Panoramica dei protocolli RC per droni

I protocolli di radiocontrollo sono i linguaggi digitali che consentono al tuo trasmettitore di comunicare con il tuo drone. Dopo anni di test di vari sistemi RC in diverse condizioni di volo, ho imparato che comprendere questi protocolli è fondamentale per ottimizzare le prestazioni e l'affidabilità. Questa guida completa esplora i principali protocolli RC disponibili oggi e le loro caratteristiche tecniche, concentrandosi specificamente sugli standard di comunicazione piuttosto che sugli ecosistemi hardware che li implementano.
Introduzione ai protocolli RC
Quando parliamo di sistemi di radiocontrollo per droni, spesso ci concentriamo sui trasmettitori e ricevitori fisici. Tuttavia, è il protocollo sottostante - lo standard di comunicazione che definisce come i dati vengono impacchettati, trasmessi e interpretati - che determina veramente le prestazioni. Pensa ai protocolli come a lingue diverse: mentre tutti consentono la comunicazione, alcuni sono più efficienti, precisi o robusti di altri in situazioni specifiche.
Ricordo ancora i miei primi giorni di volo con i ricevitori PWM di base, dove ogni canale richiedeva un filo separato e le interferenze del segnale erano una preoccupazione costante. L'evoluzione verso i moderni protocolli digitali ha trasformato l'affidabilità e le capacità dei sistemi RC, consentendo funzionalità un tempo inimmaginabili.
L'evoluzione dei protocolli RC
La comunicazione RC si è evoluta drasticamente nel corso dei decenni:
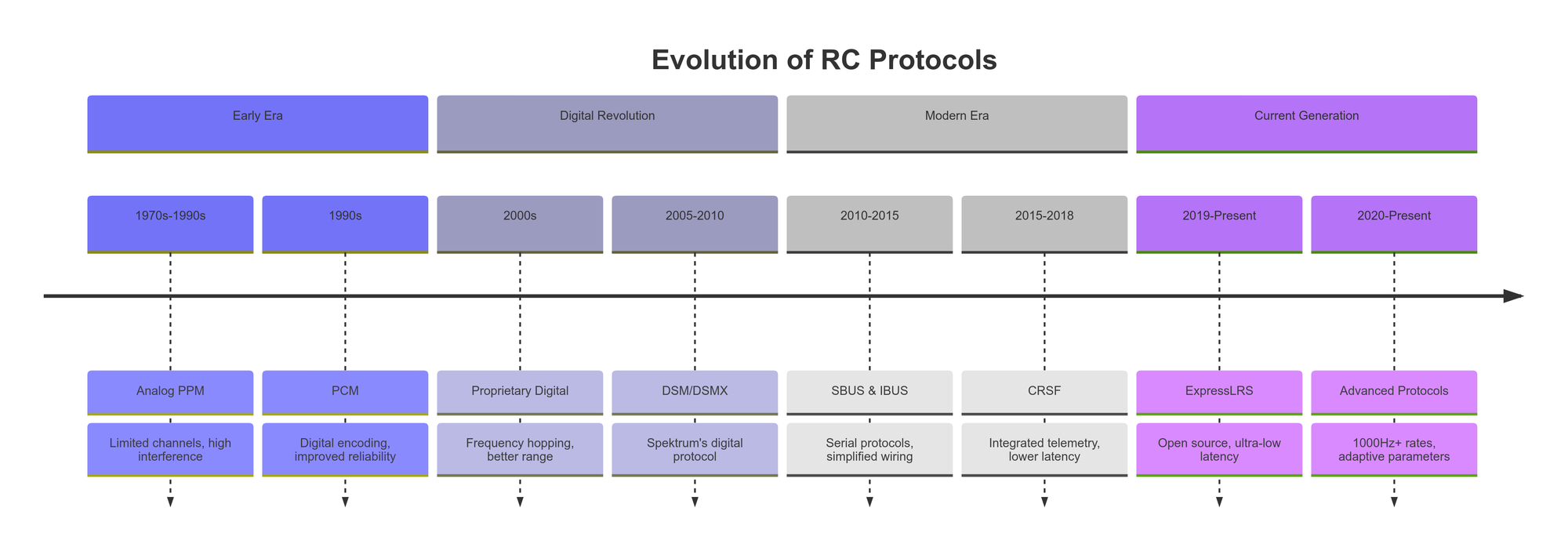
- Primi giorni (anni '70-'90): Semplice PPM analogico (Pulse Position Modulation) con canali limitati e suscettibilità alle interferenze.
- Rivoluzione digitale (anni 2000): Introduzione del PCM (Pulse Code Modulation) e dei primi protocolli digitali proprietari con migliore affidabilità e funzionalità. Questo è stato un cambiamento epocale: improvvisamente, i guasti in volo sono diventati molto meno comuni.
- Era moderna (anni 2010): Sviluppo di sofisticati protocolli seriali come SBUS, CRSF e iBUS, che offrono canali multipli, telemetria e funzionalità avanzate.
- Generazione attuale (anni 2020): Protocolli avanzati che spingono i limiti delle prestazioni con frequenze di aggiornamento e portata senza precedenti. I miglioramenti tecnici nella progettazione dei protocolli hanno permesso prestazioni che non erano possibili con le apparecchiature consumer solo pochi anni fa.
Perché i protocolli sono importanti
Il protocollo che scegli influisce su diversi aspetti critici della tua esperienza di volo:
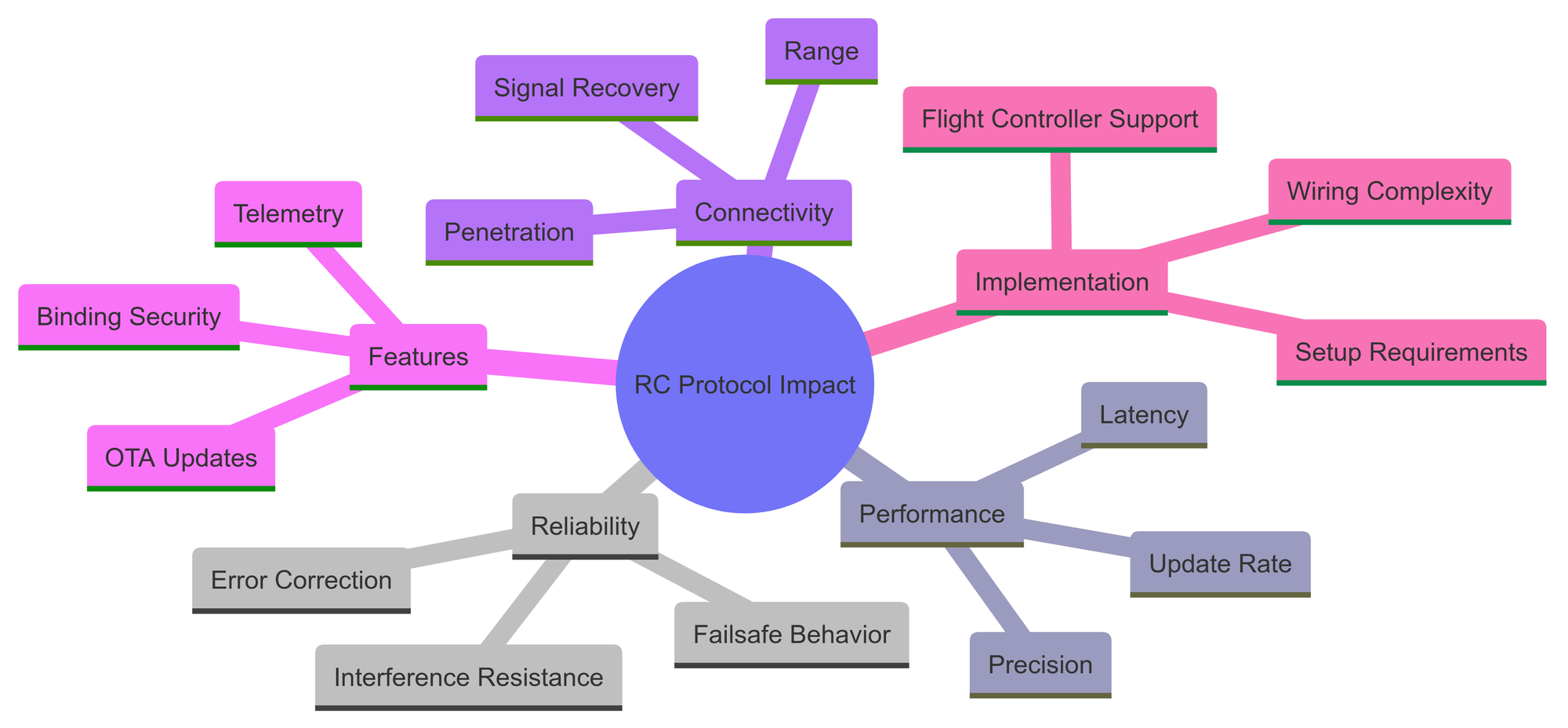
- Latenza: Quanto velocemente i movimenti dello stick si traducono nella risposta del drone
- Portata: Quanto lontano puoi volare mantenendo un controllo affidabile
- Affidabilità: Quanto il collegamento è resistente alle interferenze e alla perdita del segnale
- Funzionalità: Quali capacità aggiuntive sono disponibili (telemetria, aggiornamenti over-the-air, ecc.)
- Requisiti hardware: Quali apparecchiature sono necessarie per utilizzare il protocollo
Ho sperimentato in prima persona come il cambio di protocollo possa trasformare le prestazioni di un drone. Il protocollo giusto può fare la differenza tra un drone che sembra lento e poco reattivo e uno che sembra un'estensione dei tuoi pensieri.
Comprendere i fondamenti del protocollo
Prima di immergersi in protocolli specifici, è importante comprendere i concetti tecnici che li differenziano.
Concetti tecnici chiave
Modulazione del segnale
Come le informazioni vengono codificate sull'onda portante:

- Frequency Hopping Spread Spectrum (FHSS): Cambia rapidamente le frequenze secondo uno schema predeterminato, migliorando la resistenza alle interferenze. La maggior parte dei protocolli moderni utilizza una qualche forma di FHSS.
- Direct Sequence Spread Spectrum (DSSS): Diffonde il segnale su una banda larga, rendendolo resistente alle interferenze a banda stretta. Meno comune nelle applicazioni per droni.
- Adaptive Frequency Agility: Sistemi avanzati che rilevano attivamente ed evitano le interferenze cambiando gli schemi di frequenza. Ho trovato questi particolarmente utili quando si vola in ambienti urbani con rumore RF imprevedibile.
Velocità di trasmissione dati e struttura dei pacchetti
Come le informazioni vengono impacchettate e trasmesse:
| Concetto | Descrizione | Impatto sulle prestazioni |
|---|---|---|
| Packet Rate | Numero di pacchetti dati inviati al secondo (Hz) | Frequenze più alte = latenza inferiore ma portata ridotta |
| Packet Size | Quantità di informazioni in ogni trasmissione | Pacchetti più grandi = più dati ma tempo di trasmissione più lungo |
| Error Correction | Metodi per rilevare e recuperare gli errori | Correzione più robusta = migliore affidabilità ma latenza aumentata |
| Channel Resolution | Precisione dei valori di controllo (bit) | Risoluzione più alta = controllo più preciso ma pacchetti più grandi |
| Framing | Come i pacchetti sono strutturati e identificati | Framing efficiente = minore overhead e migliori prestazioni |
Ho sperimentato ampiamente con diverse frequenze di pacchetti e ho scoperto che l'impostazione ottimale varia drasticamente in base allo stile di volo. Per le gare, preferisco 500Hz o più per una latenza minima, mentre per la crociera a lungo raggio, 50Hz o meno forniscono una portata migliore con una reattività ancora accettabile.
Link Budget
Il bilancio di potenza complessivo del collegamento radio:

Comprendere il budget del collegamento è stato fondamentale per le mie build a lungo raggio. Ho imparato che raddoppiare la potenza di trasmissione aggiunge molto meno raggio rispetto all'ottimizzazione delle antenne o al miglioramento della sensibilità del ricevitore.
Protocollo vs Sistema RF vs Connessione Fisica
È importante distinguere tra concetti correlati ma diversi:
| Concetto | Descrizione | Esempi |
|---|---|---|
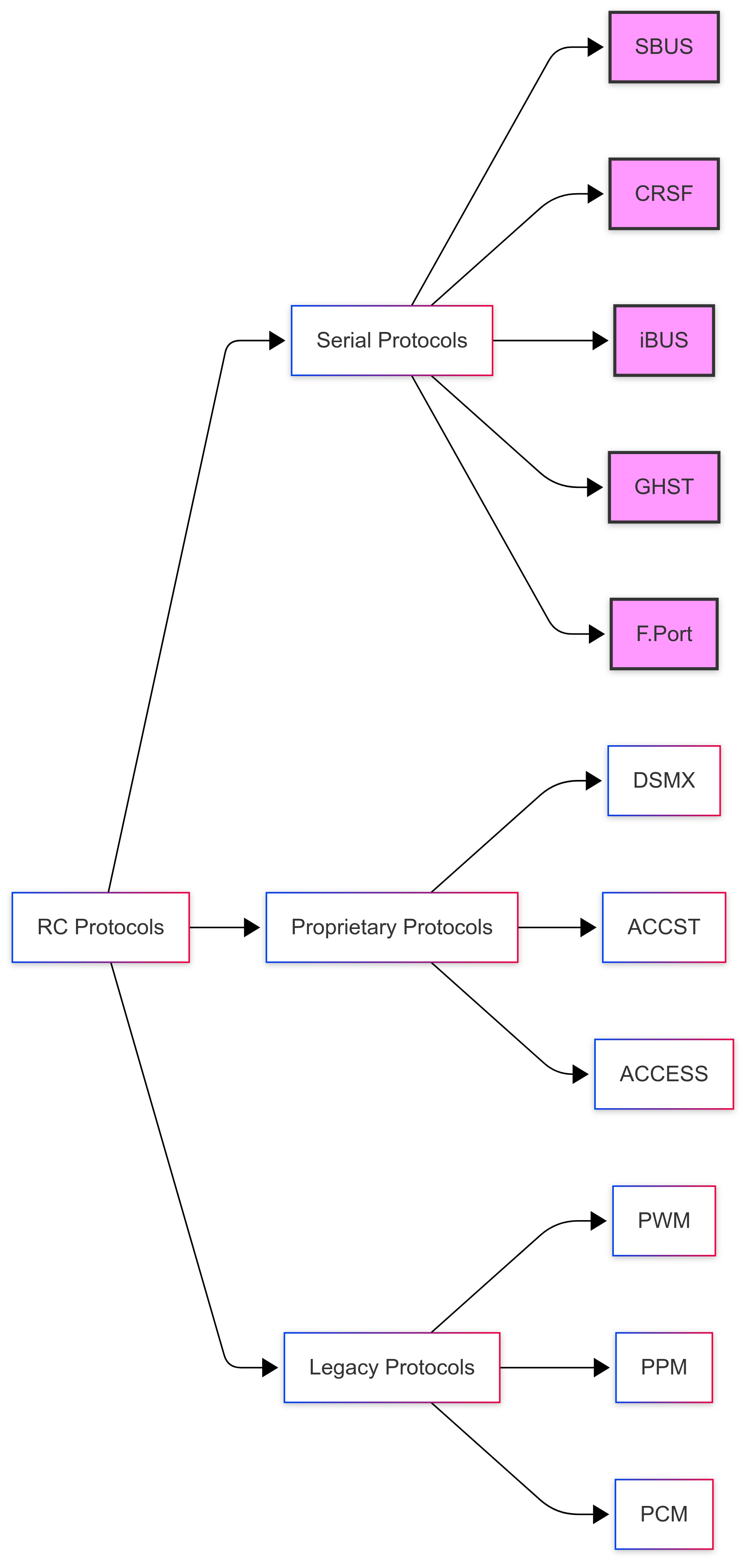
| Protocollo | Standard di comunicazione che definisce come sono strutturati i dati | CRSF, SBUS, iBUS, GHST |
| Sistema RF | Tecnologia di radiofrequenza utilizzata per trasmettere il segnale | ExpressLRS, Crossfire, ACCST, DSMX |
| Connessione Fisica | Come il ricevitore si collega al flight controller | UART, PWM, I2C, SPI |
Questa distinzione è importante perché lo stesso protocollo (ad es. CRSF) può essere utilizzato da diversi sistemi RF (ad es. TBS Crossfire ed ExpressLRS), e lo stesso sistema RF può a volte supportare più protocolli.
Principali Protocolli RC
Esaminiamo i protocolli più significativi nel mondo dei droni, sulla base dei miei ampi test ed esperienza sul campo.
Panoramica Comparativa dei Protocolli
SBUS (Serial Bus)
Sviluppato da Futaba e ampiamente adottato da FrSky e altri, SBUS è stato uno standard per molti anni.
Caratteristiche Tecniche
- Velocità Dati: 100.000 bps
- Frequenza di Aggiornamento: Tipicamente 9ms (111Hz)
- Canali: Fino a 16 proporzionali + 2 digitali
- Latenza: ~14ms end-to-end (tipico)
- Tipo di Segnale: Seriale UART invertito
- Telemetria: Non inclusa in SBUS stesso (richiede connessione separata)
Punti di Forza
- Compatibilità Diffusa: Supportato da praticamente tutti i flight controller
- Semplicità: Connessione a filo singolo al flight controller
- Affidabilità: Comprovata esperienza in innumerevoli build
Limitazioni
- Inversione del Segnale: Richiede un invertitore per flight controller F1/F3 (F4 e successivi hanno invertitori integrati)
- Latenza Moderata: Non così reattivo come i protocolli più recenti
- Nessuna Telemetria Integrata: Richiede una connessione separata per i dati di telemetria
Ho usato SBUS in dozzine di build nel corso degli anni e rimane una scelta solida e affidabile. Apprezzo particolarmente la sua compatibilità universale: non ho mai incontrato un flight controller che non potesse usare SBUS.
CRSF (Crossfire RF)
Sviluppato da Team BlackSheep per il loro sistema Crossfire e successivamente adottato da ExpressLRS, CRSF è diventato lo standard di riferimento per i collegamenti RC ad alte prestazioni.
Caratteristiche Tecniche
- Velocità Dati: 420.000 bps
- Frequenza di Aggiornamento: Variabile da 50Hz a 1000Hz (a seconda dell'implementazione)
- Canali: Fino a 12 canali
- Latenza: Fino a 2ms (a 1000Hz)
- Tipo di Segnale: Seriale UART non invertito
- Telemetria: Comunicazione bidirezionale integrata
Punti di Forza
- Bassa Latenza: Controllo estremamente reattivo
- Telemetria Integrata: Feedback completo dei dati nella stessa connessione
- Funzionalità Avanzate: Supporto per script LUA, aggiornamenti over-the-air, abbinamento modelli
- Implementazione Flessibile: Utilizzato da più sistemi RF con diverse caratteristiche
Limitazioni
- Complessità: Più opzioni di configurazione possono essere travolgenti per i principianti
- Requisiti Hardware: Richiede un flight controller con UART disponibile
- Variazioni di Implementazione: Diversi sistemi che utilizzano CRSF possono avere diverse capacità
CRSF è stato il mio protocollo di scelta per build serie dal 2018. La combinazione di bassa latenza, telemetria integrata e funzionalità avanzate lo rende difficile da battere. Il design del protocollo consente prestazioni eccellenti in un'ampia gamma di applicazioni.
iBUS
Sviluppato da FlySky, iBUS offre un protocollo seriale semplice con telemetria integrata.
Caratteristiche Tecniche
- Velocità Dati: 115.200 bps
- Frequenza di Aggiornamento: Tipicamente 8ms (125Hz)
- Canali: Fino a 14 canali
- Latenza: ~12ms end-to-end (tipico)
- Tipo di Segnale: Seriale UART non invertito
- Telemetria: Comunicazione bidirezionale integrata
Punti di Forza
- Nessuna Inversione del Segnale: Funziona direttamente con tutti i flight controller
- Telemetria Integrata: Soluzione a filo singolo per controllo e dati
- Semplicità: Configurazione semplice con configurazione minima
Limitazioni
- Ecosistema Limitato: Utilizzato principalmente con apparecchiature FlySky
- Meno Funzionalità Avanzate: Rispetto a CRSF o GHST
- Meno Comune: Meno supporto e sviluppo della comunità
Ho usato iBUS in diverse build economiche e si comporta ammirevole per il suo prezzo. Il segnale non invertito è particolarmente comodo quando si lavora con flight controller più vecchi, eliminando la necessità di invertitori di segnale che SBUS richiede.
GHST (Ghost)
Sviluppato da ImmersionRC per il loro sistema Ghost, GHST offre un eccellente equilibrio di caratteristiche prestazionali.
Caratteristiche tecniche
- Velocità di trasmissione dati: 420.000 bps
- Frequenza di aggiornamento: Variabile da 50Hz a 250Hz
- Canali: Fino a 12 canali
- Latenza: Fino a 5ms
- Tipo di segnale: Seriale UART non invertito
- Telemetria: Comunicazione bidirezionale integrata
Punti di forza
- Latenza molto bassa: Eccellente reattività
- Buona portata: Capacità di distanza superiori alla media
- Implementazione pulita: Protocollo ben progettato con un uso efficiente della larghezza di banda
- Documentazione aperta: Specifiche del protocollo trasparenti
Limitazioni
- Adozione limitata: Non così ampiamente utilizzato come CRSF o SBUS
- Meno opzioni hardware: Selezione limitata di apparecchiature compatibili
- Meno sviluppo della comunità: Ecosistema più piccolo di strumenti e risorse
Ho testato approfonditamente GHST e sono rimasto impressionato dalla sua implementazione tecnica. Il protocollo raggiunge un eccellente equilibrio tra latenza e portata, anche se non ha guadagnato la quota di mercato di alcuni concorrenti.
DSMX
Sviluppato da Spektrum, DSMX è ampiamente utilizzato negli Stati Uniti e nei modelli pronti al volo.
Caratteristiche tecniche
- Velocità di trasmissione dati: Proprietaria
- Frequenza di aggiornamento: 11ms (91Hz) o 22ms (45Hz)
- Canali: Fino a 12 canali
- Latenza: ~14ms (frequenza di frame di 11ms) o ~25ms (frequenza di frame di 22ms)
- Tipo di segnale: Seriale proprietario
- Telemetria: Limitata nella maggior parte delle implementazioni
Punti di forza
- Diffuso nei modelli RTF: Comune nei droni pronti al volo
- Forte presenza sul mercato statunitense: Ben supportato in Nord America
- Semplicità di binding: Facile processo di binding del ricevitore
Limitazioni
- Ecosistema chiuso: Protocollo proprietario con supporto limitato di terze parti
- Latenza più elevata: Non così reattivo come i protocolli più recenti
- Telemetria limitata: Di base rispetto a CRSF o GHST
Anche se non ho usato DSMX così estensivamente come altri protocolli, ho lavorato con diversi droni equipaggiati con Spektrum. Il protocollo è affidabile ma sembra datato rispetto alle alternative più recenti, in particolare in termini di latenza e set di funzionalità.
F.Port
Sviluppato da FrSky, F.Port combina il controllo SBUS e la telemetria SmartPort in un'unica connessione.
Caratteristiche tecniche
- Velocità di trasmissione dati: 115.200 bps
- Frequenza di aggiornamento: In genere 9ms (111Hz)
- Canali: Fino a 16 proporzionali + 2 digitali
- Latenza: ~14ms da end-to-end (tipico)
- Tipo di segnale: UART half-duplex
- Telemetria: Comunicazione bidirezionale integrata
Punti di forza
- Soluzione a singolo filo: Combina controllo e telemetria
- Compatibilità: Funziona con l'ecosistema FrSky esistente
- Efficienza delle risorse: Libera le porte UART sul flight controller
Limitazioni
- Specifico per FrSky: Limitato all'equipaggiamento FrSky
- Complessità di configurazione: Può essere difficile da configurare correttamente
- Popolarità in calo: Viene sostituito da protocolli più recenti
Ho convertito diversi dei miei setup FrSky da SBUS/SmartPort separati a F.Port. La soluzione a singolo filo è elegante, anche se ho trovato la configurazione più complicata del previsto, spesso richiedendo aggiornamenti del firmware sia al ricevitore che al trasmettitore.
Protocolli FrSky
FrSky ha sviluppato diversi protocolli che meritano una menzione specifica a causa del loro ampio utilizzo nella comunità dei droni.
ACCST (Advanced Continuous Channel Shifting Technology)
Il protocollo digitale originale di FrSky che ha guadagnato un'ampia adozione:
- Velocità di trasmissione dati: Variabile
- Frequenza di aggiornamento: In genere 9ms (111Hz)
- Canali: Fino a 16 canali (modalità D16)
- Latenza: ~14ms da end-to-end (tipico)
- Tipo di segnale: 2.4GHz FHSS
- Telemetria: Disponibile tramite connessione SmartPort separata
Varianti:
- D8: Modalità a 8 canali compatibile con i ricevitori più vecchi
- D16: Modalità a 16 canali con funzionalità avanzate
- LR12: Variante a lungo raggio con canali ridotti
Ho usato ACCST D16 per anni e l'ho trovato un protocollo affidabile per il volo quotidiano. Anche se non è avanzato come le opzioni più recenti, ha fornito prestazioni costanti e una buona compatibilità con un'ampia gamma di flight controller.
ACCESS (Advanced Communication Control, Elevated Spread Spectrum)
Il nuovo protocollo di FrSky introdotto nel 2019 come sostituto di ACCST:
- Velocità di trasmissione dati: Superiore ad ACCST
- Frequenza di aggiornamento: In genere 9ms (111Hz)
- Canali: Fino a 24 canali
- Latenza: ~12-14ms da end-to-end (tipico)
- Tipo di segnale: 2.4GHz FHSS con sicurezza avanzata
- Telemetria: Integrata con larghezza di banda maggiore
Caratteristiche principali:
- Sicurezza avanzata: Utilizza il binding con ID univoco per prevenire connessioni non autorizzate
- Aggiornamenti over-the-air: Possibilità di aggiornare il firmware del ricevitore dal trasmettitore
- Analisi dello spettro: Scansione delle frequenze integrata per evitare interferenze
- Smart Match: Processo di binding semplificato con registrazione del ricevitore
La mia esperienza con ACCESS è stata altalenante. Mentre le funzionalità di sicurezza avanzate e gli aggiornamenti OTA sono preziosi, la transizione da ACCST è stata confusa a causa di problemi di compatibilità. Quando configurato correttamente, ACCESS offre prestazioni leggermente migliori rispetto ad ACCST in termini di portata e affidabilità, ma le differenze non sono drammatiche per gli scenari di volo tipici.
Protocolli legacy
Anche se meno comuni nei droni moderni, questi protocolli meritano di essere compresi per il contesto storico:
PWM (Pulse Width Modulation)
- Caratteristiche: Un filo per canale, controllo diretto dei servi
- Limitazioni: Cablaggio ingombrante, canali limitati, suscettibile alle interferenze
- Uso attuale: Raramente utilizzato nei droni moderni, tranne per le connessioni dirette ai servi
PPM (Pulse Position Modulation)
- Caratteristiche: Più canali su un singolo filo, segnale analogico
- Limitazioni: Canali limitati (tipicamente 8), latenza moderata
- Uso attuale: Occasionalmente presente in apparecchiature base o più vecchie
PCM (Pulse Code Modulation)
- Caratteristiche: Codifica digitale dei segnali di controllo
- Vantaggi: Migliore rilevamento degli errori rispetto a PPM
- Uso attuale: In gran parte sostituito da protocolli digitali più recenti
Confronto delle prestazioni dei protocolli
Dopo approfonditi test in varie condizioni, ecco come i principali protocolli si confrontano nelle metriche di prestazione chiave.
Confronto della latenza
Misurata dal movimento dello stick alla risposta del flight controller:
| Protocollo | Latenza minima | Latenza tipica | Note |
|---|---|---|---|
| ExpressLRS | 2ms | 4-10ms | Varia con il packet rate (1000Hz-50Hz) |
| GHST | 5ms | 7-12ms | Varia con il packet rate (250Hz-50Hz) |
| CRSF (Crossfire) | 6ms | 10-15ms | Varia con il packet rate (150Hz-50Hz) |
| iBUS | 10ms | 12-15ms | Relativamente costante |
| F.Port | 12ms | 14-16ms | Simile a SBUS |
| SBUS | 12ms | 14-16ms | Relativamente costante |
| DSMX | 14ms | 14-25ms | Dipende dall'impostazione del frame rate |
Nella mia esperienza, le differenze di latenza diventano percettibili intorno ai 5ms. Volare con ExpressLRS a 500Hz è notevolmente più reattivo di SBUS, in particolare durante manovre e correzioni rapide.
Confronto della portata
Basato sui miei test con potenza di uscita paragonabile (100mW) e antenne standard:
| Protocollo | Portata tipica | Portata massima | Note |
|---|---|---|---|
| ExpressLRS 2.4GHz (50Hz) | 5-10km | 30km+ | Eccezionale rapporto portata-latenza |
| TBS Crossfire 900MHz | 5-10km | 40km+ | Standard del settore per il lungo raggio |
| ExpressLRS 900MHz (25Hz) | 10-20km | 50km+ | Attuale campione di portata |
| GHST 2.4GHz | 3-5km | 10km+ | Buon equilibrio tra portata e latenza |
| FrSky R9 900MHz | 3-5km | 15km+ | Buona portata ma meno affidabile dei sistemi più recenti |
| FrSky ACCST 2.4GHz | 1-2km | 5km | Adeguato per la maggior parte dei voli |
| FlySky AFHDS 2A | 0.5-1.5km | 3km | Limitato ma sufficiente per il volo a vista |
| DSMX | 1-2km | 3km | Adeguato per la maggior parte dei voli |
Queste portate presuppongono condizioni ottimali con linea di vista libera. La portata nel mondo reale è influenzata da ostacoli, interferenze, posizionamento dell'antenna e altri fattori.
Confronto dell'affidabilità
Basato sulla mia esperienza di volo in vari ambienti:
| Protocollo | Resistenza alle interferenze | Affidabilità del failsafe | Robustezza complessiva |
|---|---|---|---|
| ExpressLRS | Eccellente | Eccellente | Eccellente |
| TBS Crossfire | Eccellente | Eccellente | Eccellente |
| GHST | Molto buona | Molto buona | Molto buona |
| FrSky R9 | Buona | Buona | Buona |
| F.Port | Buona | Buona | Buona |
| SBUS | Buona | Buona | Buona |
| iBUS | Buona | Buona | Buona |
| DSMX | Buona | Buona | Buona |
| FrSky ACCST | Discreta | Buona | Discreta |
| FlySky AFHDS 2A | Discreta | Discreta | Discreta |
Ho trovato ExpressLRS e Crossfire eccezionalmente affidabili anche in ambienti RF impegnativi. Durante un memorabile volo vicino a una torre radio, il mio collegamento ExpressLRS ha mantenuto una connessione solida mentre il sistema ACCST di un amico ha subito più failsafe.
Confronto delle funzionalità
| Protocollo | Telemetria | Aggiornamenti OTA | Metodo di binding | Funzionalità avanzate |
|---|---|---|---|---|
| CRSF | Completa | Sì | Variabile | Estese (script LUA, model match, potenza dinamica) |
| ExpressLRS | Configurabile | Sì | Frase di binding | Estese (potenza dinamica, aggiornamenti WiFi) |
| GHST | Completa | Sì | Pressione pulsante | Buone (model match, potenza dinamica) |
| F.Port | Completa | Limitati | Pressione pulsante | Limitate all'ecosistema FrSky |
| FrSky (SmartPort) | Completa | Limitati | Pressione pulsante | Limitate all'ecosistema FrSky |
| iBUS | Base | No | Pressione pulsante | Limitate |
| SBUS | Nessuna (separata) | No | Pressione pulsante | Limitate |
| DSMX | Base | No | Pressione pulsante | Limitate (model match) |
Il divario di funzionalità tra i protocolli più recenti come CRSF/ExpressLRS e gli standard più vecchi è sostanziale. La possibilità di aggiornare il firmware over-the-air e accedere a una telemetria completa ha trasformato il modo in cui interagisco con i miei droni.
Scegliere il protocollo giusto
Con così tante opzioni, selezionare il protocollo giusto può essere travolgente. Ecco i miei consigli pratici basati su diversi scenari di volo.
Per le gare
Priorità: Latenza minima e prestazioni affidabili in ambienti RF affollati
- Scelta migliore: ExpressLRS a 500Hz o superiore
- Alternativa: GHST a 250Hz
- Opzione economica: iBUS (se si utilizza attrezzatura FlySky)
Per le gare, uso esclusivamente ExpressLRS a 500Hz. La combinazione di latenza ultra-bassa ed eccellente resistenza alle interferenze è imbattibile, in particolare in ambienti di gara affollati dove decine di trasmettitori video e collegamenti di controllo operano simultaneamente.
Per il freestyle
Priorità: Buon equilibrio tra reattività e portata
- Scelta migliore: ExpressLRS a 250Hz
- Alternativa: CRSF (Crossfire) a 150Hz
- Opzione economica: F.Port o SBUS con attrezzatura FrSky
Il volo freestyle beneficia di controlli reattivi ma non richiede la latenza minima assoluta delle gare. Ho trovato che ExpressLRS a 250Hz sia il punto ideale, offrendo un'eccellente sensazione dello stick mentre mantiene una portata più che sufficiente per le tipiche sessioni di freestyle.
Per lunghe distanze
Priorità: Massima portata affidabile con latenza accettabile
- Scelta migliore: ExpressLRS 900MHz a 25-50Hz
- Alternativa: TBS Crossfire 900MHz
- Opzione economica: FrSky R9 (con limitazioni)
Per i miei setup dedicati al lungo raggio, ExpressLRS 900MHz a 25Hz si è dimostrato imbattibile. La combinazione di un protocollo efficiente, la modulazione LoRa e un basso packet rate consente una portata straordinaria mantenendo una reattività di controllo utilizzabile.
Per principianti
Priorità: Semplicità, affidabilità e prestazioni adeguate
- Scelta migliore: ExpressLRS a 100Hz (con adeguata guida)
- Alternativa: SBUS o F.Port con apparecchiature FrSky
- Opzione economica: iBUS con apparecchiature FlySky
Sebbene ExpressLRS offra le migliori prestazioni, le sue opzioni di configurazione possono travolgere i principianti. Se stai aiutando un nuovo pilota, fornisci assistenza per la configurazione di ExpressLRS o consiglia un sistema più semplice come FrSky con SBUS, che offre buone prestazioni con meno complessità.
Per volo cinematico
Priorità: Controllo fluido e collegamento affidabile
- Scelta migliore: ExpressLRS a 100Hz o 50Hz
- Alternativa: CRSF (Crossfire) a 50Hz
- Opzione economica: SBUS o F.Port
Il volo cinematico trae vantaggio da input di controllo fluidi piuttosto che da una risposta rapida. Packet rate più bassi (50-100Hz) forniscono una reattività più che sufficiente massimizzando portata e affidabilità. Uso spesso ExpressLRS a 50Hz per i miei setup cinematici, poiché offre un'eccellente portata con un controllo ancora fluido.
Risoluzione dei problemi di protocollo
Anche con una corretta implementazione, possono sorgere problemi di protocollo RC. Ecco come diagnostico e risolvo i problemi comuni.
Problemi comuni e soluzioni
Connessione intermittente
Sintomi: Failsafe casuali, glitch di controllo o interruzioni della telemetria
Possibili cause e soluzioni:
- Interferenze:
- Allontanare l'antenna del trasmettitore video dall'antenna del ricevitore
- Schermare la scheda di distribuzione dell'alimentazione
- Utilizzare nuclei in ferrite sui cavi di alimentazione
- Problemi di antenna:
- Verificare la presenza di antenne danneggiate
- Assicurarsi che l'orientamento dell'antenna sia corretto
- Verificare che le connessioni dell'antenna siano sicure
- Problemi di alimentazione:
- Verificare che il ricevitore riceva 5V puliti
- Aggiungere un condensatore all'ingresso di alimentazione
- Verificare la presenza di cali di tensione sotto carico
Una volta ho inseguito un problema di connessione intermittente per settimane prima di scoprire che la mia antenna VTX era posizionata troppo vicino alla mia antenna del ricevitore. Spostandole di soli 3 cm più lontane ha completamente risolto il problema.
Nessuna risposta di controllo
Sintomi: Trasmettitore connesso ma nessuna risposta dal drone
Possibili cause e soluzioni:
- Mancata corrispondenza del protocollo:
- Verificare che sia selezionato il protocollo corretto nel flight controller
- Controllare le impostazioni del modulo trasmettitore
- Configurazione UART:
- Confermare che l'UART sia assegnato correttamente a Serial RX
- Verificare che le connessioni TX/RX siano corrette
- Inversione del segnale:
- Verificare se l'impostazione di inversione corrisponde ai requisiti del protocollo
- Verificare l'invertitore hardware se utilizzato
- Mappatura dei canali:
- Assicurarsi che i canali siano mappati correttamente
- Verificare la presenza di problemi di ordine AETR vs TAER
Il problema di "nessuna risposta" più comune che incontro è l'assegnazione errata dell'UART. Controllare sempre due volte che l'UART a cui ti sei connesso sia configurato correttamente per Serial RX nella scheda delle porte.
Problemi di telemetria
Sintomi: Nessun dato di telemetria o telemetria intermittente
Possibili cause e soluzioni:
- Connessione mancante:
- Verificare la connessione bidirezionale per i protocolli che la richiedono
- Verificare che il pad TX sia collegato per i protocolli di telemetria
- Problemi di configurazione:
- Abilitare la telemetria nel trasmettitore
- Verificare le impostazioni del rapporto di telemetria (per ExpressLRS)
- Mancata corrispondenza del software:
- Aggiornare il firmware su trasmettitore e ricevitore
- Assicurarsi che le versioni siano compatibili
Per ExpressLRS, ho scoperto che il rapporto di telemetria è cruciale per dati affidabili. Per i voli a lungo raggio, uso un rapporto conservativo di 1:128 per dare priorità alla stabilità del collegamento di controllo rispetto alla frequenza di telemetria.
Difficoltà di binding
Sintomi: Impossibile associare il ricevitore al trasmettitore
Possibili cause e soluzioni:
- Problemi specifici del protocollo:
- ExpressLRS: Verificare che le frasi di binding e le versioni del firmware corrispondano
- Crossfire: Utilizzare lo script LUA per il binding
- FrSky: Verificare la compatibilità della versione EU/FCC
- Problemi hardware:
- Assicurarsi che il ricevitore sia alimentato correttamente durante il binding
- Provare il pulsante di bind fisico se disponibile
- Problemi di distanza:
- Tenere il trasmettitore e il ricevitore vicini durante il binding
- Rimuovere potenziali fonti di interferenza
I problemi di binding sono spesso specifici del protocollo. Con ExpressLRS, la maggior parte dei problemi di binding che ho riscontrato riguardano versioni del firmware o frasi di binding non corrispondenti. Verificare sempre che queste corrispondano esattamente tra trasmettitore e ricevitore.
Strumenti e tecniche di diagnostica
Indicatori di qualità del segnale del ricevitore
La maggior parte dei protocolli moderni fornisce metriche di qualità del segnale:
- RSSI (Received Signal Strength Indicator):
- Misura la forza complessiva del segnale
- Tipicamente visualizzato come percentuale
- Valori inferiori al 50% indicano potenziali problemi
- LQ (Link Quality):
- Misura il tasso di successo dei pacchetti
- Più utile di RSSI per i sistemi digitali
- Valori inferiori al 70% richiedono un'indagine
- Modalità RF:
- Indica la modalità operativa corrente (ad es. ExpressLRS passa tra 250Hz/50Hz in base al segnale)
- Aiuta a verificare che i sistemi dinamici funzionino correttamente
Mi affido molto a LQ per i sistemi ExpressLRS e Crossfire, poiché fornisce un'indicazione più significativa della salute del collegamento rispetto a RSSI. Monitorare le tendenze LQ durante il volo può fornire un avviso precoce di potenziali problemi.
Diagnostica del flight controller
Il flight controller può fornire preziose informazioni diagnostiche:
- Scheda Ricevitore:
- Verificare che i movimenti dei canali corrispondano agli input dello stick
- Verificare la presenza di clipping del segnale o valori anomali
- Confermare che la mappatura dei canali sia corretta
- Comandi CLI:
status- Mostra il provider serial RX attivorxrange- Visualizza gli intervalli dei canaliset serialrx_- Elenca le impostazioni serial RX correnti
- Registrazione Blackbox:
- Analizzare i dati dei comandi RC per glitch o incongruenze
- Confrontare i dati RC con la risposta del giroscopio per la valutazione della latenza
Quando risolvo problemi di controllo sottili, spesso uso i log Blackbox per analizzare i dati dei comandi RC. Questo mi ha aiutato a identificare e risolvere problemi come la configurazione errata dello smoothing RC che non erano immediatamente evidenti durante il volo.
Futuro dei protocolli RC
Il panorama dei protocolli RC continua ad evolversi rapidamente. Ecco le tendenze e gli sviluppi che sto osservando attentamente.
Tendenze attuali
- Aumento delle frequenze di aggiornamento: La spinta per una latenza più bassa continua, con 1000Hz ora disponibili e potenzialmente frequenze più elevate in futuro.
- Sviluppo open source: Progetti guidati dalla comunità come ExpressLRS stanno innovando più velocemente dei sistemi proprietari.
- Agilità di frequenza: I sistemi che possono operare su più bande (2.4GHz, 900MHz, 868MHz) forniscono flessibilità per diverse regioni e applicazioni.
- Integrazione con FPV digitale: Integrazione più stretta tra i sistemi di controllo e video, potenzialmente condividendo antenne o bande di frequenza.
- Espansione della telemetria: Dati di telemetria più completi, incluse statistiche sul collegamento video e parametri di volo avanzati.
Tecnologie emergenti
Diverse tecnologie promettenti sono all'orizzonte che potrebbero trasformare ulteriormente i protocolli RC:
- Elaborazione del segnale migliorata dall'IA: Algoritmi di apprendimento automatico che si adattano agli ambienti RF in tempo reale.
- Reti mesh: Reti distribuite in cui più droni possono ritrasmettere i segnali, estendendo l'intervallo effettivo.
- Radio cognitiva: Sistemi che rilevano automaticamente i canali disponibili e modificano di conseguenza i parametri di trasmissione.
- Crittografia resistente ai quanti: Con l'avanzare del quantum computing, saranno necessarie nuove misure di sicurezza per le applicazioni critiche.
- Software-Defined Radio (SDR): Sistemi radio più flessibili che possono essere riconfigurati tramite aggiornamenti software.
FAQ: Domande comuni sui protocolli RC
Domande generali sul protocollo
I diversi protocolli influiscono sulla durata della batteria?
Sì, ma in modo minimo sul lato del drone. Frequenze di pacchetto più elevate consumano leggermente più energia nel ricevitore, ma la differenza è trascurabile rispetto al consumo di energia del motore. Sul lato del trasmettitore, l'effetto può essere più evidente, con sistemi ad alta potenza e ad alto tasso di pacchetti che scaricano le batterie più velocemente.
Posso usare più protocolli sullo stesso drone?
Anche se tecnicamente possibile (ad esempio, controllo tramite un protocollo e telemetria tramite un altro), in genere non è consigliato a causa della maggiore complessità e delle potenziali interferenze. I moderni protocolli integrati eliminano la necessità di questo approccio.
In che modo i protocolli influenzano la trasmissione video?
Sono sistemi separati, ma possono influenzarsi a vicenda attraverso le interferenze. Alcuni sistemi avanzati come DJI O3 e Walksnail stanno iniziando a integrare il controllo e la trasmissione video per una migliore coordinazione e una riduzione delle interferenze.
Ci sono restrizioni legali sui protocolli RC?
Sì, l'uso delle frequenze e la potenza di uscita sono regolamentati in modo diverso nei vari paesi. Controllare sempre le normative locali, in particolare per i sistemi a 900MHz che hanno diverse allocazioni di frequenza in tutto il mondo (868MHz in UE, 915MHz negli Stati Uniti).
Domande tecniche sul protocollo
Qual è la differenza tra RSSI e LQ?
RSSI (Received Signal Strength Indicator) misura la potenza del segnale grezzo, mentre LQ (Link Quality) misura la percentuale di pacchetti ricevuti con successo. LQ è generalmente più utile per i sistemi digitali in quanto indica direttamente l'affidabilità della comunicazione.
In che modo la frequenza dei pacchetti influisce sulla latenza e sulla portata?
Frequenze di pacchetto più elevate riducono la latenza ma in genere diminuiscono la portata a causa del minor tempo per la correzione degli errori e della minore energia per pacchetto. Ecco perché il volo a lungo raggio utilizza frequenze di pacchetto più basse (25-50Hz) mentre le gare utilizzano frequenze più alte (500Hz+).
Cosa causa i failsafe anche con un buon RSSI/LQ?
Diversi fattori possono causare questo: interferenze su frequenze specifiche, blocco momentaneo del segnale, problemi hardware del ricevitore o problemi di alimentazione. Un buon RSSI non garantisce che tutti i pacchetti vengano ricevuti correttamente.
Posso migliorare le prestazioni del protocollo con antenne migliori?
Assolutamente sì. La qualità, il tipo e il posizionamento dell'antenna possono influenzare notevolmente la portata e l'affidabilità. Per applicazioni critiche, l'uso di sistemi di diversità con più antenne in orientamenti diversi offre le migliori prestazioni.
Domande sulla selezione del protocollo
ExpressLRS è davvero molto meglio di altri protocolli?
Per la maggior parte delle metriche (latenza, portata, flessibilità), sì. La natura open source ha permesso uno sviluppo e un'ottimizzazione rapidi. Tuttavia, altri protocolli possono offrire vantaggi in aree specifiche come l'integrazione dell'ecosistema o la semplicità.
Dovrei scegliere 2.4GHz o 900MHz per il lungo raggio?
I 900MHz in genere forniscono una migliore penetrazione e portata grazie alla frequenza più bassa, ma i sistemi a 2.4GHz possono comunque raggiungere una portata impressionante con impostazioni ottimizzate. Se la massima portata è la priorità e i 900MHz sono legali nella tua regione, di solito è la scelta migliore.
Quale protocollo ha la migliore resistenza alle interferenze?
ExpressLRS e TBS Crossfire eccellono qui, con sofisticati salti di frequenza e correzione degli errori. ExpressLRS a frequenze di pacchetto più elevate (250Hz+) è particolarmente buono in ambienti RF affollati come gli eventi di gara.
Vale la pena passare da SBUS a un protocollo più recente?
Per la maggior parte dei piloti, sì. I miglioramenti nella latenza, nell'integrazione della telemetria e nell'affidabilità sono evidenti. I maggiori guadagni si ottengono quando si aggiornano sia il sistema RF (ad es. a ExpressLRS) che il protocollo tra ricevitore e flight controller (ad es. a CRSF).
Conclusione
I protocolli RC si sono evoluti drasticamente dai semplici sistemi analogici del passato ai sofisticati sistemi di comunicazione digitale di oggi. Comprendere questi protocolli è fondamentale per ottimizzare le prestazioni e l'affidabilità del tuo drone.
L'attuale panorama è dominato da protocolli seriali come SBUS per i sistemi tradizionali, CRSF per applicazioni ad alte prestazioni e protocolli specializzati come GHST e iBUS per ecosistemi specifici. Nel frattempo, i sistemi RF che implementano questi protocolli continuano a progredire, con ExpressLRS che stabilisce nuovi standard di prestazioni e valore.
Quando si seleziona un protocollo, considera le tue esigenze specifiche:
- Per le gare, dai la priorità alla latenza minima con ExpressLRS a frequenze di pacchetto elevate
- Per il freestyle, bilancia reattività e portata con frequenze di pacchetto moderate
- Per il lungo raggio, concentrati sull'affidabilità e la penetrazione con i sistemi a 900MHz
- Per i principianti, scegli sistemi con una buona documentazione e supporto della comunità
Ricorda che una corretta implementazione è altrettanto importante della selezione del protocollo. Il posizionamento dell'antenna, le impostazioni di configurazione e la manutenzione regolare svolgono tutti un ruolo cruciale nel raggiungimento delle prestazioni ottimali.
Con il progredire della tecnologia, possiamo aspettarci capacità ancora più impressionanti dai futuri protocolli RC. La tendenza verso lo sviluppo open source, frequenze di aggiornamento più elevate e una maggiore integrazione con altri sistemi promette un futuro entusiasmante per i sistemi di controllo dei droni.


