无人机减震

在过去十年中构建和飞行了数百架无人机后,我了解到有效的振动管理通常是平庸和卓越性能之间的区别。这份全面指南基于我在各种无人机平台上的广泛实践经验,探讨了振动源、阻尼技术、材料和实用的实施策略。
无人机振动阻尼简介
我在2020年组装的第一架严肃的FPV无人机拥有所有合适的组件——高质量电机、受人尊敬的飞控以及坚固的机架。然而它却遭受了持续的飞行问题和糟糕的视频质量。经过数周的故障排除,我发现罪魁祸首是:过多的振动传递到了飞控和相机。实施适当的振动阻尼将那架无人机从令人沮丧的不可预测变成了坚如磐石的可靠。
振动阻尼是将敏感组件与多旋翼飞行器固有的机械振动隔离开来的做法。虽然初学者经常忽视它,但它是无人机构建中影响以下方面的关键因素:
- 飞行性能:过度振动会干扰陀螺仪和加速度计,导致飞行不稳定。我见过完全相同组件的无人机仅因为振动隔离的差异而性能迥异。
- 视频质量:振动会在镜头中产生微抖动,并可能在视频中造成"果冻"效应。我一些最流畅的电影镜头来自对振动管理一丝不苟的无人机。
- 组件寿命:持续振动会损坏电子元件并松动机械连接。在实施适当的阻尼后,我的飞控使用寿命延长了数年之久。
- 传感器精度:导航、高度和定位传感器在减少振动后都表现得更好。我在优化振动隔离后测量到位置保持精度显著提高。
- 整体可靠性:减少振动意味着更少的飞行中故障和更一致的性能。我最可靠的无人机都有一个共同特点:出色的振动管理。
理解无人机振动
在有效地阻尼振动之前,必须了解振动的来源、特性和影响:
振动源
通过广泛的测试和分析,我确定了多旋翼飞行器中的这些主要振动源:
- 电机和螺旋桨:大多数无人机的主要振动来源。我测量了平衡良好和平衡不良的螺旋桨之间超过300%的振动差异。
- 机架共振:某些机架设计会在特定频率下放大振动。我遇到过在特定油门位置剧烈共振的机架,产生振动尖峰。
- 损坏的组件:弯曲的电机轴、损坏的轴承或开裂的机架会产生异常振动。现在我在任何严重撞击后都会进行振动分析,以识别潜在的损坏。
- 松动连接:固定不牢的组件会产生自己的振动模式。我曾通过适当拧紧所有机架螺栓来解决神秘的振动问题。
- 空气动力效应:湍流和螺旋桨洗涤产生可变的振动模式。在接近表面或特定飞行动作时,这些变得特别明显。
振动特性
了解振动类型有助于选择合适的阻尼解决方案:
- 频率范围:不同组件在不同频率下产生振动。通过频谱分析,我发现典型的迷你四轴电机在100-300Hz范围内产生主要振动。
- 振幅:振动强度随油门位置和飞行条件而变化。在大多数无人机中,我测量到峰值振动出现在大约70-80%油门时。
- 方向分量:振动沿不同轴(X、Y、Z)发生。在我的测试中,四轴飞行器的垂直(Z轴)振动通常最强。
- 谐波:基频的倍数频率振动。这些高频谐波对某些组件尤其有问题。
- 共振点:机架或组件自然放大振动的频率。我已经为常用机架绘制了共振点图,以避免在关键动作期间在这些油门位置运行。
对不同组件的影响
各种无人机组件受振动影响不同:
- 飞控:陀螺仪和加速度计可能将振动误解为实际运动。我见过由振动引起的震荡,在解决振动问题之前,任何PID调参都无法修复。
- 相机:FPV和高清相机都会受到振动影响,滚动快门相机尤其容易出现"果冻"效应。我一些最令人沮丧的视频问题是通过振动管理而不是相机升级解决的。
- GPS/导航传感器:位置精度会因过度振动而下降。在为GPS模块实施适当的振动隔离后,我测量到位置保持精度提高了3倍。
- 电子元件:焊点和连接可能在持续振动下过早失效。我曾通过重新焊接因振动而松动的元件来修复"死亡"电子设备。
- 电池连接:振动会导致间歇性电源问题。在经历了空中掉电后,我现在在高振动无人机中为电池连接使用软安装技术。
测量振动
量化振动对于我系统的阻尼方法至关重要:
- 黑匣子日志记录:飞控日志提供详细的振动数据。我分析陀螺仪数据轨迹以识别有问题的频率范围和共振点。

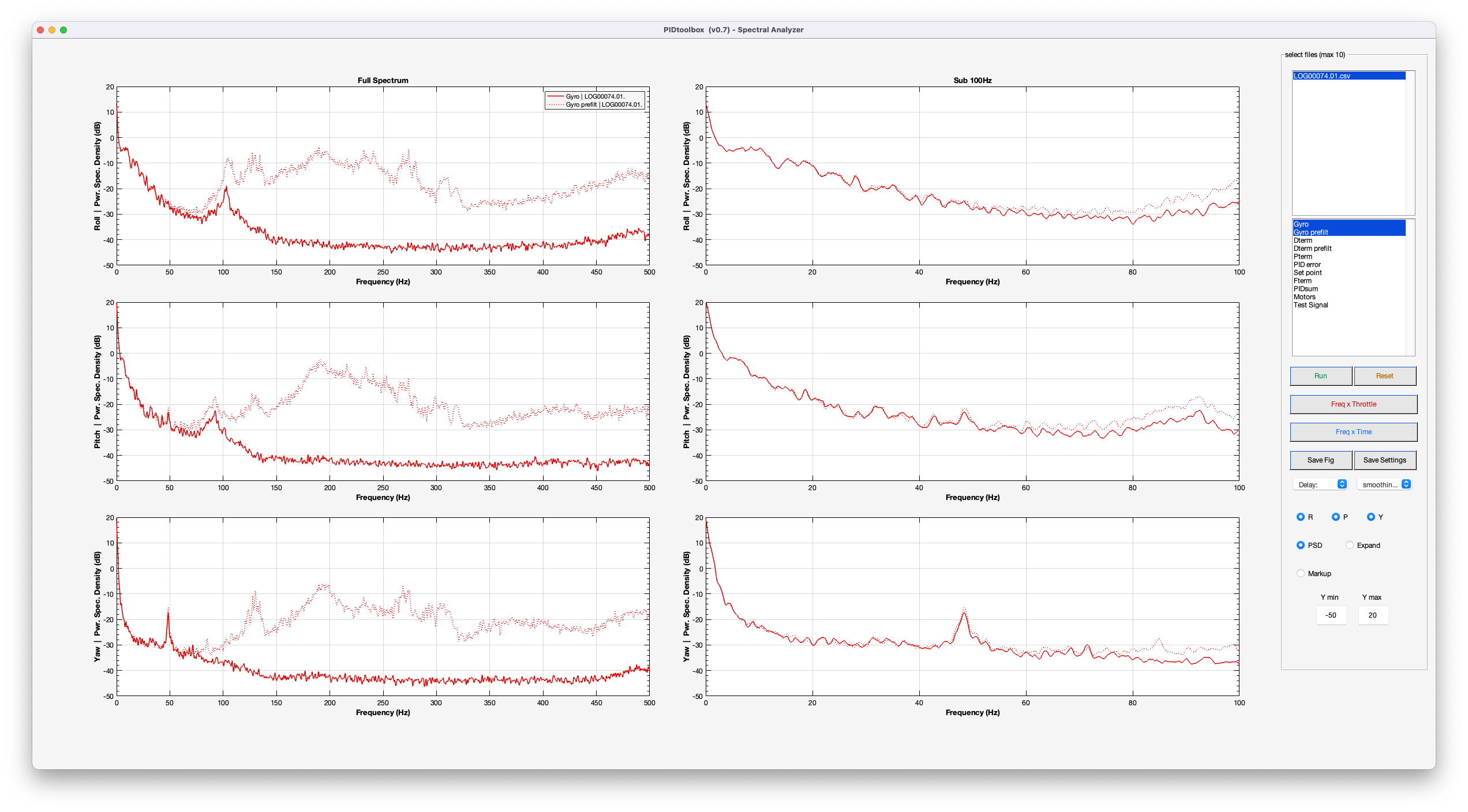
- 频谱分析:软件工具可识别特定的问题频率。这对于将阻尼解决方案针对特定振动范围非常有价值。尽管不适合初学者,但PID工具箱是执行频谱分析的强大工具。
- 加速度计应用:智能手机应用可以提供基本的振动测量。当黑匣子日志记录不实用时,我使用这些进行快速现场评估。
- 视觉指标:相机镜头提供振动问题的视觉证据。我已经培养出从视频中识别特定振动问题视觉特征的眼光。
- 触摸测试:在电机测试期间物理感受振动。这种简单的技术帮助我在飞行前识别松动的组件和共振问题。
振动阻尼材料和方法
经过多年的实验,我使用了许多阻尼材料和方法:
阻尼材料
不同的材料提供不同的振动隔离特性:
橡胶和弹性体
- 橡胶垫圈:用于安装飞控的简单隔离方式。我仍然在预算有限的构建中使用这些,尽管它们的效果不如更高级的选择。
- O型圈:对某些安装配置很有效。我使用适当尺寸的O型圈为带有安装孔的组件创建了自定义减震系统。
- 弹性体球:在多个方向提供隔离。这些非常适合飞控,但需要安全的容器以防止在撞击过程中弹出。
- 邵氏硬度等级:影响阻尼特性的硬度测量。通过测试,我发现30-40A的邵氏硬度最适合典型5英寸构建中的飞控,而50-60A更适合较大、功率更大的无人机。
- 个人经验:虽然很基本,但橡胶解决方案耐用可靠。我手头有各种硬度的橡胶,以匹配不同的振动特性。
泡沫和凝胶
- 聚氨酯泡沫:重量轻,具有良好的阻尼特性。我将其用于相机支架和轻质组件。
- 记忆泡沫:出色的振动吸收能力,但耐用性较差。我已成功地将其用于短期解决方案,但发现它降解太快,不适合永久安装。
- 硅胶垫:出色的隔离特性和良好的耐用性。这些已成为我在大多数构建中安装飞控的标准。
- 背胶泡沫:方便定制应用。我将其裁剪成形状,用于减震特定组件,如视频发射器和接收器。
- 个人经验:凝胶垫为飞控提供了最佳的性能和便利性组合。我通常每6-12个月更换一次,因为它们会随着时间的推移变硬。

高级材料
- Sorbothane:专业级减震材料。我在高端电影拍摄构建中使用它,在那里最大限度地抑制振动至关重要。
- Kyosho Zeal:专业RC减震垫。这些在高性能赛车构建中的飞控上表现非常出色。
- 3M减震片:用于减少框架共振的粘性减震材料。我将这些应用于碳纤维框架的框架臂和板上,以减少振动的传播。
- 复合减震器:具有不同特性的材料组合。我为特定应用创建了定制的分层减震器,结合了针对不同频率范围的材料。
- 个人经验:高级材料成本更高,但提供卓越的性能。对于专业应用,投资这些材料在镜头质量和飞行可靠性方面获得了丰厚的回报。

安装方法
减震材料的实施方式显著影响其性能:
软安装
- 三明治安装:组件悬挂在阻尼材料之间。我对大多数飞控采用这种方法,在板的上方和下方都有阻尼材料。
- 角落安装:仅在安装点进行隔离。这适用于较大的组件,完全的三明治安装不太实用。
- 悬挂安装:组件悬挂在弹性材料上。我用这种方法安装相机,效果非常好,但需要仔细实施以保持对准。
- 压缩安装:组件由压缩的阻尼材料固定。这提供了极好的隔离,但在激烈的机动中可能允许过度移动。
- 个人经验:不同的安装方法适用于不同的组件。我通常对飞控使用三明治安装,对相机和视频发射机使用角落安装。

带阻尼的硬安装
- 约束层阻尼:在组件和刚性安装之间夹一层吸振材料。我对需要精确对准的组件使用这种方法。
- 质量阻尼:增加质量以减小振动幅度。我通过在安装结构上增加小配重,成功地在相机上使用了这种技术。
- 调谐质量阻尼器:专门加权的元件,用于抵消特定的振动频率。我已经尝试用这些来解决特别棘手的共振问题。
- 个人经验:当软安装不实用时,这些方法效果很好。我经常对GPS模块使用约束层阻尼,因为位置稳定性很重要。
混合方法
- 选择性频率隔离:结合材料以针对特定的频率范围。我最有效的构建使用不同的材料来解决不同的振动源。
- 针对组件的解决方案:根据每个组件的需求定制阻尼方法。我发现没有一种方法适用于所有组件。
- 自适应系统:在不同的飞行条件下,阻尼会有不同的响应。我的高级构建包括阻尼系统,在悬停和高速飞行期间提供不同的特性。
- 个人经验:混合方法产生了我最好的结果。了解每个组件对不同振动类型的敏感度,可以制定针对性的解决方案。
| 材料 | 最适合 | 耐用性 | 有效性 | 重量 | 我的偏好 |
|---|---|---|---|---|---|
| 橡胶垫圈 | 预算构建,基本隔离 | 高 | 中等 | 低 | 良好的入门选择 |
| 硅胶垫 | 飞控,通用 | 中等 | 高 | 低 | 大多数构建的首选 |
| Sorbothane | 专业构建,相机 | 高 | 非常高 | 中等 | 最适合电影无人机 |
| O型圈 | 定制安装方案 | 高 | 中等 | 非常低 | 非常适合GPS模块 |
| 泡沫胶带 | 轻型组件,VTX | 低 | 中等 | 非常低 | 快速解决方案和维修 |
| 3M阻尼片 | 机架减振 | 非常高 | 高 | 中等 | 对碳纤机架值得投资 |
基于我在数十个构建中的测试和经验对减振材料进行比较。
针对组件的阻尼技术
不同的无人机组件需要专门的减振方法:
飞控阻尼
你无人机控制系统的核心需要仔细的振动隔离:
- 堆叠安装:现代FC堆叠受益于组件之间的隔离。我在堆叠中的每块板之间使用薄硅胶垫,以防止振动传递。
- 最佳硬度:将阻尼材料硬度与无人机特性相匹配。对于我的5英寸自由式构建,35A硬度的硅胶提供了隔离和稳定性的最佳平衡。
- 安装压力:适当的螺栓张力显著影响阻尼性能。我开发了一种"刚好够紧"的方法——拧紧螺栓直到阻尼材料刚开始压缩。
- 方向考虑:一些飞控在特定方向安装时性能更好。我发现将FC安装时敏感的陀螺仪芯片垂直于电机臂,通常可以减少振动问题。
- 个人经验:经过数百次构建,我已经确定了一个标准方法:使用尼龙隔离柱和硅胶垫,张力刚好足以防止移动而不压缩硅胶。这提供了出色的隔离,同时保持物理稳定性。

相机阻尼
FPV相机和HD相机都受益于适当的减振:
FPV相机减震
- TPU支架:3D打印的热塑性聚氨酯支架提供出色的减震效果。我在设计时会特意加入灵活区域,以吸收振动,同时保持相机对准。
- 泡沫垫:在相机和支架之间战略性地放置泡沫。我在接触点使用薄条泡沫,而不是完全包裹相机。
- 安装张力:在安全性和隔离性之间取得平衡。太紧会直接传递振动;太松会导致相机在机动时过度移动。
- 个人经验:我最有效的FPV相机设置是使用半刚性TPU支架,在接触点使用2mm泡沫垫,并使用硅胶O型圈作为安装螺丝。

高清相机减震
- 云台系统:机械或电子稳定。对于专业拍摄,我使用带有自己减震系统的轻型云台。
- 配重减震:平衡重量分布以最小化振动影响。我发现,正确平衡的相机支架会显著减少振动。
- 多层隔离:结合不同的减震材料进行全面隔离。我的电影搭建使用三层方法:机架隔离、支架隔离和相机到支架隔离。
- 个人经验:对于非云台高清相机,我通过软硅胶安装来应对高频振动,并通过加权阻尼来应对低频移动,从而获得最佳效果。
GPS和导航传感器
位置感应组件需要稳定安装,并适度隔振:
- 延伸支架:将GPS远离主要振动源。我的GPS杆在底部结合减震材料,以防止振动传递。
- 碳纤维隔离:碳纤维板会有效传递振动。没有减震隔离,我从不将GPS直接安装在碳纤维上。
- 磁性考虑:确保电机和电源线不会干扰罗盘。除了减震外,我的GPS支架还包括磁隔离。
- 个人经验:对于GPS模块,我发现较硬的减震材料(50-60A硬度)在提供足够的减震隔离的同时,还能提供更好的位置稳定性。

视频发射机减震
经常被忽视的是,VTX单元也可以从减震中受益:
- 热量考虑:在减震和热管理之间取得平衡。我使用硅胶安装,与机架保持一定的热接触,以便散热。
- 电缆应变消除:防止通过电缆传递振动。我所有的VTX安装都包括电缆连接点的软安装。
- 天线支架隔离:减少向天线传递的振动。我使用柔性天线支架来吸收振动,而不是将其传递给天线。
- 个人经验:在经历了由振动引起的连接器问题导致的视频问题后,我现在对所有VTX单元进行软安装,特别注意隔离连接器区域。
电池和电源系统减震
减少电源传输组件中的振动可提高可靠性:
- 电池垫材料:电池下方的泡沫或硅胶垫。我在所有电池下方使用3mm闭孔泡沫,以减少双向振动传递。
- 配电板减震:尽可能软安装PDB。在PDB与飞控分离的搭建中,我使用薄硅胶垫进行安装。
- 电缆管理:固定电线以防止振动引起的磨损。在高振动区域,我使用软硅胶绑带而不是刚性扎带进行电缆管理。
- 个人经验:电池减震有双重目的——它可以保护电池免受机架振动的影响,并防止电池的质量影响机架共振。我的标准方法是使用闭孔泡沫和带有硅胶背衬的魔术贴。
安装最佳实践
正确的实施对于有效的减震至关重要:
准备和规划
- 振动分析:在应用解决方案之前识别具体问题。我在实施阻尼之前对所有新构建进行基线振动测试。
- 组件映射:了解哪些组件需要什么类型的隔离。我根据每个构建的组件和预期用途创建特定的阻尼计划。
- 材料选择:为每个应用选择适当的材料。我的零件箱包括至少五种不同的阻尼材料,以满足各种需求。
- 重量考虑:在有效阻尼与重量限制之间取得平衡。对于赛车构建,我计算阻尼解决方案的重量影响,并优先考虑最关键的组件。
- 个人经验:在构建之前规划阻尼策略可以节省大量时间和返工。我将阻尼方法草图作为初始构建规划的一部分。
安装技术
- 清洁表面:确保阻尼材料正确粘附。在应用带胶阻尼材料之前,我用异丙醇清洁所有接触面。
- 压缩控制:管理阻尼材料的压缩量。我使用特定高度的尼龙垫片来控制阻尼材料的压缩。
- 分层方法:结合材料以提高性能。我的一些构建使用不同材料的层来解决各种频率范围。
- 温度考虑:考虑材料在不同条件下的性能。我为在极端温度下操作的无人机选择不同的阻尼解决方案。
- 个人经验:安装的精确度会产生显著差异。我使用数字卡尺测量和切割阻尼材料,以获得一致的结果。
常见安装错误
我犯过和观察到的会影响阻尼效果的错误:
- 过度拧紧:过度压缩阻尼材料会降低其有效性。我为大多数安装螺栓制定了"初始压缩后再转四分之一圈"的规则。
- 固定不足:固定不足会导致过度移动。在经历了一次飞行控制器在飞行中改变位置后,我确保所有阻尼组件都有移动限制器。
- 应用不一致:不均匀的阻尼会产生新的振动问题。我确保阻尼材料均匀应用和压缩。
- 忽略共振传递:阻尼一个组件可能会将共振转移到其他组件。我采用整体方法进行阻尼,考虑一个区域的变化如何影响其他区域。
- 材料干扰:某些阻尼材料可能会与无人机组件发生反应。在一块泡沫垫靠着一个发热的电子速度控制器部分溶解后,我吸取了这个教训。
维护和监控
- 定期检查:检查阻尼材料的磨损或退化情况。我在例行维护期间检查所有阻尼组件。
- 更换时间表:某些材料会随着时间的推移而失去效力。根据使用情况,我每6-12个月更换一次硅胶垫。
- 碰撞后评估:评估碰撞后的阻尼系统。我制定了一个快速的碰撞后检查清单,其中包括检查所有阻尼组件。
- 持续振动监测:使用黑匣子日志跟踪振动随时间的变化。这有助于我在问题导致问题之前识别出正在出现的问题。
- 个人经验:主动维护阻尼系统可防止性能下降。我记录阻尼材料的安装时间,并安排更换。
测试和调整振动阻尼
系统评估确保最佳振动管理:
初始测试
- 逐个电机测试:隔离振动源。我单独测试每个电机,以识别产生异常振动的电机。
- 油门扫描测试:识别整个油门范围内的共振点。这可以揭示产生有问题振动的特定油门位置。
- 敲击测试:评估振动如何在机架中传播。我轻轻敲击不同的机架部件,观察振动如何传播到敏感部件。
- 基线记录:在阻尼之前建立振动特性。我在实施阻尼解决方案之前捕获黑匣子日志,以提供比较基线。
- 个人经验:有条不紊的测试可以节省时间,针对特定问题。我的测试协议大约需要30分钟,但可以节省数小时的后续故障排除时间。
评估方法
- 黑匣子分析:检查陀螺仪数据以获取振动特征。我在陀螺仪轨迹中寻找指示不同类型振动问题的特定模式。
- 视频质量评估:评估镜头中的振动伪影。我有一个标准的测试飞行模式,可以帮助识别与振动相关的视频问题。
- A/B对比:在相同条件下测试不同的阻尼解决方案。我经常构建测试装置,可以快速更换阻尼解决方案进行直接比较。
- 频率分析:使用FFT工具识别有问题的频率范围。这种高级技术帮助我用适当的材料针对特定的振动频率。
- 个人经验:结合主观和客观评估方法可以提供最完整的画面。我同时使用数据分析和飞行感觉来评估阻尼效果。
迭代改进
- 逐步改变:一次修改一个元素。这种有条不紊的方法让我能够准确识别哪些变化带来了好处。
- 文档记录:记录变更及其影响。我的构建日志包括有关阻尼修改和性能变化的详细说明。
- 材料实验:测试不同的硬度和材料。我维护一个具有不同属性的阻尼材料集合用于实验。
- 组合方法:找到不同阻尼方法之间的协同作用。我一些最有效的解决方案结合了多种技术,解决了振动特性的不同方面。
- 个人经验:在迭代过程中保持耐心会产生最佳结果。我最精致的构建经历了3-5次振动阻尼优化迭代。
高级阻尼技术
对于需要特殊振动管理的情况:
谐波阻尼
- 调谐质量阻尼器:添加特定重量以抵消共振频率。我使用这种技术来解决相机支架中顽固的共振问题。
- 频率特定材料:选择针对特定频率范围的阻尼材料。我的专业构建使用不同的材料来解决电机频率与机架共振问题。
- 共振映射:识别并解决机架共振点。我开发了一种技术,用于映射机架中的共振节点并应用针对性阻尼。
- 个人经验:谐波阻尼方法需要更多努力,但可以解决基本方法无法解决的问题。我将这些技术保留给性能证明额外时间投入合理的专业应用。
结构阻尼
- 机架阻尼层:在机架本身添加吸振材料。我在碳纤维机架内部应用薄阻尼片以减少共振。
- 电机软安装:将电机与机架隔离。对于极其敏感的振动应用,尽管复杂,我还是使用专门的电机软安装。
- 机臂阻尼:减少通过机架机臂的振动传递的技术。我在空心机架机臂内部试验了内部阻尼材料,取得了出色的效果。
- 个人经验:结构阻尼从源头解决振动问题。虽然实施起来更复杂,但这些技术可以减少对大量部件阻尼的需求。
主动阻尼系统
- 电子振动抵消:使用飞控滤波器抵消振动。我仔细调整软件滤波器以补充物理阻尼措施。
- 自适应阻尼:适应不同飞行条件的系统。我的高级构建包括在不同飞行阶段提供不同特性的阻尼解决方案。
- 基于反馈的系统:使用传感器数据动态调整阻尼。虽然是实验性的,但我已经测试了根据实时振动分析修改滤波器参数的系统。
- 个人经验:主动系统代表了振动管理的前沿。我将这些与物理阻尼相结合,用于要求最苛刻的应用。
我的经验之谈
经过多年完善振动阻尼方法,以下是我一些来之不易的见解:
- 平衡你的螺旋桨:这个简单的步骤可以消除一个主要的振动源。我使用磁力平衡器来平衡所有的螺旋桨,仅通过平衡就可以将某些振动频率降低高达70%。
- 重心原理:将飞控安装在无人机重心的尽可能近的位置。我发现安装在重心位置的飞控在激进的机动动作中会经历明显更少的振动。
- 硬度等级:对飞控使用较软的材料(30A),对相机使用中等硬度(50A),对GPS和其他位置敏感的组件使用较硬的材料(70A)。这种针对性的方法可以满足每个组件的特定需求。
- 尼龙的优势:使用尼龙螺栓和支架来安装振动敏感的组件。除了重量优势,我发现它们传递的振动明显少于金属硬件。
- 双面胶带技巧:对于减震系统的快速现场修复,高质量的双面泡沫胶带可以创造奇迹。我在现场工具包中保存3M VHB胶带,用于紧急减震修复。
- 共振测试:通过在增加油门的同时轻轻触摸机架来识别机架共振。我可以用指尖感觉到共振点,并标记要在关键机动动作中避免的油门位置。
- 布线管理因素:固定电线而不传递振动。我用平缓的曲线而不是紧密的弯曲来布线,并使用柔软的硅胶绑带而不是刚性的扎带。
- 温度效应:减震材料在不同温度下表现不同。我在寒冷天气飞行时选择较软的硬度,在炎热条件下选择较硬的选项。
- 抗撞原则:设计减震系统以在撞击中幸存。我为飞控减震使用限位设计,防止飞控在撞击过程中被弹出。
- 重量分布规则:均匀分布重量以最小化引起振动的不平衡。我在所有三个轴上平衡我的构建,有时添加小重量以实现完美平衡。
常见问题:关于无人机减震的常见问题
所有无人机都需要减震吗?
根据我对数百个构建的经验:
- 竞速无人机:最小但战略性的减震是有益的。我专注于飞控隔离,同时在不太关键的组件上接受一些振动以节省重量。
- 自由式无人机:适度的减震可以提高性能和视频质量。我的自由式构建使用全面的飞控减震和适度的相机隔离。
- 电影无人机:广泛的减震对于高质量的镜头至关重要。这些构建得到了我最全面的振动管理,通常包括多种减震技术。
- 长航时无人机:针对导航组件的重点减震可提高可靠性。我优先考虑GPS和指南针隔离以及飞控减震。
- 微型无人机:由于空间和重量限制而采用简化的方法。对于这些,我专注于使用最轻的有效材料进行基本的飞控隔离。
每个无人机都可以从某种程度的振动管理中受益,但程度和重点应与无人机的用途和性能要求相匹配。
振动问题有哪些迹象?
我寻找的表明振动问题的指标:
- 飞行性能:飞行过程中的振荡、抽搐或摇摆。我特别注意油门变化时和保持稳定油门时的行为。
- 黑匣子数据:有规律的嘈杂陀螺仪轨迹。我寻找一致的高频噪声或在特定油门位置的特定尖峰。
- 视频质量:镜头中的"果冻"效应、微抖动或水平线。不同的振动问题会产生独特的视觉伪影,我已经学会识别。
- 异常声音:高音调的呜呜声或不规则的电机声音。经过数百次构建后,我的耳朵已经对振动问题的微妙声音变得敏感。
- 发热组件:电子设备运行温度高于正常水平。过度振动会导致飞控和电调的功耗和热量增加。
如何选择合适的减震材料?
我根据应用选择的过程:
- 飞控:大多数构建使用硅胶凝胶垫(30-40A硬度)。具体的硬度取决于无人机的大小和动力——更大、更强大的构建需要稍微更硬的材料。
- 相机:FPV相机使用TPU支架和战略性泡沫垫;高清相机使用多层系统。具体方法取决于相机重量和飞行风格。
- GPS/指南针:较硬的材料(50-60A),在提供稳定性的同时还提供振动隔离。位置精度受益于更稳定的安装和适度的振动隔离。
- 一般组件:较轻的组件使用粘性泡沫;较重的组件使用硅胶支架。我将减震材料的强度与组件的重量和振动敏感性相匹配。
- 机架减震:约束层材料,如3M减震片,应用于碳纤维元件。这些材料在应用于确定为共振点的区域时效果最佳。
软件能否取代物理减震?
根据我对各种飞控固件的测试:
- 不完全:软件滤波有帮助但有局限性。我从未仅通过软件实现过适当物理减震所能实现的效果。
- 互补方法:最佳效果来自将物理减震与适当的软件滤波相结合。我根据通过物理减震的残余振动来调整滤波器。
- 滤波权衡:激进的滤波会引入延迟并降低控制响应性。找到正确的平衡需要同时了解物理减震和软件能力。
- 动态滤波:现代飞控提供适应不断变化条件的动态滤波。当物理减震已经解决了最严重的振动源时,这些效果最好。
- 我的方法:首先实施有效的物理减震,然后微调软件滤波器以解决任何剩余问题。这提供了最佳性能而不牺牲响应性。
减震材料应该多久更换一次?
根据我的经验制定的维护计划:
- 硅胶垫:在正常使用的情况下每6-12个月更换一次。这些垫子会逐渐变硬并失去效用,具体时间取决于受热和紫外线的影响程度。
- 泡沫材料:每3个月检查一次,根据需要进行更换。与硅胶相比,泡沫通常会更快地永久压缩并失去减震效果。
- O型圈和垫圈:如果出现可见变形或开裂,请更换。这些橡胶部件通常可以使用1-2年,但应定期检查。
- TPU打印支架:如果柔韧性发生变化或出现裂纹,请更换。设计良好的TPU支架如果没有在撞击中损坏,可以在无人机的整个使用寿命内使用。
- 撞击后:在发生严重撞击后,务必检查所有减震部件。撞击可能会以不易立即发现的方式损坏减震材料。
结论
有效的减震方案是无人机制造和调试中最容易被忽视的方面之一。通过多年的实验和数百次制造,我发现适当的振动管理通常比昂贵的部件升级对性能产生更显著的影响。
减震的艺术和科学在不断发展,新材料和新技术不断涌现。不变的是基本方法:识别振动源,了解其特性,选择适当的减震方案,正确实施,并系统地测试结果。
无论你是在制造一架每克都很重要的竞速无人机,一架需要应对激进机动的自由式四轴飞行器,还是一个用于专业拍摄的电影平台,适当的减震都会提高性能、可靠性和效果。具体方法会根据无人机的用途和部件而有所不同,但原理是相同的。
我学到的大部分经验都是通过反复试验得来的,有时还涉及无人机坠毁和部件损坏的代价。希望本指南能帮助你避免一些痛苦的教训,更快地取得更好的效果。请记住,振动管理是一个迭代过程;不要害怕根据结果进行实验、测量和改进方法。


