Motores de Drone: Seleção, Desempenho e Otimização
Os motores são o coração pulsante de qualquer drone FPV, influenciando diretamente tudo, desde o tempo de voo e agilidade até a velocidade máxima e as características de manuseio. Depois de construir centenas de drones e testar inúmeras combinações de motores ao longo dos anos, aprendi que a seleção do motor é tanto uma arte quanto uma ciência - uma que pode fazer ou quebrar sua experiência de voo. Este guia abrangente irá orientá-lo sobre tudo o que você precisa saber sobre motores de drone FPV, desde os princípios básicos até as técnicas avançadas de otimização.
Introdução aos Motores de Drone FPV
Os drones FPV (First Person View) dependem de motores elétricos sem escova para gerar o impulso necessário para o voo. Esses motores convertem energia elétrica da bateria em rotação mecânica, que aciona as hélices para criar sustentação e manobrabilidade.
Os motores que você escolher definirão fundamentalmente o caráter do seu drone:
- Potência e impulso determinam sua aceleração e velocidade máxima
- Peso afeta a agilidade e o tempo de voo
- Taxa de resposta influencia a precisão e o controle de manuseio
- Eficiência impacta a duração da bateria e a duração do voo
- Durabilidade determina o quão bem eles sobrevivem a quedas e pousos difíceis
Seja você estiver construindo seu primeiro drone ou otimizando seu décimo equipamento de corrida, entender a tecnologia dos motores é essencial para criar uma configuração que corresponda aos seus objetivos de voo.
História e Evolução dos Motores de Drone
O desenvolvimento de motores para drones representa uma fascinante jornada de inovação tecnológica que permitiu o hobby moderno de FPV como conhecemos hoje.
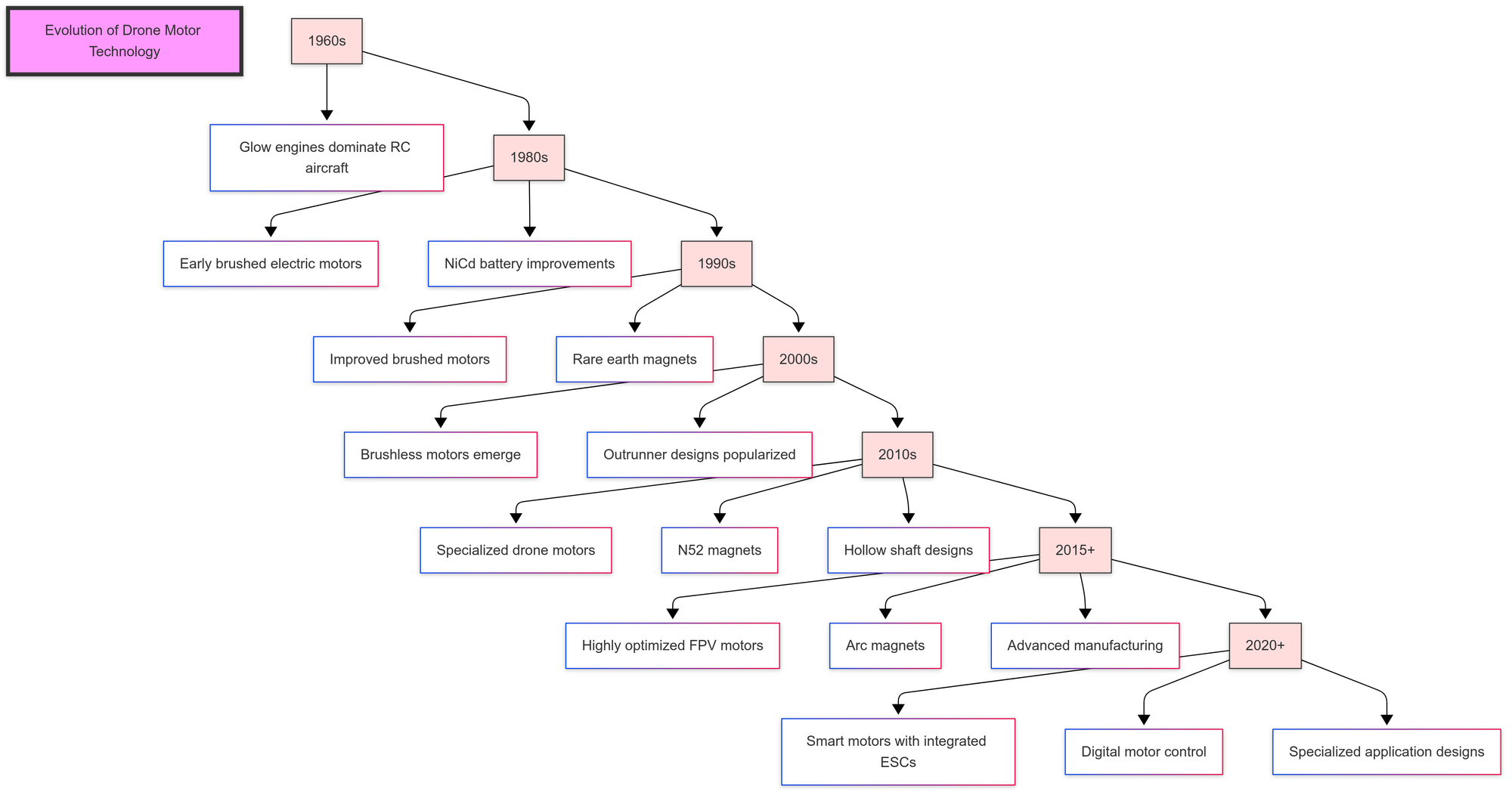
Primeiros Motores RC (1960-1990)
As primeiras aeronaves de controle remoto usavam motores a combustão (motores de combustão interna em miniatura) ou motores elétricos com escovas:
- 1960-1970: Motores a combustão dominavam as aeronaves RC, com opções elétricas limitadas
- 1980: Os primeiros motores com escovas se tornaram mais viáveis com melhorias nas baterias de NiCd
- 1990: Motores com escovas de maior qualidade com ímãs de terras raras melhoraram o desempenho
Esses primeiros sistemas elétricos eram pesados, ineficientes e limitados em potência, tornando o voo acrobático verdadeiro difícil.
Revolução dos Motores Brushless (2000)
O início dos anos 2000 viu o surgimento de motores brushless para aplicações de RC:
- 2000-2005: Primeiros motores brushless e ESCs comercialmente viáveis
- 2005-2010: Designs outrunner (onde o sino gira em torno do estator) se tornaram populares por seu maior torque
- 2007-2010: Helicópteros RC impulsionaram a inovação no design e controle de motores
Esses primeiros motores brushless foram projetados principalmente para aeronaves de asa fixa e helicópteros, não para os drones multirrotores que conhecemos hoje.
A Era Multirrotor (2010-2015)
A explosão dos drones multirrotores criou demanda por motores especializados:
- 2010-2012: Primeira geração de motores dedicados a multirrotores (designs grandes e pesados)
- 2012-2013: Introdução do formato de tamanho comum "22XX"
- 2013-2014: Técnicas de fabricação aprimoradas reduziram o peso
- 2014-2015: Ímãs N52 se tornaram padrão, melhorando significativamente a densidade de potência
Eu vi alguns motores "de alto desempenho" dessa época - eles eram considerados poderosos na época, mas seriam ridiculamente pesados e com pouca potência pelos padrões de hoje.
Desenvolvimento Moderno de Motores FPV (2015-Presente)
Os últimos anos viram um rápido avanço na tecnologia de motores especificamente para aplicações FPV:
- 2015-2017: Motores de corrida especializados com designs leves
- 2017-2018: Introdução de eixos de titânio e designs avançados de sino
- 2018-2019: Ímãs de arco e folgas de ar otimizadas para eficiência
- 2019-2020: Designs ultraleves com durabilidade aprimorada
- 2020-Presente: Motores inteligentes com ESCs integrados e sistemas de controle digital
A taxa de inovação tem sido notável - os motores se tornaram simultaneamente mais leves, mais potentes, mais eficientes e mais duráveis em um período relativamente curto.
Fundamentos dos Motores Brushless
Motores Brushless vs. Motores com Escovas
As primeiras aeronaves RC usavam motores com escovas, que têm escovas físicas que fazem contato com um comutador para criar rotação. Embora simples e baratos, esses motores sofrem de:
- Menor eficiência
- Vida útil reduzida devido ao desgaste das escovas
- Densidade de potência limitada
- Maiores requisitos de manutenção
Os drones FPV modernos usam motores DC sem escovas (BLDC), que eliminam as escovas físicas em favor da comutação eletrônica. Esse avanço traz:
- Maior eficiência (80-90% vs. 50-60% para motores com escovas)
- Vida útil mais longa (sem escovas para desgastar)
- Melhor relação potência-peso
- Melhor dissipação de calor
- Menores requisitos de manutenção
Componentes do Motor Brushless
Entender os componentes físicos de um motor brushless ajuda a avaliar a qualidade e a adequação para diferentes aplicações:
- Sino (Rotor): A parte externa rotativa que segura os ímãs e se conecta à hélice.
- Estator: O núcleo interno estacionário com enrolamentos de cobre. O tamanho do estator é uma especificação chave (mais sobre isso depois).
- Ímãs: Normalmente feitos de ligas de neodímio (N52, N54, etc.), eles criam o campo magnético que interage com os enrolamentos do estator.
- Enrolamentos: Fio de cobre enrolado em torno dos polos do estator em padrões específicos (configuração Delta ou Estrela).
- Rolamentos: Suportam o sino rotativo e reduzem o atrito. Rolamentos de qualidade são cruciais para longevidade e desempenho.
- Eixo do Motor: Conecta o sino aos rolamentos e se estende para montar a hélice.
- Base/Montagem: A parte inferior com furos de montagem para fixar o motor ao frame do drone.
Como Funcionam os Motores Sem Escova
Os motores sem escova operam com base em princípios eletromagnéticos:
- O ESC (Controlador Eletrônico de Velocidade) envia pulsos elétricos precisamente cronometrados para os enrolamentos do motor
- Esses pulsos criam campos eletromagnéticos no estator
- Os campos eletromagnéticos interagem com os ímãs permanentes no sino
- Essa interação cria força rotacional (torque)
- O ESC ajusta continuamente o tempo e a força desses pulsos para controlar a velocidade e direção
Essa comutação eletrônica é o que torna os motores sem escova tão eficientes e responsivos. Quando estou voando em uma pista técnica apertada, posso sentir a resposta imediata de uma combinação de motor/ESC de qualidade—praticamente não há atraso entre o comando do stick e a reação do motor.
Entendendo as Especificações do Motor
Decifrar as especificações do motor é essencial para fazer escolhas informadas. Vamos analisar os principais parâmetros:
Designação de Tamanho do Motor
Os motores FPV são normalmente rotulados com um número de quatro dígitos, como 2207 ou 2306. Essa notação indica as dimensões físicas do estator:
- Primeiros dois dígitos: Largura do estator (diâmetro) em mm
- Últimos dois dígitos: Altura do estator em mm
Por exemplo, um motor 2207 tem um estator que é 22mm de largura e 7mm de altura.
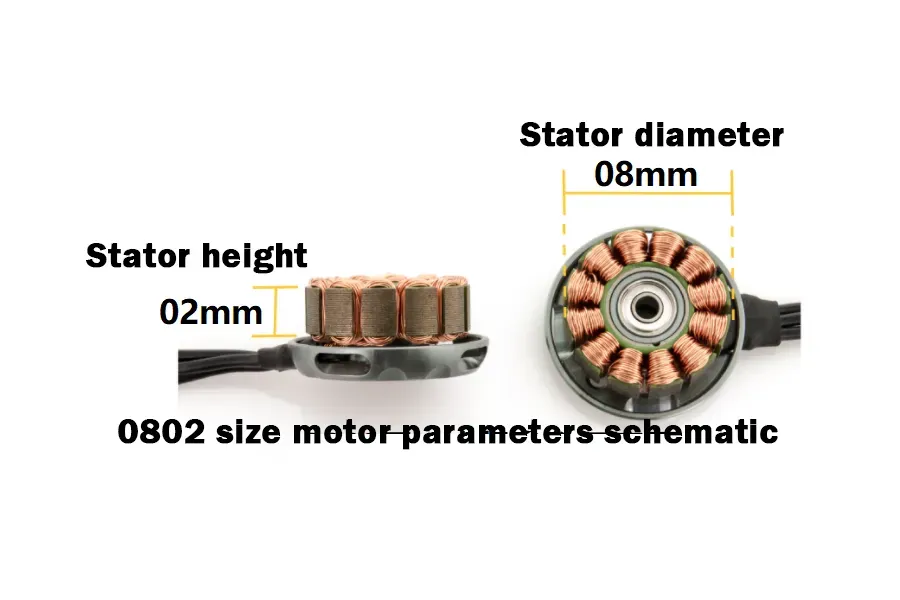

Geralmente:
- Maior largura do estator = mais torque
- Maior altura do estator = mais potência e desempenho máximo\
Na minha experiência, a diferença entre um estator de 22mm e 23mm de largura pode parecer pequena no papel, mas pode transformar completamente a sensação de um drone em voo. Meu freestyle 2207 tem uma resposta notavelmente mais rápida do que meu setup 2306 idêntico, que parece mais suave e linear na entrega de potência.
Classificação KV
KV (Kilo-Velocidade) representa o RPM (rotações por minuto) teórico que o motor girará por volt aplicado sem carga:
- Um motor 2400KV em uma bateria 4S (16.8V totalmente carregada) teoricamente giraria a 40.320 RPM (2400 × 16.8) sem uma hélice
Na prática, o RPM real será menor devido à carga e ineficiências. A classificação KV tem implicações significativas:
- KV mais alto (2400KV+): Mais velocidade máxima, resposta mais rápida, mais adequado para corrida e hélices menores
- KV médio (1700-2300KV): Desempenho equilibrado, bom para freestyle e voo geral
- KV mais baixo (1300-1600KV): Mais torque, melhor eficiência, adequado para hélices maiores e voos de longa distância
Um erro que cometi no início da minha jornada FPV foi sempre escolher os motores com o KV mais alto disponível, pensando que "mais rápido é melhor". Rapidamente aprendi que motores de KV ultra alto em um quad freestyle o tornavam instável e difícil de voar suavemente, sem mencionar o tempo de voo drasticamente reduzido.
Impacto do Tamanho do Estator
O tamanho do estator afeta diretamente o desempenho do motor:
| Tamanho do Estator | Caso de Uso Típico | Características |
|---|---|---|
| 1105-1306 | Micro quads (2-3") | Leve, menor potência, eficiente |
| 1407-1506 | Mini quads (3-4") | Bom equilíbrio de peso e potência |
| 2004-2206 | Quads de tamanho médio (4-5") | Responsivo, bom para voo técnico |
| 2207-2306 | Quads 5" padrão | Poderosos e versáteis |
| 2407-2507 | Freestyle pesado/cinematográfico | Potência máxima, suporta cargas pesadas |
| 2807-2912 | Longo alcance 7"+ | Alto torque para hélices grandes |
Estatores maiores podem produzir mais potência, mas adicionam peso. O ponto ideal depende do tamanho do frame, bateria e estilo de voo.
Força e Tipos de Ímãs
Os ímãs são classificados por sua força, com números mais altos indicando maior força magnética:
- N48: Força padrão
- N52: Forte, comum em motores de média potência
- N54/N55: Muito forte, encontrado em motores premium
Ímãs mais fortes fornecem mais torque e capacidade de resposta, mas podem reduzir a eficiência e aumentar a temperatura do motor. Alguns fabricantes usam ímãs em arco (curvados para corresponder à circunferência do sino) em vez de ímãs retos tradicionais, alegando melhor eficiência.
Depois de queimar vários motores com ímãs mais fracos que se desmagnetizaram após quedas fortes, descobri que investir em motores com ímãs N52 ou melhores compensa em longevidade, especialmente para voos freestyle onde os impactos são inevitáveis.
Configurações de Enrolamento
Os enrolamentos do motor podem ser organizados em diferentes padrões:
- Delta: Três conexões, geralmente mais potente em RPMs mais altas
- Wye (Estrela): Três conexões com um tap central, normalmente mais eficiente em RPMs mais baixas
A maioria dos motores FPV usa enrolamentos Delta por suas características de desempenho, mas alguns fabricantes experimentam padrões de enrolamento híbridos ou modificados para objetivos de desempenho específicos.
Considerações de Peso
O peso do motor é um fator crítico que afeta:
- Características de voo: Motores mais leves significam manuseio mais ágil
- Peso total: Impacta o tempo de voo e o desempenho
- Massa rotacional: Afeta a capacidade de resposta às mudanças de aceleração
Os motores modernos têm ficado mais leves mantendo a potência, com opções premium usando eixos de titânio e sinos de liga de alumínio/magnésio para reduzir o peso sem sacrificar a resistência.
Capacidades de Manuseio de Potência
A capacidade de um motor de lidar com potência é normalmente medida em watts e é determinada por:
- Massa de cobre nos enrolamentos
- Capacidade de dissipação de calor
- Qualidade de construção
Os fabricantes geralmente fornecem especificações como "potência contínua máxima" e "potência de pico", embora estas devam ser consideradas como diretrizes e não limites absolutos.
Aprendi a ser cético em relação a alegações de potência depois de ver um motor supostamente "capaz de 1200W" derreter após apenas 30 segundos a cerca de 800W durante um teste de bancada. Motores de qualidade de fabricantes renomados tendem a ser mais conservadores em suas classificações.
Guia de Seleção de Motores
Escolher os motores certos envolve combinar suas características com seu build específico e objetivos de voo.
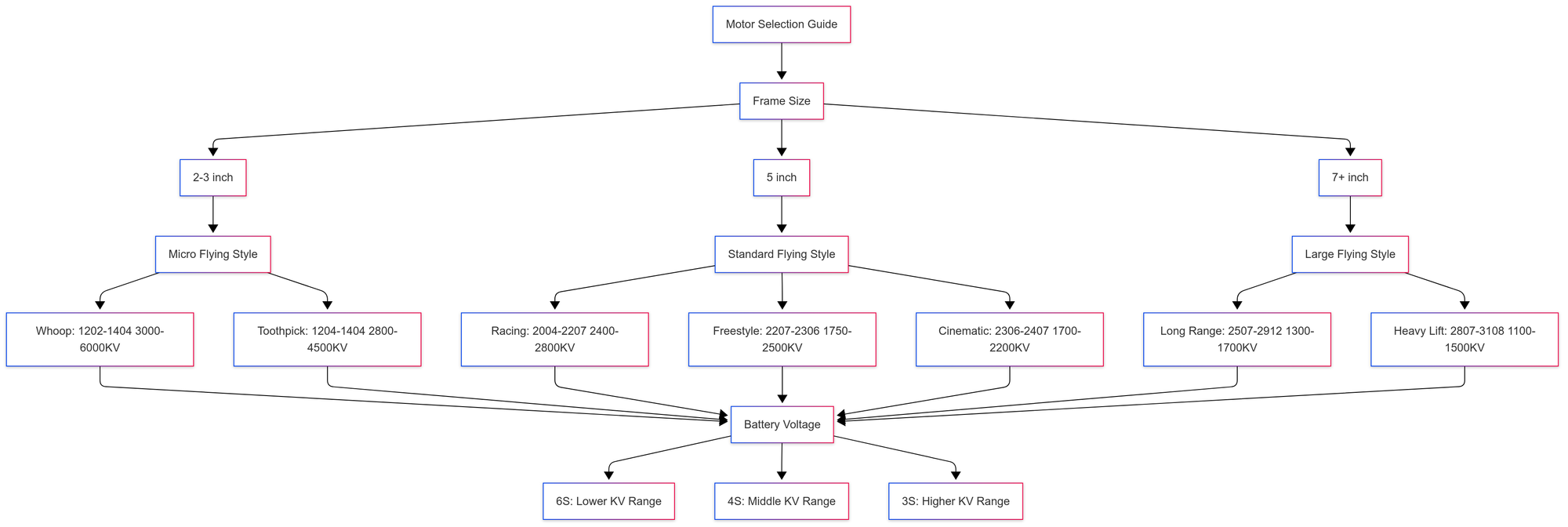
Combinando Motores com o Tamanho do Frame
O tamanho do frame determina em grande parte as escolhas apropriadas do motor:
| Tamanho do Frame | Tamanhos de Motor Recomendados | Faixa Típica de KV |
|---|---|---|
| 2-3" Micro | 1105-1306 | 3000-6000KV |
| 3" Toothpick | 1204-1404 | 2800-4500KV |
| 3.5" Cinewhoop | 1404-1506 | 2600-3600KV |
| 4" Leve | 1606-2004 | 2400-3200KV |
| 5" Freestyle | 2205-2306 | 1750-2500KV |
| 5" Racing | 2004-2207 | 2400-2800KV |
| 6" Freestyle | 2306-2407 | 1600-2000KV |
| 7"+ Longo Alcance | 2507-2912 | 1300-1700KV |
Estes são pontos de partida—seus requisitos específicos podem exigir variações dessas recomendações.
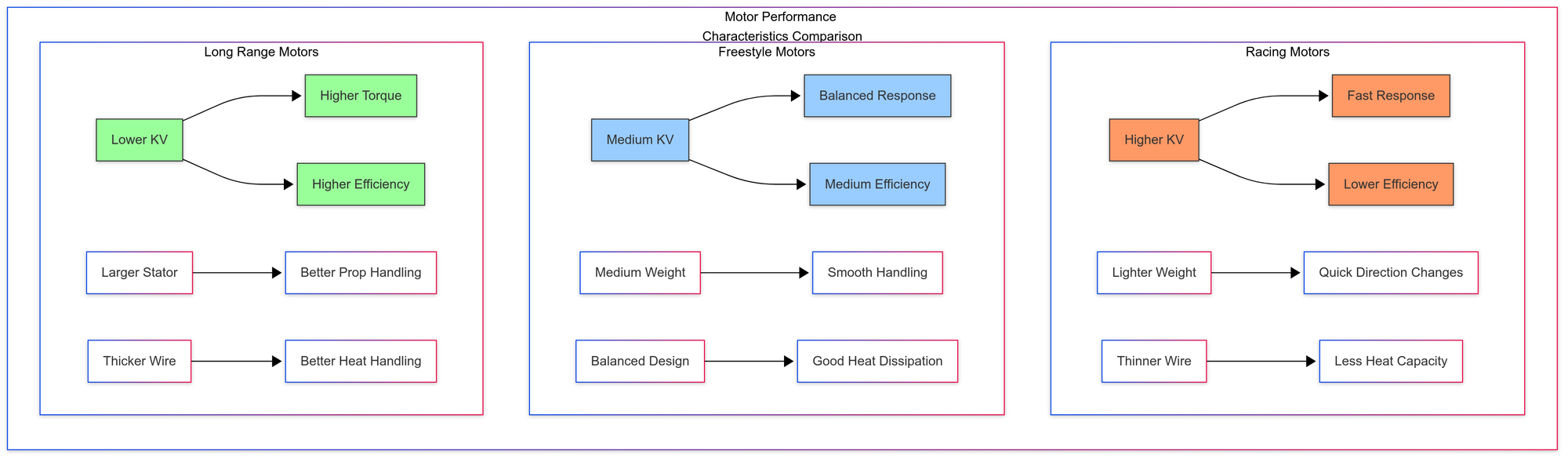
Considerações para Diferentes Estilos de Voo
Diferentes estilos de voo exigem características diferentes do motor:
Racing
- Prioridade: Velocidade, aceleração, capacidade de resposta
- Recomendado: Menor peso, maior KV (2400-2800KV para 5")
- Tamanho do estator: Geralmente diâmetro um pouco menor, mas mais alto (por exemplo, 2207)
- Notas: Motores de corrida priorizam desempenho de pico sobre durabilidade e eficiência
Descobri que builds dedicados a corridas se beneficiam de motores com peso e inércia um pouco menores, mesmo à custa de alguma potência. A capacidade de mudar de direção rapidamente costuma ser mais importante do que o empuxo absoluto em pistas técnicas.
Freestyle
- Prioridade: Entrega de potência suave, durabilidade, boa resolução do acelerador
- Recomendado: KV médio (1800-2300KV para 5")
- Tamanho do estator: Equilibrado (por exemplo, 2306, 2207)
- Notas: Precisa lidar com voos variados, desde cruzeiro suave até manobras agressivas
Para freestyle, prefiro motores com um pouco mais de massa de estator que proporcionam uma resposta mais suave do acelerador e melhor manuseio tanto em movimentos lentos e precisos quanto em manobras de alta potência.
Cinemático/Longo Alcance
- Prioridade: Eficiência, operação suave, confiabilidade
- Recomendado: KV mais baixo (1300-1800KV para 5-7")
- Tamanho do estator: Geralmente maior para torque com hélices grandes (por exemplo, 2407, 2507)
- Notas: Deve equilibrar as necessidades de potência com a eficiência para tempos de voo prolongados
Nos meus builds de longo alcance, descobri que motores ligeiramente superdimensionados funcionando em porcentagens de aceleração mais baixas proporcionam melhor eficiência do que motores menores funcionando em aceleração mais alta. Essa abordagem contra-intuitiva adicionou minutos aos meus tempos de voo.
Micro Builds
- Prioridade: Economia de peso, potência adequada
- Recomendado: KV mais alto (3000-6000KV dependendo do tamanho)
- Tamanho do estator: O menor possível atendendo às necessidades de potência
- Notas: Cada grama importa; mesmo pequenas diferenças de peso são perceptíveis
Relações Potência-Peso
Uma métrica útil para avaliar a adequação do motor é a relação empuxo-peso do build completo:
- Racing: Relação de 12:1 a 15:1 (extremamente responsivo, tempos de voo mais curtos)
- Freestyle: Relação de 8:1 a 12:1 (bom equilíbrio de capacidade de resposta e tempo de voo)
- Cinemático: Relação de 5:1 a 8:1 (voo mais suave, tempos de voo mais longos)
- Longo Alcance: Relação de 3:1 a 5:1 (máxima eficiência, voo estável)
Essas relações representam o empuxo total disponível dividido pelo peso total do drone.
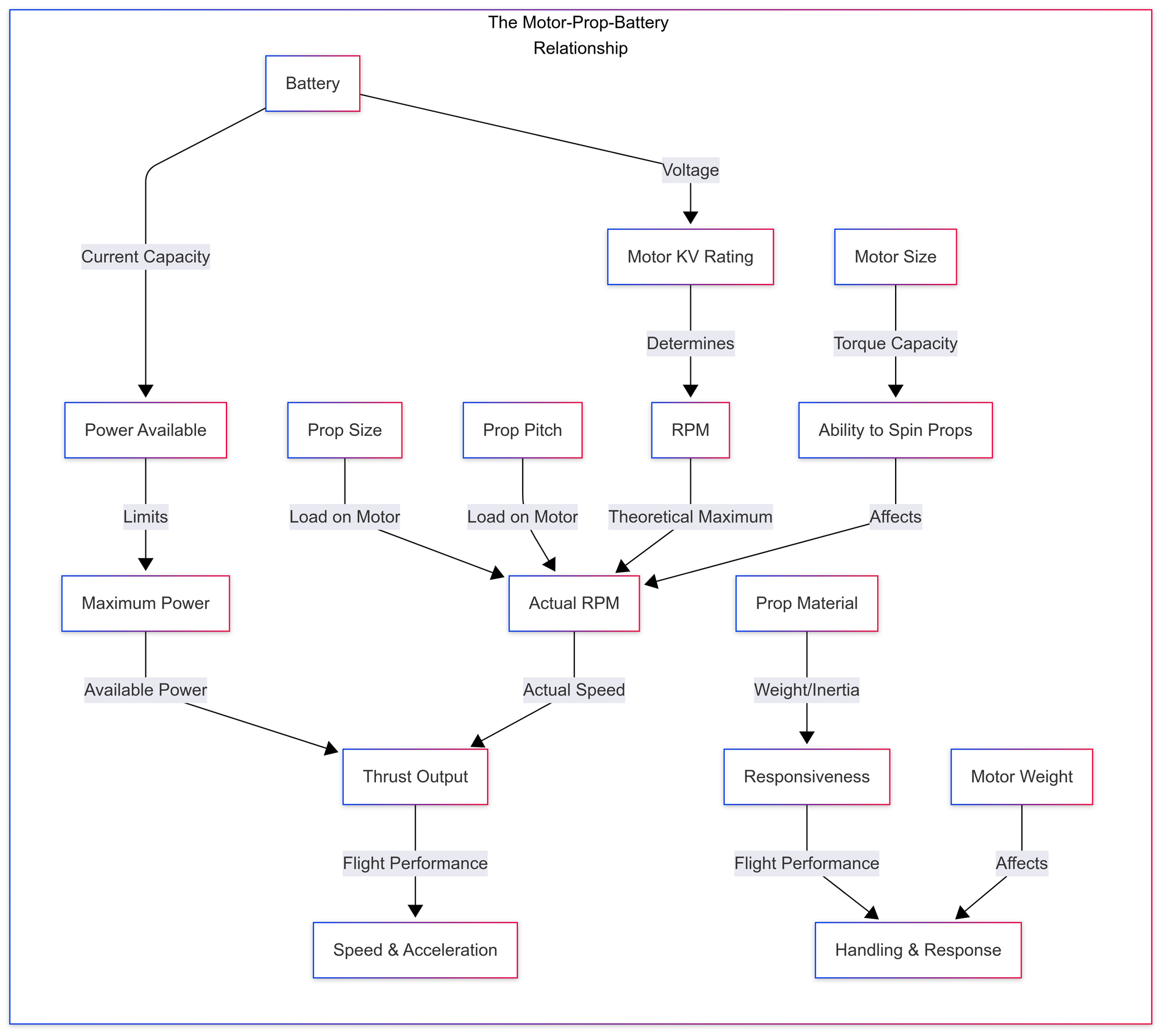
Princípios de Combinação de Motor e Hélice
Motores e hélices devem ser combinados cuidadosamente:
- Hélices maiores exigem motores com mais torque (diâmetro do estator maior)
- Hélices de passo mais alto colocam mais carga nos motores e podem exigir KV mais baixo
- Hélices mais pesadas aumentam a temperatura do motor e reduzem a capacidade de resposta
Uma diretriz geral para quads 5":
- Hélices 5x4x3 (5", 4" de passo, 3 pás): Funcionam bem com motores 2300-2600KV
- Hélices 5x5x3: Melhor combinadas com motores 1900-2300KV
- Hélices 5x4.5x2: Podem usar KV mais alto (2400-2800KV) para corrida
Uma vez tentei usar hélices agressivas 5x4.3x3 em motores de alto KV (2750KV) em 6S, e embora o empuxo fosse incrível, os motores ficaram tão quentes que pude sentir o cheiro deles após um voo de 2 minutos. A combinação adequada é crucial para a longevidade.
Considerações sobre a Tensão da Bateria
O KV do motor deve ser combinado com a tensão da sua bateria:
| Bateria | Faixa de KV para 5" | Notas |
|---|---|---|
| 3S (12.6V) | 2600-3000KV | Menos comum agora, mas ainda usado para algumas construções de corrida |
| 4S (16.8V) | 2300-2600KV | Bom equilíbrio, popular para freestyle |
| 5S (21.0V) | 1900-2300KV | Crescendo em popularidade, bom equilíbrio de potência/eficiência |
| 6S (25.2V) | 1700-2000KV | Potência máxima, popular para freestyle e cinematográfico |
Sistemas de tensão mais alta (6S) com motores de KV mais baixo apropriados geralmente fornecem:
- Melhor eficiência
- Potência mais consistente ao longo da descarga da bateria
- Menor consumo de corrente para a mesma potência de saída
- Menos queda de tensão sob carga
Métricas de Desempenho do Motor
Entender como os motores funcionam requer olhar além das especificações para os dados reais de desempenho.
Explicação dos Testes de Empuxo
Os testes de empuxo medem a força real produzida por uma combinação de motor/hélice em vários níveis de aceleração:
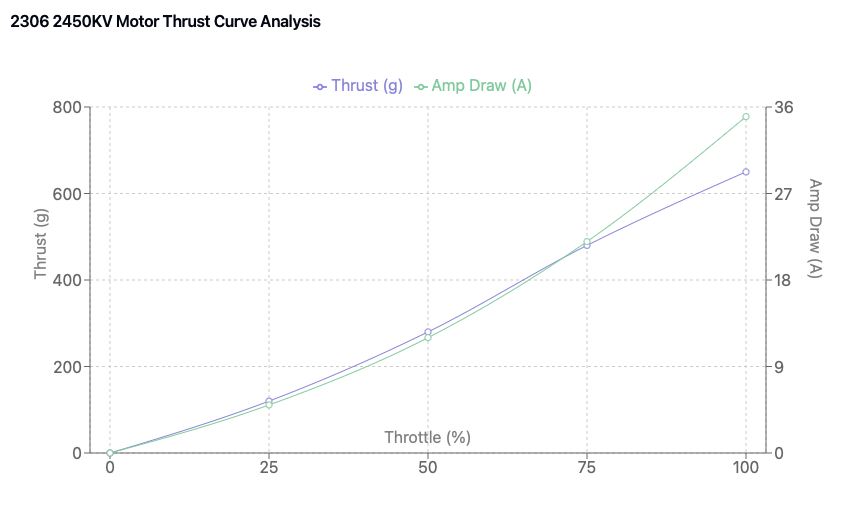
As principais métricas dos testes de empuxo incluem:
- Empuxo máximo: Força máxima produzida a 100% de aceleração
- Curva de empuxo: Quão linearmente o empuxo aumenta com a entrada de aceleração
- Eficiência: Empuxo produzido por watt de potência consumida
- Consumo de corrente: Consumo de corrente em diferentes níveis de aceleração
Eu construí meu próprio equipamento de teste de empuxo, e os resultados geralmente contradizem as alegações dos fabricantes. Alguns motores anunciados como de "alto empuxo" na verdade produzem menos força do que opções mais modestas, mas aquecem significativamente mais.
Interpretando Gráficos de Dados de Empuxo
Ao examinar os dados do teste de empuxo:
- Olhe além do empuxo máximo - Um motor que produz um pouco menos de empuxo máximo, mas tem uma curva de empuxo mais linear, geralmente oferece melhor manuseio.
- Considere o empuxo nas posições típicas de aceleração - A maior parte do voo acontece entre 20-60% de aceleração, então o desempenho nessa faixa é mais importante do que o empuxo máximo.
- Compare a eficiência - Dois motores podem produzir empuxo semelhante, mas se um consome significativamente menos corrente, ele proporcionará tempos de voo mais longos.
- Verifique o aumento de temperatura - Calor excessivo indica ineficiência e possíveis problemas de longevidade.
Considerações sobre Eficiência
A eficiência do motor (empuxo por watt) varia ao longo da faixa de aceleração:
- A maioria dos motores é mais eficiente com 30-60% de aceleração
- A eficiência cai significativamente em acelerações muito baixas e muito altas
- Estatores maiores tendem a ser mais eficientes com hélices maiores
- Motores de KV mais alto normalmente sacrificam alguma eficiência pela capacidade de resposta
Para construções de longo alcance, eu priorizo motores que mantêm boa eficiência na faixa de 30-50% de aceleração, pois é onde o drone passará a maior parte do tempo de voo.
Gerenciamento de Temperatura
A temperatura do motor é um indicador crítico de combinação e configuração apropriadas:
- Temperatura normal de operação: Morno ao toque, mas não desconfortável de segurar (40-60°C)
- Faixa de cautela: Muito quente para tocar confortavelmente (60-80°C)
- Zona de perigo: Muito quente para tocar (80°C+)
Fatores que afetam a temperatura do motor:
- Classificação KV (KV mais alto = mais calor)
- Tamanho e passo da hélice (mais agressivo = mais calor)
- Estilo de voo (manobras agressivas = mais calor)
- Temperatura ambiente
- Fluxo de ar de resfriamento
Desenvolvi o hábito de tocar meus motores após cada voo - é uma verificação simples que me salvou de danificar muitos motores, alertando-me sobre possíveis problemas antes da falha.
Características de Ruído
O ruído do motor pode indicar características de desempenho:
- Som suave e grave: Geralmente indica operação eficiente
- Ruído agudo: Pode indicar RPM muito alto, potencialmente empurrando os limites
- Som de trituração ou irregular: Pode indicar problemas de rolamento ou desequilíbrio
- Ressonância em certas posições do acelerador: Pode indicar problemas de vibração
Além de ser irritante, o ruído excessivo geralmente está correlacionado com ineficiência e pode sinalizar problemas potenciais.
Conceitos Avançados de Motor
Para aqueles que buscam otimizar ainda mais o desempenho, esses conceitos avançados podem ajudar a ajustar a seleção e a configuração do motor.
Otimização da Folga de Ar
A folga de ar é a distância entre o estator e os ímãs:
- Folga menor: Mais potente, mais responsivo, mas potencialmente menos eficiente
- Folga maior: Mais eficiente, funciona mais frio, mas menos potente
Motores premium geralmente apresentam folgas de ar precisamente otimizadas que equilibram desempenho e eficiência.
Tipos e Qualidade de Rolamentos
Os rolamentos são componentes críticos que afetam o desempenho e a longevidade:
- Rolamentos padrão: Adequados para voos casuais
- Rolamentos vedados: Melhor proteção contra poeira e umidade
- Rolamentos de cerâmica: Atrito reduzido, vida útil mais longa, custo mais alto
- Rolamentos híbridos: Esferas de cerâmica com pistas de aço, bom equilíbrio entre desempenho e custo
Descobri que a atualização para rolamentos japoneses de qualidade (mesmo os de aço padrão) faz uma diferença perceptível na suavidade e longevidade do motor em comparação com os rolamentos chineses genéricos encontrados em motores de baixo custo.
Design e Materiais da Campânula
O design da campânula afeta o peso, o resfriamento e a durabilidade:
- Campânulas padrão: Geralmente de alumínio, bom equilíbrio entre peso e resistência
- Campânulas leves: Material mais fino ou recortes para reduzir o peso
- Designs de resfriamento: Recortes ou aletas adicionais para melhorar o fluxo de ar
- Variações de material: Alguns motores premium usam componentes de titânio, ligas de magnésio ou fibra de carbono
Designs de Fluxo Unilateral vs. Bilateral
Os designs dos motores variam em padrões de fluxo magnético:
- Fluxo unilateral: Ímãs apenas na borda externa da campânula, mais leve, mas menos potente
- Fluxo bilateral: Ímãs na parte superior e nas laterais da campânula, mais potente, mas mais pesado
Os designs bilaterais estão se tornando mais comuns em motores premium devido às suas vantagens de desempenho, particularmente em tamanhos maiores.
Designs de Eixo Oco vs. Sólido
Os eixos dos motores vêm em dois designs principais:
- Eixo sólido: Design tradicional, resistência máxima
- Eixo oco: Peso mais leve, resistência adequada para a maioria das aplicações, melhor resfriamento
Para corrida e freestyle, descobri que os designs de eixo oco proporcionam uma melhoria perceptível na capacidade de resposta devido à massa rotacional reduzida.
Ímãs em Arco vs. Ímãs Retos
A forma do ímã afeta as características de desempenho:
- Ímãs retos: Design tradicional, mais fácil de fabricar
- Ímãs em arco: Curvados para corresponder à circunferência da campânula, potencialmente mais eficientes
Alguns fabricantes alegam melhorias de eficiência de 5-10% com ímãs em arco, embora os benefícios no mundo real variem.
Calibre do Fio e Técnicas de Enrolamento
As especificações de enrolamento afetam o desempenho:
- Calibre do fio: Fio mais grosso (número de calibre menor) suporta mais corrente, mas menos voltas cabem no estator
- Técnica de enrolamento: Enrolamento manual vs. enrolamento à máquina afeta a consistência e o desempenho
- Fator de preenchimento: Quão eficientemente o espaço no estator é utilizado pelo cobre
Motores premium geralmente anunciam "enrolamentos de alta densidade" com melhores fatores de preenchimento, resultando em mais massa de cobre e melhor desempenho.
Instalação e Configuração
A instalação adequada é crucial para o desempenho e longevidade ideais do motor.
Técnicas de Montagem Adequadas
Ao montar motores:
- Use parafusos apropriados - Muito longos podem entrar em contato com os enrolamentos, muito curtos não fixarão adequadamente
- Aplique trava-roscas - Trava-roscas de resistência média (azul) evita o afrouxamento por vibração
- Verifique se há obstrução - Certifique-se de que a campânula gire livremente após a montagem
- Verifique o alinhamento - Os motores devem estar perfeitamente perpendiculares aos braços

Aprendi a importância da montagem adequada da maneira mais difícil depois de perder um motor em pleno voo devido a parafusos soltos por vibração. Agora verifico a montagem do motor antes de cada sessão de voo.
Gerenciamento de Fios
O roteamento adequado dos fios evita danos e interferências:
- Corte no comprimento apropriado - O excesso de fio adiciona peso e pode ficar preso em obstáculos
- Afaste-se das hélices - Mesmo com protetores de hélice, os fios podem ser cortados
- Prenda à estrutura - Evite vibração e movimento
- Considere a localização do ESC - Fios de motor mais curtos reduzem a resistência e o peso

Direção do Motor e Orientação da Hélice
Os quadricópteros FPV normalmente usam uma configuração "hélices para dentro" ou "hélices para fora":
- Props-in: As hélices giram para dentro na frente do quad
- Melhor manuseio em voo para frente
- Mais eficiente em voo para frente
- Padrão para corrida
- Props-out: As hélices giram para fora na frente
- Melhor autoridade de guinada
- Efeito de lavagem da hélice reduzido
- Popular para freestyle
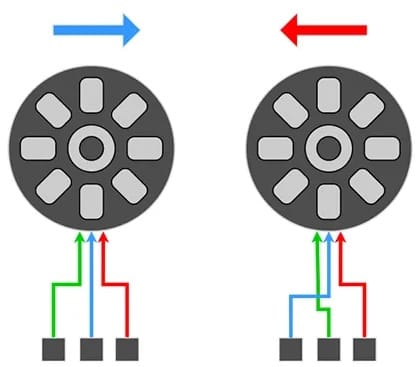
A direção do motor é definida no software do controlador de voo e pela ordem de conexão dos fios ao ESC.
Considerações de Correspondência do ESC
Os motores e ESCs devem ser combinados para um desempenho ideal:
- Classificação de corrente: Os ESCs devem ser classificados para pelo menos a corrente máxima do motor
- Velocidade de resposta: ESCs de alta qualidade fornecem controle de motor mais rápido e preciso
- Suporte a protocolo: ESCs modernos devem suportar DShot600 ou superior para melhor desempenho
- Capacidade de telemetria: ESCs com telemetria fornecem dados valiosos sobre o desempenho do motor
Melhores Práticas de Solda
Uma boa solda é essencial para uma entrega de energia confiável:
- Use calor adequado - 350-380°C para ferros de solda padrão
- Pré-estanhe fios e almofadas - Facilita a conexão final
- Use solda de qualidade - Solda com chumbo 60/40 ou 63/37 funciona melhor para conexões de motor
- Mantenha as juntas limpas - Evite excesso de solda que possa causar curtos-circuitos
- Use o calibre de fio apropriado - 20AWG é padrão para motores quad de 5", 18AWG para construções maiores
Solda ruim é uma das causas mais comuns de problemas de desempenho e falhas que já vi. Uma vez passei horas solucionando um comportamento errático que acabou sendo uma única junta de solda fria em um fio de motor.
Manutenção e Solução de Problemas
A manutenção adequada prolonga a vida útil do motor e evita falhas.
Manutenção de Rolamentos
Os rolamentos geralmente são os primeiros componentes a falhar:
- Limpeza regular - Remova poeira e detritos após voar em condições sujas
- Lubrificação adequada - Uma pequena gota de óleo leve pode prolongar a vida útil do rolamento
- Evite exposição à água - Seque completamente se os motores ficarem molhados
- Ouça as mudanças - O aumento do ruído geralmente indica desgaste do rolamento
Já revivi inúmeros motores "mortos" simplesmente substituindo os rolamentos - uma habilidade que vale a pena aprender se você leva o hobby a sério.
Identificando Motores Danificados
Sinais comuns de danos no motor incluem:
- Danos físicos: Eixos tortos, sinos rachados ou enrolamentos danificados
- Problemas elétricos: Curtos entre fases ou para o terra
- Problemas de desempenho: Potência reduzida, calor excessivo ou vibração
- Sons incomuns: Rangido, cliques ou ruído inconsistente
Pontos de Falha Comuns
Entender os modos de falha típicos ajuda na prevenção:
- Rolamentos - Geralmente o primeiro componente a falhar
- Enrolamentos - Podem ser danificados por superaquecimento ou impacto físico
- Ímãs - Podem rachar, deslocar ou desmagnetizar com impactos ou calor excessivo
- Eixo - Pode entortar com batidas ou pousos bruscos
- Sino - Pode rachar ou ficar desequilibrado com impactos
Remoção de Detritos e Limpeza
A manutenção regular evita problemas:
- Remova detritos visíveis - Verifique se há cabelo, fio ou material vegetal enrolado no sino
- Limpeza com ar comprimido - Sopre poeira e pequenas partículas
- Verifique a contaminação - Procure óleo ou sujeira nos enrolamentos
- Inspecione quanto à corrosão - Principalmente após voar perto de água salgada
Técnicas de Endireitamento do Eixo
Eixos ligeiramente tortos às vezes podem ser recuperados:
- Identifique a dobra - Role o motor em uma superfície plana para encontrar o ponto alto
- Pressão suave - Use uma ferramenta de motor ou alicate com proteção para aplicar pressão suave
- Teste frequentemente - Verifique o progresso com frequência para evitar correção excessiva
- Saiba quando substituir - Algumas dobras são muito severas para serem corrigidas de forma confiável
Já endireitei com sucesso muitos eixos de motor, mas é um processo delicado - muita força vai piorar o problema.
Quando Reparar vs. Substituir
Diretrizes para tomada de decisão:
- Substitua se:
- Os enrolamentos estiverem danificados
- Vários ímãs estiverem soltos ou danificados
- O eixo estiver muito torto
- O sino estiver rachado ou significativamente danificado
- Considere reparar se:
- Apenas os rolamentos estiverem gastos
- O eixo estiver ligeiramente torto
- Um único ímã estiver solto, mas não danificado
- Os problemas de desempenho forem menores
Dicas de Profissionais e Insights de Especialistas
Depois de anos construindo, correndo e reparando drones, reuni alguns insights que vão além das especificações.
Ajuste Fino do Desempenho do Motor
- Balance suas hélices - Mesmo as hélices de fábrica se beneficiam do balanceamento
- Verifique e elimine vibrações - Elas reduzem o desempenho e causam desgaste prematuro
- Considere o timing do motor - Ajustar o timing do ESC pode afinar a resposta do motor
- Combine os motores com cuidado - Use motores do mesmo lote para obter melhores resultados
- Período de amaciamento - Alguns motores têm melhor desempenho após alguns voos para assentar os rolamentos
Modificações Personalizadas
Para quem está disposto a experimentar:
- Atualizações de rolamentos - Substituindo rolamentos de série por opções premium
- Modificações personalizadas do sino - Alguns pilotos perfuram furos de resfriamento estratégicos
- Atualizações do eixo - Eixos de substituição de titânio para durabilidade
- Balanceamento personalizado - Além do equilíbrio de fábrica para o máximo desempenho
- Modificações de enrolamento - Usuários avançados podem rebobinar motores para características específicas
Segredos de Corrida
Corredores competitivos geralmente:
- Inclinam os motores para baixo - Inclinar ligeiramente os motores para trás melhora a eficiência do voo para frente
- Usam sinos mais leves - Sacrificando alguma durabilidade pela capacidade de resposta
- Rodam os motores no limite - Aceitando vida útil mais curta para o máximo desempenho
- Combinam motores com pistas - Motores diferentes para pistas técnicas vs. de alta velocidade
- Ajuste de dessincronização - Ajustando cuidadosamente os parâmetros do ESC para evitar problemas de dessincronização
Otimização da Longevidade
Para a máxima vida útil do motor:
- Fique abaixo de 80% do acelerador para a maioria dos voos
- Permita tempo de resfriamento entre voos agressivos
- Verifique as temperaturas regularmente
- Inspecione e limpe após colisões
- Armazene com cuidado - Evite umidade e temperaturas extremas
Tendências Futuras da Tecnologia de Motores
Olhando para o futuro, podemos esperar:
- Maior integração - Sistemas combinados de motor/ESC/hélice
- Motores inteligentes com sensores integrados e telemetria
- Novos materiais para menor peso e melhor dissipação de calor
- Aumento da eficiência através de melhorias no design e nos materiais
- Designs especializados para categorias emergentes de drones
Perguntas Frequentes: Dúvidas Comuns Sobre Motores de Drones
Como sei que tamanho de motores usar para o meu drone?
Comece com o tamanho do frame e o uso pretendido. Para um quad freestyle padrão de 5", motores 2207 ou 2306 são excelentes para todos os tipos de uso. Para corrida, considere motores um pouco menores, como 2205 ou 2206. Para builds micro abaixo de 3", olhe para motores de tamanho 1303-1404. Combine o motor com o tamanho do frame e seu estilo de voo—corrida precisa de KV mais alto, freestyle se beneficia de KV médio e builds de longa distância/cinematográficos funcionam melhor com motores de KV mais baixo.
O que o KV do motor realmente significa?
KV (Kilo-Velocity) representa o RPM teórico (rotações por minuto) que um motor girará por volt aplicado sem carga. Um motor 2400KV alimentado por uma bateria 4S a 16,8V (totalmente carregada) teoricamente giraria a 40.320 RPM sem uma hélice. Na prática, o RPM real será menor devido à carga da hélice e outras ineficiências. KV mais alto significa rotação mais rápida, mas menos torque, enquanto KV mais baixo fornece mais torque, mas rotação máxima mais lenta.
Quão importantes são os rolamentos do motor?
Extremamente importantes—os rolamentos geralmente são os primeiros componentes a falhar em um motor. Rolamentos de qualidade proporcionam operação mais suave, melhor eficiência e vida útil muito mais longa. Se seus motores desenvolverem um som de trituração ou parecerem ásperos quando você gira o sino com a mão, os rolamentos provavelmente estão se desgastando. Para pilotos sérios, a atualização para rolamentos japoneses ou europeus pode melhorar significativamente a longevidade do motor.
Posso misturar diferentes motores no mesmo drone?
Embora seja tecnicamente possível, não é recomendado. Motores diferentes, mesmo do mesmo tamanho e KV, podem ter características de desempenho ligeiramente diferentes. Isso pode criar desequilíbrios de manuseio e dificultar a afinação. Se você precisar substituir um único motor danificado, tente obter exatamente o mesmo modelo do mesmo lote de produção, se possível.
Como sei se meus motores são do tamanho certo para minha build?
Após um voo, verifique a temperatura do motor. Eles devem estar mornos, mas não muito quentes ao toque (idealmente abaixo de 60°C). Se estiverem extremamente quentes, seus motores podem ser muito pequenos para sua build ou você está usando hélices muito agressivas. Além disso, observe a posição do acelerador em hover—idealmente, seu drone deve pairar em torno de 30-40% do acelerador. Se você precisar de muito mais acelerador para pairar, seus motores podem ser muito pequenos ou estar com desempenho abaixo do esperado.
O que é mais importante, o tamanho do motor ou a classificação KV?
Ambos são importantes, mas servem a propósitos diferentes. O tamanho do motor (dimensões do estator) determina o potencial de potência e torque, enquanto o KV determina como essa potência é entregue em termos de RPM vs. torque. Para uma determinada tensão de bateria, um KV mais alto significa mais RPM, mas menos torque, enquanto um tamanho de estator maior significa mais capacidade de potência geral. Combine ambos com seus requisitos específicos—um quad freestyle pode usar motores 2207 2300KV, enquanto uma build de longo alcance pode preferir motores 2507 1700KV.
Com que frequência os motores devem ser substituídos?
Com os cuidados adequados, motores de qualidade podem durar centenas de voos. Substitua os motores quando:
- Os rolamentos se tornarem barulhentos ou ásperos, mesmo após a manutenção
- O desempenho diminuir visivelmente
- Os enrolamentos estiverem danificados
- O eixo ficar torto além do reparo
- O sino estiver rachado ou danificado
- Os ímãs ficarem soltos ou danificados
Muitos problemas podem ser resolvidos com a substituição dos rolamentos, o que é muito mais econômico do que substituir o motor inteiro.
Os motores caros realmente têm desempenho melhor do que as opções mais baratas?
Em muitos casos, sim, mas com retornos decrescentes. O salto de motores de baixo custo (US$ 10) para motores de médio porte (US$ 20) geralmente traz melhorias significativas no desempenho, consistência e confiabilidade. No entanto, a diferença entre os motores de médio porte e os premium (US$ 30+) costuma ser mais sutil e pode ser perceptível apenas para pilotos experientes ou em cenários competitivos. Para a maioria dos hobistas, motores de médio porte de fabricantes renomados oferecem a melhor proposta de valor. Descobri que o ponto ideal geralmente está na faixa de US$ 18 a 25, onde você obtém a maioria dos benefícios de desempenho sem o preço premium.
Como posso saber se um motor está danificado após uma queda?
Após uma queda, execute estas verificações:
- Gire o sino com a mão - ele deve girar suavemente sem ranger ou travar
- Verifique se há danos físicos no sino, eixo ou base
- Procure enrolamentos expostos ou sinais de danos nos fios
- Certifique-se de que o eixo esteja reto, rolando-o em uma superfície plana
- Verifique se todos os ímãs estão seguros e no lugar
- Teste o motor com entradas de aceleração muito baixas antes de voar
Mesmo que um motor passe por essas verificações, monitore-o de perto durante seu próximo voo. Vibrações incomuns, calor ou ruído podem indicar danos ocultos.
Qual é a diferença entre as versões "N" e "P" dos motores?
Alguns fabricantes oferecem versões normais ("N") e de potência ("P") do mesmo motor. As versões "P" normalmente têm configurações de enrolamento mais agressivas projetadas para máxima potência de saída, muitas vezes à custa da eficiência. Eles são destinados a corridas e freestyle extremo, onde o empuxo máximo é priorizado em relação ao tempo de voo. Para a maioria dos pilotos, as versões padrão "N" proporcionam um melhor equilíbrio entre desempenho e eficiência.
Conclusão
Selecionar os motores certos para seu drone FPV é uma das decisões mais importantes no processo de construção. O motor perfeito não é necessariamente o mais potente ou o mais caro—é aquele que melhor corresponde aos seus requisitos específicos, estilo de voo e o restante de seus componentes.
Para iniciantes, recomendo começar com motores de médio porte em tamanhos padrão (2306 ou 2207 com 1800-2300KV para quads freestyle de 5") de fabricantes renomados. À medida que você desenvolve suas habilidades e preferências, pode experimentar opções mais especializadas, adaptadas ao seu estilo de voo em evolução.
Lembre-se de que o desempenho do motor é apenas uma parte de um sistema complexo. Os melhores motores não terão um bom desempenho com hélices incompatíveis, ESCs inadequados ou afinação ruim. Adote uma abordagem holística para sua build, garantindo que todos os componentes funcionem harmoniosamente juntos.
O cenário dos motores FPV continua evoluindo rapidamente, com os fabricantes constantemente expandindo os limites do que é possível em termos de potência, eficiência e confiabilidade. Ao entender os princípios e especificações fundamentais abordados neste guia, você estará bem equipado para navegar por essas mudanças e tomar decisões informadas para suas builds.
Seja você estiver construindo seu primeiro drone ou o quinquagésimo, espero que este guia o ajude a encontrar os motores perfeitos para corresponder aos seus sonhos de voo. Feliz voo!
Referências e Leitura Adicional
- ESCs de Drone: Princípios e Operação
- Controladores de Voo de Drone: Princípios e Operação
- Visão Geral dos Tipos e Química de Baterias de Drone
- Amortecimento de Vibração de Drone
Recursos Externos
- Miniquad Test Bench - Dados abrangentes de testes de motores
- Canal do YouTube de Joshua Bardwell - Explicações detalhadas sobre motores e tutoriais
- Calculadora de Motores eCalc - Ferramenta para estimar o desempenho do motor com diferentes hélices e baterias


