无人机电机:选择、性能和优化
电机是任何FPV无人机的核心,直接影响从飞行时间和敏捷性到最高速度和操控特性的方方面面。经过多年来制造数百架无人机并测试无数电机组合,我了解到电机选择既是一门艺术,也是一门科学——它可以成就或毁掉你的飞行体验。这份全面指南将带你了解关于FPV无人机电机的所有知识,从基本原理到高级优化技术。
FPV无人机电机简介
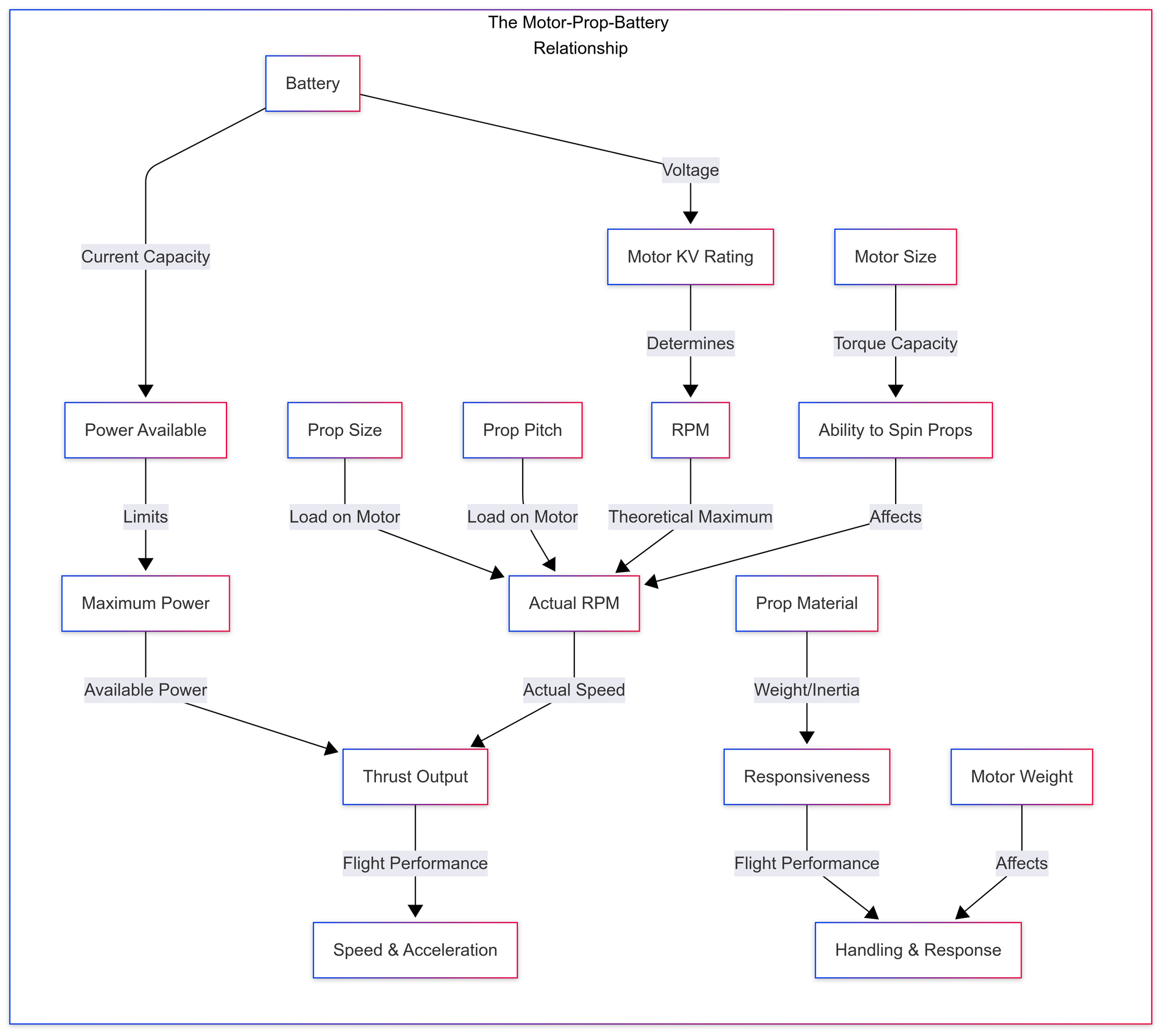
FPV(第一人称视角)无人机依靠电动无刷电机产生飞行所需的推力。这些电机将电池的电能转化为机械旋转,驱动螺旋桨产生升力和机动性。
你选择的电机将从根本上定义你的无人机的特性:
- 功率和推力决定你的加速度和最高速度
- 重量影响灵活性和飞行时间
- 响应速度影响操控精度和控制
- 效率影响电池寿命和飞行时长
- 耐用性决定它们在坠机和硬着陆中的生存能力
无论你是在制造第一架无人机还是优化第十架竞速机,了解电机技术对于创建符合你飞行目标的设置至关重要。
无人机电机的历史和演变
无人机电机的发展代表了一段令人着迷的技术创新历程,它促成了我们今天所知的现代FPV爱好。
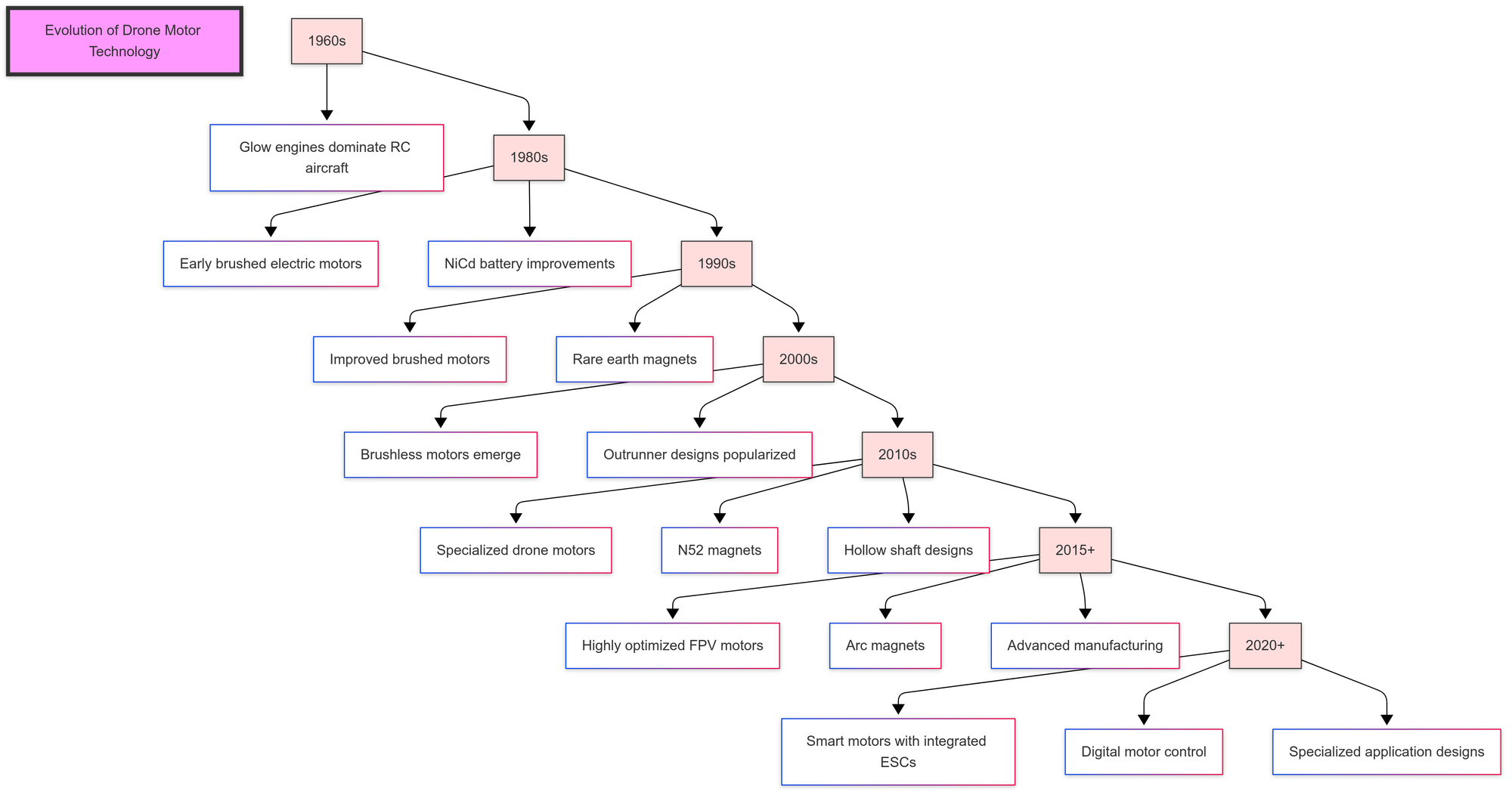
早期遥控电机(1960年代-1990年代)
最早的遥控飞机使用点火发动机(微型内燃机)或有刷电机:
- 1960年代-1970年代:点火发动机主导遥控飞机,电动选择有限
- 1980年代:随着镍镉电池的改进,早期有刷电机变得更加可行
- 1990年代:带稀土磁铁的高质量有刷电机提高了性能
这些早期电动系统笨重、低效,功率有限,难以实现真正的特技飞行。
无刷革命(2000年代)
2000年代初,无刷电机开始应用于遥控领域:
- 2000-2005年:第一批商业可行的无刷电机和电调
- 2005-2010年:外转子设计(转子围绕定子旋转)因其更高扭矩而流行
- 2007-2010年:遥控直升机推动了电机设计和控制的创新
这些早期无刷电机主要为固定翼飞机和直升机设计,而不是我们今天所知的多旋翼无人机。
多旋翼时代(2010-2015年)
多旋翼无人机的爆发创造了对专用电机的需求:
- 2010-2012年:第一代专用多旋翼电机(大型、重型设计)
- 2012-2013年:引入常见的"22XX"尺寸格式
- 2013-2014年:改进的制造技术降低了重量
- 2014-2015年:N52磁铁成为标准,显著提高了功率密度
我见过一些这个时期的"高性能"电机——当时它们被认为功率强大,但与今天的标准相比,它们笨重且动力不足,令人发笑。
现代FPV电机发展(2015年至今)
过去几年,专门针对FPV应用的电机技术快速进步:
- 2015-2017年:专用轻量化设计的竞速电机
- 2017-2018年:引入钛轴和先进的转子设计
- 2018-2019年:弧形磁铁和优化的气隙提高效率
- 2019-2020年:超轻设计,提高耐用性
- 2020年至今:集成电调和数字控制系统的智能电机
创新速度非常惊人——在相对较短的时间内,电机同时变得更轻、更强大、更高效、更耐用。
无刷电机基础
无刷电机与有刷电机
早期遥控飞机使用有刷电机,它们有与换向器接触的物理电刷来产生旋转。虽然简单且便宜,但这些电机有以下缺点:
- 效率较低
- 电刷磨损导致寿命缩短
- 功率密度有限
- 维护要求高
现代FPV无人机使用无刷直流电机(BLDC),它们用电子换向取代了物理电刷。这一进步带来了:
- 更高的效率(80-90%,而有刷为50-60%)
- 更长的寿命(没有电刷磨损)
- 更好的功率重量比
- 改进的散热
- 更低的维护要求
无刷电机组件
了解无刷电机的物理组件有助于评估不同应用的质量和适用性:
- 钟罩(转子):外部旋转部分,用于固定磁铁并连接螺旋桨。
- 定子:内部固定的铜线绕组核心。定子尺寸是一个关键规格(稍后详述)。
- 磁铁:通常由钕合金制成(N52、N54等),它们产生与定子绕组相互作用的磁场。
- 绕组:以特定模式(三角形或星形配置)缠绕在定子极上的铜线。
- 轴承:支撑旋转的钟罩并减少摩擦。优质轴承对于耐用性和性能至关重要。
- 电机轴:将钟罩连接到轴承,并延伸以安装螺旋桨。
- 底座/支架:带有安装孔的底部,用于将电机固定到无人机框架上。
无刷电机的工作原理
无刷电机基于电磁原理运作:
- ESC(电子速度控制器)向电机绕组发送精确定时的电脉冲
- 这些脉冲在定子中产生电磁场
- 电磁场与钟罩中的永磁体相互作用
- 这种相互作用产生旋转力(扭矩)
- ESC不断调整这些脉冲的时间和强度来控制速度和方向
这种电子换向使无刷电机如此高效和响应迅速。当我在狭窄的技术赛道上全力以赴时,我能感受到高品质电机/ESC组合的即时响应——从摇杆输入到电机反应几乎没有延迟。
了解电机规格
解读电机规格对于做出明智的选择至关重要。让我们来分析关键参数:
电机尺寸标识
FPV电机通常用一个四位数字标识,如2207或2306。这个标识告诉你定子的物理尺寸:
- 前两位数字:定子宽度(直径),单位为毫米
- 后两位数字:定子高度,单位为毫米
例如,2207电机的定子宽22毫米,高7毫米。
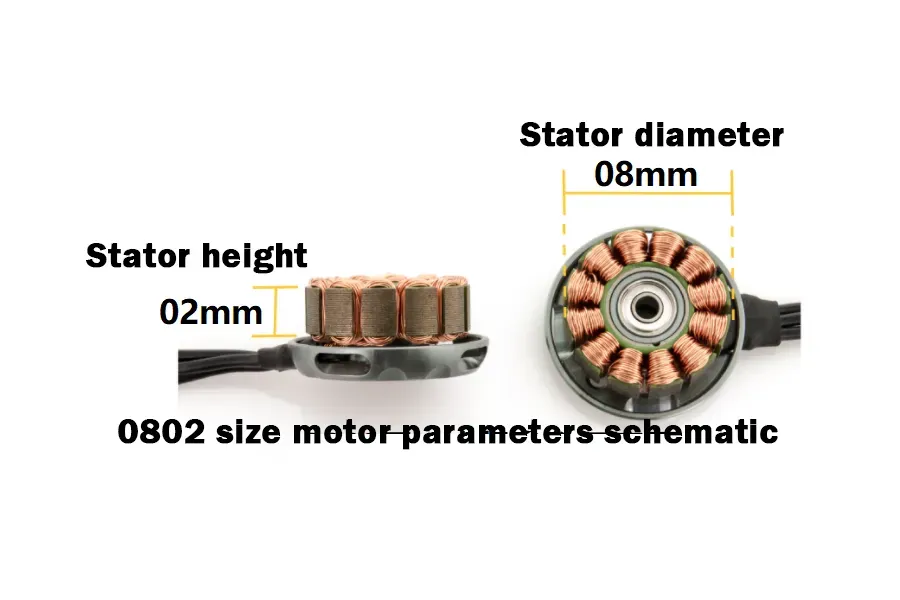

一般来说:
- 定子宽度越大 = 扭矩越大
- 定子高度越高 = 功率和顶端性能越高
根据我的经验,22毫米和23毫米定子宽度之间的差异在纸面上可能看起来很小,但在飞行中可以完全改变无人机的感觉。我的2207特技机构比我其他完全相同的2306设置响应明显更快,后者的动力输出感觉更平稳、更线性。
KV值
KV(Kilo-Velocity)表示在无负载情况下,每施加1伏电压,电机理论上的转速(每分钟转数):
- 一个2400KV的电机在4S电池上(满电16.8V)理论上会以40,320 RPM(2400 × 16.8)的速度旋转,前提是没有安装螺旋桨
实际上,由于负载和效率损失,实际转速会更低。KV值有重要影响:
- 较高KV(2400KV+):更高的最高速度,响应更快,更适合竞速和小螺旋桨
- 中等KV(1700-2300KV):平衡的性能,适合特技和全能飞行
- 较低KV(1300-1600KV):更大扭矩,效率更高,适合大螺旋桨和长航时飞行
我在FPV之旅早期犯的一个错误就是总是选择最高KV的电机,认为"越快越好"。我很快意识到,超高KV电机在特技四轴上会使其变得敏感,难以平稳飞行,更不用说大幅缩短的飞行时间了。
定子尺寸影响
定子尺寸直接影响电机性能:
| 定子尺寸 | 典型用途 | 特点 |
|---|---|---|
| 1105-1306 | 微型四轴(2-3英寸) | 轻量级,功率较低,效率高 |
| 1407-1506 | 迷你四轴(3-4英寸) | 重量和功率平衡良好 |
| 2004-2206 | 中型四轴(4-5英寸) | 响应迅速,适合技术飞行 |
| 2207-2306 | 标准5英寸四轴 | 强大的全能型选手 |
| 2407-2507 | 重型特技/影视 | 最大功率,可承载重载 |
| 2807-2912 | 7英寸以上长航时 | 大螺旋桨的高扭矩 |
更大的定子可以产生更大的功率,但会增加重量。最佳平衡取决于你的机架尺寸、电池和飞行风格。
磁铁强度和类型
磁铁按其强度分级,数字越高表示磁力越强:
- N48: 标准强度
- N52: 强力,常见于中端电机
- N54/N55: 非常强力,用于高端电机
更强的磁铁可提供更大扭矩和响应性,但可能降低效率并提高电机温度。一些制造商使用弧形磁铁(弯曲以匹配钟罩周长)而不是传统的直磁铁,声称可提高效率。
在几次硬撞后,使用较弱磁铁的电机退磁烧毁后,我发现投资使用 N52 或更好磁铁的电机可以提高耐用性,特别是对于不可避免会撞击的自由式飞行。
绕组配置
电机绕组可以排列成不同的模式:
- 三角形: 三个连接点,通常在高转速下功率更大
- 星形: 三个连接点和一个中心抽头,通常在低转速下效率更高
大多数 FPV 电机使用三角形绕组以获得其性能特点,但一些制造商为了特定的性能目标会尝试混合或修改的绕组模式。
重量考虑
电机重量是影响以下因素的关键:
- 飞行特性: 更轻的电机意味着更灵活的操控
- 总重量: 影响飞行时间和性能
- 旋转质量: 影响对油门变化的响应
现代电机在保持动力的同时趋向更轻,高端产品使用钛轴和铝/镁合金钟罩以在不牺牲强度的情况下减轻重量。
功率处理能力
电机的功率处理能力通常以瓦特为单位,取决于:
- 绕组中的铜质量
- 散热能力
- 制造质量
制造商通常提供"最大持续功率"和"瞬时功率"等规格,但这些应视为指导而非绝对限制。
在台架测试中,一个号称"1200W 能力"的电机在大约 800W 功率下仅 30 秒就熔毁后,我学会了对功率声明持怀疑态度。来自知名制造商的优质电机在额定功率方面往往更加保守。
电机选择指南
选择合适的电机需要将其特性与你的特定构建和飞行目标相匹配。
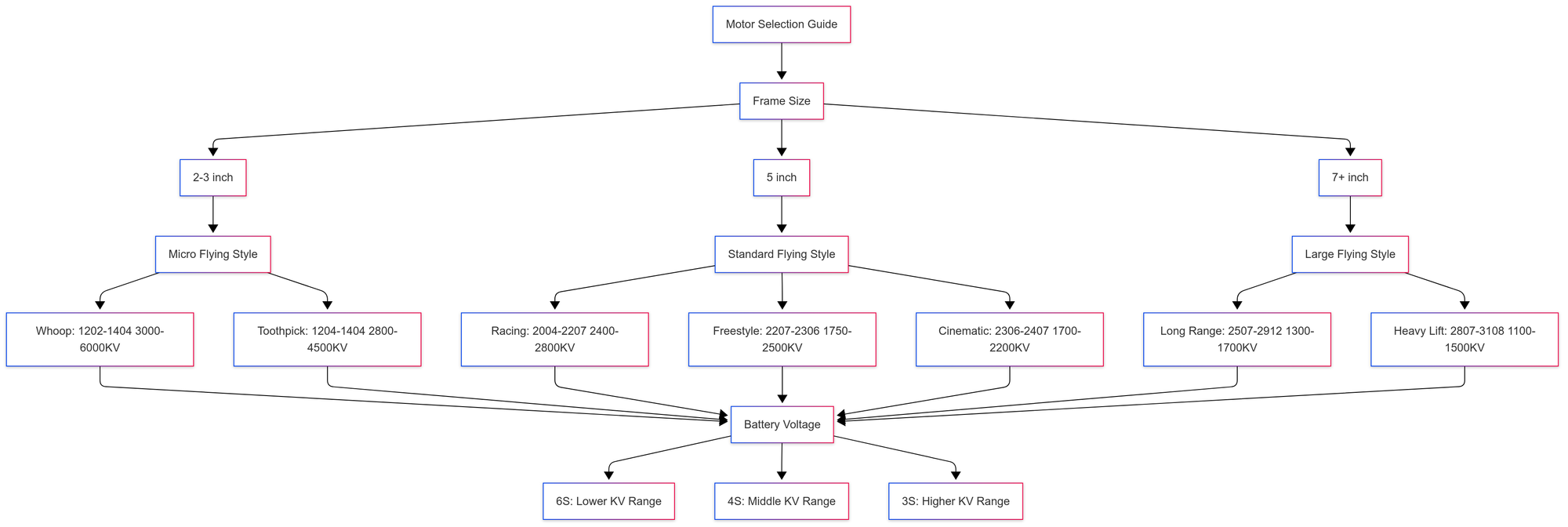
根据机架尺寸选择电机
机架尺寸在很大程度上决定了合适的电机选择:
| 机架尺寸 | 推荐电机尺寸 | 典型 KV 范围 |
|---|---|---|
| 2-3" 微型 | 1105-1306 | 3000-6000KV |
| 3" 牙签 | 1204-1404 | 2800-4500KV |
| 3.5" Cinewhoop | 1404-1506 | 2600-3600KV |
| 4" 轻量级 | 1606-2004 | 2400-3200KV |
| 5" 自由式 | 2205-2306 | 1750-2500KV |
| 5" 竞速 | 2004-2207 | 2400-2800KV |
| 6" 自由式 | 2306-2407 | 1600-2000KV |
| 7"+ 长航时 | 2507-2912 | 1300-1700KV |
这些是起点——你的具体要求可能需要与这些建议有所不同。
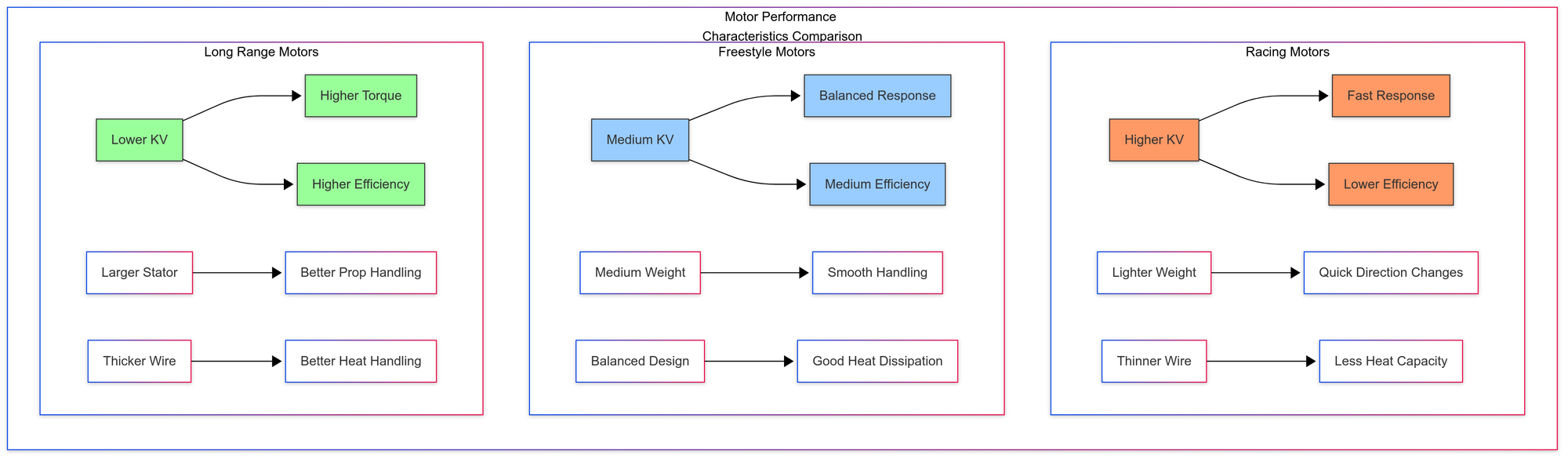
不同飞行风格的考虑因素
不同的飞行风格需要不同的电机特性:
竞速
- 重点: 速度、加速度、响应性
- 推荐: 重量更轻,KV 值更高(5 英寸为 2400-2800KV)
- 定子尺寸: 通常直径稍小但更高(例如 2207)
- 注意: 竞速电机优先考虑爆发性能而非耐用性和效率
我发现专用竞速机更适合使用重量和惯性稍低的电机,即使以牺牲一些动力为代价。在技术赛道中,快速改变方向的能力通常比绝对推力更重要。
自由式
- 重点: 平稳的动力输出、耐用性、良好的油门分辨率
- 推荐: 中等 KV 值(5 英寸为 1800-2300KV)
- 定子尺寸: 平衡(例如 2306、2207)
- 注意: 需要处理从平稳巡航到激进动作的各种飞行
对于自由式飞行,我更喜欢定子质量稍大的电机,它们可以在缓慢精确的动作和大功率特技中提供更平稳的油门响应和更好的操控性。
影视/长航时
- 重点: 效率、平稳运行、可靠性
- 推荐: 较低的 KV 值(5-7 英寸为 1300-1800KV)
- 定子尺寸: 通常更大以便与大螺旋桨配合提供扭矩(例如 2407、2507)
- 注意: 必须在动力需求与延长飞行时间的效率之间取得平衡
在我的长航时机型上,我发现以较低油门百分比运行的略大电机比以较高油门运行的小电机提供更好的效率。这种反直觉的方法为我的飞行时间增加了几分钟。
微型机
- 重点: 节省重量,提供足够动力
- 推荐: 较高的 KV 值(根据尺寸在 3000-6000KV 之间)
- 定子尺寸: 在满足动力需求的情况下尽可能小
- 注意: 每一克都很重要;即使是很小的重量差异也很明显
动力重量比
评估电机适用性的一个有用指标是整个机型的推重比:
- 竞速: 12:1 至 15:1(极其灵敏,飞行时间较短)
- 自由式: 8:1 至 12:1(灵敏性和飞行时间的良好平衡)
- 影视: 5:1 至 8:1(飞行更平稳,飞行时间更长)
- 长航时: 3:1 至 5:1(最大效率,稳定飞行)
这些比率表示可用的总推力除以无人机的全备重量。
电机和螺旋桨匹配原则
电机和螺旋桨必须仔细匹配:
- 更大的螺旋桨需要具有更大扭矩的电机(更大的定子直径)
- 更高螺距的螺旋桨会给电机带来更大的负载,可能需要更低的KV值
- 更重的螺旋桨会增加电机温度并降低响应性
5英寸四轴飞行器的一般准则:
- 5x4x3螺旋桨(5英寸,4英寸螺距,3叶片):适合2300-2600KV的电机
- 5x5x3螺旋桨:更适合1900-2300KV的电机
- 5x4.5x2螺旋桨:可以使用更高KV值(2400-2800KV)用于竞速
我曾经尝试在6S的高KV(2750KV)电机上使用激进的5x4.3x3螺旋桨,虽然推力非常惊人,但电机在2分钟的飞行后变得如此之热,我都能闻到它们的味道。正确的匹配对于长寿命至关重要。
电池电压考虑因素
电机KV值应与电池电压相匹配:
| 电池 | 适合5英寸的KV范围 | 备注 |
|---|---|---|
| 3S (12.6V) | 2600-3000KV | 现在不太常见,但仍用于某些竞速机型 |
| 4S (16.8V) | 2300-2600KV | 平衡性好,流行于特技飞行 |
| 5S (21.0V) | 1900-2300KV | 越来越受欢迎,动力/效率平衡好 |
| 6S (25.2V) | 1700-2000KV | 最大动力,流行于特技和影视拍摄 |
具有适当低KV电机的高电压系统(6S)通常提供:
- 更高的效率
- 在整个电池放电过程中更一致的动力输出
- 相同功率下更低的电流消耗
- 负载下更小的电压下降
电机性能指标
了解电机性能需要超越规格,查看实际的性能数据。
推力测试解释
推力测试可以测量电机/螺旋桨组合在各种油门水平下产生的实际推力:
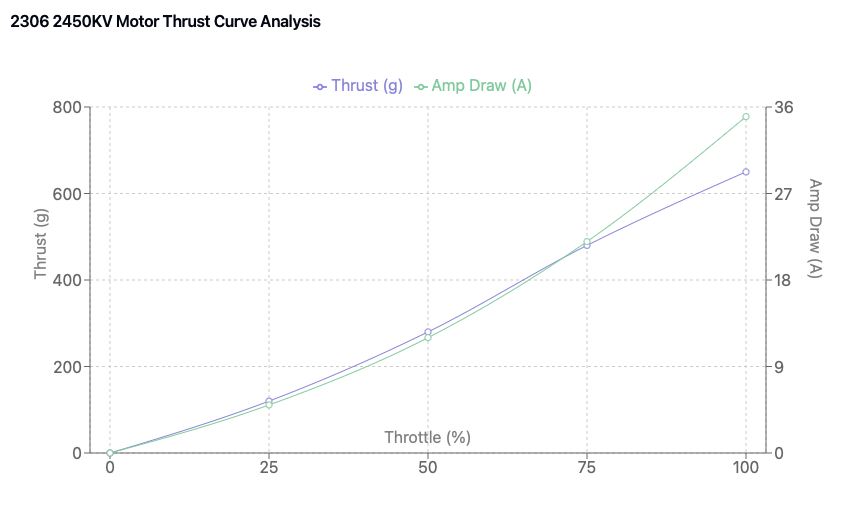
推力测试的关键指标包括:
- 最大推力:100%油门时产生的最大推力
- 推力曲线:推力随油门输入线性增加的程度
- 效率:每瓦特功耗产生的推力
- 电流消耗:不同油门水平下的电流消耗
我自己搭建了推力测试平台,测试结果经常与厂商声称的不符。一些宣传为"高推力"的电机实际产生的推力比更普通的电机还要低,但运行温度却高得多。
解读推力数据图表
在检查推力测试数据时:
- 不要只看最大推力 - 一个产生略低峰值推力但具有更线性推力曲线的电机通常能提供更好的操控性。
- 考虑典型油门位置的推力 - 大多数飞行发生在20-60%的油门范围内,因此这个范围内的性能比最大推力更重要。
- 比较效率 - 两个电机可能产生相似的推力,但如果其中一个的电流消耗明显更低,它将提供更长的飞行时间。
- 检查温升 - 过高的温度表明效率低下,可能影响寿命。
效率考虑因素
电机效率(每瓦特推力)在整个油门范围内有所不同:
- 大多数电机在30-60%油门时效率最高
- 在非常低和非常高的油门下,效率显著下降
- 更大的定子往往在使用更大螺旋桨时效率更高
- 更高KV的电机通常牺牲一些效率来换取响应性
对于长航时机型,我优先选择在30-50%油门范围内保持良好效率的电机,因为这是无人机大部分飞行时间所处的油门范围。
温度管理
电机温度是判断匹配和设置是否合适的关键指标:
- 正常工作温度:摸起来温热但不会不舒服(40-60°C)
- 警示范围:摸起来太热不舒服(60-80°C)
- 危险区域:根本摸不了(80°C以上)
影响电机温度的因素:
- KV值(KV值越高 = 热量越大)
- 螺旋桨尺寸和螺距(越激进 = 热量越大)
- 飞行风格(激烈的动作 = 热量越大)
- 环境温度
- 冷却气流
我养成了每次飞行后触摸电机的习惯——这是一个简单的检查,通过在故障发生前提醒我潜在的问题,使我免于损坏许多电机。
噪音特性
电机噪音可以表明性能特点:
- 平稳、低沉的声音:通常表示运行高效
- 高频尖啸:可能表示转速非常高,可能达到极限
- 研磨或不均匀的声音:可能表示轴承问题或不平衡
- 在某些油门位置出现共振:可能表示存在振动问题
除了令人讨厌之外,过度噪音通常与低效率相关,并可能表示潜在问题。
高级电机概念
对于那些希望进一步优化性能的人来说,这些高级概念可以帮助微调电机选择和设置。
气隙优化
气隙是定子和磁铁之间的距离:
- 较小的气隙:更强大、响应更快,但可能效率较低
- 较大的气隙:效率更高,运行温度更低,但功率较小
高级电机通常具有精确优化的气隙,可在性能和效率之间取得平衡。
轴承类型和质量
轴承是影响性能和寿命的关键组件:
- 标准轴承:适合休闲飞行
- 密封轴承:更好地防尘防潮
- 陶瓷轴承:摩擦力小,寿命更长,成本更高
- 混合轴承:陶瓷球与钢制轴承座,性能和成本平衡良好
我发现,与预算电机中常见的普通中国轴承相比,升级到优质日本轴承(即使是标准钢制轴承)在电机平稳性和寿命方面也有明显差异。
铃罩设计和材料
铃罩设计影响重量、冷却和耐用性:
- 标准铃罩:通常为铝制,重量和强度平衡良好
- 轻量化铃罩:使用更薄的材料或开孔以减轻重量
- 冷却设计:额外的开孔或散热片以改善气流
- 材料变化:一些高级电机使用钛、镁合金或碳纤维组件
单面与双面磁通设计
电机设计在磁通模式上有所不同:
- 单面磁通:磁铁仅在铃罩外缘,重量更轻但功率较小
- 双面磁通:磁铁在铃罩顶部和侧面,功率更大但重量更重
双面设计在高级电机中越来越常见,特别是在较大尺寸中,因为它们具有性能优势。
空心轴与实心轴设计
电机轴有两种主要设计:
- 实心轴:传统设计,最大强度
- 空心轴:重量更轻,对大多数应用来说强度足够,冷却更好
对于竞速和自由式飞行,我发现由于旋转质量减小,空心轴设计在响应性方面有明显改善。
弧形磁铁与直磁铁
磁铁形状影响性能特点:
- 直磁铁:传统设计,更易于制造
- 弧形磁铁:弯曲以匹配铃罩圆周,可能更高效
一些制造商声称使用弧形磁铁可提高5-10%的效率,尽管实际效果各不相同。
线规和绕组技术
绕组规格影响性能:
- 线规:较粗的线(规格数字较小)可以承载更多电流,但适合定子的匝数更少
- 绕组技术:手工绕制与机器绕制会影响一致性和性能
- 填充系数:铜在定子中利用空间的效率
高级电机通常宣传"高密度绕组",具有更好的填充系数,从而获得更多的铜质量和更好的性能。
安装和设置
正确的安装对于电机的最佳性能和寿命至关重要。
正确的安装技术
安装电机时:
- 使用合适的螺丝 - 太长可能接触绕组,太短无法正确固定
- 涂抹螺纹锁固剂 - 中等强度(蓝色)螺纹锁固剂可防止振动松动
- 检查是否卡滞 - 确保安装后铃罩可自由旋转
- 验证对齐 - 电机应与机臂完全垂直

我曾经因为振动导致螺丝松动,在飞行中途丢失了一个电机,从而艰难地认识到正确安装的重要性。现在我在每次飞行前都会检查电机安装。
线材管理
正确的布线可防止损坏和干扰:
- 剪至适当长度 - 多余的线会增加重量并可能被障碍物钩住
- 远离螺旋桨布线 - 即使有桨保护罩,电线也可能被切断
- 固定在机架上 - 防止振动和移动
- 考虑电调位置 - 较短的电机线可减少电阻和重量

电机方向和螺旋桨方向
FPV四轴飞行器通常使用"螺旋桨向内"或"螺旋桨向外"的配置:
- Props-in: 螺旋桨向内旋转在四轴飞行器的前面
- 前飞时操控性更好
- 前飞时效率更高
- 竞速的标准
- Props-out: 螺旋桨向外旋转在前面
- 偏航力矩更大
- 降低螺旋桨洗涤效应
- 特技飞行很流行
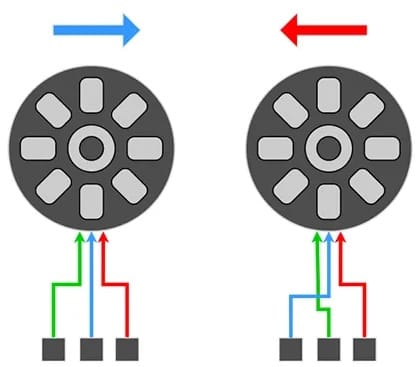
电机方向在飞控软件中设置,并通过连接到电调的线序来确定。
电调匹配注意事项
为获得最佳性能,电机和电调应匹配:
- 电流额定值:电调的额定电流应至少达到电机的最大电流
- 响应速度:高质量电调提供更快、更精确的电机控制
- 协议支持:现代电调应支持DShot600或更高,以获得最佳性能
- 遥测能力:具有遥测功能的电调可提供有关电机性能的宝贵数据
最佳焊接实践
良好的焊接对于可靠的电力传输至关重要:
- 使用足够的热量 - 标准烙铁的温度为350-380°C
- 预镀锡线和焊盘 - 使最终连接更容易
- 使用优质焊料 - 60/40或63/37含铅焊料最适合电机连接
- 保持接头清洁 - 避免可能导致短路的过多焊料
- 使用合适的线规 - 5英寸四轴电机标配20AWG,大型机架使用18AWG
不良焊接是我见过的最常见的性能问题和故障原因之一。我曾花费数小时排查不稳定行为,最后发现是电机线上的一个冷焊点导致的。
维护与故障排除
正确的维护可延长电机寿命并防止故障。
轴承维护
轴承通常是最先出现故障的部件:
- 定期清洁 - 在肮脏环境中飞行后清除灰尘和碎屑
- 适当润滑 - 一滴轻质油可延长轴承寿命
- 避免接触水 - 如果电机被打湿,要彻底干燥
- 留意噪音变化 - 噪音增大通常表示轴承磨损
我通过简单更换轴承,让无数"报废"的电机重获新生——如果你对这个爱好很认真,这是一项值得学习的技能。
识别损坏的电机
电机损坏的常见迹象包括:
- 物理损坏:轴弯曲、铃罩开裂或绕组损坏
- 电气问题:相间或对地短路
- 性能问题:功率降低、过热或振动
- 异常声音:磨损、咔嗒声或不一致的噪音
常见故障点
了解典型的故障模式有助于预防:
- 轴承 - 通常是最先出现故障的部件
- 绕组 - 可能因过热或物理撞击而损坏
- 磁铁 - 可能因撞击或过热而开裂、移位或退磁
- 轴 - 可能因坠机或硬着陆而弯曲
- 铃罩 - 可能因撞击而开裂或失衡
清除碎屑和清洁
定期维护可防止问题:
- 清除可见碎屑 - 检查铃罩周围是否缠绕头发、线或植物
- 压缩空气清洁 - 吹出灰尘和小颗粒
- 检查污染 - 查看绕组上是否有油或污垢
- 检查腐蚀 - 特别是在海水附近飞行后
轴矫正技巧
略微弯曲的轴有时可以修复:
- 找出弯曲点 - 在平面上滚动电机以找到最高点
- 轻轻施压 - 使用带保护的电机工具或钳子轻轻施压
- 经常测试 - 经常检查进度以避免过度矫正
- 知道何时更换 - 有些弯曲太严重,无法可靠修复
我成功矫正了许多电机轴,但这是一个精细的过程——用力过大会使问题恶化。
何时修理与更换
决策指南:
- 如果以下情况则更换:
- 绕组损坏
- 多个磁铁松动或损坏
- 轴严重弯曲
- 铃罩开裂或严重损坏
- 如果以下情况则考虑修理:
- 只有轴承磨损
- 轴略微弯曲
- 单个磁铁松动但未损坏
- 性能问题较小
专业提示和专家见解
经过多年构建、比赛和修理无人机,我收集了一些超出规格的见解。
微调电机性能
- 平衡螺旋桨 - 即使是工厂螺旋桨也能从平衡中受益
- 检查并消除振动 - 它们会降低性能并导致过早磨损
- 考虑电机正时 - 调整电调正时可以微调电机响应
- 仔细匹配电机 - 使用同一批次的电机以获得最佳效果
- 磨合期 - 有些电机在飞行几次后性能会更好,以便轴承就位
自定义改装
对于愿意尝试的人:
- 轴承升级 - 用优质选件替换原厂轴承
- 自定义铃罩改装 - 一些飞手会钻战略冷却孔
- 轴升级 - 用钛合金替换轴以提高耐用性
- 自定义平衡 - 超越工厂平衡以获得最大性能
- 绕组改装 - 高级用户可以重绕电机以获得特定特性
竞速秘诀
竞速选手经常:
- 电机下倾 - 将电机略微向后倾斜可提高前飞效率
- 使用更轻的铃罩 - 牺牲一些耐用性以提高响应性
- 在边缘运行电机 - 接受更短的寿命以获得最大性能
- 将电机与赛道匹配 - 技术型赛道和高速赛道使用不同的电机
- 失步调整 - 仔细调整电调参数以防止失步问题
长寿命优化
为了最大限度延长电机寿命:
Here is the translated content with the original HTML formatting preserved and URLs transformed according to the rules:
- 大多数飞行时保持油门低于80%
- 激进飞行之间留出冷却时间
- 定期检查温度
- 坠机后检查和清洁
- 小心存放 - 避免潮湿和极端温度
未来电机技术趋势
展望未来,我们可以期待:
- 进一步集成 - 电机/电调/螺旋桨组合系统
- 智能电机,集成传感器和遥测功能
- 新材料,更轻的重量和更好的散热性能
- 通过设计和材料改进提高效率
- 针对新兴无人机类别的专业化设计
常见问题:关于无人机电机的常见问题
我如何知道我的无人机应该使用什么尺寸的电机?
从机架尺寸和预期用途开始。对于标准的5英寸自由式四轴飞行器,2207或2306电机是非常好的全能选择。对于竞速,可以考虑稍小的2205或2206电机。对于3英寸以下的微型机架,可以考虑1303-1404尺寸的电机。将电机与机架尺寸和你的飞行风格相匹配——竞速需要更高的KV,自由式飞行受益于中等KV,而长航时/电影拍摄的构建最适合使用低KV电机。
电机KV实际上是什么意思?
KV(千伏)表示在没有负载的情况下,每施加一伏电压,电机理论上会转动的RPM(每分钟转数)。一个2400KV的电机在使用4S电池16.8V(完全充电)供电时,理论上在没有螺旋桨的情况下会以40,320 RPM的速度旋转。在实践中,由于螺旋桨的负载和其他低效率,实际RPM会更低。更高的KV意味着更快的旋转但扭矩更小,而更低的KV提供更大的扭矩但最大旋转速度更慢。
电机轴承有多重要?
非常重要——轴承通常是电机中最先出现故障的部件。优质轴承提供更平稳的运行、更高的效率和更长的使用寿命。如果你的电机发出磨砂声或用手转动电机外壳时感觉粗糙,轴承可能已经磨损。对于严肃的飞行员来说,升级到日本或欧洲轴承可以显著提高电机的使用寿命。
我可以在同一架无人机上混合使用不同的电机吗?
虽然从技术上讲是可能的,但不建议这样做。不同的电机,即使是相同尺寸和KV的电机,也可能具有略微不同的性能特点。这可能会造成操控不平衡,并使调试变得困难。如果你必须更换一个损坏的电机,尽量获得同一批次生产的完全相同型号的电机。
我如何知道我的电机是否适合我的机架?
飞行后,检查电机温度。它们应该是温暖的,但不会烫手(理想情况下低于60°C)。如果它们非常热,你的电机可能不适合你的机架,或者你使用的螺旋桨太激进。此外,观察你的悬停油门位置——理想情况下,你的无人机应该在大约30-40%的油门下悬停。如果你需要明显更多的油门来悬停,你的电机可能太小或性能不佳。
电机尺寸和KV等级哪个更重要?
两者都很重要,但用途不同。电机尺寸(定子尺寸)决定了功率潜力和扭矩,而KV决定了如何以RPM与扭矩的形式输出该功率。对于给定的电池电压,更高的KV意味着更高的RPM但扭矩更小,而更大的定子尺寸意味着更大的总功率能力。将两者都与你的具体要求相匹配——自由式四轴飞行器可能使用2207 2300KV电机,而长航时机架可能更喜欢2507 1700KV电机。
电机应该多久更换一次?
如果适当保养,优质电机可以使用数百次飞行。在以下情况下更换电机:
- 即使在维护后,轴承也会变得嘈杂或粗糙
- 性能明显下降
- 绕组损坏
- 轴弯曲到无法修复
- 电机外壳破裂或损坏
- 磁铁松动或损坏
许多问题都可以通过更换轴承来解决,这比更换整个电机要经济得多。
昂贵的电机真的比预算选项性能更好吗?
在许多情况下,是的,但收益递减。从预算($10)到中端($20)电机通常会在性能、一致性和可靠性方面带来显著改善。然而,中端和高端($30+)电机之间的差异通常更加微妙,可能只有经验丰富的飞行员或在竞争场景中才能察觉到。对于大多数业余爱好者来说,知名制造商的中端电机提供了最佳的性价比。我发现最理想的价格通常在18-25美元之间,在这个价格区间,你可以获得大部分性能优势,而不需要支付溢价。
坠机后我如何判断电机是否损坏?
坠机后,执行以下检查:
- 用手转动电机外壳 - 它应该平稳旋转,没有磨砂声或卡住
- 检查电机外壳、轴或底座是否有物理损坏
- 查看是否有暴露的绕组或电线损坏迹象
- 将轴在平面上滚动,确保轴是笔直的
- 检查所有磁铁是否牢固到位
- 在飞行前用非常低的油门输入测试电机
即使电机通过了这些检查,在下一次飞行中也要密切监视它。异常振动、发热或噪音可能表明存在隐藏的损坏。
电机的"N"和"P"版本有什么区别?
一些制造商提供同一电机的普通("N")和动力("P")版本。"P"版本通常具有更激进的绕组配置,旨在实现最大功率输出,通常以牺牲效率为代价。它们用于竞速和极限自由式飞行,在这些情况下,最大推力优先于飞行时间。对于大多数飞行员来说,标准的"N"版本在性能和效率之间提供了更好的平衡。
结论
为你的FPV无人机选择合适的电机是构建过程中最重要的决定之一。完美的电机不一定是最强大或最昂贵的——它是最能满足你特定要求、飞行风格和其他组件的电机。
对于初学者,我建议从知名制造商的标准尺寸(用于5英寸自由式四轴飞行器的2306或2207,KV值为1800-2300)的中端电机开始。随着你的技能和偏好的发展,你可以尝试更专业的选择,以适应你不断发展的飞行风格。
请记住,电机性能只是复杂系统的一部分。最好的电机如果与不匹配的螺旋桨、不充分的电调或糟糕的调试搭配,也不会表现良好。对你的机架采取整体方法,确保所有组件和谐地协同工作。
FPV电机领域继续快速发展,制造商不断在功率、效率和可靠性方面挑战可能的极限。通过理解本指南中涵盖的基本原理和规格,你将有能力应对这些变化,并为你的机架做出明智的决定。
无论你是在制造你的第一架无人机还是第五十架无人机,我希望这份指南能帮助你找到完美的电机来匹配你的飞行梦想。飞行愉快!
参考资料和延伸阅读
外部资源
- Miniquad Test Bench - 全面的电机测试数据
- Joshua Bardwell 的 YouTube 频道 - 详细的电机解释和教程
- eCalc 电机计算器 - 用于估算不同螺旋桨和电池下电机性能的工具


