Resumen de los protocolos RC para drones

Los protocolos de control de radio son los lenguajes digitales que permiten que su transmisor se comunique con su dron. Después de años de probar varios sistemas de RC en diferentes condiciones de vuelo, he aprendido que comprender estos protocolos es crucial para optimizar el rendimiento y la confiabilidad. Esta guía completa explora los principales protocolos de RC disponibles en la actualidad y sus características técnicas, centrándose específicamente en los estándares de comunicación en lugar de los ecosistemas de hardware que los implementan.
Introducción a los protocolos de RC
Cuando hablamos de sistemas de control de radio para drones, a menudo nos enfocamos en los transmisores y receptores físicos. Sin embargo, es el protocolo subyacente, el estándar de comunicación que define cómo se empaquetan, transmiten e interpretan los datos, lo que realmente determina el rendimiento. Piense en los protocolos como diferentes idiomas: aunque todos permiten la comunicación, algunos son más eficientes, precisos o robustos que otros en situaciones específicas.
Todavía recuerdo mis primeros días de vuelo con receptores PWM básicos, donde cada canal requería un cable separado y la interferencia de señal era una preocupación constante. La evolución a los protocolos digitales modernos ha transformado la confiabilidad y las capacidades de los sistemas de RC, permitiendo características que alguna vez fueron inimaginables.
La evolución de los protocolos de RC
La comunicación de RC ha evolucionado dramáticamente a lo largo de las décadas:
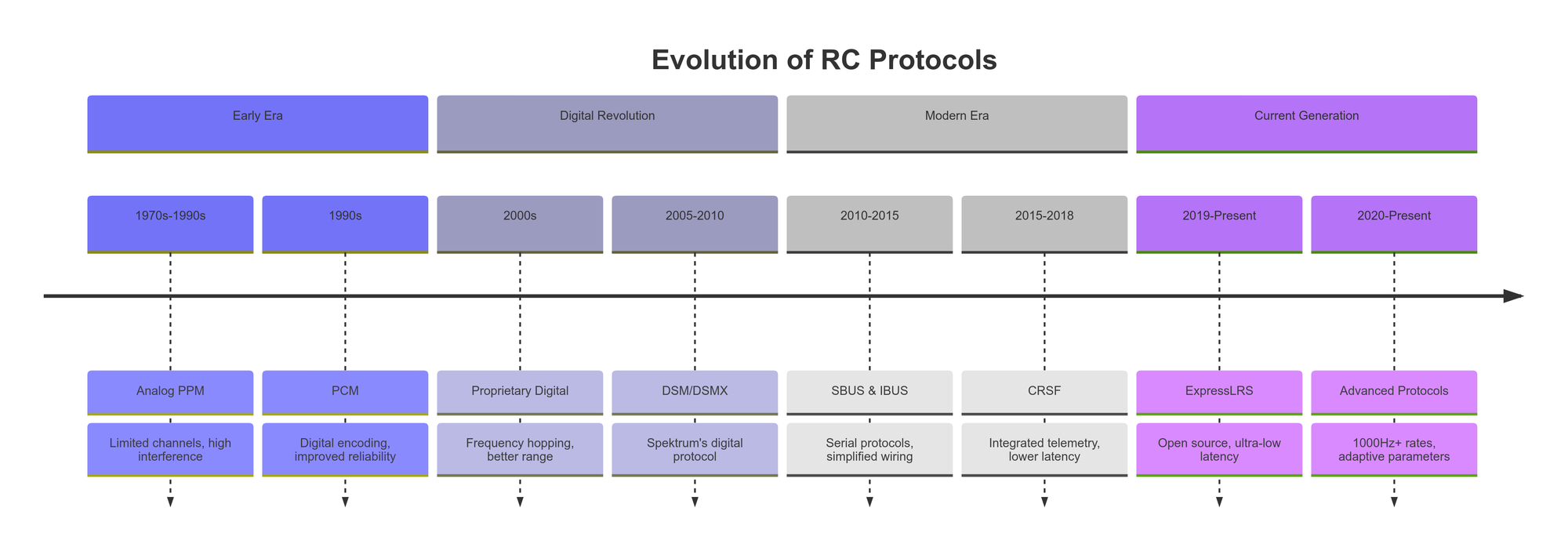
- Primeros días (1970-1990): PPM analógico simple (Modulación por posición de pulso) con canales limitados y susceptibilidad a interferencias.
- Revolución digital (2000): Introducción de PCM (Modulación por código de pulso) y los primeros protocolos digitales propietarios con mayor confiabilidad y características. Esto fue un cambio de juego: de repente, las fallas en el aire se volvieron mucho menos comunes.
- Era moderna (2010): Desarrollo de sofisticados protocolos en serie como SBUS, CRSF e iBUS, que ofrecen múltiples canales, telemetría y características avanzadas.
- Generación actual (2020): Protocolos avanzados que empujan los límites del rendimiento con tasas de actualización y alcance sin precedentes. Las mejoras técnicas en el diseño de protocolos han permitido un rendimiento que no era posible con equipos de consumo hace solo unos años.
Por qué importan los protocolos
El protocolo que elija afecta varios aspectos críticos de su experiencia de vuelo:
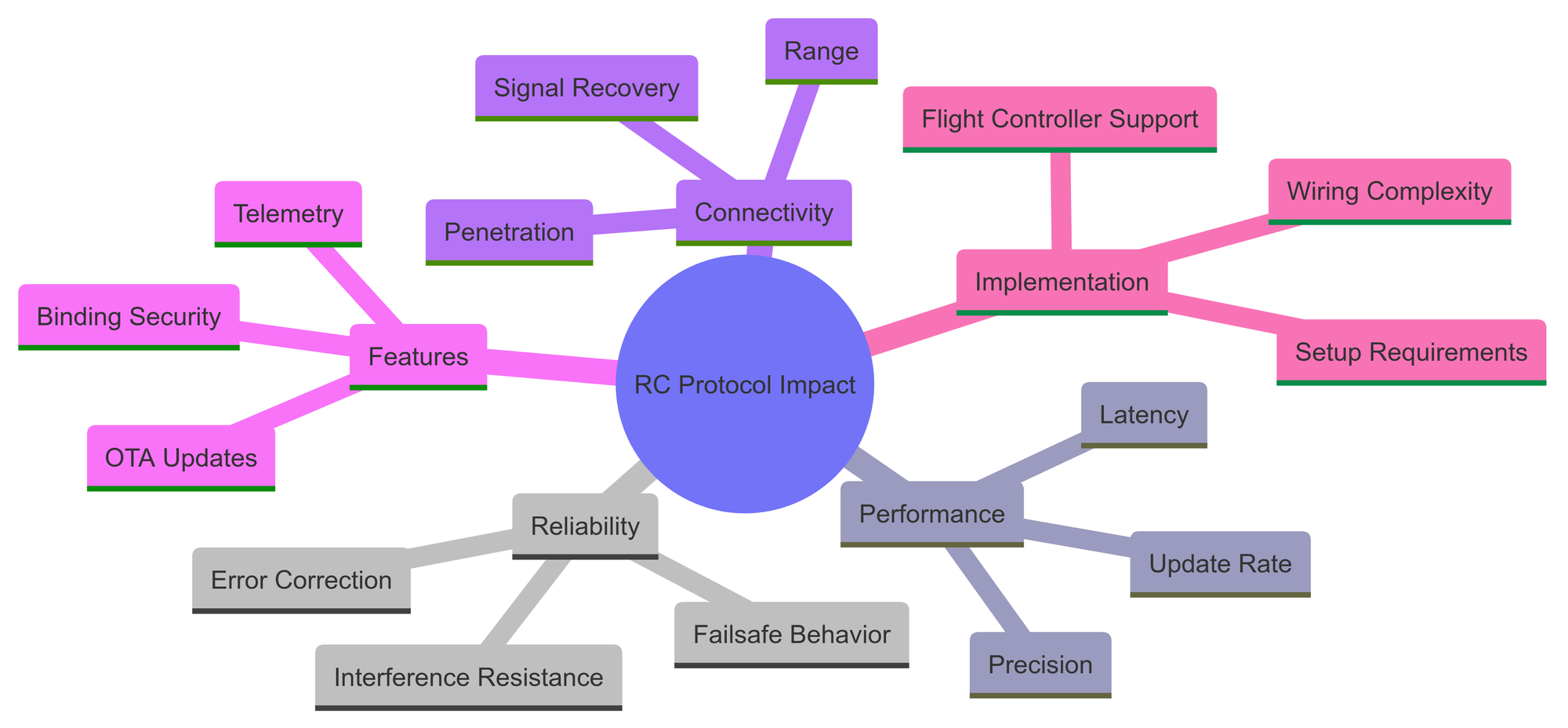
- Latencia: Qué tan rápido se traducen los movimientos de los sticks a la respuesta del dron
- Alcance: Qué tan lejos puede volar mientras mantiene un control confiable
- Confiabilidad: Qué tan resistente es el enlace a las interferencias y la pérdida de señal
- Características: Qué capacidades adicionales están disponibles (telemetría, actualizaciones por aire, etc.)
- Requisitos de hardware: Qué equipo se necesita para usar el protocolo
He experimentado de primera mano cómo cambiar de protocolo puede transformar el rendimiento de un dron. El protocolo adecuado puede marcar la diferencia entre un dron que se siente lento y poco receptivo y uno que se siente como una extensión de sus pensamientos.
Comprendiendo los fundamentos del protocolo
Antes de profundizar en protocolos específicos, es importante comprender los conceptos técnicos que los diferencian.
Conceptos técnicos clave
Modulación de señal
Cómo se codifica la información en la onda portadora:

- Espectro ensanchado por salto de frecuencia (FHSS): Cambia rápidamente las frecuencias según un patrón predeterminado, mejorando la resistencia a las interferencias. La mayoría de los protocolos modernos utilizan alguna forma de FHSS.
- Espectro ensanchado por secuencia directa (DSSS): Extiende la señal a través de un ancho de banda amplio, haciéndola resistente a interferencias de banda estrecha. Menos común en aplicaciones de drones.
- Agilidad de frecuencia adaptativa: Sistemas avanzados que detectan y evitan activamente las interferencias cambiando los patrones de frecuencia. He encontrado estos particularmente valiosos cuando vuelo en entornos urbanos con ruido de RF impredecible.
Tasas de datos y estructura de paquetes
Cómo se empaqueta y transmite la información:
| Concepto | Descripción | Impacto en el rendimiento |
|---|---|---|
| Tasa de paquetes | Número de paquetes de datos enviados por segundo (Hz) | Tasas más altas = menor latencia pero alcance reducido |
| Tamaño de paquete | Cantidad de información en cada transmisión | Paquetes más grandes = más datos pero mayor tiempo de transmisión |
| Corrección de errores | Métodos para detectar y recuperarse de errores | Corrección más robusta = mejor confiabilidad pero mayor latencia |
| Resolución de canal | Precisión de los valores de control (bits) | Mayor resolución = control más preciso pero paquetes más grandes |
| Encuadre | Cómo se estructuran e identifican los paquetes | Encuadre eficiente = menor sobrecarga y mejor rendimiento |
He experimentado extensamente con diferentes tasas de paquetes y descubrí que la configuración óptima varía dramáticamente según el estilo de vuelo. Para carreras, prefiero 500Hz o más para una latencia mínima, mientras que para crucero de largo alcance, 50Hz o menos proporciona un mejor alcance con una capacidad de respuesta aún aceptable.
Presupuesto de enlace
El balance de potencia general del enlace de radio:

Comprender el presupuesto de enlace ha sido crucial para mis construcciones de largo alcance. He aprendido que duplicar la potencia de transmisión agrega mucho menos alcance que optimizar las antenas o mejorar la sensibilidad del receptor.
Protocolo vs. Sistema de RF vs. Conexión Física
Es importante distinguir entre conceptos relacionados pero diferentes:
| Concepto | Descripción | Ejemplos |
|---|---|---|
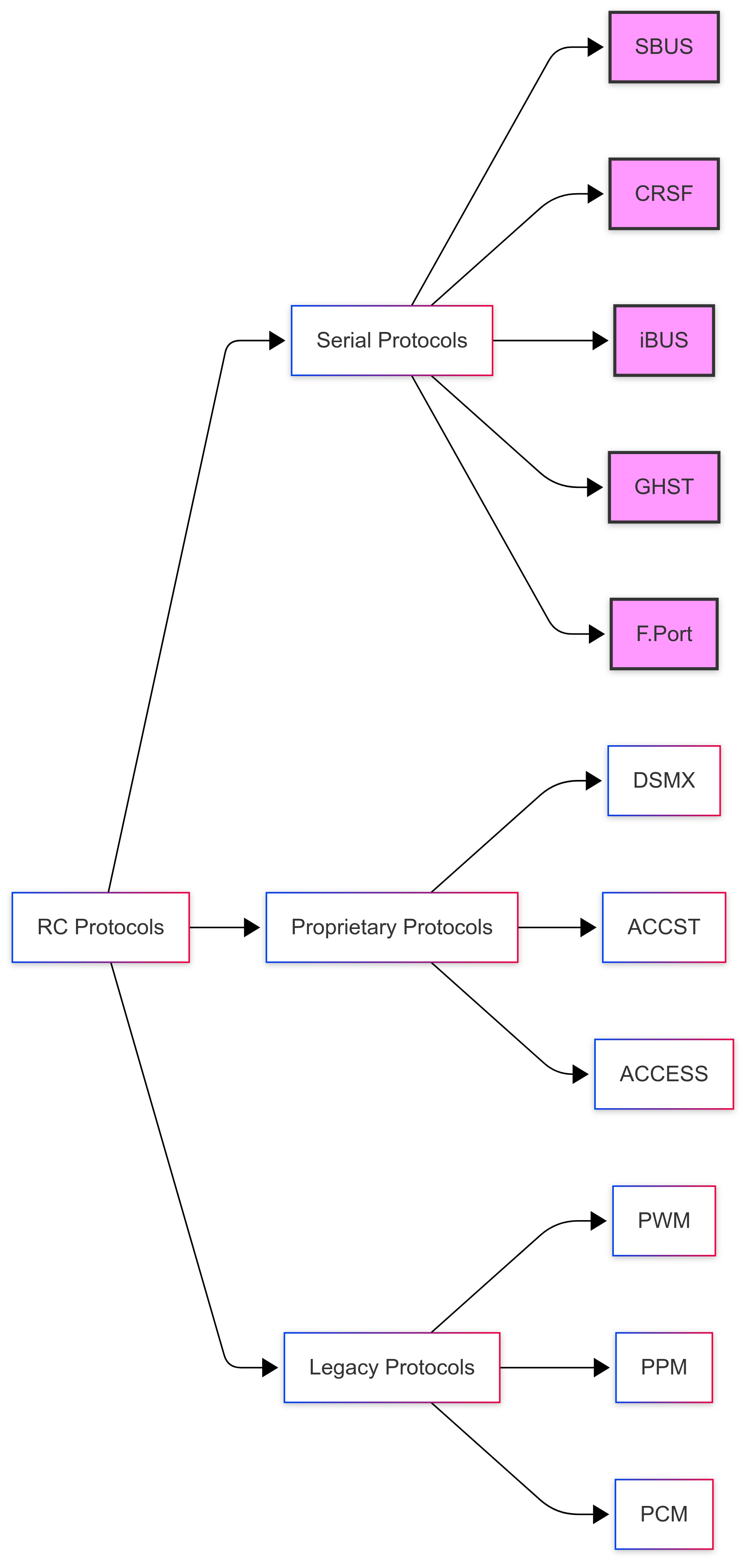
| Protocolo | Estándar de comunicación que define cómo se estructuran los datos | CRSF, SBUS, iBUS, GHST |
| Sistema de RF | Tecnología de radiofrecuencia utilizada para transmitir la señal | ExpressLRS, Crossfire, ACCST, DSMX |
| Conexión Física | Cómo se conecta el receptor al controlador de vuelo | UART, PWM, I2C, SPI |
Esta distinción es importante porque el mismo protocolo (por ejemplo, CRSF) puede ser utilizado por diferentes sistemas de RF (por ejemplo, TBS Crossfire y ExpressLRS), y el mismo sistema de RF a veces puede admitir múltiples protocolos.
Principales Protocolos de RC
Examinemos los protocolos más significativos en el mundo de los drones, basados en mis extensas pruebas y experiencia del mundo real.
Resumen de Comparación de Protocolos
SBUS (Bus Serie)
Desarrollado por Futaba y ampliamente adoptado por FrSky y otros, SBUS ha sido un estándar durante muchos años.
Características Técnicas
- Tasa de Datos: 100,000 bps
- Tasa de Actualización: Típicamente 9ms (111Hz)
- Canales: Hasta 16 proporcionales + 2 digitales
- Latencia: ~14ms de extremo a extremo (típico)
- Tipo de Señal: UART serie invertida
- Telemetría: No incluida en SBUS en sí (requiere conexión separada)
Fortalezas
- Compatibilidad Generalizada: Compatible con prácticamente todos los controladores de vuelo
- Simplicidad: Conexión de un solo cable al controlador de vuelo
- Confiabilidad: Historial comprobado en innumerables construcciones
Limitaciones
- Inversión de Señal: Requiere inversor para controladores de vuelo F1/F3 (F4 y más nuevos tienen inversores integrados)
- Latencia Moderada: No tan receptivo como protocolos más nuevos
- Sin Telemetría Integrada: Requiere conexión separada para datos de telemetría
He usado SBUS en docenas de construcciones a lo largo de los años, y sigue siendo una opción sólida y confiable. Aprecio particularmente su compatibilidad universal: nunca he encontrado un controlador de vuelo que no pudiera usar SBUS.
CRSF (Crossfire RF)
Desarrollado por Team BlackSheep para su sistema Crossfire y luego adoptado por ExpressLRS, CRSF se ha convertido en el estándar de oro para enlaces RC de alto rendimiento.
Características Técnicas
- Tasa de Datos: 420,000 bps
- Tasa de Actualización: Variable de 50Hz a 1000Hz (según la implementación)
- Canales: Hasta 12 canales
- Latencia: Tan baja como 2ms (a 1000Hz)
- Tipo de Señal: UART serie no invertida
- Telemetría: Comunicación bidireccional integrada
Fortalezas
- Baja Latencia: Control extremadamente receptivo
- Telemetría Integrada: Retroalimentación de datos completa en la misma conexión
- Características Avanzadas: Soporte para scripts LUA, actualizaciones por aire, coincidencia de modelos
- Implementación Flexible: Utilizado por múltiples sistemas de RF con diferentes características
Limitaciones
- Complejidad: Más opciones de configuración pueden ser abrumadoras para principiantes
- Requisitos de Hardware: Necesita controlador de vuelo con UART disponible
- Variaciones de Implementación: Diferentes sistemas que usan CRSF pueden tener diferentes capacidades
CRSF ha sido mi protocolo de elección para construcciones serias desde 2018. La combinación de baja latencia, telemetría integrada y características avanzadas lo hace difícil de superar. El diseño del protocolo permite un excelente rendimiento en una amplia gama de aplicaciones.
iBUS
Desarrollado por FlySky, iBUS ofrece un protocolo serie sencillo con telemetría integrada.
Características Técnicas
- Tasa de Datos: 115,200 bps
- Tasa de Actualización: Típicamente 8ms (125Hz)
- Canales: Hasta 14 canales
- Latencia: ~12ms de extremo a extremo (típico)
- Tipo de Señal: UART serie no invertida
- Telemetría: Comunicación bidireccional integrada
Fortalezas
- Sin Inversión de Señal: Funciona directamente con todos los controladores de vuelo
- Telemetría Integrada: Solución de un solo cable para control y datos
- Simplicidad: Configuración sencilla con mínima configuración
Limitaciones
- Ecosistema Limitado: Utilizado principalmente con equipos FlySky
- Menos Características Avanzadas: En comparación con CRSF o GHST
- Menos Común: Menos soporte y desarrollo de la comunidad
He usado iBUS en varias construcciones económicas, y se desempeña admirablemente para el punto de precio. La señal no invertida es particularmente conveniente cuando se trabaja con controladores de vuelo más antiguos, eliminando la necesidad de inversores de señal que requiere SBUS.
GHST (Ghost)
Desarrollado por ImmersionRC para su sistema Ghost, GHST ofrece un excelente equilibrio de características de rendimiento.
Características técnicas
- Tasa de datos: 420,000 bps
- Tasa de actualización: Variable de 50Hz a 250Hz
- Canales: Hasta 12 canales
- Latencia: Tan baja como 5ms
- Tipo de señal: UART serie no invertida
- Telemetría: Comunicación bidireccional integrada
Fortalezas
- Latencia muy baja: Excelente capacidad de respuesta
- Buen alcance: Capacidades de distancia superiores al promedio
- Implementación limpia: Protocolo bien diseñado con uso eficiente del ancho de banda
- Documentación abierta: Especificaciones de protocolo transparentes
Limitaciones
- Adopción limitada: No tan ampliamente utilizado como CRSF o SBUS
- Menos opciones de hardware: Selección limitada de equipos compatibles
- Menos desarrollo comunitario: Ecosistema más pequeño de herramientas y recursos
Probé GHST extensamente y quedé impresionado con su implementación técnica. El protocolo logra un excelente equilibrio entre latencia y alcance, aunque no ha ganado la cuota de mercado de algunos competidores.
DSMX
Desarrollado por Spektrum, DSMX es ampliamente utilizado en EE. UU. y en modelos listos para volar.
Características técnicas
- Tasa de datos: Propietaria
- Tasa de actualización: 11ms (91Hz) o 22ms (45Hz)
- Canales: Hasta 12 canales
- Latencia: ~14ms (tasa de cuadro de 11ms) o ~25ms (tasa de cuadro de 22ms)
- Tipo de señal: Serie propietaria
- Telemetría: Limitada en la mayoría de las implementaciones
Fortalezas
- Generalizado en modelos RTF: Común en drones listos para volar
- Fuerte presencia en el mercado estadounidense: Bien respaldado en América del Norte
- Simplicidad de enlace: Proceso sencillo de enlace del receptor
Limitaciones
- Ecosistema cerrado: Protocolo propietario con soporte limitado de terceros
- Mayor latencia: No tan receptivo como los protocolos más nuevos
- Telemetría limitada: Básica en comparación con CRSF o GHST
Si bien no he usado DSMX tan extensamente como otros protocolos, he trabajado con varios drones equipados con Spektrum. El protocolo es confiable pero se siente desactualizado en comparación con las alternativas más nuevas, particularmente en términos de latencia y conjunto de características.
F.Port
Desarrollado por FrSky, F.Port combina el control SBUS y la telemetría SmartPort en una sola conexión.
Características técnicas
- Tasa de datos: 115,200 bps
- Tasa de actualización: Típicamente 9ms (111Hz)
- Canales: Hasta 16 proporcionales + 2 digitales
- Latencia: ~14ms de extremo a extremo (típico)
- Tipo de señal: UART half-duplex
- Telemetría: Comunicación bidireccional integrada
Fortalezas
- Solución de un solo cable: Combina control y telemetría
- Compatibilidad: Funciona con el ecosistema FrSky existente
- Eficiencia de recursos: Libera puertos UART en el controlador de vuelo
Limitaciones
- Específico de FrSky: Limitado a equipos FrSky
- Complejidad de configuración: Puede ser difícil de configurar correctamente
- Popularidad en declive: Está siendo reemplazado por protocolos más nuevos
Convertí varias de mis construcciones de FrSky de SBUS/SmartPort separados a F.Port. La solución de un solo cable es elegante, aunque encontré que la configuración era más complicada de lo esperado, a menudo requiriendo actualizaciones de firmware tanto para el receptor como para el transmisor.
Protocolos FrSky
FrSky ha desarrollado varios protocolos que merecen mención específica debido a su uso generalizado en la comunidad de drones.
ACCST (Advanced Continuous Channel Shifting Technology)
El protocolo digital original de FrSky que ganó una amplia adopción:
- Tasa de datos: Variable
- Tasa de actualización: Típicamente 9ms (111Hz)
- Canales: Hasta 16 canales (modo D16)
- Latencia: ~14ms de extremo a extremo (típico)
- Tipo de señal: 2.4GHz FHSS
- Telemetría: Disponible a través de conexión SmartPort separada
Variantes:
- D8: Modo de 8 canales compatible con receptores más antiguos
- D16: Modo de 16 canales con características mejoradas
- LR12: Variante de largo alcance con canales reducidos
Usé ACCST D16 durante años y descubrí que era un protocolo confiable para volar todos los días. Si bien no es tan avanzado como las opciones más nuevas, proporcionó un rendimiento constante y una buena compatibilidad con una amplia gama de controladores de vuelo.
ACCESS (Advanced Communication Control, Elevated Spread Spectrum)
El protocolo más nuevo de FrSky introducido en 2019 como reemplazo de ACCST:
- Tasa de datos: Superior a ACCST
- Tasa de actualización: Típicamente 9ms (111Hz)
- Canales: Hasta 24 canales
- Latencia: ~12-14ms de extremo a extremo (típico)
- Tipo de señal: 2.4GHz FHSS con seguridad mejorada
- Telemetría: Integrada con mayor ancho de banda
Características clave:
- Seguridad mejorada: Utiliza un enlace de ID único para evitar conexiones no autorizadas
- Actualizaciones por aire: Capacidad para actualizar el firmware del receptor desde el transmisor
- Análisis de espectro: Escaneo de frecuencia incorporado para evitar interferencias
- Smart Match: Proceso de enlace simplificado con registro de receptor
Mi experiencia con ACCESS ha sido mixta. Si bien las funciones de seguridad mejoradas y las actualizaciones OTA son valiosas, la transición desde ACCST fue confusa debido a problemas de compatibilidad. Cuando se configura correctamente, ACCESS funciona un poco mejor que ACCST en términos de alcance y confiabilidad, pero las diferencias no son dramáticas para los escenarios de vuelo típicos.
Protocolos heredados
Aunque son menos comunes en los drones modernos, estos protocolos vale la pena entenderlos por su contexto histórico:
PWM (Modulación por Ancho de Pulso)
- Características: Un cable por canal, control directo de servo
- Limitaciones: Cableado voluminoso, canales limitados, susceptible a interferencias
- Uso Actual: Raramente utilizado en drones modernos, excepto para conexiones directas de servo
PPM (Modulación por Posición de Pulso)
- Características: Múltiples canales en un solo cable, señal analógica
- Limitaciones: Canales limitados (típicamente 8), latencia moderada
- Uso Actual: Ocasionalmente encontrado en equipos básicos o antiguos
PCM (Modulación por Código de Pulso)
- Características: Codificación digital de señales de control
- Ventajas: Mejor detección de errores que PPM
- Uso Actual: En gran parte reemplazado por protocolos digitales más nuevos
Comparación de Rendimiento de Protocolos
Después de extensas pruebas en diversas condiciones, así es como los principales protocolos se comparan en métricas clave de rendimiento.
Comparación de Latencia
Medido desde el movimiento del stick hasta la respuesta del controlador de vuelo:
| Protocolo | Latencia Mínima | Latencia Típica | Notas |
|---|---|---|---|
| ExpressLRS | 2ms | 4-10ms | Varía con la tasa de paquetes (1000Hz-50Hz) |
| GHST | 5ms | 7-12ms | Varía con la tasa de paquetes (250Hz-50Hz) |
| CRSF (Crossfire) | 6ms | 10-15ms | Varía con la tasa de paquetes (150Hz-50Hz) |
| iBUS | 10ms | 12-15ms | Relativamente consistente |
| F.Port | 12ms | 14-16ms | Similar a SBUS |
| SBUS | 12ms | 14-16ms | Relativamente consistente |
| DSMX | 14ms | 14-25ms | Depende de la configuración de la tasa de cuadros |
En mi experiencia, las diferencias de latencia se vuelven notables alrededor de 5ms. Volar ExpressLRS a 500Hz se siente notablemente más receptivo que SBUS, particularmente durante maniobras y correcciones rápidas.
Comparación de Alcance
Basado en mis pruebas con una potencia de salida comparable (100mW) y antenas estándar:
| Protocolo | Alcance Típico | Alcance Máximo | Notas |
|---|---|---|---|
| ExpressLRS 2.4GHz (50Hz) | 5-10km | 30km+ | Relación excepcional de alcance a latencia |
| TBS Crossfire 900MHz | 5-10km | 40km+ | Estándar de la industria para largo alcance |
| ExpressLRS 900MHz (25Hz) | 10-20km | 50km+ | Campeón actual de alcance |
| GHST 2.4GHz | 3-5km | 10km+ | Buen equilibrio de alcance y latencia |
| FrSky R9 900MHz | 3-5km | 15km+ | Buen alcance pero menos confiable que sistemas más nuevos |
| FrSky ACCST 2.4GHz | 1-2km | 5km | Adecuado para la mayoría de los vuelos |
| FlySky AFHDS 2A | 0.5-1.5km | 3km | Limitado pero suficiente para línea de visión |
| DSMX | 1-2km | 3km | Adecuado para la mayoría de los vuelos |
Estos alcances asumen condiciones óptimas con línea de visión clara. El alcance en el mundo real se ve afectado por obstáculos, interferencias, posicionamiento de antenas y otros factores.
Comparación de Confiabilidad
Basado en mi experiencia volando en varios entornos:
| Protocolo | Resistencia a Interferencias | Confiabilidad de Failsafe | Robustez General |
|---|---|---|---|
| ExpressLRS | Excelente | Excelente | Excelente |
| TBS Crossfire | Excelente | Excelente | Excelente |
| GHST | Muy Buena | Muy Buena | Muy Buena |
| FrSky R9 | Buena | Buena | Buena |
| F.Port | Buena | Buena | Buena |
| SBUS | Buena | Buena | Buena |
| iBUS | Buena | Buena | Buena |
| DSMX | Buena | Buena | Buena |
| FrSky ACCST | Regular | Buena | Regular |
| FlySky AFHDS 2A | Regular | Regular | Regular |
He encontrado que ExpressLRS y Crossfire son excepcionalmente confiables incluso en entornos de RF desafiantes. Durante un vuelo memorable cerca de una torre de radio, mi enlace ExpressLRS mantuvo una conexión sólida mientras que el sistema ACCST de un amigo experimentó múltiples failsafes.
Comparación de Características
| Protocolo | Telemetría | Actualizaciones OTA | Método de Enlace | Características Avanzadas |
|---|---|---|---|---|
| CRSF | Completa | Sí | Variable | Extensas (scripts LUA, coincidencia de modelo, potencia dinámica) |
| ExpressLRS | Configurable | Sí | Frase de Enlace | Extensas (potencia dinámica, actualizaciones WiFi) |
| GHST | Completa | Sí | Pulsación de Botón | Buenas (coincidencia de modelo, potencia dinámica) |
| F.Port | Completa | Limitadas | Pulsación de Botón | Limitadas al ecosistema FrSky |
| FrSky (SmartPort) | Completa | Limitadas | Pulsación de Botón | Limitadas al ecosistema FrSky |
| iBUS | Básica | No | Pulsación de Botón | Limitadas |
| SBUS | Ninguna (separada) | No | Pulsación de Botón | Limitadas |
| DSMX | Básica | No | Pulsación de Botón | Limitadas (coincidencia de modelo) |
La brecha de características entre protocolos más nuevos como CRSF/ExpressLRS y estándares más antiguos es sustancial. La capacidad de actualizar el firmware por aire y acceder a telemetría completa ha transformado la forma en que interactúo con mis drones.
Eligiendo el Protocolo Correcto
Con tantas opciones, seleccionar el protocolo adecuado puede ser abrumador. Aquí está mi consejo práctico basado en diferentes escenarios de vuelo.
Para Carreras
Prioridad: Latencia mínima y rendimiento confiable en entornos de RF concurridos
- Mejor Opción: ExpressLRS a 500Hz o superior
- Alternativa: GHST a 250Hz
- Opción Económica: iBUS (si se usa equipo FlySky)
Para carreras, uso exclusivamente ExpressLRS a 500Hz. La combinación de latencia ultra baja y excelente resistencia a interferencias es inigualable, particularmente en entornos de carrera concurridos donde docenas de transmisores de video y enlaces de control operan simultáneamente.
Para Estilo Libre
Prioridad: Buen equilibrio de capacidad de respuesta y alcance
- Mejor Opción: ExpressLRS a 250Hz
- Alternativa: CRSF (Crossfire) a 150Hz
- Opción Económica: F.Port o SBUS con equipo FrSky
El vuelo estilo libre se beneficia de controles receptivos pero no requiere la latencia mínima absoluta de las carreras. He encontrado que ExpressLRS a 250Hz es el punto óptimo, ofreciendo una excelente sensación de los sticks mientras mantiene más que suficiente alcance para sesiones típicas de estilo libre.
Para Largo Alcance
Prioridad: Máximo alcance confiable con latencia aceptable
- Mejor Opción: ExpressLRS 900MHz a 25-50Hz
- Alternativa: TBS Crossfire 900MHz
- Opción Económica: FrSky R9 (con limitaciones)
Para mis construcciones dedicadas de largo alcance, ExpressLRS 900MHz a 25Hz ha demostrado ser imbatible. La combinación de un diseño de protocolo eficiente, modulación LoRa y baja tasa de paquetes permite un alcance extraordinario mientras se mantiene una capacidad de respuesta de control utilizable.
Para Principiantes
Prioridad: Simplicidad, confiabilidad y rendimiento adecuado
- Mejor Opción: ExpressLRS a 100Hz (con la orientación adecuada)
- Alternativa: SBUS o F.Port con equipos FrSky
- Opción Económica: iBUS con equipos FlySky
Si bien ExpressLRS ofrece el mejor rendimiento, sus opciones de configuración pueden abrumar a los principiantes. Si estás ayudando a un nuevo piloto, brinda asistencia de configuración con ExpressLRS o recomienda un sistema más simple como FrSky con SBUS, que ofrece un buen rendimiento con menos complejidad.
Para Vuelo Cinematográfico
Prioridad: Control suave y enlace confiable
- Mejor Opción: ExpressLRS a 100Hz o 50Hz
- Alternativa: CRSF (Crossfire) a 50Hz
- Opción Económica: SBUS o F.Port
El vuelo cinematográfico se beneficia de entradas de control suaves en lugar de una respuesta rápida. Las tasas de paquetes más bajas (50-100Hz) brindan más que suficiente capacidad de respuesta mientras maximizan el alcance y la confiabilidad. A menudo uso ExpressLRS a 50Hz para mis construcciones cinematográficas, ya que ofrece un excelente alcance con un control aún suave.
Solución de Problemas de Protocolo
Incluso con una implementación adecuada, pueden surgir problemas de protocolo RC. Así es como diagnostico y resuelvo problemas comunes.
Problemas Comunes y Soluciones
Conexión Intermitente
Síntomas: Failsafes aleatorios, fallas de control o pérdidas de telemetría
Posibles Causas y Soluciones:
- Interferencia:
- Aleje la antena del transmisor de video de la antena del receptor
- Proteja la placa de distribución de energía
- Use núcleos de ferrita en los cables de alimentación
- Problemas de Antena:
- Verifique si hay antenas dañadas
- Asegure la orientación adecuada de la antena
- Verifique que las conexiones de la antena estén seguras
- Problemas de Energía:
- Verifique que el receptor reciba 5V limpios
- Agregue un condensador a la entrada de energía
- Verifique las caídas de voltaje bajo carga
Una vez perseguí un problema de conexión intermitente durante semanas antes de descubrir que mi antena VTX estaba posicionada demasiado cerca de mi antena receptora. Moverlas solo 3 cm más lejos resolvió completamente el problema.
Sin Respuesta de Control
Síntomas: Transmisor conectado pero sin respuesta del dron
Posibles Causas y Soluciones:
- Desajuste de Protocolo:
- Verifique que el protocolo correcto esté seleccionado en el controlador de vuelo
- Verifique la configuración del módulo transmisor
- Configuración UART:
- Confirme que UART esté asignado correctamente a Serial RX
- Verifique que las conexiones TX/RX sean correctas
- Inversión de Señal:
- Verifique si la configuración de inversión coincide con los requisitos del protocolo
- Verifique el inversor de hardware si usa uno
- Mapeo de Canales:
- Asegúrese de que los canales estén mapeados correctamente
- Verifique problemas de orden AETR vs TAER
El problema de "sin respuesta" más común que encuentro es la asignación incorrecta de UART. Siempre verifique dos veces que el UART al que se ha conectado esté configurado correctamente para Serial RX en la pestaña de puertos.
Problemas de Telemetría
Síntomas: Sin datos de telemetría o telemetría intermitente
Posibles Causas y Soluciones:
- Conexión Faltante:
- Verifique la conexión bidireccional para los protocolos que la requieren
- Verifique que la almohadilla TX esté conectada para los protocolos de telemetría
- Problemas de Configuración:
- Habilite la telemetría en el transmisor
- Verifique la configuración de la relación de telemetría (para ExpressLRS)
- Desajuste de Software:
- Actualice el firmware en el transmisor y el receptor
- Asegure versiones compatibles
Para ExpressLRS, he descubierto que la relación de telemetría es crucial para datos confiables. Para vuelos de largo alcance, uso una relación conservadora de 1:128 para priorizar la estabilidad del enlace de control sobre la frecuencia de telemetría.
Dificultades de Vinculación
Síntomas: No se puede vincular el receptor al transmisor
Posibles Causas y Soluciones:
- Problemas Específicos del Protocolo:
- ExpressLRS: Verifique que las frases de vinculación y las versiones de firmware coincidan
- Crossfire: Use el script LUA para la vinculación
- FrSky: Verifique la compatibilidad de la versión EU/FCC
- Problemas de Hardware:
- Asegúrese de que el receptor esté alimentado correctamente durante la vinculación
- Intente el botón de vinculación física si está disponible
- Problemas de Distancia:
- Mantenga el transmisor y el receptor cerca durante la vinculación
- Elimine las posibles fuentes de interferencia
Los problemas de vinculación a menudo son específicos del protocolo. Con ExpressLRS, la mayoría de los problemas de vinculación que he encontrado se relacionan con versiones de firmware o frases de vinculación que no coinciden. Siempre verifique que estos coincidan exactamente entre el transmisor y el receptor.
Herramientas y Técnicas de Diagnóstico
Indicadores de Calidad de Señal del Receptor
La mayoría de los protocolos modernos proporcionan métricas de calidad de señal:
- RSSI (Indicador de Intensidad de Señal Recibida):
- Mide la intensidad general de la señal
- Generalmente se muestra como porcentaje
- Valores por debajo del 50% indican problemas potenciales
- LQ (Calidad de Enlace):
- Mide la tasa de éxito de paquetes
- Más útil que RSSI para sistemas digitales
- Valores por debajo del 70% justifican una investigación
- Modo RF:
- Indica el modo de operación actual (por ejemplo, ExpressLRS cambia entre 250Hz/50Hz según la señal)
- Ayuda a verificar que los sistemas dinámicos funcionen correctamente
Confío mucho en LQ para los sistemas ExpressLRS y Crossfire, ya que proporciona una indicación más significativa de la salud del enlace que RSSI. Monitorear las tendencias de LQ durante el vuelo puede proporcionar una advertencia temprana de posibles problemas.
Diagnósticos del Controlador de Vuelo
El controlador de vuelo puede proporcionar información de diagnóstico valiosa:
- Pestaña del Receptor:
- Verifique que los movimientos de los canales coincidan con las entradas de los sticks
- Verifique el recorte de señal o valores anormales
- Confirme que el mapeo de canales sea correcto
- Comandos CLI:
status- Muestra el proveedor de RX serie activorxrange- Muestra los rangos de los canalesset serialrx_- Enumera la configuración actual de RX serie
- Registro de Blackbox:
- Analice los datos de comandos RC en busca de fallas o inconsistencias
- Compare los datos RC con la respuesta del giroscopio para la evaluación de latencia
Cuando soluciono problemas de control sutiles, a menudo uso registros de Blackbox para analizar los datos de comandos RC. Esto me ha ayudado a identificar y resolver problemas como la configuración incorrecta del suavizado de RC que no eran evidentes de inmediato durante el vuelo.
El futuro de los protocolos de RC
El panorama de los protocolos de RC continúa evolucionando rápidamente. Estas son las tendencias y desarrollos que estoy observando de cerca.
Tendencias actuales
- Aumento de las tasas de actualización: La presión por una menor latencia continúa, con 1000Hz ahora disponibles y potencialmente tasas más altas en el futuro.
- Desarrollo de código abierto: Proyectos impulsados por la comunidad como ExpressLRS están innovando más rápido que los sistemas propietarios.
- Agilidad de frecuencia: Los sistemas que pueden operar en múltiples bandas (2.4GHz, 900MHz, 868MHz) brindan flexibilidad para diferentes regiones y aplicaciones.
- Integración con FPV digital: Integración más estrecha entre los sistemas de control y video, potencialmente compartiendo antenas o bandas de frecuencia.
- Expansión de telemetría: Datos de telemetría más completos, incluidas estadísticas de enlace de video y parámetros de vuelo avanzados.
Tecnologías emergentes
Varias tecnologías prometedoras están en el horizonte que podrían transformar aún más los protocolos de RC:
- Procesamiento de señales mejorado por IA: Algoritmos de aprendizaje automático que se adaptan a entornos de RF en tiempo real.
- Redes en malla: Redes distribuidas donde múltiples drones pueden retransmitir señales, extendiendo el rango efectivo.
- Radio cognitiva: Sistemas que detectan automáticamente los canales disponibles y cambian los parámetros de transmisión en consecuencia.
- Encriptación resistente a la computación cuántica: A medida que avanza la computación cuántica, se necesitarán nuevas medidas de seguridad para aplicaciones críticas.
- Radio definida por software (SDR): Sistemas de radio más flexibles que pueden reconfigurarse mediante actualizaciones de software.
Preguntas frecuentes sobre protocolos de RC
Preguntas generales sobre protocolos
¿Los diferentes protocolos afectan la duración de la batería?
Sí, pero mínimamente en el lado del dron. Las tasas de paquetes más altas consumen un poco más de energía en el receptor, pero la diferencia es insignificante en comparación con el consumo de energía del motor. En el lado del transmisor, el efecto puede ser más notable, con sistemas de alta potencia y alta tasa de paquetes que agotan las baterías más rápidamente.
¿Puedo usar múltiples protocolos en el mismo dron?
Si bien es técnicamente posible (por ejemplo, control a través de un protocolo y telemetría a través de otro), generalmente no se recomienda debido a la complejidad adicional y la posible interferencia. Los protocolos integrados modernos eliminan la necesidad de este enfoque.
¿Cómo afectan los protocolos a la transmisión de video?
Son sistemas separados, pero pueden afectarse entre sí a través de interferencias. Algunos sistemas avanzados como DJI O3 y Walksnail están comenzando a integrar la transmisión de control y video para una mejor coordinación y reducción de interferencias.
¿Existen restricciones legales en los protocolos de RC?
Sí, el uso de frecuencias y la potencia de salida están regulados de manera diferente en varios países. Siempre verifique las regulaciones locales, particularmente para los sistemas de 900MHz que tienen diferentes asignaciones de frecuencia en todo el mundo (868MHz en la UE, 915MHz en los EE. UU.).
Preguntas técnicas sobre protocolos
¿Cuál es la diferencia entre RSSI y LQ?
RSSI (Indicador de intensidad de señal recibida) mide la potencia de señal bruta, mientras que LQ (Calidad de enlace) mide el porcentaje de paquetes recibidos con éxito. LQ es generalmente más útil para sistemas digitales, ya que indica directamente la confiabilidad de la comunicación.
¿Cómo afecta la tasa de paquetes a la latencia y el alcance?
Las tasas de paquetes más altas reducen la latencia pero típicamente disminuyen el alcance debido a menos tiempo para la corrección de errores y menor energía por paquete. Es por eso que los vuelos de largo alcance usan tasas de paquetes más bajas (25-50Hz) mientras que las carreras usan tasas más altas (500Hz+).
¿Qué causa los failsafes incluso con buen RSSI/LQ?
Varios factores pueden causar esto: interferencia en frecuencias específicas, bloqueo momentáneo de la señal, problemas de hardware del receptor o problemas de suministro de energía. Un buen RSSI no garantiza que todos los paquetes se reciban correctamente.
¿Puedo mejorar el rendimiento del protocolo con mejores antenas?
Absolutamente. La calidad, el tipo y la ubicación de la antena pueden afectar drásticamente el alcance y la confiabilidad. Para aplicaciones críticas, el uso de sistemas de diversidad con múltiples antenas en diferentes orientaciones proporciona el mejor rendimiento.
Preguntas sobre selección de protocolos
¿Es ExpressLRS realmente mucho mejor que otros protocolos?
Para la mayoría de las métricas (latencia, alcance, flexibilidad), sí. La naturaleza de código abierto ha permitido un desarrollo y optimización rápidos. Sin embargo, otros protocolos pueden ofrecer ventajas en áreas específicas como la integración del ecosistema o la simplicidad.
¿Debo elegir 2.4GHz o 900MHz para largo alcance?
900MHz generalmente proporciona una mejor penetración y alcance debido a la frecuencia más baja, pero los sistemas de 2.4GHz aún pueden lograr un alcance impresionante con configuraciones optimizadas. Si la máxima prioridad es el alcance y 900MHz es legal en su región, generalmente es la mejor opción.
¿Qué protocolo tiene la mejor resistencia a las interferencias?
ExpressLRS y TBS Crossfire sobresalen aquí, con sofisticados saltos de frecuencia y corrección de errores. ExpressLRS a tasas de paquetes más altas (250Hz+) es particularmente bueno en entornos de RF concurridos como eventos de carreras.
¿Vale la pena actualizar de SBUS a un protocolo más nuevo?
Para la mayoría de los pilotos, sí. Las mejoras en latencia, integración de telemetría y confiabilidad son notables. Las mayores ganancias se obtienen al actualizar tanto el sistema de RF (por ejemplo, a ExpressLRS) como el protocolo entre el receptor y el controlador de vuelo (por ejemplo, a CRSF).
Conclusión
Los protocolos de RC han evolucionado dramáticamente desde los simples sistemas analógicos del pasado hasta las sofisticadas comunicaciones digitales de hoy. Comprender estos protocolos es crucial para optimizar el rendimiento y la confiabilidad de su dron.
El panorama actual está dominado por protocolos en serie como SBUS para sistemas tradicionales, CRSF para aplicaciones de alto rendimiento y protocolos especializados como GHST e iBUS para ecosistemas específicos. Mientras tanto, los sistemas de RF que implementan estos protocolos continúan avanzando, con ExpressLRS estableciendo nuevos estándares de rendimiento y valor.
Al seleccionar un protocolo, considere sus necesidades específicas:
- Para carreras, priorice la latencia mínima con ExpressLRS a altas tasas de paquetes
- Para estilo libre, equilibre la capacidad de respuesta y el alcance con tasas de paquetes moderadas
- Para largo alcance, concéntrese en la confiabilidad y la penetración con sistemas de 900MHz
- Para principiantes, elija sistemas con buena documentación y soporte de la comunidad
Recuerde que la implementación adecuada es tan importante como la selección del protocolo. La ubicación de la antena, la configuración y el mantenimiento regular juegan un papel crucial para lograr un rendimiento óptimo.
A medida que la tecnología continúa avanzando, podemos esperar capacidades aún más impresionantes de los futuros protocolos de RC. La tendencia hacia el desarrollo de código abierto, las tasas de actualización más altas y una integración más estrecha con otros sistemas promete un futuro emocionante para los sistemas de control de drones.


