ドローンRCプロトコルの概要

ラジオコントロールプロトコルは、送信機とドローンの通信を可能にするデジタル言語です。私は様々な飛行条件下で各種RCシステムをテストした経験から、これらのプロトコルを理解することが性能と信頼性の最適化に不可欠だと学びました。この包括的ガイドでは、現在利用可能な主要なRCプロトコルとその技術的特性を探求し、それらを実装するハードウェアエコシステムではなく、通信規格自体に特に焦点を当てます。
RCプロトコル入門
ドローンのラジオコントロールシステムについて語る際、私たちはしばしば物理的な送信機と受信機に注目します。しかし、性能を真に決定づけるのは、データがどのようにパッケージ化され、送信され、解釈されるかを定義する通信規格である基盤となるプロトコルなのです。プロトコルを異なる言語のように考えてみてください。すべてが通信を可能にしますが、特定の状況では、より効率的、正確、または堅牢なものもあるのです。
私は今でも、各チャンネルに別々のワイヤーが必要で、信号干渉が常に懸念されていた基本的なPWM受信機で飛行していた初期の頃を覚えています。現代のデジタルプロトコルへの進化は、RCシステムの信頼性と機能を劇的に変え、かつては想像もできなかった機能を可能にしました。
RCプロトコルの進化
RC通信は数十年にわたって劇的に進化してきました:
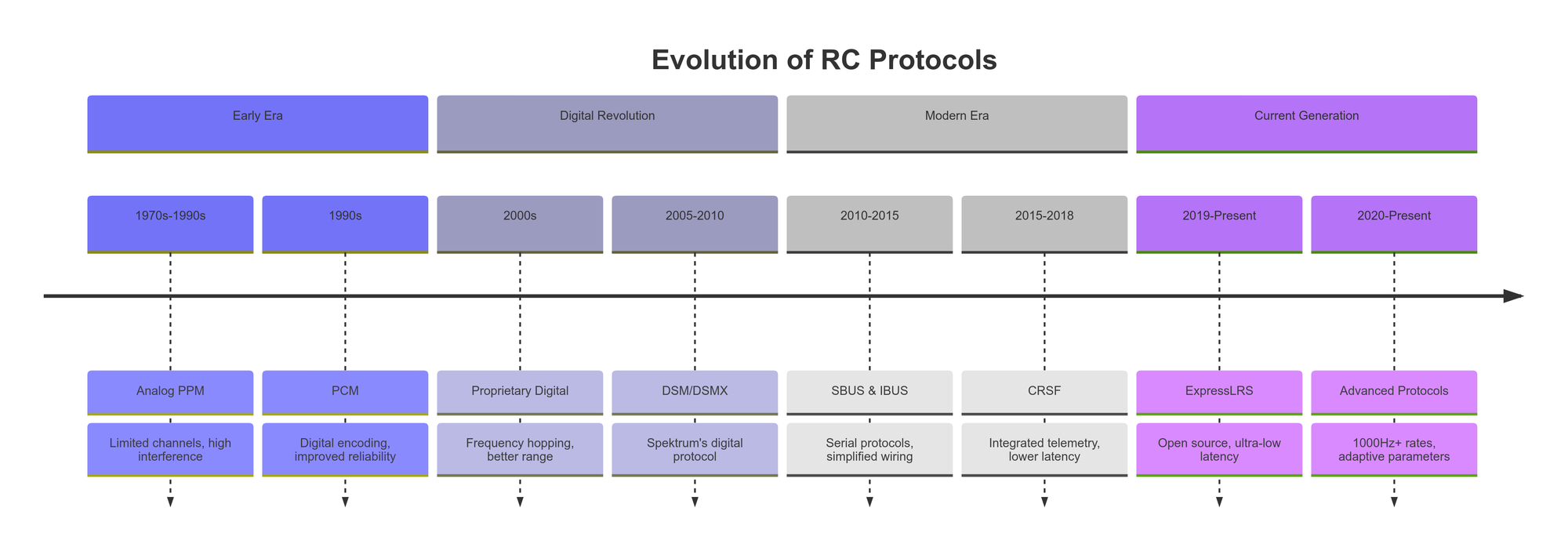
- 初期 (1970年代-1990年代): チャンネル数が限られ、干渉に弱いシンプルなアナログPPM (パルス位置変調)。
- デジタル革命 (2000年代): PCM (パルスコード変調) と初期の独自デジタルプロトコルの導入により、信頼性と機能が向上。これは画期的なことで、突然、飛行中の故障がはるかに少なくなりました。
- 現代 (2010年代): SBUS、CRSF、iBUSなどの洗練されたシリアルプロトコルの開発により、複数のチャンネル、テレメトリー、高度な機能が提供されるようになりました。
- 現世代 (2020年代): 先進的なプロトコルが、かつてない高いリフレッシュレートと範囲で性能の限界に挑戦。プロトコル設計の技術的改善により、ほんの数年前には民生機器では不可能だったパフォーマンスが実現しています。
プロトコルが重要な理由
選択するプロトコルは、飛行体験のいくつかの重要な側面に影響します:
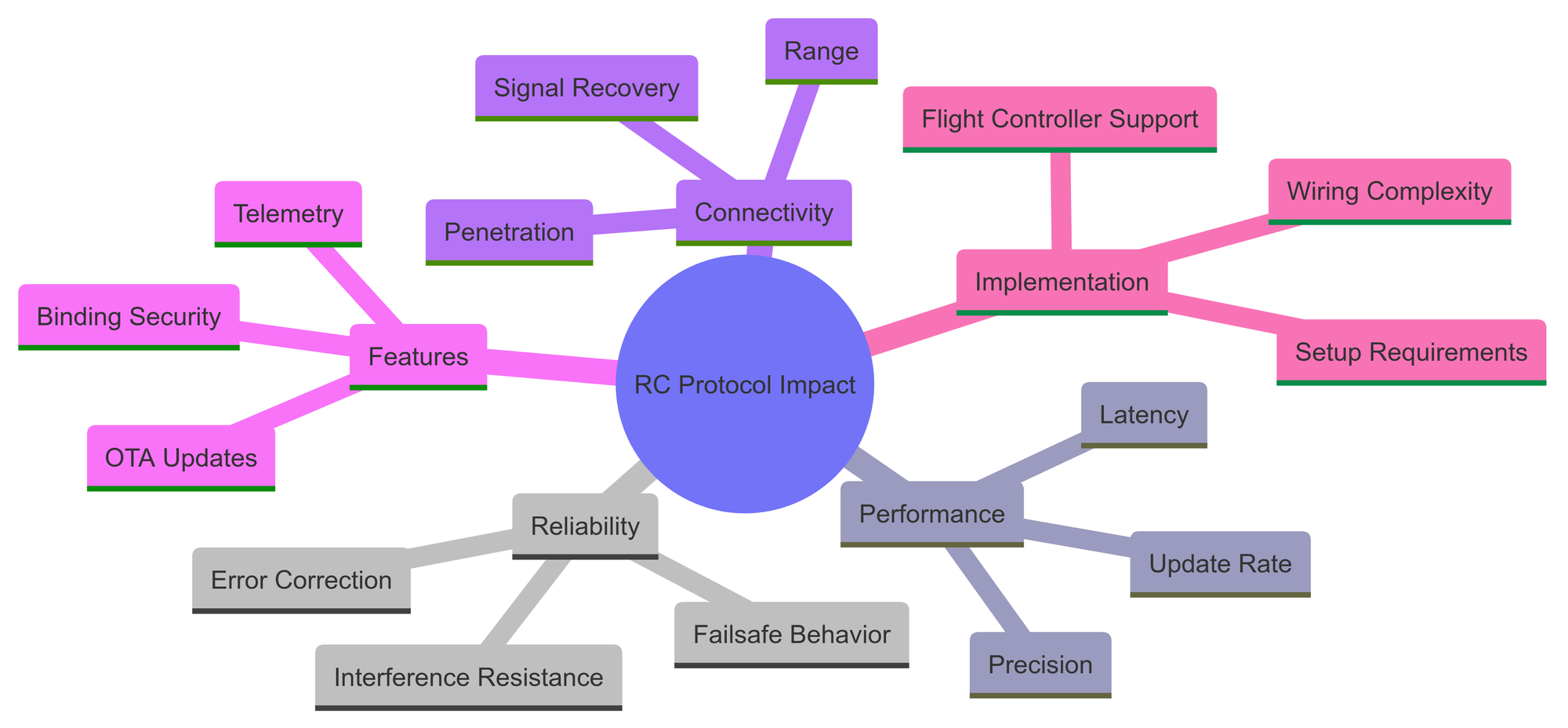
- レイテンシー: スティック操作がドローンの反応にどれだけ素早く反映されるか
- 範囲: 信頼できる制御を維持しながらどれだけ遠くまで飛行できるか
- 信頼性: 干渉や信号損失に対してリンクがどれだけ耐性があるか
- 機能: どのような追加機能が利用可能か (テレメトリー、無線更新など)
- ハードウェア要件: プロトコルを使用するために必要な機器
私は、プロトコルを切り替えることでドローンの性能がどのように変化するかを直接経験してきました。適切なプロトコルは、鈍重で反応の鈍いドローンと、あなたの思考の延長のように感じられるドローンとの違いを生み出すことができるのです。
プロトコルの基礎を理解する
特定のプロトコルに飛び込む前に、それらを区別する技術的概念を理解することが重要です。
重要な技術的概念
信号変調
情報がキャリア波にどのようにエンコードされるか:

- 周波数ホッピング拡散 (FHSS): 予め決められたパターンに従って高速に周波数を切り替え、干渉に対する耐性を向上させます。ほとんどの現代のプロトコルは、何らかの形のFHSSを使用しています。
- 直接拡散 (DSSS): 信号を広い帯域幅に拡散させ、狭帯域干渉に強くします。ドローン用途ではあまり一般的ではありません。
- 適応型周波数アジリティ: 周波数パターンを変更することで干渉を積極的に検出して回避する高度なシステム。私は、予測不可能なRFノイズのある都市環境で飛行する際に、これらが特に価値があると感じています。
データレートとパケット構造
情報がどのようにパッケージ化され、送信されるか:
| 概念 | 説明 | 性能への影響 |
|---|---|---|
| パケットレート | 1秒あたりに送信されるデータパケットの数 (Hz) | レートが高い = レイテンシーは低いが範囲は減少 |
| パケットサイズ | 各送信に含まれる情報量 | パケットが大きい = データ量は多いが送信時間が長い |
| エラー訂正 | エラーを検出して回復する方法 | より堅牢な訂正 = 信頼性は高いがレイテンシーが増加 |
| チャンネル分解能 | 制御値の精度 (ビット) | 分解能が高い = 制御がより正確だがパケットが大きくなる |
| フレーミング | パケットの構造化と識別方法 | 効率的なフレーミング = オーバーヘッドが少なく性能が向上 |
私はさまざまなパケットレートを広範に実験し、最適な設定は飛行スタイルによって大きく異なることがわかりました。レースでは、レイテンシーを最小限に抑えるために500Hz以上を好みますが、長距離クルージングでは、50Hz以下でも許容できる応答性を維持しつつ、より良い範囲を提供します。
リンク予算
無線リンクの全体的な電力バランス:

リンク予算を理解することは、私の長距離ビルドにとって非常に重要でした。送信電力を2倍にするよりも、アンテナを最適化したり、受信感度を向上させたりする方が、はるかに距離が伸びることを学びました。
プロトコル vs RFシステム vs 物理接続
関連するが異なる概念を区別することが重要です:
| 概念 | 説明 | 例 |
|---|---|---|
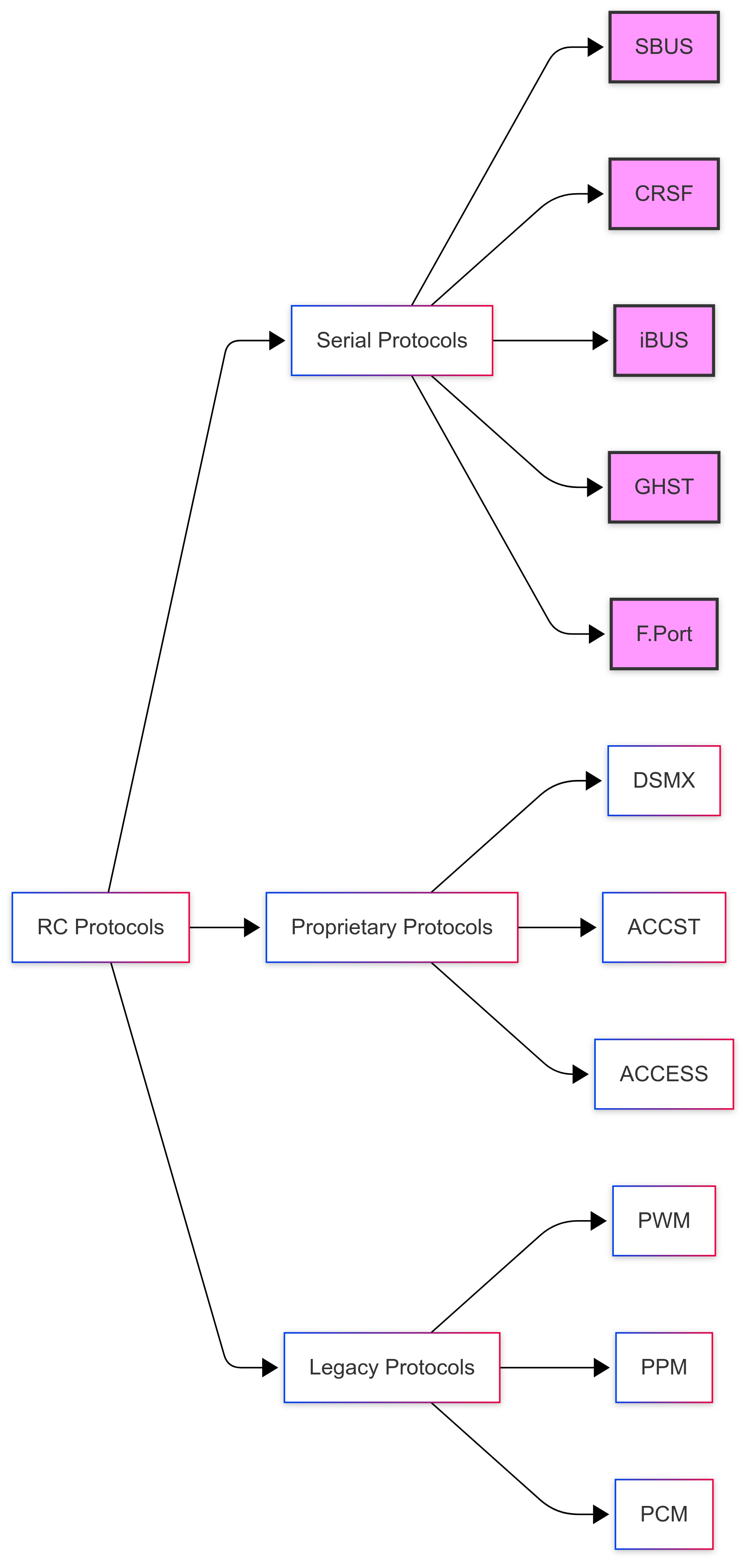
| プロトコル | データの構造化方法を定義する通信規格 | CRSF、SBUS、iBUS、GHST |
| RFシステム | 信号の送信に使用される無線周波数技術 | ExpressLRS、Crossfire、ACCST、DSMX |
| 物理接続 | 受信機がフライトコントローラーに接続する方法 | UART、PWM、I2C、SPI |
この区別は重要です。なぜなら、同じプロトコル(例えばCRSF)が異なるRFシステム(例えばTBS CrossfireとExpressLRS)で使用されることがあり、同じRFシステムが複数のプロトコルをサポートすることがあるからです。
主要なRCプロトコル
私の広範なテストと実世界での経験に基づいて、ドローンの世界で最も重要なプロトコルを見てみましょう。
プロトコル比較の概要
SBUS(シリアルバス)
FutabaによってSBUSが開発され、FrSkyなどに広く採用され、長年にわたって標準となっています。
技術的特性
- データレート: 100,000 bps
- 更新レート: 通常9ms(111Hz)
- チャンネル: 最大16の比例チャンネル + 2のデジタルチャンネル
- レイテンシ: 〜14ms エンドツーエンド(典型的)
- 信号タイプ: 反転UART シリアル
- テレメトリー: SBUS自体には含まれない(別途接続が必要)
長所
- 広範な互換性: 事実上すべてのフライトコントローラーでサポート
- シンプルさ: フライトコントローラーへの単線接続
- 信頼性: 無数のビルドで実績のある実績
制限事項
- 信号反転: F1/F3フライトコントローラーにはインバーターが必要(F4以降は内蔵インバーター)
- 中程度のレイテンシ: 新しいプロトコルほど反応が良くない
- 統合テレメトリーなし: テレメトリーデータには別の接続が必要
私は長年にわたって数十のビルドでSBUSを使用してきましたが、それは今でも堅実で信頼できる選択肢です。特に、SBUSを使用できないフライトコントローラーに出会ったことがないという普遍的な互換性を高く評価しています。
CRSF(Crossfire RF)
Team BlackSheepがCrossfireシステム用に開発し、後にExpressLRSに採用されたCRSFは、高性能RCリンクのゴールドスタンダードになりました。
技術的特性
- データレート: 420,000 bps
- 更新レート: 50Hzから1000Hzまで可変(実装による)
- チャンネル: 最大12チャンネル
- レイテンシ: 2ms(1000Hzの場合)まで低減可能
- 信号タイプ: 非反転UART シリアル
- テレメトリー: 統合された双方向通信
長所
- 低レイテンシ: 非常に反応の良い制御
- 統合テレメトリー: 同じ接続で包括的なデータフィードバック
- 高度な機能: LUAスクリプト、無線更新、モデルマッチングのサポート
- 柔軟な実装: 異なる特性を持つ複数のRFシステムで使用
制限事項
- 複雑さ: 設定オプションが多いと初心者には圧倒的
- ハードウェア要件: 利用可能なUARTを備えたフライトコントローラーが必要
- 実装のバリエーション: CRSFを使用する異なるシステムでは、機能が異なる場合がある
CRSFは2018年以来、本格的なビルドのプロトコルとして私の選択肢となっています。低レイテンシ、統合テレメトリー、高度な機能の組み合わせは、他の追随を許しません。このプロトコルの設計により、幅広いアプリケーションで優れたパフォーマンスを発揮できます。
iBUS
FlySkyによって開発されたiBUSは、統合テレメトリーを備えたシンプルなシリアルプロトコルを提供します。
技術的特性
- データレート: 115,200 bps
- 更新レート: 通常8ms(125Hz)
- チャンネル: 最大14チャンネル
- レイテンシ: 〜12ms エンドツーエンド(典型的)
- 信号タイプ: 非反転UART シリアル
- テレメトリー: 統合された双方向通信
長所
- 信号反転なし: すべてのフライトコントローラーで直接動作
- 統合テレメトリー: 制御とデータのためのシングルワイヤーソリューション
- シンプルさ: 最小限の設定で簡単なセットアップ
制限事項
- 限定的なエコシステム: 主にFlySky機器で使用
- 高度な機能が少ない: CRSFやGHSTと比較して
- 一般的ではない: コミュニティのサポートと開発が少ない
私はいくつかの低価格ビルドでiBUSを使用しましたが、そのコストパフォーマンスは見事です。非反転信号は、古いフライトコントローラーを使用する際に特に便利で、SBUSが必要とする信号インバーターの必要性がなくなります。
GHST(Ghost)
ImmersionRCがGhostシステム用に開発したGHSTは、パフォーマンス特性の優れたバランスを提供します。
技術的特性
- データレート: 420,000 bps
- 更新レート: 50Hzから250Hzまで可変
- チャンネル: 最大12チャンネル
- レイテンシー: 5ms程度
- 信号タイプ: 非反転UARTシリアル
- テレメトリー: 双方向通信を統合
長所
- 非常に低いレイテンシー: 優れた応答性
- 良好な範囲: 平均以上の距離性能
- クリーンな実装: 帯域幅を効率的に使用する、よく設計されたプロトコル
- オープンなドキュメント: 透明性のあるプロトコル仕様
制限事項
- 限定的な採用: CRSFやSBUSほど広く使用されていない
- ハードウェアオプションが少ない: 互換性のある機器の選択肢が限られている
- コミュニティ開発が少ない: ツールやリソースのエコシステムが小さい
私はGHSTを広範囲にテストし、その技術的な実装に感銘を受けました。このプロトコルは、レイテンシーと範囲の間で優れたバランスを達成していますが、一部の競合他社ほどのシェアは獲得していません。
DSMX
Spektrum社によって開発されたDSMXは、米国および完成品モデルで広く使用されています。
技術的特性
- データレート: 独自
- 更新レート: 11ms (91Hz) または 22ms (45Hz)
- チャンネル: 最大12チャンネル
- レイテンシー: 約14ms (11msフレームレート) または約25ms (22msフレームレート)
- 信号タイプ: 独自シリアル
- テレメトリー: ほとんどの実装で限定的
長所
- RTFモデルで広く使用: 完成品ドローンで一般的
- 米国市場での強力な存在感: 北米でよくサポートされている
- バインディングの簡単さ: 簡単な受信機バインディングプロセス
制限事項
- クローズドエコシステム: サードパーティのサポートが限られた独自プロトコル
- 高いレイテンシー: 新しいプロトコルほど応答性が高くない
- 限定的なテレメトリー: CRSFやGHSTと比較して基本的
私はDSMXを他のプロトコルほど広範囲に使用したことはありませんが、いくつかのSpektrum搭載ドローンを扱ってきました。このプロトコルは信頼性がありますが、特にレイテンシーと機能セットの点で、新しい代替品と比較すると時代遅れに感じられます。
F.Port
FrSky社によって開発されたF.Portは、SBUS制御とSmartPortテレメトリーを1つの接続に統合します。
技術的特性
- データレート: 115,200 bps
- 更新レート: 通常9ms (111Hz)
- チャンネル: 最大16比例 + 2デジタル
- レイテンシー: 約14msエンドツーエンド (一般的)
- 信号タイプ: 半二重UART
- テレメトリー: 双方向通信を統合
長所
- シングルワイヤーソリューション: 制御とテレメトリーを組み合わせる
- 互換性: 既存のFrSkyエコシステムで動作
- リソース効率: フライトコントローラーのUARTポートを解放
制限事項
- FrSky固有: FrSky機器に限定
- セットアップの複雑さ: 適切に設定するのが難しい場合がある
- 人気の低下: 新しいプロトコルに取って代わられつつある
私は、いくつかのFrSkyビルドを別々のSBUS/SmartPortからF.Portに変換しました。シングルワイヤーソリューションはエレガントですが、受信機と送信機の両方にファームウェアの更新が必要になることが多く、予想以上に設定が面倒だと感じました。
FrSkyプロトコル
FrSkyは、ドローンコミュニティでの広範な使用により、特別な言及に値するいくつかのプロトコルを開発しています。
ACCST (Advanced Continuous Channel Shifting Technology)
FrSkyの元のデジタルプロトコルで、広く採用されました:
- データレート: 可変
- 更新レート: 通常9ms (111Hz)
- チャンネル: 最大16チャンネル (D16モード)
- レイテンシー: 約14msエンドツーエンド (一般的)
- 信号タイプ: 2.4GHz FHSS
- テレメトリー: 別のSmartPort接続で利用可能
バリエーション:
- D8: 古い受信機と互換性のある8チャンネルモード
- D16: 拡張機能を備えた16チャンネルモード
- LR12: チャンネル数を減らした長距離バリアント
私は何年もACCST D16を使用し、日常的なフライトに信頼できるプロトコルであることがわかりました。最新のオプションほど高度ではありませんが、幅広いフライトコントローラーで一貫したパフォーマンスと良好な互換性を提供しました。
ACCESS (Advanced Communication Control, Elevated Spread Spectrum)
2019年にACCSTの代替として導入されたFrSkyの新しいプロトコル:
- データレート: ACCSTより高い
- 更新レート: 通常9ms (111Hz)
- チャンネル: 最大24チャンネル
- レイテンシー: 約12-14msエンドツーエンド (一般的)
- 信号タイプ: セキュリティ強化された2.4GHz FHSS
- テレメトリー: より高い帯域幅で統合
主な特徴:
- セキュリティ強化: 不正接続を防ぐために固有のIDバインディングを使用
- 無線更新: 送信機から受信機のファームウェアを更新する機能
- スペクトラム分析: 干渉を避けるための内蔵周波数スキャン
- スマートマッチ: 受信機登録による簡素化されたバインディングプロセス
私のACCESSの経験は混在しています。セキュリティ機能の強化とOTAアップデートは価値がありますが、互換性の問題により、ACCSTからの移行は混乱しました。適切に設定されている場合、ACCESSはACCSTと比較して、範囲と信頼性の点でわずかに優れたパフォーマンスを発揮しますが、典型的なフライトシナリオではその違いは劇的ではありません。
レガシープロトコル
現代のドローンではあまり一般的ではありませんが、これらのプロトコルは歴史的な文脈を理解するために理解する価値があります:
PWM (パルス幅変調)
- 特徴: チャンネルごとに1本のワイヤー、直接サーボ制御
- 制限事項: 配線が大きい、チャンネル数が限られる、干渉を受けやすい
- 現在の使用状況: 直接サーボ接続を除き、最新のドローンではほとんど使用されていない
PPM (パルス位置変調)
- 特徴: 1本のワイヤーで複数のチャンネル、アナログ信号
- 制限事項: チャンネル数が限られる (通常8チャンネル)、中程度のレイテンシ
- 現在の使用状況: 基本的または古い機器で時々見られる
PCM (パルスコード変調)
- 特徴: 制御信号のデジタルエンコーディング
- 利点: PPMよりも優れたエラー検出
- 現在の使用状況: 新しいデジタルプロトコルに大部分が取って代わられた
プロトコルのパフォーマンス比較
様々な条件下で広範なテストを行った結果、主要なプロトコルの重要なパフォーマンス指標の比較は以下の通りです。
レイテンシの比較
スティックの動きからフライトコントローラーの応答までを測定:
| プロトコル | 最小レイテンシ | 一般的なレイテンシ | 備考 |
|---|---|---|---|
| ExpressLRS | 2ms | 4-10ms | パケットレートにより異なる (1000Hz-50Hz) |
| GHST | 5ms | 7-12ms | パケットレートにより異なる (250Hz-50Hz) |
| CRSF (Crossfire) | 6ms | 10-15ms | パケットレートにより異なる (150Hz-50Hz) |
| iBUS | 10ms | 12-15ms | 比較的一定 |
| F.Port | 12ms | 14-16ms | SBUSと同様 |
| SBUS | 12ms | 14-16ms | 比較的一定 |
| DSMX | 14ms | 14-25ms | フレームレート設定による |
私の経験では、レイテンシの差は約5msで顕著になります。500HzのExpressLRSでの飛行は、特に素早い操作や修正の際に、SBUSよりも明らかに応答性が良く感じられます。
到達距離の比較
同等の出力 (100mW) と標準アンテナでのテストに基づく:
| プロトコル | 一般的な到達距離 | 最大到達距離 | 備考 |
|---|---|---|---|
| ExpressLRS 2.4GHz (50Hz) | 5-10km | 30km以上 | 到達距離対レイテンシ比が優れている |
| TBS Crossfire 900MHz | 5-10km | 40km以上 | 長距離用の業界標準 |
| ExpressLRS 900MHz (25Hz) | 10-20km | 50km以上 | 現在の到達距離チャンピオン |
| GHST 2.4GHz | 3-5km | 10km以上 | 到達距離とレイテンシのバランスが良い |
| FrSky R9 900MHz | 3-5km | 15km以上 | 到達距離は良いが、新しいシステムほど信頼性が高くない |
| FrSky ACCST 2.4GHz | 1-2km | 5km | ほとんどの飛行に適している |
| FlySky AFHDS 2A | 0.5-1.5km | 3km | 制限はあるが、視界内飛行には十分 |
| DSMX | 1-2km | 3km | ほとんどの飛行に適している |
これらの到達距離は、障害物のない見通しの良い状態を想定しています。実際の到達距離は、障害物、干渉、アンテナの位置、その他の要因の影響を受けます。
信頼性の比較
様々な環境での飛行経験に基づく:
| プロトコル | 干渉耐性 | フェイルセーフの信頼性 | 全体的な堅牢性 |
|---|---|---|---|
| ExpressLRS | 優秀 | 優秀 | 優秀 |
| TBS Crossfire | 優秀 | 優秀 | 優秀 |
| GHST | 非常に良い | 非常に良い | 非常に良い |
| FrSky R9 | 良い | 良い | 良い |
| F.Port | 良い | 良い | 良い |
| SBUS | 良い | 良い | 良い |
| iBUS | 良い | 良い | 良い |
| DSMX | 良い | 良い | 良い |
| FrSky ACCST | 普通 | 良い | 普通 |
| FlySky AFHDS 2A | 普通 | 普通 | 普通 |
私の経験では、ExpressLRSとCrossfireは、厳しいRF環境でも非常に信頼性が高いです。ある印象的な飛行では、無線塔の近くでExpressLRSリンクが安定した接続を維持していたのに対し、友人のACCSTシステムは複数回のフェイルセーフを経験しました。
機能比較
| プロトコル | テレメトリー | OTAアップデート | バインド方法 | 高度な機能 |
|---|---|---|---|---|
| CRSF | 包括的 | あり | 可変 | 豊富 (LUAスクリプト、モデルマッチ、動的出力) |
| ExpressLRS | 設定可能 | あり | バインドフレーズ | 豊富 (動的出力、WiFiアップデート) |
| GHST | 包括的 | あり | ボタン押し | 良い (モデルマッチ、動的出力) |
| F.Port | 包括的 | 制限あり | ボタン押し | FrSkyエコシステムに限定 |
| FrSky (SmartPort) | 包括的 | 制限あり | ボタン押し | FrSkyエコシステムに限定 |
| iBUS | 基本的 | なし | ボタン押し | 制限あり |
| SBUS | なし (別途) | なし | ボタン押し | 制限あり |
| DSMX | 基本的 | なし | ボタン押し | 制限あり (モデルマッチ) |
CRSF/ExpressLRSのような新しいプロトコルと古い標準との機能差は大きいです。無線経由でファームウェアを更新し、包括的なテレメトリーにアクセスできる機能は、私のドローンとのやり取りを変えました。
適切なプロトコルの選択
多くの選択肢があるため、適切なプロトコルを選ぶのは圧倒されるかもしれません。ここでは、様々な飛行シナリオに基づいた実用的なアドバイスを紹介します。
レース用
優先事項: 最小のレイテンシと混雑したRF環境での信頼性の高いパフォーマンス
- ベストな選択: 500Hz以上のExpressLRS
- 代替案: 250HzのGHST
- 予算重視の選択: iBUS (FlySky機器を使用している場合)
レースでは、私は専ら500HzのExpressLRSを使用しています。超低レイテンシと優れた干渉耐性の組み合わせは、特に多数のビデオトランスミッターと制御リンクが同時に動作する混雑したレース環境では他に類を見ません。
フリースタイル用
優先事項: 応答性と到達距離のバランスの取れた性能
- ベストな選択: 250HzのExpressLRS
- 代替案: 150HzのCRSF (Crossfire)
- 予算重視の選択: FrSky機器を使用したF.PortまたはSBUS
フリースタイル飛行では、レースほど絶対的
長距離用
優先事項: 許容可能な遅延で最大限の信頼できる範囲
- ベストチョイス: ExpressLRS 900MHz at 25-50Hz
- 代替案: TBS Crossfire 900MHz
- 予算オプション: FrSky R9 (制限あり)
専用の長距離ビルドでは、25HzでのExpressLRS 900MHzが無敵であることが証明されています。効率的なプロトコル設計、LoRa変調、低パケットレートの組み合わせにより、制御の応答性を維持しながら、並外れた範囲を実現します。
初心者向け
優先事項: シンプルさ、信頼性、十分なパフォーマンス
- ベストチョイス: ExpressLRS at 100Hz (適切なガイダンスあり)
- 代替案: FrSky機器でのSBUSまたはF.Port
- 予算オプション: FlySky機器でのiBUS
ExpressLRSは最高のパフォーマンスを提供しますが、その設定オプションは初心者を圧倒する可能性があります。新しいパイロットを支援する場合は、ExpressLRSでセットアップ支援を提供するか、SBUSを使用したFrSkyなどのより単純なシステムを推奨してください。これにより、複雑さを抑えながら優れたパフォーマンスが得られます。
シネマティック フライング用
優先事項: スムーズな制御と信頼性の高いリンク
- ベストチョイス: ExpressLRS at 100Hz or 50Hz
- 代替案: CRSF (Crossfire) at 50Hz
- 予算オプション: SBUSまたはF.Port
シネマティックフライングは、急速な応答ではなく、スムーズな制御入力の恩恵を受けます。低いパケットレート(50〜100Hz)は、範囲と信頼性を最大化しながら、十分な応答性を提供します。シネマティックビルドには、多くの場合、50Hz ExpressLRSを使用します。これにより、スムーズな制御を維持しながら、優れた範囲を提供します。
プロトコルの問題のトラブルシューティング
適切に実装されていても、RCプロトコルの問題が発生する可能性があります。一般的な問題を診断して解決する方法は次のとおりです。
一般的な問題と解決策
断続的な接続
症状: ランダムなフェイルセーフ、制御の不具合、またはテレメトリーのドロップアウト
考えられる原因と解決策:
- 干渉:
- ビデオ送信機のアンテナを受信機のアンテナから離す
- 電源分配基板をシールドする
- 電源リードにフェライトコアを使用する
- アンテナの問題:
- アンテナの損傷を確認する
- 適切なアンテナの向きを確認する
- アンテナの接続が安全であることを確認する
- 電源の問題:
- 受信機にクリーンな5Vが供給されていることを確認する
- 電源入力にコンデンサを追加する
- 負荷時の電圧低下を確認する
かつて、VTXアンテナが受信機のアンテナに近すぎることが原因で、断続的な接続の問題を数週間追跡したことがあります。それらをわずか3cmさらに離すことで、問題は完全に解決しました。
制御応答なし
症状: 送信機は接続されているが、ドローンからの応答がない
考えられる原因と解決策:
- プロトコルの不一致:
- フライトコントローラで正しいプロトコルが選択されていることを確認する
- 送信機モジュールの設定を確認する
- UART設定:
- UARTがシリアルRXに適切に割り当てられていることを確認する
- TX/RX接続が正しいことを確認する
- 信号反転:
- 反転設定がプロトコルの要件と一致するかどうかを確認する
- ハードウェアインバーターを使用している場合はそれを確認する
- チャンネルマッピング:
- チャンネルが正しくマッピングされていることを確認する
- AETRとTAERの順序の問題を確認する
私が遭遇する最も一般的な「応答なし」の問題は、UARTの割り当てが正しくないことです。接続したUARTが、ポートタブでシリアルRX用に適切に設定されていることを常に再確認してください。
テレメトリーの問題
症状: テレメトリーデータがないか、断続的なテレメトリー
考えられる原因と解決策:
- 接続の欠落:
- 双方向接続が必要なプロトコルの場合、それを確認する
- テレメトリープロトコルの場合、TXパッドが接続されていることを確認する
- 設定の問題:
- 送信機でテレメトリーを有効にする
- テレメトリー比の設定を確認する(ExpressLRSの場合)
- ソフトウェアの不一致:
- 送信機と受信機のファームウェアを更新する
- 互換性のあるバージョンを確認する
ExpressLRSの場合、信頼性の高いデータを得るためにはテレメトリー比が重要であることがわかっています。長距離飛行では、テレメトリー頻度よりも制御リンクの安定性を優先するために、1:128の控えめな比率を使用します。
バインディングの難しさ
症状: 受信機を送信機にバインドできない
考えられる原因と解決策:
- プロトコル固有の問題:
- ExpressLRS: 一致するバインディングフレーズとファームウェアバージョンを確認する
- Crossfire: バインディングにLUAスクリプトを使用する
- FrSky: EU/FCCバージョンの互換性を確認する
- ハードウェアの問題:
- バインディング中に受信機に適切に電力が供給されていることを確認する
- 可能な場合は物理的なバインドボタンを試す
- 距離の問題:
- バインディング中は送信機と受信機を近づける
- 干渉の可能性のある原因を取り除く
バインディングの問題は、多くの場合プロトコル固有です。 ExpressLRSでは、私が遭遇したほとんどのバインディングの問題は、ファームウェアのバージョンまたはバインディングフレーズの不一致に関連しています。送信機と受信機の間で、これらが正確に一致していることを常に確認してください。
診断ツールと技術
受信機の信号品質インジケーター
最新のプロトコルのほとんどは、信号品質メトリックを提供します:
- RSSI(受信信号強度インジケーター):
- 全体的な信号強度を測定する
- 通常、パーセンテージで表示される
- 50%を下回る値は、潜在的な問題を示している
- LQ(リンク品質):
- パケット成功率を測定する
- デジタルシステムではRSSIよりも有用
- 70%を下回る値は調査が必要
- RFモード:
- 現在の動作モードを示す(例:ExpressLRSは信号に基づいて250Hz/50Hzを切り替える)
- 動的システムが適切に機能していることを確認するのに役立つ
ExpressLRSおよびCrossfireシステムでは、RSSIよりもリンクの健全性をより意味のある指標を提供するため、LQに大きく依存しています。飛行中のLQ傾向を監視することで、潜在的な問題の早期警告を提供できます。
フライトコントローラの診断
フライトコントローラは、貴重な診断情報を提供できます:
- 受信機タブ:
- チャンネルの動きがスティック入力と一致することを確認する
- 信号のクリッピングや異常値がないか確認する
- チャンネルマッピングが正しいことを確認する
- CLIコマンド:
status- アクティブなシリアルRXプロバイダーを表示するrxrange- チャンネルの範囲を表示するset serialrx_- 現在のシリアルRX設定を一覧表示する
- Blackboxロギング:
- グリッチや不整合についてRCコマンドデータを分析する
- レイテンシー評価のためにRCデータとジャイロ応答を比較する
微妙な制御の問題のトラブルシューティングを行うとき、私はしばしばBlackboxログを使用してRCコマンドデータを分析します。これは、フライト中にすぐには明らかではなかったRCスムージングの設定ミスなどの問題を特定して解決するのに役立ちました。
RCプロトコルの未来
RCプロトコルの状況は急速に進化し続けています。以下は、私が注目している動向と展開です。
現在のトレンド
- 更新レートの向上: 低レイテンシーへのプッシュは続いており、現在は1000Hzが利用可能で、将来的にはさらに高いレートになる可能性があります。
- オープンソース開発: ExpressLRSのようなコミュニティ主導のプロジェクトは、独自システムよりも速いペースで革新を進めています。
- 周波数の柔軟性: 複数の周波数帯(2.4GHz、900MHz、868MHz)で動作できるシステムは、地域やアプリケーションに応じた柔軟性を提供します。
- デジタルFPVとの統合: 制御システムとビデオシステムのより緊密な統合により、アンテナや周波数帯を共有できる可能性があります。
- テレメトリーの拡張: ビデオリンク統計や高度な飛行パラメータを含む、より包括的なテレメトリーデータ。
新しいテクノロジー
RCプロトコルをさらに変革する可能性のある、いくつかの有望なテクノロジーが登場しています:
- AI強化信号処理: リアルタイムでRF環境に適応する機械学習アルゴリズム。
- メッシュネットワーキング: 複数のドローンが信号を中継し、有効範囲を拡張する分散ネットワーク。
- 認知無線: 利用可能なチャネルを自動的に検出し、それに応じて送信パラメータを変更するシステム。
- 量子耐性暗号: 量子コンピューティングが進歩するにつれ、重要なアプリケーションには新しいセキュリティ対策が必要になります。
- ソフトウェア無線(SDR): ソフトウェアアップデートで再構成可能なより柔軟な無線システム。
FAQ: RCプロトコルに関するよくある質問
一般的なプロトコルの質問
プロトコルの違いがバッテリー寿命に影響しますか?
はい、ただしドローン側ではわずかです。パケットレートが高いと受信機の消費電力が少し増えますが、モーターの消費電力に比べるとその差は無視できるほどです。送信機側では、高出力・高パケットレートのシステムほどバッテリーの消耗が速くなるため、影響がより顕著になる可能性があります。
同じドローンで複数のプロトコルを使用できますか?
技術的には可能ですが(例えば、あるプロトコルで制御し、別のプロトコルでテレメトリーを行う)、複雑さが増し、干渉の可能性があるため、一般的にはお勧めできません。最新の統合プロトコルを使用すれば、このようなアプローチは不要になります。
プロトコルはビデオ伝送にどのように影響しますか?
制御とビデオは別のシステムですが、干渉によって互いに影響を与える可能性があります。DJI O3やWalksnailなどの先進的なシステムでは、制御とビデオ伝送の統合が始まっており、より良い連携と干渉の低減が図られています。
RCプロトコルには法的な制限がありますか?
はい、周波数の使用と出力電力は国によって異なる規制があります。特に900MHzシステムは世界的に周波数割り当てが異なるため(EUでは868MHz、USでは915MHz)、必ず現地の規制を確認してください。
技術的なプロトコルの質問
RSSIとLQの違いは何ですか?
RSSI(Received Signal Strength Indicator)は生の信号電力を測定し、LQ(Link Quality)は正常に受信されたパケットの割合を測定します。デジタルシステムでは、LQの方が通信の信頼性を直接示すため、一般的により有用です。
パケットレートはレイテンシーと範囲にどのように影響しますか?
パケットレートが高いとレイテンシーは減りますが、エラー訂正の時間が少なくなり、パケットあたりのエネルギーが低くなるため、通常は範囲が狭くなります。そのため、長距離飛行では低いパケットレート(25~50Hz)が使用され、レースでは高いレート(500Hz以上)が使用されるのです。
RSSI/LQが良好なのにフェイルセーフが発生するのはなぜですか?
これにはいくつかの要因があります。特定の周波数での干渉、一時的な信号遮断、受信機のハードウェアの問題、電源の問題などです。RSSIが良好でも、すべてのパケットが正しく受信されているとは限りません。
より良いアンテナでプロトコルのパフォーマンスを向上させることはできますか?
もちろんです。アンテナの品質、タイプ、配置によって、範囲と信頼性は大きく影響を受けます。重要なアプリケーションでは、異なる方向に複数のアンテナを使用するダイバーシティシステムを使用すると、最高のパフォーマンスが得られます。
プロトコル選択の質問
ExpressLRSは他のプロトコルよりも本当に優れているのですか?
ほとんどの指標(レイテンシー、範囲、柔軟性)において、そうです。オープンソースであるため、急速な開発と最適化が可能になっています。ただし、他のプロトコルは、エコシステムの統合やシンプルさなど、特定の分野で優位性を発揮する可能性があります。
長距離用には2.4GHzと900MHzのどちらを選ぶべきですか?
900MHzは周波数が低いため、一般的に貫通性と範囲に優れていますが、2.4GHzシステムでも設定を最適化すれば印象的な範囲を実現できます。最大範囲が優先事項であり、900MHzがお住まいの地域で合法である場合は、通常はそちらの方が良い選択肢です。
干渉に対する耐性が最も高いプロトコルはどれですか?
ExpressLRSとTBS Crossfireは、洗練された周波数ホッピングとエラー訂正により、ここで優れています。特に、高いパケットレート(250Hz以上)のExpressLRSは、レースイベントのような混雑したRF環境で非常に優れています。
SBUSから新しいプロトコルにアップグレードする価値はありますか?
ほとんどのパイロットにとって、はいです。レイテンシー、テレメトリー統合、信頼性の向上は顕著です。最大の利点は、RFシステム(例えばExpressLRSへ)と受信機とフライトコントローラー間のプロトコル(例えばCRSFへ)の両方をアップグレードすることで得られます。
結論
RCプロトコルは、過去のシンプルなアナログシステムから、今日の洗練されたデジタル通信へと劇的に進化してきました。これらのプロトコルを理解することは、ドローンのパフォーマンスと信頼性を最適化するために不可欠です。
現在の状況は、従来のシステム用のSBUSのようなシリアルプロトコル、高性能アプリケーション用のCRSF、特定のエコシステム用のGHSTやiBUSのような専用プロトコルが主流となっています。一方、これらのプロトコルを実装するRFシステムも進化を続けており、ExpressLRSがパフォーマンスと価値の新たな基準を設定しています。
プロトコルを選択する際は、特定のニーズを考慮してください:
- レーシングでは、高いパケットレートでExpressLRSを使用し、最小のレイテンシーを優先します。
- フリースタイルでは、適度なパケットレートで応答性と範囲のバランスを取ります。
- 長距離では、900MHzシステムで信頼性と貫通性に重点を置きます。
- 初心者は、ドキュメントとコミュニティのサポートが充実したシステムを選びましょう。
プロトコルの選択と同様に、適切な実装も重要であることを忘れないでください。アンテナの配置、設定、定期的なメンテナンスは、最適なパフォーマンスを実現するために重要な役割を果たします。
技術の進歩に伴い、将来のRCプロトコルにはさらに印象的な機能が期待できます。オープンソース開発、高い更新レート、他のシステムとのより緊密な統合への傾向は、ドローン制御システムにとってエキサイティングな未来を約束しています。


