ドローンモーター:選択、性能、最適化
FPVドローンのモーターは、飛行時間と俊敏性から最高速度とハンドリング特性に至るまで、すべてに直接影響を与える、ドローンの鼓動するハートです。何百ものドローンを製作し、長年にわたって数え切れないほどのモーターの組み合わせをテストした結果、モーターの選択は芸術であると同時に科学であることを学びました。それは、あなたの飛行体験を作ることも壊すこともできるものです。この包括的なガイドでは、FPVドローンのモーターについて知っておくべきすべてのことを、基本原理から高度な最適化テクニックまで説明します。
FPVドローンモーターの紹介
FPV(ファーストパーソンビュー)ドローンは、飛行に必要な推力を生み出すために、電動ブラシレスモーターに依存しています。これらのモーターは、バッテリーからの電気エネルギーを機械的回転に変換し、プロペラを駆動して揚力と機動性を生み出します。
選択するモーターは、根本的にドローンの特性を定義します:
- 出力と推力は、加速と最高速度を決定します
- 重量は、俊敏性と飛行時間に影響します
- 応答速度は、ハンドリングの精度と制御に影響します
- 効率は、バッテリー寿命と飛行時間に影響します
- 耐久性は、クラッシュやハードランディングにどれだけ耐えられるかを決定します
最初のドローンを製作する場合でも、10台目のレーシングリグを最適化する場合でも、モーター技術を理解することは、飛行目標に合った設定を作るために不可欠です。
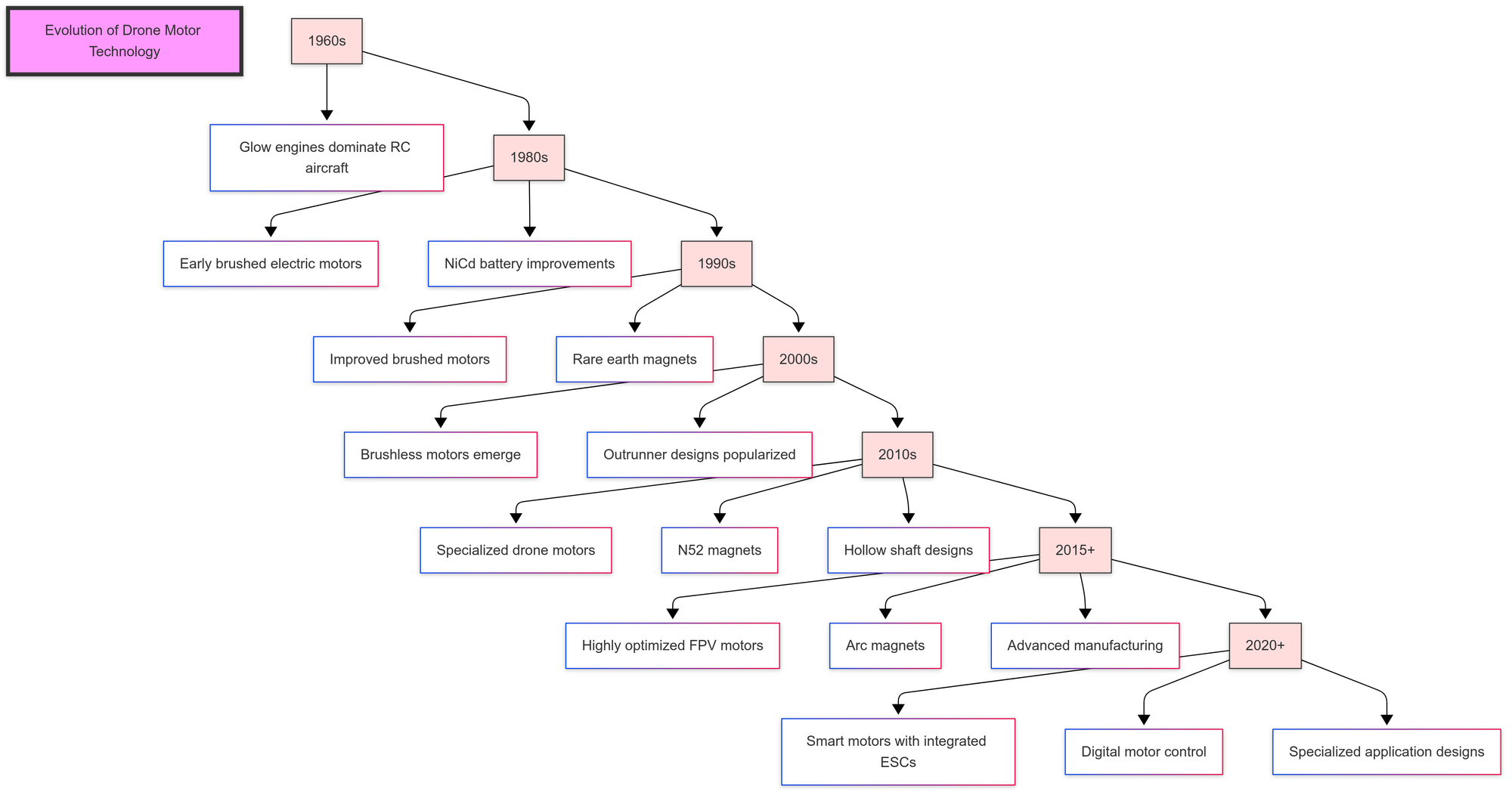
ドローンモーターの歴史と進化
ドローン用モーターの開発は、現在私たちが知っている近代的なFPVホビーを可能にした技術革新の魅力的な旅を表しています。
初期のRCモーター(1960年代〜1990年代)
最初のラジオコントロール航空機は、グロープラグエンジン(小型内燃機関)またはブラシ付き電動モーターを使用していました:
- 1960年代〜1970年代: グロープラグエンジンがRC航空機を支配し、電動オプションは限られていました
- 1980年代: NiCdバッテリーの改良により、初期のブラシ付きモーターがより実用的になりました
- 1990年代: 希土類磁石を使用した高品質のブラシ付きモーターにより、性能が向上しました
これらの初期の電動システムは重く、効率が悪く、出力が制限されていたため、本格的なアクロバット飛行は困難でした。
ブラシレス革命(2000年代)
2000年代初頭には、RCアプリケーション用のブラシレスモーターが登場しました:
- 2000年〜2005年: 最初の商業的に実用的なブラシレスモーターとESC
- 2005年〜2010年: アウトランナー設計(ベルがステーターの周りを回転する)が高トルクのために人気になりました
- 2007年〜2010年: RCヘリコプターがモーター設計と制御の革新を促進しました
これらの初期のブラシレスモーターは、主に固定翼機とヘリコプター用に設計されており、今日私たちが知っているようなマルチローターのドローンではありませんでした。
マルチローター時代(2010年〜2015年)
マルチローターのドローンの爆発的な普及により、専用モーターの需要が生まれました:
- 2010年〜2012年: 第1世代の専用マルチローターモーター(大型で重い設計)
- 2012年〜2013年: 一般的な「22XX」サイズフォーマットの導入
- 2013年〜2014年: 製造技術の向上により重量が軽減されました
- 2014年〜2015年: N52磁石が標準となり、出力密度が大幅に向上しました
この時代の「高性能」モーターを見たことがありますが、当時は強力だと考えられていましたが、今日の基準では笑えるほど重くて出力不足でした。
現代のFPVモーター開発(2015年〜現在)
ここ数年、FPVアプリケーション専用のモーター技術が急速に進歩しています:
- 2015年〜2017年: 軽量設計の専用レーシングモーター
- 2017年〜2018年: チタンシャフトと先進的なベル設計の導入
- 2018年〜2019年: 効率化のためのアーク磁石と最適化されたエアギャップ
- 2019年〜2020年: 耐久性が向上した超軽量設計
- 2020年〜現在: 統合ESCとデジタル制御システムを備えたスマートモーター
革新のスピードは目覚ましく、比較的短期間でモーターは同時に軽量化、高出力化、高効率化、高耐久化を実現しています。
ブラシレスモーターの基礎
ブラシレスモーターとブラシ付きモーターの比較
初期のRC航空機はブラシ付きモーターを使用していました。これは、コミュテーターと接触して回転を生み出す物理的なブラシを持っています。シンプルで安価ですが、これらのモーターには以下のような欠点があります:
- 効率が低い
- ブラシの摩耗による寿命の短さ
- 出力密度の制限
- 高いメンテナンス要件
現代のFPVドローンは、物理的なブラシを電子的な整流に置き換えたブラシレスDC(BLDC)モーターを使用しています。この進歩により、以下のような利点があります:
- 高効率(ブラシ付きの50〜60%に対して80〜90%)
- 長寿命(摩耗するブラシがない)
- 優れた出力重量比
- 放熱性の向上
- 低いメンテナンス要件
ブラシレスモーターの構成部品
ブラシレスモーターの物理的な構成部品を理解することは、品質と用途への適合性を評価するのに役立ちます:
- ベル(ローター):マグネットを保持し、プロペラを取り付ける外側の回転部分。
- ステーター:銅線が巻かれた固定された内側のコア。ステーターのサイズは重要な仕様です(詳細は後述)。
- マグネット:通常、ネオジム合金(N52、N54など)製で、ステーター巻線と相互作用する磁場を生成します。
- 巻線:特定のパターン(デルタ結線またはワイ結線)でステーターのポールに巻かれた銅線。
- ベアリング:回転するベルを支え、摩擦を低減します。長寿命と高性能のために、高品質のベアリングが不可欠です。
- モーターシャフト:ベルをベアリングに接続し、プロペラを取り付けるために延長されています。
- ベース/マウント:モーターをドローンフレームに取り付けるための取り付け穴を備えた底部。
ブラシレスモーターの動作原理
ブラシレスモーターは電磁気の原理で動作します:
- ESC(電子スピードコントローラー)がモーター巻線に正確なタイミングで電気パルスを送信します
- これらのパルスがステーターに電磁界を生成します
- 電磁界がベル内の永久磁石と相互作用します
- この相互作用により回転力(トルク)が生成されます
- ESCはこれらのパルスのタイミングと強さを継続的に調整して、速度と方向を制御します
この電子整流がブラシレスモーターを非常に効率的で応答性の高いものにしています。私がタイトなテクニカルトラックを突き進むとき、高品質のモーター/ESCの組み合わせからの即時の応答を感じることができます。スティック入力からモーターの反応までの遅延はほとんどありません。
モーターの仕様を理解する
モーターの仕様を解読することは、情報に基づいた選択をするために不可欠です。主要なパラメーターを分解してみましょう:
モーターサイズの表記
FPVモーターには通常、2207や2306のような4桁の数字が表示されています。この表記はステーターの物理的寸法を示しています:
- 最初の2桁:ステーター幅(直径)(mm)
- 最後の2桁:ステーター高さ(mm)
たとえば、2207モーターのステーターは幅22mm、高さ7mmです。
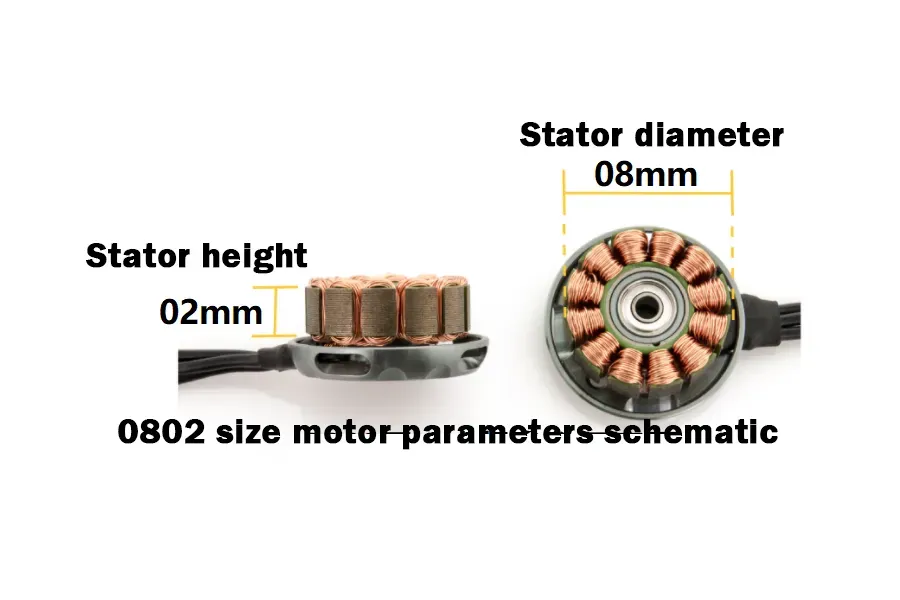

一般的に:
- ステーター幅が大きい = トルクが大きい
- ステーター高さが高い = パワーとトップエンドのパフォーマンスが向上
私の経験では、22mmと23mmのステーター幅の違いは紙の上では小さく見えるかもしれませんが、飛行中のドローンの感覚を完全に変えることができます。私の2207フリースタイルビルドは、2306セットアップよりも明らかにスナップの効いた応答性を持っています。2306は、よりスムーズでリニアなパワー伝達を感じます。
KV値
KV(キロベロシティ)は、無負荷時に1ボルトあたりのモーターの理論的なRPM(毎分回転数)を表します:
- 4Sバッテリー(フル充電時16.8V)の2400KVモーターは、プロペラなしで理論的に40,320RPM(2400×16.8)で回転します
実際には、負荷と非効率性により、実際のRPMは低くなります。KV値は重要な意味を持ちます:
- 高KV(2400KV以上):最高速度が速く、応答性が高く、レーシングや小型プロペラに適しています
- 中KV(1700〜2300KV):バランスの取れたパフォーマンス、フリースタイルやオールラウンドな飛行に適しています
- 低KV(1300〜1600KV):トルクが大きく、効率が良く、大型プロペラやロングレンジ飛行に適しています
私がFPVの旅を始めた頃に犯した間違いの1つは、「速いほど良い」と考えて、常に利用可能な最高のKVモーターを選んでいたことです。私はすぐに、フリースタイルクアッドで超高KVモーターを使用すると、ピリピリして滑らかに飛行するのが難しくなり、飛行時間が大幅に短縮されることを学びました。
ステーターサイズの影響
ステーターサイズはモーターの性能に直接影響します:
| ステーターサイズ | 一般的な使用例 | 特性 |
|---|---|---|
| 1105-1306 | マイクロクアッド(2-3インチ) | 軽量、低出力、効率的 |
| 1407-1506 | ミニクアッド(3-4インチ) | 重量とパワーのバランスが良い |
| 2004-2206 | 中型クアッド(4-5インチ) | 応答性が高く、テクニカルな飛行に適している |
| 2207-2306 | 標準的な5インチクアッド | パワフルなオールラウンダー |
| 2407-2507 | ヘビーフリースタイル/シネマティック | 最大出力、重いペイロードに対応 |
| 2807-2912 | 7インチ以上のロングレンジ | 大型プロペラ用の高トルク |
ステーターが大きいほど、より多くの出力を生み出すことができますが、重量が増加します。最適な点は、フレームサイズ、バッテリー、飛行スタイルによって異なります。
マグネットの強度とタイプ
マグネットは強度で等級付けされ、数値が大きいほど磁力が強いことを示します:
- N48: 標準的な強度
- N52: 強力で、中級モーターによく使用される
- N54/N55: 非常に強力で、プレミアムモーターに使用される
より強力なマグネットはトルクと応答性を高めますが、効率を下げモーター温度を上げる可能性があります。一部のメーカーは、従来の直線型マグネットではなく、ベルの円周に合わせて湾曲したアークマグネットを使用し、効率の向上を主張しています。
弱いマグネットを使用したモーターが激しいクラッシュで減磁してしまった経験から、特にフリースタイルフライトのように衝撃が避けられない場合、N52以上のマグネットを使用したモーターへの投資は耐久性の面で価値があると感じています。
巻線構成
モーターの巻線はさまざまなパターンで配置できます:
- デルタ: 3つの接続で、一般的に高回転数でより強力
- ワイ (スター): 中心タップを持つ3つの接続で、通常低回転数でより効率的
ほとんどのFPVモーターは、そのパフォーマンス特性からデルタ巻線を使用していますが、一部のメーカーは特定のパフォーマンス目標のために、ハイブリッドや変形巻線パターンを試しています。
重量に関する考慮事項
モーターの重量は以下に影響する重要な要素です:
- 飛行特性: より軽量なモーターはより機敏な操縦性を意味する
- 総重量: 飛行時間とパフォーマンスに影響する
- 回転質量: スロットル変化に対する応答性に影響する
最新のモーターは、強度を犠牲にすることなく軽量化が進んでおり、プレミアムオプションではチタンシャフトやアルミニウム/マグネシウム合金ベルを使用して重量を削減しています。
出力処理能力
モーターの出力処理能力は通常ワット単位で測定され、以下によって決定されます:
- 巻線の銅質量
- 放熱能力
- 構造品質
メーカーは「最大連続出力」や「バースト出力」などの仕様を提供することがありますが、これらは絶対的な限界値というよりはガイドラインとして考えるべきです。
ベンチテストで約800Wの出力で30秒後に「1200W対応」のモーターが溶けてしまうのを見て以来、出力の主張には懐疑的になりました。評判の良いメーカーの高品質モーターは、定格をより控えめに設定する傾向があります。
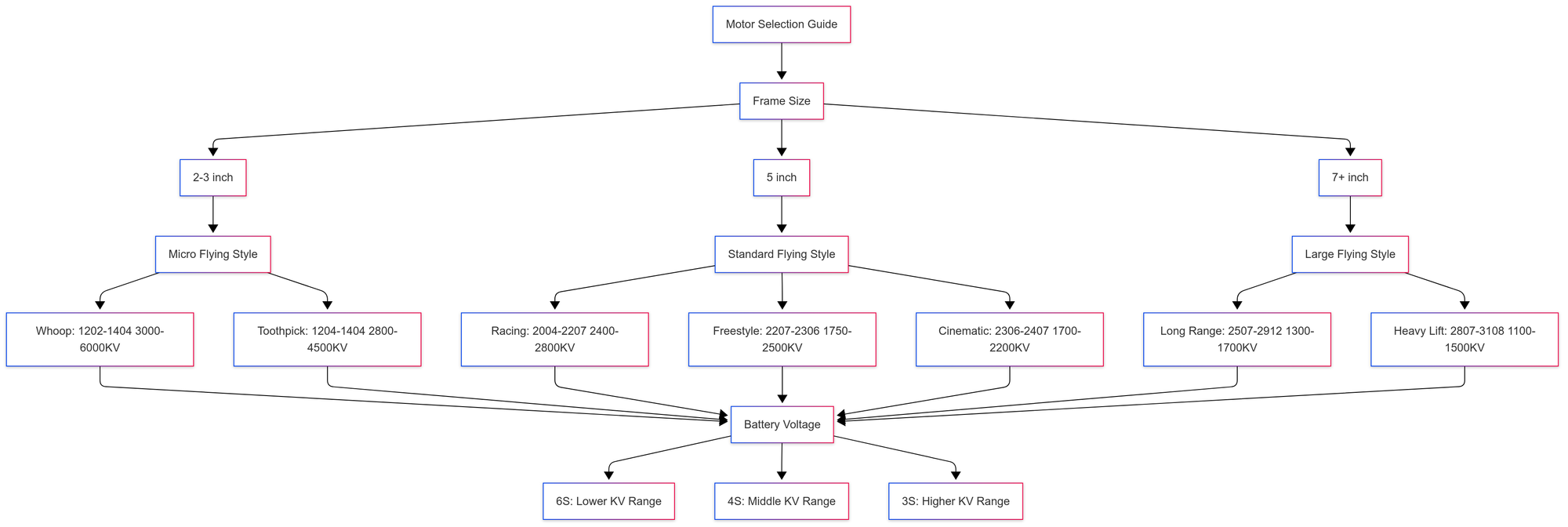
モーター選択ガイド
適切なモーターを選ぶには、モーターの特性を特定のビルドと飛行目標に合わせる必要があります。
モーターとフレームサイズのマッチング
フレームサイズは適切なモーター選択を大きく左右します:
| フレームサイズ | 推奨モーターサイズ | 一般的なKVレンジ |
|---|---|---|
| 2-3" マイクロ | 1105-1306 | 3000-6000KV |
| 3" トゥースピック | 1204-1404 | 2800-4500KV |
| 3.5" シネフープ | 1404-1506 | 2600-3600KV |
| 4" 軽量 | 1606-2004 | 2400-3200KV |
| 5" フリースタイル | 2205-2306 | 1750-2500KV |
| 5" レーシング | 2004-2207 | 2400-2800KV |
| 6" フリースタイル | 2306-2407 | 1600-2000KV |
| 7"+ ロングレンジ | 2507-2912 | 1300-1700KV |
これらは出発点であり、特定の要件によってはこれらの推奨から変更が必要になる場合があります。
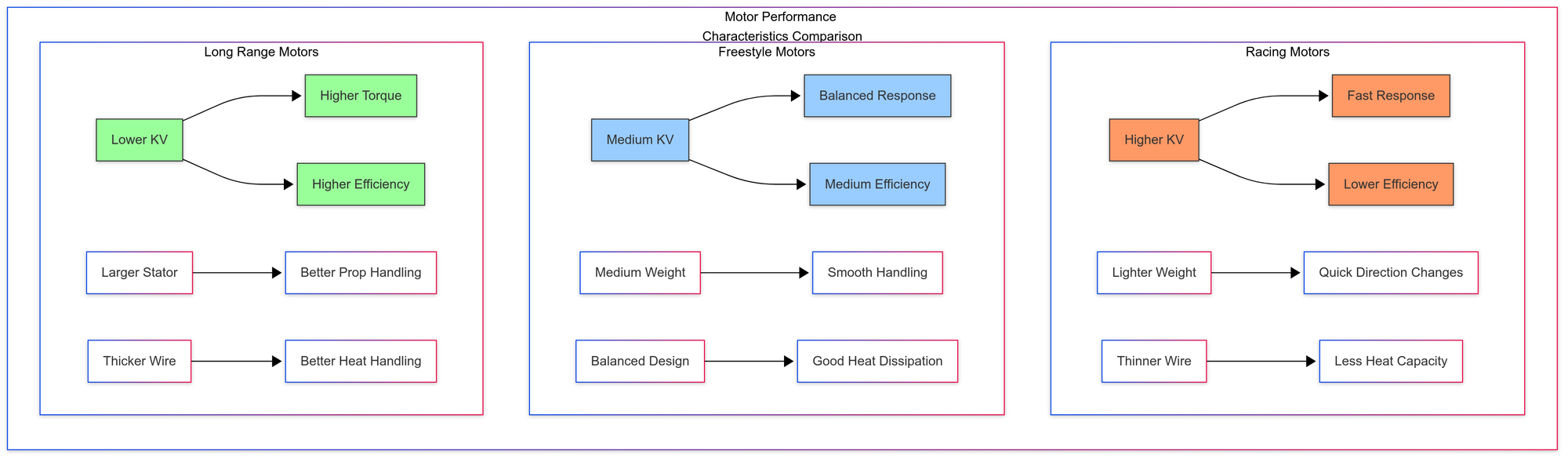
異なる飛行スタイルに対する考慮事項
飛行スタイルによって求められるモーター特性は異なります:
レーシング
- 優先事項: スピード、加速、応答性
- 推奨: 軽量、高KV (5"の場合2400-2800KV)
- ステーターサイズ: 直径がやや小さく高さが高いことが多い (例: 2207)
- 注意点: レーシング用モーターは耐久性や効率よりもバースト性能を優先
専用のレーシングビルドでは、パワーを多少犠牲にしても、重量と慣性の低いモーターが有利だと感じています。テクニカルなトラックでは、絶対的な推力よりも素早く方向転換できる能力の方が重要なことが多いです。
フリースタイル
- 優先事項: スムーズな出力特性、耐久性、良好なスロットル分解能
- 推奨: 中程度のKV (5"の場合1800-2300KV)
- ステーターサイズ: バランス重視 (例: 2306, 2207)
- 注意点: スムーズな巡航から激しい機動まで、多様な飛行に対応する必要がある
フリースタイルでは、ステーター質量が少し大きめで、低速の精密な動きから高出力のトリックまで、よりスムーズなスロットル応答と良好な操縦性を提供するモーターを好みます。
シネマティック/ロングレンジ
- 優先事項: 効率、スムーズな動作、信頼性
- 推奨: 低KV (5-7"の場合1300-1800KV)
- ステーターサイズ: 大型プロペラ用のトルクのために大きめが多い (例: 2407, 2507)
- 注意点: 長時間飛行のために出力要求と効率のバランスが必要
ロングレンジビルドでは、低いスロットルパーセンテージで動作する少し大きめのモーターの方が、高いスロットルで動作する小さいモーターよりも効率が良いことがわかりました。この直感に反するアプローチで、飛行時間を数分延ばすことができました。
マイクロビルド
- 優先事項: 軽量化、十分な出力
- 推奨: 高KV (サイズに応じて3000-6000KV)
- ステーターサイズ: 出力要求を満たす範囲で可能な限り小さく
- 注意点: 1gでも重要、わずかな重量差が顕著に現れる
パワー重量比
モーターの適合性を評価する有用な指標は、完成機の推力重量比です:
- レーシング: 12:1~15:1 (極めて高い応答性、短い飛行時間)
- フリースタイル: 8:1~12:1 (応答性と飛行時間のバランスが良い)
- シネマティック: 5:1~8:1 (よりスムーズな飛行、長い飛行時間)
- ロングレンジ: 3:1~5:1 (最大効率、安定した飛行)
これらの比率は、利用可能な総推力をドローンの総重量で割ったものを表しています。
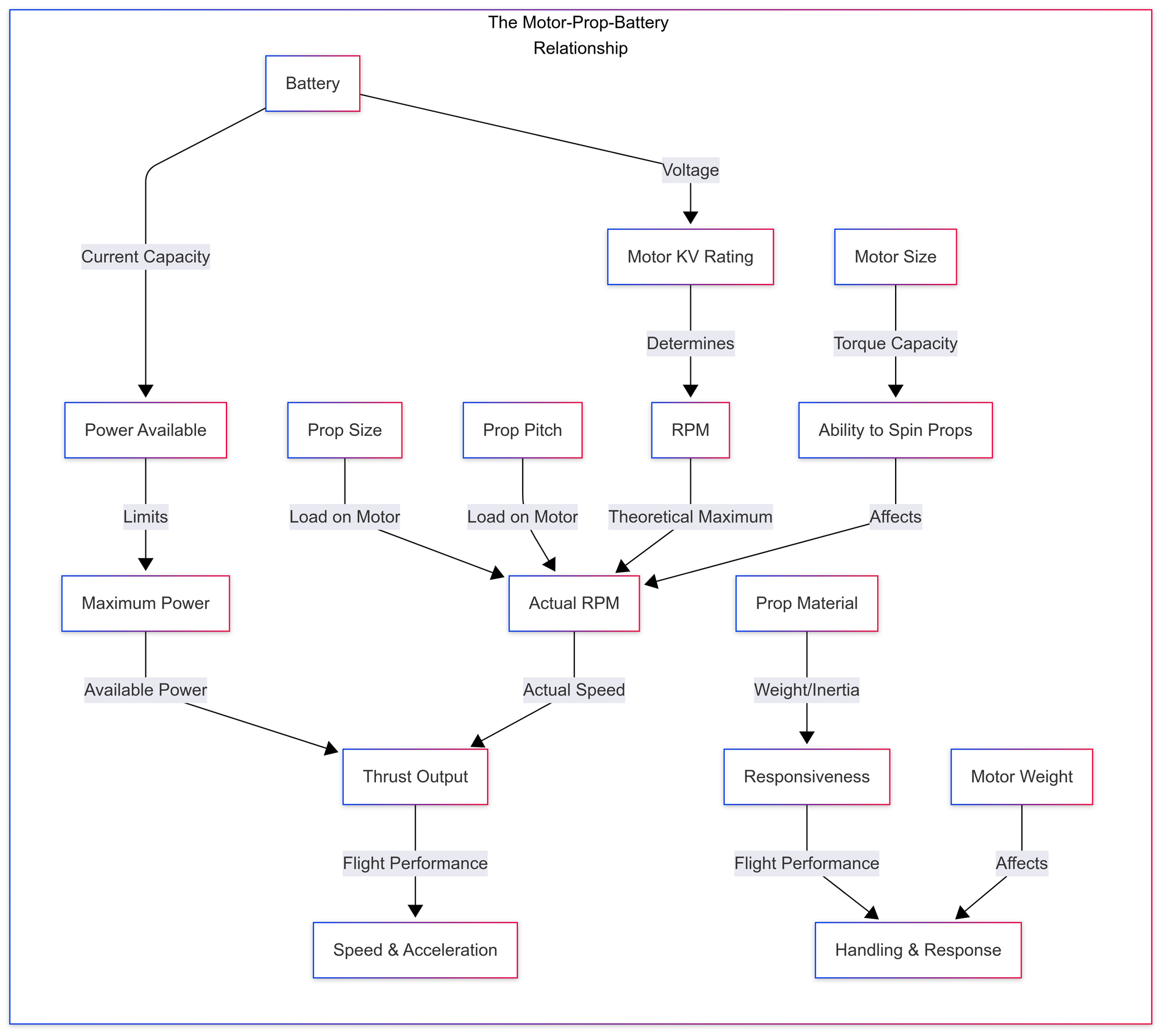
モーターとプロペラのマッチングの原則
モーターとプロペラは慎重にマッチングする必要があります:
- プロペラが大きいほど、トルクの大きいモーター(ステーター直径が大きい)が必要
- ピッチの高いプロペラは、モーターに負荷がかかり、KVを下げる必要がある場合がある
- 重いプロペラは、モーターの温度を上昇させ、反応性を低下させる
5インチクアッドの一般的なガイドライン:
- 5x4x3プロペラ(5インチ、4インチピッチ、3枚):2300-2600KVモーターに適している
- 5x5x3プロペラ:1900-2300KVモーターとのマッチングが良い
- 5x4.5x2プロペラ:レーシング用に高KV(2400-2800KV)を使用可能
かつて、6Sで高KV(2750KV)モーターにアグレッシブな5x4.3x3プロペラを使用したことがあるが、スラストは信じられないほど高かったものの、2分間のフライト後にモーターが非常に熱くなり、においがした。適切なマッチングは長寿命のために不可欠である。
バッテリー電圧に関する考慮事項
モーターのKVは、バッテリー電圧に合わせる必要がある:
| バッテリー | 5インチ用KVレンジ | 備考 |
|---|---|---|
| 3S (12.6V) | 2600-3000KV | 現在は一般的ではないが、一部のレーシングビルドで使用されている |
| 4S (16.8V) | 2300-2600KV | バランスが良く、フリースタイルで人気 |
| 5S (21.0V) | 1900-2300KV | 人気が高まっており、パワーと効率のバランスが良い |
| 6S (25.2V) | 1700-2000KV | 最大出力で、フリースタイルとシネマティックで人気 |
適切な低KVモーターを使用した高電圧システム(6S)は、一般的に以下のような特徴がある:
- 効率が良い
- バッテリー放電中のパワーがより一定している
- 同じ出力に対して電流引き込みが少ない
- 負荷時の電圧サグが少ない
モーターの性能指標
モーターの性能を理解するには、仕様を超えて実際の性能データを見る必要がある。
スラストテストの説明
スラストテストでは、様々なスロットルレベルでのモーター/プロペラの組み合わせによって生成される実際の力を測定する:
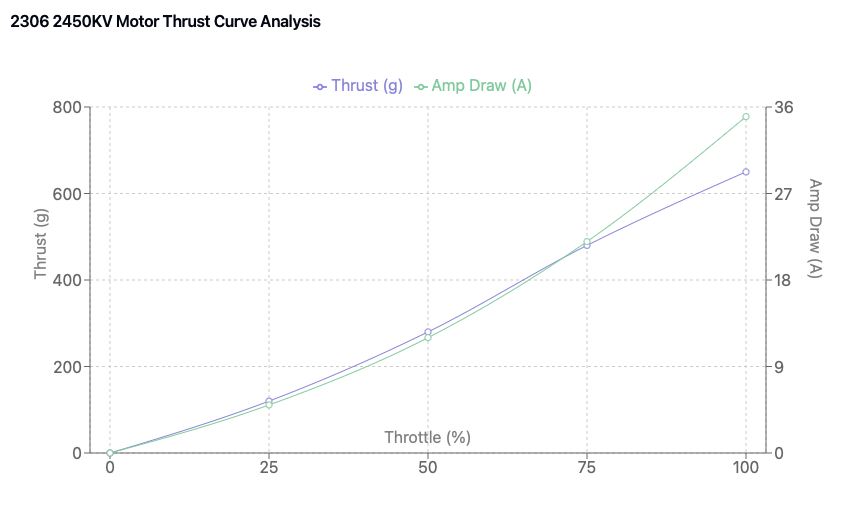
スラストテストの主要な指標には以下が含まれる:
- 最大スラスト: 100%スロットルで生成されるピーク推力
- スラスト曲線: スロットル入力に対してスラストがどのように直線的に増加するか
- 効率: 消費電力1ワットあたりのスラスト
- 電流引き込み: 異なるスロットルレベルでの電流消費量
私は独自のスラストテスト装置を製作したが、その結果は製造元の主張と矛盾することがよくある。「高スラスト」と宣伝されているモーターの中には、実際にはより控えめなオプションよりもスラストが低く、かなり高温で動作するものもある。
スラストデータチャートの解釈
スラストテストデータを調べる際は:
- 最大スラストだけでなく - 最大スラストはわずかに低いが、より直線的なスラスト曲線を持つモーターは、多くの場合、より良いハンドリングを提供する。
- 一般的なスロットル位置でのスラストを考慮する - ほとんどの飛行は20-60%のスロットルで行われるため、この範囲での性能は最大スラストよりも重要である。
- 効率を比較する - 2つのモーターが同様のスラストを生成する場合でも、一方が大幅に電流引き込みが少ない場合、より長いフライト時間を提供する。
- 温度上昇をチェックする - 過度の熱は非効率と潜在的な寿命の問題を示している。
効率に関する考慮事項
モーターの効率(ワット当たりのスラスト)は、スロットル範囲全体で異なる:
- ほとんどのモーターは、30-60%のスロットルで最も効率が良い
- 非常に低いスロットルと非常に高いスロットルでは、効率が大幅に低下する
- ステーターが大きいほど、大きなプロペラでの効率が良くなる傾向がある
- 高KVモーターは、通常、効率を犠牲にして反応性を高める
ロングレンジビルドでは、30-50%のスロットル範囲で良好な効率を維持するモーターを優先する。これは、ドローンが飛行時間の大部分を過ごす場所だからである。
温度管理
モーターの温度は、適切なマッチングとセットアップの重要な指標である:
- 通常の動作温度: 触れると温かいが、持つのに不快ではない(40-60°C)
- 注意範囲: 快適に触れるには熱すぎる(60-80°C)
- 危険ゾーン: 触れるには熱すぎる(80°C以上)
モーターの温度に影響を与える要因:
- KV値(KVが高いほど発熱量が多い)
- プロペラのサイズとピッチ(アグレッシブなほど発熱量が多い)
- フライングスタイル(アグレッシブな操作ほど発熱量が多い)
- 周囲温度
- 冷却エアフロー
私は、各フライト後にモーターに触れる習慣を身につけた。これは、故障する前に潜在的な問題を警告し、多くのモーターの損傷を防ぐのに役立つシンプルなチェックである。
ノイズ特性
モーターのノイズは、性能特性を示すことがある:
- 滑らかで低音のサウンド: 一般的に効率的な動作を示します
- 高音の音: 非常に高いRPMを示し、限界に近づいている可能性があります
- グラインドまたは不均一なサウンド: ベアリングの問題またはアンバランスを示す可能性があります
- 特定のスロットル位置での共振: 振動の問題を示す可能性があります
過度のノイズは単に煩わしいだけでなく、非効率性と相関し、潜在的な問題を示すことがあります。
モーターの高度な概念
さらにパフォーマンスを最適化したい人のために、これらの高度な概念はモーターの選択とセットアップを微調整するのに役立ちます。
エアギャップの最適化
エアギャップはステーターとマグネットの間の距離です:
- ギャップが小さい: より強力で応答性が高いが、効率が低くなる可能性がある
- ギャップが大きい: より効率的で冷却性が高いが、パワーは低い
プレミアムモーターは、パフォーマンスと効率のバランスを取る精密に最適化されたエアギャップを備えていることが多いです。
ベアリングの種類と品質
ベアリングはパフォーマンスと寿命に影響を与える重要なコンポーネントです:
- 標準ベアリング: カジュアルな飛行に適しています
- シールドベアリング: ほこりや湿気に対する保護が向上
- セラミックベアリング: 摩擦が減少し、寿命が長くなりますが、コストが高い
- ハイブリッドベアリング: スチールレースにセラミックボール、パフォーマンスとコストのバランスが良い
予算モーターに見られる一般的な中国製ベアリングと比較して、高品質な日本製ベアリング(標準的なスチール製でも)にアップグレードすると、モーターのスムーズさと寿命に顕著な違いが出ることがわかりました。
ベルの設計と材料
ベルの設計は重量、冷却、耐久性に影響します:
- 標準ベル: 通常はアルミニウム製で、重量と強度のバランスが良い
- 軽量ベル: 重量を減らすために材料を薄くしたりカットアウトを入れたりしている
- 冷却設計: 空気の流れを改善するための追加のカットアウトやフィン
- 材料のバリエーション: 一部のプレミアムモーターではチタン、マグネシウム合金、カーボンファイバーのコンポーネントを使用
片側フラックス設計 vs 両側フラックス設計
モーター設計は磁束パターンが異なります:
- 片側フラックス: マグネットはベルの外側のみ、軽量だがパワーは低い
- 両側フラックス: マグネットはベルの上部と側面の両方にあり、パワーは高いが重い
両側フラックス設計は、特に大型サイズでパフォーマンス上の利点があるため、プレミアムモーターでより一般的になっています。
中空シャフト設計 vs ソリッドシャフト設計
モーターシャフトには2つの主な設計があります:
- ソリッドシャフト: 従来の設計、最大限の強度
- 中空シャフト: 軽量、ほとんどのアプリケーションに十分な強度、より良い冷却
レーシングとフリースタイルでは、中空シャフト設計は回転質量が減るため、応答性が顕著に向上することがわかりました。
アークマグネット vs ストレートマグネット
マグネットの形状はパフォーマンス特性に影響します:
- ストレートマグネット: 従来の設計、製造が容易
- アークマグネット: ベルの円周に合わせて湾曲しており、効率が高い可能性がある
一部のメーカーはアークマグネットで5〜10%の効率改善を主張していますが、実際の利点は様々です。
ワイヤーゲージと巻線技術
巻線の仕様はパフォーマンスに影響します:
- ワイヤーゲージ: 太いワイヤー(ゲージ番号が小さい)は電流をより多く流せるが、ステーターに収まるターン数は少ない
- 巻線技術: 手巻きか機械巻きかで一貫性とパフォーマンスに影響
- 占積率: ステーター内のスペースが銅でどれだけ効率的に利用されているか
プレミアムモーターは占積率の高い「高密度巻線」を宣伝していることが多く、その結果、銅の質量が増えてパフォーマンスが向上します。
取り付けとセットアップ
適切な取り付けは、モーターの最適なパフォーマンスと寿命のために非常に重要です。
適切な取り付け方法
モーターを取り付ける際は:
- 適切なネジを使用する - 長すぎるとワイヤーに接触し、短すぎると適切に固定されない
- ネジロック剤を塗布する - 中強度(青)のネジロック剤は振動による緩みを防ぐ
- 拘束がないか確認する - 取り付け後、ベルが自由に回転することを確認
- アライメントを確認する - モーターはアームに対して完全に垂直でなければならない

振動で緩んだネジが原因でモーターを飛行中に失ったことから、適切な取り付けの重要性を痛感しました。今では毎回の飛行前にモーターの取り付けを確認しています。
ワイヤー管理
適切なワイヤー配線は、損傷や干渉を防ぎます:
- 適切な長さにカットする - 余分なワイヤーは重量を増やし、障害物に引っかかる可能性がある
- プロペラから離して配線する - プロペラガードがあっても、ワイヤーが切断される可能性がある
- フレームに固定する - 振動と動きを防ぐ
- ESCの位置を考慮する - モーターワイヤーが短いほど抵抗と重量が減る

モーターの回転方向とプロペラの向き
FPVクワッドは通常、「プロペライン」または「プロペラアウト」の構成を使用します:
- プロップイン: プロペラがクアッドの前方で内側に回転する
- 前進飛行時のハンドリングが向上
- 前進飛行時の効率が向上
- レーシングの標準
- プロップアウト: プロペラが前方で外側に回転する
- ヨー制御が向上
- プロップウォッシュ効果が軽減
- フリースタイルで人気
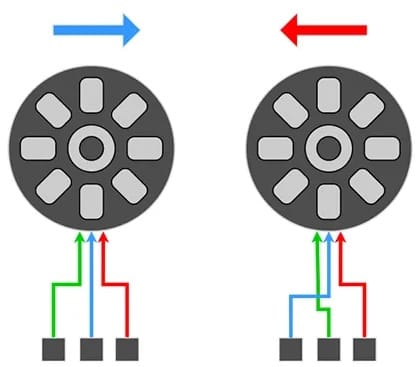
モーターの回転方向は、フライトコントローラーのソフトウェアと、ESCへの配線の順序で設定されます。
ESCのマッチングに関する考慮事項
最適なパフォーマンスを得るには、モーターとESCを適切に組み合わせる必要があります:
- 電流定格: ESCは少なくともモーターの最大電流に対応した定格であるべき
- 応答速度: 高品質のESCはより高速で正確なモーター制御を提供
- プロトコルサポート: 最高のパフォーマンスを得るには、最新のESCがDShot600以上をサポートしている必要あり
- テレメトリー機能: テレメトリー付きのESCはモーターのパフォーマンスに関する貴重なデータを提供
はんだ付けのベストプラクティス
信頼性の高い電力供給には適切なはんだ付けが不可欠:
- 十分な熱を使用 - 標準のはんだごては350〜380°C
- ワイヤーとパッドのプリタイン - 最終的な接続が容易になる
- 高品質のはんだを使用 - モーター接続には60/40または63/37の有鉛はんだが最適
- 接合部を清潔に保つ - ショートの原因となる過剰なはんだは避ける
- 適切なワイヤーゲージを使用 - 5インチクアッドモーターには20AWG、大型機には18AWGが標準
不適切なはんだ付けは、私が見てきたパフォーマンスの問題や故障の最も一般的な原因の1つです。かつて、モーターワイヤーの1つのコールドはんだ接合が原因で、何時間も不安定な動作のトラブルシューティングに費やしたことがあります。
メンテナンスとトラブルシューティング
適切なメンテナンスはモーターの寿命を延ばし、故障を防ぎます。
ベアリングのメンテナンス
ベアリングは通常、最初に故障する部品です:
- 定期的な清掃 - 汚れた環境で飛行した後は、ほこりやゴミを取り除く
- 適切な潤滑 - 少量の軽油を使うことでベアリングの寿命を延ばせる
- 水への曝露を避ける - モーターが濡れた場合は完全に乾燥させる
- 音の変化に注意 - 騒音の増加はベアリングの摩耗の兆候であることが多い
私は単にベアリングを交換するだけで、無数の「死んだ」モーターを蘇らせてきました。このスキルは、このホビーに真剣に取り組むなら身につける価値があります。
損傷したモーターの特定
モーターの損傷の一般的な兆候:
- 物理的損傷: シャフトの曲がり、ベルのひび割れ、巻線の損傷
- 電気的問題: 相間またはグランドへのショート
- パフォーマンスの問題: 出力低下、過熱、振動
- 異音: グラインド音、カチカチ音、不規則なノイズ
一般的な故障箇所
典型的な故障モードを理解することは、予防に役立ちます:
- ベアリング - 通常、最初に故障する部品
- 巻線 - 過熱や物理的衝撃で損傷する可能性あり
- マグネット - 衝撃や過剰な熱でひび割れ、ずれ、減磁する可能性あり
- シャフト - 墜落やハードランディングで曲がる可能性あり
- ベル - 衝撃でひび割れたりバランスが崩れたりする可能性あり
異物の除去と清掃
定期的なメンテナンスで問題を防止:
- 目に見える異物を取り除く - ベルに巻き付いた髪の毛、糸、植物などをチェック
- 圧縮空気による清掃 - ほこりや小さな粒子を吹き飛ばす
- 汚染をチェック - 巻線に油や汚れがないか確認
- 腐食の点検 - 特に海水の近くを飛行した後
シャフトの矯正テクニック
少し曲がったシャフトは、場合によっては修復可能:
- 曲がりを特定 - モーターを平らな面で転がして最高点を見つける
- 優しい圧力 - モーターツールや保護材付きのペンチで優しく圧力をかける
- 頻繁にテスト - 過剰修正を避けるため、進捗状況を頻繁にチェック
- 交換のタイミングを知る - 修正が難しすぎる曲がりもある
私は多くのモーターシャフトを上手く矯正してきましたが、デリケートな作業です。力を入れすぎると問題が悪化します。
修理か交換かの判断
意思決定のガイドライン:
- 交換すべき場合:
- 巻線が損傷している
- 複数のマグネットが緩んでいたり損傷していたりする
- シャフトが大きく曲がっている
- ベルにひびが入っているか大きく損傷している
- 修理を検討する場合:
- ベアリングのみが摩耗している
- シャフトがわずかに曲がっている
- 1つのマグネットが緩んでいるが損傷はない
- パフォーマンスの問題が軽微である
プロのヒントと専門家の見識
ドローンの製作、レース、修理に長年携わってきた中で、仕様書には書かれていない洞察を得てきました。
モーターのパフォーマンスの微調整
- プロペラのバランスを取る - 工場出荷時のプロペラでもバランス調整の恩恵を受けられる
- 振動をチェックし、除去する - 振動はパフォーマンスを低下させ、早期の摩耗を引き起こす
- モータータイミングを考慮する - ESCのタイミングを調整することでモーターの応答性を微調整できる
- モーターを慎重にマッチングする - 最良の結果を得るには同じバッチのモーターを使用
- 慣らし運転期間 - ベアリングを定着させるために数フライト後にパフォーマンスが向上するモーターもある
カスタム改造
実験する意欲のある人のために:
- ベアリングのアップグレード - 純正ベアリングをプレミアムオプションに交換
- ベルのカスタム改造 - 一部のパイロットは戦略的な冷却穴を開ける
- シャフトのアップグレード - 耐久性向上のためのチタン製交換シャフト
- カスタムバランス調整 - 工場出荷時のバランス以上の最大限のパフォーマンスのために
- 巻線の改造 - 上級ユーザーは特定の特性を得るためにモーターを巻き直すことができる
レーシングの秘訣
競技レーサーがよく行うこと:
- モーターのアンダーチルト - モーターを少し後ろに傾けることで前進飛行の効率が向上
- 軽量ベルの使用 - 耐久性を犠牲にして応答性を向上
- モーターを限界まで回す - 寿命を犠牲にして最大のパフォーマンスを得る
- モーターをトラックに合わせる - テクニカルトラックと高速トラックで異なるモーターを使用
- デシンク調整 - デシンクの問題を防ぐためにESCのパラメーターを慎重に調整
長寿命化の最適化
モーターの寿命を最大限に延ばすために:
- スロットルを80%以下に抑えることを心がけましょう
- アグレッシブなフライトの合間にはクーリングタイムを設ける
- 定期的に温度チェックを行う
- クラッシュ後は点検とクリーニングを行う
- 保管には注意が必要 - 湿気や極端な温度は避けましょう
モーター技術の今後のトレンド
今後は以下のようなことが予想されます:
- さらなる統合化 - モーター/ESC/プロペラの一体型システム
- センサーとテレメトリーを内蔵したスマートモーター
- 軽量化と放熱性を高める新素材
- 設計と素材の改良による効率の向上
- 新しいドローンカテゴリーに特化した専用設計
FAQ: ドローンモーターに関するよくある質問
自分のドローンにはどのサイズのモーターを使えばいいの?
フレームサイズと使用目的から始めましょう。標準的な5インチのフリースタイルクアッドなら、2207か2306のモーターが優れたオールラウンダーです。レーシング用なら、やや小さめの2205か2206モーターを検討しましょう。3インチ未満のマイクロビルドなら、1303-1404サイズのモーターを見てみましょう。フレームサイズとフライトスタイルの両方に合わせてモーターを選びます。レーシングにはより高いKV、フリースタイルにはミディアムKV、ロングレンジ/シネマティックビルドにはより低いKVモーターが最適です。
モーターのKVって実際には何を意味するの?
KV(キロ回転数)は、無負荷時に1ボルトあたりのモーターの理論上の回転数(RPM)を表します。2400KVのモーターに4Sバッテリーで16.8V(フル充電時)の電力を供給すると、理論上はプロペラなしで40,320RPMで回転します。実際には、プロペラの負荷やその他の非効率性により、実際のRPMはより低くなります。KVが高いほど回転は速くなりますがトルクは低下し、KVが低いほどトルクは増しますが最大回転数は遅くなります。
モーターのベアリングはどれくらい重要?
非常に重要です。ベアリングは通常、モーターで最初に故障する部品です。高品質のベアリングは、より滑らかな動作、より良い効率、そしてはるかに長い寿命を提供します。モーターから軋むような音がしたり、ベルを手で回したときにざらざらした感触がする場合は、ベアリングが摩耗している可能性があります。真剣なパイロットにとって、日本製やヨーロッパ製のベアリングにアップグレードすることで、モーターの寿命を大幅に向上させることができます。
同じドローンに異なるモーターを混在させることはできる?
技術的には可能ですが、お勧めできません。同じサイズとKVでも、モーターによって性能特性が少し異なることがあります。これにより、ハンドリングのバランスが崩れ、チューニングが難しくなる可能性があります。どうしても1つの損傷したモーターを交換する必要がある場合は、可能であれば同じ製造バッチの全く同じモデルを入手するようにしましょう。
自分のビルドに合ったモーターサイズかどうかはどうやって判断すればいい?
フライト後にモーター温度を確認します。温かいくらいで、触れないほど熱くならないのが理想的です(60°C以下が理想)。非常に熱い場合は、モーターがビルドに対して小さすぎるか、プロペラが攻撃的すぎる可能性があります。また、ホバリングスロットル位置を見てみましょう。理想的には、ドローンは30-40%程度のスロットルでホバリングするはずです。ホバリングにかなり多くのスロットルが必要な場合は、モーターが小さすぎるか、パフォーマンスが不足している可能性があります。
モーターサイズとKVのどちらが重要?
どちらも重要ですが、役割が異なります。モーターサイズ(ステーターの寸法)は、パワーポテンシャルとトルクを決定し、KVはそのパワーがRPMとトルクの観点からどのように伝達されるかを決定します。特定のバッテリー電圧に対して、KVが高いほどRPMは高くなりますがトルクは低下し、ステーターサイズが大きいほど全体的なパワー性能が高くなります。フリースタイルクアッドなら2207 2300KVモーター、ロングレンジビルドなら2507 1700KVモーターを使うなど、両方を特定の要件に合わせましょう。
モーターはどのくらいの頻度で交換すべき?
適切なメンテナンスを行えば、高品質のモーターは数百回のフライトに耐えられます。以下の場合はモーターを交換しましょう:
- メンテナンス後もベアリングの音がうるさい、または粗くなった
- 性能が著しく低下した
- 巻線が損傷した
- シャフトが修理不能なほど曲がった
- ベルにひびが入ったり損傷した
- マグネットが緩んだり損傷した
多くの問題はベアリング交換で修正できます。これは、モーター全体を交換するよりもはるかに経済的です。
高価なモーターは本当に予算オプションよりも性能が良いの?
多くの場合はそうですが、収穫逓減の法則があります。予算($10)からミッドレンジ($20)のモーターへの移行は、通常、性能、一貫性、信頼性に大きな改善をもたらします。しかし、ミッドレンジとプレミアム($30以上)のモーターの違いは、しばしばより微妙で、経験豊富なパイロットや競争シナリオでのみ顕著になることがあります。ほとんどの趣味パイロットにとって、評判の良いメーカーのミッドレンジモーターが最高の価値を提供します。私の経験では、$18-25の範囲が最もスイートスポットで、プレミアム価格なしでほとんどの性能上の利点が得られます。
クラッシュ後にモーターが損傷しているかどうかはどうやって判断すればいい?
クラッシュ後は、以下のチェックを行います:
- ベルを手で回してみる - 軋みや引っかかりなくスムーズに回転するはずです
- ベル、シャフト、ベースに物理的な損傷がないか確認する
- 巻線の露出や配線の損傷の兆候がないか確認する
- 平らな面の上でシャフトを転がして、まっすぐであることを確認する
- すべてのマグネットが固定されていて所定の位置にあることを確認する
- 飛行前に、非常に低いスロットル入力でモーターをテストする
これらのチェックに合格しても、次のフライト中はモーターを注意深く監視しましょう。異常な振動、熱、ノイズは、隠れた損傷の兆候である可能性があります。
モーターの「N」版と「P」版の違いは何?
一部のメーカーは、同じモーターの通常(「N」)版とパワー(「P」)版を提供しています。「P」版は通常、最大出力を引き出すために設計されたより攻撃的な巻線構成を持っていますが、多くの場合効率を犠牲にしています。これらは、飛行時間よりも最大推力を優先するレーシングやエクストリームフリースタイル向けです。ほとんどのパイロットにとって、標準の「N」版の方が性能と効率のバランスが良いでしょう。
結論
FPVドローンに適したモーターを選ぶことは、ビルドプロセスにおいて最も重要な決定の1つです。完璧なモーターとは、必ずしも最も強力なものや高価なものではありません。それは、特定の要件、フライトスタイル、他のコンポーネントに最もマッチしたものなのです。
初心者の方には、評判の良いメーカーの標準サイズ(5インチのフリースタイルクアッドなら1800-2300KVの2306または2207)のミッドレンジモーターから始めることをお勧めします。スキルと好みを磨いていくうちに、進化するフライトスタイルに合わせてより専門的なオプションを試してみることができます。
モーターの性能は複雑なシステムの一部に過ぎないことを忘れないでください。最高のモーターでも、プロペラの組み合わせが悪かったり、ESCが不十分だったり、チューニングが悪かったりすると、うまく機能しません。ビルドに総合的なアプローチを取り、すべてのコンポーネントが調和して機能するようにしましょう。
FPVモーターの状況は、メーカーが出力、効率、信頼性の限界に常に挑戦しているため、急速に進化し続けています。このガイドで取り上げた基本原理と仕様を理解することで、これらの変化に対応し、ビルドに関する情報に基づいた決定を下すことができるようになるでしょう。
ドローンを初めて作る人でも、50機目を作る人でも、このガイドがあなたの飛行の夢にぴったりのモーターを見つけるのに役立つことを願っています。ハッピーフライト!
参考文献とさらなる読み物
外部リソース
- Miniquad Test Bench - 包括的なモーターテストデータ
- Joshua BardwellのYouTubeチャンネル - 詳細なモーターの説明とチュートリアル
- eCalcモーター計算機 - さまざまなプロペラとバッテリーを使用したモーターのパフォーマンスを推定するツール


