Aperçu des protocoles RC pour drones

Voici le contenu traduit en français avec la structure HTML et les liens préservés :
Les protocoles de radiocommande sont les langages numériques qui permettent à votre émetteur de communiquer avec votre drone. Après des années de tests de divers systèmes RC dans différentes conditions de vol, j'ai appris que la compréhension de ces protocoles est cruciale pour optimiser les performances et la fiabilité. Ce guide complet explore les principaux protocoles RC disponibles aujourd'hui et leurs caractéristiques techniques, en se concentrant spécifiquement sur les normes de communication plutôt que sur les écosystèmes matériels qui les mettent en œuvre.
Introduction aux protocoles RC
Lorsque nous parlons de systèmes de radiocommande pour drones, nous nous concentrons souvent sur les émetteurs et récepteurs physiques. Cependant, c'est le protocole sous-jacent - la norme de communication qui définit comment les données sont empaquetées, transmises et interprétées - qui détermine réellement les performances. Considérez les protocoles comme des langages différents : bien que tous permettent la communication, certains sont plus efficaces, précis ou robustes que d'autres dans des situations spécifiques.
Je me souviens encore de mes débuts de vol avec des récepteurs PWM de base, où chaque canal nécessitait un fil séparé et où les interférences de signal étaient une préoccupation constante. L'évolution vers les protocoles numériques modernes a transformé la fiabilité et les capacités des systèmes RC, permettant des fonctionnalités autrefois inimaginables.
L'évolution des protocoles RC
La communication RC a considérablement évolué au fil des décennies :
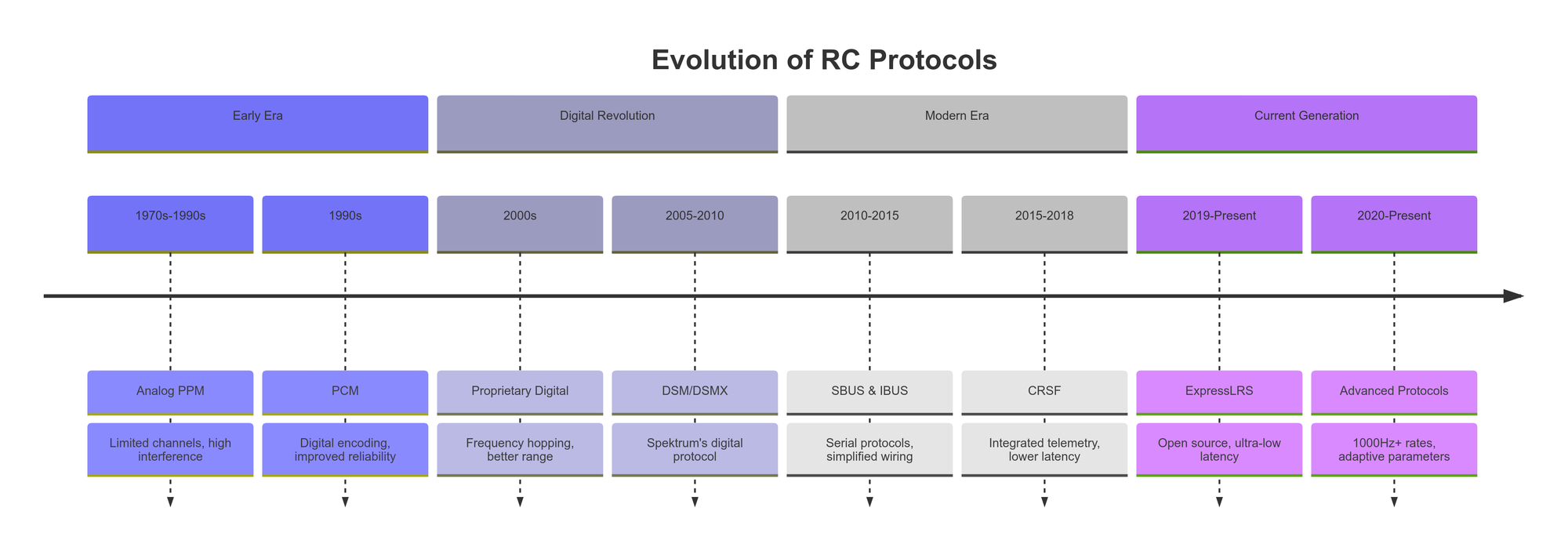
- Débuts (années 1970-1990) : PPM analogique simple (Pulse Position Modulation) avec des canaux limités et une sensibilité aux interférences.
- Révolution numérique (années 2000) : Introduction de la PCM (Pulse Code Modulation) et des premiers protocoles numériques propriétaires avec une fiabilité et des fonctionnalités améliorées. Ce fut un changement de paradigme - soudainement, les défaillances en vol sont devenues beaucoup moins fréquentes.
- Ère moderne (années 2010) : Développement de protocoles série sophistiqués comme SBUS, CRSF et iBUS, offrant de multiples canaux, la télémétrie et des fonctionnalités avancées.
- Génération actuelle (années 2020) : Des protocoles avancés repoussant les limites des performances avec des taux de rafraîchissement et une portée sans précédent. Les améliorations techniques de la conception des protocoles ont permis des performances qui n'étaient pas possibles avec l'équipement grand public il y a seulement quelques années.
Pourquoi les protocoles sont importants
Le protocole que vous choisissez affecte plusieurs aspects critiques de votre expérience de vol :
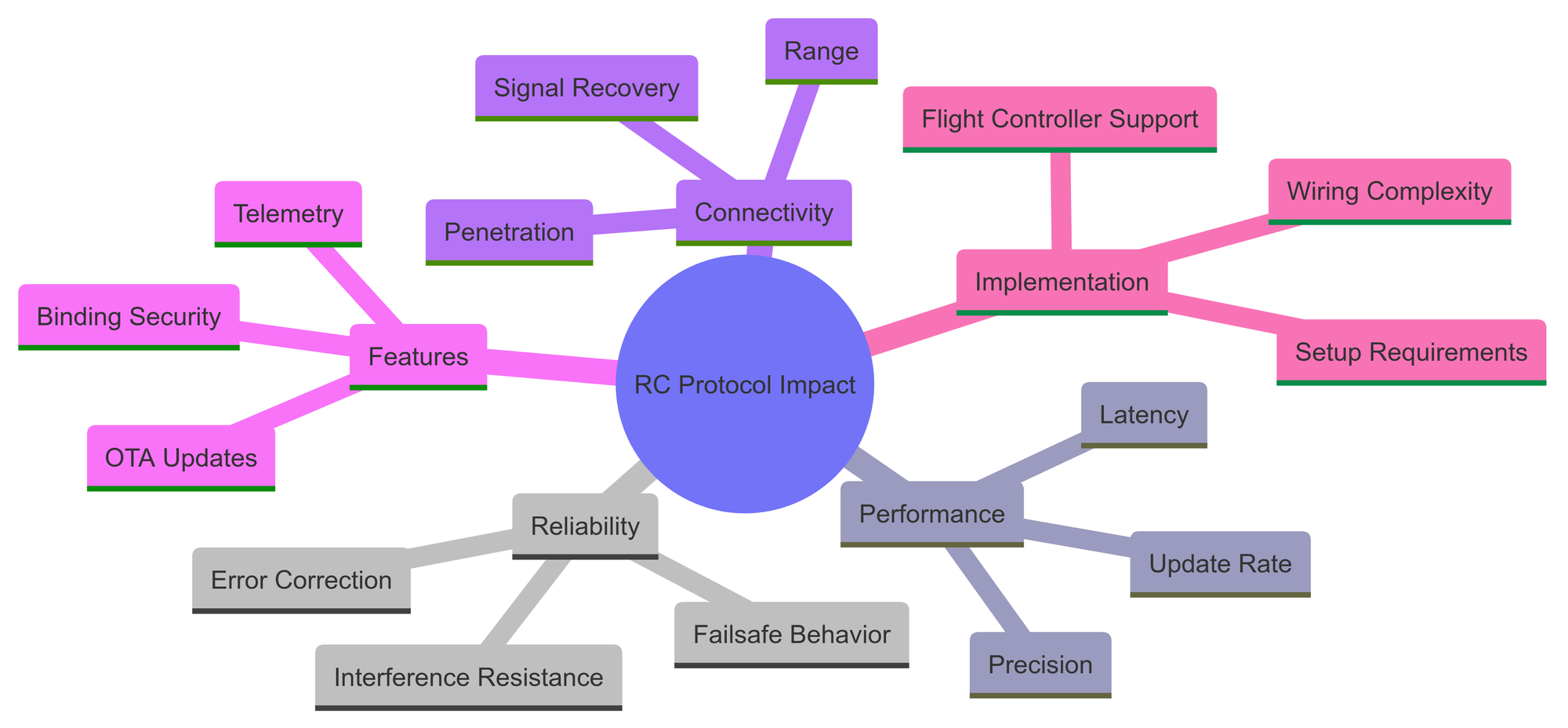
- Latence : La rapidité avec laquelle les mouvements de vos sticks se traduisent en réponse du drone
- Portée : La distance à laquelle vous pouvez voler tout en maintenant un contrôle fiable
- Fiabilité : La résistance de la liaison aux interférences et aux pertes de signal
- Fonctionnalités : Les capacités supplémentaires disponibles (télémétrie, mises à jour over-the-air, etc.)
- Exigences matérielles : L'équipement nécessaire pour utiliser le protocole
J'ai expérimenté de première main comment le changement de protocole peut transformer les performances d'un drone. Le bon protocole peut faire la différence entre un drone qui semble lent et peu réactif et un drone qui semble être une extension de vos pensées.
Comprendre les fondamentaux des protocoles
Avant de plonger dans des protocoles spécifiques, il est important de comprendre les concepts techniques qui les différencient.
Concepts techniques clés
Modulation du signal
Comment l'information est encodée sur l'onde porteuse :

- Frequency Hopping Spread Spectrum (FHSS) : Change rapidement de fréquence selon un schéma prédéterminé, améliorant la résistance aux interférences. La plupart des protocoles modernes utilisent une forme de FHSS.
- Direct Sequence Spread Spectrum (DSSS) : Étale le signal sur une large bande passante, le rendant résistant aux interférences à bande étroite. Moins courant dans les applications de drones.
- Adaptive Frequency Agility : Systèmes avancés qui détectent et évitent activement les interférences en modifiant les schémas de fréquence. J'ai trouvé ces systèmes particulièrement utiles lors de vols en milieu urbain avec un bruit RF imprévisible.
Débits de données et structure des paquets
Comment l'information est empaquetée et transmise :
| Concept | Description | Impact sur les performances |
|---|---|---|
| Taux de paquets | Nombre de paquets de données envoyés par seconde (Hz) | Taux plus élevés = latence plus faible mais portée réduite |
| Taille des paquets | Quantité d'informations dans chaque transmission | Paquets plus grands = plus de données mais temps de transmission plus long |
| Correction d'erreurs | Méthodes pour détecter et récupérer des erreurs | Correction plus robuste = meilleure fiabilité mais latence accrue |
| Résolution des canaux | Précision des valeurs de contrôle (bits) | Résolution plus élevée = contrôle plus précis mais paquets plus grands |
| Encadrement | Comment les paquets sont structurés et identifiés | Encadrement efficace = surcharge plus faible et meilleures performances |
J'ai beaucoup expérimenté avec différents taux de paquets et j'ai constaté que le réglage optimal varie considérablement en fonction du style de vol. Pour la course, je préfère 500 Hz ou plus pour une latence minimale, tandis que pour les vols longue distance, 50 Hz ou moins offrent une meilleure portée avec une réactivité encore acceptable.
Budget de liaison
L'équilibre de puissance global de la liaison radio :

Comprendre le budget de liaison a été crucial pour mes constructions longue portée. J'ai appris que doubler la puissance d'émission ajoute beaucoup moins de portée que l'optimisation des antennes ou l'amélioration de la sensibilité du récepteur.
Protocole vs Système RF vs Connexion physique
Il est important de distinguer des concepts liés mais différents :
| Concept | Description | Exemples |
|---|---|---|
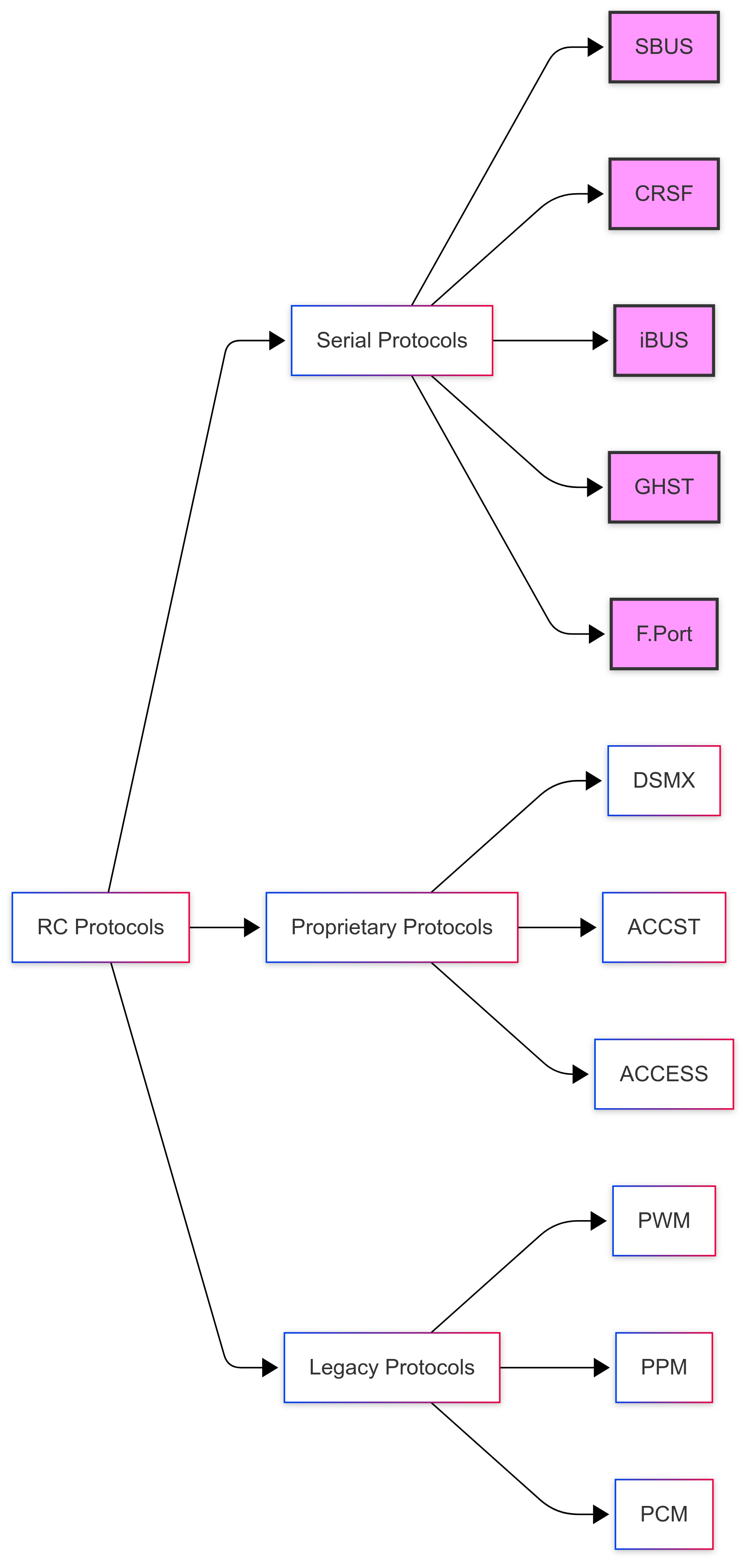
| Protocole | Norme de communication définissant la structure des données | CRSF, SBUS, iBUS, GHST |
| Système RF | Technologie de radiofréquence utilisée pour transmettre le signal | ExpressLRS, Crossfire, ACCST, DSMX |
| Connexion physique | Comment le récepteur se connecte au contrôleur de vol | UART, PWM, I2C, SPI |
Cette distinction est importante car le même protocole (par ex. CRSF) peut être utilisé par différents systèmes RF (par ex. TBS Crossfire et ExpressLRS), et le même système RF peut parfois prendre en charge plusieurs protocoles.
Principaux protocoles RC
Examinons les protocoles les plus importants dans le monde des drones, sur la base de mes nombreux tests et de mon expérience réelle.
Aperçu comparatif des protocoles
SBUS (Serial Bus)
Développé par Futaba et largement adopté par FrSky et d'autres, SBUS est un standard depuis de nombreuses années.
Caractéristiques techniques
- Débit de données : 100 000 bps
- Taux de rafraîchissement : Généralement 9ms (111Hz)
- Canaux : Jusqu'à 16 proportionnels + 2 numériques
- Latence : ~14ms de bout en bout (typique)
- Type de signal : Série UART inversé
- Télémétrie : Non incluse dans SBUS lui-même (nécessite une connexion séparée)
Forces
- Compatibilité généralisée : Pris en charge par pratiquement tous les contrôleurs de vol
- Simplicité : Connexion à un seul fil au contrôleur de vol
- Fiabilité : Bilan éprouvé dans d'innombrables constructions
Limites
- Inversion de signal : Nécessite un inverseur pour les contrôleurs de vol F1/F3 (F4 et plus récents ont des inverseurs intégrés)
- Latence modérée : Pas aussi réactif que les protocoles plus récents
- Pas de télémétrie intégrée : Nécessite une connexion séparée pour les données de télémétrie
J'ai utilisé SBUS dans des dizaines de constructions au fil des ans, et il reste un choix solide et fiable. J'apprécie particulièrement sa compatibilité universelle - je n'ai jamais rencontré de contrôleur de vol qui ne pouvait pas utiliser SBUS.
CRSF (Crossfire RF)
Développé par Team BlackSheep pour leur système Crossfire et plus tard adopté par ExpressLRS, CRSF est devenu la référence pour les liaisons RC haute performance.
Caractéristiques techniques
- Débit de données : 420 000 bps
- Taux de rafraîchissement : Variable de 50Hz à 1000Hz (selon l'implémentation)
- Canaux : Jusqu'à 12 canaux
- Latence : Aussi basse que 2ms (à 1000Hz)
- Type de signal : Série UART non inversé
- Télémétrie : Communication bidirectionnelle intégrée
Forces
- Faible latence : Contrôle extrêmement réactif
- Télémétrie intégrée : Retour de données complet dans la même connexion
- Fonctionnalités avancées : Prise en charge des scripts LUA, mises à jour over-the-air, appairage de modèles
- Implémentation flexible : Utilisé par plusieurs systèmes RF avec des caractéristiques différentes
Limites
- Complexité : Plus d'options de configuration peuvent être écrasantes pour les débutants
- Exigences matérielles : Nécessite un contrôleur de vol avec UART disponible
- Variations d'implémentation : Différents systèmes utilisant CRSF peuvent avoir des capacités différentes
CRSF est mon protocole de choix pour les constructions sérieuses depuis 2018. La combinaison d'une faible latence, d'une télémétrie intégrée et de fonctionnalités avancées le rend difficile à battre. La conception du protocole permet d'excellentes performances dans un large éventail d'applications.
iBUS
Développé par FlySky, iBUS offre un protocole série simple avec télémétrie intégrée.
Caractéristiques techniques
- Débit de données : 115 200 bps
- Taux de rafraîchissement : Généralement 8ms (125Hz)
- Canaux : Jusqu'à 14 canaux
- Latence : ~12ms de bout en bout (typique)
- Type de signal : Série UART non inversé
- Télémétrie : Communication bidirectionnelle intégrée
Forces
- Pas d'inversion de signal : Fonctionne directement avec tous les contrôleurs de vol
- Télémétrie intégrée : Solution à un seul fil pour le contrôle et les données
- Simplicité : Configuration simple avec un minimum de configuration
Limites
- Écosystème limité : Principalement utilisé avec l'équipement FlySky
- Moins de fonctionnalités avancées : Par rapport à CRSF ou GHST
- Moins courant : Moins de support et de développement communautaire
J'ai utilisé iBUS dans plusieurs constructions à petit budget, et il fonctionne admirablement pour le rapport qualité-prix. Le signal non inversé est particulièrement pratique lorsqu'on travaille avec des contrôleurs de vol plus anciens, éliminant le besoin d'inverseurs de signal que SBUS nécessite.
GHST (Ghost)
Développé par ImmersionRC pour leur système Ghost, GHST offre un excellent équilibre de caractéristiques de performance.
Caractéristiques techniques
- Débit de données : 420 000 bps
- Taux de mise à jour : Variable de 50 Hz à 250 Hz
- Canaux : Jusqu'à 12 canaux
- Latence : Aussi basse que 5 ms
- Type de signal : Série UART non inversé
- Télémétrie : Communication bidirectionnelle intégrée
Forces
- Très faible latence : Excellente réactivité
- Bonne portée : Meilleures capacités de distance que la moyenne
- Implémentation propre : Protocole bien conçu avec une utilisation efficace de la bande passante
- Documentation ouverte : Spécifications de protocole transparentes
Limites
- Adoption limitée : Pas aussi largement utilisé que CRSF ou SBUS
- Moins d'options matérielles : Choix limité d'équipements compatibles
- Moins de développement communautaire : Écosystème plus petit d'outils et de ressources
J'ai testé GHST de manière approfondie et j'ai été impressionné par sa mise en œuvre technique. Le protocole atteint un excellent équilibre entre latence et portée, bien qu'il n'ait pas gagné la part de marché de certains concurrents.
DSMX
Développé par Spektrum, DSMX est largement utilisé aux États-Unis et dans les modèles prêts à voler.
Caractéristiques techniques
- Débit de données : Propriétaire
- Taux de mise à jour : 11 ms (91 Hz) ou 22 ms (45 Hz)
- Canaux : Jusqu'à 12 canaux
- Latence : ~14 ms (taux de trame de 11 ms) ou ~25 ms (taux de trame de 22 ms)
- Type de signal : Série propriétaire
- Télémétrie : Limitée dans la plupart des implémentations
Forces
- Répandu dans les modèles RTF : Courant dans les drones prêts à voler
- Forte présence sur le marché américain : Bien pris en charge en Amérique du Nord
- Simplicité de liaison : Processus de liaison du récepteur facile
Limites
- Écosystème fermé : Protocole propriétaire avec un support tiers limité
- Latence plus élevée : Pas aussi réactif que les protocoles plus récents
- Télémétrie limitée : Basique par rapport à CRSF ou GHST
Bien que je n'aie pas utilisé DSMX aussi intensivement que d'autres protocoles, j'ai travaillé avec plusieurs drones équipés de Spektrum. Le protocole est fiable mais semble daté par rapport aux alternatives plus récentes, en particulier en termes de latence et de fonctionnalités.
F.Port
Développé par FrSky, F.Port combine le contrôle SBUS et la télémétrie SmartPort en une seule connexion.
Caractéristiques techniques
- Débit de données : 115 200 bps
- Taux de mise à jour : Généralement 9 ms (111 Hz)
- Canaux : Jusqu'à 16 proportionnels + 2 numériques
- Latence : ~14 ms de bout en bout (typique)
- Type de signal : UART half-duplex
- Télémétrie : Communication bidirectionnelle intégrée
Forces
- Solution à un seul fil : Combine le contrôle et la télémétrie
- Compatibilité : Fonctionne avec l'écosystème FrSky existant
- Efficacité des ressources : Libère des ports UART sur le contrôleur de vol
Limites
- Spécifique à FrSky : Limité à l'équipement FrSky
- Complexité de configuration : Peut être délicat à configurer correctement
- Popularité en déclin : Remplacé par des protocoles plus récents
J'ai converti plusieurs de mes constructions FrSky de SBUS/SmartPort séparés à F.Port. La solution à un seul fil est élégante, bien que j'ai trouvé la configuration plus délicate que prévu, nécessitant souvent des mises à jour du firmware du récepteur et de l'émetteur.
Protocoles FrSky
FrSky a développé plusieurs protocoles qui méritent une mention spécifique en raison de leur utilisation généralisée dans la communauté des drones.
ACCST (Advanced Continuous Channel Shifting Technology)
Le protocole numérique original de FrSky qui a gagné une adoption généralisée :
- Débit de données : Variable
- Taux de mise à jour : Généralement 9 ms (111 Hz)
- Canaux : Jusqu'à 16 canaux (mode D16)
- Latence : ~14 ms de bout en bout (typique)
- Type de signal : 2,4 GHz FHSS
- Télémétrie : Disponible via une connexion SmartPort séparée
Variantes :
- D8 : Mode 8 canaux compatible avec les anciens récepteurs
- D16 : Mode 16 canaux avec fonctionnalités améliorées
- LR12 : Variante longue portée avec des canaux réduits
J'ai utilisé ACCST D16 pendant des années et j'ai trouvé que c'était un protocole fiable pour le vol quotidien. Bien que pas aussi avancé que les options plus récentes, il offrait des performances constantes et une bonne compatibilité avec une large gamme de contrôleurs de vol.
ACCESS (Advanced Communication Control, Elevated Spread Spectrum)
Le nouveau protocole de FrSky introduit en 2019 en remplacement d'ACCST :
- Débit de données : Supérieur à ACCST
- Taux de mise à jour : Généralement 9 ms (111 Hz)
- Canaux : Jusqu'à 24 canaux
- Latence : ~12-14 ms de bout en bout (typique)
- Type de signal : 2,4 GHz FHSS avec sécurité renforcée
- Télémétrie : Intégrée avec une bande passante plus élevée
Principales caractéristiques :
- Sécurité renforcée : Utilise une liaison d'ID unique pour empêcher les connexions non autorisées
- Mises à jour par liaison radio : Possibilité de mettre à jour le firmware du récepteur depuis l'émetteur
- Analyse du spectre : Balayage de fréquence intégré pour éviter les interférences
- Smart Match : Processus de liaison simplifié avec enregistrement du récepteur
Mon expérience avec ACCESS a été mitigée. Bien que les fonctionnalités de sécurité améliorées et les mises à jour OTA soient précieuses, la transition depuis ACCST était déroutante en raison de problèmes de compatibilité. Lorsqu'il est correctement configuré, ACCESS offre des performances légèrement meilleures qu'ACCST en termes de portée et de fiabilité, mais les différences ne sont pas spectaculaires pour les scénarios de vol typiques.
Protocoles hérités
Bien que moins courants dans les drones modernes, ces protocoles méritent d'être compris pour le contexte historique :
PWM (Modulation de largeur d'impulsion)
- Caractéristiques : Un fil par canal, contrôle direct des servos
- Limitations : Câblage encombrant, canaux limités, sensible aux interférences
- Utilisation actuelle : Rarement utilisé dans les drones modernes, sauf pour les connexions directes aux servos
PPM (Modulation de position d'impulsion)
- Caractéristiques : Plusieurs canaux sur un seul fil, signal analogique
- Limitations : Canaux limités (généralement 8), latence modérée
- Utilisation actuelle : Parfois présent dans les équipements basiques ou plus anciens
PCM (Modulation par impulsions codées)
- Caractéristiques : Encodage numérique des signaux de contrôle
- Avantages : Meilleure détection d'erreurs que PPM
- Utilisation actuelle : Largement remplacé par des protocoles numériques plus récents
Comparaison des performances des protocoles
Après des tests approfondis dans diverses conditions, voici comment les principaux protocoles se comparent sur les métriques de performance clés.
Comparaison de la latence
Mesurée du mouvement du manche à la réponse du contrôleur de vol :
| Protocole | Latence minimale | Latence typique | Notes |
|---|---|---|---|
| ExpressLRS | 2ms | 4-10ms | Varie avec le taux de paquets (1000Hz-50Hz) |
| GHST | 5ms | 7-12ms | Varie avec le taux de paquets (250Hz-50Hz) |
| CRSF (Crossfire) | 6ms | 10-15ms | Varie avec le taux de paquets (150Hz-50Hz) |
| iBUS | 10ms | 12-15ms | Relativement constant |
| F.Port | 12ms | 14-16ms | Similaire à SBUS |
| SBUS | 12ms | 14-16ms | Relativement constant |
| DSMX | 14ms | 14-25ms | Dépend du réglage de la fréquence d'images |
D'après mon expérience, les différences de latence deviennent perceptibles autour de 5ms. Piloter en ExpressLRS à 500Hz procure une sensation de réactivité nettement supérieure à SBUS, en particulier lors de manœuvres rapides et de corrections.
Comparaison de la portée
Basé sur mes tests avec une puissance de sortie comparable (100mW) et des antennes standard :
| Protocole | Portée typique | Portée maximale | Notes |
|---|---|---|---|
| ExpressLRS 2.4GHz (50Hz) | 5-10km | 30km+ | Rapport portée/latence exceptionnel |
| TBS Crossfire 900MHz | 5-10km | 40km+ | Standard de l'industrie pour la longue portée |
| ExpressLRS 900MHz (25Hz) | 10-20km | 50km+ | Champion actuel de la portée |
| GHST 2.4GHz | 3-5km | 10km+ | Bon équilibre entre portée et latence |
| FrSky R9 900MHz | 3-5km | 15km+ | Bonne portée mais moins fiable que les systèmes plus récents |
| FrSky ACCST 2.4GHz | 1-2km | 5km | Adéquat pour la plupart des vols |
| FlySky AFHDS 2A | 0.5-1.5km | 3km | Limité mais suffisant pour le vol en vue directe |
| DSMX | 1-2km | 3km | Adéquat pour la plupart des vols |
Ces portées supposent des conditions optimales avec une ligne de vue dégagée. La portée réelle est affectée par les obstacles, les interférences, le positionnement des antennes et d'autres facteurs.
Comparaison de la fiabilité
Basé sur mon expérience de vol dans divers environnements :
| Protocole | Résistance aux interférences | Fiabilité du failsafe | Robustesse globale |
|---|---|---|---|
| ExpressLRS | Excellente | Excellente | Excellente |
| TBS Crossfire | Excellente | Excellente | Excellente |
| GHST | Très bonne | Très bonne | Très bonne |
| FrSky R9 | Bonne | Bonne | Bonne |
| F.Port | Bonne | Bonne | Bonne |
| SBUS | Bonne | Bonne | Bonne |
| iBUS | Bonne | Bonne | Bonne |
| DSMX | Bonne | Bonne | Bonne |
| FrSky ACCST | Passable | Bonne | Passable |
| FlySky AFHDS 2A | Passable | Passable | Passable |
J'ai trouvé ExpressLRS et Crossfire exceptionnellement fiables même dans des environnements RF difficiles. Lors d'un vol mémorable près d'une tour radio, ma liaison ExpressLRS a maintenu une connexion solide tandis que le système ACCST d'un ami subissait de multiples failsafes.
Comparaison des fonctionnalités
| Protocole | Télémétrie | Mises à jour OTA | Méthode d'appairage | Fonctionnalités avancées |
|---|---|---|---|---|
| CRSF | Complète | Oui | Variable | Étendues (scripts LUA, correspondance de modèle, puissance dynamique) |
| ExpressLRS | Configurable | Oui | Phrase d'appairage | Étendues (puissance dynamique, mises à jour WiFi) |
| GHST | Complète | Oui | Pression de bouton | Bonnes (correspondance de modèle, puissance dynamique) |
| F.Port | Complète | Limitées | Pression de bouton | Limitées à l'écosystème FrSky |
| FrSky (SmartPort) | Complète | Limitées | Pression de bouton | Limitées à l'écosystème FrSky |
| iBUS | Basique | Non | Pression de bouton | Limitées |
| SBUS | Aucune (séparée) | Non | Pression de bouton | Limitées |
| DSMX | Basique | Non | Pression de bouton | Limitées (correspondance de modèle) |
L'écart de fonctionnalités entre les protocoles plus récents comme CRSF/ExpressLRS et les standards plus anciens est substantiel. La possibilité de mettre à jour le firmware par liaison radio et d'accéder à une télémétrie complète a transformé la façon dont j'interagis avec mes drones.
Choisir le bon protocole
Avec autant d'options, choisir le bon protocole peut être écrasant. Voici mes conseils pratiques basés sur différents scénarios de vol.
Pour la course
Priorité : Latence minimale et performances fiables dans des environnements RF encombrés
- Meilleur choix : ExpressLRS à 500Hz ou plus
- Alternative : GHST à 250Hz
- Option budget : iBUS (si utilisation d'équipement FlySky)
Pour la course, j'utilise exclusivement ExpressLRS à 500Hz. La combinaison d'une latence ultra-faible et d'une excellente résistance aux interférences est inégalée, en particulier dans les environnements de course encombrés où des dizaines d'émetteurs vidéo et de liaisons de contrôle fonctionnent simultanément.
Pour le freestyle
Priorité : Bon équilibre entre réactivité et portée
- Meilleur choix : ExpressLRS à 250Hz
- Alternative : CRSF (Crossfire) à 150Hz
- Option budget : F.Port ou SBUS avec équipement FrSky
Le vol freestyle bénéficie de commandes réactives mais ne nécessite pas la latence minimale absolue de la course. J'ai trouvé qu'ExpressLRS à 250Hz est le juste milieu, offrant un excellent feeling des manches tout en maintenant une portée plus que suffisante pour les sessions de freestyle typiques.
Pour la longue portée
Priorité : Portée maximale fiable avec une latence acceptable
- Meilleur choix : ExpressLRS 900MHz à 25-50Hz
- Alternative : TBS Crossfire 900MHz
- Option budget : FrSky R9 (avec limitations)
Pour mes constructions dédiées à la longue portée, ExpressLRS 900MHz à 25Hz s'est avéré imbattable. La combinaison d'une conception de protocole efficace, de la modulation LoRa et d'un faible taux de paquets permet une portée extraordinaire tout en maintenant une réactivité de contrôle utilisable.
Pour les débutants
Priorité : Simplicité, fiabilité et performances adéquates
- Meilleur choix : ExpressLRS à 100Hz (avec les conseils appropriés)
- Alternative : SBUS ou F.Port avec l'équipement FrSky
- Option budget : iBUS avec l'équipement FlySky
Bien qu'ExpressLRS offre les meilleures performances, ses options de configuration peuvent submerger les débutants. Si vous aidez un nouveau pilote, fournissez soit une assistance de configuration avec ExpressLRS, soit recommandez un système plus simple comme FrSky avec SBUS, qui offre de bonnes performances avec moins de complexité.
Pour le vol cinématique
Priorité : Contrôle fluide et liaison fiable
- Meilleur choix : ExpressLRS à 100Hz ou 50Hz
- Alternative : CRSF (Crossfire) à 50Hz
- Option budget : SBUS ou F.Port
Le vol cinématique bénéficie d'entrées de contrôle fluides plutôt que d'une réponse rapide. Des taux de paquets plus faibles (50-100Hz) fournissent une réactivité plus que suffisante tout en maximisant la portée et la fiabilité. J'utilise souvent ExpressLRS à 50Hz pour mes constructions cinématiques, car il offre une excellente portée avec un contrôle toujours fluide.
Dépannage des problèmes de protocole
Même avec une implémentation correcte, des problèmes de protocole RC peuvent survenir. Voici comment je diagnostique et résous les problèmes courants.
Problèmes courants et solutions
Connexion intermittente
Symptômes : Failsafes aléatoires, problèmes de contrôle ou pertes de télémétrie
Causes possibles et solutions :
- Interférences :
- Éloigner l'antenne de l'émetteur vidéo de l'antenne du récepteur
- Blinder la carte de distribution d'alimentation
- Utiliser des noyaux de ferrite sur les fils d'alimentation
- Problèmes d'antenne :
- Vérifier si les antennes sont endommagées
- Assurer une orientation correcte de l'antenne
- Vérifier que les connexions d'antenne sont sécurisées
- Problèmes d'alimentation :
- Vérifier que le récepteur reçoit du 5V propre
- Ajouter un condensateur à l'entrée d'alimentation
- Vérifier les chutes de tension sous charge
J'ai déjà chassé un problème de connexion intermittente pendant des semaines avant de découvrir que mon antenne VTX était positionnée trop près de mon antenne réceptrice. Les éloigner de seulement 3cm a complètement résolu le problème.
Pas de réponse de contrôle
Symptômes : Émetteur connecté mais pas de réponse du drone
Causes possibles et solutions :
- Incompatibilité de protocole :
- Vérifier que le bon protocole est sélectionné dans le contrôleur de vol
- Vérifier les paramètres du module émetteur
- Configuration UART :
- Confirmer que l'UART est correctement attribué au Serial RX
- Vérifier que les connexions TX/RX sont correctes
- Inversion de signal :
- Vérifier si le paramètre d'inversion correspond aux exigences du protocole
- Vérifier l'inverseur matériel s'il est utilisé
- Mappage des canaux :
- S'assurer que les canaux sont mappés correctement
- Vérifier les problèmes d'ordre AETR vs TAER
Le problème de "pas de réponse" le plus courant que je rencontre est une mauvaise attribution d'UART. Toujours vérifier deux fois que l'UART auquel vous vous êtes connecté est correctement configuré pour Serial RX dans l'onglet ports.
Problèmes de télémétrie
Symptômes : Pas de données de télémétrie ou télémétrie intermittente
Causes possibles et solutions :
- Connexion manquante :
- Vérifier la connexion bidirectionnelle pour les protocoles qui l'exigent
- Vérifier que le pad TX est connecté pour les protocoles de télémétrie
- Problèmes de configuration :
- Activer la télémétrie dans l'émetteur
- Vérifier les paramètres de ratio de télémétrie (pour ExpressLRS)
- Incompatibilité logicielle :
- Mettre à jour le firmware sur l'émetteur et le récepteur
- Assurer des versions compatibles
Pour ExpressLRS, j'ai constaté que le ratio de télémétrie est crucial pour des données fiables. Pour les vols longue portée, j'utilise un ratio conservateur de 1:128 pour donner la priorité à la stabilité de la liaison de contrôle par rapport à la fréquence de télémétrie.
Difficultés de liaison
Symptômes : Impossible de lier le récepteur à l'émetteur
Causes possibles et solutions :
- Problèmes spécifiques au protocole :
- ExpressLRS : Vérifier que les phrases de liaison et les versions de firmware correspondent
- Crossfire : Utiliser le script LUA pour la liaison
- FrSky : Vérifier la compatibilité des versions EU/FCC
- Problèmes matériels :
- S'assurer que le récepteur est correctement alimenté pendant la liaison
- Essayer le bouton de liaison physique s'il est disponible
- Problèmes de distance :
- Garder l'émetteur et le récepteur proches pendant la liaison
- Supprimer les sources potentielles d'interférences
Les problèmes de liaison sont souvent spécifiques au protocole. Avec ExpressLRS, la plupart des problèmes de liaison que j'ai rencontrés sont liés à des versions de firmware ou des phrases de liaison non correspondantes. Toujours vérifier qu'elles correspondent exactement entre l'émetteur et le récepteur.
Outils et techniques de diagnostic
Indicateurs de qualité du signal du récepteur
La plupart des protocoles modernes fournissent des métriques de qualité du signal :
- RSSI (Indicateur de force du signal reçu) :
- Mesure la force globale du signal
- Généralement affiché en pourcentage
- Les valeurs inférieures à 50% indiquent des problèmes potentiels
- LQ (Qualité de liaison) :
- Mesure le taux de réussite des paquets
- Plus utile que le RSSI pour les systèmes numériques
- Les valeurs inférieures à 70% justifient une enquête
- Mode RF :
- Indique le mode de fonctionnement actuel (par exemple, ExpressLRS bascule entre 250Hz/50Hz en fonction du signal)
- Aide à vérifier que les systèmes dynamiques fonctionnent correctement
Je me fie beaucoup au LQ pour les systèmes ExpressLRS et Crossfire, car il fournit une indication plus significative de la santé de la liaison que le RSSI. La surveillance des tendances LQ pendant le vol peut fournir un avertissement précoce des problèmes potentiels.
Diagnostics du contrôleur de vol
Le contrôleur de vol peut fournir des informations de diagnostic précieuses :
- Onglet Récepteur :
- Vérifier que les mouvements des canaux correspondent aux entrées des manches
- Vérifier l'écrêtage du signal ou les valeurs anormales
- Confirmer que le mappage des canaux est correct
- Commandes CLI :
status- Affiche le fournisseur de Serial RX actifrxrange- Affiche les plages de canauxset serialrx_- Liste les paramètres actuels de Serial RX
- Journalisation Blackbox :
- Analyser les données de commande RC pour détecter les problèmes ou les incohérences
- Comparer les données RC avec la réponse du gyroscope pour l'évaluation de la latence
Lors du dépannage de problèmes de contrôle subtils, j'utilise souvent les logs Blackbox pour analyser les données de commande RC. Cela m'a aidé à identifier et à résoudre des problèmes tels qu'une mauvaise configuration du lissage RC qui n'étaient pas immédiatement apparents pendant le vol.
Here is the translated content in French with the same HTML formatting and updated links:
L'avenir des protocoles RC
Le paysage des protocoles RC continue d'évoluer rapidement. Voici les tendances et les développements que je suis de près.
Tendances actuelles
- Augmentation des taux de mise à jour : La recherche d'une latence plus faible se poursuit, avec 1000Hz maintenant disponibles et potentiellement des taux plus élevés à l'avenir.
- Développement open source : Les projets communautaires comme ExpressLRS innovent plus rapidement que les systèmes propriétaires.
- Agilité de fréquence : Les systèmes qui peuvent fonctionner sur plusieurs bandes (2,4 GHz, 900 MHz, 868 MHz) offrent une flexibilité pour différentes régions et applications.
- Intégration avec le FPV numérique : Une intégration plus étroite entre les systèmes de contrôle et de vidéo, partageant potentiellement des antennes ou des bandes de fréquences.
- Extension de la télémétrie : Des données de télémétrie plus complètes, y compris les statistiques de liaison vidéo et les paramètres de vol avancés.
Technologies émergentes
Plusieurs technologies prometteuses sont à l'horizon qui pourraient transformer davantage les protocoles RC :
- Traitement du signal amélioré par l'IA : Algorithmes d'apprentissage automatique qui s'adaptent aux environnements RF en temps réel.
- Réseau maillé : Réseaux distribués où plusieurs drones peuvent relayer des signaux, étendant la portée effective.
- Radio cognitive : Systèmes qui détectent automatiquement les canaux disponibles et modifient les paramètres de transmission en conséquence.
- Chiffrement résistant aux quantiques : À mesure que l'informatique quantique progresse, de nouvelles mesures de sécurité seront nécessaires pour les applications critiques.
- Radio logicielle (SDR) : Systèmes radio plus flexibles qui peuvent être reconfigurés via des mises à jour logicielles.
FAQ : Questions courantes sur les protocoles RC
Questions générales sur les protocoles
Les différents protocoles affectent-ils la durée de vie de la batterie ?
Oui, mais de manière minimale côté drone. Des taux de paquets plus élevés consomment légèrement plus d'énergie dans le récepteur, mais la différence est négligeable par rapport à la consommation d'énergie du moteur. Côté émetteur, l'effet peut être plus perceptible, les systèmes à haute puissance et à haut débit de paquets déchargeant les batteries plus rapidement.
Puis-je utiliser plusieurs protocoles sur le même drone ?
Bien que techniquement possible (par exemple, contrôle via un protocole et télémétrie via un autre), ce n'est généralement pas recommandé en raison de la complexité ajoutée et des interférences potentielles. Les protocoles intégrés modernes éliminent le besoin de cette approche.
Comment les protocoles affectent-ils la transmission vidéo ?
Ce sont des systèmes séparés, mais ils peuvent s'affecter mutuellement par des interférences. Certains systèmes avancés comme DJI O3 et Walksnail commencent à intégrer la transmission de contrôle et de vidéo pour une meilleure coordination et une réduction des interférences.
Existe-t-il des restrictions légales sur les protocoles RC ?
Oui, l'utilisation des fréquences et la puissance de sortie sont réglementées différemment dans divers pays. Vérifiez toujours les réglementations locales, en particulier pour les systèmes 900 MHz qui ont des allocations de fréquences différentes dans le monde entier (868 MHz dans l'UE, 915 MHz aux États-Unis).
Questions techniques sur les protocoles
Quelle est la différence entre RSSI et LQ ?
RSSI (Indicateur de force du signal reçu) mesure la puissance brute du signal, tandis que LQ (Qualité de la liaison) mesure le pourcentage de paquets reçus avec succès. LQ est généralement plus utile pour les systèmes numériques car il indique directement la fiabilité de la communication.
Comment le taux de paquets affecte-t-il la latence et la portée ?
Des taux de paquets plus élevés réduisent la latence mais diminuent généralement la portée en raison d'un temps réduit pour la correction d'erreurs et d'une énergie plus faible par paquet. C'est pourquoi le vol longue portée utilise des taux de paquets plus faibles (25-50 Hz) tandis que la course utilise des taux plus élevés (500 Hz et plus).
Qu'est-ce qui provoque des failsafes même avec un bon RSSI/LQ ?
Plusieurs facteurs peuvent causer cela : interférences sur des fréquences spécifiques, blocage momentané du signal, problèmes matériels du récepteur ou problèmes d'alimentation. Un bon RSSI ne garantit pas que tous les paquets sont reçus correctement.
Puis-je améliorer les performances du protocole avec de meilleures antennes ?
Absolument. La qualité, le type et le placement de l'antenne peuvent affecter considérablement la portée et la fiabilité. Pour les applications critiques, l'utilisation de systèmes de diversité avec plusieurs antennes dans différentes orientations offre les meilleures performances.
Questions sur la sélection du protocole
ExpressLRS est-il vraiment bien meilleur que les autres protocoles ?
Pour la plupart des métriques (latence, portée, flexibilité), oui. La nature open source a permis un développement et une optimisation rapides. Cependant, d'autres protocoles peuvent offrir des avantages dans des domaines spécifiques comme l'intégration de l'écosystème ou la simplicité.
Dois-je choisir 2,4 GHz ou 900 MHz pour la longue portée ?
900 MHz offre généralement une meilleure pénétration et une meilleure portée en raison de la fréquence plus basse, mais les systèmes 2,4 GHz peuvent toujours atteindre une portée impressionnante avec des paramètres optimisés. Si la portée maximale est la priorité et que 900 MHz est légal dans votre région, c'est généralement le meilleur choix.
Quel protocole a la meilleure résistance aux interférences ?
ExpressLRS et TBS Crossfire excellent tous deux ici, avec un saut de fréquence sophistiqué et une correction d'erreur. ExpressLRS à des taux de paquets plus élevés (250 Hz et plus) est particulièrement bon dans les environnements RF encombrés comme les événements de course.
Vaut-il la peine de passer de SBUS à un protocole plus récent ?
Pour la plupart des pilotes, oui. Les améliorations de la latence, de l'intégration de la télémétrie et de la fiabilité sont perceptibles. Les plus gros gains proviennent de la mise à niveau à la fois du système RF (par exemple, vers ExpressLRS) et du protocole entre le récepteur et le contrôleur de vol (par exemple, vers CRSF).
Conclusion
Les protocoles RC ont considérablement évolué, passant des simples systèmes analogiques du passé aux communications numériques sophistiquées d'aujourd'hui. La compréhension de ces protocoles est cruciale pour optimiser les performances et la fiabilité de votre drone.
Le paysage actuel est dominé par des protocoles série comme SBUS pour les systèmes traditionnels, CRSF pour les applications haute performance et des protocoles spécialisés comme GHST et iBUS pour des écosystèmes spécifiques. Pendant ce temps, les systèmes RF qui implémentent ces protocoles continuent de progresser, ExpressLRS établissant de nouvelles normes de performance et de valeur.
Lors de la sélection d'un protocole, tenez compte de vos besoins spécifiques :
- Pour la course, donnez la priorité à une latence minimale avec ExpressLRS à des taux de paquets élevés
- Pour le freestyle, équilibrez la réactivité et la portée avec des taux de paquets modérés
- Pour la longue portée, concentrez-vous sur la fiabilité et la pénétration avec les systèmes 900 MHz
- Pour les débutants, choisissez des systèmes avec une bonne documentation et un bon support communautaire
N'oubliez pas qu'une mise en œuvre appropriée est tout aussi importante que la sélection du protocole. Le placement des antennes, les paramètres de configuration et la maintenance régulière jouent tous un rôle crucial dans l'obtention des performances optimales.
À mesure que la technologie continue de progresser, nous pouvons nous attendre à des capacités encore plus impressionnantes des futurs protocoles RC. La tendance au développement open source, aux taux de mise à jour plus élevés et à une intégration plus étroite avec d'autres systèmes promet un avenir passionnant pour les systèmes de contrôle des drones.
Voici le contenu traduit en français avec la structure HTML et les liens préservés :


