长距离飞行和扩展 FPV 无人机操作

经过多年挑战 FPV 无人机可能性的极限,我了解到长距离飞行代表着我们这个爱好中的终极自由和终极责任。这份全面指南提炼了我从数百次长距离任务中获得的经验——从我第一次紧张的 1 公里飞行到跨越数公里的山脉等等——涵盖了您需要了解的有关安全合法地扩展飞行范围的一切。
长距离飞行简介
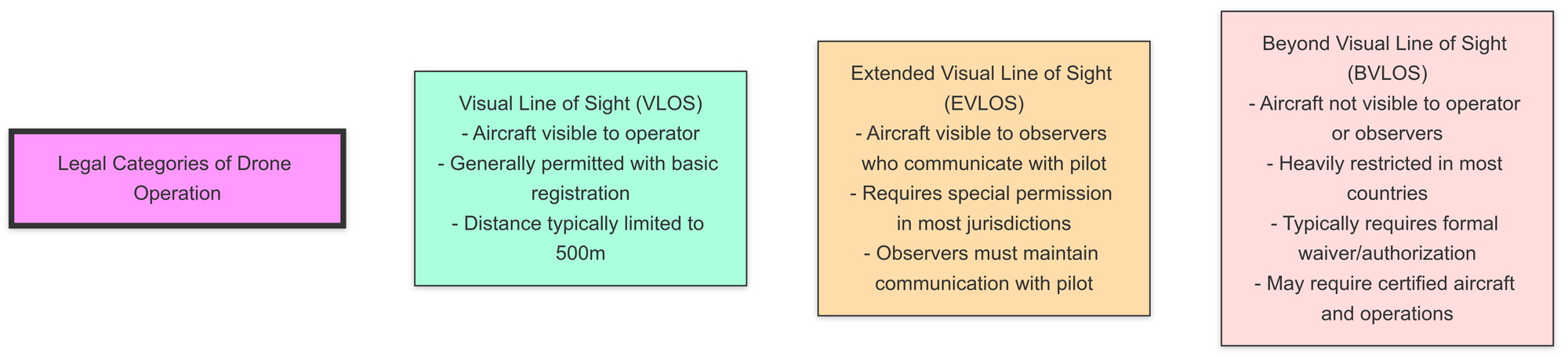
长距离飞行涉及在视线外 (BVLOS) 或远远超出典型 FPV 飞行距离的范围内操作无人机。虽然标准的 FPV 飞行可能会将无人机保持在 500 米以内,但长距离飞行可以延伸到几公里甚至几十公里。
这种类型的飞行提供独特的体验和能力:
- 探索:可以进入偏远的景观和视角
- 冒险:突破界限、发现新领域的刺激
- 电影机会:捕捉原本无法获得的镜头
- 技术挑战:掌握安全延伸操作所需的系统和技能
然而,长距离飞行也伴随着重大责任:
- 合法合规:了解并遵守通常明确限制 BVLOS 操作的法规
- 安全管理:实施强大的系统以防止飞失和事故
- 技术专长:掌握比典型 FPV 更复杂的系统
- 环境意识:在长距离飞行中尊重野生动物和自然区域
在我第一次长距离飞行之前,我花了几个月的时间研究、测试设备和练习技能。这种准备并非过度——而是必不可少的。长距离飞行几乎没有犯错的余地,因为在家附近可能是小问题的情况在您的飞机距离数公里时可能会变得灾难性。
长距离飞行的法律考量
长距离飞行的法律环境因国家和地区而异,但几乎普遍包括对视线外 (BVLOS) 操作的限制。
了解 BVLOS 法规
世界各地的大多数无人机法规都包含这一基本规则的某种版本:您必须始终与飞机保持视线联系。这与长距离 FPV 飞行存在内在的矛盾,因为飞行员的主要视角是通过相机。
长距离飞行的合法途径
在法律框架内进行长距离操作有几种方法:
- 获得 BVLOS 授权:一些管辖区为授权的 BVLOS 操作提供途径
- 需要正式的申请流程
- 可能需要操作员认证
- 通常仅限于商业运营
- 通常涉及广泛的安全文件
- EVLOS 操作:使用目视观察员保持技术合规性
- 观察员必须与飞机保持目视联系
- 飞行员和观察员之间可靠的沟通至关重要
- 可能需要事先通知或许可
- 观察员必须了解他们的职责
- 在不受限制的区域飞行:一些国家的偏远地区限制较少
- 仍需遵守高度和其他限制
- 可能需要事先通知当局
- 通常需要长途跋涉才能到达合适的地点
- 特殊活动/地点:获批准的活动或指定区域
- 无人机竞赛联盟有时会为活动获得 BVLOS 许可
- 一些国家已经建立了无人机走廊或测试区
- 通常是临时的,范围有限
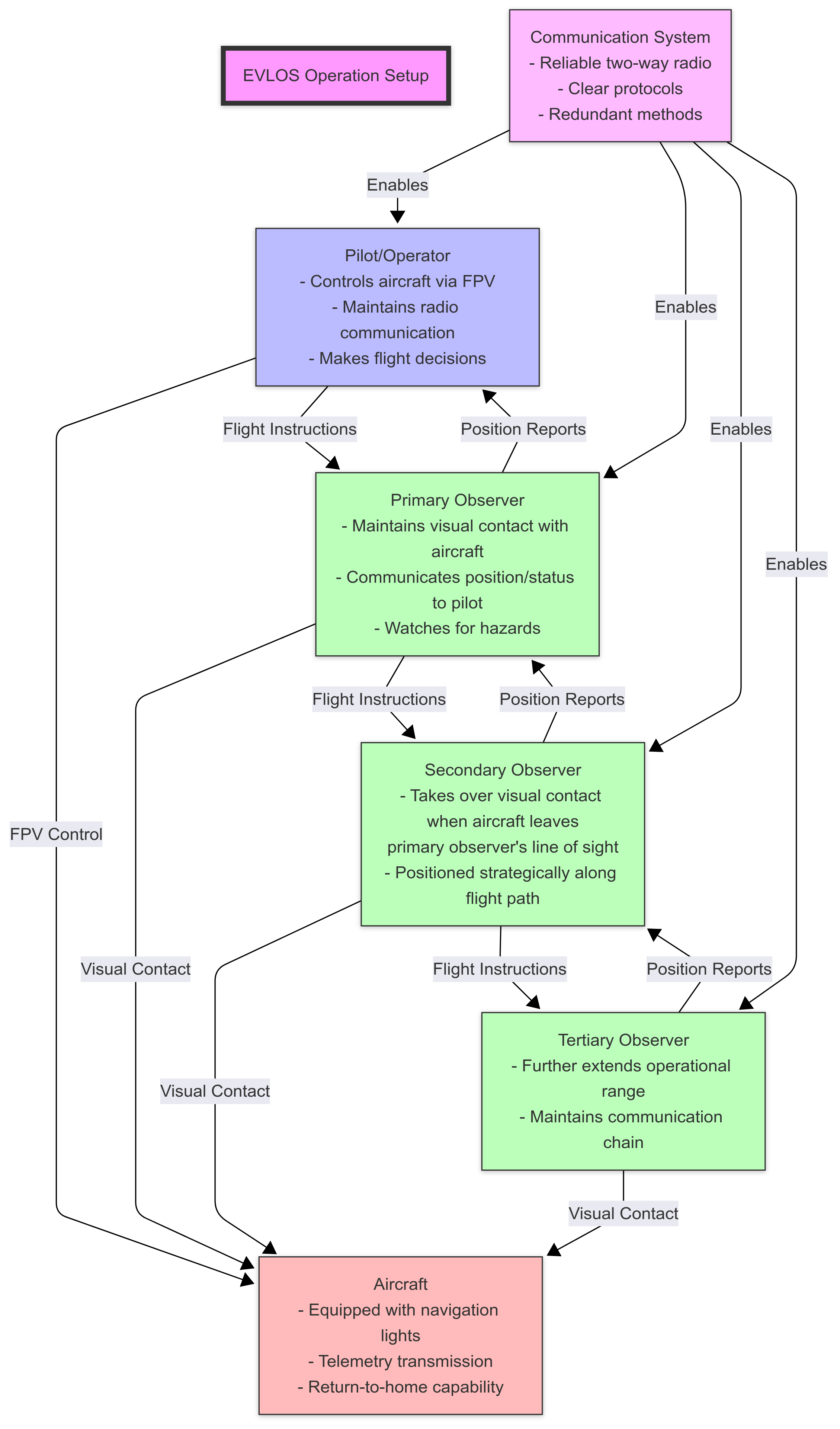
我发现,当通过可靠的观察员和沟通正确实施时,EVLOS 方法为许多地区负责任的爱好者提供了最实用的途径。然而,这需要仔细规划,并诚实地评估您的设置是否真正通过观察员保持了视线。
国家特定法规
法规因国家而异。以下是主要地区方法的概述:
| 国家/地区 | 监管机构 | BVLOS 可能性 | EVLOS 方法 | 特殊考虑因素 | 所需文件 |
|---|---|---|---|---|---|
| 欧盟 | EASA | 在特定类别中通过 SORA 流程可行 | 可能需要授权 | 三层系统:开放类、特定类、认证类 | 注册、操作员 ID、特定类别的风险评估 |
| 美国 | FAA | 极其有限,个人很少获得豁免 | 没有正式认可 | 现在需要远程 ID | 注册、娱乐用途的 TRUST 证书、商业用途的第 107 部分 |
| 英国 | CAA | 通过运营安全案例 (OSC) 可行 | 相对简单的流程 | 类似于英国脱欧前的欧盟规则 | 操作员 ID、飞手 ID、重量 >250g 的无人机注册 |
| 澳大利亚 | CASA | ReOC 持有人(商业)可行 | 在适当协议下允许 | 在偏远地区更灵活 | 注册、操作员认证或 RePL |
| 瑞士 | FOCA | 需要特别授权 | 事先批准后可能允许 | 山地飞行有特殊考虑因素 | 注册、操作员 ID、BVLOS 特别授权 |
| 加拿大 | 加拿大运输部 | 仅限 SFOC 持有人 | 在适当协议下可行 | 高级操作类别 | 基本或高级飞手证书、注册 |
| 新西兰 | CAA | 通过第 102 部分认证可行 | 在适当协议下认可 | 相对进步的方法 | 第 101 部分合规或第 102 部分认证 |
欧盟(EASA 法规)
欧盟在统一的监管框架下运作:
- 开放类:通常禁止 BVLOS 操作
- 特定类:通过风险评估(SORA 流程)允许 BVLOS
- 认证类:用于复杂的 BVLOS 操作(主要是商业)
对于业余爱好者来说,特定类别通过 SORA(特定操作风险评估)流程提供了一条潜在途径,尽管这很复杂,通常由商业运营商使用。
美国(FAA 法规)
FAA 对 BVLOS 保持严格限制:
- 第 107 部分(商业)和娱乐规则都禁止 BVLOS
- 可以获得豁免,但很少授予个人
- 远程 ID 要求现在使飞机可在远距离跟踪
- 娱乐飞行必须保持在视线范围内
英国
英国脱欧后,保持与 EASA 类似的法规:
- 标准许可要求 VLOS 操作
- 运营安全案例 (OSC) 可以实现 BVLOS
- 使用观察员进行 EVLOS 操作的流程相对简单
澳大利亚(CASA 法规)
澳大利亚提供一些灵活性:
- 标准操作要求 VLOS
- ReOC 持有人(商业)可以申请 BVLOS 批准
- 使用观察员可以进行 EVLOS 操作
- 偏远地区的执法更加宽松
瑞士
瑞士有特定考虑因素:
- FOCA 法规通常与 EASA 框架一致
- BVLOS 操作需要特别授权
- 由于地形原因,山地飞行有额外考虑因素
- 事先授权后,可能允许使用观察员进行 EVLOS 操作
有关各国具体法规的更详细信息,请参阅这些综合指南:
爱好者的实用合法方法
根据我在多个国家/地区导航法规的经验,以下是我的实用建议:
- 了解您飞行地点的确切法规
- 不确定时联系当局 - 大多数愿意提供指导
- 考虑使用适当的观察员协议采用 EVLOS 方法
- 记录您的安全程序和风险评估
- 加入可能已获得特别许可的当地俱乐部
- 准备好在被质疑时解释您的操作
- 切勿在限制空域或机场/直升机场附近飞行
- 无论飞行多远,都要遵守高度限制
- 保持适合您操作的保险范围
我曾经与一位在长距离飞行期间接近的航空检查员进行了富有成效的对话。通过展示我的安全协议、观察员通信系统和飞行计划文件,本可能是负面的遭遇变成了教育交流。透明度和责任感大有帮助。
长距离飞行的技术要求
成功的长距离操作需要专门的设备和仔细的系统集成。
控制链路系统
控制链路可以说是长距离系统中最关键的组件:
现代长距离控制系统
| 系统 | 频率 | 潜在范围 | 延迟 | 遥测 | 可靠性 | 备注 |
|---|---|---|---|---|---|---|
| ExpressLRS | 900MHz/2.4GHz | 30km+ / 10km+ | 5-12ms | 优秀 | 非常高 | 开源、高度可配置 |
| TBS Crossfire | 900MHz | 20km+ | 18-30ms | 优秀 | 非常高 | 成熟的生态系统、稳健 |
| TBS Tracer | 2.4GHz | 8km+ | 4-8ms | 良好 | 高 | 紧凑、高效 |
| ImmersionRC Ghost | 2.4GHz | 7km+ | 5-10ms | 良好 | 高 | 低功耗 |
| FrSky R9 | 900MHz | 10km+ | 18-30ms | 良好 | 中等 | 经济实惠的选择 |
对于严肃的长距离飞行,900MHz 系统(或在合法的地方使用 433MHz)在穿透性和范围方面具有显著优势。由于其出色的性能、开源特性和活跃的开发社区,ExpressLRS 已成为我的首选系统。
关键控制链路考虑因素:
- 数据包速率与范围:较低的数据包速率(例如,25Hz 对比 150Hz)可以显著增加范围
- 天线选择:定向天线可以显著扩展范围
- 失控保护配置:正确配置的失控保护是绝对必要的
- 分集系统:多天线/接收机可提高可靠性
- 遥测:双向通信提供关键的飞行数据
在尝试了各种系统后,我发现 900MHz 的 ExpressLRS 配合 25Hz 数据包速率和分集天线,可以为严肃的长距离任务提供最佳的范围、可靠性和响应性平衡。
有关控制系统的更多详细信息,请参阅我们的综合指南:
视频传输系统
视频链路为远程作业带来了独特的挑战:
远程视频系统比较
| 系统 | 类型 | 最大实用范围 | 远距离清晰度 | 穿透性 | 功率需求 |
|---|---|---|---|---|---|
| 模拟 5.8GHz | 模拟 | 使用定向天线 5-10km | 逐渐降低 | 中等 | 低 |
| DJI O3 | 数字 | 10-15km | 在掉线前保持清晰 | 好 | 中等 |
| HDZero | 数字 | 5-8km | 有一些伪影但仍好 | 中等 | 中等 |
| Walksnail Avatar | 数字 | 8-12km | 在掉线前保持清晰 | 好 | 中等 |
| 模拟 1.3GHz | 模拟 | 15-20km+ | 逐渐降低 | 优秀 | 高 |
为了最大化范围:
- 模拟 1.3GHz 系统提供卓越的范围,但在许多国家需要特殊许可
- 定向天线对于任何系统在极限范围内都是必不可少的
- 分集接收器配合多个天线可显著提高可靠性
- 数字系统在远距离时保持更好的清晰度,但往往会完全掉线而不是逐渐降低
我发现对于严肃的长距离飞行,双系统方法效果最好:使用数字系统(如DJI O3)作为主要视频以获得良好的清晰度,同时辅以长距离模拟系统,在数字系统掉线时仍能在极远距离维持可用的信号。
有关视频系统的更多信息,请参阅:
导航和返航系统
可靠的导航对于远程作业来说是不可或缺的:
GNSS(GPS)系统
现代 GNSS 接收器支持多个卫星星座:
- GPS(美国)
- GLONASS(俄罗斯)
- Galileo(欧盟)
- 北斗(中国)
多星座接收器可显著提高可靠性和准确性。对于长距离飞行,我认为在起飞前至少需要 14 颗卫星锁定,最好跨越至少两个星座。
GNSS 的关键考虑因素:
- 模块质量:更高质量的模块如 M8N、M9N 和 M10 系列可提供更好的性能
- 天线放置:远离干扰源,视野开阔
- 磁力计校准:对于准确的航向信息至关重要
- 冗余系统:考虑在关键任务中使用双 GNSS 模块
有关 GNSS 技术的详细信息,请参阅:
GNSS 技术
返航(RTH)配置
正确配置的 RTH 是防止飞行器失控的最后一道防线:
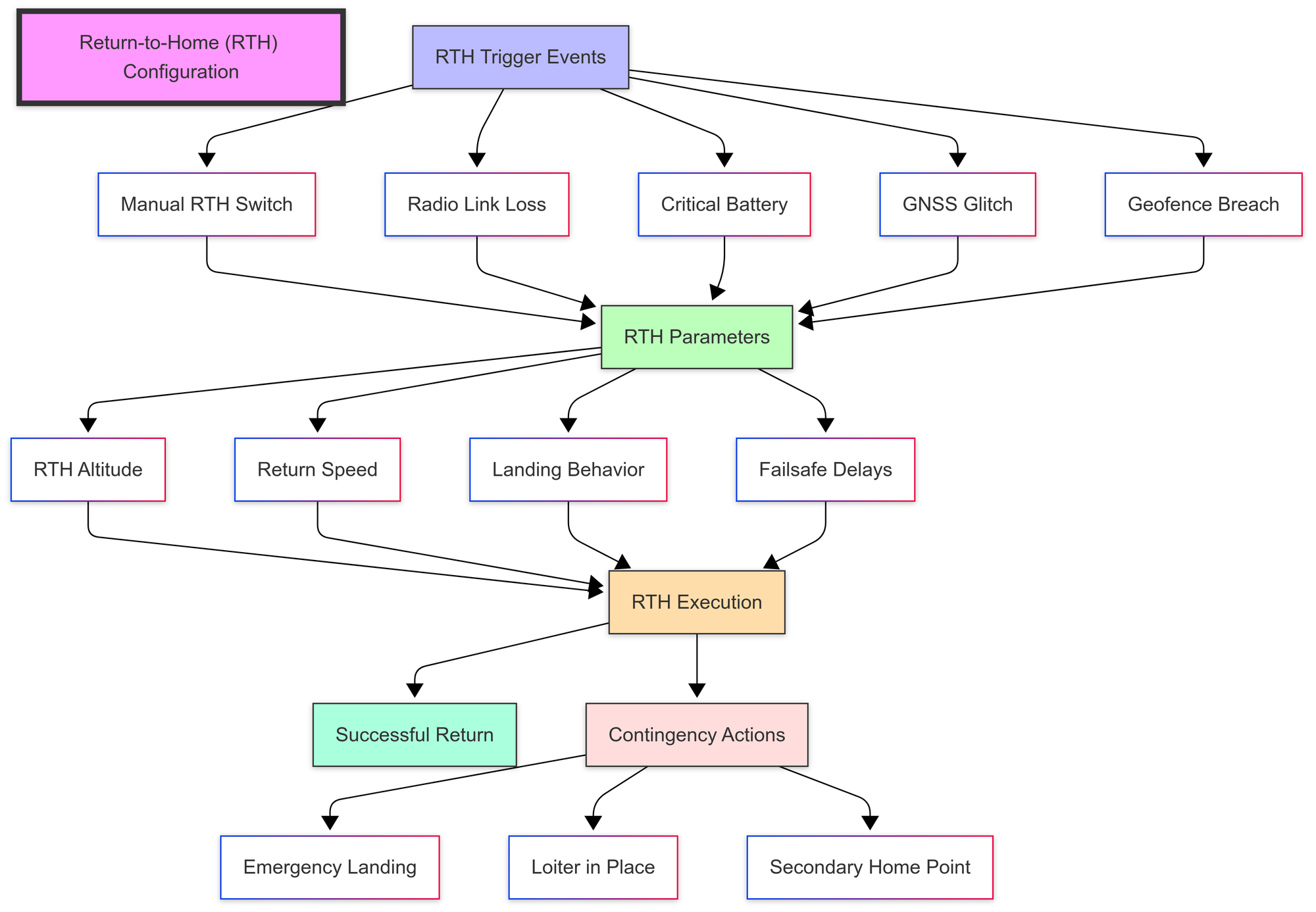
| RTH 参数 | 推荐设置 | 说明 | 常见错误 |
|---|---|---|---|
| RTH 高度 | 50-100m(根据地形调整) | 必须高于飞行器和返航点之间的所有障碍物 | 设置得太低,没有考虑树木/建筑物 |
| 返航速度 | 最大速度的 60-70% | 在效率和及时返航之间取得平衡 | 太快(电池效率低)或太慢(远距离时间过长) |
| 失控保护延迟 | 信号丢失 1.0-1.5 秒 | 防止误触发,同时快速捕捉真正的故障 | 太短(误触发)或太长(返航前漂移过多) |
| 电池阈值 | 每节 3.7-3.8V(锂聚合物),锂离子电池更高 | 确保有足够的电量进行返航 | 设置得太低,没有考虑负载下的电压下降 |
| 返航点 | 使用 14+ 颗卫星验证 | 准确的返航位置对于返航至关重要 | 没有等待正确的卫星锁定,没有验证位置 |
我在长距离机型上配置了三层 RTH 触发:
- 手动 RTH 开关,供飞行员启动返航
- 遥控链路丢失后 1.5 秒延迟触发 RTH
- 每节 3.7V 的关键电池 RTH(根据电池类型调整)
为了最大限度地提高可靠性,我总是在每次长距离任务之前在近距离测试 RTH 功能,验证:
- 飞行器爬升到正确的 RTH 高度
- 它直接返回到返航点
- 着陆行为符合预期
- 所有失控保护触发器都正常工作
机架考虑因素
并非所有无人机机架都适合远程作业:
长距离机架的理想特点
- 注重效率的设计:流线型的空气动力学设计,减轻重量
- 7英寸或更大的螺旋桨:比小尺寸螺旋桨效率更高
- 足够的组件空间:能容纳更大的电池和系统
- 流线型外形:减少阻力,提高航程
- 耐用的结构:在各种条件下都可靠
- GPS/天线安装选项:导航系统能清晰地看到天空
| 机架类型 | 长距离优点 | 长距离缺点 | 最佳用例 | 示例机型 |
|---|---|---|---|---|
| 7英寸拉长X型 | 前飞效率极佳,敏捷性和稳定性平衡,操控感熟悉 | 与H型机架相比组件空间有限,通常比真正的X型重 | 中等负载的全能长距离机 | iFlight XL7, TBS Source One 7", Diatone Roma F7 |
| 7英寸H型 | 最大的组件空间,更好的电池放置选择,通常更流线型 | 不如X型灵活,可能更重 | 重载长航程,复杂系统集成 | GEPRC Mark4 HD7, iFlight Chimera7, FlyWoo Explorer LR |
| 7英寸真X型 | 最轻的选择,最灵活,平衡的操控 | 前飞效率较低,组件空间通常更小 | 长距离花式飞行,远距离技术飞行 | AOS 7, iFlight Nazgul Evoque F7 |
| 8英寸以上机架 | 最高效率,最大负载能力,最长飞行时间 | 最重的选择,最不灵活,运输需要更大空间 | 最大航程任务,专业航拍 | BQE Endurance 8", iFlight XL8, GEPRC Crocodile 8" |
| 低矮设计 | 减少阻力,通常更轻,更好地穿透风 | 组件空间有限,可能更难组装 | 注重速度的长距离,大风条件 | HGLRC Wind8, iFlight Chimera8 HD, TBS Source One HD |
流行的长距离机架款式包括:
- 拉长X型布局:前飞效率更高
- H型机架:为组件和电池提供空间
- X/H混合设计:兼顾效率和组件空间
- 低矮设计:减小正面面积和阻力
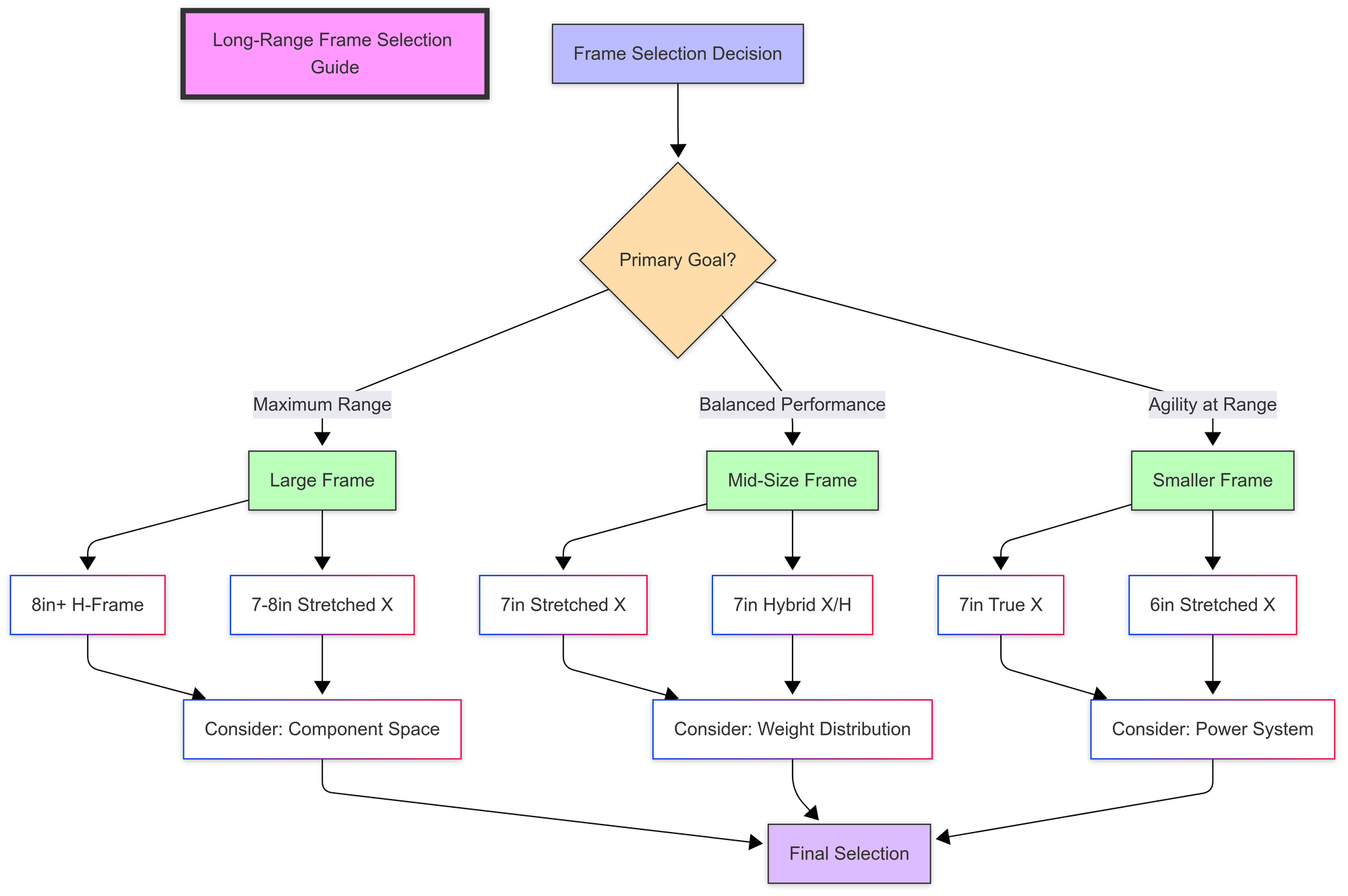
在尝试了众多机架后,我发现7英寸拉长X型或H型布局在效率、稳定性和组件容量方面达到了最佳平衡,非常适合严肃的长距离任务。
关于机架选择的更多信息,请参阅:
无人机机架:尺寸、材料和选择
电池和动力系统优化
电池选择和动力系统效率对于最大化航程至关重要:
长距离电池化学对比
| 电池类型 | 能量密度 | 重量 | 放电倍率 | 最佳用例 |
|---|---|---|---|---|
| LiPo | 中等 | 中等 | 高 | 平衡性能 |
| Li-ion | 高 | 轻 | 低-中等 | 最大航程,更轻重量 |
| LiHV | 中-高 | 中等 | 高 | 有动力需求时延长性能 |
| Li-ion/LiPo 混合 | 高 | 中等 | 中等 | 中等动力下优化长航程 |
为了最大化航程,锂离子电池提供了明显更高的能量密度,但电流输出能力有所降低。这使其非常适合高效巡航,但不太适合激进飞行。
电池选择的关键考虑因素:
- 容量 vs. 重量:如果重量惩罚降低了效率,更大并不总是更好
- 放电倍率:匹配您的动力系统要求
- 电芯配置:更高的电芯数在低油门时可以更高效
- 并联配置:考虑并联更小的电池组以获得更好的重量分布
- 温度管理:在长时间飞行中监控电池温度
我最喜欢的最大航程设置是使用21700电芯的6S锂离子电池组,与同等容量的LiPo相比,可提供大约60-70%的额外飞行时间,同时保持足够的动力输出以实现高效巡航。
关于电池选择的更多信息,请参阅:
无人机电池类型和化学成分概述
飞控和软件
飞控及其固件是您长距离系统的大脑:
长距离飞控的特点
基本功能包括:
- GNSS支持:多星座兼容性
- 气压计:高度保持和监控
- 指南针支持:精确的航向信息
- 电流/电压监控:实时动力系统数据
- 黑匣子记录:用于分析和改进性能
- 数传支持:双向数据通信
- 强大的处理器:F7或H7用于复杂操作
固件选项
长距离操作的流行固件选择:
- INAV:专为导航和长距离设计
- 出色的GPS模式和返航功能
- 强大的固定翼支持
- 活跃的开发社区
- Ardupilot:高度适合高级任务
- 全面的任务规划
- 出色地支持各种传感器
- 设置过程更复杂
- Betaflight:带GPS救援功能
- 出色的飞行性能
- 导航能力有限
- 更适合短距离任务
对于严肃的长距离飞行,我推荐iNav,它在用户友好性和导航能力之间取得了平衡,或者对于复杂的任务规划需求,可以选择Ardupilot。
关于飞控的更多信息,请参阅:
无人机飞控:原理与操作
构建远程系统
创建可靠的远程系统需要仔细选择组件并进行集成。
组件选择清单
构建远程系统时请使用此清单:
- 机架:7英寸或更大,注重效率的设计
- 电机:较低KV值(6S为1300-1700KV),注重效率
- 螺旋桨:较高螺距,注重效率的设计
- 飞控:带气压计和强大GNSS支持的F7/H7
- 电调:40A或更高,具有良好的热管理
- 控制链路:具有分集功能的远程系统(ExpressLRS/Crossfire)
- 视频系统:具有定向能力的主要和备用系统
- GNSS模块:支持多星座的高质量模块
- 电池:锂离子电池可实现最大范围,锂聚合物电池可实现平衡性能
- 天线:用于控制和视频的定向选项
- 电源管理:尽可能使用滤波、冗余电源
系统集成最佳实践
正确的集成与组件选择同样重要:
| 集成方面 | 常见错误 | 最佳实践 | 对范围的影响 |
|---|---|---|---|
| 干扰管理 | 将VTX放置在控制接收器附近,未屏蔽的线路 | RF组件的物理隔离,屏蔽信号线,滤波电源 | 控制链路可靠性提高20-30% |
| 天线放置 | 碳纤维下的GNSS天线,天线接触机架,极化不良 | GNSS天线置于顶部,视野开阔,控制天线远离导电材料,正确的极化对准 | 信号质量提高30-50% |
| 配电 | 敏感组件使用未滤波电源,单一电源路径 | 飞控和接收器使用滤波电源,冗余电源路径,电压监控 | 降低噪音,运行更可靠 |
| 重量和平衡 | 过重,重心不良,不必要的组件 | 优化组件选择,前飞平衡重心,极简方法 | 飞行效率提高10-20% |
我发现,即使使用相同的部件,仔细关注系统集成也能使有效范围提高一倍,而不是随意组装组件。
远程构建示例
以下是一个经过验证的远程构建组件清单:
- 机架:7英寸iFlight XL7 V5或TBS Source One V5
- 电机:2306-1750KV或2507-1500KV
- 螺旋桨:7x4.5或7x5,注重效率
- 飞控:搭载iNav的Matek H743-WING
- 电调:45A 4合1,带BlHeli_32
- 控制链路:ExpressLRS 900MHz,带分集接收器
- 视频系统:DJI O3 Air Unit,带模拟备份
- GNSS:Matek M10Q-5883多星座模块
- 电池:6S 5000-6000mAh锂离子电池组
- 天线:地面使用贴片/定向天线,飞机使用全向天线
该设置在保持良好飞行特性的同时,持续提供10公里以上的范围和可靠的返航能力。
飞行计划和准备
适当的计划对于安全和成功的远程操作至关重要。
飞行前计划流程
按照以下系统方法进行飞行计划:
- 路线规划
- 研究该区域的卫星图像
- 识别潜在的危险和障碍
- 规划主要和备用路线
- 建立紧急着陆区
- 检查地形间隙的高程剖面
- 合规性
- 验证空域限制
- 获得必要的许可
- 如果使用EVLOS方法,计划观察员位置
- 如果需要,通知相关部门
- 检查临时飞行限制
- 天气评估
- 检查各个高度的风况
- 验证能见度和云量
- 考虑太阳相对于飞行路径的位置
- 监测降水预报
- 在炎热天气下检查热状况
- 通信计划
- 建立观察员通信协议
- 确保可靠的通信方式
- 定义标准术语和程序
- 为通信失败制定计划
- 向所有团队成员简要说明紧急程序
我使用Windy、Meteoswiss、UAV Forecast和自定义清单的组合,以确保每次远程任务都进行彻底的飞行计划。
任务规划软件
有几个软件选项可以帮助进行飞行计划:
- QGroundControl:用于Ardupilot/PX4的综合任务规划
- Mission Planner:用于Ardupilot系统的详细规划
- iNav Configurator:用于基于iNav的系统的基本规划
- Litchi:用于DJI平台的用户友好型规划
- Google Earth Pro:非常适合路线可视化和高程分析
对于复杂的任务,我通常在QGroundControl或Mission Planner中进行规划,然后将航点导出到我的飞控。
飞行前检查清单
这份全面的清单涵盖了飞行前的基本验证:
系统检查
- [ ] 所有固件更新到最新的稳定版本
- [ ] 电池充电和平衡(如果不立即飞行,则进行存储充电)
- [ ] 所有连接牢固并经过检查
- [ ] 螺旋桨经过检查并正确拧紧
- [ ] 控制面朝正确方向移动
- [ ] 故障保护经过测试和验证
- [ ] 最近测试过RTH功能
- [ ] GNSS锁定14颗以上卫星,跨多个星座
- [ ] 设置并验证了Home点
- [ ] 指南针校准并验证
- [ ] 遥测功能正常并显示正确的数据
- [ ] 视频传输清晰稳定
- [ ] 控制链路RSSI强度稳定
- [ ] 存储卡格式化并安装(如果在板载录制)
环境检查
- [ ] 天气状况在可接受的参数范围内
- [ ] 在飞行高度检查风速和风向
- [ ] 没有即将到来的天气系统
- [ ] 能见度足以供观察员使用
- [ ] 注意太阳位置,避免直接飞向太阳
- [ ] 发射区域清晰稳定
- [ ] 确定了恢复区域
- [ ] 没有意外的障碍物或危险
- [ ] 附近没有有人驾驶的飞机
- [ ] 直接区域内没有人或车辆
操作检查
- [ ] 审查并加载了飞行计划
- [ ] 观察员就位并测试了通信
- [ ] 如果需要,已通知有关部门
- [ ] 与团队一起审查了应急程序
- [ ] 电池容量充足,有30%的储备
- [ ] 验证返航路线没有障碍物
- [ ] 高度计划考虑了地形和障碍物
- [ ] 通信设备充电并正常工作
- [ ] 备用设备准备就绪(如果适用)
- [ ] 考虑了时间限制(日光、电池寿命等)
我会将这个清单塑封,并在每次长距离飞行前实际检查每一项。多年来,这种纪律防止了许多潜在的问题。
长距离飞行技巧
成功的长距离飞行需要与典型的FPV飞行不同的特定技巧。
高效飞行技巧
最大化航程需要高效的飞行:
- 巡航油门管理
- 找到油门的"最佳位置"(通常为30-40%)
- 保持一致的高度,避免不必要的爬升
- 使用平缓转弯而不是激进的机动
- 避免快速油门变化
- 风力管理
- 规划路线时考虑风向
- 如果可能,在出站时逆风飞行
- 利用更高的高度找到有利的风况
- 计算地速与空速,用于航程规划
- 高度优化
- 较高的高度通常可以改善信号传播
- 在高度和电池效率之间取得平衡
- 考虑地形和障碍物
- 战略性地利用高度获得风力优势
- 电池管理
- 监控负载下的电压而不是百分比
- 了解你的电池的电压下垂特性
- 考虑温度对性能的影响
- 计划保守的转弯点(剩余60%电量)
通过仔细的测试,我发现我的7英寸长航时建造在35%油门时达到最大效率,在平静条件下使用6S 6000mAh锂离子电池组可提供大约25km的总航程。
导航技巧
保持态势感知至关重要:
- 视觉参考
- 识别并使用独特的地标
- 注意太阳位置以进行定向
- 使用道路、河流和其他线性特征作为指引
- 创建地形的心理地图
- 利用遥测
- 监控到家的距离和方向
- 持续跟踪高度
- 使用人工地平线进行定向
- 定期验证GNSS状态
- 方向管理
- 练习以各种方向飞行
- 在适当时使用定向保持模式
- 了解远距离时的控制反转
- 保持对飞机相对于家的方向的认识
- 应急程序
- 知道何时手动触发RTH
- 了解何时接管自动化系统
- 练习从迷失方向中恢复
- 为视频或控制链路退化制定协议
我总是保持我路线的"心理面包屑",注意独特的特征,即使导航系统失效,这些特征也可以指引我回家。
通信协议
与观察员合作时,清晰的沟通至关重要:
- 标准术语
- 使用清晰、一致的术语
- 确认对关键信息的理解
- 为常见情况制定速记
- 避免模棱两可的指示
- 观察员协调
- 战略性地安排观察员
- 在观察员之间建立明确的交接程序
- 确保所有观察员了解飞机的能力
- 在关键飞行前练习沟通
- 紧急通信
- 为各种情况制定明确的协议
- 建立优先通信规则
- 确保所有团队成员了解应急程序
- 练习应急情景
我与观察员使用的一个简单但有效的协议包括标准呼叫,如"目视确认"(观察员有目视接触)、"过渡请求"(准备移交给下一个观察员)和"指令接受"(确认收到指令)。
风险管理和应急程序
长距离飞行涉及必须系统管理的固有风险。
风险评估框架
使用这种结构化方法来评估和减轻风险:
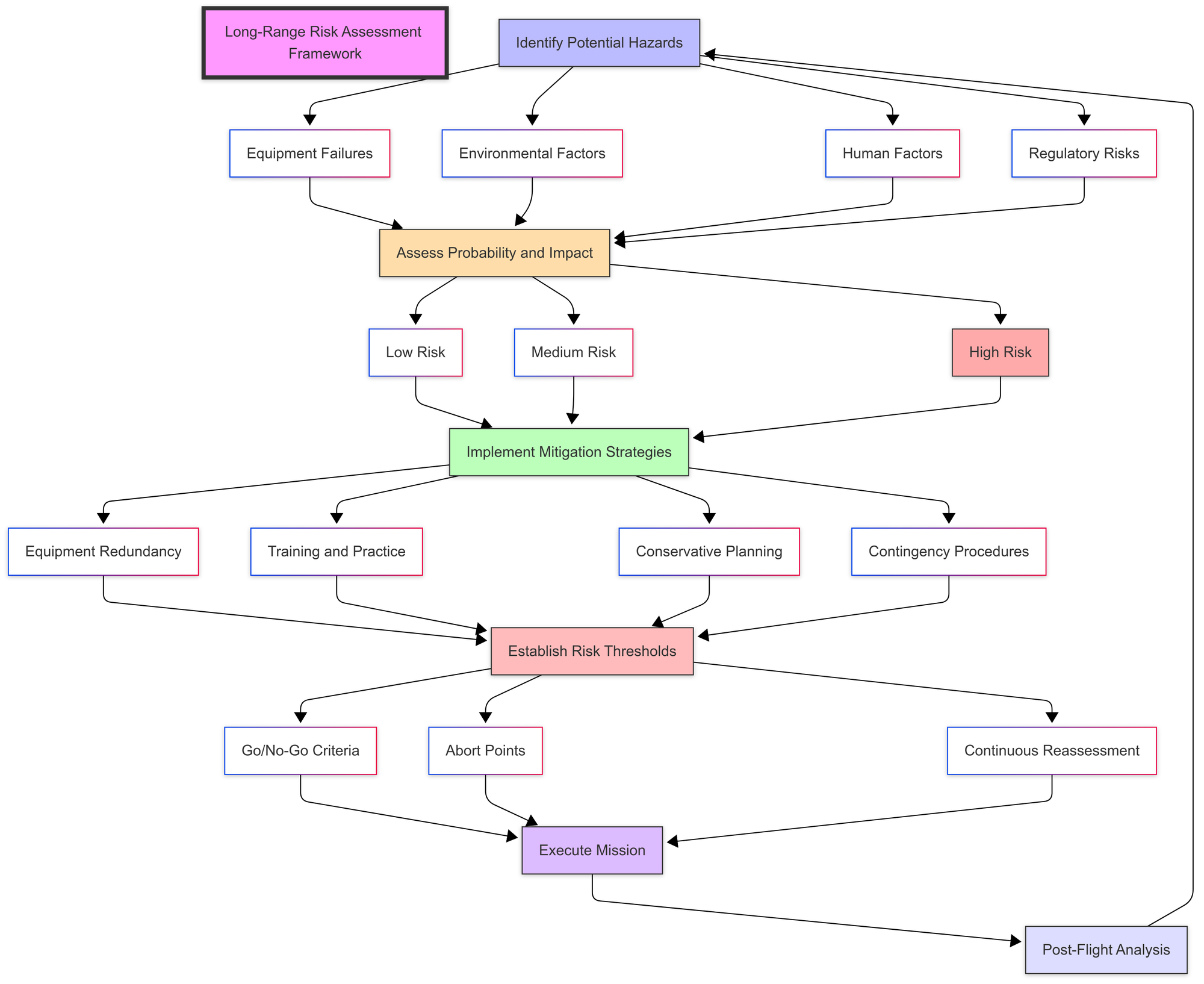
| 风险类别 | 示例 | 缓解策略 | Go/No-Go 标准 |
|---|---|---|---|
| 设备故障 | 控制链路丢失、视频系统故障、电池故障、GPS 丢失 | 冗余系统、飞行前测试、保守的范围限制 | 未经测试的设备不能飞行,最少 14 颗卫星锁定,完整的故障保护测试 |
| 环境因素 | 大风、能见度差、降水、地形障碍 | 天气预报、路线规划、高度管理 | 风速 >25km/h 不能飞行,降水天气不能飞行,能见度 <3km 不能飞行 |
| 人为因素 | 飞行员疲劳、观察员失误、通信中断 | 团队培训、明确的协议、休息要求 | 疲劳时不能飞行,没有经过简报的观察员不能飞行,没有通信检查不能飞行 |
| 监管风险 | 空域违规、许可要求、观察员合规性 | 飞行前研究、文件准备、通知相关部门 | 限制空域内不能飞行,没有所需许可不能飞行,没有适当文件不能飞行 |
我会为复杂的长距离任务制定正式的风险评估文件,这对于识别不明显的风险和适当的缓解措施非常有价值。
常见故障模式和应对
为这些常见问题做好准备:
控制链路失效
- 预防:多样化系统、距离测试、天线定位
- 应对:允许自动返航接管,除非必要,否则避免手动干预
- 恢复:监控遥测数据,确保正确执行自动返航
视频链路失效
- 预防:双系统、定向天线、电源管理
- 应对:保持直线飞行,切换到备用视频系统
- 恢复:使用遥测数据判断方向,考虑手动返航
GNSS 失效
- 预防:多星座系统、干扰缓解
- 应对:切换到姿态模式,保持方向,开始返航
- 恢复:使用视觉参考和遥测进行导航
电池失效
- 预防:保守的规划、温度管理
- 应对:立即返航、降低功耗
- 恢复:必要时确定紧急着陆区
方向丢失
- 预防:保持视觉参考、使用定向保持模式
- 应对:调平飞机、检查遥测方向
- 恢复:如果迷失方向持续,使用自动返航
对于每种故障模式,我都会在安全距离内定期练习应对程序,然后再尝试长距离飞行。
紧急着陆程序
当无法自动返航时:
- 选址标准
- 远离人和建筑物的开阔区域
- 方便回收
- 最小化危险(水、电线等)
- 在FPV画面中可见
- 控制下降技巧
- 保持前进动量
- 逐渐降低高度
- 尽可能迎风进场
- 接地前切断动力
- 回收计划
- 通过遥测标记着陆位置
- 使用卫星图像导航
- 考虑财产准入问题
- 携带适当的回收工具
起飞前,我总是沿计划路线确定至少三个潜在的紧急着陆区。
高级长距离能力
对于有经验的飞行员,这些高级能力可以增强长距离作业。
航点任务
自动化航点任务提供精确性和一致性:
- 任务规划软件
- QGroundControl
- Mission Planner
- iNav Configurator
- DJI/Litchi(用于DJI平台)
- 航点类型
- 位置航点(经纬度/高度)
- 动作航点(相机触发等)
- 条件航点(基于传感器/时间)
- 返航点
- 任务参数
- 航点间速度
- 航点盘旋时间
- 高度变化
- 航向要求
- 安全考虑
- 故障保护集成
- 电池监控
- 地理围栏
- 手动控制能力
我使用航点任务执行复杂路线或需要精确定位的情况,但始终保持手动控制能力并积极监控任务。
地形跟随
先进的系统可以保持与地形的一致高度:
- 实现方法
- 雷达/激光雷达高度计
- 气压计与地形数据库结合
- 基于地图的预编程高度变化
- 配置参数
- 地形上方的最小安全高度
- 前视距离
- 对地形变化的响应速率
- 最大爬升/下降率
- 局限性
- 传感器精度和可靠性
- 地形数据库分辨率
- 处理要求
- 所需的安全裕度
地形跟随需要仔细测试和保守的安全裕度,但可以在山区执行原本极具挑战性的飞行。
长距离FPV学科
长距离飞行的专门方法:
山地冲浪
- 紧贴地形轮廓飞行
- 需要出色的深度感知和反应时间
- 通常使用高性能的机型
- 需要对飞行区域有深入的了解
越野探险
- 多阶段飞行,需要更换电池
- 需要地面支援团队
- 专注于最大飞行距离的达成
- 通常使用固定翼或垂直起降平台
长距离花式飞行
- 将长距离与特技动作结合
- 与纯长距离相比,需要更高功率的系统
- 在效率和性能之间取得平衡
- 通常使用6英寸机架,在航程和灵活性之间平衡
航拍任务
- 在远距离捕捉特定拍摄对象
- 强调稳定性和相机质量
- 通常使用更大、更稳定的平台
- 可能会整合云台系统
我发现山地冲浪特别有意思,不过在尝试远距离飞行之前,需要在近距离进行大量练习。
设备与配件
专业设备可以增强长距离飞行的能力。
地面站设置
合适的地面站可以显著改善长距离飞行体验:
- 天线系统
- 定向天线(平板、螺旋、八木)
- 天线追踪器(手动或自动)
- 分集接收机
- 放大器(在法律允许的情况下)
- 监控设备
- 用于遥测的辅助屏幕
- 频谱分析仪
- 电池电压监视器
- 信号强度指示器
- 支援设备
- 天气监测工具
- 观察员通讯系统
- 备用电源
- 屏幕遮阳罩
- 舒适性考虑
- 长时间飞行的座椅
- 防晒/防风雨
- 水和食物
- 合适的衣物

我的便携式地面站包括一个折叠椅、一张小桌子、带平板和全向天线的分集接收机、遥测显示器以及观察员通讯耳机。这套设备可以装进一个背包,但提供了有效进行长距离飞行所需的所有基本装备。
天线追踪器
天线追踪器可以显著改善信号质量:
- 手动追踪器
- 需要操作员手动瞄准天线
- 简单可靠
- 成本较低
- 适合初学者
- 自动追踪器
- 使用遥测数据自动瞄准天线
- 解放操作员,专注于飞行
- 设置更复杂
- 前期投入较高
- DIY选项
- 基于Arduino的追踪器
- 3D打印机构
- 遥测驱动定位
- 对有经验的制作者而言性价比高

我一开始使用一个简单的手动追踪器,由三脚架和定向平板天线组成,与静态设置相比,这提高了我大约40%的有效范围。对于严肃的长距离飞行,我现在使用自动追踪器,在整个飞行过程中保持完美的天线对准。
关于天线的更多信息,请参阅:
便携式电源解决方案
长时间飞行需要可靠的电源:
- 电池选项
- 锂电池电源站
- 太阳能充电器
- 带适当输出的移动电源
- 车载电源逆变器
- 电源管理
- 优先考虑关键系统
- 监控功耗
- 准备备用选项
- 考虑运行时间要求

对于全天候的飞行,我使用大容量锂电池和可折叠太阳能电池板的组合,这为我的地面站提供了足够的电力,同时保持了便携性,适合在偏远地区使用。
法律和道德最佳实践
负责任的长距离飞行不仅仅局限于技术考量。
文件和许可
保存适当的文件:
- 必要文件
- 无人机注册信息
- 驾驶员认证/执照
- 保险文件
- 飞行日志和维护记录
- 风险评估和飞行计划
- 许可程序
- 起飞/降落的土地所有者许可
- 需要时的空域授权
- 观察员协议和简报
- 通知相关部门
- 在保护区的特别许可
我为每个飞行地点保留一个专用文件夹,其中包含所有相关文件、许可和联系信息。当局或其他利益相关者提出问题时,这已被证明是非常宝贵的。
环境考虑
最大限度地减少对自然和野生动物的影响:
- 野生动物保护
- 研究该地区的敏感物种
- 与野生动物保持适当距离
- 避开筑巢区和繁殖季节
- 监测动物反应并相应调整
- 噪音管理
- 使用高效螺旋桨以减少噪音
- 在敏感区域上空保持较高高度
- 考虑操作的时间
- 限制在任何一个区域的飞行时间
- 物理影响
- 在发射/着陆点不留痕迹
- 制定最大限度减少环境影响的恢复计划
- 考虑在敏感区域降落的替代方案
- 避免扰乱土壤、植物或栖息地
我曾经在发现计划的山地飞行将经过受保护的鹰巢附近后中止了飞行。虽然令人失望,但尊重野生动物和保护区对负责任的飞行员来说是不可协商的。
社区关系
与更广泛的社区保持积极的关系:
- 公众认知管理
- 准备好解释你的活动
- 展示安全措施和预防措施
- 分享美丽而非有争议的镜头
- 充当这个爱好的大使
- 合作机会
- 与当地俱乐部和组织合作
- 参与社区教育
- 协助搜救或保护工作
- 与其他飞行员分享知识
- 避免冲突
- 远离人口稠密区飞行
- 尊重隐私问题
- 尊重地回应问题或疑虑
- 愿意根据反馈修改计划
与土地所有者、地方当局和社区建立积极的关系,开启了原本无法进入的惊人飞行机会。花时间解释你的安全协议并分享航拍的美丽,可以将怀疑者转变为支持者。
远程飞行成功的专业提示
在多年挑战远程飞行极限后,我总结出这些深入见解:
天气优化
了解天气模式至关重要:
- 热活动
- 早晚通常提供更平静的条件
- 可见的积雨云表明活跃的热气流
- 黑暗的地面特征会产生更强的热气流
- 一致的风向表明有组织的热气流模式
- 风层
- 风在不同高度经常改变方向和速度
- 使用显示各种高度风的天气预报工具
- 尝试不同高度以找到有利的风况
- 考虑地形附近的风梯度效应
- 气压系统
- 高压系统通常提供更好的飞行条件
- 气压上升通常表明条件正在改善
- 气压下降可能预示着天气系统即将来临
- 稳定的气压表明条件一致
我曾经通过爬升到250米高度在返程时抓住顺风,有效地通过巧妙利用天气条件将电池容量翻了一番,从而获得额外的5公里航程。
航程优化技术
最大化你的有效航程:
- 空气动力学改进
- 干净的构建,最小的突起
- 正确拉紧的电池带
- 流线型天线安装
- 最小暴露的接线
- 减重策略
- 更轻的电池选择(锂离子 vs 锂聚合物)
- 最少的硬件
- 适当使用碳纤维部件
- 评估每个组件的必要性
- 动力系统效率
- 电机和螺旋桨匹配以提高巡航效率
- 电调设置优化
- 最小怠速油门
- 电池负载优化
- 信号优化
- 频率协调以避免干扰
- 天线极化匹配
- 地面站高度
- 信号路径中的最小障碍物
通过系统的测试和优化,我在不改变任何主要组件的情况下,仅通过仔细调整和优化现有系统,就将我的主要远程构建的航程提高了40%以上。
心理准备
远程飞行的心理方面常常被忽视:
- 压力管理
- 练习逐步增加距离
- 建立对系统的信心
- 在心理上为各种情况做准备
- 根据舒适度知道何时中止
- 专注技巧
- 在关键飞行期间消除干扰
- 保持态势感知
- 为仪表开发扫描模式
- 练习信息优先级排序
- 决策
- 在飞行前建立go/no-go标准
- 在任务期间定义中止触发器
- 从安全决策中消除情绪
- 相信你的准备和系统
我发现心理准备与技术准备同样重要。当你的飞机距离数公里远时,保持冷静并做出理性决策的能力是一种必须通过渐进练习培养的技能。
常见问题:关于远程飞行的常见问题
远程飞行合法吗?
合法性完全取决于你的位置和操作方式。大多数国家禁止在没有特别授权的情况下进行超视距(BVLOS)操作。然而,在许多司法管辖区,使用目视观察员维持EVLOS操作可以是合法的,前提是有适当的协议。始终研究你所在地区的具体规定,考虑获得适当的授权,切勿在限制空域飞行。如果你不确定计划操作的合法性,最负责任的做法是直接联系你当地的航空管理局。
有关国家具体规定的更详细信息,请参阅这些全面指南:
Here is the translated content with the same formatting and updated links:
目前技术可以实现的最大航程是多少?
在最佳条件和设备下,使用900MHz控制系统、高质量视频链路和高效飞行器,业余级别的系统可以实现30多公里的航程。商用系统的航程可以显著延长。然而,负责任操作的实际限制取决于您遵守法律、确保安全和管理风险的能力,而不是设备的技术限制。专注于构建具有适当冗余的可靠系统,而不是最大理论航程。
进行长距离飞行需要特殊许可证吗?
这因国家而异。在许多管辖区,标准无人机注册和基本驾驶员认证足以满足VLOS操作要求,而BVLOS操作可能需要额外的许可或豁免。一些国家要求某些发射机(尤其是高功率或非标准频率系统)需要无线电操作员许可证。研究您所在地区和预期操作的具体要求。如有疑问,请联系您所在国家的航空管理部门寻求指导。
长距离飞行最好的无线电系统是什么?
目前,ExpressLRS和TBS Crossfire是长距离操作的领先控制链路系统。由于其开源性质、出色的性能和活跃的开发社区,ExpressLRS已经获得了显著的普及。为了获得最大航程,900MHz系统(或在合法的地方使用433MHz)比2.4GHz系统具有显著优势,因为它们具有更好的障碍物穿透和信号传播特性。理想的系统取决于您的具体要求、预算和所在地区的监管环境。
有关控制系统的更多详细信息,请参阅我们的综合指南:
如何防止无人机失控?
防止无人机失控需要多层保护:
- 在接收器和飞控上正确配置和测试失控保护
- 为电池电压和信号丢失设置保守的返航触发点
- 定期校准和验证指南针
- 起飞前确保GPS卫星锁定充足
- 起飞前全面测试所有系统
- 制定保守的飞行计划,留有充足的余量
- 定期维护和检查所有组件
在近距离彻底测试失控保护和返航系统之前,切勿尝试长距离飞行。
如何延长视频传输距离?
要最大限度地延长视频传输距离:
- 在地面站使用定向天线(平板、螺旋或八木)
- 实现天线追踪器(手动或自动)
- 将地面站天线放置在视线清晰的位置
- 使用带有多种天线类型的分集接收器
- 为您的环境选择合适的频段
- 考虑双视频系统(数字主系统加模拟备份)
- 优化飞机上的天线放置
- 使用高质量、低损耗的电缆和连接器
为了获得最大航程,许多有经验的飞行员使用数字和模拟系统的组合,以利用数字的清晰度和模拟的平稳退化。
有关FPV系统的更多详细信息,请参阅我们的综合指南:
长距离飞行最适合什么电池?
为了获得最大航程,锂离子电池提供了最佳的能量密度,与同等的锂聚合物电池相比,可以提供更长的飞行时间。21700格式的三星40T、索尼VTC6或Molicel P42A等电芯为长航程构建提供了出色的性能。然而,锂离子电池的放电率较低,适合高效巡航,但不太适合激进飞行。为了平衡性能和航程,可以考虑锂离子/锂聚合物混合电池组或高质量的LiHV电池。始终确保您的电源系统与您选择的电池相匹配。
有关电池选择的更多信息,请参阅:
无人机电池类型和化学成分概述
如何计算无人机的最大航程?
理论航程可以使用以下因素估算:
- 电池容量和巡航油门下测得的电流消耗
- 控制链路规格和测试性能
- 视频系统的航程限制
- 您所在地区的监管限制
然而,实际航程几乎总是受到超出简单电池容量的因素限制,包括风况、安全裕度、法律要求和风险管理考虑。保守的方法是计划只使用60%的电池容量用于外出飞行,留下40%用于返航和应急。
如果失去视频信号该怎么办?
如果失去视频信号:
- 保持直线平稳飞行——避免突然移动
- 检查遥测数据以获取方向和位置信息
- 如果可用,切换到备用视频系统
- 如果合适,增加高度以改善信号传播
- 如果迷失方向持续,手动启动返航
- 监控遥测数据以确保成功返航
- 如有必要,准备切换到姿态模式
在近距离练习这种情况,以培养适当反应的肌肉记忆。
是否需要专门的地面站设备?
虽然基本的长距离飞行可以使用标准设备完成,但专门的地面站组件可以显著提高可靠性和有效航程:
- 定向天线可以显著增强信号强度
- 分集接收器可以提高信号可靠性
- 天线追踪器可以在整个飞行过程中保持最佳信号
- 用于遥测的辅助监视器可以提供关键信息
- 适当的座位和防风雨保护可以使飞行员更好地集中注意力
从基本设备开始,随着航程和经验的增加逐步升级。
结论
长距离飞行代表了FPV爱好在技术成就方面的巅峰,也承担着最大的责任。在视觉范围之外驾驶飞机的能力为探索、摄影和纯粹的飞行乐趣开辟了令人难以置信的可能性,但它也要求最高水平的准备、技能和道德考虑。
在我从紧张的1公里飞行到自信的多公里远征的过程中,我了解到成功的长距离飞行建立在同等重要的三个基础之上:
- 技术卓越:可靠的系统具有适当的冗余,经过全面测试和维护
- 操作纪律:细致的规划、保守的决策和全面的风险管理
- 道德责任:遵守法律、尊重环境和积极的社区关系
长距离飞行最有益的方面不仅仅是达到距离里程碑——而是对这一爱好所有方面的全面掌握。通过长距离飞行中谨慎的进展所培养的技能,可以提升您在无人机操作各个方面的能力。
对于那些开始长距离飞行的人,我鼓励采取有条不紊的方法:从彻底的研究开始,构建可靠的系统,在渐进的距离上广泛测试,并始终将安全和责任置于距离成就之上。真正的成就不在于你飞得多远,而在于你如何安全、合法、负责地进行操作。
长距离飞行的未来可能会看到技术的持续改进,可能还会伴随着不断发展的监管框架,为授权的BVLOS操作提供更正式的途径。通过在我们当前的操作中展示责任和安全,我们作为一个社区可以帮助积极塑造这个未来。
无论您是在探索山脉、捕捉独特的景观视角,还是简单地享受延长飞行的纯粹自由,长距离飞行都提供了在这个爱好的任何其他方面都无法复制的体验。通过正确的方法,它可以以安全、合法和负责任的方式进行——为那些愿意投入准备和练习的人打开一个充满可能性的世界。
参考资料和延伸阅读
外部资源
- UAV Forecast - 为无人机飞行员提供天气和飞行条件预测
- QGroundControl - 综合地面控制站软件
- Mission Planner - Ardupilot的飞行规划和配置
- iNav Configurator - iNav固件的配置工具
- ExpressLRS Project - 开源长距离遥控系统
- Joshua Bardwell的YouTube频道 - 深入的教程和信息


