Théorie du vol de drone : Physique et principes du vol multirotor
Comprendre les principes théoriques qui sous-tendent le vol des drones est essentiel pour les pilotes qui souhaitent maîtriser leur art, résoudre les problèmes et optimiser les performances. Après des années d'étude de la dynamique de vol et de construction d'innombrables drones, j'ai constaté qu'une solide compréhension de la théorie du vol peut transformer un bon pilote en un pilote exceptionnel. Ce guide complet vous guidera à travers la physique et les principes qui rendent possible le vol des multirotors.
Introduction à la théorie du vol des multirotors
Les multirotors représentent une catégorie unique d'aéronefs qui diffèrent fondamentalement des avions traditionnels à voilure fixe et des hélicoptères. Leur capacité à planer, à manœuvrer avec précision et à passer d'un mode de vol à l'autre les rend polyvalents, mais introduit également une dynamique de vol complexe.
La différence fondamentale
Contrairement aux aéronefs à voilure fixe qui génèrent de la portance grâce à des surfaces portantes se déplaçant dans l'air, ou aux hélicoptères traditionnels qui utilisent des systèmes mécaniques complexes comme des plateaux cycliques pour contrôler un rotor principal :
- Les multirotors utilisent plusieurs hélices à pas fixe
- Ils obtiennent le contrôle grâce à une poussée différentielle entre les moteurs
- Ils n'ont pas la complexité mécanique des hélicoptères mais nécessitent des systèmes de contrôle électroniques sophistiqués
Cette approche crée un système de vol mécaniquement plus simple mais électroniquement et mathématiquement plus complexe.
Physique de base du vol des multirotors
Les quatre forces
Comme tous les aéronefs, les multirotors sont soumis à quatre forces principales :
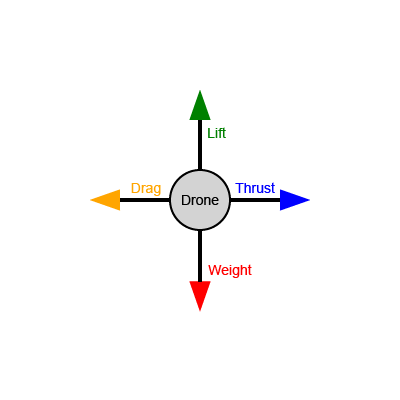
- Portance : La force ascendante générée par les hélices
- Directement proportionnelle au carré du régime des hélices
- Affectée par la conception des hélices, la densité de l'air et la puissance du moteur
- Peut être vectorisée (dirigée) en inclinant le drone
- Poids : La force descendante constante due à la gravité
- Égal à la masse du drone multipliée par l'accélération gravitationnelle
- Agit à travers le centre de gravité
- Reste constant quelle que soit l'orientation du drone
- Traînée : La force de résistance s'opposant au mouvement dans l'air
- Augmente avec le carré de la vitesse
- Affectée par le profil aérodynamique du drone
- Agit dans la direction opposée au mouvement
- Poussée : La force qui propulse le drone horizontalement
- Générée en redirigeant la force des hélices par inclinaison
- Permet un mouvement vers l'avant, vers l'arrière et latéral
- Doit surmonter la traînée pour maintenir un mouvement horizontal
Considération supplémentaire :
- Inertie : Bien que n'étant pas l'une des quatre forces fondamentales, elle affecte la dynamique du drone
- Déterminée par la masse du drone et sa distribution
- Affecte la rapidité avec laquelle le drone peut changer de direction ou de vitesse
- Une masse plus élevée signifie une plus grande stabilité mais une agilité réduite
Génération de poussée
L'équation fondamentale de la poussée générée par une hélice est :
T = CT × ρ × n² × D⁴
Où :
- T = Poussée (N)
- CT = Coefficient de poussée (dépend de la conception de l'hélice)
- ρ = Densité de l'air (kg/m³)
- n = Vitesse de rotation (tours par seconde)
- D = Diamètre de l'hélice (m)
Cette équation révèle plusieurs informations importantes :
- La poussée augmente avec le carré de la vitesse de rotation
- La poussée augmente avec la puissance quatrième du diamètre de l'hélice
- Les hélices plus grandes sont nettement plus efficaces que les plus petites
- La densité de l'air affecte la poussée (les performances diminuent à des altitudes plus élevées)
J'ai observé cette relation de première main lors de tests avec différentes tailles d'hélices. Passer d'une hélice de 5" à une hélice de 6" (une augmentation de 20% du diamètre) peut théoriquement fournir une augmentation de 107% de la poussée au même régime, bien que les gains réels soient généralement inférieurs en raison des limitations du moteur.
Configuration des multirotors et principes de contrôle
Configurations courantes
Les multirotors existent en diverses configurations, chacune avec des caractéristiques uniques :
- Tricoptère : Trois moteurs, nécessite un servo pour le contrôle du lacet
- Quadricoptère : Quatre moteurs, la configuration la plus courante
- Configuration en "X" (les moteurs forment un motif en X)
- Configuration en "+" (les moteurs forment un motif en +)
- Hexacoptère : Six moteurs, plus grande capacité de levage et redondance
- Octocoptère : Huit moteurs, capacité de levage et redondance maximales
Le quadricoptère est devenu la norme pour la plupart des applications en raison de son équilibre optimal entre simplicité, efficacité et autorité de contrôle.
Schémas de rotation des moteurs
Pour qu'un multirotor maintienne un vol stable, les moteurs doivent tourner dans des directions opposées pour contrer les effets de couple :
Dans un quadricoptère typique :
- Les moteurs diagonaux tournent dans le même sens
- Les moteurs adjacents tournent dans des directions opposées
- Ce schéma équilibre les forces de couple en vol stationnaire
- Il fournit également l'autorité de contrôle nécessaire pour les manœuvres
Les six degrés de liberté
Les multirotors fonctionnent avec six degrés de liberté (6DDL), qui représentent toutes les façons possibles dont l'aéronef peut se déplacer dans l'espace tridimensionnel :
- Translation le long de trois axes :
- Gaz/Altitude (axe Z) : Contrôlé en augmentant ou en diminuant tous les moteurs de manière égale
- Avant/Arrière (axe Y) : Contrôlé en inclinant le drone (inclinaison avant/arrière)
- Gauche/Droite (axe X) : Contrôlé en faisant rouler le drone (inclinaison gauche/droite)
- Rotation autour de trois axes :
- Tangage : Rotation autour de l'axe X (nez vers le haut/bas)
- Roulis : Rotation autour de l'axe Y (inclinaison gauche/droite)
- Lacet : Rotation autour de l'axe Z (rotation dans le sens horaire/antihoraire)
Mécanismes de contrôle
Le contrôleur de vol assure le contrôle en faisant varier la vitesse des moteurs individuels :
Contrôle des gaz
- Tous les moteurs augmentent ou diminuent leur vitesse de manière égale
- Contrôle directement l'accélération verticale
- En vol stationnaire stable, la poussée totale est égale au poids
Contrôle du tangage
- Les moteurs avant diminuent tandis que les moteurs arrière augmentent (ou vice versa)
- Crée un couple autour de l'axe Y
- Entraîne une inclinaison vers l'avant ou l'arrière et un mouvement subséquent
Contrôle du roulis
- Les moteurs gauches diminuent tandis que les moteurs droits augmentent (ou vice versa)
- Crée un couple autour de l'axe X
- Entraîne une inclinaison à gauche ou à droite et un mouvement subséquent
Contrôle du lacet
- Les moteurs CW augmentent tandis que les moteurs CCW diminuent (ou vice versa)
- Crée un couple net autour de l'axe Z
- Entraîne une rotation dans le sens des aiguilles d'une montre ou dans le sens inverse
J'ai constaté que la compréhension de ces mécanismes de contrôle est cruciale pour diagnostiquer les problèmes de vol. Par exemple, si votre drone dérive vers la droite malgré un trim à niveau, cela pourrait indiquer un problème de calibration, un déséquilibre de puissance des moteurs, ou même une légère courbure du cadre affectant l'équilibre de la poussée gauche-droite.
Dynamique de vol et stabilité
Stabilité statique vs dynamique
Les multirotors présentent différentes caractéristiques de stabilité :
- Stabilité statique : La tendance à revenir à l'équilibre lorsqu'il est perturbé
- Les multirotors sont intrinsèquement statiquement instables sans assistance électronique
- Un centre de gravité sous le plan des hélices améliore la stabilité statique
- Stabilité dynamique : La tendance des oscillations à s'amortir avec le temps
- Affectée par le réglage PID et les performances de la boucle de contrôle
- Influencée par la rigidité du cadre et la distribution de la masse
Contrairement aux avions à voilure fixe qui peuvent être conçus avec une stabilité inhérente, les multirotors dépendent entièrement de la stabilisation électronique active.
Moments d'inertie
La distribution de la masse d'un drone affecte de manière significative ses caractéristiques de vol :
- Moment d'inertie : Résistance à l'accélération angulaire autour d'un axe
- Masse centralisée : Moment d'inertie plus faible, plus réactif aux commandes
- Masse distribuée : Moment d'inertie plus élevé, plus stable mais moins réactif
C'est pourquoi les drones de course ont généralement des conceptions compactes et centralisées pour une agilité maximale, tandis que les plateformes de photographie ont souvent un poids plus réparti pour des mouvements plus fluides.
L'effet pendulaire
La position du centre de gravité par rapport au plan des hélices crée un effet pendulaire :
- CG sous le plan des hélices : Crée un effet de pendule auto-redresseur
- CG au niveau du plan des hélices : Stabilité neutre, plus réactif
- CG au-dessus du plan des hélices : Pendule inversé, très instable
La plupart des drones sont conçus avec la batterie montée sous le cadre pour abaisser le CG et améliorer la stabilité. J'ai expérimenté différentes positions de batterie et j'ai constaté que le fait de rapprocher la batterie du plan des hélices augmente l'agilité mais nécessite plus de compétences de pilotage et un meilleur réglage.
Systèmes de contrôle et contrôleurs de vol
La boucle de contrôle
Les contrôleurs de vol modernes utilisent un système de contrôle par rétroaction :

- Consigne : L'état souhaité (à partir des entrées du récepteur)
- Rétroaction : L'état réel (à partir des capteurs)
- Erreur : La différence entre la consigne et la rétroaction
- Contrôleur : Calcule les sorties pour minimiser l'erreur
- Système : Le drone lui-même, réagissant aux sorties
- Capteurs : Mesurent l'état du drone pour fournir une rétroaction
Ce système en boucle fermée fonctionne des centaines de fois par seconde pour maintenir la stabilité.
Contrôle PID
L'algorithme de contrôle le plus courant utilisé dans les contrôleurs de vol est le PID (Proportionnel-Intégral-Dérivé) :
- Proportionnel (P) : Réagit proportionnellement à l'erreur actuelle
- P plus élevé : Réponse plus agressive, risque d'oscillation
- P plus faible : Réponse plus douce, risque de mollesse
- Intégral (I) : Réagit à l'erreur accumulée au fil du temps
- I plus élevé : Meilleur pour corriger les erreurs persistantes, risque de dépassement
- I plus faible : Moins de dépassement, peut ne pas corriger complètement les erreurs
- Dérivé (D) : Réagit à la vitesse de variation de l'erreur
- D plus élevé : Meilleur amortissement des oscillations, sensible au bruit
- D plus faible : Moins sensible au bruit, peut permettre des oscillations

Un réglage PID approprié est essentiel pour des performances de vol optimales. Je commence généralement par les termes P pour obtenir un comportement réactif mais non oscillant, puis j'ajoute I pour éliminer la dérive, et enfin j'ajoute D pour amortir les oscillations restantes.
Gyroscopes et accéléromètres
Les principaux capteurs d'un contrôleur de vol sont :
- Gyroscope : Mesure la vitesse angulaire autour de chaque axe
- Capteur principal pour la stabilisation
- Taux de mise à jour élevé (8kHz+)
- Sujet à une dérive au fil du temps
- Accéléromètre : Mesure l'accélération linéaire, y compris la gravité
- Utilisé comme référence d'horizon
- Taux de mise à jour inférieur à celui du gyroscope
- Affecté par l'accélération du drone
Le contrôleur de vol fusionne les données de ces capteurs pour déterminer l'attitude et le mouvement du drone.
Filtres complémentaires et de Kalman
Pour surmonter les limitations des capteurs individuels, les contrôleurs de vol utilisent des algorithmes de fusion de capteurs :
Voici le contenu traduit en français avec la structure HTML préservée et les liens modifiés selon les instructions :
- Filtre complémentaire : Approche simple qui combine les données du gyroscope et de l'accéléromètre
- Données du gyroscope pour la précision à court terme
- Données de l'accéléromètre pour la référence à long terme
- Efficacité computationnelle
- Filtre de Kalman : Approche plus sophistiquée
- Prédiction statistique de l'état réel
- Prend en compte le bruit et l'incertitude des capteurs
- Plus exigeant en termes de calcul
Ces filtres fournissent une estimation plus précise de l'attitude du drone que ne pourrait le faire un seul capteur.
Concepts de vol avancés
Rapport poussée/poids
Le rapport poussée/poids (TWR) est une métrique essentielle pour les performances des drones :
- TWR < 1 : Ne peut pas décoller
- TWR ≈ 1-1.5 : Vol lent et stable (plateformes de photographie)
- TWR ≈ 2-3 : Performances équilibrées (drones freestyle)
- TWR ≈ 4-7 : Hautes performances (drones de course)
- TWR > 7 : Extrêmement agressif (course/freestyle spécialisé)
Un TWR plus élevé offre :
- Une meilleure accélération
- Des angles de montée plus raides
- Des manœuvres plus agressives
- Des distances d'arrêt plus courtes
- Une plus grande résistance au vent
Cependant, cela entraîne également :
- Une réduction du temps de vol
- Un contrôle plus difficile
- Des besoins en puissance plus élevés
Charge du disque d'hélice
La charge du disque est le rapport entre le poids et la surface totale balayée par les hélices :
- Faible charge du disque : Plus efficace, meilleures performances en vol stationnaire
- Charge élevée du disque : Moins efficace, mieux adaptée au vol vers l'avant
Ce concept explique pourquoi les hélices plus grandes sont plus efficaces pour le vol stationnaire et pourquoi l'augmentation de la taille des hélices permet souvent d'obtenir une meilleure autonomie de vol que l'augmentation de la capacité de la batterie.
Couple moteur et inertie de l'hélice
L'interaction entre le couple moteur et l'inertie de l'hélice affecte la réponse des gaz :
- Couple moteur : Capacité à changer rapidement le régime
- Les moteurs à KV plus élevé ont généralement un couple plus faible
- Des volumes de stator plus importants fournissent plus de couple
- Inertie de l'hélice : Résistance aux changements de régime
- Les hélices plus grandes ont une inertie plus élevée
- Les hélices plus lourdes ont une inertie plus élevée
Le rapport entre le couple moteur et l'inertie de l'hélice détermine la réactivité des gaz. C'est pourquoi les drones de course utilisent souvent des hélices plus petites et plus légères avec des moteurs à couple élevé pour une réactivité maximale.
Linéarité et résolution des gaz
La relation entre l'entrée des gaz et la sortie de poussée est non linéaire :
- La poussée augmente avec le carré du régime moteur
- Cela crée une réponse non linéaire des gaz
- Les protocoles numériques comme DShot aident à améliorer la résolution
- Les contrôleurs de vol modernes implémentent des courbes de gaz pour linéariser la réponse
Comprendre cette non-linéarité est crucial pour un contrôle précis des gaz, en particulier dans les scénarios de vol de proximité et de course.
Effet de sol
Lorsqu'ils volent près d'une surface, les drones subissent l'effet de sol :
- Augmentation de l'efficacité en vol stationnaire à environ 1 diamètre d'hélice d'une surface
- Créé par l'amortissement de l'air entre les hélices et la surface
- Peut provoquer une portance inattendue lors du décollage ou de l'atterrissage
- Plus prononcé avec des hélices plus grandes
J'ai remarqué que cet effet est particulièrement fort avec les drones cinématiques utilisant de grandes hélices, les faisant parfois "rebondir" lors des tentatives d'atterrissage si les gaz ne sont pas réduits de manière appropriée.
Modes de vol et algorithmes de contrôle
Mode Rate vs Auto-niveau
Les contrôleurs de vol modernes offrent différents modes de contrôle :
- Mode Rate (Acro/Manuel) :
- Le contrôleur ne stabilise que les vitesses de rotation
- Le drone maintient son assiette lorsque les manches sont centrés
- Permet une liberté totale de mouvement, y compris le vol inversé
- Préféré par les pilotes freestyle et de course
- Modes Auto-niveau (Angle/Horizon) :
- Le contrôleur travaille activement pour maintenir une orientation de niveau
- Le drone revient au niveau lorsque les manches sont centrés
- Angle d'inclinaison maximal limité
- Plus facile pour les débutants et la photographie aérienne
La différence clé est que le mode Rate contrôle la vitesse angulaire, tandis que les modes auto-niveau contrôlent l'angle absolu.
Protection de l'enveloppe de vol
Certains contrôleurs de vol mettent en œuvre des limites pour éviter les situations dangereuses :
- Limites d'angle : Empêchent une inclinaison excessive qui pourrait entraîner une perte d'altitude
- Limites de puissance : Empêchent les dommages à la batterie dus à un appel de courant excessif
- Limites de vitesse : Restreignent la vitesse maximale pour des raisons de sécurité
- Géorepérage : Empêche de voler dans des zones restreintes ou au-delà d'une distance définie
Ces protections sont plus courantes dans les drones commerciaux et de photographie que dans les modèles de course/freestyle.
Algorithmes de contrôle avancés
Au-delà du PID de base, les contrôleurs de vol avancés mettent en œuvre :
- Feedforward : Anticipe les besoins de contrôle en fonction de l'entrée des manches
- Filtres notch dynamiques : Identifie et filtre automatiquement les fréquences de résonance
- Anti-gravité : Compense les changements de poussée lors des ajustements rapides des gaz
- Airmode : Maintient l'autorité pendant les manœuvres à zéro gaz
Ces algorithmes améliorent considérablement les performances de vol, en particulier dans les manœuvres extrêmes et les scénarios de course.
Facteurs environnementaux affectant le vol
Densité de l'air et altitude
La densité de l'air affecte directement les performances de l'hélice :
- Densité plus élevée (altitude plus basse, air plus froid) : Plus de poussée, meilleure efficacité
- Densité plus faible (altitude plus élevée, air plus chaud) : Moins de poussée, efficacité réduite
À 1500 mètres au-dessus du niveau de la mer, un drone peut perdre 10 à 15% de sa poussée par rapport aux performances au niveau de la mer. J'ai expérimenté cela de première main en volant dans des lieux montagneux, où les drones se sentent nettement moins puissants et réactifs.
Vent et turbulences
Le vent crée des défis complexes pour le vol de drones :
- Vent régulier : Nécessite une correction constante pour maintenir la position
- Vent en rafales : Perturbations imprévisibles nécessitant une réponse rapide
- Turbulences : Mouvement d'air chaotique, surtout autour des obstacles
- Gradient de vent : La vitesse du vent augmente avec la hauteur au-dessus du sol
Les contrôleurs de vol modernes peuvent compenser le vent dans une certaine mesure, mais comprendre les schémas de vent et les limitations est essentiel pour un vol en toute sécurité.
Effets de la température
La température affecte de multiples aspects des performances des drones :
- Moteurs : Des températures plus élevées réduisent l'efficacité et la puissance maximale
- Batteries : Le froid réduit la capacité et la tension ; la chaleur augmente la résistance interne
- Électronique : Les températures extrêmes peuvent affecter l'étalonnage des capteurs
- Densité de l'air : Des températures plus élevées réduisent la densité de l'air et la poussée
J'ai constaté que les performances dans des conditions très froides (en dessous de zéro) peuvent chuter de 20 à 30% par rapport aux températures optimales, principalement en raison des limitations des batteries.
FAQ : Questions fréquentes sur la théorie du vol des drones
Comment les drones maintiennent-ils leur stabilité sans rotor de queue comme les hélicoptères ?
Contrairement aux hélicoptères qui utilisent un rotor de queue pour contrer le couple du rotor principal, les multirotors utilisent des hélices contrarotatives. Dans un quadricoptère, deux moteurs tournent dans le sens des aiguilles d'une montre et deux dans le sens inverse, équilibrant ainsi les forces de couple. Cette conception élimine le besoin d'un rotor de queue et simplifie considérablement le système mécanique. Le contrôleur de vol ajuste constamment la vitesse de chaque moteur pour maintenir l'orientation souhaitée.
Quelle est la différence entre les moteurs à balais et sans balais en termes de dynamique de vol ?
Les moteurs sans balais offrent des rapports puissance/poids plus élevés, une meilleure efficacité et des temps de réponse plus rapides par rapport aux moteurs à balais. Du point de vue de la dynamique de vol, les moteurs sans balais offrent :
- Un contrôle plus précis grâce à une accélération/décélération plus rapide
- Une poussée maximale plus élevée pour de meilleures performances
- Des performances plus constantes tout au long du cycle de décharge de la batterie
- Un moment d'inertie plus faible dans l'ensemble rotatif
Ces avantages se traduisent par des caractéristiques de vol plus réactives et de meilleures performances globales, c'est pourquoi pratiquement tous les drones de performance utilisent des moteurs sans balais.
Comment la tension de la batterie affecte-t-elle les caractéristiques de vol ?
La tension de la batterie a plusieurs effets sur le vol :
- Une tension plus élevée permet aux moteurs de tourner plus vite, augmentant la poussée maximale
- L'affaissement de la tension sous charge affecte la puissance disponible lors des manœuvres agressives
- La tension diminue à mesure que la batterie se décharge, réduisant progressivement les performances
- Différents systèmes de tension (3S, 4S, 6S) nécessitent une sélection appropriée du KV du moteur
Les contrôleurs de vol modernes mettent en œuvre une compensation de tension pour maintenir des caractéristiques de vol constantes tout au long du cycle de décharge de la batterie, mais les performances maximales diminueront tout de même à mesure que la tension baisse.
Pourquoi les drones de course utilisent-ils des angles d'inclinaison aussi élevés ?
Les drones de course volent souvent à des angles d'inclinaison avant extrêmes (30-60°) pour plusieurs raisons :
- Pour diriger plus de poussée vers l'avant pour l'accélération et la vitesse
- Pour réduire la surface frontale et minimiser la traînée
- Pour maintenir la ligne de vue avec les portes/obstacles de course en dessous
L'angle d'inclinaison maximal efficace dépend du rapport poussée/poids. Un drone a besoin d'un rapport poussée/poids d'au moins 1,15 pour planer à un angle de 30°, de 1,41 pour planer à 45° et de 2,0 pour planer à 60°. Les drones de course ont généralement des rapports poussée/poids de 4 à 7+ pour permettre ces angles extrêmes tout en maintenant l'altitude et la capacité d'accélération.
Comment l'altitude et la densité de l'air affectent-elles les performances des drones ?
À mesure que l'altitude augmente, la densité de l'air diminue, ce qui réduit l'efficacité de l'hélice. Cela affecte les drones de plusieurs façons :
- Réduction de la poussée maximale (généralement 3-4% par 1000 pieds d'élévation)
- Diminution de l'autorité de contrôle et de la réactivité
- Températures des moteurs plus élevées en raison d'un refroidissement moindre
- Temps de vol potentiellement plus courts en raison du travail plus intense des moteurs
Lors de vols à haute altitude, il est conseillé d'utiliser des hélices plus grandes, des batteries de plus grande capacité et des schémas de vol plus conservateurs pour compenser ces effets.
Qu'est-ce qui cause les oscillations de souffle d'hélice et comment peuvent-elles être minimisées ?
Les oscillations de souffle d'hélice se produisent lorsqu'un drone vole à travers l'air turbulent créé par ses propres hélices, généralement lors de changements de direction rapides ou de descentes. Ce flux d'air perturbé réduit l'efficacité de l'hélice et crée des forces imprévisibles que le contrôleur de vol doit compenser.
Pour minimiser le souffle d'hélice :
- Ajustez les valeurs PID de manière appropriée, en particulier les termes D
- Utilisez un filtrage dynamique pour s'adapter aux conditions changeantes
- Mettez en œuvre des fonctionnalités avancées du contrôleur de vol comme l'atténuation du souffle d'hélice
- Adoptez des techniques de vol qui minimisent les transitions rapides à travers l'air perturbé
- Envisagez des conceptions de cadre qui séparent davantage les hélices ou utilisent des conduits
Comment la répartition du poids affecte-t-elle les caractéristiques de vol ?
La répartition du poids détermine les moments d'inertie du drone autour de chaque axe, ce qui affecte directement la rapidité avec laquelle il peut changer d'orientation :
- Une masse centralisée (moment d'inertie plus faible) permet des taux de rotation plus rapides
- Une masse répartie (moment d'inertie plus élevé) offre un mouvement plus stable et plus fluide
- Une répartition asymétrique du poids peut entraîner une maniabilité incohérente entre les axes
Les drones de course centralisent généralement la masse pour une agilité maximale, tandis que les plateformes de photographie répartissent le poids de manière plus uniforme pour un mouvement plus fluide et une meilleure stabilité.
Quelle est la relation entre le KV du moteur, la tension et la taille de l'hélice ?
Ces trois facteurs doivent être équilibrés pour des performances optimales :
- Le KV du moteur détermine le nombre de tours par minute par volt (par exemple, un moteur 2400KV sur 4S tournera à environ 35 520 tr/min à vide)
- Les moteurs à KV plus élevé fonctionnent mieux avec des hélices plus petites et des tensions plus faibles
- Les moteurs à KV plus faible fonctionnent mieux avec des hélices plus grandes et des tensions plus élevées
La combinaison idéale fournit la poussée souhaitée tout en maintenant les moteurs dans leur plage de fonctionnement efficace. En règle générale :
- Hélices 5" : 1800-2600KV sur 4S, 1300-1700KV sur 6S
- Hélices 6" : 1600-1900KV sur 4S, 1100-1400KV sur 6S
- Hélices 7" : 1300-1600KV sur 4S, 900-1200KV sur 6S
Comment les filtres gyroscopiques affectent-ils les performances de vol ?
Les filtres gyroscopiques éliminent le bruit des données des capteurs mais introduisent une latence :
- Plus de filtrage offre un fonctionnement plus fluide mais une réponse plus lente
- Moins de filtrage offre une réponse plus rapide mais peut permettre au bruit d'affecter le contrôle
- Les filtres dynamiques s'adaptent automatiquement aux conditions actuelles
L'équilibre optimal du filtrage dépend de l'application :
- Course : Filtrage minimal pour une réactivité maximale
- Freestyle : Filtrage modéré pour une réponse propre sans oscillations
- Photographie : Filtrage plus élevé pour un mouvement fluide et prévisible
Qu'est-ce qui provoque l'affaissement de la tension de la batterie et comment cela affecte-t-il le vol ?
L'affaissement de la tension se produit lorsqu'une batterie ne peut pas maintenir sa tension sous charge en raison de sa résistance interne :
- Plus prononcé avec des batteries plus anciennes ou de moindre qualité
- S'aggrave à mesure que la batterie se décharge
- Augmente avec un appel de courant plus élevé (vol agressif)
Cette chute de tension réduit la puissance disponible et peut provoquer :
- Une réduction de la poussée maximale lors des manœuvres à forte accélération
- Des caractéristiques de vol incohérentes
- Des avertissements prématurés de basse tension
- Une perte potentielle de contrôle si elle est grave
L'utilisation de batteries avec des indices C appropriés pour votre style de vol et la mise en œuvre d'une limitation des gaz à mesure que les batteries se déchargent peuvent aider à gérer ces effets.
Conclusion
Comprendre les principes théoriques qui sous-tendent le vol des multirotors fournit une base pour devenir un pilote, un constructeur et un dépanneur plus compétent. Bien que les contrôleurs de vol modernes gèrent les calculs complexes nécessaires à un vol stable, savoir comment et pourquoi les drones se comportent comme ils le font vous permet de :
Voici le contenu traduit en français avec la structure HTML et les liens préservés :
- Faites des choix de composants éclairés en fonction de vos besoins spécifiques
- Réglez votre drone pour des performances optimales
- Diagnostiquez et résolvez les problèmes de vol
- Volez avec plus de précision et de confiance
- Repoussez les limites du possible avec les aéronefs multirotor
Le domaine de la technologie des drones continue d'évoluer rapidement, avec des avancées dans les moteurs, les batteries, les algorithmes de contrôle et les matériaux qui repoussent constamment les limites des performances. En comprenant les principes fondamentaux couverts dans ce guide, vous serez bien équipé pour évaluer et tirer parti de ces innovations dans vos propres vols.
Que vous construisiez votre premier drone ou votre centième, j'espère que ce guide vous aidera à approfondir votre compréhension de la physique et de l'ingénierie fascinantes qui rendent possible le vol multirotor. Bon vol !
Références et lectures complémentaires
- Moteurs de drone : sélection, performance et optimisation
- Hélices de drone : sélection, performance et optimisation
- Cadres de drone : tailles, matériaux et sélection
- Contrôleurs de vol de drone : principes et fonctionnement
- Amortissement des vibrations de drone


