Tecnología GNSS: Una Guía Completa para una Navegación Segura
Si bien "GPS" se usa a menudo como un término genérico para la navegación por satélite en drones, los sistemas de navegación modernos en realidad aprovechan múltiples constelaciones de satélites conocidas colectivamente como GNSS (Sistemas Globales de Navegación por Satélite). Después de años de construir y volar drones con varios sistemas de navegación, he visto de primera mano cómo una implementación adecuada de GNSS puede marcar la diferencia entre un dron que regresa a casa de manera confiable y uno que se convierte en un costoso adorno de árbol. Esta guía completa explora los diferentes sistemas de navegación por satélite, sus características, la evolución de los módulos receptores GNSS y cómo estas tecnologías mejoran las capacidades de navegación de los drones.
Introducción a la tecnología GNSS
GNSS (Sistema Global de Navegación por Satélite) se refiere a la constelación de satélites que proporcionan señales desde el espacio que transmiten datos de posicionamiento y temporización a los receptores GNSS. Estos receptores luego usan estos datos para determinar la ubicación. Si bien el GPS es el GNSS más conocido, existen varios otros sistemas y los receptores modernos a menudo usan múltiples sistemas simultáneamente para mejorar el rendimiento.

Todavía recuerdo mi primer dron equipado con GPS en 2020. Usaba un módulo primitivo Ublox LEA-6H que tardaba casi dos minutos en obtener un bloqueo de posición y se desviaba varios metros durante un vuelo estacionario. Avancemos rápidamente hasta hoy, y estoy volando con receptores de múltiples constelaciones que se bloquean en segundos y mantienen la posición con una precisión notable. La evolución ha sido nada menos que revolucionaria para las capacidades de los drones.
La evolución de la navegación por satélite
La navegación por satélite ha evolucionado dramáticamente desde sus inicios:
• Orígenes militares (décadas de 1970 y 1980): GPS desarrollado por el Departamento de Defensa de EE. UU. para aplicaciones militares. La tecnología estaba estrictamente controlada y limitada en aplicaciones civiles.
• Acceso civil (década de 1990): La política de Disponibilidad Selectiva hizo que el GPS fuera deliberadamente menos preciso para uso civil. ¡Las primeras unidades GPS tenían errores de más de 100 metros!
• Acceso civil completo (década de 2000): La eliminación de la Disponibilidad Selectiva permitió aplicaciones civiles precisas. Este fue un cambio de juego que abrió la puerta para una navegación confiable de drones.
• Era de múltiples constelaciones (década de 2010): El desarrollo y despliegue de sistemas alternativos como GLONASS, Galileo y BeiDou crearon redundancia y mejoraron el rendimiento. Noté una mejora significativa en la confiabilidad de navegación de mis drones cuando actualicé de módulos solo GPS a GPS+GLONASS alrededor de 2022.
• Integración moderna (presente): Los receptores de múltiples constelaciones se han convertido en estándar en dispositivos de consumo. Hoy en día, incluso los drones económicos pueden acceder a más de 30 satélites simultáneamente para un posicionamiento a nivel de centímetros.
Principios básicos de la navegación por satélite
Todos los sistemas GNSS operan con principios similares, aunque comprender estos fundamentos me ha ayudado a solucionar innumerables problemas de navegación a lo largo de los años:
- Constelación de satélites: Una red de satélites que orbitan la Tierra transmite señales precisas de tiempo y posición. Cuantos más satélites pueda "ver" su receptor, mejor será la precisión de su posición.
- Transmisión de señal: Estos satélites transmiten información precisa de tiempo y posición en frecuencias de radio específicas. Las señales son increíblemente débiles cuando llegan a la Tierra, aproximadamente la misma potencia que una bombilla de 50 vatios vista desde 12,000 millas de distancia.
- Trilateración: El receptor de su dron calcula la posición midiendo los retrasos de tiempo de múltiples satélites. Me gusta explicar esto como el receptor preguntando: "¿A qué distancia estoy del satélite A? ¿A qué distancia del satélite B?" y así sucesivamente, luego determina la única posición posible que satisface todas esas distancias.
- Requisitos mínimos: Necesita al menos 4 satélites para el posicionamiento 3D (latitud, longitud, altitud). He aprendido por experiencia que si bien 4 satélites funcionarán, realmente desea 8 o más para una navegación confiable del dron.
- Corrección de errores: Varias técnicas mejoran la precisión al tener en cuenta los retrasos atmosféricos, los errores de reloj y otros factores. Los receptores modernos son notablemente buenos en esto, por lo que los drones de hoy pueden mantener la posición con tanta precisión.
Métricas clave de rendimiento
Varios factores determinan el rendimiento de GNSS, y comprender estos me ha ayudado a elegir los módulos adecuados para diferentes aplicaciones:
• Precisión: Qué tan cerca está la posición medida de la posición real. Para la navegación estándar de drones, generalmente es suficiente una precisión de 2-3 metros, pero para aplicaciones de mapeo o precisión, es posible que necesite una precisión a nivel de centímetros.
• Disponibilidad: El porcentaje de tiempo que el servicio es utilizable. He descubierto que los receptores de múltiples constelaciones mejoran drásticamente esta métrica, especialmente en entornos desafiantes como áreas urbanas o bajo cobertura parcial de árboles.
• Continuidad: La capacidad de funcionar sin interrupción. Esto es fundamental para las misiones autónomas: una interrupción momentánea de GNSS durante un vuelo de largo alcance puede ser desastrosa.
• Integridad: Confianza en que el sistema proporciona información correcta. Los receptores modernos tienen algoritmos sofisticados para detectar y rechazar mediciones erróneas.
• Tiempo para la primera fijación (TTFF): Qué tan rápido se puede establecer una posición. Recuerdo los días de esperar varios minutos con receptores de gama baja para obtener un bloqueo de GPS antes del despegue; ahora, por lo general, son segundos con módulos modernos.
• Tasa de actualización: Con qué frecuencia se actualiza la posición. Para carreras o vuelo dinámico, las tasas de actualización más altas (10 Hz o más) proporcionan una navegación notablemente más suave.
Principales constelaciones GNSS
A lo largo de los años, he usado receptores que admiten varias combinaciones de estos sistemas, y cada uno tiene sus fortalezas y debilidades. Comprender sus diferencias me ha ayudado a optimizar mis drones para diferentes condiciones de vuelo.
GPS (Sistema de Posicionamiento Global)
El sistema de navegación por satélite original y más utilizado:
• País/Región: Estados Unidos
• Operación inicial: 1978 (limitada), Capacidad operativa completa en 1995
• Satélites: 31 satélites operativos (se requieren 24 para cobertura global)
• Características orbitales:
- Órbita terrestre media a aproximadamente 20,200 km
- 6 planos orbitales con 4 o más satélites cada uno
- Período orbital de 12 horas
• Frecuencias de señal:
- L1 (1575.42 MHz) - Frecuencia civil primaria
- L2 (1227.60 MHz) - Utilizado para aplicaciones militares y civiles avanzadas
- L5 (1176.45 MHz) - La frecuencia más nueva para aplicaciones de seguridad de la vida
• Precisión:
- Servicio de posicionamiento estándar (SPS): ~3-5 metros
- Servicio de posicionamiento preciso (PPS): ~<1 metro (militar)
GPS ha sido la columna vertebral de la navegación de drones durante años, y todavía lo considero el sistema más confiable en general. He volado en áreas remotas en todo el mundo y la cobertura GPS rara vez me ha defraudado. La madurez del sistema y el programa de modernización continua lo convierten en una opción confiable para la mayoría de las aplicaciones.
Una limitación del GPS es que su rendimiento puede degradarse en latitudes altas (cerca de los polos) debido a la configuración de la órbita de los satélites. Las señales también pueden verse afectadas por cañones urbanos y follaje denso, por lo que tener acceso a múltiples constelaciones es tan valioso.
GLONASS (Sistema Global de Navegación por Satélite)
La alternativa de Rusia al GPS se ha convertido en un complemento importante en los receptores modernos:
• País/Región: Rusia
• Operación Inicial: 1982 (limitada), Capacidad Operativa Completa restaurada en 2011
• Satélites: 24 satélites operativos
• Características Orbitales:
- Órbita Terrestre Media a aproximadamente 19,100 km
- 3 planos orbitales con 8 satélites cada uno
- Período orbital de 11 horas y 15 minutos
• Frecuencias de Señal:
- L1 (1598.0625 - 1605.375 MHz)
- L2 (1242.9375 - 1248.625 MHz)
- L3 (1202.025 MHz)
• Precisión:
- Precisión Estándar: ~4-7 metros
- Alta Precisión: ~<1 metro (militar)
Agregué por primera vez la capacidad GLONASS a mis drones alrededor de 2022, y la mejora fue inmediatamente notable. El sistema funciona particularmente bien en latitudes altas: he volado en el norte de Noruega, donde los satélites GLONASS a menudo eran más numerosos que los GPS en la vista de mi receptor.
GLONASS complementa extremadamente bien al GPS en receptores combinados. Si bien históricamente ha sido menos estable que el GPS (hubo un período en la década de 1990 en el que el sistema casi colapsó), el GLONASS moderno es muy confiable. He descubierto que tener ambos sistemas activos proporciona una excelente redundancia: si un sistema tiene problemas, el otro mantiene su dron navegando de manera segura.
Galileo
El GNSS controlado por civiles de la Unión Europea es el jugador principal más nuevo, y me ha impresionado su rendimiento:
• País/Región: Unión Europea
• Operación Inicial: 2016 (servicios iniciales), Capacidad Operativa Completa esperada para 2026
• Satélites: 28 planeados (24 operativos + 4 repuestos), 26 actualmente en órbita
• Características Orbitales:
- Órbita Terrestre Media a aproximadamente 23,222 km
- 3 planos orbitales con 8-10 satélites cada uno
- Período orbital de 14 horas
• Frecuencias de Señal:
- E1 (1575.42 MHz) - Igual que GPS L1
- E5a (1176.45 MHz) - Igual que GPS L5
- E5b (1207.14 MHz)
- E6 (1278.75 MHz)
• Precisión:
- Servicio Abierto: ~1-3 metros
- Servicio de Alta Precisión: ~20 cm
- Servicio Público Regulado: Encriptado para uso gubernamental
Cuando habilité Galileo en mis drones alrededor de 2022, era escéptico sobre si haría una diferencia notable. Para mi sorpresa, lo hizo, particularmente en entornos urbanos donde los edificios pueden bloquear algunas señales de satélite. Tener esos satélites Galileo adicionales a la vista proporcionó un rendimiento de navegación más consistente.
Galileo fue diseñado específicamente para aplicaciones civiles, con mayor precisión que el GPS estándar. Aprecio su monitoreo avanzado de integridad, que ayuda a detectar y mitigar señales poco confiables. El sistema también es totalmente interoperable con el GPS, lo que hace que la integración sea perfecta en los receptores modernos.
Si bien Galileo aún no está en plena capacidad operativa, ya está brindando un excelente servicio. La única limitación que he encontrado es que algunos receptores más antiguos no lo admiten, pero cualquier módulo GNSS moderno aprovechará al máximo estos satélites.
BeiDou (BDS)
El sistema de navegación por satélite de China ha evolucionado rápidamente para convertirse en un actor global:
• País/Región: China
• Operación Inicial: BeiDou-1 (2000), BeiDou-2 (2012), BeiDou-3 (2020)
• Satélites: 35 satélites operativos
• Características Orbitales:
- Combinación de Órbita Terrestre Media (27 satélites a 21,500 km)
- Órbita Geoestacionaria (5 satélites)
- Órbita Geosincrónica Inclinada (3 satélites)
• Frecuencias de Señal:
- B1I (1561.098 MHz)
- B1C (1575.42 MHz) - Igual que GPS L1
- B2a (1176.45 MHz) - Igual que GPS L5
- B2b (1207.14 MHz) - Igual que Galileo E5b
- B3I (1268.52 MHz)
• Precisión:
- Servicio Global: ~3-5 metros
- Servicio Regional: ~2-3 metros
Comencé a usar receptores compatibles con BeiDou alrededor de 2022, y el sistema ha demostrado ser una valiosa adición al ecosistema GNSS. El aspecto único de BeiDou es su diseño de constelación híbrida, con satélites en diferentes tipos de órbita. Esto proporciona una cobertura mejorada en la región de Asia-Pacífico, donde he notado un rendimiento particularmente sólido.
Una característica interesante de BeiDou que otros sistemas carecen es su capacidad de mensajería: el sistema puede transmitir mensajes de texto cortos, aunque esto no se usa típicamente en aplicaciones de drones. El servicio global completo se completó en 2020, lo que convierte a BeiDou en el sistema de navegación global completo más nuevo.
En mi experiencia, la integración de BeiDou ha sido perfecta en los receptores modernos, aunque la documentación en inglés era limitada en los primeros días. Hoy en día, es una parte estándar de los receptores de constelaciones múltiples y contribuye significativamente al rendimiento general de la navegación.
Sistemas Regionales
Además de los sistemas globales, existen varios sistemas GNSS regionales que pueden proporcionar beneficios adicionales en áreas específicas:
QZSS (Sistema de Satélite Cuasi-Cenital)
• País/Región: Japón
• Cobertura: Japón y región de Asia-Oceanía
• Satélites: 4 satélites operativos
QZSS está diseñado para funcionar en los cañones urbanos de Japón, con satélites en órbitas que los mantienen a grandes elevaciones sobre Japón. He visto a personas volando con receptores habilitados para QZSS en Tokio, y la mejora en el rendimiento urbano fue notable: las posiciones se mantuvieron más estables entre edificios altos que solo con las constelaciones globales.
NavIC (Navegación con Constelación India)
• País/Región: India
• Cobertura: India y región circundante (1,500 km)
• Satélites: 7 satélites operativos
NavIC está optimizado para el subcontinente indio. Si bien no lo he probado extensamente en persona, los colegas que vuelan en India informan buenos resultados cuando sus receptores admiten este sistema regional además de las constelaciones globales.
Beneficios de Constelaciones Múltiples para Drones
El uso simultáneo de múltiples constelaciones GNSS proporciona varias ventajas para las operaciones con drones. He experimentado estos beneficios de primera mano a medida que he actualizado mis sistemas de navegación a lo largo de los años.
Mejor Disponibilidad de Satélites
El beneficio más inmediato de los receptores de constelaciones múltiples es simplemente tener más satélites a la vista:
• Más Satélites Visibles: Las constelaciones combinadas proporcionan más de 30 satélites visibles en condiciones de cielo abierto. Regularmente veo de 20 a 25 satélites, en comparación con solo 8-10 con GPS solo.
• Rendimiento en Cañones Urbanos: Mejor posicionamiento en ciudades y áreas obstruidas. He volado entre edificios donde los receptores solo GPS perderían el bloqueo, pero los sistemas de constelaciones múltiples mantuvieron una navegación estable.
• Dilución de Precisión Geométrica Reducida (GDOP): Más satélites significa una mejor geometría y un posicionamiento más preciso. Esto se traduce en un vuelo estacionario y una navegación más precisos.
• Impacto práctico: Experimento menos pérdidas de señal GPS durante el vuelo, particularmente en entornos desafiantes. Esto ha salvado a varios de mis drones de potenciales fugas o choques.
Precisión mejorada
Múltiples constelaciones trabajando juntas mejoran la precisión general de posicionamiento:
• Promedio de errores: Múltiples sistemas ayudan a promediar los errores individuales de cada sistema. He observado que la retención de posición mejora de ±3 metros con solo GPS a una precisión de menos de un metro con receptores de múltiples constelaciones.
• Validación cruzada: Las posiciones de diferentes sistemas pueden validarse entre sí, rechazando valores atípicos. Esto ha eliminado los ocasionales "saltos" de posición que solía ver con receptores de una sola constelación.
• Precisión mejorada: Los cálculos de posición utilizando más satélites son generalmente más precisos. Esto es particularmente notable en la retención de altitud, que tiende a ser la dimensión más débil en el posicionamiento GNSS.
• Impacto práctico: Mis drones ahora mantienen una retención de posición y navegación más estables, haciendo que las misiones autónomas sean más confiables y las imágenes de video más suaves.
Redundancia del sistema
Quizás el beneficio más importante para las operaciones críticas de drones es la redundancia:
• Protección contra fallas: Si un sistema experimenta problemas, otros pueden compensar. Una vez volé a través de un área con interferencia GPS (probablemente no intencional), pero mi dron continuó navegando normalmente usando GLONASS y Galileo.
• Resistencia a las interferencias: Diferentes frecuencias hacen que la interferencia completa sea más difícil. Esto es particularmente importante para operaciones profesionales donde la integridad de la señal es crítica.
• Detección de suplantación: Las discrepancias entre los sistemas pueden indicar intentos de suplantación. Aunque es poco común, la suplantación de GPS es una preocupación creciente para las operaciones sensibles de drones.
• Impacto práctico: He encontrado que las funciones de retorno al punto de origen y autónomas son significativamente más confiables con receptores de múltiples constelaciones. Esto proporciona tranquilidad durante vuelos de largo alcance.
Adquisición más rápida
Obtener un bloqueo de posición rápidamente es importante para operaciones de campo eficientes:
• Procesamiento paralelo: Los receptores pueden adquirir señales de múltiples sistemas simultáneamente. Esto reduce drásticamente el tiempo de espera antes del despegue.
• TTFF reducido: Establecimiento de posición más rápido al inicio. Lo que solía tomar minutos ahora toma segundos.
• Mejora en el arranque en frío: Particularmente beneficioso para arranques en frío cuando el receptor no tiene datos recientes de satélites. He visto tiempos de arranque en frío caer de más de 60 segundos a menos de 30 segundos con receptores de múltiples constelaciones.
• Impacto práctico: Un bloqueo de GPS más rápido antes del despegue significa menos tiempo de espera y más tiempo de vuelo. Esto es especialmente valioso en entornos profesionales donde el tiempo es dinero.
Evolución de los receptores GNSS para drones
He usado casi todas las generaciones de receptores GNSS en mis drones, y la evolución ha sido notable. Cada generación ha traído mejoras significativas en rendimiento, tamaño y capacidades.
Generaciones de receptores
GPS temprano para drones (2010-2014)
Mis primeros drones equipados con GPS usaban módulos como el Ublox LEA-6 y NEO-6. Estos fueron revolucionarios en su momento pero primitivos según los estándares actuales:
• Características:
- Recepción solo de GPS
- Tasas de actualización más lentas (1-5Hz)
- Menor sensibilidad
- Mayor tamaño
- Mayor consumo de energía
• Rendimiento:
- Precisión: 5-10 metros
- TTFF: 45-60 segundos de arranque en frío
- Capacidad de satélites: 12-16 canales
Recuerdo la frustración de esperar un bloqueo de GPS antes de cada vuelo, a menudo parado en un campo abierto durante varios minutos. La retención de posición era aproximada en el mejor de los casos, con el dron derivando varios metros en cada dirección. ¡El retorno al punto de origen era una experiencia estresante, nunca se sabía exactamente dónde el dron decidiría que estaba el "hogar"!
GNSS de generación media (2015-2018)
En algún momento actualicé a módulos como el Ublox NEO-7 y NEO-M8N, que trajeron mejoras significativas:
• Características:
- Recepción de GPS + GLONASS
- Tasas de actualización moderadas (5-10Hz)
- Sensibilidad mejorada
- Factores de forma más pequeños
- Consumo de energía reducido
• Rendimiento:
- Precisión: 2-5 metros
- TTFF: 30-45 segundos de arranque en frío
- Capacidad de satélites: 32-72 canales
La adición de GLONASS fue un cambio de juego para la confiabilidad. Noté de inmediato que mis drones mantendrían el bloqueo de posición en áreas donde antes tenían dificultades. El M8N se convirtió en el caballo de batalla de la navegación de drones durante este período; todavía tengo varios drones volando con estos módulos hoy en día.
GNSS moderno (2019-2022)
En 2022, comencé a actualizar mi flota a módulos como el Ublox NEO-M9N y SAM-M8Q:
• Características:
- Multi-constelación (GPS, GLONASS, Galileo, BeiDou)
- Tasas de actualización más rápidas (10-18Hz)
- Alta sensibilidad
- Diseños compactos
- Operación eficiente en energía
• Rendimiento:
- Precisión: 1-3 metros
- TTFF: 15-30 segundos de arranque en frío
- Capacidad de satélites: 72-184 canales
La mejora en el rendimiento fue sustancial. La retención de posición se volvió muy sólida y la precisión de retorno al punto de origen mejoró a menos de un metro del punto de despegue. La capacidad de usar las cuatro constelaciones principales simultáneamente proporcionó una excelente redundancia y rendimiento en entornos desafiantes.
Última generación (2023-presente)
Mis construcciones más nuevas utilizan módulos de vanguardia como el Ublox NEO-M10 y ZED-F9P (para aplicaciones RTK):
• Características:
- Multi-constelación y multi-frecuencia completas
- Altas tasas de actualización (hasta 25Hz)
- Sensibilidad extremadamente alta
- Paquetes ultra compactos
- Consumo de energía muy bajo
- Capacidad RTK en modelos de gama alta
• Rendimiento:
- Precisión: 0.5-2 metros (estándar), 1-3cm (RTK)
- TTFF: 5-15 segundos de arranque en frío
- Capacidad de satélites: más de 184 canales
Estos últimos módulos representan un salto cuántico en el rendimiento. La serie M10 ofrece una sensibilidad y eficiencia energética excepcionales, mientras que el F9P brinda precisión RTK de grado topográfico a los drones de consumo. Me ha impresionado particularmente su rendimiento en entornos desafiantes como áreas urbanas y doseles de bosques ligeros.
Mirada detallada a los módulos GNSS populares para drones
A lo largo de los años, he usado la mayoría de los módulos GNSS populares en varias construcciones. Aquí está mi evaluación de sus capacidades y aplicaciones ideales:
Ublox NEO-M8N
El caballo de batalla del GNSS para drones durante muchos años, y todavía ampliamente utilizado:
• Constelaciones: GPS, GLONASS, Galileo, BeiDou (recepción concurrente de hasta 3)
• Canales: 72 canales de seguimiento
• Tasa de actualización: Hasta 10Hz (típicamente 5Hz en drones)
• Sensibilidad: -167dBm de seguimiento
• Precisión: 2.5m CEP (Error Circular Probable)
• Consumo de energía: 23mA @ 3.3V
He instalado docenas de módulos M8N en varios drones, y ofrecen un excelente equilibrio entre rendimiento y costo. El módulo admite la recepción simultánea de hasta tres constelaciones, aunque normalmente utilizo GPS+GLONASS para obtener la mejor combinación de rendimiento y eficiencia energética.
Una limitación que he descubierto es que habilitar todas las constelaciones simultáneamente a veces puede causar problemas de seguimiento debido a las limitaciones de los canales. Para la mayoría de las aplicaciones, GPS+GLONASS o GPS+Galileo proporcionan los mejores resultados.

El M8N sigue siendo una opción sólida para navegación de propósito general, retorno al punto de partida y mantenimiento de posición. Las implementaciones comunes incluyen el BN-180, BN-220 y muchos módulos FC integrados.
Ublox NEO-M9N
El sucesor mejorado del M8N, que ofrece mejoras significativas:
• Constelaciones: GPS, GLONASS, Galileo, BeiDou (recepción simultánea de todos)
• Canales: 184 canales de seguimiento
• Tasa de actualización: Hasta 25Hz (típicamente 10Hz en drones)
• Sensibilidad: -167dBm de seguimiento
• Precisión: 1.5m CEP (Error Circular Probable)
• Consumo de energía: 45mA @ 3.3V (adquisición), 34mA (seguimiento)
Cuando actualicé mi principal dron de largo alcance de un M8N a un M9N, la diferencia fue inmediatamente notable. El M9N puede rastrear todas las constelaciones simultáneamente sin limitaciones de canales, proporcionando una excelente redundancia y rendimiento.
La mayor tasa de actualización (10Hz vs. 5Hz) resulta en una navegación más suave y ajustes de posición más receptivos. He encontrado que el M9N es particularmente valioso para la navegación de precisión y misiones de waypoints, donde la precisión mejorada hace una diferencia notable.

Una desventaja es el consumo de energía ligeramente superior, aunque sigue siendo insignificante en el contexto del uso general de energía del dron. Las implementaciones comunes incluyen el Matek M9N-5883 y el HGLRC M9N.
Ublox NEO-M10S
La última generación de GNSS estándar, empujando los límites del rendimiento:
• Constelaciones: GPS, GLONASS, Galileo, BeiDou, QZSS, NavIC (recepción simultánea de todos)
• Canales: más de 184 canales de seguimiento
• Tasa de actualización: Hasta 25Hz
• Sensibilidad: -170dBm de seguimiento
• Precisión: 1.0m CEP (Error Circular Probable)
• Consumo de energía: 38mA @ 3.3V (potencia completa), 12mA (ahorro de energía)
Recientemente he comenzado a probar la serie M10 en mis construcciones más nuevas, y las mejoras son sutiles pero significativas. La característica destacada es la excepcional eficiencia energética: el modo Super-E puede reducir el consumo de energía hasta en un 70% mientras mantiene el rendimiento.
La sensibilidad mejorada (-170dBm vs. -167dBm) se traduce en un mejor rendimiento en entornos desafiantes como cañones urbanos o bajo una cubierta ligera de árboles. He notado un seguimiento de satélites más consistente en áreas donde las generaciones anteriores ocasionalmente perdían el bloqueo.

El M10 es ideal para misiones de largo alcance donde la eficiencia energética es importante, y para volar en entornos desafiantes. Todavía es relativamente nuevo en el mercado de drones, pero espero que se convierta en el nuevo estándar a medida que mejore la disponibilidad.
Ublox ZED-F9P
El módulo de alta precisión con capacidad RTK para aplicaciones profesionales:
• Constelaciones: GPS, GLONASS, Galileo, BeiDou (recepción simultánea de todos)
• Canales: 184 canales de seguimiento
• Tasa de actualización: Hasta 25Hz
• Sensibilidad: -167dBm de seguimiento
• Precisión: 1.0m CEP estándar, 1cm + 1ppm con RTK
• Consumo de energía: 68mA @ 3.3V
Para mis drones de mapeo y topografía, el F9P ha sido transformador. La recepción multibanda (L1/L2/L5) y la capacidad RTK permiten un posicionamiento a nivel de centímetros, que es esencial para aplicaciones de precisión.
La configuración de RTK requiere componentes adicionales: una estación base o servicio NTRIP para correcciones, además de un enlace de datos para transmitir esas correcciones al dron. Utilizo una conexión 4G/LTE para mi dron de topografía, que me permite recibir correcciones NTRIP de servicios públicos.

El F9P es excesivo para drones FPV o de fotografía estándar, pero es invaluable para aplicaciones de mapeo, topografía, agricultura de precisión y aterrizaje automatizado. Las implementaciones comunes incluyen el Here3 y el Holybro H-RTK F9P.
Guía de selección de módulos
La elección del módulo GNSS adecuado depende de sus necesidades específicas. Aquí está mi consejo práctico basado en años de construcción y vuelo de diferentes configuraciones:
Para navegación básica
• Recomendado: NEO-M8N o equivalente
• Consideraciones clave:
- Adecuado para RTH y mantenimiento de posición
- Buen equilibrio entre rendimiento y costo
- Ampliamente compatible con todo el firmware de navegación
- Normalmente incluye brújula
Todavía uso módulos M8N en muchas de mis construcciones porque son rentables y funcionan bien para la navegación general. Si está construyendo un dron FPV estándar con necesidades ocasionales de mantenimiento de posición y retorno al punto de partida, el M8N sigue siendo una opción sólida.
Para navegación avanzada
• Recomendado: NEO-M9N o equivalente
• Consideraciones clave:
- Mejor para misiones de puntos de referencia
- Actualizaciones de posición más rápidas
- Más confiable en entornos desafiantes
- Vale la pena la actualización para navegación seria
Para mis drones autónomos de puntos de referencia y construcciones de largo alcance, me he estandarizado en el M9N. La precisión mejorada y la tasa de actualización hacen una diferencia notable en el rendimiento de navegación, y la capacidad de usar todas las constelaciones simultáneamente mejora la confiabilidad en entornos variados.
Para Aplicaciones Profesionales
• Recomendado: NEO-M10 o ZED-F9P
• Consideraciones Clave:
- M10 para el mejor rendimiento GNSS estándar
- F9P cuando se requiere precisión centimétrica
- Considerar las implicaciones de potencia y peso
- Puede requerir configuración y ajustes adicionales
Mis drones de topografía y mapeo usan el F9P para posicionamiento de precisión centimétrica. Para exploración de largo alcance donde la precisión estándar a nivel de metros es suficiente pero la confiabilidad es primordial, el M10 proporciona la mejor combinación de rendimiento y eficiencia energética.
Para Largo Alcance/Resistencia
• Recomendado: NEO-M10 con gestión de energía
• Consideraciones Clave:
- La eficiencia energética se vuelve crítica
- La confiabilidad es primordial
- Considerar la calidad y ubicación de la antena
- Se recomiendan sistemas de navegación de respaldo
Para mis construcciones de más largo alcance, la eficiencia energética y la confiabilidad son las principales prioridades. El modo Super-E del M10 proporciona excelentes ahorros de energía mientras mantiene el rendimiento. También presto especial atención a la calidad y ubicación de la antena, ya que la recepción de la señal se vuelve cada vez más importante cuanto más lejos vueles.
Implementación del Módulo GNSS
La forma en que implementes tu módulo GNSS puede ser tan importante como el módulo que elijas. He aprendido muchas lecciones sobre la instalación óptima a través de prueba y error.
Integración de Hardware
Consideraciones de la Antena
La antena es crítica para el rendimiento GNSS – una lección que aprendí por las malas después de varias construcciones con una ubicación de antena subóptima:
• Antenas Patch: Las más comunes en módulos de drones
- Ventajas: Compactas, direccionales hacia arriba, buena vista del cielo
- Desventajas: El rendimiento varía con la orientación
- Mejores Prácticas: Montar plana con vista despejada del cielo

La mayoría de mis drones usan antenas patch, que funcionan bien cuando se montan planas en la placa superior con una vista despejada del cielo. He descubierto que incluso una leve inclinación puede reducir el rendimiento, así que tengo cuidado de asegurarme de que la antena esté perfectamente nivelada.
• Antenas Helicoidales: Se encuentran en algunos módulos de alto rendimiento
- Ventajas: Mejor recepción en elevaciones bajas, menos sensibles a la orientación
- Desventajas: Más grandes, más caras
- Mejores Prácticas: Aún necesita una exposición razonable al cielo

Para mis construcciones de largo alcance, prefiero las antenas helicoidales a pesar de su mayor tamaño. Son menos sensibles a la orientación y proporcionan una mejor recepción cuando el dron está inclinado durante los giros, lo que ayuda a mantener el bloqueo de satélites durante maniobras agresivas.
• Antenas Externas: Opción para algunos módulos
- Ventajas: Ubicación flexible, potencialmente mejor rendimiento
- Desventajas: Peso adicional, complejidad, posibles daños
- Mejores Prácticas: Usar cable de alta calidad, minimizar la longitud
Uso antenas externas en mis drones de mapeo para separar la antena de las fuentes de interferencia. La clave es usar cables cortos y de alta calidad – aprendí por experiencia que los cables baratos pueden degradar significativamente la señal.
Plano de Tierra
El plano de tierra afecta el rendimiento de la antena – un detalle que muchos constructores pasan por alto:
• Propósito: Refleja las señales y mejora la recepción
• Implementación: Placa de metal o área de PCB debajo de la antena
• Tamaño: Idealmente al menos 60-80mm de diámetro para un rendimiento óptimo
• Alternativas: Algunos módulos incluyen un plano de tierra incorporado

Después de experimentar con diferentes configuraciones de plano de tierra, he descubierto que un simple disco de aluminio (de unos 70 mm de diámetro) debajo del módulo GNSS puede mejorar la recepción en 2-3dB – equivalente a una sensibilidad 30-50% mejor. Para módulos sin planos de tierra incorporados, esta simple adición hace una diferencia notable en la adquisición y retención de satélites.
Ubicación de Montaje
Dónde coloques el módulo GNSS importa significativamente:
• Montaje en Pila: Dentro del marco
- Ventajas: Protección contra choques
- Desventajas: Posible interferencia de la electrónica, vista del cielo bloqueada
- Mejores Prácticas: Solo con módulos de alta sensibilidad, bloqueo de fibra de carbono
He intentado montar módulos GNSS en pila dentro del marco, pero los resultados fueron decepcionantes debido al bloqueo de señal de la placa superior. Solo recomiendo este enfoque para construcciones muy pequeñas donde el montaje superior no es práctico, y solo con módulos de alta sensibilidad.
• Placa Superior: Ubicación más común
- Ventajas: Vista clara del cielo, lejos de interferencias del suelo
- Desventajas: Exposición a daños por choques
- Mejores prácticas: Centro del dron si es posible

La mayoría de mis drones tienen el módulo GNSS montado en la placa superior, lo que proporciona la mejor vista del cielo. Normalmente lo coloco en la parte trasera en una bandeja de extensión impresa en 3D para equilibrar y minimizar el impacto de la inclinación del marco durante el vuelo.
• Montaje en mástil: Elevado por encima del marco
- Ventajas: Excelente vista del cielo, interferencia reducida
- Desventajas: Vulnerabilidad a choques, peso añadido
- Mejores prácticas: Usar con carcasa protectora

Para mis drones de mapeo donde el rendimiento GNSS es crítico, uso montajes en mástil para elevar la antena por encima de todas las fuentes potenciales de interferencia. La clave es usar una carcasa protectora o un diseño que pueda resistir choques - ¡he perdido algunas antenas aprendiendo esta lección!
Mitigación de interferencias
Las señales GNSS son muy débiles y susceptibles a interferencias, un hecho con el que me he familiarizado íntimamente a través de la resolución de problemas de mala recepción:
• Fuentes de interferencia:
- Sistemas de distribución de energía
- Transmisores de video
- Ruido de motores y ESC
- Bloqueo de fibra de carbono
- Otros sistemas de radio
• Estrategias de mitigación:
- Mantener distancia de cables de alimentación y VTX
- Usar cables blindados para el módulo GNSS
- Agregar núcleos de ferrita a los cables de alimentación
- Considerar material de blindaje RF
- Mantener las antenas alejadas de la fibra de carbono
Una de las lecciones más importantes que he aprendido es la importancia de mantener la antena GNSS alejada de los transmisores de video. En una construcción, tuve problemas persistentes de recepción hasta que me di cuenta de que la antena VTX estaba a solo 3 cm de la antena GPS. Moverla al extremo opuesto del marco resolvió inmediatamente el problema.
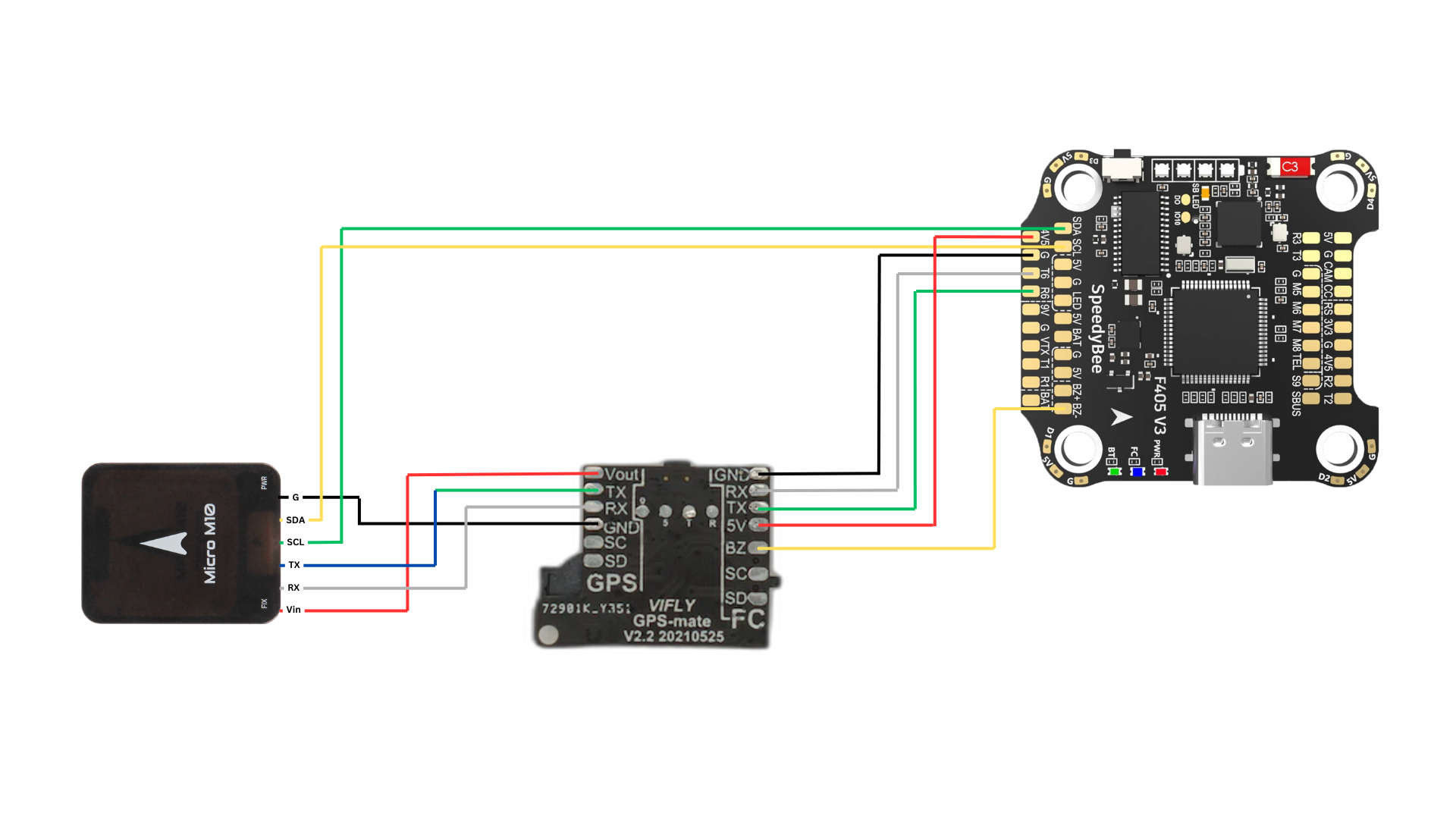
Desafortunadamente, en la mayoría de mis construcciones el espacio se convierte en una preocupación y no siempre tengo la posibilidad de colocar el módulo GPS completamente aislado de otras antenas. En esos casos, productos como GPS-mate son verdaderos salvavidas.

Para construcciones con placas superiores de fibra de carbono, siempre uso un separador no conductor para elevar el módulo GNSS al menos 10-15 mm por encima de la fibra de carbono. Este simple cambio puede mejorar drásticamente la recepción al evitar que la fibra de carbono bloquee las señales de los satélites.
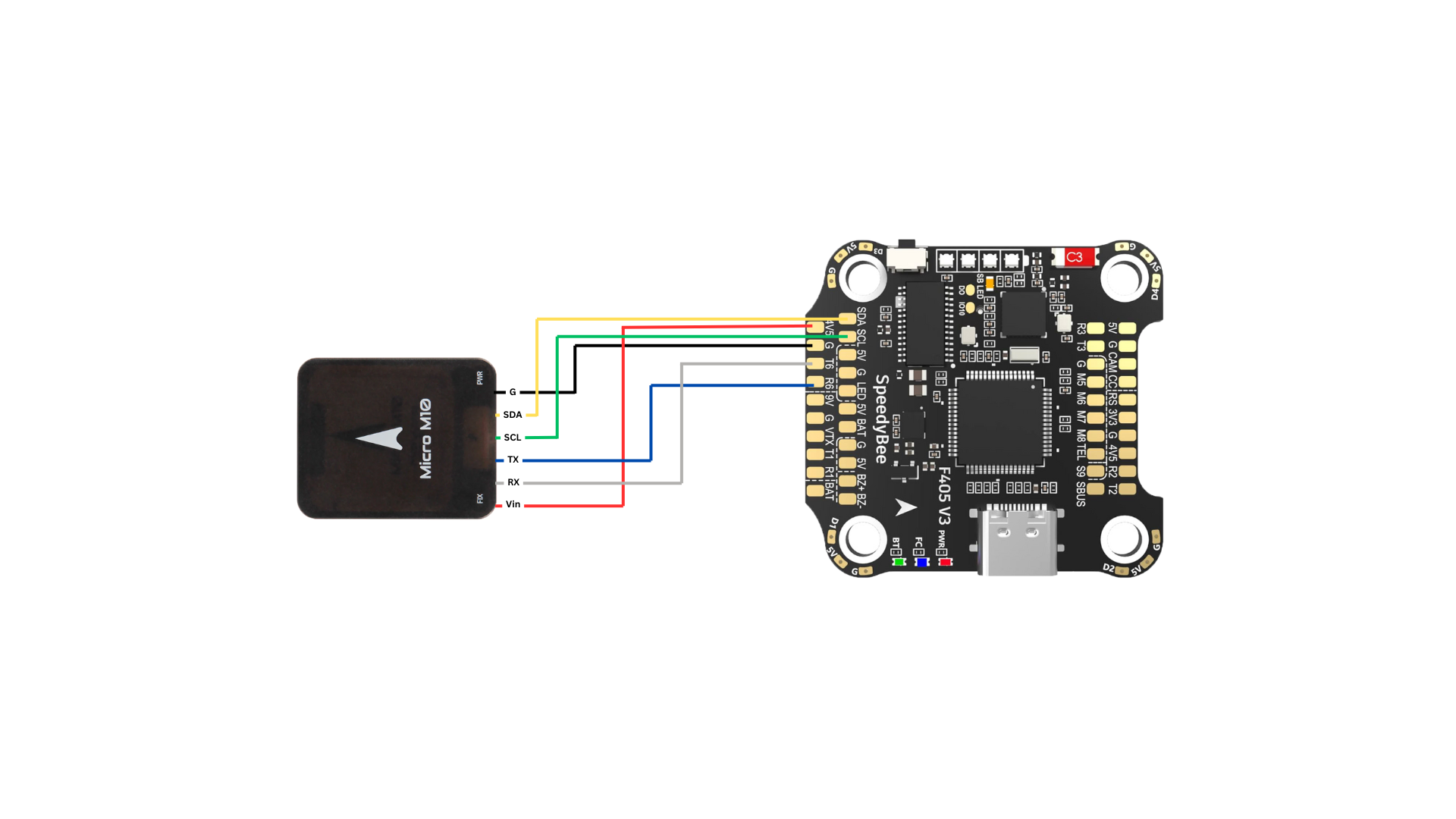
Cableado
Configuración de software
Ajustes de firmware
El firmware moderno del controlador de vuelo ofrece varias opciones de configuración GNSS. Esto es lo que he encontrado que funciona mejor en diferentes sistemas:
Configuración GNSS de INAV
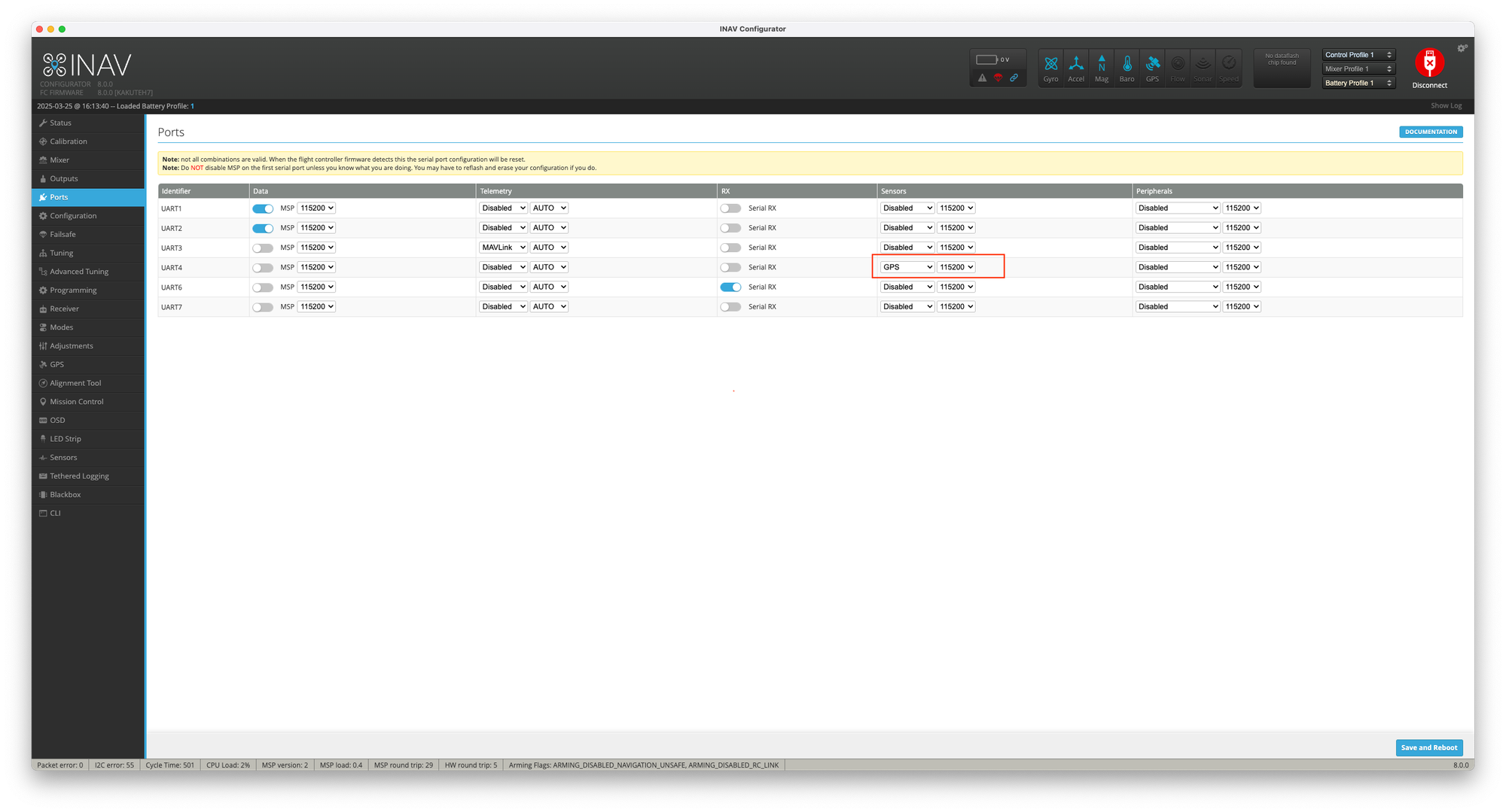
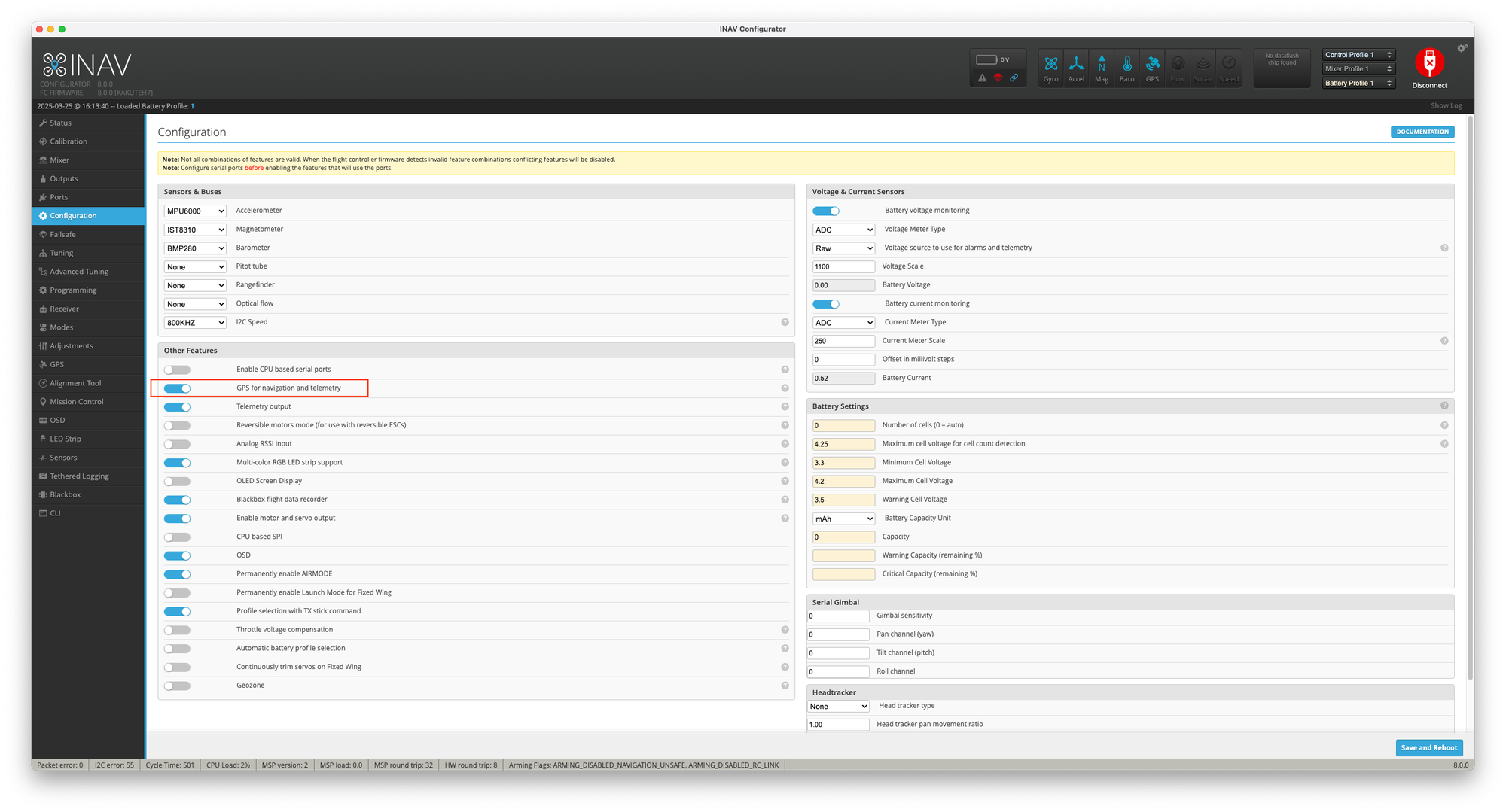
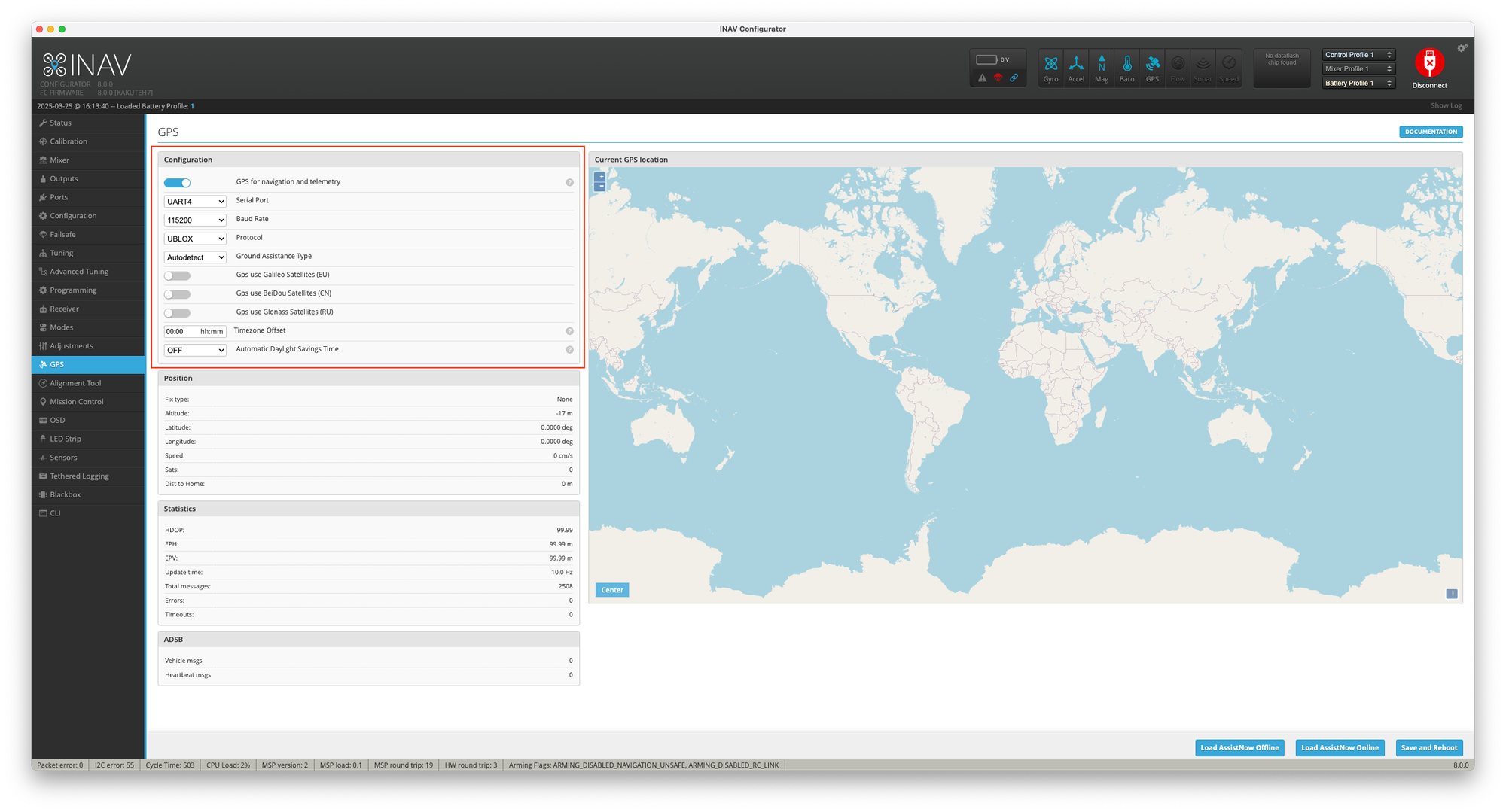
He descubierto que combinar GNSS con datos del barómetro proporciona la retención de altitud más estable. Agregar el magnetómetro (UBLOX+BARO+MAG) puede mejorar la estimación de posición en algunos casos, pero es más susceptible a interferencias. Se está convirtiendo en una tendencia alejarse de los magnetómetros a medida que evoluciona la precisión del posicionamiento GPS.
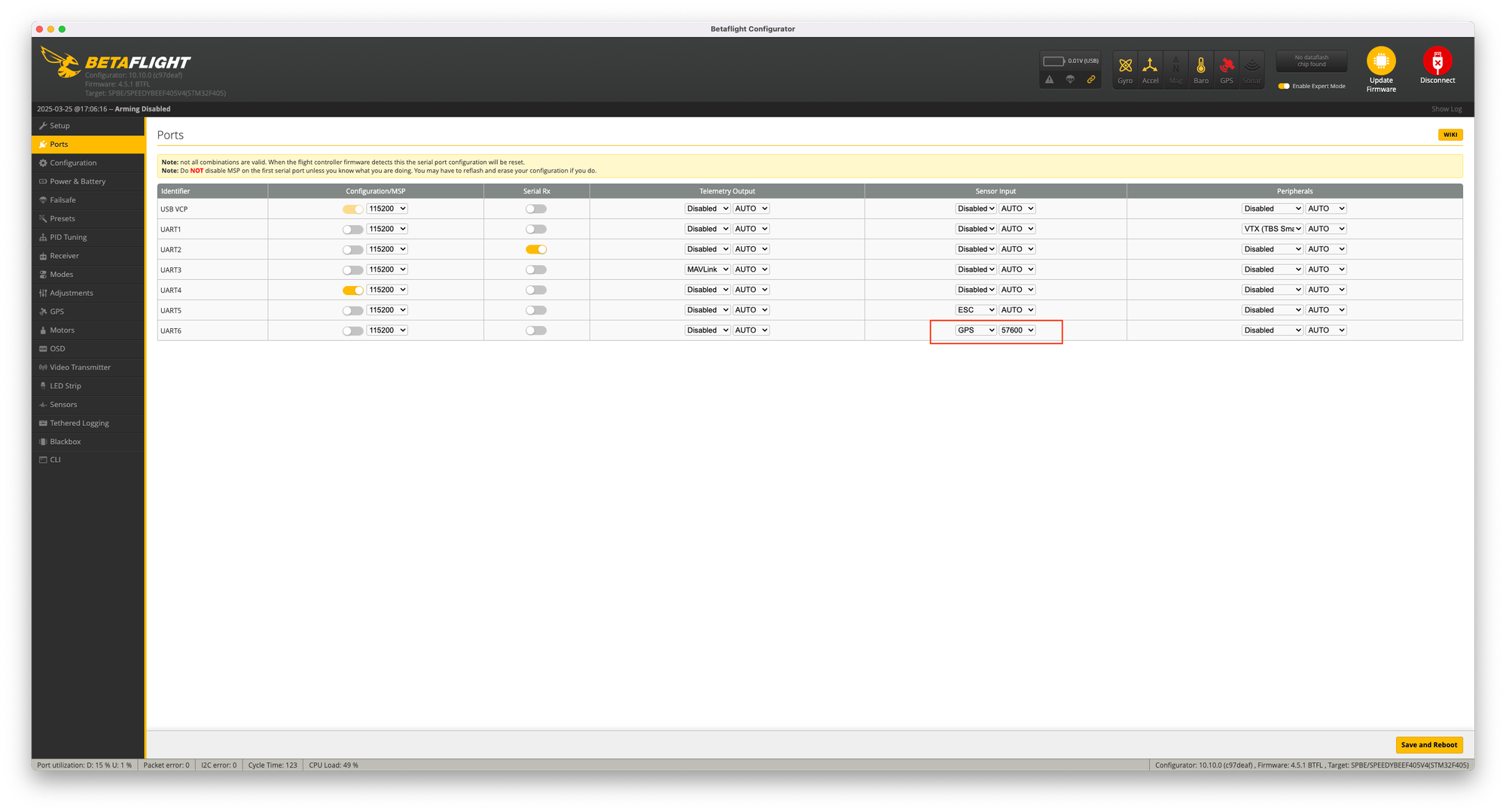
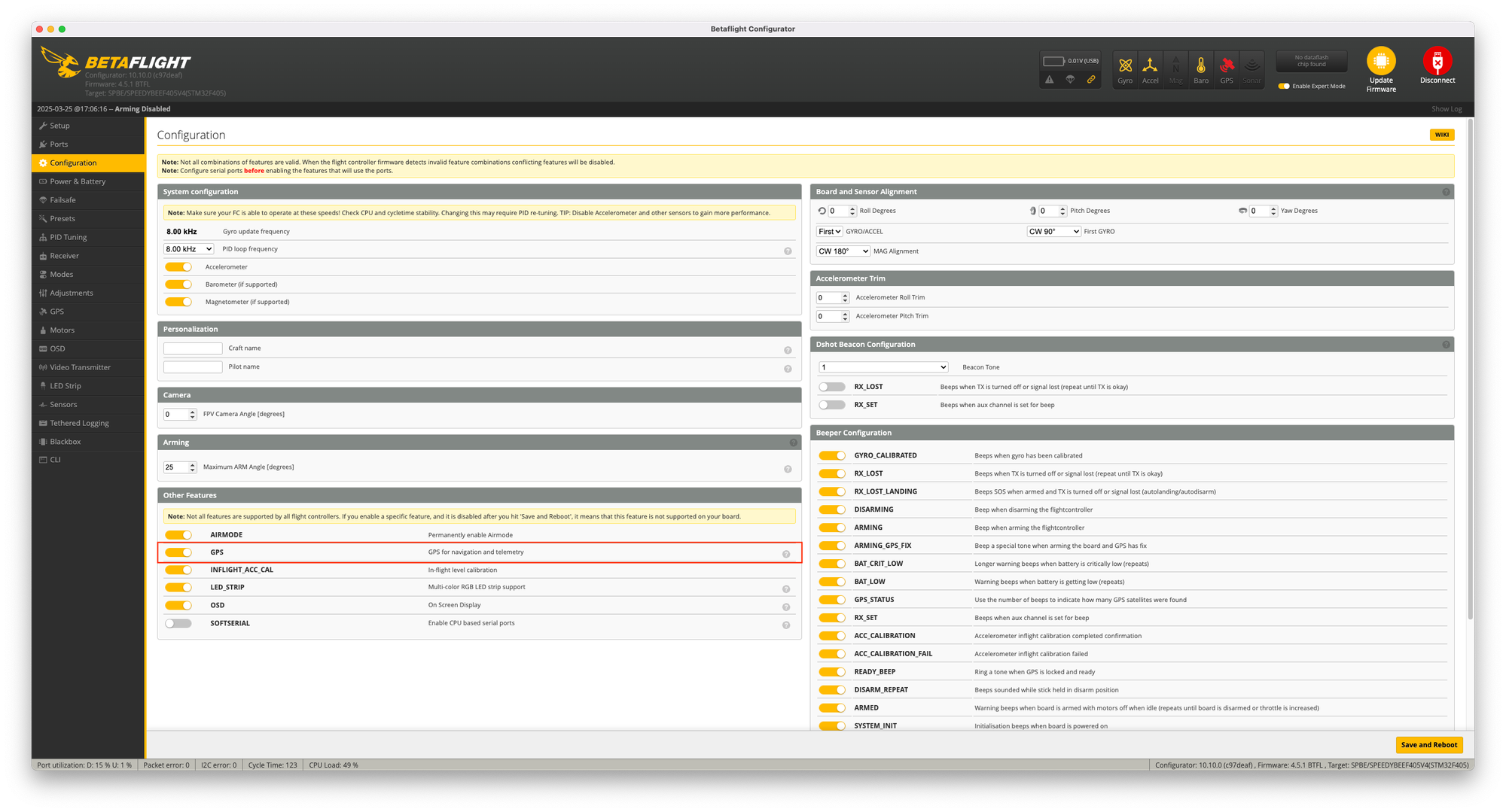
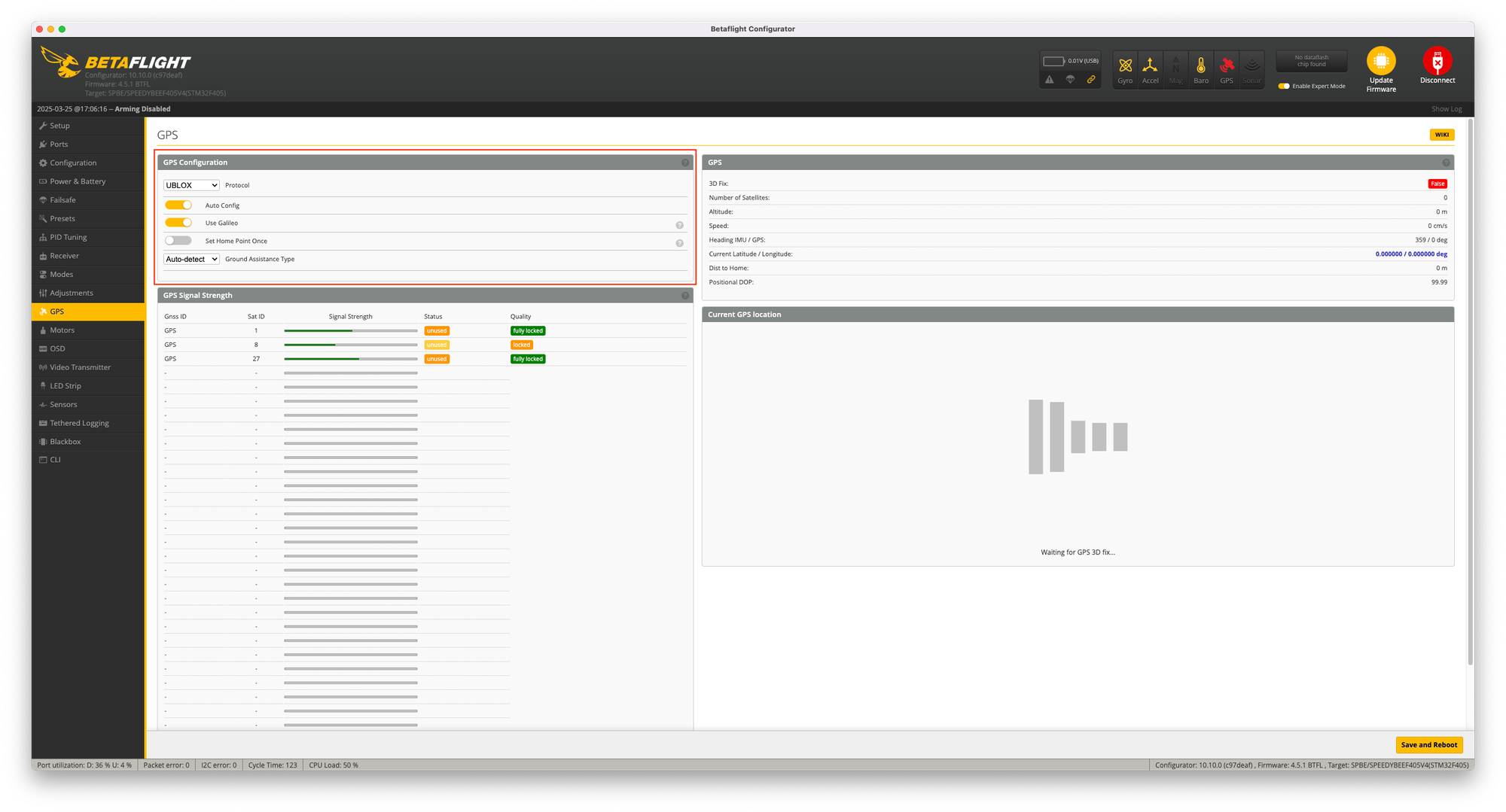
Configuración GPS de Betaflight
Para mis construcciones de estilo libre y carreras con capacidad de rescate GPS, utilizo la siguiente configuración predeterminada:
Temas avanzados de GNSS
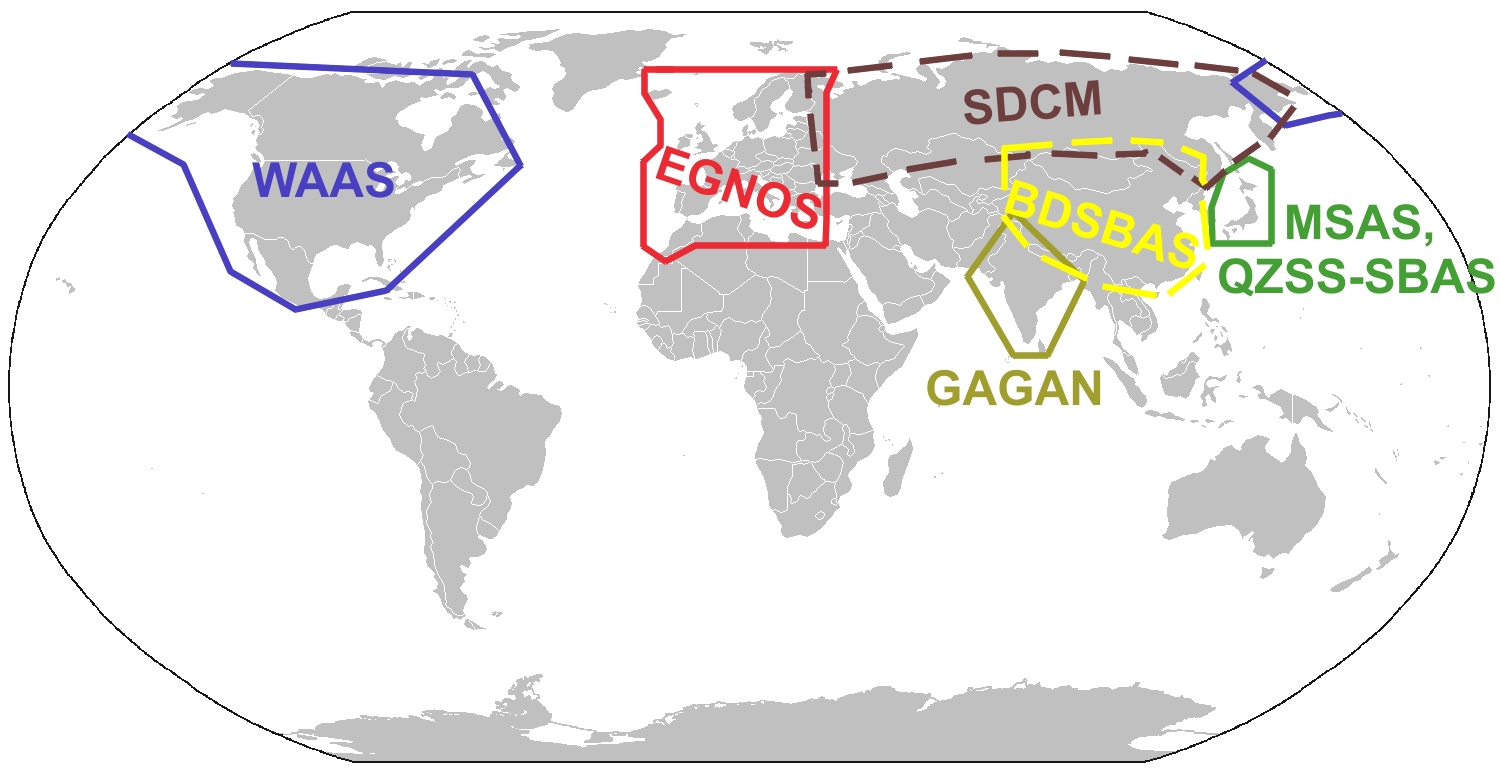
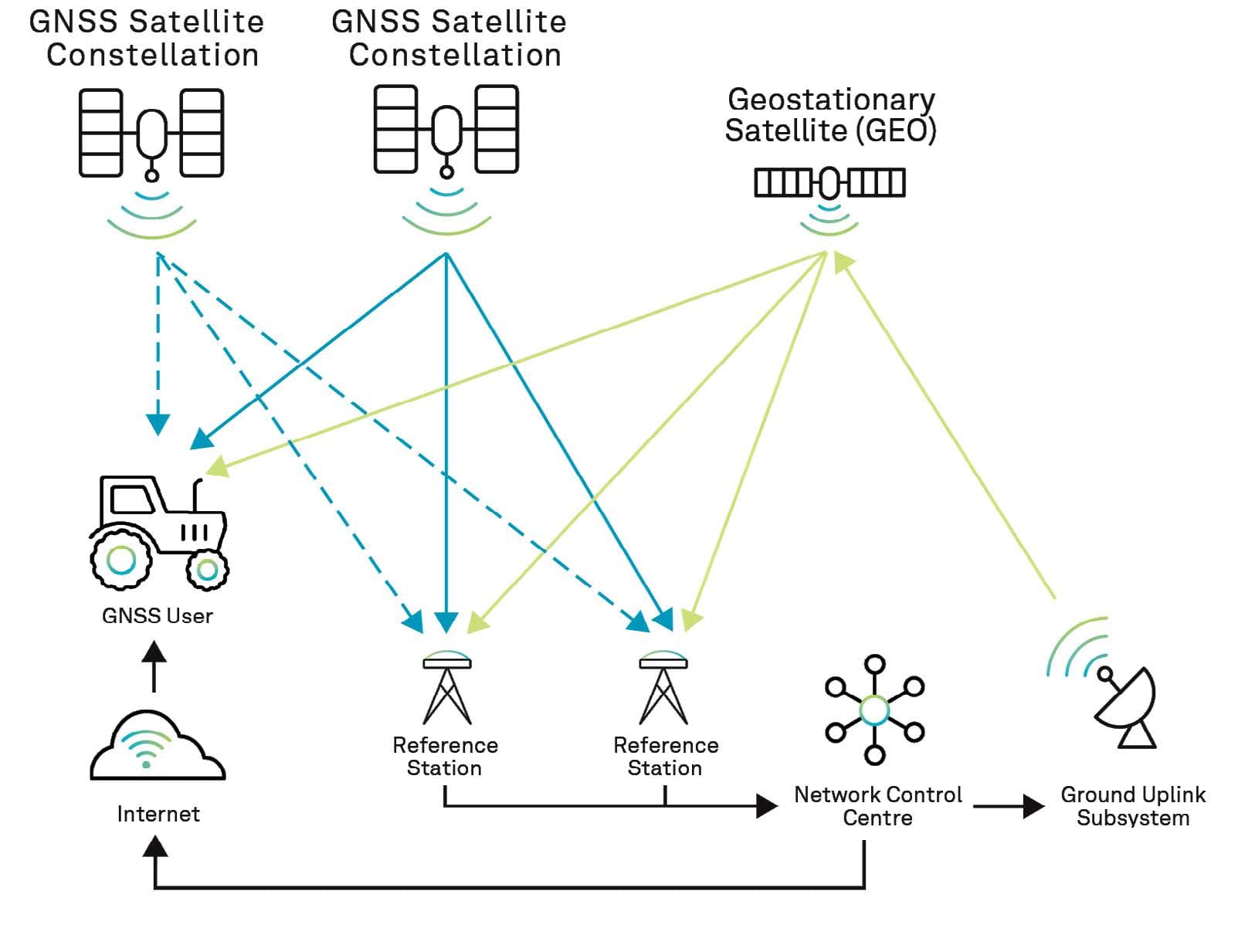
SBAS (Sistema de Aumentación Basado en Satélites)
Los sistemas regionales que mejoran la precisión de GNSS han sido un beneficio significativo en mi experiencia:
• WAAS (Sistema de Aumentación de Área Amplia): América del Norte
• EGNOS (Servicio Europeo de Navegación por Complemento Geoestacionario): Europa
• MSAS (Sistema de Aumentación Multifuncional por Satélite): Japón
• GAGAN (Navegación Aumentada Asistida por GPS GEO): India
• SDCM (Sistema de Correcciones Diferenciales y Monitoreo): Rusia
Estos sistemas proporcionan datos de corrección que pueden mejorar la precisión de 3-5m a 1-2m. He notado los beneficios más claramente cuando vuelo en Europa con EGNOS y en América del Norte con WAAS. Las correcciones son particularmente valiosas para la precisión de altitud, que suele ser la dimensión más débil en el posicionamiento GNSS.
Más allá de las mejoras de precisión, los sistemas SBAS también proporcionan monitoreo de integridad, lo que ayuda a identificar señales de satélite poco confiables. Esto es valioso para aplicaciones críticas de seguridad donde saber cuándo no confiar en los datos de posición es tan importante como tener datos precisos.
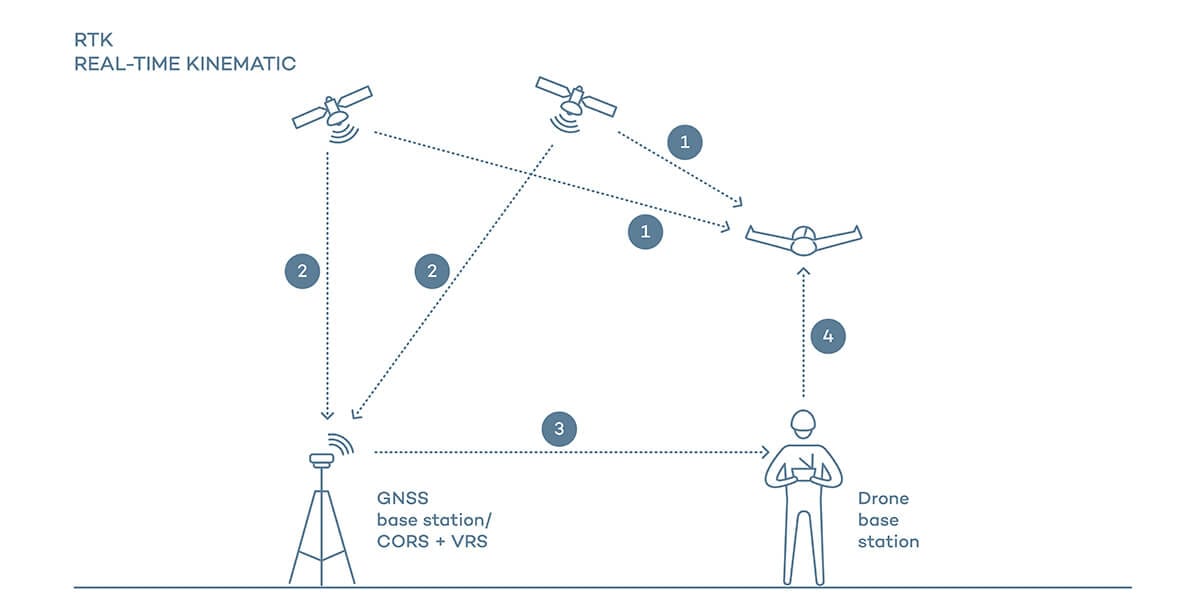
RTK (Cinemática en Tiempo Real)
Para mis drones de mapeo y topografía, RTK ha sido transformador:
Principio básico: Mediciones de fase de portadora para precisión centimétrica
Componentes:
- Estación base: Referencia de posición fija
- Rover: Receptor móvil en el dron
- Enlace de corrección: Conexión de radio o red
Precisión: Típicamente 1-3cm en condiciones ideales
Configurar RTK requiere más componentes y complejidad, pero los resultados valen la pena para aplicaciones de precisión. Utilizo una conexión 4G/LTE para recibir correcciones NTRIP de servicios públicos, lo que elimina la necesidad de una estación base local.
Las principales limitaciones que he encontrado con RTK son:
- Requiere una vista despejada del cielo
- Estación base dentro de ~10km (aunque la RTK de red extiende esto)
- Enlace de datos de corrección confiable
- Se requiere un período de inicialización
Para la mayoría de los vuelos recreativos, RTK es excesivo. Pero para mapeo, topografía, agricultura de precisión y aterrizaje automatizado, es invaluable. La capacidad de regresar repetidamente a la misma posición exacta con precisión centimétrica abre muchas aplicaciones profesionales.
PPP (Posicionamiento de Punto Preciso)
Para algunos de mis vuelos de exploración remota donde RTK no es práctico:
• Principio básico: Utiliza datos precisos de órbita y reloj de satélites
• Ventaja: No se requiere estación base
• Desventaja: Mayor tiempo de convergencia (minutos a horas)
• Precisión: Nivel de decímetro (10-30cm)
PPP es menos común en aplicaciones de drones debido a los requisitos de tiempo de convergencia, pero es una técnica valiosa para ciertas aplicaciones especializadas. Lo he usado para misiones de mapeo de larga duración donde el dron tiene tiempo para lograr la convergencia antes de comenzar el patrón de mapeo.
Recepción multibanda
Los últimos módulos de gama alta como el ZED-F9P utilizan múltiples bandas de frecuencia:
• Frecuencia única: La mayoría de los GNSS de drones (L1/E1/B1)
• Doble frecuencia: Módulos de gama alta (L1+L5/E5/B2)
• Ventajas:
- Mejor mitigación de trayectos múltiples
- Inicialización RTK más rápida
- Precisión mejorada
- Mejor rendimiento en entornos desafiantes
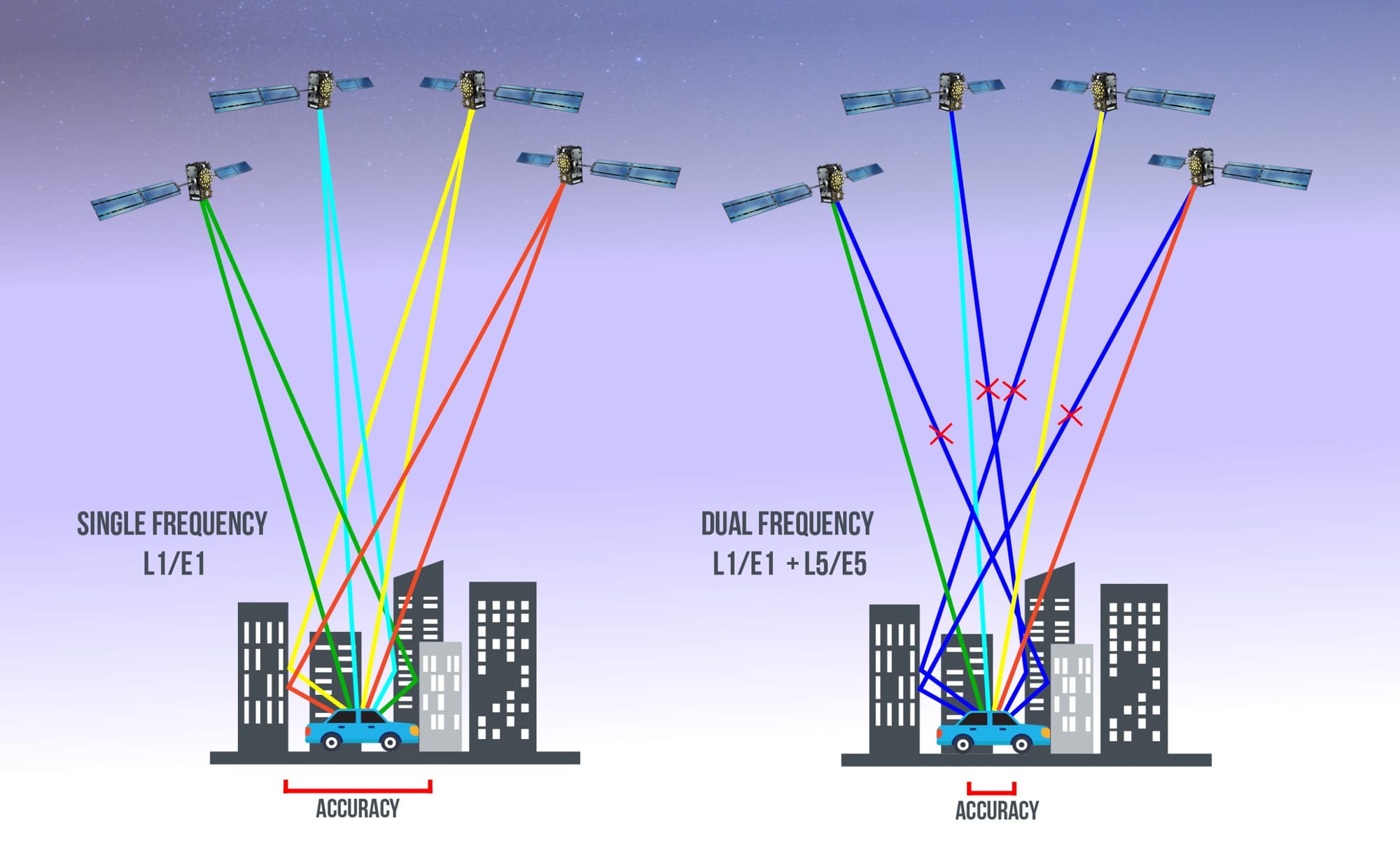
La diferencia es notable: mi dron de topografía equipado con F9P logra una solución RTK mucho más rápido que los sistemas RTK de frecuencia única más antiguos que he usado. La mitigación de trayectos múltiples es particularmente valiosa en entornos con superficies reflectantes como agua o edificios.
Solución de problemas de GNSS
A lo largo de los años, he encontrado y resuelto innumerables problemas de GNSS. Estos son los problemas más comunes y sus soluciones:
Mala recepción de satélites
Síntomas:
- Pocos satélites adquiridos
- Altos valores de HDOP
- Datos de posición inconsistentes
- Pérdida frecuente de GNSS
Soluciones:
- Mejorar la ubicación de la antena: he visto mejoras dramáticas simplemente moviendo la antena unos centímetros lejos de las fuentes de interferencia.
- Alejarse de las fuentes de interferencia, particularmente transmisores de video y cables de alimentación.
- Usar un módulo de múltiples constelaciones: más satélites significa más posibilidades de buena recepción.
- Verificar obstrucciones físicas: la fibra de carbono es particularmente problemática.
- Verificar la conexión de la antena: las conexiones sueltas pueden causar problemas intermitentes.
Una vez pasé horas solucionando problemas de mala recepción en una nueva construcción, solo para descubrir que la placa superior de fibra de carbono estaba bloqueando las señales. Agregar un espaciador de 15 mm para elevar el módulo resolvió el problema al instante.
Adquisición lenta de satélites
Síntomas:
- Mucho tiempo para la primera solución
- Bloqueo GPS retrasado antes del vuelo
Soluciones:
- Actualizar a un módulo más nuevo: cada generación ha mejorado los tiempos de adquisición.
- Habilitar todas las constelaciones disponibles: más satélites significa una adquisición más rápida.
- Establecer el modelo dinámico apropiado: usar "Peatón" para un dron puede ralentizar la adquisición.
- Asegurar que el voltaje de la batería sea estable: las caídas de voltaje pueden reiniciar el proceso de adquisición.
- Considerar una antena externa para entornos desafiantes: a veces la antena incorporada no es suficiente.
He descubierto que mantener el receptor encendido entre vuelos (usando una pequeña batería) puede reducir drásticamente el tiempo de adquisición al mantener los datos de efemérides.
Deriva de posición
Síntomas:
- La retención de posición se mueve gradualmente
- RTH aterriza lejos del punto de despegue
- Los waypoints no se siguen con precisión
Soluciones:
- Espere una mejor cobertura de satélites (HDOP más bajo) – Siempre espero a que HDOP sea < 2.0 antes de confiar en los datos de posición.
- Aumente el requisito mínimo de satélites – más satélites generalmente significa mejor precisión.
- Habilite SBAS si está disponible – las correcciones pueden reducir significativamente la deriva.
- Verifique si hay interferencia magnética que afecte la brújula – los problemas de la brújula a menudo se disfrazan como problemas de GNSS.
- Considere los factores ambientales (árboles, edificios) – las reflexiones de trayectos múltiples pueden causar errores de posición.
En una misión de mapeo, noté que el dron se desviaba gradualmente del curso. El problema resultó ser una brújula mal calibrada que se veía afectada por los motores. Recalibrar la brújula lejos de cualquier objeto metálico resolvió el problema.
Fallas de GNSS
Síntomas:
- Saltos repentinos de posición
- Comportamiento de navegación errático
- Pérdida temporal de posición
Soluciones:
- Ajuste los parámetros de filtrado de GNSS – la mayoría del firmware tiene configuraciones para suavizar los datos de GNSS.
- Aumente el suavizado de navegación – esto puede filtrar fallas momentáneas.
- Verifique si hay interferencia eléctrica intermitente – las fuentes de alimentación conmutadas son culpables comunes.
- Actualice al firmware más reciente – muchos problemas de GNSS se abordan en las actualizaciones de firmware.
- Considere una actualización de hardware a una generación más nueva – los receptores más nuevos tienen mejor rechazo de señales espurias.
He descubierto que agregar un condensador a la entrada de alimentación del módulo GNSS puede ayudar a reducir las fallas causadas por el ruido eléctrico del sistema de alimentación.
Herramientas de diagnóstico
U-Center (Software de configuración de Ublox)
Esta es mi herramienta preferida para diagnosticar problemas de GNSS:
• Propósito: Configurar y monitorear receptores GNSS de Ublox
• Características:
- Seguimiento de satélites en tiempo real
- Monitoreo de calidad de señal
- Ajuste de parámetros de configuración
- Actualizaciones de firmware
- Análisis de rendimiento
Me conecto a través de USB o UART passthrough desde el controlador de vuelo. La vista de intensidad de señal de satélite es particularmente útil para identificar problemas de interferencia – verá todos los satélites con intensidad de señal reducida en lugar de solo algunos específicos.
https://www.u-blox.com/en/product/u-center-es/
Visores de GNSS
Integrados en la mayoría del software de controladores de vuelo:
• Propósito: Visualizar el rendimiento de GNSS
• Ejemplos:
- Estado de GPS de Mission Planner
- Pantalla de configuración de GPS de INAV
- Pestaña de GPS de Betaflight
Siempre los reviso antes de los vuelos para verificar una buena recepción. Las métricas clave que monitoreo son:
- Recuento de satélites (más es mejor, me gusta ver 14+ para misiones críticas)
- Valor de HDOP (cuanto más bajo, mejor, apunto a < 1.5)
- Tipo de posición (3D es necesario para navegación, RTK flotante/fijo para aplicaciones de precisión)
- Intensidad de señal (indica la calidad de recepción y la posible interferencia)
Análisis de Blackbox
Para diagnóstico post-vuelo:
• Propósito: Revisar el rendimiento de GNSS durante el vuelo
• Herramientas:
- Blackbox Explorer
- Flight Review (ArduPilot)
He identificado muchos problemas sutiles a través del análisis de blackbox que no eran evidentes durante el vuelo. Los datos clave para examinar incluyen:
- Precisión de posición a lo largo del tiempo
- Deriva del punto de inicio
- Rendimiento de navegación
- Calidad de señal GNSS
Comparar los datos de GNSS con otros sensores (como acelerómetros) puede revelar problemas de integración que afectan el rendimiento de navegación.
Tendencias futuras en tecnología GNSS
Basándome en mi experiencia con los últimos módulos y desarrollos de la industria, aquí es hacia donde veo que se dirige la tecnología GNSS:
Avances de hardware
• Estándar multibanda: La frecuencia dual se está volviendo más común en dispositivos de consumo. Espero que esto llegue a los drones de hobby dentro de 2-3 años, brindando mejor precisión y confiabilidad.
• Miniaturización: Módulos más pequeños y livianos con mejor rendimiento. La tendencia hacia la integración continuará, con GNSS, brújula, barómetro e incluso IMU en paquetes únicos.
• Integración: GNSS combinado, brújula, barómetro y radio. Ya estoy viendo esto en algunos módulos de gama alta, y simplifica el cableado y reduce el peso.
• Eficiencia energética: Vida útil extendida de la batería para misiones de largo alcance. El modo Super-E del M10 es solo el comienzo; es probable que los módulos futuros reduzcan aún más el consumo de energía.
• Tecnología de antena: Mejor recepción en paquetes más pequeños. El diseño de antenas continúa avanzando, con un mejor rendimiento en factores de forma más pequeños.
Innovaciones de software
• Algoritmos mejorados: Mejor estimación y filtrado de posición. Los enfoques de aprendizaje automático están comenzando a aparecer en sistemas comerciales y eventualmente llegarán a los drones de hobby.
• Posicionamiento mejorado con IA: Aprendizaje automático para entornos desafiantes. He visto investigaciones tempranas que utilizan redes neuronales para mejorar el posicionamiento en cañones urbanos.
• Fusión de sensores: Integración más estrecha con otros sensores de navegación. Las líneas entre GNSS, posicionamiento visual y navegación inercial continuarán desdibujándose.
• Monitoreo de integridad: Mejor detección de señales poco confiables. A medida que los drones se vuelven más autónomos, saber cuándo no confiar en los datos GNSS se vuelve cada vez más importante.
• Configuración simplificada: Configuración más intuitiva. La complejidad de la configuración de GNSS ha sido una barrera para muchos usuarios, pero los sistemas más nuevos se están volviendo más plug-and-play.
Tecnologías emergentes
• Navegación por satélite LEO: Constelaciones de órbita terrestre baja para mayor precisión. Sistemas como Starlink potencialmente podrían ofrecer servicios de navegación con mejor rendimiento urbano que el GNSS tradicional.
• Navegación asistida por visión: Cámaras que mejoran GNSS en entornos desafiantes. Ya estoy usando esto en algunas construcciones, donde los sensores de flujo óptico complementan GNSS para un posicionamiento más robusto.
• Sensores cuánticos: Tecnología de posicionamiento de próxima generación. Todavía en laboratorios de investigación, pero los sensores cuánticos prometen mejoras dramáticas en la precisión sin referencias externas.
• Autenticación avanzada: Protección contra ataques de suplantación. A medida que la suplantación de GNSS se vuelve más común, las funciones de autenticación se volverán más importantes para aplicaciones críticas.
• Posicionamiento en malla: Drones que comparten datos de posición en enjambres. He experimentado con esto en configuraciones de varios drones, donde los drones pueden usar el posicionamiento relativo para mejorar sus estimaciones de posición absoluta.
Preguntas frecuentes: Preguntas comunes sobre la tecnología GNSS de drones
¿Cuál es la diferencia entre GPS, GNSS y GLONASS?
Esta es una de las preguntas más comunes que recibo cuando ayudo a las personas con sus construcciones:
• GPS (Sistema de Posicionamiento Global): El sistema de navegación por satélite estadounidense operado por la Fuerza Espacial de EE. UU. Es el sistema original y más utilizado.
• GNSS (Sistema Global de Navegación por Satélite): El término general para todos los sistemas de navegación por satélite, incluidos GPS, GLONASS, Galileo, BeiDou y sistemas regionales. Los receptores modernos generalmente usan múltiples constelaciones GNSS simultáneamente.
• GLONASS: El sistema de navegación por satélite de Rusia, similar al GPS pero con diferentes características orbitales y estructura de señal. Es el segundo sistema global más antiguo y proporciona una buena cobertura en latitudes altas.
Cuando alguien se refiere a un "módulo GPS" para un dron, normalmente están hablando de un receptor GNSS que puede utilizar múltiples constelaciones de satélites, no solo el sistema GPS estadounidense. Siempre aclaro esto cuando ayudo a los principiantes para evitar confusiones.
¿Vale la pena actualizar a un módulo GNSS de nueva generación?
Basado en mi experiencia actualizando numerosos drones:
• M6/M7 a M8: Mejora significativa en el tiempo de adquisición, soporte de constelaciones y precisión. Definitivamente vale la pena actualizar.
• M8 a M9: Mejoras notables en precisión, tasa de actualización y rendimiento de múltiples constelaciones. Vale la pena actualizar para uso de navegación serio.
• M9 a M10: Mejoras incrementales en sensibilidad, consumo de energía y rendimiento urbano. Vale la pena considerar para aplicaciones especializadas o si la eficiencia energética es crítica.
Para la mayoría de los pilotos aficionados, un módulo M8N sigue siendo adecuado para navegación básica, mientras que un M9N proporciona un excelente rendimiento para aplicaciones más exigentes. La serie M10 o F9P son principalmente beneficiosos para usos profesionales o especializados.
Actualicé mi dron de exploración de largo alcance de M8N a M9N y noté mejoras inmediatas en el tiempo de adquisición y la estabilidad de posición. Para mis quads de estilo libre que solo usan GPS para volver a casa, he mantenido los módulos M8N ya que son perfectamente adecuados para ese propósito.
¿Cuántos satélites necesito para una navegación confiable?
De mi experiencia con docenas de drones equipados con GNSS:
• Mínimo funcional: 5-6 satélites
• Mínimo recomendado: 8 satélites
• Buen rendimiento: 10-14 satélites
• Excelente rendimiento: 15+ satélites
Sin embargo, el recuento de satélites es solo una parte de la ecuación. HDOP (Dilución Horizontal de Precisión) es igualmente importante: un valor HDOP más bajo (idealmente por debajo de 2.0) indica una mejor geometría de satélites y un posicionamiento más preciso.
He tenido situaciones con más de 20 satélites pero un HDOP deficiente debido a que todos los satélites estaban agrupados en una parte del cielo, lo que resultó en un posicionamiento mediocre. Por el contrario, he tenido un excelente rendimiento con solo 9 satélites bien distribuidos en el cielo, dando un HDOP bajo.
Los receptores modernos de múltiples constelaciones a menudo pueden ver más de 20 satélites en condiciones de cielo abierto, proporcionando una excelente redundancia y precisión.
¿Usar múltiples constelaciones agota la batería más rápido?
Una pregunta que a menudo recibo de los pilotos preocupados por el tiempo de vuelo:
Usar múltiples constelaciones GNSS aumenta ligeramente el consumo de energía, pero el impacto es relativamente pequeño:
• Solo GPS: Consumo de energía base
• GPS+GLONASS: ~10-15% más de energía que solo GPS
• GPS+GLONASS+Galileo+BeiDou: ~20-30% más de energía que solo GPS
Para contextualizar, un módulo M8N típico consume alrededor de 25mA, mientras que una configuración completa de múltiples constelaciones podría consumir 30-35mA. En un dron con un consumo de corriente de 5-20A durante el vuelo, esta diferencia es insignificante (menos del 0,5% del consumo total de energía).
He medido la diferencia en mis construcciones de largo alcance, y el impacto en el tiempo de vuelo es imperceptible. Los beneficios de una mejor precisión, adquisición más rápida y mejor confiabilidad casi siempre superan el mínimo impacto de energía.
¿Qué constelación GNSS es la más precisa?
Basado en mis pruebas en diferentes regiones:
• GPS: Generalmente 3-5m de precisión, muy consistente y confiable
• GLONASS: Típicamente 4-7m de precisión, mejor en latitudes altas
• Galileo: 1-3m de precisión, diseñado para precisión civil
• BeiDou: 3-5m globalmente, 2-3m en la región Asia-Pacífico
Sin embargo, el mejor rendimiento proviene de usar múltiples constelaciones juntas, ya que se complementan entre sí en fortalezas y debilidades. Un receptor moderno que utiliza todas las constelaciones disponibles generalmente logrará una precisión de 1-3m en buenas condiciones, mejor que cualquier constelación individual por sí sola.
En mi experiencia, Galileo actualmente ofrece la mejor precisión civil de los sistemas globales, pero su ventaja es más notable cuando se combina con otras constelaciones.
¿Puedo usar RTK en un dron regular?
Sí, RTK se puede implementar en drones regulares con algunas consideraciones:
Requisitos:
- Módulo GNSS compatible con RTK (como ZED-F9P)
- Controlador de vuelo con soporte RTK (ArduPilot, INAV con limitaciones)
- Estación base o servicio NTRIP para correcciones
- Enlace de datos para transmisión de corrección (radio telemetría, 4G/LTE)
Consideraciones prácticas:
- Costo adicional ($150-300 para hardware RTK)
- Mayor complejidad en la configuración
- Necesidad de una fuente de datos de corrección
- Beneficio limitado para vuelo FPV estándar
He implementado RTK en varias construcciones, y si bien la precisión a nivel de centímetros es impresionante, generalmente es innecesaria para vuelos recreativos, carreras o estilo libre. Donde RTK tiene sentido es para aplicaciones de mapeo, topografía, agricultura de precisión y aterrizaje automatizado.
Para mi dron de topografía, uso un módulo ZED-F9P con una conexión 4G para recibir correcciones NTRIP de un servicio público. La configuración fue más compleja que una implementación GNSS estándar, pero los resultados valen la pena para aplicaciones profesionales.
¿Cómo afectan los factores ambientales el rendimiento GNSS?
Varios factores ambientales pueden impactar significativamente la recepción GNSS:
• Cañones urbanos: Los edificios bloquean y reflejan señales, reduciendo la precisión de 5 a 10 veces. He visto errores de posición de más de 20 metros en entornos urbanos densos con receptores de una sola constelación.
• Follaje denso: Los árboles pueden atenuar las señales en 10-30dB, reduciendo la visibilidad de los satélites. He descubierto que volar por encima del dosel de los árboles a menudo es necesario para una navegación confiable en áreas boscosas.
• Cuerpos de agua: Las reflexiones pueden causar errores de trayectoria múltiple. Al mapear líneas costeras, he notado saltos de posición cerca del borde del agua debido a reflexiones de señal.
• Clima: La lluvia intensa puede degradar ligeramente las señales (atenuación de 1-2dB). En mi experiencia, esto rara vez causa problemas de rendimiento notables.
• Condiciones ionosféricas: La actividad solar puede afectar la precisión. Durante tormentas solares, he observado un rendimiento ligeramente degradado, aunque los receptores modernos manejan esto bien.
• Fuentes de interferencia: La interferencia de RF cercana puede bloquear la recepción. Una vez tuve un dron que se negó a obtener un bloqueo de posición hasta que me di cuenta de que mi sistema de micrófono inalámbrico estaba causando interferencia.
Los receptores de múltiples constelaciones ayudan a mitigar estos problemas al proporcionar más satélites y frecuencias con las que trabajar, pero ningún sistema GNSS es completamente inmune a los desafíos ambientales. Para aplicaciones críticas en entornos desafiantes, siempre considero tecnologías de navegación complementarias como el flujo óptico o el posicionamiento visual.
Conclusión
La tecnología GNSS ha evolucionado dramáticamente desde sus orígenes militares hasta convertirse en un componente esencial de los sistemas de drones modernos. La transición de receptores GPS de una sola constelación a receptores GNSS de múltiples constelaciones ha mejorado significativamente el rendimiento, la confiabilidad y las capacidades de navegación.
Comprender las diferencias entre GPS, GLONASS, Galileo y BeiDou, así como la evolución de la tecnología de receptores desde los primeros módulos hasta las últimas generaciones M10 y F9P, permite a los pilotos de drones tomar decisiones informadas sobre sus sistemas de navegación. Ya sea que esté volando por recreación, carreras, estilo libre o aplicaciones profesionales, seleccionar la tecnología GNSS adecuada e implementarla correctamente puede mejorar las capacidades y la seguridad de su dron.
A medida que la tecnología GNSS continúa avanzando con recepción multibanda, algoritmos mejorados e integración con otros sensores, podemos esperar un rendimiento aún mejor en entornos desafiantes y un posicionamiento más preciso para aplicaciones especializadas. Al mantenerse informado sobre estos desarrollos y comprender cómo optimizar su configuración actual, puede garantizar que su sistema de navegación de drones funcione al máximo.


