Teoria de Voo de Drone: Física e Princípios de Voo Multirotor
Entender os princípios teóricos por trás do voo de drones é essencial para pilotos que desejam dominar sua arte, solucionar problemas e otimizar o desempenho. Após anos estudando a dinâmica de voo e construindo inúmeros drones, descobri que uma compreensão sólida da teoria de voo pode transformar um bom piloto em um piloto excepcional. Este guia abrangente irá orientá-lo através da física e dos princípios que tornam possível o voo de multirotores.
Introdução à Teoria de Voo de Multirotores
Os multirotores representam uma categoria única de aeronaves que diferem fundamentalmente dos aviões tradicionais de asa fixa e helicópteros. Sua capacidade de pairar, manobrar com precisão e fazer a transição entre vários modos de voo os torna versáteis, mas também introduz uma dinâmica de voo complexa.
A Diferença Fundamental
Ao contrário das aeronaves de asa fixa que geram sustentação através de aerofólios se movendo pelo ar, ou helicópteros tradicionais que usam sistemas mecânicos complexos como pratos oscilantes para controlar um rotor principal:
- Os multirotores usam múltiplas hélices de passo fixo
- Eles alcançam o controle através do empuxo diferencial entre os motores
- Eles não têm a complexidade mecânica dos helicópteros, mas requerem sistemas de controle eletrônico sofisticados
Essa abordagem cria um sistema de voo mecanicamente mais simples, mas eletrônica e matematicamente mais complexo.
Física Básica do Voo de Multirotores
As Quatro Forças
Como todas as aeronaves, os multirotores estão sujeitos a quatro forças principais:
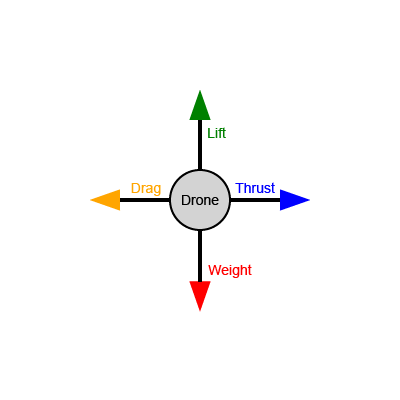
- Sustentação: A força ascendente gerada pelas hélices
- Diretamente proporcional ao quadrado do RPM da hélice
- Afetada pelo design da hélice, densidade do ar e potência do motor
- Pode ser vetorizada (direcionada) inclinando o drone
- Peso: A força descendente constante devido à gravidade
- Igual à massa do drone multiplicada pela aceleração gravitacional
- Atua através do centro de gravidade
- Permanece constante independentemente da orientação do drone
- Arrasto: A força de resistência que se opõe ao movimento através do ar
- Aumenta com o quadrado da velocidade
- Afetado pelo perfil aerodinâmico do drone
- Atua na direção oposta ao movimento
- Empuxo: A força que impulsiona o drone horizontalmente
- Gerado redirecionando a força da hélice através da inclinação
- Permite movimento para frente, para trás e lateral
- Deve superar o arrasto para manter o movimento horizontal
Consideração adicional:
- Inércia: Embora não seja uma das quatro forças fundamentais, afeta a dinâmica do drone
- Determinada pela massa do drone e sua distribuição
- Afeta a rapidez com que o drone pode mudar de direção ou velocidade
- Maior massa significa maior estabilidade, mas agilidade reduzida
Geração de Empuxo
A equação fundamental para o empuxo gerado por uma hélice é:
T = CT × ρ × n² × D⁴
Onde:
- T = Empuxo (N)
- CT = Coeficiente de empuxo (depende do design da hélice)
- ρ = Densidade do ar (kg/m³)
- n = Velocidade de rotação (revoluções por segundo)
- D = Diâmetro da hélice (m)
Essa equação revela várias percepções importantes:
- O empuxo aumenta com o quadrado da velocidade de rotação
- O empuxo aumenta com a quarta potência do diâmetro da hélice
- Hélices maiores são significativamente mais eficientes do que as menores
- A densidade do ar afeta o empuxo (o desempenho diminui em altitudes mais elevadas)
Observei essa relação em primeira mão ao testar diferentes tamanhos de hélices. Passar de uma hélice de 5" para uma de 6" (um aumento de 20% no diâmetro) pode teoricamente fornecer um aumento de 107% no empuxo na mesma RPM, embora os ganhos no mundo real sejam tipicamente menores devido às limitações do motor.
Princípios de Configuração e Controle de Multirotores
Configurações Comuns
Os multirotores vêm em várias configurações, cada uma com características únicas:
- Tricóptero: Três motores, requer um servo para controle de guinada
- Quadricóptero: Quatro motores, a configuração mais comum
- Configuração "X" (os motores formam um padrão X)
- Configuração "+" (os motores formam um padrão +)
- Hexacóptero: Seis motores, maior capacidade de carga e redundância
- Octocóptero: Oito motores, máxima capacidade de carga e redundância
O quadricóptero se tornou o padrão para a maioria das aplicações devido ao seu equilíbrio ideal de simplicidade, eficiência e autoridade de controle.
Padrões de Rotação do Motor
Para que um multirotor mantenha um voo estável, os motores devem girar em direções opostas para neutralizar os efeitos de torque:
Em um quadricóptero típico:
- Os motores diagonais giram na mesma direção
- Os motores adjacentes giram em direções opostas
- Esse padrão equilibra as forças de torque durante o voo pairado
- Ele também fornece a autoridade de controle necessária para manobras
Os Seis Graus de Liberdade
Os multirotores operam com seis graus de liberdade (6DOF), que representam todas as maneiras possíveis pelas quais a aeronave pode se mover no espaço tridimensional:
- Translação ao longo de três eixos:
- Acelerador/Altitude (eixo Z): Controlado aumentando ou diminuindo todos os motores igualmente
- Frente/Trás (eixo Y): Controlado inclinando o drone (inclinando para frente/para trás)
- Esquerda/Direita (eixo X): Controlado rolando o drone (inclinando para a esquerda/direita)
- Rotação em torno de três eixos:
- Arfagem: Rotação em torno do eixo X (nariz para cima/para baixo)
- Rolagem: Rotação em torno do eixo Y (inclinação para a esquerda/direita)
- Guinada: Rotação em torno do eixo Z (girar no sentido horário/anti-horário)
Mecanismos de Controle
O controlador de voo alcança o controle variando a velocidade de motores individuais:
Controle de Aceleração
- Todos os motores aumentam ou diminuem a velocidade igualmente
- Controla diretamente a aceleração vertical
- Em pairar estável, o impulso total é igual ao peso
Controle de Arfagem
- Os motores dianteiros diminuem enquanto os motores traseiros aumentam (ou vice-versa)
- Cria um torque em torno do eixo Y
- Resulta em inclinação para frente ou para trás e movimento subsequente
Controle de Rolagem
- Os motores esquerdos diminuem enquanto os motores direitos aumentam (ou vice-versa)
- Cria um torque em torno do eixo X
- Resulta em inclinação para a esquerda ou direita e movimento subsequente
Controle de Guinada
- Os motores CW aumentam enquanto os motores CCW diminuem (ou vice-versa)
- Cria um torque líquido em torno do eixo Z
- Resulta em rotação no sentido horário ou anti-horário
Descobri que entender esses mecanismos de controle é crucial para diagnosticar problemas de voo. Por exemplo, se seu drone deriva para a direita apesar do ajuste de nível, isso pode indicar um problema de calibração, desequilíbrio de potência do motor ou até mesmo uma leve curvatura da estrutura afetando o equilíbrio de impulso esquerda-direita.
Dinâmica de Voo e Estabilidade
Estabilidade Estática vs. Dinâmica
Os multirotores exibem diferentes características de estabilidade:
- Estabilidade Estática: A tendência de retornar ao equilíbrio quando perturbado
- Os multirotores são inerentemente estaticamente instáveis sem assistência eletrônica
- O centro de gravidade abaixo do plano da hélice melhora a estabilidade estática
- Estabilidade Dinâmica: A tendência de as oscilações diminuírem com o tempo
- Afetada pelo ajuste PID e desempenho do loop de controle
- Influenciada pela rigidez da estrutura e distribuição de massa
Ao contrário das aeronaves de asa fixa que podem ser projetadas com estabilidade inerente, os multirotores dependem inteiramente da estabilização eletrônica ativa.
Momentos de Inércia
A distribuição de massa de um drone afeta significativamente suas características de voo:
- Momento de Inércia: Resistência à aceleração angular em torno de um eixo
- Massa Centralizada: Menor momento de inércia, mais responsivo às entradas de controle
- Massa Distribuída: Maior momento de inércia, mais estável, mas menos responsivo
É por isso que os drones de corrida normalmente têm designs compactos e centralizados para máxima agilidade, enquanto as plataformas de fotografia costumam ter peso mais distribuído para movimentos mais suaves.
O Efeito Pêndulo
A posição do centro de gravidade em relação ao plano da hélice cria um efeito de pêndulo:
- CG abaixo do plano da hélice: Cria um efeito de pêndulo de auto-correção
- CG no plano da hélice: Estabilidade neutra, mais responsivo
- CG acima do plano da hélice: Pêndulo invertido, altamente instável
A maioria dos drones é projetada com a bateria montada abaixo da estrutura para abaixar o CG e melhorar a estabilidade. Experimentei diferentes posições de bateria e descobri que levantar a bateria mais perto do plano da hélice aumenta a agilidade, mas requer mais habilidade do piloto e melhor ajuste.
Sistemas de Controle e Controladores de Voo
O Loop de Controle
Os controladores de voo modernos usam um sistema de controle de feedback:

- Setpoint: O estado desejado (a partir das entradas do receptor)
- Feedback: O estado real (dos sensores)
- Erro: A diferença entre o setpoint e o feedback
- Controlador: Calcula as saídas para minimizar o erro
- Planta: O próprio drone, respondendo às saídas
- Sensores: Medem o estado do drone para fornecer feedback
Este sistema de malha fechada é executado centenas de vezes por segundo para manter a estabilidade.
Controle PID
O algoritmo de controle mais comum usado em controladores de voo é o PID (Proporcional-Integral-Derivativo):
- Proporcional (P): Responde proporcionalmente ao erro atual
- P mais alto: Resposta mais agressiva, potencial para oscilação
- P mais baixo: Resposta mais suave, potencial para lentidão
- Integral (I): Responde ao erro acumulado ao longo do tempo
- I mais alto: Melhor para corrigir erros persistentes, potencial para overshoot
- I mais baixo: Menos overshoot, pode não corrigir totalmente os erros
- Derivativo (D): Responde à taxa de variação do erro
- D mais alto: Melhor amortecimento de oscilações, sensível a ruídos
- D mais baixo: Menos sensível a ruídos, pode permitir oscilações

O ajuste adequado do PID é essencial para o desempenho ideal do voo. Normalmente, começo com os termos P para obter um comportamento responsivo, mas não oscilatório, depois adiciono I para eliminar a deriva e, finalmente, adiciono D para amortecer quaisquer oscilações restantes.
Giroscópios e Acelerômetros
Os principais sensores em um controlador de voo são:
- Giroscópio: Mede a velocidade angular em torno de cada eixo
- Sensor primário para estabilização
- Alta taxa de atualização (8kHz+)
- Sujeito a deriva ao longo do tempo
- Acelerômetro: Mede a aceleração linear, incluindo a gravidade
- Usado para referência de horizonte
- Taxa de atualização mais baixa que o giroscópio
- Afetado pela aceleração do drone
O controlador de voo combina dados desses sensores para determinar a atitude e o movimento do drone.
Filtros Complementares e de Kalman
Para superar as limitações de sensores individuais, os controladores de voo usam algoritmos de fusão de sensores:
Here is the translated content in Portuguese with the same formatting and links updated according to the rules:
- Filtro Complementar: Abordagem simples que combina dados do giroscópio e do acelerômetro
- Dados do giroscópio para precisão de curto prazo
- Dados do acelerômetro para referência de longo prazo
- Computacionalmente eficiente
- Filtro de Kalman: Abordagem mais sofisticada
- Previsão estatística do estado verdadeiro
- Considera o ruído e a incerteza do sensor
- Mais intensivo computacionalmente
Esses filtros fornecem uma estimativa mais precisa da atitude do drone do que qualquer sensor único poderia fornecer.
Conceitos Avançados de Voo
Relação Empuxo-Peso
A relação empuxo-peso (TWR) é uma métrica crítica para o desempenho do drone:
- TWR < 1: Não pode decolar
- TWR ≈ 1-1.5: Voo lento e estável (plataformas de fotografia)
- TWR ≈ 2-3: Desempenho equilibrado (drones freestyle)
- TWR ≈ 4-7: Alto desempenho (drones de corrida)
- TWR > 7: Extremamente agressivo (corrida/freestyle especializado)
Maior TWR fornece:
- Melhor aceleração
- Ângulos de subida mais íngremes
- Manobras mais agressivas
- Distâncias de parada mais curtas
- Maior resistência ao vento
No entanto, também resulta em:
- Tempo de voo reduzido
- Controle mais desafiador
- Maiores requisitos de energia
Carregamento do Disco da Hélice
O carregamento do disco é a relação entre o peso e a área total varrida pelas hélices:
- Baixo carregamento do disco: Mais eficiente, melhor desempenho de pairar
- Alto carregamento do disco: Menos eficiente, melhor para voo para frente
Esse conceito explica por que hélices maiores são mais eficientes para pairar e por que aumentar o tamanho da hélice geralmente produz melhor tempo de voo do que aumentar a capacidade da bateria.
Torque do Motor e Inércia da Hélice
A interação entre o torque do motor e a inércia da hélice afeta a resposta do acelerador:
- Torque do Motor: Capacidade de mudar o RPM rapidamente
- Motores de maior KV geralmente têm menor torque
- Volumes maiores de estator fornecem mais torque
- Inércia da Hélice: Resistência a mudanças de RPM
- Hélices maiores têm maior inércia
- Hélices mais pesadas têm maior inércia
A relação entre o torque do motor e a inércia da hélice determina a capacidade de resposta do acelerador. É por isso que os drones de corrida geralmente usam hélices menores e mais leves com motores de alto torque para máxima capacidade de resposta.
Linearidade e Resolução do Acelerador
A relação entre a entrada do acelerador e a saída de empuxo não é linear:
- O empuxo aumenta com o quadrado do RPM do motor
- Isso cria uma resposta não linear do acelerador
- Protocolos digitais como DShot ajudam a melhorar a resolução
- Controladores de voo modernos implementam curvas de aceleração para linearizar a resposta
Entender essa não linearidade é crucial para o controle preciso do acelerador, especialmente em cenários de voo de proximidade e corrida.
Efeito Solo
Ao voar perto de uma superfície, os drones experimentam o efeito solo:
- Aumento da eficiência ao pairar dentro de ~1 diâmetro de hélice de uma superfície
- Criado pelo amortecimento do ar entre as hélices e a superfície
- Pode causar sustentação inesperada ao decolar ou pousar
- Mais pronunciado com hélices maiores
Notei que esse efeito é particularmente forte com drones cinematográficos usando hélices grandes, às vezes fazendo com que eles "pulem" durante as tentativas de pouso se o acelerador não for reduzido adequadamente.
Modos de Voo e Algoritmos de Controle
Modo de Taxa vs. Autonivelamento
Os controladores de voo modernos oferecem diferentes modos de controle:
- Modo de Taxa (Acro/Manual):
- O controlador apenas estabiliza as taxas de rotação
- O drone manterá sua atitude quando os sticks estiverem centralizados
- Permite total liberdade de movimento, incluindo voo invertido
- Preferido por pilotos de freestyle e corrida
- Modos de Autonivelamento (Ângulo/Horizonte):
- O controlador trabalha ativamente para manter a orientação nivelada
- O drone retorna ao nível quando os sticks estão centralizados
- Ângulo máximo de inclinação limitado
- Mais fácil para iniciantes e fotografia aérea
A principal diferença é que o modo de taxa controla a velocidade angular, enquanto os modos de autonivelamento controlam o ângulo absoluto.
Proteção do Envelope de Voo
Alguns controladores de voo implementam limites para evitar situações perigosas:
- Limites de ângulo: Evitam inclinação excessiva que pode causar perda de altitude
- Limites de potência: Evitam danos à bateria por consumo excessivo de corrente
- Limites de velocidade: Restringem a velocidade máxima por segurança
- Geofencing: Evita voar em áreas restritas ou além de uma distância definida
Essas proteções são mais comuns em drones comerciais e fotográficos do que em modelos de corrida/freestyle.
Algoritmos Avançados de Controle
Além do PID básico, os controladores de voo avançados implementam:
- Feedforward: Antecipa as necessidades de controle com base na entrada do stick
- Filtros de entalhe dinâmicos: Identificam e filtram automaticamente frequências ressonantes
- Anti-gravidade: Compensa as mudanças de empuxo durante ajustes rápidos do acelerador
- Airmode: Mantém a autoridade durante manobras de aceleração zero
Esses algoritmos melhoram significativamente o desempenho do voo, particularmente em manobras extremas e cenários de corrida.
Fatores Ambientais que Afetam o Voo
Densidade do Ar e Altitude
A densidade do ar afeta diretamente o desempenho da hélice:
- Maior densidade (menor altitude, ar mais frio): Mais empuxo, melhor eficiência
- Menor densidade (maior altitude, ar mais quente): Menos empuxo, eficiência reduzida
A 1500 metros acima do nível do mar, um drone pode perder 10-15% de seu empuxo em comparação com o desempenho ao nível do mar. Eu experimentei isso em primeira mão ao voar em locais de montanha, onde os drones parecem notavelmente menos potentes e responsivos.
Vento e Turbulência
O vento cria desafios complexos para o voo de drones:
- Vento constante: Requer correção constante para manter a posição
- Vento com rajadas: Distúrbios imprevisíveis que exigem resposta rápida
- Turbulência: Movimento caótico do ar, especialmente ao redor de obstáculos
- Gradiente de vento: A velocidade do vento aumenta com a altura acima do solo
Os controladores de voo modernos podem compensar o vento até certo ponto, mas entender os padrões e limitações do vento é essencial para voar com segurança.
Efeitos da Temperatura
A temperatura afeta vários aspectos do desempenho do drone:
- Motores: Temperaturas mais altas reduzem a eficiência e a potência máxima
- Baterias: O frio reduz a capacidade e a voltagem; o calor aumenta a resistência interna
- Eletrônicos: Temperaturas extremas podem afetar a calibração do sensor
- Densidade do ar: Temperaturas mais altas reduzem a densidade do ar e o empuxo
Descobri que o desempenho em condições muito frias (abaixo de zero) pode cair 20-30% em comparação com temperaturas ideais, principalmente devido a limitações da bateria.
FAQ: Perguntas Comuns Sobre a Teoria de Voo de Drones
Como os drones mantêm a estabilidade sem um rotor de cauda como os helicópteros?
Ao contrário dos helicópteros que usam um rotor de cauda para neutralizar o torque do rotor principal, os multirotores usam hélices contra-rotativas. Em um quadricóptero, dois motores giram no sentido horário e dois giram no sentido anti-horário, equilibrando as forças de torque. Esse design elimina a necessidade de um rotor de cauda e simplifica significativamente o sistema mecânico. O controlador de voo ajusta constantemente as velocidades individuais dos motores para manter a orientação desejada.
Qual é a diferença entre motores com e sem escova em termos de dinâmica de voo?
Os motores sem escova proporcionam maiores relações potência-peso, melhor eficiência e tempos de resposta mais rápidos em comparação com os motores com escova. Do ponto de vista da dinâmica de voo, os motores sem escova oferecem:
- Controle mais preciso devido à aceleração/desaceleração mais rápida
- Maior impulso máximo para melhor desempenho
- Desempenho mais consistente ao longo do ciclo de descarga da bateria
- Menor momento de inércia no conjunto rotativo
Essas vantagens se traduzem em características de voo mais responsivas e melhor desempenho geral, razão pela qual praticamente todos os drones de desempenho usam motores sem escova.
Como a tensão da bateria afeta as características de voo?
A tensão da bateria tem vários efeitos no voo:
- Tensão mais alta permite que os motores girem mais rápido, aumentando o impulso máximo
- A queda de tensão sob carga afeta a potência disponível durante manobras agressivas
- A tensão diminui à medida que a bateria descarrega, reduzindo gradualmente o desempenho
- Diferentes sistemas de tensão (3S, 4S, 6S) requerem seleção apropriada de KV do motor
Os controladores de voo modernos implementam compensação de tensão para manter características de voo consistentes ao longo do ciclo de descarga da bateria, mas o desempenho máximo ainda diminuirá à medida que a tensão cair.
Por que os drones de corrida usam ângulos de inclinação tão altos?
Os drones de corrida geralmente voam em ângulos de inclinação extremos para a frente (30-60°) por várias razões:
- Para direcionar mais impulso para a frente para aceleração e velocidade
- Para reduzir a área frontal e minimizar o arrasto
- Para manter a linha de visão com os portões/obstáculos da corrida abaixo
O ângulo máximo de inclinação eficiente depende da relação impulso-peso. Um drone precisa de uma TWR de pelo menos 1,15 para pairar em um ângulo de 30°, 1,41 para pairar a 45° e 2,0 para pairar a 60°. Os drones de corrida normalmente têm TWRs de 4-7+ para permitir esses ângulos extremos enquanto mantêm a capacidade de altitude e aceleração.
Como a altitude e a densidade do ar afetam o desempenho do drone?
À medida que a altitude aumenta, a densidade do ar diminui, o que reduz a eficiência da hélice. Isso afeta os drones de várias maneiras:
- Redução do impulso máximo (normalmente 3-4% por 1000 pés de elevação)
- Diminuição da autoridade de controle e capacidade de resposta
- Temperaturas mais altas do motor devido a menos resfriamento
- Tempos de voo potencialmente mais curtos devido aos motores trabalhando mais
Ao voar em altitudes elevadas, é aconselhável usar hélices maiores, baterias de maior capacidade e padrões de voo mais conservadores para compensar esses efeitos.
O que causa oscilações de propwash e como elas podem ser minimizadas?
As oscilações de propwash ocorrem quando um drone voa através do ar turbulento criado por suas próprias hélices, normalmente durante mudanças rápidas de direção ou descidas. Esse fluxo de ar perturbado reduz a eficiência da hélice e cria forças imprevisíveis que o controlador de voo deve compensar.
Para minimizar o propwash:
- Ajuste os valores de PID apropriadamente, particularmente os termos D
- Use filtragem dinâmica para se adaptar às condições de mudança
- Implemente recursos avançados do controlador de voo, como mitigação de propwash
- Adote técnicas de voo que minimizem transições rápidas através de ar perturbado
- Considere designs de estrutura que separem as hélices ainda mais ou usem dutos
Como a distribuição de peso afeta as características de voo?
A distribuição de peso determina os momentos de inércia do drone em torno de cada eixo, o que afeta diretamente a rapidez com que ele pode mudar de orientação:
- Massa centralizada (menor momento de inércia) permite taxas de rotação mais rápidas
- Massa distribuída (maior momento de inércia) proporciona movimento mais estável e suave
- A distribuição assimétrica de peso pode causar manuseio inconsistente entre os eixos
Os drones de corrida normalmente centralizam a massa para máxima agilidade, enquanto as plataformas de fotografia distribuem o peso de maneira mais uniforme para movimentos mais suaves e melhor estabilidade.
Qual é a relação entre KV do motor, tensão e tamanho da hélice?
Esses três fatores devem ser equilibrados para um desempenho ideal:
- O KV do motor determina o RPM por volt (por exemplo, um motor 2400KV em 4S girará a aproximadamente 35.520 RPM sem carga)
- Motores de KV mais alto funcionam melhor com hélices menores e tensões mais baixas
- Motores de KV mais baixo funcionam melhor com hélices maiores e tensões mais altas
A combinação ideal fornece o impulso desejado enquanto mantém os motores dentro de sua faixa de operação eficiente. Como regra geral:
- Hélices de 5": 1800-2600KV em 4S, 1300-1700KV em 6S
- Hélices de 6": 1600-1900KV em 4S, 1100-1400KV em 6S
- Hélices de 7": 1300-1600KV em 4S, 900-1200KV em 6S
Como os filtros do giroscópio afetam o desempenho do voo?
Os filtros do giroscópio removem o ruído dos dados do sensor, mas introduzem latência:
- Mais filtragem proporciona operação mais suave, mas resposta mais lenta
- Menos filtragem proporciona resposta mais rápida, mas pode permitir que o ruído afete o controle
- Filtros dinâmicos se ajustam automaticamente às condições atuais
O equilíbrio ideal de filtragem depende da aplicação:
- Corrida: Filtragem mínima para máxima capacidade de resposta
- Estilo livre: Filtragem moderada para resposta limpa sem oscilações
- Fotografia: Filtragem mais alta para movimento suave e previsível
O que causa a queda de tensão da bateria e como isso afeta o voo?
A queda de tensão ocorre quando uma bateria não pode manter sua tensão sob carga devido à resistência interna:
- Mais pronunciada com baterias mais antigas ou de menor qualidade
- Piora à medida que a bateria descarrega
- Aumenta com maior consumo de corrente (voo agressivo)
Essa queda de tensão reduz a potência disponível e pode causar:
- Redução do impulso máximo durante manobras de alta aceleração
- Características de voo inconsistentes
- Avisos prematuros de baixa tensão
- Perda potencial de controle se for grave
O uso de baterias com classificações C apropriadas para seu estilo de voo e a implementação de limitação de aceleração à medida que as baterias descarregam podem ajudar a gerenciar esses efeitos.
Conclusão
Compreender os princípios teóricos por trás do voo multirotor fornece uma base para se tornar um piloto, construtor e solucionador de problemas mais habilidoso. Embora os controladores de voo modernos lidem com os cálculos complexos necessários para um voo estável, saber como e por que os drones se comportam como eles permite que você:
- Faça escolhas informadas de componentes para suas necessidades específicas
- Ajuste seu drone para um desempenho ideal
- Diagnostique e resolva problemas de voo
- Voe com maior precisão e confiança
- Expanda os limites do que é possível com aeronaves multirrotor
O campo da tecnologia de drones continua evoluindo rapidamente, com avanços em motores, baterias, algoritmos de controle e materiais expandindo constantemente o envelope de desempenho. Ao entender os princípios fundamentais abordados neste guia, você estará bem equipado para avaliar e aproveitar essas inovações em seus próprios voos.
Seja você esteja construindo seu primeiro drone ou o centésimo, espero que este guia ajude a aprofundar seu entendimento da fascinante física e engenharia que tornam o voo multirrotor possível. Bons voos!
Referências e Leitura Adicional
- Motores de Drone: Seleção, Desempenho e Otimização
- Hélices de Drone: Seleção, Desempenho e Otimização
- Frames de Drone: Tamanhos, Materiais e Seleção
- Controladores de Voo de Drone: Princípios e Operação
- Amortecimento de Vibração de Drone


