Übersicht über Drohnen-RC-Protokolle

Funksteuerungsprotokolle sind die digitalen Sprachen, die es Ihrem Sender ermöglichen, mit Ihrer Drohne zu kommunizieren. Nach jahrelangem Testen verschiedener RC-Systeme unter unterschiedlichen Flugbedingungen habe ich gelernt, dass das Verständnis dieser Protokolle entscheidend für die Optimierung von Leistung und Zuverlässigkeit ist. Dieser umfassende Leitfaden untersucht die wichtigsten heute verfügbaren RC-Protokolle und ihre technischen Eigenschaften, wobei der Schwerpunkt speziell auf den Kommunikationsstandards und nicht auf den Hardware-Ökosystemen liegt, die sie implementieren.
Einführung in RC-Protokolle
Wenn wir über Funkfernsteuerungssysteme für Drohnen sprechen, konzentrieren wir uns oft auf die physischen Sender und Empfänger. Es ist jedoch das zugrunde liegende Protokoll - der Kommunikationsstandard, der definiert, wie Daten verpackt, übertragen und interpretiert werden - das die Leistung wirklich bestimmt. Betrachten Sie Protokolle als verschiedene Sprachen: Während alle die Kommunikation ermöglichen, sind einige in bestimmten Situationen effizienter, präziser oder robuster als andere.
Ich erinnere mich noch gut an meine Anfangszeit des Fliegens mit einfachen PWM-Empfängern, bei denen jeder Kanal eine separate Leitung benötigte und Signalstörungen ein ständiges Problem darstellten. Die Entwicklung hin zu modernen digitalen Protokollen hat die Zuverlässigkeit und Fähigkeiten von RC-Systemen grundlegend verändert und Funktionen ermöglicht, die früher undenkbar waren.
Die Evolution der RC-Protokolle
Die RC-Kommunikation hat sich im Laufe der Jahrzehnte dramatisch weiterentwickelt:
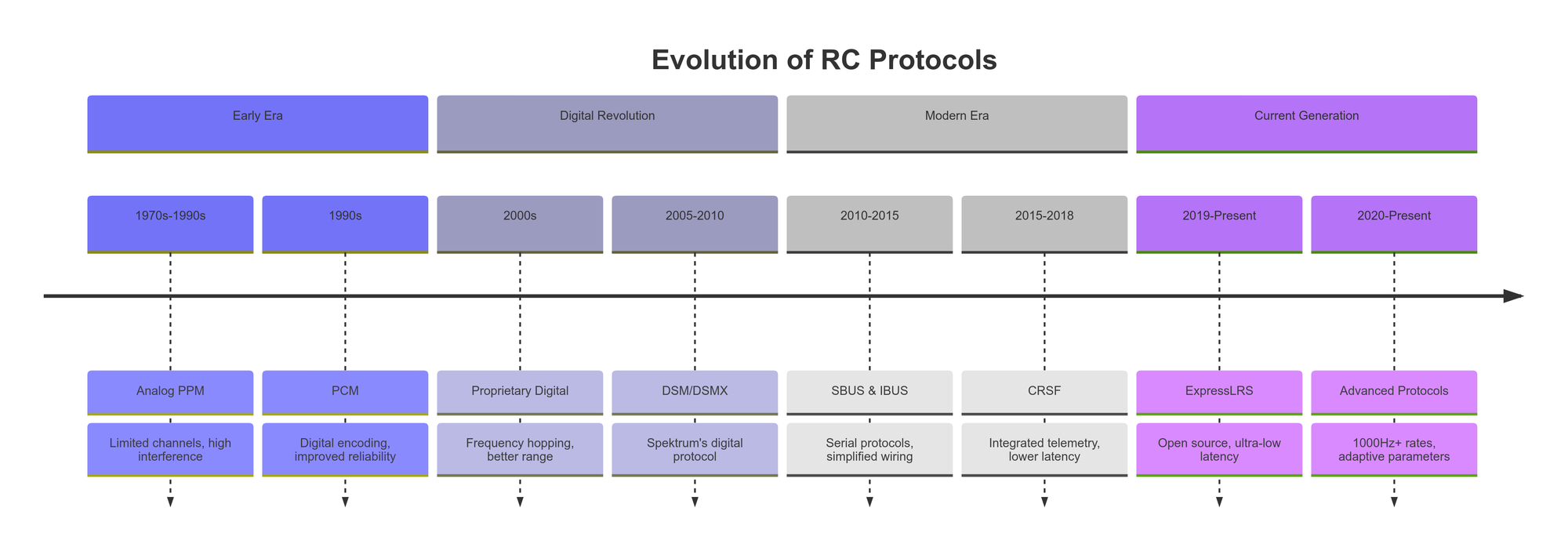
- Anfangszeit (1970er-1990er): Einfache analoge PPM (Pulse Position Modulation) mit begrenzten Kanälen und Anfälligkeit für Störungen.
- Digitale Revolution (2000er): Einführung von PCM (Pulse Code Modulation) und frühen proprietären digitalen Protokollen mit verbesserter Zuverlässigkeit und Funktionen. Das war ein Wendepunkt - plötzlich wurden Ausfälle in der Luft viel seltener.
- Moderne Ära (2010er): Entwicklung ausgefeilter serieller Protokolle wie SBUS, CRSF und iBUS, die mehrere Kanäle, Telemetrie und erweiterte Funktionen bieten.
- Aktuelle Generation (2020er): Fortschrittliche Protokolle, die die Grenzen der Leistung mit noch nie dagewesenen Aktualisierungsraten und Reichweiten verschieben. Die technischen Verbesserungen im Protokolldesign haben Leistungen ermöglicht, die mit Verbrauchergeräten vor wenigen Jahren noch nicht möglich waren.
Warum Protokolle wichtig sind
Das von Ihnen gewählte Protokoll beeinflusst mehrere kritische Aspekte Ihres Flugerlebnisses:
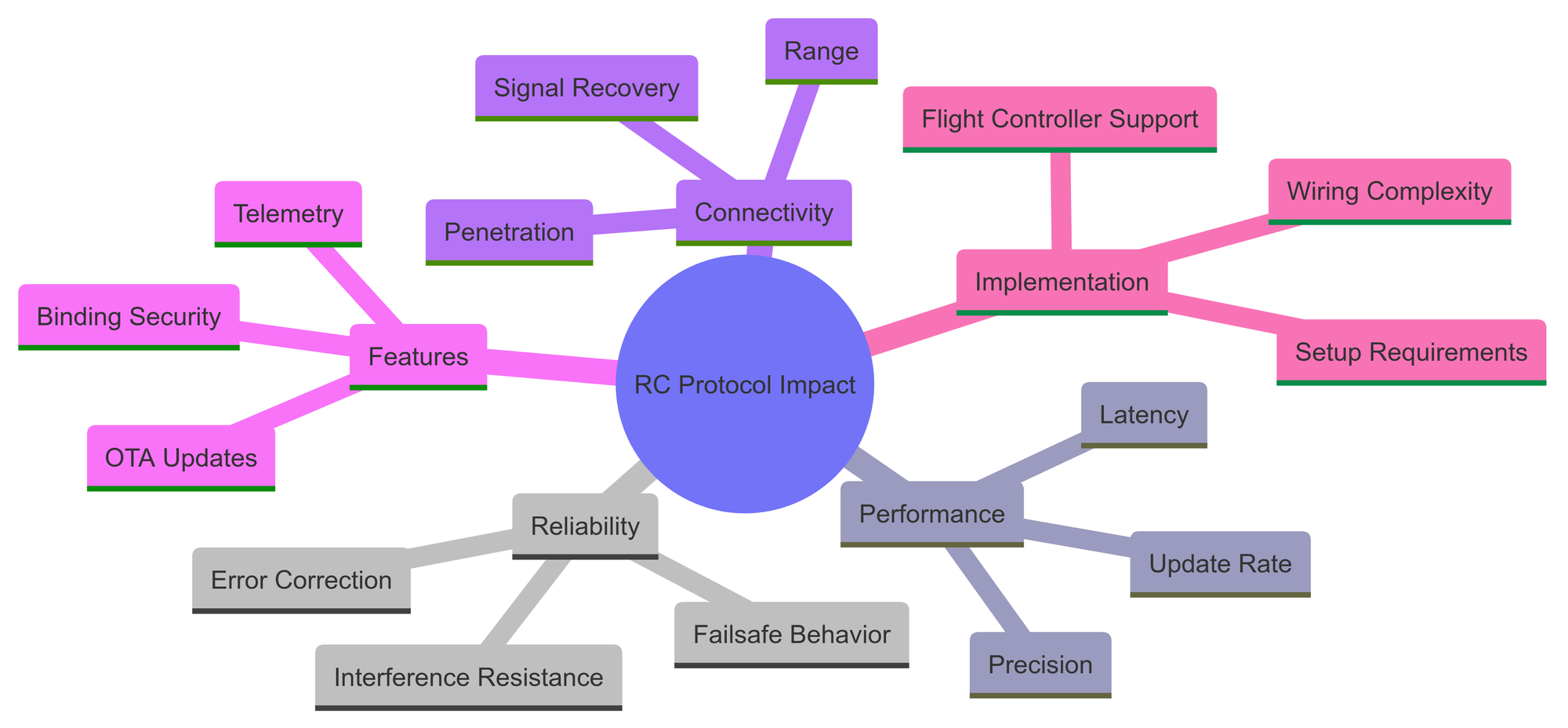
- Latenz: Wie schnell Ihre Stickbewegungen in die Reaktion der Drohne umgesetzt werden
- Reichweite: Wie weit Sie fliegen können, während Sie die zuverlässige Kontrolle beibehalten
- Zuverlässigkeit: Wie widerstandsfähig die Verbindung gegen Störungen und Signalverlust ist
- Funktionen: Welche zusätzlichen Fähigkeiten verfügbar sind (Telemetrie, Over-the-Air-Updates usw.)
- Hardware-Anforderungen: Welche Ausrüstung zur Verwendung des Protokolls erforderlich ist
Ich habe selbst erlebt, wie der Wechsel des Protokolls die Leistung einer Drohne verändern kann. Das richtige Protokoll kann den Unterschied zwischen einer Drohne ausmachen, die sich träge und unempfindlich anfühlt, und einer, die sich wie eine Erweiterung Ihrer Gedanken anfühlt.
Grundlagen der Protokolle verstehen
Bevor wir uns mit spezifischen Protokollen befassen, ist es wichtig, die technischen Konzepte zu verstehen, die sie unterscheiden.
Wichtige technische Konzepte
Signalmodulation
Wie Informationen auf die Trägerwelle codiert werden:

- Frequency Hopping Spread Spectrum (FHSS): Wechselt schnell die Frequenzen nach einem vorgegebenen Muster und verbessert so die Widerstandsfähigkeit gegen Störungen. Die meisten modernen Protokolle verwenden eine Form von FHSS.
- Direct Sequence Spread Spectrum (DSSS): Verteilt das Signal über eine große Bandbreite und macht es so resistent gegen Schmalbandstörungen. In Drohnenanwendungen weniger verbreitet.
- Adaptive Frequency Agility: Fortschrittliche Systeme, die aktiv Störungen erkennen und vermeiden, indem sie die Frequenzmuster ändern. Ich habe festgestellt, dass diese beim Fliegen in städtischen Umgebungen mit unvorhersehbarem HF-Rauschen besonders wertvoll sind.
Datenraten und Paketstruktur
Wie Informationen verpackt und übertragen werden:
| Konzept | Beschreibung | Auswirkung auf die Leistung |
|---|---|---|
| Paketrate | Anzahl der pro Sekunde gesendeten Datenpakete (Hz) | Höhere Raten = geringere Latenz, aber reduzierte Reichweite |
| Paketgröße | Menge der Informationen in jeder Übertragung | Größere Pakete = mehr Daten, aber längere Übertragungszeit |
| Fehlerkorrektur | Methoden zur Erkennung und Behebung von Fehlern | Robustere Korrektur = bessere Zuverlässigkeit, aber erhöhte Latenz |
| Kanalauflösung | Genauigkeit der Steuerungswerte (Bits) | Höhere Auflösung = präzisere Steuerung, aber größere Pakete |
| Framing | Wie Pakete strukturiert und identifiziert werden | Effizientes Framing = geringerer Overhead und bessere Leistung |
Ich habe ausgiebig mit verschiedenen Paketraten experimentiert und festgestellt, dass die optimale Einstellung je nach Flugstil stark variiert. Für Rennen bevorzuge ich 500 Hz oder höher für minimale Latenz, während für Langstreckenflüge 50 Hz oder weniger eine bessere Reichweite bei immer noch akzeptabler Reaktionsfähigkeit bieten.
Link-Budget
Die Gesamtleistungsbilanz der Funkverbindung:

Das Verständnis des Link-Budgets war für meine Langstrecken-Builds entscheidend. Ich habe gelernt, dass eine Verdoppelung der Sendeleistung viel weniger Reichweite bringt als die Optimierung der Antennen oder die Verbesserung der Empfängerempfindlichkeit.
Protokoll vs. HF-System vs. Physikalische Verbindung
Es ist wichtig, zwischen verwandten, aber unterschiedlichen Konzepten zu unterscheiden:
| Konzept | Beschreibung | Beispiele |
|---|---|---|
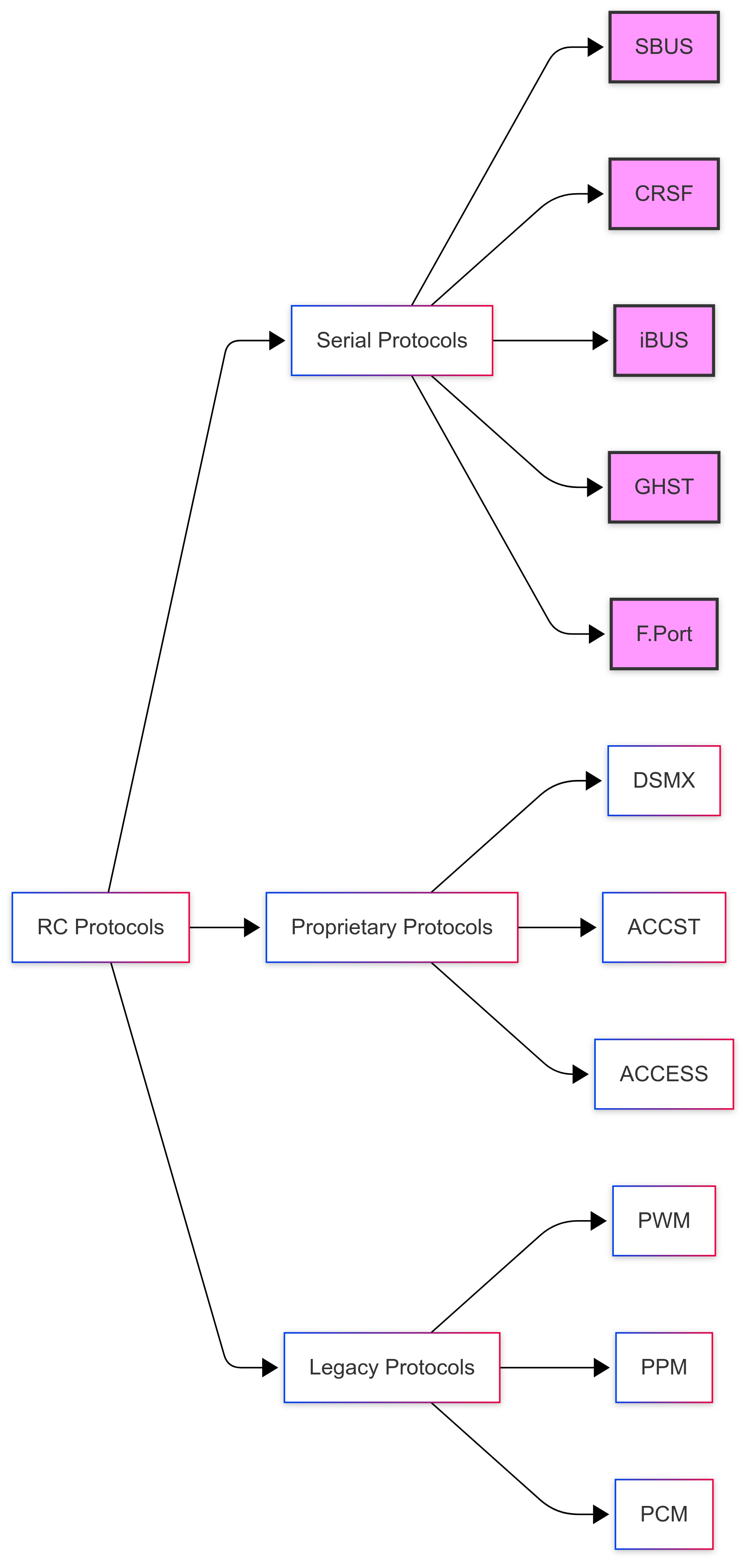
| Protokoll | Kommunikationsstandard, der definiert, wie Daten strukturiert sind | CRSF, SBUS, iBUS, GHST |
| HF-System | Hochfrequenztechnologie zur Übertragung des Signals | ExpressLRS, Crossfire, ACCST, DSMX |
| Physikalische Verbindung | Wie der Empfänger mit dem Flugcontroller verbunden ist | UART, PWM, I2C, SPI |
Diese Unterscheidung ist wichtig, da dasselbe Protokoll (z.B. CRSF) von verschiedenen HF-Systemen (z.B. TBS Crossfire und ExpressLRS) verwendet werden kann und dasselbe HF-System manchmal mehrere Protokolle unterstützen kann.
Wichtige RC-Protokolle
Lassen Sie uns die wichtigsten Protokolle in der Drohnenwelt untersuchen, basierend auf meinen umfangreichen Tests und Erfahrungen aus der Praxis.
Übersicht über den Protokollvergleich
SBUS (Serial Bus)
SBUS wurde von Futaba entwickelt, von FrSky und anderen weithin übernommen und ist seit vielen Jahren ein Standard.
Technische Merkmale
- Datenrate: 100.000 bps
- Aktualisierungsrate: Typischerweise 9ms (111Hz)
- Kanäle: Bis zu 16 proportionale + 2 digitale
- Latenz: ~14ms Ende-zu-Ende (typisch)
- Signaltyp: Invertiertes UART-Seriell
- Telemetrie: Nicht in SBUS selbst enthalten (erfordert separate Verbindung)
Stärken
- Weit verbreitete Kompatibilität: Wird von praktisch allen Flugcontrollern unterstützt
- Einfachheit: Einadrige Verbindung zum Flugcontroller
- Zuverlässigkeit: Bewährte Erfolgsbilanz in unzähligen Builds
Einschränkungen
- Signalinvertierung: Erfordert Inverter für F1/F3-Flugcontroller (F4 und neuer haben eingebaute Inverter)
- Mäßige Latenz: Nicht so reaktionsschnell wie neuere Protokolle
- Keine integrierte Telemetrie: Erfordert separate Verbindung für Telemetriedaten
Ich habe SBUS im Laufe der Jahre in Dutzenden von Builds verwendet, und es bleibt eine solide, zuverlässige Wahl. Ich schätze besonders seine universelle Kompatibilität - ich habe noch nie einen Flugcontroller erlebt, der SBUS nicht verwenden konnte.
CRSF (Crossfire RF)
CRSF wurde von Team BlackSheep für ihr Crossfire-System entwickelt, später von ExpressLRS übernommen und ist zum Goldstandard für Hochleistungs-RC-Links geworden.
Technische Merkmale
- Datenrate: 420.000 bps
- Aktualisierungsrate: Variabel von 50Hz bis 1000Hz (je nach Implementierung)
- Kanäle: Bis zu 12 Kanäle
- Latenz: So niedrig wie 2ms (bei 1000Hz)
- Signaltyp: Nicht-invertiertes UART-Seriell
- Telemetrie: Integrierte bidirektionale Kommunikation
Stärken
- Niedrige Latenz: Extrem reaktionsschnelle Steuerung
- Integrierte Telemetrie: Umfassendes Daten-Feedback in derselben Verbindung
- Erweiterte Funktionen: Unterstützung für LUA-Skripte, Over-the-Air-Updates, Modell-Matching
- Flexible Implementierung: Wird von mehreren HF-Systemen mit unterschiedlichen Eigenschaften verwendet
Einschränkungen
- Komplexität: Mehr Einstellungsoptionen können für Anfänger überwältigend sein
- Hardware-Anforderungen: Benötigt Flugcontroller mit verfügbarem UART
- Implementierungsvariationen: Verschiedene Systeme, die CRSF verwenden, können unterschiedliche Fähigkeiten haben
CRSF ist seit 2018 mein bevorzugtes Protokoll für ernsthafte Builds. Die Kombination aus niedriger Latenz, integrierter Telemetrie und erweiterten Funktionen ist schwer zu schlagen. Das Design des Protokolls ermöglicht eine hervorragende Leistung über ein breites Anwendungsspektrum.
iBUS
iBUS wurde von FlySky entwickelt und bietet ein unkompliziertes serielles Protokoll mit integrierter Telemetrie.
Technische Merkmale
- Datenrate: 115.200 bps
- Aktualisierungsrate: Typischerweise 8ms (125Hz)
- Kanäle: Bis zu 14 Kanäle
- Latenz: ~12ms Ende-zu-Ende (typisch)
- Signaltyp: Nicht-invertiertes UART-Seriell
- Telemetrie: Integrierte bidirektionale Kommunikation
Stärken
- Keine Signalinvertierung: Funktioniert direkt mit allen Flugcontrollern
- Integrierte Telemetrie: Einadrige Lösung für Steuerung und Daten
- Einfachheit: Unkompliziertes Setup mit minimaler Konfiguration
Einschränkungen
- Begrenztes Ökosystem: Wird hauptsächlich mit FlySky-Equipment verwendet
- Weniger erweiterte Funktionen: Im Vergleich zu CRSF oder GHST
- Weniger verbreitet: Weniger Community-Support und Entwicklung
Ich habe iBUS in mehreren Budget-Builds verwendet, und es leistet für den Preis beachtliche Arbeit. Das nicht-invertierte Signal ist besonders praktisch, wenn man mit älteren Flugcontrollern arbeitet, da es die Notwendigkeit von Signalinvertern eliminiert, die SBUS erfordert.
GHST (Ghost)
GHST wurde von ImmersionRC für ihr Ghost-System entwickelt und bietet eine hervorragende Balance der Leistungsmerkmale.
Technische Eigenschaften
- Datenrate: 420.000 bps
- Aktualisierungsrate: Variabel von 50Hz bis 250Hz
- Kanäle: Bis zu 12 Kanäle
- Latenz: So niedrig wie 5ms
- Signaltyp: Nicht-invertiertes UART-Seriell
- Telemetrie: Integrierte bidirektionale Kommunikation
Stärken
- Sehr niedrige Latenz: Hervorragende Reaktionsfähigkeit
- Gute Reichweite: Überdurchschnittliche Distanzfähigkeiten
- Saubere Implementierung: Gut gestaltetes Protokoll mit effizienter Bandbreitennutzung
- Offene Dokumentation: Transparente Protokollspezifikationen
Einschränkungen
- Begrenzte Verbreitung: Nicht so weit verbreitet wie CRSF oder SBUS
- Weniger Hardwareoptionen: Begrenzte Auswahl an kompatiblen Geräten
- Weniger Community-Entwicklung: Kleineres Ökosystem von Tools und Ressourcen
Ich habe GHST ausgiebig getestet und war von der technischen Umsetzung beeindruckt. Das Protokoll erreicht eine hervorragende Balance zwischen Latenz und Reichweite, obwohl es nicht den Marktanteil einiger Wettbewerber erreicht hat.
DSMX
DSMX wurde von Spektrum entwickelt und ist in den USA und in flugfertigen Modellen weit verbreitet.
Technische Eigenschaften
- Datenrate: Proprietär
- Aktualisierungsrate: 11ms (91Hz) oder 22ms (45Hz)
- Kanäle: Bis zu 12 Kanäle
- Latenz: ~14ms (11ms Framerate) oder ~25ms (22ms Framerate)
- Signaltyp: Proprietäres Seriell
- Telemetrie: In den meisten Implementierungen begrenzt
Stärken
- Weit verbreitet in RTF-Modellen: Häufig in flugfertigen Drohnen
- Starke Marktpräsenz in den USA: Gut unterstützt in Nordamerika
- Einfachheit der Bindung: Einfacher Empfängerbindungsprozess
Einschränkungen
- Geschlossenes Ökosystem: Proprietäres Protokoll mit begrenzter Unterstützung durch Drittanbieter
- Höhere Latenz: Nicht so reaktionsschnell wie neuere Protokolle
- Begrenzte Telemetrie: Im Vergleich zu CRSF oder GHST einfach
Obwohl ich DSMX nicht so ausgiebig wie andere Protokolle verwendet habe, habe ich mit mehreren Spektrum-ausgestatteten Drohnen gearbeitet. Das Protokoll ist zuverlässig, fühlt sich aber im Vergleich zu neueren Alternativen veraltet an, insbesondere in Bezug auf Latenz und Funktionsumfang.
F.Port
F.Port wurde von FrSky entwickelt und kombiniert SBUS-Steuerung und SmartPort-Telemetrie in einer einzigen Verbindung.
Technische Eigenschaften
- Datenrate: 115.200 bps
- Aktualisierungsrate: Typischerweise 9ms (111Hz)
- Kanäle: Bis zu 16 proportionale + 2 digitale
- Latenz: ~14ms Ende-zu-Ende (typisch)
- Signaltyp: Halbduplex-UART
- Telemetrie: Integrierte bidirektionale Kommunikation
Stärken
- Einzel-Draht-Lösung: Kombiniert Steuerung und Telemetrie
- Kompatibilität: Funktioniert mit bestehendem FrSky-Ökosystem
- Ressourceneffizienz: Gibt UART-Ports auf dem Flugcontroller frei
Einschränkungen
- FrSky-spezifisch: Beschränkt auf FrSky-Ausrüstung
- Setup-Komplexität: Kann schwierig zu konfigurieren sein
- Abnehmende Popularität: Wird von neueren Protokollen abgelöst
Ich habe mehrere meiner FrSky-Aufbauten von separatem SBUS/SmartPort auf F.Port umgestellt. Die Einzel-Draht-Lösung ist elegant, obwohl ich das Setup kniffliger fand als erwartet, oft waren Firmware-Updates sowohl für Empfänger als auch Sender erforderlich.
FrSky-Protokolle
FrSky hat mehrere Protokolle entwickelt, die aufgrund ihrer weiten Verbreitung in der Drohnen-Community eine besondere Erwähnung verdienen.
ACCST (Advanced Continuous Channel Shifting Technology)
FrSkys ursprüngliches digitales Protokoll, das eine weite Verbreitung fand:
- Datenrate: Variabel
- Aktualisierungsrate: Typischerweise 9ms (111Hz)
- Kanäle: Bis zu 16 Kanäle (D16-Modus)
- Latenz: ~14ms Ende-zu-Ende (typisch)
- Signaltyp: 2,4GHz FHSS
- Telemetrie: Verfügbar über separate SmartPort-Verbindung
Varianten:
- D8: 8-Kanal-Modus, kompatibel mit älteren Empfängern
- D16: 16-Kanal-Modus mit erweiterten Funktionen
- LR12: Langstrecken-Variante mit reduzierten Kanälen
Ich habe ACCST D16 jahrelang verwendet und fand es als zuverlässiges Protokoll für das tägliche Fliegen. Obwohl es nicht so fortschrittlich wie neuere Optionen ist, bot es eine konsistente Leistung und gute Kompatibilität mit einer Vielzahl von Flugcontrollern.
ACCESS (Advanced Communication Control, Elevated Spread Spectrum)
FrSkys neueres Protokoll, das 2019 als Ersatz für ACCST eingeführt wurde:
- Datenrate: Höher als ACCST
- Aktualisierungsrate: Typischerweise 9ms (111Hz)
- Kanäle: Bis zu 24 Kanäle
- Latenz: ~12-14ms Ende-zu-Ende (typisch)
- Signaltyp: 2,4GHz FHSS mit verbesserter Sicherheit
- Telemetrie: Integriert mit höherer Bandbreite
Hauptmerkmale:
- Verbesserte Sicherheit: Verwendet eindeutige ID-Bindung, um unbefugte Verbindungen zu verhindern
- Over-the-Air-Updates: Möglichkeit, die Empfänger-Firmware vom Sender aus zu aktualisieren
- Spektralanalyse: Eingebauter Frequenz-Scan zur Vermeidung von Interferenzen
- Smart Match: Vereinfachter Bindungsprozess mit Empfängerregistrierung
Meine Erfahrungen mit ACCESS waren gemischt. Während die verbesserten Sicherheitsfunktionen und OTA-Updates wertvoll sind, war der Übergang von ACCST aufgrund von Kompatibilitätsproblemen verwirrend. Bei richtiger Einrichtung funktioniert ACCESS in Bezug auf Reichweite und Zuverlässigkeit etwas besser als ACCST, aber die Unterschiede sind für typische Flugszenarien nicht dramatisch.
Legacy-Protokolle
Obwohl sie in modernen Drohnen weniger verbreitet sind, lohnt es sich, diese Protokolle für den historischen Kontext zu verstehen:
PWM (Pulsweitenmodulation)
- Eigenschaften: Ein Kabel pro Kanal, direkte Servosteuerung
- Einschränkungen: Sperrige Verkabelung, begrenzte Kanäle, anfällig für Störungen
- Aktuelle Verwendung: Selten in modernen Drohnen verwendet, außer für direkte Servoverbindungen
PPM (Pulspositionsmodulation)
- Eigenschaften: Mehrere Kanäle auf einem einzigen Kabel, analoges Signal
- Einschränkungen: Begrenzte Kanäle (typischerweise 8), mäßige Latenz
- Aktuelle Verwendung: Gelegentlich in einfachen oder älteren Geräten zu finden
PCM (Pulscodemodulation)
- Eigenschaften: Digitale Codierung von Steuersignalen
- Vorteile: Bessere Fehlererkennung als PPM
- Aktuelle Verwendung: Weitgehend von neueren digitalen Protokollen abgelöst
Vergleich der Protokollleistung
Nach umfangreichen Tests unter verschiedenen Bedingungen, so schneiden die wichtigsten Protokolle in den wichtigsten Leistungsmetriken ab.
Latenzvergleich
Gemessen von der Stickbewegung bis zur Reaktion des Flugcontrollers:
| Protokoll | Minimale Latenz | Typische Latenz | Anmerkungen |
|---|---|---|---|
| ExpressLRS | 2ms | 4-10ms | Variiert mit Paketrate (1000Hz-50Hz) |
| GHST | 5ms | 7-12ms | Variiert mit Paketrate (250Hz-50Hz) |
| CRSF (Crossfire) | 6ms | 10-15ms | Variiert mit Paketrate (150Hz-50Hz) |
| iBUS | 10ms | 12-15ms | Relativ konsistent |
| F.Port | 12ms | 14-16ms | Ähnlich wie SBUS |
| SBUS | 12ms | 14-16ms | Relativ konsistent |
| DSMX | 14ms | 14-25ms | Hängt von der Bildrate-Einstellung ab |
Meiner Erfahrung nach werden Latenzunterschiede ab etwa 5ms spürbar. Das Fliegen mit ExpressLRS bei 500Hz fühlt sich spürbar reaktionsschneller an als mit SBUS, insbesondere bei schnellen Manövern und Korrekturen.
Reichweitenvergleich
Basierend auf meinen Tests mit vergleichbarer Ausgangsleistung (100mW) und Standardantennen:
| Protokoll | Typische Reichweite | Maximale Reichweite | Anmerkungen |
|---|---|---|---|
| ExpressLRS 2.4GHz (50Hz) | 5-10km | 30km+ | Außergewöhnliches Reichweite-Latenz-Verhältnis |
| TBS Crossfire 900MHz | 5-10km | 40km+ | Industriestandard für große Reichweite |
| ExpressLRS 900MHz (25Hz) | 10-20km | 50km+ | Aktueller Reichweitenmeister |
| GHST 2.4GHz | 3-5km | 10km+ | Gute Balance zwischen Reichweite und Latenz |
| FrSky R9 900MHz | 3-5km | 15km+ | Gute Reichweite, aber weniger zuverlässig als neuere Systeme |
| FrSky ACCST 2.4GHz | 1-2km | 5km | Ausreichend für die meisten Flüge |
| FlySky AFHDS 2A | 0.5-1.5km | 3km | Begrenzt, aber ausreichend für Sichtflüge |
| DSMX | 1-2km | 3km | Ausreichend für die meisten Flüge |
Diese Reichweiten setzen optimale Bedingungen mit klarer Sichtverbindung voraus. Die tatsächliche Reichweite wird durch Hindernisse, Störungen, Antennenpositionierung und andere Faktoren beeinflusst.
Zuverlässigkeitsvergleich
Basierend auf meinen Erfahrungen beim Fliegen in verschiedenen Umgebungen:
| Protokoll | Störfestigkeit | Failsafe-Zuverlässigkeit | Gesamtrobustheit |
|---|---|---|---|
| ExpressLRS | Hervorragend | Hervorragend | Hervorragend |
| TBS Crossfire | Hervorragend | Hervorragend | Hervorragend |
| GHST | Sehr gut | Sehr gut | Sehr gut |
| FrSky R9 | Gut | Gut | Gut |
| F.Port | Gut | Gut | Gut |
| SBUS | Gut | Gut | Gut |
| iBUS | Gut | Gut | Gut |
| DSMX | Gut | Gut | Gut |
| FrSky ACCST | Befriedigend | Gut | Befriedigend |
| FlySky AFHDS 2A | Befriedigend | Befriedigend | Befriedigend |
Ich habe festgestellt, dass ExpressLRS und Crossfire selbst in anspruchsvollen HF-Umgebungen außergewöhnlich zuverlässig sind. Bei einem denkwürdigen Flug in der Nähe eines Funkturms behielt meine ExpressLRS-Verbindung eine solide Verbindung, während das ACCST-System eines Freundes mehrere Failsafes erlebte.
Funktionsvergleich
| Protokoll | Telemetrie | OTA-Updates | Bindungsmethode | Erweiterte Funktionen |
|---|---|---|---|---|
| CRSF | Umfassend | Ja | Variabel | Umfangreich (LUA-Skripte, Modellabgleich, dynamische Leistung) |
| ExpressLRS | Konfigurierbar | Ja | Bindungsphrase | Umfangreich (dynamische Leistung, WiFi-Updates) |
| GHST | Umfassend | Ja | Tastendruck | Gut (Modellabgleich, dynamische Leistung) |
| F.Port | Umfassend | Begrenzt | Tastendruck | Begrenzt auf FrSky-Ökosystem |
| FrSky (SmartPort) | Umfassend | Begrenzt | Tastendruck | Begrenzt auf FrSky-Ökosystem |
| iBUS | Grundlegend | Nein | Tastendruck | Begrenzt |
| SBUS | Keine (separat) | Nein | Tastendruck | Begrenzt |
| DSMX | Grundlegend | Nein | Tastendruck | Begrenzt (Modellabgleich) |
Der Funktionsunterschied zwischen neueren Protokollen wie CRSF/ExpressLRS und älteren Standards ist erheblich. Die Möglichkeit, die Firmware drahtlos zu aktualisieren und auf umfassende Telemetriedaten zuzugreifen, hat die Art und Weise, wie ich mit meinen Drohnen interagiere, verändert.
Das richtige Protokoll wählen
Bei so vielen Optionen kann die Auswahl des richtigen Protokolls überwältigend sein. Hier sind meine praktischen Ratschläge für verschiedene Flugszenarien.
Für Rennen
Priorität: Minimale Latenz und zuverlässige Leistung in überfüllten HF-Umgebungen
- Beste Wahl: ExpressLRS mit 500Hz oder höher
- Alternative: GHST mit 250Hz
- Budget-Option: iBUS (bei Verwendung von FlySky-Ausrüstung)
Für Rennen verwende ich ausschließlich ExpressLRS mit 500Hz. Die Kombination aus ultraniedriger Latenz und hervorragender Störfestigkeit ist unübertroffen, insbesondere in überfüllten Rennumgebungen, in denen Dutzende von Videosendern und Steuerungsverbindungen gleichzeitig arbeiten.
Für Freestyle
Priorität: Gute Balance zwischen Reaktionsfähigkeit und Reichweite
- Beste Wahl: ExpressLRS mit 250Hz
- Alternative: CRSF (Crossfire) mit 150Hz
- Budget-Option: F.Port oder SBUS mit FrSky-Ausrüstung
Freestyle-Fliegen profitiert von reaktionsschnellen Steuerungen, erfordert aber nicht die absolute Mindestlatenz des Rennens. Ich habe festgestellt, dass 250Hz ExpressLRS der ideale Kompromiss ist und ein hervorragendes Stick-Gefühl bietet, während es mehr als genug Reichwe
Für große Reichweiten
Priorität: Maximale zuverlässige Reichweite mit akzeptabler Latenz
- Beste Wahl: ExpressLRS 900MHz bei 25-50Hz
- Alternative: TBS Crossfire 900MHz
- Budget-Option: FrSky R9 (mit Einschränkungen)
Für meine dedizierten Long-Range-Builds hat sich ExpressLRS 900MHz bei 25Hz als unschlagbar erwiesen. Die Kombination aus effizientem Protokolldesign, LoRa-Modulation und niedriger Paketrate ermöglicht eine außergewöhnliche Reichweite bei gleichzeitig nutzbarer Steuerungsreaktionszeit.
Für Anfänger
Priorität: Einfachheit, Zuverlässigkeit und angemessene Leistung
- Beste Wahl: ExpressLRS bei 100Hz (mit entsprechender Anleitung)
- Alternative: SBUS oder F.Port mit FrSky-Ausrüstung
- Budget-Option: iBUS mit FlySky-Ausrüstung
Obwohl ExpressLRS die beste Leistung bietet, können seine Konfigurationsoptionen Anfänger überfordern. Wenn Sie einem neuen Piloten helfen, bieten Sie entweder Einrichtungsunterstützung mit ExpressLRS an oder empfehlen Sie ein einfacheres System wie FrSky mit SBUS, das gute Leistung bei geringerer Komplexität bietet.
Für cinematisches Fliegen
Priorität: Sanfte Steuerung und zuverlässige Verbindung
- Beste Wahl: ExpressLRS bei 100Hz oder 50Hz
- Alternative: CRSF (Crossfire) bei 50Hz
- Budget-Option: SBUS oder F.Port
Cinematisches Fliegen profitiert von sanften Steuereingaben anstelle von schneller Reaktion. Niedrigere Paketraten (50-100Hz) bieten mehr als genug Reaktionsfähigkeit und maximieren gleichzeitig Reichweite und Zuverlässigkeit. Ich verwende oft 50Hz ExpressLRS für meine cinematischen Builds, da es eine hervorragende Reichweite bei immer noch sanfter Steuerung bietet.
Fehlerbehebung bei Protokollproblemen
Selbst bei ordnungsgemäßer Implementierung können Probleme mit dem RC-Protokoll auftreten. So diagnostiziere und behebe ich häufige Probleme.
Häufige Probleme und Lösungen
Intermittierende Verbindung
Symptome: Zufällige Failsafes, Steuerungsaussetzer oder Telemetrie-Ausfälle
Mögliche Ursachen und Lösungen:
- Interferenzen:
- Videosender-Antenne von Empfänger-Antenne entfernen
- Stromverteilungsplatine abschirmen
- Ferritkerne an Stromleitungen verwenden
- Antennenprobleme:
- Auf beschädigte Antennen prüfen
- Korrekte Antennenausrichtung sicherstellen
- Überprüfen, ob Antennenverbindungen sicher sind
- Stromprobleme:
- Überprüfen, ob der Empfänger saubere 5V erhält
- Kondensator am Stromeingang hinzufügen
- Auf Spannungseinbrüche unter Last prüfen
Einmal habe ich wochenlang ein intermittierendes Verbindungsproblem verfolgt, bevor ich feststellte, dass meine VTX-Antenne zu nahe an meiner Empfängerantenne positioniert war. Indem ich sie nur 3 cm weiter voneinander entfernte, wurde das Problem vollständig behoben.
Keine Steuerungsreaktion
Symptome: Sender verbunden, aber keine Reaktion von der Drohne
Mögliche Ursachen und Lösungen:
- Protokoll-Mismatch:
- Überprüfen, ob das richtige Protokoll im Flugcontroller ausgewählt ist
- Sendermodul-Einstellungen prüfen
- UART-Konfiguration:
- Bestätigen, dass UART korrekt dem seriellen Empfänger zugewiesen ist
- Überprüfen, ob TX/RX-Verbindungen korrekt sind
- Signalinvertierung:
- Prüfen, ob die Invertierungseinstellung den Protokollanforderungen entspricht
- Hardware-Inverter überprüfen, falls verwendet
- Kanal-Mapping:
- Sicherstellen, dass Kanäle korrekt gemappt sind
- Auf AETR- vs. TAER-Reihenfolgeprobleme prüfen
Das häufigste "Keine Reaktion"-Problem, auf das ich stoße, ist eine falsche UART-Zuweisung. Überprüfen Sie immer doppelt, ob der UART, mit dem Sie verbunden sind, im Ports-Tab korrekt für den seriellen Empfänger konfiguriert ist.
Telemetrie-Probleme
Symptome: Keine Telemetriedaten oder intermittierende Telemetrie
Mögliche Ursachen und Lösungen:
- Fehlende Verbindung:
- Bidirektionale Verbindung für Protokolle überprüfen, die dies erfordern
- Prüfen, ob TX-Pad für Telemetrie-Protokolle angeschlossen ist
- Konfigurationsprobleme:
- Telemetrie im Sender aktivieren
- Telemetrie-Verhältniseinstellungen überprüfen (für ExpressLRS)
- Software-Mismatch:
- Firmware auf Sender und Empfänger aktualisieren
- Kompatible Versionen sicherstellen
Für ExpressLRS habe ich festgestellt, dass das Telemetrie-Verhältnis entscheidend für zuverlässige Daten ist. Für Langstreckenflüge verwende ich ein konservatives Verhältnis von 1:128, um die Stabilität der Steuerungsverbindung gegenüber der Telemetrie-Frequenz zu priorisieren.
Bindungsschwierigkeiten
Symptome: Empfänger kann nicht an Sender gebunden werden
Mögliche Ursachen und Lösungen:
- Protokollspezifische Probleme:
- ExpressLRS: Übereinstimmende Bindungsphrases und Firmware-Versionen überprüfen
- Crossfire: LUA-Skript zum Binden verwenden
- FrSky: Kompatibilität der EU/FCC-Version prüfen
- Hardware-Probleme:
- Sicherstellen, dass der Empfänger während des Bindens korrekt mit Strom versorgt wird
- Physischen Bind-Button verwenden, falls verfügbar
- Distanzprobleme:
- Sender und Empfänger während des Bindens nahe beieinander halten
- Potenzielle Störquellen entfernen
Bindungsprobleme sind oft protokollspezifisch. Bei ExpressLRS beziehen sich die meisten Bindungsprobleme, auf die ich gestoßen bin, auf nicht übereinstimmende Firmware-Versionen oder Bindungsphrases. Überprüfen Sie immer, ob diese zwischen Sender und Empfänger genau übereinstimmen.
Diagnosewerkzeuge und -techniken
Empfänger-Signalqualitätsindikatoren
Die meisten modernen Protokolle bieten Metriken zur Signalqualität:
- RSSI (Received Signal Strength Indicator):
- Misst die Gesamtsignalstärke
- Typischerweise als Prozentsatz angezeigt
- Werte unter 50% deuten auf potenzielle Probleme hin
- LQ (Link Quality):
- Misst die Paketerfolgrate
- Nützlicher als RSSI für digitale Systeme
- Werte unter 70% erfordern Untersuchung
- RF-Modus:
- Zeigt den aktuellen Betriebsmodus an (z. B. ExpressLRS-Umschaltung zwischen 250Hz/50Hz basierend auf Signal)
- Hilft zu überprüfen, ob dynamische Systeme ordnungsgemäß funktionieren
Ich verlasse mich stark auf LQ für ExpressLRS- und Crossfire-Systeme, da es eine aussagekräftigere Anzeige der Verbindungsintegrität bietet als RSSI. Die Überwachung von LQ-Trends während des Fluges kann frühzeitig vor potenziellen Problemen warnen.
Flugcontroller-Diagnose
Der Flugcontroller kann wertvolle Diagnoseinformationen liefern:
- Empfänger-Tab:
- Überprüfen, ob Kanalbewegungen mit Stick-Eingaben übereinstimmen
- Auf Signalbeschneidung oder abnormale Werte prüfen
- Bestätigen, dass das Kanal-Mapping korrekt ist
- CLI-Befehle:
status- Zeigt aktiven seriellen RX-Anbieter anrxrange- Zeigt Kanalbereiche anset serialrx_- Listet aktuelle serielle RX-Einstellungen auf
- Blackbox-Logging:
- RC-Befehlsdaten auf Aussetzer oder Inkonsistenzen analysieren
- RC-Daten mit Gyro-Reaktion für Latenzbeurteilung vergleichen
Bei der Fehlerbehebung subtiler Steuerungsprobleme verwende ich oft Blackbox-Logs, um RC-Befehlsdaten zu analysieren. Dies hat mir geholfen, Probleme wie Fehlkonfigurationen der RC-Glättung zu identifizieren und zu beheben, die während des Fluges nicht sofort ersichtlich waren.
Zukunft der RC-Protokolle
Die Landschaft der RC-Protokolle entwickelt sich rasant weiter. Hier sind die Trends und Entwicklungen, die ich genau beobachte.
Aktuelle Trends
- Steigende Aktualisierungsraten: Das Streben nach geringerer Latenz geht weiter, mit jetzt verfügbaren 1000Hz und möglicherweise höheren Raten in der Zukunft.
- Open-Source-Entwicklung: Community-getriebene Projekte wie ExpressLRS innovieren schneller als proprietäre Systeme.
- Frequenzagilität: Systeme, die auf mehreren Bändern (2,4 GHz, 900 MHz, 868 MHz) arbeiten können, bieten Flexibilität für verschiedene Regionen und Anwendungen.
- Integration mit Digital-FPV: Engere Integration zwischen Steuerungs- und Videosystemen, möglicherweise gemeinsame Nutzung von Antennen oder Frequenzbändern.
- Telemetrie-Erweiterung: Umfassendere Telemetriedaten, einschließlich Videolink-Statistiken und erweiterten Flugparametern.
Aufkommende Technologien
Mehrere vielversprechende Technologien zeichnen sich ab, die RC-Protokolle weiter verändern könnten:
- KI-gestützte Signalverarbeitung: Maschinelle Lernalgorithmen, die sich in Echtzeit an HF-Umgebungen anpassen.
- Mesh-Netzwerke: Verteilte Netzwerke, in denen mehrere Drohnen Signale weiterleiten und so die effektive Reichweite erhöhen können.
- Cognitive Radio: Systeme, die automatisch verfügbare Kanäle erkennen und die Übertragungsparameter entsprechend ändern.
- Quantenresistente Verschlüsselung: Mit dem Fortschritt des Quantencomputings werden für kritische Anwendungen neue Sicherheitsmaßnahmen erforderlich sein.
- Software-Defined Radio (SDR): Flexiblere Funksysteme, die durch Software-Updates rekonfiguriert werden können.
FAQ: Häufige Fragen zu RC-Protokollen
Allgemeine Protokollfragen
Beeinflussen verschiedene Protokolle die Akkulaufzeit?
Ja, aber minimal auf der Drohnenseite. Höhere Paketraten verbrauchen im Empfänger etwas mehr Strom, aber der Unterschied ist im Vergleich zum Stromverbrauch der Motoren vernachlässigbar. Auf der Senderseite kann der Effekt spürbarer sein, da Hochleistungssysteme mit hoher Paketrate die Batterien schneller entladen.
Kann ich mehrere Protokolle auf derselben Drohne verwenden?
Obwohl technisch möglich (z. B. Steuerung über ein Protokoll und Telemetrie über ein anderes), wird dies aufgrund der zusätzlichen Komplexität und möglicher Interferenzen im Allgemeinen nicht empfohlen. Moderne integrierte Protokolle machen diesen Ansatz überflüssig.
Wie beeinflussen Protokolle die Videoübertragung?
Es sind getrennte Systeme, aber sie können sich durch Interferenzen gegenseitig beeinflussen. Einige fortschrittliche Systeme wie DJI O3 und Walksnail beginnen, Steuerung und Videoübertragung für eine bessere Koordination und reduzierte Interferenzen zu integrieren.
Gibt es gesetzliche Beschränkungen für RC-Protokolle?
Ja, die Frequenznutzung und Sendeleistung sind in verschiedenen Ländern unterschiedlich reguliert. Prüfen Sie immer die lokalen Vorschriften, insbesondere für 900-MHz-Systeme, die weltweit unterschiedliche Frequenzzuweisungen haben (868 MHz in der EU, 915 MHz in den USA).
Technische Protokollfragen
Was ist der Unterschied zwischen RSSI und LQ?
RSSI (Received Signal Strength Indicator) misst die Rohsignalstärke, während LQ (Link Quality) den Prozentsatz der erfolgreich empfangenen Pakete misst. LQ ist für digitale Systeme im Allgemeinen nützlicher, da es direkt die Zuverlässigkeit der Kommunikation anzeigt.
Wie beeinflusst die Paketrate Latenz und Reichweite?
Höhere Paketraten reduzieren die Latenz, verringern aber typischerweise die Reichweite aufgrund kürzerer Zeit für Fehlerkorrektur und geringerer Energie pro Paket. Deshalb verwendet Langstreckenflug niedrigere Paketraten (25-50Hz), während Racing höhere Raten (500Hz+) verwendet.
Was verursacht Failsafes selbst bei gutem RSSI/LQ?
Mehrere Faktoren können dies verursachen: Interferenzen auf bestimmten Frequenzen, vorübergehende Signalblockierung, Probleme mit der Empfängerhardware oder Stromversorgungsprobleme. Ein guter RSSI garantiert nicht, dass alle Pakete korrekt empfangen werden.
Kann ich die Protokollleistung mit besseren Antennen verbessern?
Absolut. Antennenqualität, -typ und -platzierung können Reichweite und Zuverlässigkeit dramatisch beeinflussen. Für kritische Anwendungen bieten Diversity-Systeme mit mehreren Antennen in verschiedenen Ausrichtungen die beste Leistung.
Fragen zur Protokollauswahl
Ist ExpressLRS wirklich so viel besser als andere Protokolle?
Für die meisten Metriken (Latenz, Reichweite, Flexibilität) ja. Die Open-Source-Natur hat eine schnelle Entwicklung und Optimierung ermöglicht. Andere Protokolle können jedoch in bestimmten Bereichen wie Ökosystemintegration oder Einfachheit Vorteile bieten.
Sollte ich für große Reichweite 2,4 GHz oder 900 MHz wählen?
900 MHz bietet aufgrund der niedrigeren Frequenz im Allgemeinen eine bessere Durchdringung und Reichweite, aber 2,4-GHz-Systeme können mit optimierten Einstellungen ebenfalls eine beeindruckende Reichweite erzielen. Wenn maximale Reichweite Priorität hat und 900 MHz in Ihrer Region legal ist, ist es normalerweise die bessere Wahl.
Welches Protokoll hat die beste Störfestigkeit?
ExpressLRS und TBS Crossfire überzeugen hier beide mit ausgeklügeltem Frequenzhopping und Fehlerkorrektur. ExpressLRS bei höheren Paketraten (250Hz+) ist besonders gut in überfüllten HF-Umgebungen wie Rennveranstaltungen.
Lohnt sich ein Upgrade von SBUS auf ein neueres Protokoll?
Für die meisten Piloten ja. Die Verbesserungen bei Latenz, Telemetrieintegration und Zuverlässigkeit sind spürbar. Die größten Gewinne ergeben sich, wenn sowohl das HF-System (z. B. auf ExpressLRS) als auch das Protokoll zwischen Empfänger und Flugsteuerung (z. B. auf CRSF) aufgerüstet werden.
Fazit
RC-Protokolle haben sich dramatisch weiterentwickelt, von den einfachen analogen Systemen der Vergangenheit bis hin zu den heutigen hochentwickelten digitalen Kommunikationssystemen. Das Verständnis dieser Protokolle ist entscheidend für die Optimierung der Leistung und Zuverlässigkeit Ihrer Drohne.
Die aktuelle Landschaft wird von seriellen Protokollen wie SBUS für traditionelle Systeme, CRSF für Hochleistungsanwendungen und spezialisierten Protokollen wie GHST und iBUS für bestimmte Ökosysteme dominiert. Gleichzeitig entwickeln sich die HF-Systeme, die diese Protokolle implementieren, weiter, wobei ExpressLRS neue Maßstäbe für Leistung und Wert setzt.
Bei der Auswahl eines Protokolls sollten Sie Ihre spezifischen Anforderungen berücksichtigen:
- Für Rennen priorisieren Sie minimale Latenz mit ExpressLRS bei hohen Paketraten
- Für Freestyle balancieren Sie Reaktionsfähigkeit und Reichweite mit moderaten Paketraten
- Für große Reichweite konzentrieren Sie sich auf Zuverlässigkeit und Durchdringung mit 900-MHz-Systemen
- Für Anfänger wählen Sie Systeme mit guter Dokumentation und Community-Unterstützung
Denken Sie daran, dass eine ordnungsgemäße Implementierung genauso wichtig ist wie die Protokollauswahl. Antennenplatzierung, Konfigurationseinstellungen und regelmäßige Wartung spielen eine entscheidende Rolle für eine optimale Leistung.
Mit fortschreitender Technologie können wir von zukünftigen RC-Protokollen noch beeindruckendere Fähigkeiten erwarten. Der Trend zur Open-Source-Entwicklung, höheren Aktualisierungsraten und engeren Integration mit anderen Systemen verspricht eine spannende Zukunft für Drohnen-Steuerungssysteme.


