无人机遥控协议概述

无线电控制协议是允许您的发射器与无人机通信的数字语言。经过多年在不同飞行条件下测试各种遥控系统,我了解到理解这些协议对于优化性能和可靠性至关重要。本综合指南探讨了当今可用的主要遥控协议及其技术特点,特别关注通信标准而非实现它们的硬件生态系统。
遥控协议简介
当我们谈论无人机无线电控制系统时,我们通常关注物理发射器和接收器。然而,真正决定性能的是底层协议——定义数据如何打包、传输和解释的通信标准。可以将协议视为不同的语言:虽然所有语言都允许通信,但在特定情况下,有些语言比其他语言更高效、精确或健壮。
我仍然记得早期使用基本 PWM 接收器飞行的日子,每个通道都需要单独的线路,信号干扰是一个持续的问题。向现代数字协议的演进已经改变了遥控系统的可靠性和功能,实现了曾经无法想象的特性。
遥控协议的演进
遥控通信在过去几十年中发生了巨大变化:
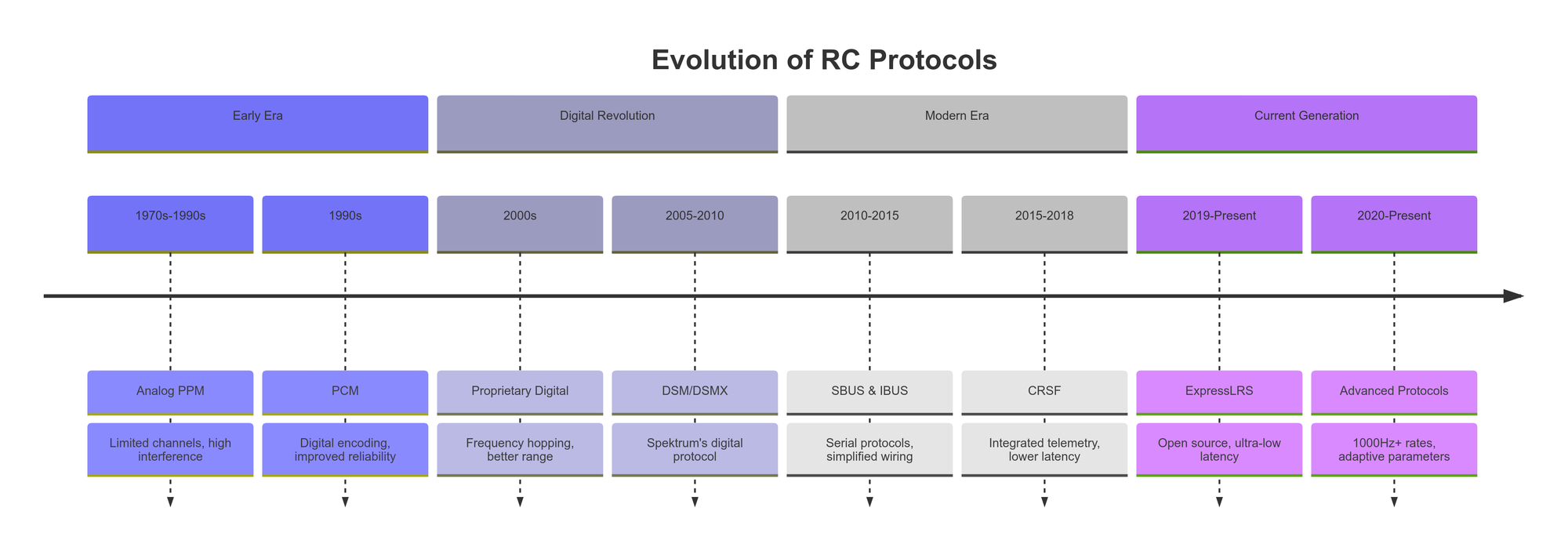
- 早期(1970年代-1990年代):简单的模拟 PPM(脉冲位置调制),通道有限,易受干扰。
- 数字革命(2000年代):引入 PCM(脉冲编码调制)和早期专有数字协议,提高了可靠性和功能。这是一个游戏规则改变者——突然之间,空中故障变得少见多了。
- 现代时代(2010年代):开发了复杂的串行协议,如 SBUS、CRSF 和 iBUS,提供多个通道、遥测和高级功能。
- 当前一代(2020年代):先进的协议以前所未有的刷新率和范围推动性能的极限。协议设计的技术改进实现了几年前消费设备无法实现的性能。
为什么协议很重要
您选择的协议会影响飞行体验的几个关键方面:
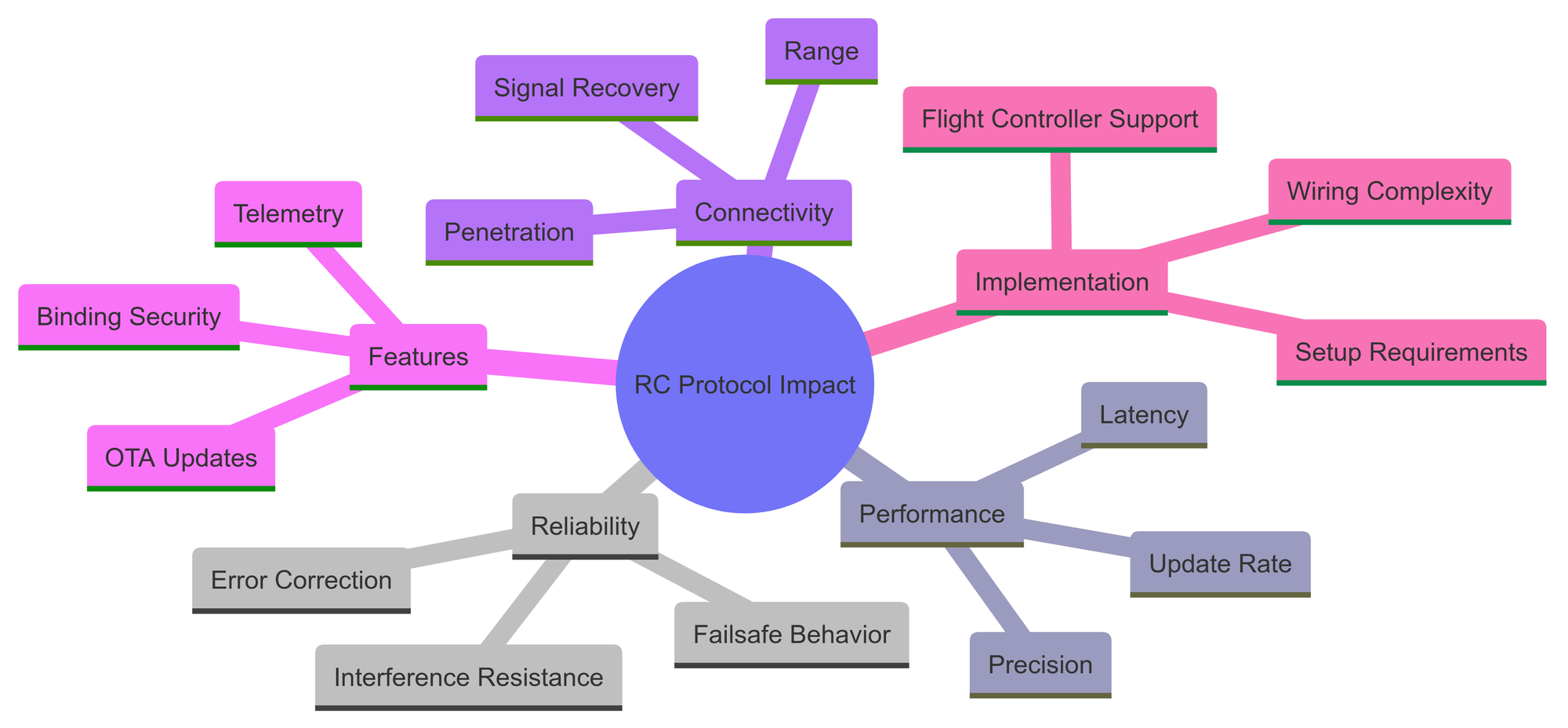
- 延迟:摇杆动作转化为无人机响应的速度
- 范围:在保持可靠控制的情况下可以飞行的距离
- 可靠性:链路对干扰和信号丢失的抵抗能力
- 功能:可用的附加功能(遥测、空中更新等)
- 硬件要求:使用协议所需的设备
我亲身体验了切换协议如何改变无人机的性能。正确的协议可以在无人机感觉迟钝和无响应与感觉像是您思想的延伸之间产生差异。
了解协议基础
在深入研究特定协议之前,了解区分它们的技术概念很重要。
关键技术概念
信号调制
信息如何编码到载波上:

- 跳频扩频(FHSS):根据预定模式快速切换频率,提高抗干扰能力。大多数现代协议都使用某种形式的 FHSS。
- 直接序列扩频(DSSS):将信号扩展到宽带宽,使其能够抵抗窄带干扰。在无人机应用中不太常见。
- 自适应频率灵活性:通过改变频率模式主动检测和避免干扰的高级系统。我发现这些在城市环境中飞行时特别有价值,因为那里有不可预测的射频噪声。
数据速率和数据包结构
信息如何打包和传输:
| 概念 | 描述 | 对性能的影响 |
|---|---|---|
| 数据包速率 | 每秒发送的数据包数量(Hz) | 速率越高 = 延迟越低但范围缩小 |
| 数据包大小 | 每次传输的信息量 | 数据包越大 = 数据越多但传输时间更长 |
| 纠错 | 检测和恢复错误的方法 | 更强大的纠错 = 可靠性更好但延迟增加 |
| 通道分辨率 | 控制值的精度(位) | 分辨率越高 = 控制越精确但数据包更大 |
| 帧结构 | 数据包如何构建和识别 | 高效的帧结构 = 开销更低,性能更好 |
我广泛尝试了不同的数据包速率,发现最佳设置因飞行风格而有很大差异。对于竞速,我更喜欢 500Hz 或更高的速率以获得最小延迟,而对于长距离巡航,50Hz 或更低可以提供更好的范围,同时仍然具有可接受的响应性。
链路预算
无线电链路的总功率平衡:

了解链路预算对我的长距离构建至关重要。我了解到,相比优化天线或提高接收机灵敏度,将发射功率提高一倍所增加的范围要少得多。
协议 vs. 射频系统 vs. 物理连接
区分相关但不同的概念很重要:
| 概念 | 描述 | 示例 |
|---|---|---|
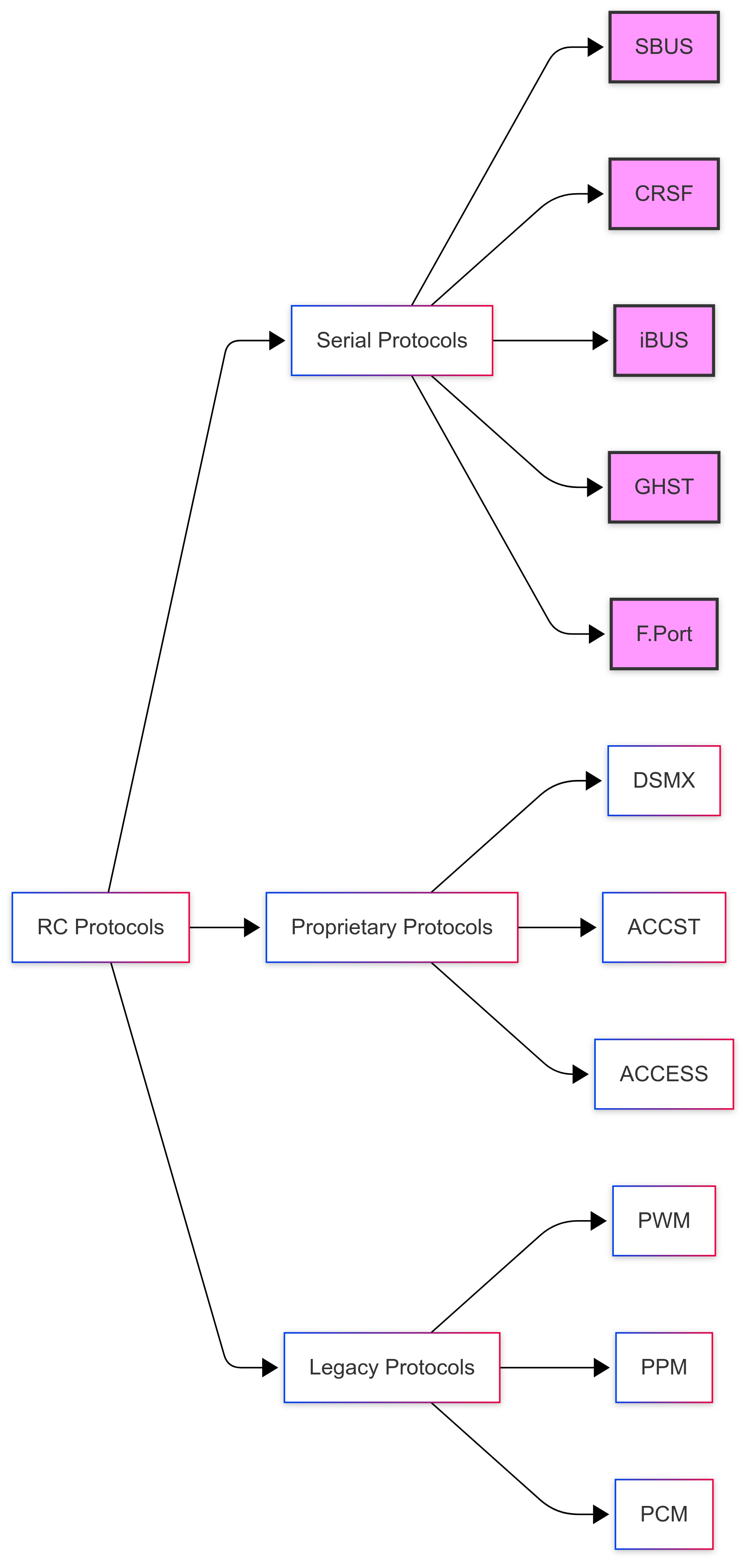
| 协议 | 定义数据如何构成的通信标准 | CRSF、SBUS、iBUS、GHST |
| 射频系统 | 用于传输信号的射频技术 | ExpressLRS、Crossfire、ACCST、DSMX |
| 物理连接 | 接收机如何连接到飞控 | UART、PWM、I2C、SPI |
这种区分很重要,因为相同的协议(例如 CRSF)可以被不同的射频系统(例如 TBS Crossfire 和 ExpressLRS)使用,而相同的射频系统有时可以支持多种协议。
主要遥控协议
根据我广泛的测试和实际经验,让我们来看看无人机世界中最重要的协议。
协议比较概述
SBUS(串行总线)
由 Futaba 开发并被 FrSky 等广泛采用,SBUS 多年来一直是标准。
技术特点
- 数据速率:100,000 bps
- 更新速率:通常为 9ms(111Hz)
- 通道:最多 16 个比例通道 + 2 个数字通道
- 延迟:端到端约 14ms(典型)
- 信号类型:反相 UART 串行
- 回传:SBUS 本身不包含(需要单独连接)
优势
- 广泛兼容性:几乎所有飞控都支持
- 简单性:与飞控的单线连接
- 可靠性:在无数构建中经过验证
局限性
- 信号反相:F1/F3 飞控需要反相器(F4 及更新的有内置反相器)
- 中等延迟:不如新协议响应迅速
- 无集成回传:需要单独连接回传数据
多年来我在数十个构建中使用过 SBUS,它仍然是一个可靠的选择。我特别欣赏它的通用兼容性——我从未遇到过不能使用 SBUS 的飞控。
CRSF(Crossfire 射频)
由 Team BlackSheep 为其 Crossfire 系统开发,后来被 ExpressLRS 采用,CRSF 已成为高性能遥控链路的黄金标准。
技术特点
- 数据速率:420,000 bps
- 更新速率:可变,从 50Hz 到 1000Hz(取决于实现)
- 通道:最多 12 个通道
- 延迟:低至 2ms(在 1000Hz 时)
- 信号类型:非反相 UART 串行
- 回传:集成双向通信
优势
- 低延迟:极其灵敏的控制
- 集成回传:在同一连接中提供全面的数据反馈
- 高级功能:支持 LUA 脚本、空中更新、模型匹配
- 灵活实现:被具有不同特性的多个射频系统使用
局限性
- 复杂性:更多设置选项可能让初学者不知所措
- 硬件要求:需要有可用 UART 的飞控
- 实现差异:使用 CRSF 的不同系统可能具有不同的功能
自 2018 年以来,CRSF 一直是我在重要构建中的首选协议。低延迟、集成回传和高级功能的结合使其难以超越。该协议的设计允许在广泛的应用中实现出色的性能。
iBUS
由 FlySky 开发,iBUS 提供了一个带有集成回传的简单串行协议。
技术特点
- 数据速率:115,200 bps
- 更新速率:通常为 8ms(125Hz)
- 通道:最多 14 个通道
- 延迟:端到端约 12ms(典型)
- 信号类型:非反相 UART 串行
- 回传:集成双向通信
优势
- 无信号反相:直接适用于所有飞控
- 集成回传:控制和数据的单线解决方案
- 简单性:设置简单,配置最少
局限性
- 生态系统有限:主要与 FlySky 设备一起使用
- 高级功能较少:与 CRSF 或 GHST 相比
- 不太常见:社区支持和开发较少
我在几个预算构建中使用过 iBUS,它在这个价位上表现出色。非反相信号在使用旧飞控时特别方便,无需 SBUS 所需的信号反相器。
GHST(Ghost)
由 ImmersionRC 为其 Ghost 系统开发,GHST 在性能特性方面提供了出色的平衡。
技术特点
- 数据速率:420,000 bps
- 更新率:可变,从50Hz到250Hz
- 通道:最多12个通道
- 延迟:低至5ms
- 信号类型:非反相UART串行
- 回传:集成双向通信
优势
- 非常低的延迟:出色的响应性
- 良好的范围:优于平均水平的距离能力
- 干净的实现:设计良好的协议,有效利用带宽
- 开放文档:透明的协议规范
局限性
- 采用有限:没有CRSF或SBUS那么广泛使用
- 硬件选择较少:兼容设备的选择有限
- 社区开发较少:工具和资源的生态系统较小
我广泛测试了GHST,对其技术实现印象深刻。该协议在延迟和范围之间取得了极佳的平衡,尽管它还没有获得一些竞争对手的市场份额。
DSMX
由Spektrum开发,DSMX在美国和即飞模型中广泛使用。
技术特点
- 数据速率:专有
- 更新率:11ms (91Hz) 或 22ms (45Hz)
- 通道:最多12个通道
- 延迟:~14ms (11ms帧率) 或 ~25ms (22ms帧率)
- 信号类型:专有串行
- 回传:在大多数实现中受限
优势
- 在即飞模型中广泛使用:在即飞无人机中常见
- 强大的美国市场存在:在北美得到良好支持
- 对频简单:简单的接收器对频过程
局限性
- 封闭的生态系统:专有协议,第三方支持有限
- 较高的延迟:不如新协议响应迅速
- 有限的回传:与CRSF或GHST相比较为基础
虽然我没有像其他协议那样广泛使用DSMX,但我使用过几架配备Spektrum的无人机。该协议可靠,但与新的替代方案相比感觉有些过时,特别是在延迟和功能集方面。
F.Port
由FrSky开发,F.Port将SBUS控制和SmartPort回传合并到一个连接中。
技术特点
- 数据速率:115,200 bps
- 更新率:通常为9ms (111Hz)
- 通道:最多16个比例通道 + 2个数字通道
- 延迟:~14ms端到端(典型)
- 信号类型:半双工UART
- 回传:集成双向通信
优势
- 单线解决方案:结合控制和回传
- 兼容性:与现有的FrSky生态系统兼容
- 资源效率:释放飞控上的UART端口
局限性
- FrSky专用:仅限于FrSky设备
- 设置复杂:可能难以正确配置
- 人气下降:被新协议取代
我将几个FrSky构建从单独的SBUS/SmartPort转换为F.Port。单线解决方案很优雅,尽管我发现设置比预期更麻烦,通常需要更新接收器和发射器的固件。
FrSky协议
由于在无人机社区中的广泛使用,FrSky开发了几种值得特别提及的协议。
ACCST(高级连续变频技术)
FrSky最初的数字协议,获得了广泛采用:
- 数据速率:可变
- 更新率:通常为9ms (111Hz)
- 通道:最多16个通道(D16模式)
- 延迟:~14ms端到端(典型)
- 信号类型:2.4GHz FHSS
- 回传:通过单独的SmartPort连接提供
变体:
- D8:与旧接收器兼容的8通道模式
- D16:具有增强功能的16通道模式
- LR12:通道减少的长距离变体
我使用ACCST D16多年,发现它是日常飞行的可靠协议。虽然不如新选项先进,但它在各种飞控上提供了一致的性能和良好的兼容性。
ACCESS(高级通信控制,提升的扩频)
FrSky在2019年推出的新协议,用于替代ACCST:
- 数据速率:高于ACCST
- 更新率:通常为9ms (111Hz)
- 通道:最多24个通道
- 延迟:~12-14ms端到端(典型)
- 信号类型:具有增强安全性的2.4GHz FHSS
- 回传:集成,带宽更高
主要特点:
- 增强安全性:使用唯一ID绑定以防止未经授权的连接
- 空中更新:能够从发射器更新接收器固件
- 频谱分析:内置频率扫描以避免干扰
- 智能匹配:通过接收器注册简化对频过程
我使用ACCESS的经历喜忧参半。虽然增强的安全功能和OTA更新很有价值,但由于兼容性问题,从ACCST的过渡令人困惑。正确设置后,ACCESS在范围和可靠性方面比ACCST略有改善,但对于典型的飞行场景而言,差异并不显著。
传统协议
虽然在现代无人机中不太常见,但为了历史背景,这些协议值得了解:
PWM(脉冲宽度调制)
- 特点:每个通道一根线,直接舵机控制
- 局限性:布线笨重,通道有限,易受干扰
- 当前应用:除了直接舵机连接,现代无人机中很少使用
PPM(脉冲位置调制)
- 特点:单线多通道,模拟信号
- 局限性:通道有限(通常为8个),中等延迟
- 当前应用:偶尔出现在基础或较旧的设备中
PCM(脉冲编码调制)
- 特点:控制信号的数字编码
- 优点:比PPM更好的错误检测
- 当前应用:在很大程度上被新的数字协议取代
协议性能比较
在各种条件下进行广泛测试后,以下是主要协议在关键性能指标方面的比较。
延迟比较
从摇杆移动到飞控响应的测量结果:
| 协议 | 最小延迟 | 典型延迟 | 备注 |
|---|---|---|---|
| ExpressLRS | 2ms | 4-10ms | 随数据包速率变化(1000Hz-50Hz) |
| GHST | 5ms | 7-12ms | 随数据包速率变化(250Hz-50Hz) |
| CRSF (Crossfire) | 6ms | 10-15ms | 随数据包速率变化(150Hz-50Hz) |
| iBUS | 10ms | 12-15ms | 相对一致 |
| F.Port | 12ms | 14-16ms | 与SBUS类似 |
| SBUS | 12ms | 14-16ms | 相对一致 |
| DSMX | 14ms | 14-25ms | 取决于帧速率设置 |
根据我的经验,延迟差异在5ms左右就会变得明显。以500Hz飞行ExpressLRS感觉比SBUS明显更灵敏,特别是在快速机动和修正期间。
范围比较
基于我在可比输出功率(100mW)和标准天线下的测试:
| 协议 | 典型范围 | 最大范围 | 备注 |
|---|---|---|---|
| ExpressLRS 2.4GHz (50Hz) | 5-10km | 30km+ | 出色的范围延迟比 |
| TBS Crossfire 900MHz | 5-10km | 40km+ | 长距离的行业标准 |
| ExpressLRS 900MHz (25Hz) | 10-20km | 50km+ | 当前范围冠军 |
| GHST 2.4GHz | 3-5km | 10km+ | 范围和延迟的良好平衡 |
| FrSky R9 900MHz | 3-5km | 15km+ | 良好的范围,但不如新系统可靠 |
| FrSky ACCST 2.4GHz | 1-2km | 5km | 足以满足大多数飞行需求 |
| FlySky AFHDS 2A | 0.5-1.5km | 3km | 有限但足以满足视线内飞行 |
| DSMX | 1-2km | 3km | 足以满足大多数飞行需求 |
这些范围假设在最佳条件下具有清晰的视线。实际范围会受到障碍物、干扰、天线位置和其他因素的影响。
可靠性比较
根据我在各种环境中的飞行经验:
| 协议 | 抗干扰能力 | 失控保护可靠性 | 整体稳健性 |
|---|---|---|---|
| ExpressLRS | 优秀 | 优秀 | 优秀 |
| TBS Crossfire | 优秀 | 优秀 | 优秀 |
| GHST | 非常好 | 非常好 | 非常好 |
| FrSky R9 | 好 | 好 | 好 |
| F.Port | 好 | 好 | 好 |
| SBUS | 好 | 好 | 好 |
| iBUS | 好 | 好 | 好 |
| DSMX | 好 | 好 | 好 |
| FrSky ACCST | 一般 | 好 | 一般 |
| FlySky AFHDS 2A | 一般 | 一般 | 一般 |
我发现ExpressLRS和Crossfire即使在恶劣的射频环境中也非常可靠。在一次令人难忘的飞行中,我在无线电塔附近飞行,我的ExpressLRS链路保持稳定连接,而朋友的ACCST系统却经历了多次失控保护。
功能比较
| 协议 | 数传 | 空中更新 | 对频方式 | 高级功能 |
|---|---|---|---|---|
| CRSF | 全面 | 是 | 可变 | 广泛(LUA脚本、型号匹配、动态功率) |
| ExpressLRS | 可配置 | 是 | 绑定短语 | 广泛(动态功率、WiFi更新) |
| GHST | 全面 | 是 | 按键 | 良好(型号匹配、动态功率) |
| F.Port | 全面 | 有限 | 按键 | 限于FrSky生态系统 |
| FrSky (SmartPort) | 全面 | 有限 | 按键 | 限于FrSky生态系统 |
| iBUS | 基本 | 否 | 按键 | 有限 |
| SBUS | 无(单独) | 否 | 按键 | 有限 |
| DSMX | 基本 | 否 | 按键 | 有限(型号匹配) |
CRSF/ExpressLRS等新协议与旧标准之间的功能差距很大。无线固件更新和访问全面数传的能力改变了我与无人机交互的方式。
选择正确的协议
有这么多选择,选择正确的协议可能会让人不知所措。以下是我根据不同飞行场景提供的实用建议。
竞速
重点:在拥挤的射频环境中实现最小延迟和可靠性能
- 最佳选择:500Hz或更高的ExpressLRS
- 替代方案:250Hz的GHST
- 预算选择:iBUS(如果使用FlySky设备)
对于竞速,我只使用500Hz的ExpressLRS。超低延迟与出色抗干扰能力的结合是无与伦比的,特别是在拥挤的比赛环境中,数十个视频发射器和控制链路同时运行。
自由式
重点:响应性和范围的良好平衡
- 最佳选择:250Hz的ExpressLRS
- 替代方案:150Hz的CRSF (Crossfire)
- 预算选择:使用FrSky设备的F.Port或SBUS
自由式飞行受益于灵敏的控制,但不需要竞速的绝对最小延迟。我发现250Hz的ExpressLRS是最佳选择,提供出色的操控手感,同时保持足够的范围,满足典型的自由式飞行需求。
长距离飞行
重点:最大可靠范围,可接受的延迟
- 最佳选择:25-50Hz 的 ExpressLRS 900MHz
- 替代方案:TBS Crossfire 900MHz
- 预算选项:FrSky R9(有局限性)
对于我专门的长距离机型,25Hz 的 ExpressLRS 900MHz 已被证明是无与伦比的。高效的协议设计、LoRa 调制和低数据包率的结合,在保持可用的控制响应性的同时,实现了非凡的范围。
适合初学者
重点:简单性、可靠性和足够的性能
- 最佳选择:100Hz 的 ExpressLRS(有适当指导)
- 替代方案:使用 FrSky 设备的 SBUS 或 F.Port
- 预算选项:使用 FlySky 设备的 iBUS
虽然 ExpressLRS 提供最佳性能,但其配置选项可能会让初学者不知所措。如果你在帮助新飞行员,要么提供 ExpressLRS 的设置帮助,要么推荐像 FrSky 与 SBUS 这样的简单系统,它以更少的复杂性提供良好的性能。
电影式飞行
重点:平稳的控制和可靠的链接
- 最佳选择:100Hz 或 50Hz 的 ExpressLRS
- 替代方案:50Hz 的 CRSF (Crossfire)
- 预算选项:SBUS 或 F.Port
电影式飞行受益于平稳的控制输入,而不是快速响应。较低的数据包率(50-100Hz)提供了足够的响应性,同时最大限度地提高了范围和可靠性。我经常在电影机型上使用 50Hz 的 ExpressLRS,因为它提供了出色的范围和仍然平稳的控制。
RC 协议问题排查
即使正确实施,RC 协议问题也可能出现。以下是我诊断和解决常见问题的方法。
常见问题和解决方案
间歇性连接
症状:随机失控保护、控制故障或遥测中断
可能的原因和解决方案:
- 干扰:
- 将视频发射机天线远离接收机天线
- 屏蔽配电板
- 在电源线上使用铁氧体磁环
- 天线问题:
- 检查天线是否损坏
- 确保天线方向正确
- 验证天线连接是否牢固
- 电源问题:
- 验证接收机是否获得干净的 5V 电压
- 在电源输入端添加电容
- 检查负载下的电压下降
我曾经花了几周时间追查一个间歇性连接问题,最后发现我的 VTX 天线放置得离接收机天线太近了。将它们再分开 3 厘米就完全解决了问题。
无控制响应
症状:发射机已连接,但无人机无响应
可能的原因和解决方案:
- 协议不匹配:
- 验证在飞控中选择了正确的协议
- 检查发射机模块设置
- UART 配置:
- 确认 UART 已正确分配给 Serial RX
- 验证 TX/RX 连接是否正确
- 信号反相:
- 检查反相设置是否符合协议要求
- 如果使用硬件反相器,请验证
- 通道映射:
- 确保通道映射正确
- 检查 AETR 与 TAER 顺序问题
我遇到的最常见的"无响应"问题是 UART 分配不正确。始终仔细检查你连接的 UART 是否在端口选项卡中正确配置为 Serial RX。
遥测问题
症状:无遥测数据或遥测间歇
可能的原因和解决方案:
- 缺少连接:
- 对于需要双向连接的协议,请验证双向连接
- 检查是否为遥测协议连接了 TX 焊盘
- 配置问题:
- 在发射机中启用遥测
- 验证遥测比率设置(对于 ExpressLRS)
- 软件不匹配:
- 更新发射机和接收机上的固件
- 确保版本兼容
对于 ExpressLRS,我发现遥测比率对于可靠的数据至关重要。对于长距离飞行,我使用保守的 1:128 比率,优先考虑控制链路稳定性而不是遥测频率。
对频困难
症状:无法将接收机与发射机对频
可能的原因和解决方案:
- 特定协议问题:
- ExpressLRS:验证匹配的对频短语和固件版本
- Crossfire:使用 LUA 脚本进行对频
- FrSky:检查欧盟/FCC 版本兼容性
- 硬件问题:
- 确保接收机在对频期间正确供电
- 如果可用,尝试使用物理对频按钮
- 距离问题:
- 对频时保持发射机和接收机靠近
- 移除潜在的干扰源
对频问题通常是特定于协议的。使用 ExpressLRS 时,我遇到的大多数对频问题都与固件版本或对频短语不匹配有关。始终验证发射机和接收机之间的这些设置是否完全匹配。
诊断工具和技术
接收机信号质量指标
大多数现代协议都提供信号质量指标:
- RSSI(接收信号强度指示器):
- 测量整体信号强度
- 通常显示为百分比
- 低于 50% 的值表示潜在问题
- LQ(链路质量):
- 测量数据包成功率
- 对于数字系统,比 RSSI 更有用
- 低于 70% 的值需要调查
- RF 模式:
- 指示当前工作模式(例如,ExpressLRS 根据信号在 250Hz/50Hz 之间切换)
- 有助于验证动态系统是否正常工作
我非常依赖 ExpressLRS 和 Crossfire 系统的 LQ,因为它比 RSSI 提供了更有意义的链路健康指示。在飞行期间监控 LQ 趋势可以提供潜在问题的早期预警。
飞控诊断
飞控可以提供宝贵的诊断信息:
- 接收机选项卡:
- 验证通道动作是否与摇杆输入匹配
- 检查信号削波或异常值
- 确认通道映射正确
- CLI 命令:
status- 显示活动的串行 RX 提供程序rxrange- 显示通道范围set serialrx_- 列出当前串行 RX 设置
- Blackbox 日志记录:
- 分析 RC 命令数据是否存在故障或不一致
- 将 RC 数据与陀螺仪响应进行比较,以评估延迟
在排查微妙的控制问题时,我经常使用 Blackbox 日志来分析 RC 命令数据。这帮助我发现并解决了一些问题,如 RC 平滑配置错误,这在飞行中并不明显。
遥控协议的未来
遥控协议的格局在快速演变。以下是我正在密切关注的趋势和发展。
当前趋势
- 更新率不断提高:对更低延迟的追求仍在继续,目前已达到1000Hz,未来可能会有更高的速率。
- 开源开发:像ExpressLRS这样的社区驱动项目正在以比专有系统更快的速度进行创新。
- 频率灵活性:能够在多个频段(2.4GHz、900MHz、868MHz)上运行的系统为不同地区和应用提供了灵活性。
- 与数字FPV集成:控制系统和视频系统之间更紧密的集成,可能共享天线或频段。
- 遥测扩展:更全面的遥测数据,包括视频链路统计数据和高级飞行参数。
新兴技术
有几项有前景的技术正在出现,可能会进一步改变遥控协议:
- AI增强信号处理:实时适应射频环境的机器学习算法。
- 网状网络:分布式网络,其中多个无人机可以中继信号,扩大有效范围。
- 认知无线电:自动检测可用信道并相应地改变传输参数的系统。
- 量子抗性加密:随着量子计算的发展,关键应用将需要新的安全措施。
- 软件定义无线电(SDR):更灵活的无线电系统,可以通过软件更新进行重新配置。
常见问题解答:关于遥控协议的常见问题
一般协议问题
不同的协议会影响电池寿命吗?
会有影响,但在无人机方面影响很小。更高的数据包率会略微增加接收器的功耗,但与电机功耗相比,差异可以忽略不计。在发射器方面,影响可能更明显,高功率、高数据包率的系统会更快地耗尽电池。
我可以在同一架无人机上使用多种协议吗?
虽然在技术上可行(例如,通过一种协议进行控制,通过另一种协议进行遥测),但由于增加了复杂性和潜在的干扰,通常不建议这样做。现代集成协议消除了对这种方法的需求。
协议如何影响视频传输?
它们是独立的系统,但可以通过干扰相互影响。一些先进的系统,如DJI O3和Walksnail,正开始集成控制和视频传输,以实现更好的协调和减少干扰。
遥控协议有法律限制吗?
是的,各个国家对频率使用和功率输出有不同的监管规定。请务必查看当地法规,特别是对于在全球范围内有不同频率分配的900MHz系统(欧盟为868MHz,美国为915MHz)。
技术协议问题
RSSI和LQ有什么区别?
RSSI(接收信号强度指示器)测量原始信号功率,而LQ(链路质量)测量成功接收的数据包百分比。对于数字系统,LQ通常更有用,因为它直接表示通信可靠性。
数据包率如何影响延迟和范围?
更高的数据包率可以减少延迟,但通常会减少范围,因为用于纠错的时间更少,每个数据包的能量更低。这就是为什么长距离飞行使用较低的数据包率(25-50Hz),而竞速使用较高的数据包率(500Hz以上)。
即使RSSI/LQ良好,是什么原因导致失控?
有几个因素会导致这种情况:特定频率上的干扰、瞬时信号阻塞、接收器硬件问题或电源问题。良好的RSSI并不能保证所有数据包都被正确接收。
我可以用更好的天线来改善协议性能吗?
当然可以。天线的质量、类型和放置可以显著影响范围和可靠性。对于关键应用,使用具有不同方向的多个天线的分集系统可提供最佳性能。
协议选择问题
ExpressLRS真的比其他协议好那么多吗?
对于大多数指标(延迟、范围、灵活性)来说,是的。开源的性质允许快速开发和优化。然而,其他协议在特定领域(如生态系统集成或简单性)可能有优势。
远距离应该选择2.4GHz还是900MHz?
由于频率较低,900MHz通常可以提供更好的穿透力和范围,但经过优化设置的2.4GHz系统仍然可以实现令人印象深刻的范围。如果最大范围是首要任务,并且900MHz在您所在地区是合法的,那么它通常是更好的选择。
哪种协议对干扰的抵抗力最强?
ExpressLRS和TBS Crossfire在这方面都表现出色,具有复杂的跳频和纠错功能。高数据包率(250Hz以上)的ExpressLRS在竞赛等拥挤的射频环境中特别好。
从SBUS升级到更新的协议值得吗?
对大多数飞行员来说,是的。延迟、遥测集成和可靠性方面的改进是显而易见的。当同时升级射频系统(例如,升级到ExpressLRS)和接收器与飞控之间的协议(例如,升级到CRSF)时,收益最大。
结论
遥控协议已经从过去简单的模拟系统发展到今天复杂的数字通信。了解这些协议对于优化无人机的性能和可靠性至关重要。
当前的格局由串行协议主导,如用于传统系统的SBUS、用于高性能应用的CRSF,以及用于特定生态系统的专门协议如GHST和iBUS。同时,实现这些协议的射频系统也在不断进步,ExpressLRS在性能和价值方面树立了新标准。
在选择协议时,请考虑您的具体需求:
- 对于竞速,优先考虑高数据包率下ExpressLRS的最小延迟
- 对于自由式,用中等数据包率平衡响应性和范围
- 对于长距离,专注于900MHz系统的可靠性和穿透力
- 对于初学者,选择有良好文档和社区支持的系统
请记住,正确的实施与协议选择同样重要。天线放置、配置设置和定期维护都在实现最佳性能方面发挥着关键作用。
随着技术的不断进步,我们可以期待未来遥控协议会有更令人印象深刻的功能。开源开发、更高更新率以及与其他系统更紧密集成的趋势,为无人机控制系统的未来带来了激动人心的前景。


