ドローンフライト理論:マルチローターフライトの物理学と原理
ドローンの飛行を極めたいパイロットにとって、飛行の理論的原理を理解することは不可欠です。飛行力学を研究し、数え切れないほどのドローンを製作してきた経験から、飛行理論をしっかりと理解することで、優れたパイロットが卓越したパイロットへと変貌を遂げられることがわかりました。このガイドでは、マルチローターの飛行を可能にする物理学と原理を詳しく解説します。
マルチローター飛行理論の概要
マルチローターは、従来の固定翼機やヘリコプターとは根本的に異なる特殊な航空機です。ホバリング、精密な機動、様々な飛行モード間の移行が可能な点で汎用性が高い一方、複雑な飛行力学も伴います。
根本的な違い
空気中を移動する翼型によって揚力を生み出す固定翼機や、スワッシュプレートのような複雑な機械システムでメインローターを制御する従来のヘリコプターとは異なり:
- マルチローターは複数の固定ピッチプロペラを使用する
- モーター間の推力差によって制御を行う
- ヘリコプターのような機械的な複雑さはないが、洗練された電子制御システムを必要とする
このアプローチにより、機械的にはシンプルだが、電子的にも数学的にも複雑な飛行システムが生まれます。
マルチローター飛行の基本物理
4つの力
他の航空機と同様、マルチローターには4つの主要な力が作用します:
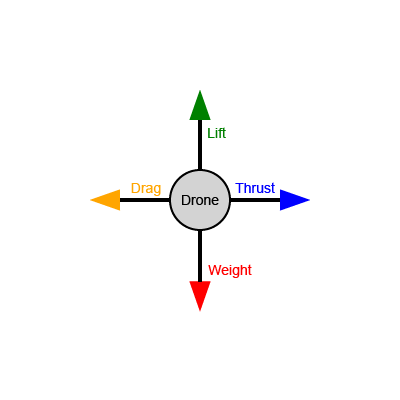
- 揚力: プロペラによって生み出される上向きの力
- プロペラの回転数の2乗に比例する
- プロペラの設計、空気密度、モーターの出力に影響される
- ドローンを傾けることで方向付け(ベクトル化)できる
- 重力: 重力による一定の下向きの力
- ドローンの質量に重力加速度を掛けたものに等しい
- 重心を通して作用する
- ドローンの向きに関係なく一定
- 抗力: 空気中の運動に逆らう抵抗力
- 速度の2乗に比例して増加する
- ドローンの空力特性に影響される
- 運動と反対方向に作用する
- 推力: ドローンを水平方向に推進する力
- 傾斜によってプロペラの力を向きを変えることで生成される
- 前後左右の移動を可能にする
- 水平運動を維持するには抗力に打ち勝つ必要がある
その他の考慮事項:
- 慣性: 4つの基本的な力ではないが、ドローンの動特性に影響する
- ドローンの質量とその分布によって決まる
- ドローンが方向や速度を変更する速さに影響する
- 質量が大きいほど安定性は高まるが、機敏性は低下する
推力の発生
プロペラによって生み出される推力の基本式は次の通りです:
T = CT × ρ × n² × D⁴
ここで:
- T = 推力 (N)
- CT = 推力係数 (プロペラの設計に依存)
- ρ = 空気密度 (kg/m³)
- n = 回転速度 (毎秒の回転数)
- D = プロペラ直径 (m)
この式からいくつかの重要な洞察が得られます:
- 推力は回転速度の2乗に比例して増加する
- 推力はプロペラ直径の4乗に比例して増加する
- 大型プロペラは小型プロペラよりも著しく効率的である
- 空気密度は推力に影響する(高高度では性能が低下する)
私はこの関係を、異なるプロペラサイズでテストした際に直接観察しました。5インチから6インチのプロペラに変更する(直径が20%増加)と、理論上は同じRPMで107%の推力増加が得られますが、実際にはモーターの制限により、それよりも低い増加率になります。
マルチローターの構成と制御原理
一般的な構成
マルチローターにはさまざまな構成があり、それぞれ独自の特性を持っています:
- トライコプター: 3つのモーター、ヨー制御にサーボが必要
- クアッドコプター: 4つのモーター、最も一般的な構成
- "X"構成 (モーターがX字型に配置)
- "+"構成 (モーターが+字型に配置)
- ヘキサコプター: 6つのモーター、より大きな揚力と冗長性
- オクトコプター: 8つのモーター、最大の揚力と冗長性
クアッドコプターは、シンプルさ、効率、制御性のバランスが最適なため、ほとんどの用途で標準となっています。
モーターの回転パターン
マルチローターが安定した飛行を維持するには、トルクの影響を相殺するために、モーターが反対方向に回転する必要があります:
一般的なクアッドコプターでは:
- 対角線上のモーターは同じ方向に回転する
- 隣り合うモーターは反対方向に回転する
- このパターンはホバリング時のトルクを均等にする
- また、機動に必要な制御性も提供する
6自由度
マルチローターは6自由度(6DOF)で動作します。これは、機体が3次元空間で動くことができるすべての方法を表しています:
- 3軸に沿った並進運動:
- スロットル/高度 (Z軸): すべてのモーターを均等に増減することで制御
- 前進/後退 (Y軸): ドローンをピッチ(前後に傾ける)ことで制御
- 左/右 (X軸): ドローンをロール(左右に傾ける)ことで制御
- 3軸周りの回転運動:
- ピッチ: X軸周りの回転 (機首を上下に傾ける)
- ロール: Y軸周りの回転 (左右に傾ける)
- ヨー: Z軸周りの回転 (時計回り/反時計回りに回転)
制御メカニズム
フライトコントローラーは、個々のモーターの速度を変えることで制御を実現します:
スロットル制御
- すべてのモーターが等しく速度を上げ下げする
- 垂直加速度を直接制御する
- 安定したホバリング状態では、総推力が重量と等しくなる
ピッチ制御
- 前部モーターが減速し、後部モーターが加速する(またはその逆)
- Y軸周りのトルクを生成する
- 前後の傾斜とそれに続く移動が生じる
ロール制御
- 左側モーターが減速し、右側モーターが加速する(またはその逆)
- X軸周りのトルクを生成する
- 左右の傾斜とそれに続く移動が生じる
ヨー制御
- CWモーターが加速し、CCWモーターが減速する(またはその逆)
- Z軸周りの正味のトルクを生成する
- 時計回りまたは反時計回りの回転が生じる
私は、これらの制御メカニズムを理解することが、飛行の問題を診断するために非常に重要だと考えています。例えば、ドローンが水平トリムにもかかわらず右に流れる場合、キャリブレーションの問題、モーターの出力不均衡、または左右の推力バランスに影響を与える微妙なフレームの曲がりを示している可能性があります。
飛行力学と安定性
静的安定性と動的安定性
マルチローターは異なる安定性特性を示します:
- 静的安定性: 外乱を受けた際に平衡状態に戻ろうとする傾向
- マルチローターは電子的な支援なしでは本質的に静的に不安定である
- 重心がプロペラ面より下にあると静的安定性が向上する
- 動的安定性: 時間とともに振動が減衰する傾向
- PIDチューニングと制御ループの性能に影響される
- フレームの剛性と質量分布の影響を受ける
固定翼機は固有の安定性を持つように設計できるのに対し、マルチローターは完全に能動的な電子安定化に依存しています。
慣性モーメント
ドローンの質量分布はその飛行特性に大きな影響を与えます:
- 慣性モーメント: ある軸周りの角加速度に対する抵抗
- 集中質量: 慣性モーメントが小さく、制御入力に対する応答性が高い
- 分散質量: 慣性モーメントが大きく、安定性は高いが応答性は低い
このため、レーシングドローンは最大の機敏性を得るためにコンパクトで集中的な設計になっていることが多く、一方、写真撮影用のプラットフォームはより滑らかな動きのために重量を分散させていることが多いのです。
振り子効果
重心の位置がプロペラ面に対してどこにあるかで、振り子効果が生じます:
- 重心がプロペラ面より下: 自己復元力のある振り子効果を生む
- 重心がプロペラ面上: 中立的な安定性で、最も応答性が高い
- 重心がプロペラ面より上: 逆振り子で、非常に不安定
ほとんどのドローンは、重心を下げて安定性を高めるために、バッテリーをフレームの下に取り付けるように設計されています。私はバッテリーの位置を変えて実験してみましたが、バッテリーをプロペラ面に近づけると機敏性は増しますが、より高いパイロットスキルとチューニングが必要になることがわかりました。
制御システムとフライトコントローラー
制御ループ
現代のフライトコントローラーはフィードバック制御システムを使用しています:

- 目標値: 望ましい状態(受信機の入力から)
- フィードバック: 実際の状態(センサーから)
- 誤差: 目標値とフィードバックの差
- コントローラー: 誤差を最小化するための出力を計算する
- プラント: 出力に応答するドローン自体
- センサー: ドローンの状態を測定してフィードバックを提供する
この閉ループシステムは、安定性を維持するために1秒間に数百回実行されます。
PID制御
フライトコントローラーで最も一般的に使用される制御アルゴリズムはPID(比例-積分-微分)です:
- 比例(P): 現在の誤差に比例して応答する
- Pが高い: より積極的な応答、発振の可能性あり
- Pが低い: より滑らかな応答、鈍さの可能性あり
- 積分(I): 時間とともに蓄積された誤差に応答する
- Iが高い: 持続的な誤差の修正に優れているが、オーバーシュートの可能性あり
- Iが低い: オーバーシュートが少ないが、誤差を完全に修正できない可能性あり
- 微分(D): 誤差の変化率に応答する
- Dが高い: 振動の減衰に優れているが、ノイズに敏感
- Dが低い: ノイズに対する感度が低いが、振動を許容する可能性あり

適切なPIDチューニングは、最適な飛行性能のために不可欠です。私は通常、応答性が高く発振しない動作を得るためにP項から始め、次にドリフトを排除するためにIを追加し、最後に残っている振動を抑制するためにDを追加します。
ジャイロスコープと加速度計
フライトコントローラーの主要なセンサーは以下の通りです:
- ジャイロスコープ: 各軸周りの角速度を測定する
- 安定化のための主要なセンサー
- 高い更新レート(8kHz以上)
- 時間とともにドリフトする
- 加速度計: 重力を含む直線加速度を測定する
- 水平基準として使用される
- ジャイロよりも更新レートが低い
- ドローンの加速度の影響を受ける
フライトコントローラーは、これらのセンサーからのデータを融合して、ドローンの姿勢と動きを判断します。
相補フィルターとカルマンフィルター
個々のセンサーの限界を克服するために、フライトコントローラーはセンサーフュージョンアルゴリズムを使用します:
- 相補フィルター: ジャイロと加速度計のデータを組み合わせるシンプルなアプローチ
- 短期的な精度のためのジャイロデータ
- 長期的な基準としての加速度計データ
- 計算効率が高い
- カルマンフィルター: より洗練されたアプローチ
- 真の状態の統計的予測
- センサーノイズと不確実性を考慮
- 計算量が多い
これらのフィルターは、単一のセンサーでは得られない、ドローンの姿勢のより正確な推定値を提供します。
高度な飛行の概念
推力重量比
推力重量比(TWR)は、ドローンのパフォーマンスにとって重要な指標です:
- TWR < 1: 離陸できない
- TWR ≈ 1-1.5: 低速で安定した飛行(撮影プラットフォーム)
- TWR ≈ 2-3: バランスのとれたパフォーマンス(フリースタイルドローン)
- TWR ≈ 4-7: 高性能(レーシングドローン)
- TWR > 7: 非常にアグレッシブ(特殊なレーシング/フリースタイル)
TWRが高いと以下のようになります:
- 加速性能の向上
- 急な上昇角度
- より激しい機動
- 短い停止距離
- 高い耐風性
ただし、以下のようなデメリットもあります:
- 飛行時間の短縮
- 制御の難易度上昇
- 高い電力要件
プロペラのディスクローディング
ディスクローディングは、重量とプロペラが掃引する総面積の比率です:
- 低ディスクローディング: より効率的でホバリング性能が良い
- 高ディスクローディング: 効率は低いが前進飛行に適している
この概念は、大型プロペラがホバリングに効率的な理由と、バッテリー容量を増やすよりもプロペラサイズを大きくする方が飛行時間が延びることが多い理由を説明しています。
モーターのトルクとプロペラの慣性
モーターのトルクとプロペラの慣性の相互作用は、スロットルレスポンスに影響します:
- モーターのトルク: RPMを素早く変化させる能力
- KV値の高いモーターは一般的にトルクが低い
- ステーター容積が大きいほどトルクが大きい
- プロペラの慣性: RPM変化に対する抵抗
- 大型プロペラは慣性が大きい
- 重いプロペラは慣性が大きい
モーターのトルクとプロペラの慣性の比率がスロットル応答性を決定します。このため、レーシングドローンではしばしば高トルクモーターと組み合わせて小型軽量プロペラを使用し、最大の応答性を実現しています。
スロットルの直線性と分解能
スロットル入力と推力出力の関係は非線形です:
- 推力はモーターのRPMの2乗に比例して増加
- これにより非線形のスロットル応答が生じる
- DShotのようなデジタルプロトコルが分解能の向上に役立つ
- 最新のフライトコントローラーはスロットルカーブを実装して応答を直線化
この非線形性を理解することは、特に近接飛行やレース場面での正確なスロットル制御に不可欠です。
グランドエフェクト
地表面に近い飛行時、ドローンはグランドエフェクトを受けます:
- プロペラ直径の約1倍以内の高度でホバリングすると効率が向上
- プロペラと地表面の間の空気のクッション効果により生じる
- 離着陸時に予期せぬ揚力を生じることがある
- プロペラが大きいほど顕著
大型プロペラを使用する映画用ドローンでこの効果が特に強く、スロットルを適切に下げないと着陸時に「跳ねる」ことがあるのを私は経験しました。
フライトモードと制御アルゴリズム
レートモードとセルフレベリング
最新のフライトコントローラーは異なる制御モードを提供します:
- レートモード(アクロ/マニュアル):
- コントローラーは回転レートのみを安定化
- スティックを中立に戻すとドローンは現在の姿勢を維持
- 反転飛行を含む完全な動作の自由度を提供
- フリースタイルおよびレースパイロットに好まれる
- セルフレベリングモード(アングル/ホライゾン):
- コントローラーは水平姿勢の維持に積極的に働きかける
- スティックを中立に戻すとドローンは水平に戻る
- 最大傾斜角が制限される
- 初心者や空撮に適している
重要な違いは、レートモードが角速度を制御するのに対し、セルフレベリングモードは絶対角度を制御することです。
飛行エンベロープ保護
一部のフライトコントローラーは危険な状況を防ぐための制限を実装しています:
- 角度制限: 高度低下を引き起こす可能性のある過度の傾斜を防止
- 電力制限: 過剰な電流による電池の損傷を防止
- 速度制限: 安全のために最高速度を制限
- ジオフェンシング: 制限区域内や設定距離を超えての飛行を防止
これらの保護機能は、レーシング/フリースタイル機よりも商用・撮影用ドローンで一般的です。
高度な制御アルゴリズム
基本的なPIDを超えて、高度なフライトコントローラーは以下を実装しています:
- フィードフォワード: スティック入力に基づいて制御ニーズを予測
- 動的ノッチフィルター: 共振周波数を自動的に特定してフィルタリング
- アンチグラビティ: 急激なスロットル調整時の推力変化を補償
- エアモード: ゼロスロットル時の機動でも制御を維持
これらのアルゴリズムは、特に極端な機動やレース場面で飛行性能を大幅に向上させます。
飛行に影響を与える環境要因
空気密度と高度
空気密度はプロペラの性能に直接影響します:
- 高密度(低高度、冷たい空気): 推力が大きく効率が良い
- 低密度(高高度、暖かい空気): 推力が小さく効率が低下
海抜5000フィートでは、海面高度と比較してドローンの推力が10〜15%失われる可能性があります。山岳地帯で飛行した際、ドローンの力強さと反応性が著しく低下するのを私自身経験しました。
風と乱気流
風はドローンの飛行に複雑な課題をもたらします:
- 定常風: 位置を維持するために絶えず修正が必要
- 突風: 予測不可能な乱れで素早い対応が必要
- 乱気流: 特に障害物周辺での無秩序な空気の動き
- 風の勾配: 地上からの高度に応じて風速が増加
最新のフライトコントローラーはある程度風を補正できますが、風のパターンと制限を理解することが安全な飛行に不可欠です。
温度の影響
温度はドローンの性能の多くの側面に影響します:
- モーター: 高温では効率と最大出力が低下
- バッテリー: 低温では容量と電圧が低下、高温では内部抵抗が増加
- 電子機器: 極端な温度ではセンサーのキャリブレーションに影響
- 空気密度: 高温では空気密度と推力が低下
私の経験では、主にバッテリーの制限により、氷点下の非常に寒い条件下では最適温度と比較して性能が20〜30%低下することがあります。
ドローンフライト理論に関するよくある質問
ヘリコプターのようなテールローターがないのに、ドローンはどのように安定性を維持するのですか?
ヘリコプターはテールローターを使ってメインローターのトルクを打ち消しますが、マルチローターは反対方向に回転するプロペラを使用します。クアッドコプターでは、2つのモーターが時計回りに、2つが反時計回りに回転し、トルク力のバランスを取ります。この設計により、テールローターが不要になり、機械システムが大幅に簡素化されます。フライトコントローラーは、目的の方向を維持するために、個々のモーター速度を常に調整しています。
フライトダイナミクスの観点から、ブラシ付きモーターとブラシレスモーターの違いは何ですか?
ブラシレスモーターは、ブラシ付きモーターと比較して、パワー重量比が高く、効率が良く、応答時間が速いという特徴があります。フライトダイナミクスの観点から、ブラシレスモーターには以下のような利点があります:
- 加速/減速が速いため、より正確な制御が可能
- 最大推力が高いため、より高いパフォーマンスを発揮
- バッテリー放電サイクル全体を通して、より一貫したパフォーマンスを発揮
- 回転アセンブリの慣性モーメントが低い
これらの利点は、より応答性の高いフライト特性と全体的なパフォーマンスの向上につながります。そのため、事実上すべてのパフォーマンス重視のドローンはブラシレスモーターを使用しています。
バッテリー電圧はフライト特性にどのような影響を与えますか?
バッテリー電圧は、フライトにいくつかの影響を与えます:
- 電圧が高いほどモーターの回転速度が上がり、最大推力が増加する
- 負荷時の電圧サグは、アグレッシブな機動中に利用可能な電力に影響する
- バッテリーの放電に伴い電圧が低下し、徐々にパフォーマンスが低下する
- 異なる電圧システム(3S、4S、6S)には、適切なモーターKVの選択が必要
最新のフライトコントローラーは、バッテリー放電サイクル全体を通して一貫したフライト特性を維持するために電圧補償を実装していますが、電圧が低下するにつれて最大パフォーマンスは低下します。
レーシングドローンが極端に高い傾斜角を使うのはなぜですか?
レーシングドローンは、しばしば極端な前方傾斜角(30〜60°)で飛行します。その理由はいくつかあります:
- 加速と速度のために、より多くの推力を前方に向けるため
- 前面面積を減らし、抵抗を最小限に抑えるため
- 下にあるレーシングゲート/障害物との視線を維持するため
最大効率傾斜角は、推力重量比に依存します。ドローンが30°の角度でホバリングするには、少なくとも1.15のTWRが必要で、45°では1.41、60°では2.0のTWRが必要です。レーシングドローンは通常、これらの極端な角度を維持しながら、高度と加速能力を維持するために、4〜7以上のTWRを持っています。
高度と空気密度はドローンのパフォーマンスにどのような影響を与えますか?
高度が上がるにつれて空気密度が低下し、プロペラの効率が低下します。これはドローンにいくつかの影響を与えます:
- 最大推力の低下(通常、1000フィートの高度上昇ごとに3〜4%)
- 制御力と応答性の低下
- 冷却効果の低下によるモーター温度の上昇
- モーターが頑張らなければならないため、飛行時間が短くなる可能性がある
高高度で飛行する場合は、これらの影響を補うために、より大きなプロペラ、より高容量のバッテリー、より控えめな飛行パターンを使用することをお勧めします。
プロップウォッシュ振動の原因は何で、どのように最小限に抑えることができますか?
プロップウォッシュ振動は、ドローンが自身のプロペラによって作られた乱気流を通過するときに発生します。これは通常、急な方向転換や降下時に起こります。この乱れた気流はプロペラの効率を低下させ、フライトコントローラーが補正しなければならない予測不可能な力を生み出します。
プロップウォッシュを最小限に抑えるには:
- 特にD項を適切に調整したPID値を使用する
- 動的フィルタリングを使用して変化する条件に適応する
- プロップウォッシュ緩和などの高度なフライトコントローラー機能を実装する
- 乱れた空気を通る急激な遷移を最小限に抑える飛行テクニックを採用する
- プロペラ間の距離を広げたり、ダクトを使用したりするフレーム設計を検討する
重量分布はフライト特性にどのように影響しますか?
重量分布は、各軸周りのドローンの慣性モーメントを決定し、方向転換の速さに直接影響します:
- 集中質量(慣性モーメントが低い)は、より速い回転速度を可能にする
- 分散質量(慣性モーメントが高い)は、より安定した滑らかな動きを提供する
- 非対称の重量分布は、軸間で一貫性のない操縦性を引き起こす可能性がある
レーシングドローンは通常、最大の機敏性のために質量を集中させ、写真撮影用プラットフォームは、より滑らかな動きと安定性のために重量をより均等に分散させます。
モーターのKV、電圧、プロペラサイズの関係は何ですか?
最適なパフォーマンスを得るには、これら3つの要素のバランスを取る必要があります:
- モーターのKVは、1ボルトあたりのRPMを決定する(例えば、2400KVのモーターを4Sで使用すると、無負荷時に約35,520RPMで回転する)
- KVの高いモーターは、小さなプロペラと低電圧に最適
- KVの低いモーターは、大きなプロペラと高電圧に最適
理想的な組み合わせは、モーターを効率的な動作範囲内に保ちながら、目的の推力を提供するものです。一般的な目安として:
- 5インチプロペラ:4Sで1800-2600KV、6Sで1300-1700KV
- 6インチプロペラ:4Sで1600-1900KV、6Sで1100-1400KV
- 7インチプロペラ:4Sで1300-1600KV、6Sで900-1200KV
ジャイロフィルターはフライトパフォーマンスにどのように影響しますか?
ジャイロフィルターはセンサーデータからノイズを除去しますが、レイテンシを引き起こします:
- フィルタリングを多くすると動作が滑らかになりますが、応答が遅くなります
- フィルタリングを少なくすると応答が速くなりますが、ノイズが制御に影響する可能性があります
- 動的フィルターは現在の状況に自動的に適応します
最適なフィルタリングのバランスは、用途によって異なります:
- レース:最大の応答性のために最小限のフィルタリング
- フリースタイル:振動のないクリーンな応答のために適度なフィルタリング
- 写真撮影:滑らかで予測可能な動きのためのより高いフィルタリング
バッテリー電圧サグの原因は何で、フライトにどのように影響しますか?
電圧サグは、内部抵抗のためにバッテリーが負荷時に電圧を維持できないときに発生します:
- 古いバッテリーや品質の低いバッテリーでより顕著になる
- バッテリーの放電に伴って悪化する
- 電流引き出しが大きいほど(アグレッシブな飛行)増加する
この電圧降下は利用可能な電力を減少させ、以下のような影響を与える可能性があります:
- 高スロットル時の最大推力の低下
- 一貫性のないフライト特性
- 早すぎる低電圧警告
- 深刻な場合は制御不能になる可能性がある
飛行スタイルに適したC レーティングのバッテリーを使用し、バッテリーの放電に合わせてスロットル制限を実装することで、これらの影響を管理するのに役立ちます。
結論
マルチローターフライトの背後にある理論的原理を理解することは、より熟練したパイロット、ビルダー、トラブルシューターになるための基礎を提供します。最新のフライトコントローラーは安定したフライトに必要な複雑な計算を処理しますが、ドローンがどのように、そしてなぜそのように動作するかを知ることで、以下のようなことができるようになります:
- 特定のニーズに合わせたコンポーネントの選択方法を学ぶ
- ドローンを最適なパフォーマンスに調整する方法
- 飛行上の問題を診断し、解決する方法
- より高い精度と自信を持って飛行する方法
- マルチローター機の可能性の限界に挑戦する方法
ドローン技術の分野は、モーター、バッテリー、制御アルゴリズム、材料の進歩により、パフォーマンスの限界が常に拡大され、急速に進化し続けています。このガイドで取り上げた基本原理を理解することで、自分自身の飛行でこれらのイノベーションを評価し、活用するための十分な知識を得ることができるでしょう。
初めてのドローン製作でも、100機目のドローン製作でも、このガイドがマルチローター飛行を可能にする魅力的な物理学とエンジニアリングの理解を深めるのに役立つことを願っています。ハッピーフライト!


