Teoria del volo dei droni: fisica e principi del volo multirotore
Comprendere i principi teorici alla base del volo dei droni è essenziale per i piloti che vogliono padroneggiare la loro arte, risolvere i problemi e ottimizzare le prestazioni. Dopo anni di studio della dinamica di volo e di costruzione di innumerevoli droni, ho scoperto che una solida comprensione della teoria del volo può trasformare un buon pilota in uno eccezionale. Questa guida completa vi guiderà attraverso la fisica e i principi che rendono possibile il volo dei multirotori.
Introduzione alla teoria del volo dei multirotori
I multirotori rappresentano una categoria unica di aeromobili che differiscono fondamentalmente dagli aerei ad ala fissa tradizionali e dagli elicotteri. La loro capacità di volare in hovering, di manovrare con precisione e di passare da una modalità di volo all'altra li rende versatili, ma introduce anche una complessa dinamica di volo.
La differenza fondamentale
A differenza degli aerei ad ala fissa che generano portanza attraverso profili alari che si muovono nell'aria, o degli elicotteri tradizionali che utilizzano sistemi meccanici complessi come i piatti oscillanti per controllare un rotore principale:
- I multirotori utilizzano più eliche a passo fisso
- Ottengono il controllo attraverso la spinta differenziale tra i motori
- Non hanno la complessità meccanica degli elicotteri ma richiedono sofisticati sistemi di controllo elettronico
Questo approccio crea un sistema di volo meccanicamente più semplice ma elettronicamente e matematicamente più complesso.
Fisica di base del volo dei multirotori
Le quattro forze
Come tutti gli aeromobili, i multirotori sono soggetti a quattro forze primarie:
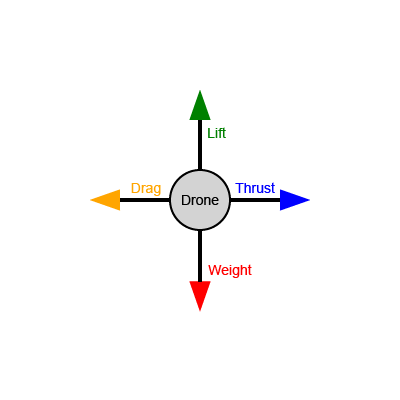
- Portanza: La forza verso l'alto generata dalle eliche
- Direttamente proporzionale al quadrato degli RPM dell'elica
- Influenzata dal design dell'elica, dalla densità dell'aria e dalla potenza del motore
- Può essere vettorizzata (diretta) inclinando il drone
- Peso: La forza costante verso il basso dovuta alla gravità
- Uguale alla massa del drone moltiplicata per l'accelerazione gravitazionale
- Agisce attraverso il centro di gravità
- Rimane costante indipendentemente dall'orientamento del drone
- Resistenza: La forza di resistenza che si oppone al movimento attraverso l'aria
- Aumenta con il quadrato della velocità
- Influenzata dal profilo aerodinamico del drone
- Agisce nella direzione opposta al movimento
- Spinta: La forza che spinge il drone orizzontalmente
- Generata reindirizzando la forza dell'elica attraverso l'inclinazione
- Permette il movimento in avanti, indietro e laterale
- Deve superare la resistenza per mantenere il movimento orizzontale
Considerazione aggiuntiva:
- Inerzia: Pur non essendo una delle quattro forze fondamentali, influisce sulla dinamica del drone
- Determinata dalla massa del drone e dalla sua distribuzione
- Influisce sulla rapidità con cui il drone può cambiare direzione o velocità
- Una massa maggiore significa maggiore stabilità ma minore agilità
Generazione della spinta
L'equazione fondamentale per la spinta generata da un'elica è:
T = CT × ρ × n² × D⁴
Dove:
- T = Spinta (N)
- CT = Coefficiente di spinta (dipende dal design dell'elica)
- ρ = Densità dell'aria (kg/m³)
- n = Velocità di rotazione (giri al secondo)
- D = Diametro dell'elica (m)
Questa equazione rivela diverse intuizioni importanti:
- La spinta aumenta con il quadrato della velocità di rotazione
- La spinta aumenta con la quarta potenza del diametro dell'elica
- Le eliche più grandi sono significativamente più efficienti di quelle più piccole
- La densità dell'aria influisce sulla spinta (le prestazioni diminuiscono ad altitudini più elevate)
Ho osservato questa relazione in prima persona quando ho testato diverse dimensioni di eliche. Passare da un'elica da 5" a una da 6" (un aumento del 20% del diametro) può teoricamente fornire un aumento del 107% della spinta allo stesso RPM, anche se i guadagni nel mondo reale sono tipicamente inferiori a causa delle limitazioni del motore.
Principi di configurazione e controllo dei multirotori
Configurazioni comuni
I multirotori sono disponibili in varie configurazioni, ognuna con caratteristiche uniche:
- Tricottero: Tre motori, richiede un servo per il controllo dell'imbardata
- Quadricottero: Quattro motori, la configurazione più comune
- Configurazione "X" (i motori formano uno schema a X)
- Configurazione "+" (i motori formano uno schema a +)
- Esacottero: Sei motori, maggiore capacità di sollevamento e ridondanza
- Ottocottero: Otto motori, massima capacità di sollevamento e ridondanza
Il quadricottero è diventato lo standard per la maggior parte delle applicazioni grazie al suo equilibrio ottimale di semplicità, efficienza e autorità di controllo.
Schemi di rotazione del motore
Affinché un multirotore mantenga un volo stabile, i motori devono ruotare in direzioni opposte per contrastare gli effetti di coppia:
In un tipico quadricottero:
- I motori diagonali ruotano nella stessa direzione
- I motori adiacenti ruotano in direzioni opposte
- Questo schema bilancia le forze di coppia durante il volo stazionario
- Fornisce anche la necessaria autorità di controllo per le manovre
I sei gradi di libertà
I multirotori operano con sei gradi di libertà (6DOF), che rappresentano tutti i modi possibili in cui l'aeromobile può muoversi nello spazio tridimensionale:
- Traslazione lungo tre assi:
- Acceleratore/Altitudine (asse Z): Controllato aumentando o diminuendo tutti i motori in modo uguale
- Avanti/Indietro (asse Y): Controllato inclinando il drone (inclinazione avanti/indietro)
- Sinistra/Destra (asse X): Controllato inclinando il drone (inclinazione sinistra/destra)
- Rotazione attorno a tre assi:
- Beccheggio: Rotazione attorno all'asse X (naso su/giù)
- Rollio: Rotazione attorno all'asse Y (inclinazione sinistra/destra)
- Imbardata: Rotazione attorno all'asse Z (rotazione in senso orario/antiorario)
Meccanismi di controllo
Il controllore di volo ottiene il controllo variando la velocità dei singoli motori:
Controllo dell'acceleratore
- Tutti i motori aumentano o diminuiscono la velocità in modo uguale
- Controlla direttamente l'accelerazione verticale
- In hovering stabile, la spinta totale è uguale al peso
Controllo del beccheggio
- I motori anteriori diminuiscono mentre i motori posteriori aumentano (o viceversa)
- Crea una coppia attorno all'asse Y
- Risulta in un'inclinazione in avanti o all'indietro e nel successivo movimento
Controllo del rollio
- I motori di sinistra diminuiscono mentre i motori di destra aumentano (o viceversa)
- Crea una coppia attorno all'asse X
- Risulta in un'inclinazione a sinistra o a destra e nel successivo movimento
Controllo dell'imbardata
- I motori CW aumentano mentre i motori CCW diminuiscono (o viceversa)
- Crea una coppia netta attorno all'asse Z
- Risulta in una rotazione in senso orario o antiorario
Ho scoperto che comprendere questi meccanismi di controllo è fondamentale per diagnosticare i problemi di volo. Ad esempio, se il drone si sposta verso destra nonostante il trim a livello, potrebbe indicare un problema di calibrazione, uno squilibrio di potenza del motore o anche una sottile piegatura del telaio che influisce sull'equilibrio della spinta sinistra-destra.
Dinamica di volo e stabilità
Stabilità statica vs. dinamica
I multirotori mostrano diverse caratteristiche di stabilità:
- Stabilità statica: La tendenza a tornare all'equilibrio quando disturbati
- I multirotori sono intrinsecamente staticamente instabili senza assistenza elettronica
- Il centro di gravità sotto il piano dell'elica migliora la stabilità statica
- Stabilità dinamica: La tendenza delle oscillazioni a smorzarsi nel tempo
- Influenzata dalla sintonizzazione PID e dalle prestazioni del loop di controllo
- Influenzata dalla rigidità del telaio e dalla distribuzione della massa
A differenza degli aeromobili ad ala fissa che possono essere progettati con stabilità intrinseca, i multirotori si affidano interamente alla stabilizzazione elettronica attiva.
Momenti di inerzia
La distribuzione della massa di un drone influisce significativamente sulle sue caratteristiche di volo:
- Momento di inerzia: Resistenza all'accelerazione angolare attorno a un asse
- Massa centralizzata: Momento di inerzia inferiore, più reattivo agli input di controllo
- Massa distribuita: Momento di inerzia superiore, più stabile ma meno reattivo
Ecco perché i droni da corsa hanno tipicamente design compatti e centralizzati per la massima agilità, mentre le piattaforme fotografiche hanno spesso un peso più distribuito per un movimento più fluido.
L'effetto pendolo
La posizione del centro di gravità rispetto al piano dell'elica crea un effetto pendolo:
- CG sotto il piano dell'elica: Crea un effetto pendolo autoraddrizzante
- CG al piano dell'elica: Stabilità neutra, più reattiva
- CG sopra il piano dell'elica: Pendolo invertito, altamente instabile
La maggior parte dei droni è progettata con la batteria montata sotto il telaio per abbassare il CG e migliorare la stabilità. Ho sperimentato diverse posizioni della batteria e ho scoperto che avvicinare la batteria al piano dell'elica aumenta l'agilità ma richiede più abilità del pilota e una migliore messa a punto.
Sistemi di controllo e controllori di volo
Il loop di controllo
I moderni controllori di volo utilizzano un sistema di controllo a feedback:

- Setpoint: Lo stato desiderato (dagli input del ricevitore)
- Feedback: Lo stato effettivo (dai sensori)
- Errore: La differenza tra setpoint e feedback
- Controllore: Calcola gli output per minimizzare l'errore
- Impianto: Il drone stesso, che risponde agli output
- Sensori: Misurano lo stato del drone per fornire feedback
Questo sistema a circuito chiuso viene eseguito centinaia di volte al secondo per mantenere la stabilità.
Controllo PID
L'algoritmo di controllo più comune utilizzato nei controllori di volo è il PID (Proporzionale-Integrale-Derivativo):
- Proporzionale (P): Risponde proporzionalmente all'errore corrente
- P più alto: Risposta più aggressiva, potenziale di oscillazione
- P più basso: Risposta più fluida, potenziale di lentezza
- Integrale (I): Risponde all'errore accumulato nel tempo
- I più alto: Migliore nella correzione di errori persistenti, potenziale di overshoot
- I più basso: Meno overshoot, potrebbe non correggere completamente gli errori
- Derivativo (D): Risponde alla velocità di variazione dell'errore
- D più alto: Migliore smorzamento delle oscillazioni, sensibile al rumore
- D più basso: Meno sensibile al rumore, può consentire oscillazioni

Una corretta sintonizzazione del PID è essenziale per prestazioni di volo ottimali. In genere inizio con i termini P per ottenere un comportamento reattivo ma non oscillante, quindi aggiungo I per eliminare la deriva e infine aggiungo D per smorzare eventuali oscillazioni residue.
Giroscopi e accelerometri
I sensori principali in un controllore di volo sono:
- Giroscopio: Misura la velocità angolare attorno a ciascun asse
- Sensore primario per la stabilizzazione
- Alta frequenza di aggiornamento (8kHz+)
- Soggetto a deriva nel tempo
- Accelerometro: Misura l'accelerazione lineare inclusa la gravità
- Utilizzato per il riferimento dell'orizzonte
- Frequenza di aggiornamento inferiore rispetto al giroscopio
- Influenzato dall'accelerazione del drone
Il controllore di volo fonde i dati di questi sensori per determinare l'assetto e il movimento del drone.
Filtri complementari e di Kalman
Per superare i limiti dei singoli sensori, i controllori di volo utilizzano algoritmi di fusione dei sensori:
- Filtro complementare: Approccio semplice che combina i dati di giroscopio e accelerometro
- Dati del giroscopio per la precisione a breve termine
- Dati dell'accelerometro per il riferimento a lungo termine
- Computazionalmente efficiente
- Filtro di Kalman: Approccio più sofisticato
- Previsione statistica dello stato reale
- Tiene conto del rumore e dell'incertezza dei sensori
- Più intensivo dal punto di vista computazionale
Questi filtri forniscono una stima più accurata dell'assetto del drone rispetto a qualsiasi singolo sensore.
Concetti di volo avanzati
Rapporto spinta-peso
Il rapporto spinta-peso (TWR) è una metrica critica per le prestazioni del drone:
- TWR < 1: Non può decollare
- TWR ≈ 1-1.5: Volo lento e stabile (piattaforme fotografiche)
- TWR ≈ 2-3: Prestazioni bilanciate (droni freestyle)
- TWR ≈ 4-7: Alte prestazioni (droni da corsa)
- TWR > 7: Estremamente aggressivo (corse/freestyle specializzati)
Un TWR più alto fornisce:
- Migliore accelerazione
- Angoli di salita più ripidi
- Manovre più aggressive
- Distanze di arresto più brevi
- Maggiore resistenza al vento
Tuttavia, comporta anche:
- Tempo di volo ridotto
- Controllo più impegnativo
- Maggiori requisiti di potenza
Carico del disco dell'elica
Il carico del disco è il rapporto tra il peso e l'area totale spazzata dalle eliche:
- Basso carico del disco: Più efficiente, migliori prestazioni in hovering
- Alto carico del disco: Meno efficiente, migliore per il volo in avanti
Questo concetto spiega perché eliche più grandi sono più efficienti per l'hovering e perché aumentare la dimensione dell'elica spesso produce un tempo di volo migliore rispetto all'aumento della capacità della batteria.
Coppia del motore e inerzia dell'elica
L'interazione tra la coppia del motore e l'inerzia dell'elica influisce sulla risposta dell'acceleratore:
- Coppia del motore: Capacità di cambiare rapidamente i giri/min
- I motori con KV più alto generalmente hanno una coppia inferiore
- Volumi dello statore più grandi forniscono più coppia
- Inerzia dell'elica: Resistenza ai cambiamenti di giri/min
- Eliche più grandi hanno un'inerzia maggiore
- Eliche più pesanti hanno un'inerzia maggiore
Il rapporto tra la coppia del motore e l'inerzia dell'elica determina la reattività dell'acceleratore. Ecco perché i droni da corsa spesso usano eliche più piccole e leggere con motori ad alta coppia per la massima reattività.
Linearità e risoluzione dell'acceleratore
La relazione tra l'input dell'acceleratore e l'output della spinta non è lineare:
- La spinta aumenta con il quadrato dei giri/min del motore
- Ciò crea una risposta non lineare dell'acceleratore
- I protocolli digitali come DShot aiutano a migliorare la risoluzione
- I moderni flight controller implementano curve dell'acceleratore per linearizzare la risposta
Comprendere questa non linearità è fondamentale per un controllo preciso dell'acceleratore, specialmente in scenari di volo in prossimità e di gara.
Effetto suolo
Quando si vola vicino a una superficie, i droni sperimentano l'effetto suolo:
- Maggiore efficienza quando si vola entro ~1 diametro dell'elica da una superficie
- Creato dall'ammortizzazione dell'aria tra le eliche e la superficie
- Può causare una portanza inaspettata durante il decollo o l'atterraggio
- Più pronunciato con eliche più grandi
Ho notato che questo effetto è particolarmente forte con i droni cinematografici che usano eliche grandi, a volte facendoli "rimbalzare" durante i tentativi di atterraggio se l'acceleratore non viene ridotto in modo appropriato.
Modalità di volo e algoritmi di controllo
Modalità Rate vs. Auto-livellamento
I moderni flight controller offrono diverse modalità di controllo:
- Modalità Rate (Acro/Manuale):
- Il controller stabilizza solo le velocità di rotazione
- Il drone manterrà il suo assetto quando gli stick sono centrati
- Consente una completa libertà di movimento, incluso il volo invertito
- Preferito dai piloti freestyle e di gara
- Modalità Auto-livellamento (Angle/Horizon):
- Il controller lavora attivamente per mantenere un orientamento livellato
- Il drone ritorna al livello quando gli stick sono centrati
- Angolo di inclinazione massimo limitato
- Più facile per principianti e fotografia aerea
La differenza chiave è che la modalità Rate controlla la velocità angolare, mentre le modalità Auto-livellamento controllano l'angolo assoluto.
Protezione dell'inviluppo di volo
Alcuni flight controller implementano limiti per prevenire situazioni pericolose:
- Limiti di angolo: Prevengono un'inclinazione eccessiva che potrebbe causare perdita di quota
- Limiti di potenza: Prevengono danni alla batteria da un eccessivo assorbimento di corrente
- Limiti di velocità: Limitano la velocità massima per sicurezza
- Geofencing: Impedisce di volare in aree ristrette o oltre una distanza impostata
Queste protezioni sono più comuni nei droni commerciali e fotografici che nei modelli da corsa/freestyle.
Algoritmi di controllo avanzati
Oltre al PID di base, i flight controller avanzati implementano:
- Feedforward: Anticipa le esigenze di controllo in base all'input dello stick
- Filtri notch dinamici: Identificano e filtrano automaticamente le frequenze risonanti
- Anti-gravità: Compensa i cambiamenti di spinta durante rapide regolazioni dell'acceleratore
- Airmode: Mantiene l'autorità durante le manovre a zero accelerazione
Questi algoritmi migliorano significativamente le prestazioni di volo, in particolare in manovre estreme e scenari di gara.
Fattori ambientali che influenzano il volo
Densità dell'aria e altitudine
La densità dell'aria influisce direttamente sulle prestazioni dell'elica:
- Densità più alta (bassa quota, aria più fredda): Più spinta, migliore efficienza
- Densità più bassa (alta quota, aria più calda): Meno spinta, efficienza ridotta
A 1500 metri sul livello del mare, un drone potrebbe perdere il 10-15% della sua spinta rispetto alle prestazioni a livello del mare. Ho sperimentato questo di persona quando ho volato in località di montagna, dove i droni si sentono notevolmente meno potenti e reattivi.
Vento e turbolenza
Il vento crea sfide complesse per il volo dei droni:
- Vento costante: Richiede una correzione costante per mantenere la posizione
- Vento a raffiche: Disturbi imprevedibili che richiedono una risposta rapida
- Turbolenza: Movimento caotico dell'aria, specialmente intorno agli ostacoli
- Gradiente di vento: La velocità del vento aumenta con l'altezza dal suolo
I moderni flight controller possono compensare il vento in una certa misura, ma comprendere i modelli di vento e le limitazioni è essenziale per un volo sicuro.
Effetti della temperatura
La temperatura influisce su molteplici aspetti delle prestazioni del drone:
- Motori: Temperature più alte riducono l'efficienza e la potenza massima
- Batterie: Il freddo riduce la capacità e la tensione; il caldo aumenta la resistenza interna
- Elettronica: Temperature estreme possono influire sulla calibrazione dei sensori
- Densità dell'aria: Temperature più alte riducono la densità dell'aria e la spinta
Ho scoperto che le prestazioni in condizioni molto fredde (sotto lo zero) possono diminuire del 20-30% rispetto alle temperature ottimali, principalmente a causa delle limitazioni della batteria.
FAQ: Domande comuni sulla teoria del volo dei droni
Come fanno i droni a mantenere la stabilità senza un rotore di coda come gli elicotteri?
A differenza degli elicotteri che utilizzano un rotore di coda per contrastare la coppia del rotore principale, i multirotori utilizzano eliche controrotanti. In un quadricottero, due motori girano in senso orario e due in senso antiorario, bilanciando le forze di coppia. Questo design elimina la necessità di un rotore di coda e semplifica notevolmente il sistema meccanico. Il flight controller regola costantemente la velocità dei singoli motori per mantenere l'orientamento desiderato.
Qual è la differenza tra motori brushed e brushless in termini di dinamica di volo?
I motori brushless offrono rapporti potenza-peso più elevati, migliore efficienza e tempi di risposta più rapidi rispetto ai motori brushed. Dal punto di vista della dinamica di volo, i motori brushless offrono:
- Controllo più preciso grazie ad accelerazione/decelerazione più rapida
- Spinta massima più elevata per prestazioni migliori
- Prestazioni più consistenti durante il ciclo di scarica della batteria
- Momento d'inerzia inferiore nel gruppo rotante
Questi vantaggi si traducono in caratteristiche di volo più reattive e prestazioni complessive migliori, motivo per cui praticamente tutti i droni ad alte prestazioni utilizzano motori brushless.
Come influisce la tensione della batteria sulle caratteristiche di volo?
La tensione della batteria ha diversi effetti sul volo:
- Una tensione più alta consente ai motori di girare più velocemente, aumentando la spinta massima
- Il calo di tensione sotto carico influisce sulla potenza disponibile durante le manovre aggressive
- La tensione diminuisce man mano che la batteria si scarica, riducendo gradualmente le prestazioni
- Diversi sistemi di tensione (3S, 4S, 6S) richiedono un'appropriata selezione del KV del motore
I moderni flight controller implementano la compensazione della tensione per mantenere caratteristiche di volo consistenti durante il ciclo di scarica della batteria, ma le prestazioni massime diminuiranno comunque con il calo della tensione.
Perché i droni da corsa utilizzano angoli di inclinazione così elevati?
I droni da corsa spesso volano con angoli di inclinazione in avanti estremi (30-60°) per diversi motivi:
- Per dirigere più spinta in avanti per accelerazione e velocità
- Per ridurre l'area frontale e minimizzare la resistenza aerodinamica
- Per mantenere la linea di vista con i cancelli/ostacoli di gara sottostanti
L'angolo di inclinazione massimo efficiente dipende dal rapporto spinta-peso. Un drone ha bisogno di un TWR di almeno 1,15 per volare stazionario a un angolo di 30°, 1,41 per volare stazionario a 45° e 2,0 per volare stazionario a 60°. I droni da corsa hanno tipicamente TWR di 4-7+ per consentire questi angoli estremi mantenendo la capacità di altitudine e accelerazione.
Come influiscono l'altitudine e la densità dell'aria sulle prestazioni del drone?
All'aumentare dell'altitudine, la densità dell'aria diminuisce, riducendo l'efficienza dell'elica. Questo influisce sui droni in diversi modi:
- Riduzione della spinta massima (tipicamente 3-4% per 1000 piedi di elevazione)
- Diminuzione dell'autorità di controllo e della reattività
- Temperature del motore più elevate a causa del minore raffreddamento
- Potenzialmente tempi di volo più brevi a causa dei motori che lavorano di più
Quando si vola ad alta quota, è consigliabile utilizzare eliche più grandi, batterie di capacità maggiore e schemi di volo più conservativi per compensare questi effetti.
Cosa causa le oscillazioni del propwash e come possono essere minimizzate?
Le oscillazioni del propwash si verificano quando un drone vola attraverso l'aria turbolenta creata dalle sue stesse eliche, tipicamente durante rapidi cambi di direzione o discese. Questo flusso d'aria disturbato riduce l'efficienza dell'elica e crea forze imprevedibili che il flight controller deve compensare.
Per minimizzare il propwash:
- Regolare i valori PID in modo appropriato, in particolare i termini D
- Utilizzare il filtraggio dinamico per adattarsi alle condizioni variabili
- Implementare funzionalità avanzate del flight controller come la mitigazione del propwash
- Adottare tecniche di volo che minimizzino le transizioni rapide attraverso l'aria disturbata
- Considerare progetti di frame che separino ulteriormente le eliche o utilizzino condotti
Come influisce la distribuzione del peso sulle caratteristiche di volo?
La distribuzione del peso determina i momenti di inerzia del drone attorno a ciascun asse, che influisce direttamente sulla velocità con cui può cambiare orientamento:
- La massa centralizzata (momento di inerzia inferiore) consente velocità di rotazione più elevate
- La massa distribuita (momento di inerzia superiore) fornisce un movimento più stabile e fluido
- La distribuzione asimmetrica del peso può causare una maneggevolezza incoerente tra gli assi
I droni da corsa tipicamente centralizzano la massa per la massima agilità, mentre le piattaforme fotografiche distribuiscono il peso in modo più uniforme per un movimento più fluido e una migliore stabilità.
Qual è la relazione tra KV del motore, tensione e dimensioni dell'elica?
Questi tre fattori devono essere bilanciati per prestazioni ottimali:
- Il KV del motore determina i giri/min per volt (ad esempio, un motore 2400KV su 4S girerà a circa 35.520 giri/min a vuoto)
- I motori con KV più alto funzionano meglio con eliche più piccole e tensioni più basse
- I motori con KV più basso funzionano meglio con eliche più grandi e tensioni più alte
La combinazione ideale fornisce la spinta desiderata mantenendo i motori nel loro range di funzionamento efficiente. Come regola generale:
- Eliche da 5": 1800-2600KV su 4S, 1300-1700KV su 6S
- Eliche da 6": 1600-1900KV su 4S, 1100-1400KV su 6S
- Eliche da 7": 1300-1600KV su 4S, 900-1200KV su 6S
Come influiscono i filtri del giroscopio sulle prestazioni di volo?
I filtri del giroscopio rimuovono il rumore dai dati del sensore ma introducono latenza:
- Più filtraggio fornisce un funzionamento più fluido ma una risposta più lenta
- Meno filtraggio fornisce una risposta più rapida ma può consentire al rumore di influenzare il controllo
- I filtri dinamici si adattano automaticamente alle condizioni attuali
Il bilanciamento ottimale del filtraggio dipende dall'applicazione:
- Gare: filtraggio minimo per la massima reattività
- Freestyle: filtraggio moderato per una risposta pulita senza oscillazioni
- Fotografia: filtraggio più elevato per un movimento fluido e prevedibile
Cosa causa il calo di tensione della batteria e come influisce sul volo?
Il calo di tensione si verifica quando una batteria non riesce a mantenere la sua tensione sotto carico a causa della resistenza interna:
- Più pronunciato con batterie vecchie o di bassa qualità
- Peggiora man mano che la batteria si scarica
- Aumenta con un maggiore assorbimento di corrente (volo aggressivo)
Questo calo di tensione riduce la potenza disponibile e può causare:
- Riduzione della spinta massima durante le manovre ad alta manetta
- Caratteristiche di volo incoerenti
- Avvisi di bassa tensione prematuri
- Potenziale perdita di controllo se grave
L'utilizzo di batterie con C-rating appropriati per il proprio stile di volo e l'implementazione della limitazione dell'acceleratore quando le batterie si scaricano possono aiutare a gestire questi effetti.
Conclusione
Comprendere i principi teorici alla base del volo dei multirotori fornisce una base per diventare un pilota, un costruttore e un risolutore di problemi più abile. Mentre i moderni flight controller gestiscono i complessi calcoli necessari per un volo stabile, sapere come e perché i droni si comportano come fanno consente di:
- Effettuare scelte informate sui componenti per le proprie esigenze specifiche
- Mettere a punto il drone per prestazioni ottimali
- Diagnosticare e risolvere problemi di volo
- Volare con maggiore precisione e sicurezza
- Spingere i limiti di ciò che è possibile con i velivoli multirotore
Il campo della tecnologia dei droni continua ad evolversi rapidamente, con progressi nei motori, nelle batterie, negli algoritmi di controllo e nei materiali che espandono costantemente i limiti delle prestazioni. Comprendendo i principi fondamentali trattati in questa guida, sarete ben attrezzati per valutare e sfruttare queste innovazioni nei vostri voli.
Che stiate costruendo il vostro primo drone o il centesimo, spero che questa guida vi aiuti ad approfondire la comprensione dell'affascinante fisica e ingegneria che rendono possibile il volo dei multirotori. Buon volo!
Riferimenti e ulteriori letture
- Motori per droni: selezione, prestazioni e ottimizzazione
- Eliche per droni: selezione, prestazioni e ottimizzazione
- Telai per droni: dimensioni, materiali e selezione
- Flight controller per droni: principi e funzionamento
- Smorzamento delle vibrazioni dei droni


