Moteurs de drones : sélection, performance et optimisation
Les moteurs sont le cœur battant de tout drone FPV, influençant directement tout, de l'autonomie de vol et l'agilité à la vitesse maximale et les caractéristiques de pilotage. Après avoir construit des centaines de drones et testé d'innombrables combinaisons de moteurs au fil des années, j'ai appris que la sélection des moteurs est à la fois un art et une science, qui peut faire ou défaire votre expérience de vol. Ce guide complet vous expliquera tout ce que vous devez savoir sur les moteurs de drones FPV, des principes de base aux techniques d'optimisation avancées.
Introduction aux moteurs de drones FPV
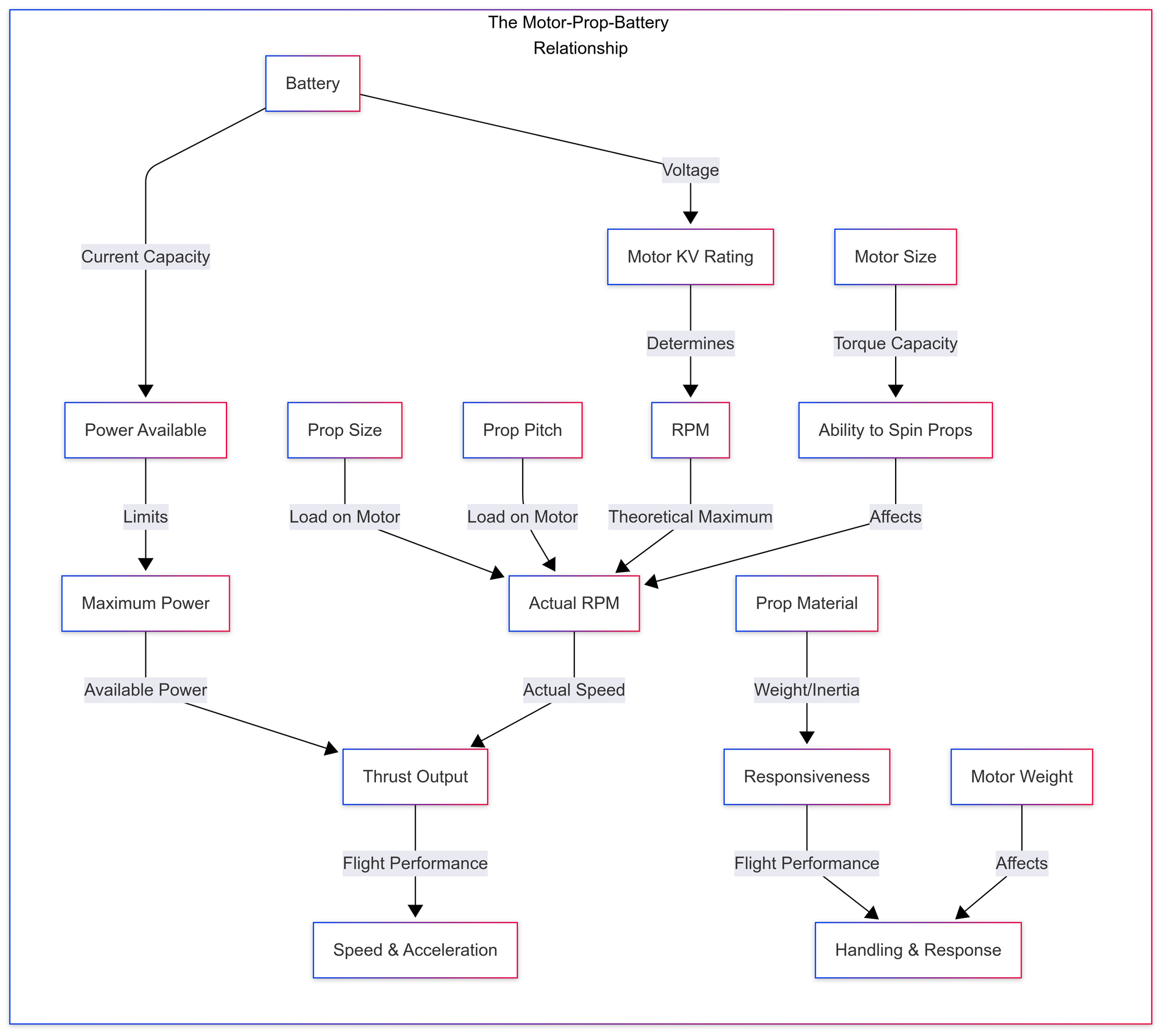
Les drones FPV (First Person View) reposent sur des moteurs électriques sans balais pour générer la poussée nécessaire au vol. Ces moteurs convertissent l'énergie électrique de votre batterie en rotation mécanique, qui entraîne vos hélices pour créer de la portance et de la manœuvrabilité.
Les moteurs que vous choisissez définiront fondamentalement le caractère de votre drone :
- La puissance et la poussée déterminent votre accélération et votre vitesse maximale
- Le poids affecte l'agilité et l'autonomie de vol
- Le taux de réponse influence la précision et le contrôle du pilotage
- L'efficacité impacte la durée de vie de la batterie et la durée de vol
- La durabilité détermine leur résistance aux crashs et aux atterrissages brutaux
Que vous construisiez votre premier drone ou que vous optimisiez votre dixième rig de course, comprendre la technologie des moteurs est essentiel pour créer une configuration qui correspond à vos objectifs de vol.
Histoire et évolution des moteurs de drones
Le développement des moteurs pour drones représente un fascinant voyage d'innovation technologique qui a permis le hobby FPV moderne tel que nous le connaissons aujourd'hui.
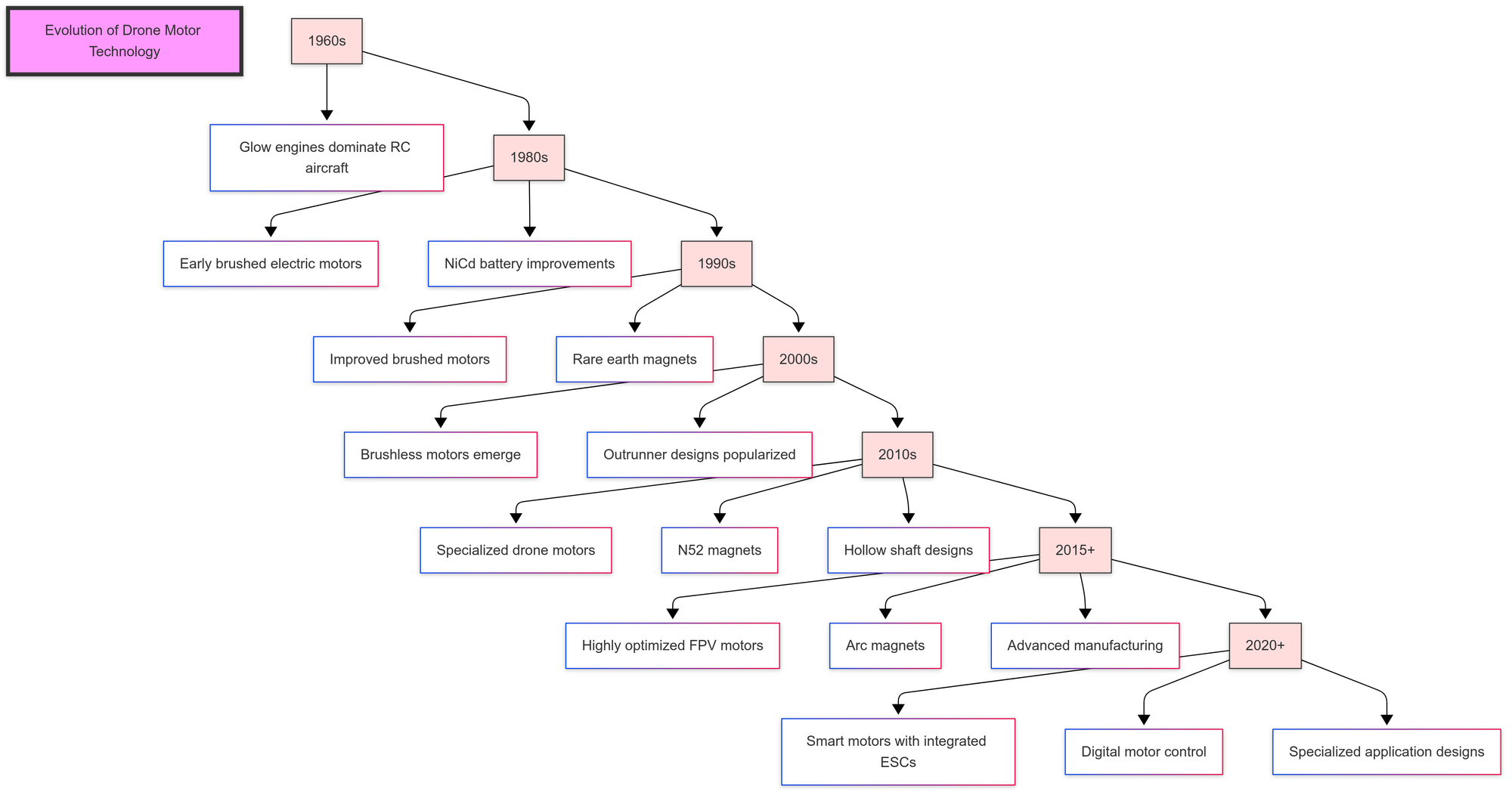
Premiers moteurs RC (années 1960-1990)
Les premiers avions radiocommandés utilisaient des moteurs à combustion (moteurs à combustion interne miniatures) ou des moteurs électriques à balais :
- Années 1960-1970 : Les moteurs à combustion dominaient les avions RC, avec des options électriques limitées
- Années 1980 : Les premiers moteurs à balais sont devenus plus viables avec les améliorations des batteries NiCd
- Années 1990 : Des moteurs à balais de meilleure qualité avec des aimants en terres rares ont amélioré les performances
Ces premiers systèmes électriques étaient lourds, inefficaces et limités en puissance, rendant le véritable vol acrobatique difficile.
Révolution des moteurs sans balais (années 2000)
Le début des années 2000 a vu l'émergence des moteurs sans balais pour les applications RC :
- 2000-2005 : Premiers moteurs sans balais et ESC commercialement viables
- 2005-2010 : Les conceptions à rotor externe (où la cloche tourne autour du stator) sont devenues populaires pour leur couple plus élevé
- 2007-2010 : Les hélicoptères RC ont stimulé l'innovation dans la conception et le contrôle des moteurs
Ces premiers moteurs sans balais étaient principalement conçus pour les avions à voilure fixe et les hélicoptères, pas pour les drones multirotors que nous connaissons aujourd'hui.
L'ère des multirotors (2010-2015)
L'explosion des drones multirotors a créé une demande pour des moteurs spécialisés :
- 2010-2012 : Première génération de moteurs dédiés aux multirotors (conceptions grandes et lourdes)
- 2012-2013 : Introduction du format de taille commun "22XX"
- 2013-2014 : Les techniques de fabrication améliorées ont réduit le poids
- 2014-2015 : Les aimants N52 sont devenus la norme, améliorant considérablement la densité de puissance
J'ai vu certains moteurs "haute performance" de cette époque - ils étaient considérés comme puissants à l'époque mais seraient ridiculement lourds et sous-alimentés selon les normes d'aujourd'hui.
Développement moderne des moteurs FPV (2015-présent)
Ces dernières années ont vu des progrès rapides dans la technologie des moteurs spécifiquement pour les applications FPV :
- 2015-2017 : Moteurs de course spécialisés avec des conceptions légères
- 2017-2018 : Introduction des arbres en titane et des conceptions de cloche avancées
- 2018-2019 : Aimants en arc et entrefers optimisés pour l'efficacité
- 2019-2020 : Conceptions ultra-légères avec une durabilité améliorée
- 2020-présent : Moteurs intelligents avec ESC intégrés et systèmes de contrôle numériques
Le rythme d'innovation a été remarquable - les moteurs sont devenus simultanément plus légers, plus puissants, plus efficaces et plus durables sur une période relativement courte.
Principes fondamentaux des moteurs sans balais
Moteurs sans balais vs moteurs à balais
Les premiers avions RC utilisaient des moteurs à balais, qui ont des balais physiques en contact avec un commutateur pour créer la rotation. Bien que simples et peu coûteux, ces moteurs souffrent de :
- Efficacité plus faible
- Durée de vie réduite due à l'usure des balais
- Densité de puissance limitée
- Exigences d'entretien plus élevées
Les drones FPV modernes utilisent des moteurs CC sans balais (BLDC), qui éliminent les balais physiques au profit d'une commutation électronique. Cette avancée apporte :
- Efficacité plus élevée (80-90% contre 50-60% pour les moteurs à balais)
- Durée de vie plus longue (pas de balais à user)
- Meilleur rapport puissance/poids
- Meilleure dissipation de la chaleur
- Exigences d'entretien réduites
Composants des moteurs sans balais
Comprendre les composants physiques d'un moteur sans balais aide à évaluer la qualité et l'adéquation pour différentes applications :
- Cloche (Rotor) : La partie rotative extérieure qui maintient les aimants et se fixe à l'hélice.
- Stator : Le noyau intérieur fixe avec des enroulements de cuivre. La taille du stator est une spécification clé (plus de détails plus tard).
- Aimants : Généralement fabriqués à partir d'alliages de néodyme (N52, N54, etc.), ils créent le champ magnétique qui interagit avec les enroulements du stator.
- Enroulements : Fil de cuivre enroulé autour des pôles du stator selon des schémas spécifiques (configuration Delta ou Wye).
- Roulements : Supportent la cloche rotative et réduisent les frottements. Des roulements de qualité sont essentiels pour la longévité et les performances.
- Arbre moteur : Relie la cloche aux roulements et se prolonge pour monter l'hélice.
- Base/Support : La partie inférieure avec des trous de montage pour fixer le moteur au châssis de votre drone.
Comment fonctionnent les moteurs sans balais
Les moteurs sans balais fonctionnent selon des principes électromagnétiques :
- Le contrôleur ESC (Electronic Speed Controller) envoie des impulsions électriques précisément synchronisées aux enroulements du moteur
- Ces impulsions créent des champs électromagnétiques dans le stator
- Les champs électromagnétiques interagissent avec les aimants permanents de la cloche
- Cette interaction crée une force de rotation (couple)
- L'ESC ajuste en permanence le timing et la force de ces impulsions pour contrôler la vitesse et la direction
C'est cette commutation électronique qui rend les moteurs sans balais si efficaces et réactifs. Lorsque je pousse dans un circuit technique serré, je peux sentir la réponse immédiate d'une combinaison moteur/ESC de qualité - il n'y a pratiquement aucun délai entre l'entrée du manche et la réaction du moteur.
Comprendre les spécifications des moteurs
Déchiffrer les spécifications des moteurs est essentiel pour faire des choix éclairés. Décomposons les paramètres clés :
Désignation de la taille du moteur
Les moteurs FPV sont généralement étiquetés avec un nombre à quatre chiffres, comme 2207 ou 2306. Cette notation vous indique les dimensions physiques du stator :
- Deux premiers chiffres : Largeur du stator (diamètre) en mm
- Deux derniers chiffres : Hauteur du stator en mm
Par exemple, un moteur 2207 a un stator de 22 mm de large et 7 mm de haut.
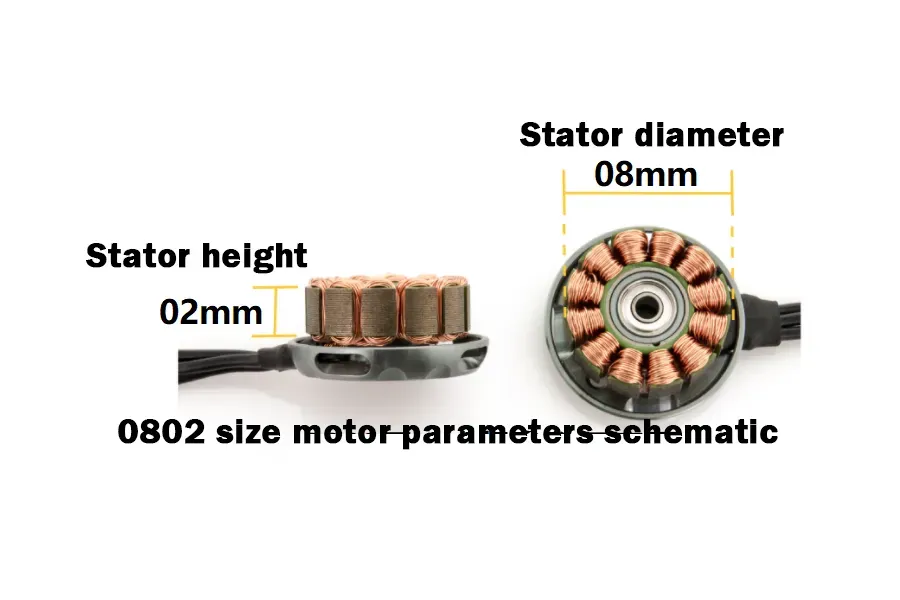

En général :
- Largeur de stator plus grande = plus de couple
- Hauteur de stator plus élevée = plus de puissance et de performances en haut de gamme
D'après mon expérience, la différence entre une largeur de stator de 22 mm et 23 mm peut sembler faible sur le papier, mais peut complètement transformer la sensation d'un drone en vol. Mon build freestyle 2207 a une réponse nettement plus vive que ma configuration 2306 par ailleurs identique, qui semble plus douce et linéaire dans la délivrance de puissance.
Indice KV
Le KV (Kilo-Velocity) représente le nombre théorique de tours par minute (RPM) que le moteur effectuera par volt appliqué sans charge :
- Un moteur 2400KV sur une batterie 4S (16,8V complètement chargée) tournerait théoriquement à 40 320 RPM (2400 × 16,8) sans hélice
En pratique, le RPM réel sera inférieur en raison de la charge et des inefficacités. L'indice KV a des implications significatives :
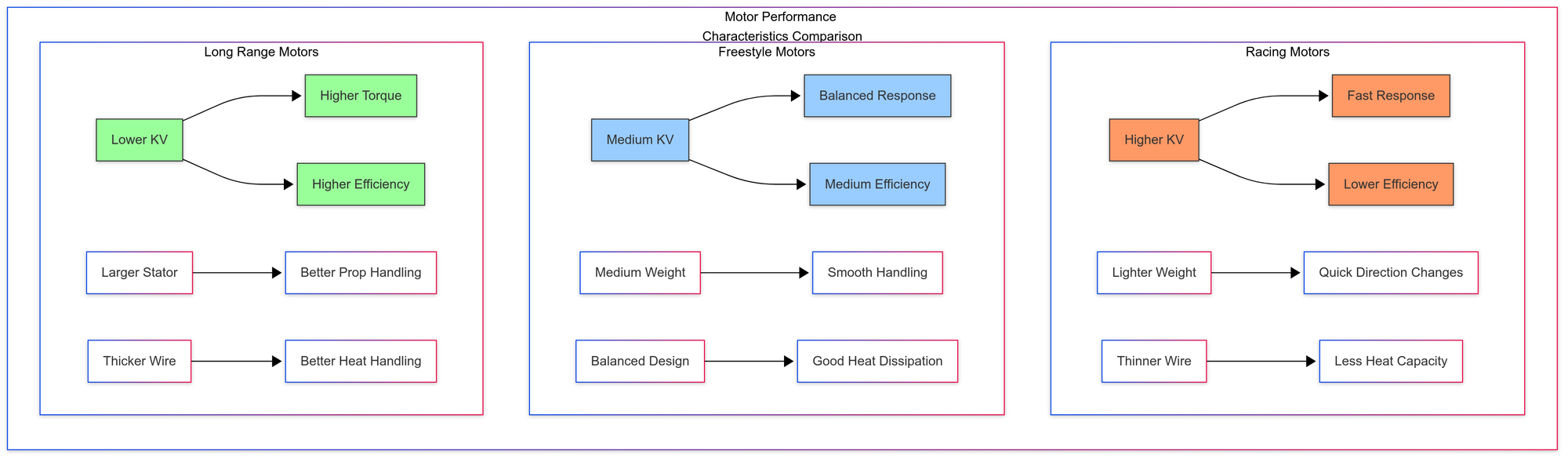
- KV plus élevé (2400KV+) : Plus de vitesse de pointe, réponse plus rapide, mieux adapté à la course et aux petites hélices
- KV moyen (1700-2300KV) : Performances équilibrées, bon pour le freestyle et le vol polyvalent
- KV plus faible (1300-1600KV) : Plus de couple, meilleure efficacité, adapté aux grandes hélices et aux vols longue distance
Une erreur que j'ai faite au début de mon parcours FPV était de toujours choisir les moteurs avec le KV le plus élevé disponible, pensant que "plus rapide est mieux". J'ai vite appris que des moteurs ultra-haut KV sur un quad freestyle le rendaient nerveux et difficile à piloter en douceur, sans parler de la durée de vol considérablement réduite.
Impact de la taille du stator
La taille du stator affecte directement les performances du moteur :
| Taille du stator | Cas d'utilisation typique | Caractéristiques |
|---|---|---|
| 1105-1306 | Micro quads (2-3") | Léger, puissance plus faible, efficace |
| 1407-1506 | Mini quads (3-4") | Bon équilibre entre poids et puissance |
| 2004-2206 | Quads de taille moyenne (4-5") | Réactif, bon pour le vol technique |
| 2207-2306 | Quads 5" standard | Puissants et polyvalents |
| 2407-2507 | Freestyle lourd/cinématique | Puissance maximale, supporte de lourdes charges utiles |
| 2807-2912 | Longue portée 7"+ | Couple élevé pour grandes hélices |
Des stators plus grands peuvent produire plus de puissance mais ajoutent du poids. Le point idéal dépend de la taille de votre châssis, de la batterie et de votre style de vol.
Force et types d'aimants
Les aimants sont classés selon leur force, les nombres plus élevés indiquant une force magnétique plus importante :
- N48 : Force standard
- N52 : Fort, courant dans les moteurs de milieu de gamme
- N54/N55 : Très fort, présent dans les moteurs haut de gamme
Des aimants plus puissants fournissent plus de couple et de réactivité mais peuvent réduire l'efficacité et augmenter la température du moteur. Certains fabricants utilisent des aimants en arc (courbés pour épouser la circonférence de la cloche) plutôt que des aimants droits traditionnels, revendiquant une meilleure efficacité.
Après avoir grillé plusieurs moteurs avec des aimants plus faibles qui se sont démagnétisés après de violents crashs, j'ai constaté qu'investir dans des moteurs avec des aimants N52 ou supérieurs est rentable en termes de longévité, surtout pour le vol freestyle où les impacts sont inévitables.
Configurations de bobinage
Les bobinages des moteurs peuvent être arrangés selon différents schémas :
- Delta : Trois connexions, généralement plus puissant à des régimes plus élevés
- Wye (Étoile) : Trois connexions avec une prise centrale, généralement plus efficace à des régimes plus faibles
La plupart des moteurs FPV utilisent des bobinages Delta pour leurs caractéristiques de performance, mais certains fabricants expérimentent des schémas de bobinage hybrides ou modifiés pour des objectifs de performance spécifiques.
Considérations de poids
Le poids du moteur est un facteur critique qui affecte :
- Les caractéristiques de vol : Des moteurs plus légers signifient un pilotage plus agile
- Le poids total : Impacte le temps de vol et les performances
- La masse en rotation : Affecte la réactivité aux changements de gaz
Les moteurs modernes ont tendance à être plus légers tout en maintenant la puissance, avec des options haut de gamme utilisant des arbres en titane et des cloches en alliage d'aluminium/magnésium pour réduire le poids sans sacrifier la résistance.
Capacités de gestion de la puissance
La capacité d'un moteur à gérer la puissance est généralement mesurée en watts et est déterminée par :
- La masse de cuivre dans les bobinages
- La capacité de dissipation thermique
- La qualité de construction
Les fabricants fournissent souvent des spécifications comme "puissance continue maximale" et "puissance en crête", bien que celles-ci doivent être considérées comme des directives plutôt que des limites absolues.
J'ai appris à être sceptique quant aux revendications de puissance après avoir vu un moteur soi-disant "capable de 1200W" fondre après seulement 30 secondes à environ 800W lors d'un test sur banc. Les moteurs de qualité de fabricants réputés ont tendance à être plus conservateurs dans leurs évaluations.
Guide de sélection des moteurs
Choisir les bons moteurs implique de faire correspondre leurs caractéristiques à votre configuration spécifique et à vos objectifs de vol.
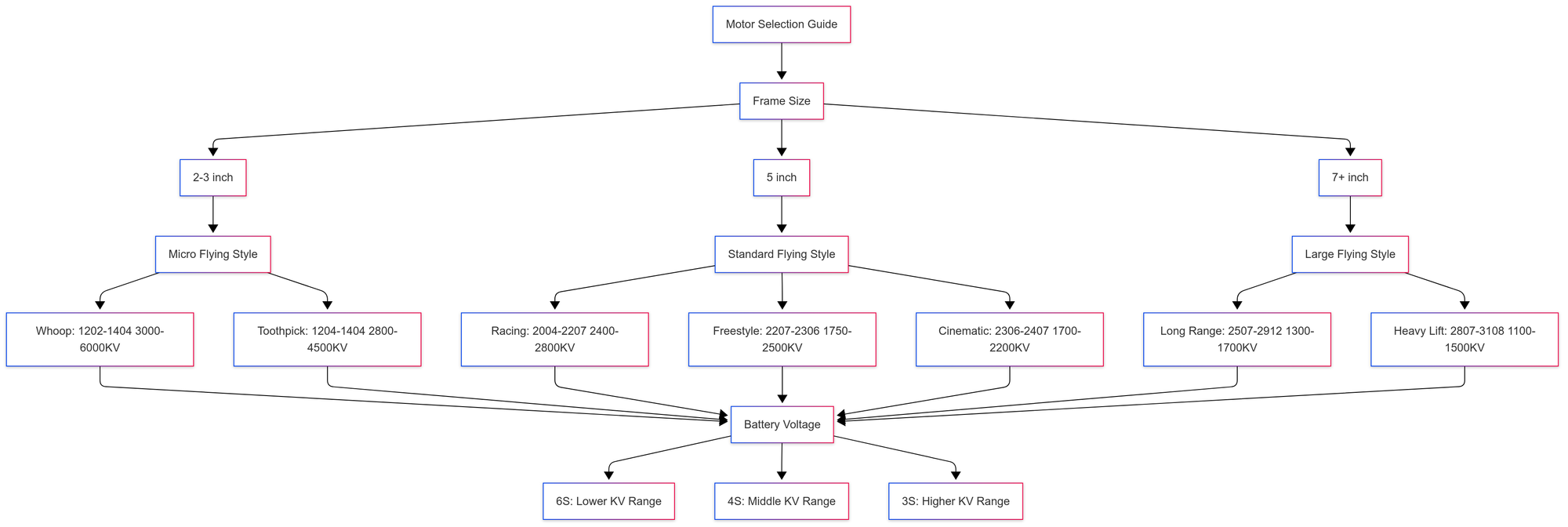
Faire correspondre les moteurs à la taille du châssis
La taille du châssis dicte en grande partie les choix de moteurs appropriés :
| Taille du châssis | Tailles de moteur recommandées | Plage de KV typique |
|---|---|---|
| 2-3" Micro | 1105-1306 | 3000-6000KV |
| 3" Toothpick | 1204-1404 | 2800-4500KV |
| 3.5" Cinewhoop | 1404-1506 | 2600-3600KV |
| 4" Léger | 1606-2004 | 2400-3200KV |
| 5" Freestyle | 2205-2306 | 1750-2500KV |
| 5" Racing | 2004-2207 | 2400-2800KV |
| 6" Freestyle | 2306-2407 | 1600-2000KV |
| 7"+ Longue portée | 2507-2912 | 1300-1700KV |
Ce sont des points de départ - vos besoins spécifiques peuvent nécessiter des variations par rapport à ces recommandations.
Considérations pour différents styles de vol
Différents styles de vol exigent différentes caractéristiques de moteur :
Course
- Priorité : Vitesse, accélération, réactivité
- Recommandé : Poids plus faible, KV plus élevé (2400-2800KV pour 5")
- Taille du stator : Souvent un diamètre légèrement plus petit mais plus haut (par ex. 2207)
- Notes : Les moteurs de course privilégient les performances en rafale par rapport à la durabilité et l'efficacité
J'ai constaté que les configurations dédiées à la course bénéficient de moteurs avec un poids et une inertie légèrement inférieurs, même au détriment de la puissance. La capacité à changer rapidement de direction compte souvent plus que la poussée absolue sur des circuits techniques.
Freestyle
- Priorité : Délivrance de puissance en douceur, durabilité, bonne résolution des gaz
- Recommandé : KV moyen (1800-2300KV pour 5")
- Taille du stator : Équilibré (par ex. 2306, 2207)
- Notes : Doit gérer des vols variés, du vol en douceur aux manœuvres agressives
Pour le freestyle, je préfère les moteurs avec un peu plus de masse de stator qui offrent une réponse des gaz plus douce et une meilleure maniabilité à la fois dans les mouvements lents et précis et dans les figures à haute puissance.
Cinématique/Longue portée
- Priorité : Efficacité, fonctionnement en douceur, fiabilité
- Recommandé : KV plus faible (1300-1800KV pour 5-7")
- Taille du stator : Souvent plus grand pour le couple avec de grandes hélices (par ex. 2407, 2507)
- Notes : Doit équilibrer les besoins en puissance avec l'efficacité pour des temps de vol prolongés
Sur mes configurations longue portée, j'ai constaté que des moteurs légèrement surdimensionnés fonctionnant à des pourcentages de gaz plus faibles offrent une meilleure efficacité que des moteurs plus petits fonctionnant à des gaz plus élevés. Cette approche contre-intuitive a ajouté des minutes à mes temps de vol.
Configurations micro
- Priorité : Économie de poids, puissance adéquate
- Recommandé : KV plus élevé (3000-6000KV selon la taille)
- Taille du stator : Aussi petit que possible tout en répondant aux besoins en puissance
- Notes : Chaque gramme compte ; même de petites différences de poids sont perceptibles
Rapports puissance/poids
Une métrique utile pour évaluer la pertinence d'un moteur est le rapport poussée/poids de la configuration complète :
- Course : Rapport de 12:1 à 15:1 (extrêmement réactif, temps de vol plus courts)
- Freestyle : Rapport de 8:1 à 12:1 (bon équilibre entre réactivité et temps de vol)
- Cinématique : Rapport de 5:1 à 8:1 (vol plus doux, temps de vol plus longs)
- Longue portée : Rapport de 3:1 à 5:1 (efficacité maximale, vol stable)
Ces rapports représentent la poussée totale disponible divisée par le poids total du drone.
Principes d'appariement des moteurs et des hélices
Les moteurs et les hélices doivent être soigneusement appariés :
- Les hélices plus grandes nécessitent des moteurs avec plus de couple (diamètre de stator plus grand)
- Les hélices à pas plus élevé mettent plus de charge sur les moteurs et peuvent nécessiter un KV plus faible
- Les hélices plus lourdes augmentent la température du moteur et réduisent la réactivité
Une ligne directrice générale pour les quads 5" :
- Hélices 5x4x3 (5", 4" de pas, 3 pales) : Fonctionnent bien avec des moteurs 2300-2600KV
- Hélices 5x5x3 : Mieux adaptées aux moteurs 1900-2300KV
- Hélices 5x4.5x2 : Peuvent utiliser un KV plus élevé (2400-2800KV) pour la course
J'ai essayé une fois d'utiliser des hélices agressives 5x4.3x3 sur des moteurs à KV élevé (2750KV) en 6S, et bien que la poussée était incroyable, les moteurs devenaient tellement chauds que je pouvais les sentir après un vol de 2 minutes. Un appariement approprié est crucial pour la longévité.
Considérations sur la tension de la batterie
Le KV du moteur doit être adapté à la tension de votre batterie :
| Batterie | Plage de KV pour 5" | Notes |
|---|---|---|
| 3S (12.6V) | 2600-3000KV | Moins courant maintenant, mais encore utilisé pour certaines configurations de course |
| 4S (16.8V) | 2300-2600KV | Bon équilibre, populaire pour le freestyle |
| 5S (21.0V) | 1900-2300KV | Gagne en popularité, bon équilibre puissance/efficacité |
| 6S (25.2V) | 1700-2000KV | Puissance maximale, populaire pour le freestyle et le cinématique |
Les systèmes à tension plus élevée (6S) avec des moteurs à KV inférieur appropriés offrent généralement :
- Une meilleure efficacité
- Une puissance plus constante tout au long de la décharge de la batterie
- Un appel de courant plus faible pour la même puissance de sortie
- Moins d'affaissement de tension sous charge
Métriques de performance du moteur
Comprendre les performances des moteurs nécessite d'aller au-delà des spécifications et d'examiner les données de performance réelles.
Explication des tests de poussée
Les tests de poussée mesurent la force réelle produite par une combinaison moteur/hélice à différents niveaux de gaz :
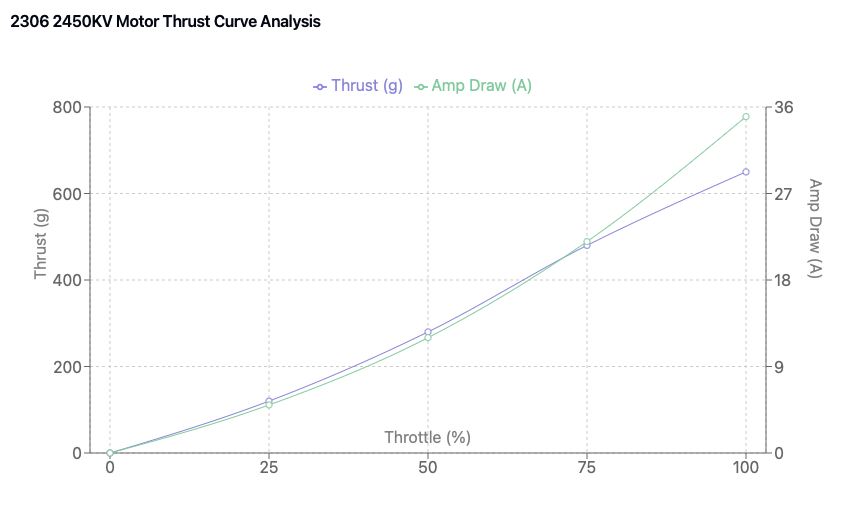
Les métriques clés des tests de poussée comprennent :
- Poussée maximale : Force maximale produite à 100% des gaz
- Courbe de poussée : Comment la poussée augmente linéairement avec l'entrée des gaz
- Efficacité : Poussée produite par watt de puissance consommée
- Appel de courant : Consommation de courant à différents niveaux de gaz
J'ai construit mon propre banc de test de poussée, et les résultats contredisent souvent les affirmations des fabricants. Certains moteurs annoncés comme "haute poussée" produisent en réalité moins de force que des options plus modestes mais chauffent beaucoup plus.
Interprétation des graphiques de données de poussée
Lors de l'examen des données de test de poussée :
- Regardez au-delà de la poussée maximale - Un moteur qui produit un peu moins de poussée maximale mais a une courbe de poussée plus linéaire offre souvent une meilleure maniabilité.
- Considérez la poussée aux positions typiques des gaz - La plupart des vols se font entre 20 et 60% des gaz, donc les performances dans cette plage sont plus importantes que la poussée maximale.
- Comparez l'efficacité - Deux moteurs peuvent produire une poussée similaire, mais si l'un consomme beaucoup moins de courant, il offrira des temps de vol plus longs.
- Vérifiez l'augmentation de température - Une chaleur excessive indique une inefficacité et des problèmes potentiels de longévité.
Considérations sur l'efficacité
L'efficacité du moteur (poussée par watt) varie sur la plage des gaz :
- La plupart des moteurs sont les plus efficaces à 30-60% des gaz
- L'efficacité chute considérablement à très faible et très forte accélération
- Les stators plus grands ont tendance à être plus efficaces avec des hélices plus grandes
- Les moteurs à KV plus élevé sacrifient généralement une certaine efficacité pour la réactivité
Pour les configurations longue portée, je donne la priorité aux moteurs qui maintiennent une bonne efficacité dans la plage des gaz de 30 à 50%, car c'est là que le drone passera la majeure partie de son temps de vol.
Gestion de la température
La température du moteur est un indicateur critique d'un appariement et d'une configuration appropriés :
- Température de fonctionnement normale : Chaud au toucher mais pas inconfortable à tenir (40-60°C)
- Plage de précaution : Trop chaud pour être touché confortablement (60-80°C)
- Zone de danger : Trop chaud pour être touché du tout (80°C+)
Facteurs affectant la température du moteur :
- Valeur KV (KV plus élevé = plus de chaleur)
- Taille et pas de l'hélice (plus agressif = plus de chaleur)
- Style de vol (manœuvres agressives = plus de chaleur)
- Température ambiante
- Flux d'air de refroidissement
J'ai développé l'habitude de toucher mes moteurs après chaque vol - c'est une vérification simple qui m'a évité d'endommager de nombreux moteurs en m'alertant des problèmes potentiels avant une défaillance.
Caractéristiques de bruit
Le bruit du moteur peut indiquer les caractéristiques de performance :
- Son doux et grave : Indique généralement un fonctionnement efficace
- Sifflement aigu : Peut indiquer un régime très élevé, poussant potentiellement les limites
- Son grinçant ou irrégulier : Pourrait indiquer des problèmes de roulements ou un déséquilibre
- Résonance à certaines positions des gaz : Peut indiquer des problèmes de vibrations
Au-delà d'être gênant, un bruit excessif est souvent corrélé à une inefficacité et peut signaler des problèmes potentiels.
Concepts avancés sur les moteurs
Pour ceux qui cherchent à optimiser davantage les performances, ces concepts avancés peuvent aider à affiner la sélection et la configuration des moteurs.
Optimisation de l'entrefer
L'entrefer est la distance entre le stator et les aimants :
- Entrefer plus petit : Plus puissant, plus réactif, mais potentiellement moins efficace
- Entrefer plus grand : Plus efficace, fonctionne plus froid, mais moins puissant
Les moteurs haut de gamme ont souvent des entrefers précisément optimisés qui équilibrent performance et efficacité.
Types et qualité des roulements
Les roulements sont des composants essentiels qui affectent les performances et la longévité :
- Roulements standard : Adéquats pour un vol occasionnel
- Roulements étanches : Meilleure protection contre la poussière et l'humidité
- Roulements en céramique : Friction réduite, durée de vie plus longue, coût plus élevé
- Roulements hybrides : Billes en céramique avec cages en acier, bon équilibre entre performance et coût
J'ai constaté que le passage à des roulements japonais de qualité (même en acier standard) apporte une différence notable dans la douceur et la longévité du moteur par rapport aux roulements chinois génériques que l'on trouve dans les moteurs bon marché.
Conception et matériaux de la cloche
La conception de la cloche affecte le poids, le refroidissement et la durabilité :
- Cloches standard : Généralement en aluminium, bon équilibre entre poids et résistance
- Cloches légères : Matériau plus fin ou découpes pour réduire le poids
- Conceptions de refroidissement : Découpes ou ailettes supplémentaires pour améliorer le flux d'air
- Variations de matériaux : Certains moteurs haut de gamme utilisent des composants en titane, en alliages de magnésium ou en fibre de carbone
Conceptions à flux simple face vs double face
Les conceptions de moteurs varient dans les schémas de flux magnétique :
- Flux simple face : Aimants uniquement sur le bord extérieur de la cloche, plus léger mais moins puissant
- Flux double face : Aimants à la fois sur le dessus et les côtés de la cloche, plus puissant mais plus lourd
Les conceptions double face deviennent plus courantes dans les moteurs haut de gamme pour leurs avantages en termes de performances, en particulier dans les grandes tailles.
Conceptions d'arbres creux vs pleins
Les arbres de moteur existent en deux conceptions principales :
- Arbre plein : Conception traditionnelle, résistance maximale
- Arbre creux : Poids plus léger, résistance adéquate pour la plupart des applications, meilleur refroidissement
Pour la course et le freestyle, j'ai constaté que les conceptions d'arbres creux offrent une amélioration notable de la réactivité grâce à une masse en rotation réduite.
Aimants arqués vs aimants droits
La forme des aimants affecte les caractéristiques de performance :
- Aimants droits : Conception traditionnelle, plus facile à fabriquer
- Aimants arqués : Courbés pour correspondre à la circonférence de la cloche, potentiellement plus efficaces
Certains fabricants revendiquent des améliorations d'efficacité de 5 à 10 % avec des aimants arqués, bien que les avantages réels varient.
Jauge de fil et techniques de bobinage
Les spécifications de bobinage affectent les performances :
- Jauge de fil : Un fil plus épais (numéro de jauge inférieur) gère plus de courant mais moins de tours s'adaptent dans le stator
- Technique de bobinage : Le bobinage à la main ou à la machine affecte la cohérence et les performances
- Facteur de remplissage : L'efficacité avec laquelle l'espace dans le stator est utilisé par le cuivre
Les moteurs haut de gamme annoncent souvent des "bobinages haute densité" avec de meilleurs facteurs de remplissage, ce qui se traduit par une masse de cuivre plus importante et de meilleures performances.
Installation et configuration
Une installation correcte est cruciale pour des performances et une longévité optimales du moteur.
Techniques de montage appropriées
Lors du montage des moteurs :
- Utilisez des vis appropriées - Trop longues, elles peuvent entrer en contact avec les enroulements, trop courtes, elles ne fixeront pas correctement
- Appliquez du frein-filet - Le frein-filet de résistance moyenne (bleu) empêche le desserrage par vibration
- Vérifiez l'absence de grippage - Assurez-vous que la cloche tourne librement après le montage
- Vérifiez l'alignement - Les moteurs doivent être parfaitement perpendiculaires aux bras

J'ai appris l'importance d'un montage correct à mes dépens après avoir perdu un moteur en vol à cause de vis desserrées par les vibrations. Maintenant, je vérifie le montage des moteurs avant chaque session de vol.
Gestion des fils
Un bon acheminement des fils évite les dommages et les interférences :
- Coupez à la longueur appropriée - L'excès de fil ajoute du poids et peut s'accrocher aux obstacles
- Éloignez-les des hélices - Même avec des protège-hélices, les fils peuvent être coupés
- Fixez-les au châssis - Empêchez les vibrations et les mouvements
- Considérez l'emplacement du contrôleur - Des fils de moteur plus courts réduisent la résistance et le poids

Sens du moteur et orientation des hélices
Les quadricoptères FPV utilisent généralement une configuration "hélices vers l'intérieur" ou "hélices vers l'extérieur" :
- Hélices vers l'intérieur : Les hélices tournent vers l'intérieur à l'avant du quad
- Meilleure maniabilité en vol avant
- Plus efficace en vol avant
- Standard pour la course
- Hélices vers l'extérieur : Les hélices tournent vers l'extérieur à l'avant
- Meilleure autorité en lacet
- Effet de souffle d'hélice réduit
- Populaire pour le freestyle
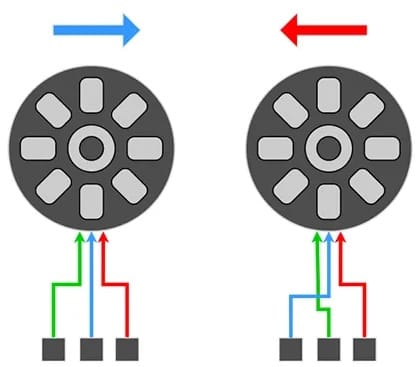
Le sens de rotation du moteur est défini dans le logiciel du contrôleur de vol et par l'ordre de connexion des fils à l'ESC.
Considérations sur l'appariement des ESC
Les moteurs et les ESC doivent être appariés pour des performances optimales :
- Courant nominal : Les ESC doivent être dimensionnés pour au moins le courant maximum du moteur
- Vitesse de réponse : Les ESC de haute qualité offrent un contrôle moteur plus rapide et précis
- Prise en charge des protocoles : Les ESC modernes devraient prendre en charge DShot600 ou plus pour de meilleures performances
- Capacité de télémétrie : Les ESC avec télémétrie fournissent des données précieuses sur les performances du moteur
Meilleures pratiques de soudure
Une bonne soudure est essentielle pour une alimentation électrique fiable :
- Utilisez une chaleur adéquate - 350-380°C pour les fers à souder standard
- Pré-étamez les fils et les plages - Facilite la connexion finale
- Utilisez une soudure de qualité - La soudure au plomb 60/40 ou 63/37 fonctionne le mieux pour les connexions moteur
- Gardez les joints propres - Évitez l'excès de soudure qui pourrait causer des courts-circuits
- Utilisez un calibre de fil approprié - 20AWG est standard pour les moteurs de quad 5", 18AWG pour les plus gros
Une mauvaise soudure est l'une des causes les plus fréquentes de problèmes de performance et de pannes que j'ai constatées. J'ai déjà passé des heures à dépanner un comportement erratique qui s'est avéré être une seule soudure froide sur un fil de moteur.
Maintenance et dépannage
Un entretien approprié prolonge la durée de vie du moteur et prévient les pannes.
Entretien des roulements
Les roulements sont généralement les premiers composants à tomber en panne :
- Nettoyage régulier - Enlevez la poussière et les débris après avoir volé dans des conditions sales
- Lubrification appropriée - Une minuscule goutte d'huile légère peut prolonger la durée de vie des roulements
- Évitez l'exposition à l'eau - Séchez soigneusement si les moteurs sont mouillés
- Écoutez les changements - Une augmentation du bruit indique souvent l'usure des roulements
J'ai fait revivre d'innombrables moteurs "morts" en remplaçant simplement les roulements - une compétence qui vaut la peine d'être apprise si vous êtes sérieux dans ce passe-temps.
Identification des moteurs endommagés
Les signes courants de dommages au moteur comprennent :
- Dommages physiques : Arbres pliés, cloches fissurées ou enroulements endommagés
- Problèmes électriques : Courts-circuits entre phases ou à la masse
- Problèmes de performance : Puissance réduite, chaleur excessive ou vibrations
- Bruits inhabituels : Grincement, cliquetis ou bruit incohérent
Points de défaillance courants
Comprendre les modes de défaillance typiques aide à la prévention :
- Roulements - Généralement le premier composant à tomber en panne
- Enroulements - Peuvent être endommagés par une surchauffe ou un impact physique
- Aimants - Peuvent se fissurer, se déplacer ou se démagnétiser à cause d'impacts ou d'une chaleur excessive
- Arbre - Peut se plier lors de crashs ou d'atterrissages brutaux
- Cloche - Peut se fissurer ou se déséquilibrer à cause d'impacts
Élimination des débris et nettoyage
Un entretien régulier prévient les problèmes :
- Enlevez les débris visibles - Vérifiez les cheveux, ficelles ou matières végétales enroulés autour de la cloche
- Nettoyage à l'air comprimé - Soufflez la poussière et les petites particules
- Vérifiez la contamination - Recherchez de l'huile ou de la saleté sur les enroulements
- Inspectez la corrosion - En particulier après avoir volé près de l'eau salée
Techniques de redressement d'arbre
Les arbres légèrement pliés peuvent parfois être récupérés :
- Identifiez la courbure - Faites rouler le moteur sur une surface plane pour trouver le point haut
- Pression douce - Utilisez un outil moteur ou des pinces avec protection pour appliquer une pression douce
- Testez fréquemment - Vérifiez souvent les progrès pour éviter une sur-correction
- Sachez quand remplacer - Certaines courbures sont trop sévères pour être réparées de manière fiable
J'ai réussi à redresser de nombreux arbres de moteur, mais c'est un processus délicat - trop de force aggravera le problème.
Quand réparer ou remplacer
Directives pour la prise de décision :
- Remplacez si :
- Les enroulements sont endommagés
- Plusieurs aimants sont desserrés ou endommagés
- L'arbre est sévèrement plié
- La cloche est fissurée ou significativement endommagée
- Envisagez une réparation si :
- Seuls les roulements sont usés
- L'arbre est légèrement plié
- Un seul aimant est desserré mais intact
- Les problèmes de performance sont mineurs
Conseils de pro et perspectives d'expert
Après des années de construction, de course et de réparation de drones, j'ai recueilli quelques idées qui vont au-delà des spécifications.
Réglage fin des performances moteur
- Équilibrez vos hélices - Même les hélices d'usine bénéficient d'un équilibrage
- Vérifiez et éliminez les vibrations - Elles réduisent les performances et causent une usure prématurée
- Considérez le timing moteur - Ajuster le timing ESC peut affiner la réponse moteur
- Appariez soigneusement les moteurs - Utilisez des moteurs du même lot pour de meilleurs résultats
- Période de rodage - Certains moteurs fonctionnent mieux après quelques vols pour asseoir les roulements
Modifications personnalisées
Pour ceux qui sont prêts à expérimenter :
- Améliorations des roulements - Remplacement des roulements d'origine par des options haut de gamme
- Modifications de cloche personnalisées - Certains pilotes percent des trous de refroidissement stratégiques
- Améliorations d'arbre - Arbres de remplacement en titane pour la durabilité
- Équilibrage personnalisé - Au-delà de l'équilibre d'usine pour des performances maximales
- Modifications d'enroulement - Les utilisateurs avancés peuvent rebobiner les moteurs pour des caractéristiques spécifiques
Secrets de course
Les coureurs compétitifs souvent :
- Sous-inclinent les moteurs - Incliner légèrement les moteurs vers l'arrière améliore l'efficacité en vol avant
- Utilisent des cloches plus légères - Sacrifient un peu de durabilité pour la réactivité
- Poussent les moteurs à la limite - Acceptent une durée de vie plus courte pour des performances maximales
- Adaptent les moteurs aux circuits - Différents moteurs pour les circuits techniques ou à grande vitesse
- Réglage de désynchronisation - Ajustent soigneusement les paramètres ESC pour éviter les problèmes de désynchronisation
Optimisation de la longévité
Pour une durée de vie maximale des moteurs :
Here is the translated content in French with the original HTML formatting and links updated according to the specified rules:
- Restez en dessous de 80% des gaz pour la plupart des vols
- Laissez le temps de refroidissement entre les vols agressifs
- Vérifiez régulièrement les températures
- Inspectez et nettoyez après les crashs
- Stockez avec soin - Évitez l'humidité et les températures extrêmes
Tendances futures de la technologie des moteurs
Pour l'avenir, nous pouvons nous attendre à :
- Une intégration plus poussée - Systèmes combinés moteur/ESC/hélice
- Des moteurs intelligents avec capteurs et télémétrie intégrés
- De nouveaux matériaux pour un poids plus léger et une meilleure dissipation de la chaleur
- Une efficacité accrue grâce à l'amélioration de la conception et des matériaux
- Des conceptions spécialisées pour les catégories de drones émergentes
FAQ : Questions courantes sur les moteurs de drones
Comment savoir quelle taille de moteurs utiliser pour mon drone ?
Commencez par la taille du cadre et l'utilisation prévue. Pour un quad freestyle standard de 5", les moteurs 2207 ou 2306 sont d'excellents polyvalents. Pour la course, envisagez des moteurs légèrement plus petits de 2205 ou 2206. Pour les micro-constructions de moins de 3", regardez les moteurs de taille 1303-1404. Adaptez le moteur à la fois à la taille du cadre et à votre style de vol - la course a besoin d'un KV plus élevé, le freestyle bénéficie d'un KV moyen, et les constructions longue portée/cinématiques fonctionnent mieux avec des moteurs à faible KV.
Que signifie réellement le KV du moteur ?
Le KV (Kilo-Vélocité) représente le nombre théorique de TPM (tours par minute) qu'un moteur effectuera par volt appliqué sans charge. Un moteur de 2400KV alimenté par une batterie 4S à 16,8V (complètement chargée) tournerait théoriquement à 40 320 TPM sans hélice. En pratique, le nombre réel de TPM sera inférieur en raison de la charge de l'hélice et d'autres inefficacités. Un KV plus élevé signifie une rotation plus rapide mais moins de couple, tandis qu'un KV plus faible fournit plus de couple mais une rotation maximale plus lente.
Quelle est l'importance des roulements du moteur ?
Extrêmement importante - les roulements sont généralement le premier composant à tomber en panne dans un moteur. Des roulements de qualité assurent un fonctionnement plus fluide, une meilleure efficacité et une durée de vie beaucoup plus longue. Si vos moteurs développent un bruit de broyage ou semblent rugueux lorsque vous faites tourner la cloche à la main, les roulements sont probablement en train de s'user. Pour les pilotes sérieux, le passage à des roulements japonais ou européens peut améliorer considérablement la longévité du moteur.
Puis-je mélanger différents moteurs sur le même drone ?
Bien que ce soit techniquement possible, ce n'est pas recommandé. Des moteurs différents, même de même taille et de même KV, peuvent avoir des caractéristiques de performance légèrement différentes. Cela peut créer des déséquilibres de maniabilité et rendre le réglage difficile. Si vous devez remplacer un seul moteur endommagé, essayez d'obtenir exactement le même modèle du même lot de production si possible.
Comment savoir si mes moteurs sont de la bonne taille pour ma construction ?
Après un vol, vérifiez la température du moteur. Ils doivent être chauds mais pas trop chauds au toucher (idéalement moins de 60°C). S'ils sont extrêmement chauds, vos moteurs peuvent être sous-dimensionnés pour votre construction ou vous utilisez des hélices trop agressives. Regardez également la position des gaz en vol stationnaire - idéalement, votre drone devrait planer à environ 30-40% des gaz. Si vous avez besoin de beaucoup plus de gaz pour planer, vos moteurs peuvent être sous-dimensionnés ou sous-performants.
Qu'est-ce qui est le plus important, la taille du moteur ou la valeur KV ?
Les deux sont importants mais servent des objectifs différents. La taille du moteur (dimensions du stator) détermine le potentiel de puissance et le couple, tandis que le KV détermine comment cette puissance est délivrée en termes de TPM par rapport au couple. Pour une tension de batterie donnée, un KV plus élevé signifie plus de TPM mais moins de couple, tandis qu'une taille de stator plus grande signifie une capacité de puissance globale plus importante. Adaptez les deux à vos besoins spécifiques - un quad freestyle peut utiliser des moteurs 2207 2300KV, tandis qu'une construction longue portée peut préférer des moteurs 2507 1700KV.
À quelle fréquence les moteurs doivent-ils être remplacés ?
Avec un entretien approprié, des moteurs de qualité peuvent durer des centaines de vols. Remplacez les moteurs lorsque :
- Les roulements deviennent bruyants ou rugueux même après l'entretien
- Les performances diminuent sensiblement
- Les enroulements sont endommagés
- L'arbre est plié au-delà de toute réparation
- La cloche est fissurée ou endommagée
- Les aimants se détachent ou sont endommagés
De nombreux problèmes peuvent être résolus par le remplacement des roulements, ce qui est beaucoup plus économique que le remplacement du moteur entier.
Les moteurs coûteux sont-ils vraiment plus performants que les options bon marché ?
Dans de nombreux cas, oui, mais avec des rendements décroissants. Le passage des moteurs bon marché (10 $) aux moteurs de milieu de gamme (20 $) apporte généralement des améliorations significatives en termes de performances, de cohérence et de fiabilité. Cependant, la différence entre les moteurs milieu de gamme et haut de gamme (30 $ et plus) est souvent plus subtile et peut n'être perceptible que par des pilotes expérimentés ou dans des scénarios de compétition. Pour la plupart des amateurs, les moteurs milieu de gamme de fabricants réputés offrent le meilleur rapport qualité-prix. J'ai constaté que le point idéal se situe généralement dans la fourchette de 18 à 25 dollars, où l'on obtient la plupart des avantages de performance sans le prix élevé.
Comment savoir si un moteur est endommagé après un crash ?
Après un crash, effectuez ces vérifications :
- Faites tourner la cloche à la main - elle doit tourner en douceur sans grincement ni accrochage
- Vérifiez l'absence de dommages physiques sur la cloche, l'arbre ou la base
- Recherchez les enroulements exposés ou les signes de dommages sur les fils
- Assurez-vous que l'arbre est droit en le faisant rouler sur une surface plane
- Vérifiez que tous les aimants sont bien en place et fixés
- Testez le moteur avec de très faibles entrées d'accélérateur avant de voler
Même si un moteur passe ces contrôles, surveillez-le de près pendant votre prochain vol. Des vibrations, une chaleur ou un bruit inhabituels peuvent indiquer des dommages cachés.
Quelle est la différence entre les versions "N" et "P" des moteurs ?
Certains fabricants proposent des versions normales ("N") et des versions puissantes ("P") du même moteur. Les versions "P" ont généralement des configurations d'enroulement plus agressives conçues pour une puissance maximale, souvent au détriment de l'efficacité. Elles sont destinées à la course et au freestyle extrême où la poussée maximale est privilégiée par rapport à l'autonomie de vol. Pour la plupart des pilotes, les versions standard "N" offrent un meilleur équilibre entre performance et efficacité.
Conclusion
Le choix des bons moteurs pour votre drone FPV est l'une des décisions les plus importantes dans le processus de construction. Le moteur parfait n'est pas nécessairement le plus puissant ou le plus cher - c'est celui qui correspond le mieux à vos besoins spécifiques, à votre style de vol et au reste de vos composants.
Pour les débutants, je recommande de commencer avec des moteurs milieu de gamme dans des tailles standard (2306 ou 2207 avec 1800-2300KV pour les quads freestyle 5") de fabricants réputés. Au fur et à mesure que vous développerez vos compétences et vos préférences, vous pourrez expérimenter des options plus spécialisées adaptées à votre style de vol en évolution.
N'oubliez pas que les performances du moteur ne sont qu'une partie d'un système complexe. Les meilleurs moteurs ne fonctionneront pas bien avec des hélices inadaptées, des ESC inadéquats ou un mauvais réglage. Adoptez une approche holistique de votre construction, en veillant à ce que tous les composants fonctionnent harmonieusement ensemble.
Le paysage des moteurs FPV continue d'évoluer rapidement, les fabricants repoussant constamment les limites du possible en termes de puissance, d'efficacité et de fiabilité. En comprenant les principes et les spécifications fondamentaux couverts dans ce guide, vous serez bien équipé pour naviguer dans ces changements et prendre des décisions éclairées pour vos constructions.
Que vous construisiez votre premier drone ou votre cinquantième, j'espère que ce guide vous aidera à trouver les moteurs parfaits pour réaliser vos rêves de vol. Bon vol !
Références et lectures complémentaires
- ESC de drone : Principes et fonctionnement
- Contrôleurs de vol de drone : Principes et fonctionnement
- Aperçu des types et de la chimie des batteries de drone
- Amortissement des vibrations de drone
Ressources externes
- Miniquad Test Bench - Données complètes de test moteur
- Chaîne YouTube de Joshua Bardwell - Explications détaillées et tutoriels sur les moteurs
- Calculateur de moteur eCalc - Outil pour estimer les performances du moteur avec différentes hélices et batteries


