ロングレンジフライングと拡張FPVドローン運用

FPVドローンの可能性を追求し続けた長年の経験から、ロングレンジフライトは私たちのホビーにおける究極の自由と究極の責任の両方を表していることを学びました。この包括的なガイドでは、初めての1kmフライトから数キロメートルにわたる山越えまで、数百回のロングレンジミッションで得た経験を凝縮し、安全かつ合法的にフライトエンベロープを拡張するために必要なすべてのことを網羅しています。
ロングレンジフライトの紹介
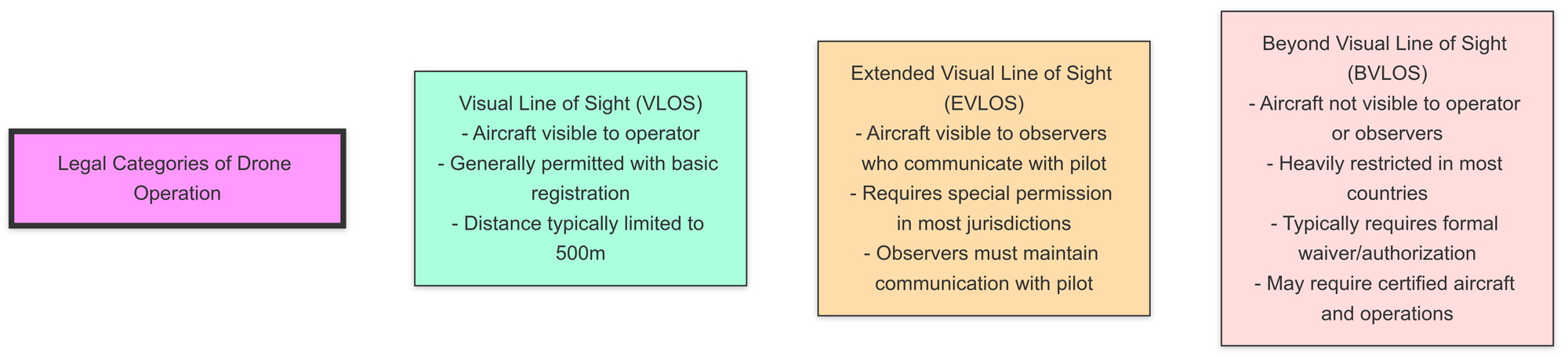
ロングレンジフライトとは、視界外(BVLOS)またはFPVフライトの一般的な距離よりもはるかに遠くでドローンを操作することを意味します。標準的なFPVフライトではドローンを500メートル以内に留めるのに対し、ロングレンジフライトでは数キロメートルあるいは数十キロメートルにまで及ぶことがあります。
このタイプのフライトは、ユニークな体験と能力を提供します:
- 探検: 遠隔の風景や視点へのアクセス
- アドベンチャー: 限界に挑戦し、新しいエリアを発見するスリル
- 映画的な機会: 他の方法では不可能なフッテージの撮影
- 技術的な挑戦: 安全な長距離運用に必要なシステムとスキルの習得
しかし、ロングレンジフライトには大きな責任が伴います:
- 法令遵守: BVLOSオペレーションを明示的に制限することが多い規制の理解と順守
- 安全管理: フライアウェイや事故を防ぐための堅牢なシステムの実装
- 技術的専門知識: 一般的なFPVよりも複雑なシステムの習得
- 環境意識: 長距離フライト中の野生生物と自然地域の尊重
最初のロングレンジフライトの前に、私は何ヶ月も研究、機器のテスト、スキルの練習に費やしました。この準備は過剰ではなく、不可欠でした。ロングレンジフライトでは、エラーの余地はほとんどありません。自宅の近くでは小さな問題でも、機体が数キロ離れているときには壊滅的になる可能性があるからです。
ロングレンジフライトの法的考慮事項
ロングレンジフライトの法的状況は国や地域によって大きく異なりますが、ほぼ普遍的に視界外(BVLOS)オペレーションに関する制限が含まれています。
BVLOS規制の理解
世界中のほとんどのドローン規制には、この基本ルールのバージョンが含まれています: 常に機体と視覚的な見通し線を維持しなければならない。これは、パイロットの主な視界がカメラを通してであるロングレンジFPVフライトと本質的に矛盾しています。
ロングレンジフライトへの法的アプローチ
法的枠組みの中でロングレンジオペレーションを行うにはいくつかのアプローチがあります:
- BVLOS認可の取得: 一部の管轄区域ではBVLOSオペレーションの認可プロセスを提供しています
- 正式な申請プロセスが必要
- オペレーターの認定が必要な場合がある
- 多くの場合、商用オペレーションに限定される
- 通常、広範な安全文書が必要
- EVLOSオペレーション: 技術的なコンプライアンスを維持するために目視観測者を使用
- 観測者は機体との目視接触を維持する必要がある
- パイロットと観測者の間の信頼できる通信が不可欠
- 事前の通知や許可が必要な場合がある
- 観測者は自分の責任を理解する必要がある
- 制限のない地域でのフライト: 一部の国には制限の少ない遠隔地がある
- それでも高度やその他の制限を順守する必要がある
- 当局への事前通知が必要な場合がある
- 適切な場所に到達するには長距離の移動が必要なことが多い
- 特別なイベント/ロケーション: 認可されたイベントや指定エリア
- ドローンレースリーグは時々イベントのためにBVLOS許可を取得する
- 一部の国ではドローン回廊やテストエリアが設けられている
- 通常は一時的で範囲が限定される
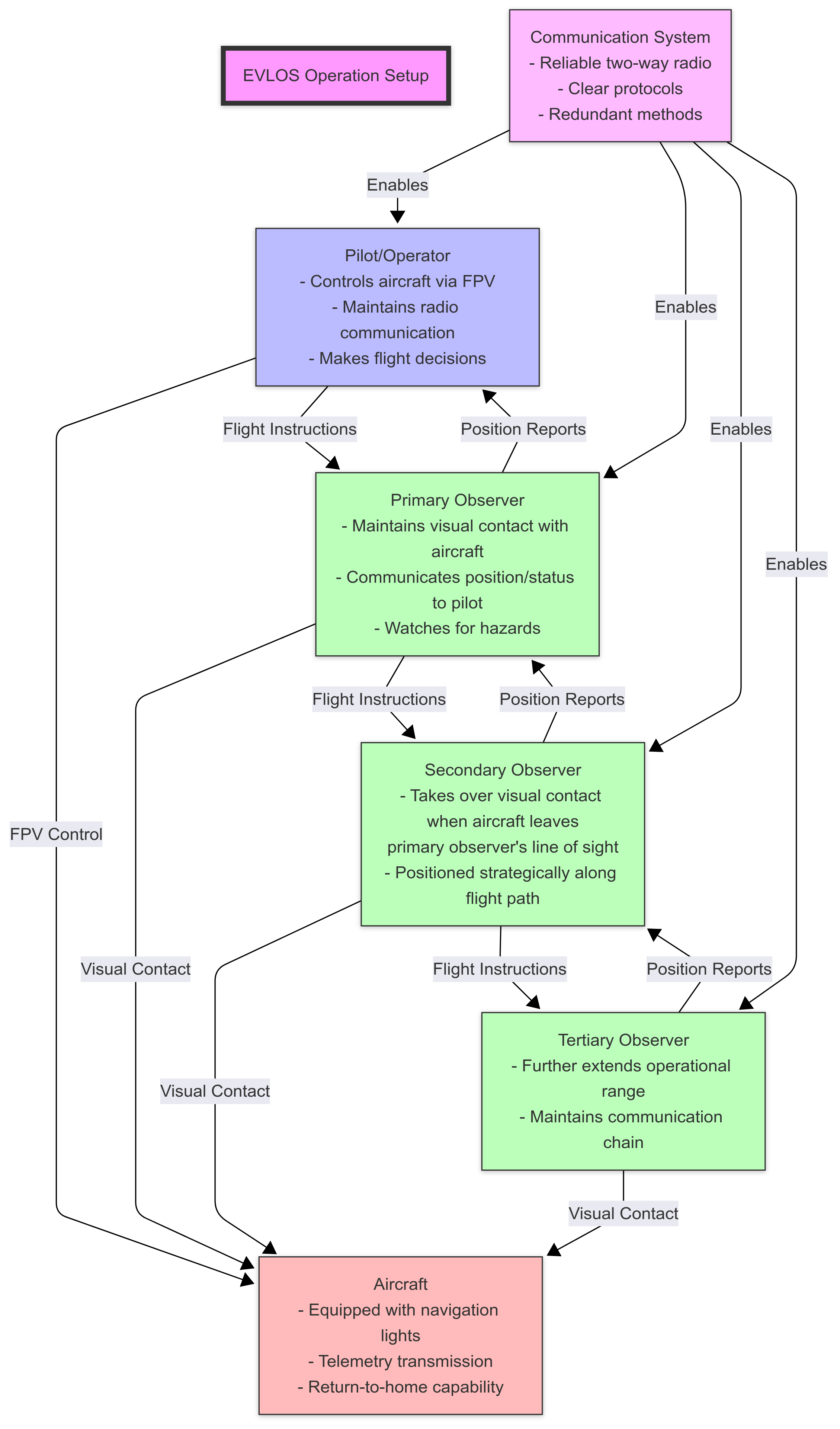
信頼できる観測者と通信を適切に実装すれば、EVLOSアプローチは多くの地域の責任あるエンスージアストにとって最も実用的な道筋を提供すると私は考えています。ただし、これには慎重な計画と、セットアップが本当に観測者を通して視覚的な見通し線を維持しているかについての絶対的な正直さが必要です。
国別の規制
規制は国によって大きく異なります。主要地域のアプローチの概要は次のとおりです:
| 国・地域 | 規制当局 | BVLOSの可能性 | EVLOSアプローチ | 特別な考慮事項 | 必要な書類 |
|---|---|---|---|---|---|
| 欧州連合 | EASA | SORAプロセスを経た特定カテゴリーで可能 | 認可が必要な場合あり | オープン、特定、認証の3段階システム | 登録、オペレーターID、特定カテゴリーのリスクアセスメント |
| アメリカ合衆国 | FAA | 非常に限定的、個人への免除はほとんど認められない | 正式には認められていない | リモートIDが必須に | 登録、レクリエーション用TRUSTサーティフィケート、商用Part 107 |
| イギリス | CAA | 運用安全ケース(OSC)で可能 | 比較的簡単なプロセス | Brexit前のEU規則と類似 | オペレーターID、フライヤーID、250g超のドローン登録 |
| オーストラリア | CASA | ReOC保持者(商用)に可能 | 適切な手順があれば許可 | 遠隔地ではより柔軟 | 登録、オペレーター認定またはRePL |
| スイス | FOCA | 特別認可が必要 | 事前承認があれば許可される可能性あり | 山岳飛行に特別な考慮事項 | 登録、オペレーターID、BVLOSには特別認可 |
| カナダ | Transport Canada | SFOC保持者に限定 | 適切な手順があれば可能 | 高度な運用カテゴリー | 基本または上級パイロット証明書、登録 |
| ニュージーランド | CAA | Part 102認証で可能 | 適切な手順があれば認められる | 比較的進歩的なアプローチ | Part 101準拠またはPart 102認証 |
欧州連合(EASA規則)
EUは統一された規制の枠組みの下で運営されています:
- オープンカテゴリー: 一般的にBVLOS運用を禁止
- 特定カテゴリー: リスクアセスメント(SORAプロセス)でBVLOSを許可
- 認証カテゴリー: 複雑なBVLOS運用(主に商用)向け
趣味の飛行者にとって、特定カテゴリーはSORA(Specific Operations Risk Assessment)プロセスを通じて可能性のある道筋を提供しますが、これは複雑で通常は商用オペレーターが使用します。
アメリカ合衆国(FAA規則)
FAAはBVLOSに厳しい制限を維持しています:
- Part 107(商用)とレクリエーション規則の両方がBVLOSを禁止
- 免除は可能だが、個人にはほとんど認められない
- リモートID要件により、機体は遠隔から追跡可能に
- レクリエーション飛行は視界内に留まる必要あり
イギリス
Brexit後、イギリスはEASAと類似の規制を維持:
- 標準許可はVLOS運用を要求
- 運用安全ケース(OSC)でBVLOSが可能に
- オブザーバーを使ったEVLOS運用は比較的簡単なプロセス
オーストラリア(CASA規則)
オーストラリアはある程度の柔軟性を提供:
- 標準運用はVLOSを要求
- ReOC保持者(商用)はBVLOS承認を申請可能
- オブザーバーを使ったEVLOS運用が可能
- 遠隔地ではより許容的な執行が見られる
スイス
スイスには特別な考慮事項があります:
- FOCA規則は一般的にEASAの枠組みに沿っている
- BVLOS運用には特別認可が必要
- 地形のため、山岳飛行には追加の考慮事項あり
- オブザーバーを使ったEVLOS運用は事前認可で許可される可能性あり
各国の規制に関するより詳細な情報については、これらの包括的なガイドを参照してください:
愛好家のための実践的な法的アプローチ
複数の国の規制をナビゲートした経験に基づき、ここに実践的なアドバイスを示します:
- 飛行場所の正確な規制を知る
- 不明な点は当局に問い合わせる - ほとんどは喜んでガイダンスを提供してくれる
- 適切なオブザーバー手順でEVLOSアプローチを検討
- 安全手順とリスクアセスメントを文書化する
- 特別許可を取得しているかもしれない地元クラブに参加
- 質問された場合、運用について説明できるよう準備
- 制限空域や空港・ヘリポート近くでは絶対に飛行しない
- どれだけ遠くまで飛ばすかに関わらず、高度制限を守る
- 運用に適した保険をかける
かつて、長距離セッション中に近づいてきた航空監督官と生産的な会話をしたことがあります。安全手順、オブザーバー通信システム、フライト計画文書を示すことで、ネガティブな遭遇になり得たものが教育的な交流になりました。透明性と責任感は長い道のりを行きます。
長距離飛行のための技術的要件
長距離運用の成功には、専門の機器と慎重なシステム統合が求められます。
制御リンクシステム
制御リンクは、長距離システムの中で間違いなく最も重要なコンポーネントです:
最新の長距離制御システム
| システム | 周波数 | 到達可能距離 | レイテンシ | テレメトリー | 信頼性 | 備考 |
|---|---|---|---|---|---|---|
| ExpressLRS | 900MHz/2.4GHz | 30km+ / 10km+ | 5-12ms | 優秀 | 非常に高い | オープンソース、高度に設定可能 |
| TBS Crossfire | 900MHz | 20km+ | 18-30ms | 優秀 | 非常に高い | 確立されたエコシステム、堅牢 |
| TBS Tracer | 2.4GHz | 8km+ | 4-8ms | 良好 | 高い | コンパクト、効率的 |
| ImmersionRC Ghost | 2.4GHz | 7km+ | 5-10ms | 良好 | 高い | 低消費電力 |
| FrSky R9 | 900MHz | 10km+ | 18-30ms | 良好 | 中程度 | 予算に優しいオプション |
本格的な長距離飛行では、900MHzシステム(または合法な場合は433MHz)が浸透と到達距離で大きな利点を提供します。ExpressLRSは、その優れたパフォーマンス、オープンソースの性質、活発な開発コミュニティのおかげで、私の選択するシステムになりました。
制御リンクの主な考慮事項:
- パケットレートと到達距離: パケットレートを下げる(例: 150Hzから25Hzへ)と、到達距離が大幅に伸びる
- アンテナの選択: 指向性アンテナは到達距離を大きく延ばせる
- フェイルセーフの設定: 適切に設定されたフェイルセーフは絶対不可欠
- ダイバーシティシステム: 複数のアンテナ/受信機で信頼性が向上する
- テレメトリー: 双方向通信で重要なフライトデータが得られる
様々なシステムを試した結果、900MHzのExpressLRSを25Hzのパケットレートとダイバーシティアンテナで使用するのが、本格的な長距離ミッションに最適な到達距離、信頼性、応答性のバランスだと分かりました。
制御システムの詳細については、以下の包括的ガイドをご覧ください:
ビデオ伝送システム
長距離運用では、ビデオリンクに特有の課題があります:
長距離用ビデオシステムの比較
| システム | タイプ | 最大実用到達距離 | 長距離での鮮明度 | 障害物透過性 | 電力要件 |
|---|---|---|---|---|---|
| アナログ5.8GHz | アナログ | 指向性で5-10km | 徐々に劣化 | 中程度 | 低 |
| DJI O3 | デジタル | 10-15km | 途切れるまで鮮明さを維持 | 良好 | 中程度 |
| HDZero | デジタル | 5-8km | 多少のアーチファクトはあるが良好 | 中程度 | 中程度 |
| Walksnail Avatar | デジタル | 8-12km | 途切れるまで鮮明さを維持 | 良好 | 中程度 |
| アナログ1.3GHz | アナログ | 15-20km以上 | 徐々に劣化 | 優秀 | 高 |
最大到達距離のために:
- アナログ1.3GHzシステムは優れた到達距離を実現するが、多くの国で特別な免許が必要
- 指向性アンテナは、極端な距離ではどのシステムでも不可欠
- ダイバーシティ受信機と複数アンテナで信頼性が大幅に向上
- デジタルシステムは長距離で鮮明さを維持しやすいが、徐々に劣化するのではなく完全に途切れる傾向がある
本格的な長距離飛行には、デュアルシステムアプローチが最適だと分かりました。DJI O3のようなデジタルシステムをメインビデオとして鮮明さを確保しつつ、デジタルシステムが途切れた場合に極端な距離でも使用可能な信号を維持できる長距離アナログシステムをバックアップとして使用します。
ビデオシステムの詳細については、以下をご覧ください:
ナビゲーションとリターントゥホームシステム
長距離運用には信頼性の高いナビゲーションが不可欠です:
GNSS (GPS) システム
最新のGNSS受信機は複数の衛星コンステレーションをサポートしています:
- GPS (アメリカ)
- GLONASS (ロシア)
- Galileo (欧州連合)
- BeiDou (中国)
マルチコンステレーション受信機は信頼性と精度を大幅に向上させます。長距離飛行では、少なくとも2つのコンステレーションで合計14機以上の衛星をロックしてから離陸するのが理想的です。
GNSSの主な考慮事項:
- モジュールの品質: M8N、M9N、M10シリーズなどの高品質モジュールはより高い性能を発揮
- アンテナの配置: 干渉源から離れ、空がよく見える場所に設置
- 磁気計のキャリブレーション: 正確な方位情報に不可欠
- 冗長システム: 重要なミッションではGNSSモジュールの二重化を検討
GNSS技術の詳細については、以下をご覧ください:
GNSS技術
リターントゥホーム (RTH) の設定
適切に設定されたRTHは、フライアウェイに対する最後の防衛線です:
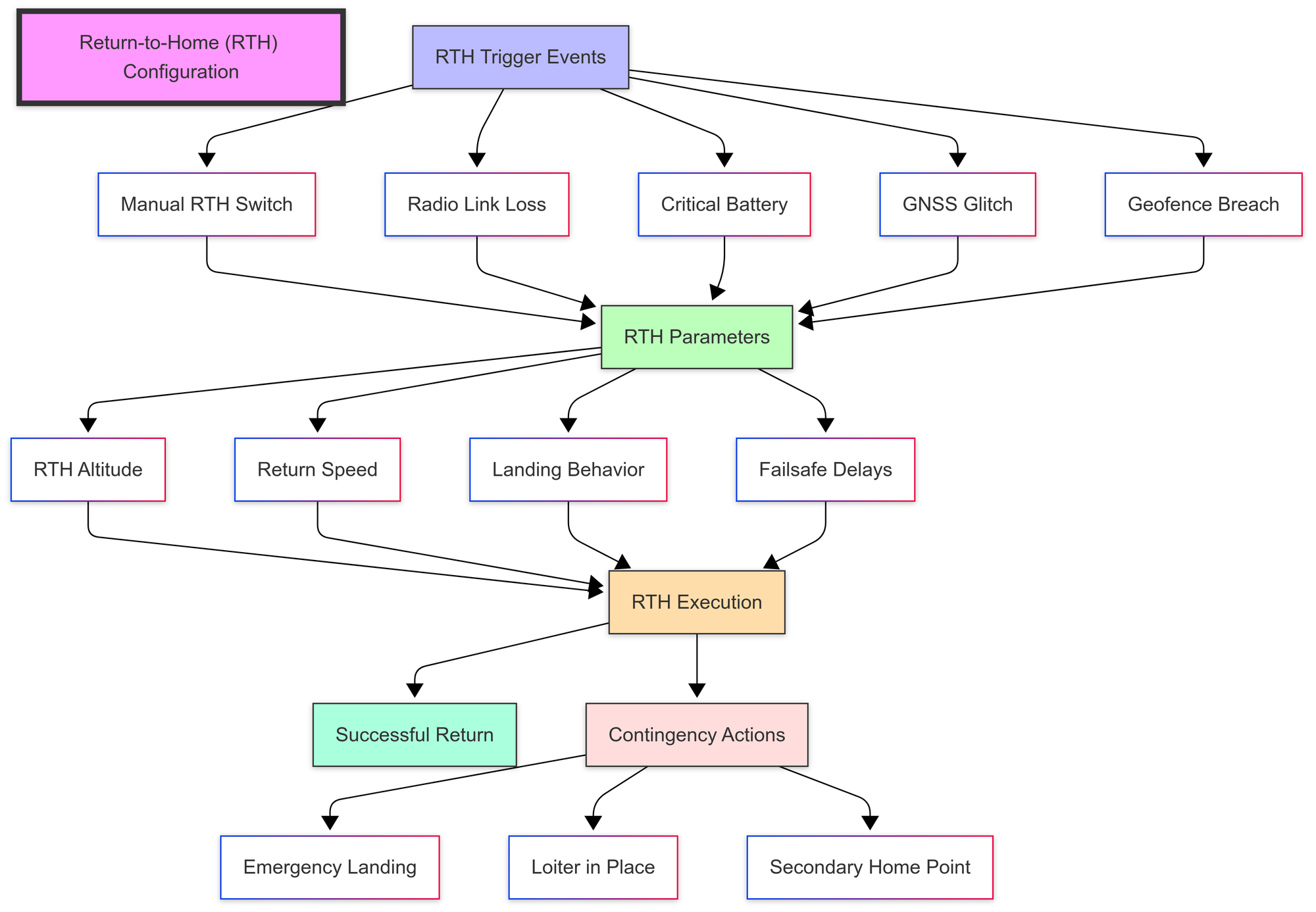
| RTHパラメータ | 推奨設定 | 説明 | よくある間違い |
|---|---|---|---|
| RTH高度 | 50-100m (地形に応じて調整) | 機体とホームポイント間のすべての障害物を超えていること | 地形に対して低すぎる設定、木や建物を考慮していない |
| リターン速度 | 最大速度の60-70% | 効率と適時のリターンのバランスを取る | 速すぎる (バッテリー効率が悪い) または遅すぎる (距離での過剰な時間) |
| フェイルセーフ遅延 | 信号損失で1.0-1.5秒 | 誤作動を防ぎつつ、実際の故障を素早くキャッチ | 短すぎる (誤作動) または長すぎる (リターン前の過剰なドリフト) |
| バッテリー閾値 | LiPoでセルあたり3.7-3.8V、Li-ionではより高く | リターンに十分な電力を確保 | 低すぎる設定、負荷時の電圧サグを考慮していない |
| ホームポイント | 14機以上の衛星で検証済み | 正確なホーム位置がリターンに不可欠 | 適切な衛星ロックを待たない、位置を検証しない |
私は長距離機のRTHトリガーを3層で設定しています:
- パイロットが開始するマニュアルRTHスイッチ
- 無線リンク損失後1.5秒でRTH
- バッテリー残量が少ない場合、セルあたり3.7VでRTH (バッテリータイプに応じて調整)
最大限の信頼性のために、長距離ミッションの前には必ず近距離でRTH機能をテストし、以下を確認します:
- 機体が正しいRTH高度まで上昇する
- ホームポイントに直接リターンする
- 着陸動作が期待通りに機能する
- すべてのフェイルセーフトリガーが適切に動作する
機体の考慮事項
すべてのドローン機体が長距離運用に適しているわけではありません:
長距離フレームの理想的な特性
- 効率重視の設計: 空力性能の向上、重量の削減
- 7インチ以上のプロペラ: 小型プロペラよりも効率が良い
- 十分なコンポーネントスペース: 大型バッテリーやシステムを収納するスペース
- 流線型のプロファイル: 抵抗を減らし、より長い航続距離を実現
- 耐久性の高い構造: さまざまな条件下での信頼性
- GPS/アンテナの取り付けオプション: ナビゲーションシステムのための空の明瞭な視界
| フレームタイプ | 長距離のメリット | 長距離のデメリット | 最適な用途 | 代表的なモデル |
|---|---|---|---|---|
| 7" ストレッチドX | 前進飛行の効率が非常に良い, 機敏性と安定性のバランスが良い, 慣れ親しんだ操縦感覚 | Hフレームと比較してコンポーネントスペースが限られている, 一般的にトゥルーXよりも重い | 中程度のペイロードを搭載したオールラウンドな長距離 | iFlight XL7, TBS Source One 7", Diatone Roma F7 |
| 7" Hフレーム | 最大のコンポーネントスペース, バッテリー配置の選択肢が多い, 多くの場合より流線型 | X構成ほど機敏ではない, 重くなる可能性がある | 重量物の長距離運搬, 複雑なシステム統合 | GEPRC Mark4 HD7, iFlight Chimera7, FlyWoo Explorer LR |
| 7" トゥルーX | 最も軽量, 最も機敏, バランスの取れた操縦性 | 前進飛行の効率が低い, コンポーネントスペースが少ない傾向 | 長距離フリースタイル, 遠距離での技術的飛行 | AOS 7, iFlight Nazgul Evoque F7 |
| 8インチ以上のフレーム | 最大の効率, 最大のペイロード容量, 最長の飛行時間 | 最も重い選択肢, 最も機敏性に欠ける, 運搬にスペースが必要 | 最長距離ミッション, プロ向け空撮 | BQE Endurance 8", iFlight XL8, GEPRC Crocodile 8" |
| ローポロファイル設計 | 抵抗の低減, 軽量化, 風への貫通性の向上 | コンポーネントスペースの制限, 組み立てが難しい場合がある | スピード重視の長距離, 強風条件 | HGLRC Wind8, iFlight Chimera8 HD, TBS Source One HD |
人気の長距離フレームスタイルには以下のようなものがあります:
- ストレッチドX構成: 前進飛行の効率が良い
- Hフレーム: コンポーネントとバッテリーのスペースが確保できる
- ハイブリッドX/H設計: 効率とコンポーネントスペースのバランス
- ローポロファイル設計: 正面投影面積と抵抗の低減
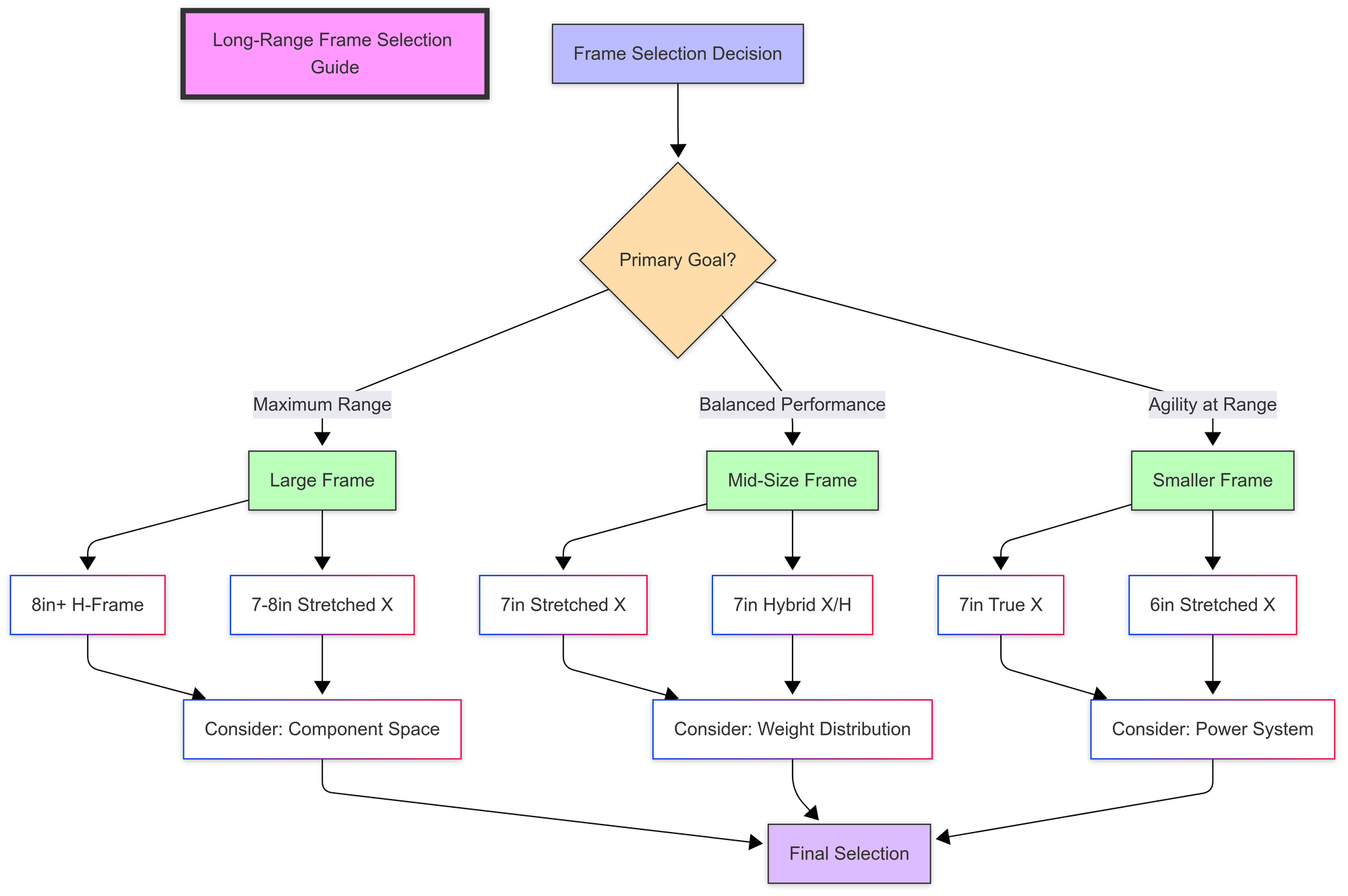
多くのフレームを試した結果、7インチのストレッチドXまたはH構成が、本格的な長距離ミッションに最適な効率、安定性、コンポーネント収容力のバランスを提供することがわかりました。
フレーム選択の詳細については、以下を参照してください:
ドローンのフレーム: サイズ、素材、選び方
バッテリーと電力システムの最適化
航続距離を最大化するには、バッテリーの選択と電力システムの効率が重要です:
長距離用バッテリー化学の比較
| バッテリータイプ | エネルギー密度 | 重量 | 放電レート | 最適な用途 |
|---|---|---|---|---|
| LiPo | 中程度 | 中程度 | 高い | バランスの取れたパフォーマンス |
| Li-ion | 高い | 軽い | 低〜中程度 | 最大航続距離、軽量化 |
| LiHV | 中〜高 | 中程度 | 高い | パワー要求のある長時間パフォーマンス |
| Li-ion/LiPoハイブリッド | 高い | 中程度 | 中程度 | 中程度のパワーでの最適化された長距離 |
最大航続距離のためには、Li-ionバッテリーが大幅に高いエネルギー密度を提供しますが、電流処理能力は低下します。これにより、効率的な巡航には理想的ですが、アグレッシブな飛行には適していません。
バッテリー選択の重要なポイント:
- 容量vs重量: 重量ペナルティが効率を下げる場合、大きいほど良いとは限らない
- 放電レート: 電力システムの要件に合わせる
- セル構成: セル数が多いほど低スロットルで効率的
- 並列構成: 重量配分のために小型パックの並列を検討
- 温度管理: 長時間飛行中のバッテリー温度を監視
私が最大航続距離のために好んで使用するセットアップは、21700セルを使用した6S Li-ionパックで、同等容量のLiPoと比較して約60〜70%長い飛行時間を提供しつつ、効率的な巡航に十分なパワー供給を維持します。
バッテリー選択の詳細については、以下を参照してください:
ドローンバッテリーの種類と化学の概要
フライトコントローラーとソフトウェア
フライトコントローラーとそのファームウェアは、長距離システムの頭脳です:
長距離用フライトコントローラーの機能
必須機能は以下の通りです:
- GNSSサポート: 複数の測位システムに対応
- 気圧計: 高度保持と監視
- コンパスサポート: 正確な方位情報
- 電流/電圧監視: リアルタイムの電力システムデータ
- ブラックボックスロギング: パフォーマンスの分析と改善のため
- テレメトリーサポート: 双方向データ通信
- 堅牢なプロセッサ: 複雑な操作のためのF7またはH7
ファームウェアオプション
長距離運用に人気のファームウェア選択肢:
- INAV: ナビゲーションと長距離用に特別に設計
- 優れたGPSモードとRTH機能
- 強力な固定翼サポート
- 活発な開発コミュニティ
- Ardupilot: 高度なミッションに対応
- 包括的なミッション計画
- 各種センサーに優れたサポート
- より複雑なセットアッププロセス
- Betaflight: GPSレスキュー機能付き
- 優れたフライトパフォーマンス
- 限定的なナビゲーション機能
- 短距離ミッションに適している
本格的な長距離飛行には、ユーザーフレンドリーさとナビゲーション機能のバランスが取れたiNavを推奨します。複雑なミッション計画の要件にはArdupilotがお勧めです。
フライトコントローラーの詳細については、以下を参照してください:
ドローンのフライトコントローラー: 原理と動作
長距離システムの構築
信頼性の高い長距離システムを構築するには、慎重なコンポーネントの選択と統合が必要です。
コンポーネント選択チェックリスト
長距離システムを構築する際は、このチェックリストを使用してください:
- フレーム: 7インチ以上、効率重視の設計
- モーター: 低KV (6Sの場合1300-1700KV)、効率重視
- プロペラ: ピッチが高く、効率重視の設計
- フライトコントローラー: 気圧計と堅牢なGNSSサポートを備えたF7/H7
- ESC: 40A以上で優れた熱管理機能を備えたもの
- 制御リンク: ダイバーシティを備えた長距離システム (ExpressLRS/Crossfire)
- ビデオシステム: 指向性機能を備えたプライマリとバックアップのシステム
- GNSSモジュール: 複数のコンステレーションをサポートする高品質モジュール
- バッテリー: 最大レンジにはLi-ion、バランスの取れたパフォーマンスにはLiPo
- アンテナ: 制御とビデオの両方に指向性オプション
- 電源管理: 可能な限りフィルタリングされた冗長電源
システム統合のベストプラクティス
適切な統合はコンポーネントの選択と同じくらい重要です:
| 統合の側面 | よくある間違い | ベストプラクティス | レンジへの影響 |
|---|---|---|---|
| 干渉管理 | VTXを制御受信機の近くに配置、シールドされていない配線 | RFコンポーネントの物理的分離、シールドされた信号線、フィルタリングされた電源 | 制御リンクの信頼性が20〜30%向上 |
| アンテナ配置 | カーボンファイバーの下のGNSSアンテナ、フレームに触れるアンテナ、偏波の不一致 | 上部に明確な視界を持つGNSSアンテナ、導電性材料から離れた制御アンテナ、適切な偏波アライメント | 信号品質が30〜50%向上 |
| 電力分配 | 敏感なコンポーネントへのフィルタリングされていない電力、単一の電力経路 | FCと受信機用のフィルタリングされた電力、冗長電力経路、電圧モニタリング | ノイズの低減とより信頼性の高い動作 |
| 重量とバランス | 過剰な重量、不適切なCG、不要なコンポーネント | 最適化されたコンポーネントの選択、前進飛行用のバランスの取れたCG、ミニマリストアプローチ | 飛行効率が10〜20%向上 |
システム統合に注意を払うことで、同じ部品を使用していても、でたらめに組み立てられたコンポーネントと比較して、有効範囲を2倍にすることができると私は考えています。
長距離ビルドの例
実績のある長距離ビルド用のコンポーネントリストは次のとおりです:
- フレーム: 7インチ iFlight XL7 V5またはTBS Source One V5
- モーター: 2306-1750KVまたは2507-1500KV
- プロペラ: 7x4.5または7x5の効率重視
- フライトコントローラー: iNav搭載のMatek H743-WING
- ESC: BlHeli_32を搭載した45A 4-in-1
- 制御リンク: ダイバーシティ受信機付きExpressLRS 900MHz
- ビデオシステム: アナログバックアップ付きDJI O3 Air Unit
- GNSS: Matek M10Q-5883マルチコンステレーションモジュール
- バッテリー: 6S 5000-6000mAh Li-ionパック
- アンテナ: 地上用パッチ/指向性、機体用全方向性
このセットアップは、優れた飛行特性を維持しながら、安定して10km以上の範囲と信頼性の高い帰還能力を提供してきました。
飛行計画と準備
適切な計画は、安全で成功する長距離運用に不可欠です。
飛行前計画プロセス
飛行計画には、この体系的なアプローチに従ってください:
- ルート計画
- エリアの衛星画像を調査する
- 潜在的な危険と障害物を特定する
- 主要ルートと代替ルートを計画する
- 緊急着陸ゾーンを設定する
- 地形クリアランスのための標高プロファイルを確認する
- 規制遵守
- 空域制限を確認する
- 必要な許可を取得する
- EVLOSアプローチを使用する場合は、オブザーバーの位置を計画する
- 必要に応じて関連当局に通知する
- 一時的な飛行制限を確認する
- 天候評価
- さまざまな高度での風の状態を確認する
- 視界と雲量を確認する
- 飛行経路に対する太陽の位置を考慮する
- 降水予報を監視する
- 暑い天候ではサーマル条件を確認する
- コミュニケーション計画
- オブザーバーのコミュニケーションプロトコルを確立する
- 信頼性の高いコミュニケーション方法を確保する
- 標準的な用語と手順を定義する
- 通信障害に備える
- 緊急時の手順についてすべてのチームメンバーに説明する
私は、Windy、Meteoswiss、UAV Forecastの組み合わせと、カスタムチェックリストを使用して、すべての長距離ミッションで徹底的な飛行計画を立てています。
ミッション計画ソフトウェア
いくつかのソフトウェアオプションが飛行計画を支援できます:
- QGroundControl: Ardupilot/PX4用の包括的なミッション計画
- Mission Planner: Ardupilotシステム用の詳細な計画
- iNav Configurator: iNavベースのシステム用の基本的な計画
- Litchi: DJIプラットフォーム用のユーザーフレンドリーな計画
- Google Earth Pro: ルートの可視化と標高分析に最適
複雑なミッションの場合、通常はQGroundControlまたはMission Plannerで計画し、ウェイポイントをフライトコントローラーにエクスポートします。
飛行前チェックリスト
この包括的なチェックリストは、飛行前の重要な検証をカバーしています:
システムチェック
- [ ] すべてのファームウェアが最新の安定版にアップデートされている
- [ ] バッテリーが充電され、バランスが取れている(すぐに飛行しない場合は保管充電)
- [ ] すべての接続が安全で確認済み
- [ ] プロペラを点検し、適切に締め付けられている
- [ ] 制御面が正しい方向に動いている
- [ ] フェイルセーフがテストされ、検証済み
- [ ] RTH機能が最近テストされている
- [ ] 複数の衛星群で14個以上の衛星を使用したGNSSロック
- [ ] ホームポイントが設定され、検証済み
- [ ] コンパスがキャリブレーションされ、検証済み
- [ ] テレメトリーが機能し、正しいデータを表示している
- [ ] ビデオ伝送が明瞭で安定している
- [ ] 制御リンクのRSSIが強く安定している
- [ ] メモリーカードがフォーマットされ、インストールされている(機体で録画する場合)
環境チェック
- [ ] 気象条件が許容範囲内である
- [ ] 飛行高度での風速と風向がチェックされている
- [ ] 接近する気象システムがない
- [ ] オブザーバーにとって十分な視界がある
- [ ] 太陽の位置が確認され、直接太陽に向かって飛行することを避ける
- [ ] 離陸エリアがクリアで安定している
- [ ] 回収ゾーンが特定されている
- [ ] 予期しない障害物や危険がない
- [ ] 近くに有人航空機がいない
- [ ] 直近のエリアに人や車両がいない
運用チェック
- [ ] フライトプランが確認され、ロードされている
- [ ] オブザーバーが配置され、通信がテストされている
- [ ] 必要に応じて当局に通知済み
- [ ] 緊急手順がチームで確認されている
- [ ] バッテリー容量が30%の予備を含めて十分である
- [ ] 帰路に障害物がないことが確認されている
- [ ] 高度計画が地形と障害物を考慮している
- [ ] 通信機器が充電され、機能している
- [ ] 該当する場合、バックアップ機器の準備ができている
- [ ] 時間的制約が考慮されている(日光、バッテリー寿命など)
私はこのチェックリストをラミネートし、長距離フライトの前に毎回物理的にチェックしています。この規律により、長年にわたって数多くの潜在的な問題を防ぐことができました。
長距離飛行テクニック
長距離飛行を成功させるには、典型的なFPV飛行とは異なる特定のテクニックが必要です。
効率的な飛行テクニック
飛行距離を最大化するには、効率的な飛行が必要です:
- 巡航スロットル管理
- 「最適な」スロットル位置を見つける(通常は30〜40%)
- 不必要な上昇を避けるために一定の高度を維持する
- アグレッシブな機動ではなく、緩やかな旋回を使用する
- 急激なスロットル変更を避ける
- 風の管理
- 風向を考慮してルートを計画する
- 可能な場合は、外向きの脚で風に向かって飛ぶ
- 有利な風の状態を見つけるために高高度を使用する
- 飛行距離計画のために対地速度と対気速度を計算する
- 高度最適化
- 一般に、高高度は信号伝搬を改善する
- 高度とバッテリー効率のバランスを取る
- 地形と障害物を考慮する
- 風の利点のために高度を戦略的に使用する
- バッテリー管理
- パーセンテージではなく、負荷時の電圧を監視する
- バッテリーの電圧サグ特性を理解する
- 性能に対する温度の影響を考慮する
- 控えめな折り返し地点を計画する(バッテリー残量60%)
慎重なテストにより、私の7インチ長距離ビルドは35%のスロットルで最大の効率を達成し、穏やかな条件で6S 6000mAhリチウムイオンパックで約25kmの合計飛行距離を実現することがわかりました。
ナビゲーションテクニック
状況認識を維持することが重要です:
- 視覚的な参照
- 特徴的なランドマークを特定して使用する
- 方向を確認するために太陽の位置に注意する
- 道路、川、その他の線状の特徴をガイドとして使用する
- 地形のメンタルマップを作成する
- テレメトリーの活用
- ホームまでの距離と方向を監視する
- 高度を一貫して追跡する
- 方向を確認するために人工地平線を使用する
- GNSSステータスを定期的に確認する
- 方向管理
- さまざまな方向で飛行する練習をする
- 適切な場合はヘディングホールドモードを使用する
- 遠距離での制御の反転を理解する
- ホームに対する機体の方向を認識し続ける
- 緊急手順
- いつ手動でRTHをトリガーするかを知る
- 自動化システムからいつ引き継ぐかを理解する
- 方向喪失からの回復を練習する
- ビデオまたは制御リンクの劣化に対するプロトコルを開発する
私は常に、ルートの「メンタルなパンくずの軌跡」を維持し、ナビゲーションシステムが故障した場合でも自宅に導いてくれる特徴的な機能に注目しています。
コミュニケーションプロトコル
オブザーバーと協力する際には、明確なコミュニケーションが不可欠です:
- 標準用語
- 明確で一貫した用語を使用する
- 重要な情報の理解を確認する
- 一般的な状況のための省略形を開発する
- あいまいな指示を避ける
- オブザーバーの調整
- オブザーバーを戦略的に配置する
- オブザーバー間の明確な引き継ぎ手順を確立する
- すべてのオブザーバーが航空機の能力を理解していることを確認する
- 重要なフライトの前にコミュニケーションを練習する
- 緊急時の通信
- さまざまなシナリオに対する明確なプロトコルを開発する
- 優先通信ルールを確立する
- すべてのチームメンバーが緊急手順を理解していることを確認する
- 緊急シナリオを練習する
オブザーバーと使用している簡単で効果的なプロトコルには、「Visual confirmed」(オブザーバーが目視で確認)、「Transition request」(次のオブザーバーへの引き継ぎの準備)、「Command accepted」(指示の受領確認)などの標準的な呼び出しが含まれます。
リスク管理と緊急時の手順
長距離飛行には、体系的に管理しなければならない固有のリスクが伴います。
リスク評価フレームワーク
このフレームワークを使用して、リスクを評価および軽減します:
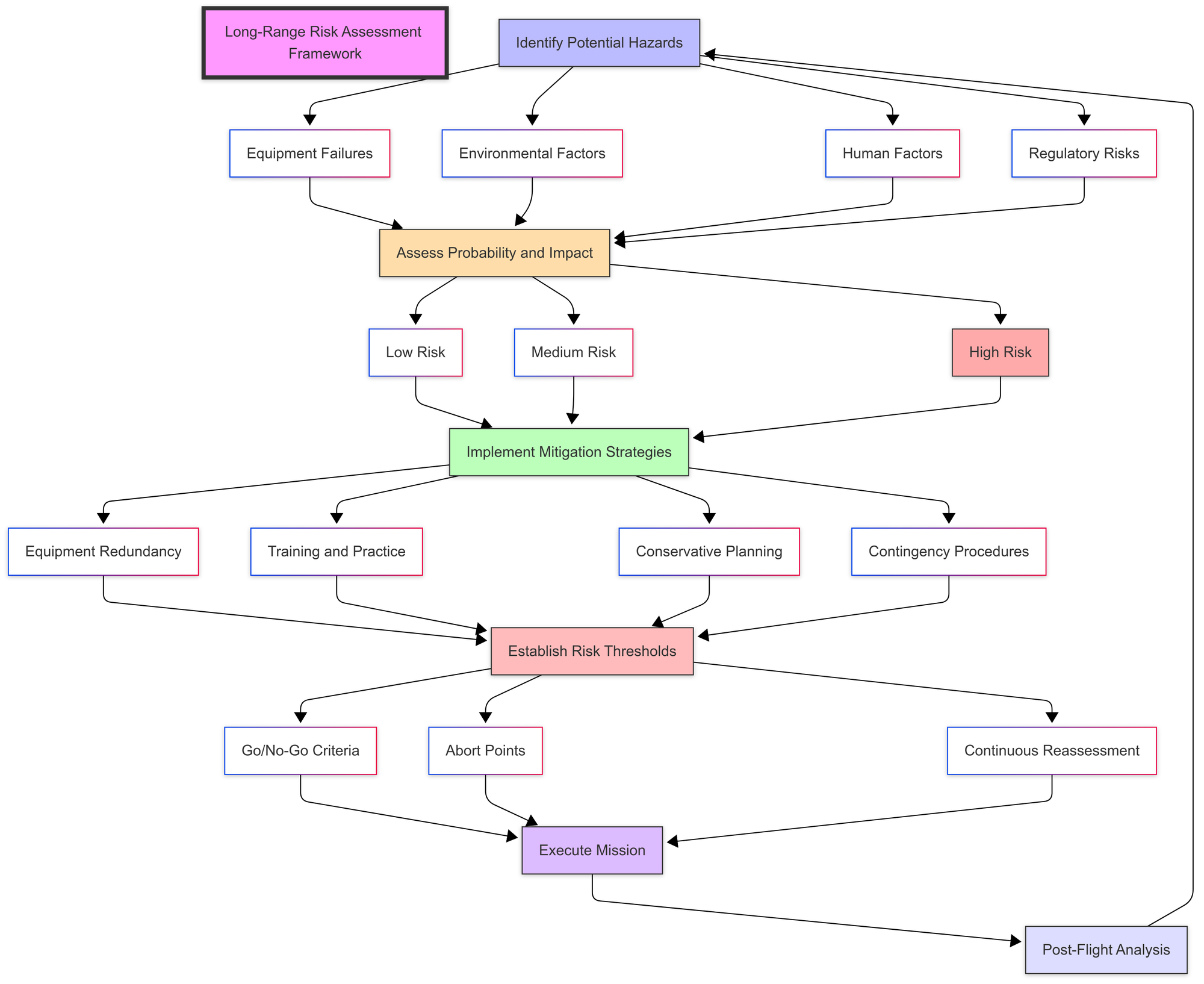
| リスクカテゴリー | 例 | 軽減戦略 | Go/No-Go 基準 |
|---|---|---|---|
| 機器の故障 | 制御リンクの喪失、ビデオシステムの故障、バッテリーの故障、GPS の喪失 | 冗長システム、飛行前テスト、控えめな範囲制限 | 未テストの機器での飛行禁止、最低 14 機のサテライトロック、フェイルセーフの完全なテスト |
| 環境要因 | 強風、視界不良、降水、地形障害物 | 天気予報、ルート計画、高度管理 | 風速 25km/h 超での飛行禁止、降水時の飛行禁止、視界 3km 未満での飛行禁止 |
| 人的要因 | パイロットの疲労、オブザーバーのエラー、コミュニケーションの崩壊 | チームトレーニング、明確なプロトコル、休息要件 | 疲労時の飛行禁止、ブリーフを受けていないオブザーバーとの飛行禁止、通信チェックなしでの飛行禁止 |
| 規制上のリスク | 空域違反、許可要件、オブザーバーのコンプライアンス | 飛行前の調査、文書化、当局への通知 | 制限空域内での飛行禁止、必要な許可なしでの飛行禁止、適切な文書なしでの飛行禁止 |
私は複雑な長距離ミッションのための正式なリスクアセスメントを文書化しており、これは明白でないリスクと適切な軽減策を特定するのに非常に役立つことが証明されています。
一般的な故障モードと対応
これらの一般的な問題に備えましょう:
制御リンクの故障
- 予防: 多様性システム、レンジテスト、アンテナの位置決め
- 対応: RTH の作動を許可し、必要でない限り手動オーバーライドを避ける
- 回復: 適切な RTH 実行のためにテレメトリーを監視する
ビデオリンクの故障
- 予防: デュアルシステム、指向性アンテナ、電力管理
- 対応: 直線飛行を維持し、バックアップビデオシステムに切り替える
- 回復: 方向確認のためにテレメトリーデータを使用し、手動 RTH を検討する
GNSS の故障
- 予防: マルチコンステレーションシステム、干渉軽減
- 対応: 姿勢モードに切り替え、方向を維持し、帰還を開始する
- 回復: ナビゲーションのために視覚的な参照とテレメトリーを使用する
バッテリーの故障
- 予防: 控えめな計画、温度管理
- 対応: 即時 RTH、消費電力の削減
- 回復: 必要に応じて緊急着陸ゾーンを特定する
方向感覚の喪失
- 予防: 視覚的な参照を維持し、ヘディングホールドモードを使用する
- 対応: 機体を水平にし、方向確認のためにテレメトリーを確認する
- 回復: 方向感覚の喪失が続く場合は RTH を使用する
各故障モードについて、長距離飛行を試みる前に、安全な距離で定期的に対応手順を練習しています。
緊急着陸手順
RTH が不可能な場合:
- サイト選択基準
- 人や構造物のない開けた場所
- 回収が可能な場所
- 危険 (水、電線など) が最小限の場所
- FPV フィードで視認可能な場所
- 制御された降下テクニック
- 前進の勢いを維持する
- 高度を徐々に下げる
- 可能な場合は向かい風でアプローチする
- 地面に接触する前に動力を切る
- 回収計画
- テレメトリーで着陸地点をマークする
- ナビゲーションに衛星画像を使用する
- 不動産へのアクセスの問題を考慮する
- 適切な回収ツールを持参する
私は常に離陸前に、計画したルートに沿って少なくとも 3 つの潜在的な緊急着陸ゾーンを特定しています。
高度な長距離機能
経験豊富なパイロットにとって、これらの高度な機能は長距離運用を強化できます。
ウェイポイントミッション
自動化されたウェイポイントミッションは精度と一貫性を提供します:
- ミッション計画ソフトウェア
- QGroundControl
- Mission Planner
- iNav Configurator
- DJI プラットフォーム用の DJI/Litchi
- ウェイポイントの種類
- 位置ウェイポイント (緯度/経度/高度)
- アクションウェイポイント (カメラトリガーなど)
- 条件付きウェイポイント (センサー/時間に基づく)
- リターンウェイポイント
- ミッションパラメーター
- ウェイポイント間の速度
- ウェイポイントでの滞在時間
- 高度変更
- ヘディング要件
- 安全性の考慮事項
- フェイルセーフ統合
- バッテリー監視
- ジオフェンシング
- 手動オーバーライド機能
私は複雑なルートや正確な位置決めが必要な場合にウェイポイントミッションを使用しますが、常に手動制御機能を維持し、ミッションを積極的に監視します。
地形追従
高度なシステムは、地形上の一定の高度を維持できます:
- 実装方法
- レーダー/ライダー高度計
- 地形データベースを使用した気圧
- 地図に基づいて事前にプログラムされた高度変更
- 構成パラメーター
- 地形上の最小安全高度
- 前方注視距離
- 地形変化への応答率
- 最大上昇/下降率
- 制限事項
- センサーの精度と信頼性
- 地形データベースの解像度
- 処理要件
- 必要な安全マージン
地形追従には慎重なテストと控えめな安全マージンが必要ですが、それ以外では非常に困難な山岳地帯でのフライトを可能にできます。
長距離 FPV の規律
長距離飛行への特殊なアプローチ:
マウンテンサーフィン
- 地形の輪郭に近い範囲で追従する
- 優れた深度知覚と反応時間が必要
- 通常、高性能のビルドを使用
- エリアに関する深い知識が必要
クロスカントリー遠征
- バッテリー交換を伴う複数段階のフライト
- 地上サポートチームが必要
- 最大距離の達成に重点を置く
- 多くの場合、固定翼機またはVTOLプラットフォームを使用
ロングレンジフリースタイル
- 距離とアクロバット的な動きを組み合わせる
- 純粋なロングレンジよりも高出力のシステムが必要
- 効率とパフォーマンスのバランスを取る
- 多くの場合、レンジと機敏性のバランスが取れた6インチビルドを使用
空撮ミッション
- 遠距離で特定の被写体を捉える
- 安定性とカメラの品質を重視
- 多くの場合、より大きく安定したプラットフォームを使用
- ジンバルシステムを組み込むことがある
私は、マウンテンサーフィンが特に価値あるものだと感じていますが、遠距離で試みる前に、より近い範囲で十分な練習が必要です。
機器とアクセサリー
専門の機器がロングレンジの能力を高めます。
グランドステーションのセットアップ
適切なグランドステーションは、ロングレンジ体験を大幅に向上させます:
- アンテナシステム
- 指向性アンテナ(パッチ、ヘリカル、ヤギ)
- アンテナトラッカー(手動または自動)
- ダイバーシティレシーバー
- アンプ(法的に許可されている場合)
- モニタリング機器
- テレメトリ用のセカンダリ画面
- スペクトラムアナライザー
- バッテリー電圧モニター
- 信号強度インジケーター
- サポート機器
- 気象モニタリングツール
- オブザーバー用の通信システム
- バックアップ電源
- 画面用のサンシェード
- 快適性への配慮
- 長時間セッション用の座席
- 日光/天候からの保護
- 水分と栄養
- 適切な服装

私のポータブルグランドステーションには、折りたたみ椅子、小さなテーブル、パッチアンテナとオムニアンテナを備えたダイバーシティレシーバー、テレメトリディスプレイ、オブザーバー用の通信ヘッドセットが含まれています。このセットアップは1つのバックパックに収まりますが、効果的なロングレンジ運用に必要なすべての基本機能を提供します。
アンテナトラッカー
アンテナトラッカーは信号品質を大幅に改善できます:
- 手動トラッカー
- オペレーターがアンテナを物理的に狙う必要がある
- シンプルで信頼性が高い
- 低コスト
- 初心者に適している
- 自動トラッカー
- テレメトリデータを使用してアンテナを自動的に狙う
- オペレーターの注意をフライトに集中させられる
- より複雑なセットアップ
- 初期投資が高い
- DIYオプション
- Arduinoベースのトラッカー
- 3Dプリントメカニズム
- テレメトリ駆動のポジショニング
- 経験豊富なビルダーにとってコスト効率が良い

私は最初、三脚と指向性パッチアンテナを使用したシンプルな手動トラッカーから始めましたが、静的なセットアップと比較して有効範囲が約40%向上しました。本格的なロングレンジミッションでは、フライト全体を通してアンテナを完璧に位置合わせする自動トラッカーを使用しています。
アンテナの詳細については、以下を参照してください:
ポータブル電源ソリューション
長時間のセッションには信頼性の高い電源が必要です:
- バッテリーオプション
- LiPoパワーステーション
- ソーラー充電器
- 適切な出力を備えたパワーバンク
- 車載パワーインバーター
- 電力管理
- 重要なシステムを優先する
- 消費量を監視する
- バックアップオプションを用意する
- 実行時間の要件を考慮する

終日のセッションでは、大容量のLiPoバッテリーと折りたたみ式ソーラーパネルを組み合わせて使用しています。これにより、グランドステーションに十分な電力を供給しながら、リモートロケーションでも携帯性を維持できます。
法的および倫理的なベストプラクティス
責任あるロングレンジフライトは、技術的な考慮事項を超えて拡張されます。
書類と許可
適切な書類を維持します:
- 必要な書類
- ドローンの登録情報
- パイロットの認定/ライセンス
- 保険の書類
- 飛行ログとメンテナンス記録
- リスクアセスメントと飛行計画
- 許可手続き
- 離着陸のための土地所有者の許可
- 必要に応じた空域の許可
- オブザーバーとの合意と説明
- 関連当局への通知
- 保護区域のための特別許可
私は、各飛行場所に関連するすべての書類、許可、連絡先情報を専用のフォルダに保管しています。これは、当局やその他の利害関係者から質問があった場合に非常に貴重であることが証明されています。
環境への配慮
自然と野生生物への影響を最小限に抑えます:
- 野生生物の保護
- その地域の敏感な種を調査する
- 野生生物から適切な距離を保つ
- 営巣地域と繁殖期を避ける
- 動物の反応を監視し、それに応じて調整する
- 騒音管理
- 効率的なプロペラを使用して騒音を低減する
- 敏感な地域では高高度を維持する
- 運用時間帯を考慮する
- 特定の地域での飛行時間を制限する
- 物理的影響
- 離着陸地点に痕跡を残さない
- 環境への影響を最小限に抑える回収計画を立てる
- 敏感な地域への着陸の代替案を検討する
- 土壌、植物、生息地の攪乱を避ける
かつて、計画していた山岳飛行が保護されたワシの営巣地の近くを通過することが判明した後、中止したことがあります。残念ではありましたが、野生生物と保護区域を尊重することは、責任あるパイロットにとって譲れないことです。
地域社会との関係
より広いコミュニティとの良好な関係を維持します:
- 一般の認識管理
- 自分の活動を説明する準備をする
- 安全対策と予防措置を実証する
- 論争の的となる映像ではなく、美しい映像を共有する
- 趣味の大使として行動する
- コラボレーションの機会
- 地元のクラブや組織と協力する
- 地域社会の教育に参加する
- 捜索救助や自然保護活動を支援する
- 他のパイロットと知識を共有する
- 対立の回避
- 人口密集地域から離れて飛行する
- プライバシーの懸念を尊重する
- 質問や懸念に敬意を持って対処する
- フィードバックに基づいて計画を修正する意思を持つ
土地所有者、地方自治体、地域社会との良好な関係を築くことで、そうでなければアクセスできない素晴らしい飛行の機会が開かれました。安全プロトコルを説明し、空撮の美しさを共有するために時間を割くことで、懐疑的な人々を支持者に変えることができます。
ロングレンジ飛行を成功させるためのプロのヒント
長年にわたってロングレンジ飛行の限界に挑戦してきた私は、以下の高度な洞察を得ています:
天候の最適化
気象パターンを理解することが重要です:
- サーマル活動
- 朝と夕方は通常より穏やかな条件が得られる
- 目に見える積雲はアクティブなサーマルを示す
- 暗い地表の特徴はより強いサーマルを作り出す
- 一貫した風向はサーマルパターンの組織化を示唆する
- 風の層
- 風は高度によって向きと速度が変化することが多い
- さまざまな高度で風を示す気象予報ツールを使用する
- 高度を変えて好ましい風の状態を見つける
- 地形近くの風の勾配効果を考慮する
- 気圧システム
- 高気圧システムは通常より良好な飛行条件をもたらす
- 気圧の上昇は条件の改善を示すことが多い
- 気圧の下降は接近する気象システムを示唆する可能性がある
- 安定した気圧は一貫した条件を示唆する
かつて、帰路で追い風をつかむために250mの高度まで上昇することで、5kmの追加レンジを得たことがあります。天候条件を賢明に利用することで、実効バッテリー容量を2倍にすることができました。
レンジ最適化テクニック
有効範囲を最大化します:
- 空力改善
- 突起物を最小限に抑えたクリーンなビルド
- 適切に張力を与えたバッテリーストラップ
- 流線型のアンテナ取り付け
- 露出した配線を最小限に抑える
- 軽量化戦略
- より軽いバッテリーオプション(LiPoよりもLi-ion)
- 最小限のハードウェア
- 適切な場所での炭素繊維部品
- 各コンポーネントの必要性を評価する
- パワーシステムの効率
- 巡航効率のためのモーターとプロペラのマッチング
- ESC設定の最適化
- アイドルスロットルを最小限に抑える
- バッテリー負荷の最適化
- 信号の最適化
- 干渉を避けるための周波数調整
- アンテナの偏波整合
- 地上局の高度
- 信号経路の障害物を最小限に抑える
体系的なテストと最適化により、主要コンポーネントを変更することなく、既存のシステムを慎重に調整・最適化するだけで、私の主要ロングレンジビルドのレンジを40%以上向上させました。
メンタルな準備
ロングレンジ飛行の心理的側面は見過ごされがちです:
- ストレス管理
- 段階的な距離の増加を練習する
- 自分のシステムに自信を持つ
- さまざまなシナリオに対して精神的に準備する
- 快適レベルに基づいて中止するタイミングを知る
- 集中テクニック
- 重要な飛行中は気が散るものを排除する
- 状況認識を維持する
- 計器のスキャンパターンを開発する
- 情報の優先順位付けを練習する
- 意思決定
- 飛行前にGo/No-Goの基準を確立する
- ミッション中の中止トリガーを定義する
- 安全上の決定から感情を取り除く
- 自分の準備とシステムを信頼する
メンタルな準備は技術的な準備と同じくらい重要だと私は考えています。機体が数キロ離れているときに冷静さを保ち、合理的な決定を下す能力は、段階的な練習によって身につけなければならないスキルです。
FAQ: ロングレンジ飛行に関するよくある質問
ロングレンジ飛行は合法ですか?
合法性は、あなたの場所と操作方法に完全に依存します。ほとんどの国では、特別な許可なしに視界外(BVLOS)での運用を禁止しています。ただし、適切なプロトコルを使用して視覚オブザーバーがEVLOS運用を維持する場合、多くの管轄区域で合法となる可能性があります。常に自分の場所の具体的な規制を調査し、適切な許可を取得することを検討し、制限された空域では決して飛行しないでください。最も責任ある方法は、計画した運用の合法性が不明な場合、地元の航空当局に直接連絡することです。
国ごとの規制の詳細については、以下の包括的なガイドを参照してください:
現在の技術で可能な最大飛行距離は?
最適な条件と機器があれば、900MHzの制御システム、高品質のビデオリンク、効率的な機体を使用して、ホビーグレードのシステムで30km以上の飛行が可能です。商用システムではさらに大幅に拡張できます。しかし、責任ある運用のための実用的な限界は、機器の技術的限界ではなく、法令遵守、安全性の確保、リスク管理の能力によって決まります。最大限の理論的な飛行距離ではなく、適切な冗長性を備えた信頼性の高いシステムの構築に注力しましょう。
長距離飛行には特別なライセンスが必要ですか?
これは国によって異なります。多くの法域では、標準的なドローン登録と基本的なパイロット認証でVLOS運用には十分ですが、BVLOS運用には追加のライセンスや許可が必要になる場合があります。特に高出力や非標準周波数のシステムでは、一部の国で無線オペレーターライセンスが必要とされています。あなたの場所と予定されている運用に特有の要件を調査してください。不明な点がある場合は、国の航空当局にガイダンスを求めてください。
長距離飛行に最適な無線システムは何ですか?
現在、長距離運用のための主要な制御リンクシステムは、ExpressLRSとTBS Crossfireです。ExpressLRSは、そのオープンソースの性質、優れたパフォーマンス、活発な開発コミュニティにより大きな人気を獲得しています。最大飛行距離のためには、障害物の貫通と信号伝搬特性に優れているため、900MHzシステム(または法的に許可されている場合は433MHz)が2.4GHzシステムよりも大きな利点を提供します。理想的なシステムは、特定の要件、予算、および場所の規制環境に依存します。
制御システムの詳細については、包括的なガイドをご覧ください:
フライアウェイを防ぐにはどうすればよいですか?
フライアウェイを防ぐには、複数の保護層が必要です:
- 受信機とフライトコントローラーの両方で適切に設定およびテストされたフェイルセーフ
- バッテリー電圧と信号損失に対する控えめなRTHトリガーポイント
- 定期的なコンパスのキャリブレーションと検証
- 離陸前の適切なGPS衛星のロック
- すべてのシステムの徹底的な飛行前テスト
- 十分なマージンを持つ控えめな飛行計画
- すべてのコンポーネントの定期的なメンテナンスと点検
近距離で徹底的にフェイルセーフとRTHシステムをテストせずに、長距離飛行を試みないでください。
ビデオの飛行距離を延ばすにはどうすればよいですか?
ビデオの飛行距離を最大化するには:
- 地上局に指向性アンテナ(パッチ、ヘリカル、ヤギ)を使用する
- アンテナトラッカー(手動または自動)を実装する
- 地上局のアンテナを見通しの良い位置に配置する
- 複数のアンテナタイプを備えたダイバーシティレシーバーを使用する
- 環境に適した周波数帯を選択する
- デュアルビデオシステム(デジタルプライマリとアナログバックアップ)の検討
- 機体上のアンテナ配置を最適化する
- 高品質、低損失のケーブルとコネクタを使用する
最大飛行距離のために、多くの経験豊富なパイロットは、デジタルの明瞭さとアナログの緩やかな劣化を活用するために、デジタルとアナログのシステムを組み合わせて使用しています。
FPVシステムの詳細については、包括的なガイドをご覧ください:
長距離飛行に最適なバッテリーは何ですか?
最大飛行距離のためには、Li-ionバッテリーが最高のエネルギー密度を提供し、同等のLiPoバッテリーよりも大幅に長い飛行時間を実現します。Samsung 40T、Sony VTC6、Molicel P42Aなどの21700フォーマットのセルは、長距離ビルドに優れたパフォーマンスを提供します。ただし、Li-ionバッテリーは放電率が低いため、効率的な巡航には適していますが、アグレッシブな飛行にはあまり適していません。パフォーマンスと飛行距離のバランスを取るには、Li-ion/LiPoハイブリッドパックまたは高品質のLiHVバッテリーを検討してください。常に、電源システムがバッテリーの選択に適切にサイズ設定されていることを確認してください。
バッテリー選択の詳細については、以下を参照してください:
ドローンバッテリーの種類と化学の概要
ドローンの最大飛行距離を計算するにはどうすればよいですか?
理論的な飛行距離は、以下を使用して推定できます:
- 巡航スロットルでのバッテリー容量と測定された電流消費
- 制御リンクの仕様とテスト済みのパフォーマンス
- ビデオシステムの飛行距離制限
- あなたの地域の規制上の制限
ただし、実用的な飛行距離は、ほとんどの場合、単純なバッテリー容量以外の要因によって制限されます。これには、風の状態、安全マージン、法的要件、リスク管理の考慮事項などが含まれます。控えめなアプローチは、バッテリー容量の60%を往路に使用し、40%を復路と不測の事態に残すことです。
ビデオ信号を失った場合はどうすればよいですか?
ビデオ信号を失った場合:
- まっすぐで水平な飛行を維持する—突然の動きは避ける
- 方向と位置情報についてテレメトリーデータを確認する
- 利用可能な場合はバックアップビデオシステムに切り替える
- 適切な場合は、信号伝搬を改善するために高度を上げる
- 方向感覚の喪失が続く場合は、手動でRTHを開始する
- テレメトリーで復帰の進行状況を監視する
- 必要に応じてアティチュードモードに切り替える準備をする
適切な対応のための筋肉の記憶を養うために、近距離でこのシナリオを練習してください。
専門的な地上局機器は必要ですか?
基本的な長距離飛行は標準的な機器で実現できますが、専門的な地上局コンポーネントは信頼性と有効飛行距離を大幅に向上させます:
- 指向性アンテナは信号強度を劇的に増加させる
- ダイバーシティレシーバーは信号の信頼性を向上させる
- アンテナトラッカーは飛行全体で最適な信号を維持する
- テレメトリ用のセカンダリモニターは重要な情報を提供する
- 適切な座席と天候保護により、より良い集中力が得られる
基本的な機器から始めて、飛行距離と経験を伸ばすにつれて徐々にアップグレードしていきましょう。
結論
長距離飛行は、FPVホビーにおける技術的達成の頂点であると同時に、最大の責任でもあります。目視範囲を超えて航空機を操縦する能力は、探検、映画撮影、純粋な飛行の楽しみのための信じられないような可能性を開きますが、同時に、最高レベルの準備、スキル、倫理的考慮も要求します。
緊張感のある1kmの飛行から自信のある数kmの遠征への私の旅を通して、私は成功する長距離飛行が3つの同等に重要な基盤の上に築かれていることを学びました:
- 技術的卓越性: 適切な冗長性を備えた信頼性の高いシステムを徹底的にテストし、維持する
- 運用上の規律: 綿密な計画、慎重な意思決定、包括的なリスク管理
- 倫理的責任: 法令遵守、環境への配慮、地域社会との良好な関係
長距離飛行で最もやりがいのある側面は、単に距離の目標に到達することではありません。その追求に必要とされるホビーのあらゆる側面を総合的に習得することです。長距離飛行を慎重に進歩させることで培われたスキルは、ドローン操作のあらゆる側面であなたの能力を向上させます。
長距離飛行を始める人には、体系的なアプローチをお勧めします。徹底的な調査から始め、信頼性の高いシステムを構築し、段階的な距離で広範にテストを行い、常に安全性と責任を距離の達成よりも優先してください。真の達成は、どれだけ遠くまで飛ぶかではなく、いかに安全に、合法的に、責任を持って操作を行うかにあります。
長距離飛行の将来は、技術の継続的な改善と、認可されたBVLOS操作のためのより正式な道筋を提供する可能性のある規制の枠組みの進化と並行して進むでしょう。現在の操作において責任と安全性を実証することで、コミュニティとしてその未来をポジティブに形作ることができます。
山脈を探索する、景観のユニークな視点を捉える、または単に長時間のフライトの純粋な自由を楽しむ、長距離飛行は他のホビーの側面では決して再現できない体験を提供します。適切なアプローチをとれば、安全に、合法的に、責任を持って行うことができ、準備と練習を積む意欲のある人々に可能性の世界を開きます。
参考文献とさらなる読み物
- 世界のドローン規制
- スイスのドローン規制
- ドローンのRCエコシステム
- RCシステムアンテナの概要
- デジタルFPVとアナログFPVの比較
- FPVアンテナの概要
- GNSS技術: 安全なナビゲーションのための包括的ガイド
- ドローンのフレーム: サイズ、素材、選択
- ドローンのバッテリータイプと化学の概要
外部リソース
- UAV Forecast - ドローンパイロットのための天気とフライト条件の予報
- QGroundControl - 包括的な地上管制局ソフトウェア
- Mission Planner - Ardupilotのフライト計画と設定
- iNav Configurator - iNavファームウェアの設定ツール
- ExpressLRSプロジェクト - オープンソースの長距離ラジオコントロールシステム
- Joshua BardwellのYouTubeチャンネル - 詳細なチュートリアルと情報


