تقنية GNSS: دليل شامل للملاحة الآمنة
في حين أن مصطلح "GPS" غالبًا ما يستخدم كمصطلح عام للملاحة بالأقمار الصناعية في الطائرات بدون طيار، فإن أنظمة الملاحة الحديثة تستفيد في الواقع من مجموعات متعددة من الأقمار الصناعية والمعروفة مجتمعة باسم GNSS (أنظمة الملاحة العالمية بالأقمار الصناعية). بعد سنوات من بناء وتطيير الطائرات بدون طيار المزودة بأنظمة ملاحة مختلفة، رأيت بشكل مباشر كيف يمكن للتنفيذ الصحيح لنظام GNSS أن يُحدث فرقًا بين طائرة تعود إلى المنزل بشكل موثوق وأخرى تصبح زينة مكلفة للأشجار. يستكشف هذا الدليل الشامل أنظمة الملاحة المختلفة بالأقمار الصناعية، وخصائصها، وتطور وحدات استقبال GNSS، وكيف تعزز هذه التقنيات قدرات الملاحة للطائرات بدون طيار.
مقدمة في تقنية GNSS
يشير GNSS (نظام الملاحة العالمي بالأقمار الصناعية) إلى كوكبة الأقمار الصناعية التي توفر إشارات من الفضاء تنقل بيانات الموقع والتوقيت إلى أجهزة استقبال GNSS. تستخدم أجهزة الاستقبال هذه البيانات لتحديد الموقع. في حين أن نظام GPS هو نظام GNSS الأكثر شهرة، توجد العديد من الأنظمة الأخرى وغالبًا ما تستخدم أجهزة الاستقبال الحديثة أنظمة متعددة في وقت واحد لتحسين الأداء.

ما زلت أتذكر أول طائرة بدون طيار مجهزة بنظام GPS في عام 2020. كانت تستخدم وحدة Ublox LEA-6H بدائية استغرقت ما يقرب من دقيقتين للحصول على تثبيت الموقع وكانت تنجرف عدة أمتار أثناء التحليق. سريعًا إلى اليوم، وأنا أطير بأجهزة استقبال متعددة الكوكبات تقفل في ثوانٍ وتحافظ على الموضع بدقة مذهلة. كان التطور ثوريًا بكل المقاييس لقدرات الطائرات بدون طيار.
تطور الملاحة عبر الأقمار الصناعية
تطورت الملاحة عبر الأقمار الصناعية بشكل كبير منذ نشأتها:
• الأصول العسكرية (1970-1980): تم تطوير نظام GPS من قبل وزارة الدفاع الأمريكية للتطبيقات العسكرية. كانت التكنولوجيا خاضعة للرقابة الصارمة ومحدودة في التطبيقات المدنية.
• الوصول المدني (1990): جعلت سياسة التوافر الانتقائي نظام GPS أقل دقة عمداً للاستخدام المدني. كانت وحدات GPS المبكرة تحتوي على أخطاء تزيد عن 100 متر!
• الوصول المدني الكامل (2000): مكّن إزالة التوافر الانتقائي من تطبيقات مدنية دقيقة. كان هذا نقطة تحول فتحت الباب أمام ملاحة موثوقة للطائرات بدون طيار.
• عصر الكوكبات المتعددة (2010): أدى تطوير ونشر أنظمة بديلة مثل GLONASS وGalileo وBeiDou إلى خلق تكرار وتحسين الأداء. لاحظت تحسنًا كبيرًا في موثوقية ملاحة طائراتي بدون طيار عندما قمت بالترقية من وحدات GPS فقط إلى وحدات GPS+GLONASS حوالي عام 2022.
• التكامل الحديث (الحاضر): أصبحت أجهزة استقبال الكوكبات المتعددة قياسية في الأجهزة الاستهلاكية. اليوم، يمكن حتى للطائرات بدون طيار ذات الميزانية المحدودة الوصول إلى أكثر من 30 قمرًا صناعيًا في وقت واحد لتحديد المواقع بمستوى السنتيمتر.
المبادئ الأساسية للملاحة عبر الأقمار الصناعية
تعمل جميع أنظمة GNSS وفقًا لمبادئ متشابهة، وقد ساعدني فهم هذه الأساسيات في حل عدد لا يحصى من مشكلات الملاحة على مر السنين:
- كوكبة الأقمار الصناعية: شبكة من الأقمار الصناعية التي تدور حول الأرض تبث إشارات دقيقة للوقت والموضع. كلما زاد عدد الأقمار الصناعية التي يمكن لجهاز الاستقبال "رؤيتها"، زادت دقة موقعك.
- إرسال الإشارة: تبث هذه الأقمار الصناعية معلومات دقيقة عن الوقت والموقع على ترددات راديو محددة. الإشارات ضعيفة للغاية بحلول الوقت الذي تصل فيه إلى الأرض - حوالي نفس قوة مصباح بقوة 50 واط يتم مشاهدته من مسافة 12,000 ميل!
- المثلثية: يحسب جهاز الاستقبال في طائرتك بدون طيار الموقع من خلال قياس تأخيرات الوقت من أقمار صناعية متعددة. أحب أن أشرح هذا بأن جهاز الاستقبال يسأل، "كم أنا بعيد عن القمر الصناعي أ؟ كم أنا بعيد عن القمر الصناعي ب؟" وهكذا، ثم تحديد الموقع الوحيد الممكن الذي يلبي جميع تلك المسافات.
- المتطلبات الدنيا: تحتاج إلى 4 أقمار صناعية على الأقل لتحديد الموقع ثلاثي الأبعاد (خط العرض، خط الطول، الارتفاع). تعلمت من خلال التجربة أنه في حين أن 4 أقمار صناعية ستعمل، فإنك تريد حقًا 8+ للملاحة الموثوقة للطائرات بدون طيار.
- تصحيح الخطأ: تحسن التقنيات المختلفة الدقة من خلال حساب التأخيرات الجوية وأخطاء الساعة وعوامل أخرى. أجهزة الاستقبال الحديثة جيدة بشكل ملحوظ في ذلك، وهذا هو السبب في أن الطائرات بدون طيار اليوم يمكنها الاحتفاظ بالموضع بدقة كبيرة.
مقاييس الأداء الرئيسية
هناك عدة عوامل تحدد أداء GNSS، وقد ساعدني فهم هذه العوامل في اختيار الوحدات المناسبة لتطبيقات مختلفة:
• الدقة: مدى قرب الموقع المقاس من الموقع الحقيقي. بالنسبة لملاحة الطائرات بدون طيار القياسية، عادة ما تكون دقة 2-3 متر كافية، ولكن للتعيين أو تطبيقات الدقة، قد تحتاج إلى دقة على مستوى السنتيمتر.
• التوافر: النسبة المئوية للوقت الذي تكون فيه الخدمة قابلة للاستخدام. لقد وجدت أن أجهزة استقبال الكوكبات المتعددة تحسن هذا المقياس بشكل كبير، خاصة في البيئات الصعبة مثل المناطق الحضرية أو تحت غطاء الأشجار الجزئي.
• الاستمرارية: القدرة على العمل دون انقطاع. هذا أمر بالغ الأهمية للمهام المستقلة - يمكن أن يكون انقطاع GNSS للحظة أثناء رحلة طويلة المدى كارثيًا.
• النزاهة: الثقة بأن النظام يوفر معلومات صحيحة. تحتوي أجهزة الاستقبال الحديثة على خوارزميات متطورة لاكتشاف القياسات الخاطئة ورفضها.
• الوقت حتى أول إصلاح (TTFF): مدى سرعة تحديد الموقع. أتذكر أيام الانتظار لعدة دقائق مع أجهزة استقبال أقل جودة للحصول على قفل GPS قبل الإقلاع - الآن يستغرق الأمر عادةً ثوانٍ مع الوحدات الحديثة.
• معدل التحديث: مدى تكرار تحديث الموقع. بالنسبة للسباق أو الطيران الديناميكي، توفر معدلات التحديث الأعلى (10 هرتز+) ملاحة أكثر سلاسة بشكل ملحوظ.
كوكبات GNSS الرئيسية
على مر السنين، استخدمت أجهزة استقبال تدعم مجموعات مختلفة من هذه الأنظمة، ولكل منها نقاط قوة وضعف. ساعدني فهم اختلافاتها في تحسين طائراتي بدون طيار لظروف طيران مختلفة.
GPS (نظام تحديد المواقع العالمي)
نظام الملاحة بالأقمار الصناعية الأصلي والأكثر استخدامًا على نطاق واسع:
• البلد/المنطقة: الولايات المتحدة
• التشغيل الأولي: 1978 (محدود)، القدرة التشغيلية الكاملة في 1995
• الأقمار الصناعية: 31 قمرًا صناعيًا عاملاً (24 مطلوبًا للتغطية العالمية)
• خصائص المدار:
- مدار أرضي متوسط على ارتفاع حوالي 20,200 كم
- 6 مستويات مدارية مع 4+ أقمار صناعية لكل منها
- فترة مدارية تبلغ 12 ساعة
• ترددات الإشارة:
- L1 (1575.42 ميجاهرتز) - التردد المدني الأساسي
- L2 (1227.60 ميجاهرتز) - يستخدم للتطبيقات العسكرية والمدنية المتقدمة
- L5 (1176.45 ميجاهرتز) - أحدث تردد لتطبيقات سلامة الحياة
• الدقة:
- خدمة تحديد المواقع القياسية (SPS): ~3-5 أمتار
- خدمة تحديد المواقع الدقيقة (PPS): ~<1 متر (عسكري)
كان GPS العمود الفقري لملاحة الطائرات بدون طيار لسنوات، وما زلت أعتبره النظام الأكثر موثوقية بشكل عام. لقد طرت في مناطق نائية حول العالم، ونادراً ما خذلتني تغطية GPS. تجعل نضج النظام وبرنامج التحديث المستمر منه خيارًا يمكن الاعتماد عليه لمعظم التطبيقات.
أحد قيود نظام تحديد المواقع العالمي (GPS) هو أن أداءه يمكن أن يتدهور في خطوط العرض العالية (بالقرب من القطبين) بسبب تكوين مدار الأقمار الصناعية. يمكن أن تتأثر الإشارات أيضًا بالمباني العالية في المدن والغطاء النباتي الكثيف، وهذا هو السبب في أن الوصول إلى أنظمة أقمار صناعية متعددة يعتبر قيمًا للغاية.
GLONASS (نظام الملاحة بالأقمار الصناعية العالمي)
البديل الروسي لنظام GPS أصبح مكملاً مهمًا في أجهزة الاستقبال الحديثة:
• البلد/المنطقة: روسيا
• التشغيل الأولي: 1982 (محدود)، استعادة القدرة التشغيلية الكاملة في 2011
• الأقمار الصناعية: 24 قمرًا صناعيًا عاملاً
• خصائص المدار:
- مدار أرضي متوسط على ارتفاع حوالي 19,100 كم
- 3 مستويات مدارية مع 8 أقمار صناعية في كل منها
- فترة مدارية 11 ساعة و15 دقيقة
• ترددات الإشارة:
- L1 (1598.0625 - 1605.375 ميجاهرتز)
- L2 (1242.9375 - 1248.625 ميجاهرتز)
- L3 (1202.025 ميجاهرتز)
• الدقة:
- الدقة القياسية: ~4-7 أمتار
- الدقة العالية: ~<1 متر (عسكري)
لقد أضفت قدرة GLONASS إلى طائراتي بدون طيار حوالي عام 2022، وكان التحسن ملحوظًا على الفور. يعمل النظام بشكل جيد بشكل خاص في خطوط العرض العالية - لقد طرت في شمال النرويج حيث كانت أقمار GLONASS الصناعية في كثير من الأحيان أكثر عددًا من أقمار GPS في مجال رؤية جهاز الاستقبال الخاص بي.
يكمل نظام GLONASS نظام GPS بشكل ممتاز في أجهزة الاستقبال المدمجة. في حين أنه تاريخيًا كان أقل استقرارًا من GPS (كانت هناك فترة في التسعينيات عندما كاد النظام ينهار)، فإن نظام GLONASS الحديث موثوق للغاية. لقد وجدت أن وجود كلا النظامين نشطين يوفر احتياطيًا ممتازًا - إذا كان أحد الأنظمة يواجه مشاكل، فإن الآخر يحافظ على ملاحة طائرتك بدون طيار بأمان.
جاليليو
نظام الملاحة بالأقمار الصناعية العالمي (GNSS) الذي يسيطر عليه المدنيون في الاتحاد الأوروبي هو أحدث لاعب رئيسي، وقد أعجبني أداؤه:
• البلد/المنطقة: الاتحاد الأوروبي
• التشغيل الأولي: 2016 (خدمات أولية)، من المتوقع أن تكون القدرة التشغيلية الكاملة بحلول عام 2026
• الأقمار الصناعية: 28 مخططة (24 عاملة + 4 احتياطية)، 26 حاليًا في المدار
• خصائص المدار:
- مدار أرضي متوسط على ارتفاع حوالي 23,222 كم
- 3 مستويات مدارية مع 8-10 أقمار صناعية في كل منها
- فترة مدارية 14 ساعة
• ترددات الإشارة:
- E1 (1575.42 ميجاهرتز) - نفس تردد GPS L1
- E5a (1176.45 ميجاهرتز) - نفس تردد GPS L5
- E5b (1207.14 ميجاهرتز)
- E6 (1278.75 ميجاهرتز)
• الدقة:
- الخدمة المفتوحة: ~1-3 أمتار
- خدمة الدقة العالية: ~20 سم
- الخدمة المنظمة العامة: مشفرة للاستخدام الحكومي
عندما قمت بتفعيل نظام جاليليو على طائراتي بدون طيار حوالي عام 2022، كنت متشككًا فيما إذا كان سيحدث فرقًا ملحوظًا. لدهشتي، كان لذلك تأثير - خاصة في البيئات الحضرية حيث يمكن للمباني أن تحجب بعض إشارات الأقمار الصناعية. وجود تلك الأقمار الصناعية الإضافية من جاليليو في المجال وفر أداءً ملاحيًا أكثر اتساقًا.
تم تصميم جاليليو خصيصًا للتطبيقات المدنية، بدقة أعلى من GPS القياسي. أقدر نظام مراقبة السلامة المتقدم الخاص به، الذي يساعد في اكتشاف الإشارات غير الموثوقة والتخفيف من آثارها. النظام متوافق أيضًا بشكل كامل مع GPS، مما يجعل التكامل سلسًا في أجهزة الاستقبال الحديثة.
في حين أن جاليليو لم يصل بعد إلى القدرة التشغيلية الكاملة، إلا أنه يقدم بالفعل خدمة ممتازة. القيد الوحيد الذي واجهته هو أن بعض أجهزة الاستقبال القديمة لا تدعمه، ولكن أي وحدة GNSS حديثة ستستفيد بشكل كامل من هذه الأقمار الصناعية.
بايدو (BDS)
نظام الملاحة بالأقمار الصناعية الصيني تطور بسرعة ليصبح لاعبًا عالميًا:
• البلد/المنطقة: الصين
• التشغيل الأولي: بايدو-1 (2000)، بايدو-2 (2012)، بايدو-3 (2020)
• الأقمار الصناعية: 35 قمرًا صناعيًا عاملاً
• خصائص المدار:
- مزيج من المدار الأرضي المتوسط (27 قمرًا صناعيًا على ارتفاع 21,500 كم)
- المدار الأرضي الثابت (5 أقمار صناعية)
- المدار الأرضي المتزامن المائل (3 أقمار صناعية)
• ترددات الإشارة:
- B1I (1561.098 ميجاهرتز)
- B1C (1575.42 ميجاهرتز) - نفس تردد GPS L1
- B2a (1176.45 ميجاهرتز) - نفس تردد GPS L5
- B2b (1207.14 ميجاهرتز) - نفس تردد جاليليو E5b
- B3I (1268.52 ميجاهرتز)
• الدقة:
- الخدمة العالمية: ~3-5 أمتار
- الخدمة الإقليمية: ~2-3 أمتار
بدأت استخدام أجهزة استقبال قادرة على التعامل مع بايدو حوالي عام 2022، وأثبت النظام أنه إضافة قيمة لنظام GNSS. الجانب الفريد في بايدو هو تصميم كوكبة هجين، مع أقمار صناعية في أنواع مدارات مختلفة. هذا يوفر تغطية محسنة في منطقة آسيا والمحيط الهادئ، حيث لاحظت أداءً قويًا بشكل خاص.
إحدى الميزات المثيرة للاهتمام في بايدو التي تفتقر إليها الأنظمة الأخرى هي قدرة المراسلة - يمكن للنظام بالفعل إرسال رسائل نصية قصيرة، على الرغم من أن هذا لا يستخدم عادة في تطبيقات الطائرات بدون طيار. تم الانتهاء من الخدمة العالمية الكاملة في عام 2020، مما يجعل بايدو أحدث نظام ملاحة عالمي كامل.
في تجربتي، كان دمج بايدو سلسًا في أجهزة الاستقبال الحديثة، على الرغم من أن الوثائق باللغة الإنجليزية كانت محدودة في الأيام الأولى. اليوم، إنه جزء قياسي من أجهزة استقبال الكوكبات المتعددة ويساهم بشكل كبير في الأداء الملاحي العام.
الأنظمة الإقليمية
بالإضافة إلى الأنظمة العالمية، توجد عدة أنظمة GNSS إقليمية يمكن أن توفر فوائد إضافية في مناطق محددة:
QZSS (نظام الأقمار الصناعية شبه السمتية)
• البلد/المنطقة: اليابان
• التغطية: اليابان ومنطقة آسيا وأوقيانوسيا
• الأقمار الصناعية: 4 أقمار صناعية عاملة
تم تصميم QZSS للعمل في المباني العالية في اليابان، مع أقمار صناعية في مدارات تبقيها على ارتفاعات عالية فوق اليابان. لقد رأيت أشخاصًا يطيرون بأجهزة استقبال تدعم QZSS في طوكيو، وكان التحسن في الأداء الحضري ملحوظًا - كانت عمليات الاستقرار في المكان أكثر استقرارًا بين المباني العالية مقارنة باستخدام الكوكبات العالمية وحدها.
NavIC (الملاحة بالكوكبة الهندية)
• البلد/المنطقة: الهند
• التغطية: الهند والمنطقة المحيطة بها (1,500 كم)
• الأقمار الصناعية: 7 أقمار صناعية عاملة
تم تحسين NavIC للقارة الهندية الفرعية. في حين أنني لم أختبره شخصيًا بشكل مكثف، يبلغ الزملاء الذين يطيرون في الهند عن نتائج جيدة عندما تدعم أجهزة الاستقبال الخاصة بهم هذا النظام الإقليمي بالإضافة إلى الكوكبات العالمية.
فوائد الكوكبات المتعددة للطائرات بدون طيار
استخدام كوكبات GNSS متعددة في وقت واحد يوفر العديد من المزايا لعمليات الطائرات بدون طيار. لقد شهدت هذه الفوائد بشكل مباشر مع تطوير أنظمة الملاحة الخاصة بي على مر السنين.
توفر أفضل للأقمار الصناعية
الفائدة الأكثر مباشرة لأجهزة استقبال الكوكبات المتعددة هي ببساطة وجود المزيد من الأقمار الصناعية في المجال:
• المزيد من الأقمار الصناعية المرئية: توفر الكوكبات المجمعة أكثر من 30 قمرًا صناعيًا مرئيًا في ظروف السماء المفتوحة. أرى بانتظام 20-25 قمرًا صناعيًا، مقارنة بـ 8-10 فقط مع GPS وحده.
• أداء في المناطق الحضرية ذات المباني العالية: تحديد موقع أفضل في المدن والمناطق المعاقة. لقد طرت بين المباني حيث قد تفقد أجهزة استقبال GPS فقط القدرة على التتبع، لكن أنظمة الكوكبات المتعددة حافظت على ملاحة مستقرة.
• تقليل التخفيف الهندسي للدقة (GDOP): المزيد من الأقمار الصناعية يعني هندسة أفضل وتحديد موقع أكثر دقة. هذا يترجم إلى تحليق وملاحة أكثر دقة.
• التأثير العملي: أختبر انقطاعات أقل في إشارة GPS أثناء الطيران، خاصة في البيئات الصعبة. وقد أنقذ ذلك العديد من طائراتي بدون طيار من احتمالية التحليق بعيدًا أو التحطم.
دقة معززة
الأنظمة المتعددة التي تعمل معًا تحسن الدقة الإجمالية لتحديد المواقع:
• متوسط الأخطاء: تساعد الأنظمة المتعددة في حساب متوسط الأخطاء الفردية للنظام. لقد لاحظت تحسن ثبات الموقع من دقة ±3 أمتار مع GPS وحده إلى دقة دون المتر مع أجهزة استقبال الأنظمة المتعددة.
• التحقق المتبادل: يمكن للمواقع من الأنظمة المختلفة التحقق من بعضها البعض، ورفض القيم الشاذة. وهذا قضى على "القفزات" العرضية في الموقع التي كنت أراها سابقًا مع أجهزة استقبال النظام الواحد.
• دقة محسنة: حسابات الموقع باستخدام المزيد من الأقمار الصناعية تكون عمومًا أكثر دقة. وهذا ملحوظ بشكل خاص في ثبات الارتفاع، الذي يميل إلى أن يكون البُعد الأضعف في تحديد مواقع GNSS.
• التأثير العملي: أصبحت طائراتي بدون طيار الآن تحافظ على ثبات موقع وملاحة أكثر استقرارًا، مما يجعل المهام الذاتية أكثر موثوقية ولقطات الفيديو أكثر سلاسة.
التكرار في النظام
ربما تكون الفائدة الأهم لعمليات الطائرات بدون طيار الحساسة هي التكرار:
• الحماية من الفشل: إذا واجه نظام واحد مشاكل، يمكن للأنظمة الأخرى التعويض. مرة طرت خلال منطقة بها تشويش على GPS (ربما غير متعمد)، لكن طائرتي بدون طيار استمرت في الملاحة بشكل طبيعي باستخدام GLONASS وGalileo.
• مقاومة التشويش: الترددات المختلفة تجعل التشويش الكامل أكثر صعوبة. هذا مهم بشكل خاص للعمليات المهنية حيث سلامة الإشارة أمر بالغ الأهمية.
• اكتشاف التزييف: التناقضات بين الأنظمة يمكن أن تشير إلى محاولات تزييف. على الرغم من ندرته، فإن تزييف GPS يشكل مصدر قلق متزايد لعمليات الطائرات بدون طيار الحساسة.
• التأثير العملي: وجدت أن وظائف العودة إلى المنزل والمهام الذاتية أصبحت أكثر موثوقية بشكل كبير مع أجهزة استقبال الأنظمة المتعددة. وهذا يوفر راحة البال أثناء رحلات الطيران طويلة المدى.
اكتساب أسرع
الحصول على قفل موقع بسرعة أمر مهم لعمليات الميدان الفعالة:
• المعالجة المتوازية: يمكن لأجهزة الاستقبال اكتساب إشارات من أنظمة متعددة في وقت واحد. هذا يقلل بشكل كبير من الوقت المستغرق في الانتظار قبل الإقلاع.
• تقليل زمن الحصول على أول إصلاح (TTFF): تأسيس أسرع للموقع عند بدء التشغيل. ما كان يستغرق دقائق أصبح يستغرق ثوانٍ الآن.
• تحسين البدء البارد: مفيد بشكل خاص لعمليات البدء البارد عندما لا يكون لجهاز الاستقبال بيانات أقمار صناعية حديثة. لقد رأيت أوقات البدء البارد تنخفض من 60+ ثانية إلى أقل من 30 ثانية مع أجهزة استقبال الأنظمة المتعددة.
• التأثير العملي: قفل GPS أسرع قبل الإقلاع يعني وقت انتظار أقل ووقت طيران أكثر. هذه قيمة خاصة في الإعدادات المهنية حيث الوقت يساوي المال.
تطور مستقبلات GNSS للطائرات بدون طيار
لقد استخدمت تقريبًا كل جيل من أجهزة استقبال GNSS في طائراتي بدون طيار، وكان التطور ملحوظًا. كل جيل جلب تحسينات كبيرة في الأداء والحجم والقدرات.
أجيال أجهزة الاستقبال
أجهزة GPS الأولى للطائرات بدون طيار (2010-2014)
استخدمت طائراتي الأولى المزودة بنظام GPS وحدات مثل Ublox LEA-6 وNEO-6. كانت ثورية في ذلك الوقت ولكنها بدائية بمعايير اليوم:
• الخصائص:
- استقبال GPS فقط
- معدلات تحديث أبطأ (1-5 هرتز)
- حساسية أقل
- حجم أكبر
- استهلاك أعلى للطاقة
• الأداء:
- الدقة: 5-10 أمتار
- زمن الحصول على أول إصلاح: 45-60 ثانية للبدء البارد
- سعة الأقمار الصناعية: 12-16 قناة
أتذكر إحباط الانتظار للحصول على قفل GPS قبل كل رحلة، غالبًا واقفًا في حقل مفتوح لعدة دقائق. كان ثبات الموقع تقريبيًا في أحسن الأحوال، مع انجراف الطائرة بدون طيار عدة أمتار في كل اتجاه. كانت تجربة العودة إلى المنزل مثيرة للأعصاب - لم تكن تعرف أبدًا أين ستقرر الطائرة بدون طيار أن "المنزل" موجود!
GNSS من الجيل المتوسط (2015-2018)
في مرحلة ما قمت بالترقية إلى وحدات مثل Ublox NEO-7 وNEO-M8N، التي جلبت تحسينات كبيرة:
• الخصائص:
- استقبال GPS + GLONASS
- معدلات تحديث معتدلة (5-10 هرتز)
- حساسية محسنة
- عوامل شكل أصغر
- استهلاك منخفض للطاقة
• الأداء:
- الدقة: 2-5 أمتار
- زمن الحصول على أول إصلاح: 30-45 ثانية للبدء البارد
- سعة الأقمار الصناعية: 32-72 قناة
كانت إضافة GLONASS بمثابة تغيير جذري للموثوقية. لاحظت على الفور أن طائراتي بدون طيار حافظت على قفل الموقع في المناطق التي كانت تكافح فيها سابقًا. أصبح M8N العمود الفقري لملاحة الطائرات بدون طيار خلال هذه الفترة - لا يزال لدي العديد من الطائرات بدون طيار تطير بهذه الوحدات اليوم.
GNSS الحديث (2019-2022)
في عام 2022، بدأت بترقية أسطولي إلى وحدات مثل Ublox NEO-M9N وSAM-M8Q:
• الخصائص:
- أنظمة متعددة (GPS, GLONASS, Galileo, BeiDou)
- معدلات تحديث أسرع (10-18 هرتز)
- حساسية عالية
- تصاميم مدمجة
- تشغيل فعال للطاقة
• الأداء:
- الدقة: 1-3 أمتار
- زمن الحصول على أول إصلاح: 15-30 ثانية للبدء البارد
- سعة الأقمار الصناعية: 72-184 قناة
كان تحسن الأداء كبيرًا. أصبح ثبات الموقع صلبًا كالصخر، وتحسنت دقة العودة إلى المنزل لتصبح ضمن متر من نقطة الإقلاع. وفرت القدرة على استخدام جميع الأنظمة الأربعة الرئيسية في وقت واحد تكرارًا وأداءً ممتازين في البيئات الصعبة.
أحدث جيل (2023-الحاضر)
تستخدم بناءاتي الأحدث وحدات متطورة مثل Ublox NEO-M10 وZED-F9P (لتطبيقات RTK):
• الخصائص:
- أنظمة متعددة كاملة، ترددات متعددة
- معدلات تحديث عالية (تصل إلى 25 هرتز)
- حساسية عالية للغاية
- حزم فائقة الصغر
- استهلاك منخفض جدًا للطاقة
- قدرة RTK في النماذج عالية المستوى
• الأداء:
- الدقة: 0.5-2 متر (قياسي)، 1-3 سم (RTK)
- زمن الحصول على أول إصلاح: 5-15 ثانية للبدء البارد
- سعة الأقمار الصناعية: 184+ قناة
تمثل هذه الوحدات الأحدث قفزة نوعية في الأداء. توفر سلسلة M10 حساسية استثنائية وكفاءة في استخدام الطاقة، بينما يجلب F9P دقة RTK من مستوى المسح للطائرات بدون طيار الاستهلاكية. لقد أثار إعجابي بشكل خاص أداؤها في البيئات الصعبة مثل المناطق الحضرية وظل غابات خفيف.
نظرة مفصلة على وحدات GNSS الشائعة للطائرات بدون طيار
على مر السنين، استخدمت معظم وحدات GNSS الشائعة في مختلف البناءات. إليك تقييمي لقدراتها وتطبيقاتها المثالية:
Ublox NEO-M8N
العمود الفقري لنظام GNSS للطائرات بدون طيار لسنوات عديدة، ولا يزال يستخدم على نطاق واسع:
• الأنظمة: GPS، GLONASS، Galileo، BeiDou (استقبال متزامن لما يصل إلى 3)
• القنوات: 72 قناة تتبع
• معدل التحديث: يصل إلى 10 هرتز (عادة 5 هرتز في الطائرات بدون طيار)
• الحساسية: -167dBm للتتبع
• الدقة: 2.5م CEP (الخطأ الدائري المحتمل)
• استهلاك الطاقة: 23 مللي أمبير @ 3.3 فولت
لقد قمت بتثبيت عشرات من وحدات M8N في طائرات بدون طيار مختلفة، وهي توفر توازناً ممتازاً بين الأداء والتكلفة. تدعم الوحدة استقبال متزامن لما يصل إلى ثلاثة أنظمة ملاحة، على الرغم من أنني عادة ما أستخدم GPS+GLONASS للحصول على أفضل مزيج من الأداء وكفاءة الطاقة.
أحد القيود التي اكتشفتها هي أن تمكين جميع أنظمة الملاحة في وقت واحد يمكن أن يسبب في بعض الأحيان مشاكل في التتبع بسبب قيود القنوات. بالنسبة لمعظم التطبيقات، يوفر GPS+GLONASS أو GPS+Galileo أفضل النتائج.

لا يزال M8N خياراً قوياً للملاحة عامة الغرض، والعودة إلى المنزل، وثبات الموقع. تشمل التطبيقات الشائعة BN-180 وBN-220 والعديد من وحدات FC المدمجة.
Ublox NEO-M9N
الخلف المطور لـ M8N، يقدم تحسينات كبيرة:
• أنظمة الملاحة: GPS، GLONASS، Galileo، BeiDou (استقبال متزامن للجميع)
• القنوات: 184 قناة تتبع
• معدل التحديث: يصل إلى 25 هرتز (عادة 10 هرتز في الطائرات بدون طيار)
• الحساسية: -167dBm للتتبع
• الدقة: 1.5 متر CEP (الخطأ الدائري المحتمل)
• استهلاك الطاقة: 45 مللي أمبير @ 3.3 فولت (الاكتساب)، 34 مللي أمبير (التتبع)
عندما قمت بترقية طائرتي بدون طيار الرئيسية طويلة المدى من M8N إلى M9N، كان الفرق ملحوظاً على الفور. يمكن لـ M9N تتبع جميع الأنظمة في وقت واحد دون قيود للقنوات، مما يوفر تكرارية وأداء ممتازين.
يؤدي معدل التحديث الأعلى (10 هرتز مقابل 5 هرتز) إلى ملاحة أكثر سلاسة وتعديلات موضع أكثر استجابة. لقد وجدت أن M9N ذو قيمة خاصة للملاحة الدقيقة ومهام نقاط الطريق، حيث تشكل الدقة المحسنة فرقاً ملحوظاً.

أحد العيوب هو استهلاك الطاقة المرتفع قليلاً، على الرغم من أنه لا يزال ضئيلاً في سياق استخدام طاقة الطائرة بدون طيار الإجمالية. تشمل التطبيقات الشائعة Matek M9N-5883 وHGLRC M9N.
Ublox NEO-M10S
أحدث جيل قياسي من GNSS، يدفع حدود الأداء:
• أنظمة الملاحة: GPS، GLONASS، Galileo، BeiDou، QZSS، NavIC (استقبال متزامن للجميع)
• القنوات: 184+ قناة تتبع
• معدل التحديث: يصل إلى 25 هرتز
• الحساسية: -170dBm للتتبع
• الدقة: 1.0 متر CEP (الخطأ الدائري المحتمل)
• استهلاك الطاقة: 38 مللي أمبير @ 3.3 فولت (طاقة كاملة)، 12 مللي أمبير (توفير الطاقة)
لقد بدأت مؤخراً في اختبار سلسلة M10 في أحدث تصميماتي، والتحسينات دقيقة ولكنها ذات مغزى. الميزة البارزة هي كفاءة الطاقة الاستثنائية - يمكن لوضع Super-E تقليل استهلاك الطاقة بنسبة تصل إلى 70٪ مع الحفاظ على الأداء.
الحساسية المحسنة (-170dBm مقابل -167dBm) تترجم إلى أداء أفضل في البيئات الصعبة مثل الوديان الحضرية أو تحت الغطاء الشجري الخفيف. لقد لاحظت تتبعاً أكثر اتساقاً للأقمار الصناعية في المناطق التي كانت الأجيال السابقة تفقد فيها الاتصال في بعض الأحيان.

M10 مثالي للمهام طويلة المدى حيث تهم كفاءة الطاقة، وللطيران في البيئات الصعبة. لا يزال جديداً نسبياً في سوق الطائرات بدون طيار، لكنني أتوقع أن يصبح المعيار الجديد مع تحسن التوفر.
Ublox ZED-F9P
وحدة عالية الدقة قادرة على RTK للتطبيقات المهنية:
• أنظمة الملاحة: GPS، GLONASS، Galileo، BeiDou (استقبال متزامن للجميع)
• القنوات: 184 قناة تتبع
• معدل التحديث: يصل إلى 25 هرتز
• الحساسية: -167dBm للتتبع
• الدقة: 1.0 متر CEP قياسي، 1 سم + 1 جزء في المليون مع RTK
• استهلاك الطاقة: 68 مللي أمبير @ 3.3 فولت
بالنسبة لطائراتي بدون طيار للرسم الخرائطي والمسح، كان F9P تحولياً. يتيح الاستقبال متعدد النطاقات (L1/L2/L5) وقدرة RTK تحديد المواقع على مستوى السنتيمتر، وهو أمر ضروري للتطبيقات الدقيقة.
إعداد RTK يتطلب مكونات إضافية - محطة قاعدة أو خدمة NTRIP للتصحيحات، بالإضافة إلى رابط بيانات لنقل تلك التصحيحات إلى الطائرة بدون طيار. أستخدم اتصال 4G/LTE لطائرة المسح الخاصة بي، مما يسمح لي بتلقي تصحيحات NTRIP من الخدمات العامة.

F9P هو أكثر مما تحتاجه طائرات FPV أو التصوير القياسية، لكنه لا يقدر بثمن لتطبيقات رسم الخرائط، والمسح، والزراعة الدقيقة، والهبوط الآلي. تشمل التطبيقات الشائعة Here3 وHolybro H-RTK F9P.
دليل اختيار الوحدة
يعتمد اختيار وحدة GNSS المناسبة على احتياجاتك المحددة. إليك نصيحتي العملية بناءً على سنوات من بناء وطيران تكوينات مختلفة:
للملاحة الأساسية
• الموصى به: NEO-M8N أو ما يعادله
• الاعتبارات الرئيسية:
- كافٍ للعودة إلى المنزل وثبات الموقع
- توازن جيد بين الأداء والتكلفة
- مدعوم على نطاق واسع في جميع برامج الملاحة
- يتضمن عادة بوصلة
ما زلت أستخدم وحدات M8N في العديد من تصميماتي لأنها فعالة من حيث التكلفة وتؤدي بشكل جيد للملاحة العامة. إذا كنت تبني طائرة FPV قياسية مع احتياجات ثبات موقع والعودة إلى المنزل متقطعة، فإن M8N لا يزال خياراً قوياً.
للملاحة المتقدمة
• الموصى به: NEO-M9N أو ما يعادله
• الاعتبارات الرئيسية:
- أفضل لمهام نقاط الطريق
- تحديثات أسرع للموقع
- أكثر موثوقية في البيئات الصعبة
- تستحق الترقية للملاحة الجادة
بالنسبة لطائراتي ذاتية التحكم بنقاط الطريق والطائرات طويلة المدى، قمت بتوحيد استخدام M9N. تحسن الدقة ومعدل التحديث يحدث فرقًا ملحوظًا في أداء الملاحة، والقدرة على استخدام جميع الأنظمة الفلكية في وقت واحد يحسن الموثوقية في البيئات المتنوعة.
للتطبيقات المهنية
• الموصى به: NEO-M10 أو ZED-F9P
• الاعتبارات الرئيسية:
- M10 لأفضل أداء قياسي لنظام GNSS
- F9P عندما تكون الدقة بالسنتيمتر مطلوبة
- الأخذ بعين الاعتبار تأثيرات الطاقة والوزن
- قد تتطلب إعدادًا وتكوينًا إضافيًا
تستخدم طائراتي المخصصة للمسح ورسم الخرائط F9P للحصول على دقة بالسنتيمتر في تحديد المواقع. للاستكشاف طويل المدى حيث تكفي الدقة القياسية على مستوى المتر ولكن الموثوقية ذات أهمية قصوى، يوفر M10 أفضل توليفة من الأداء وكفاءة الطاقة.
للمدى الطويل/التحمل
• الموصى به: NEO-M10 مع إدارة الطاقة
• الاعتبارات الرئيسية:
- كفاءة الطاقة تصبح حاسمة
- الموثوقية ذات أهمية قصوى
- النظر في جودة الهوائي وموضعه
- يوصى بأنظمة ملاحة احتياطية
بالنسبة لطائراتي ذات المدى الأطول، تعتبر كفاءة الطاقة والموثوقية من الأولويات القصوى. يوفر وضع Super-E في M10 توفيرًا ممتازًا للطاقة مع الحفاظ على الأداء. كما أنني أولي اهتمامًا خاصًا بجودة الهوائي وموضعه، حيث يصبح استقبال الإشارة مهمًا بشكل متزايد كلما طرت لمسافة أبعد.
تنفيذ وحدة GNSS
كيفية تنفيذ وحدة GNSS قد تكون بنفس أهمية اختيار الوحدة نفسها. لقد تعلمت العديد من الدروس حول التثبيت الأمثل من خلال التجربة والخطأ.
التكامل العتادي
اعتبارات الهوائي
الهوائي أمر بالغ الأهمية لأداء GNSS - وهو درس تعلمته بطريقة صعبة بعد العديد من التجارب مع وضع الهوائي دون المستوى الأمثل:
• هوائيات الرقعة: الأكثر شيوعًا في وحدات الطائرات بدون طيار
- المزايا: مدمجة، اتجاهية للأعلى، رؤية جيدة للسماء
- العيوب: يختلف الأداء حسب الاتجاه
- أفضل الممارسات: التثبيت بشكل مسطح مع رؤية واضحة للسماء

معظم طائراتي بدون طيار تستخدم هوائيات الرقعة، والتي تعمل بشكل جيد عند تثبيتها بشكل مسطح على اللوحة العلوية مع رؤية واضحة للسماء. لقد وجدت أن حتى الإمالة الطفيفة يمكن أن تقلل من الأداء، لذلك أحرص على التأكد من أن الهوائي مستوٍ تمامًا.
• الهوائيات الحلزونية: توجد في بعض الوحدات عالية الأداء
- المزايا: استقبال أفضل عند الارتفاعات المنخفضة، أقل حساسية للاتجاه
- العيوب: أكبر حجمًا، أكثر تكلفة
- أفضل الممارسات: لا تزال تحتاج إلى تعرض معقول للسماء

بالنسبة لطائراتي ذات المدى الطويل، أفضل الهوائيات الحلزونية رغم حجمها الأكبر. فهي أقل حساسية للاتجاه وتوفر استقبالًا أفضل عندما تميل الطائرة أثناء الدوران، مما يساعد على الحفاظ على اتصال الأقمار الصناعية أثناء المناورات العدوانية.
• الهوائيات الخارجية: خيار لبعض الوحدات
- المزايا: مرونة في الوضع، أداء أفضل محتمل
- العيوب: وزن إضافي، تعقيد، احتمالية التلف
- أفضل الممارسات: استخدام كابل عالي الجودة، تقليل الطول
أستخدم الهوائيات الخارجية على طائراتي لرسم الخرائط لفصل الهوائي عن مصادر التداخل. المفتاح هو استخدام كابلات قصيرة عالية الجودة - لقد تعلمت من خلال التجربة أن الكابلات الرخيصة يمكن أن تؤدي إلى تدهور الإشارة بشكل كبير.
المستوى الأرضي
المستوى الأرضي يؤثر على أداء الهوائي - وهو تفصيل يتجاهله العديد من البناة:
• الغرض: يعكس الإشارات ويحسن الاستقبال
• التنفيذ: لوحة معدنية أو منطقة PCB تحت الهوائي
• الحجم: من الناحية المثالية قطر 60-80 مم على الأقل للأداء الأمثل
• البدائل: بعض الوحدات تتضمن مستوى أرضي مدمج

بعد تجربة تكوينات مختلفة للمستوى الأرضي، وجدت أن قرص ألومنيوم بسيط (بقطر حوالي 70 مم) تحت وحدة GNSS يمكن أن يحسن الاستقبال بمقدار 2-3 ديسيبل - أي ما يعادل حساسية أفضل بنسبة 30-50٪. بالنسبة للوحدات التي لا تحتوي على مستويات أرضية مدمجة، تحدث هذه الإضافة البسيطة فرقًا ملحوظًا في اكتساب الأقمار الصناعية والاحتفاظ بها.
موقع التركيب
يؤثر موقع وضع وحدة GNSS بشكل كبير:
• تركيب الكومة: داخل الإطار
- المزايا: الحماية من التحطم
- العيوب: تداخل محتمل من الإلكترونيات، حجب رؤية السماء
- أفضل الممارسات: فقط مع وحدات عالية الحساسية، حجب ألياف الكربون
لقد جربت تركيب وحدات GNSS داخل الإطار، لكن النتائج كانت مخيبة للآمال بسبب انسداد الإشارة من اللوحة العلوية. أوصي بهذا النهج فقط للطائرات الصغيرة جدًا حيث لا يكون التركيب العلوي عمليًا، وفقط مع الوحدات عالية الحساسية.
• اللوحة العلوية: الموقع الأكثر شيوعًا
- المزايا: رؤية واضحة للسماء، بعيدًا عن تداخل الأرض
- العيوب: التعرض لأضرار التحطم
- أفضل الممارسات: وسط الطائرة بدون طيار إذا أمكن

معظم طائراتي بدون طيار تحتوي على وحدة GNSS مثبتة على اللوحة العلوية، مما يوفر أفضل رؤية للسماء. عادة ما أضعها في الخلف في صينية ممتدة مطبوعة ثلاثية الأبعاد للتوازن وتقليل تأثير إمالة الإطار أثناء الطيران.
• تركيب على سارية: مرتفع فوق الإطار
- المزايا: رؤية ممتازة للسماء، تداخل أقل
- العيوب: قابلية التعرض للتحطم، وزن إضافي
- أفضل الممارسات: استخدامه مع علبة واقية

بالنسبة لطائراتي المخصصة للتخطيط حيث يكون أداء GNSS أمرًا بالغ الأهمية، أستخدم حوامل السارية لرفع الهوائي فوق جميع مصادر التداخل المحتملة. المفتاح هو استخدام علبة واقية أو تصميم يمكنه تحمل الاصطدامات - لقد فقدت بعض الهوائيات أثناء تعلم هذا الدرس!
تخفيف التداخل
إشارات GNSS ضعيفة جدًا وعرضة للتداخل - وهي حقيقة أصبحت على دراية وثيقة بها من خلال استكشاف أخطاء الاستقبال الضعيف:
• مصادر التداخل:
- أنظمة توزيع الطاقة
- أجهزة إرسال الفيديو
- ضوضاء المحرك ومتحكم السرعة الإلكتروني
- حجب الألياف الكربونية
- أنظمة الراديو الأخرى
• استراتيجيات التخفيف:
- الحفاظ على المسافة من أسلاك الطاقة وأجهزة إرسال الفيديو
- استخدام كابلات محمية لوحدة GNSS
- إضافة نواة فيريت إلى أسلاك الطاقة
- النظر في مواد حجب الترددات الراديوية
- إبقاء الهوائيات بعيدًا عن الألياف الكربونية
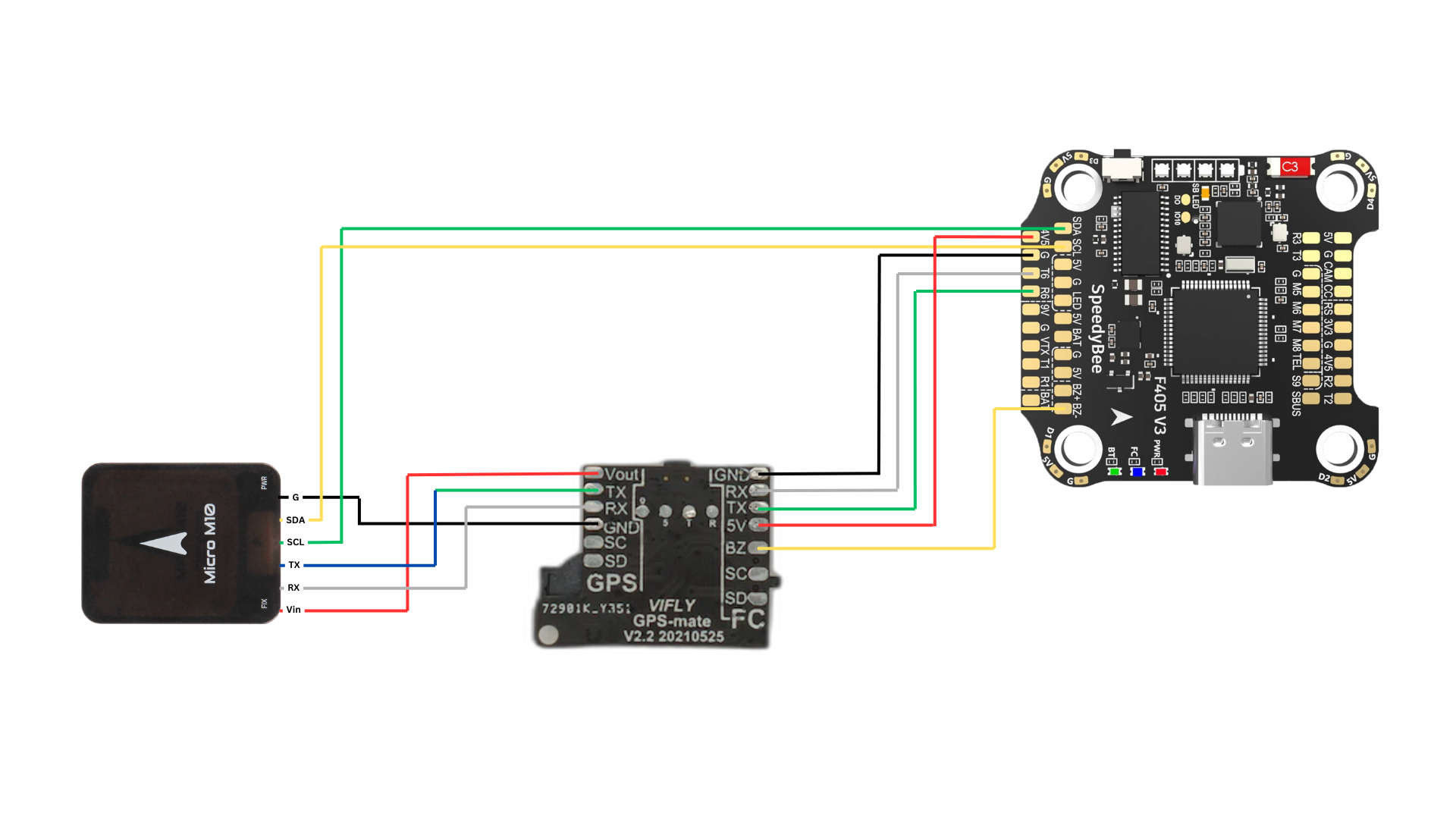
أحد أهم الدروس التي تعلمتها هو أهمية إبقاء هوائي GNSS بعيدًا عن أجهزة إرسال الفيديو. في إحدى عمليات البناء، كان لدي مشاكل استقبال مستمرة حتى أدركت أن هوائي جهاز إرسال الفيديو كان على بعد 3 سم فقط من هوائي GPS. نقله إلى الطرف المقابل من الإطار حل المشكلة على الفور.
لسوء الحظ، في معظم عمليات البناء الخاصة بي، تصبح المساحة مصدر قلق وليس لدي دائمًا إمكانية وضع وحدة GPS معزولة تمامًا عن الهوائيات الأخرى. في مثل هذه الحالات، تكون منتجات مثل GPS-mate بمثابة منقذ حقيقي للحياة.

بالنسبة للتركيبات ذات ألواح الألياف الكربونية العلوية، أستخدم دائمًا دعامة غير موصلة لرفع وحدة GNSS بمقدار 10-15 مم على الأقل فوق الألياف الكربونية. يمكن أن يؤدي هذا التغيير البسيط إلى تحسين الاستقبال بشكل كبير من خلال منع الألياف الكربونية من حجب إشارات الأقمار الصناعية.
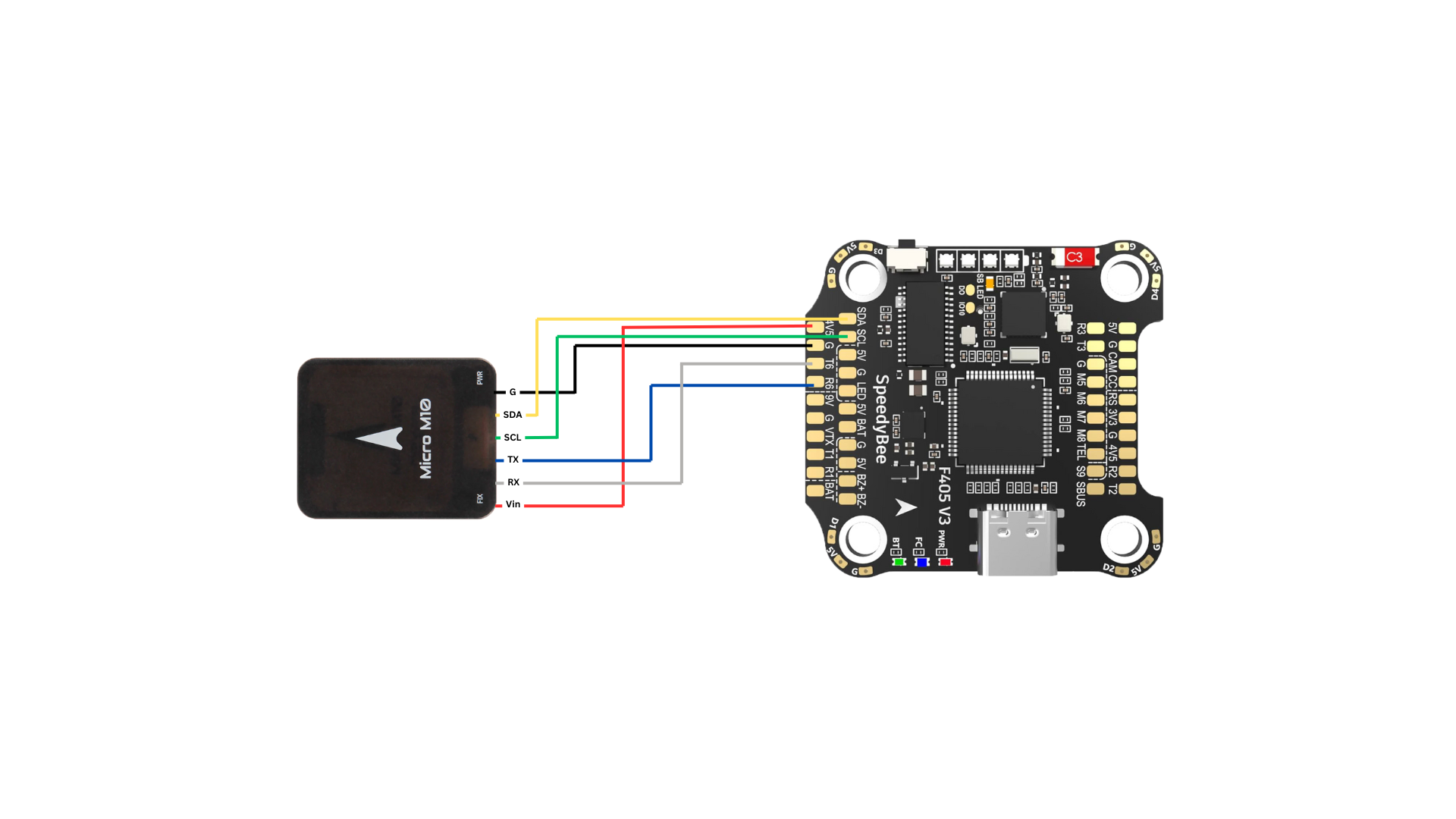
التوصيلات السلكية
تكوين البرمجيات
إعدادات البرامج الثابتة
توفر البرامج الثابتة الحديثة لوحدة التحكم في الطيران خيارات تكوين متنوعة لـ GNSS. فيما يلي ما وجدت أنه يعمل بشكل أفضل في الأنظمة المختلفة:
إعدادات INAV GNSS
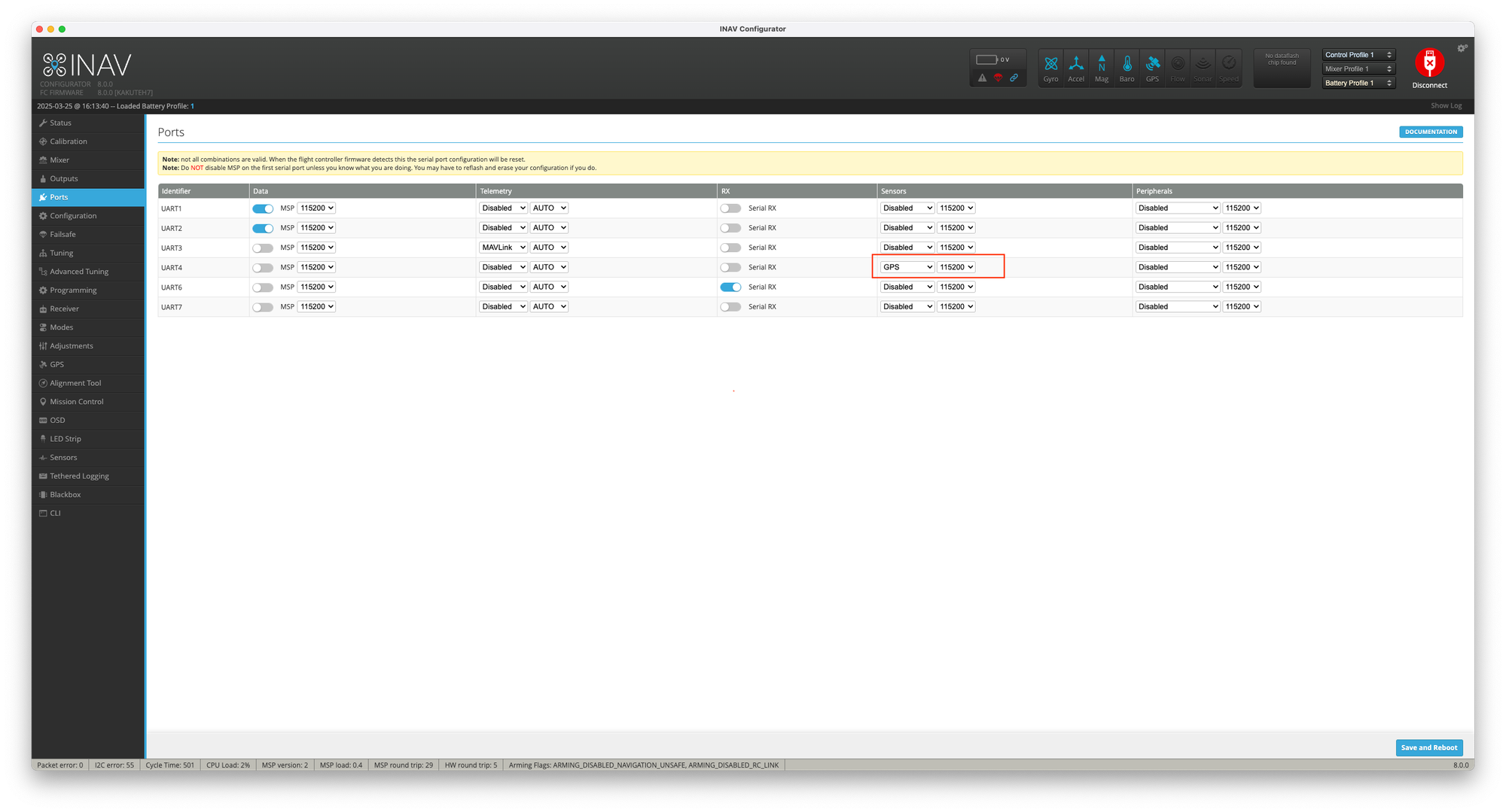
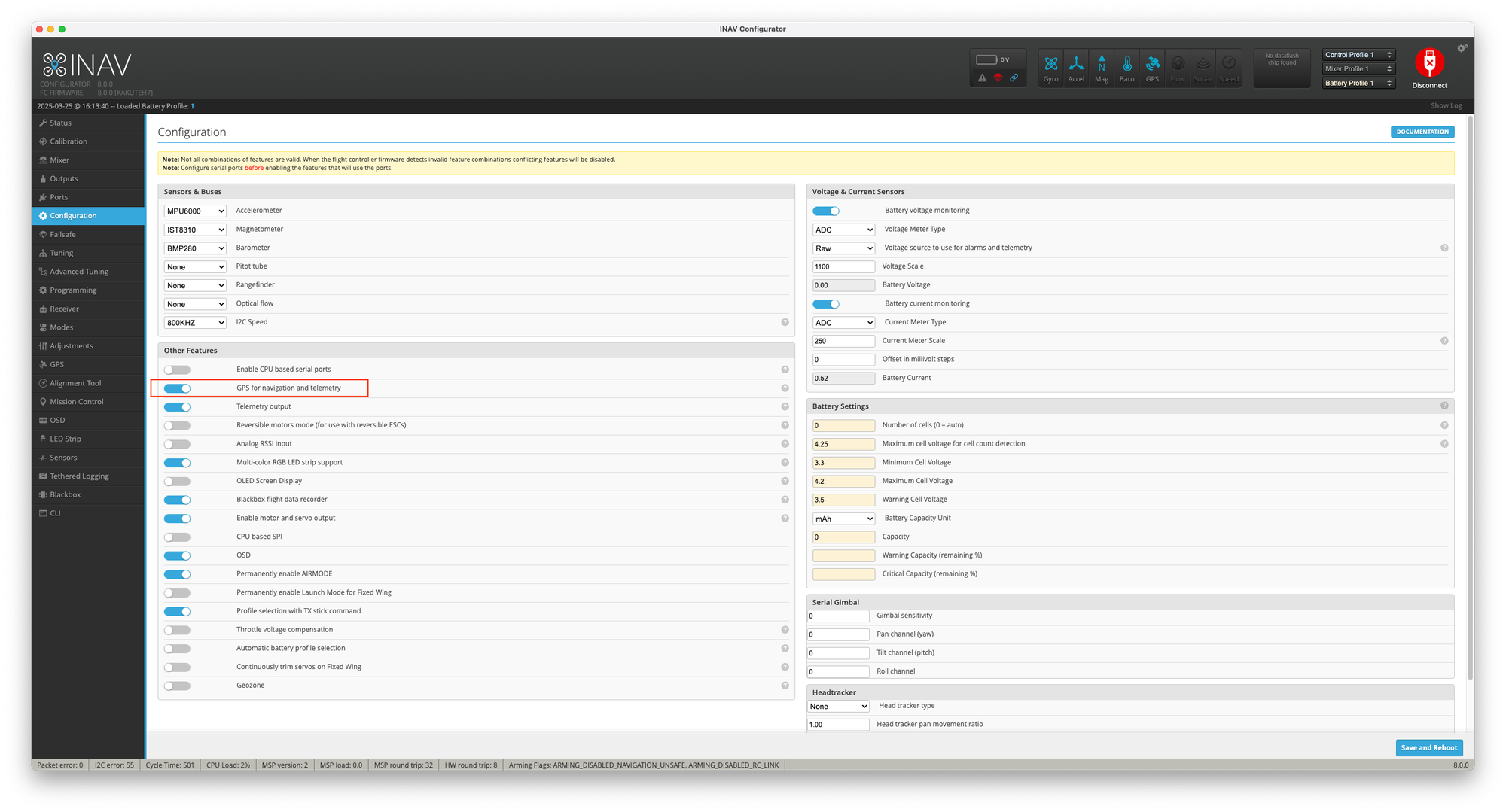
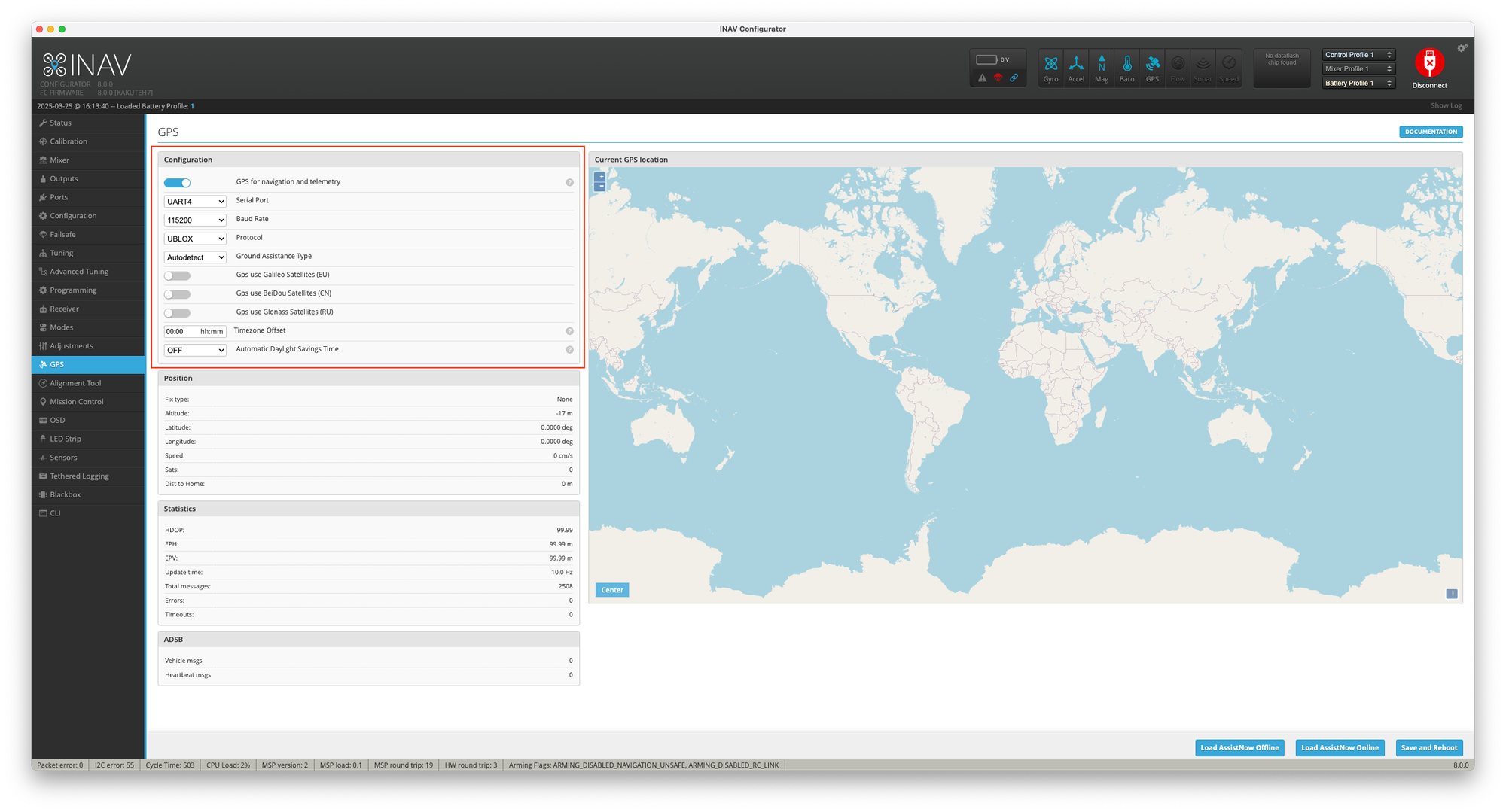
وجدت أن الجمع بين نظام GNSS وبيانات مقياس الضغط الجوي يوفر أكثر ثبات لتحديد الارتفاع. إضافة البوصلة المغناطيسية (UBLOX+BARO+MAG) يمكن أن تحسن تقدير الموقع في بعض الحالات، لكنها أكثر عرضة للتداخل. أصبح هناك اتجاه للابتعاد عن البوصلات المغناطيسية مع تطور دقة تحديد المواقع عبر GPS.
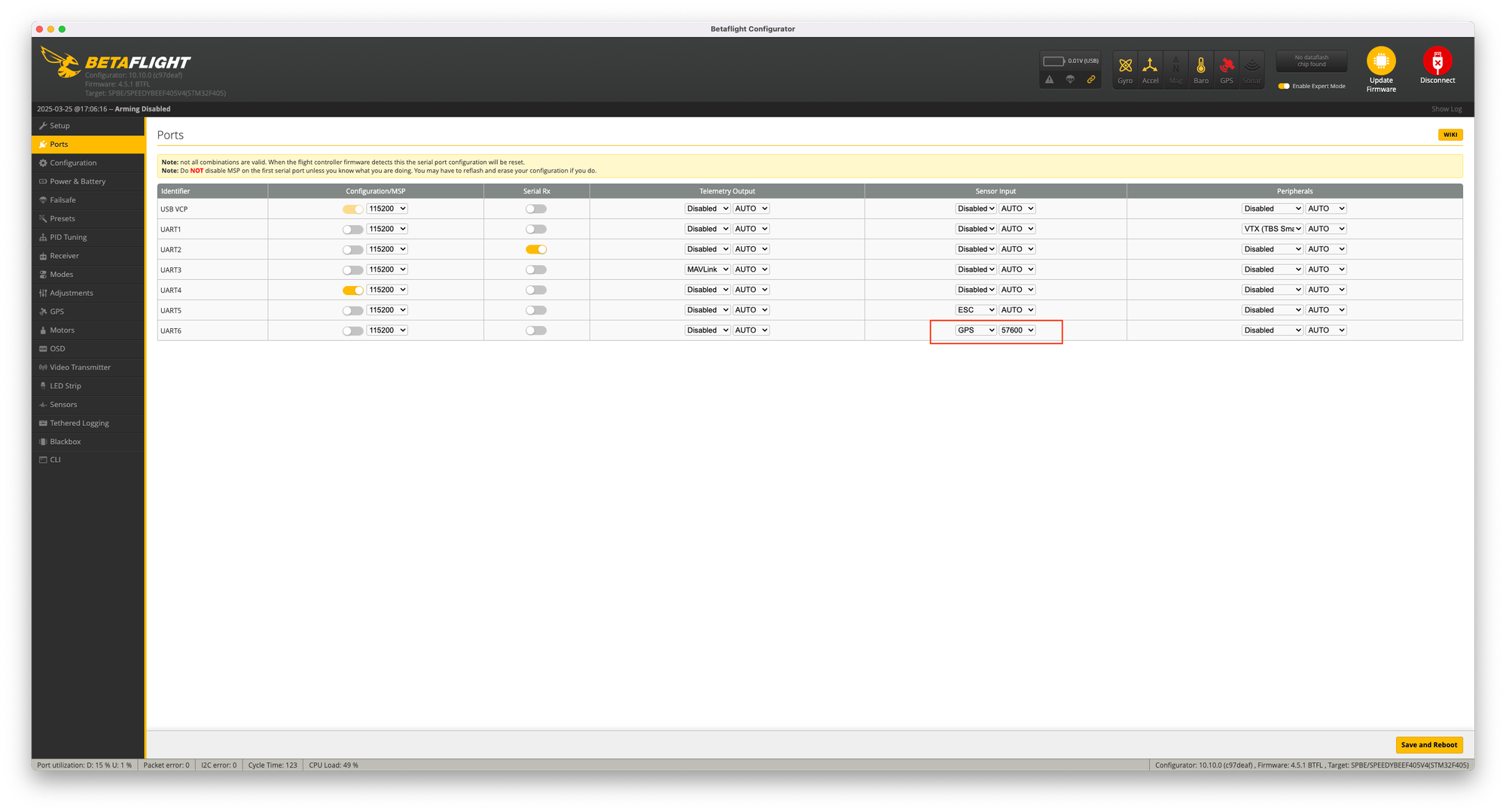
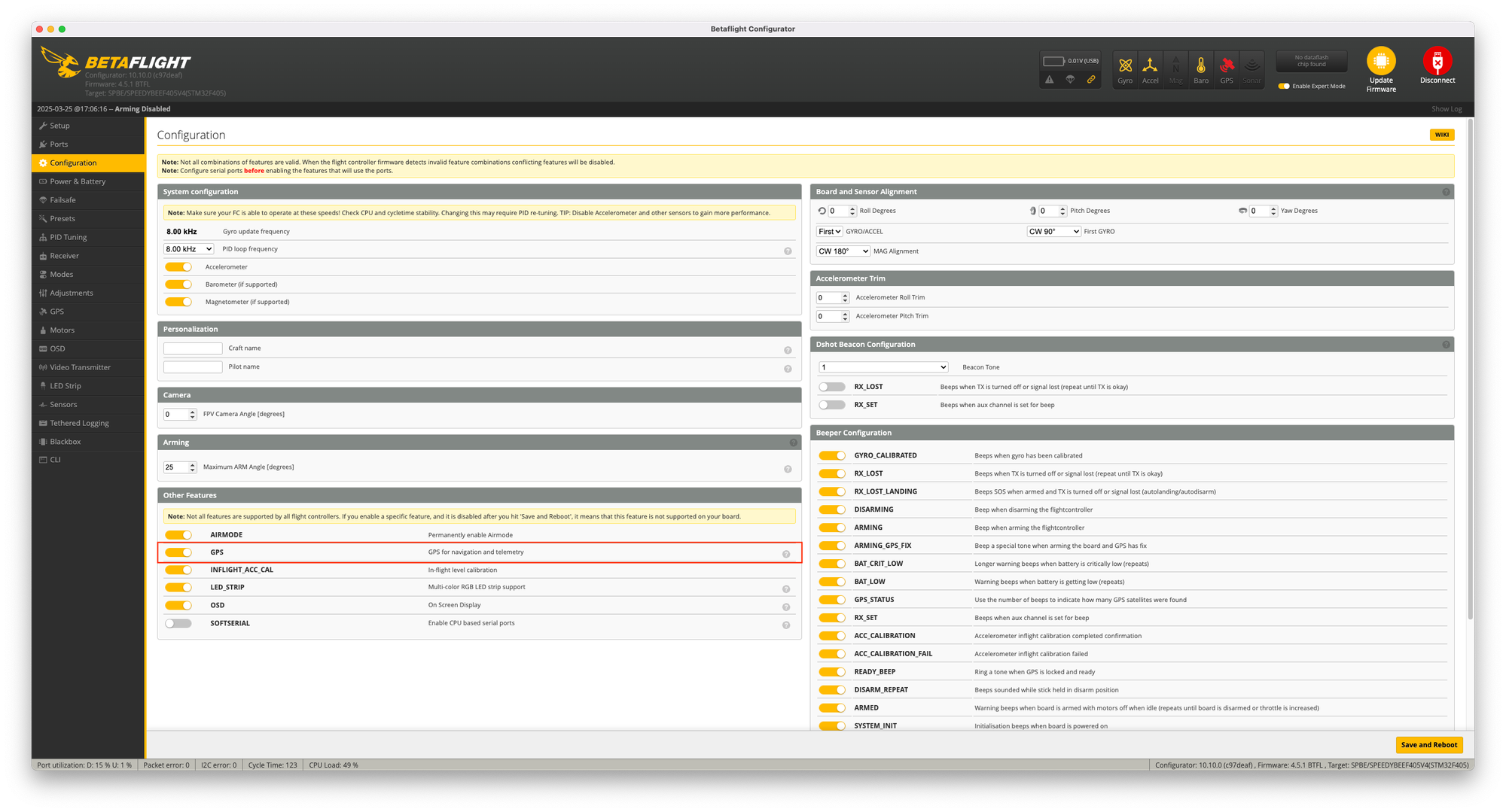
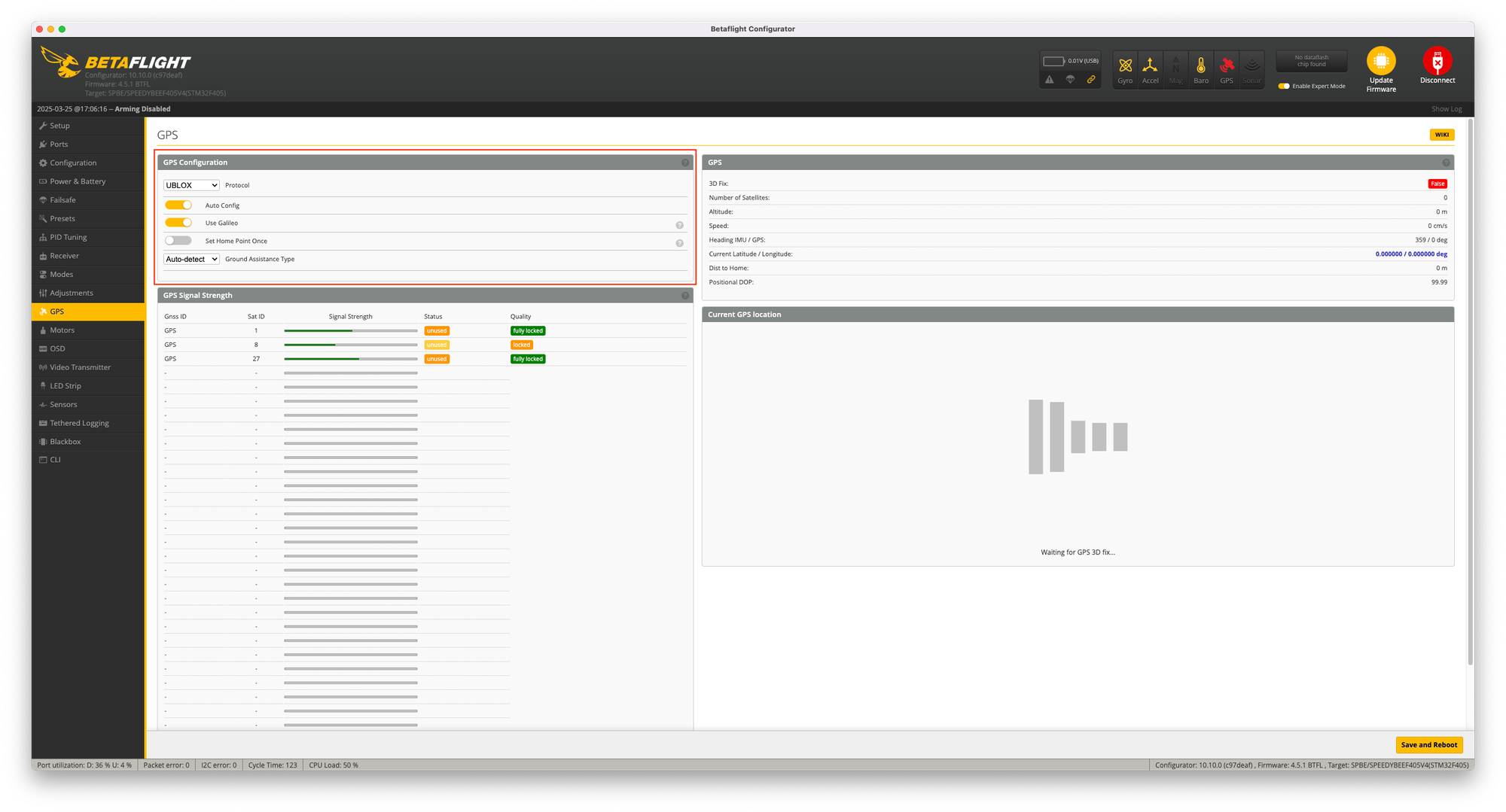
إعدادات GPS في Betaflight
بالنسبة لطائراتي الحرة وطائرات السباق المزودة بخاصية الإنقاذ بواسطة GPS، أستخدم التكوين التالي بشكل افتراضي:
مواضيع GNSS المتقدمة
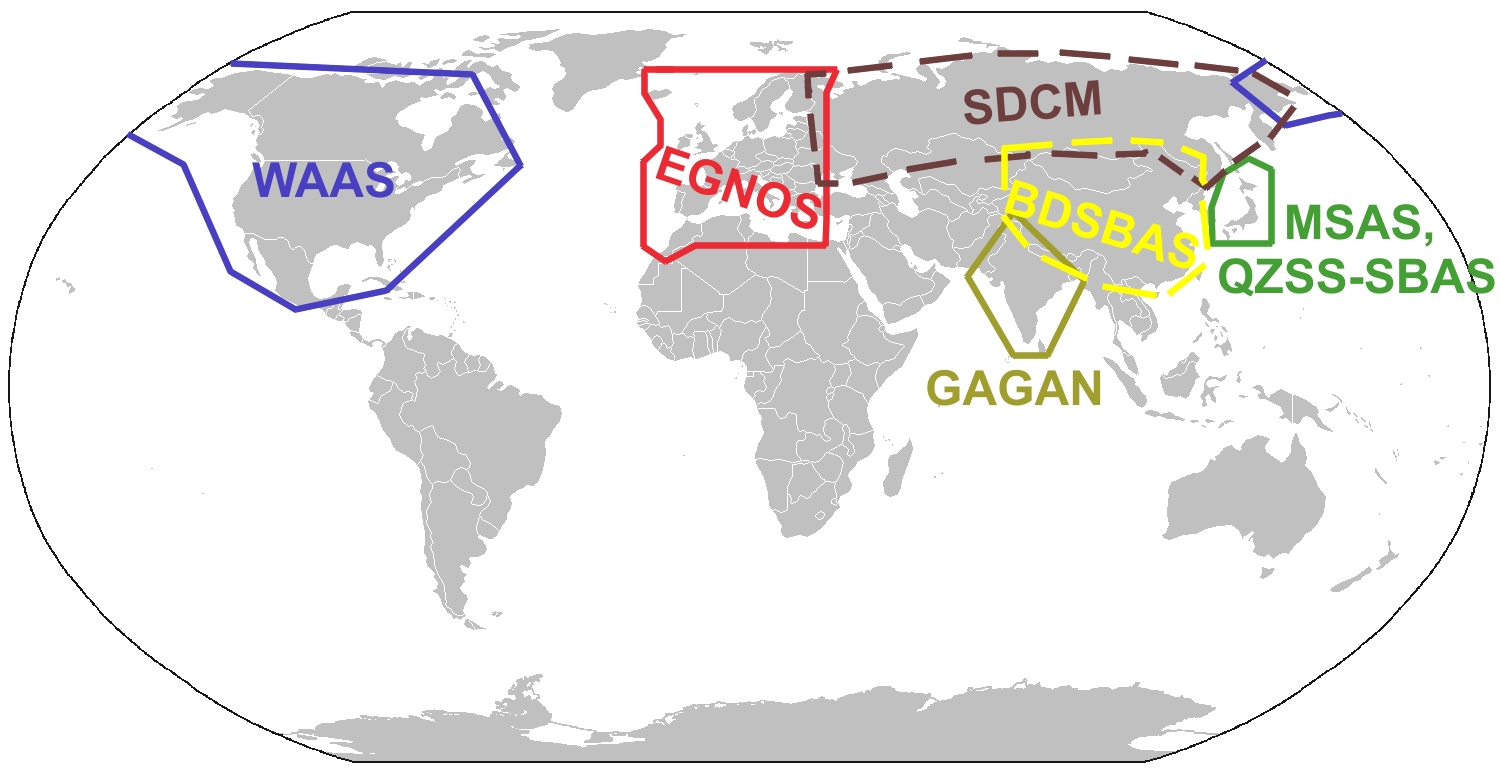
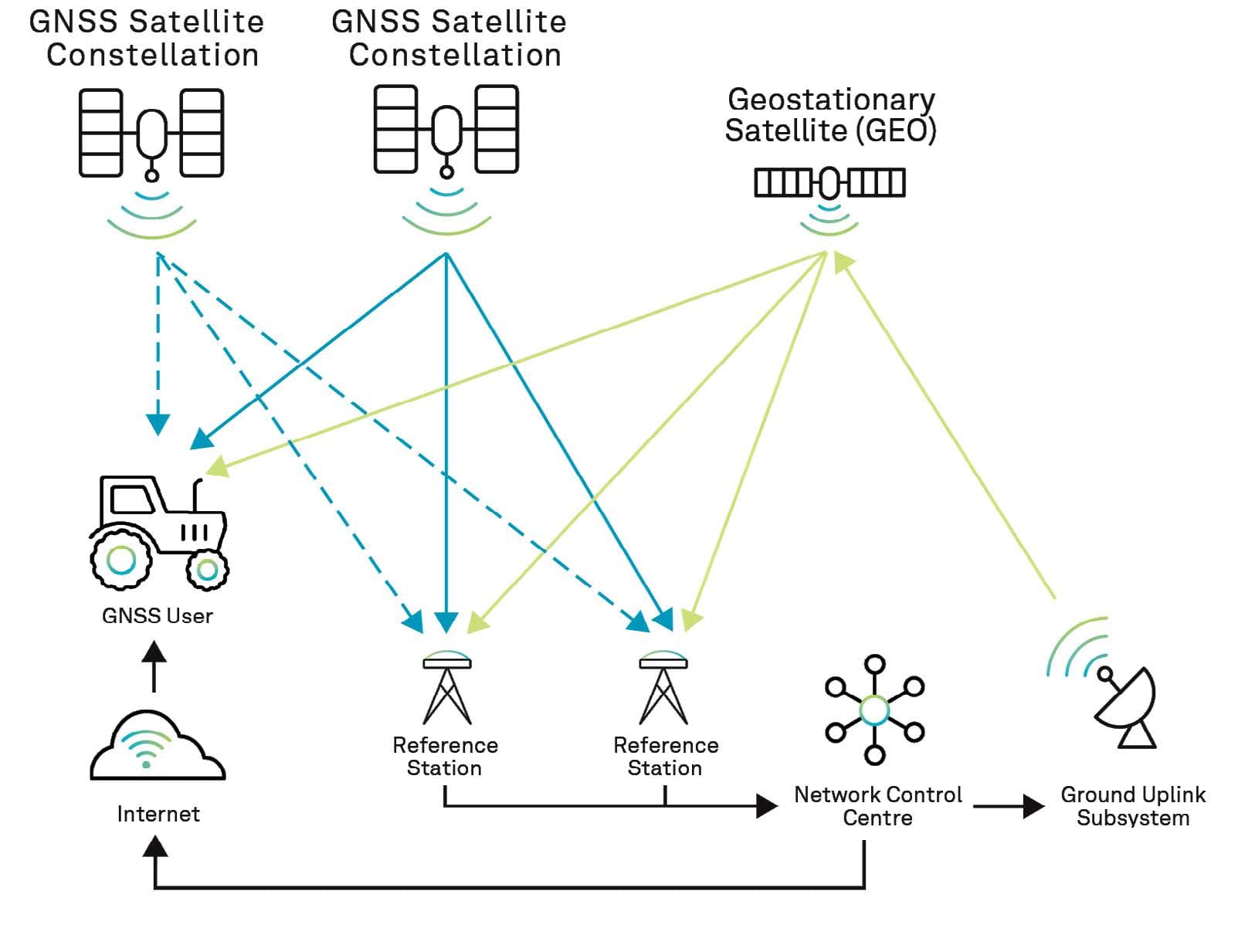
SBAS (نظام التعزيز المعتمد على الأقمار الصناعية)
لقد كانت الأنظمة الإقليمية التي تحسن دقة GNSS ذات فائدة كبيرة في تجربتي:
• WAAS (نظام التعزيز واسع النطاق): أمريكا الشمالية
• EGNOS (خدمة الملاحة المغطاة بالأقمار الصناعية الأوروبية): أوروبا
• MSAS (نظام تعزيز الأقمار الصناعية متعدد الوظائف): اليابان
• GAGAN (الملاحة المعززة بالأقمار الصناعية المساعدة لنظام تحديد المواقع العالمي): الهند
• SDCM (نظام التصحيحات التفاضلية والمراقبة): روسيا
توفر هذه الأنظمة بيانات تصحيح يمكن أن تحسن الدقة من 3-5 متر إلى 1-2 متر. لاحظت الفوائد بشكل أوضح عند الطيران في أوروبا مع EGNOS وفي أمريكا الشمالية مع WAAS. تعتبر التصحيحات قيمة بشكل خاص لدقة الارتفاع، والتي تكون عادةً البُعد الأضعف في تحديد المواقع بواسطة GNSS.
بالإضافة إلى تحسينات الدقة، توفر أنظمة SBAS أيضًا مراقبة النزاهة، مما يساعد على تحديد إشارات الأقمار الصناعية غير الموثوقة. هذا أمر قيم للتطبيقات الحرجة من حيث السلامة، حيث تكون معرفة متى لا يجب الوثوق ببيانات الموقع بنفس أهمية امتلاك بيانات دقيقة.
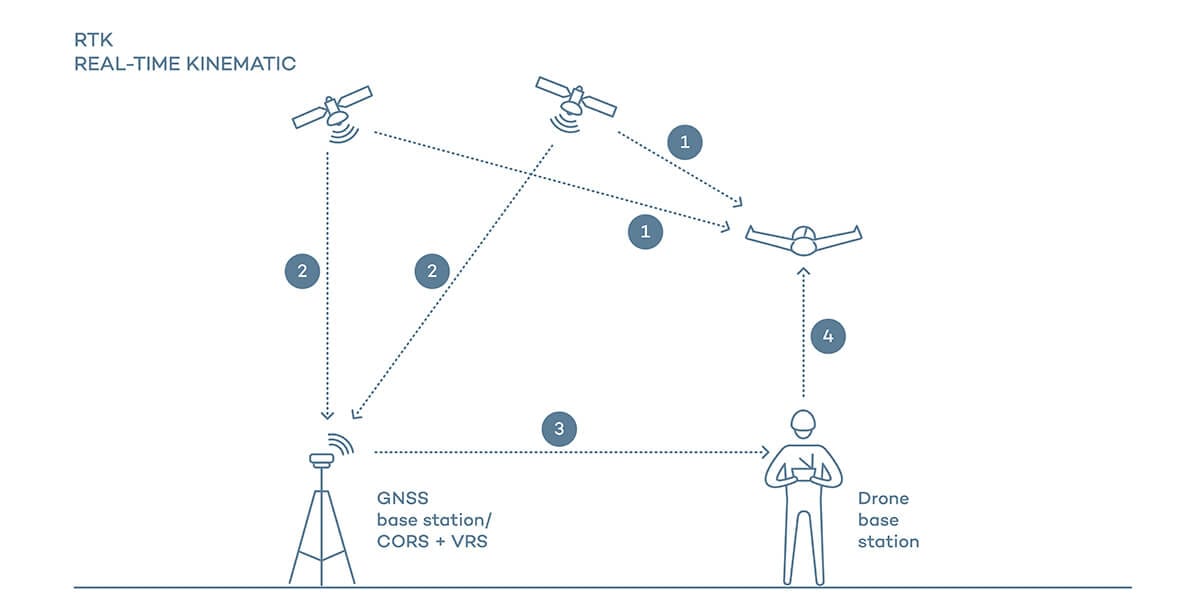
RTK (الحركية في الوقت الحقيقي)
بالنسبة لطائراتي المستخدمة في رسم الخرائط والمسح، كانت تقنية RTK تحويلية:
المبدأ الأساسي: قياسات الطور الحامل للحصول على دقة سنتيمترية
المكونات:
- محطة القاعدة: مرجع موقع ثابت
- الروفر: جهاز استقبال متحرك على الطائرة
- رابط التصحيح: اتصال راديو أو شبكة
الدقة: عادة 1-3 سم في الظروف المثالية
يتطلب إعداد RTK المزيد من المكونات والتعقيد، ولكن النتائج تستحق ذلك للتطبيقات الدقيقة. أستخدم اتصال 4G/LTE لاستقبال تصحيحات NTRIP من الخدمات العامة، مما يلغي الحاجة إلى محطة قاعدة محلية.
القيود الرئيسية التي واجهتها مع RTK هي:
- تتطلب رؤية واضحة للسماء
- محطة قاعدة ضمن ~10 كم (رغم أن شبكة RTK تمد هذا النطاق)
- رابط بيانات تصحيح موثوق
- فترة تهيئة مطلوبة
بالنسبة لمعظم الطيران الترفيهي، تعتبر تقنية RTK مبالغًا فيها. ولكن للخرائط والمسح والزراعة الدقيقة والهبوط الآلي، فهي لا تقدر بثمن. تفتح القدرة على العودة بشكل متكرر إلى نفس الموقع بالضبط بدقة سنتيمترية العديد من التطبيقات المهنية.
PPP (تحديد الموقع النقطي الدقيق)
لبعض رحلات الاستكشاف البعيدة التي أقوم بها حيث لا تكون تقنية RTK عملية:
• المبدأ الأساسي: يستخدم بيانات دقيقة لمدار الأقمار الصناعية والساعة
• الميزة: لا تتطلب محطة قاعدة
• العيب: وقت تقارب أطول (من دقائق إلى ساعات)
• الدقة: مستوى الديسيمتر (10-30 سم)
تقنية PPP أقل شيوعًا في تطبيقات الطائرات بدون طيار بسبب متطلبات وقت التقارب، ولكنها تقنية قيمة لبعض التطبيقات المتخصصة. لقد استخدمتها لمهام رسم الخرائط طويلة المدة حيث يكون لدى الطائرة بدون طيار وقت لتحقيق التقارب قبل بدء نمط رسم الخرائط.
استقبال متعدد النطاقات
تستخدم الوحدات الحديثة عالية المستوى مثل ZED-F9P نطاقات ترددية متعددة:
• أحادي التردد: معظم أنظمة GNSS للطائرات بدون طيار (L1/E1/B1)
• ثنائي التردد: وحدات عالية المستوى (L1+L5/E5/B2)
• المزايا:
- تخفيف أفضل للمسارات المتعددة
- تهيئة RTK أسرع
- دقة محسنة
- أداء أفضل في البيئات الصعبة
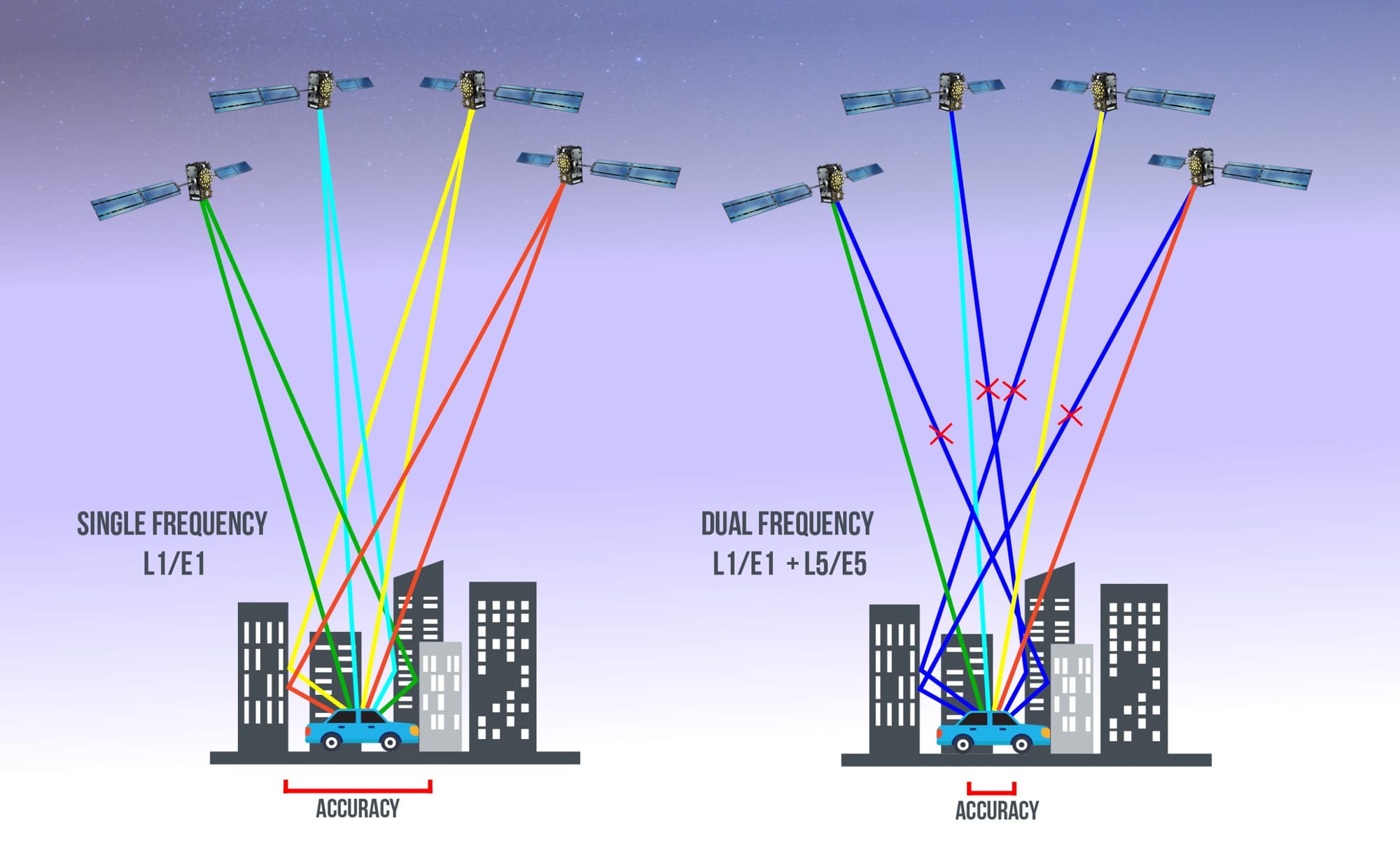
الفرق ملحوظ - طائرة المسح المزودة بـ F9P تحقق إصلاح RTK بشكل أسرع بكثير من أنظمة RTK أحادية التردد القديمة التي استخدمتها. تخفيف المسارات المتعددة قيّم بشكل خاص في البيئات ذات الأسطح العاكسة مثل الماء أو المباني.
استكشاف مشاكل GNSS وإصلاحها
على مر السنين، واجهت وحللت مشاكل لا حصر لها في نظام GNSS. فيما يلي المشاكل الأكثر شيوعًا وحلولها:
استقبال ضعيف للأقمار الصناعية
الأعراض:
- اكتساب عدد قليل من الأقمار الصناعية
- قيم HDOP عالية
- بيانات موقع غير متسقة
- فقدان GNSS المتكرر
الحلول:
- تحسين موضع الهوائي - لقد شهدت تحسينات كبيرة بمجرد نقل الهوائي بضعة سنتيمترات بعيدًا عن مصادر التداخل.
- الابتعاد عن مصادر التداخل - خاصة أجهزة إرسال الفيديو وأسلاك الطاقة.
- استخدام وحدة متعددة الكوكبات - المزيد من الأقمار الصناعية يعني المزيد من الفرص للاستقبال الجيد.
- التحقق من العوائق المادية - ألياف الكربون مشكلة بشكل خاص.
- التحقق من اتصال الهوائي - الاتصالات غير المحكمة يمكن أن تسبب مشاكل متقطعة.
قضيت ذات مرة ساعات في استكشاف مشكلة الاستقبال الضعيف في بناء جديد، فقط لاكتشاف أن لوحة ألياف الكربون العلوية كانت تحجب الإشارات. أدت إضافة فاصل بطول 15 ملم لرفع الوحدة إلى حل المشكلة على الفور.
اكتساب بطيء للأقمار الصناعية
الأعراض:
- وقت طويل للإصلاح الأول
- تأخر قفل GPS قبل الطيران
الحلول:
- التحديث إلى وحدة أحدث - كل جيل لديه أوقات اكتساب محسنة.
- تمكين جميع الكوكبات المتاحة - المزيد من الأقمار الصناعية يعني اكتسابًا أسرع.
- ضبط نموذج ديناميكي مناسب - استخدام وضع "المشاة" للطائرة بدون طيار يمكن أن يبطئ الاكتساب.
- ضمان استقرار جهد البطارية - انخفاض الجهد يمكن أن يعيد تعيين عملية الاكتساب.
- النظر في هوائي خارجي للبيئات الصعبة - في بعض الأحيان لا يكون الهوائي المدمج كافيًا.
وجدت أن الحفاظ على تشغيل جهاز الاستقبال بين الرحلات (باستخدام بطارية صغيرة) يمكن أن يقلل بشكل كبير من وقت الاكتساب من خلال الحفاظ على بيانات المدار.
انجراف الموقع
الأعراض:
- تحرك موضع الثبات تدريجيًا
- RTH يهبط بعيدًا عن نقطة الإقلاع
- عدم اتباع نقاط الطريق بدقة
الحلول:
- انتظر تغطية أفضل للأقمار الصناعية (HDOP أقل) - أنا دائمًا أنتظر حتى يكون HDOP أقل من 2.0 قبل الوثوق ببيانات الموقع.
- زيادة الحد الأدنى لمتطلبات الأقمار الصناعية - المزيد من الأقمار الصناعية يعني عمومًا دقة أفضل.
- تمكين SBAS إذا كان متاحًا - يمكن للتصحيحات أن تقلل بشكل كبير من الانحراف.
- التحقق من التداخل المغناطيسي الذي يؤثر على البوصلة - غالبًا ما تتنكر مشكلات البوصلة في صورة مشاكل GNSS.
- مراعاة العوامل البيئية (الأشجار، المباني) - يمكن أن تسبب انعكاسات المسار المتعدد أخطاء في تحديد الموقع.
في إحدى مهمات رسم الخرائط، لاحظت أن الطائرة بدون طيار تنحرف تدريجيًا عن المسار. اتضح أن المشكلة كانت بسبب بوصلة تمت معايرتها بشكل سيء وتأثرت بالمحركات. أدت إعادة معايرة البوصلة بعيدًا عن أي أجسام معدنية إلى حل المشكلة.
أعطال GNSS
الأعراض:
- قفزات مفاجئة في الموقع
- سلوك ملاحة غير منتظم
- فقدان مؤقت للموقع
الحلول:
- ضبط معلمات تصفية GNSS - معظم البرامج الثابتة لديها إعدادات لتنعيم بيانات GNSS.
- زيادة تنعيم الملاحة - يمكن أن يؤدي ذلك إلى تصفية الأعطال اللحظية.
- تحقق من التداخل الكهربائي المتقطع - مصادر الطاقة المتحولة هي الجناة الشائعة.
- التحديث إلى أحدث البرامج الثابتة - تتم معالجة العديد من مشكلات GNSS في تحديثات البرامج الثابتة.
- التفكير في ترقية الأجهزة إلى الجيل الأحدث - أجهزة الاستقبال الأحدث لديها قدرة أفضل على رفض الإشارات الزائفة.
لقد وجدت أن إضافة مكثف إلى مدخل الطاقة لوحدة GNSS يمكن أن يساعد في تقليل الأعطال الناجمة عن الضوضاء الكهربائية من نظام الطاقة.
أدوات التشخيص
U-Center (برنامج تكوين Ublox)
هذه هي أداتي المفضلة لتشخيص مشكلات GNSS:
• الغرض: تكوين ومراقبة أجهزة استقبال Ublox GNSS
• الميزات:
- تتبع الأقمار الصناعية في الوقت الفعلي
- مراقبة جودة الإشارة
- ضبط معلمات التكوين
- تحديثات البرامج الثابتة
- تحليل الأداء
أقوم بالاتصال عبر USB أو UART من وحدة التحكم في الطيران. تعد ميزة عرض قوة إشارة الأقمار الصناعية مفيدة بشكل خاص لتحديد مشكلات التداخل - سترى جميع الأقمار الصناعية ذات قوة الإشارة المنخفضة وليس فقط بعضها.
https://www.u-blox.com/en/product/u-center-ar
عارضات GNSS
مدمجة في معظم برامج وحدة التحكم في الطيران:
• الغرض: تصور أداء GNSS
• أمثلة:
- حالة GPS في Mission Planner
- شاشة إعداد GPS في INAV
- علامة تبويب GPS في Betaflight
أتحقق دائمًا من هذه قبل الرحلات للتأكد من الاستقبال الجيد. المقاييس الرئيسية التي أراقبها هي:
- عدد الأقمار الصناعية (الأكثر أفضل، أفضل رؤية 14+ للمهام الحرجة)
- قيمة HDOP (الأقل أفضل، أهدف لـ < 1.5)
- نوع الإصلاح (3D مطلوب للملاحة، RTK float/fixed للتطبيقات الدقيقة)
- قوة الإشارة (تشير إلى جودة الاستقبال والتداخل المحتمل)
تحليل الصندوق الأسود
لتشخيص ما بعد الطيران:
• الغرض: مراجعة أداء GNSS أثناء الطيران
• الأدوات:
- Blackbox Explorer
- Flight Review (ArduPilot)
لقد حددت العديد من المشكلات الدقيقة من خلال تحليل الصندوق الأسود والتي لم تكن واضحة أثناء الطيران. تشمل البيانات الرئيسية التي يجب فحصها:
- دقة الموقع بمرور الوقت
- انحراف نقطة المنزل
- أداء الملاحة
- جودة إشارة GNSS
يمكن أن تكشف مقارنة بيانات GNSS مع أجهزة الاستشعار الأخرى (مثل مقياس التسارع) عن مشكلات التكامل التي تؤثر على أداء الملاحة.
الاتجاهات المستقبلية في تكنولوجيا GNSS
بناءً على تجربتي مع أحدث الوحدات وتطورات الصناعة، إليك ما أراه في اتجاه تكنولوجيا GNSS:
تطورات الأجهزة
• معيار متعدد النطاقات: أصبح التردد المزدوج أكثر شيوعًا في الأجهزة الاستهلاكية. أتوقع أن يصل هذا إلى الطائرات بدون طيار الهواة في غضون 2-3 سنوات، مما يوفر دقة وموثوقية أفضل.
• التصغير: وحدات أصغر وأخف وزنًا مع أداء أفضل. سيستمر اتجاه التكامل، مع GNSS والبوصلة ومقياس الضغط الجوي وحتى IMU في حزم واحدة.
• التكامل: الجمع بين GNSS والبوصلة ومقياس الضغط الجوي والراديو. أنا أرى هذا بالفعل في بعض الوحدات المتطورة، وهذا يبسط الأسلاك ويقلل الوزن.
• كفاءة الطاقة: عمر بطارية ممتد للمهام بعيدة المدى. وضع Super-E في M10 هو مجرد البداية - من المرجح أن تقلل الوحدات المستقبلية من استهلاك الطاقة بشكل أكبر.
• تكنولوجيا الهوائي: استقبال محسّن في عبوات أصغر. يستمر تصميم الهوائي في التقدم، مع أداء أفضل من عوامل شكل أصغر.
ابتكارات البرمجيات
• خوارزميات محسنة: تقدير وتصفية أفضل للموقع. بدأت مناهج التعلم الآلي تظهر في الأنظمة التجارية وستصل في النهاية إلى الطائرات بدون طيار الهواة.
• تحديد المواقع المعزز بالذكاء الاصطناعي: التعلم الآلي للبيئات الصعبة. لقد رأيت أبحاثًا أولية تستخدم الشبكات العصبية لتحسين تحديد المواقع في الوديان الحضرية.
• دمج أجهزة الاستشعار: تكامل أكثر إحكامًا مع أجهزة استشعار الملاحة الأخرى. ستستمر الحدود بين GNSS وتحديد المواقع المرئي والملاحة بالقصور الذاتي في التلاشي.
• مراقبة السلامة: اكتشاف أفضل للإشارات غير الموثوقة. مع زيادة استقلالية الطائرات بدون طيار، تصبح معرفة متى لا يجب الوثوق ببيانات GNSS أكثر أهمية.
• إعداد مبسط: تكوين أكثر بديهية. كان تعقيد إعداد GNSS حاجزًا للعديد من المستخدمين، لكن الأنظمة الأحدث أصبحت أكثر سهولة في التوصيل والتشغيل.
التقنيات الناشئة
• الملاحة عبر الأقمار الصناعية LEO: كوكبات المدار الأرضي المنخفض لتحسين الدقة. يمكن أن توفر أنظمة مثل Starlink خدمات ملاحة ذات أداء حضري أفضل من GNSS التقليدي.
• الملاحة المساعدة بالرؤية: الكاميرات تعزز GNSS في البيئات الصعبة. أنا أستخدم هذا بالفعل في بعض البنايات، حيث تكمل أجهزة استشعار التدفق البصري GNSS لتحديد مواقع أكثر قوة.
• أجهزة استشعار الكم: تكنولوجيا تحديد المواقع من الجيل التالي. لا تزال في مختبرات الأبحاث، لكن أجهزة استشعار الكم تعد بتحسينات كبيرة في الدقة دون مراجع خارجية.
• المصادقة المتقدمة: الحماية ضد هجمات التزييف. مع زيادة شيوع تزييف GNSS، ستصبح ميزات المصادقة أكثر أهمية للتطبيقات الحرجة.
• تحديد المواقع الشبكي: الطائرات بدون طيار تشارك بيانات الموقع في أسراب. لقد جربت هذا في إعدادات متعددة الطائرات بدون طيار، حيث يمكن للطائرات استخدام تحديد المواقع النسبي لتعزيز تقديرات موقعها المطلق.
الأسئلة الشائعة: أسئلة شائعة حول تكنولوجيا GNSS للطائرات بدون طيار
ما الفرق بين GPS و GNSS و GLONASS؟
هذا أحد الأسئلة الأكثر شيوعًا التي أتلقاها عند مساعدة الناس في بناء طائراتهم:
• GPS (نظام تحديد المواقع العالمي): نظام الملاحة بالأقمار الصناعية الأمريكي الذي تديره قوة الفضاء الأمريكية. إنه النظام الأصلي والأكثر استخدامًا على نطاق واسع.
• GNSS (النظام العالمي للملاحة بالأقمار الصناعية): المصطلح الشامل لجميع أنظمة الملاحة بالأقمار الصناعية، بما في ذلك GPS و GLONASS و Galileo و BeiDou والأنظمة الإقليمية. تستخدم أجهزة الاستقبال الحديثة عادة كوكبات GNSS متعددة في وقت واحد.
• GLONASS: نظام الملاحة الروسي عبر الأقمار الصناعية، مشابه لنظام GPS ولكن بخصائص مدارية وبنية إشارة مختلفة. إنه ثاني أقدم نظام عالمي ويوفر تغطية جيدة في خطوط العرض العالية.
عندما يشير شخص ما إلى "وحدة GPS" للطائرة بدون طيار، فإنه يتحدث عادةً عن مستقبل GNSS يمكنه استخدام أنظمة أقمار صناعية متعددة، وليس فقط نظام GPS الأمريكي. أنا دائماً أوضح هذا عند مساعدة المبتدئين لتجنب الارتباك.
هل يستحق الترقية إلى وحدة GNSS من الجيل الأحدث؟
بناءً على تجربتي في ترقية العديد من الطائرات بدون طيار:
• M6/M7 إلى M8: تحسن كبير في وقت الاستقبال، ودعم الأنظمة، والدقة. بالتأكيد تستحق الترقية.
• M8 إلى M9: تحسينات ملحوظة في الدقة، ومعدل التحديث، وأداء الأنظمة المتعددة. تستحق الترقية للاستخدام الملاحي الجاد.
• M9 إلى M10: تحسينات تدريجية في الحساسية، واستهلاك الطاقة، والأداء في المناطق الحضرية. تستحق النظر للتطبيقات المتخصصة أو إذا كانت كفاءة الطاقة أمرًا حيويًا.
بالنسبة لمعظم الطيارين الهواة، لا تزال وحدة M8N كافية للملاحة الأساسية، بينما توفر M9N أداءً ممتازًا للتطبيقات الأكثر تطلبًا. سلسلة M10 أو F9P مفيدة بشكل أساسي للاستخدامات المهنية أو المتخصصة.
قمت بترقية طائرتي بدون طيار للاستكشاف بعيد المدى من M8N إلى M9N ولاحظت تحسينات فورية في وقت الاستقبال واستقرار الموقع. بالنسبة لطائراتي الحرة التي تستخدم GPS فقط للعودة إلى المنزل، احتفظت بوحدات M8N لأنها مناسبة تمامًا لهذا الغرض.
كم عدد الأقمار الصناعية التي أحتاجها للملاحة الموثوقة؟
من تجربتي مع عشرات الطائرات بدون طيار المزودة بـ GNSS:
• الحد الأدنى الوظيفي: 5-6 أقمار صناعية
• الحد الأدنى الموصى به: 8 أقمار صناعية
• أداء جيد: 10-14 قمرًا صناعيًا
• أداء ممتاز: 15+ قمرًا صناعيًا
ومع ذلك، فإن عدد الأقمار الصناعية هو جزء واحد فقط من المعادلة. HDOP (التخفيف الأفقي للدقة) مهم بنفس القدر - تشير قيمة HDOP المنخفضة (يفضل أن تكون أقل من 2.0) إلى هندسة أقمار صناعية أفضل وتحديد مواقع أكثر دقة.
لقد واجهت حالات بها أكثر من 20 قمراً صناعياً ولكن مع HDOP ضعيف بسبب تجمع جميع الأقمار الصناعية في جزء واحد من السماء، مما أدى إلى تحديد مواقع متوسط الجودة. وعلى العكس من ذلك، كان لدي أداء ممتاز مع 9 أقمار صناعية فقط موزعة جيدًا عبر السماء، مما أعطى HDOP منخفضًا.
يمكن لأجهزة الاستقبال الحديثة متعددة الأنظمة غالبًا رؤية أكثر من 20 قمرًا صناعيًا في ظروف السماء المفتوحة، مما يوفر احتياطيًا ودقة ممتازين.
هل يستنزف استخدام أنظمة متعددة البطارية بشكل أسرع؟
سؤال أتلقاه غالبًا من الطيارين المهتمين بوقت الطيران:
يزيد استخدام أنظمة GNSS المتعددة من استهلاك الطاقة قليلاً، لكن التأثير صغير نسبيًا:
• GPS فقط: استهلاك الطاقة الأساسي
• GPS+GLONASS: ~10-15% طاقة أكثر من GPS فقط
• GPS+GLONASS+Galileo+BeiDou: ~20-30% طاقة أكثر من GPS فقط
للسياق، تستهلك وحدة M8N النموذجية حوالي 25 مللي أمبير، بينما قد يستهلك التكوين الكامل متعدد الأنظمة 30-35 مللي أمبير. على طائرة بدون طيار تستهلك تيارًا قدره 5-20 أمبير أثناء الطيران، هذا الفرق ضئيل (أقل من 0.5% من إجمالي استهلاك الطاقة).
لقد قست الفرق على طائراتي بعيدة المدى، وكان التأثير على وقت الطيران غير ملحوظ. فوائد الدقة المحسنة، وسرعة الاستقبال، والموثوقية الأفضل تفوق دائمًا تأثير الطاقة الضئيل.
أي نظام GNSS هو الأكثر دقة؟
بناءً على اختباراتي عبر مناطق مختلفة:
• GPS: عمومًا دقة 3-5 متر، متسق وموثوق جدًا
• GLONASS: عادة دقة 4-7 متر، أفضل عند خطوط العرض العالية
• Galileo: دقة 1-3 متر، مصمم للدقة المدنية
• BeiDou: 3-5 متر عالميًا، 2-3 متر في منطقة آسيا والمحيط الهادئ
ومع ذلك، يأتي أفضل أداء من استخدام أنظمة متعددة معًا، حيث تكمل بعضها البعض في نقاط القوة والضعف. عادة ما يحقق جهاز استقبال حديث يستخدم جميع الأنظمة المتاحة دقة 1-3 متر في الظروف الجيدة، أفضل من أي نظام واحد بمفرده.
من تجربتي، يقدم Galileo حاليًا أفضل دقة مدنية من الأنظمة العالمية، لكن ميزته أكثر وضوحًا عند دمجه مع أنظمة أخرى.
هل يمكنني استخدام RTK على طائرة بدون طيار عادية؟
نعم، يمكن تنفيذ RTK على الطائرات بدون طيار العادية مع بعض الاعتبارات:
المتطلبات:
- وحدة GNSS قادرة على RTK (مثل ZED-F9P)
- وحدة تحكم طيران تدعم RTK (ArduPilot، INAV مع بعض القيود)
- محطة قاعدة أو خدمة NTRIP للتصحيحات
- رابط بيانات لنقل التصحيح (راديو قياس عن بعد، 4G/LTE)
اعتبارات عملية:
- تكلفة إضافية (150-300 دولار لأجهزة RTK)
- زيادة التعقيد في الإعداد
- الحاجة إلى مصدر بيانات تصحيح
- فائدة محدودة للطيران FPV القياسي
لقد نفذت RTK على العديد من الطائرات، وفي حين أن الدقة على مستوى السنتيمتر مثيرة للإعجاب، فهي عمومًا غير ضرورية للطيران الترفيهي أو السباقات أو الطيران الحر. حيث يكون RTK منطقيًا هو في تطبيقات رسم الخرائط، والمسح، والزراعة الدقيقة، والهبوط الآلي.
بالنسبة لطائرة المسح الخاصة بي، أستخدم وحدة ZED-F9P مع اتصال 4G لتلقي تصحيحات NTRIP من خدمة عامة. كان الإعداد أكثر تعقيدًا من تنفيذ GNSS القياسي، لكن النتائج تستحق ذلك للتطبيقات المهنية.
كيف تؤثر العوامل البيئية على أداء GNSS؟
يمكن للعوامل البيئية المختلفة أن تؤثر بشكل كبير على استقبال GNSS:
• الوديان الحضرية: المباني تحجب وتعكس الإشارات، مما يقلل الدقة بمقدار 5-10 أضعاف. لقد رأيت أخطاء في تحديد المواقع تزيد عن 20 مترًا في البيئات الحضرية الكثيفة مع أجهزة استقبال ذات نظام واحد.
• الأوراق الكثيفة: يمكن للأشجار أن تضعف الإشارات بمقدار 10-30 ديسيبل، مما يقلل من رؤية الأقمار الصناعية. وجدت أن الطيران فوق مظلة الأشجار غالبًا ما يكون ضروريًا للملاحة الموثوقة في المناطق المشجرة.
• المسطحات المائية: يمكن أن تسبب الانعكاسات أخطاء في المسار المتعدد. عند رسم خرائط الخطوط الساحلية، لاحظت قفزات في المواقع بالقرب من حافة الماء بسبب انعكاسات الإشارة.
• الطقس: يمكن للأمطار الغزيرة أن تخفض جودة الإشارات قليلاً (توهين 1-2 ديسيبل). من تجربتي، نادرًا ما يسبب هذا مشاكل أداء ملحوظة.
• ظروف الغلاف الأيوني: يمكن للنشاط الشمسي أن يؤثر على الدقة. أثناء العواصف الشمسية، لاحظت انخفاضًا طفيفًا في الأداء، على الرغم من أن أجهزة الاستقبال الحديثة تتعامل مع ذلك بشكل جيد.
• مصادر التشويش: يمكن للتداخل RF القريب أن يمنع الاستقبال. مرة رفضت إحدى الطائرات بدون طيار تثبيت الموقع حتى أدركت أن نظام الميكروفون اللاسلكي الخاص بي كان يسبب تداخلاً.
تساعد أجهزة الاستقبال متعددة الأنظمة في التخفيف من هذه المشكلات من خلال توفير المزيد من الأقمار الصناعية والترددات للعمل معها، ولكن لا يوجد نظام GNSS محصن تمامًا ضد التحديات البيئية. بالنسبة للتطبيقات الحيوية في البيئات الصعبة، أضع دائمًا في اعتباري تقنيات ملاحية تكميلية مثل التدفق البصري أو تحديد المواقع المرئي.
الخلاصة
لقد تطورت تقنية GNSS بشكل كبير من أصولها العسكرية لتصبح مكونًا أساسيًا في أنظمة الطائرات بدون طيار الحديثة. أدى الانتقال من أجهزة استقبال GPS أحادية الكوكبة إلى أجهزة استقبال GNSS متعددة الكوكبات إلى تحسين أداء الملاحة وموثوقيتها وقدراتها بشكل كبير.
إن فهم الاختلافات بين GPS وGLONASS وGalileo وBeiDou - بالإضافة إلى تطور تقنية أجهزة الاستقبال من الوحدات المبكرة إلى أحدث أجيال M10 وF9P - يتيح لطياري الطائرات بدون طيار اتخاذ قرارات مستنيرة بشأن أنظمة الملاحة لديهم. سواء كنت تطير للترفيه أو السباق أو الطيران الحر أو التطبيقات المهنية، فإن اختيار تقنية GNSS المناسبة وتنفيذها بشكل صحيح يمكن أن يعزز قدرات طائرتك بدون طيار وسلامتها.
مع استمرار تقدم تقنية GNSS مع استقبال متعدد النطاقات، وخوارزميات محسنة، وتكامل مع أجهزة الاستشعار الأخرى، يمكننا توقع أداء أفضل في البيئات الصعبة وتحديد مواقع أكثر دقة للتطبيقات المتخصصة. من خلال البقاء على اطلاع بهذه التطورات وفهم كيفية تحسين الإعداد الحالي، يمكنك التأكد من أن نظام الملاحة في طائرتك بدون طيار يعمل بأفضل حالاته.


