GNSS Technology: A Comprehensive Guide to Safe Navigation
While "GPS" is often used as a generic term for satellite navigation in drones, modern navigation systems actually leverage multiple satellite constellations collectively known as GNSS (Global Navigation Satellite Systems). After years of building and flying drones with various navigation systems, I've seen firsthand how proper GNSS implementation can make the difference between a drone that reliably returns home and one that becomes an expensive tree ornament. This comprehensive guide explores the different satellite navigation systems, their characteristics, the evolution of GNSS receiver modules, and how these technologies enhance drone navigation capabilities.
Introduction to GNSS Technology
GNSS (Global Navigation Satellite System) refers to the constellation of satellites providing signals from space that transmit positioning and timing data to GNSS receivers. These receivers then use this data to determine location. While GPS is the most well-known GNSS, several other systems exist and modern receivers often use multiple systems simultaneously for improved performance.

I still remember my first GPS-equipped drone back in 2020. It used a primitive Ublox LEA-6H module that took nearly two minutes to get a position lock and would drift several meters during a hover. Fast forward to today, and I'm flying with multi-constellation receivers that lock in seconds and maintain position with remarkable precision. The evolution has been nothing short of revolutionary for drone capabilities.
The Evolution of Satellite Navigation
Satellite navigation has evolved dramatically since its inception:
• Military Origins (1970s-1980s): GPS developed by the US Department of Defense for military applications. The technology was strictly controlled and limited in civilian applications.
• Civilian Access (1990s): The Selective Availability policy made GPS deliberately less accurate for civilian use. Early GPS units having errors of 100+ meters!
• Full Civilian Access (2000s): The removal of Selective Availability enabled precise civilian applications. This was a game-changer that opened the door for reliable drone navigation.
• Multi-Constellation Era (2010s): The development and deployment of alternative systems like GLONASS, Galileo, and BeiDou created redundancy and improved performance. I noticed a significant improvement in my drones' navigation reliability when I upgraded from GPS-only to GPS+GLONASS modules around 2022.
• Modern Integration (Present): Multi-constellation receivers have become standard in consumer devices. Today, even budget drones can access 30+ satellites simultaneously for centimeter-level positioning.
Basic Principles of Satellite Navigation
All GNSS systems operate on similar principles, though understanding these fundamentals has helped me troubleshoot countless navigation issues over the years:
- Satellite Constellation: A network of satellites orbiting Earth broadcasts precise time and position signals. The more satellites your receiver can "see," the better your position accuracy.
- Signal Transmission: These satellites broadcast precise time and position information on specific radio frequencies. The signals are incredibly weak by the time they reach Earth – about the same power as a 50-watt light bulb viewed from 12,000 miles away!
- Trilateration: Your drone's receiver calculates position by measuring time delays from multiple satellites. I like to explain this as the receiver asking, "How far am I from satellite A? How far from satellite B?" and so on, then determining the only possible position that satisfies all those distances.
- Minimum Requirements: You need at least 4 satellites for 3D positioning (latitude, longitude, altitude). I've learned through experience that while 4 satellites will work, you really want 8+ for reliable drone navigation.
- Error Correction: Various techniques improve accuracy by accounting for atmospheric delays, clock errors, and other factors. Modern receivers are remarkably good at this, which is why today's drones can hold position so precisely.
Key Performance Metrics
Several factors determine GNSS performance, and understanding these has helped me choose the right modules for different applications:
• Accuracy: How close the measured position is to the true position. For standard drone navigation, 2-3 meter accuracy is usually sufficient, but for mapping or precision applications, you might need centimeter-level accuracy.
• Availability: The percentage of time the service is usable. I've found that multi-constellation receivers dramatically improve this metric, especially in challenging environments like urban areas or under partial tree cover.
• Continuity: The ability to function without interruption. This is critical for autonomous missions – a momentary GNSS dropout during a long-range flight can be disastrous.
• Integrity: Trust that the system is providing correct information. Modern receivers have sophisticated algorithms to detect and reject erroneous measurements.
• Time to First Fix (TTFF): How quickly a position can be established. I remember the days of waiting several minutes with lower end receivers for a GPS lock before takeoff – now it's typically seconds with modern modules.
• Update Rate: How frequently the position is updated. For racing or dynamic flying, higher update rates (10Hz+) provide noticeably smoother navigation.
Major GNSS Constellations
Over the years, I've used receivers that support various combinations of these systems, and each has its strengths and weaknesses. Understanding their differences has helped me optimize my drones for different flying conditions.
GPS (Global Positioning System)
The original and most widely used satellite navigation system:
• Country/Region: United States
• Initial Operation: 1978 (limited), Full Operational Capability in 1995
• Satellites: 31 operational satellites (24 required for global coverage)
• Orbital Characteristics:
- Medium Earth Orbit at approximately 20,200 km
- 6 orbital planes with 4+ satellites each
- 12-hour orbital period
• Signal Frequencies:
- L1 (1575.42 MHz) - Primary civilian frequency
- L2 (1227.60 MHz) - Used for military and advanced civilian applications
- L5 (1176.45 MHz) - Newest frequency for safety-of-life applications
• Accuracy:
- Standard Positioning Service (SPS): ~3-5 meters
- Precise Positioning Service (PPS): ~<1 meter (military)
GPS has been the backbone of drone navigation for years, and I still consider it the most reliable system overall. I've flown in remote areas worldwide, and GPS coverage has rarely let me down. The system's maturity and continuous modernization program make it a dependable choice for most applications.
One limitation of GPS is that its performance can degrade in high latitudes (near the poles) due to the satellite orbit configuration. The signals can also be affected by urban canyons and dense foliage, which is why having access to multiple constellations is so valuable.
GLONASS (GLObal NAvigation Satellite System)
Russia's alternative to GPS has become an important complement in modern receivers:
• Country/Region: Russia
• Initial Operation: 1982 (limited), Full Operational Capability restored in 2011
• Satellites: 24 operational satellites
• Orbital Characteristics:
- Medium Earth Orbit at approximately 19,100 km
- 3 orbital planes with 8 satellites each
- 11-hour 15-minute orbital period
• Signal Frequencies:
- L1 (1598.0625 - 1605.375 MHz)
- L2 (1242.9375 - 1248.625 MHz)
- L3 (1202.025 MHz)
• Accuracy:
- Standard Precision: ~4-7 meters
- High Precision: ~<1 meter (military)
I first added GLONASS capability to my drones around 2022, and the improvement was immediately noticeable. The system performs particularly well at high latitudes – I've flown in northern Norway where GLONASS satellites were often more numerous than GPS in my receiver's view.
GLONASS complements GPS extremely well in combined receivers. While historically less stable than GPS (there was a period in the 1990s when the system nearly collapsed), modern GLONASS is very reliable. I've found that having both systems active provides excellent redundancy – if one system has issues, the other keeps your drone safely navigating.
Galileo
The European Union's civilian-controlled GNSS is the newest major player, and I've been impressed with its performance:
• Country/Region: European Union
• Initial Operation: 2016 (initial services), Full Operational Capability expected by 2026
• Satellites: 28 planned (24 operational + 4 spares), 26 currently in orbit
• Orbital Characteristics:
- Medium Earth Orbit at approximately 23,222 km
- 3 orbital planes with 8-10 satellites each
- 14-hour orbital period
• Signal Frequencies:
- E1 (1575.42 MHz) - Same as GPS L1
- E5a (1176.45 MHz) - Same as GPS L5
- E5b (1207.14 MHz)
- E6 (1278.75 MHz)
• Accuracy:
- Open Service: ~1-3 meters
- High Accuracy Service: ~20 cm
- Public Regulated Service: Encrypted for government use
When I first enabled Galileo on my drones around 2022, I was skeptical about whether it would make a noticeable difference. To my surprise, it did – particularly in urban environments where buildings can block some satellite signals. Having those additional Galileo satellites in view provided more consistent navigation performance.
Galileo was designed specifically for civilian applications, with higher accuracy than standard GPS. I appreciate its advanced integrity monitoring, which helps detect and mitigate unreliable signals. The system is also fully interoperable with GPS, making integration seamless in modern receivers.
While Galileo isn't yet at full operational capability, it's already providing excellent service. The only limitation I've encountered is that some older receivers don't support it, but any modern GNSS module will take full advantage of these satellites.
BeiDou (BDS)
China's satellite navigation system has rapidly evolved to become a global player:
• Country/Region: China
• Initial Operation: BeiDou-1 (2000), BeiDou-2 (2012), BeiDou-3 (2020)
• Satellites: 35 operational satellites
• Orbital Characteristics:
- Mix of Medium Earth Orbit (27 satellites at 21,500 km)
- Geostationary Earth Orbit (5 satellites)
- Inclined Geosynchronous Orbit (3 satellites)
• Signal Frequencies:
- B1I (1561.098 MHz)
- B1C (1575.42 MHz) - Same as GPS L1
- B2a (1176.45 MHz) - Same as GPS L5
- B2b (1207.14 MHz) - Same as Galileo E5b
- B3I (1268.52 MHz)
• Accuracy:
- Global Service: ~3-5 meters
- Regional Service: ~2-3 meters
I started using BeiDou-capable receivers around 2022, and the system has proven to be a valuable addition to the GNSS ecosystem. The unique aspect of BeiDou is its hybrid constellation design, with satellites in different orbit types. This provides enhanced coverage in the Asia-Pacific region, where I've noticed particularly strong performance.
One interesting feature of BeiDou that other systems lack is its messaging capability – the system can actually transmit short text messages, though this isn't typically used in drone applications. The full global service was completed in 2020, making BeiDou the newest complete global navigation system.
In my experience, BeiDou integration has been seamless in modern receivers, though documentation in English was limited in the early days. Today, it's a standard part of multi-constellation receivers and contributes significantly to overall navigation performance.
Regional Systems
In addition to the global systems, several regional GNSS systems exist that can provide additional benefits in specific areas:
QZSS (Quasi-Zenith Satellite System)
• Country/Region: Japan
• Coverage: Japan and Asia-Oceania region
• Satellites: 4 operational satellites
QZSS is designed to work in the urban canyons of Japan, with satellites in orbits that keep them at high elevations over Japan. I've seen people flying with QZSS-enabled receivers in Tokyo, and the improvement in urban performance was noticeable – position holds were more stable between tall buildings than with global constellations alone.
NavIC (Navigation with Indian Constellation)
• Country/Region: India
• Coverage: India and surrounding region (1,500 km)
• Satellites: 7 operational satellites
NavIC is optimized for the Indian subcontinent. While I haven't personally tested it extensively, colleagues who fly in India report good results when their receivers support this regional system in addition to the global constellations.
Multi-Constellation Benefits for Drones
Using multiple GNSS constellations simultaneously provides several advantages for drone operations. I've experienced these benefits firsthand as I've upgraded my navigation systems over the years.
Improved Satellite Availability
The most immediate benefit of multi-constellation receivers is simply having more satellites in view:
• More Visible Satellites: Combined constellations provide 30+ visible satellites in open sky conditions. I regularly see 20-25 satellites, compared to just 8-10 with GPS alone.
• Urban Canyon Performance: Better positioning in cities and obstructed areas. I've flown between buildings where GPS-only receivers would lose lock, but multi-constellation systems maintained stable navigation.
• Reduced Geometric Dilution of Precision (GDOP): More satellites means better geometry and more accurate positioning. This translates to more precise hovering and navigation.
• Practical Impact: I experience fewer GPS dropouts during flight, particularly in challenging environments. This has saved several of my drones from potential flyaways or crashes.
Enhanced Accuracy
Multiple constellations working together improve overall positioning accuracy:
• Error Averaging: Multiple systems help average out individual system errors. I've observed position hold improving from ±3 meters with GPS alone to sub-meter precision with multi-constellation receivers.
• Cross-Validation: Positions from different systems can validate each other, rejecting outliers. This has eliminated the occasional position "jumps" I used to see with single-constellation receivers.
• Improved Precision: Position calculations using more satellites are generally more precise. This is particularly noticeable in altitude hold, which tends to be the weakest dimension in GNSS positioning.
• Practical Impact: My drones now maintain more stable position hold and navigation, making autonomous missions more reliable and video footage smoother.
System Redundancy
Perhaps the most important benefit for critical drone operations is redundancy:
• Failure Protection: If one system experiences issues, others can compensate. I once flew through an area with GPS jamming (likely unintentional), but my drone continued navigating normally using GLONASS and Galileo.
• Jamming Resistance: Different frequencies make complete jamming more difficult. This is particularly important for professional operations where signal integrity is critical.
• Spoofing Detection: Discrepancies between systems can indicate spoofing attempts. While rare, GPS spoofing is a growing concern for sensitive drone operations.
• Practical Impact: I've found return-to-home and autonomous functions to be significantly more reliable with multi-constellation receivers. This provides peace of mind during long-range flights.
Faster Acquisition
Getting a position lock quickly is important for efficient field operations:
• Parallel Processing: Receivers can acquire signals from multiple systems simultaneously. This dramatically reduces the time spent waiting before takeoff.
• Reduced TTFF: Faster position establishment on startup. What used to take minutes now takes seconds.
• Cold Start Improvement: Particularly beneficial for cold starts when the receiver has no recent satellite data. I've seen cold start times drop from 60+ seconds to under 30 seconds with multi-constellation receivers.
• Practical Impact: Quicker GPS lock before takeoff means less time waiting and more time flying. This is especially valuable in professional settings where time is money.
GNSS Receiver Evolution for Drones
I've used nearly every generation of GNSS receiver in my drones, and the evolution has been remarkable. Each generation has brought significant improvements in performance, size, and capabilities.
Receiver Generations
Early Drone GPS (2010-2014)
My first GPS-equipped drones used modules like the Ublox LEA-6 and NEO-6. These were revolutionary at the time but primitive by today's standards:
• Characteristics:
- GPS-only reception
- Slower update rates (1-5Hz)
- Lower sensitivity
- Larger size
- Higher power consumption
• Performance:
- Accuracy: 5-10 meters
- TTFF: 45-60 seconds cold start
- Satellite Capacity: 12-16 channels
I remember the frustration of waiting for a GPS lock before every flight, often standing in an open field for several minutes. Position hold was approximate at best, with the drone drifting several meters in each direction. Return-to-home was a nerve-wracking experience – you never knew exactly where the drone would decide "home" was!
Mid-Generation GNSS (2015-2018)
At some point I upgraded to modules like the Ublox NEO-7 and NEO-M8N, which brought significant improvements:
• Characteristics:
- GPS + GLONASS reception
- Moderate update rates (5-10Hz)
- Improved sensitivity
- Smaller form factors
- Reduced power consumption
• Performance:
- Accuracy: 2-5 meters
- TTFF: 30-45 seconds cold start
- Satellite Capacity: 32-72 channels
The addition of GLONASS was a game-changer for reliability. I noticed immediately that my drones would maintain position lock in areas where they previously struggled. The M8N became the workhorse of drone navigation during this period – I still have several drones flying with these modules today.
Modern GNSS (2019-2022)
In 2022, I began upgrading my fleet to modules like the Ublox NEO-M9N and SAM-M8Q:
• Characteristics:
- Multi-constellation (GPS, GLONASS, Galileo, BeiDou)
- Faster update rates (10-18Hz)
- High sensitivity
- Compact designs
- Power-efficient operation
• Performance:
- Accuracy: 1-3 meters
- TTFF: 15-30 seconds cold start
- Satellite Capacity: 72-184 channels
The performance improvement was substantial. Position hold became rock-solid, and return-to-home accuracy improved to within a meter of the takeoff point. The ability to use all four major constellations simultaneously provided excellent redundancy and performance in challenging environments.
Latest Generation (2023-Present)
My newest builds use cutting-edge modules like the Ublox NEO-M10 and ZED-F9P (for RTK applications):
• Characteristics:
- Full multi-constellation, multi-frequency
- High update rates (up to 25Hz)
- Extremely high sensitivity
- Ultra-compact packages
- Very low power consumption
- RTK capability in high-end models
• Performance:
- Accuracy: 0.5-2 meters (standard), 1-3cm (RTK)
- TTFF: 5-15 seconds cold start
- Satellite Capacity: 184+ channels
These latest modules represent a quantum leap in performance. The M10 series offers exceptional sensitivity and power efficiency, while the F9P brings survey-grade RTK precision to consumer drones. I've been particularly impressed with their performance in challenging environments like urban areas and light forest canopy.
Detailed Look at Popular Drone GNSS Modules
Over the years, I've used most of the popular GNSS modules in various builds. Here's my assessment of their capabilities and ideal applications:
Ublox NEO-M8N
The workhorse of drone GNSS for many years, and still widely used:
• Constellations: GPS, GLONASS, Galileo, BeiDou (concurrent reception of up to 3)
• Channels: 72 tracking channels
• Update Rate: Up to 10Hz (typical 5Hz in drones)
• Sensitivity: -167dBm tracking
• Accuracy: 2.5m CEP (Circular Error Probable)
• Power Consumption: 23mA @ 3.3V
I've installed dozens of M8N modules in various drones, and they offer an excellent balance of performance and cost. The module supports concurrent reception of up to three constellations, though I typically run GPS+GLONASS for the best combination of performance and power efficiency.
One limitation I've discovered is that enabling all constellations simultaneously can sometimes cause tracking issues due to the channel limitations. For most applications, GPS+GLONASS or GPS+Galileo provides the best results.

The M8N is still a solid choice for general-purpose navigation, return-to-home, and position hold. Common implementations include the BN-180, BN-220, and many integrated FC modules.
Ublox NEO-M9N
The upgraded successor to the M8N, offering significant improvements:
• Constellations: GPS, GLONASS, Galileo, BeiDou (concurrent reception of all)
• Channels: 184 tracking channels
• Update Rate: Up to 25Hz (typical 10Hz in drones)
• Sensitivity: -167dBm tracking
• Accuracy: 1.5m CEP (Circular Error Probable)
• Power Consumption: 45mA @ 3.3V (acquisition), 34mA (tracking)
When I upgraded my main long-range drone from an M8N to an M9N, the difference was immediately noticeable. The M9N can track all constellations simultaneously without channel limitations, providing excellent redundancy and performance.
The higher update rate (10Hz vs. 5Hz) results in smoother navigation and more responsive position adjustments. I've found the M9N particularly valuable for precision navigation and waypoint missions, where the improved accuracy makes a noticeable difference.

One downside is the slightly higher power consumption, though it's still negligible in the context of overall drone power usage. Common implementations include the Matek M9N-5883 and HGLRC M9N.
Ublox NEO-M10S
The latest generation standard GNSS, pushing the boundaries of performance:
• Constellations: GPS, GLONASS, Galileo, BeiDou, QZSS, NavIC (concurrent reception of all)
• Channels: 184+ tracking channels
• Update Rate: Up to 25Hz
• Sensitivity: -170dBm tracking
• Accuracy: 1.0m CEP (Circular Error Probable)
• Power Consumption: 38mA @ 3.3V (full power), 12mA (power save)
I've recently begun testing the M10 series in my newest builds, and the improvements are subtle but meaningful. The standout feature is the exceptional power efficiency – the Super-E mode can reduce power consumption by up to 70% while maintaining performance.
The improved sensitivity (-170dBm vs. -167dBm) translates to better performance in challenging environments like urban canyons or under light tree cover. I've noticed more consistent satellite tracking in areas where previous generations would occasionally lose lock.

The M10 is ideal for long-range missions where power efficiency matters, and for flying in challenging environments. It's still relatively new to the drone market, but I expect it to become the new standard as availability improves.
Ublox ZED-F9P
The high-precision RTK-capable module for professional applications:
• Constellations: GPS, GLONASS, Galileo, BeiDou (concurrent reception of all)
• Channels: 184 tracking channels
• Update Rate: Up to 25Hz
• Sensitivity: -167dBm tracking
• Accuracy: 1.0m CEP standard, 1cm + 1ppm with RTK
• Power Consumption: 68mA @ 3.3V
For my mapping and survey drones, the F9P has been transformative. The multi-band reception (L1/L2/L5) and RTK capability enable centimeter-level positioning, which is essential for precision applications.
Setting up RTK does require additional components – a base station or NTRIP service for corrections, plus a data link to transmit those corrections to the drone. I use a 4G/LTE connection for my survey drone, which allows me to receive NTRIP corrections from public services.

The F9P is overkill for standard FPV or photography drones, but it's invaluable for mapping, survey, precision agriculture, and automated landing applications. Common implementations include the Here3 and Holybro H-RTK F9P.
Module Selection Guide
Choosing the right GNSS module depends on your specific needs. Here's my practical advice based on years of building and flying different configurations:
For Basic Navigation
• Recommended: NEO-M8N or equivalent
• Key Considerations:
- Adequate for RTH and position hold
- Good balance of performance and cost
- Widely supported in all navigation firmware
- Typically includes compass
I still use M8N modules in many of my builds because they're cost-effective and perform well for general navigation. If you're building a standard FPV drone with occasional position hold and return-to-home needs, the M8N is still a solid choice.
For Advanced Navigation
• Recommended: NEO-M9N or equivalent
• Key Considerations:
- Better for waypoint missions
- Faster position updates
- More reliable in challenging environments
- Worth the upgrade for serious navigation
For my autonomous waypoint drones and long-range builds, I've standardized on the M9N. The improved accuracy and update rate make a noticeable difference in navigation performance, and the ability to use all constellations simultaneously improves reliability in varied environments.
For Professional Applications
• Recommended: NEO-M10 or ZED-F9P
• Key Considerations:
- M10 for best standard GNSS performance
- F9P when centimeter precision is required
- Consider power and weight implications
- May require additional setup and configuration
My survey and mapping drones use the F9P for centimeter-precision positioning. For long-range exploration where standard meter-level accuracy is sufficient but reliability is paramount, the M10 provides the best combination of performance and power efficiency.
For Long Range/Endurance
• Recommended: NEO-M10 with power management
• Key Considerations:
- Power efficiency becomes critical
- Reliability is paramount
- Consider antenna quality and placement
- Backup navigation systems recommended
For my longest-range builds, power efficiency and reliability are the top priorities. The M10's Super-E mode provides excellent power savings while maintaining performance. I also pay particular attention to antenna quality and placement, as signal reception becomes increasingly important the further you fly.
GNSS Module Implementation
How you implement your GNSS module can be just as important as which module you choose. I've learned many lessons about optimal installation through trial and error.
Hardware Integration
Antenna Considerations
The antenna is critical for GNSS performance – a lesson I learned the hard way after several builds with suboptimal antenna placement:
• Patch Antennas: Most common in drone modules
- Advantages: Compact, directional upward, good sky view
- Disadvantages: Performance varies with orientation
- Best Practices: Mount flat with clear sky view

Most of my drones use patch antennas, which work well when mounted flat on the top plate with a clear view of the sky. I've found that even a slight tilt can reduce performance, so I'm careful to ensure the antenna is perfectly level.
• Helical Antennas: Found in some high-performance modules
- Advantages: Better reception at low elevations, less orientation sensitive
- Disadvantages: Larger, more expensive
- Best Practices: Still needs reasonable sky exposure

For my long-range builds, I prefer helical antennas despite their larger size. They're less sensitive to orientation and provide better reception when the drone is banked during turns, which helps maintain satellite lock during aggressive maneuvers.
• External Antennas: Option for some modules
- Advantages: Flexible placement, potentially better performance
- Disadvantages: Added weight, complexity, potential damage
- Best Practices: Use high-quality cable, minimize length
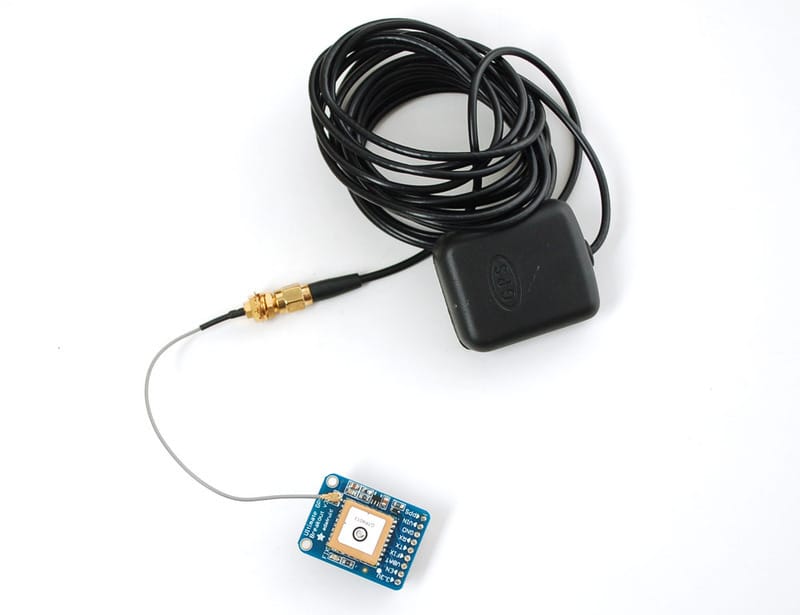
I use external antennas on my mapping drones to separate the antenna from sources of interference. The key is using high-quality, short cables – I learned through experience that cheap cables can degrade the signal significantly.
Ground Plane
The ground plane affects antenna performance – a detail many builders overlook:
• Purpose: Reflects signals and improves reception
• Implementation: Metal plate or PCB area under antenna
• Size: Ideally at least 60-80mm diameter for optimal performance
• Alternatives: Some modules include built-in ground plane

After experimenting with different ground plane configurations, I've found that a simple aluminum disk (about 70mm diameter) under the GNSS module can improve reception by 2-3dB – equivalent to 30-50% better sensitivity. For modules without built-in ground planes, this simple addition makes a noticeable difference in satellite acquisition and retention.
Mounting Location
Where you place the GNSS module matters significantly:
• Stack Mount: Inside the frame
- Advantages: Protection from crashes
- Disadvantages: Potential interference from electronics, blocked sky view
- Best Practices: Only with high-sensitivity modules, carbon fiber blocking
I've tried stack mounting GNSS modules inside the frame, but the results were disappointing due to signal blockage from the top plate. I only recommend this approach for very small builds where top mounting isn't practical, and only with high-sensitivity modules.
• Top Plate: Most common location
- Advantages: Clear sky view, away from ground interference
- Disadvantages: Exposure to crash damage
- Best Practices: Center of drone if possible

Most of my drones have the GNSS module mounted on the top plate, which provides the best sky view. I typically position it in the back in a 3D-printed extension tray for balance and to minimize the impact of frame tilt during flight.
• Mast Mount: Elevated above frame
- Advantages: Excellent sky view, reduced interference
- Disadvantages: Crash vulnerability, added weight
- Best Practices: Use with protective case

For my mapping drones where GNSS performance is critical, I use mast mounts to elevate the antenna above all potential sources of interference. The key is to use a protective case or design that can withstand crashes – I've lost a few antennas learning this lesson!
Interference Mitigation
GNSS signals are very weak and susceptible to interference – a fact I've become intimately familiar with through troubleshooting poor reception:
• Sources of Interference:
- Power distribution systems
- Video transmitters
- Motor and ESC noise
- Carbon fiber blocking
- Other radio systems
• Mitigation Strategies:
- Maintain distance from power wires and VTX
- Use shielded cables for GNSS module
- Add ferrite cores to power leads
- Consider RF shielding material
- Keep antennas away from carbon fiber
One of the biggest lessons I've learned is the importance of keeping the GNSS antenna away from video transmitters. On one build, I had persistent reception problems until I realized the VTX antenna was only 3cm from the GPS antenna. Moving it to the opposite end of the frame immediately solved the issue.
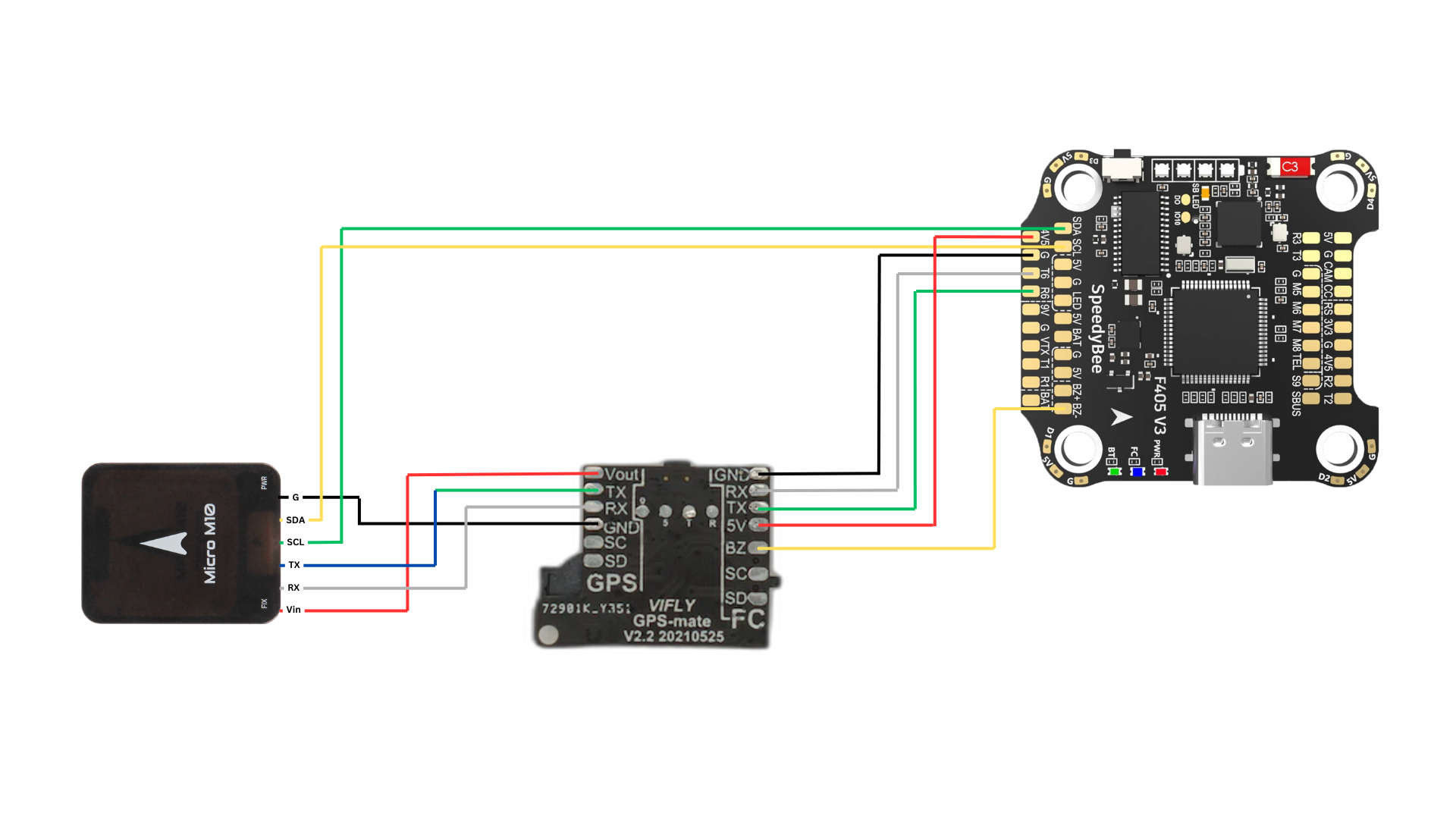
Unfortunately, in most of my builds space becomes a concern and I do not always have possibility to place the GPS module completely isolated from other antennas. In such cases, products like GPS-mate are real life-savers.

For builds with carbon fiber top plates, I always use a non-conductive standoff to elevate the GNSS module at least 10-15mm above the carbon fiber. This simple change can dramatically improve reception by preventing the carbon fiber from blocking satellite signals.
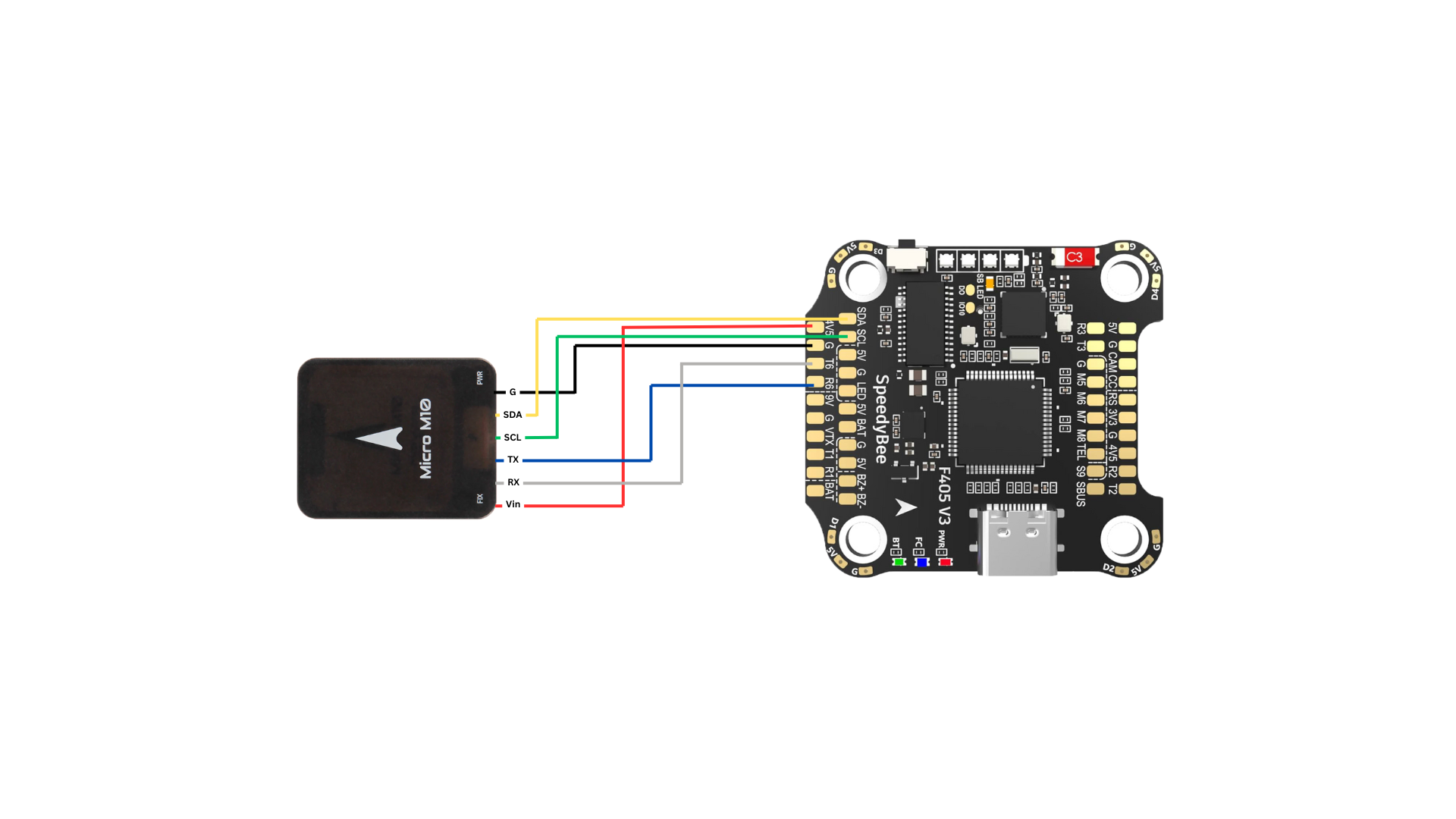
Wiring
Software Configuration
Firmware Settings
Modern flight controller firmware offers various GNSS configuration options. Here's what I've found works best in different systems:
INAV GNSS Settings
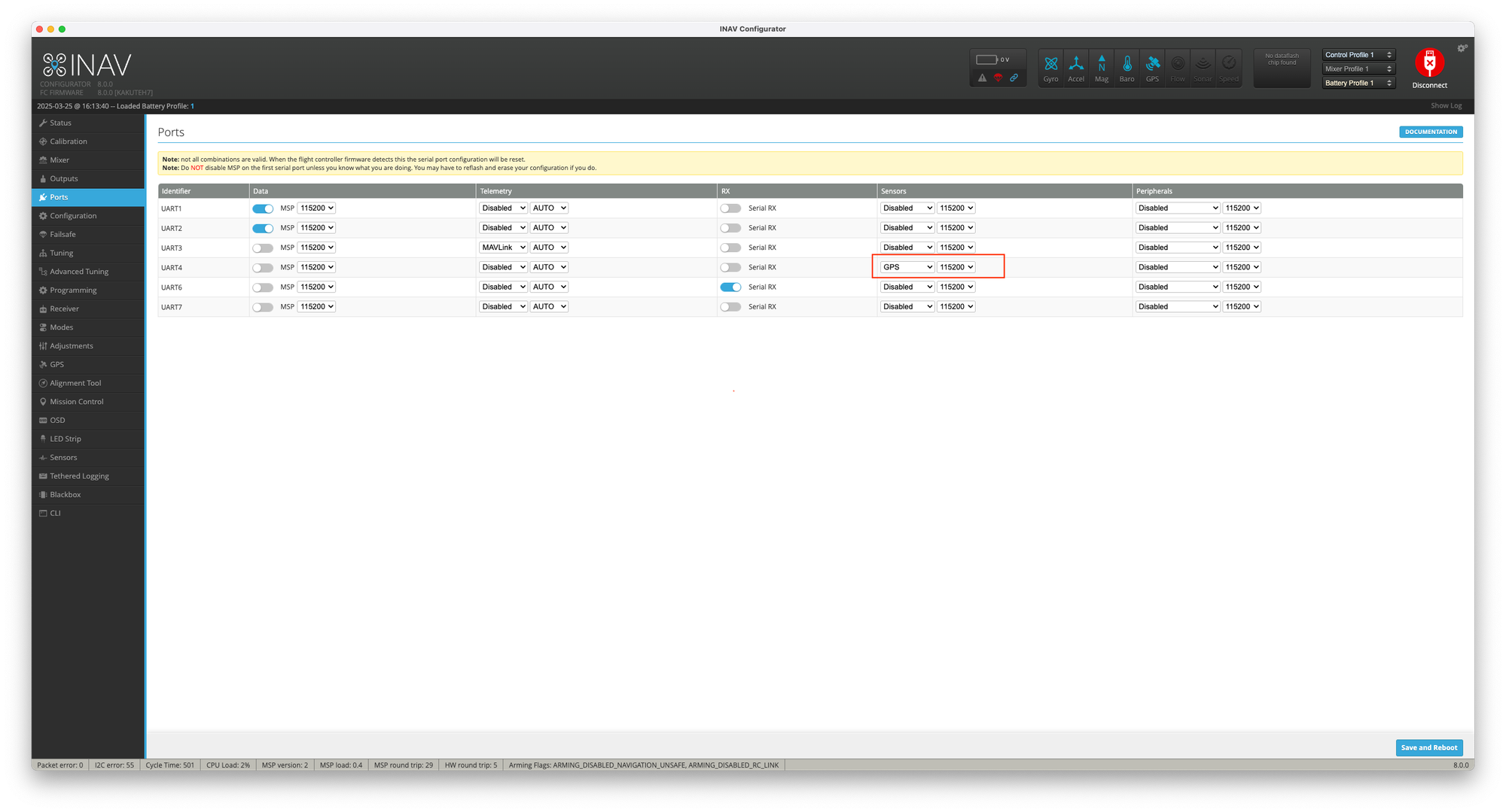
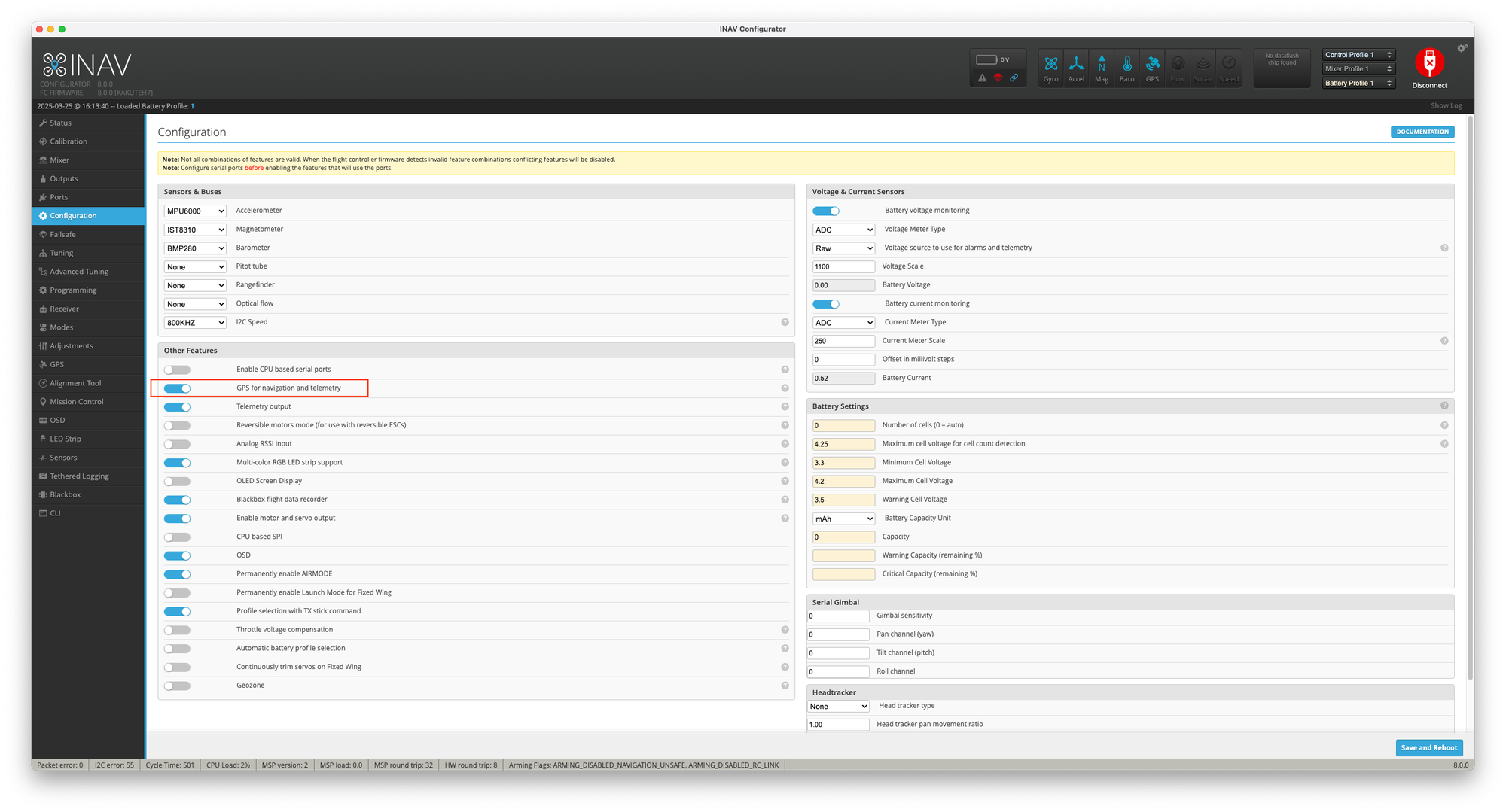
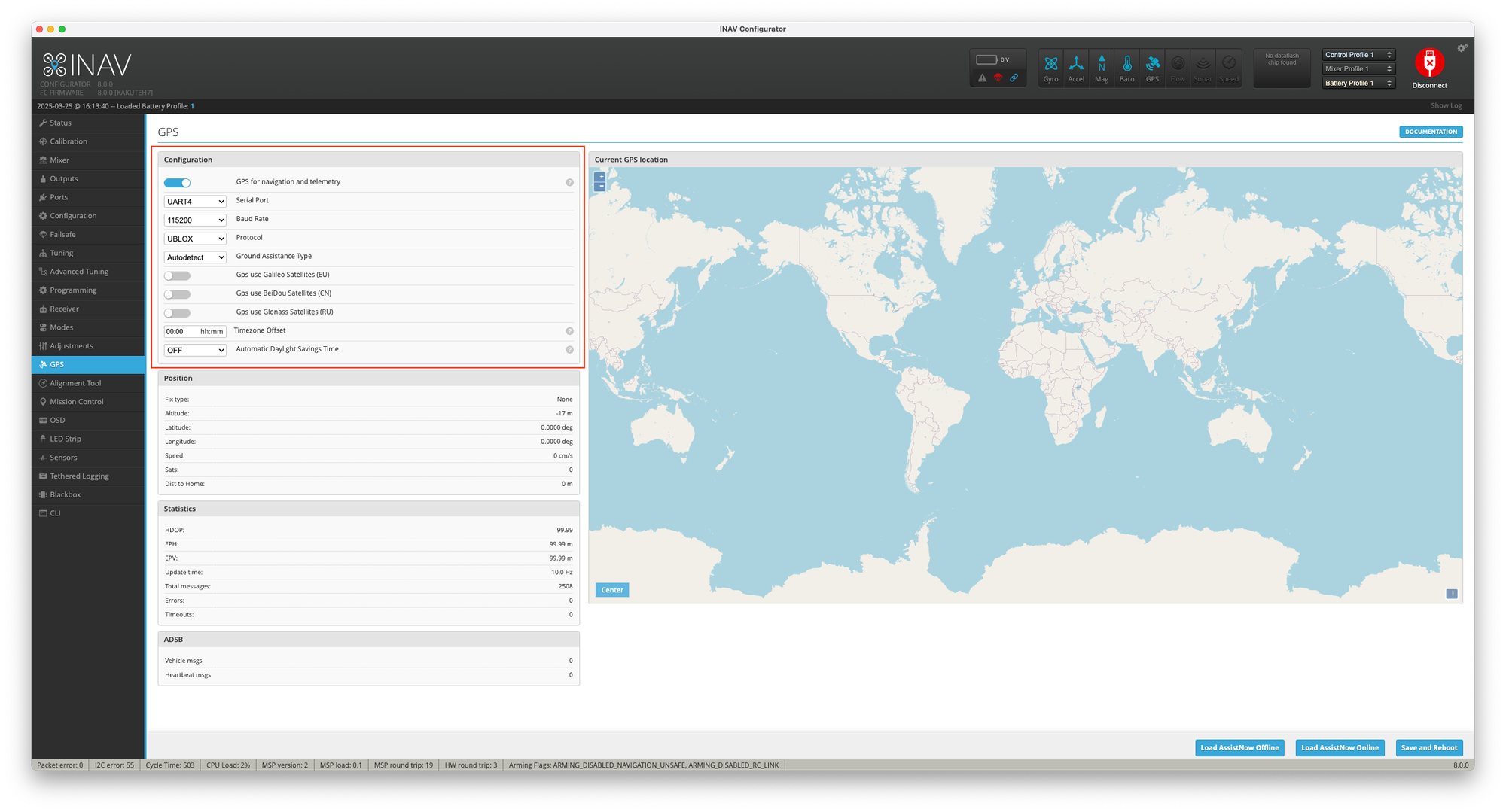
I've found that combining GNSS with barometer data provides the most stable altitude hold. Adding the magnetometer (UBLOX+BARO+MAG) can improve position estimation in some cases, but it's more susceptible to interference. It is becoming a trend to move away from magnetometers as GPS positioning precision evolves.
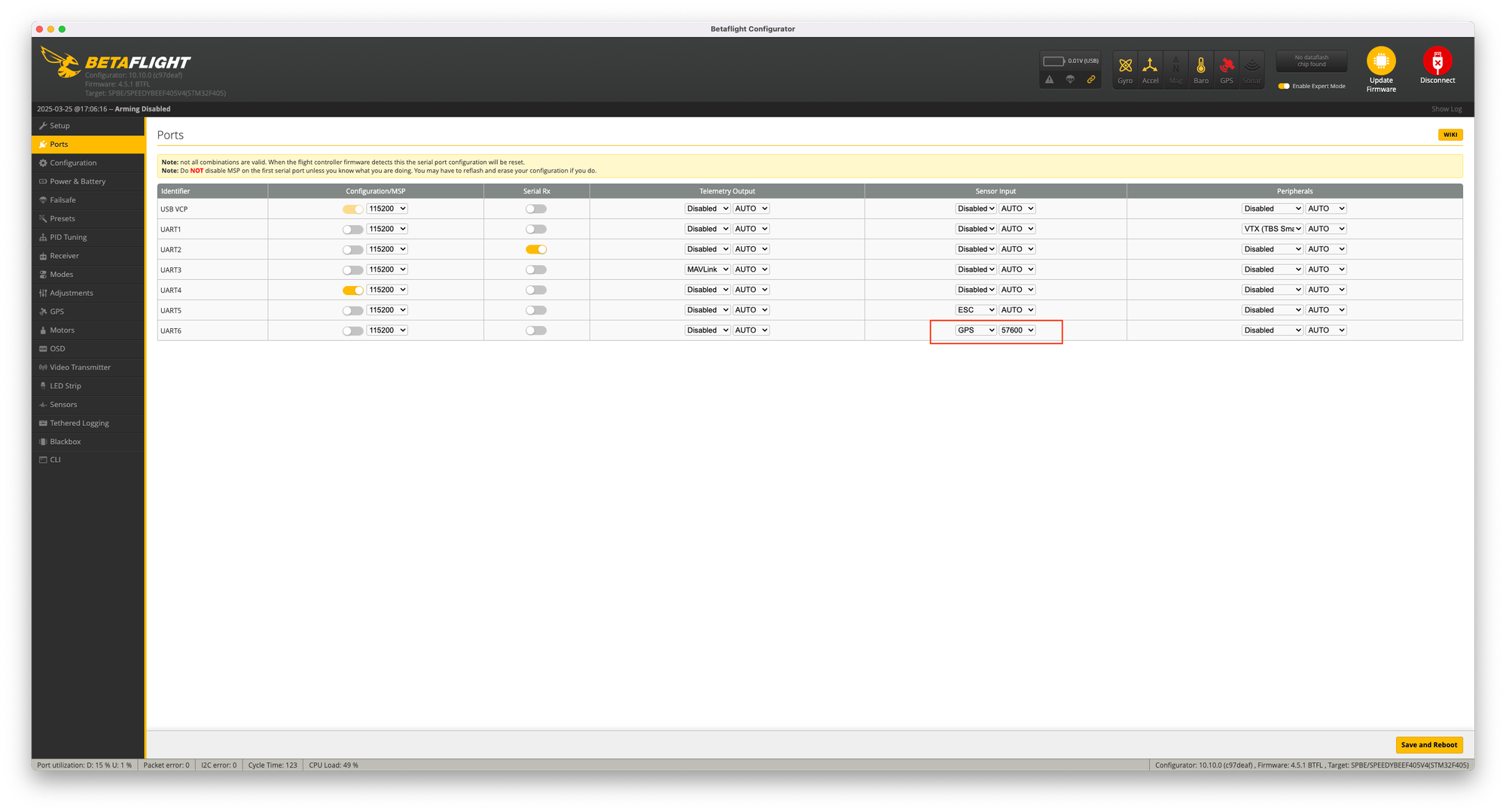
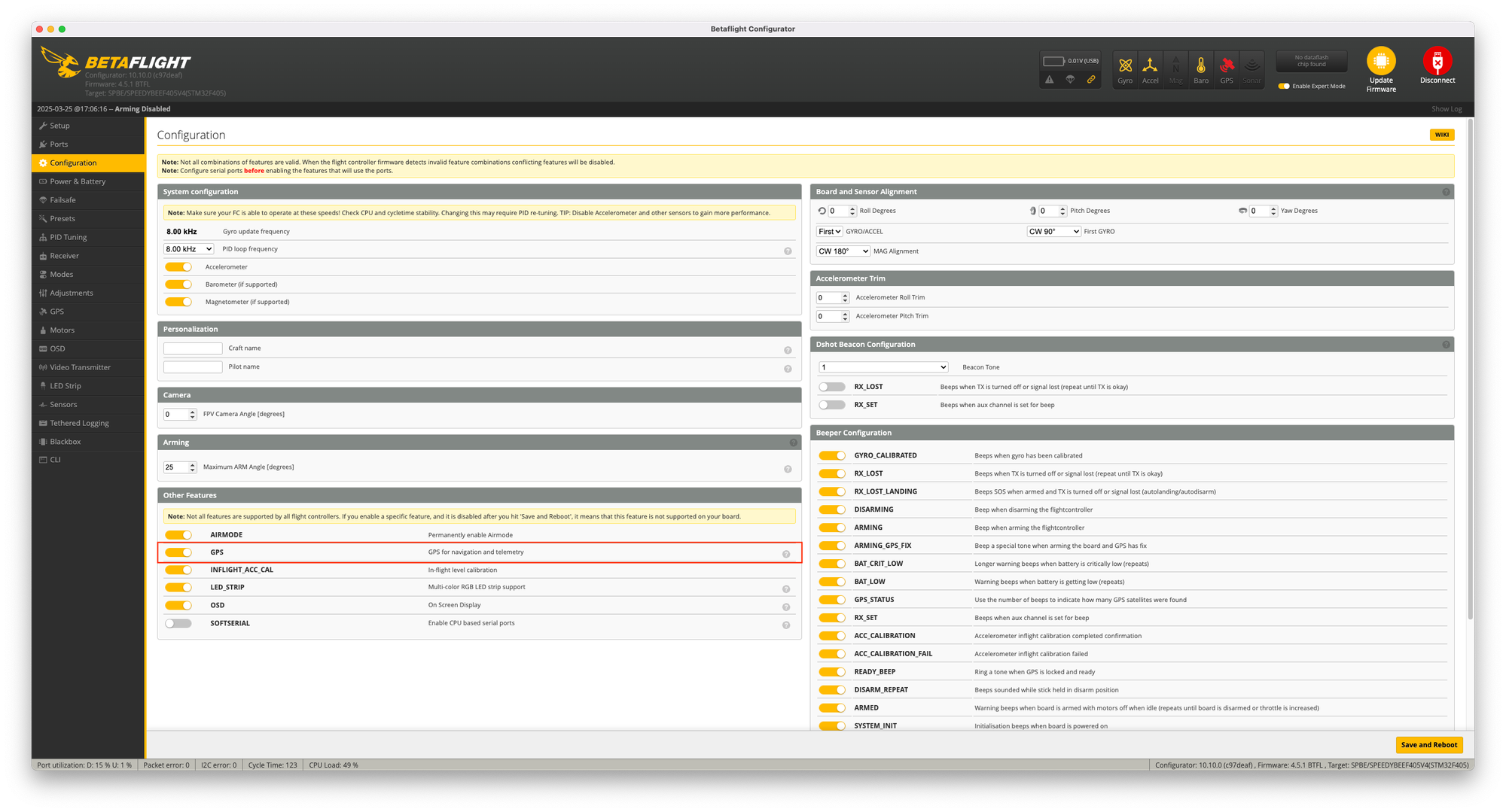
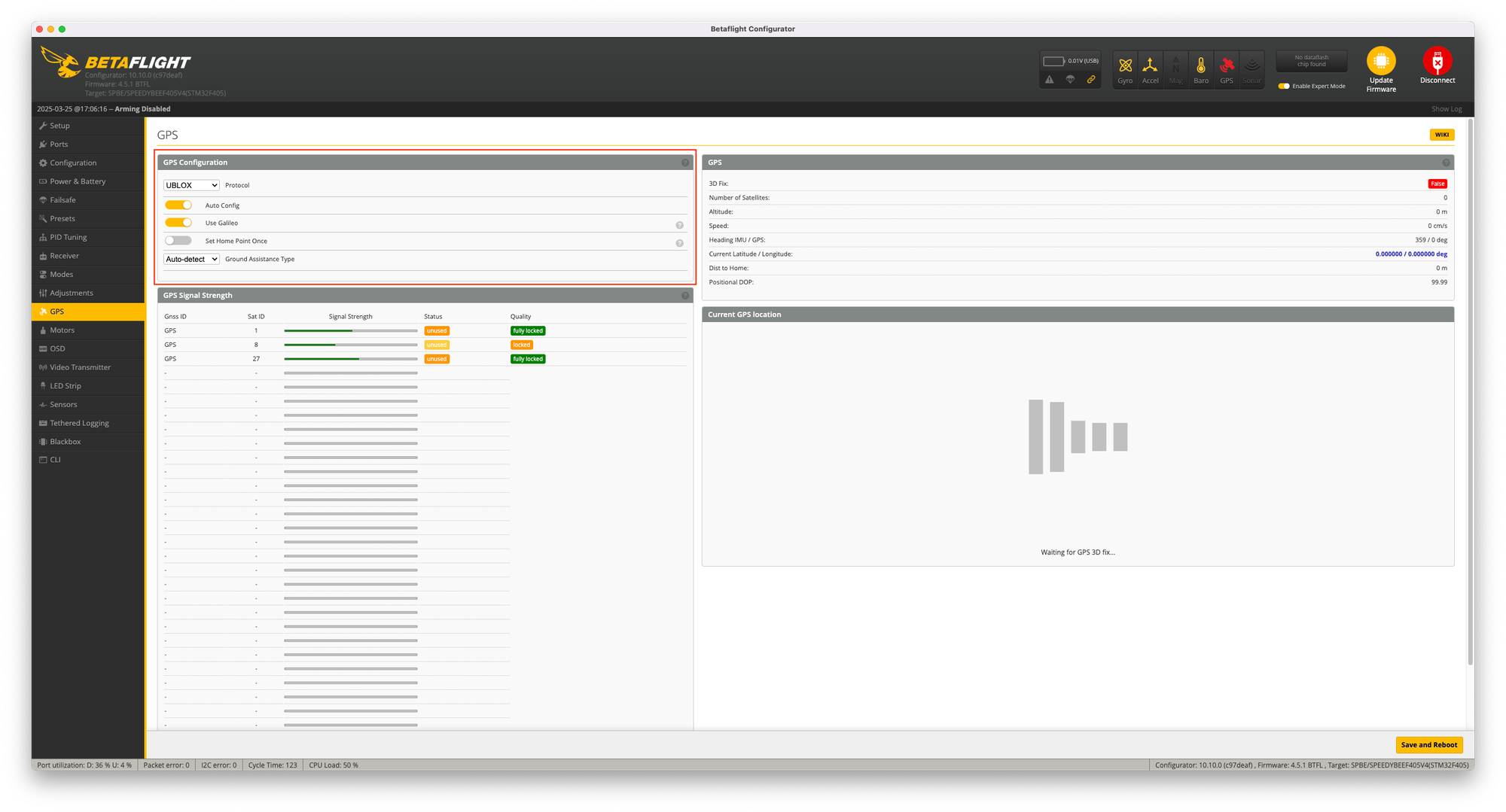
Betaflight GPS Settings
For my freestyle and racing builds with GPS rescue capability I default to the following configuration:
Advanced GNSS Topics
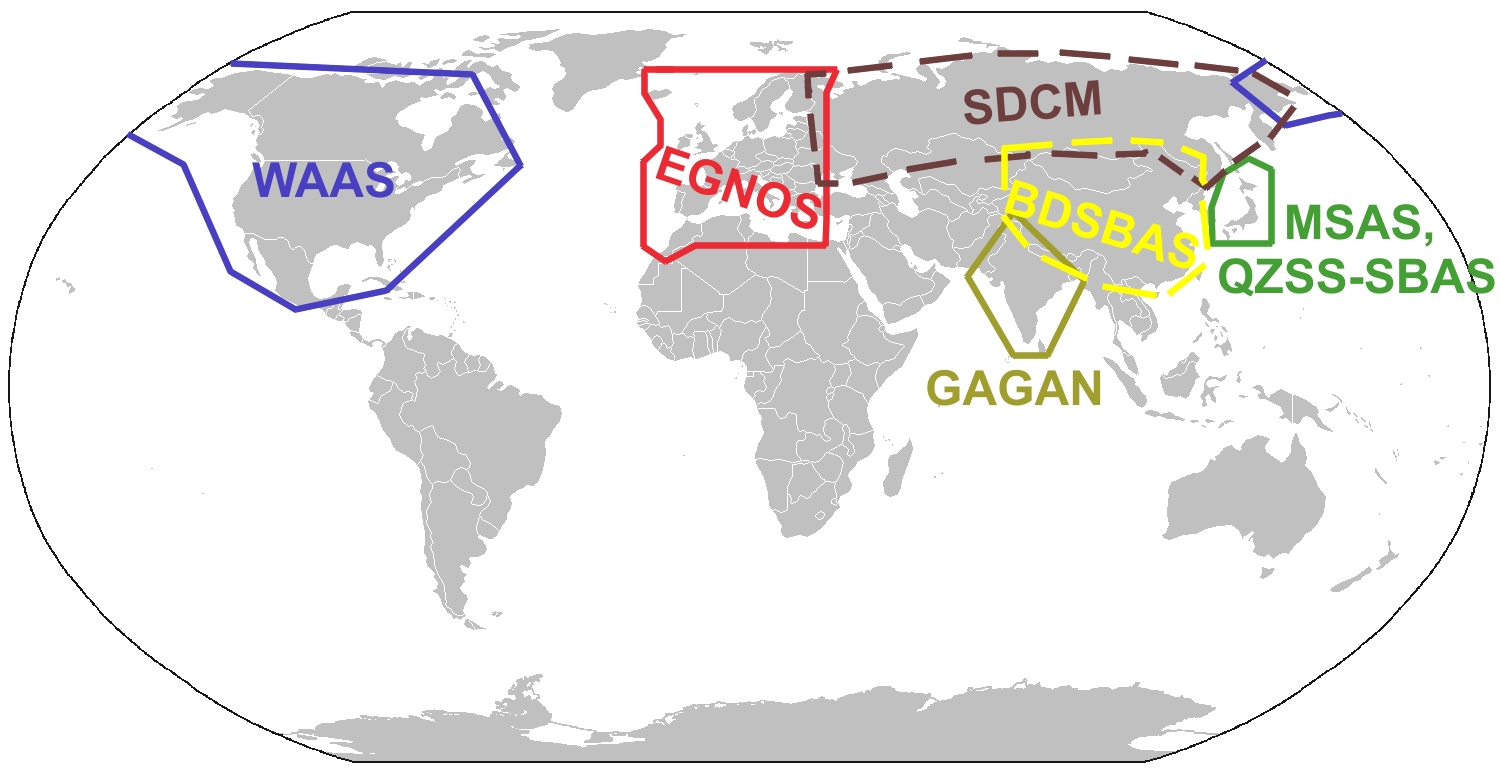
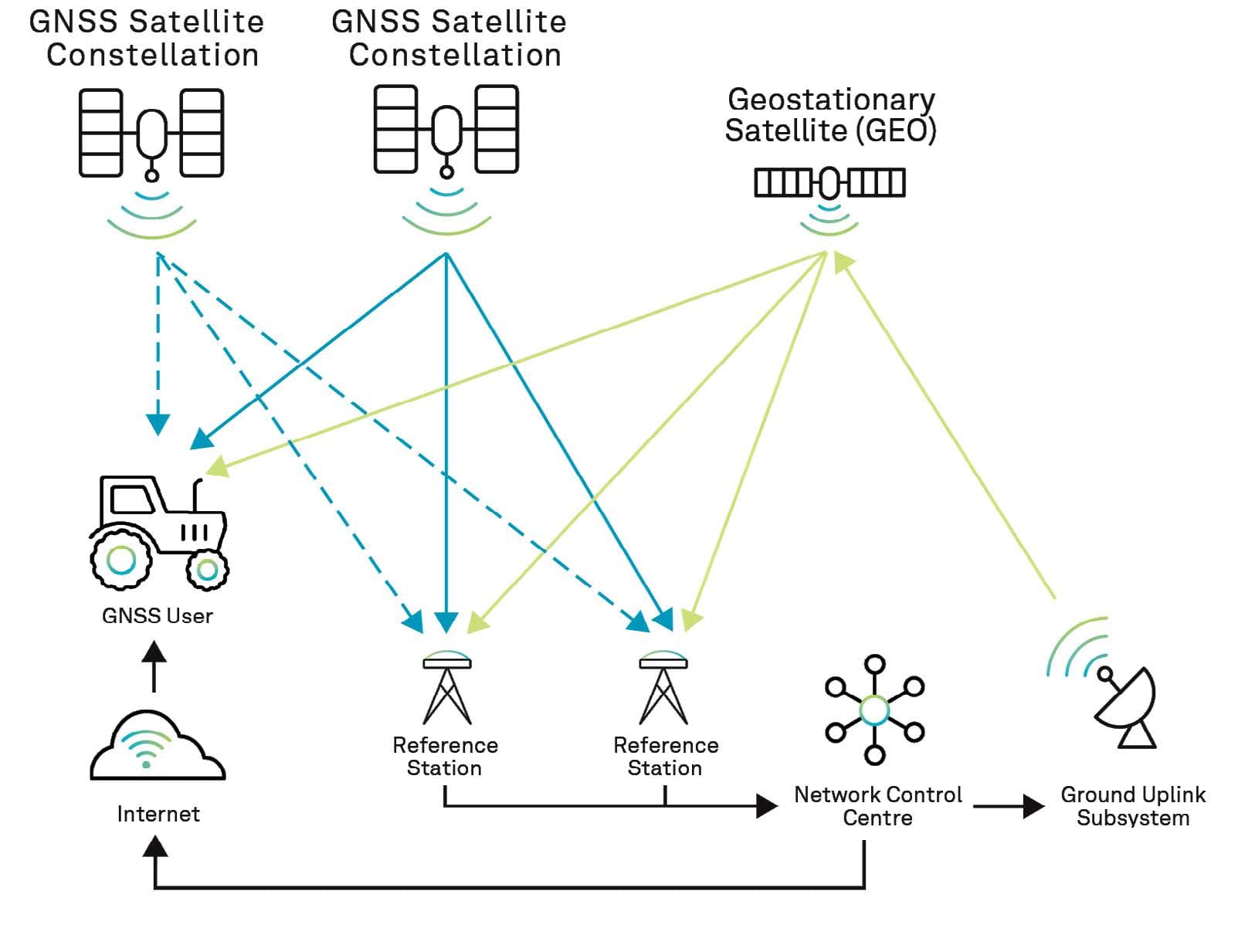
SBAS (Satellite-Based Augmentation System)
Regional systems that improve GNSS accuracy have been a significant benefit in my experience:
• WAAS (Wide Area Augmentation System): North America
• EGNOS (European Geostationary Navigation Overlay Service): Europe
• MSAS (Multi-functional Satellite Augmentation System): Japan
• GAGAN (GPS Aided GEO Augmented Navigation): India
• SDCM (System for Differential Corrections and Monitoring): Russia
These systems provide correction data that can improve accuracy from 3-5m to 1-2m. I've noticed the benefits most clearly when flying in Europe with EGNOS and North America with WAAS. The corrections are particularly valuable for altitude accuracy, which is typically the weakest dimension in GNSS positioning.
Beyond accuracy improvements, SBAS systems also provide integrity monitoring, which helps identify unreliable satellite signals. This is valuable for safety-critical applications where knowing when not to trust the position data is as important as having accurate data.
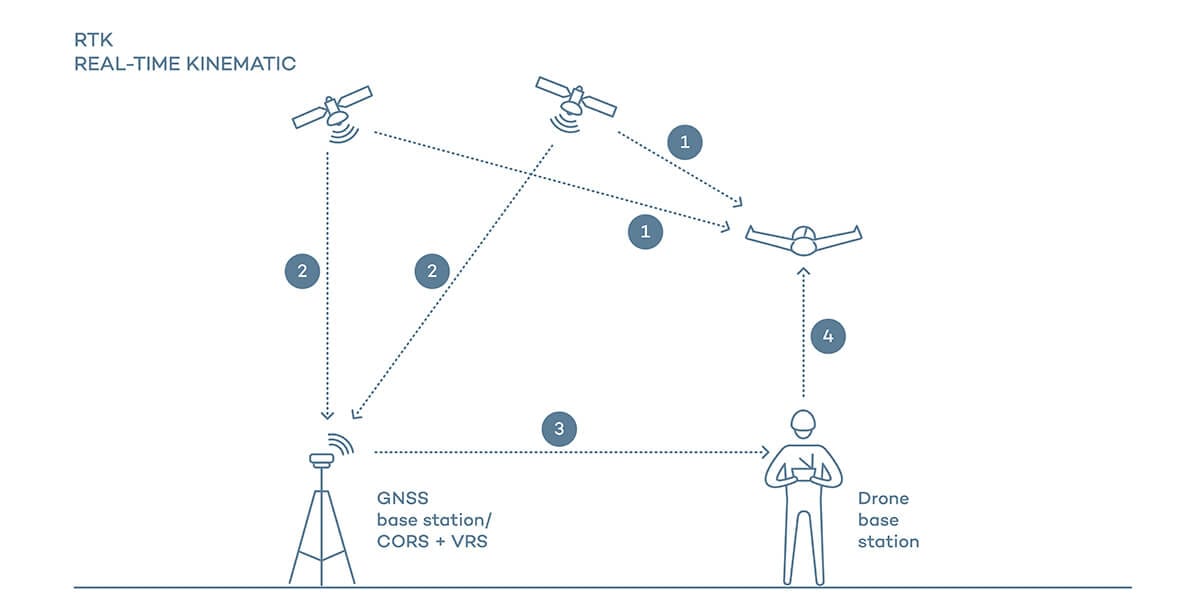
RTK (Real-Time Kinematics)
For my mapping and survey drones, RTK has been transformative:
Basic Principle: Carrier phase measurements for centimeter accuracy
Components:
- Base Station: Fixed position reference
- Rover: Mobile receiver on drone
- Correction Link: Radio or network connection
Accuracy: Typically 1-3cm in ideal conditions
Setting up RTK requires more components and complexity, but the results are worth it for precision applications. I use a 4G/LTE connection to receive NTRIP corrections from public services, which eliminates the need for a local base station.
The main limitations I've encountered with RTK are:
- Requires clear view of sky
- Base station within ~10km (though network RTK extends this)
- Reliable correction data link
- Initialization period required
For most recreational flying, RTK is overkill. But for mapping, surveying, precision agriculture, and automated landing, it's invaluable. The ability to repeatedly return to the exact same position with centimeter accuracy opens up many professional applications.
PPP (Precise Point Positioning)
For some of my remote exploration flights where RTK isn't practical:
• Basic Principle: Uses precise satellite orbit and clock data
• Advantage: No base station required
• Disadvantage: Longer convergence time (minutes to hours)
• Accuracy: Decimeter level (10-30cm)
PPP is less common in drone applications due to the convergence time requirements, but it's a valuable technique for certain specialized applications. I've used it for long-duration mapping missions where the drone has time to achieve convergence before beginning the mapping pattern.
Multi-Band Reception
The latest high-end modules like the ZED-F9P use multiple frequency bands:
• Single-Frequency: Most drone GNSS (L1/E1/B1)
• Dual-Frequency: High-end modules (L1+L5/E5/B2)
• Advantages:
- Better multipath mitigation
- Faster RTK initialization
- Improved accuracy
- Better performance in challenging environments
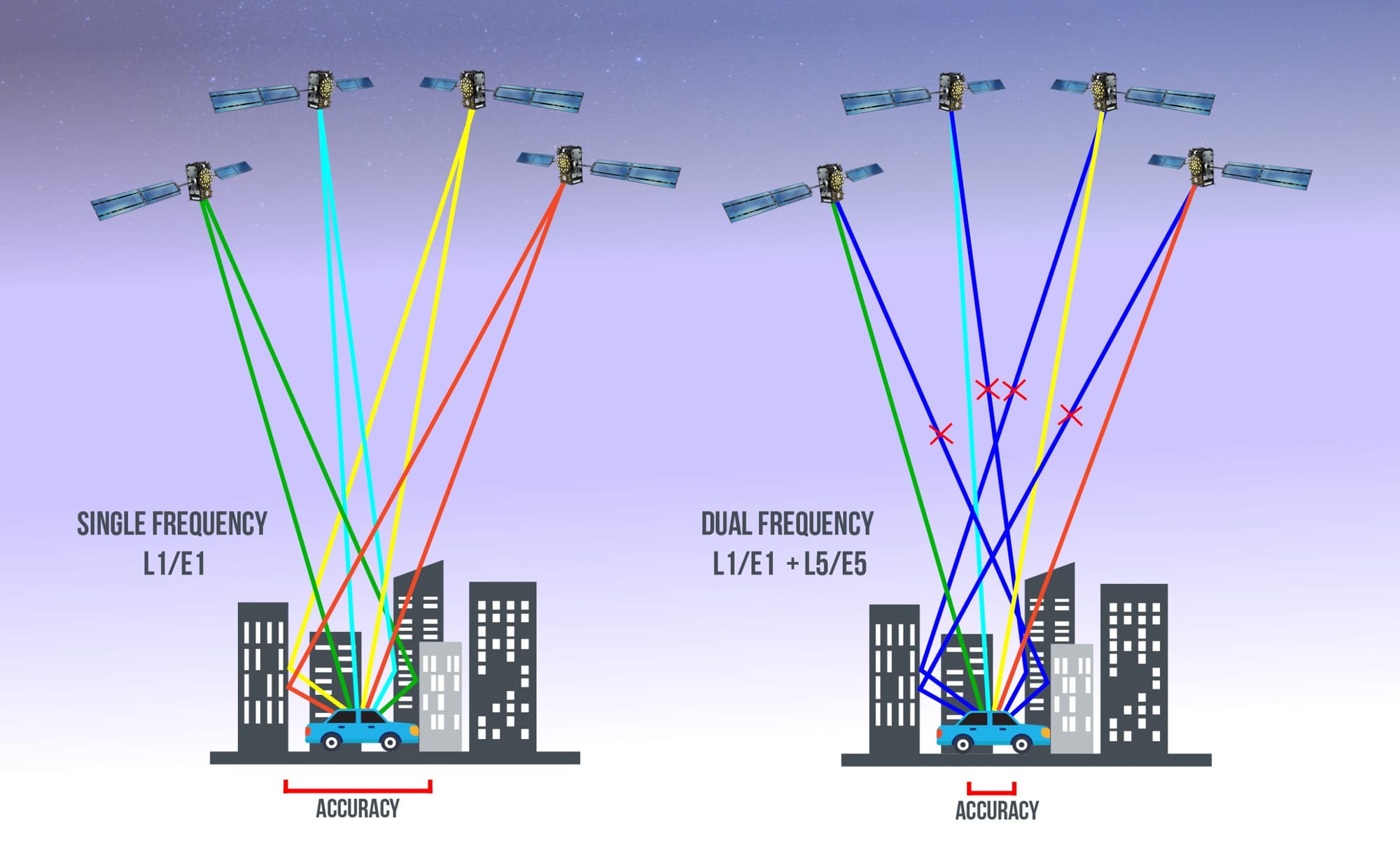
The difference is noticeable – my F9P-equipped survey drone achieves RTK fix much faster than older single-frequency RTK systems I've used. The multipath mitigation is particularly valuable in environments with reflective surfaces like water or buildings.
Troubleshooting GNSS Issues
Over the years, I've encountered and solved countless GNSS problems. Here are the most common issues and their solutions:
Poor Satellite Reception
Symptoms:
- Few satellites acquired
- High HDOP values
- Inconsistent position data
- Frequent GNSS loss
Solutions:
- Improve antenna placement – I've seen dramatic improvements just by moving the antenna a few centimeters away from interference sources.
- Move away from interference sources – particularly video transmitters and power wires.
- Use multi-constellation module – more satellites means more chances for good reception.
- Check for physical obstructions – carbon fiber is particularly problematic.
- Verify antenna connection – loose connections can cause intermittent issues.
I once spent hours troubleshooting poor reception on a new build, only to discover that the carbon fiber top plate was blocking signals. Adding a 15mm standoff to elevate the module solved the problem instantly.
Slow Satellite Acquisition
Symptoms:
- Long time to first fix
- Delayed GPS lock before flight
Solutions:
- Update to newer module – each generation has improved acquisition times.
- Enable all available constellations – more satellites means faster acquisition.
- Set appropriate dynamic model – using "Pedestrian" for a drone can slow acquisition.
- Ensure battery voltage is stable – voltage sags can reset the acquisition process.
- Consider external antenna for challenging environments – sometimes the built-in antenna just isn't enough.
I've found that keeping the receiver powered between flights (using a small battery) can dramatically reduce acquisition time by maintaining the ephemeris data.
Position Drift
Symptoms:
- Position hold gradually moves
- RTH lands away from takeoff point
- Waypoints not accurately followed
Solutions:
- Wait for better satellite coverage (lower HDOP) – I always wait for HDOP < 2.0 before trusting position data.
- Increase minimum satellite requirement – more satellites generally means better accuracy.
- Enable SBAS if available – the corrections can significantly reduce drift.
- Check for magnetic interference affecting compass – compass issues often masquerade as GNSS problems.
- Consider environmental factors (trees, buildings) – multipath reflections can cause position errors.
On one mapping mission, I noticed the drone gradually drifting off course. The problem turned out to be a poorly calibrated compass being affected by the motors. Recalibrating the compass away from any metal objects solved the issue.
GNSS Glitches
Symptoms:
- Sudden position jumps
- Erratic navigation behavior
- Temporary loss of position
Solutions:
- Adjust GNSS filtering parameters – most firmware has settings to smooth GNSS data.
- Increase navigation smoothing – this can filter out momentary glitches.
- Check for intermittent electrical interference – switching power supplies are common culprits.
- Update to latest firmware – many GNSS issues are addressed in firmware updates.
- Consider hardware upgrade to newer generation – newer receivers have better rejection of spurious signals.
I've found that adding a capacitor to the power input of the GNSS module can help reduce glitches caused by electrical noise from the power system.
Diagnostic Tools
U-Center (Ublox Configuration Software)
This is my go-to tool for diagnosing GNSS issues:
• Purpose: Configure and monitor Ublox GNSS receivers
• Features:
- Real-time satellite tracking
- Signal quality monitoring
- Configuration parameter adjustment
- Firmware updates
- Performance analysis
I connect via USB or UART passthrough from the flight controller. The satellite signal strength view is particularly useful for identifying interference issues – you'll see all satellites with reduced signal strength rather than just specific ones.
https://www.u-blox.com/en/product/u-center
GNSS Viewers
Built into most flight controller software:
• Purpose: Visualize GNSS performance
• Examples:
- Mission Planner GPS Status
- INAV GPS Setup Screen
- Betaflight GPS Tab
I always check these before flights to verify good reception. The key metrics I monitor are:
- Satellite count (more is better, I like to see 14+ for critical missions)
- HDOP value (lower is better, I aim for < 1.5)
- Fix type (3D is required for navigation, RTK float/fixed for precision applications)
- Signal strength (indicates reception quality and potential interference)
Blackbox Analysis
For post-flight diagnosis:
• Purpose: Review GNSS performance during flight
• Tools:
- Blackbox Explorer
- Flight Review (ArduPilot)
I've identified many subtle issues through blackbox analysis that weren't apparent during flight. Key data to examine includes:
- Position accuracy over time
- Home point drift
- Navigation performance
- GNSS signal quality
Comparing GNSS data with other sensors (like accelerometers) can reveal integration issues that affect navigation performance.
Future Trends in GNSS Technology
Based on my experience with the latest modules and industry developments, here's where I see GNSS technology heading:
Hardware Advancements
• Multi-Band Standard: Dual-frequency is becoming more common in consumer devices. I expect this to reach hobby drones within 2-3 years, bringing better accuracy and reliability.
• Miniaturization: Smaller, lighter modules with better performance. The trend toward integration will continue, with GNSS, compass, barometer, and even IMU in single packages.
• Integration: Combined GNSS, compass, barometer, and radio. I'm already seeing this in some high-end modules, and it simplifies wiring and reduces weight.
• Power Efficiency: Extended battery life for long-range missions. The M10's Super-E mode is just the beginning – future modules will likely reduce power consumption even further.
• Antenna Technology: Improved reception in smaller packages. Antenna design continues to advance, with better performance from smaller form factors.
Software Innovations
• Improved Algorithms: Better position estimation and filtering. Machine learning approaches are starting to appear in commercial systems and will eventually reach hobby drones.
• AI-Enhanced Positioning: Machine learning for challenging environments. I've seen early research using neural networks to improve positioning in urban canyons.
• Sensor Fusion: Tighter integration with other navigation sensors. The lines between GNSS, visual positioning, and inertial navigation will continue to blur.
• Integrity Monitoring: Better detection of unreliable signals. As drones become more autonomous, knowing when not to trust GNSS data becomes increasingly important.
• Simplified Setup: More intuitive configuration. The complexity of GNSS setup has been a barrier for many users, but newer systems are becoming more plug-and-play.
Emerging Technologies
• LEO Satellite Navigation: Low Earth Orbit constellations for improved accuracy. Systems like Starlink could potentially offer navigation services with better urban performance than traditional GNSS.
• Vision-Aided Navigation: Cameras enhancing GNSS in challenging environments. I'm already using this on some builds, where optical flow sensors complement GNSS for more robust positioning.
• Quantum Sensors: Next-generation positioning technology. Still in research labs, but quantum sensors promise dramatic improvements in accuracy without external references.
• Advanced Authentication: Protection against spoofing attacks. As GNSS spoofing becomes more common, authentication features will become more important for critical applications.
• Mesh Positioning: Drones sharing position data in swarms. I've experimented with this in multi-drone setups, where drones can use relative positioning to enhance their absolute position estimates.
FAQ: Common Questions About Drone GNSS Technology
What's the difference between GPS, GNSS, and GLONASS?
This is one of the most common questions I get when helping people with their builds:
• GPS (Global Positioning System): The American satellite navigation system operated by the US Space Force. It's the original and most widely used system.
• GNSS (Global Navigation Satellite System): The umbrella term for all satellite navigation systems, including GPS, GLONASS, Galileo, BeiDou, and regional systems. Modern receivers typically use multiple GNSS constellations simultaneously.
• GLONASS: Russia's satellite navigation system, similar to GPS but with different orbital characteristics and signal structure. It's the second-oldest global system and provides good coverage at high latitudes.
When someone refers to a "GPS module" for a drone, they're typically talking about a GNSS receiver that can use multiple satellite constellations, not just the American GPS system. I always clarify this when helping newcomers to avoid confusion.
Is a newer generation GNSS module worth upgrading to?
Based on my experience upgrading numerous drones:
• M6/M7 to M8: Significant improvement in acquisition time, constellation support, and accuracy. Definitely worth upgrading.
• M8 to M9: Noticeable improvements in accuracy, update rate, and multi-constellation performance. Worth upgrading for serious navigation use.
• M9 to M10: Incremental improvements in sensitivity, power consumption, and urban performance. Worth considering for specialized applications or if power efficiency is critical.
For most hobby pilots, an M8N module is still adequate for basic navigation, while an M9N provides excellent performance for more demanding applications. The M10 series or F9P are primarily beneficial for professional or specialized uses.
I upgraded my long-range exploration drone from M8N to M9N and noticed immediate improvements in acquisition time and position stability. For my freestyle quads that only use GPS for return-to-home, I've kept the M8N modules as they're perfectly adequate for that purpose.
How many satellites do I need for reliable navigation?
From my experience with dozens of GNSS-equipped drones:
• Minimum functional: 5-6 satellites
• Recommended minimum: 8 satellites
• Good performance: 10-14 satellites
• Excellent performance: 15+ satellites
However, satellite count is only part of the equation. HDOP (Horizontal Dilution of Precision) is equally important—a lower HDOP value (ideally under 2.0) indicates better satellite geometry and more accurate positioning.
I've had situations with 20+ satellites but poor HDOP due to all satellites being clustered in one part of the sky, resulting in mediocre positioning. Conversely, I've had excellent performance with just 9 satellites well-distributed across the sky, giving a low HDOP.
Modern multi-constellation receivers can often see 20+ satellites in open sky conditions, providing excellent redundancy and accuracy.
Does using multiple constellations drain the battery faster?
A question I often get from pilots concerned about flight time:
Using multiple GNSS constellations does increase power consumption slightly, but the impact is relatively small:
• GPS-only: Baseline power consumption
• GPS+GLONASS: ~10-15% more power than GPS-only
• GPS+GLONASS+Galileo+BeiDou: ~20-30% more power than GPS-only
For context, a typical M8N module draws about 25mA, while a full multi-constellation configuration might draw 30-35mA. On a drone with a current draw of 5-20A during flight, this difference is negligible (less than 0.5% of total power consumption).
I've measured the difference on my long-range builds, and the impact on flight time is imperceptible. The benefits of improved accuracy, faster acquisition, and better reliability almost always outweigh the minimal power impact.
Which GNSS constellation is the most accurate?
Based on my testing across different regions:
• GPS: Generally 3-5m accuracy, very consistent and reliable
• GLONASS: Typically 4-7m accuracy, better at high latitudes
• Galileo: 1-3m accuracy, designed for civilian precision
• BeiDou: 3-5m globally, 2-3m in Asia-Pacific region
However, the best performance comes from using multiple constellations together, as they complement each other's strengths and weaknesses. A modern receiver using all available constellations will typically achieve 1-3m accuracy in good conditions, better than any single constellation alone.
In my experience, Galileo currently offers the best civilian accuracy of the global systems, but its advantage is most noticeable when combined with other constellations.
Can I use RTK on a regular drone?
Yes, RTK can be implemented on regular drones with some considerations:
Requirements:
- RTK-capable GNSS module (like ZED-F9P)
- Flight controller with RTK support (ArduPilot, INAV with limitations)
- Base station or NTRIP service for corrections
- Data link for correction transmission (telemetry radio, 4G/LTE)
Practical Considerations:
- Added cost ($150-300 for RTK hardware)
- Increased complexity in setup
- Need for correction data source
- Limited benefit for standard FPV flying
I've implemented RTK on several builds, and while the centimeter-level accuracy is impressive, it's generally unnecessary for recreational flying, racing, or freestyle. Where RTK makes sense is for mapping, survey, precision agriculture, and automated landing applications.
For my survey drone, I use a ZED-F9P module with a 4G connection to receive NTRIP corrections from a public service. The setup was more complex than a standard GNSS implementation, but the results are worth it for professional applications.
How do environmental factors affect GNSS performance?
Various environmental factors can significantly impact GNSS reception:
• Urban Canyons: Buildings block and reflect signals, reducing accuracy by 5-10x. I've seen position errors of 20+ meters in dense urban environments with single-constellation receivers.
• Dense Foliage: Trees can attenuate signals by 10-30dB, reducing satellite visibility. I've found that flying above the tree canopy is often necessary for reliable navigation in forested areas.
• Water Bodies: Reflections can cause multipath errors. When mapping coastlines, I've noticed position jumps near the water's edge due to signal reflections.
• Weather: Heavy rain can slightly degrade signals (1-2dB attenuation). In my experience, this rarely causes noticeable performance issues.
• Ionospheric Conditions: Solar activity can affect accuracy. During solar storms, I've observed slightly degraded performance, though modern receivers handle this well.
• Jamming Sources: Nearby RF interference can block reception. I once had a drone refuse to get a position lock until I realized my wireless microphone system was causing interference.
Multi-constellation receivers help mitigate these issues by providing more satellites and frequencies to work with, but no GNSS system is completely immune to environmental challenges. For critical applications in challenging environments, I always consider supplementary navigation technologies like optical flow or visual positioning.
Conclusion
GNSS technology has evolved dramatically from its military origins to become an essential component of modern drone systems. The transition from single-constellation GPS to multi-constellation GNSS receivers has significantly improved navigation performance, reliability, and capabilities.
Understanding the differences between GPS, GLONASS, Galileo, and BeiDou—as well as the evolution of receiver technology from early modules to the latest M10 and F9P generations—allows drone pilots to make informed decisions about their navigation systems. Whether you're flying for recreation, racing, freestyle, or professional applications, selecting the appropriate GNSS technology and implementing it correctly can enhance your drone's capabilities and safety.
As GNSS technology continues to advance with multi-band reception, improved algorithms, and integration with other sensors, we can expect even better performance in challenging environments and more precise positioning for specialized applications. By staying informed about these developments and understanding how to optimize your current setup, you can ensure your drone navigation system performs at its best.



Comments ()