difficile il jamming completo. Questo è particolarmente importante per le operazioni professionali in cui l'integrità del segnale è fondamentale.
• Rilevamento dello spoofing: le discrepanze tra i sistemi possono indicare tentativi di spoofing. Anche se raro, lo spoofing GPS è una preoccupazione crescente per le operazioni sensibili dei droni.
• Impatto pratico: ho riscontrato che le funzioni di ritorno a casa e autonome sono significativamente più affidabili con i ricevitori multi-costellazione. Questo fornisce tranquillità durante i voli a lungo raggio.
Acquisizione più rapida
Ottenere rapidamente un blocco di posizione è importante per operazioni sul campo efficienti:
• Elaborazione parallela: i ricevitori possono acquisire segnali da più sistemi contemporaneamente. Questo riduce drasticamente il tempo di attesa prima del decollo.
• TTFF ridotto: stabilimento più rapido della posizione all'avvio. Quello che una volta richiedeva minuti ora richiede secondi.
• Miglioramento dell'avvio a freddo: particolarmente vantaggioso per gli avvii a freddo quando il ricevitore non ha dati satellitari recenti. Ho visto i tempi di avvio a freddo scendere da oltre 60 secondi a meno di 30 secondi con i ricevitori multi-costellazione.
• Impatto pratico: un blocco GPS più rapido prima del decollo significa meno tempo di attesa e più tempo di volo. Questo è particolarmente prezioso in contesti professionali in cui il tempo è denaro.
Evoluzione dei ricevitori GNSS per droni
Ho usato quasi ogni generazione di ricevitore GNSS nei miei droni e l'evoluzione è stata notevole. Ogni generazione ha portato miglioramenti significativi nelle prestazioni, nelle dimensioni e nelle capacità.
Generazioni di ricevitori
Primi GPS per droni (2010-2014)
I miei primi droni equipaggiati con GPS utilizzavano moduli come Ublox LEA-6 e NEO-6. Questi erano rivoluzionari all'epoca ma primitivi secondo gli standard odierni:
• Caratteristiche:
- Ricezione solo GPS
- Frequenze di aggiornamento più lente (1-5Hz)
- Sensibilità inferiore
- Dimensioni maggiori
- Maggiore consumo energetico
• Prestazioni:
- Precisione: 5-10 metri
- TTFF: 45-60 secondi di avvio a freddo
- Capacità satellitare: 12-16 canali
Ricordo la frustrazione di aspettare un blocco GPS prima di ogni volo, spesso in piedi in un campo aperto per diversi minuti. Il mantenimento della posizione era al massimo approssimativo, con il drone che si spostava di diversi metri in ogni direzione. Il ritorno a casa era un'esperienza snervante: non si sapeva mai esattamente dove il drone avrebbe deciso che fosse "casa"!
GNSS di media generazione (2015-2018)
Ad un certo punto sono passato a moduli come Ublox NEO-7 e NEO-M8N, che hanno portato miglioramenti significativi:
• Caratteristiche:
- Ricezione GPS + GLONASS
- Frequenze di aggiornamento moderate (5-10Hz)
- Sensibilità migliorata
- Fattori di forma più piccoli
- Riduzione del consumo energetico
• Prestazioni:
- Precisione: 2-5 metri
- TTFF: 30-45 secondi di avvio a freddo
- Capacità satellitare: 32-72 canali
L'aggiunta del GLONASS è stata un punto di svolta per l'affidabilità. Ho notato immediatamente che i miei droni mantenevano il blocco di posizione in aree dove prima facevano fatica. L'M8N è diventato il cavallo di battaglia della navigazione dei droni in questo periodo - ho ancora diversi droni che volano con questi moduli oggi.
GNSS moderni (2019-2022)
Nel 2022, ho iniziato ad aggiornare la mia flotta con moduli come Ublox NEO-M9N e SAM-M8Q:
• Caratteristiche:
- Multi-costellazione (GPS, GLONASS, Galileo, BeiDou)
- Frequenze di aggiornamento più veloci (10-18Hz)
- Alta sensibilità
- Design compatti
- Funzionamento a basso consumo energetico
• Prestazioni:
- Precisione: 1-3 metri
- TTFF: 15-30 secondi di avvio a freddo
- Capacità satellitare: 72-184 canali
Il miglioramento delle prestazioni è stato sostanziale. Il mantenimento della posizione è diventato solidissimo e la precisione del ritorno a casa è migliorata fino a un metro dal punto di decollo. La possibilità di utilizzare tutte e quattro le principali costellazioni contemporaneamente ha fornito un'eccellente ridondanza e prestazioni in ambienti difficili.
Ultima generazione (2023-presente)
Le mie costruzioni più recenti utilizzano moduli all'avanguardia come Ublox NEO-M10 e ZED-F9P (per applicazioni RTK):
• Caratteristiche:
- Completamente multi-costellazione, multi-frequenza
- Frequenze di aggiornamento elevate (fino a 25Hz)
- Sensibilità estremamente elevata
- Pacchetti ultra-compatti
- Consumo energetico molto basso
- Capacità RTK nei modelli di fascia alta
• Prestazioni:
- Precisione: 0,5-2 metri (standard), 1-3cm (RTK)
- TTFF: 5-15 secondi di avvio a freddo
- Capacità satellitare: oltre 184 canali
Questi ultimi moduli rappresentano un salto quantico nelle prestazioni. La serie M10 offre una sensibilità e un'efficienza energetica eccezionali, mentre l'F9P porta la precisione RTK di livello topografico ai droni consumer. Sono rimasto particolarmente colpito dalle loro prestazioni in ambienti difficili come le aree urbane e la leggera copertura forestale.
Uno sguardo dettagliato ai popolari moduli GNSS per droni
Nel corso degli anni, ho utilizzato la maggior parte dei moduli GNSS più diffusi in varie costruzioni. Ecco la mia valutazione delle loro capacità e delle applicazioni ideali:
Ublox NEO-M8N
Il cavallo di battaglia del GNSS per droni per molti anni e ancora ampiamente utilizzato:
• Costellazioni: GPS, GLONASS, Galileo, BeiDou (ricezione simultanea di un massimo di 3)
• Canali: 72 canali di tracciamento
• Frequenza di aggiornamento: fino a 10Hz (tipicamente 5Hz nei droni)
• Sensibilità: -167dBm di tracciamento
• Precisione: 2,5m CEP (Circular Error Probable)
• Consumo energetico: 23mA @ 3,3V
Ho installato dozzine di moduli M8N in vari droni e offrono un eccellente equilibrio tra prestazioni e costo. Il modulo supporta la ricezione simultanea di fino a tre costellazioni, anche se in genere utilizzo GPS+GLONASS per la migliore combinazione di prestazioni ed efficienza energetica.
Una limitazione che ho scoperto è che abilitare tutte le costellazioni contemporaneamente può a volte causare problemi di tracciamento a causa delle limitazioni dei canali. Per la maggior parte delle applicazioni, GPS+GLONASS o GPS+Galileo fornisce i migliori risultati.

L'M8N è ancora una scelta solida per la navigazione general-purpose, il ritorno a casa e il mantenimento della posizione. Le implementazioni comuni includono il BN-180, il BN-220 e molti moduli FC integrati.
Ublox NEO-M9N
Il successore aggiornato dell'M8N, che offre miglioramenti significativi:
• Costellazioni: GPS, GLONASS, Galileo, BeiDou (ricezione simultanea di tutti)
• Canali: 184 canali di tracciamento
• Frequenza di aggiornamento: Fino a 25Hz (tipicamente 10Hz nei droni)
• Sensibilità: -167dBm tracciamento
• Precisione: 1,5m CEP (Circular Error Probable)
• Consumo energetico: 45mA @ 3,3V (acquisizione), 34mA (tracciamento)
Quando ho aggiornato il mio drone principale a lungo raggio da un M8N a un M9N, la differenza è stata immediatamente percepibile. L'M9N può tracciare tutte le costellazioni contemporaneamente senza limitazioni di canali, fornendo un'eccellente ridondanza e prestazioni.
La frequenza di aggiornamento più elevata (10Hz vs 5Hz) si traduce in una navigazione più fluida e in regolazioni di posizione più reattive. Ho trovato l'M9N particolarmente utile per la navigazione di precisione e le missioni waypoint, dove il miglioramento della precisione fa una differenza percepibile.

Uno svantaggio è il consumo energetico leggermente superiore, anche se è ancora trascurabile nel contesto del consumo energetico complessivo del drone. Le implementazioni comuni includono il Matek M9N-5883 e l'HGLRC M9N.
Ublox NEO-M10S
L'ultima generazione di GNSS standard, che spinge i limiti delle prestazioni:
• Costellazioni: GPS, GLONASS, Galileo, BeiDou, QZSS, NavIC (ricezione simultanea di tutti)
• Canali: 184+ canali di tracciamento
• Frequenza di aggiornamento: Fino a 25Hz
• Sensibilità: -170dBm tracciamento
• Precisione: 1,0m CEP (Circular Error Probable)
• Consumo energetico: 38mA @ 3,3V (piena potenza), 12mA (risparmio energetico)
Ho recentemente iniziato a testare la serie M10 nelle mie build più recenti e i miglioramenti sono sottili ma significativi. La caratteristica più notevole è l'eccezionale efficienza energetica: la modalità Super-E può ridurre il consumo energetico fino al 70% mantenendo le prestazioni.
La sensibilità migliorata (-170dBm vs -167dBm) si traduce in prestazioni migliori in ambienti impegnativi come i canyon urbani o sotto una leggera copertura di alberi. Ho notato un tracciamento satellitare più coerente in aree in cui le generazioni precedenti a volte perdevano il blocco.

L'M10 è ideale per missioni a lungo raggio in cui l'efficienza energetica è importante e per volare in ambienti impegnativi. È ancora relativamente nuovo nel mercato dei droni, ma mi aspetto che diventi il nuovo standard man mano che la disponibilità migliora.
Ublox ZED-F9P
Il modulo ad alta precisione con capacità RTK per applicazioni professionali:
• Costellazioni: GPS, GLONASS, Galileo, BeiDou (ricezione simultanea di tutti)
• Canali: 184 canali di tracciamento
• Frequenza di aggiornamento: Fino a 25Hz
• Sensibilità: -167dBm tracciamento
• Precisione: 1,0m CEP standard, 1cm + 1ppm con RTK
• Consumo energetico: 68mA @ 3,3V
Per i miei droni di mappatura e rilevamento, l'F9P è stato trasformativo. La ricezione multi-banda (L1/L2/L5) e la capacità RTK consentono un posizionamento a livello centimetrico, essenziale per applicazioni di precisione.
L'impostazione di RTK richiede componenti aggiuntivi: una stazione base o un servizio NTRIP per le correzioni, più un collegamento dati per trasmettere tali correzioni al drone. Utilizzo una connessione 4G/LTE per il mio drone di rilevamento, che mi consente di ricevere correzioni NTRIP da servizi pubblici.

L'F9P è eccessivo per i droni FPV o fotografici standard, ma è prezioso per applicazioni di mappatura, rilevamento, agricoltura di precisione e atterraggio automatizzato. Le implementazioni comuni includono l'Here3 e l'Holybro H-RTK F9P.
Guida alla selezione del modulo
La scelta del modulo GNSS giusto dipende dalle tue esigenze specifiche. Ecco i miei consigli pratici basati su anni di costruzione e volo di diverse configurazioni:
Per la navigazione di base
• Consigliato: NEO-M8N o equivalente
• Considerazioni chiave:
- Adeguato per RTH e mantenimento della posizione
- Buon equilibrio tra prestazioni e costo
- Ampiamente supportato in tutti i firmware di navigazione
- In genere include la bussola
Utilizzo ancora i moduli M8N in molte delle mie build perché sono convenienti e offrono buone prestazioni per la navigazione generale. Se stai costruendo un drone FPV standard con occasionali esigenze di mantenimento della posizione e ritorno a casa, l'M8N è ancora una scelta valida.
Per la navigazione avanzata
• Consigliato: NEO-M9N o equivalente
• Considerazioni chiave:
- Migliore per le missioni waypoint
- Aggiornamenti di posizione più veloci
- Più affidabile in ambienti impegnativi
- Vale la pena l'aggiornamento per una navigazione seria
Per i miei droni waypoint autonomi e le build a lungo raggio, ho standardizzato sull'M9N. La precisione e la frequenza di aggiornamento migliorate fanno una differenza evidente nelle prestazioni di navigazione e la capacità di utilizzare tutte le costellazioni contemporaneamente migliora l'affidabilità in ambienti diversi.
Per applicazioni professionali
• Consigliato: NEO-M10 o ZED-F9P
• Considerazioni chiave:
- M10 per le migliori prestazioni GNSS standard
- F9P quando è richiesta una precisione centimetrica
- Considerare le implicazioni di potenza e peso
- Potrebbe richiedere configurazione e setup aggiuntivi
I miei droni per rilevamento e mappatura utilizzano l'F9P per un posizionamento con precisione centimetrica. Per l'esplorazione a lungo raggio dove la precisione standard a livello di metro è sufficiente ma l'affidabilità è fondamentale, l'M10 fornisce la migliore combinazione di prestazioni ed efficienza energetica.
Per lungo raggio/resistenza
• Consigliato: NEO-M10 con gestione dell'alimentazione
• Considerazioni chiave:
- L'efficienza energetica diventa critica
- L'affidabilità è fondamentale
- Considerare la qualità e il posizionamento dell'antenna
- Sistemi di navigazione di backup consigliati
Per le mie build a più lungo raggio, l'efficienza energetica e l'affidabilità sono le priorità principali. La modalità Super-E dell'M10 fornisce un eccellente risparmio energetico mantenendo le prestazioni. Presto anche particolare attenzione alla qualità e al posizionamento dell'antenna, poiché la ricezione del segnale diventa sempre più importante più lontano si vola.
Implementazione del modulo GNSS
Come si implementa il modulo GNSS può essere altrettanto importante di quale modulo si sceglie. Ho imparato molte lezioni sull'installazione ottimale attraverso prove ed errori.
Integrazione hardware
Considerazioni sull'antenna
L'antenna è fondamentale per le prestazioni GNSS - una lezione che ho imparato a mie spese dopo diverse build con un posizionamento dell'antenna non ottimale:
• Antenne patch: Le più comuni nei moduli per droni
- Vantaggi: Compatte, direzionali verso l'alto, buona visuale del cielo
- Svantaggi: Le prestazioni variano con l'orientamento
- Migliori pratiche: Montare in piano con una chiara visuale del cielo

La maggior parte dei miei droni utilizza antenne patch, che funzionano bene quando montate in piano sulla piastra superiore con una chiara visuale del cielo. Ho scoperto che anche una leggera inclinazione può ridurre le prestazioni, quindi faccio attenzione ad assicurarmi che l'antenna sia perfettamente orizzontale.
• Antenne elicoidali: Si trovano in alcuni moduli ad alte prestazioni
- Vantaggi: Migliore ricezione a basse elevazioni, meno sensibili all'orientamento
- Svantaggi: Più grandi, più costose
- Migliori pratiche: Necessitano comunque di una ragionevole esposizione al cielo

Per le mie build a lungo raggio, preferisco le antenne elicoidali nonostante le loro dimensioni maggiori. Sono meno sensibili all'orientamento e forniscono una migliore ricezione quando il drone è inclinato durante le virate, il che aiuta a mantenere il blocco satellitare durante le manovre aggressive.
• Antenne esterne: Opzione per alcuni moduli
- Vantaggi: Posizionamento flessibile, potenzialmente migliori prestazioni
- Svantaggi: Peso aggiunto, complessità, potenziali danni
- Migliori pratiche: Utilizzare cavi di alta qualità, ridurre al minimo la lunghezza
Uso antenne esterne sui miei droni per mappatura per separare l'antenna dalle fonti di interferenza. La chiave è usare cavi corti e di alta qualità - ho imparato dall'esperienza che i cavi economici possono degradare significativamente il segnale.
Piano di massa
Il piano di massa influisce sulle prestazioni dell'antenna - un dettaglio che molti costruttori trascurano:
• Scopo: Riflette i segnali e migliora la ricezione
• Implementazione: Piastra metallica o area PCB sotto l'antenna
• Dimensioni: Idealmente almeno 60-80 mm di diametro per prestazioni ottimali
• Alternative: Alcuni moduli includono un piano di massa integrato

Dopo aver sperimentato diverse configurazioni del piano di massa, ho scoperto che un semplice disco di alluminio (circa 70 mm di diametro) sotto il modulo GNSS può migliorare la ricezione di 2-3 dB - equivalente a una sensibilità migliore del 30-50%. Per i moduli senza piani di massa integrati, questa semplice aggiunta fa una differenza evidente nell'acquisizione e nel mantenimento dei satelliti.
Posizione di montaggio
Dove si posiziona il modulo GNSS è molto importante:
• Montaggio a stack: All'interno del telaio
- Vantaggi: Protezione dagli incidenti
- Svantaggi: Potenziali interferenze da parte dell'elettronica, visuale del cielo bloccata
- Migliori pratiche: Solo con moduli ad alta sensibilità, blocco in fibra di carbonio
Ho provato a montare i moduli GNSS all'interno del telaio, ma i risultati sono stati deludenti a causa del blocco del segnale da parte della piastra superiore. Consiglio questo approccio solo per build molto piccole in cui il montaggio superiore non è pratico e solo con moduli ad alta sensibilità.
• Piastra superiore: La posizione più comune
- Vantaggi: Vista chiara del cielo, lontano dalle interferenze del suolo
- Svantaggi: Esposizione ai danni da impatto
- Migliori pratiche: Al centro del drone se possibile

La maggior parte dei miei droni ha il modulo GNSS montato sulla piastra superiore, che fornisce la migliore vista del cielo. Di solito lo posiziono nella parte posteriore in un vassoio di estensione stampato in 3D per bilanciamento e per ridurre al minimo l'impatto dell'inclinazione del telaio durante il volo.
• Montaggio su asta: Elevato sopra il telaio
- Vantaggi: Eccellente vista del cielo, interferenze ridotte
- Svantaggi: Vulnerabilità agli impatti, peso aggiuntivo
- Migliori pratiche: Usare con custodia protettiva

Per i miei droni da mappatura dove le prestazioni GNSS sono fondamentali, uso supporti ad asta per sollevare l'antenna al di sopra di tutte le potenziali fonti di interferenza. La chiave è usare una custodia protettiva o un design che possa resistere agli impatti - ho perso alcune antenne imparando questa lezione!
Mitigazione delle interferenze
I segnali GNSS sono molto deboli e suscettibili alle interferenze - un fatto con cui ho acquisito una profonda familiarità attraverso la risoluzione dei problemi di scarsa ricezione:
• Fonti di interferenza:
- Sistemi di distribuzione dell'energia
- Trasmettitori video
- Rumore di motori e ESC
- Blocco della fibra di carbonio
- Altri sistemi radio
• Strategie di mitigazione:
- Mantenere la distanza dai cavi di alimentazione e dal VTX
- Utilizzare cavi schermati per il modulo GNSS
- Aggiungere nuclei in ferrite ai cavi di alimentazione
- Considerare materiale di schermatura RF
- Tenere le antenne lontane dalla fibra di carbonio
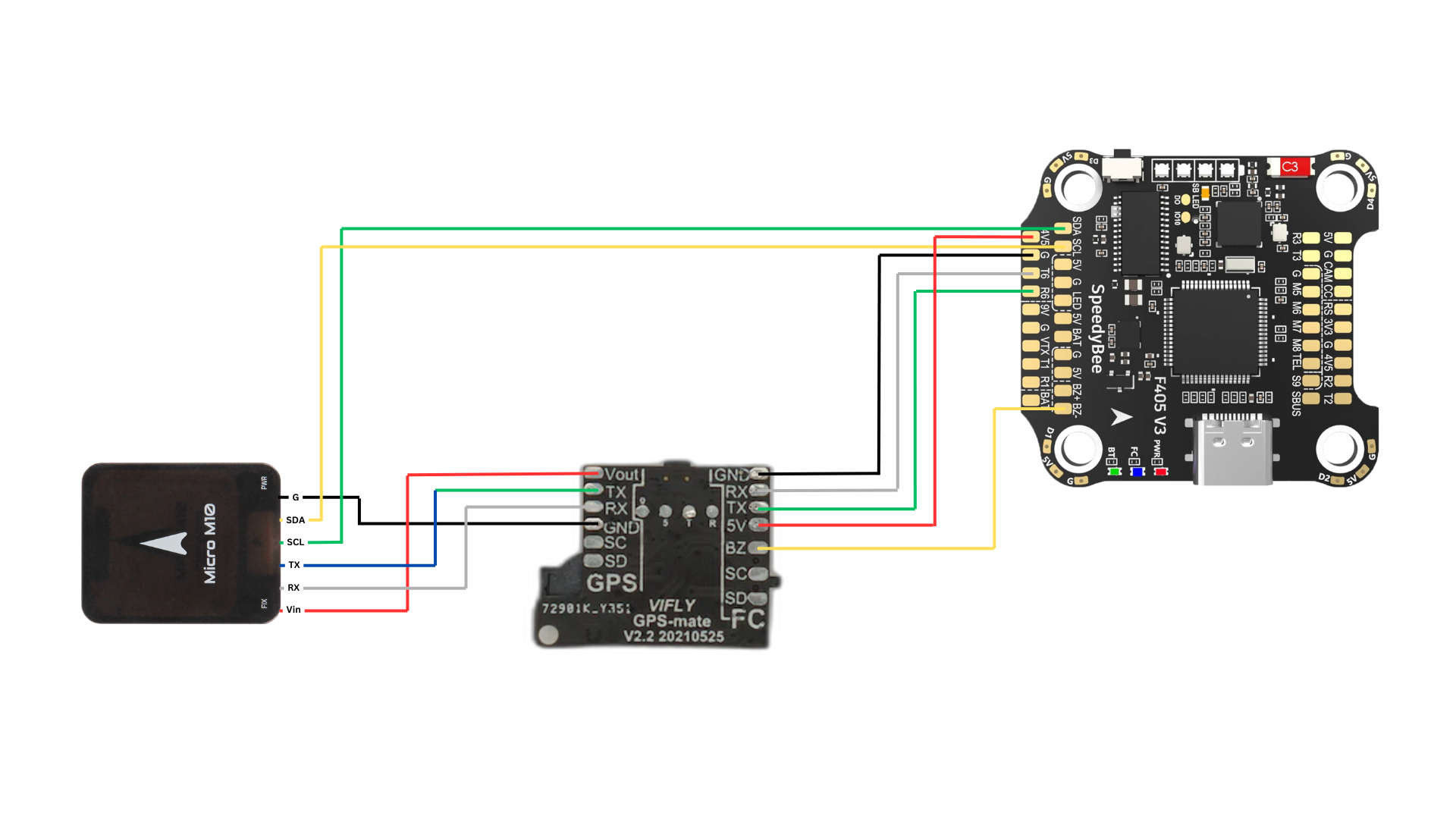
Una delle lezioni più importanti che ho imparato è l'importanza di tenere l'antenna GNSS lontana dai trasmettitori video. In una costruzione, ho avuto persistenti problemi di ricezione fino a quando non mi sono reso conto che l'antenna VTX era a soli 3 cm dall'antenna GPS. Spostandola all'estremità opposta del telaio ha risolto immediatamente il problema.
Sfortunatamente, nella maggior parte delle mie costruzioni lo spazio diventa un problema e non ho sempre la possibilità di posizionare il modulo GPS completamente isolato da altre antenne. In questi casi, prodotti come GPS-mate sono dei veri salvavita.

Per le costruzioni con piastre superiori in fibra di carbonio, uso sempre un distanziale non conduttivo per sollevare il modulo GNSS almeno 10-15 mm sopra la fibra di carbonio. Questo semplice cambiamento può migliorare notevolmente la ricezione impedendo alla fibra di carbonio di bloccare i segnali satellitari.
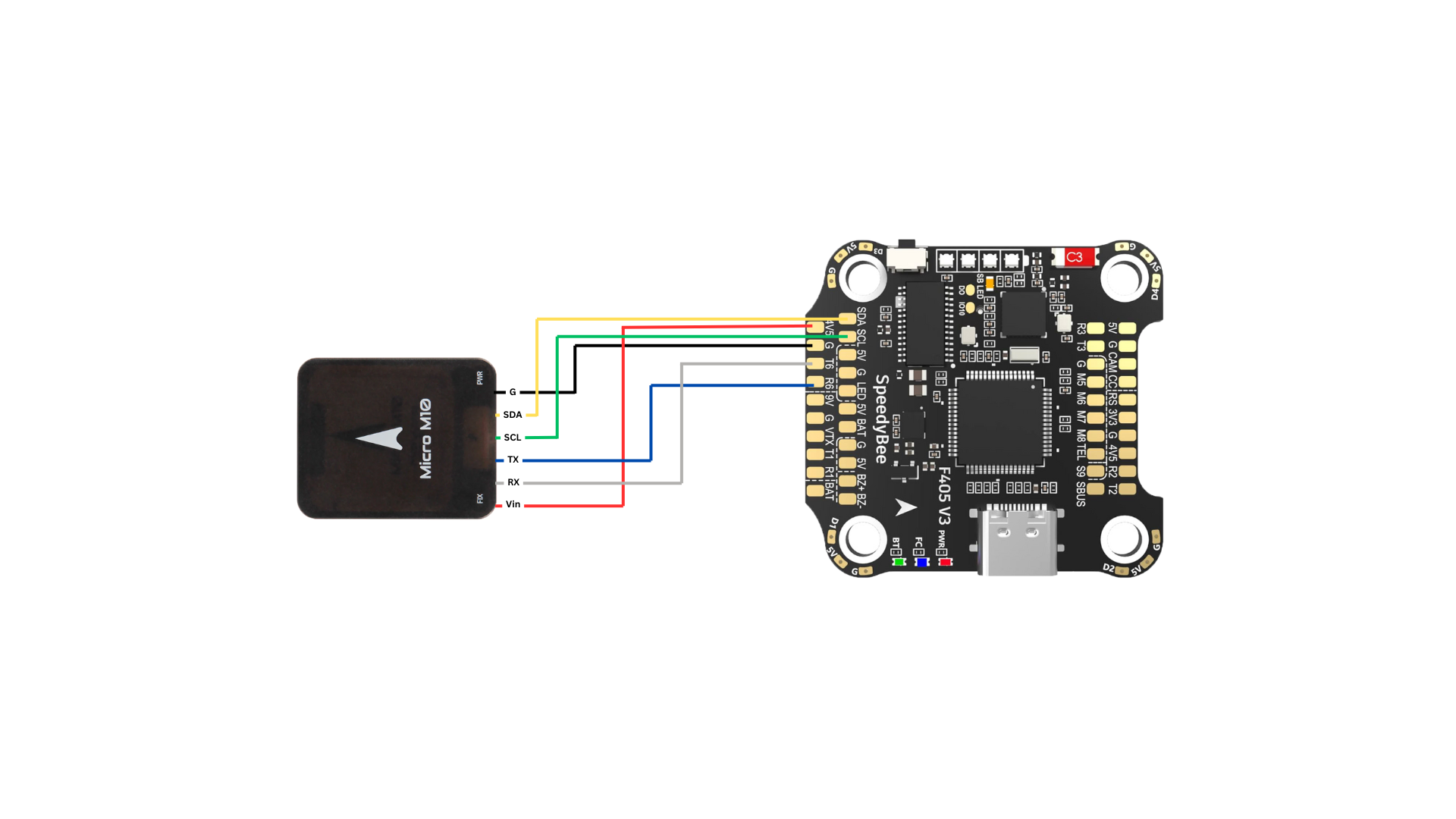
Cablaggio
Configurazione del software
Impostazioni del firmware
Il firmware moderno del controller di volo offre varie opzioni di configurazione GNSS. Ecco cosa ho scoperto funzionare meglio in diversi sistemi:
Impostazioni GNSS di INAV
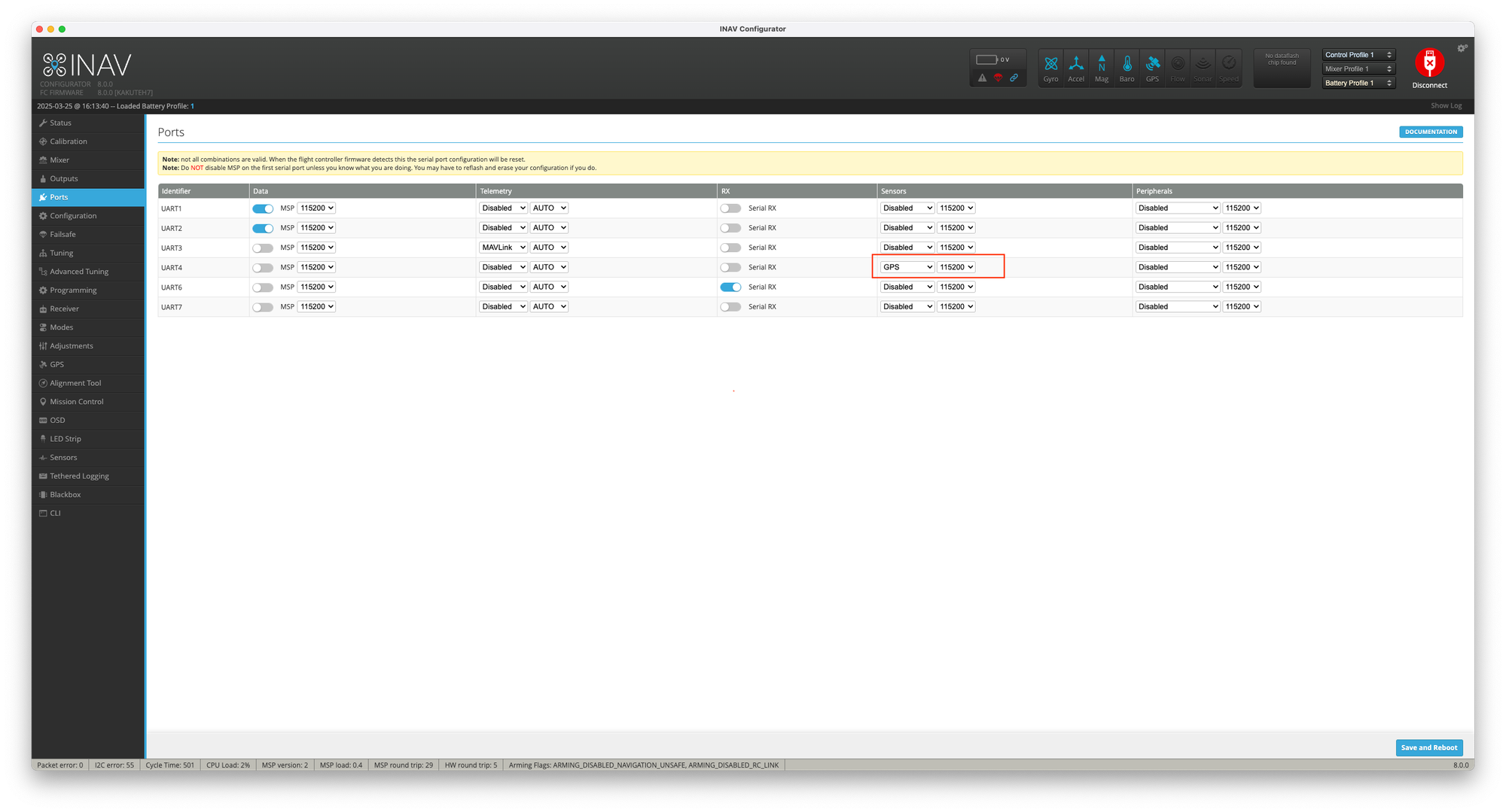
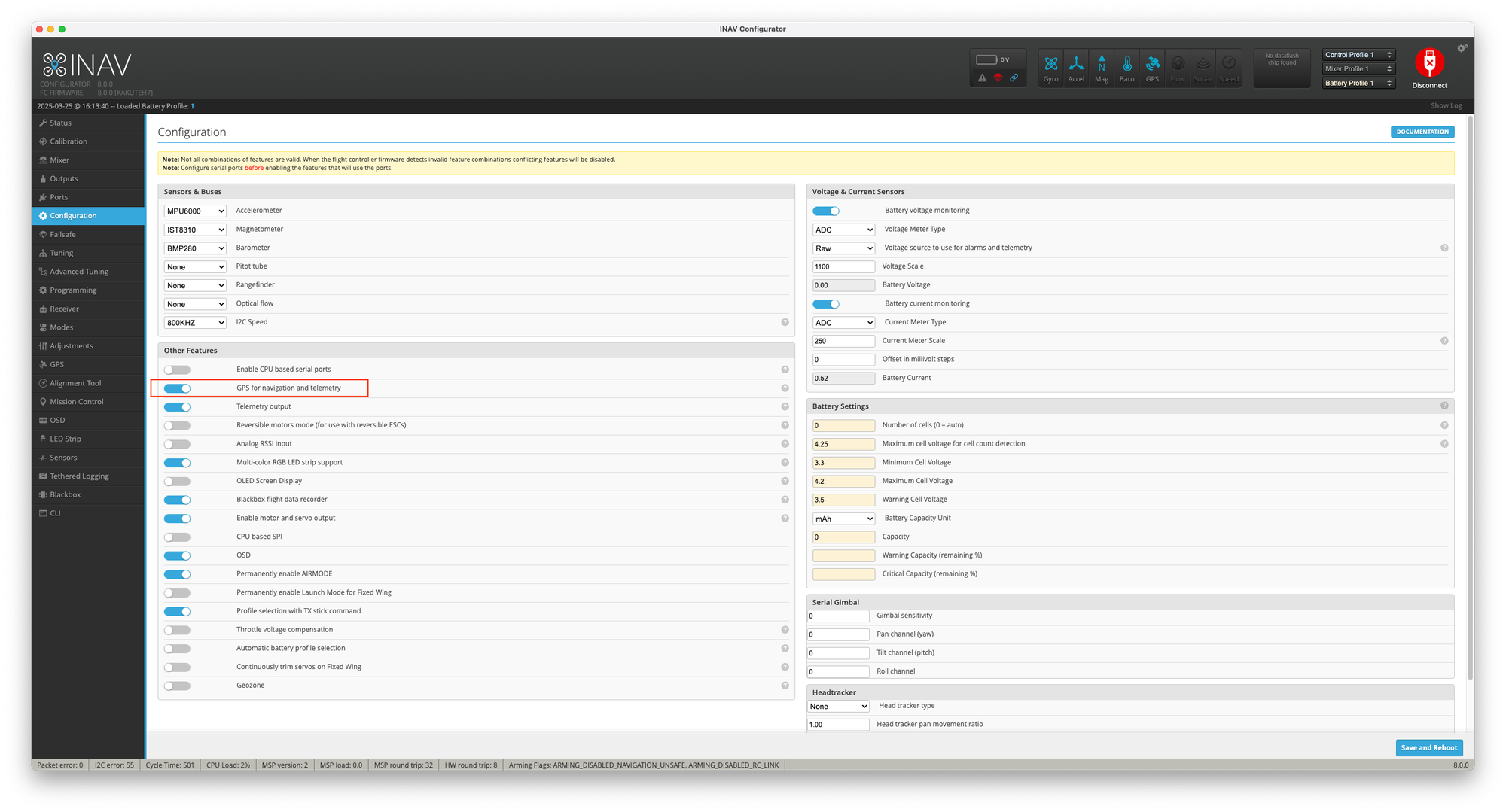
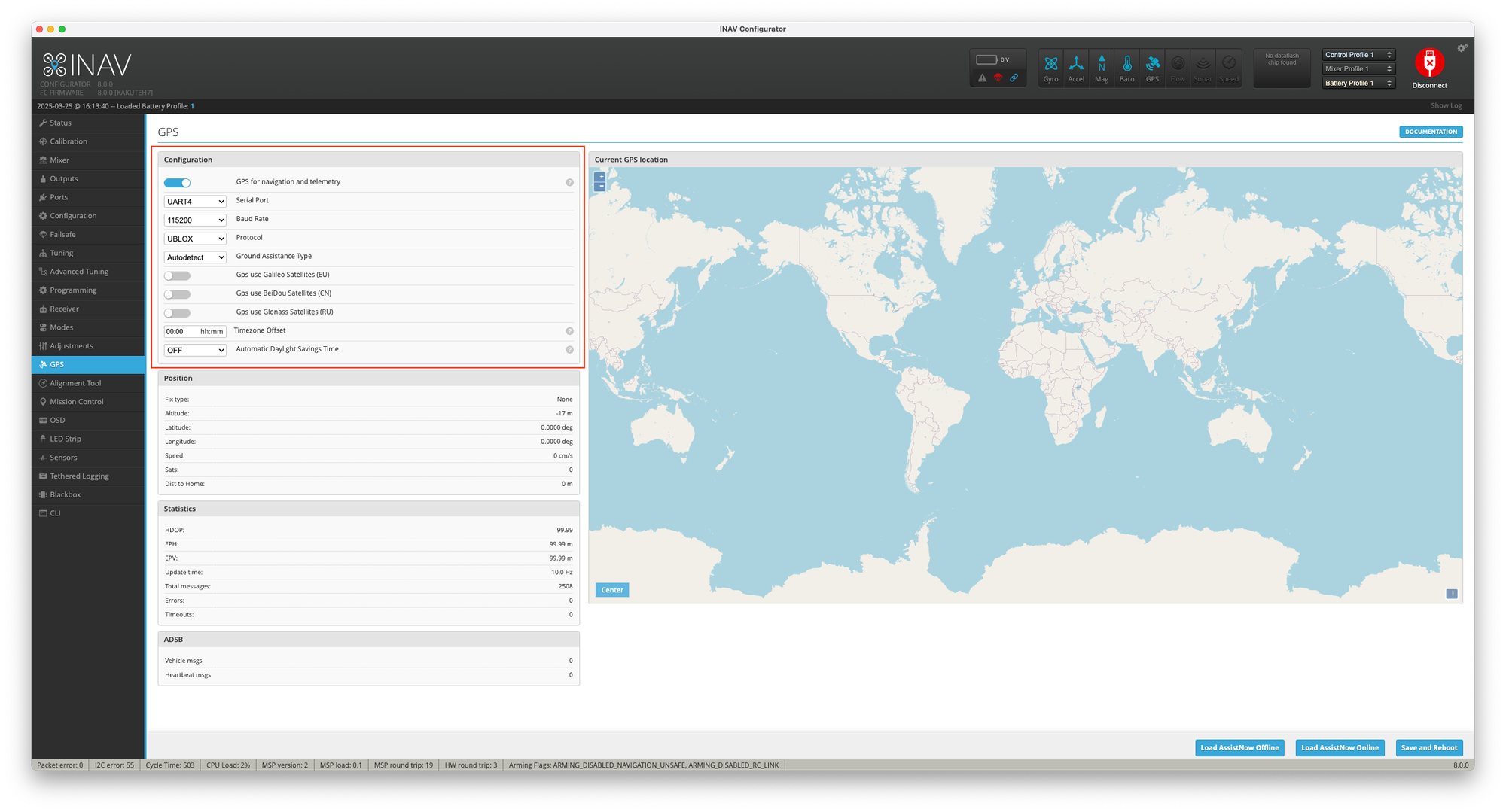
Ho scoperto che combinare i dati GNSS con quelli del barometro fornisce il mantenimento dell'altitudine più stabile. L'aggiunta del magnetometro (UBLOX+BARO+MAG) può migliorare la stima della posizione in alcuni casi, ma è più suscettibile alle interferenze. Sta diventando una tendenza allontanarsi dai magnetometri man mano che la precisione del posizionamento GPS evolve.
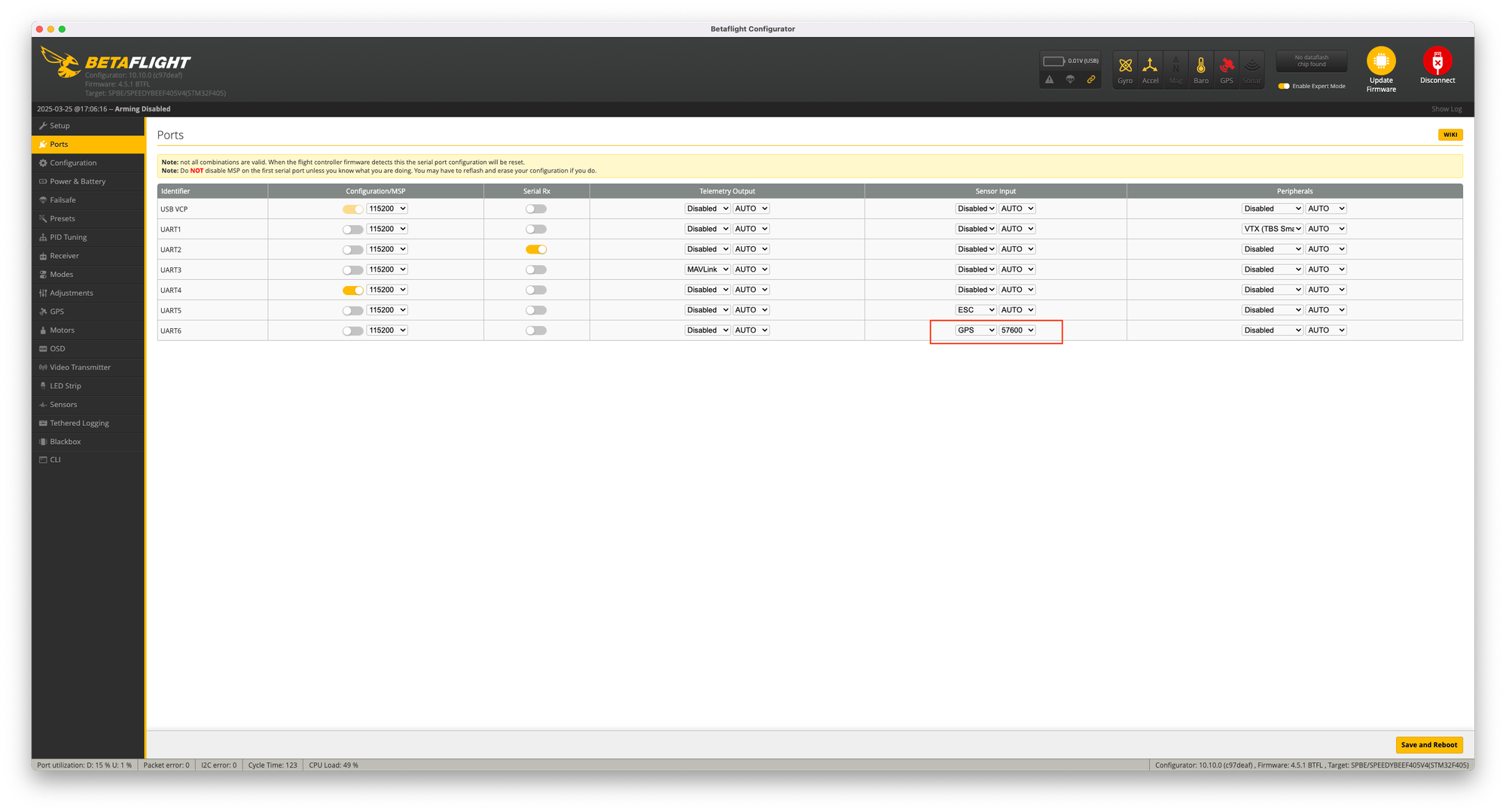
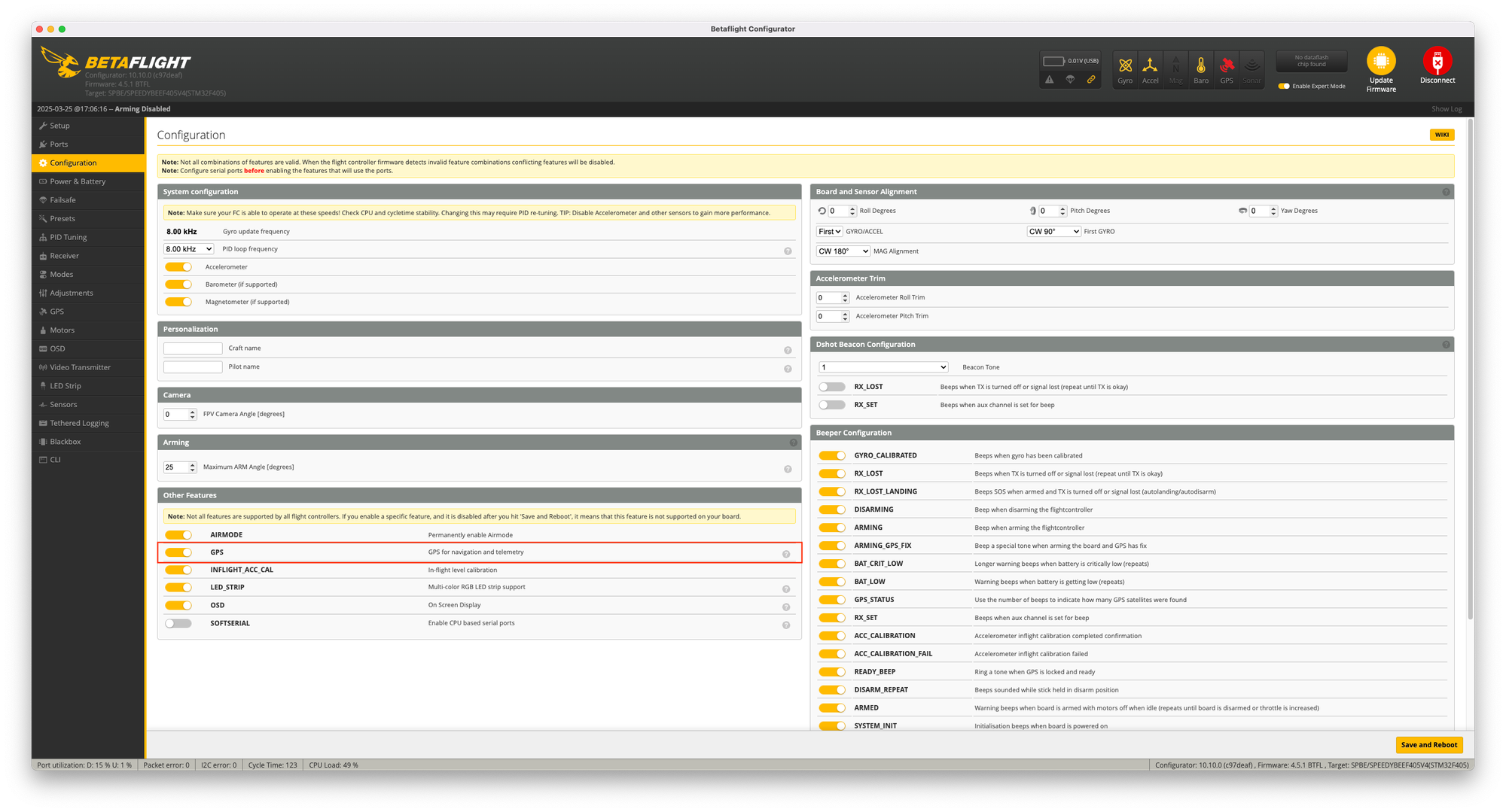
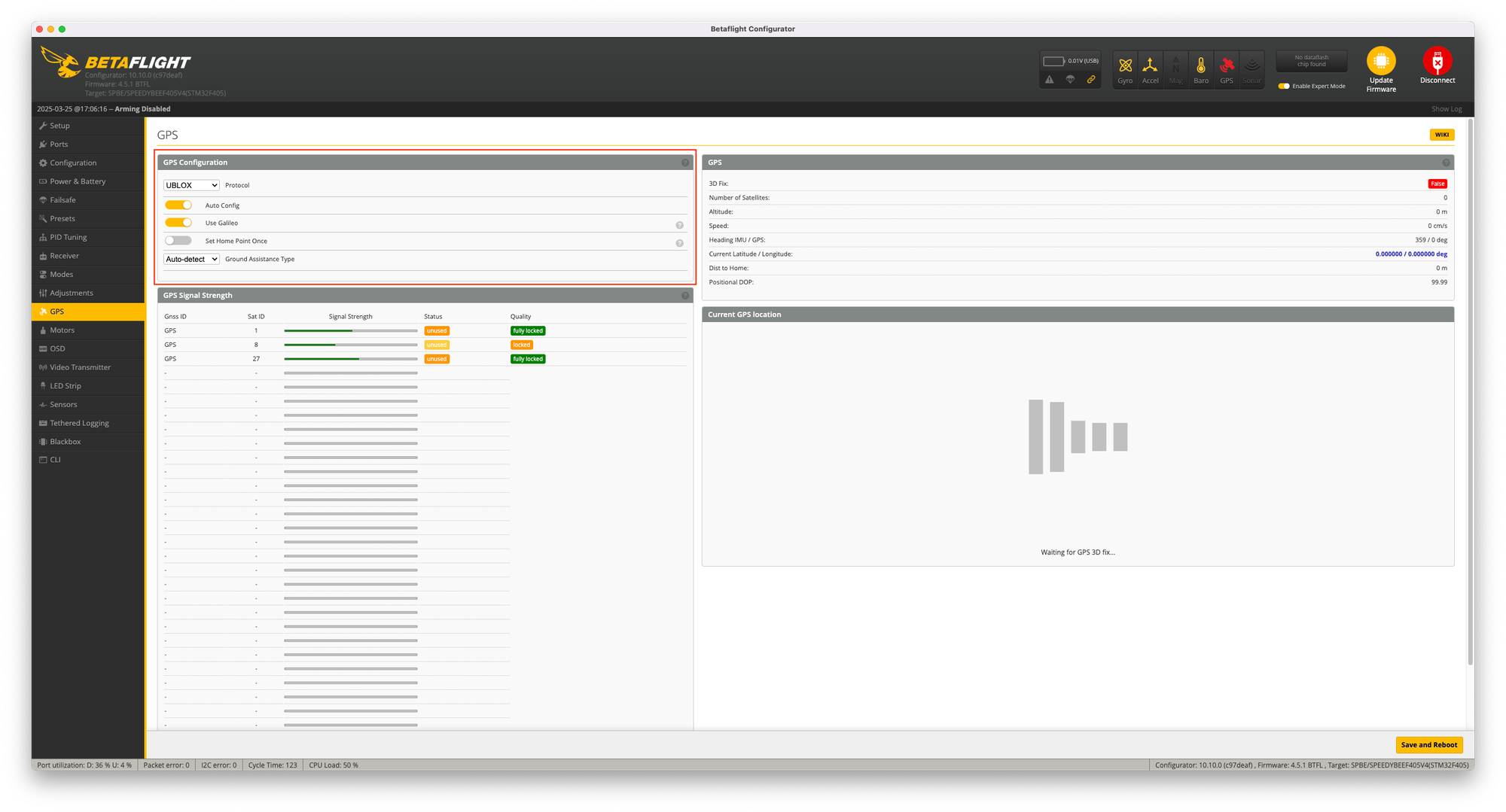
Impostazioni GPS di Betaflight
Per le mie build freestyle e racing con capacità di salvataggio GPS, utilizzo la seguente configurazione predefinita:
Argomenti avanzati sul GNSS
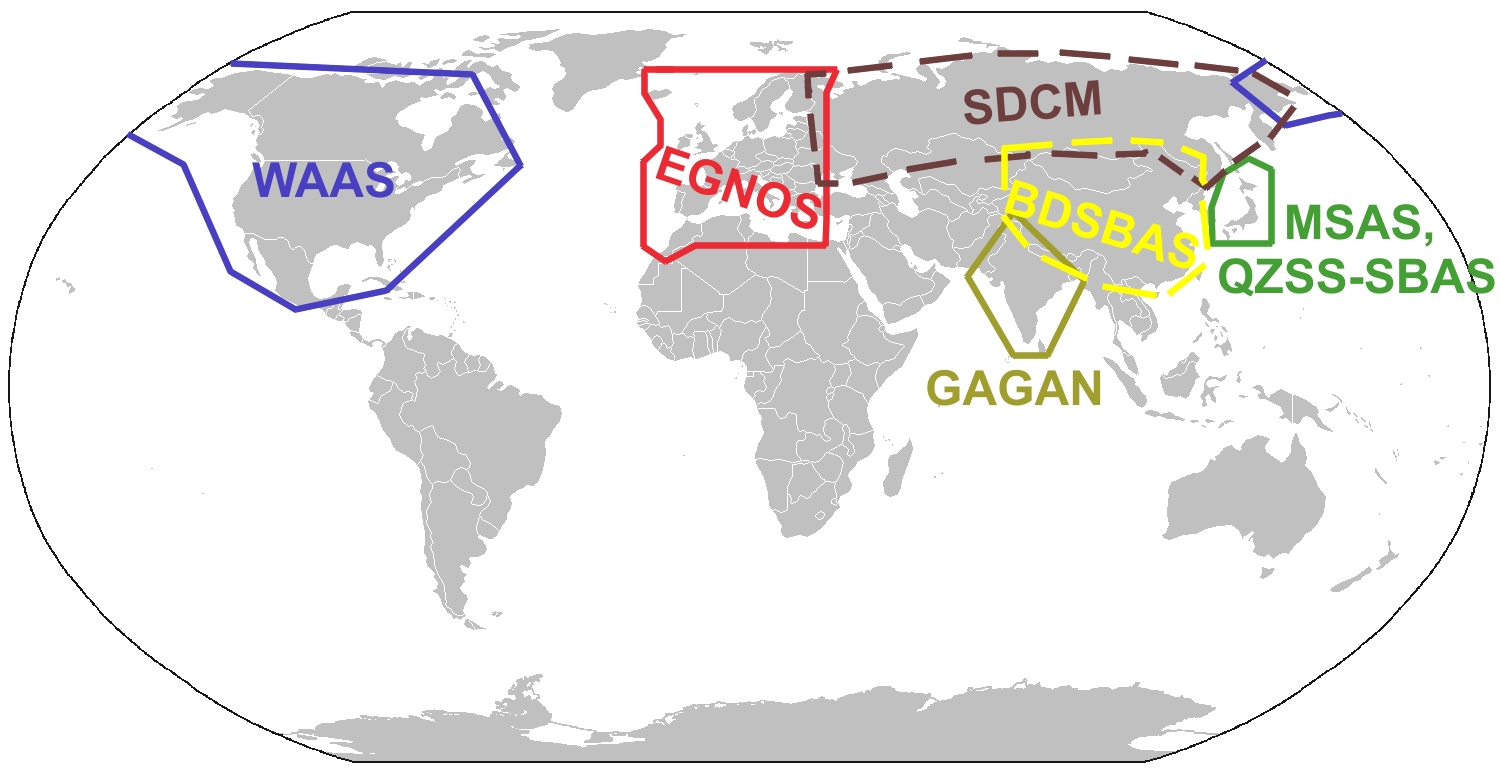
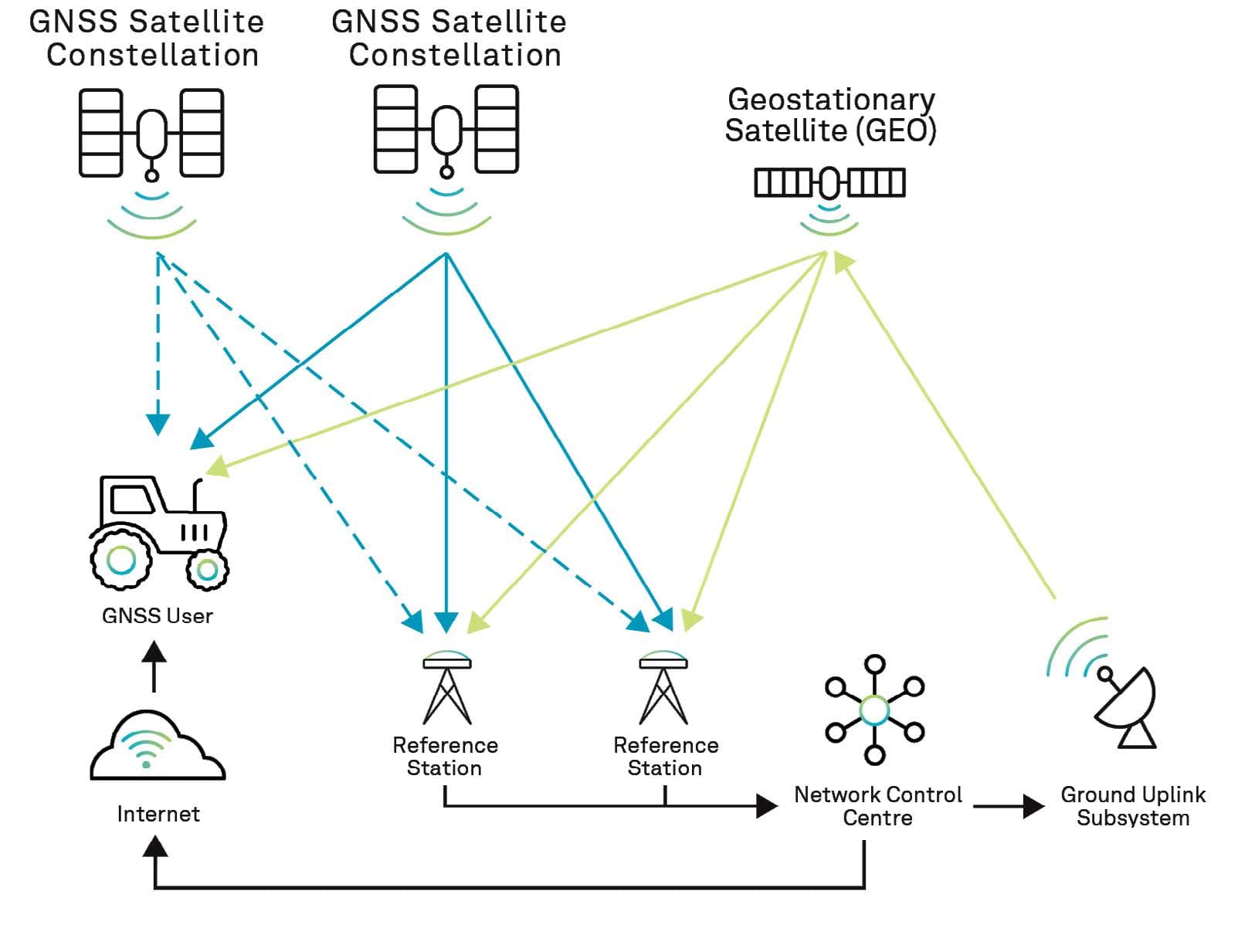
SBAS (Satellite-Based Augmentation System)
I sistemi regionali che migliorano la precisione del GNSS sono stati un notevole vantaggio nella mia esperienza:
• WAAS (Wide Area Augmentation System): Nord America
• EGNOS (European Geostationary Navigation Overlay Service): Europa
• MSAS (Multi-functional Satellite Augmentation System): Giappone
• GAGAN (GPS Aided GEO Augmented Navigation): India
• SDCM (System for Differential Corrections and Monitoring): Russia
Questi sistemi forniscono dati di correzione che possono migliorare la precisione da 3-5m a 1-2m. Ho notato i benefici più chiaramente quando volavo in Europa con EGNOS e in Nord America con WAAS. Le correzioni sono particolarmente preziose per la precisione dell'altitudine, che è tipicamente la dimensione più debole nel posizionamento GNSS.
Oltre ai miglioramenti della precisione, i sistemi SBAS forniscono anche il monitoraggio dell'integrità, che aiuta a identificare i segnali satellitari inaffidabili. Questo è prezioso per le applicazioni critiche per la sicurezza in cui sapere quando non fidarsi dei dati di posizione è importante quanto avere dati accurati.
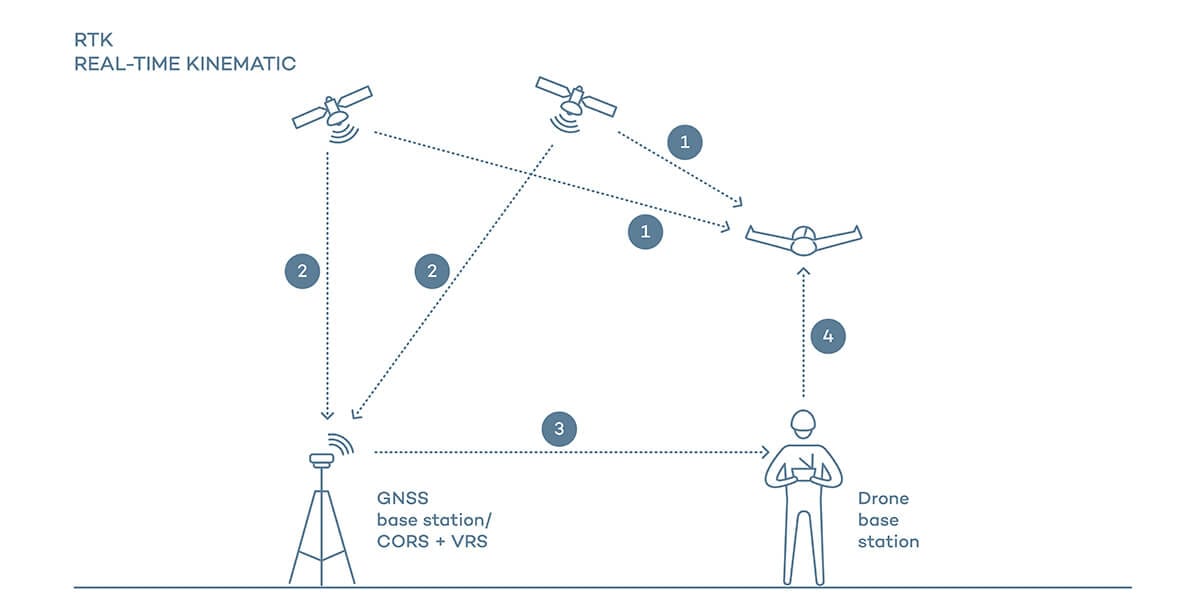
RTK (Real-Time Kinematics)
Per i miei droni di mappatura e rilevamento, l'RTK è stato trasformativo:
Principio di base: Misurazioni della fase della portante per una precisione centimetrica
Componenti:
- Stazione di base: Riferimento di posizione fissa
- Rover: Ricevitore mobile sul drone
- Collegamento di correzione: Connessione radio o di rete
Precisione: In genere 1-3cm in condizioni ideali
L'impostazione dell'RTK richiede più componenti e complessità, ma i risultati valgono la pena per le applicazioni di precisione. Utilizzo una connessione 4G/LTE per ricevere le correzioni NTRIP da servizi pubblici, il che elimina la necessità di una stazione base locale.
Le principali limitazioni che ho riscontrato con l'RTK sono:
- Richiede una chiara visione del cielo
- Stazione base entro ~10km (anche se l'RTK di rete estende questo)
- Collegamento dati di correzione affidabile
- Periodo di inizializzazione richiesto
Per la maggior parte dei voli ricreativi, l'RTK è eccessivo. Ma per la mappatura, il rilevamento, l'agricoltura di precisione e l'atterraggio automatizzato, è inestimabile. La capacità di tornare ripetutamente nella stessa posizione esatta con una precisione centimetrica apre molte applicazioni professionali.
PPP (Posizionamento Preciso di Punto)
Per alcuni dei miei voli di esplorazione remota dove l'RTK non è pratico:
• Principio di base: Utilizza dati precisi sull'orbita e l'orologio dei satelliti
• Vantaggio: Nessuna stazione base richiesta
• Svantaggio: Tempo di convergenza più lungo (da minuti a ore)
• Precisione: Livello decimetrico (10-30cm)
Il PPP è meno comune nelle applicazioni dei droni a causa dei requisiti di tempo di convergenza, ma è una tecnica preziosa per alcune applicazioni specializzate. L'ho usato per missioni di mappatura di lunga durata in cui il drone ha il tempo di raggiungere la convergenza prima di iniziare il modello di mappatura.
Ricezione Multi-Banda
I più recenti moduli di fascia alta come lo ZED-F9P utilizzano più bande di frequenza:
• Singola Frequenza: La maggior parte dei GNSS per droni (L1/E1/B1)
• Doppia Frequenza: Moduli di fascia alta (L1+L5/E5/B2)
• Vantaggi:
- Migliore mitigazione del multipath
- Inizializzazione RTK più veloce
- Precisione migliorata
- Migliori prestazioni in ambienti impegnativi
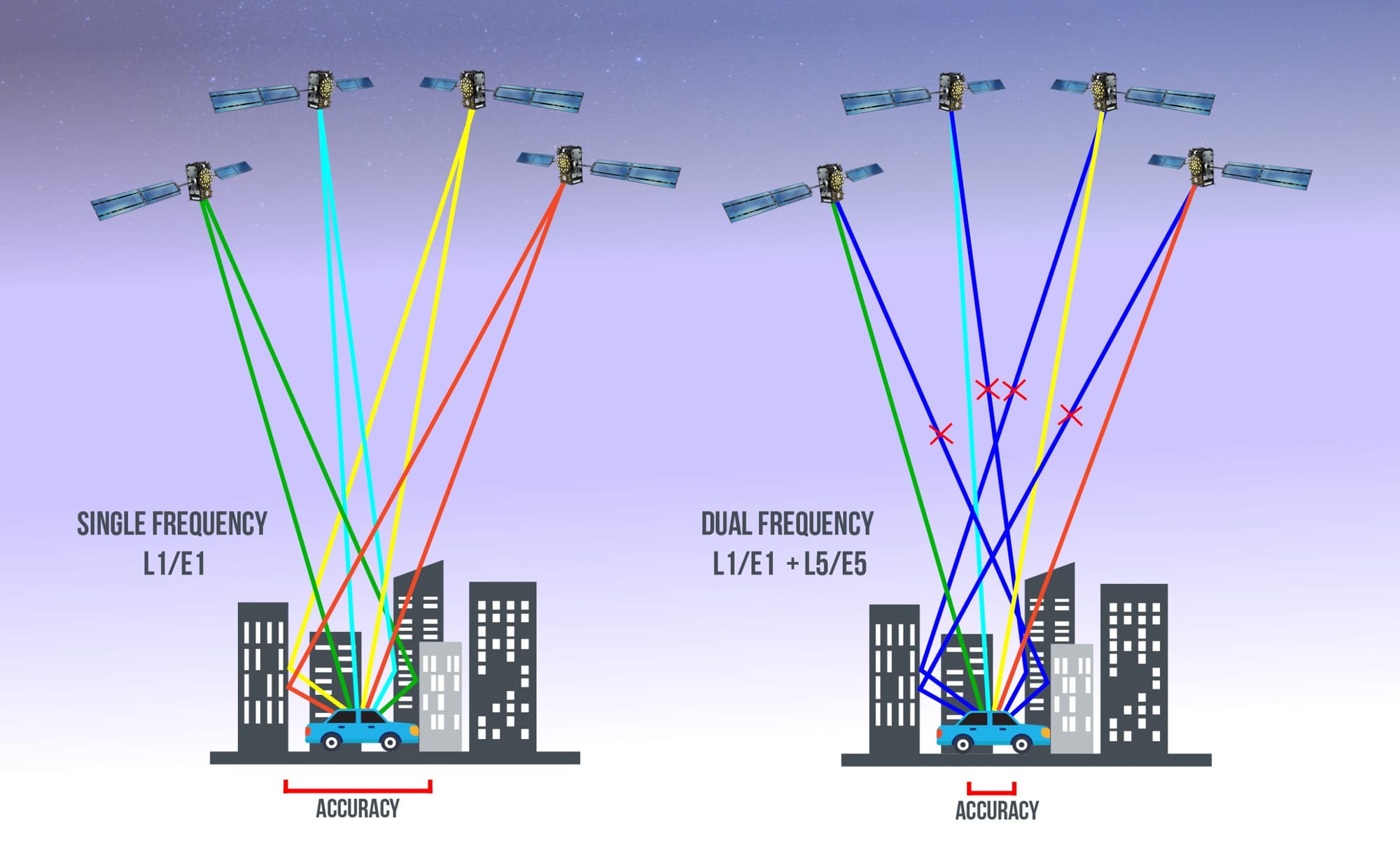
La differenza è evidente: il mio drone di rilevamento equipaggiato con F9P raggiunge il fix RTK molto più velocemente rispetto ai vecchi sistemi RTK a singola frequenza che ho usato. La mitigazione del multipath è particolarmente preziosa in ambienti con superfici riflettenti come acqua o edifici.
Risoluzione dei problemi GNSS
Nel corso degli anni, ho incontrato e risolto innumerevoli problemi GNSS. Ecco i problemi più comuni e le loro soluzioni:
Scarsa ricezione satellitare
Sintomi:
- Pochi satelliti acquisiti
- Valori HDOP elevati
- Dati di posizione incoerenti
- Perdita frequente del GNSS
Soluzioni:
- Migliorare il posizionamento dell'antenna: ho visto miglioramenti drastici semplicemente spostando l'antenna di pochi centimetri dalle fonti di interferenza.
- Allontanarsi dalle fonti di interferenza, in particolare dai trasmettitori video e dai cavi di alimentazione.
- Utilizzare un modulo multi-costellazione: più satelliti significa più possibilità di una buona ricezione.
- Controllare la presenza di ostruzioni fisiche: la fibra di carbonio è particolarmente problematica.
- Verificare la connessione dell'antenna: le connessioni allentate possono causare problemi intermittenti.
Una volta ho passato ore a risolvere problemi di scarsa ricezione su una nuova build, solo per scoprire che la piastra superiore in fibra di carbonio bloccava i segnali. L'aggiunta di un distanziatore di 15 mm per sollevare il modulo ha risolto il problema all'istante.
Acquisizione lenta dei satelliti
Sintomi:
- Lungo tempo per il primo fix
- Blocco GPS ritardato prima del volo
Soluzioni:
- Aggiornare a un modulo più recente: ogni generazione ha tempi di acquisizione migliorati.
- Abilitare tutte le costellazioni disponibili: più satelliti significa un'acquisizione più rapida.
- Impostare il modello dinamico appropriato: l'uso di "Pedone" per un drone può rallentare l'acquisizione.
- Assicurarsi che la tensione della batteria sia stabile: i cali di tensione possono resettare il processo di acquisizione.
- Considerare un'antenna esterna per ambienti impegnativi: a volte l'antenna integrata non è sufficiente.
Ho scoperto che mantenere il ricevitore alimentato tra un volo e l'altro (usando una piccola batteria) può ridurre drasticamente il tempo di acquisizione mantenendo i dati dell'effemeride.
Deriva di posizione
Sintomi:
- Il mantenimento della posizione si sposta gradualmente
- L'RTH atterra lontano dal punto di decollo
- I waypoint non vengono seguiti accuratamente
Soluzioni:
- Attendere una migliore copertura satellitare (HDOP inferiore) – Aspetto sempre un HDOP < 2.0 prima di fidarmi dei dati sulla posizione.
- Aumentare il requisito minimo di satelliti – più satelliti generalmente significa una migliore precisione.
- Abilitare SBAS se disponibile – le correzioni possono ridurre significativamente la deriva.
- Verificare la presenza di interferenze magnetiche che influenzano la bussola – i problemi della bussola spesso si mascherano da problemi GNSS.
- Considerare i fattori ambientali (alberi, edifici) – le riflessioni multipath possono causare errori di posizione.
In una missione di mappatura, ho notato che il drone si allontanava gradualmente dalla rotta. Il problema si è rivelato essere una bussola mal calibrata influenzata dai motori. La ricalibrazione della bussola lontano da oggetti metallici ha risolto il problema.
Glitch GNSS
Sintomi:
- Improvvisi salti di posizione
- Comportamento di navigazione irregolare
- Perdita temporanea della posizione
Soluzioni:
- Regolare i parametri di filtraggio GNSS – la maggior parte del firmware ha impostazioni per levigare i dati GNSS.
- Aumentare la fluidità della navigazione – questo può filtrare i glitch momentanei.
- Verificare la presenza di interferenze elettriche intermittenti – gli alimentatori switching sono colpevoli comuni.
- Aggiornare all'ultimo firmware – molti problemi GNSS vengono risolti negli aggiornamenti del firmware.
- Considerare l'aggiornamento hardware a una generazione più recente – i ricevitori più recenti hanno una migliore reiezione dei segnali spuri.
Ho scoperto che l'aggiunta di un condensatore all'ingresso di alimentazione del modulo GNSS può aiutare a ridurre i glitch causati dal rumore elettrico del sistema di alimentazione.
Strumenti diagnostici
U-Center (software di configurazione Ublox)
Questo è il mio strumento preferito per diagnosticare i problemi GNSS:
• Scopo: Configurare e monitorare i ricevitori GNSS Ublox
• Caratteristiche:
- Tracciamento satellitare in tempo reale
- Monitoraggio della qualità del segnale
- Regolazione dei parametri di configurazione
- Aggiornamenti del firmware
- Analisi delle prestazioni
Mi connetto tramite USB o passthrough UART dal flight controller. La vista della potenza del segnale satellitare è particolarmente utile per identificare problemi di interferenza – vedrai tutti i satelliti con potenza del segnale ridotta piuttosto che solo alcuni specifici.
https://www.u-blox.com/en/product/u-center-it/
Visualizzatori GNSS
Integrati nella maggior parte dei software per flight controller:
• Scopo: Visualizzare le prestazioni GNSS
• Esempi:
- Stato GPS di Mission Planner
- Schermata di configurazione GPS di INAV
- Scheda GPS di Betaflight
Controllo sempre questi prima dei voli per verificare una buona ricezione. Le metriche chiave che monitoro sono:
- Conteggio satelliti (più è meglio, mi piace vedere 14+ per missioni critiche)
- Valore HDOP (più basso è meglio, punto a < 1.5)
- Tipo di fix (3D è richiesto per la navigazione, RTK float/fixed per applicazioni di precisione)
- Potenza del segnale (indica la qualità della ricezione e potenziali interferenze)
Analisi Blackbox
Per la diagnosi post-volo:
• Scopo: Rivedere le prestazioni GNSS durante il volo
• Strumenti:
- Blackbox Explorer
- Flight Review (ArduPilot)
Ho identificato molti problemi sottili attraverso l'analisi della blackbox che non erano evidenti durante il volo. I dati chiave da esaminare includono:
- Precisione della posizione nel tempo
- Deriva del punto home
- Prestazioni di navigazione
- Qualità del segnale GNSS
Confrontare i dati GNSS con altri sensori (come gli accelerometri) può rivelare problemi di integrazione che influenzano le prestazioni di navigazione.
Tendenze future nella tecnologia GNSS
Sulla base della mia esperienza con i moduli più recenti e gli sviluppi del settore, ecco dove vedo la tecnologia GNSS diretta:
Progressi hardware
• Standard multi-banda: La doppia frequenza sta diventando più comune nei dispositivi consumer. Mi aspetto che raggiunga i droni hobbistici entro 2-3 anni, portando una migliore precisione e affidabilità.
• Miniaturizzazione: Moduli più piccoli e leggeri con prestazioni migliori. La tendenza verso l'integrazione continuerà, con GNSS, bussola, barometro e persino IMU in pacchetti singoli.
• Integrazione: GNSS, bussola, barometro e radio combinati. Lo sto già vedendo in alcuni moduli di fascia alta e semplifica il cablaggio e riduce il peso.
• Efficienza energetica: Durata della batteria estesa per missioni a lungo raggio. La modalità Super-E dell'M10 è solo l'inizio – i moduli futuri probabilmente ridurranno ulteriormente il consumo energetico.
• Tecnologia dell'antenna: Ricezione migliorata in pacchetti più piccoli. Il design dell'antenna continua a progredire, con prestazioni migliori da fattori di forma più piccoli.
Innovazioni software
• Algoritmi migliorati: Migliore stima e filtraggio della posizione. Gli approcci di apprendimento automatico stanno iniziando ad apparire nei sistemi commerciali e alla fine raggiungeranno i droni hobbistici.
• Posizionamento migliorato dall'IA: Apprendimento automatico per ambienti impegnativi. Ho visto ricerche iniziali che utilizzano reti neurali per migliorare il posizionamento nei canyon urbani.
• Fusione dei sensori: Integrazione più stretta con altri sensori di navigazione. Le linee tra GNSS, posizionamento visivo e navigazione inerziale continueranno a sfumare.
• Monitoraggio dell'integrità: Migliore rilevamento di segnali inaffidabili. Man mano che i droni diventano più autonomi, sapere quando non fidarsi dei dati GNSS diventa sempre più importante.
• Configurazione semplificata: Configurazione più intuitiva. La complessità della configurazione GNSS è stata una barriera per molti utenti, ma i sistemi più recenti stanno diventando più plug-and-play.
Tecnologie emergenti
• Navigazione satellitare LEO: Costellazioni in orbita terrestre bassa per una migliore precisione. Sistemi come Starlink potrebbero potenzialmente offrire servizi di navigazione con prestazioni urbane migliori rispetto al GNSS tradizionale.
• Navigazione assistita dalla visione: Telecamere che migliorano il GNSS in ambienti impegnativi. Lo sto già usando su alcune build, dove i sensori di flusso ottico complementano il GNSS per un posizionamento più robusto.
• Sensori quantistici: Tecnologia di posizionamento di nuova generazione. Ancora nei laboratori di ricerca, ma i sensori quantistici promettono miglioramenti drastici nella precisione senza riferimenti esterni.
• Autenticazione avanzata: Protezione contro attacchi di spoofing. Man mano che lo spoofing GNSS diventa più comune, le funzionalità di autenticazione diventeranno più importanti per le applicazioni critiche.
• Posizionamento mesh: Droni che condividono dati di posizione in sciami. Ho sperimentato questo in configurazioni multi-drone, dove i droni possono utilizzare il posizionamento relativo per migliorare le loro stime di posizione assoluta.
FAQ: Domande comuni sulla tecnologia GNSS per droni
Qual è la differenza tra GPS, GNSS e GLONASS?
Questa è una delle domande più comuni che ricevo quando aiuto le persone con le loro build:
• GPS (Global Positioning System): Il sistema di navigazione satellitare americano gestito dalla US Space Force. È il sistema originale e più ampiamente utilizzato.
• GNSS (Global Navigation Satellite System): Il termine generale per tutti i sistemi di navigazione satellitare, inclusi GPS, GLONASS, Galileo, BeiDou e sistemi regionali. I ricevitori moderni in genere utilizzano più costellazioni GNSS contemporaneamente.
• GLONASS: Il sistema di navigazione satellitare della Russia, simile al GPS ma con diverse caratteristiche orbitali e struttura del segnale. È il secondo sistema globale più vecchio e fornisce una buona copertura alle alte latitudini.
Quando qualcuno si riferisce a un "modulo GPS" per un drone, in genere sta parlando di un ricevitore GNSS che può utilizzare più costellazioni satellitari, non solo il sistema GPS americano. Chiarisco sempre questo punto ai principianti per evitare confusione.
Vale la pena passare a un modulo GNSS di nuova generazione?
Sulla base della mia esperienza nell'aggiornamento di numerosi droni:
• Da M6/M7 a M8: Miglioramento significativo nei tempi di acquisizione, supporto delle costellazioni e precisione. Vale decisamente la pena aggiornare.
• Da M8 a M9: Miglioramenti evidenti nella precisione, frequenza di aggiornamento e prestazioni multi-costellazione. Vale la pena aggiornare per un uso di navigazione serio.
• Da M9 a M10: Miglioramenti incrementali nella sensibilità, consumo energetico e prestazioni urbane. Vale la pena considerare per applicazioni specializzate o se l'efficienza energetica è fondamentale.
Per la maggior parte dei piloti hobbisti, un modulo M8N è ancora adeguato per la navigazione di base, mentre un M9N offre prestazioni eccellenti per applicazioni più esigenti. La serie M10 o F9P sono principalmente vantaggiosi per usi professionali o specializzati.
Ho aggiornato il mio drone da esplorazione a lungo raggio da M8N a M9N e ho notato immediati miglioramenti nei tempi di acquisizione e nella stabilità della posizione. Per i miei quad freestyle che usano il GPS solo per il ritorno a casa, ho mantenuto i moduli M8N in quanto sono perfettamente adeguati per quello scopo.
Quanti satelliti servono per una navigazione affidabile?
Dalla mia esperienza con decine di droni dotati di GNSS:
• Minimo funzionale: 5-6 satelliti
• Minimo consigliato: 8 satelliti
• Buone prestazioni: 10-14 satelliti
• Prestazioni eccellenti: 15+ satelliti
Tuttavia, il conteggio dei satelliti è solo una parte dell'equazione. L'HDOP (Horizontal Dilution of Precision) è altrettanto importante: un valore HDOP inferiore (idealmente sotto 2.0) indica una migliore geometria satellitare e un posizionamento più accurato.
Ho avuto situazioni con 20+ satelliti ma HDOP scadente a causa di tutti i satelliti raggruppati in una parte del cielo, con conseguente posizionamento mediocre. Al contrario, ho avuto prestazioni eccellenti con solo 9 satelliti ben distribuiti nel cielo, dando un basso HDOP.
I moderni ricevitori multi-costellazione possono spesso vedere 20+ satelliti in condizioni di cielo aperto, fornendo un'eccellente ridondanza e precisione.
L'uso di più costellazioni scarica la batteria più velocemente?
Una domanda che ricevo spesso dai piloti preoccupati per il tempo di volo:
L'uso di più costellazioni GNSS aumenta leggermente il consumo energetico, ma l'impatto è relativamente piccolo:
• Solo GPS: Consumo energetico di base
• GPS+GLONASS: ~10-15% in più di potenza rispetto al solo GPS
• GPS+GLONASS+Galileo+BeiDou: ~20-30% in più di potenza rispetto al solo GPS
Per fare un esempio, un tipico modulo M8N assorbe circa 25mA, mentre una configurazione multi-costellazione completa potrebbe assorbire 30-35mA. Su un drone con un assorbimento di corrente di 5-20A durante il volo, questa differenza è trascurabile (meno dello 0,5% del consumo totale di energia).
Ho misurato la differenza sui miei setup a lungo raggio e l'impatto sul tempo di volo è impercettibile. I vantaggi di una migliore precisione, acquisizione più rapida e maggiore affidabilità superano quasi sempre l'impatto energetico minimo.
Quale costellazione GNSS è la più precisa?
Sulla base dei miei test in diverse regioni:
• GPS: Generalmente precisione di 3-5m, molto coerente e affidabile
• GLONASS: In genere precisione di 4-7m, migliore alle alte latitudini
• Galileo: Precisione di 1-3m, progettato per la precisione civile
• BeiDou: 3-5m a livello globale, 2-3m nella regione Asia-Pacifico
Tuttavia, le migliori prestazioni derivano dall'uso combinato di più costellazioni, poiché si completano a vicenda nei punti di forza e di debolezza. Un ricevitore moderno che utilizza tutte le costellazioni disponibili in genere raggiunge una precisione di 1-3m in buone condizioni, migliore di qualsiasi singola costellazione da sola.
Nella mia esperienza, Galileo offre attualmente la migliore precisione civile tra i sistemi globali, ma il suo vantaggio è più evidente quando combinato con altre costellazioni.
Posso usare l'RTK su un drone normale?
Sì, l'RTK può essere implementato su droni normali con alcune considerazioni:
Requisiti:
- Modulo GNSS con capacità RTK (come ZED-F9P)
- Flight controller con supporto RTK (ArduPilot, INAV con limitazioni)
- Stazione base o servizio NTRIP per le correzioni
- Collegamento dati per la trasmissione delle correzioni (radio telemetria, 4G/LTE)
Considerazioni pratiche:
- Costo aggiuntivo ($150-300 per hardware RTK)
- Maggiore complessità nella configurazione
- Necessità di una fonte di dati di correzione
- Beneficio limitato per il volo FPV standard
Ho implementato l'RTK su diverse build e, sebbene la precisione a livello centimetrico sia impressionante, è generalmente non necessaria per il volo ricreativo, le gare o il freestyle. Dove l'RTK ha senso è per applicazioni di mappatura, rilevamento, agricoltura di precisione e atterraggio automatizzato.
Per il mio drone da rilevamento, uso un modulo ZED-F9P con una connessione 4G per ricevere le correzioni NTRIP da un servizio pubblico. La configurazione è stata più complessa di un'implementazione GNSS standard, ma i risultati valgono la pena per applicazioni professionali.
Come influiscono i fattori ambientali sulle prestazioni GNSS?
Vari fattori ambientali possono avere un impatto significativo sulla ricezione GNSS:
• Canyon urbani: Gli edifici bloccano e riflettono i segnali, riducendo la precisione di 5-10 volte. Ho visto errori di posizione di oltre 20 metri in ambienti urbani densi con ricevitori a singola costellazione.
• Fogliame denso: Gli alberi possono attenuare i segnali di 10-30dB, riducendo la visibilità dei satelliti. Ho scoperto che volare al di sopra della chioma degli alberi è spesso necessario per una navigazione affidabile nelle aree boschive.
• Specchi d'acqua: I riflessi possono causare errori di percorso multiplo. Durante la mappatura delle coste, ho notato salti di posizione vicino al bordo dell'acqua a causa dei riflessi del segnale.
• Meteo: La pioggia forte può degradare leggermente i segnali (attenuazione di 1-2dB). Nella mia esperienza, questo raramente causa problemi di prestazioni evidenti.
• Condizioni ionosferiche: L'attività solare può influenzare la precisione. Durante le tempeste solari, ho osservato prestazioni leggermente degradate, anche se i ricevitori moderni gestiscono bene questo aspetto.
• Fonti di disturbo: Le interferenze RF nelle vicinanze possono bloccare la ricezione. Una volta un mio drone si è rifiutato di ottenere un blocco di posizione finché non mi sono reso conto che il mio sistema di microfono wireless stava causando interferenze.
I ricevitori multi-costellazione aiutano a mitigare questi problemi fornendo più satelliti e frequenze con cui lavorare, ma nessun sistema GNSS è completamente immune alle sfide ambientali. Per applicazioni critiche in ambienti impegnativi, considero sempre tecnologie di navigazione supplementari come il flusso ottico o il posizionamento visivo.
Conclusione
La tecnologia GNSS si è evoluta drasticamente dalle sue origini militari per diventare una componente essenziale dei moderni sistemi di droni. Il passaggio dai ricevitori GPS a singola costellazione ai ricevitori GNSS multi-costellazione ha migliorato significativamente le prestazioni di navigazione, l'affidabilità e le capacità.
Comprendere le differenze tra GPS, GLONASS, Galileo e BeiDou, così come l'evoluzione della tecnologia dei ricevitori dai primi moduli alle più recenti generazioni M10 e F9P, permette ai piloti di droni di prendere decisioni informate sui loro sistemi di navigazione. Che tu stia volando per divertimento, gare, freestyle o applicazioni professionali, selezionare la tecnologia GNSS appropriata e implementarla correttamente può migliorare le capacità e la sicurezza del tuo drone.
Poiché la tecnologia GNSS continua a progredire con la ricezione multi-banda, algoritmi migliorati e l'integrazione con altri sensori, possiamo aspettarci prestazioni ancora migliori in ambienti impegnativi e un posizionamento più preciso per applicazioni specializzate. Rimanendo informati su questi sviluppi e comprendendo come ottimizzare la configurazione attuale, puoi garantire che il tuo sistema di navigazione per droni funzioni al meglio.


