Technologie GNSS : Un guide complet pour une navigation sûre
Bien que le terme "GPS" soit souvent utilisé comme terme générique pour la navigation par satellite dans les drones, les systèmes de navigation modernes tirent en réalité parti de plusieurs constellations de satellites collectivement connues sous le nom de GNSS (Global Navigation Satellite Systems). Après des années de construction et de pilotage de drones avec divers systèmes de navigation, j'ai pu constater de première main comment une mise en œuvre appropriée du GNSS peut faire la différence entre un drone qui revient de manière fiable à la maison et un drone qui devient un ornement d'arbre coûteux. Ce guide complet explore les différents systèmes de navigation par satellite, leurs caractéristiques, l'évolution des modules récepteurs GNSS et comment ces technologies améliorent les capacités de navigation des drones.
Introduction à la technologie GNSS
GNSS (Global Navigation Satellite System) fait référence à la constellation de satellites fournissant des signaux depuis l'espace qui transmettent des données de positionnement et de synchronisation aux récepteurs GNSS. Ces récepteurs utilisent ensuite ces données pour déterminer la position. Bien que le GPS soit le GNSS le plus connu, il existe plusieurs autres systèmes et les récepteurs modernes utilisent souvent plusieurs systèmes simultanément pour améliorer les performances.

Je me souviens encore de mon premier drone équipé d'un GPS en 2020. Il utilisait un module primitif Ublox LEA-6H qui mettait près de deux minutes pour obtenir un verrouillage de position et dérivait de plusieurs mètres pendant un vol stationnaire. Aujourd'hui, je vole avec des récepteurs multi-constellations qui se verrouillent en quelques secondes et maintiennent la position avec une précision remarquable. L'évolution a été tout simplement révolutionnaire pour les capacités des drones.
L'évolution de la navigation par satellite
La navigation par satellite a considérablement évolué depuis sa création :
• Origines militaires (années 1970-1980) : Le GPS a été développé par le département américain de la Défense pour des applications militaires. La technologie était strictement contrôlée et limitée dans les applications civiles.
• Accès civil (années 1990) : La politique de disponibilité sélective rendait délibérément le GPS moins précis pour une utilisation civile. Les premières unités GPS avaient des erreurs de plus de 100 mètres !
• Accès civil complet (années 2000) : La suppression de la disponibilité sélective a permis des applications civiles précises. Ce fut un changement de donne qui a ouvert la voie à une navigation fiable des drones.
• Ère multi-constellations (années 2010) : Le développement et le déploiement de systèmes alternatifs comme GLONASS, Galileo et BeiDou ont créé une redondance et amélioré les performances. J'ai remarqué une amélioration significative de la fiabilité de navigation de mes drones lorsque je suis passé de modules GPS seuls à des modules GPS+GLONASS vers 2022.
• Intégration moderne (présent) : Les récepteurs multi-constellations sont devenus la norme dans les appareils grand public. Aujourd'hui, même les drones bon marché peuvent accéder simultanément à plus de 30 satellites pour un positionnement au centimètre près.
Principes de base de la navigation par satellite
Tous les systèmes GNSS fonctionnent selon des principes similaires, bien que la compréhension de ces principes fondamentaux m'ait aidé à résoudre d'innombrables problèmes de navigation au fil des années :
- Constellation de satellites : Un réseau de satellites en orbite autour de la Terre diffuse des signaux de temps et de position précis. Plus votre récepteur peut "voir" de satellites, meilleure est la précision de votre position.
- Transmission du signal : Ces satellites diffusent des informations précises sur le temps et la position sur des fréquences radio spécifiques. Les signaux sont incroyablement faibles lorsqu'ils atteignent la Terre - environ la même puissance qu'une ampoule de 50 watts vue à 12 000 miles de distance !
- Trilatération : Le récepteur de votre drone calcule la position en mesurant les retards de temps de plusieurs satellites. J'aime expliquer cela comme le récepteur qui demande "À quelle distance suis-je du satellite A ? À quelle distance du satellite B ?" et ainsi de suite, puis détermine la seule position possible qui satisfait toutes ces distances.
- Exigences minimales : Vous avez besoin d'au moins 4 satellites pour un positionnement 3D (latitude, longitude, altitude). J'ai appris par expérience que si 4 satellites fonctionneront, vous en voulez vraiment 8 ou plus pour une navigation fiable des drones.
- Correction d'erreur : Diverses techniques améliorent la précision en tenant compte des retards atmosphériques, des erreurs d'horloge et d'autres facteurs. Les récepteurs modernes sont remarquablement bons pour cela, c'est pourquoi les drones d'aujourd'hui peuvent maintenir leur position avec tant de précision.
Métriques de performance clés
Plusieurs facteurs déterminent les performances GNSS, et la compréhension de ces facteurs m'a aidé à choisir les bons modules pour différentes applications :
• Précision : La proximité entre la position mesurée et la position réelle. Pour la navigation standard des drones, une précision de 2 à 3 mètres est généralement suffisante, mais pour la cartographie ou les applications de précision, vous pourriez avoir besoin d'une précision au centimètre près.
• Disponibilité : Le pourcentage de temps pendant lequel le service est utilisable. J'ai constaté que les récepteurs multi-constellations améliorent considérablement cette métrique, en particulier dans des environnements difficiles comme les zones urbaines ou sous un couvert forestier partiel.
• Continuité : La capacité à fonctionner sans interruption. C'est essentiel pour les missions autonomes - une perte momentanée de GNSS pendant un vol longue portée peut être désastreuse.
• Intégrité : La confiance que le système fournit des informations correctes. Les récepteurs modernes disposent d'algorithmes sophistiqués pour détecter et rejeter les mesures erronées.
• Temps jusqu'à la première correction (TTFF) : La rapidité avec laquelle une position peut être établie. Je me souviens de l'époque où il fallait attendre plusieurs minutes avec des récepteurs bas de gamme pour obtenir un verrouillage GPS avant le décollage - maintenant, c'est généralement une question de secondes avec les modules modernes.
• Taux de mise à jour : La fréquence à laquelle la position est mise à jour. Pour les courses ou les vols dynamiques, des taux de mise à jour plus élevés (10 Hz ou plus) offrent une navigation sensiblement plus fluide.
Principales constellations GNSS
Au fil des années, j'ai utilisé des récepteurs qui prennent en charge diverses combinaisons de ces systèmes, et chacun a ses forces et ses faiblesses. La compréhension de leurs différences m'a aidé à optimiser mes drones pour différentes conditions de vol.
GPS (Global Positioning System)
Le système de navigation par satellite original et le plus largement utilisé :
• Pays/Région : États-Unis
• Mise en service initiale : 1978 (limitée), pleine capacité opérationnelle en 1995
• Satellites : 31 satellites opérationnels (24 requis pour une couverture mondiale)
• Caractéristiques orbitales :
- Orbite terrestre moyenne à environ 20 200 km
- 6 plans orbitaux avec 4 satellites ou plus chacun
- Période orbitale de 12 heures
• Fréquences de signal :
- L1 (1575,42 MHz) - Fréquence civile principale
- L2 (1227,60 MHz) - Utilisée pour les applications militaires et civiles avancées
- L5 (1176,45 MHz) - Nouvelle fréquence pour les applications de sécurité des personnes
• Précision :
- Service de positionnement standard (SPS) : ~3-5 mètres
- Service de positionnement précis (PPS) : ~<1 mètre (militaire)
Le GPS a été l'épine dorsale de la navigation des drones pendant des années, et je le considère toujours comme le système le plus fiable dans l'ensemble. J'ai volé dans des régions reculées du monde entier, et la couverture GPS m'a rarement laissé tomber. La maturité du système et son programme de modernisation continue en font un choix fiable pour la plupart des applications.
Une limitation du GPS est que ses performances peuvent se dégrader dans les hautes latitudes (près des pôles) en raison de la configuration de l'orbite des satellites. Les signaux peuvent également être affectés par les canyons urbains et le feuillage dense, c'est pourquoi l'accès à plusieurs constellations est si précieux.
GLONASS (GLObal NAvigation Satellite System)
L'alternative russe au GPS est devenue un complément important dans les récepteurs modernes :
• Pays/Région : Russie
• Mise en service initiale : 1982 (limitée), capacité opérationnelle complète rétablie en 2011
• Satellites : 24 satellites opérationnels
• Caractéristiques orbitales :
- Orbite terrestre moyenne à environ 19 100 km
- 3 plans orbitaux avec 8 satellites chacun
- Période orbitale de 11 heures 15 minutes
• Fréquences des signaux :
- L1 (1598,0625 - 1605,375 MHz)
- L2 (1242,9375 - 1248,625 MHz)
- L3 (1202,025 MHz)
• Précision :
- Précision standard : ~4-7 mètres
- Haute précision : ~<1 mètre (militaire)
J'ai ajouté pour la première fois la capacité GLONASS à mes drones vers 2022, et l'amélioration a été immédiatement perceptible. Le système est particulièrement performant aux hautes latitudes - j'ai volé dans le nord de la Norvège où les satellites GLONASS étaient souvent plus nombreux que les GPS dans le champ de vision de mon récepteur.
GLONASS complète extrêmement bien le GPS dans les récepteurs combinés. Bien qu'historiquement moins stable que le GPS (il y a eu une période dans les années 1990 où le système a failli s'effondrer), le GLONASS moderne est très fiable. J'ai constaté que le fait d'avoir les deux systèmes actifs offre une excellente redondance - si un système a des problèmes, l'autre permet à votre drone de naviguer en toute sécurité.
Galileo
Le GNSS contrôlé par les civils de l'Union européenne est le dernier acteur majeur en date, et j'ai été impressionné par ses performances :
• Pays/Région : Union européenne
• Mise en service initiale : 2016 (services initiaux), capacité opérationnelle complète prévue d'ici 2026
• Satellites : 28 prévus (24 opérationnels + 4 de rechange), 26 actuellement en orbite
• Caractéristiques orbitales :
- Orbite terrestre moyenne à environ 23 222 km
- 3 plans orbitaux avec 8 à 10 satellites chacun
- Période orbitale de 14 heures
• Fréquences des signaux :
- E1 (1575,42 MHz) - Identique au GPS L1
- E5a (1176,45 MHz) - Identique au GPS L5
- E5b (1207,14 MHz)
- E6 (1278,75 MHz)
• Précision :
- Service ouvert : ~1-3 mètres
- Service de haute précision : ~20 cm
- Service public réglementé : Crypté pour usage gouvernemental
Lorsque j'ai activé Galileo sur mes drones vers 2022, j'étais sceptique quant à savoir si cela ferait une différence notable. À ma grande surprise, c'était le cas - en particulier dans les environnements urbains où les bâtiments peuvent bloquer certains signaux satellites. Le fait d'avoir ces satellites Galileo supplémentaires en vue a permis d'obtenir des performances de navigation plus constantes.
Galileo a été conçu spécifiquement pour les applications civiles, avec une précision supérieure à celle du GPS standard. J'apprécie son système avancé de surveillance de l'intégrité, qui permet de détecter et d'atténuer les signaux peu fiables. Le système est également entièrement interopérable avec le GPS, ce qui rend l'intégration transparente dans les récepteurs modernes.
Bien que Galileo n'ait pas encore atteint sa pleine capacité opérationnelle, il fournit déjà un excellent service. La seule limitation que j'ai rencontrée est que certains récepteurs plus anciens ne le prennent pas en charge, mais tout module GNSS moderne tirera pleinement parti de ces satellites.
BeiDou (BDS)
Le système de navigation par satellite chinois a rapidement évolué pour devenir un acteur mondial :
• Pays/Région : Chine
• Mise en service initiale : BeiDou-1 (2000), BeiDou-2 (2012), BeiDou-3 (2020)
• Satellites : 35 satellites opérationnels
• Caractéristiques orbitales :
- Mélange d'orbite terrestre moyenne (27 satellites à 21 500 km)
- Orbite géostationnaire (5 satellites)
- Orbite géosynchrone inclinée (3 satellites)
• Fréquences des signaux :
- B1I (1561,098 MHz)
- B1C (1575,42 MHz) - Identique au GPS L1
- B2a (1176,45 MHz) - Identique au GPS L5
- B2b (1207,14 MHz) - Identique à Galileo E5b
- B3I (1268,52 MHz)
• Précision :
- Service mondial : ~3-5 mètres
- Service régional : ~2-3 mètres
J'ai commencé à utiliser des récepteurs compatibles BeiDou vers 2022, et le système s'est avéré être un ajout précieux à l'écosystème GNSS. L'aspect unique de BeiDou est sa conception de constellation hybride, avec des satellites dans différents types d'orbites. Cela permet une couverture améliorée dans la région Asie-Pacifique, où j'ai remarqué des performances particulièrement solides.
Une caractéristique intéressante de BeiDou, que les autres systèmes n'ont pas, est sa capacité de messagerie - le système peut en fait transmettre de courts messages texte, bien que cela ne soit généralement pas utilisé dans les applications de drones. Le service mondial complet a été achevé en 2020, faisant de BeiDou le plus récent système de navigation mondial complet.
D'après mon expérience, l'intégration de BeiDou a été transparente dans les récepteurs modernes, bien que la documentation en anglais ait été limitée au début. Aujourd'hui, il fait partie intégrante des récepteurs multi-constellations et contribue de manière significative aux performances globales de navigation.
Systèmes régionaux
En plus des systèmes mondiaux, il existe plusieurs systèmes GNSS régionaux qui peuvent offrir des avantages supplémentaires dans des zones spécifiques :
QZSS (Quasi-Zenith Satellite System)
• Pays/Région : Japon
• Couverture : Japon et région Asie-Océanie
• Satellites : 4 satellites opérationnels
QZSS est conçu pour fonctionner dans les canyons urbains du Japon, avec des satellites sur des orbites qui les maintiennent à haute altitude au-dessus du Japon. J'ai vu des gens voler avec des récepteurs compatibles QZSS à Tokyo, et l'amélioration des performances en milieu urbain était notable - les maintiens de position étaient plus stables entre les grands bâtiments qu'avec les constellations mondiales seules.
NavIC (Navigation with Indian Constellation)
• Pays/Région : Inde
• Couverture : Inde et région environnante (1 500 km)
• Satellites : 7 satellites opérationnels
NavIC est optimisé pour le sous-continent indien. Bien que je ne l'aie pas personnellement testé de manière approfondie, des collègues qui volent en Inde rapportent de bons résultats lorsque leurs récepteurs prennent en charge ce système régional en plus des constellations mondiales.
Avantages multi-constellations pour les drones
L'utilisation simultanée de plusieurs constellations GNSS offre plusieurs avantages pour les opérations de drones. J'ai expérimenté ces avantages de première main au fur et à mesure que j'ai mis à niveau mes systèmes de navigation au fil des ans.
Amélioration de la disponibilité des satellites
L'avantage le plus immédiat des récepteurs multi-constellations est simplement d'avoir plus de satellites en vue :
• Plus de satellites visibles : Les constellations combinées fournissent plus de 30 satellites visibles dans des conditions de ciel dégagé. Je vois régulièrement 20 à 25 satellites, contre seulement 8 à 10 avec le GPS seul.
• Performances en canyon urbain : Meilleur positionnement dans les villes et les zones obstruées. J'ai volé entre des bâtiments où les récepteurs GPS seuls perdaient le verrouillage, mais les systèmes multi-constellations maintenaient une navigation stable.
• Réduction de la dilution géométrique de la précision (GDOP) : Plus de satellites signifie une meilleure géométrie et un positionnement plus précis. Cela se traduit par un vol stationnaire et une navigation plus précis.
• Impact pratique : Je constate moins de pertes de signal GPS pendant le vol, en particulier dans des environnements difficiles. Cela a sauvé plusieurs de mes drones de dérives ou de crashs potentiels.
Précision améliorée
La collaboration de plusieurs constellations améliore la précision globale du positionnement :
• Moyenne des erreurs : L'utilisation de plusieurs systèmes permet de compenser les erreurs individuelles de chaque système. J'ai observé une amélioration du maintien en position, passant de ±3 mètres avec le GPS seul à une précision submétrique avec des récepteurs multi-constellations.
• Validation croisée : Les positions de différents systèmes peuvent se valider mutuellement, en rejetant les valeurs aberrantes. Cela a éliminé les "sauts" de position occasionnels que je constatais auparavant avec des récepteurs mono-constellation.
• Précision améliorée : Les calculs de position utilisant plus de satellites sont généralement plus précis. C'est particulièrement notable pour le maintien d'altitude, qui tend à être la dimension la plus faible dans le positionnement GNSS.
• Impact pratique : Mes drones maintiennent désormais un maintien en position et une navigation plus stables, rendant les missions autonomes plus fiables et les séquences vidéo plus fluides.
Redondance système
L'avantage le plus important pour les opérations critiques de drones est peut-être la redondance :
• Protection contre les défaillances : Si un système rencontre des problèmes, les autres peuvent compenser. Une fois, j'ai volé dans une zone avec du brouillage GPS (probablement non intentionnel), mais mon drone a continué à naviguer normalement en utilisant GLONASS et Galileo.
• Résistance au brouillage : L'utilisation de différentes fréquences rend le brouillage complet plus difficile. C'est particulièrement important pour les opérations professionnelles où l'intégrité du signal est critique.
• Détection de leurrage : Des divergences entre les systèmes peuvent indiquer des tentatives de leurrage. Bien que rare, le leurrage GPS est une préoccupation croissante pour les opérations sensibles de drones.
• Impact pratique : J'ai constaté que les fonctions de retour au point de départ et autonomes sont nettement plus fiables avec des récepteurs multi-constellations. Cela apporte une tranquillité d'esprit lors de vols longue portée.
Acquisition plus rapide
Obtenir rapidement un verrouillage de position est important pour des opérations de terrain efficaces :
• Traitement parallèle : Les récepteurs peuvent acquérir simultanément des signaux de plusieurs systèmes. Cela réduit considérablement le temps d'attente avant le décollage.
• Réduction du TTFF : Établissement plus rapide de la position au démarrage. Ce qui prenait des minutes ne prend maintenant que quelques secondes.
• Amélioration du démarrage à froid : Particulièrement bénéfique pour les démarrages à froid lorsque le récepteur n'a pas de données satellites récentes. J'ai vu les temps de démarrage à froid passer de plus de 60 secondes à moins de 30 secondes avec des récepteurs multi-constellations.
• Impact pratique : Un verrouillage GPS plus rapide avant le décollage signifie moins de temps d'attente et plus de temps de vol. C'est particulièrement précieux dans un contexte professionnel où le temps, c'est de l'argent.
Évolution des récepteurs GNSS pour drones
J'ai utilisé presque toutes les générations de récepteurs GNSS dans mes drones, et l'évolution a été remarquable. Chaque génération a apporté des améliorations significatives en termes de performances, de taille et de capacités.
Générations de récepteurs
Premiers GPS pour drones (2010-2014)
Mes premiers drones équipés de GPS utilisaient des modules comme le Ublox LEA-6 et le NEO-6. C'était révolutionnaire à l'époque, mais primitif selon les standards actuels :
• Caractéristiques :
- Réception GPS uniquement
- Taux de rafraîchissement plus lents (1-5Hz)
- Sensibilité plus faible
- Taille plus grande
- Consommation électrique plus élevée
• Performances :
- Précision : 5-10 mètres
- TTFF : 45-60 secondes à froid
- Capacité satellite : 12-16 canaux
Je me souviens de la frustration d'attendre un verrouillage GPS avant chaque vol, souvent debout dans un champ ouvert pendant plusieurs minutes. Le maintien en position était au mieux approximatif, le drone dérivant de plusieurs mètres dans chaque direction. Le retour au point de départ était une expérience stressante - on ne savait jamais exactement où le drone déciderait que se trouvait le "point de départ" !
GNSS de moyenne génération (2015-2018)
À un moment donné, je suis passé à des modules comme le Ublox NEO-7 et le NEO-M8N, qui ont apporté des améliorations significatives :
• Caractéristiques :
- Réception GPS + GLONASS
- Taux de rafraîchissement modérés (5-10Hz)
- Sensibilité améliorée
- Facteurs de forme plus petits
- Consommation électrique réduite
• Performances :
- Précision : 2-5 mètres
- TTFF : 30-45 secondes à froid
- Capacité satellite : 32-72 canaux
L'ajout de GLONASS a été un changement radical en termes de fiabilité. J'ai immédiatement remarqué que mes drones maintenaient le verrouillage de position dans des zones où ils avaient auparavant des difficultés. Le M8N est devenu le cheval de bataille de la navigation des drones pendant cette période - j'ai encore plusieurs drones volant avec ces modules aujourd'hui.
GNSS modernes (2019-2022)
En 2022, j'ai commencé à mettre à niveau ma flotte avec des modules comme le Ublox NEO-M9N et le SAM-M8Q :
• Caractéristiques :
- Multi-constellations (GPS, GLONASS, Galileo, BeiDou)
- Taux de rafraîchissement plus rapides (10-18Hz)
- Haute sensibilité
- Designs compacts
- Fonctionnement économe en énergie
• Performances :
- Précision : 1-3 mètres
- TTFF : 15-30 secondes à froid
- Capacité satellite : 72-184 canaux
L'amélioration des performances était substantielle. Le maintien en position est devenu très stable et la précision du retour au point de départ s'est améliorée jusqu'à un mètre du point de décollage. La capacité à utiliser simultanément les quatre principales constellations a fourni une excellente redondance et de bonnes performances dans des environnements difficiles.
Dernière génération (2023-présent)
Mes constructions les plus récentes utilisent des modules de pointe comme le Ublox NEO-M10 et le ZED-F9P (pour les applications RTK) :
• Caractéristiques :
- Multi-constellations et multi-fréquences complètes
- Taux de rafraîchissement élevés (jusqu'à 25Hz)
- Sensibilité extrêmement élevée
- Boîtiers ultra-compacts
- Très faible consommation électrique
- Capacité RTK dans les modèles haut de gamme
• Performances :
- Précision : 0,5-2 mètres (standard), 1-3cm (RTK)
- TTFF : 5-15 secondes à froid
- Capacité satellite : 184+ canaux
Ces derniers modules représentent un bond quantique en termes de performances. La série M10 offre une sensibilité et une efficacité énergétique exceptionnelles, tandis que le F9P apporte une précision RTK de qualité topographique aux drones grand public. J'ai été particulièrement impressionné par leurs performances dans des environnements difficiles comme les zones urbaines et les canopées forestières légères.
Examen détaillé des modules GNSS populaires pour drones
Au fil des années, j'ai utilisé la plupart des modules GNSS populaires dans diverses constructions. Voici mon évaluation de leurs capacités et de leurs applications idéales :
Ublox NEO-M8N
Le cheval de bataille du GNSS pour drones pendant de nombreuses années, et encore largement utilisé :
• Constellations : GPS, GLONASS, Galileo, BeiDou (réception simultanée de jusqu'à 3)
• Canaux : 72 canaux de suivi
• Taux de rafraîchissement : Jusqu'à 10Hz (typiquement 5Hz dans les drones)
• Sensibilité : -167dBm en suivi
• Précision : 2,5m CEP (Erreur Circulaire Probable)
• Consommation électrique : 23mA @ 3,3V
J'ai installé des dizaines de modules M8N dans divers drones, et ils offrent un excellent équilibre entre performance et coût. Le module prend en charge la réception simultanée de jusqu'à trois constellations, bien que j'utilise généralement GPS+GLONASS pour la meilleure combinaison de performance et d'efficacité énergétique.
Une limitation que j'ai découverte est que l'activation de toutes les constellations simultanément peut parfois causer des problèmes de suivi en raison des limitations de canaux. Pour la plupart des applications, GPS+GLONASS ou GPS+Galileo fournit les meilleurs résultats.

Le M8N reste un choix solide pour la navigation générale, le retour au point de départ et le maintien de position. Les implémentations courantes incluent le BN-180, le BN-220 et de nombreux modules FC intégrés.
Ublox NEO-M9N
Le successeur amélioré du M8N, offrant des améliorations significatives :
• Constellations : GPS, GLONASS, Galileo, BeiDou (réception simultanée de tous)
• Canaux : 184 canaux de suivi
• Taux de mise à jour : Jusqu'à 25Hz (typiquement 10Hz dans les drones)
• Sensibilité : -167dBm suivi
• Précision : 1,5m CEP (Erreur Circulaire Probable)
• Consommation d'énergie : 45mA @ 3,3V (acquisition), 34mA (suivi)
Lorsque j'ai mis à niveau mon principal drone longue portée d'un M8N à un M9N, la différence était immédiatement perceptible. Le M9N peut suivre toutes les constellations simultanément sans limitations de canaux, fournissant une excellente redondance et performance.
Le taux de mise à jour plus élevé (10Hz vs 5Hz) se traduit par une navigation plus fluide et des ajustements de position plus réactifs. J'ai trouvé le M9N particulièrement précieux pour la navigation de précision et les missions de points de cheminement, où l'amélioration de la précision fait une différence notable.

Un inconvénient est la consommation d'énergie légèrement plus élevée, bien qu'elle soit encore négligeable dans le contexte de l'utilisation globale d'énergie du drone. Les implémentations courantes incluent le Matek M9N-5883 et le HGLRC M9N.
Ublox NEO-M10S
La dernière génération de GNSS standard, repoussant les limites de la performance :
• Constellations : GPS, GLONASS, Galileo, BeiDou, QZSS, NavIC (réception simultanée de tous)
• Canaux : 184+ canaux de suivi
• Taux de mise à jour : Jusqu'à 25Hz
• Sensibilité : -170dBm suivi
• Précision : 1,0m CEP (Erreur Circulaire Probable)
• Consommation d'énergie : 38mA @ 3,3V (pleine puissance), 12mA (économie d'énergie)
J'ai récemment commencé à tester la série M10 dans mes constructions les plus récentes, et les améliorations sont subtiles mais significatives. La caractéristique remarquable est l'efficacité énergétique exceptionnelle - le mode Super-E peut réduire la consommation d'énergie jusqu'à 70% tout en maintenant les performances.
La sensibilité améliorée (-170dBm vs -167dBm) se traduit par de meilleures performances dans des environnements difficiles comme les canyons urbains ou sous un léger couvert forestier. J'ai remarqué un suivi satellite plus cohérent dans des zones où les générations précédentes perdaient parfois le verrouillage.

Le M10 est idéal pour les missions longue portée où l'efficacité énergétique est importante, et pour voler dans des environnements difficiles. Il est encore relativement nouveau sur le marché des drones, mais je m'attends à ce qu'il devienne la nouvelle norme à mesure que la disponibilité s'améliore.
Ublox ZED-F9P
Le module haute précision capable de RTK pour les applications professionnelles :
• Constellations : GPS, GLONASS, Galileo, BeiDou (réception simultanée de tous)
• Canaux : 184 canaux de suivi
• Taux de mise à jour : Jusqu'à 25Hz
• Sensibilité : -167dBm suivi
• Précision : 1,0m CEP standard, 1cm + 1ppm avec RTK
• Consommation d'énergie : 68mA @ 3,3V
Pour mes drones de cartographie et de relevé, le F9P a été transformateur. La réception multi-bande (L1/L2/L5) et la capacité RTK permettent un positionnement au niveau du centimètre, ce qui est essentiel pour les applications de précision.
La configuration du RTK nécessite des composants supplémentaires - une station de base ou un service NTRIP pour les corrections, plus une liaison de données pour transmettre ces corrections au drone. J'utilise une connexion 4G/LTE pour mon drone de relevé, ce qui me permet de recevoir des corrections NTRIP de services publics.

Le F9P est surdimensionné pour les drones FPV ou de photographie standard, mais il est inestimable pour les applications de cartographie, de relevé, d'agriculture de précision et d'atterrissage automatisé. Les implémentations courantes incluent le Here3 et le Holybro H-RTK F9P.
Guide de sélection de module
Le choix du bon module GNSS dépend de vos besoins spécifiques. Voici mes conseils pratiques basés sur des années de construction et de pilotage de différentes configurations :
Pour la navigation de base
• Recommandé : NEO-M8N ou équivalent
• Considérations clés :
- Adéquat pour RTH et le maintien de position
- Bon équilibre entre performance et coût
- Largement pris en charge dans tous les firmwares de navigation
- Comprend généralement une boussole
J'utilise encore des modules M8N dans beaucoup de mes constructions car ils sont rentables et performent bien pour la navigation générale. Si vous construisez un drone FPV standard avec des besoins occasionnels de maintien de position et de retour au point de départ, le M8N reste un choix solide.
Pour la navigation avancée
• Recommandé : NEO-M9N ou équivalent
• Considérations clés :
- Meilleur pour les missions de points de cheminement
- Mises à jour de position plus rapides
- Plus fiable dans des environnements difficiles
- Vaut la peine d'être mis à niveau pour une navigation sérieuse
Pour mes drones autonomes à points de cheminement et mes constructions à longue portée, je me suis standardisé sur le M9N. L'amélioration de la précision et de la fréquence de mise à jour fait une différence notable dans les performances de navigation, et la capacité à utiliser toutes les constellations simultanément améliore la fiabilité dans des environnements variés.
Pour les applications professionnelles
• Recommandé : NEO-M10 ou ZED-F9P
• Considérations clés :
- M10 pour les meilleures performances GNSS standard
- F9P lorsqu'une précision centimétrique est requise
- Considérer les implications de puissance et de poids
- Peut nécessiter une configuration et un paramétrage supplémentaires
Mes drones d'arpentage et de cartographie utilisent le F9P pour un positionnement de précision centimétrique. Pour l'exploration à longue portée où une précision standard au niveau du mètre est suffisante mais où la fiabilité est primordiale, le M10 offre la meilleure combinaison de performances et d'efficacité énergétique.
Pour la longue portée/endurance
• Recommandé : NEO-M10 avec gestion de l'alimentation
• Considérations clés :
- L'efficacité énergétique devient critique
- La fiabilité est primordiale
- Considérer la qualité et le placement de l'antenne
- Systèmes de navigation de secours recommandés
Pour mes constructions à plus longue portée, l'efficacité énergétique et la fiabilité sont les principales priorités. Le mode Super-E du M10 offre d'excellentes économies d'énergie tout en maintenant les performances. Je porte également une attention particulière à la qualité et au placement de l'antenne, car la réception du signal devient de plus en plus importante au fur et à mesure que vous volez.
Mise en œuvre du module GNSS
La façon dont vous mettez en œuvre votre module GNSS peut être tout aussi importante que le module que vous choisissez. J'ai appris de nombreuses leçons sur l'installation optimale par essais et erreurs.
Intégration matérielle
Considérations sur l'antenne
L'antenne est essentielle pour les performances GNSS - une leçon que j'ai apprise à mes dépens après plusieurs constructions avec un placement d'antenne sous-optimal :
• Antennes patch : Les plus courantes dans les modules de drones
- Avantages : Compactes, directionnelles vers le haut, bonne vue du ciel
- Inconvénients : Les performances varient selon l'orientation
- Meilleures pratiques : Monter à plat avec une vue dégagée du ciel

La plupart de mes drones utilisent des antennes patch, qui fonctionnent bien lorsqu'elles sont montées à plat sur la plaque supérieure avec une vue dégagée du ciel. J'ai constaté que même une légère inclinaison peut réduire les performances, donc je veille à ce que l'antenne soit parfaitement de niveau.
• Antennes hélicoïdales : Présentes dans certains modules haute performance
- Avantages : Meilleure réception à basse élévation, moins sensible à l'orientation
- Inconvénients : Plus grandes, plus chères
- Meilleures pratiques : Nécessite toujours une exposition raisonnable au ciel

Pour mes constructions à longue portée, je préfère les antennes hélicoïdales malgré leur plus grande taille. Elles sont moins sensibles à l'orientation et offrent une meilleure réception lorsque le drone est incliné pendant les virages, ce qui aide à maintenir le verrouillage des satellites pendant les manœuvres agressives.
• Antennes externes : Option pour certains modules
- Avantages : Placement flexible, potentiellement de meilleures performances
- Inconvénients : Poids supplémentaire, complexité, dommages potentiels
- Meilleures pratiques : Utiliser un câble de haute qualité, minimiser la longueur
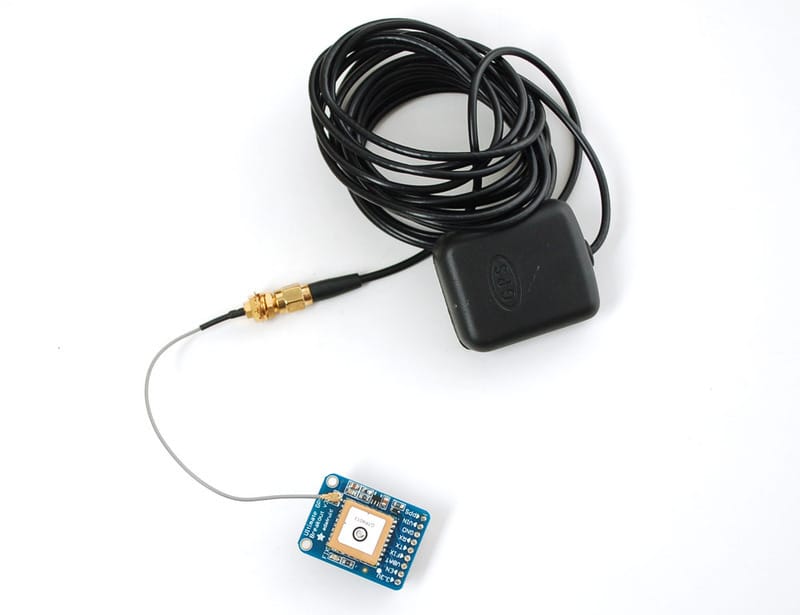
J'utilise des antennes externes sur mes drones de cartographie pour séparer l'antenne des sources d'interférences. La clé est d'utiliser des câbles courts et de haute qualité - j'ai appris par expérience que les câbles bon marché peuvent dégrader considérablement le signal.
Plan de masse
Le plan de masse affecte les performances de l'antenne - un détail que de nombreux constructeurs négligent :
• Objectif : Réfléchit les signaux et améliore la réception
• Mise en œuvre : Plaque métallique ou zone de PCB sous l'antenne
• Taille : Idéalement au moins 60-80 mm de diamètre pour des performances optimales
• Alternatives : Certains modules incluent un plan de masse intégré

Après avoir expérimenté différentes configurations de plan de masse, j'ai constaté qu'un simple disque en aluminium (environ 70 mm de diamètre) sous le module GNSS peut améliorer la réception de 2 à 3 dB - équivalent à une sensibilité 30 à 50 % meilleure. Pour les modules sans plan de masse intégré, cet ajout simple fait une différence notable dans l'acquisition et la rétention des satellites.
Emplacement de montage
L'endroit où vous placez le module GNSS est très important :
• Montage en pile : À l'intérieur du cadre
- Avantages : Protection contre les crashs
- Inconvénients : Interférences potentielles des composants électroniques, vue du ciel bloquée
- Meilleures pratiques : Uniquement avec des modules à haute sensibilité, blocage de la fibre de carbone
J'ai essayé de monter des modules GNSS en pile à l'intérieur du cadre, mais les résultats ont été décevants en raison du blocage du signal par la plaque supérieure. Je ne recommande cette approche que pour les très petites constructions où le montage supérieur n'est pas pratique, et uniquement avec des modules à haute sensibilité.
• Plaque supérieure : Emplacement le plus courant
- Avantages : Vue dégagée du ciel, à l'écart des interférences au sol
- Inconvénients : Exposition aux dommages en cas de crash
- Meilleures pratiques : Au centre du drone si possible

La plupart de mes drones ont le module GNSS monté sur la plaque supérieure, ce qui offre la meilleure vue du ciel. Je le positionne généralement à l'arrière dans un plateau d'extension imprimé en 3D pour l'équilibre et pour minimiser l'impact de l'inclinaison du cadre pendant le vol.
• Montage sur mât : Surélevé au-dessus du cadre
- Avantages : Excellente vue du ciel, interférences réduites
- Inconvénients : Vulnérabilité aux crashs, poids supplémentaire
- Meilleures pratiques : Utiliser avec un boîtier de protection

Pour mes drones de cartographie où les performances GNSS sont critiques, j'utilise des montages sur mât pour surélever l'antenne au-dessus de toutes les sources potentielles d'interférences. La clé est d'utiliser un boîtier ou un design protecteur qui peut résister aux crashs - j'ai perdu quelques antennes en apprenant cette leçon !
Atténuation des interférences
Les signaux GNSS sont très faibles et sensibles aux interférences - un fait dont je suis devenu intimement familier en dépannant une mauvaise réception :
• Sources d'interférences :
- Systèmes de distribution d'énergie
- Émetteurs vidéo
- Bruit des moteurs et des ESC
- Blocage de la fibre de carbone
- Autres systèmes radio
• Stratégies d'atténuation :
- Maintenir une distance avec les câbles d'alimentation et le VTX
- Utiliser des câbles blindés pour le module GNSS
- Ajouter des noyaux de ferrite aux fils d'alimentation
- Envisager un matériau de blindage RF
- Garder les antennes éloignées de la fibre de carbone
L'une des plus grandes leçons que j'ai apprises est l'importance de garder l'antenne GNSS éloignée des émetteurs vidéo. Sur une construction, j'ai eu des problèmes de réception persistants jusqu'à ce que je réalise que l'antenne VTX n'était qu'à 3 cm de l'antenne GPS. La déplacer à l'extrémité opposée du cadre a immédiatement résolu le problème.
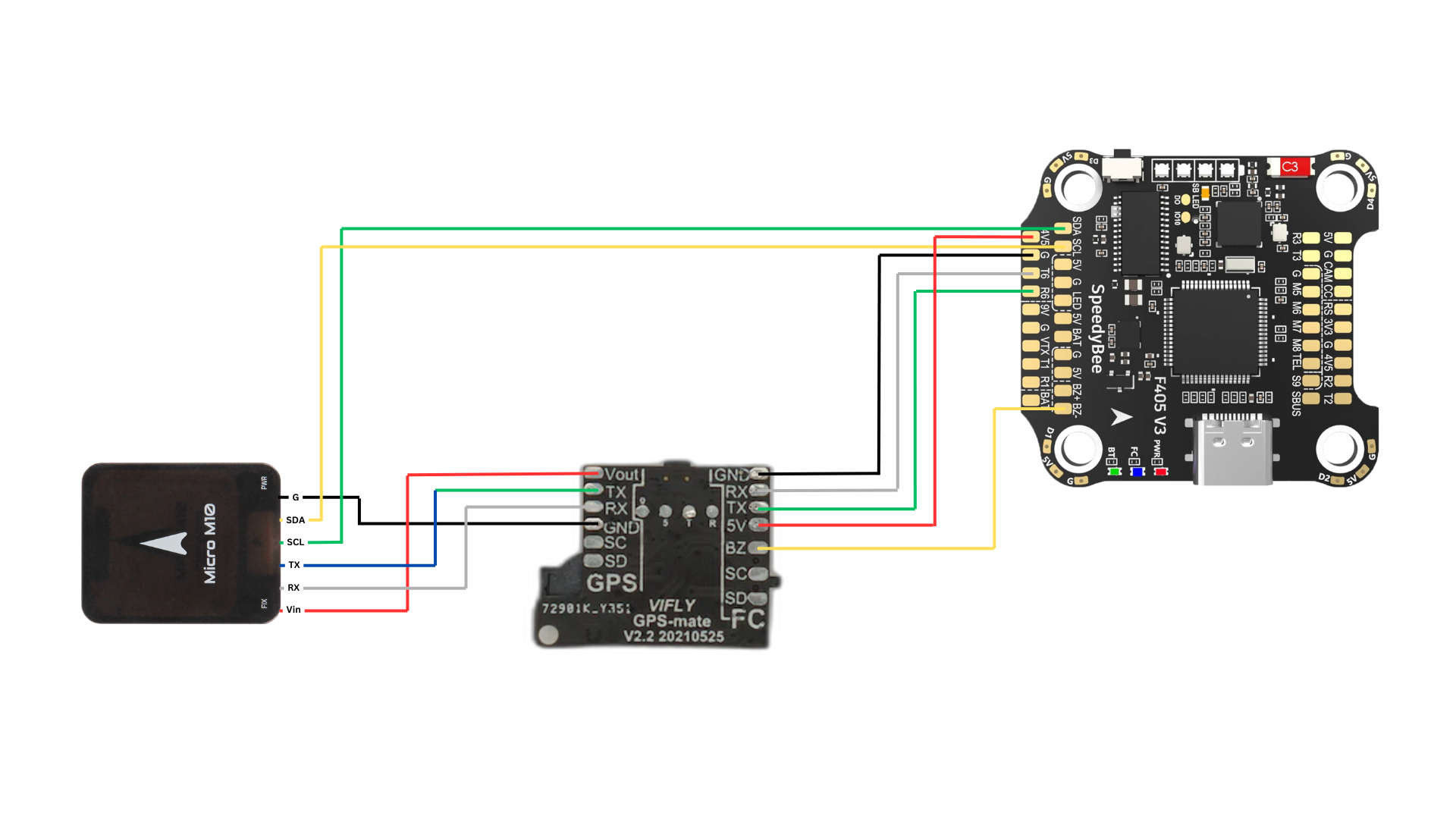
Malheureusement, dans la plupart de mes constructions, l'espace devient un problème et je n'ai pas toujours la possibilité de placer le module GPS complètement isolé des autres antennes. Dans de tels cas, des produits comme le GPS-mate sont de véritables sauveurs.

Pour les constructions avec des plaques supérieures en fibre de carbone, j'utilise toujours une entretoise non conductrice pour surélever le module GNSS d'au moins 10 à 15 mm au-dessus de la fibre de carbone. Ce simple changement peut considérablement améliorer la réception en empêchant la fibre de carbone de bloquer les signaux satellites.
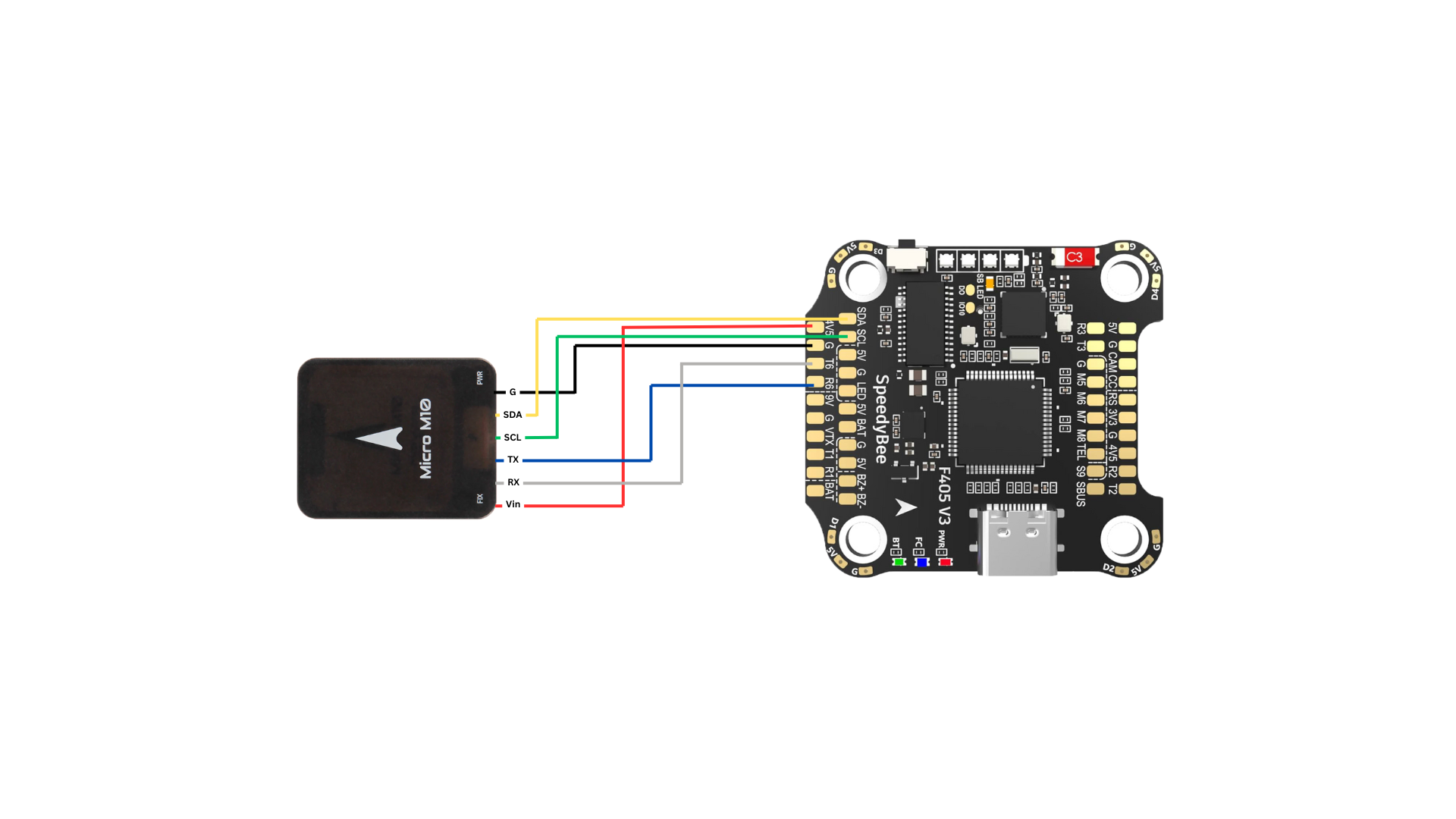
Câblage
Configuration logicielle
Paramètres du firmware
Les firmwares modernes de contrôleur de vol offrent diverses options de configuration GNSS. Voici ce qui fonctionne le mieux selon mon expérience dans différents systèmes :
Paramètres GNSS INAV
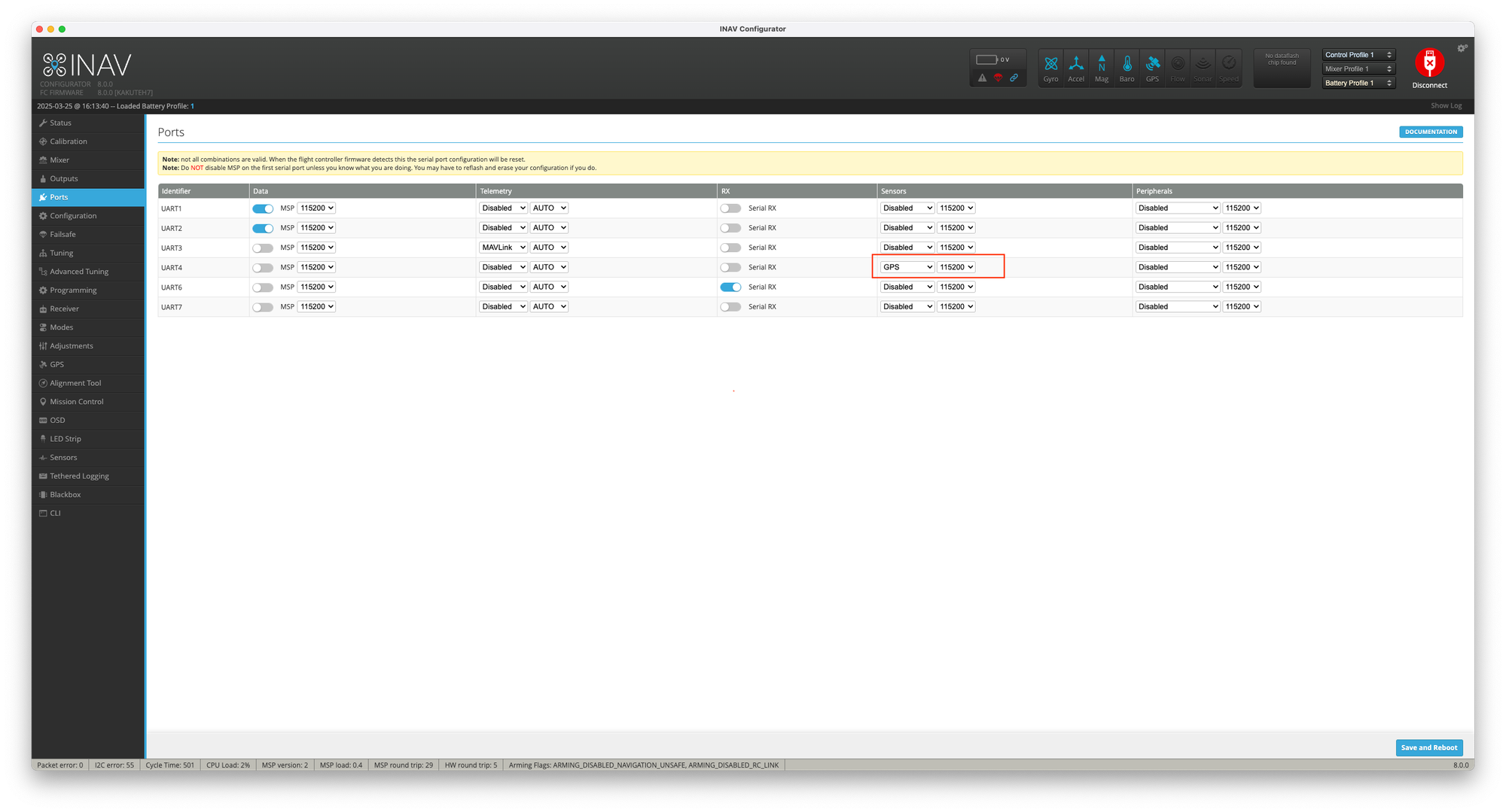
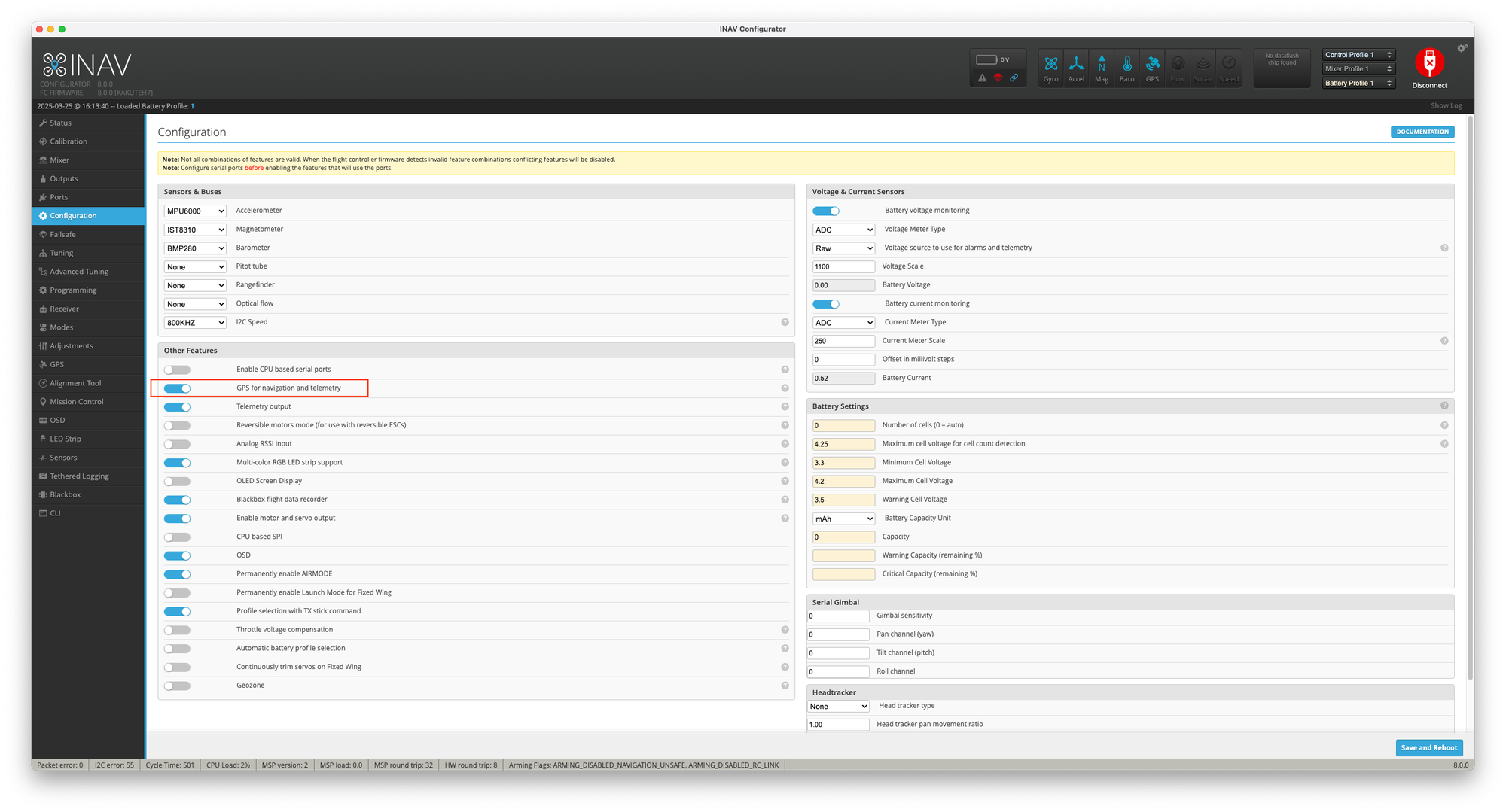
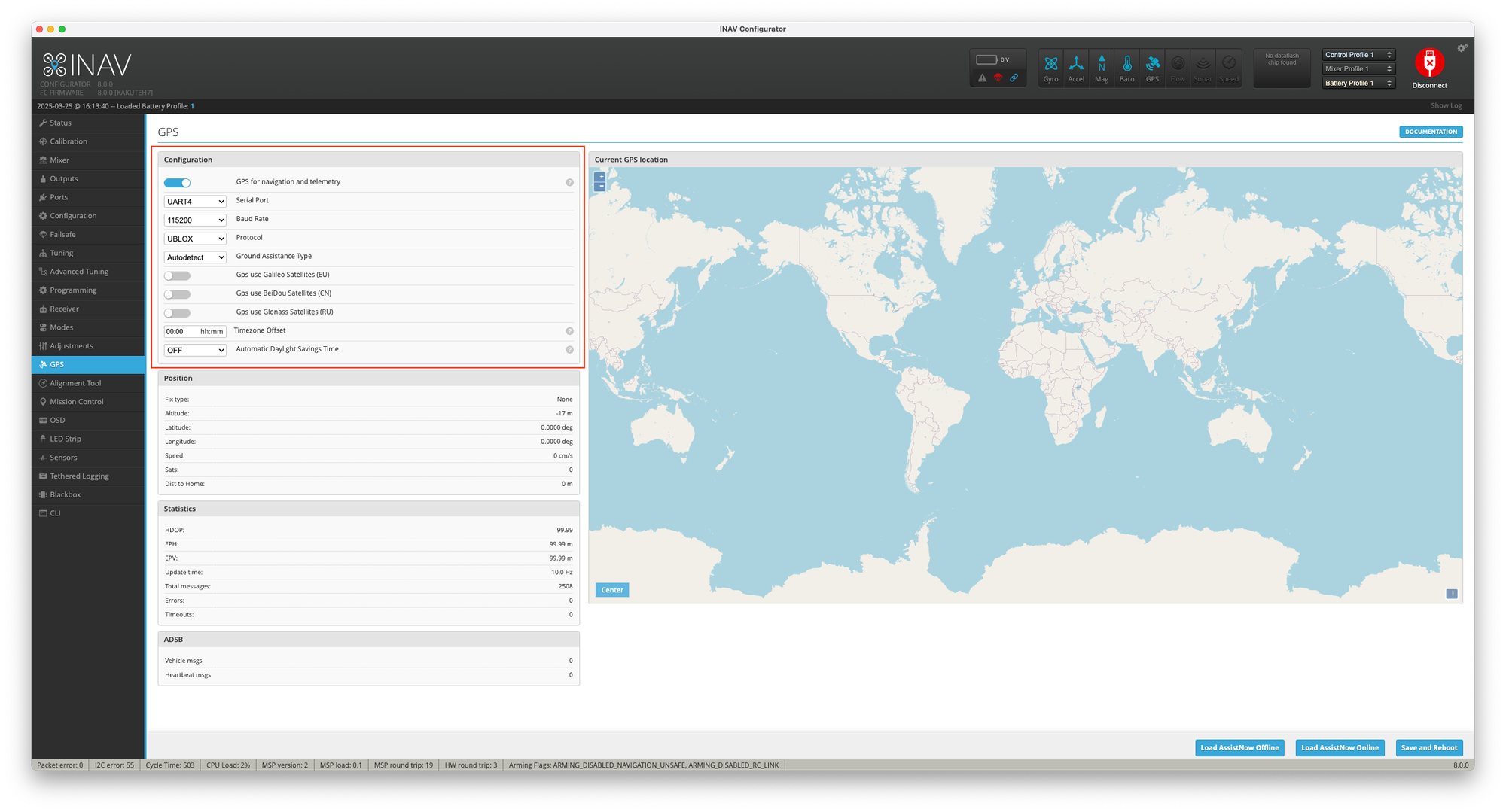
J'ai constaté que la combinaison des données GNSS avec celles du baromètre offre le maintien d'altitude le plus stable. L'ajout du magnétomètre (UBLOX+BARO+MAG) peut améliorer l'estimation de la position dans certains cas, mais il est plus sensible aux interférences. La tendance est de s'éloigner des magnétomètres à mesure que la précision du positionnement GPS évolue.
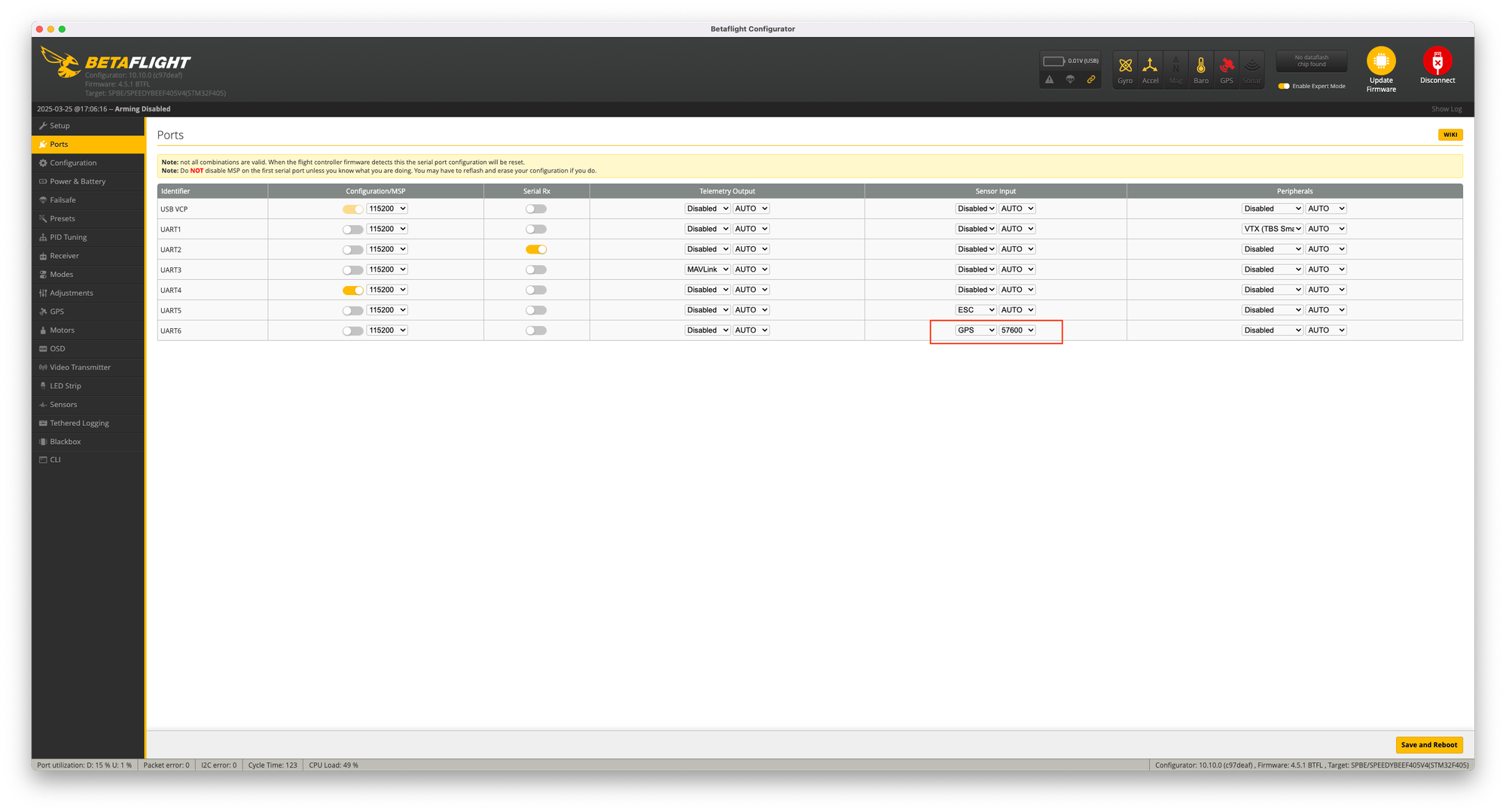
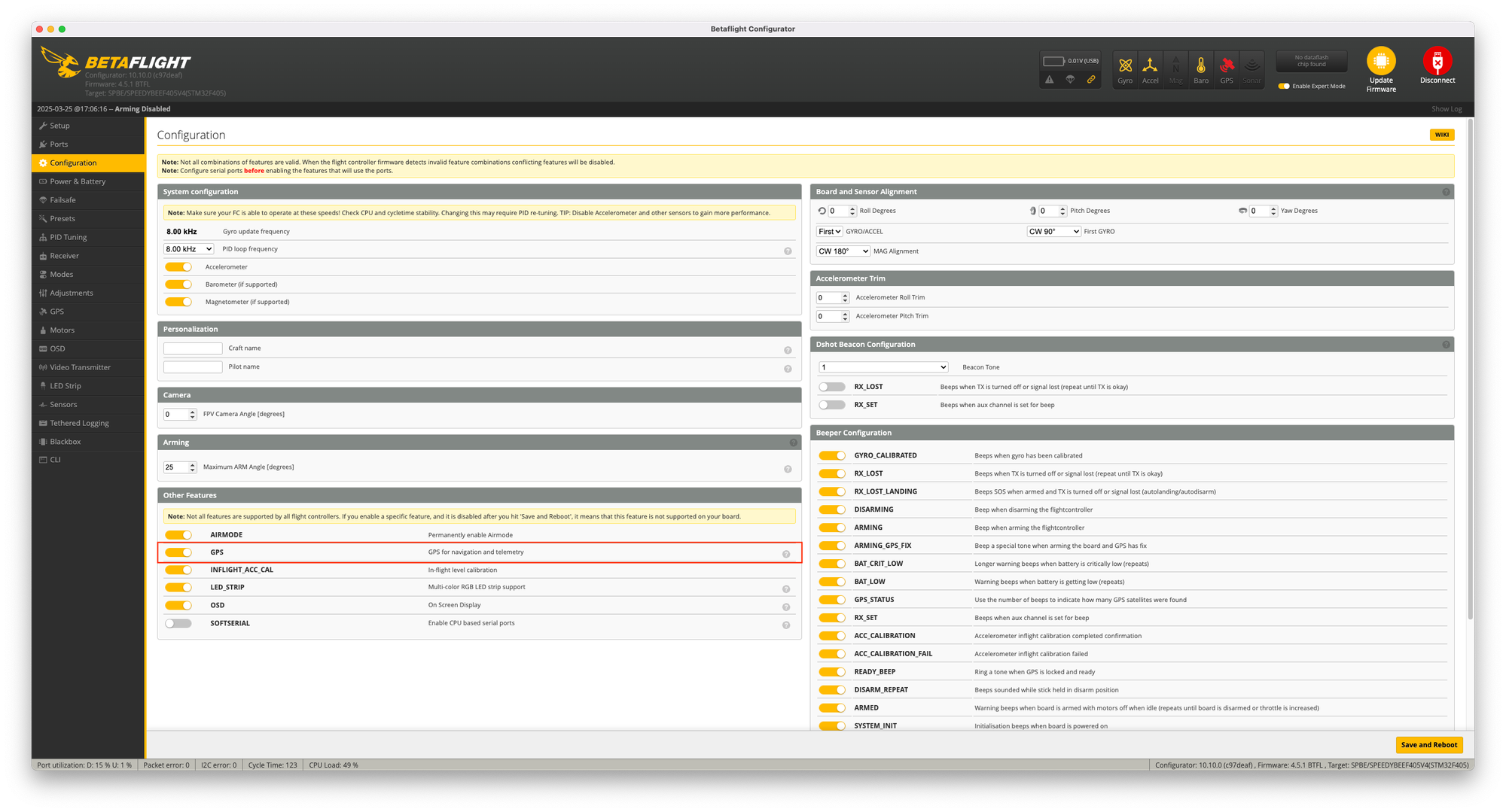
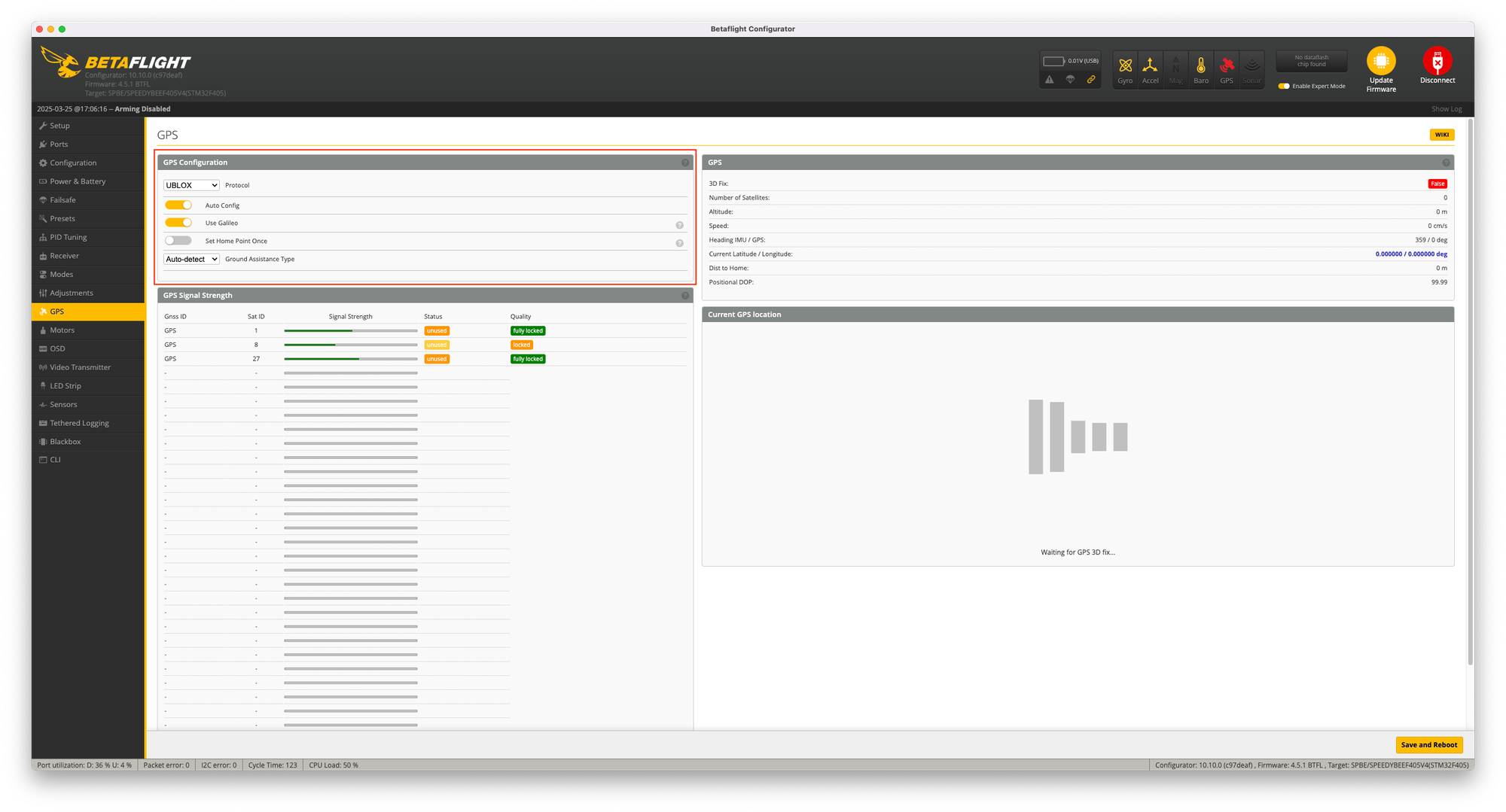
Paramètres GPS Betaflight
Pour mes configurations freestyle et racing avec capacité de sauvetage GPS, je choisis par défaut la configuration suivante :
Sujets GNSS avancés
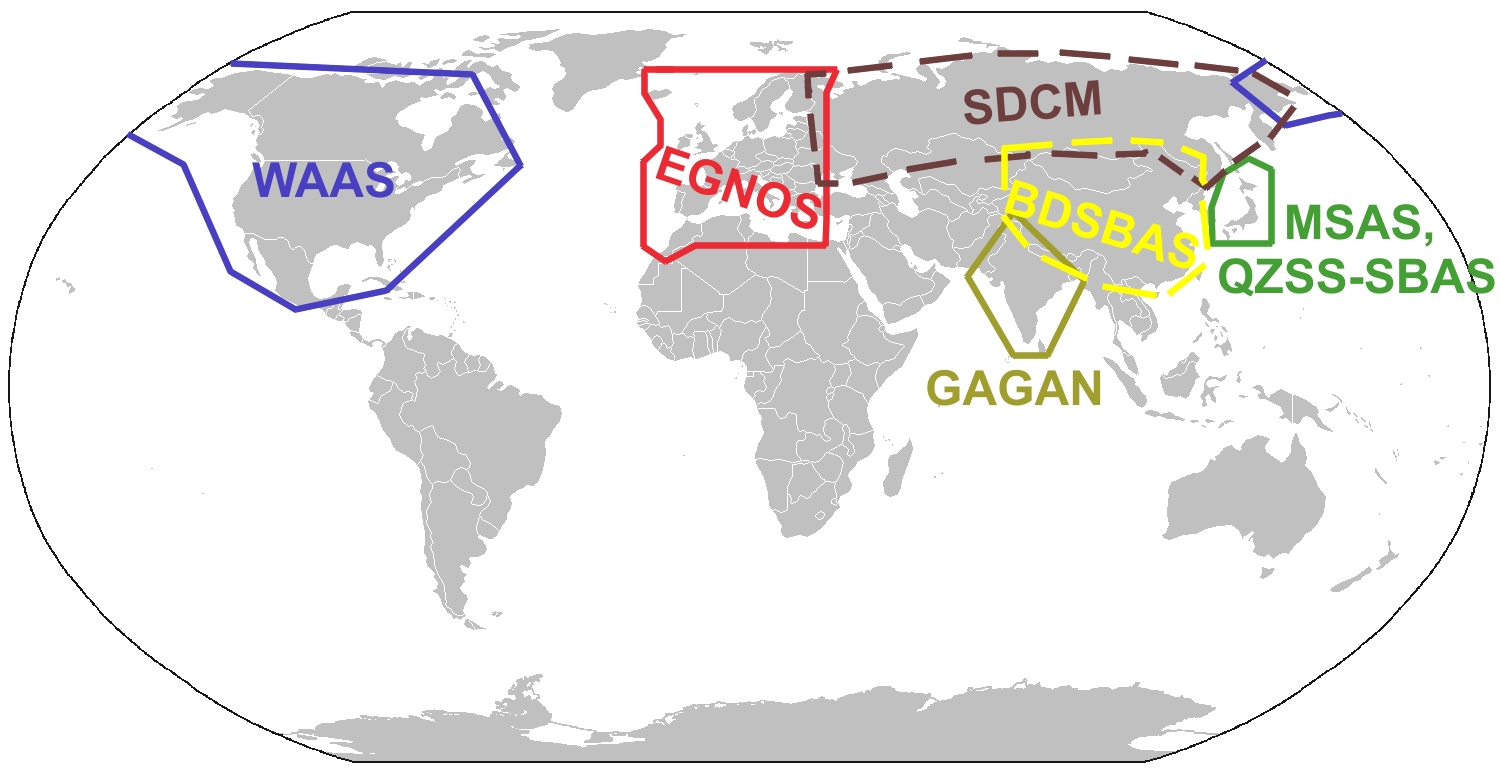
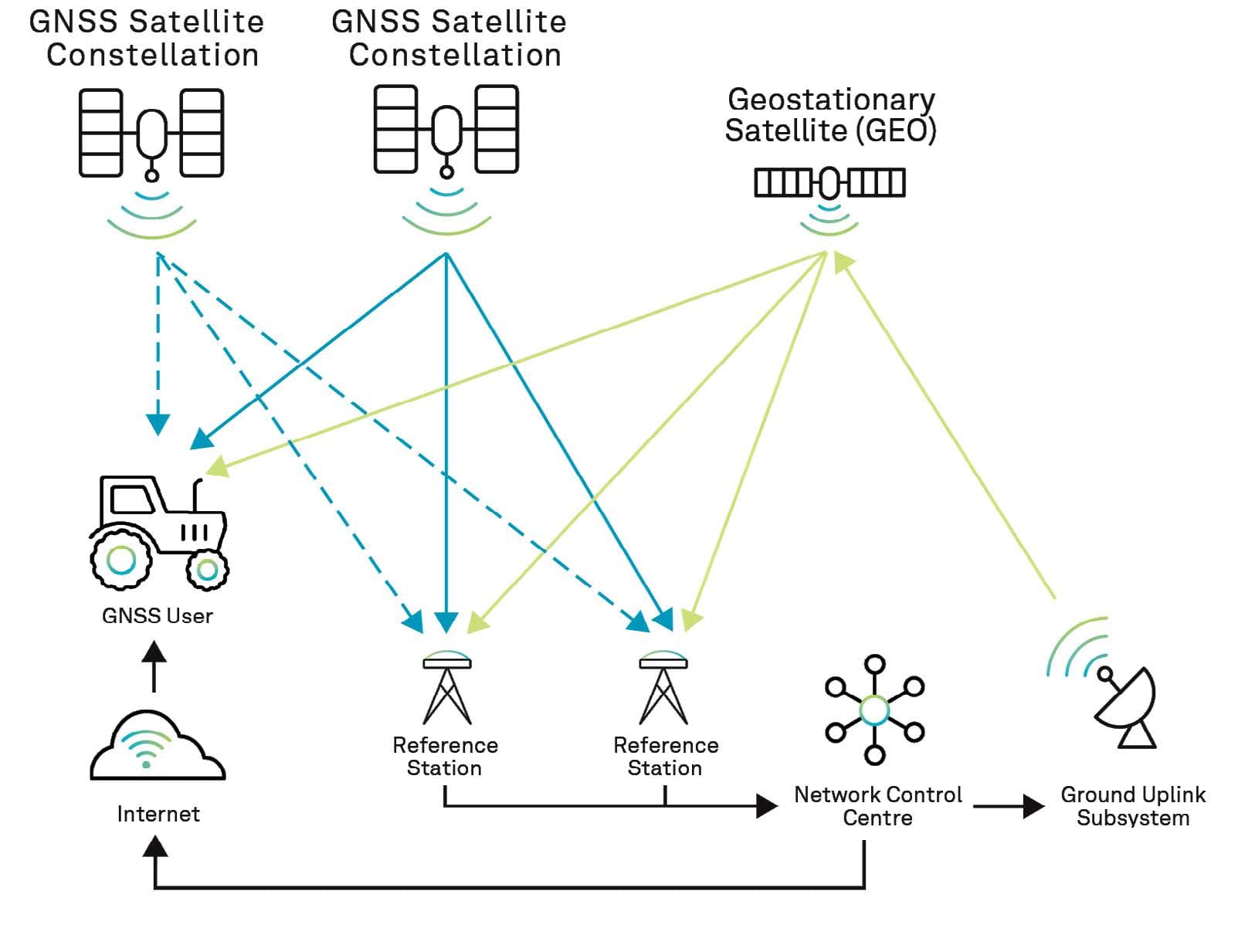
SBAS (Système d'augmentation basé sur des satellites)
Les systèmes régionaux qui améliorent la précision GNSS ont été un avantage significatif dans mon expérience :
• WAAS (Wide Area Augmentation System) : Amérique du Nord
• EGNOS (European Geostationary Navigation Overlay Service) : Europe
• MSAS (Multi-functional Satellite Augmentation System) : Japon
• GAGAN (GPS Aided GEO Augmented Navigation) : Inde
• SDCM (System for Differential Corrections and Monitoring) : Russie
Ces systèmes fournissent des données de correction qui peuvent améliorer la précision de 3-5m à 1-2m. J'ai remarqué les avantages le plus clairement en volant en Europe avec EGNOS et en Amérique du Nord avec WAAS. Les corrections sont particulièrement précieuses pour la précision de l'altitude, qui est généralement la dimension la plus faible dans le positionnement GNSS.
Au-delà des améliorations de précision, les systèmes SBAS fournissent également une surveillance de l'intégrité, qui aide à identifier les signaux satellites peu fiables. C'est précieux pour les applications critiques en termes de sécurité où savoir quand ne pas faire confiance aux données de position est aussi important que d'avoir des données précises.
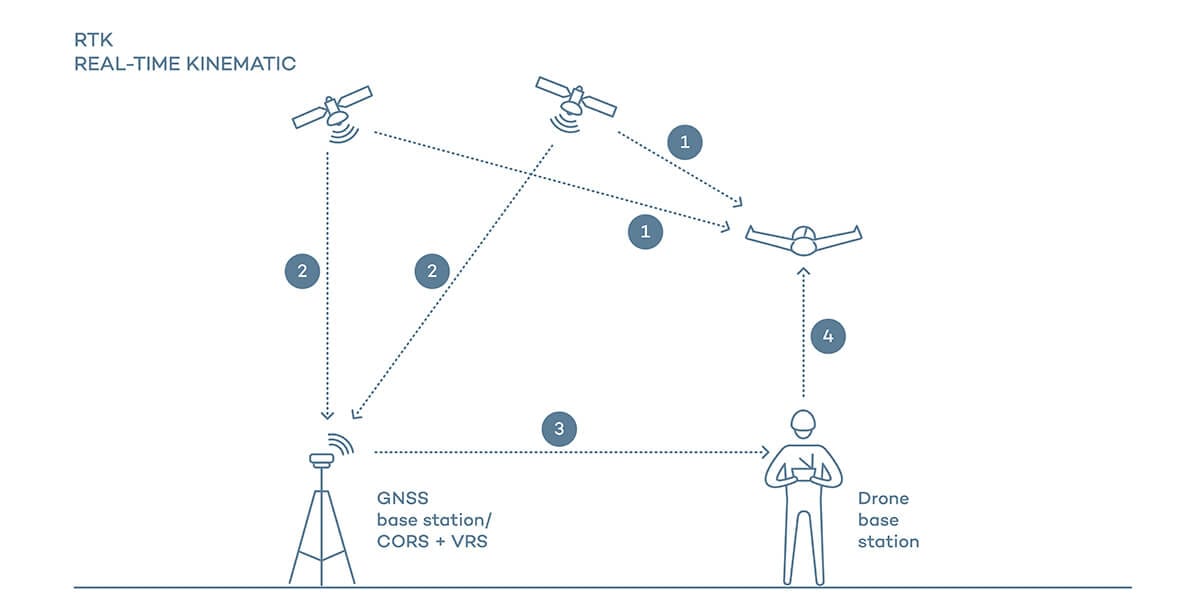
RTK (Cinématique en temps réel)
Pour mes drones de cartographie et de relevé, le RTK a été transformateur :
Principe de base : Mesures de phase de la porteuse pour une précision centimétrique
Composants :
- Station de base : Référence de position fixe
- Rover : Récepteur mobile sur le drone
- Lien de correction : Connexion radio ou réseau
Précision : Généralement 1-3cm dans des conditions idéales
La mise en place de RTK nécessite plus de composants et de complexité, mais les résultats en valent la peine pour les applications de précision. J'utilise une connexion 4G/LTE pour recevoir les corrections NTRIP de services publics, ce qui élimine le besoin d'une station de base locale.
Les principales limitations que j'ai rencontrées avec RTK sont :
- Nécessite une vue dégagée du ciel
- Station de base à moins de ~10km (bien que le RTK réseau étende cela)
- Lien de données de correction fiable
- Période d'initialisation requise
Pour la plupart des vols de loisir, RTK est excessif. Mais pour la cartographie, l'arpentage, l'agriculture de précision et l'atterrissage automatisé, c'est inestimable. La capacité de revenir à plusieurs reprises exactement à la même position avec une précision centimétrique ouvre de nombreuses applications professionnelles.
PPP (Positionnement Ponctuel Précis)
Pour certains de mes vols d'exploration à distance où RTK n'est pas pratique :
• Principe de base : Utilise des données précises d'orbite et d'horloge des satellites
• Avantage : Pas de station de base requise
• Inconvénient : Temps de convergence plus long (minutes à heures)
• Précision : Niveau décimétrique (10-30cm)
PPP est moins courant dans les applications de drones en raison des exigences de temps de convergence, mais c'est une technique précieuse pour certaines applications spécialisées. Je l'ai utilisé pour des missions de cartographie de longue durée où le drone a le temps d'atteindre la convergence avant de commencer le schéma de cartographie.
Réception Multi-Bande
Les derniers modules haut de gamme comme le ZED-F9P utilisent plusieurs bandes de fréquences :
• Mono-fréquence : La plupart des GNSS de drones (L1/E1/B1)
• Double fréquence : Modules haut de gamme (L1+L5/E5/B2)
• Avantages :
- Meilleure atténuation des multi-trajets
- Initialisation RTK plus rapide
- Précision améliorée
- Meilleures performances dans des environnements difficiles
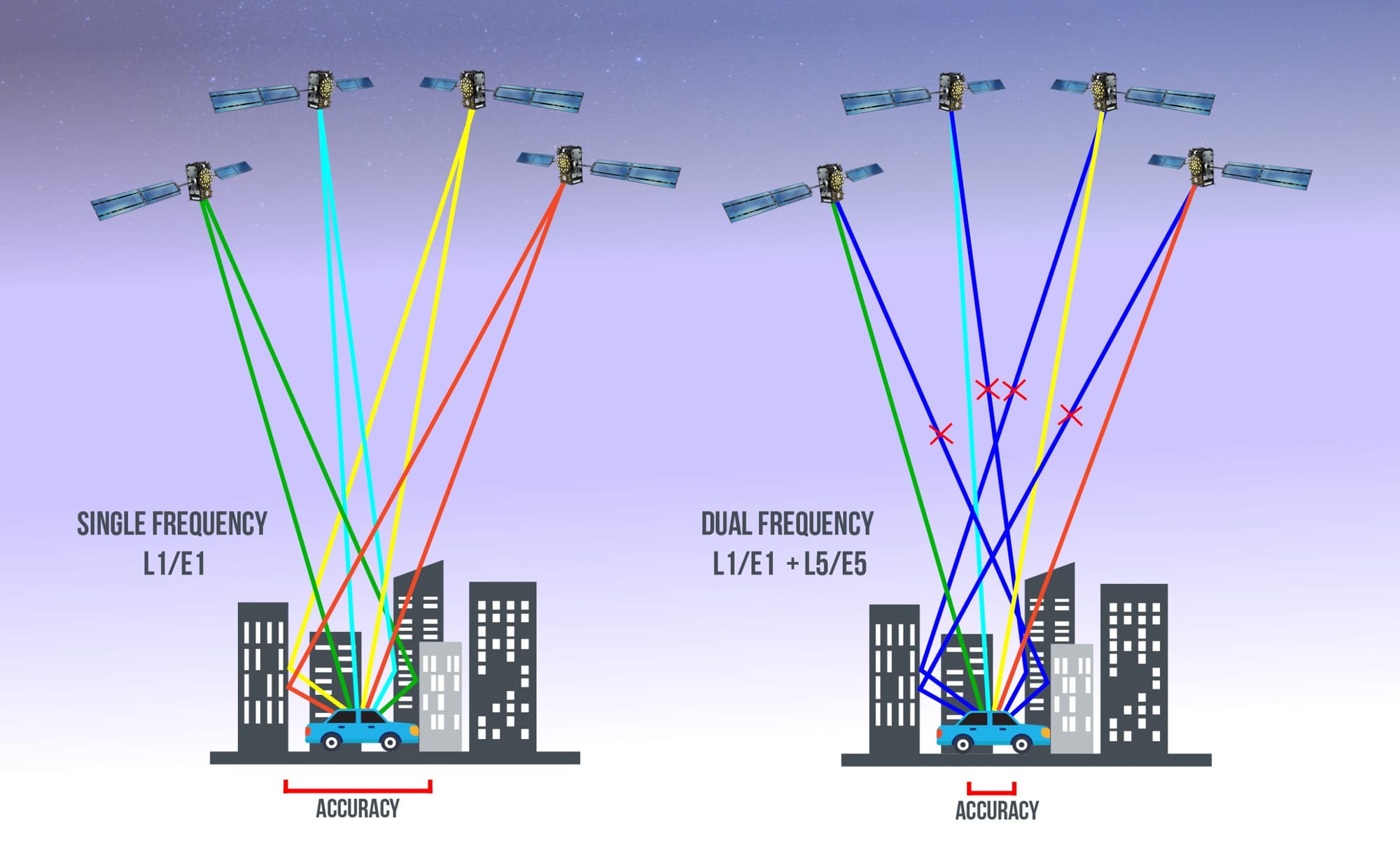
La différence est notable - mon drone d'arpentage équipé de F9P obtient une correction RTK beaucoup plus rapidement que les anciens systèmes RTK mono-fréquence que j'ai utilisés. L'atténuation des multi-trajets est particulièrement précieuse dans des environnements avec des surfaces réfléchissantes comme l'eau ou les bâtiments.
Dépannage des problèmes GNSS
Au fil des années, j'ai rencontré et résolu d'innombrables problèmes GNSS. Voici les problèmes les plus courants et leurs solutions :
Mauvaise réception satellite
Symptômes :
- Peu de satellites acquis
- Valeurs HDOP élevées
- Données de position incohérentes
- Perte fréquente de GNSS
Solutions :
- Améliorer le placement de l'antenne - j'ai constaté des améliorations spectaculaires simplement en éloignant l'antenne de quelques centimètres des sources d'interférences.
- S'éloigner des sources d'interférences - en particulier les émetteurs vidéo et les fils d'alimentation.
- Utiliser un module multi-constellation - plus de satellites signifie plus de chances d'une bonne réception.
- Vérifier les obstructions physiques - la fibre de carbone est particulièrement problématique.
- Vérifier la connexion de l'antenne - des connexions lâches peuvent causer des problèmes intermittents.
J'ai passé des heures à dépanner une mauvaise réception sur une nouvelle construction, pour découvrir que la plaque supérieure en fibre de carbone bloquait les signaux. Ajouter un support de 15 mm pour élever le module a résolu le problème instantanément.
Acquisition lente des satellites
Symptômes :
- Long délai jusqu'à la première correction
- Verrouillage GPS retardé avant le vol
Solutions :
- Mettre à jour vers un module plus récent - chaque génération a des temps d'acquisition améliorés.
- Activer toutes les constellations disponibles - plus de satellites signifie une acquisition plus rapide.
- Définir le modèle dynamique approprié - utiliser "Piéton" pour un drone peut ralentir l'acquisition.
- S'assurer que la tension de la batterie est stable - les chutes de tension peuvent réinitialiser le processus d'acquisition.
- Envisager une antenne externe pour les environnements difficiles - parfois l'antenne intégrée ne suffit pas.
J'ai constaté que garder le récepteur alimenté entre les vols (en utilisant une petite batterie) peut réduire considérablement le temps d'acquisition en maintenant les données d'éphémérides.
Dérive de position
Symptômes :
- Le maintien de position se déplace progressivement
- RTH atterrit loin du point de décollage
- Les waypoints ne sont pas suivis avec précision
Solutions :
- Attendez une meilleure couverture satellite (HDOP inférieur) – J'attends toujours un HDOP < 2.0 avant de faire confiance aux données de position.
- Augmentez le nombre minimum de satellites requis – plus de satellites signifie généralement une meilleure précision.
- Activez SBAS si disponible – les corrections peuvent réduire considérablement la dérive.
- Vérifiez les interférences magnétiques affectant le compas – les problèmes de compas se font souvent passer pour des problèmes GNSS.
- Tenez compte des facteurs environnementaux (arbres, bâtiments) – les réflexions multiples peuvent causer des erreurs de position.
Lors d'une mission de cartographie, j'ai remarqué que le drone dérivait progressivement hors de sa trajectoire. Le problème s'est avéré être un compas mal calibré affecté par les moteurs. Recalibrer le compas loin de tout objet métallique a résolu le problème.
Défaillances GNSS
Symptômes :
- Sauts de position soudains
- Comportement de navigation erratique
- Perte temporaire de position
Solutions :
- Ajustez les paramètres de filtrage GNSS – la plupart des firmwares ont des réglages pour lisser les données GNSS.
- Augmentez le lissage de navigation – cela peut filtrer les défaillances momentanées.
- Vérifiez les interférences électriques intermittentes – les alimentations à découpage sont souvent en cause.
- Mettez à jour vers le dernier firmware – de nombreux problèmes GNSS sont corrigés dans les mises à jour.
- Envisagez une mise à niveau matérielle vers une nouvelle génération – les nouveaux récepteurs rejettent mieux les signaux parasites.
J'ai constaté que l'ajout d'un condensateur à l'entrée d'alimentation du module GNSS peut aider à réduire les défaillances causées par le bruit électrique du système d'alimentation.
Outils de diagnostic
U-Center (logiciel de configuration Ublox)
C'est mon outil de prédilection pour diagnostiquer les problèmes GNSS :
• Objectif : Configurer et surveiller les récepteurs GNSS Ublox
• Fonctionnalités :
- Suivi des satellites en temps réel
- Surveillance de la qualité du signal
- Ajustement des paramètres de configuration
- Mises à jour du firmware
- Analyse des performances
Je me connecte via USB ou UART passthrough depuis le contrôleur de vol. La vue de la force du signal satellite est particulièrement utile pour identifier les problèmes d'interférence – vous verrez tous les satellites avec une force de signal réduite plutôt que seulement certains.
https://www.u-blox.com/en/product/u-center-fr/
Visionneuses GNSS
Intégrées à la plupart des logiciels de contrôleur de vol :
• Objectif : Visualiser les performances GNSS
• Exemples :
- Mission Planner GPS Status
- Écran de configuration GPS INAV
- Onglet GPS Betaflight
Je vérifie toujours ceux-ci avant les vols pour vérifier une bonne réception. Les métriques clés que je surveille sont :
- Nombre de satellites (plus c'est mieux, j'aime en voir 14+ pour les missions critiques)
- Valeur HDOP (plus c'est bas, mieux c'est, je vise < 1,5)
- Type de correction (3D est requis pour la navigation, RTK flottant/fixe pour les applications de précision)
- Force du signal (indique la qualité de réception et les interférences potentielles)
Analyse Blackbox
Pour le diagnostic post-vol :
• Objectif : Examiner les performances GNSS pendant le vol
• Outils :
- Blackbox Explorer
- Flight Review (ArduPilot)
J'ai identifié de nombreux problèmes subtils grâce à l'analyse des boîtes noires qui n'étaient pas apparents pendant le vol. Les données clés à examiner comprennent :
- Précision de la position au fil du temps
- Dérive du point d'origine
- Performance de navigation
- Qualité du signal GNSS
La comparaison des données GNSS avec d'autres capteurs (comme les accéléromètres) peut révéler des problèmes d'intégration qui affectent les performances de navigation.
Tendances futures de la technologie GNSS
Sur la base de mon expérience avec les derniers modules et développements de l'industrie, voici où je vois la technologie GNSS se diriger :
Avancées matérielles
• Standard multibande : La double fréquence devient plus courante dans les appareils grand public. Je m'attends à ce que cela atteigne les drones de loisir d'ici 2 à 3 ans, apportant une meilleure précision et fiabilité.
• Miniaturisation : Des modules plus petits et plus légers avec de meilleures performances. La tendance à l'intégration se poursuivra, avec GNSS, boussole, baromètre et même IMU dans des packages uniques.
• Intégration : GNSS, boussole, baromètre et radio combinés. Je vois déjà cela dans certains modules haut de gamme, et cela simplifie le câblage et réduit le poids.
• Efficacité énergétique : Autonomie prolongée pour les missions longue portée. Le mode Super-E du M10 n'est que le début – les futurs modules réduiront probablement encore plus la consommation d'énergie.
• Technologie d'antenne : Meilleure réception dans des packages plus petits. La conception d'antennes continue de progresser, avec de meilleures performances dans des formats plus compacts.
Innovations logicielles
• Algorithmes améliorés : Meilleure estimation et filtrage de la position. Les approches d'apprentissage automatique commencent à apparaître dans les systèmes commerciaux et atteindront finalement les drones de loisir.
• Positionnement amélioré par l'IA : Apprentissage automatique pour les environnements difficiles. J'ai vu des recherches préliminaires utilisant des réseaux de neurones pour améliorer le positionnement dans les canyons urbains.
• Fusion de capteurs : Intégration plus étroite avec d'autres capteurs de navigation. Les frontières entre GNSS, positionnement visuel et navigation inertielle continueront de s'estomper.
• Surveillance de l'intégrité : Meilleure détection des signaux peu fiables. À mesure que les drones deviennent plus autonomes, savoir quand ne pas faire confiance aux données GNSS devient de plus en plus important.
• Configuration simplifiée : Configuration plus intuitive. La complexité de la configuration GNSS a été un obstacle pour de nombreux utilisateurs, mais les nouveaux systèmes deviennent plus plug-and-play.
Technologies émergentes
• Navigation par satellite LEO : Constellations en orbite terrestre basse pour une précision améliorée. Des systèmes comme Starlink pourraient potentiellement offrir des services de navigation avec de meilleures performances urbaines que le GNSS traditionnel.
• Navigation assistée par vision : Caméras améliorant le GNSS dans des environnements difficiles. J'utilise déjà cela sur certaines constructions, où les capteurs de flux optique complètent le GNSS pour un positionnement plus robuste.
• Capteurs quantiques : Technologie de positionnement de nouvelle génération. Encore dans les laboratoires de recherche, mais les capteurs quantiques promettent des améliorations spectaculaires de la précision sans références externes.
• Authentification avancée : Protection contre les attaques par leurre. À mesure que le leurre GNSS devient plus courant, les fonctions d'authentification deviendront plus importantes pour les applications critiques.
• Positionnement en maillage : Les drones partagent des données de position en essaims. J'ai expérimenté cela dans des configurations multi-drones, où les drones peuvent utiliser un positionnement relatif pour améliorer leurs estimations de position absolue.
FAQ : Questions courantes sur la technologie GNSS des drones
Quelle est la différence entre GPS, GNSS et GLONASS ?
C'est l'une des questions les plus fréquentes que l'on me pose lorsque j'aide les gens avec leurs constructions :
• GPS (Global Positioning System) : Le système de navigation par satellite américain exploité par la US Space Force. C'est le système original et le plus largement utilisé.
• GNSS (Global Navigation Satellite System) : Le terme générique pour tous les systèmes de navigation par satellite, y compris GPS, GLONASS, Galileo, BeiDou et les systèmes régionaux. Les récepteurs modernes utilisent généralement plusieurs constellations GNSS simultanément.
• GLONASS : Le système de navigation par satellite de la Russie, similaire au GPS mais avec des caractéristiques orbitales et une structure de signal différentes. C'est le deuxième plus ancien système global et il offre une bonne couverture aux latitudes élevées.
Lorsque quelqu'un fait référence à un "module GPS" pour un drone, il parle généralement d'un récepteur GNSS qui peut utiliser plusieurs constellations de satellites, pas seulement le système GPS américain. Je clarifie toujours ce point lorsque j'aide les nouveaux venus pour éviter toute confusion.
Vaut-il la peine de passer à un module GNSS de nouvelle génération ?
D'après mon expérience de la mise à niveau de nombreux drones :
• M6/M7 à M8 : Amélioration significative du temps d'acquisition, de la prise en charge des constellations et de la précision. Vaut vraiment la peine d'être mis à niveau.
• M8 à M9 : Améliorations notables de la précision, de la fréquence de mise à jour et des performances multi-constellations. Vaut la peine d'être mis à niveau pour une utilisation de navigation sérieuse.
• M9 à M10 : Améliorations progressives de la sensibilité, de la consommation d'énergie et des performances en milieu urbain. À envisager pour des applications spécialisées ou si l'efficacité énergétique est cruciale.
Pour la plupart des pilotes amateurs, un module M8N est encore adéquat pour la navigation de base, tandis qu'un M9N offre d'excellentes performances pour des applications plus exigeantes. La série M10 ou F9P est principalement bénéfique pour des utilisations professionnelles ou spécialisées.
J'ai mis à niveau mon drone d'exploration longue portée de M8N à M9N et j'ai remarqué des améliorations immédiates du temps d'acquisition et de la stabilité de position. Pour mes quads freestyle qui n'utilisent le GPS que pour le retour au point de départ, j'ai gardé les modules M8N car ils sont parfaitement adéquats pour cet usage.
De combien de satellites ai-je besoin pour une navigation fiable ?
D'après mon expérience avec des dizaines de drones équipés de GNSS :
• Minimum fonctionnel : 5-6 satellites
• Minimum recommandé : 8 satellites
• Bonnes performances : 10-14 satellites
• Excellentes performances : 15+ satellites
Cependant, le nombre de satellites n'est qu'une partie de l'équation. Le HDOP (Dilution Horizontale de Précision) est tout aussi important - une valeur HDOP plus faible (idéalement inférieure à 2,0) indique une meilleure géométrie des satellites et un positionnement plus précis.
J'ai eu des situations avec plus de 20 satellites mais un mauvais HDOP en raison de tous les satellites regroupés dans une partie du ciel, entraînant un positionnement médiocre. À l'inverse, j'ai eu d'excellentes performances avec seulement 9 satellites bien répartis dans le ciel, donnant un faible HDOP.
Les récepteurs multi-constellations modernes peuvent souvent voir plus de 20 satellites dans des conditions de ciel dégagé, offrant une excellente redondance et précision.
L'utilisation de plusieurs constellations vide-t-elle la batterie plus rapidement ?
Une question que je reçois souvent de la part des pilotes soucieux de la durée de vol :
L'utilisation de plusieurs constellations GNSS augmente légèrement la consommation d'énergie, mais l'impact est relativement faible :
• GPS uniquement : Consommation d'énergie de base
• GPS+GLONASS : ~10-15% de puissance en plus par rapport au GPS seul
• GPS+GLONASS+Galileo+BeiDou : ~20-30% de puissance en plus par rapport au GPS seul
Pour mettre les choses en contexte, un module M8N typique consomme environ 25mA, tandis qu'une configuration multi-constellations complète pourrait consommer 30-35mA. Sur un drone avec un appel de courant de 5-20A pendant le vol, cette différence est négligeable (moins de 0,5% de la consommation totale d'énergie).
J'ai mesuré la différence sur mes constructions longue portée, et l'impact sur la durée de vol est imperceptible. Les avantages d'une meilleure précision, d'une acquisition plus rapide et d'une meilleure fiabilité l'emportent presque toujours sur l'impact énergétique minimal.
Quelle constellation GNSS est la plus précise ?
D'après mes tests dans différentes régions :
• GPS : Généralement une précision de 3 à 5 m, très cohérent et fiable
• GLONASS : Typiquement une précision de 4 à 7 m, meilleure aux latitudes élevées
• Galileo : Précision de 1 à 3 m, conçu pour la précision civile
• BeiDou : 3-5m globalement, 2-3m dans la région Asie-Pacifique
Cependant, les meilleures performances proviennent de l'utilisation combinée de plusieurs constellations, car elles se complètent mutuellement en termes de forces et de faiblesses. Un récepteur moderne utilisant toutes les constellations disponibles atteindra généralement une précision de 1 à 3 m dans de bonnes conditions, meilleure que n'importe quelle constellation seule.
D'après mon expérience, Galileo offre actuellement la meilleure précision civile parmi les systèmes mondiaux, mais son avantage est plus notable lorsqu'il est combiné avec d'autres constellations.
Puis-je utiliser le RTK sur un drone ordinaire ?
Oui, le RTK peut être mis en œuvre sur des drones ordinaires avec certaines considérations :
Exigences :
- Module GNSS compatible RTK (comme ZED-F9P)
- Contrôleur de vol avec prise en charge RTK (ArduPilot, INAV avec limitations)
- Station de base ou service NTRIP pour les corrections
- Liaison de données pour la transmission des corrections (radio télémétrie, 4G/LTE)
Considérations pratiques :
- Coût supplémentaire (150-300$ pour le matériel RTK)
- Complexité accrue de la configuration
- Besoin d'une source de données de correction
- Avantage limité pour le vol FPV standard
J'ai mis en œuvre le RTK sur plusieurs constructions, et bien que la précision au niveau du centimètre soit impressionnante, elle est généralement inutile pour le vol récréatif, la course ou le freestyle. Là où le RTK a du sens, c'est pour les applications de cartographie, de relevé, d'agriculture de précision et d'atterrissage automatisé.
Pour mon drone de relevé, j'utilise un module ZED-F9P avec une connexion 4G pour recevoir les corrections NTRIP d'un service public. La configuration était plus complexe qu'une implémentation GNSS standard, mais les résultats en valent la peine pour des applications professionnelles.
Comment les facteurs environnementaux affectent-ils les performances GNSS ?
Divers facteurs environnementaux peuvent avoir un impact significatif sur la réception GNSS :
• Canyons urbains : Les bâtiments bloquent et réfléchissent les signaux, réduisant la précision de 5 à 10 fois. J'ai constaté des erreurs de position de plus de 20 mètres dans des environnements urbains denses avec des récepteurs à constellation unique.
• Feuillage dense : Les arbres peuvent atténuer les signaux de 10 à 30 dB, réduisant la visibilité des satellites. J'ai constaté que voler au-dessus de la canopée est souvent nécessaire pour une navigation fiable dans les zones boisées.
• Plans d'eau : Les réflexions peuvent provoquer des erreurs de trajet multiple. Lors de la cartographie des côtes, j'ai remarqué des sauts de position près du bord de l'eau en raison des réflexions du signal.
• Météo : De fortes pluies peuvent légèrement dégrader les signaux (atténuation de 1 à 2 dB). D'après mon expérience, cela cause rarement des problèmes de performance notables.
• Conditions ionosphériques : L'activité solaire peut affecter la précision. Pendant les tempêtes solaires, j'ai observé des performances légèrement dégradées, bien que les récepteurs modernes gèrent bien cela.
• Sources de brouillage : Les interférences RF à proximité peuvent bloquer la réception. Une fois, un drone a refusé d'obtenir un verrouillage de position jusqu'à ce que je réalise que mon système de microphone sans fil causait des interférences.
Les récepteurs multi-constellations aident à atténuer ces problèmes en fournissant plus de satellites et de fréquences avec lesquels travailler, mais aucun système GNSS n'est complètement à l'abri des défis environnementaux. Pour les applications critiques dans des environnements difficiles, j'envisage toujours des technologies de navigation complémentaires comme le flux optique ou le positionnement visuel.
Voici le contenu traduit en français avec la structure HTML et les liens préservés :
Conclusion
La technologie GNSS a considérablement évolué depuis ses origines militaires pour devenir un élément essentiel des systèmes de drones modernes. Le passage des récepteurs GPS à constellation unique aux récepteurs GNSS à constellation multiple a considérablement amélioré les performances de navigation, la fiabilité et les capacités.
Comprendre les différences entre GPS, GLONASS, Galileo et BeiDou, ainsi que l'évolution de la technologie des récepteurs, des premiers modules aux dernières générations M10 et F9P, permet aux pilotes de drones de prendre des décisions éclairées sur leurs systèmes de navigation. Que vous voliez pour le loisir, la course, le freestyle ou des applications professionnelles, le choix de la technologie GNSS appropriée et sa mise en œuvre correcte peuvent améliorer les capacités et la sécurité de votre drone.
Alors que la technologie GNSS continue d'évoluer avec la réception multibande, l'amélioration des algorithmes et l'intégration avec d'autres capteurs, nous pouvons nous attendre à de meilleures performances dans des environnements difficiles et à un positionnement plus précis pour des applications spécialisées. En vous tenant informé de ces développements et en comprenant comment optimiser votre configuration actuelle, vous pouvez vous assurer que votre système de navigation par drone fonctionne au mieux.


