GNSS-Technologie: Ein umfassender Leitfaden für sichere Navigation
Während "GPS" oft als allgemeiner Begriff für die Satellitennavigation in Drohnen verwendet wird, nutzen moderne Navigationssysteme tatsächlich mehrere Satellitenkonstellationen, die zusammen als GNSS (Global Navigation Satellite Systems) bekannt sind. Nach Jahren des Baus und Fliegens von Drohnen mit verschiedenen Navigationssystemen habe ich aus erster Hand gesehen, wie eine ordnungsgemäße GNSS-Implementierung den Unterschied zwischen einer Drohne, die zuverlässig nach Hause zurückkehrt, und einer, die zu einem teuren Baumschmuck wird, ausmachen kann. Dieser umfassende Leitfaden untersucht die verschiedenen Satellitennavigationssysteme, ihre Eigenschaften, die Entwicklung von GNSS-Empfängermodulen und wie diese Technologien die Navigationsfähigkeiten von Drohnen verbessern.
Einführung in die GNSS-Technologie
GNSS (Global Navigation Satellite System) bezieht sich auf die Konstellation von Satelliten, die Signale aus dem Weltraum bereitstellen, die Positions- und Zeitdaten an GNSS-Empfänger übertragen. Diese Empfänger verwenden dann diese Daten, um den Standort zu bestimmen. Während GPS das bekannteste GNSS ist, gibt es mehrere andere Systeme und moderne Empfänger verwenden oft mehrere Systeme gleichzeitig für eine verbesserte Leistung.

Ich erinnere mich noch an meine erste GPS-ausgestattete Drohne im Jahr 2020. Sie verwendete ein primitives Ublox LEA-6H-Modul, das fast zwei Minuten brauchte, um eine Positionsbestimmung zu erhalten, und während des Schwebens mehrere Meter abdriftete. Heute fliege ich mit Multi-Konstellations-Empfängern, die in Sekunden einrasten und die Position mit bemerkenswerter Präzision halten. Die Entwicklung war für die Fähigkeiten von Drohnen nichts weniger als revolutionär.
Die Entwicklung der Satellitennavigation
Die Satellitennavigation hat sich seit ihren Anfängen dramatisch weiterentwickelt:
• Militärische Ursprünge (1970er-1980er Jahre): GPS wurde vom US-Verteidigungsministerium für militärische Anwendungen entwickelt. Die Technologie war streng kontrolliert und in zivilen Anwendungen begrenzt.
• Ziviler Zugang (1990er Jahre): Die Selective Availability-Richtlinie machte GPS für die zivile Nutzung absichtlich weniger genau. Frühe GPS-Geräte hatten Fehler von über 100 Metern!
• Vollständiger ziviler Zugang (2000er Jahre): Die Aufhebung von Selective Availability ermöglichte präzise zivile Anwendungen. Dies war ein Wendepunkt, der die Tür für eine zuverlässige Drohnennavigation öffnete.
• Multi-Konstellations-Ära (2010er Jahre): Die Entwicklung und der Einsatz alternativer Systeme wie GLONASS, Galileo und BeiDou schufen Redundanz und verbesserten die Leistung. Ich bemerkte eine deutliche Verbesserung der Navigationszuverlässigkeit meiner Drohnen, als ich um 2022 von GPS-only auf GPS+GLONASS-Module umstieg.
• Moderne Integration (Gegenwart): Multi-Konstellations-Empfänger sind in Verbrauchergeräten zum Standard geworden. Heute können sogar günstige Drohnen gleichzeitig auf über 30 Satelliten zugreifen, um eine Positionierung im Zentimeterbereich zu erreichen.
Grundprinzipien der Satellitennavigation
Alle GNSS-Systeme arbeiten nach ähnlichen Prinzipien, obwohl das Verständnis dieser Grundlagen mir im Laufe der Jahre bei der Fehlerbehebung unzähliger Navigationsprobleme geholfen hat:
- Satellitenkonstellation: Ein Netzwerk von Satelliten, die die Erde umkreisen, sendet präzise Zeit- und Positionssignale. Je mehr Satelliten Ihr Empfänger "sehen" kann, desto besser ist Ihre Positionsgenauigkeit.
- Signalübertragung: Diese Satelliten senden präzise Zeit- und Positionsinformationen auf bestimmten Funkfrequenzen. Die Signale sind unglaublich schwach, wenn sie die Erde erreichen - etwa die gleiche Leistung wie eine 50-Watt-Glühbirne aus 12.000 Meilen Entfernung betrachtet!
- Trilateration: Der Empfänger Ihrer Drohne berechnet die Position, indem er die Zeitverzögerungen von mehreren Satelliten misst. Ich erkläre das gerne so, dass der Empfänger fragt: "Wie weit bin ich von Satellit A entfernt? Wie weit von Satellit B?" und so weiter, und dann die einzig mögliche Position bestimmt, die all diese Entfernungen erfüllt.
- Mindestanforderungen: Sie benötigen mindestens 4 Satelliten für eine 3D-Positionierung (Breitengrad, Längengrad, Höhe). Durch Erfahrung habe ich gelernt, dass 4 Satelliten zwar funktionieren, aber für eine zuverlässige Drohnennavigation wirklich 8+ benötigt werden.
- Fehlerkorrektur: Verschiedene Techniken verbessern die Genauigkeit, indem sie atmosphärische Verzögerungen, Uhrenfehler und andere Faktoren berücksichtigen. Moderne Empfänger sind dabei bemerkenswert gut, weshalb heutige Drohnen ihre Position so präzise halten können.
Wichtige Leistungskennzahlen
Mehrere Faktoren bestimmen die GNSS-Leistung, und das Verständnis dieser Faktoren hat mir geholfen, die richtigen Module für verschiedene Anwendungen auszuwählen:
• Genauigkeit: Wie nah die gemessene Position an der tatsächlichen Position liegt. Für die Standard-Drohnennavigation reicht in der Regel eine Genauigkeit von 2-3 Metern aus, aber für Kartierungs- oder Präzisionsanwendungen benötigen Sie möglicherweise eine Genauigkeit im Zentimeterbereich.
• Verfügbarkeit: Der Prozentsatz der Zeit, in der der Dienst nutzbar ist. Ich habe festgestellt, dass Multi-Konstellations-Empfänger diese Metrik dramatisch verbessern, insbesondere in anspruchsvollen Umgebungen wie Stadtgebieten oder unter teilweiser Baumbedeckung.
• Kontinuität: Die Fähigkeit, ohne Unterbrechung zu funktionieren. Dies ist entscheidend für autonome Missionen - ein kurzzeitiger GNSS-Ausfall während eines Langstreckenflugs kann katastrophal sein.
• Integrität: Vertrauen darauf, dass das System korrekte Informationen liefert. Moderne Empfänger verfügen über ausgefeilte Algorithmen zur Erkennung und Ablehnung fehlerhafter Messungen.
• Zeit bis zum ersten Fix (TTFF): Wie schnell eine Position ermittelt werden kann. Ich erinnere mich an die Tage, als ich mit einfacheren Empfängern mehrere Minuten auf eine GPS-Sperre vor dem Start warten musste - jetzt sind es mit modernen Modulen typischerweise Sekunden.
• Aktualisierungsrate: Wie oft die Position aktualisiert wird. Für Rennen oder dynamisches Fliegen sorgen höhere Aktualisierungsraten (10Hz+) für eine spürbar flüssigere Navigation.
Wichtige GNSS-Konstellationen
Im Laufe der Jahre habe ich Empfänger verwendet, die verschiedene Kombinationen dieser Systeme unterstützen, und jedes hat seine Stärken und Schwächen. Das Verständnis ihrer Unterschiede hat mir geholfen, meine Drohnen für verschiedene Flugbedingungen zu optimieren.
GPS (Global Positioning System)
Das ursprüngliche und am weitesten verbreitete Satellitennavigationssystem:
• Land/Region: Vereinigte Staaten
• Inbetriebnahme: 1978 (begrenzt), volle Betriebsfähigkeit 1995
• Satelliten: 31 betriebsbereite Satelliten (24 für globale Abdeckung erforderlich)
• Orbitale Eigenschaften:
- Mittlere Erdumlaufbahn bei etwa 20.200 km
- 6 Bahnebenen mit jeweils 4+ Satelliten
- 12-stündige Umlaufzeit
• Signalfrequenzen:
- L1 (1575,42 MHz) - Primäre zivile Frequenz
- L2 (1227,60 MHz) - Verwendet für militärische und fortgeschrittene zivile Anwendungen
- L5 (1176,45 MHz) - Neueste Frequenz für sicherheitskritische Anwendungen
• Genauigkeit:
- Standard Positioning Service (SPS): ~3-5 Meter
- Precise Positioning Service (PPS): ~<1 Meter (militärisch)
GPS ist seit Jahren das Rückgrat der Drohnennavigation, und ich halte es immer noch für das insgesamt zuverlässigste System. Ich bin in abgelegenen Gebieten weltweit geflogen, und die GPS-Abdeckung hat mich selten im Stich gelassen. Die Reife des Systems und das kontinuierliche Modernisierungsprogramm machen es zu einer zuverlässigen Wahl für die meisten Anwendungen.
Eine Einschränkung von GPS besteht darin, dass seine Leistung in hohen Breitengraden (in der Nähe der Pole) aufgrund der Satellitenumlaufbahn beeinträchtigt werden kann. Die Signale können auch durch städtische Schluchten und dichte Vegetation beeinflusst werden, weshalb der Zugang zu mehreren Konstellationen so wertvoll ist.
GLONASS (GLObal NAvigation Satellite System)
Russlands Alternative zu GPS ist zu einer wichtigen Ergänzung in modernen Empfängern geworden:
• Land/Region: Russland
• Inbetriebnahme: 1982 (eingeschränkt), vollständige Betriebsfähigkeit 2011 wiederhergestellt
• Satelliten: 24 betriebsbereite Satelliten
• Umlaufbahneigenschaften:
- Mittlere Erdumlaufbahn bei etwa 19.100 km
- 3 Bahnebenen mit jeweils 8 Satelliten
- 11 Stunden 15 Minuten Umlaufzeit
• Signalfrequenzen:
- L1 (1598,0625 - 1605,375 MHz)
- L2 (1242,9375 - 1248,625 MHz)
- L3 (1202,025 MHz)
• Genauigkeit:
- Standardpräzision: ~4-7 Meter
- Hohe Präzision: ~<1 Meter (militärisch)
Ich habe GLONASS-Fähigkeit erstmals um 2022 zu meinen Drohnen hinzugefügt, und die Verbesserung war sofort spürbar. Das System funktioniert besonders gut in hohen Breitengraden – ich bin in Nordnorwegen geflogen, wo GLONASS-Satelliten oft zahlreicher waren als GPS in der Sicht meines Empfängers.
GLONASS ergänzt GPS in kombinierten Empfängern extrem gut. Während es historisch gesehen weniger stabil als GPS war (in den 1990er Jahren gab es eine Zeit, in der das System fast zusammenbrach), ist das moderne GLONASS sehr zuverlässig. Ich habe festgestellt, dass die Aktivierung beider Systeme eine hervorragende Redundanz bietet – wenn ein System Probleme hat, sorgt das andere dafür, dass Ihre Drohne sicher navigiert.
Galileo
Das zivil kontrollierte GNSS der Europäischen Union ist der neueste große Akteur, und ich bin von seiner Leistung beeindruckt:
• Land/Region: Europäische Union
• Inbetriebnahme: 2016 (erste Dienste), vollständige Betriebsfähigkeit bis 2026 erwartet
• Satelliten: 28 geplant (24 betriebsbereit + 4 Ersatz), derzeit 26 im Orbit
• Umlaufbahneigenschaften:
- Mittlere Erdumlaufbahn bei etwa 23.222 km
- 3 Bahnebenen mit jeweils 8-10 Satelliten
- 14-stündige Umlaufzeit
• Signalfrequenzen:
- E1 (1575,42 MHz) - Wie GPS L1
- E5a (1176,45 MHz) - Wie GPS L5
- E5b (1207,14 MHz)
- E6 (1278,75 MHz)
• Genauigkeit:
- Offener Dienst: ~1-3 Meter
- Hochpräziser Dienst: ~20 cm
- Öffentlich regulierter Dienst: Verschlüsselt für staatliche Nutzung
Als ich Galileo um 2022 erstmals auf meinen Drohnen aktivierte, war ich skeptisch, ob es einen spürbaren Unterschied machen würde. Zu meiner Überraschung tat es das – insbesondere in städtischen Umgebungen, wo Gebäude einige Satellitensignale blockieren können. Die zusätzlichen Galileo-Satelliten in Sichtweite sorgten für eine konsistentere Navigationsleistung.
Galileo wurde speziell für zivile Anwendungen entwickelt und bietet eine höhere Genauigkeit als Standard-GPS. Ich schätze seine fortschrittliche Integritätsüberwachung, die dazu beiträgt, unzuverlässige Signale zu erkennen und zu mindern. Das System ist auch vollständig interoperabel mit GPS, was die Integration in moderne Empfänger nahtlos macht.
Obwohl Galileo noch nicht voll einsatzfähig ist, bietet es bereits einen hervorragenden Service. Die einzige Einschränkung, auf die ich gestoßen bin, ist, dass einige ältere Empfänger es nicht unterstützen, aber jedes moderne GNSS-Modul wird diese Satelliten voll ausnutzen.
BeiDou (BDS)
Chinas Satellitennavigationssystem hat sich rasant zu einem globalen Akteur entwickelt:
• Land/Region: China
• Inbetriebnahme: BeiDou-1 (2000), BeiDou-2 (2012), BeiDou-3 (2020)
• Satelliten: 35 betriebsbereite Satelliten
• Umlaufbahneigenschaften:
- Mischung aus mittlerer Erdumlaufbahn (27 Satelliten bei 21.500 km)
- Geostationäre Erdumlaufbahn (5 Satelliten)
- Geneigte geosynchrone Umlaufbahn (3 Satelliten)
• Signalfrequenzen:
- B1I (1561,098 MHz)
- B1C (1575,42 MHz) - Wie GPS L1
- B2a (1176,45 MHz) - Wie GPS L5
- B2b (1207,14 MHz) - Wie Galileo E5b
- B3I (1268,52 MHz)
• Genauigkeit:
- Globaler Dienst: ~3-5 Meter
- Regionaler Dienst: ~2-3 Meter
Ich begann um 2022 mit der Verwendung von BeiDou-fähigen Empfängern, und das System hat sich als wertvolle Ergänzung des GNSS-Ökosystems erwiesen. Das Besondere an BeiDou ist sein hybrides Konstellationsdesign mit Satelliten in verschiedenen Umlaufbahntypen. Dies bietet eine verbesserte Abdeckung in der asiatisch-pazifischen Region, wo ich eine besonders starke Leistung festgestellt habe.
Eine interessante Funktion von BeiDou, die andere Systeme nicht haben, ist die Messaging-Fähigkeit – das System kann tatsächlich kurze Textnachrichten übertragen, obwohl dies in Drohnenanwendungen normalerweise nicht verwendet wird. Der vollständige globale Dienst wurde 2020 fertiggestellt, wodurch BeiDou zum neuesten vollständigen globalen Navigationssystem wurde.
Meiner Erfahrung nach war die BeiDou-Integration in modernen Empfängern nahtlos, obwohl die Dokumentation in englischer Sprache in den Anfängen begrenzt war. Heute ist es ein Standardbestandteil von Multi-Constellation-Empfängern und trägt wesentlich zur gesamten Navigationsleistung bei.
Regionale Systeme
Zusätzlich zu den globalen Systemen gibt es mehrere regionale GNSS-Systeme, die in bestimmten Gebieten zusätzliche Vorteile bieten können:
QZSS (Quasi-Zenith Satellite System)
• Land/Region: Japan
• Abdeckung: Japan und asiatisch-ozeanische Region
• Satelliten: 4 betriebsbereite Satelliten
QZSS ist für die städtischen Schluchten Japans ausgelegt, mit Satelliten in Umlaufbahnen, die sie in großer Höhe über Japan halten. Ich habe Leute mit QZSS-fähigen Empfängern in Tokio fliegen sehen, und die Verbesserung der städtischen Leistung war spürbar – die Positionshalterungen waren zwischen hohen Gebäuden stabiler als mit globalen Konstellationen allein.
NavIC (Navigation with Indian Constellation)
• Land/Region: Indien
• Abdeckung: Indien und umliegende Region (1.500 km)
• Satelliten: 7 betriebsbereite Satelliten
NavIC ist für den indischen Subkontinent optimiert. Obwohl ich es nicht persönlich ausgiebig getestet habe, berichten Kollegen, die in Indien fliegen, von guten Ergebnissen, wenn ihre Empfänger dieses regionale System zusätzlich zu den globalen Konstellationen unterstützen.
Vorteile von Multi-Constellation für Drohnen
Die gleichzeitige Verwendung mehrerer GNSS-Konstellationen bietet mehrere Vorteile für den Drohnenbetrieb. Ich habe diese Vorteile aus erster Hand erfahren, als ich meine Navigationssysteme im Laufe der Jahre aufgerüstet habe.
Verbesserte Satellitenverfügbarkeit
Der unmittelbarste Vorteil von Multi-Constellation-Empfängern besteht einfach darin, dass mehr Satelliten in Sichtweite sind:
• Mehr sichtbare Satelliten: Kombinierte Konstellationen bieten unter offenen Himmelsbedingungen mehr als 30 sichtbare Satelliten. Ich sehe regelmäßig 20-25 Satelliten, verglichen mit nur 8-10 bei GPS allein.
• Leistung in städtischen Schluchten: Bessere Positionierung in Städten und abgeschatteten Bereichen. Ich bin zwischen Gebäuden geflogen, wo GPS-Only-Empfänger den Kontakt verlieren würden, aber Multi-Constellation-Systeme eine stabile Navigation aufrechterhielten.
• Reduzierte geometrische Verwässerung der Präzision (GDOP): Mehr Satelliten bedeuten eine bessere Geometrie und eine genauere Positionierung. Dies führt zu präziserem Schweben und genauerer Navigation.
• Praktische Auswirkungen: Ich erlebe während des Fluges weniger GPS-Ausfälle, insbesondere in anspruchsvollen Umgebungen. Dies hat bereits mehrere meiner Drohnen vor möglichem Wegfliegen oder Abstürzen bewahrt.
Verbesserte Genauigkeit
Mehrere Konstellationen, die zusammenarbeiten, verbessern die Gesamtgenauigkeit der Positionierung:
• Fehlerdurchschnitt: Mehrere Systeme helfen dabei, individuelle Systemfehler zu mitteln. Ich habe beobachtet, dass sich die Positionshaltung von ±3 Metern mit GPS allein auf eine Präzision im Submeterbereich mit Multi-Konstellation-Empfängern verbessert hat.
• Kreuzvalidierung: Positionen von verschiedenen Systemen können sich gegenseitig validieren und Ausreißer ausschließen. Dadurch wurden die gelegentlichen Positions-"Sprünge", die ich früher mit Einzelkonstellation-Empfängern sah, eliminiert.
• Verbesserte Präzision: Positionsberechnungen mit mehr Satelliten sind im Allgemeinen präziser. Dies ist besonders bei der Höhenhaltung spürbar, die tendenziell die schwächste Dimension bei der GNSS-Positionierung ist.
• Praktische Auswirkungen: Meine Drohnen halten nun eine stabilere Position und Navigation, was autonome Missionen zuverlässiger und Videoaufnahmen flüssiger macht.
Systemredundanz
Der vielleicht wichtigste Vorteil für kritische Drohneneinsätze ist die Redundanz:
• Ausfallschutz: Wenn ein System Probleme hat, können andere kompensieren. Einmal flog ich durch ein Gebiet mit GPS-Störung (wahrscheinlich unbeabsichtigt), aber meine Drohne navigierte weiterhin normal mit GLONASS und Galileo.
• Störfestigkeit: Unterschiedliche Frequenzen erschweren eine vollständige Störung. Dies ist besonders wichtig für professionelle Einsätze, bei denen die Signalintegrität entscheidend ist.
• Spoofing-Erkennung: Diskrepanzen zwischen Systemen können auf Spoofing-Versuche hinweisen. Obwohl selten, ist GPS-Spoofing ein wachsendes Problem für sensible Drohneneinsätze.
• Praktische Auswirkungen: Ich habe festgestellt, dass die Rückkehr-nach-Hause- und autonomen Funktionen mit Multi-Konstellation-Empfängern deutlich zuverlässiger sind. Dies sorgt für Seelenfrieden bei Langstreckenflügen.
Schnellere Erfassung
Eine schnelle Positionsbestimmung ist wichtig für effiziente Feldeinsätze:
• Parallele Verarbeitung: Empfänger können Signale von mehreren Systemen gleichzeitig erfassen. Dies reduziert die Wartezeit vor dem Start drastisch.
• Reduzierte TTFF: Schnellere Positionsbestimmung beim Start. Was früher Minuten dauerte, dauert jetzt Sekunden.
• Verbesserung des Kaltstarts: Besonders vorteilhaft für Kaltstarts, wenn der Empfänger keine aktuellen Satellitendaten hat. Ich habe gesehen, wie die Kaltstartzeiten von über 60 Sekunden auf unter 30 Sekunden mit Multi-Konstellation-Empfängern gesunken sind.
• Praktische Auswirkungen: Ein schnellerer GPS-Fix vor dem Start bedeutet weniger Wartezeit und mehr Flugzeit. Dies ist besonders wertvoll in professionellen Umgebungen, wo Zeit Geld ist.
Evolution der GNSS-Empfänger für Drohnen
Ich habe fast jede Generation von GNSS-Empfängern in meinen Drohnen verwendet, und die Entwicklung war bemerkenswert. Jede Generation hat bedeutende Verbesserungen in Leistung, Größe und Fähigkeiten gebracht.
Empfängergenerationen
Frühes Drohnen-GPS (2010-2014)
Meine ersten GPS-ausgestatteten Drohnen verwendeten Module wie das Ublox LEA-6 und NEO-6. Diese waren damals revolutionär, aber nach heutigen Maßstäben primitiv:
• Merkmale:
- Nur GPS-Empfang
- Langsamere Aktualisierungsraten (1-5Hz)
- Geringere Empfindlichkeit
- Größere Abmessungen
- Höherer Stromverbrauch
• Leistung:
- Genauigkeit: 5-10 Meter
- TTFF: 45-60 Sekunden Kaltstart
- Satellitenkapazität: 12-16 Kanäle
Ich erinnere mich an die Frustration, vor jedem Flug auf einen GPS-Fix zu warten, oft minutenlang auf einem offenen Feld stehend. Die Positionshaltung war bestenfalls ungefähr, wobei die Drohne in jede Richtung mehrere Meter abdriftete. Die Rückkehr nach Hause war eine nervenaufreibende Erfahrung - man wusste nie genau, wo die Drohne "zu Hause" sein würde!
Mittelgeneration GNSS (2015-2018)
Irgendwann stieg ich auf Module wie das Ublox NEO-7 und NEO-M8N um, was erhebliche Verbesserungen brachte:
• Merkmale:
- GPS + GLONASS-Empfang
- Moderate Aktualisierungsraten (5-10Hz)
- Verbesserte Empfindlichkeit
- Kleinere Formfaktoren
- Reduzierter Stromverbrauch
• Leistung:
- Genauigkeit: 2-5 Meter
- TTFF: 30-45 Sekunden Kaltstart
- Satellitenkapazität: 32-72 Kanäle
Die Ergänzung von GLONASS war ein Wendepunkt für die Zuverlässigkeit. Ich bemerkte sofort, dass meine Drohnen die Positionsbestimmung in Gebieten beibehielten, in denen sie zuvor Schwierigkeiten hatten. Das M8N wurde in dieser Zeit zum Arbeitstier der Drohnennavigation - ich habe immer noch mehrere Drohnen mit diesen Modulen im Einsatz.
Modernes GNSS (2019-2022)
Im Jahr 2022 begann ich, meine Flotte auf Module wie das Ublox NEO-M9N und SAM-M8Q aufzurüsten:
• Merkmale:
- Multi-Konstellation (GPS, GLONASS, Galileo, BeiDou)
- Schnellere Aktualisierungsraten (10-18Hz)
- Hohe Empfindlichkeit
- Kompakte Designs
- Energieeffizienter Betrieb
• Leistung:
- Genauigkeit: 1-3 Meter
- TTFF: 15-30 Sekunden Kaltstart
- Satellitenkapazität: 72-184 Kanäle
Die Leistungsverbesserung war erheblich. Die Positionshaltung wurde felsensolide und die Genauigkeit der Rückkehr nach Hause verbesserte sich auf bis zu einen Meter vom Startpunkt entfernt. Die Möglichkeit, alle vier großen Konstellationen gleichzeitig zu nutzen, bot eine hervorragende Redundanz und Leistung in anspruchsvollen Umgebungen.
Neueste Generation (2023-Gegenwart)
Meine neuesten Builds verwenden hochmoderne Module wie das Ublox NEO-M10 und ZED-F9P (für RTK-Anwendungen):
• Merkmale:
- Vollständige Multi-Konstellation, Multi-Frequenz
- Hohe Aktualisierungsraten (bis zu 25Hz)
- Extrem hohe Empfindlichkeit
- Ultrakompakte Gehäuse
- Sehr geringer Stromverbrauch
- RTK-Fähigkeit in High-End-Modellen
• Leistung:
- Genauigkeit: 0,5-2 Meter (Standard), 1-3cm (RTK)
- TTFF: 5-15 Sekunden Kaltstart
- Satellitenkapazität: 184+ Kanäle
Diese neuesten Module stellen einen Quantensprung in der Leistung dar. Die M10-Serie bietet eine außergewöhnliche Empfindlichkeit und Energieeffizienz, während der F9P RTK-Präzision auf Vermessungsniveau für Consumer-Drohnen bietet. Ich war besonders beeindruckt von ihrer Leistung in anspruchsvollen Umgebungen wie Stadtgebieten und leichtem Waldbestand.
Detaillierter Blick auf beliebte Drohnen-GNSS-Module
Im Laufe der Jahre habe ich die meisten der gängigen GNSS-Module in verschiedenen Builds verwendet. Hier ist meine Einschätzung ihrer Fähigkeiten und idealen Anwendungen:
Ublox NEO-M8N
Das Arbeitstier des Drohnen-GNSS für viele Jahre und immer noch weit verbreitet:
• Konstellationen: GPS, GLONASS, Galileo, BeiDou (gleichzeitiger Empfang von bis zu 3)
• Kanäle: 72 Tracking-Kanäle
• Aktualisierungsrate: Bis zu 10Hz (typisch 5Hz in Drohnen)
• Empfindlichkeit: -167dBm Tracking
• Genauigkeit: 2,5m CEP (Circular Error Probable)
• Stromverbrauch: 23mA @ 3,3V
Ich habe Dutzende von M8N-Modulen in verschiedenen Drohnen installiert, und sie bieten eine hervorragende Balance zwischen Leistung und Kosten. Das Modul unterstützt den gleichzeitigen Empfang von bis zu drei Konstellationen, obwohl ich typischerweise GPS+GLONASS für die beste Kombination aus Leistung und Energieeffizienz verwende.
Eine Einschränkung, die ich entdeckt habe, ist, dass die gleichzeitige Aktivierung aller Konstellationen manchmal zu Tracking-Problemen aufgrund der Kanalbeschränkungen führen kann. Für die meisten Anwendungen liefern GPS+GLONASS oder GPS+Galileo die besten Ergebnisse.

Das M8N ist immer noch eine solide Wahl für allgemeine Navigation, Return-to-Home und Positionshalten. Gängige Implementierungen sind der BN-180, BN-220 und viele integrierte FC-Module.
Ublox NEO-M9N
Der verbesserte Nachfolger des M8N, der signifikante Verbesserungen bietet:
• Konstellationen: GPS, GLONASS, Galileo, BeiDou (gleichzeitiger Empfang von allen)
• Kanäle: 184 Tracking-Kanäle
• Aktualisierungsrate: Bis zu 25Hz (typisch 10Hz in Drohnen)
• Empfindlichkeit: -167dBm Tracking
• Genauigkeit: 1,5m CEP (Circular Error Probable)
• Stromverbrauch: 45mA @ 3,3V (Erfassung), 34mA (Tracking)
Als ich meine Hauptlangstreckendrohne von einem M8N auf einen M9N aufrüstete, war der Unterschied sofort spürbar. Der M9N kann alle Konstellationen gleichzeitig ohne Kanalbeschränkungen verfolgen, was eine hervorragende Redundanz und Leistung bietet.
Die höhere Aktualisierungsrate (10Hz vs. 5Hz) führt zu einer flüssigeren Navigation und reaktionsschnelleren Positionsanpassungen. Ich habe festgestellt, dass der M9N besonders wertvoll für die Präzisionsnavigation und Wegpunktmissionen ist, wo die verbesserte Genauigkeit einen spürbaren Unterschied macht.

Ein Nachteil ist der etwas höhere Stromverbrauch, obwohl er im Kontext des gesamten Stromverbrauchs der Drohne immer noch vernachlässigbar ist. Gängige Implementierungen sind der Matek M9N-5883 und HGLRC M9N.
Ublox NEO-M10S
Die neueste Generation des Standard-GNSS, die die Grenzen der Leistung ausreizt:
• Konstellationen: GPS, GLONASS, Galileo, BeiDou, QZSS, NavIC (gleichzeitiger Empfang von allen)
• Kanäle: 184+ Tracking-Kanäle
• Aktualisierungsrate: Bis zu 25Hz
• Empfindlichkeit: -170dBm Tracking
• Genauigkeit: 1,0m CEP (Circular Error Probable)
• Stromverbrauch: 38mA @ 3,3V (volle Leistung), 12mA (Energiesparmodus)
Ich habe kürzlich begonnen, die M10-Serie in meinen neuesten Builds zu testen, und die Verbesserungen sind subtil, aber bedeutsam. Das herausragende Merkmal ist die außergewöhnliche Energieeffizienz - der Super-E-Modus kann den Stromverbrauch um bis zu 70% reduzieren und gleichzeitig die Leistung aufrechterhalten.
Die verbesserte Empfindlichkeit (-170dBm vs. -167dBm) führt zu einer besseren Leistung in anspruchsvollen Umgebungen wie städtischen Schluchten oder unter leichter Baumbedeckung. Ich habe eine konsistentere Satellitenverfolgung in Bereichen festgestellt, in denen frühere Generationen gelegentlich den Empfang verloren haben.

Der M10 ist ideal für Langstreckenmissionen, bei denen die Energieeffizienz eine Rolle spielt, und für das Fliegen in anspruchsvollen Umgebungen. Er ist auf dem Drohnenmarkt noch relativ neu, aber ich erwarte, dass er zum neuen Standard wird, wenn die Verfügbarkeit sich verbessert.
Ublox ZED-F9P
Das hochpräzise RTK-fähige Modul für professionelle Anwendungen:
• Konstellationen: GPS, GLONASS, Galileo, BeiDou (gleichzeitiger Empfang von allen)
• Kanäle: 184 Tracking-Kanäle
• Aktualisierungsrate: Bis zu 25Hz
• Empfindlichkeit: -167dBm Tracking
• Genauigkeit: 1,0m CEP Standard, 1cm + 1ppm mit RTK
• Stromverbrauch: 68mA @ 3,3V
Für meine Vermessungs- und Inspektionsdrohnen war der F9P transformativ. Der Multiband-Empfang (L1/L2/L5) und die RTK-Fähigkeit ermöglichen eine zentimetergenaue Positionierung, die für Präzisionsanwendungen unerlässlich ist.
Das Einrichten von RTK erfordert zusätzliche Komponenten - eine Basisstation oder einen NTRIP-Dienst für Korrekturen, plus eine Datenverbindung, um diese Korrekturen an die Drohne zu übertragen. Ich verwende eine 4G/LTE-Verbindung für meine Vermessungsdrohne, die es mir ermöglicht, NTRIP-Korrekturen von öffentlichen Diensten zu empfangen.

Der F9P ist für Standard-FPV- oder Fotografie-Drohnen überdimensioniert, aber er ist unverzichtbar für Kartierungs-, Vermessungs-, Präzisionslandwirtschafts- und automatisierte Landeanwendungen. Gängige Implementierungen sind der Here3 und Holybro H-RTK F9P.
Leitfaden zur Modulauswahl
Die Wahl des richtigen GNSS-Moduls hängt von Ihren spezifischen Anforderungen ab. Hier ist mein praktischer Rat basierend auf jahrelanger Erfahrung mit dem Bau und Fliegen verschiedener Konfigurationen:
Für die Grundnavigation
• Empfohlen: NEO-M8N oder gleichwertig
• Wichtige Überlegungen:
- Ausreichend für RTH und Positionshalten
- Gute Balance zwischen Leistung und Kosten
- Weit verbreitet in allen Navigationsfirmwares
- Enthält typischerweise einen Kompass
Ich verwende immer noch M8N-Module in vielen meiner Builds, weil sie kostengünstig sind und für die allgemeine Navigation gut funktionieren. Wenn Sie eine Standard-FPV-Drohne mit gelegentlichem Positionshalten und Return-to-Home-Anforderungen bauen, ist das M8N immer noch eine solide Wahl.
Für die fortgeschrittene Navigation
• Empfohlen: NEO-M9N oder gleichwertig
• Wichtige Überlegungen:
- Besser für Wegpunkt-Missionen
- Schnellere Positionsaktualisierungen
- Zuverlässiger in anspruchsvollen Umgebungen
- Das Upgrade lohnt sich für ernsthafte Navigation
Für meine autonomen Wegpunkt-Drohnen und Langstrecken-Builds habe ich mich auf das M9N festgelegt. Die verbesserte Genauigkeit und Aktualisierungsrate machen einen spürbaren Unterschied in der Navigationsleistung, und die Möglichkeit, alle Konstellationen gleichzeitig zu nutzen, verbessert die Zuverlässigkeit in unterschiedlichen Umgebungen.
Für professionelle Anwendungen
• Empfohlen: NEO-M10 oder ZED-F9P
• Wichtige Überlegungen:
- M10 für die beste Standard-GNSS-Leistung
- F9P, wenn Zentimeter-Präzision erforderlich ist
- Auswirkungen auf Stromverbrauch und Gewicht berücksichtigen
- Möglicherweise zusätzliche Einrichtung und Konfiguration erforderlich
Meine Vermessungs- und Kartierungsdrohnen verwenden den F9P für Positionierung mit Zentimeter-Genauigkeit. Für Langstrecken-Erkundungen, bei denen die Standard-Genauigkeit im Meterbereich ausreicht, die Zuverlässigkeit aber oberste Priorität hat, bietet der M10 die beste Kombination aus Leistung und Energieeffizienz.
Für Langstrecken/Ausdauer
• Empfohlen: NEO-M10 mit Energiemanagement
• Wichtige Überlegungen:
- Energieeffizienz wird entscheidend
- Zuverlässigkeit hat oberste Priorität
- Antennenqualität und -platzierung berücksichtigen
- Backup-Navigationssysteme empfohlen
Für meine Langstrecken-Builds haben Energieeffizienz und Zuverlässigkeit oberste Priorität. Der Super-E-Modus des M10 bietet hervorragende Energieeinsparungen bei gleichbleibender Leistung. Ich achte auch besonders auf die Antennenqualität und -platzierung, da der Signalempfang umso wichtiger wird, je weiter man fliegt.
Implementierung von GNSS-Modulen
Wie Sie Ihr GNSS-Modul implementieren, kann genauso wichtig sein wie die Wahl des Moduls. Ich habe durch Versuch und Irrtum viele Lektionen über die optimale Installation gelernt.
Hardware-Integration
Überlegungen zur Antenne
Die Antenne ist entscheidend für die GNSS-Leistung - eine Lektion, die ich auf die harte Tour lernen musste, nachdem ich mehrere Builds mit suboptimaler Antennenplatzierung gebaut hatte:
• Patch-Antennen: Am häufigsten in Drohnen-Modulen
- Vorteile: Kompakt, nach oben gerichtet, gute Himmelssicht
- Nachteile: Leistung variiert mit der Ausrichtung
- Best Practices: Flach montieren mit freier Sicht zum Himmel

Die meisten meiner Drohnen verwenden Patch-Antennen, die gut funktionieren, wenn sie flach auf der oberen Platte mit freier Sicht zum Himmel montiert werden. Ich habe festgestellt, dass selbst eine leichte Neigung die Leistung beeinträchtigen kann, daher achte ich sorgfältig darauf, dass die Antenne perfekt waagerecht ausgerichtet ist.
• Helixantennen: In einigen Hochleistungsmodulen zu finden
- Vorteile: Besserer Empfang bei niedrigen Elevationen, weniger ausrichtungsempfindlich
- Nachteile: Größer, teurer
- Best Practices: Benötigt immer noch eine angemessene Himmelsfreiheit

Für meine Langstrecken-Builds bevorzuge ich trotz ihrer größeren Abmessungen Helixantennen. Sie sind weniger empfindlich gegenüber der Ausrichtung und bieten einen besseren Empfang, wenn die Drohne in Kurven geneigt ist, was hilft, die Satellitenverbindung während aggressiver Manöver aufrechtzuerhalten.
• Externe Antennen: Option für einige Module
- Vorteile: Flexible Platzierung, potenziell bessere Leistung
- Nachteile: Zusätzliches Gewicht, Komplexität, mögliche Beschädigung
- Best Practices: Hochwertiges Kabel verwenden, Länge minimieren
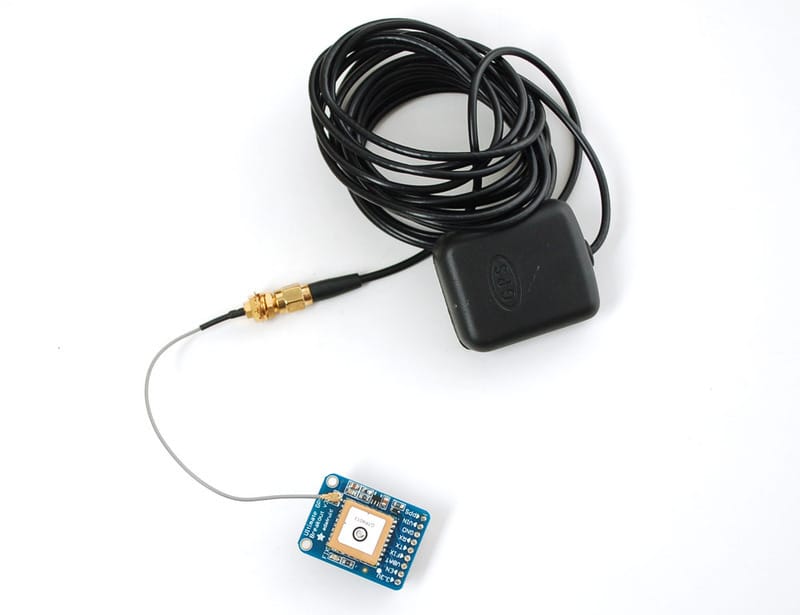
Ich verwende externe Antennen an meinen Kartierungsdrohnen, um die Antenne von Störquellen zu trennen. Der Schlüssel sind hochwertige, kurze Kabel - ich habe durch Erfahrung gelernt, dass billige Kabel das Signal erheblich beeinträchtigen können.
Massefläche
Die Massefläche beeinflusst die Antennenleistung - ein Detail, das viele Erbauer übersehen:
• Zweck: Reflektiert Signale und verbessert den Empfang
• Implementierung: Metallplatte oder PCB-Fläche unter der Antenne
• Größe: Idealerweise mindestens 60-80mm Durchmesser für optimale Leistung
• Alternativen: Einige Module enthalten eine integrierte Massefläche

Nach Experimenten mit verschiedenen Masseflächen-Konfigurationen habe ich festgestellt, dass eine einfache Aluminiumscheibe (ca. 70mm Durchmesser) unter dem GNSS-Modul den Empfang um 2-3dB verbessern kann - das entspricht einer 30-50% besseren Empfindlichkeit. Bei Modulen ohne eingebaute Masseflächen macht diese einfache Ergänzung einen spürbaren Unterschied bei der Satelliten-Erfassung und -Beibehaltung.
Montageort
Wo Sie das GNSS-Modul platzieren, spielt eine große Rolle:
• Stackmontage: Innerhalb des Rahmens
- Vorteile: Schutz vor Abstürzen
- Nachteile: Mögliche Störungen durch Elektronik, blockierte Himmelssicht
- Best Practices: Nur mit hochempfindlichen Modulen, Kohlefaser-Abschirmung
Ich habe versucht, GNSS-Module innerhalb des Rahmens zu stapeln, aber die Ergebnisse waren aufgrund der Signalblockierung durch die obere Platte enttäuschend. Ich empfehle diesen Ansatz nur für sehr kleine Builds, bei denen eine Montage oben nicht praktikabel ist, und nur mit hochempfindlichen Modulen.
• Obere Platte: Häufigster Montageort
- Vorteile: Klare Sicht zum Himmel, weg von Bodeninterferenzen
- Nachteile: Gefahr von Beschädigungen bei Abstürzen
- Best Practices: Wenn möglich, in der Mitte der Drohne platzieren

Die meisten meiner Drohnen haben das GNSS-Modul auf der oberen Platte montiert, was die beste Sicht zum Himmel bietet. Ich positioniere es typischerweise hinten in einer 3D-gedruckten Verlängerungsschale, um die Balance zu halten und den Einfluss der Rahmenneigung während des Fluges zu minimieren.
• Mastmontage: Erhöht über dem Rahmen
- Vorteile: Hervorragende Sicht zum Himmel, reduzierte Interferenzen
- Nachteile: Anfälligkeit bei Abstürzen, zusätzliches Gewicht
- Best Practices: Mit Schutzgehäuse verwenden

Für meine Mapping-Drohnen, bei denen die GNSS-Leistung entscheidend ist, verwende ich Masthalterungen, um die Antenne über alle potenziellen Störquellen zu heben. Der Schlüssel ist die Verwendung eines Schutzgehäuses oder Designs, das Abstürze überstehen kann - ich habe einige Antennen verloren, bis ich diese Lektion gelernt habe!
Interferenzminderung
GNSS-Signale sind sehr schwach und anfällig für Störungen - eine Tatsache, mit der ich durch die Fehlerbehebung bei schlechtem Empfang sehr vertraut geworden bin:
• Störquellen:
- Stromverteilungssysteme
- Videosender
- Motor- und ESC-Rauschen
- Abschirmung durch Kohlefaser
- Andere Funksysteme
• Minderungsstrategien:
- Abstand zu Stromleitungen und VTX halten
- Abgeschirmte Kabel für GNSS-Modul verwenden
- Ferritkerne an Stromleitungen anbringen
- HF-Abschirmmaterial in Betracht ziehen
- Antennen von Kohlefaser fernhalten
Eine der größten Lektionen, die ich gelernt habe, ist die Wichtigkeit, die GNSS-Antenne von Videosendern fernzuhalten. Bei einem Aufbau hatte ich anhaltende Empfangsprobleme, bis mir klar wurde, dass die VTX-Antenne nur 3 cm von der GPS-Antenne entfernt war. Das Verschieben auf die gegenüberliegende Seite des Rahmens löste das Problem sofort.
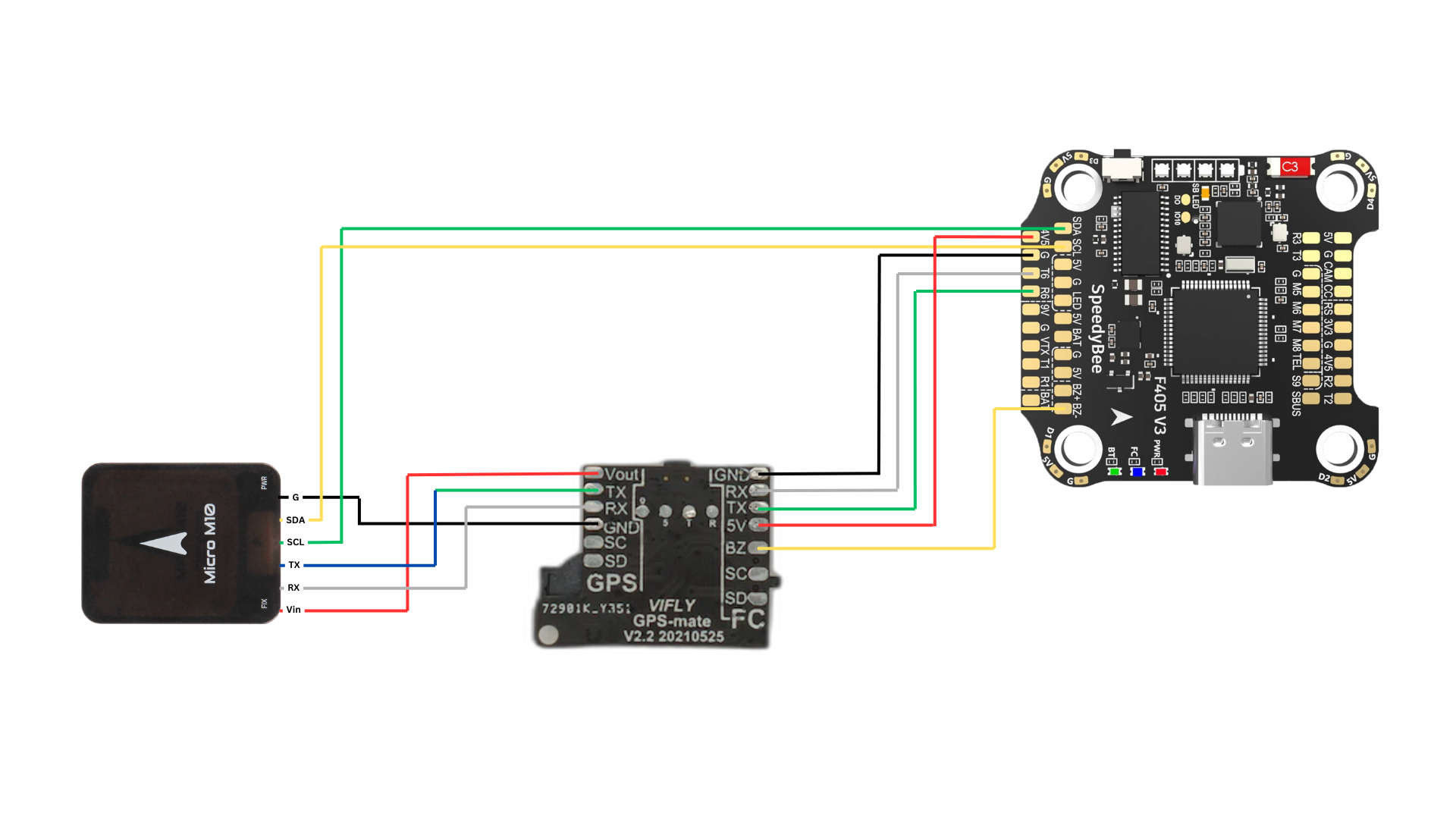
Leider wird der Platz bei den meisten meiner Aufbauten knapp und ich habe nicht immer die Möglichkeit, das GPS-Modul vollständig isoliert von anderen Antennen zu platzieren. In solchen Fällen sind Produkte wie GPS-mate echte Lebensretter.

Bei Aufbauten mit Kohlefaser-Deckplatten verwende ich immer einen nichtleitenden Abstandshalter, um das GNSS-Modul mindestens 10-15 mm über der Kohlefaser anzuheben. Diese einfache Änderung kann den Empfang dramatisch verbessern, indem sie verhindert, dass die Kohlefaser die Satellitensignale blockiert.
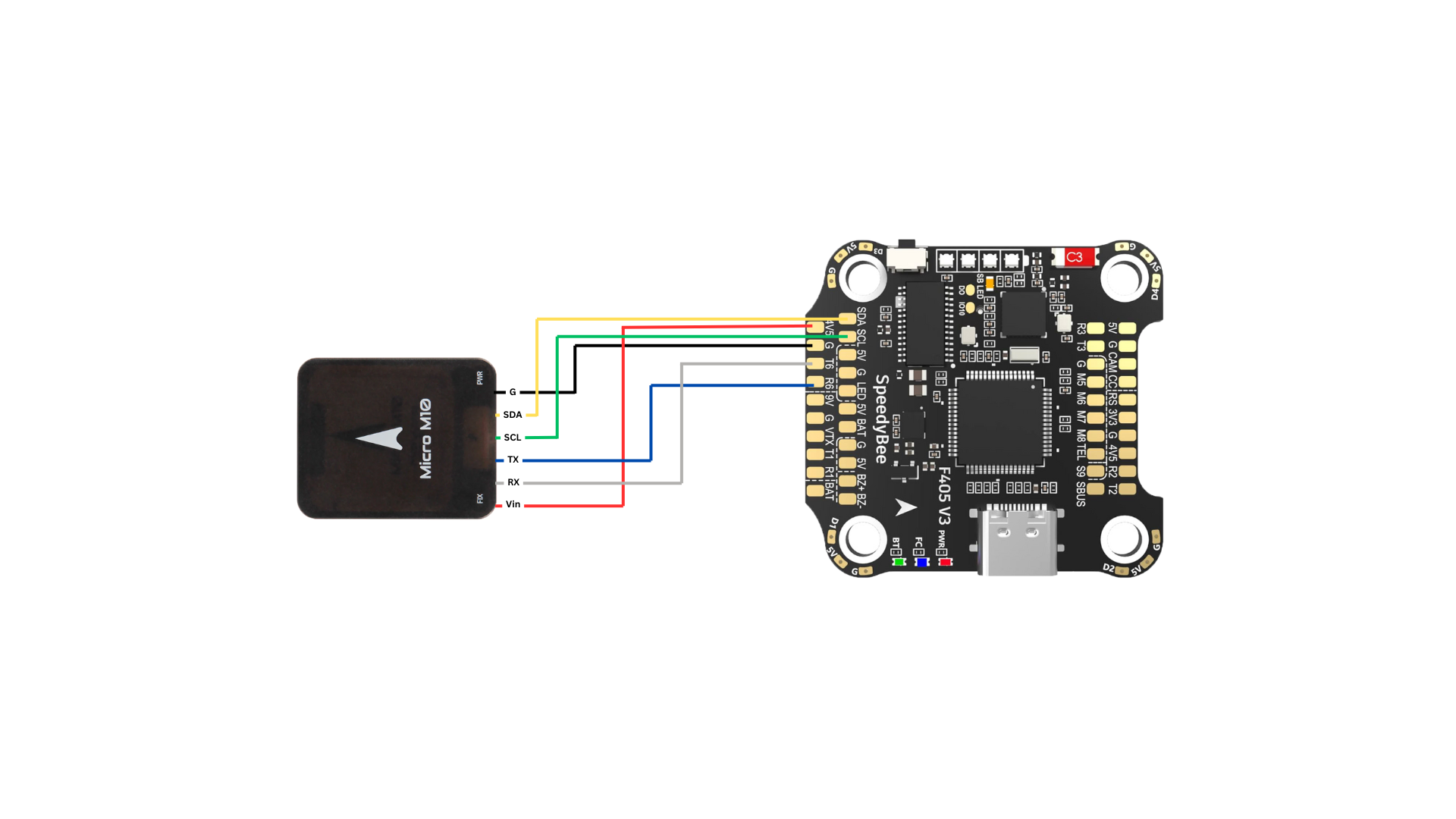
Verkabelung
Softwarekonfiguration
Firmware-Einstellungen
Moderne Flugsteuerungs-Firmware bietet verschiedene GNSS-Konfigurationsoptionen. Hier ist, was ich in verschiedenen Systemen als am besten geeignet empfunden habe:
INAV GNSS-Einstellungen
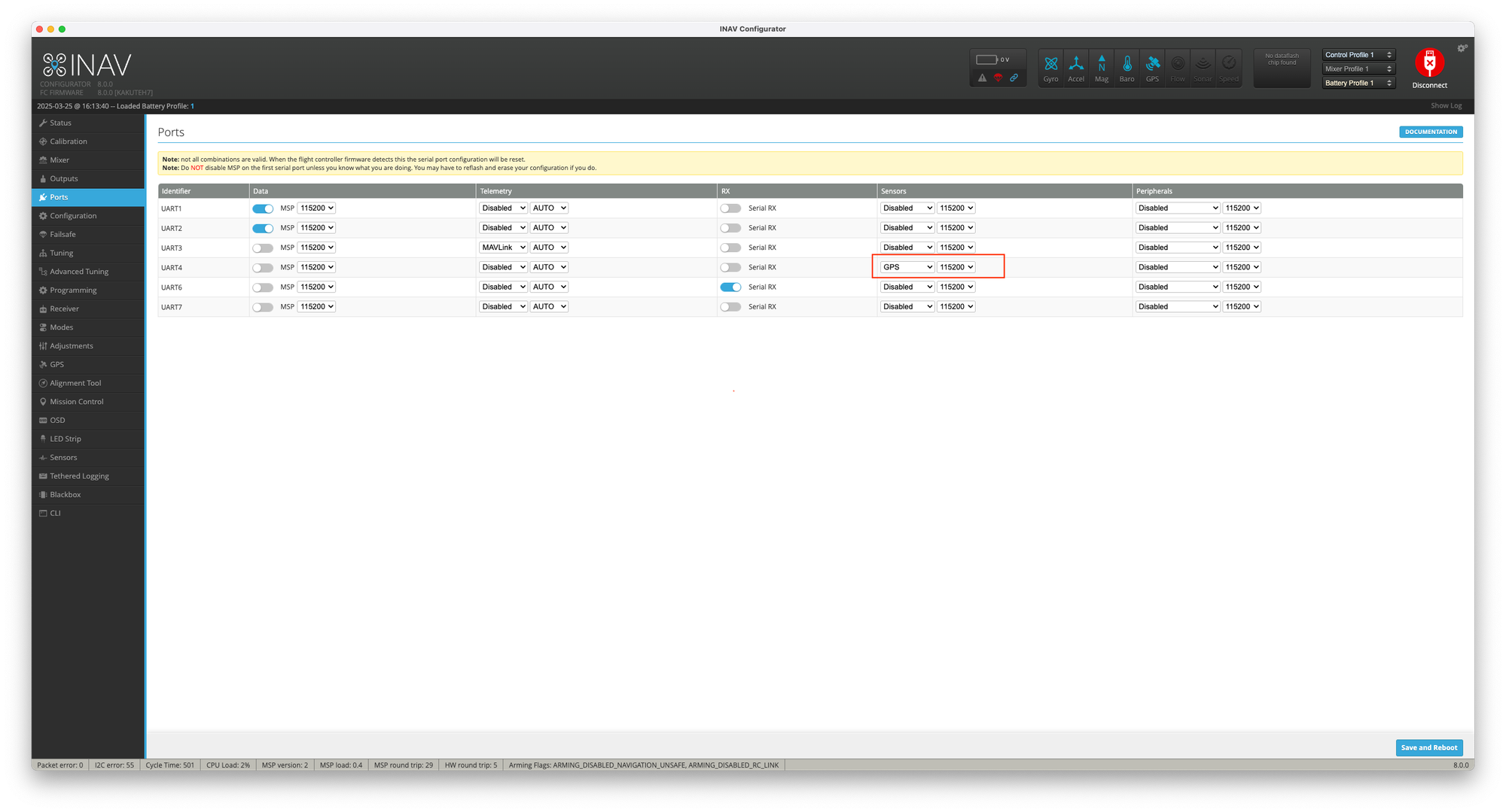
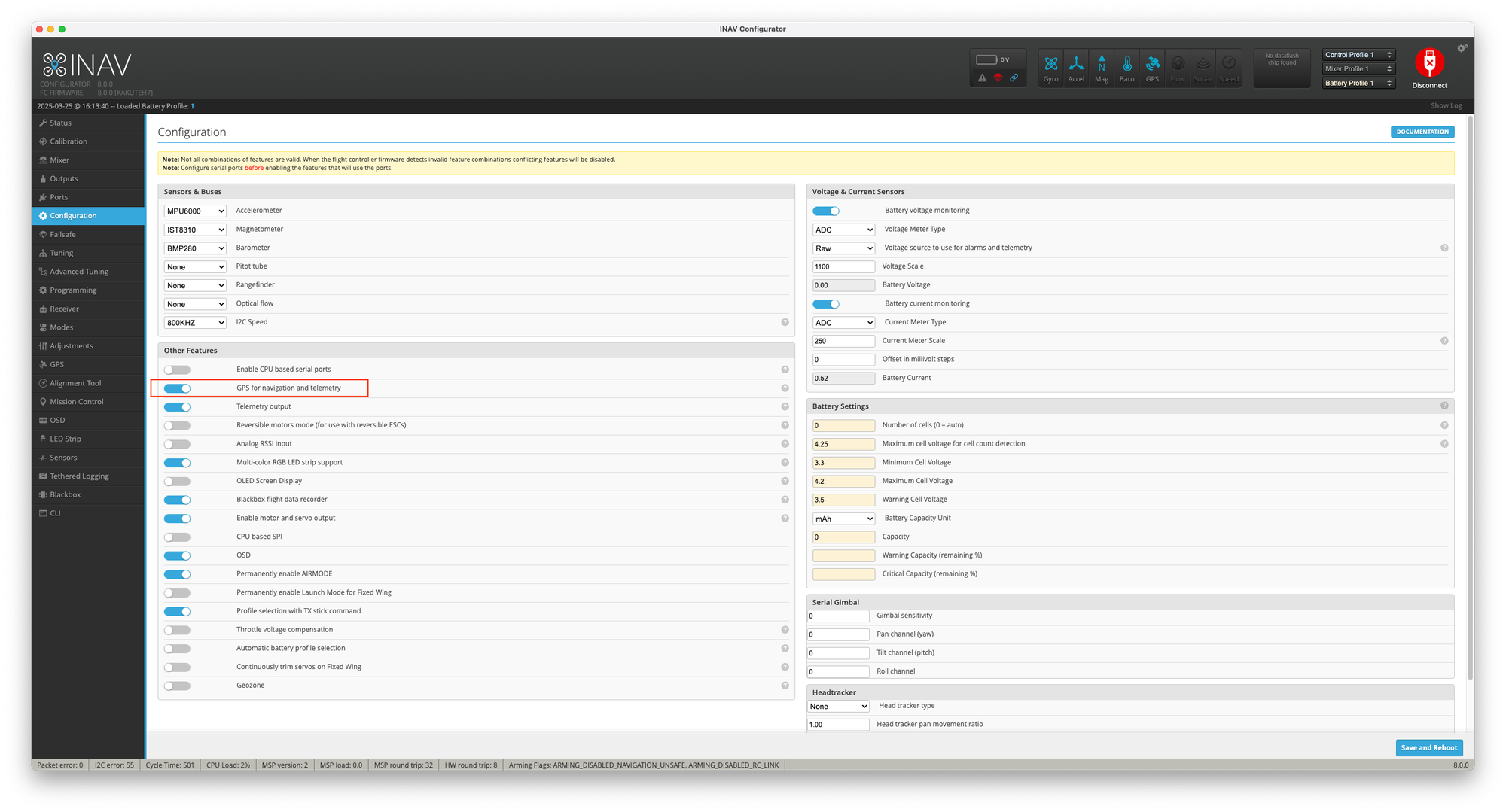
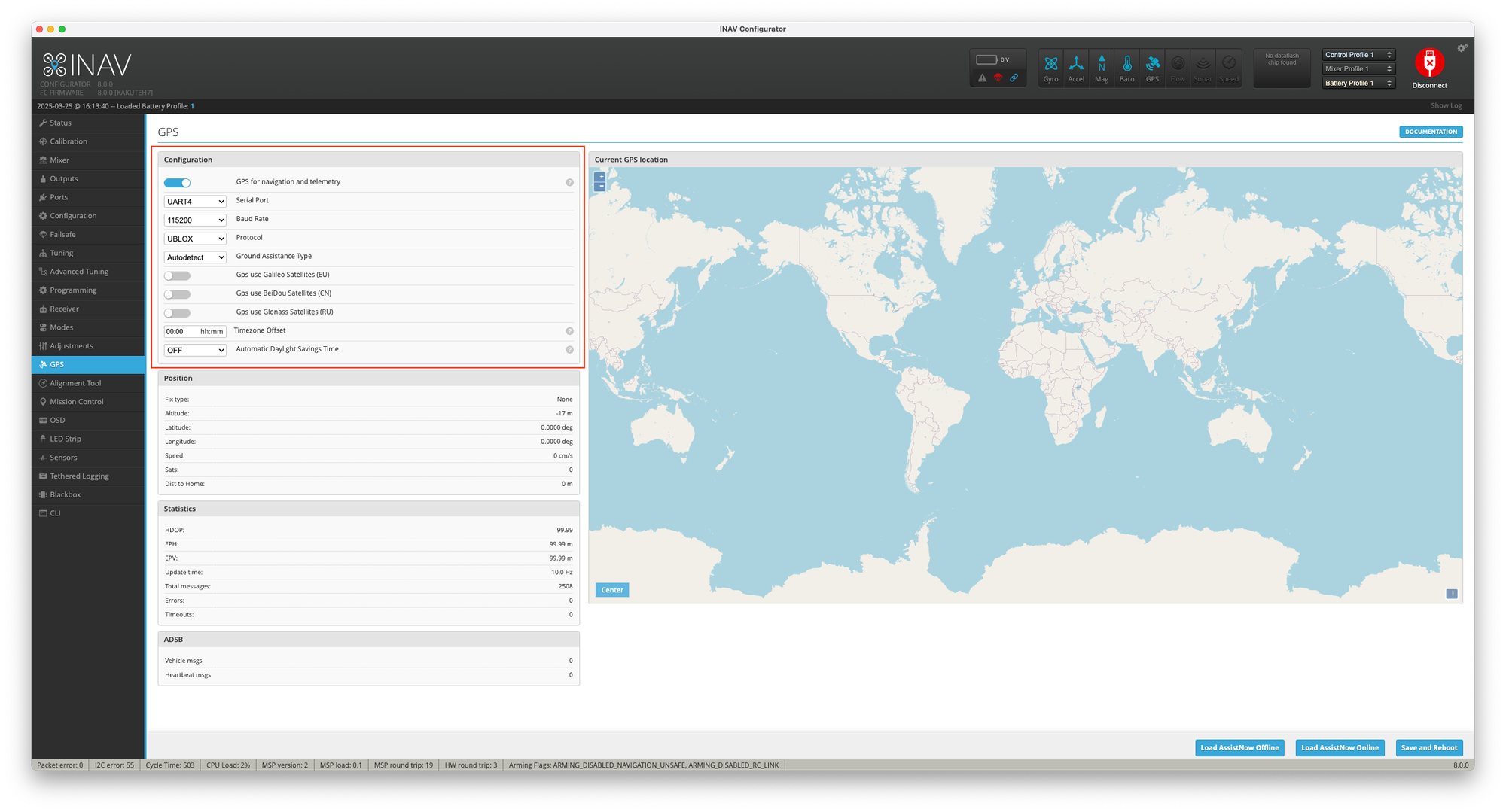
Ich habe festgestellt, dass die Kombination von GNSS mit Barometerdaten die stabilste Höhenhaltung bietet. Das Hinzufügen des Magnetometers (UBLOX+BARO+MAG) kann die Positionsschätzung in einigen Fällen verbessern, ist aber anfälliger für Störungen. Es wird zunehmend zum Trend, sich mit der Weiterentwicklung der GPS-Positionierungsgenauigkeit von Magnetometern zu entfernen.
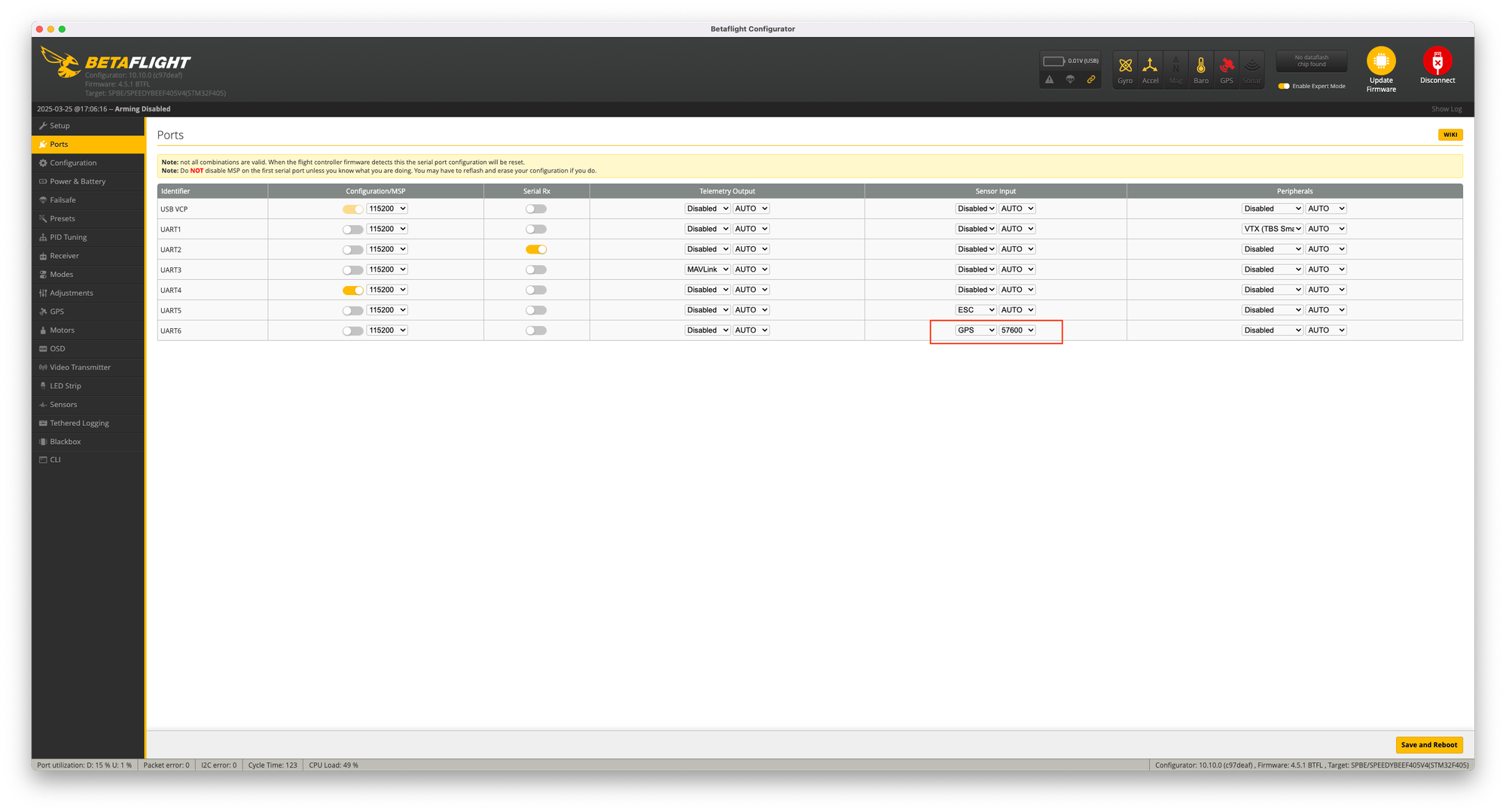
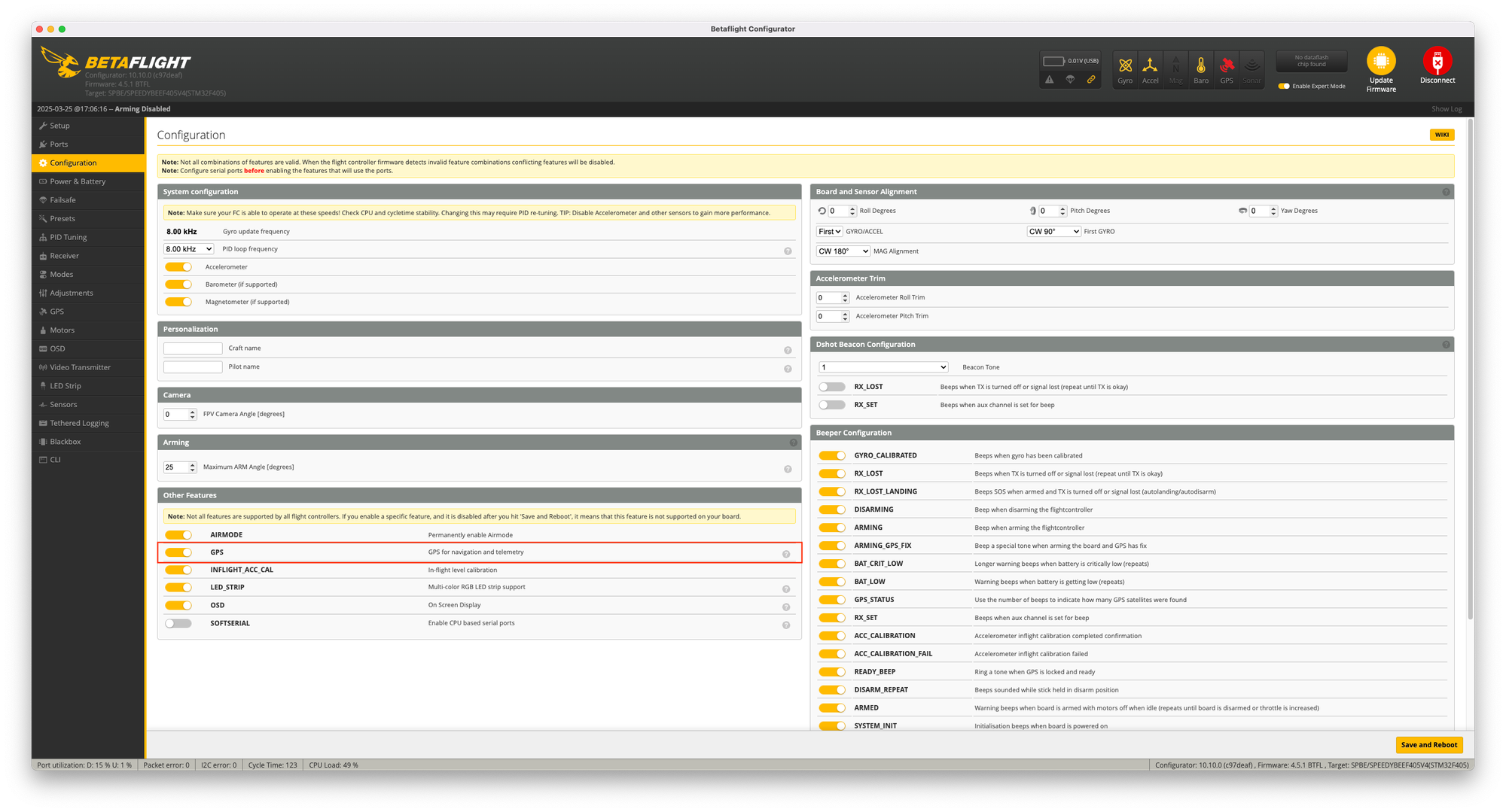
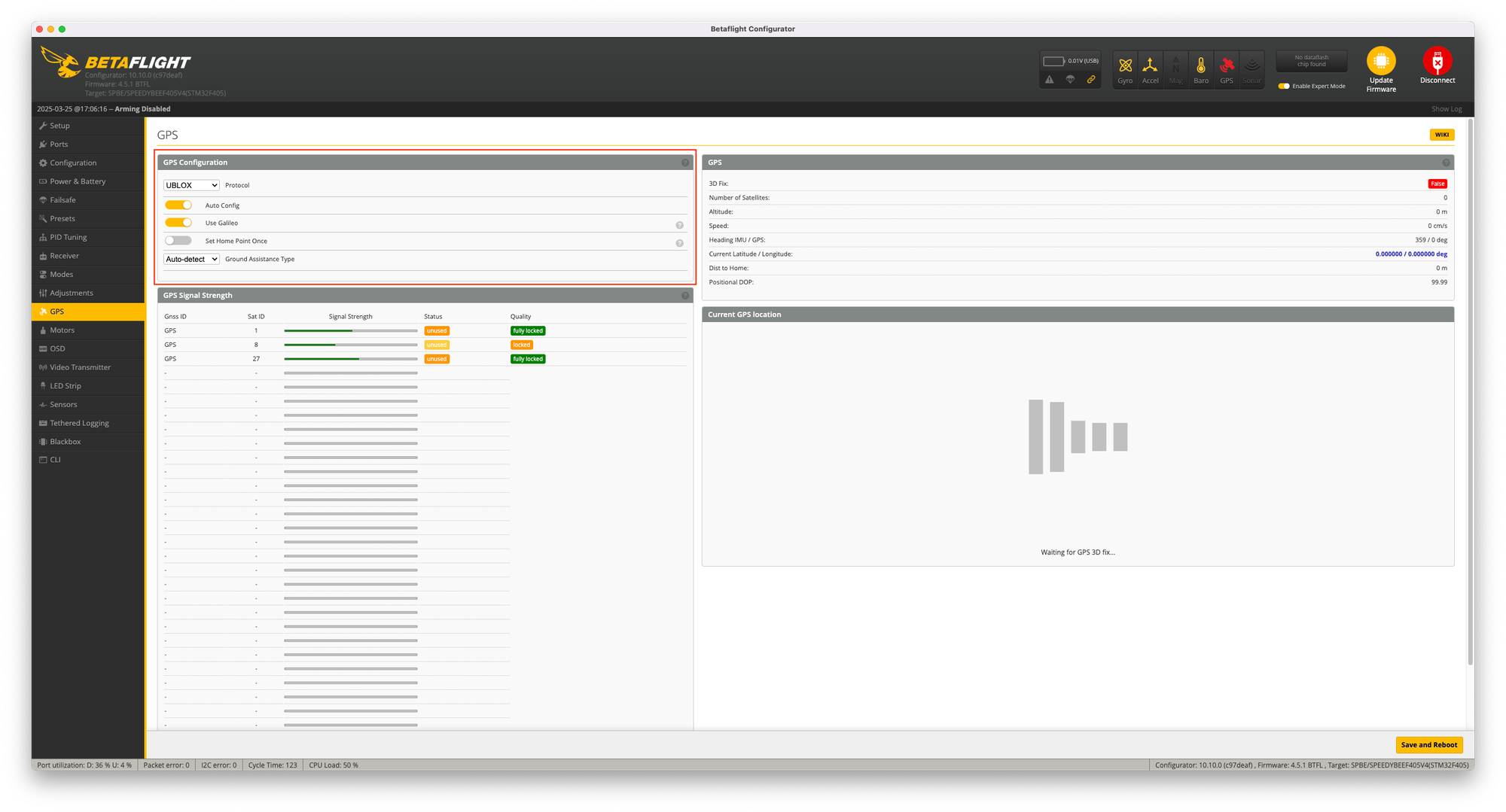
Betaflight GPS-Einstellungen
Für meine Freestyle- und Rennbauten mit GPS-Rettungsfunktion verwende ich standardmäßig die folgende Konfiguration:
Fortgeschrittene GNSS-Themen
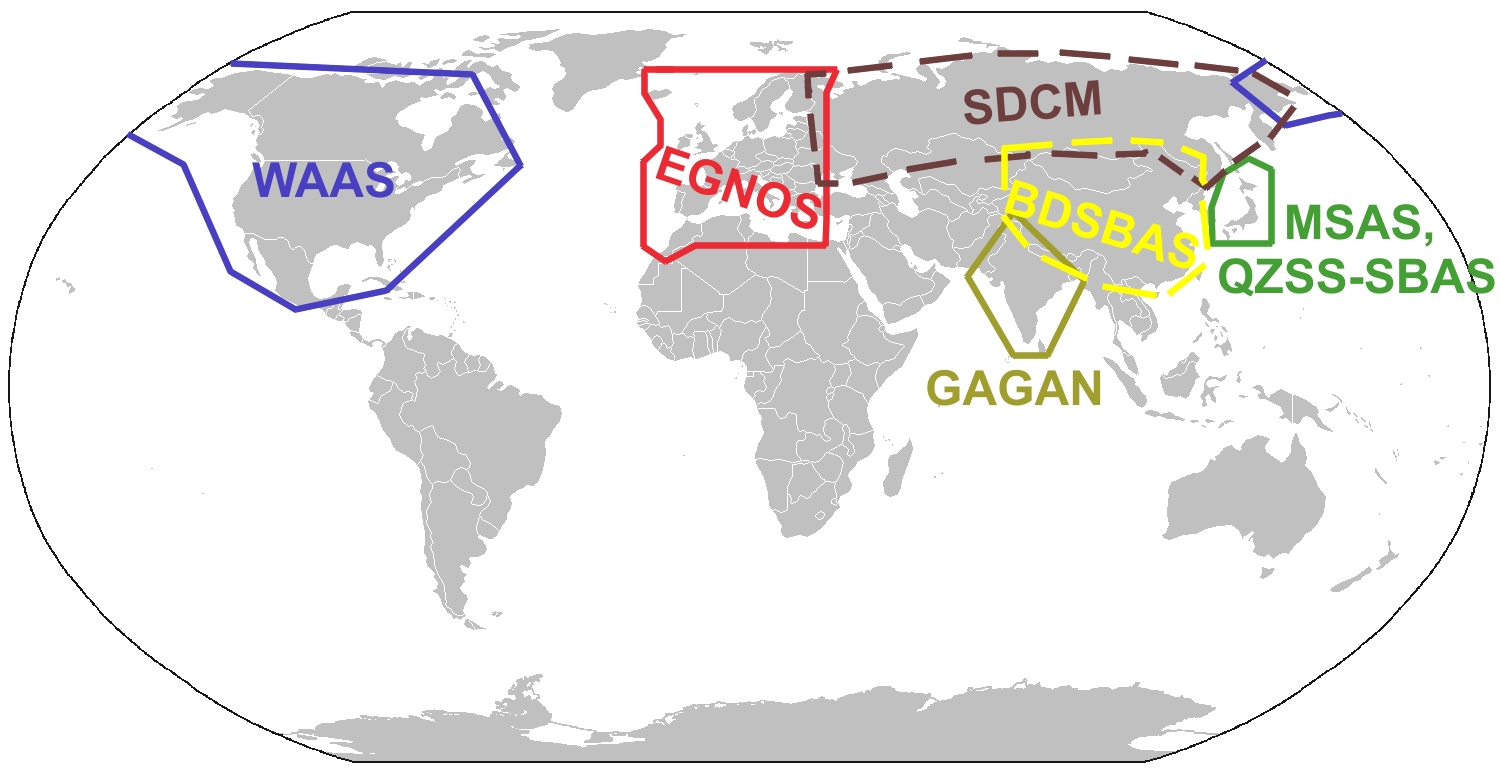
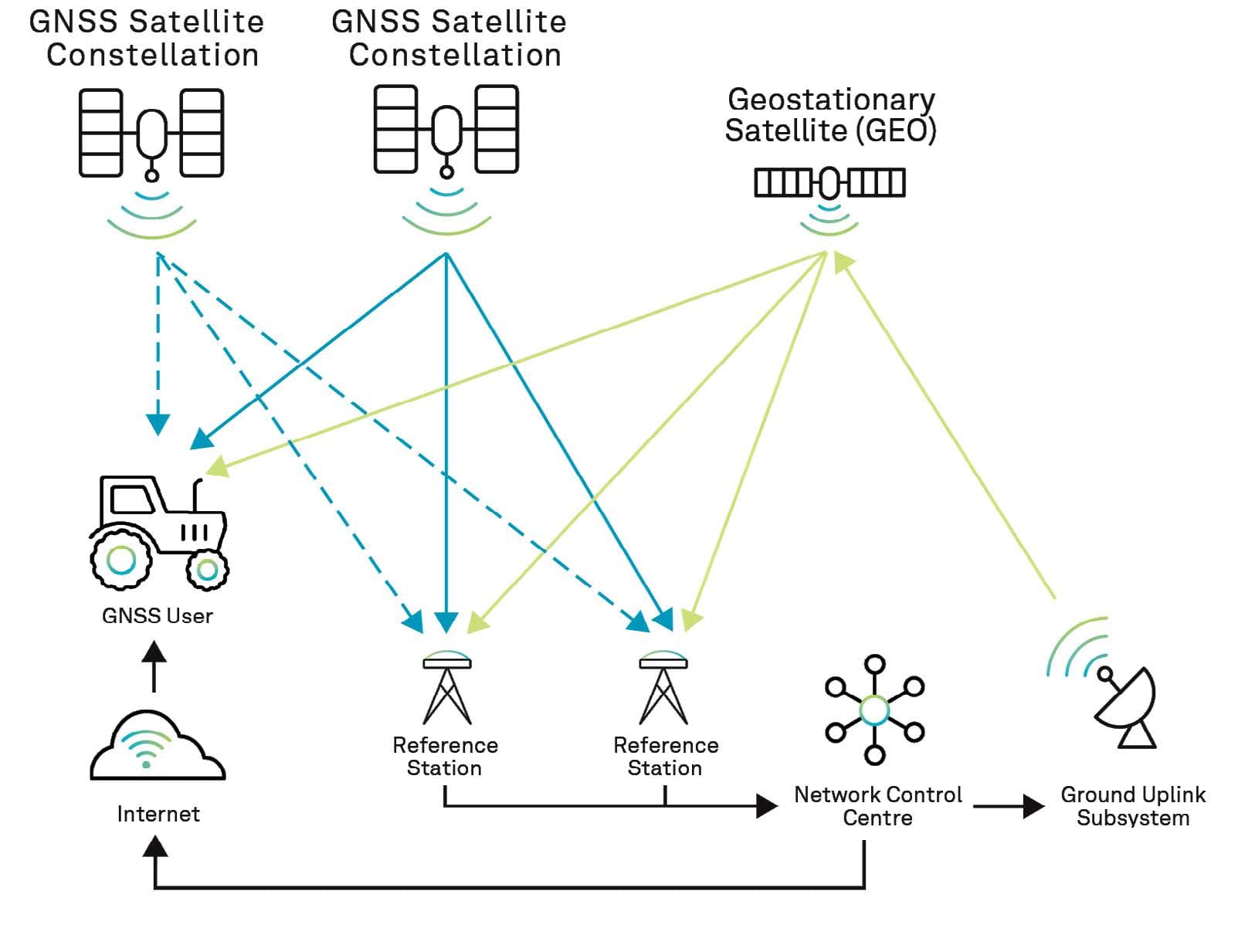
SBAS (Satellite-Based Augmentation System)
Regionale Systeme, die die GNSS-Genauigkeit verbessern, haben sich in meiner Erfahrung als sehr vorteilhaft erwiesen:
• WAAS (Wide Area Augmentation System): Nordamerika
• EGNOS (European Geostationary Navigation Overlay Service): Europa
• MSAS (Multi-functional Satellite Augmentation System): Japan
• GAGAN (GPS Aided GEO Augmented Navigation): Indien
• SDCM (System for Differential Corrections and Monitoring): Russland
Diese Systeme liefern Korrekturdaten, die die Genauigkeit von 3-5m auf 1-2m verbessern können. Am deutlichsten habe ich die Vorteile beim Fliegen in Europa mit EGNOS und in Nordamerika mit WAAS bemerkt. Die Korrekturen sind besonders wertvoll für die Höhengenauigkeit, die typischerweise die schwächste Dimension bei der GNSS-Positionierung ist.
Neben Genauigkeitsverbesserungen bieten SBAS-Systeme auch Integritätsüberwachung, die dabei hilft, unzuverlässige Satellitensignale zu identifizieren. Dies ist wertvoll für sicherheitskritische Anwendungen, bei denen es genauso wichtig ist zu wissen, wann man den Positionsdaten nicht trauen kann, wie genaue Daten zu haben.
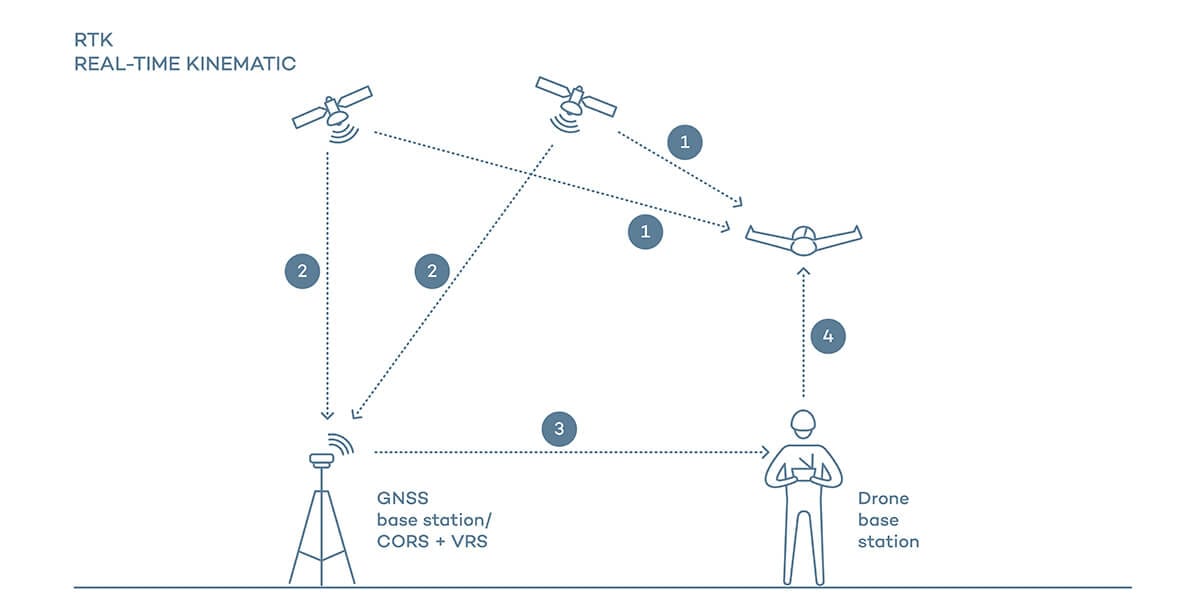
RTK (Real-Time Kinematics)
Für meine Mapping- und Vermessungsdrohnen war RTK transformativ:
Grundprinzip: Trägerphasenmessungen für Zentimetergenauigkeit
Komponenten:
- Basisstation: Ortsfeste Referenz
- Rover: Mobiler Empfänger auf der Drohne
- Korrektur-Link: Funk- oder Netzwerkverbindung
Genauigkeit: Typischerweise 1-3cm unter idealen Bedingungen
Das Einrichten von RTK erfordert mehr Komponenten und Komplexität, aber die Ergebnisse sind es für Präzisionsanwendungen wert. Ich verwende eine 4G/LTE-Verbindung, um NTRIP-Korrekturen von öffentlichen Diensten zu empfangen, was die Notwendigkeit einer lokalen Basisstation eliminiert.
Die wichtigsten Einschränkungen, die ich bei RTK festgestellt habe, sind:
- Erfordert freie Sicht zum Himmel
- Basisstation innerhalb von ~10km (obwohl Netzwerk-RTK dies erweitert)
- Zuverlässige Korrekturdatenverbindung
- Initialisierungsphase erforderlich
Für die meisten Freizeitflüge ist RTK übertrieben. Aber für Kartierung, Vermessung, Präzisionslandwirtschaft und automatische Landung ist es unschätzbar wertvoll. Die Fähigkeit, wiederholt mit Zentimetergenauigkeit an exakt dieselbe Position zurückzukehren, eröffnet viele professionelle Anwendungen.
PPP (Precise Point Positioning)
Für einige meiner entlegenen Erkundungsflüge, bei denen RTK nicht praktikabel ist:
• Grundprinzip: Verwendet präzise Satellitenbahn- und Uhrendaten
• Vorteil: Keine Basisstation erforderlich
• Nachteil: Längere Konvergenzzeit (Minuten bis Stunden)
• Genauigkeit: Dezimeter-Niveau (10-30cm)
PPP ist in Drohnenanwendungen aufgrund der Konvergenzzeitanforderungen weniger verbreitet, aber es ist eine wertvolle Technik für bestimmte spezialisierte Anwendungen. Ich habe es für Langzeit-Kartierungsmissionen verwendet, bei denen die Drohne Zeit hat, die Konvergenz zu erreichen, bevor sie das Kartierungsmuster beginnt.
Multi-Band-Empfang
Die neuesten High-End-Module wie das ZED-F9P verwenden mehrere Frequenzbänder:
• Einzelfrequenz: Die meisten Drohnen-GNSS (L1/E1/B1)
• Dualfrequenz: High-End-Module (L1+L5/E5/B2)
• Vorteile:
- Bessere Multipath-Unterdrückung
- Schnellere RTK-Initialisierung
- Verbesserte Genauigkeit
- Bessere Leistung in anspruchsvollen Umgebungen
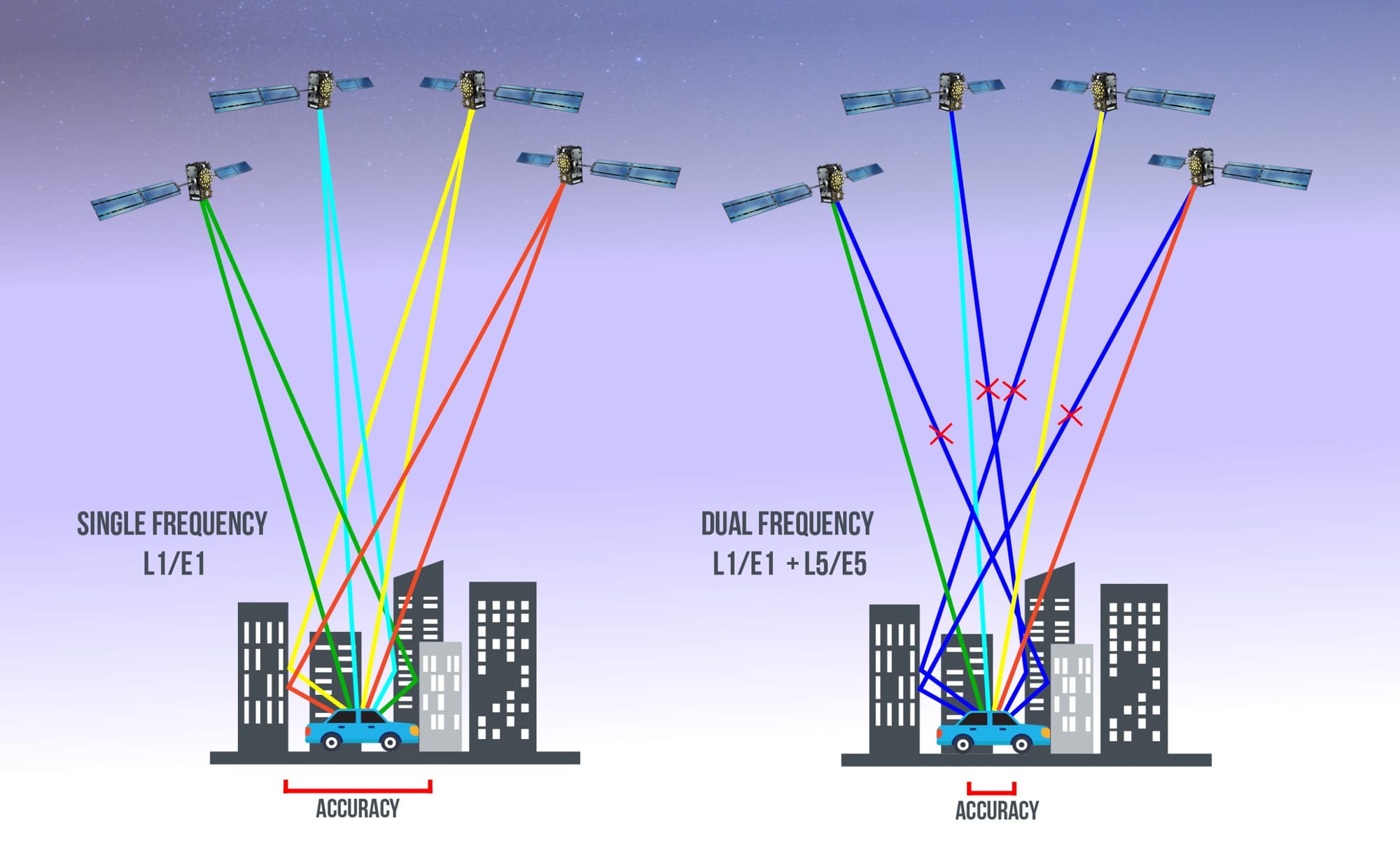
Der Unterschied ist spürbar – meine F9P-ausgestattete Vermessungsdrohne erreicht viel schneller eine RTK-Fixierung als ältere Einzelfrequenz-RTK-Systeme, die ich verwendet habe. Die Multipath-Unterdrückung ist besonders wertvoll in Umgebungen mit reflektierenden Oberflächen wie Wasser oder Gebäuden.
Fehlerbehebung bei GNSS-Problemen
Im Laufe der Jahre bin ich auf unzählige GNSS-Probleme gestoßen und habe sie gelöst. Hier sind die häufigsten Probleme und ihre Lösungen:
Schlechter Satellitenempfang
Symptome:
- Wenige Satelliten erfasst
- Hohe HDOP-Werte
- Inkonsistente Positionsdaten
- Häufiger GNSS-Verlust
Lösungen:
- Verbessern Sie die Antennenplatzierung – Ich habe dramatische Verbesserungen gesehen, indem ich die Antenne nur wenige Zentimeter von Störquellen entfernt habe.
- Entfernen Sie sich von Störquellen – insbesondere Videosender und Stromleitungen.
- Verwenden Sie ein Multi-Constellation-Modul – mehr Satelliten bedeuten mehr Chancen für guten Empfang.
- Überprüfen Sie auf physische Hindernisse – Kohlefaser ist besonders problematisch.
- Überprüfen Sie die Antennenverbindung – lose Verbindungen können zu sporadischen Problemen führen.
Ich habe einmal stundenlang einen schlechten Empfang an einem Neubau gesucht und festgestellt, dass die Kohlefaser-Deckplatte die Signale blockierte. Das Hinzufügen eines 15-mm-Abstandshalters zur Anhebung des Moduls löste das Problem sofort.
Langsame Satellitenerfassung
Symptome:
- Lange Zeit bis zur ersten Fixierung
- Verzögerter GPS-Lock vor dem Flug
Lösungen:
- Aktualisieren Sie auf ein neueres Modul – jede Generation hat verbesserte Erfassungszeiten.
- Aktivieren Sie alle verfügbaren Konstellationen – mehr Satelliten bedeuten eine schnellere Erfassung.
- Stellen Sie das geeignete dynamische Modell ein – die Verwendung von "Fußgänger" für eine Drohne kann die Erfassung verlangsamen.
- Stellen Sie sicher, dass die Batteriespannung stabil ist – Spannungseinbrüche können den Erfassungsprozess zurücksetzen.
- Erwägen Sie eine externe Antenne für anspruchsvolle Umgebungen – manchmal reicht die eingebaute Antenne einfach nicht aus.
Ich habe festgestellt, dass das Einschalten des Empfängers zwischen den Flügen (mit einer kleinen Batterie) die Erfassungszeit drastisch reduzieren kann, indem die Ephemeridendaten beibehalten werden.
Positionsdrift
Symptome:
- Positionshalten bewegt sich allmählich
- RTH landet weg vom Startpunkt
- Wegpunkte werden nicht genau verfolgt
Lösungen:
- Warten Sie auf eine bessere Satellitenabdeckung (niedrigerer HDOP) – Ich warte immer auf einen HDOP-Wert < 2,0, bevor ich den Positionsdaten vertraue.
- Erhöhen Sie die Mindestanforderung an Satelliten – mehr Satelliten bedeuten im Allgemeinen eine bessere Genauigkeit.
- Aktivieren Sie SBAS, falls verfügbar – die Korrekturen können die Drift erheblich reduzieren.
- Prüfen Sie auf magnetische Störungen, die den Kompass beeinflussen – Kompassprobleme tarnen sich oft als GNSS-Probleme.
- Berücksichtigen Sie Umweltfaktoren (Bäume, Gebäude) – Mehrwegreflexionen können Positionsfehler verursachen.
Bei einer Kartierungsmission bemerkte ich, dass die Drohne allmählich vom Kurs abkam. Das Problem stellte sich als ein schlecht kalibrierter Kompass heraus, der von den Motoren beeinflusst wurde. Eine erneute Kalibrierung des Kompasses abseits von Metallgegenständen löste das Problem.
GNSS-Aussetzer
Symptome:
- Plötzliche Positionssprünge
- Unregelmäßiges Navigationsverhalten
- Vorübergehender Positionsverlust
Lösungen:
- Passen Sie die GNSS-Filterparameter an – die meisten Firmware-Versionen verfügen über Einstellungen zur Glättung von GNSS-Daten.
- Erhöhen Sie die Navigationsglättung – dadurch können momentane Aussetzer herausgefiltert werden.
- Prüfen Sie auf intermittierende elektrische Störungen – Schaltnetzteile sind häufige Übeltäter.
- Aktualisieren Sie auf die neueste Firmware – viele GNSS-Probleme werden in Firmware-Updates behoben.
- Erwägen Sie ein Hardware-Upgrade auf eine neuere Generation – neuere Empfänger haben eine bessere Unterdrückung von Störsignalen.
Ich habe festgestellt, dass das Hinzufügen eines Kondensators am Stromeingang des GNSS-Moduls dazu beitragen kann, Aussetzer zu reduzieren, die durch elektrische Störungen des Stromversorgungssystems verursacht werden.
Diagnosewerkzeuge
U-Center (Ublox-Konfigurationssoftware)
Dies ist mein bevorzugtes Werkzeug zur Diagnose von GNSS-Problemen:
• Zweck: Konfiguration und Überwachung von Ublox-GNSS-Empfängern
• Funktionen:
- Satellitenverfolgung in Echtzeit
- Überwachung der Signalqualität
- Anpassung der Konfigurationsparameter
- Firmware-Updates
- Leistungsanalyse
Ich verbinde mich über USB oder UART-Durchleitung vom Flugcontroller. Die Ansicht der Satellitensignalstärke ist besonders nützlich, um Interferenzprobleme zu erkennen – Sie sehen alle Satelliten mit verringerter Signalstärke und nicht nur bestimmte.
https://www.u-blox.com/en/product/u-center-de/
GNSS-Viewer
Integriert in die meisten Flugsteuerungssoftwares:
• Zweck: Visualisierung der GNSS-Leistung
• Beispiele:
- Mission Planner GPS-Status
- INAV GPS-Einrichtungsbildschirm
- Betaflight GPS-Tab
Ich überprüfe diese immer vor Flügen, um einen guten Empfang zu verifizieren. Die wichtigsten Metriken, die ich überwache, sind:
- Satellitenanzahl (mehr ist besser, ich möchte für kritische Missionen 14+ sehen)
- HDOP-Wert (niedriger ist besser, ich strebe < 1,5 an)
- Fix-Typ (3D ist für die Navigation erforderlich, RTK float/fixed für Präzisionsanwendungen)
- Signalstärke (zeigt Empfangsqualität und mögliche Störungen an)
Blackbox-Analyse
Zur Diagnose nach dem Flug:
• Zweck: Überprüfung der GNSS-Leistung während des Fluges
• Werkzeuge:
- Blackbox Explorer
- Flight Review (ArduPilot)
Ich habe durch Blackbox-Analysen viele subtile Probleme identifiziert, die während des Fluges nicht ersichtlich waren. Zu untersuchende Schlüsseldaten sind:
- Positionsgenauigkeit über die Zeit
- Home-Point-Drift
- Navigationsleistung
- GNSS-Signalqualität
Der Vergleich von GNSS-Daten mit anderen Sensoren (wie Beschleunigungsmessern) kann Integrationsprobleme aufdecken, die die Navigationsleistung beeinträchtigen.
Zukünftige Trends in der GNSS-Technologie
Basierend auf meinen Erfahrungen mit den neuesten Modulen und Branchenentwicklungen, sehe ich die GNSS-Technologie in folgende Richtungen gehen:
Hardware-Fortschritte
• Multi-Band-Standard: Dual-Frequenz wird in Verbrauchergeräten immer häufiger. Ich erwarte, dass dies innerhalb von 2-3 Jahren Hobby-Drohnen erreichen wird, was eine bessere Genauigkeit und Zuverlässigkeit mit sich bringt.
• Miniaturisierung: Kleinere, leichtere Module mit besserer Leistung. Der Trend zur Integration wird sich fortsetzen, mit GNSS, Kompass, Barometer und sogar IMU in einem Paket.
• Integration: Kombiniertes GNSS, Kompass, Barometer und Funk. Ich sehe das bereits in einigen High-End-Modulen, und es vereinfacht die Verkabelung und reduziert das Gewicht.
• Energieeffizienz: Verlängerte Akkulaufzeit für Langstreckenmissionen. Der Super-E-Modus des M10 ist nur der Anfang – zukünftige Module werden den Stromverbrauch wahrscheinlich noch weiter senken.
• Antennentechnologie: Verbesserter Empfang in kleineren Gehäusen. Das Antennendesign entwickelt sich ständig weiter, mit besserer Leistung bei kleineren Formfaktoren.
Software-Innovationen
• Verbesserte Algorithmen: Bessere Positionsschätzung und Filterung. Maschinelle Lernansätze tauchen in kommerziellen Systemen auf und werden schließlich auch Hobby-Drohnen erreichen.
• KI-gestützte Positionierung: Maschinelles Lernen für herausfordernde Umgebungen. Ich habe frühe Forschungen gesehen, die neuronale Netze verwenden, um die Positionierung in städtischen Schluchten zu verbessern.
• Sensorfusion: Engere Integration mit anderen Navigationssensoren. Die Grenzen zwischen GNSS, visueller Positionierung und Trägheitsnavigation werden weiter verschwimmen.
• Integritätsüberwachung: Bessere Erkennung unzuverlässiger Signale. Je autonomer Drohnen werden, desto wichtiger wird es zu wissen, wann man GNSS-Daten nicht trauen kann.
• Vereinfachtes Setup: Intuitivere Konfiguration. Die Komplexität des GNSS-Setups war für viele Nutzer eine Hürde, aber neuere Systeme werden immer mehr Plug-and-Play.
Aufkommende Technologien
• LEO-Satellitennavigation: Low Earth Orbit-Konstellationen für verbesserte Genauigkeit. Systeme wie Starlink könnten potenziell Navigationsdienste mit besserer städtischer Leistung als herkömmliches GNSS anbieten.
• Visuell unterstützte Navigation: Kameras verbessern GNSS in herausfordernden Umgebungen. Ich verwende dies bereits bei einigen Builds, bei denen optische Flusssensoren GNSS für eine robustere Positionierung ergänzen.
• Quantensensoren: Positionierungstechnologie der nächsten Generation. Noch in Forschungslabors, aber Quantensensoren versprechen dramatische Verbesserungen der Genauigkeit ohne externe Referenzen.
• Erweiterte Authentifizierung: Schutz vor Spoofing-Angriffen. Da GNSS-Spoofing immer häufiger vorkommt, werden Authentifizierungsfunktionen für kritische Anwendungen wichtiger.
• Mesh-Positionierung: Drohnen teilen Positionsdaten in Schwärmen. Ich habe damit in Multi-Drohnen-Setups experimentiert, wo Drohnen relative Positionierung nutzen können, um ihre absoluten Positionsschätzungen zu verbessern.
FAQ: Häufige Fragen zur Drohnen-GNSS-Technologie
Was ist der Unterschied zwischen GPS, GNSS und GLONASS?
Dies ist eine der häufigsten Fragen, die ich bekomme, wenn ich Leuten mit ihren Builds helfe:
• GPS (Global Positioning System): Das amerikanische Satellitennavigationssystem, das von der US Space Force betrieben wird. Es ist das ursprüngliche und am weitesten verbreitete System.
• GNSS (Global Navigation Satellite System): Der Oberbegriff für alle Satellitennavigationssysteme, einschließlich GPS, GLONASS, Galileo, BeiDou und regionale Systeme. Moderne Empfänger nutzen typischerweise mehrere GNSS-Konstellationen gleichzeitig.
• GLONASS: Russlands Satellitennavigationssystem, ähnlich wie GPS, aber mit anderen Orbitaleigenschaften und Signalstruktur. Es ist das zweitälteste globale System und bietet eine gute Abdeckung in hohen Breitengraden.
Wenn jemand von einem "GPS-Modul" für eine Drohne spricht, meint er normalerweise einen GNSS-Empfänger, der mehrere Satellitenkonstellationen nutzen kann, nicht nur das amerikanische GPS-System. Ich stelle das immer klar, wenn ich Neulingen helfe, um Verwirrung zu vermeiden.
Lohnt sich ein Upgrade auf ein GNSS-Modul der neueren Generation?
Basierend auf meinen Erfahrungen mit dem Upgrade zahlreicher Drohnen:
• M6/M7 auf M8: Signifikante Verbesserung der Erfassungszeit, Konstellationsunterstützung und Genauigkeit. Ein Upgrade lohnt sich auf jeden Fall.
• M8 auf M9: Spürbare Verbesserungen bei Genauigkeit, Aktualisierungsrate und Multi-Konstellations-Performance. Ein Upgrade lohnt sich für anspruchsvolle Navigationsanwendungen.
• M9 auf M10: Schrittweise Verbesserungen bei Empfindlichkeit, Stromverbrauch und Leistung in städtischen Gebieten. Ein Upgrade ist für spezielle Anwendungen oder bei kritischem Strombedarf in Betracht zu ziehen.
Für die meisten Hobby-Piloten ist ein M8N-Modul für die Grundnavigation immer noch ausreichend, während ein M9N eine hervorragende Leistung für anspruchsvollere Anwendungen bietet. Die M10-Serie oder F9P sind in erster Linie für professionelle oder spezielle Anwendungen von Vorteil.
Ich habe meine Langstrecken-Erkundungsdrohne von M8N auf M9N aufgerüstet und sofortige Verbesserungen bei der Erfassungszeit und Positionsstabilität festgestellt. Für meine Freestyle-Quads, die GPS nur für die Rückkehr zum Startpunkt verwenden, habe ich die M8N-Module beibehalten, da sie für diesen Zweck völlig ausreichen.
Wie viele Satelliten brauche ich für eine zuverlässige Navigation?
Aus meiner Erfahrung mit Dutzenden von GNSS-ausgestatteten Drohnen:
• Funktionsminimum: 5-6 Satelliten
• Empfohlenes Minimum: 8 Satelliten
• Gute Leistung: 10-14 Satelliten
• Hervorragende Leistung: 15+ Satelliten
Die Anzahl der Satelliten ist jedoch nur ein Teil der Gleichung. HDOP (Horizontal Dilution of Precision) ist ebenso wichtig - ein niedrigerer HDOP-Wert (idealerweise unter 2,0) deutet auf eine bessere Satellitengeometrie und eine genauere Positionierung hin.
Ich hatte Situationen mit 20+ Satelliten, aber schlechtem HDOP, weil alle Satelliten in einem Teil des Himmels zusammengedrängt waren, was zu einer mittelmäßigen Positionierung führte. Umgekehrt hatte ich eine hervorragende Leistung mit nur 9 Satelliten, die gut über den Himmel verteilt waren und einen niedrigen HDOP ergaben.
Moderne Multi-Konstellations-Empfänger können unter offenen Himmelsbedingungen oft 20+ Satelliten sehen, was eine hervorragende Redundanz und Genauigkeit bietet.
Entleert die Verwendung mehrerer Konstellationen den Akku schneller?
Eine Frage, die ich oft von Piloten bekomme, die sich Gedanken über die Flugzeit machen:
Die Verwendung mehrerer GNSS-Konstellationen erhöht den Stromverbrauch geringfügig, aber die Auswirkungen sind relativ gering:
• Nur GPS: Basis-Stromverbrauch
• GPS+GLONASS: ~10-15% mehr Strom als nur GPS
• GPS+GLONASS+Galileo+BeiDou: ~20-30% mehr Strom als nur GPS
Zum Vergleich: Ein typisches M8N-Modul verbraucht etwa 25mA, während eine vollständige Multi-Konstellations-Konfiguration etwa 30-35mA verbrauchen könnte. Bei einer Drohne mit einer Stromaufnahme von 5-20A während des Fluges ist dieser Unterschied vernachlässigbar (weniger als 0,5% des Gesamtstromverbrauchs).
Ich habe den Unterschied bei meinen Langstrecken-Aufbauten gemessen, und die Auswirkungen auf die Flugzeit sind nicht wahrnehmbar. Die Vorteile einer verbesserten Genauigkeit, einer schnelleren Erfassung und einer besseren Zuverlässigkeit überwiegen fast immer die minimalen Auswirkungen auf den Stromverbrauch.
Welche GNSS-Konstellation ist die genaueste?
Basierend auf meinen Tests in verschiedenen Regionen:
• GPS: Im Allgemeinen 3-5m Genauigkeit, sehr konsistent und zuverlässig
• GLONASS: Typischerweise 4-7m Genauigkeit, besser in hohen Breitengraden
• Galileo: 1-3m Genauigkeit, entwickelt für zivile Präzision
• BeiDou: 3-5m weltweit, 2-3m im asiatisch-pazifischen Raum
Die beste Leistung wird jedoch durch die gemeinsame Nutzung mehrerer Konstellationen erzielt, da sie sich in ihren Stärken und Schwächen ergänzen. Ein moderner Empfänger, der alle verfügbaren Konstellationen nutzt, erreicht unter guten Bedingungen typischerweise eine Genauigkeit von 1-3m, besser als jede einzelne Konstellation allein.
Meiner Erfahrung nach bietet Galileo derzeit die beste zivile Genauigkeit der globalen Systeme, aber sein Vorteil ist am auffälligsten, wenn es mit anderen Konstellationen kombiniert wird.
Kann ich RTK auf einer normalen Drohne verwenden?
Ja, RTK kann auf normalen Drohnen mit einigen Überlegungen implementiert werden:
Anforderungen:
- RTK-fähiges GNSS-Modul (wie ZED-F9P)
- Flugsteuerung mit RTK-Unterstützung (ArduPilot, INAV mit Einschränkungen)
- Basisstation oder NTRIP-Dienst für Korrekturen
- Datenverbindung für die Korrekturübertragung (Telemetrie-Funk, 4G/LTE)
Praktische Überlegungen:
- Zusätzliche Kosten (150-300 $ für RTK-Hardware)
- Erhöhte Komplexität bei der Einrichtung
- Notwendigkeit einer Korrektur-Datenquelle
- Begrenzter Nutzen für Standard-FPV-Fliegen
Ich habe RTK bei mehreren Aufbauten implementiert, und während die Genauigkeit im Zentimeterbereich beeindruckend ist, ist sie für Freizeit-, Renn- oder Freestyle-Fliegen im Allgemeinen unnötig. Sinnvoll ist RTK für Kartierungs-, Vermessungs-, Präzisionslandwirtschafts- und automatisierte Landeanwendungen.
Für meine Vermessungsdrohne verwende ich ein ZED-F9P-Modul mit einer 4G-Verbindung, um NTRIP-Korrekturen von einem öffentlichen Dienst zu empfangen. Die Einrichtung war komplexer als eine Standard-GNSS-Implementierung, aber die Ergebnisse sind es für professionelle Anwendungen wert.
Wie beeinflussen Umweltfaktoren die GNSS-Leistung?
Verschiedene Umweltfaktoren können den GNSS-Empfang erheblich beeinträchtigen:
• Urbane Schluchten: Gebäude blockieren und reflektieren Signale, was die Genauigkeit um das 5- bis 10-fache reduziert. In dichten städtischen Umgebungen mit Einzel-Konstellations-Empfängern habe ich Positionsfehler von über 20 Metern festgestellt.
• Dichtes Laub: Bäume können Signale um 10-30dB dämpfen, was die Satellitensichtbarkeit reduziert. Ich habe festgestellt, dass das Fliegen über den Baumkronen oft für eine zuverlässige Navigation in bewaldeten Gebieten notwendig ist.
• Wasserflächen: Reflexionen können Mehrwegfehler verursachen. Bei der Kartierung von Küstenlinien habe ich Positionssprünge in der Nähe der Wasserkante aufgrund von Signalreflexionen bemerkt.
• Wetter: Starker Regen kann die Signale leicht beeinträchtigen (1-2dB Dämpfung). Meiner Erfahrung nach verursacht dies selten spürbare Leistungsprobleme.
• Ionosphärische Bedingungen: Sonnenaktivität kann die Genauigkeit beeinflussen. Während Sonnenstürmen habe ich eine leicht verschlechterte Leistung beobachtet, obwohl moderne Empfänger damit gut umgehen.
• Störquellen: Nahe gelegene HF-Störungen können den Empfang blockieren. Einmal weigerte sich eine Drohne, eine Positionsbestimmung durchzuführen, bis ich merkte, dass mein drahtloses Mikrofonsystem Störungen verursachte.
Multi-Konstellations-Empfänger helfen, diese Probleme zu entschärfen, indem sie mehr Satelliten und Frequenzen zur Verfügung stellen, mit denen gearbeitet werden kann, aber kein GNSS-System ist vollständig immun gegen Umweltprobleme. Für kritische Anwendungen in anspruchsvollen Umgebungen ziehe ich immer ergänzende Navigationstechnologien wie optischen Fluss oder visuelle Positionierung in Betracht.
Fazit
Die GNSS-Technologie hat sich von ihren militärischen Ursprüngen zu einem wesentlichen Bestandteil moderner Drohnensysteme entwickelt. Der Übergang von GPS-Empfängern mit nur einem Satellitensystem zu GNSS-Empfängern mit mehreren Konstellationen hat die Navigationsleistung, Zuverlässigkeit und Fähigkeiten erheblich verbessert.
Das Verständnis der Unterschiede zwischen GPS, GLONASS, Galileo und BeiDou sowie der Entwicklung der Empfängertechnologie von frühen Modulen bis zu den neuesten Generationen M10 und F9P ermöglicht es Drohnenpiloten, fundierte Entscheidungen über ihre Navigationssysteme zu treffen. Egal, ob Sie zum Vergnügen, für Rennen, Freestyle oder professionelle Anwendungen fliegen, die Auswahl der geeigneten GNSS-Technologie und deren korrekte Implementierung kann die Fähigkeiten und Sicherheit Ihrer Drohne verbessern.
Da die GNSS-Technologie mit Mehrband-Empfang, verbesserten Algorithmen und Integration mit anderen Sensoren weiter voranschreitet, können wir in anspruchsvollen Umgebungen eine noch bessere Leistung und eine präzisere Positionierung für spezielle Anwendungen erwarten. Indem Sie über diese Entwicklungen informiert bleiben und verstehen, wie Sie Ihr aktuelles Setup optimieren können, stellen Sie sicher, dass Ihr Drohnen-Navigationssystem die bestmögliche Leistung erbringt.


