Overview of Drone RC Protocols

Radio control protocols are the digital languages that allow your transmitter to communicate with your drone. After years of testing various RC systems across different flying conditions, I've learned that understanding these protocols is crucial for optimizing performance and reliability. This comprehensive guide explores the major RC protocols available today and their technical characteristics, focusing specifically on the communication standards rather than the hardware ecosystems that implement them.
Introduction to RC Protocols
When we talk about drone radio control systems, we often focus on the physical transmitters and receivers. However, it's the underlying protocol—the communication standard that defines how data is packaged, transmitted, and interpreted—that truly determines performance. Think of protocols as different languages: while all allow communication, some are more efficient, precise, or robust than others in specific situations.
I still remember my early days of flying with basic PWM receivers, where each channel required a separate wire and signal interference was a constant concern. The evolution to modern digital protocols has transformed the reliability and capabilities of RC systems, enabling features that were once unimaginable.
The Evolution of RC Protocols
RC communication has evolved dramatically over the decades:
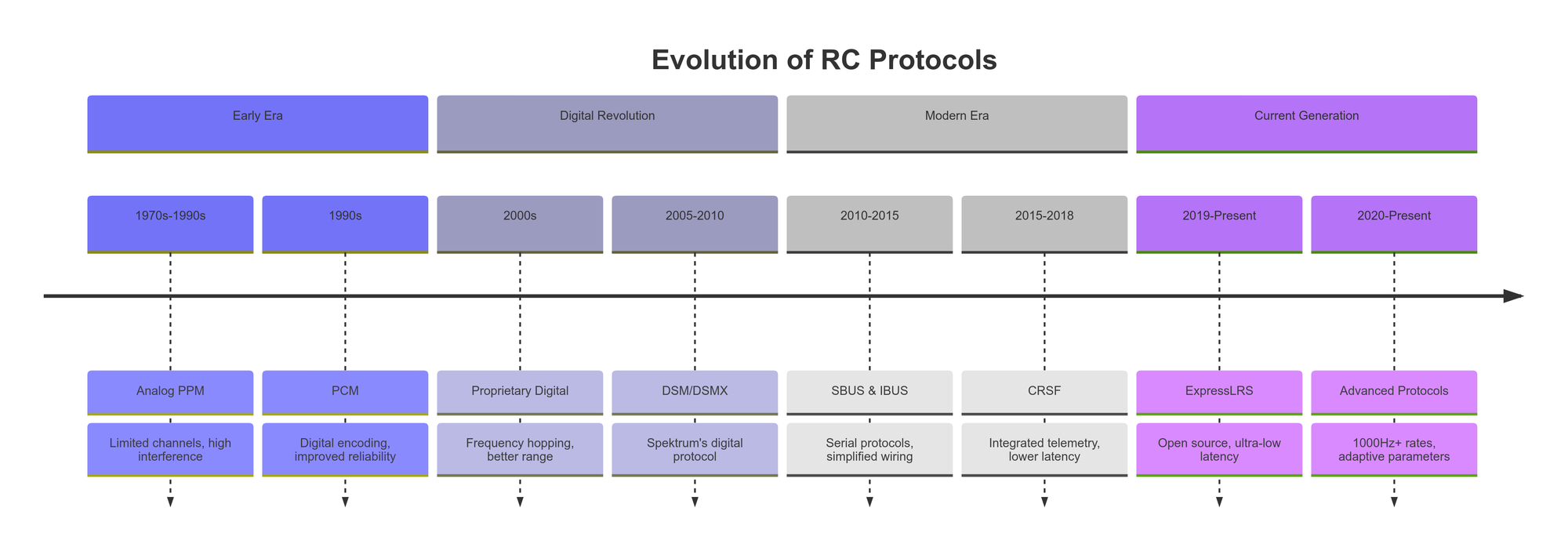
- Early Days (1970s-1990s): Simple analog PPM (Pulse Position Modulation) with limited channels and susceptibility to interference.
- Digital Revolution (2000s): Introduction of PCM (Pulse Code Modulation) and early proprietary digital protocols with improved reliability and features. This was a game-changer—suddenly, mid-air failures became much less common.
- Modern Era (2010s): Development of sophisticated serial protocols like SBUS, CRSF, and iBUS, offering multiple channels, telemetry, and advanced features.
- Current Generation (2020s): Advanced protocols pushing the boundaries of performance with unprecedented refresh rates and range. The technical improvements in protocol design have enabled performance that wasn't possible with consumer equipment just a few years ago.
Why Protocols Matter
The protocol you choose affects several critical aspects of your flying experience:
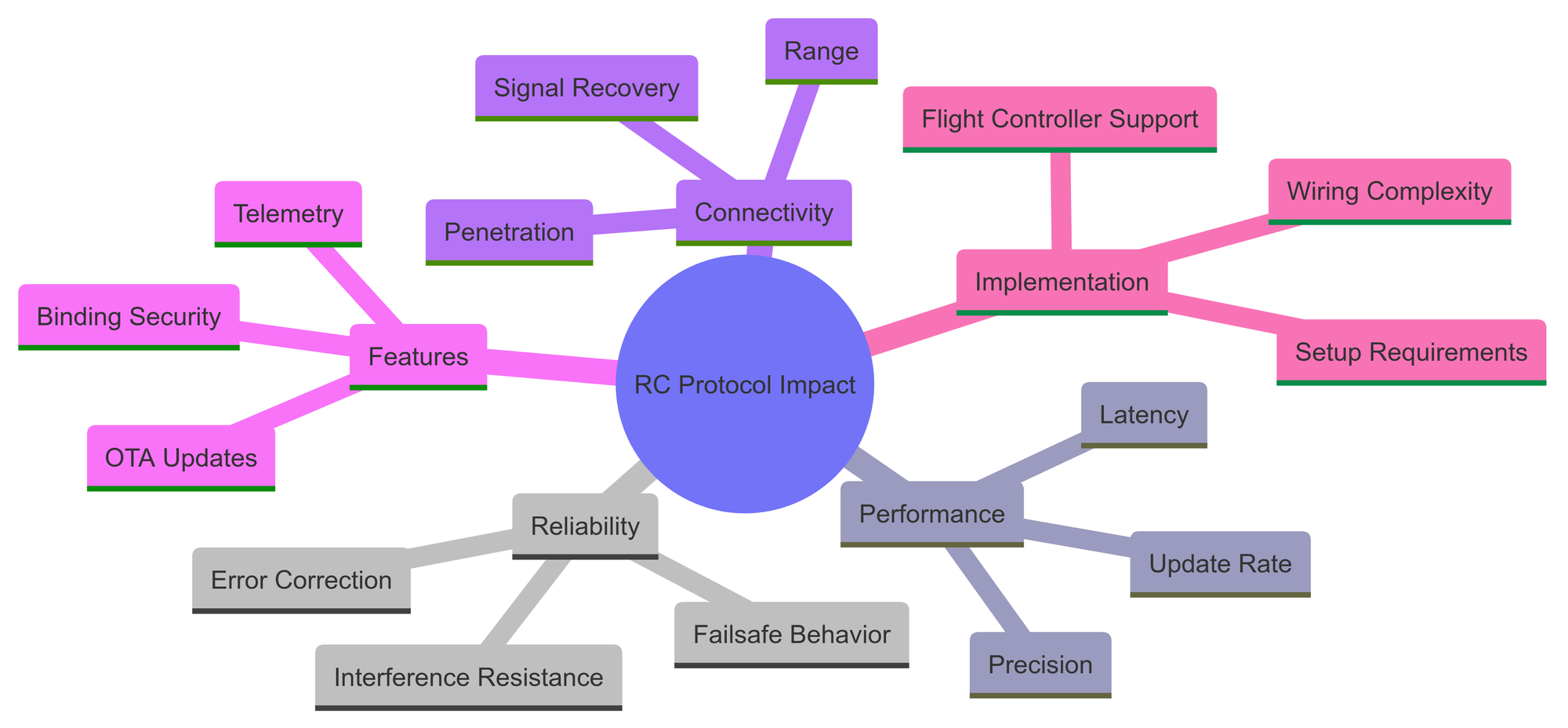
- Latency: How quickly your stick movements translate to drone response
- Range: How far you can fly while maintaining reliable control
- Reliability: How resistant the link is to interference and signal loss
- Features: What additional capabilities are available (telemetry, over-the-air updates, etc.)
- Hardware Requirements: What equipment is needed to use the protocol
I've experienced firsthand how switching protocols can transform a drone's performance. The right protocol can make the difference between a drone that feels sluggish and unresponsive and one that feels like an extension of your thoughts.
Understanding Protocol Fundamentals
Before diving into specific protocols, it's important to understand the technical concepts that differentiate them.
Key Technical Concepts
Signal Modulation
How information is encoded onto the carrier wave:

- Frequency Hopping Spread Spectrum (FHSS): Rapidly switches frequencies according to a predetermined pattern, improving resistance to interference. Most modern protocols use some form of FHSS.
- Direct Sequence Spread Spectrum (DSSS): Spreads the signal across a wide bandwidth, making it resistant to narrowband interference. Less common in drone applications.
- Adaptive Frequency Agility: Advanced systems that actively detect and avoid interference by changing frequency patterns. I've found these particularly valuable when flying in urban environments with unpredictable RF noise.
Data Rates and Packet Structure
How information is packaged and transmitted:
| Concept | Description | Impact on Performance |
|---|---|---|
| Packet Rate | Number of data packets sent per second (Hz) | Higher rates = lower latency but reduced range |
| Packet Size | Amount of information in each transmission | Larger packets = more data but longer transmission time |
| Error Correction | Methods to detect and recover from errors | More robust correction = better reliability but increased latency |
| Channel Resolution | Precision of control values (bits) | Higher resolution = more precise control but larger packets |
| Framing | How packets are structured and identified | Efficient framing = lower overhead and better performance |
I've experimented extensively with different packet rates and found that the optimal setting varies dramatically based on flying style. For racing, I prefer 500Hz or higher for minimal latency, while for long-range cruising, 50Hz or lower provides better range with still-acceptable responsiveness.
Link Budget
The overall power balance of the radio link:

Understanding link budget has been crucial for my long-range builds. I've learned that doubling transmit power adds much less range than optimizing antennas or improving receiver sensitivity.
Protocol vs. RF System vs. Physical Connection
It's important to distinguish between related but different concepts:
| Concept | Description | Examples |
|---|---|---|
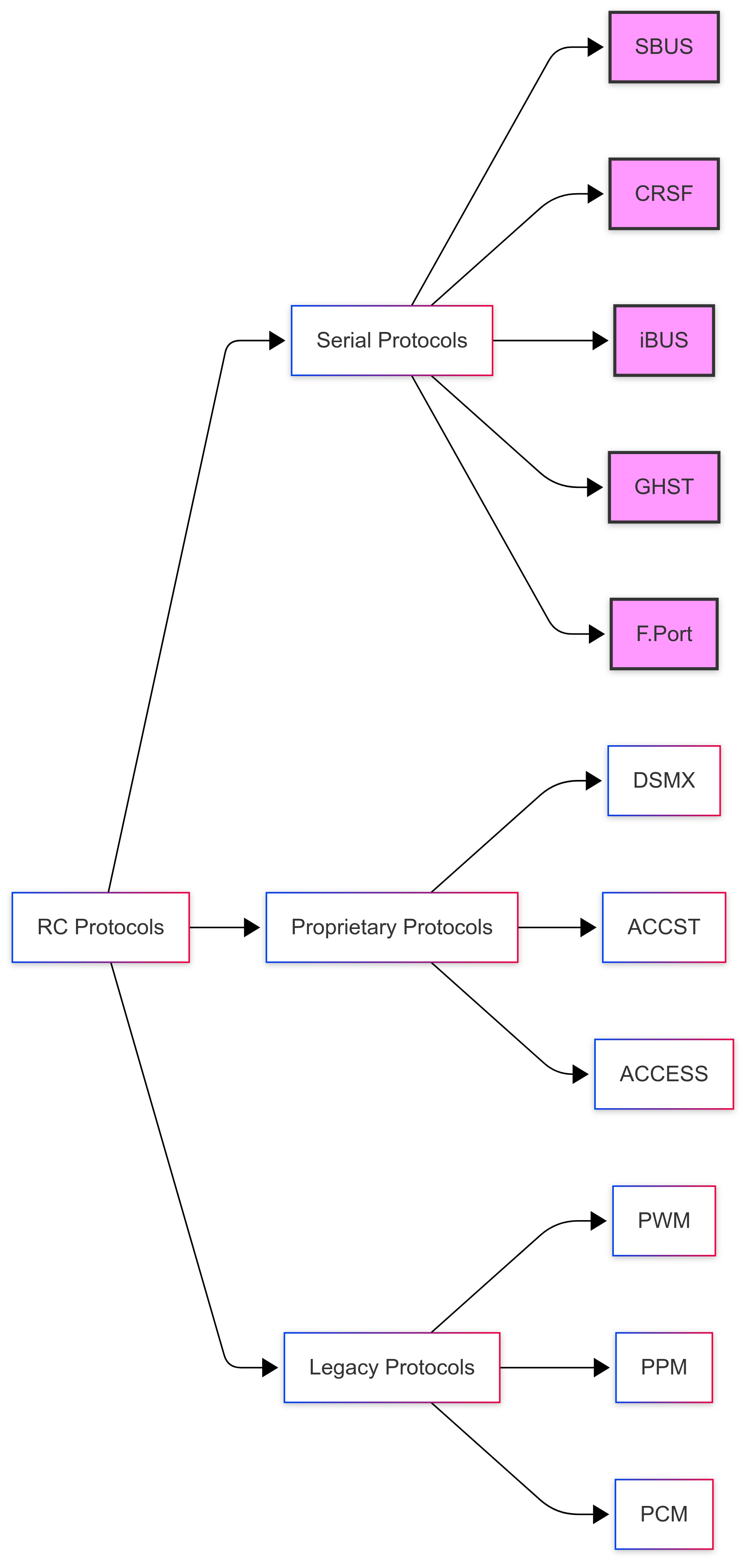
| Protocol | Communication standard defining how data is structured | CRSF, SBUS, iBUS, GHST |
| RF System | Radio frequency technology used to transmit the signal | ExpressLRS, Crossfire, ACCST, DSMX |
| Physical Connection | How the receiver connects to the flight controller | UART, PWM, I2C, SPI |
This distinction is important because the same protocol (e.g., CRSF) can be used by different RF systems (e.g., TBS Crossfire and ExpressLRS), and the same RF system can sometimes support multiple protocols.
Major RC Protocols
Let's examine the most significant protocols in the drone world, based on my extensive testing and real-world experience.
Protocol Comparison Overview
SBUS (Serial Bus)
Developed by Futaba and widely adopted by FrSky and others, SBUS has been a standard for many years.
Technical Characteristics
- Data Rate: 100,000 bps
- Update Rate: Typically 9ms (111Hz)
- Channels: Up to 16 proportional + 2 digital
- Latency: ~14ms end-to-end (typical)
- Signal Type: Inverted UART serial
- Telemetry: Not included in SBUS itself (requires separate connection)
Strengths
- Widespread Compatibility: Supported by virtually all flight controllers
- Simplicity: Single-wire connection to the flight controller
- Reliability: Proven track record in countless builds
Limitations
- Signal Inversion: Requires inverter for F1/F3 flight controllers (F4 and newer have built-in inverters)
- Moderate Latency: Not as responsive as newer protocols
- No Integrated Telemetry: Requires separate connection for telemetry data
I've used SBUS in dozens of builds over the years, and it remains a solid, dependable choice. I particularly appreciate its universal compatibility—I've never encountered a flight controller that couldn't use SBUS.
CRSF (Crossfire RF)
Developed by Team BlackSheep for their Crossfire system and later adopted by ExpressLRS, CRSF has become the gold standard for high-performance RC links.
Technical Characteristics
- Data Rate: 420,000 bps
- Update Rate: Variable from 50Hz to 1000Hz (depending on implementation)
- Channels: Up to 12 channels
- Latency: As low as 2ms (at 1000Hz)
- Signal Type: Non-inverted UART serial
- Telemetry: Integrated bidirectional communication
Strengths
- Low Latency: Extremely responsive control
- Integrated Telemetry: Comprehensive data feedback in the same connection
- Advanced Features: Support for LUA scripts, over-the-air updates, model matching
- Flexible Implementation: Used by multiple RF systems with different characteristics
Limitations
- Complexity: More setup options can be overwhelming for beginners
- Hardware Requirements: Needs flight controller with available UART
- Implementation Variations: Different systems using CRSF may have different capabilities
CRSF has been my protocol of choice for serious builds since 2018. The combination of low latency, integrated telemetry, and advanced features makes it hard to beat. The protocol's design allows for excellent performance across a wide range of applications.
iBUS
Developed by FlySky, iBUS offers a straightforward serial protocol with integrated telemetry.
Technical Characteristics
- Data Rate: 115,200 bps
- Update Rate: Typically 8ms (125Hz)
- Channels: Up to 14 channels
- Latency: ~12ms end-to-end (typical)
- Signal Type: Non-inverted UART serial
- Telemetry: Integrated bidirectional communication
Strengths
- No Signal Inversion: Works directly with all flight controllers
- Integrated Telemetry: Single-wire solution for control and data
- Simplicity: Straightforward setup with minimal configuration
Limitations
- Limited Ecosystem: Primarily used with FlySky equipment
- Fewer Advanced Features: Compared to CRSF or GHST
- Less Common: Less community support and development
I've used iBUS in several budget builds, and it performs admirably for the price point. The non-inverted signal is particularly convenient when working with older flight controllers, eliminating the need for signal inverters that SBUS requires.
GHST (Ghost)
Developed by ImmersionRC for their Ghost system, GHST offers an excellent balance of performance characteristics.
Technical Characteristics
- Data Rate: 420,000 bps
- Update Rate: Variable from 50Hz to 250Hz
- Channels: Up to 12 channels
- Latency: As low as 5ms
- Signal Type: Non-inverted UART serial
- Telemetry: Integrated bidirectional communication
Strengths
- Very Low Latency: Excellent responsiveness
- Good Range: Better than average distance capabilities
- Clean Implementation: Well-designed protocol with efficient use of bandwidth
- Open Documentation: Transparent protocol specifications
Limitations
- Limited Adoption: Not as widely used as CRSF or SBUS
- Fewer Hardware Options: Limited selection of compatible equipment
- Less Community Development: Smaller ecosystem of tools and resources
I tested GHST extensively and was impressed with its technical implementation. The protocol achieves an excellent balance between latency and range, though it hasn't gained the market share of some competitors.
DSMX
Developed by Spektrum, DSMX is widely used in the USA and in ready-to-fly models.
Technical Characteristics
- Data Rate: Proprietary
- Update Rate: 11ms (91Hz) or 22ms (45Hz)
- Channels: Up to 12 channels
- Latency: ~14ms (11ms frame rate) or ~25ms (22ms frame rate)
- Signal Type: Proprietary serial
- Telemetry: Limited in most implementations
Strengths
- Widespread in RTF Models: Common in ready-to-fly drones
- Strong US Market Presence: Well-supported in North America
- Binding Simplicity: Easy receiver binding process
Limitations
- Closed Ecosystem: Proprietary protocol with limited third-party support
- Higher Latency: Not as responsive as newer protocols
- Limited Telemetry: Basic compared to CRSF or GHST
While I haven't used DSMX as extensively as other protocols, I've worked with several Spektrum-equipped drones. The protocol is reliable but feels dated compared to newer alternatives, particularly in terms of latency and feature set.
F.Port
Developed by FrSky, F.Port combines SBUS control and SmartPort telemetry into a single connection.
Technical Characteristics
- Data Rate: 115,200 bps
- Update Rate: Typically 9ms (111Hz)
- Channels: Up to 16 proportional + 2 digital
- Latency: ~14ms end-to-end (typical)
- Signal Type: Half-duplex UART
- Telemetry: Integrated bidirectional communication
Strengths
- Single-Wire Solution: Combines control and telemetry
- Compatibility: Works with existing FrSky ecosystem
- Resource Efficiency: Frees up UART ports on the flight controller
Limitations
- FrSky-Specific: Limited to FrSky equipment
- Setup Complexity: Can be tricky to configure properly
- Declining Popularity: Being superseded by newer protocols
I converted several of my FrSky builds from separate SBUS/SmartPort to F.Port. The single-wire solution is elegant, though I found the setup more finicky than expected, often requiring firmware updates to both receiver and transmitter.
FrSky Protocols
FrSky has developed several protocols that deserve specific mention due to their widespread use in the drone community.
ACCST (Advanced Continuous Channel Shifting Technology)
FrSky's original digital protocol that gained widespread adoption:
- Data Rate: Variable
- Update Rate: Typically 9ms (111Hz)
- Channels: Up to 16 channels (D16 mode)
- Latency: ~14ms end-to-end (typical)
- Signal Type: 2.4GHz FHSS
- Telemetry: Available via separate SmartPort connection
Variants:
- D8: 8-channel mode compatible with older receivers
- D16: 16-channel mode with enhanced features
- LR12: Long-range variant with reduced channels
I used ACCST D16 for years and found it to be a reliable protocol for everyday flying. While not as advanced as newer options, it provided consistent performance and good compatibility across a wide range of flight controllers.
ACCESS (Advanced Communication Control, Elevated Spread Spectrum)
FrSky's newer protocol introduced in 2019 as a replacement for ACCST:
- Data Rate: Higher than ACCST
- Update Rate: Typically 9ms (111Hz)
- Channels: Up to 24 channels
- Latency: ~12-14ms end-to-end (typical)
- Signal Type: 2.4GHz FHSS with enhanced security
- Telemetry: Integrated with higher bandwidth
Key Features:
- Enhanced Security: Uses unique ID binding to prevent unauthorized connections
- Over-the-Air Updates: Ability to update receiver firmware from the transmitter
- Spectrum Analysis: Built-in frequency scanning to avoid interference
- Smart Match: Simplified binding process with receiver registration
My experience with ACCESS has been mixed. While the enhanced security features and OTA updates are valuable, the transition from ACCST was confusing due to compatibility issues. When properly set up, ACCESS performs slightly better than ACCST in terms of range and reliability, but the differences aren't dramatic for typical flying scenarios.
Legacy Protocols
While less common in modern drones, these protocols are worth understanding for historical context:
PWM (Pulse Width Modulation)
- Characteristics: One wire per channel, direct servo control
- Limitations: Bulky wiring, limited channels, susceptible to interference
- Current Use: Rarely used in modern drones except for direct servo connections
PPM (Pulse Position Modulation)
- Characteristics: Multiple channels on a single wire, analog signal
- Limitations: Limited channels (typically 8), moderate latency
- Current Use: Occasionally found in basic or older equipment
PCM (Pulse Code Modulation)
- Characteristics: Digital encoding of control signals
- Advantages: Better error detection than PPM
- Current Use: Largely superseded by newer digital protocols
Protocol Performance Comparison
After extensive testing across various conditions, here's how the major protocols compare in key performance metrics.
Latency Comparison
Measured from stick movement to flight controller response:
| Protocol | Minimum Latency | Typical Latency | Notes |
|---|---|---|---|
| ExpressLRS | 2ms | 4-10ms | Varies with packet rate (1000Hz-50Hz) |
| GHST | 5ms | 7-12ms | Varies with packet rate (250Hz-50Hz) |
| CRSF (Crossfire) | 6ms | 10-15ms | Varies with packet rate (150Hz-50Hz) |
| iBUS | 10ms | 12-15ms | Relatively consistent |
| F.Port | 12ms | 14-16ms | Similar to SBUS |
| SBUS | 12ms | 14-16ms | Relatively consistent |
| DSMX | 14ms | 14-25ms | Depends on frame rate setting |
In my experience, latency differences become noticeable around 5ms. Flying ExpressLRS at 500Hz feels noticeably more responsive than SBUS, particularly during quick maneuvers and corrections.
Range Comparison
Based on my testing with comparable power output (100mW) and standard antennas:
| Protocol | Typical Range | Maximum Range | Notes |
|---|---|---|---|
| ExpressLRS 2.4GHz (50Hz) | 5-10km | 30km+ | Exceptional range-to-latency ratio |
| TBS Crossfire 900MHz | 5-10km | 40km+ | Industry standard for long range |
| ExpressLRS 900MHz (25Hz) | 10-20km | 50km+ | Current range champion |
| GHST 2.4GHz | 3-5km | 10km+ | Good balance of range and latency |
| FrSky R9 900MHz | 3-5km | 15km+ | Good range but less reliable than newer systems |
| FrSky ACCST 2.4GHz | 1-2km | 5km | Adequate for most flying |
| FlySky AFHDS 2A | 0.5-1.5km | 3km | Limited but sufficient for line of sight |
| DSMX | 1-2km | 3km | Adequate for most flying |
These ranges assume optimal conditions with clear line of sight. Real-world range is affected by obstacles, interference, antenna positioning, and other factors.
Reliability Comparison
Based on my experience flying in various environments:
| Protocol | Interference Resistance | Failsafe Reliability | Overall Robustness |
|---|---|---|---|
| ExpressLRS | Excellent | Excellent | Excellent |
| TBS Crossfire | Excellent | Excellent | Excellent |
| GHST | Very Good | Very Good | Very Good |
| FrSky R9 | Good | Good | Good |
| F.Port | Good | Good | Good |
| SBUS | Good | Good | Good |
| iBUS | Good | Good | Good |
| DSMX | Good | Good | Good |
| FrSky ACCST | Fair | Good | Fair |
| FlySky AFHDS 2A | Fair | Fair | Fair |
I've found ExpressLRS and Crossfire to be exceptionally reliable even in challenging RF environments. During one memorable flight near a radio tower, my ExpressLRS link maintained solid connection while a friend's ACCST system experienced multiple failsafes.
Feature Comparison
| Protocol | Telemetry | OTA Updates | Binding Method | Advanced Features |
|---|---|---|---|---|
| CRSF | Comprehensive | Yes | Variable | Extensive (LUA scripts, model match, dynamic power) |
| ExpressLRS | Configurable | Yes | Binding Phrase | Extensive (dynamic power, WiFi updates) |
| GHST | Comprehensive | Yes | Button Press | Good (model match, dynamic power) |
| F.Port | Comprehensive | Limited | Button Press | Limited to FrSky ecosystem |
| FrSky (SmartPort) | Comprehensive | Limited | Button Press | Limited to FrSky ecosystem |
| iBUS | Basic | No | Button Press | Limited |
| SBUS | None (separate) | No | Button Press | Limited |
| DSMX | Basic | No | Button Press | Limited (model match) |
The feature gap between newer protocols like CRSF/ExpressLRS and older standards is substantial. The ability to update firmware over-the-air and access comprehensive telemetry has transformed how I interact with my drones.
Choosing the Right Protocol
With so many options, selecting the right protocol can be overwhelming. Here's my practical advice based on different flying scenarios.
For Racing
Priority: Minimum latency and reliable performance in crowded RF environments
- Best Choice: ExpressLRS at 500Hz or higher
- Alternative: GHST at 250Hz
- Budget Option: iBUS (if using FlySky equipment)
For racing, I exclusively use ExpressLRS at 500Hz. The combination of ultra-low latency and excellent interference resistance is unmatched, particularly in crowded race environments where dozens of video transmitters and control links operate simultaneously.
For Freestyle
Priority: Good balance of responsiveness and range
- Best Choice: ExpressLRS at 250Hz
- Alternative: CRSF (Crossfire) at 150Hz
- Budget Option: F.Port or SBUS with FrSky equipment
Freestyle flying benefits from responsive controls but doesn't require the absolute minimum latency of racing. I've found 250Hz ExpressLRS to be the sweet spot, offering excellent stick feel while maintaining more than enough range for typical freestyle sessions.
For Long Range
Priority: Maximum reliable range with acceptable latency
- Best Choice: ExpressLRS 900MHz at 25-50Hz
- Alternative: TBS Crossfire 900MHz
- Budget Option: FrSky R9 (with limitations)
For my dedicated long-range builds, ExpressLRS 900MHz at 25Hz has proven unbeatable. The combination of efficient protocol design, LoRa modulation, and low packet rate enables extraordinary range while maintaining usable control responsiveness.
For Beginners
Priority: Simplicity, reliability, and adequate performance
- Best Choice: ExpressLRS at 100Hz (with appropriate guidance)
- Alternative: SBUS or F.Port with FrSky equipment
- Budget Option: iBUS with FlySky equipment
While ExpressLRS offers the best performance, its configuration options can overwhelm beginners. If you're helping a new pilot, either provide setup assistance with ExpressLRS or recommend a simpler system like FrSky with SBUS, which offers good performance with less complexity.
For Cinematic Flying
Priority: Smooth control and reliable link
- Best Choice: ExpressLRS at 100Hz or 50Hz
- Alternative: CRSF (Crossfire) at 50Hz
- Budget Option: SBUS or F.Port
Cinematic flying benefits from smooth control inputs rather than rapid response. Lower packet rates (50-100Hz) provide more than enough responsiveness while maximizing range and reliability. I often use 50Hz ExpressLRS for my cinematic builds, as it offers excellent range with still-smooth control.
Troubleshooting Protocol Issues
Even with proper implementation, RC protocol issues can arise. Here's how I diagnose and resolve common problems.
Common Issues and Solutions
Intermittent Connection
Symptoms: Random failsafes, control glitches, or telemetry dropouts
Possible Causes and Solutions:
- Interference:
- Move video transmitter antenna away from receiver antenna
- Shield power distribution board
- Use ferrite cores on power leads
- Antenna Issues:
- Check for damaged antennas
- Ensure proper antenna orientation
- Verify antenna connections are secure
- Power Problems:
- Verify receiver is getting clean 5V
- Add capacitor to power input
- Check for voltage sags under load
I once chased an intermittent connection issue for weeks before discovering that my VTX antenna was positioned too close to my receiver antenna. Moving them just 3cm further apart completely resolved the problem.
No Control Response
Symptoms: Transmitter connected but no response from drone
Possible Causes and Solutions:
- Protocol Mismatch:
- Verify correct protocol selected in flight controller
- Check transmitter module settings
- UART Configuration:
- Confirm UART is properly assigned to Serial RX
- Verify TX/RX connections are correct
- Signal Inversion:
- Check if inversion setting matches protocol requirements
- Verify hardware inverter if using one
- Channel Mapping:
- Ensure channels are mapped correctly
- Check for AETR vs TAER order issues
The most common "no response" issue I encounter is incorrect UART assignment. Always double-check that the UART you've connected to is properly configured for Serial RX in the ports tab.
Telemetry Problems
Symptoms: No telemetry data or intermittent telemetry
Possible Causes and Solutions:
- Missing Connection:
- Verify bidirectional connection for protocols requiring it
- Check that TX pad is connected for telemetry protocols
- Configuration Issues:
- Enable telemetry in transmitter
- Verify telemetry ratio settings (for ExpressLRS)
- Software Mismatch:
- Update firmware on transmitter and receiver
- Ensure compatible versions
For ExpressLRS, I've found that telemetry ratio is crucial for reliable data. For long-range flights, I use a conservative 1:128 ratio to prioritize control link stability over telemetry frequency.
Binding Difficulties
Symptoms: Unable to bind receiver to transmitter
Possible Causes and Solutions:
- Protocol-Specific Issues:
- ExpressLRS: Verify matching binding phrases and firmware versions
- Crossfire: Use LUA script for binding
- FrSky: Check EU/FCC version compatibility
- Hardware Problems:
- Ensure receiver is powered properly during binding
- Try physical bind button if available
- Distance Issues:
- Keep transmitter and receiver close during binding
- Remove potential sources of interference
Binding issues are often protocol-specific. With ExpressLRS, most binding problems I've encountered relate to mismatched firmware versions or binding phrases. Always verify these match exactly between transmitter and receiver.
Diagnostic Tools and Techniques
Receiver Signal Quality Indicators
Most modern protocols provide signal quality metrics:
- RSSI (Received Signal Strength Indicator):
- Measures overall signal strength
- Typically displayed as percentage
- Values below 50% indicate potential issues
- LQ (Link Quality):
- Measures packet success rate
- More useful than RSSI for digital systems
- Values below 70% warrant investigation
- RF Mode:
- Indicates current operating mode (e.g., ExpressLRS switch between 250Hz/50Hz based on signal)
- Helps verify dynamic systems are working properly
I rely heavily on LQ for ExpressLRS and Crossfire systems, as it provides a more meaningful indication of link health than RSSI. Monitoring LQ trends during flight can provide early warning of potential issues.
Flight Controller Diagnostics
The flight controller can provide valuable diagnostic information:
- Receiver Tab:
- Verify channel movements match stick inputs
- Check for signal clipping or abnormal values
- Confirm channel mapping is correct
- CLI Commands:
status- Shows active serial RX providerrxrange- Displays channel rangesset serialrx_- Lists current serial RX settings
- Blackbox Logging:
- Analyze RC command data for glitches or inconsistencies
- Compare RC data with gyro response for latency assessment
When troubleshooting subtle control issues, I often use Blackbox logs to analyze RC command data. This has helped me identify and resolve issues like RC smoothing misconfiguration that weren't immediately apparent during flight.
Future of RC Protocols
The RC protocol landscape continues to evolve rapidly. Here are the trends and developments I'm watching closely.
Current Trends
- Increasing Update Rates: The push for lower latency continues, with 1000Hz now available and potentially higher rates in the future.
- Open Source Development: Community-driven projects like ExpressLRS are innovating faster than proprietary systems.
- Frequency Agility: Systems that can operate on multiple bands (2.4GHz, 900MHz, 868MHz) provide flexibility for different regions and applications.
- Integration with Digital FPV: Tighter integration between control and video systems, potentially sharing antennas or frequency bands.
- Telemetry Expansion: More comprehensive telemetry data, including video link statistics and advanced flight parameters.
Emerging Technologies
Several promising technologies are on the horizon that could further transform RC protocols:
- AI-Enhanced Signal Processing: Machine learning algorithms that adapt to RF environments in real-time.
- Mesh Networking: Distributed networks where multiple drones can relay signals, extending effective range.
- Cognitive Radio: Systems that automatically detect available channels and change transmission parameters accordingly.
- Quantum-Resistant Encryption: As quantum computing advances, new security measures will be needed for critical applications.
- Software-Defined Radio (SDR): More flexible radio systems that can be reconfigured through software updates.
FAQ: Common Questions About RC Protocols
General Protocol Questions
Do different protocols affect battery life?
Yes, but minimally on the drone side. Higher packet rates consume slightly more power in the receiver, but the difference is negligible compared to motor power consumption. On the transmitter side, the effect can be more noticeable, with high-power, high-packet-rate systems draining batteries faster.
Can I use multiple protocols on the same drone?
While technically possible (e.g., control via one protocol and telemetry via another), it's generally not recommended due to added complexity and potential interference. Modern integrated protocols eliminate the need for this approach.
How do protocols affect video transmission?
They're separate systems, but they can affect each other through interference. Some advanced systems like DJI O3 and Walksnail are beginning to integrate control and video transmission for better coordination and reduced interference.
Are there legal restrictions on RC protocols?
Yes, frequency usage and power output are regulated differently in various countries. Always check local regulations, particularly for 900MHz systems which have different frequency allocations worldwide (868MHz in EU, 915MHz in US).
Technical Protocol Questions
What's the difference between RSSI and LQ?
RSSI (Received Signal Strength Indicator) measures the raw signal power, while LQ (Link Quality) measures the percentage of packets successfully received. LQ is generally more useful for digital systems as it directly indicates communication reliability.
How does packet rate affect latency and range?
Higher packet rates reduce latency but typically decrease range due to less time for error correction and lower energy per packet. This is why long-range flying uses lower packet rates (25-50Hz) while racing uses higher rates (500Hz+).
What causes failsafes even with good RSSI/LQ?
Several factors can cause this: interference on specific frequencies, momentary signal blockage, receiver hardware issues, or power supply problems. Good RSSI doesn't guarantee all packets are being received correctly.
Can I improve protocol performance with better antennas?
Absolutely. Antenna quality, type, and placement can dramatically affect range and reliability. For critical applications, using diversity systems with multiple antennas in different orientations provides the best performance.
Protocol Selection Questions
Is ExpressLRS really that much better than other protocols?
For most metrics (latency, range, flexibility), yes. The open-source nature has allowed rapid development and optimization. However, other protocols may offer advantages in specific areas like ecosystem integration or simplicity.
Should I choose 2.4GHz or 900MHz for long range?
900MHz generally provides better penetration and range due to the lower frequency, but 2.4GHz systems can still achieve impressive range with optimized settings. If maximum range is the priority and 900MHz is legal in your region, it's usually the better choice.
Which protocol has the best resistance to interference?
ExpressLRS and TBS Crossfire both excel here, with sophisticated frequency hopping and error correction. ExpressLRS at higher packet rates (250Hz+) is particularly good in crowded RF environments like race events.
Is it worth upgrading from SBUS to a newer protocol?
For most pilots, yes. The improvements in latency, telemetry integration, and reliability are noticeable. The biggest gains come when upgrading both the RF system (e.g., to ExpressLRS) and the protocol between receiver and flight controller (e.g., to CRSF).
Conclusion
RC protocols have evolved dramatically from the simple analog systems of the past to today's sophisticated digital communications. Understanding these protocols is crucial for optimizing your drone's performance and reliability.
The current landscape is dominated by serial protocols like SBUS for traditional systems, CRSF for high-performance applications, and specialized protocols like GHST and iBUS for specific ecosystems. Meanwhile, the RF systems that implement these protocols continue to advance, with ExpressLRS setting new standards for performance and value.
When selecting a protocol, consider your specific needs:
- For racing, prioritize minimum latency with ExpressLRS at high packet rates
- For freestyle, balance responsiveness and range with moderate packet rates
- For long range, focus on reliability and penetration with 900MHz systems
- For beginners, choose systems with good documentation and community support
Remember that proper implementation is just as important as protocol selection. Antenna placement, configuration settings, and regular maintenance all play crucial roles in achieving optimal performance.
As technology continues to advance, we can expect even more impressive capabilities from future RC protocols. The trend toward open-source development, higher update rates, and tighter integration with other systems promises an exciting future for drone control systems.



Comments ()