Motores de Drones: Selección, Rendimiento y Optimización
Los motores son el corazón palpitante de cualquier dron FPV, influyendo directamente en todo, desde el tiempo de vuelo y la agilidad hasta la velocidad máxima y las características de manejo. Después de construir cientos de drones y probar innumerables combinaciones de motores a lo largo de los años, he aprendido que la selección de motores es tanto un arte como una ciencia, que puede hacer o deshacer tu experiencia de vuelo. Esta guía completa te llevará a través de todo lo que necesitas saber sobre los motores de drones FPV, desde los principios básicos hasta las técnicas avanzadas de optimización.
Introducción a los motores de drones FPV
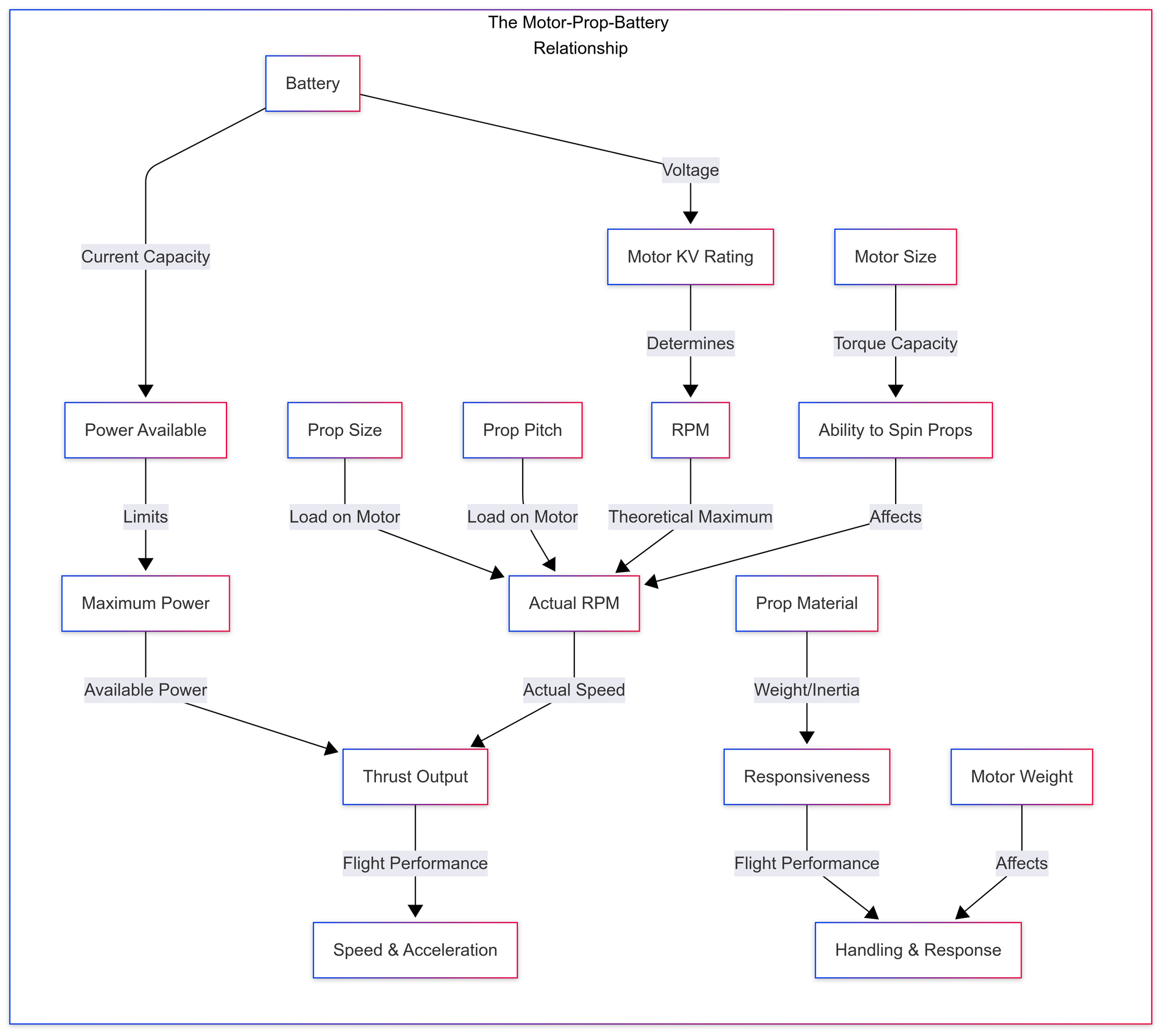
Los drones FPV (First Person View) dependen de motores eléctricos sin escobillas para generar el empuje necesario para el vuelo. Estos motores convierten la energía eléctrica de tu batería en rotación mecánica, que impulsa tus hélices para crear sustentación y maniobrabilidad.
Los motores que elijas definirán fundamentalmente el carácter de tu dron:
- Potencia y empuje determinan tu aceleración y velocidad máxima
- Peso afecta la agilidad y el tiempo de vuelo
- Tasa de respuesta influye en la precisión y el control del manejo
- Eficiencia impacta la duración de la batería y el tiempo de vuelo
- Durabilidad determina qué tan bien sobreviven a choques y aterrizajes duros
Ya sea que estés construyendo tu primer dron u optimizando tu décimo equipo de carreras, comprender la tecnología de los motores es esencial para crear una configuración que coincida con tus objetivos de vuelo.
Historia y evolución de los motores de drones
El desarrollo de motores para drones representa un fascinante viaje de innovación tecnológica que ha permitido el hobby moderno de FPV tal como lo conocemos hoy.
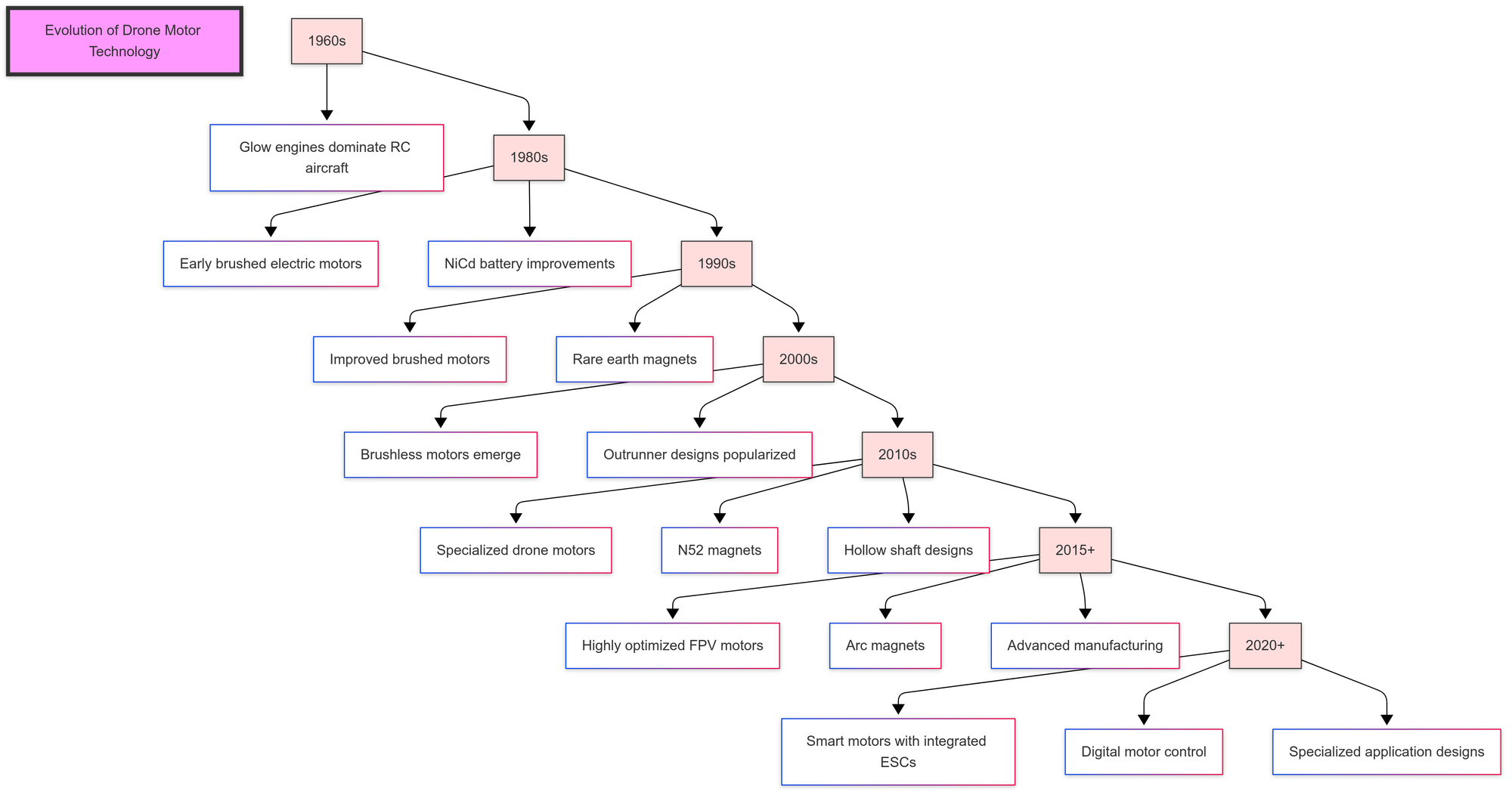
Primeros motores RC (1960s-1990s)
Las primeras aeronaves de radiocontrol usaban motores de combustión (motores de combustión interna en miniatura) o motores eléctricos con escobillas:
- 1960s-1970s: Los motores de combustión dominaban las aeronaves RC, con opciones eléctricas limitadas
- 1980s: Los primeros motores con escobillas se volvieron más viables con las mejoras de las baterías de NiCd
- 1990s: Motores con escobillas de mayor calidad con imanes de tierras raras mejoraron el rendimiento
Estos primeros sistemas eléctricos eran pesados, ineficientes y limitados en potencia, lo que dificultaba el vuelo acrobático real.
Revolución sin escobillas (2000s)
Los primeros años 2000 vieron el surgimiento de motores sin escobillas para aplicaciones de RC:
- 2000-2005: Primeros motores sin escobillas y ESC comercialmente viables
- 2005-2010: Los diseños outrunner (donde la campana gira alrededor del estator) se hicieron populares por su mayor torque
- 2007-2010: Los helicópteros RC impulsaron la innovación en el diseño y control de motores
Estos primeros motores sin escobillas estaban diseñados principalmente para aviones de ala fija y helicópteros, no para los drones multirrotor que conocemos hoy.
La era multirrotor (2010-2015)
La explosión de drones multirrotor creó demanda de motores especializados:
- 2010-2012: Primera generación de motores dedicados a multirrotores (diseños grandes y pesados)
- 2012-2013: Introducción del formato de tamaño común "22XX"
- 2013-2014: Las técnicas de fabricación mejoradas redujeron el peso
- 2014-2015: Los imanes N52 se convirtieron en estándar, mejorando significativamente la densidad de potencia
He visto algunos motores de "alto rendimiento" de esta época; se consideraban potentes en ese momento, pero serían ridículamente pesados y de baja potencia según los estándares actuales.
Desarrollo moderno de motores FPV (2015-presente)
Los últimos años han visto un rápido avance en la tecnología de motores específicamente para aplicaciones FPV:
- 2015-2017: Motores de carreras especializados con diseños ligeros
- 2017-2018: Introducción de ejes de titanio y diseños avanzados de campana
- 2018-2019: Imanes de arco y huecos de aire optimizados para eficiencia
- 2019-2020: Diseños ultraligeros con durabilidad mejorada
- 2020-presente: Motores inteligentes con ESC integrados y sistemas de control digital
La tasa de innovación ha sido notable: los motores se han vuelto simultáneamente más livianos, potentes, eficientes y duraderos en un período relativamente corto.
Fundamentos de los motores sin escobillas
Motores sin escobillas vs. con escobillas
Las primeras aeronaves RC usaban motores con escobillas, que tienen escobillas físicas que hacen contacto con un conmutador para crear rotación. Aunque son simples y económicos, estos motores sufren de:
- Menor eficiencia
- Vida útil reducida debido al desgaste de las escobillas
- Densidad de potencia limitada
- Mayores requisitos de mantenimiento
Los drones FPV modernos usan motores DC sin escobillas (BLDC), que eliminan las escobillas físicas a favor de la conmutación electrónica. Este avance trae:
- Mayor eficiencia (80-90% vs. 50-60% para los motores con escobillas)
- Mayor vida útil (sin escobillas que se desgasten)
- Mejor relación potencia-peso
- Mejor disipación de calor
- Menores requisitos de mantenimiento
Componentes del motor sin escobillas
Comprender los componentes físicos de un motor sin escobillas ayuda a evaluar la calidad y la idoneidad para diferentes aplicaciones:
- Campana (Rotor): La parte exterior giratoria que sostiene los imanes y se une a la hélice.
- Estator: El núcleo interior estacionario con bobinados de cobre. El tamaño del estator es una especificación clave (más sobre esto más adelante).
- Imanes: Típicamente hechos de aleaciones de neodimio (N52, N54, etc.), estos crean el campo magnético que interactúa con los bobinados del estator.
- Bobinados: Alambre de cobre enrollado alrededor de los polos del estator en patrones específicos (configuración Delta o Estrella).
- Rodamientos: Soportan la campana giratoria y reducen la fricción. Los rodamientos de calidad son cruciales para la longevidad y el rendimiento.
- Eje del Motor: Conecta la campana a los rodamientos y se extiende para montar la hélice.
- Base/Soporte: La parte inferior con orificios de montaje para fijar el motor al marco del dron.
Cómo Funcionan los Motores sin Escobillas
Los motores sin escobillas operan bajo principios electromagnéticos:
- El ESC (Controlador Electrónico de Velocidad) envía pulsos eléctricos precisamente sincronizados a los bobinados del motor
- Estos pulsos crean campos electromagnéticos en el estator
- Los campos electromagnéticos interactúan con los imanes permanentes en la campana
- Esta interacción crea fuerza rotacional (torque)
- El ESC ajusta continuamente el tiempo y la fuerza de estos pulsos para controlar la velocidad y dirección
Esta conmutación electrónica es lo que hace que los motores sin escobillas sean tan eficientes y receptivos. Cuando estoy atravesando una pista técnica ajustada, puedo sentir la respuesta inmediata de una combinación de motor/ESC de calidad: prácticamente no hay retraso entre la entrada del stick y la reacción del motor.
Entendiendo las Especificaciones del Motor
Descifrar las especificaciones del motor es esencial para tomar decisiones informadas. Desglosemos los parámetros clave:
Designación del Tamaño del Motor
Los motores FPV generalmente se etiquetan con un número de cuatro dígitos, como 2207 o 2306. Esta notación te indica las dimensiones físicas del estator:
- Primeros dos dígitos: Ancho del estator (diámetro) en mm
- Últimos dos dígitos: Altura del estator en mm
Por ejemplo, un motor 2207 tiene un estator que mide 22mm de ancho y 7mm de alto.
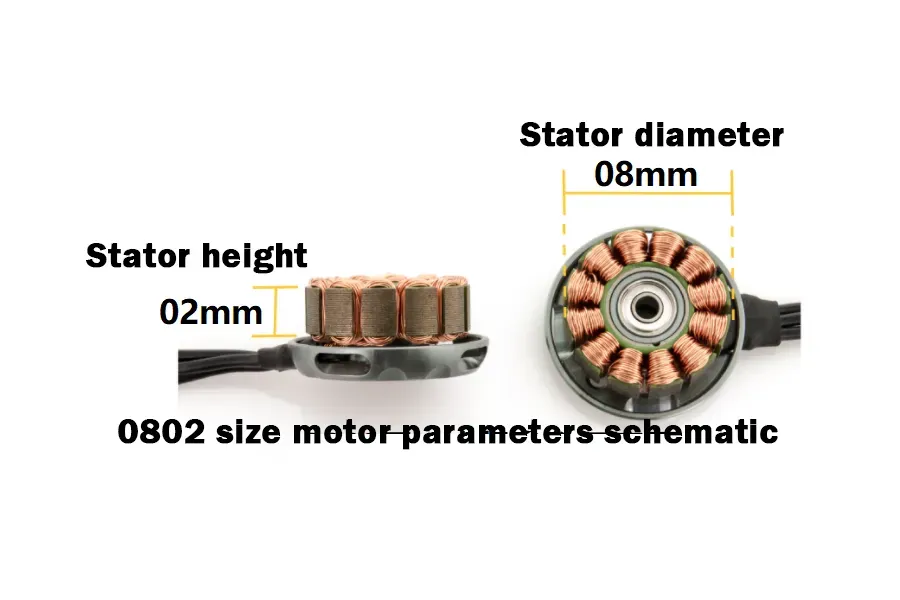

En general:
- Mayor ancho del estator = más torque
- Mayor altura del estator = más potencia y rendimiento máximo\
En mi experiencia, la diferencia entre un ancho de estator de 22mm y 23mm puede parecer pequeña en papel, pero puede transformar completamente cómo se siente un dron en vuelo. Mi construcción freestyle 2207 tiene una respuesta notablemente más rápida que mi configuración 2306 idéntica, que se siente más suave y lineal en la entrega de potencia.
Clasificación KV
KV (Kilo-Velocidad) representa las RPM (revoluciones por minuto) teóricas que girará el motor por voltio aplicado sin carga:
- Un motor 2400KV en una batería 4S (16.8V completamente cargada) teóricamente giraría a 40,320 RPM (2400 × 16.8) sin una hélice
En la práctica, las RPM reales serán más bajas debido a la carga e ineficiencias. La clasificación KV tiene implicaciones significativas:
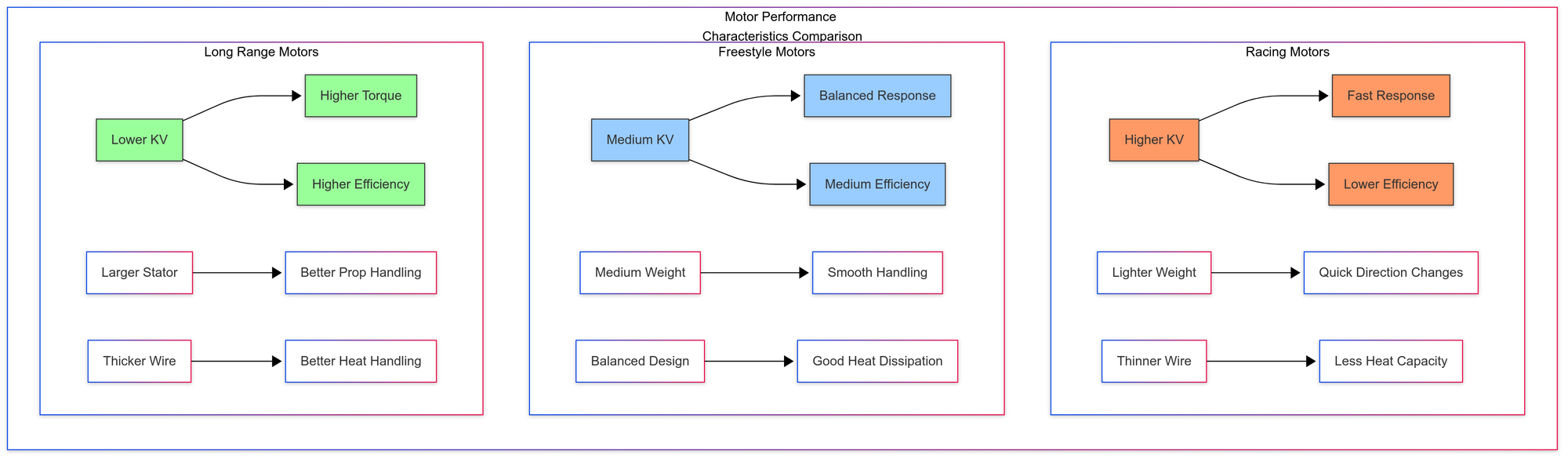
- KV más alto (2400KV+): Más velocidad máxima, respuesta más rápida, más adecuado para carreras y hélices más pequeñas
- KV medio (1700-2300KV): Rendimiento equilibrado, bueno para freestyle y vuelo general
- KV más bajo (1300-1600KV): Más torque, mejor eficiencia, adecuado para hélices más grandes y vuelo de largo alcance
Un error que cometí al principio de mi viaje FPV fue elegir siempre los motores de KV más alto disponibles, pensando que "más rápido es mejor". Rápidamente aprendí que los motores de KV ultra alto en un quad freestyle lo hacían nervioso y difícil de volar suavemente, sin mencionar el tiempo de vuelo drásticamente reducido.
Impacto del Tamaño del Estator
El tamaño del estator afecta directamente el rendimiento del motor:
| Tamaño del Estator | Caso de Uso Típico | Características |
|---|---|---|
| 1105-1306 | Micro quads (2-3") | Ligero, baja potencia, eficiente |
| 1407-1506 | Mini quads (3-4") | Buen equilibrio de peso y potencia |
| 2004-2206 | Quads de tamaño medio (4-5") | Receptivo, bueno para vuelo técnico |
| 2207-2306 | Quads estándar de 5" | Potentes todoterreno |
| 2407-2507 | Freestyle pesado/cinemático | Máxima potencia, maneja cargas pesadas |
| 2807-2912 | Largo alcance de 7"+ | Alto torque para hélices grandes |
Los estatores más grandes pueden producir más potencia pero agregan peso. El punto óptimo depende del tamaño de tu marco, batería y estilo de vuelo.
Fuerza y Tipos de Imanes
Los imanes se clasifican por su fuerza, con números más altos que indican una mayor fuerza magnética:
- N48: Fuerza estándar
- N52: Fuerte, común en motores de gama media
- N54/N55: Muy fuerte, se encuentra en motores premium
Los imanes más fuertes proporcionan más torque y capacidad de respuesta, pero pueden reducir la eficiencia y aumentar la temperatura del motor. Algunos fabricantes utilizan imanes de arco (curvados para coincidir con la circunferencia de la campana) en lugar de los imanes rectos tradicionales, afirmando que mejoran la eficiencia.
Después de quemar varios motores con imanes más débiles que se desmagnetizaron después de choques fuertes, he descubierto que invertir en motores con imanes N52 o mejores vale la pena en términos de longevidad, especialmente para el vuelo estilo libre donde los impactos son inevitables.
Configuraciones de Bobinado
Los bobinados del motor se pueden disponer en diferentes patrones:
- Delta: Tres conexiones, generalmente más potente a altas RPM
- Wye (Estrella): Tres conexiones con una toma central, típicamente más eficiente a bajas RPM
La mayoría de los motores FPV utilizan bobinados Delta por sus características de rendimiento, pero algunos fabricantes experimentan con patrones de bobinado híbridos o modificados para objetivos de rendimiento específicos.
Consideraciones de Peso
El peso del motor es un factor crítico que afecta:
- Características de vuelo: Motores más ligeros significan un manejo más ágil
- Peso total: Impacta el tiempo de vuelo y el rendimiento
- Masa rotacional: Afecta la capacidad de respuesta a los cambios de aceleración
Los motores modernos han tendido a ser más ligeros mientras mantienen la potencia, con opciones premium que utilizan ejes de titanio y campanas de aleación de aluminio/magnesio para reducir el peso sin sacrificar la resistencia.
Capacidades de Manejo de Potencia
La capacidad de un motor para manejar la potencia se mide típicamente en vatios y está determinada por:
- Masa de cobre en los bobinados
- Capacidad de disipación de calor
- Calidad de construcción
Los fabricantes a menudo proporcionan especificaciones como "potencia continua máxima" y "potencia de ráfaga", aunque estas deben tomarse como pautas en lugar de límites absolutos.
He aprendido a ser escéptico de las afirmaciones de potencia después de ver un motor supuestamente "capaz de 1200W" derretirse después de solo 30 segundos a unos 800W durante una prueba de banco. Los motores de calidad de fabricantes de renombre tienden a ser más conservadores en sus clasificaciones.
Guía de Selección de Motores
Elegir los motores adecuados implica hacer coincidir sus características con su construcción específica y objetivos de vuelo.
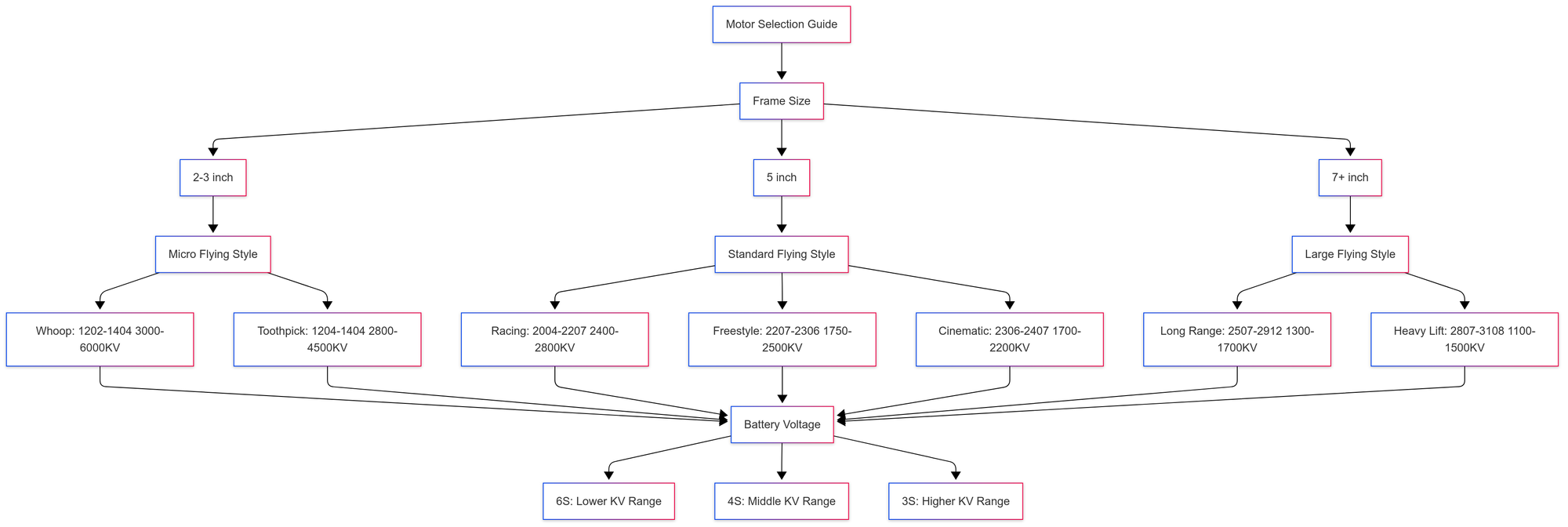
Haciendo Coincidir los Motores con el Tamaño del Marco
El tamaño del marco dicta en gran medida las opciones de motor apropiadas:
| Tamaño del Marco | Tamaños de Motor Recomendados | Rango KV Típico |
|---|---|---|
| 2-3" Micro | 1105-1306 | 3000-6000KV |
| 3" Toothpick | 1204-1404 | 2800-4500KV |
| 3.5" Cinewhoop | 1404-1506 | 2600-3600KV |
| 4" Ligero | 1606-2004 | 2400-3200KV |
| 5" Freestyle | 2205-2306 | 1750-2500KV |
| 5" Carreras | 2004-2207 | 2400-2800KV |
| 6" Freestyle | 2306-2407 | 1600-2000KV |
| 7"+ Largo Alcance | 2507-2912 | 1300-1700KV |
Estos son puntos de partida; sus requisitos específicos pueden requerir variaciones de estas recomendaciones.
Consideraciones para Diferentes Estilos de Vuelo
Diferentes estilos de vuelo demandan diferentes características del motor:
Carreras
- Prioridad: Velocidad, aceleración, capacidad de respuesta
- Recomendado: Menor peso, mayor KV (2400-2800KV para 5")
- Tamaño del estator: A menudo diámetro ligeramente más pequeño pero más alto (por ejemplo, 2207)
- Notas: Los motores de carreras priorizan el rendimiento a ráfagas sobre la durabilidad y la eficiencia
He descubierto que las construcciones dedicadas a las carreras se benefician de motores con un peso e inercia ligeramente más bajos, incluso a expensas de algo de potencia. La capacidad de cambiar de dirección rápidamente a menudo importa más que el empuje absoluto en pistas técnicas.
Freestyle
- Prioridad: Entrega de potencia suave, durabilidad, buena resolución del acelerador
- Recomendado: KV medio (1800-2300KV para 5")
- Tamaño del estator: Equilibrado (por ejemplo, 2306, 2207)
- Notas: Necesita manejar vuelos variados, desde crucero suave hasta maniobras agresivas
Para freestyle, prefiero motores con un poco más de masa de estator que proporcionan una respuesta más suave del acelerador y un mejor manejo tanto en movimientos lentos y precisos como en trucos de alta potencia.
Cinematográfico/Largo Alcance
- Prioridad: Eficiencia, funcionamiento suave, fiabilidad
- Recomendado: KV más bajo (1300-1800KV para 5-7")
- Tamaño del estator: A menudo más grande para torque con hélices grandes (por ejemplo, 2407, 2507)
- Notas: Debe equilibrar las necesidades de potencia con la eficiencia para tiempos de vuelo prolongados
En mis construcciones de largo alcance, he descubierto que los motores ligeramente sobredimensionados que funcionan a porcentajes de aceleración más bajos proporcionan una mejor eficiencia que los motores más pequeños que funcionan a una aceleración más alta. Este enfoque contraintuitivo ha agregado minutos a mis tiempos de vuelo.
Construcciones Micro
- Prioridad: Ahorro de peso, potencia adecuada
- Recomendado: KV más alto (3000-6000KV según el tamaño)
- Tamaño del estator: Lo más pequeño posible mientras se satisfacen las necesidades de potencia
- Notas: Cada gramo importa; incluso las pequeñas diferencias de peso son notables
Relaciones Potencia-Peso
Una métrica útil para evaluar la idoneidad del motor es la relación empuje-peso de la construcción completa:
- Carreras: Relación 12:1 a 15:1 (extremadamente receptivo, tiempos de vuelo más cortos)
- Freestyle: Relación 8:1 a 12:1 (buen equilibrio de capacidad de respuesta y tiempo de vuelo)
- Cinematográfico: Relación 5:1 a 8:1 (vuelo más suave, tiempos de vuelo más largos)
- Largo Alcance: Relación 3:1 a 5:1 (máxima eficiencia, vuelo estable)
Estas relaciones representan el empuje total disponible dividido por el peso total del dron.
Principios de Coincidencia de Motores y Hélices
Los motores y las hélices deben combinarse cuidadosamente:
- Las hélices más grandes requieren motores con más torque (diámetro de estator más grande)
- Las hélices de mayor paso ponen más carga en los motores y pueden requerir un KV más bajo
- Las hélices más pesadas aumentan la temperatura del motor y reducen la capacidad de respuesta
Una guía general para quads de 5":
- Hélices 5x4x3 (5", 4" de paso, 3 palas): Funcionan bien con motores de 2300-2600KV
- Hélices 5x5x3: Mejor combinadas con motores de 1900-2300KV
- Hélices 5x4.5x2: Pueden usar KV más alto (2400-2800KV) para carreras
Una vez intenté usar hélices agresivas 5x4.3x3 en motores de alto KV (2750KV) con 6S, y aunque el empuje era increíble, los motores se calentaron tanto que podía olerlos después de un vuelo de 2 minutos. La combinación adecuada es crucial para la longevidad.
Consideraciones sobre el voltaje de la batería
El KV del motor debe coincidir con el voltaje de tu batería:
| Batería | Rango de KV para 5" | Notas |
|---|---|---|
| 3S (12.6V) | 2600-3000KV | Menos común ahora, pero aún se usa para algunas construcciones de carreras |
| 4S (16.8V) | 2300-2600KV | Buen equilibrio, popular para estilo libre |
| 5S (21.0V) | 1900-2300KV | Creciendo en popularidad, buen equilibrio de potencia/eficiencia |
| 6S (25.2V) | 1700-2000KV | Máxima potencia, popular para estilo libre y cinematográfico |
Los sistemas de mayor voltaje (6S) con motores apropiados de menor KV generalmente proporcionan:
- Mejor eficiencia
- Potencia más consistente durante la descarga de la batería
- Menor consumo de corriente para la misma potencia de salida
- Menos caída de voltaje bajo carga
Métricas de rendimiento del motor
Comprender cómo funcionan los motores requiere mirar más allá de las especificaciones a los datos de rendimiento reales.
Explicación de las pruebas de empuje
Las pruebas de empuje miden la fuerza real producida por una combinación de motor/hélice en varios niveles de aceleración:
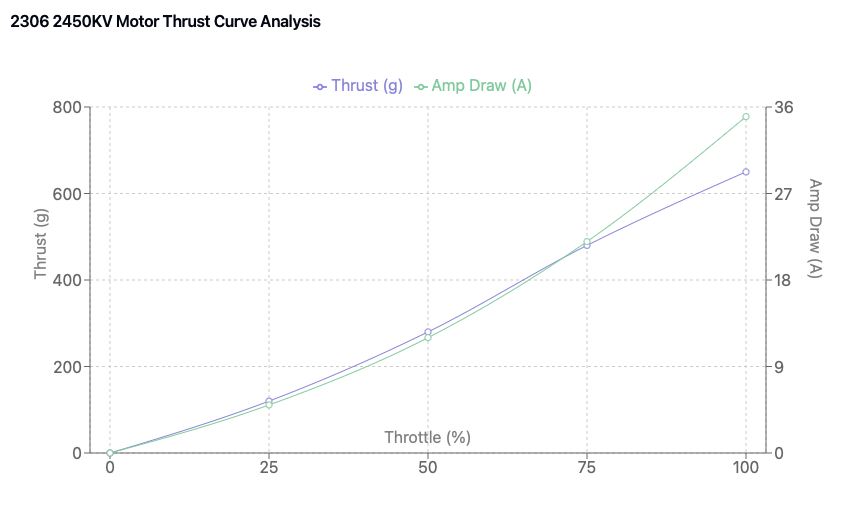
Las métricas clave de las pruebas de empuje incluyen:
- Empuje máximo: Fuerza máxima producida al 100% de aceleración
- Curva de empuje: Qué tan linealmente aumenta el empuje con la entrada de aceleración
- Eficiencia: Empuje producido por vatio de potencia consumida
- Consumo de amperios: Consumo de corriente en diferentes niveles de aceleración
He construido mi propio equipo de pruebas de empuje, y los resultados a menudo contradicen las afirmaciones del fabricante. Algunos motores anunciados como de "alto empuje" en realidad producen menos fuerza que opciones más modestas pero funcionan significativamente más calientes.
Interpretación de gráficos de datos de empuje
Al examinar los datos de pruebas de empuje:
- Mira más allá del empuje máximo - Un motor que produce un poco menos de empuje máximo pero tiene una curva de empuje más lineal a menudo proporciona un mejor manejo.
- Considera el empuje en las posiciones típicas de aceleración - La mayoría de los vuelos ocurren entre el 20-60% de aceleración, por lo que el rendimiento en este rango importa más que el empuje máximo.
- Compara la eficiencia - Dos motores pueden producir un empuje similar, pero si uno consume significativamente menos corriente, proporcionará tiempos de vuelo más largos.
- Verifica el aumento de temperatura - El calor excesivo indica ineficiencia y posibles problemas de longevidad.
Consideraciones de eficiencia
La eficiencia del motor (empuje por vatio) varía en todo el rango de aceleración:
- La mayoría de los motores son más eficientes al 30-60% de aceleración
- La eficiencia cae significativamente a aceleraciones muy bajas y muy altas
- Los estatores más grandes tienden a ser más eficientes con hélices más grandes
- Los motores de mayor KV típicamente sacrifican algo de eficiencia por capacidad de respuesta
Para construcciones de largo alcance, priorizo los motores que mantienen una buena eficiencia en el rango de aceleración del 30-50%, ya que es donde el dron pasará la mayor parte de su tiempo de vuelo.
Gestión de temperatura
La temperatura del motor es un indicador crítico de la combinación y configuración adecuadas:
- Temperatura normal de funcionamiento: Cálido al tacto pero no incómodo de sostener (40-60°C)
- Rango de precaución: Demasiado caliente para tocar cómodamente (60-80°C)
- Zona de peligro: Demasiado caliente para tocar en absoluto (80°C+)
Factores que afectan la temperatura del motor:
- Clasificación KV (mayor KV = más calor)
- Tamaño y paso de la hélice (más agresivo = más calor)
- Estilo de vuelo (maniobras agresivas = más calor)
- Temperatura ambiente
- Flujo de aire de refrigeración
He desarrollado el hábito de tocar mis motores después de cada vuelo; es una verificación simple que me ha salvado de dañar muchos motores al alertarme sobre posibles problemas antes de una falla.
Características de ruido
El ruido del motor puede indicar características de rendimiento:
- Sonido suave y de tono más bajo: Generalmente indica un funcionamiento eficiente
- Zumbido agudo: Puede indicar RPM muy altas, potencialmente empujando los límites
- Sonido de trituración o desigual: Podría indicar problemas de rodamientos o desequilibrio
- Resonancia en ciertas posiciones del acelerador: Puede indicar problemas de vibración
Más allá de ser molesto, el ruido excesivo a menudo se correlaciona con la ineficiencia y puede señalar problemas potenciales.
Conceptos Avanzados de Motores
Para aquellos que buscan optimizar aún más el rendimiento, estos conceptos avanzados pueden ayudar a ajustar la selección y configuración del motor.
Optimización del Espacio de Aire
El espacio de aire es la distancia entre el estator y los imanes:
- Espacio más pequeño: Más potente, más receptivo, pero potencialmente menos eficiente
- Espacio más grande: Más eficiente, funciona más fresco, pero menos potente
Los motores premium a menudo cuentan con espacios de aire precisamente optimizados que equilibran el rendimiento y la eficiencia.
Tipos y Calidad de Rodamientos
Los rodamientos son componentes críticos que afectan el rendimiento y la longevidad:
- Rodamientos estándar: Adecuados para vuelo casual
- Rodamientos sellados: Mejor protección contra el polvo y la humedad
- Rodamientos de cerámica: Fricción reducida, mayor vida útil, mayor costo
- Rodamientos híbridos: Bolas de cerámica con pistas de acero, buen equilibrio de rendimiento y costo
He descubierto que actualizar a rodamientos japoneses de calidad (incluso los de acero estándar) hace una diferencia notable en la suavidad y longevidad del motor en comparación con los rodamientos chinos genéricos que se encuentran en los motores económicos.
Diseño y Materiales de la Campana
El diseño de la campana afecta el peso, la refrigeración y la durabilidad:
- Campanas estándar: Generalmente de aluminio, buen equilibrio de peso y resistencia
- Campanas ligeras: Material más delgado o recortes para reducir el peso
- Diseños de refrigeración: Recortes o aletas adicionales para mejorar el flujo de aire
- Variaciones de material: Algunos motores premium usan componentes de titanio, aleaciones de magnesio o fibra de carbono
Diseños de Flujo Unilateral vs. Bilateral
Los diseños de motores varían en patrones de flujo magnético:
- Flujo unilateral: Imanes solo en el borde exterior de la campana, más ligero pero menos potente
- Flujo bilateral: Imanes tanto en la parte superior como en los lados de la campana, más potente pero más pesado
Los diseños bilaterales se están volviendo más comunes en motores premium por sus ventajas de rendimiento, particularmente en tamaños más grandes.
Diseños de Eje Hueco vs. Sólido
Los ejes de motor vienen en dos diseños principales:
- Eje sólido: Diseño tradicional, máxima resistencia
- Eje hueco: Peso más ligero, resistencia adecuada para la mayoría de las aplicaciones, mejor refrigeración
Para carreras y estilo libre, he encontrado que los diseños de eje hueco proporcionan una mejora notable en la capacidad de respuesta debido a la masa rotacional reducida.
Imanes de Arco vs. Imanes Rectos
La forma del imán afecta las características de rendimiento:
- Imanes rectos: Diseño tradicional, más fácil de fabricar
- Imanes de arco: Curvados para coincidir con la circunferencia de la campana, potencialmente más eficientes
Algunos fabricantes afirman mejoras de eficiencia del 5-10% con imanes de arco, aunque los beneficios del mundo real varían.
Calibre del Cable y Técnicas de Bobinado
Las especificaciones de bobinado afectan el rendimiento:
- Calibre del cable: El cable más grueso (número de calibre más bajo) maneja más corriente pero caben menos vueltas en el estator
- Técnica de bobinado: Bobinado a mano vs. bobinado a máquina afecta la consistencia y el rendimiento
- Factor de llenado: Qué tan eficientemente se utiliza el espacio en el estator por el cobre
Los motores premium a menudo anuncian "bobinados de alta densidad" con mejores factores de llenado, lo que resulta en más masa de cobre y mejor rendimiento.
Instalación y Configuración
La instalación adecuada es crucial para el rendimiento óptimo del motor y la longevidad.
Técnicas de Montaje Adecuadas
Al montar motores:
- Use tornillos apropiados - Demasiado largos pueden hacer contacto con los bobinados, demasiado cortos no se asegurarán correctamente
- Aplique fijador de roscas - El fijador de roscas de resistencia media (azul) evita que se aflojen por vibración
- Verifique si hay atascamiento - Asegúrese de que la campana gire libremente después del montaje
- Verifique la alineación - Los motores deben estar perfectamente perpendiculares a los brazos

Aprendí la importancia del montaje adecuado por las malas después de perder un motor en pleno vuelo debido a tornillos aflojados por la vibración. Ahora reviso el montaje del motor antes de cada sesión de vuelo.
Gestión de Cables
El enrutamiento adecuado de los cables evita daños e interferencias:
- Recorte a la longitud apropiada - El exceso de cable agrega peso y puede engancharse en obstáculos
- Aleje de las hélices - Incluso con protectores de hélice, los cables pueden cortarse
- Asegure al marco - Evite la vibración y el movimiento
- Considere la ubicación del ESC - Los cables de motor más cortos reducen la resistencia y el peso

Dirección del Motor y Orientación de la Hélice
Los cuadricópteros FPV generalmente usan una configuración de "hélices hacia adentro" o "hélices hacia afuera":
- Hélices hacia adentro: Las hélices giran hacia adentro en la parte delantera del quad
- Mejor manejo en vuelo hacia adelante
- Más eficiente en vuelo hacia adelante
- Estándar para carreras
- Hélices hacia afuera: Las hélices giran hacia afuera en la parte delantera
- Mejor autoridad de guiñada
- Efecto de lavado de hélice reducido
- Popular para estilo libre
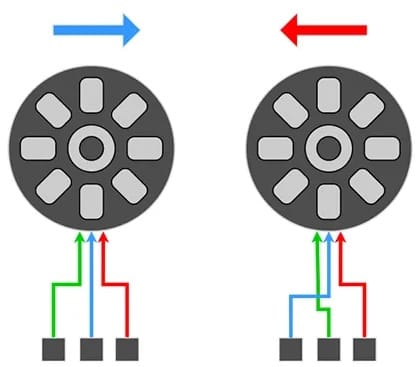
La dirección del motor se establece en el software del controlador de vuelo y por el orden de conexión de los cables al ESC.
Consideraciones de coincidencia de ESC
Los motores y los ESC deben coincidir para un rendimiento óptimo:
- Clasificación de corriente: Los ESC deben estar clasificados para al menos el consumo máximo de corriente del motor
- Velocidad de respuesta: Los ESC de mayor calidad proporcionan un control del motor más rápido y preciso
- Soporte de protocolo: Los ESC modernos deben admitir DShot600 o superior para obtener el mejor rendimiento
- Capacidad de telemetría: Los ESC con telemetría proporcionan datos valiosos sobre el rendimiento del motor
Mejores prácticas de soldadura
Una buena soldadura es esencial para una entrega de energía confiable:
- Use calor adecuado - 350-380°C para soldadores estándar
- Pre-estañe los cables y las almohadillas - Facilita la conexión final
- Use soldadura de calidad - La soldadura con plomo 60/40 o 63/37 funciona mejor para las conexiones del motor
- Mantenga las uniones limpias - Evite el exceso de soldadura que podría causar cortocircuitos
- Use el calibre de cable apropiado - 20AWG es estándar para motores de quad de 5", 18AWG para construcciones más grandes
La mala soldadura es una de las causas más comunes de problemas de rendimiento y fallas que he visto. Una vez pasé horas solucionando problemas de comportamiento errático que resultó ser una sola unión de soldadura fría en un cable del motor.
Mantenimiento y solución de problemas
El mantenimiento adecuado prolonga la vida útil del motor y previene fallas.
Mantenimiento de rodamientos
Los rodamientos suelen ser el primer componente en fallar:
- Limpieza regular - Elimine el polvo y los escombros después de volar en condiciones sucias
- Lubricación adecuada - Una pequeña gota de aceite ligero puede prolongar la vida útil de los rodamientos
- Evite la exposición al agua - Seque completamente si los motores se mojan
- Escuche los cambios - El aumento del ruido a menudo indica desgaste de los rodamientos
He revivido innumerables motores "muertos" simplemente reemplazando los rodamientos, una habilidad que vale la pena aprender si te tomas en serio el hobby.
Identificación de motores dañados
Los signos comunes de daño del motor incluyen:
- Daño físico: Ejes doblados, campanas agrietadas o bobinados dañados
- Problemas eléctricos: Cortocircuitos entre fases o a tierra
- Problemas de rendimiento: Potencia reducida, calor excesivo o vibración
- Sonidos inusuales: Ruido de molienda, clic o inconsistente
Puntos de falla comunes
Comprender los modos de falla típicos ayuda con la prevención:
- Rodamientos - Por lo general, el primer componente en fallar
- Bobinados - Pueden dañarse por sobrecalentamiento o impacto físico
- Imanes - Pueden agrietarse, desplazarse o desmagnetizarse por impactos o calor excesivo
- Eje - Puede doblarse por choques o aterrizajes bruscos
- Campana - Puede agrietarse o desequilibrarse por impactos
Eliminación de escombros y limpieza
El mantenimiento regular previene problemas:
- Elimine los escombros visibles - Verifique si hay cabello, cuerda o material vegetal envuelto alrededor de la campana
- Limpieza con aire comprimido - Elimine el polvo y las partículas pequeñas
- Verifique la contaminación - Busque aceite o suciedad en los bobinados
- Inspeccione la corrosión - Particularmente después de volar cerca de agua salada
Técnicas de enderezamiento del eje
Los ejes ligeramente doblados a veces se pueden salvar:
- Identifique la curva - Haga rodar el motor sobre una superficie plana para encontrar el punto alto
- Presión suave - Use una herramienta de motor o alicates con protección para aplicar una presión suave
- Pruebe con frecuencia - Verifique el progreso con frecuencia para evitar la sobrecorrección
- Sepa cuándo reemplazar - Algunas curvas son demasiado severas para arreglarlas de manera confiable
He enderezado con éxito muchos ejes de motor, pero es un proceso delicado: demasiada fuerza empeorará el problema.
Cuándo reparar vs. reemplazar
Pautas para la toma de decisiones:
- Reemplace si:
- Los bobinados están dañados
- Varios imanes están sueltos o dañados
- El eje está muy doblado
- La campana está agrietada o significativamente dañada
- Considere la reparación si:
- Solo los rodamientos están desgastados
- El eje está ligeramente doblado
- Un solo imán está suelto pero no dañado
- Los problemas de rendimiento son menores
Consejos profesionales y conocimientos de expertos
Después de años de construir, correr y reparar drones, he reunido algunos conocimientos que van más allá de las especificaciones.
Ajuste fino del rendimiento del motor
- Equilibre sus hélices - Incluso las hélices de fábrica se benefician del equilibrio
- Verifique y elimine las vibraciones - Reducen el rendimiento y causan desgaste prematuro
- Considere el tiempo del motor - Ajustar el tiempo del ESC puede ajustar la respuesta del motor
- Haga coincidir los motores con cuidado - Use motores del mismo lote para obtener mejores resultados
- Período de rodaje - Algunos motores funcionan mejor después de algunos vuelos para asentar los rodamientos
Modificaciones personalizadas
Para aquellos dispuestos a experimentar:
- Actualizaciones de rodamientos - Reemplazar los rodamientos de serie con opciones premium
- Modificaciones de campana personalizadas - Algunos pilotos perforan agujeros de enfriamiento estratégicos
- Actualizaciones del eje - Ejes de reemplazo de titanio para mayor durabilidad
- Equilibrio personalizado - Más allá del equilibrio de fábrica para un rendimiento máximo
- Modificaciones de bobinado - Los usuarios avanzados pueden rebobinar los motores para características específicas
Secretos de carreras
Los corredores competitivos a menudo:
- Inclinan los motores hacia abajo - Inclinar ligeramente los motores hacia atrás mejora la eficiencia del vuelo hacia adelante
- Usan campanas más ligeras - Sacrificando algo de durabilidad por capacidad de respuesta
- Hacen funcionar los motores al límite - Aceptando una vida útil más corta para un rendimiento máximo
- Hacen coincidir los motores con las pistas - Diferentes motores para pistas técnicas vs. de alta velocidad
- Ajuste de desincronización - Ajustando cuidadosamente los parámetros del ESC para evitar problemas de desincronización
Optimización de la longevidad
Para una vida útil máxima del motor:
- Manténgase por debajo del 80% del acelerador para la mayoría de los vuelos
- Permita tiempo de enfriamiento entre vuelos agresivos
- Verifique las temperaturas regularmente
- Inspeccione y limpie después de choques
- Almacene con cuidado - Evite la humedad y las temperaturas extremas
Tendencias futuras de la tecnología de motores
Mirando hacia el futuro, podemos esperar:
- Mayor integración - Sistemas combinados de motor/ESC/hélice
- Motores inteligentes con sensores integrados y telemetría
- Nuevos materiales para un peso más ligero y una mejor disipación de calor
- Mayor eficiencia a través de mejoras en diseño y materiales
- Diseños especializados para categorías emergentes de drones
Preguntas frecuentes: Preguntas comunes sobre motores de drones
¿Cómo sé qué tamaño de motores usar para mi dron?
Comience con el tamaño del marco y el uso previsto. Para un quad estilo libre estándar de 5", los motores 2207 o 2306 son excelentes para todo uso. Para carreras, considere motores ligeramente más pequeños 2205 o 2206. Para construcciones micro de menos de 3", mire los motores de tamaño 1303-1404. Haga coincidir el motor con el tamaño del marco y su estilo de vuelo: las carreras necesitan un KV más alto, el estilo libre se beneficia de un KV medio y las construcciones de largo alcance/cinematográficas funcionan mejor con motores de KV más bajo.
¿Qué significa realmente el KV del motor?
KV (Kilo-Velocidad) representa las RPM teóricas (revoluciones por minuto) que girará un motor por voltio aplicado sin carga. Un motor de 2400KV alimentado por una batería 4S a 16.8V (completamente cargada) teóricamente giraría a 40,320 RPM sin una hélice. En la práctica, las RPM reales serán más bajas debido a la carga de la hélice y otras ineficiencias. Un KV más alto significa una rotación más rápida pero menos torque, mientras que un KV más bajo proporciona más torque pero una rotación máxima más lenta.
¿Qué tan importantes son los rodamientos del motor?
Extremadamente importantes: los rodamientos suelen ser el primer componente que falla en un motor. Los rodamientos de calidad proporcionan un funcionamiento más suave, una mejor eficiencia y una vida útil mucho más larga. Si sus motores desarrollan un sonido de trituración o se sienten ásperos cuando gira la campana con la mano, es probable que los rodamientos se estén desgastando. Para los pilotos serios, la actualización a rodamientos japoneses o europeos puede mejorar significativamente la longevidad del motor.
¿Puedo mezclar diferentes motores en el mismo dron?
Si bien es técnicamente posible, no se recomienda. Diferentes motores, incluso del mismo tamaño y KV, pueden tener características de rendimiento ligeramente diferentes. Esto puede crear desequilibrios de manejo y dificultar la sintonización. Si debe reemplazar un solo motor dañado, intente obtener el mismo modelo exacto del mismo lote de producción si es posible.
¿Cómo sé si mis motores son del tamaño adecuado para mi construcción?
Después de un vuelo, verifique la temperatura del motor. Deben estar tibios pero no demasiado calientes al tacto (idealmente por debajo de 60°C). Si están extremadamente calientes, sus motores podrían ser demasiado pequeños para su construcción o está usando hélices demasiado agresivas. Además, observe la posición del acelerador de vuelo estacionario: idealmente, su dron debería flotar alrededor del 30-40% del acelerador. Si necesita significativamente más aceleración para flotar, sus motores podrían ser demasiado pequeños o tener un rendimiento inferior.
¿Qué es más importante, el tamaño del motor o la clasificación KV?
Ambos son importantes pero sirven para diferentes propósitos. El tamaño del motor (dimensiones del estator) determina el potencial de potencia y el torque, mientras que KV determina cómo se entrega esa potencia en términos de RPM vs. torque. Para un voltaje de batería dado, un KV más alto significa más RPM pero menos torque, mientras que un tamaño de estator más grande significa una mayor capacidad de potencia general. Combine ambos según sus requisitos específicos: un quad de estilo libre podría usar motores 2207 2300KV, mientras que una construcción de largo alcance podría preferir motores 2507 1700KV.
¿Con qué frecuencia deben reemplazarse los motores?
Con el cuidado adecuado, los motores de calidad pueden durar cientos de vuelos. Reemplace los motores cuando:
- Los rodamientos se vuelven ruidosos o ásperos incluso después del mantenimiento
- El rendimiento disminuye notablemente
- Los devanados están dañados
- El eje se dobla más allá de la reparación
- La campana está agrietada o dañada
- Los imanes se aflojan o dañan
Muchos problemas se pueden solucionar con reemplazos de rodamientos, lo cual es mucho más económico que reemplazar todo el motor.
¿Los motores caros realmente funcionan mejor que las opciones de presupuesto?
En muchos casos, sí, pero con rendimientos decrecientes. El salto de motores económicos ($10) a motores de gama media ($20) generalmente trae mejoras significativas en el rendimiento, la consistencia y la confiabilidad. Sin embargo, la diferencia entre los motores de gama media y premium ($30+) a menudo es más sutil y solo puede ser perceptible para los pilotos experimentados o en escenarios competitivos. Para la mayoría de los aficionados, los motores de gama media de fabricantes de renombre ofrecen la mejor propuesta de valor. He descubierto que el punto óptimo suele estar en el rango de $18-25, donde obtienes la mayoría de los beneficios de rendimiento sin el precio premium.
¿Cómo puedo saber si un motor está dañado después de un choque?
Después de un choque, realice estas verificaciones:
- Gire la campana a mano - debe girar suavemente sin rechinar ni atascarse
- Verifique si hay daños físicos en la campana, el eje o la base
- Busque devanados expuestos o signos de daño en los cables
- Asegúrese de que el eje esté recto rodándolo sobre una superficie plana
- Verifique que todos los imanes estén seguros y en su lugar
- Pruebe el motor con entradas de aceleración muy bajas antes de volar
Incluso si un motor pasa estas verificaciones, vigílelo de cerca durante su próximo vuelo. Las vibraciones inusuales, el calor o el ruido pueden indicar daños ocultos.
¿Cuál es la diferencia entre las versiones "N" y "P" de los motores?
Algunos fabricantes ofrecen versiones normales ("N") y de potencia ("P") del mismo motor. Las versiones "P" suelen tener configuraciones de devanado más agresivas diseñadas para una potencia máxima de salida, a menudo a expensas de la eficiencia. Están diseñados para carreras y estilo libre extremo donde se prioriza el empuje máximo sobre el tiempo de vuelo. Para la mayoría de los pilotos, las versiones estándar "N" proporcionan un mejor equilibrio entre rendimiento y eficiencia.
Conclusión
Seleccionar los motores adecuados para su dron FPV es una de las decisiones más trascendentales en el proceso de construcción. El motor perfecto no es necesariamente el más potente o el más caro, es el que mejor se adapta a sus requisitos específicos, estilo de vuelo y el resto de sus componentes.
Para los principiantes, recomiendo comenzar con motores de gama media en tamaños estándar (2306 o 2207 con 1800-2300KV para quads de estilo libre de 5") de fabricantes de renombre. A medida que desarrolle sus habilidades y preferencias, puede experimentar con opciones más especializadas adaptadas a su estilo de vuelo en evolución.
Recuerde que el rendimiento del motor es solo una parte de un sistema complejo. Los mejores motores no funcionarán bien con hélices mal combinadas, ESC inadecuados o una mala sintonización. Adopte un enfoque holístico para su construcción, asegurándose de que todos los componentes funcionen armoniosamente juntos.
El panorama de los motores FPV continúa evolucionando rápidamente, con los fabricantes empujando constantemente los límites de lo que es posible en términos de potencia, eficiencia y confiabilidad. Al comprender los principios y especificaciones fundamentales cubiertos en esta guía, estará bien equipado para navegar estos cambios y tomar decisiones informadas para sus construcciones.
Ya sea que estés construyendo tu primer dron o tu quincuagésimo, espero que esta guía te ayude a encontrar los motores perfectos para tus sueños de vuelo. ¡Felices vuelos!
Referencias y lecturas adicionales
- ESC para drones: Principios y funcionamiento
- Controladores de vuelo para drones: Principios y funcionamiento
- Resumen de los tipos de baterías para drones y su química
- Amortiguación de vibraciones en drones
Recursos externos
- Miniquad Test Bench - Datos completos de pruebas de motores
- Canal de YouTube de Joshua Bardwell - Explicaciones detalladas y tutoriales sobre motores
- Calculadora de motores eCalc - Herramienta para estimar el rendimiento del motor con diferentes hélices y baterías


