Visão Geral dos Protocolos RC de Drones

Os protocolos de controle de rádio são as linguagens digitais que permitem que seu transmissor se comunique com seu drone. Após anos testando vários sistemas de RC em diferentes condições de voo, aprendi que entender esses protocolos é crucial para otimizar o desempenho e a confiabilidade. Este guia abrangente explora os principais protocolos de RC disponíveis atualmente e suas características técnicas, concentrando-se especificamente nos padrões de comunicação, em vez dos ecossistemas de hardware que os implementam.
Introdução aos Protocolos de RC
Quando falamos sobre sistemas de controle de rádio para drones, geralmente nos concentramos nos transmissores e receptores físicos. No entanto, é o protocolo subjacente - o padrão de comunicação que define como os dados são empacotados, transmitidos e interpretados - que realmente determina o desempenho. Pense nos protocolos como diferentes idiomas: embora todos permitam a comunicação, alguns são mais eficientes, precisos ou robustos do que outros em situações específicas.
Ainda me lembro dos meus primeiros dias de voo com receptores PWM básicos, onde cada canal exigia um fio separado e a interferência de sinal era uma preocupação constante. A evolução para os protocolos digitais modernos transformou a confiabilidade e as capacidades dos sistemas de RC, permitindo recursos que antes eram inimagináveis.
A Evolução dos Protocolos de RC
A comunicação de RC evoluiu drasticamente ao longo das décadas:
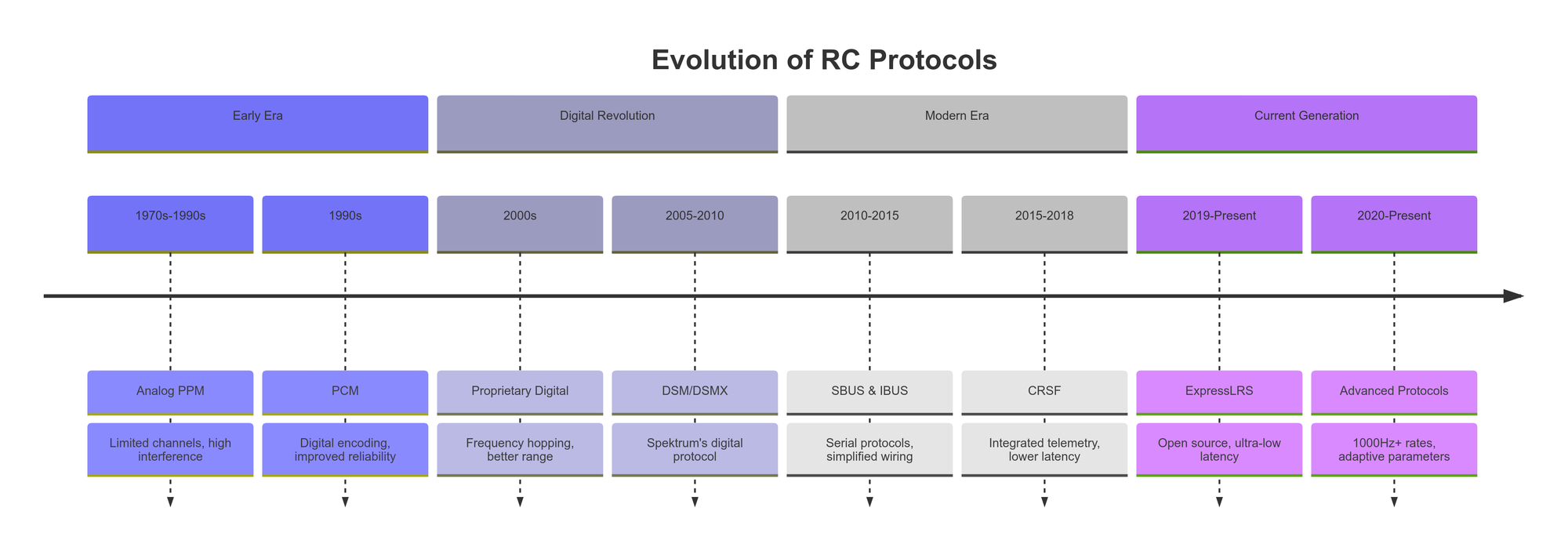
- Primeiros Dias (1970-1990): PPM analógico simples (Modulação por Posição de Pulso) com canais limitados e suscetibilidade a interferências.
- Revolução Digital (2000): Introdução do PCM (Modulação por Código de Pulso) e dos primeiros protocolos digitais proprietários com confiabilidade e recursos aprimorados. Isso foi um divisor de águas - de repente, falhas no ar se tornaram muito menos comuns.
- Era Moderna (2010): Desenvolvimento de protocolos seriais sofisticados como SBUS, CRSF e iBUS, oferecendo múltiplos canais, telemetria e recursos avançados.
- Geração Atual (2020): Protocolos avançados expandindo os limites de desempenho com taxas de atualização e alcance sem precedentes. As melhorias técnicas no design de protocolos permitiram um desempenho que não era possível com equipamentos de consumo há apenas alguns anos.
Por que os Protocolos Importam
O protocolo que você escolhe afeta vários aspectos críticos da sua experiência de voo:
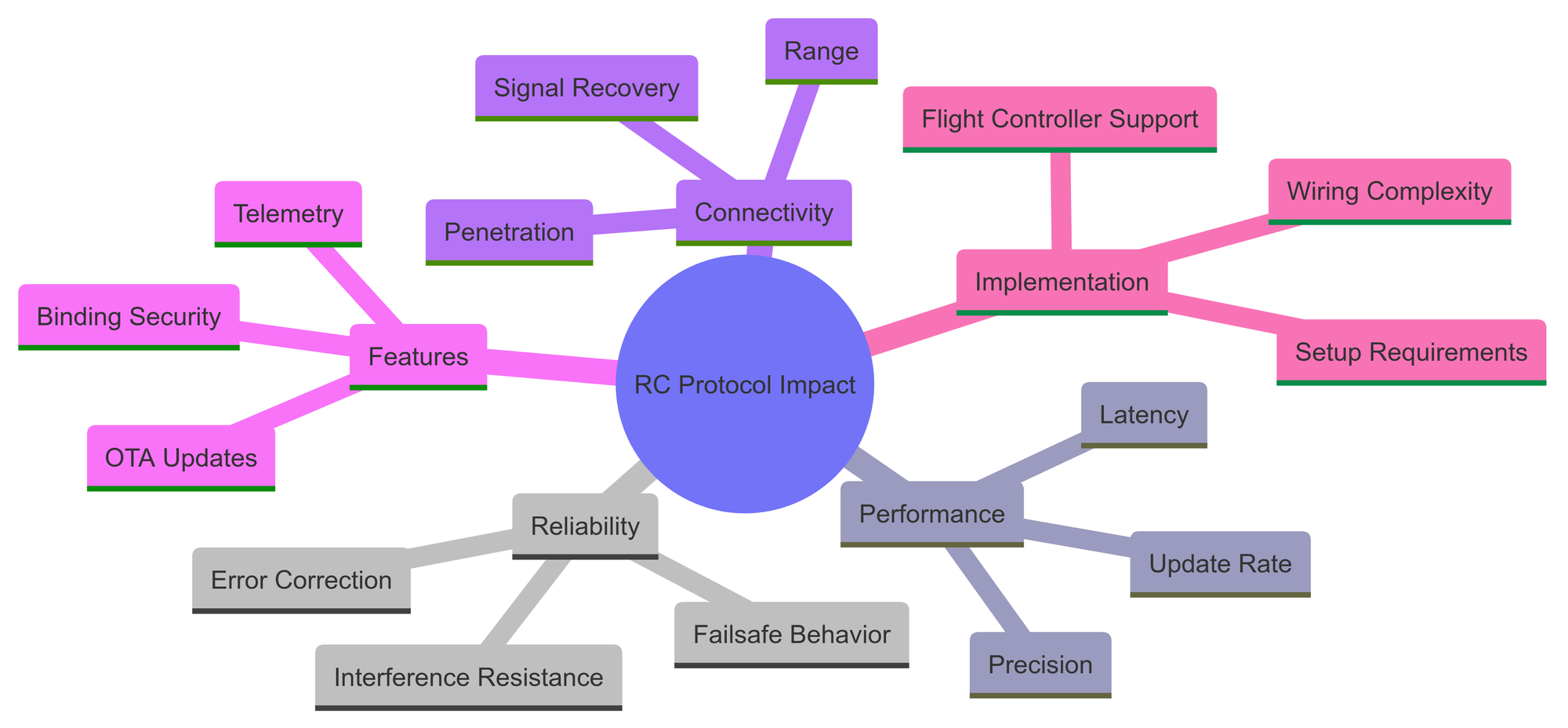
- Latência: Quão rapidamente os movimentos do stick se traduzem na resposta do drone
- Alcance: Até onde você pode voar mantendo o controle confiável
- Confiabilidade: Quão resistente é o link à interferência e perda de sinal
- Recursos: Quais recursos adicionais estão disponíveis (telemetria, atualizações over-the-air, etc.)
- Requisitos de Hardware: Que equipamento é necessário para usar o protocolo
Já experimentei em primeira mão como a troca de protocolos pode transformar o desempenho de um drone. O protocolo certo pode fazer a diferença entre um drone que parece lento e não responsivo e um que parece uma extensão dos seus pensamentos.
Entendendo os Fundamentos do Protocolo
Antes de mergulhar em protocolos específicos, é importante entender os conceitos técnicos que os diferenciam.
Principais Conceitos Técnicos
Modulação de Sinal
Como a informação é codificada na onda portadora:

- Espalhamento Espectral por Salto de Frequência (FHSS): Alterna rapidamente as frequências de acordo com um padrão predeterminado, melhorando a resistência a interferências. A maioria dos protocolos modernos usa alguma forma de FHSS.
- Espalhamento Espectral de Sequência Direta (DSSS): Espalha o sinal por uma ampla largura de banda, tornando-o resistente a interferências de banda estreita. Menos comum em aplicações de drones.
- Agilidade de Frequência Adaptativa: Sistemas avançados que detectam e evitam ativamente interferências, alterando os padrões de frequência. Achei esses particularmente valiosos ao voar em ambientes urbanos com ruído de RF imprevisível.
Taxas de Dados e Estrutura de Pacotes
Como as informações são empacotadas e transmitidas:
| Conceito | Descrição | Impacto no Desempenho |
|---|---|---|
| Taxa de Pacotes | Número de pacotes de dados enviados por segundo (Hz) | Taxas mais altas = menor latência, mas alcance reduzido |
| Tamanho do Pacote | Quantidade de informações em cada transmissão | Pacotes maiores = mais dados, mas tempo de transmissão mais longo |
| Correção de Erros | Métodos para detectar e recuperar erros | Correção mais robusta = melhor confiabilidade, mas maior latência |
| Resolução de Canal | Precisão dos valores de controle (bits) | Maior resolução = controle mais preciso, mas pacotes maiores |
| Enquadramento | Como os pacotes são estruturados e identificados | Enquadramento eficiente = menor sobrecarga e melhor desempenho |
Experimentei extensivamente com diferentes taxas de pacotes e descobri que a configuração ideal varia drasticamente com base no estilo de voo. Para corridas, prefiro 500Hz ou mais para latência mínima, enquanto para cruzeiro de longo alcance, 50Hz ou menos fornecem melhor alcance com responsividade ainda aceitável.
Orçamento de Link
O equilíbrio geral de potência do link de rádio:

Entender o orçamento de link tem sido crucial para minhas construções de longo alcance. Aprendi que dobrar a potência de transmissão adiciona muito menos alcance do que otimizar antenas ou melhorar a sensibilidade do receptor.
Protocolo vs. Sistema de RF vs. Conexão Física
É importante distinguir entre conceitos relacionados, mas diferentes:
| Conceito | Descrição | Exemplos |
|---|---|---|
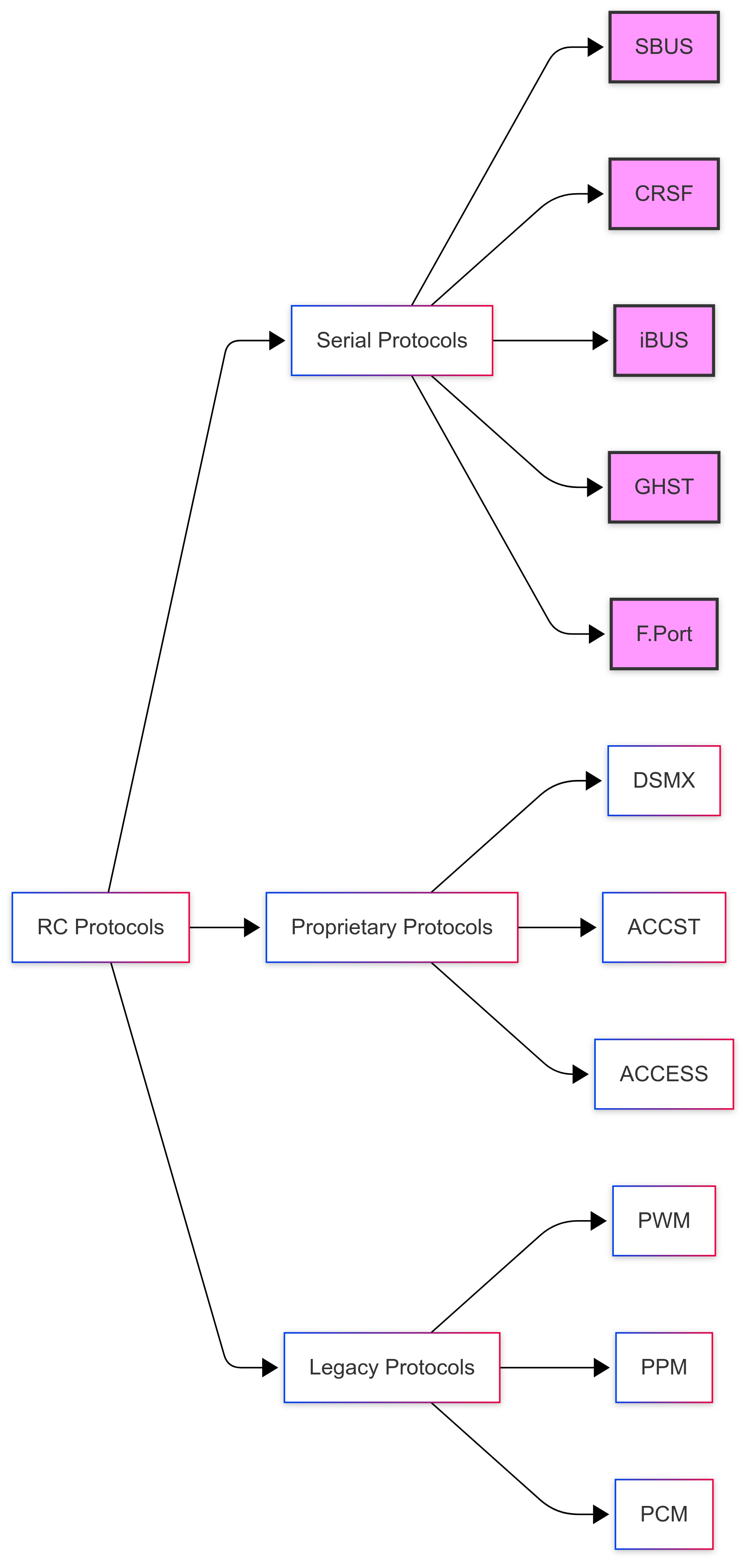
| Protocolo | Padrão de comunicação que define como os dados são estruturados | CRSF, SBUS, iBUS, GHST |
| Sistema de RF | Tecnologia de radiofrequência usada para transmitir o sinal | ExpressLRS, Crossfire, ACCST, DSMX |
| Conexão Física | Como o receptor se conecta ao controlador de voo | UART, PWM, I2C, SPI |
Essa distinção é importante porque o mesmo protocolo (por exemplo, CRSF) pode ser usado por diferentes sistemas de RF (por exemplo, TBS Crossfire e ExpressLRS), e o mesmo sistema de RF às vezes pode suportar vários protocolos.
Principais Protocolos de RC
Vamos examinar os protocolos mais significativos no mundo dos drones, com base em meus extensos testes e experiência no mundo real.
Visão Geral da Comparação de Protocolos
SBUS (Barramento Serial)
Desenvolvido pela Futaba e amplamente adotado pela FrSky e outros, o SBUS tem sido um padrão por muitos anos.
Características Técnicas
- Taxa de Dados: 100.000 bps
- Taxa de Atualização: Normalmente 9ms (111Hz)
- Canais: Até 16 proporcionais + 2 digitais
- Latência: ~14ms de ponta a ponta (típico)
- Tipo de Sinal: Serial UART invertido
- Telemetria: Não incluída no próprio SBUS (requer conexão separada)
Pontos Fortes
- Compatibilidade Generalizada: Suportado por praticamente todos os controladores de voo
- Simplicidade: Conexão de fio único com o controlador de voo
- Confiabilidade: Histórico comprovado em inúmeras construções
Limitações
- Inversão de Sinal: Requer inversor para controladores de voo F1/F3 (F4 e mais recentes têm inversores integrados)
- Latência Moderada: Não tão responsivo quanto protocolos mais recentes
- Sem Telemetria Integrada: Requer conexão separada para dados de telemetria
Eu usei SBUS em dezenas de construções ao longo dos anos, e ele continua sendo uma escolha sólida e confiável. Eu aprecio particularmente sua compatibilidade universal - nunca encontrei um controlador de voo que não pudesse usar SBUS.
CRSF (Crossfire RF)
Desenvolvido pela Team BlackSheep para seu sistema Crossfire e posteriormente adotado pelo ExpressLRS, o CRSF se tornou o padrão ouro para links RC de alto desempenho.
Características Técnicas
- Taxa de Dados: 420.000 bps
- Taxa de Atualização: Variável de 50Hz a 1000Hz (dependendo da implementação)
- Canais: Até 12 canais
- Latência: Tão baixa quanto 2ms (a 1000Hz)
- Tipo de Sinal: Serial UART não invertido
- Telemetria: Comunicação bidirecional integrada
Pontos Fortes
- Baixa Latência: Controle extremamente responsivo
- Telemetria Integrada: Feedback abrangente de dados na mesma conexão
- Recursos Avançados: Suporte para scripts LUA, atualizações over-the-air, correspondência de modelo
- Implementação Flexível: Usado por vários sistemas de RF com características diferentes
Limitações
- Complexidade: Mais opções de configuração podem ser esmagadoras para iniciantes
- Requisitos de Hardware: Precisa de controlador de voo com UART disponível
- Variações de Implementação: Diferentes sistemas usando CRSF podem ter capacidades diferentes
O CRSF tem sido meu protocolo de escolha para construções sérias desde 2018. A combinação de baixa latência, telemetria integrada e recursos avançados torna-o difícil de superar. O design do protocolo permite um excelente desempenho em uma ampla gama de aplicações.
iBUS
Desenvolvido pela FlySky, o iBUS oferece um protocolo serial simples com telemetria integrada.
Características Técnicas
- Taxa de Dados: 115.200 bps
- Taxa de Atualização: Normalmente 8ms (125Hz)
- Canais: Até 14 canais
- Latência: ~12ms de ponta a ponta (típico)
- Tipo de Sinal: Serial UART não invertido
- Telemetria: Comunicação bidirecional integrada
Pontos Fortes
- Sem Inversão de Sinal: Funciona diretamente com todos os controladores de voo
- Telemetria Integrada: Solução de fio único para controle e dados
- Simplicidade: Configuração simples com configuração mínima
Limitações
- Ecossistema Limitado: Usado principalmente com equipamentos FlySky
- Menos Recursos Avançados: Em comparação com CRSF ou GHST
- Menos Comum: Menos suporte e desenvolvimento da comunidade
Eu usei iBUS em várias construções de orçamento, e ele tem um desempenho admirável para o ponto de preço. O sinal não invertido é particularmente conveniente ao trabalhar com controladores de voo mais antigos, eliminando a necessidade de inversores de sinal que o SBUS requer.
GHST (Ghost)
Desenvolvido pela ImmersionRC para seu sistema Ghost, o GHST oferece um excelente equilíbrio de características de desempenho.
Características Técnicas
- Taxa de Dados: 420.000 bps
- Taxa de Atualização: Variável de 50Hz a 250Hz
- Canais: Até 12 canais
- Latência: Tão baixa quanto 5ms
- Tipo de Sinal: Serial UART não invertido
- Telemetria: Comunicação bidirecional integrada
Pontos Fortes
- Latência Muito Baixa: Excelente capacidade de resposta
- Bom Alcance: Capacidades de distância acima da média
- Implementação Limpa: Protocolo bem projetado com uso eficiente de largura de banda
- Documentação Aberta: Especificações transparentes do protocolo
Limitações
- Adoção Limitada: Não tão amplamente usado quanto CRSF ou SBUS
- Menos Opções de Hardware: Seleção limitada de equipamentos compatíveis
- Menos Desenvolvimento da Comunidade: Ecossistema menor de ferramentas e recursos
Eu testei o GHST extensivamente e fiquei impressionado com sua implementação técnica. O protocolo alcança um excelente equilíbrio entre latência e alcance, embora não tenha ganhado a participação de mercado de alguns concorrentes.
DSMX
Desenvolvido pela Spektrum, o DSMX é amplamente usado nos EUA e em modelos prontos para voar.
Características Técnicas
- Taxa de Dados: Proprietária
- Taxa de Atualização: 11ms (91Hz) ou 22ms (45Hz)
- Canais: Até 12 canais
- Latência: ~14ms (taxa de quadros de 11ms) ou ~25ms (taxa de quadros de 22ms)
- Tipo de Sinal: Serial proprietário
- Telemetria: Limitada na maioria das implementações
Pontos Fortes
- Difundido em Modelos RTF: Comum em drones prontos para voar
- Forte Presença no Mercado dos EUA: Bem suportado na América do Norte
- Simplicidade de Vinculação: Processo fácil de vinculação do receptor
Limitações
- Ecossistema Fechado: Protocolo proprietário com suporte limitado de terceiros
- Latência Mais Alta: Não tão responsivo quanto os protocolos mais recentes
- Telemetria Limitada: Básica em comparação com CRSF ou GHST
Embora eu não tenha usado o DSMX tão extensivamente quanto outros protocolos, trabalhei com vários drones equipados com Spektrum. O protocolo é confiável, mas parece desatualizado em comparação com alternativas mais recentes, particularmente em termos de latência e conjunto de recursos.
F.Port
Desenvolvido pela FrSky, o F.Port combina o controle SBUS e a telemetria SmartPort em uma única conexão.
Características Técnicas
- Taxa de Dados: 115.200 bps
- Taxa de Atualização: Normalmente 9ms (111Hz)
- Canais: Até 16 proporcionais + 2 digitais
- Latência: ~14ms de ponta a ponta (típico)
- Tipo de Sinal: UART half-duplex
- Telemetria: Comunicação bidirecional integrada
Pontos Fortes
- Solução de Fio Único: Combina controle e telemetria
- Compatibilidade: Funciona com o ecossistema FrSky existente
- Eficiência de Recursos: Libera portas UART no controlador de voo
Limitações
- Específico da FrSky: Limitado a equipamentos FrSky
- Complexidade de Configuração: Pode ser complicado de configurar corretamente
- Popularidade em Declínio: Sendo substituído por protocolos mais recentes
Converti vários dos meus builds FrSky de SBUS/SmartPort separados para F.Port. A solução de fio único é elegante, embora eu tenha achado a configuração mais complicada do que o esperado, geralmente exigindo atualizações de firmware tanto no receptor quanto no transmissor.
Protocolos FrSky
A FrSky desenvolveu vários protocolos que merecem menção específica devido ao seu uso generalizado na comunidade de drones.
ACCST (Advanced Continuous Channel Shifting Technology)
O protocolo digital original da FrSky que ganhou ampla adoção:
- Taxa de Dados: Variável
- Taxa de Atualização: Normalmente 9ms (111Hz)
- Canais: Até 16 canais (modo D16)
- Latência: ~14ms de ponta a ponta (típico)
- Tipo de Sinal: FHSS de 2,4 GHz
- Telemetria: Disponível via conexão SmartPort separada
Variantes:
- D8: Modo de 8 canais compatível com receptores mais antigos
- D16: Modo de 16 canais com recursos aprimorados
- LR12: Variante de longo alcance com canais reduzidos
Eu usei o ACCST D16 por anos e achei que era um protocolo confiável para voos diários. Embora não seja tão avançado quanto as opções mais recentes, ele forneceu desempenho consistente e boa compatibilidade com uma ampla gama de controladores de voo.
ACCESS (Advanced Communication Control, Elevated Spread Spectrum)
O protocolo mais recente da FrSky, introduzido em 2019 como um substituto para o ACCST:
- Taxa de Dados: Maior que o ACCST
- Taxa de Atualização: Normalmente 9ms (111Hz)
- Canais: Até 24 canais
- Latência: ~12-14ms de ponta a ponta (típico)
- Tipo de Sinal: FHSS de 2,4 GHz com segurança aprimorada
- Telemetria: Integrada com maior largura de banda
Principais Recursos:
- Segurança Aprimorada: Usa vinculação de ID exclusivo para evitar conexões não autorizadas
- Atualizações Over-the-Air: Capacidade de atualizar o firmware do receptor a partir do transmissor
- Análise de Espectro: Varredura de frequência integrada para evitar interferência
- Smart Match: Processo de vinculação simplificado com registro do receptor
Minha experiência com o ACCESS tem sido mista. Embora os recursos de segurança aprimorados e as atualizações OTA sejam valiosos, a transição do ACCST foi confusa devido a problemas de compatibilidade. Quando configurado corretamente, o ACCESS tem um desempenho ligeiramente melhor que o ACCST em termos de alcance e confiabilidade, mas as diferenças não são dramáticas para cenários de voo típicos.
Protocolos Legados
Embora menos comuns em drones modernos, esses protocolos valem a pena entender para o contexto histórico:
PWM (Modulação por Largura de Pulso)
- Características: Um fio por canal, controle direto do servo
- Limitações: Fiação volumosa, canais limitados, suscetível a interferências
- Uso Atual: Raramente usado em drones modernos, exceto para conexões diretas de servo
PPM (Modulação por Posição de Pulso)
- Características: Múltiplos canais em um único fio, sinal analógico
- Limitações: Canais limitados (geralmente 8), latência moderada
- Uso Atual: Ocasionalmente encontrado em equipamentos básicos ou mais antigos
PCM (Modulação por Código de Pulso)
- Características: Codificação digital de sinais de controle
- Vantagens: Melhor detecção de erros do que PPM
- Uso Atual: Amplamente substituído por protocolos digitais mais recentes
Comparação de Desempenho de Protocolos
Após extensos testes em várias condições, veja como os principais protocolos se comparam em métricas de desempenho importantes.
Comparação de Latência
Medido do movimento do stick até a resposta do controlador de voo:
| Protocolo | Latência Mínima | Latência Típica | Notas |
|---|---|---|---|
| ExpressLRS | 2ms | 4-10ms | Varia com a taxa de pacotes (1000Hz-50Hz) |
| GHST | 5ms | 7-12ms | Varia com a taxa de pacotes (250Hz-50Hz) |
| CRSF (Crossfire) | 6ms | 10-15ms | Varia com a taxa de pacotes (150Hz-50Hz) |
| iBUS | 10ms | 12-15ms | Relativamente consistente |
| F.Port | 12ms | 14-16ms | Semelhante ao SBUS |
| SBUS | 12ms | 14-16ms | Relativamente consistente |
| DSMX | 14ms | 14-25ms | Depende da configuração da taxa de quadros |
Na minha experiência, as diferenças de latência se tornam perceptíveis em torno de 5ms. Voar com ExpressLRS a 500Hz parece notavelmente mais responsivo do que SBUS, particularmente durante manobras e correções rápidas.
Comparação de Alcance
Com base nos meus testes com potência de saída comparável (100mW) e antenas padrão:
| Protocolo | Alcance Típico | Alcance Máximo | Notas |
|---|---|---|---|
| ExpressLRS 2.4GHz (50Hz) | 5-10km | 30km+ | Relação alcance-latência excepcional |
| TBS Crossfire 900MHz | 5-10km | 40km+ | Padrão da indústria para longo alcance |
| ExpressLRS 900MHz (25Hz) | 10-20km | 50km+ | Atual campeão de alcance |
| GHST 2.4GHz | 3-5km | 10km+ | Bom equilíbrio entre alcance e latência |
| FrSky R9 900MHz | 3-5km | 15km+ | Bom alcance, mas menos confiável que sistemas mais novos |
| FrSky ACCST 2.4GHz | 1-2km | 5km | Adequado para a maioria dos voos |
| FlySky AFHDS 2A | 0.5-1.5km | 3km | Limitado, mas suficiente para linha de visão |
| DSMX | 1-2km | 3km | Adequado para a maioria dos voos |
Esses alcances pressupõem condições ideais com linha de visão clara. O alcance no mundo real é afetado por obstáculos, interferências, posicionamento da antena e outros fatores.
Comparação de Confiabilidade
Com base na minha experiência de voo em vários ambientes:
| Protocolo | Resistência a Interferências | Confiabilidade do Failsafe | Robustez Geral |
|---|---|---|---|
| ExpressLRS | Excelente | Excelente | Excelente |
| TBS Crossfire | Excelente | Excelente | Excelente |
| GHST | Muito Boa | Muito Boa | Muito Boa |
| FrSky R9 | Boa | Boa | Boa |
| F.Port | Boa | Boa | Boa |
| SBUS | Boa | Boa | Boa |
| iBUS | Boa | Boa | Boa |
| DSMX | Boa | Boa | Boa |
| FrSky ACCST | Razoável | Boa | Razoável |
| FlySky AFHDS 2A | Razoável | Razoável | Razoável |
Descobri que o ExpressLRS e o Crossfire são excepcionalmente confiáveis, mesmo em ambientes de RF desafiadores. Durante um voo memorável perto de uma torre de rádio, meu link ExpressLRS manteve uma conexão sólida enquanto o sistema ACCST de um amigo experimentou vários failsafes.
Comparação de Recursos
| Protocolo | Telemetria | Atualizações OTA | Método de Binding | Recursos Avançados |
|---|---|---|---|---|
| CRSF | Abrangente | Sim | Variável | Extensos (scripts LUA, correspondência de modelo, potência dinâmica) |
| ExpressLRS | Configurável | Sim | Frase de Binding | Extensos (potência dinâmica, atualizações via WiFi) |
| GHST | Abrangente | Sim | Pressionar Botão | Bons (correspondência de modelo, potência dinâmica) |
| F.Port | Abrangente | Limitadas | Pressionar Botão | Limitado ao ecossistema FrSky |
| FrSky (SmartPort) | Abrangente | Limitadas | Pressionar Botão | Limitado ao ecossistema FrSky |
| iBUS | Básica | Não | Pressionar Botão | Limitados |
| SBUS | Nenhuma (separada) | Não | Pressionar Botão | Limitados |
| DSMX | Básica | Não | Pressionar Botão | Limitados (correspondência de modelo) |
A diferença de recursos entre protocolos mais novos como CRSF/ExpressLRS e padrões mais antigos é substancial. A capacidade de atualizar o firmware over-the-air e acessar telemetria abrangente transformou a forma como interajo com meus drones.
Escolhendo o Protocolo Certo
Com tantas opções, selecionar o protocolo certo pode ser esmagador. Aqui está meu conselho prático com base em diferentes cenários de voo.
Para Corrida
Prioridade: Latência mínima e desempenho confiável em ambientes de RF lotados
- Melhor Escolha: ExpressLRS a 500Hz ou superior
- Alternativa: GHST a 250Hz
- Opção Econômica: iBUS (se estiver usando equipamento FlySky)
Para corridas, uso exclusivamente ExpressLRS a 500Hz. A combinação de latência ultra-baixa e excelente resistência a interferências é inigualável, particularmente em ambientes de corrida lotados, onde dezenas de transmissores de vídeo e links de controle operam simultaneamente.
Para Freestyle
Prioridade: Bom equilíbrio entre capacidade de resposta e alcance
- Melhor Escolha: ExpressLRS a 250Hz
- Alternativa: CRSF (Crossfire) a 150Hz
- Opção Econômica: F.Port ou SBUS com equipamento FrSky
O voo freestyle se beneficia de controles responsivos, mas não requer a latência mínima absoluta das corridas. Descobri que o ExpressLRS a 250Hz é o ponto ideal, oferecendo uma excelente sensação do stick enquanto mantém mais do que alcance suficiente para sessões típicas de freestyle.
Para Longo Alcance
Prioridade: Alcance máximo confiável com latência aceitável
- Melhor Escolha: ExpressLRS 900MHz a 25-50Hz
- Alternativa: TBS Crossfire 900MHz
- Opção Econômica: FrSky R9 (com limitações)
Para minhas construções dedicadas de longo alcance, o ExpressLRS 900MHz a 25Hz provou ser imbatível. A combinação de design de protocolo eficiente, modulação LoRa e baixa taxa de pacotes permite um alcance extraordinário, mantendo a capacidade de resposta do controle utilizável.
Para Iniciantes
Prioridade: Simplicidade, confiabilidade e desempenho adequado
- Melhor Escolha: ExpressLRS a 100Hz (com orientação apropriada)
- Alternativa: SBUS ou F.Port com equipamento FrSky
- Opção Econômica: iBUS com equipamento FlySky
Embora o ExpressLRS ofereça o melhor desempenho, suas opções de configuração podem sobrecarregar os iniciantes. Se você estiver ajudando um novo piloto, forneça assistência de configuração com ExpressLRS ou recomende um sistema mais simples como FrSky com SBUS, que oferece bom desempenho com menos complexidade.
Para Voos Cinematográficos
Prioridade: Controle suave e link confiável
- Melhor Escolha: ExpressLRS a 100Hz ou 50Hz
- Alternativa: CRSF (Crossfire) a 50Hz
- Opção Econômica: SBUS ou F.Port
Voos cinematográficos se beneficiam de entradas de controle suaves em vez de resposta rápida. Taxas de pacotes mais baixas (50-100Hz) fornecem capacidade de resposta mais do que suficiente, maximizando o alcance e a confiabilidade. Eu frequentemente uso ExpressLRS a 50Hz para minhas construções cinematográficas, pois oferece excelente alcance com controle ainda suave.
Solucionando Problemas de Protocolo
Mesmo com a implementação adequada, podem surgir problemas de protocolo RC. Veja como eu diagnostico e resolvo problemas comuns.
Problemas Comuns e Soluções
Conexão Intermitente
Sintomas: Failsafes aleatórios, falhas de controle ou interrupções de telemetria
Possíveis Causas e Soluções:
- Interferência:
- Afaste a antena do transmissor de vídeo da antena do receptor
- Proteja a placa de distribuição de energia
- Use núcleos de ferrite nos cabos de alimentação
- Problemas de Antena:
- Verifique se há antenas danificadas
- Garanta a orientação correta da antena
- Verifique se as conexões da antena estão firmes
- Problemas de Energia:
- Verifique se o receptor está recebendo 5V limpos
- Adicione um capacitor à entrada de energia
- Verifique se há quedas de tensão sob carga
Uma vez persegui um problema de conexão intermitente por semanas antes de descobrir que minha antena VTX estava posicionada muito perto da antena do meu receptor. Afastá-las apenas 3cm resolveu completamente o problema.
Sem Resposta de Controle
Sintomas: Transmissor conectado, mas sem resposta do drone
Possíveis Causas e Soluções:
- Incompatibilidade de Protocolo:
- Verifique se o protocolo correto está selecionado no controlador de voo
- Verifique as configurações do módulo do transmissor
- Configuração UART:
- Confirme se a UART está atribuída corretamente ao Serial RX
- Verifique se as conexões TX/RX estão corretas
- Inversão de Sinal:
- Verifique se a configuração de inversão corresponde aos requisitos do protocolo
- Verifique o inversor de hardware, se estiver usando um
- Mapeamento de Canais:
- Certifique-se de que os canais estejam mapeados corretamente
- Verifique problemas de ordem AETR vs TAER
O problema de "sem resposta" mais comum que encontro é a atribuição incorreta da UART. Sempre verifique novamente se a UART à qual você se conectou está configurada corretamente para Serial RX na aba de portas.
Problemas de Telemetria
Sintomas: Sem dados de telemetria ou telemetria intermitente
Possíveis Causas e Soluções:
- Conexão Ausente:
- Verifique a conexão bidirecional para protocolos que a exigem
- Verifique se o pad TX está conectado para protocolos de telemetria
- Problemas de Configuração:
- Habilite a telemetria no transmissor
- Verifique as configurações da taxa de telemetria (para ExpressLRS)
- Incompatibilidade de Software:
- Atualize o firmware no transmissor e receptor
- Garanta versões compatíveis
Para o ExpressLRS, descobri que a taxa de telemetria é crucial para dados confiáveis. Para voos de longo alcance, uso uma taxa conservadora de 1:128 para priorizar a estabilidade do link de controle sobre a frequência de telemetria.
Dificuldades de Binding
Sintomas: Não é possível fazer o binding do receptor ao transmissor
Possíveis Causas e Soluções:
- Problemas Específicos do Protocolo:
- ExpressLRS: Verifique se as frases de binding e versões de firmware correspondem
- Crossfire: Use o script LUA para binding
- FrSky: Verifique a compatibilidade da versão EU/FCC
- Problemas de Hardware:
- Certifique-se de que o receptor esteja alimentado corretamente durante o binding
- Tente o botão físico de bind, se disponível
- Problemas de Distância:
- Mantenha o transmissor e o receptor próximos durante o binding
- Remova possíveis fontes de interferência
Os problemas de binding geralmente são específicos do protocolo. Com o ExpressLRS, a maioria dos problemas de binding que encontrei estão relacionados a versões de firmware ou frases de binding incompatíveis. Sempre verifique se elas correspondem exatamente entre o transmissor e o receptor.
Ferramentas e Técnicas de Diagnóstico
Indicadores de Qualidade do Sinal do Receptor
A maioria dos protocolos modernos fornece métricas de qualidade do sinal:
- RSSI (Indicador de Intensidade do Sinal Recebido):
- Mede a intensidade geral do sinal
- Normalmente exibido como porcentagem
- Valores abaixo de 50% indicam problemas potenciais
- LQ (Qualidade do Link):
- Mede a taxa de sucesso de pacotes
- Mais útil que o RSSI para sistemas digitais
- Valores abaixo de 70% justificam investigação
- Modo RF:
- Indica o modo de operação atual (por exemplo, o ExpressLRS alterna entre 250Hz/50Hz com base no sinal)
- Ajuda a verificar se os sistemas dinâmicos estão funcionando corretamente
Eu confio muito no LQ para sistemas ExpressLRS e Crossfire, pois ele fornece uma indicação mais significativa da saúde do link do que o RSSI. Monitorar as tendências do LQ durante o voo pode fornecer um aviso prévio de possíveis problemas.
Diagnósticos do Controlador de Voo
O controlador de voo pode fornecer informações valiosas de diagnóstico:
- Aba do Receptor:
- Verifique se os movimentos dos canais correspondem às entradas do stick
- Verifique se há cortes de sinal ou valores anormais
- Confirme se o mapeamento de canais está correto
- Comandos CLI:
status- Mostra o provedor de serial RX ativorxrange- Exibe os intervalos dos canaisset serialrx_- Lista as configurações atuais do serial RX
- Registro do Blackbox:
- Analise os dados de comando RC em busca de falhas ou inconsistências
- Compare os dados RC com a resposta do giroscópio para avaliação de latência
Ao solucionar problemas sutis de controle, costumo usar os logs do Blackbox para analisar os dados de comando RC. Isso me ajudou a identificar e resolver problemas como erros de configuração de suavização RC que não eram imediatamente aparentes durante o voo.
Futuro dos Protocolos RC
O cenário dos protocolos RC continua evoluindo rapidamente. Aqui estão as tendências e desenvolvimentos que estou acompanhando de perto.
Tendências Atuais
- Aumento das Taxas de Atualização: A busca por menor latência continua, com 1000Hz agora disponíveis e potencialmente taxas mais altas no futuro.
- Desenvolvimento de Código Aberto: Projetos orientados pela comunidade como o ExpressLRS estão inovando mais rápido do que os sistemas proprietários.
- Agilidade de Frequência: Sistemas que podem operar em múltiplas bandas (2.4GHz, 900MHz, 868MHz) proporcionam flexibilidade para diferentes regiões e aplicações.
- Integração com FPV Digital: Integração mais estreita entre os sistemas de controle e vídeo, potencialmente compartilhando antenas ou bandas de frequência.
- Expansão da Telemetria: Dados de telemetria mais abrangentes, incluindo estatísticas de link de vídeo e parâmetros avançados de voo.
Tecnologias Emergentes
Várias tecnologias promissoras estão no horizonte que podem transformar ainda mais os protocolos RC:
- Processamento de Sinal Aprimorado por IA: Algoritmos de aprendizado de máquina que se adaptam a ambientes de RF em tempo real.
- Redes em Malha: Redes distribuídas onde múltiplos drones podem retransmitir sinais, estendendo o alcance efetivo.
- Rádio Cognitivo: Sistemas que detectam automaticamente canais disponíveis e alteram os parâmetros de transmissão de acordo.
- Criptografia Resistente a Quantum: À medida que a computação quântica avança, novas medidas de segurança serão necessárias para aplicações críticas.
- Rádio Definido por Software (SDR): Sistemas de rádio mais flexíveis que podem ser reconfigurados por meio de atualizações de software.
FAQ: Perguntas Comuns Sobre Protocolos RC
Perguntas Gerais Sobre Protocolos
Diferentes protocolos afetam a vida útil da bateria?
Sim, mas minimamente no lado do drone. Taxas de pacotes mais altas consomem um pouco mais de energia no receptor, mas a diferença é insignificante em comparação com o consumo de energia dos motores. No lado do transmissor, o efeito pode ser mais perceptível, com sistemas de alta potência e alta taxa de pacotes drenando as baterias mais rapidamente.
Posso usar vários protocolos no mesmo drone?
Embora tecnicamente possível (por exemplo, controle via um protocolo e telemetria via outro), geralmente não é recomendado devido à complexidade adicional e potencial interferência. Os protocolos integrados modernos eliminam a necessidade dessa abordagem.
Como os protocolos afetam a transmissão de vídeo?
São sistemas separados, mas podem afetar um ao outro por meio de interferência. Alguns sistemas avançados como DJI O3 e Walksnail estão começando a integrar a transmissão de controle e vídeo para melhor coordenação e redução de interferência.
Existem restrições legais nos protocolos RC?
Sim, o uso de frequência e a potência de saída são regulamentados de forma diferente em vários países. Sempre verifique as regulamentações locais, particularmente para sistemas de 900MHz que têm diferentes alocações de frequência em todo o mundo (868MHz na UE, 915MHz nos EUA).
Perguntas Técnicas Sobre Protocolos
Qual é a diferença entre RSSI e LQ?
RSSI (Indicador de Intensidade do Sinal Recebido) mede a potência bruta do sinal, enquanto LQ (Qualidade do Link) mede a porcentagem de pacotes recebidos com sucesso. O LQ é geralmente mais útil para sistemas digitais, pois indica diretamente a confiabilidade da comunicação.
Como a taxa de pacotes afeta a latência e o alcance?
Taxas de pacotes mais altas reduzem a latência, mas normalmente diminuem o alcance devido ao menor tempo para correção de erros e menor energia por pacote. É por isso que o voo de longo alcance usa taxas de pacotes mais baixas (25-50Hz), enquanto as corridas usam taxas mais altas (500Hz+).
O que causa failsafes mesmo com bom RSSI/LQ?
Vários fatores podem causar isso: interferência em frequências específicas, bloqueio momentâneo do sinal, problemas de hardware do receptor ou problemas de fonte de alimentação. Um bom RSSI não garante que todos os pacotes estejam sendo recebidos corretamente.
Posso melhorar o desempenho do protocolo com melhores antenas?
Absolutamente. A qualidade, o tipo e a colocação da antena podem afetar drasticamente o alcance e a confiabilidade. Para aplicações críticas, o uso de sistemas de diversidade com várias antenas em diferentes orientações fornece o melhor desempenho.
Perguntas Sobre Seleção de Protocolo
O ExpressLRS é realmente muito melhor do que outros protocolos?
Para a maioria das métricas (latência, alcance, flexibilidade), sim. A natureza de código aberto permitiu um desenvolvimento e otimização rápidos. No entanto, outros protocolos podem oferecer vantagens em áreas específicas, como integração de ecossistema ou simplicidade.
Devo escolher 2.4GHz ou 900MHz para longo alcance?
O 900MHz geralmente fornece melhor penetração e alcance devido à frequência mais baixa, mas os sistemas de 2.4GHz ainda podem alcançar um alcance impressionante com configurações otimizadas. Se o alcance máximo for a prioridade e o 900MHz for legal em sua região, geralmente é a melhor escolha.
Qual protocolo tem a melhor resistência a interferências?
ExpressLRS e TBS Crossfire se destacam aqui, com salto de frequência sofisticado e correção de erros. O ExpressLRS em taxas de pacotes mais altas (250Hz+) é particularmente bom em ambientes de RF lotados, como eventos de corrida.
Vale a pena atualizar do SBUS para um protocolo mais recente?
Para a maioria dos pilotos, sim. As melhorias na latência, integração de telemetria e confiabilidade são perceptíveis. Os maiores ganhos ocorrem ao atualizar tanto o sistema de RF (por exemplo, para ExpressLRS) quanto o protocolo entre o receptor e o controlador de voo (por exemplo, para CRSF).
Conclusão
Os protocolos RC evoluíram dramaticamente dos simples sistemas analógicos do passado para as sofisticadas comunicações digitais de hoje. Entender esses protocolos é crucial para otimizar o desempenho e a confiabilidade do seu drone.
O cenário atual é dominado por protocolos seriais como SBUS para sistemas tradicionais, CRSF para aplicações de alto desempenho e protocolos especializados como GHST e iBUS para ecossistemas específicos. Enquanto isso, os sistemas de RF que implementam esses protocolos continuam avançando, com o ExpressLRS estabelecendo novos padrões de desempenho e valor.
Ao selecionar um protocolo, considere suas necessidades específicas:
- Para corridas, priorize a latência mínima com ExpressLRS em altas taxas de pacotes
- Para freestyle, equilibre a capacidade de resposta e o alcance com taxas de pacotes moderadas
- Para longo alcance, concentre-se na confiabilidade e penetração com sistemas de 900MHz
- Para iniciantes, escolha sistemas com boa documentação e suporte da comunidade
Lembre-se de que a implementação adequada é tão importante quanto a seleção do protocolo. O posicionamento da antena, as configurações e a manutenção regular desempenham papéis cruciais na obtenção do desempenho ideal.
À medida que a tecnologia continua avançando, podemos esperar recursos ainda mais impressionantes dos futuros protocolos RC. A tendência de desenvolvimento de código aberto, taxas de atualização mais altas e integração mais estreita com outros sistemas promete um futuro empolgante para os sistemas de controle de drones.


