Teoría de Vuelo de Drones: Física y Principios del Vuelo Multirrotor
Comprender los principios teóricos detrás del vuelo de drones es esencial para los pilotos que quieren dominar su oficio, solucionar problemas y optimizar el rendimiento. Después de años de estudiar la dinámica de vuelo y construir innumerables drones, he descubierto que una sólida comprensión de la teoría de vuelo puede transformar a un buen piloto en uno excepcional. Esta guía completa te llevará a través de la física y los principios que hacen posible el vuelo de multirotores.
Introducción a la Teoría de Vuelo de Multirotores
Los multirotores representan una categoría única de aeronaves que difieren fundamentalmente de los aviones tradicionales de ala fija y los helicópteros. Su capacidad para volar estacionariamente, maniobrar con precisión y hacer la transición entre varios modos de vuelo los hace versátiles, pero también introduce una dinámica de vuelo compleja.
La Diferencia Fundamental
A diferencia de las aeronaves de ala fija que generan sustentación a través de perfiles aerodinámicos que se mueven a través del aire, o los helicópteros tradicionales que utilizan sistemas mecánicos complejos como platos oscilantes para controlar un rotor principal:
- Los multirotores utilizan múltiples hélices de paso fijo
- Logran el control a través del empuje diferencial entre los motores
- Carecen de la complejidad mecánica de los helicópteros, pero requieren sofisticados sistemas de control electrónico
Este enfoque crea un sistema de vuelo mecánicamente más simple pero electrónica y matemáticamente más complejo.
Física Básica del Vuelo de Multirotores
Las Cuatro Fuerzas
Al igual que todas las aeronaves, los multirotores están sujetos a cuatro fuerzas principales:
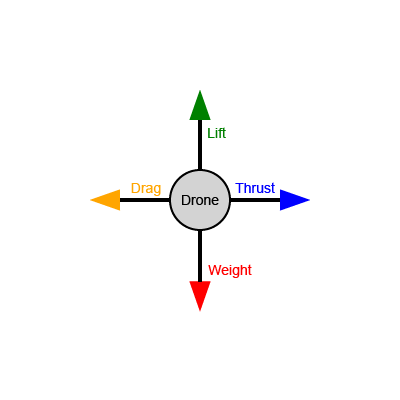
- Sustentación: La fuerza ascendente generada por las hélices
- Directamente proporcional al cuadrado de las RPM de la hélice
- Afectada por el diseño de la hélice, la densidad del aire y la potencia del motor
- Puede ser vectorizada (dirigida) inclinando el dron
- Peso: La fuerza descendente constante debido a la gravedad
- Igual a la masa del dron multiplicada por la aceleración gravitacional
- Actúa a través del centro de gravedad
- Permanece constante independientemente de la orientación del dron
- Resistencia: La fuerza de resistencia que se opone al movimiento a través del aire
- Aumenta con el cuadrado de la velocidad
- Afectada por el perfil aerodinámico del dron
- Actúa en la dirección opuesta al movimiento
- Empuje: La fuerza que propulsa el dron horizontalmente
- Generada al redirigir la fuerza de la hélice mediante inclinación
- Permite el movimiento hacia adelante, hacia atrás y lateral
- Debe superar la resistencia para mantener el movimiento horizontal
Consideración adicional:
- Inercia: Si bien no es una de las cuatro fuerzas fundamentales, afecta la dinámica del dron
- Determinada por la masa del dron y su distribución
- Afecta la rapidez con la que el dron puede cambiar de dirección o velocidad
- Una mayor masa significa mayor estabilidad pero menor agilidad
Generación de Empuje
La ecuación fundamental para el empuje generado por una hélice es:
T = CT × ρ × n² × D⁴
Donde:
- T = Empuje (N)
- CT = Coeficiente de empuje (depende del diseño de la hélice)
- ρ = Densidad del aire (kg/m³)
- n = Velocidad de rotación (revoluciones por segundo)
- D = Diámetro de la hélice (m)
Esta ecuación revela varias ideas importantes:
- El empuje aumenta con el cuadrado de la velocidad de rotación
- El empuje aumenta con la cuarta potencia del diámetro de la hélice
- Las hélices más grandes son significativamente más eficientes que las más pequeñas
- La densidad del aire afecta el empuje (el rendimiento disminuye a mayor altitud)
He observado esta relación de primera mano al probar diferentes tamaños de hélices. Pasar de una hélice de 5" a una de 6" (un aumento del 20% en el diámetro) puede proporcionar teóricamente un aumento del 107% en el empuje a las mismas RPM, aunque las ganancias del mundo real suelen ser menores debido a las limitaciones del motor.
Principios de Configuración y Control de Multirotores
Configuraciones Comunes
Los multirotores vienen en varias configuraciones, cada una con características únicas:
- Tricóptero: Tres motores, requiere un servo para el control de guiñada
- Cuadricóptero: Cuatro motores, la configuración más común
- Configuración en "X" (los motores forman un patrón en X)
- Configuración en "+" (los motores forman un patrón en +)
- Hexacóptero: Seis motores, mayor capacidad de carga y redundancia
- Octocóptero: Ocho motores, máxima capacidad de carga y redundancia
El cuadricóptero se ha convertido en el estándar para la mayoría de las aplicaciones debido a su equilibrio óptimo de simplicidad, eficiencia y autoridad de control.
Patrones de Rotación del Motor
Para que un multirotor mantenga un vuelo estable, los motores deben girar en direcciones opuestas para contrarrestar los efectos del par:
En un cuadricóptero típico:
- Los motores diagonales giran en la misma dirección
- Los motores adyacentes giran en direcciones opuestas
- Este patrón equilibra las fuerzas de par durante el vuelo estacionario
- También proporciona la autoridad de control necesaria para las maniobras
Los Seis Grados de Libertad
Los multirotores operan con seis grados de libertad (6DOF), que representan todas las formas posibles en que la aeronave puede moverse en el espacio tridimensional:
- Traslación a lo largo de tres ejes:
- Acelerador/Altitud (eje Z): Controlado aumentando o disminuyendo todos los motores por igual
- Adelante/Atrás (eje Y): Controlado inclinando el dron (inclinación hacia adelante/atrás)
- Izquierda/Derecha (eje X): Controlado balanceando el dron (inclinación hacia la izquierda/derecha)
- Rotación alrededor de tres ejes:
- Cabeceo: Rotación alrededor del eje X (morro arriba/abajo)
- Balanceo: Rotación alrededor del eje Y (inclinación izquierda/derecha)
- Guiñada: Rotación alrededor del eje Z (girar en sentido horario/antihorario)
Mecanismos de Control
El controlador de vuelo logra el control variando la velocidad de los motores individuales:
Control de Aceleración
- Todos los motores aumentan o disminuyen la velocidad por igual
- Controla directamente la aceleración vertical
- En vuelo estacionario estable, el empuje total es igual al peso
Control de Cabeceo
- Los motores delanteros disminuyen mientras que los traseros aumentan (o viceversa)
- Crea un torque alrededor del eje Y
- Resulta en inclinación hacia adelante o hacia atrás y el consiguiente movimiento
Control de Alabeo
- Los motores izquierdos disminuyen mientras que los derechos aumentan (o viceversa)
- Crea un torque alrededor del eje X
- Resulta en inclinación hacia la izquierda o derecha y el consiguiente movimiento
Control de Guiñada
- Los motores en sentido horario aumentan mientras que los motores en sentido antihorario disminuyen (o viceversa)
- Crea un torque neto alrededor del eje Z
- Resulta en rotación en sentido horario o antihorario
He descubierto que comprender estos mecanismos de control es crucial para diagnosticar problemas de vuelo. Por ejemplo, si tu dron se desvía hacia la derecha a pesar de un ajuste de nivel, podría indicar un problema de calibración, un desequilibrio de potencia del motor o incluso una sutil curvatura del marco que afecta el equilibrio de empuje izquierda-derecha.
Dinámica de Vuelo y Estabilidad
Estabilidad Estática vs. Dinámica
Los multirrotores exhiben diferentes características de estabilidad:
- Estabilidad Estática: La tendencia a volver al equilibrio cuando se perturba
- Los multirrotores son inherentemente inestables estáticamente sin asistencia electrónica
- El centro de gravedad debajo del plano de la hélice mejora la estabilidad estática
- Estabilidad Dinámica: La tendencia de las oscilaciones a amortiguarse con el tiempo
- Afectada por el ajuste PID y el rendimiento del bucle de control
- Influenciada por la rigidez del marco y la distribución de masa
A diferencia de las aeronaves de ala fija que pueden diseñarse con estabilidad inherente, los multirrotores dependen completamente de la estabilización electrónica activa.
Momentos de Inercia
La distribución de masa de un dron afecta significativamente sus características de vuelo:
- Momento de Inercia: Resistencia a la aceleración angular alrededor de un eje
- Masa Centralizada: Menor momento de inercia, más sensible a las entradas de control
- Masa Distribuida: Mayor momento de inercia, más estable pero menos sensible
Es por eso que los drones de carreras típicamente tienen diseños compactos y centralizados para máxima agilidad, mientras que las plataformas de fotografía a menudo tienen un peso más distribuido para un movimiento más suave.
El Efecto Péndulo
La posición del centro de gravedad en relación con el plano de la hélice crea un efecto de péndulo:
- CG debajo del plano de la hélice: Crea un efecto de péndulo autocorrectivo
- CG en el plano de la hélice: Estabilidad neutral, más sensible
- CG por encima del plano de la hélice: Péndulo invertido, muy inestable
La mayoría de los drones están diseñados con la batería montada debajo del marco para bajar el CG y mejorar la estabilidad. He experimentado con diferentes posiciones de batería y descubrí que elevar la batería más cerca del plano de la hélice aumenta la agilidad pero requiere más habilidad del piloto y un mejor ajuste.
Sistemas de Control y Controladores de Vuelo
El Bucle de Control
Los controladores de vuelo modernos utilizan un sistema de control de retroalimentación:

- Punto de ajuste: El estado deseado (desde las entradas del receptor)
- Retroalimentación: El estado real (desde los sensores)
- Error: La diferencia entre el punto de ajuste y la retroalimentación
- Controlador: Calcula las salidas para minimizar el error
- Planta: El propio dron, respondiendo a las salidas
- Sensores: Miden el estado del dron para proporcionar retroalimentación
Este sistema de bucle cerrado se ejecuta cientos de veces por segundo para mantener la estabilidad.
Control PID
El algoritmo de control más común utilizado en los controladores de vuelo es PID (Proporcional-Integral-Derivativo):
- Proporcional (P): Responde proporcionalmente al error actual
- Mayor P: Respuesta más agresiva, potencial de oscilación
- Menor P: Respuesta más suave, potencial de lentitud
- Integral (I): Responde al error acumulado a lo largo del tiempo
- Mayor I: Mejor para corregir errores persistentes, potencial de sobreimpulso
- Menor I: Menos sobreimpulso, puede no corregir completamente los errores
- Derivativo (D): Responde a la tasa de cambio del error
- Mayor D: Mejor amortiguación de oscilaciones, sensible al ruido
- Menor D: Menos sensible al ruido, puede permitir oscilaciones

El ajuste adecuado del PID es esencial para un rendimiento óptimo de vuelo. Normalmente comienzo con los términos P para obtener un comportamiento sensible pero no oscilante, luego agrego I para eliminar la deriva y finalmente agrego D para amortiguar cualquier oscilación restante.
Giroscopios y Acelerómetros
Los sensores principales en un controlador de vuelo son:
- Giroscopio: Mide la velocidad angular alrededor de cada eje
- Sensor principal para estabilización
- Alta tasa de actualización (8kHz+)
- Sujeto a deriva con el tiempo
- Acelerómetro: Mide la aceleración lineal, incluida la gravedad
- Utilizado para referencia de horizonte
- Menor tasa de actualización que el giroscopio
- Afectado por la aceleración del dron
El controlador de vuelo fusiona los datos de estos sensores para determinar la actitud y el movimiento del dron.
Filtros Complementarios y de Kalman
Para superar las limitaciones de los sensores individuales, los controladores de vuelo utilizan algoritmos de fusión de sensores:
- Filtro complementario: Enfoque simple que combina datos del giroscopio y acelerómetro
- Datos del giroscopio para precisión a corto plazo
- Datos del acelerómetro para referencia a largo plazo
- Computacionalmente eficiente
- Filtro de Kalman: Enfoque más sofisticado
- Predicción estadística del estado real
- Tiene en cuenta el ruido y la incertidumbre de los sensores
- Más intensivo computacionalmente
Estos filtros proporcionan una estimación más precisa de la actitud del dron que la que podría proporcionar un solo sensor.
Conceptos avanzados de vuelo
Relación empuje-peso
La relación empuje-peso (TWR) es una métrica crítica para el rendimiento de los drones:
- TWR < 1: No puede despegar
- TWR ≈ 1-1.5: Vuelo lento y estable (plataformas de fotografía)
- TWR ≈ 2-3: Rendimiento equilibrado (drones estilo libre)
- TWR ≈ 4-7: Alto rendimiento (drones de carreras)
- TWR > 7: Extremadamente agresivo (carreras/estilo libre especializados)
Un TWR más alto proporciona:
- Mejor aceleración
- Ángulos de ascenso más pronunciados
- Maniobras más agresivas
- Distancias de frenado más cortas
- Mayor resistencia al viento
Sin embargo, también resulta en:
- Tiempo de vuelo reducido
- Control más desafiante
- Mayores requisitos de potencia
Carga del disco de la hélice
La carga del disco es la relación entre el peso y el área total barrida por las hélices:
- Baja carga del disco: Más eficiente, mejor rendimiento de vuelo estacionario
- Alta carga del disco: Menos eficiente, mejor para vuelo hacia adelante
Este concepto explica por qué las hélices más grandes son más eficientes para el vuelo estacionario y por qué aumentar el tamaño de las hélices a menudo produce un mejor tiempo de vuelo que aumentar la capacidad de la batería.
Par del motor e inercia de la hélice
La interacción entre el par del motor y la inercia de la hélice afecta la respuesta del acelerador:
- Par del motor: Capacidad para cambiar las RPM rápidamente
- Los motores de mayor KV generalmente tienen menor par
- Los volúmenes de estator más grandes proporcionan más par
- Inercia de la hélice: Resistencia a cambios de RPM
- Las hélices más grandes tienen mayor inercia
- Las hélices más pesadas tienen mayor inercia
La relación entre el par del motor y la inercia de la hélice determina la capacidad de respuesta del acelerador. Es por eso que los drones de carreras a menudo usan hélices más pequeñas y livianas con motores de alto par para una máxima capacidad de respuesta.
Linealidad y resolución del acelerador
La relación entre la entrada del acelerador y la salida de empuje no es lineal:
- El empuje aumenta con el cuadrado de las RPM del motor
- Esto crea una respuesta no lineal del acelerador
- Los protocolos digitales como DShot ayudan a mejorar la resolución
- Los controladores de vuelo modernos implementan curvas de aceleración para linealizar la respuesta
Comprender esta no linealidad es crucial para un control preciso del acelerador, especialmente en escenarios de vuelo de proximidad y carreras.
Efecto suelo
Cuando se vuela cerca de una superficie, los drones experimentan el efecto suelo:
- Mayor eficiencia al volar estacionario dentro de ~1 diámetro de hélice de una superficie
- Creado por la amortiguación del aire entre las hélices y la superficie
- Puede causar una elevación inesperada al despegar o aterrizar
- Más pronunciado con hélices más grandes
He notado que este efecto es particularmente fuerte con drones cinematográficos que usan hélices grandes, a veces haciéndolos "rebotar" durante los intentos de aterrizaje si el acelerador no se reduce adecuadamente.
Modos de vuelo y algoritmos de control
Modo de velocidad vs. Autonivelación
Los controladores de vuelo modernos ofrecen diferentes modos de control:
- Modo de velocidad (Acro/Manual):
- El controlador solo estabiliza las velocidades de rotación
- El dron mantendrá su actitud cuando los sticks estén centrados
- Permite una completa libertad de movimiento, incluido el vuelo invertido
- Preferido por pilotos de estilo libre y carreras
- Modos de autonivelación (Ángulo/Horizonte):
- El controlador trabaja activamente para mantener una orientación nivelada
- El dron vuelve a nivelarse cuando los sticks están centrados
- Ángulo de inclinación máximo limitado
- Más fácil para principiantes y fotografía aérea
La diferencia clave es que el modo de velocidad controla la velocidad angular, mientras que los modos de autonivelación controlan el ángulo absoluto.
Protección de la envolvente de vuelo
Algunos controladores de vuelo implementan límites para evitar situaciones peligrosas:
- Límites de ángulo: Evitan una inclinación excesiva que podría causar pérdida de altitud
- Límites de potencia: Evitan daños a la batería por un consumo excesivo de corriente
- Límites de velocidad: Restringen la velocidad máxima por seguridad
- Geovallado: Evita volar en áreas restringidas o más allá de una distancia establecida
Estas protecciones son más comunes en drones comerciales y de fotografía que en modelos de carreras/estilo libre.
Algoritmos de control avanzados
Más allá del PID básico, los controladores de vuelo avanzados implementan:
- Prealimentación: Anticipa las necesidades de control basándose en la entrada del stick
- Filtros de muesca dinámicos: Identifica y filtra automáticamente las frecuencias resonantes
- Anti-gravedad: Compensa los cambios de empuje durante los ajustes rápidos del acelerador
- Modo aire: Mantiene la autoridad durante las maniobras de aceleración cero
Estos algoritmos mejoran significativamente el rendimiento de vuelo, particularmente en maniobras extremas y escenarios de carreras.
Factores ambientales que afectan el vuelo
Densidad del aire y altitud
La densidad del aire afecta directamente el rendimiento de la hélice:
- Mayor densidad (menor altitud, aire más frío): Más empuje, mejor eficiencia
- Menor densidad (mayor altitud, aire más cálido): Menos empuje, eficiencia reducida
A 5000 pies sobre el nivel del mar, un dron podría perder del 10 al 15% de su empuje en comparación con el rendimiento a nivel del mar. He experimentado esto de primera mano al volar en ubicaciones montañosas, donde los drones se sienten notablemente menos potentes y receptivos.
Viento y turbulencia
El viento crea desafíos complejos para el vuelo de drones:
- Viento constante: Requiere corrección constante para mantener la posición
- Viento racheado: Perturbaciones impredecibles que requieren una respuesta rápida
- Turbulencia: Movimiento caótico del aire, especialmente alrededor de obstáculos
- Gradiente de viento: La velocidad del viento aumenta con la altura sobre el suelo
Los controladores de vuelo modernos pueden compensar el viento hasta cierto punto, pero comprender los patrones y limitaciones del viento es esencial para un vuelo seguro.
Efectos de la temperatura
La temperatura afecta múltiples aspectos del rendimiento de los drones:
- Motores: Las temperaturas más altas reducen la eficiencia y la potencia máxima
- Baterías: El frío reduce la capacidad y el voltaje; el calor aumenta la resistencia interna
- Electrónica: Las temperaturas extremas pueden afectar la calibración del sensor
- Densidad del aire: Las temperaturas más altas reducen la densidad del aire y el empuje
He descubierto que el rendimiento en condiciones muy frías (bajo cero) puede caer entre un 20 y un 30% en comparación con las temperaturas óptimas, principalmente debido a las limitaciones de la batería.
Preguntas frecuentes: Preguntas comunes sobre la teoría del vuelo de drones
¿Cómo mantienen los drones la estabilidad sin un rotor de cola como los helicópteros?
A diferencia de los helicópteros que utilizan un rotor de cola para contrarrestar el par del rotor principal, los multirrotores utilizan hélices contrarrotantes. En un cuadricóptero, dos motores giran en sentido horario y dos en sentido antihorario, equilibrando las fuerzas de torsión. Este diseño elimina la necesidad de un rotor de cola y simplifica significativamente el sistema mecánico. El controlador de vuelo ajusta constantemente las velocidades individuales de los motores para mantener la orientación deseada.
¿Cuál es la diferencia entre los motores con escobillas y sin escobillas en términos de dinámica de vuelo?
Los motores sin escobillas proporcionan mayores relaciones potencia-peso, mejor eficiencia y tiempos de respuesta más rápidos en comparación con los motores con escobillas. Desde una perspectiva de dinámica de vuelo, los motores sin escobillas ofrecen:
- Control más preciso debido a una aceleración/desaceleración más rápida
- Mayor empuje máximo para un mejor rendimiento
- Rendimiento más consistente a lo largo del ciclo de descarga de la batería
- Menor momento de inercia en el conjunto giratorio
Estas ventajas se traducen en características de vuelo más receptivas y un mejor rendimiento general, por lo que prácticamente todos los drones de alto rendimiento utilizan motores sin escobillas.
¿Cómo afecta el voltaje de la batería a las características de vuelo?
El voltaje de la batería tiene varios efectos en el vuelo:
- Un voltaje más alto permite que los motores giren más rápido, aumentando el empuje máximo
- La caída de voltaje bajo carga afecta la potencia disponible durante maniobras agresivas
- El voltaje disminuye a medida que la batería se descarga, reduciendo gradualmente el rendimiento
- Los diferentes sistemas de voltaje (3S, 4S, 6S) requieren una selección apropiada de KV del motor
Los controladores de vuelo modernos implementan compensación de voltaje para mantener características de vuelo consistentes a lo largo del ciclo de descarga de la batería, pero el rendimiento máximo aún disminuirá a medida que el voltaje baje.
¿Por qué los drones de carreras usan ángulos de inclinación tan altos?
Los drones de carreras a menudo vuelan en ángulos de inclinación hacia adelante extremos (30-60°) por varias razones:
- Para dirigir más empuje hacia adelante para aceleración y velocidad
- Para reducir el área frontal y minimizar la resistencia
- Para mantener la línea de visión con las puertas/obstáculos de la carrera debajo
El ángulo de inclinación eficiente máximo depende de la relación empuje-peso. Un dron necesita una relación empuje-peso de al menos 1.15 para volar estacionario en un ángulo de 30°, 1.41 para volar estacionario a 45° y 2.0 para volar estacionario a 60°. Los drones de carreras típicamente tienen relaciones empuje-peso de 4-7+ para permitir estos ángulos extremos mientras mantienen la capacidad de altitud y aceleración.
¿Cómo afectan la altitud y la densidad del aire al rendimiento del dron?
A medida que aumenta la altitud, la densidad del aire disminuye, lo que reduce la eficiencia de la hélice. Esto afecta a los drones de varias maneras:
- Empuje máximo reducido (típicamente 3-4% por cada 1000 pies de elevación)
- Disminución de la autoridad de control y la capacidad de respuesta
- Temperaturas más altas del motor debido a menos enfriamiento
- Tiempos de vuelo potencialmente más cortos debido a que los motores trabajan más
Cuando se vuela a grandes altitudes, es recomendable usar hélices más grandes, baterías de mayor capacidad y patrones de vuelo más conservadores para compensar estos efectos.
¿Qué causa las oscilaciones de propwash y cómo se pueden minimizar?
Las oscilaciones de propwash ocurren cuando un dron vuela a través del aire turbulento creado por sus propias hélices, típicamente durante cambios rápidos de dirección o descensos. Este flujo de aire perturbado reduce la eficiencia de la hélice y crea fuerzas impredecibles que el controlador de vuelo debe compensar.
Para minimizar el propwash:
- Ajuste los valores PID apropiadamente, particularmente los términos D
- Use filtrado dinámico para adaptarse a las condiciones cambiantes
- Implemente características avanzadas del controlador de vuelo como la mitigación de propwash
- Adopte técnicas de vuelo que minimicen las transiciones rápidas a través del aire perturbado
- Considere diseños de marco que separen más las hélices o utilicen conductos
¿Cómo afecta la distribución del peso a las características de vuelo?
La distribución del peso determina los momentos de inercia del dron alrededor de cada eje, lo que afecta directamente la rapidez con la que puede cambiar de orientación:
- La masa centralizada (menor momento de inercia) permite velocidades de rotación más rápidas
- La masa distribuida (mayor momento de inercia) proporciona un movimiento más estable y suave
- La distribución asimétrica del peso puede causar un manejo inconsistente entre los ejes
Los drones de carreras típicamente centralizan la masa para una agilidad máxima, mientras que las plataformas de fotografía distribuyen el peso de manera más uniforme para un movimiento más suave y una mejor estabilidad.
¿Cuál es la relación entre el KV del motor, el voltaje y el tamaño de la hélice?
Estos tres factores deben equilibrarse para un rendimiento óptimo:
- El KV del motor determina las RPM por voltio (por ejemplo, un motor de 2400KV en 4S girará a aproximadamente 35,520 RPM sin carga)
- Los motores de mayor KV funcionan mejor con hélices más pequeñas y voltajes más bajos
- Los motores de menor KV funcionan mejor con hélices más grandes y voltajes más altos
La combinación ideal proporciona el empuje deseado mientras mantiene los motores dentro de su rango de funcionamiento eficiente. Como regla general:
- Hélices de 5": 1800-2600KV en 4S, 1300-1700KV en 6S
- Hélices de 6": 1600-1900KV en 4S, 1100-1400KV en 6S
- Hélices de 7": 1300-1600KV en 4S, 900-1200KV en 6S
¿Cómo afectan los filtros del giroscopio al rendimiento del vuelo?
Los filtros del giroscopio eliminan el ruido de los datos del sensor pero introducen latencia:
- Más filtrado proporciona un funcionamiento más suave pero una respuesta más lenta
- Menos filtrado proporciona una respuesta más rápida pero puede permitir que el ruido afecte el control
- Los filtros dinámicos se ajustan automáticamente a las condiciones actuales
El equilibrio óptimo de filtrado depende de la aplicación:
- Carreras: Filtrado mínimo para máxima capacidad de respuesta
- Estilo libre: Filtrado moderado para una respuesta limpia sin oscilaciones
- Fotografía: Mayor filtrado para un movimiento suave y predecible
¿Qué causa la caída de voltaje de la batería y cómo afecta al vuelo?
La caída de voltaje ocurre cuando una batería no puede mantener su voltaje bajo carga debido a la resistencia interna:
- Más pronunciado con baterías más antiguas o de menor calidad
- Empeora a medida que la batería se descarga
- Aumenta con un mayor consumo de corriente (vuelo agresivo)
Esta caída de voltaje reduce la potencia disponible y puede causar:
- Empuje máximo reducido durante maniobras de alto acelerador
- Características de vuelo inconsistentes
- Advertencias prematuras de bajo voltaje
- Posible pérdida de control si es grave
El uso de baterías con clasificaciones C apropiadas para su estilo de vuelo y la implementación de limitación del acelerador a medida que las baterías se descargan pueden ayudar a controlar estos efectos.
Conclusión
Comprender los principios teóricos detrás del vuelo de multirrotores proporciona una base para convertirse en un piloto, constructor y solucionador de problemas más hábil. Si bien los controladores de vuelo modernos manejan los cálculos complejos necesarios para un vuelo estable, saber cómo y por qué los drones se comportan como lo hacen le permite:
- Tome decisiones informadas sobre los componentes según sus necesidades específicas
- Ajuste su dron para un rendimiento óptimo
- Diagnostique y resuelva problemas de vuelo
- Vuele con mayor precisión y confianza
- Empuje los límites de lo que es posible con aeronaves multirrotor
El campo de la tecnología de drones continúa evolucionando rápidamente, con avances en motores, baterías, algoritmos de control y materiales que amplían constantemente la envolvente de rendimiento. Al comprender los principios fundamentales cubiertos en esta guía, estará bien equipado para evaluar y aprovechar estas innovaciones en su propio vuelo.
Ya sea que esté construyendo su primer dron o el centésimo, espero que esta guía ayude a profundizar su comprensión de la fascinante física e ingeniería que hacen posible el vuelo multirrotor. ¡Feliz vuelo!
Referencias y lectura adicional
- Motores de drones: selección, rendimiento y optimización
- Hélices de drones: selección, rendimiento y optimización
- Marcos de drones: tamaños, materiales y selección
- Controladores de vuelo de drones: principios y funcionamiento
- Amortiguación de vibraciones de drones


