Drohnen-Flugtheorie: Physik und Prinzipien des Multikopter-Flugs
Das Verständnis der theoretischen Prinzipien hinter dem Drohnenflug ist für Piloten, die ihr Handwerk meistern, Probleme beheben und die Leistung optimieren möchten, unerlässlich. Nach jahrelangem Studium der Flugdynamik und dem Bau unzähliger Drohnen habe ich festgestellt, dass ein solides Verständnis der Flugtheorie einen guten Piloten in einen außergewöhnlichen verwandeln kann. Dieser umfassende Leitfaden führt Sie durch die Physik und Prinzipien, die den Multirotor-Flug ermöglichen.
Einführung in die Multirotor-Flugtheorie
Multirotoren stellen eine einzigartige Kategorie von Fluggeräten dar, die sich grundlegend von herkömmlichen Starrflügelflugzeugen und Hubschraubern unterscheiden. Ihre Fähigkeit zu schweben, präzise zu manövrieren und zwischen verschiedenen Flugmodi zu wechseln, macht sie vielseitig, führt aber auch zu einer komplexen Flugdynamik.
Der grundlegende Unterschied
Im Gegensatz zu Starrflügelflugzeugen, die Auftrieb durch Tragflächen erzeugen, die sich durch die Luft bewegen, oder traditionellen Hubschraubern, die komplexe mechanische Systeme wie Taumelscheiben zur Steuerung eines Hauptrotors verwenden:
- Multirotoren verwenden mehrere Propeller mit festem Anstellwinkel
- Sie erreichen die Steuerung durch unterschiedlichen Schub zwischen den Motoren
- Ihnen fehlt die mechanische Komplexität von Hubschraubern, aber sie benötigen hochentwickelte elektronische Steuerungssysteme
Dieser Ansatz schafft ein mechanisch einfacheres, aber elektronisch und mathematisch komplexeres Flugsystem.
Grundlegende Physik des Multirotor-Flugs
Die vier Kräfte
Wie alle Fluggeräte unterliegen Multirotoren vier Hauptkräften:
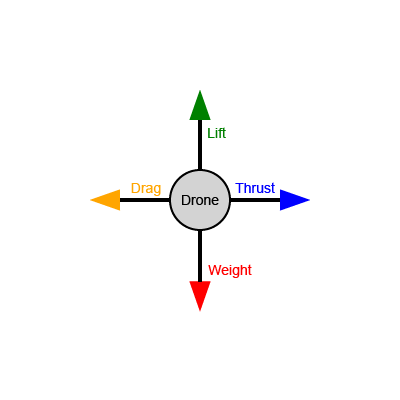
- Auftrieb: Die von den Propellern erzeugte Aufwärtskraft
- Direkt proportional zum Quadrat der Propeller-Drehzahl
- Beeinflusst durch Propellerdesign, Luftdichte und Motorleistung
- Kann durch Neigen der Drohne gelenkt werden
- Gewicht: Die konstante Abwärtskraft aufgrund der Schwerkraft
- Entspricht der Masse der Drohne multipliziert mit der Erdbeschleunigung
- Wirkt durch den Schwerpunkt
- Bleibt unabhängig von der Ausrichtung der Drohne konstant
- Luftwiderstand: Die Widerstandskraft, die der Bewegung durch die Luft entgegenwirkt
- Nimmt mit dem Quadrat der Geschwindigkeit zu
- Beeinflusst durch das aerodynamische Profil der Drohne
- Wirkt in die entgegengesetzte Richtung der Bewegung
- Schub: Die Kraft, die die Drohne horizontal antreibt
- Erzeugt durch Umlenken der Propellerkraft durch Neigung
- Ermöglicht Vorwärts-, Rückwärts- und Seitwärtsbewegung
- Muss den Luftwiderstand überwinden, um die horizontale Bewegung aufrechtzuerhalten
Zusätzliche Überlegung:
- Trägheit: Obwohl sie nicht zu den vier Grundkräften gehört, beeinflusst sie die Drohnendynamik
- Bestimmt durch die Masse der Drohne und deren Verteilung
- Beeinflusst, wie schnell die Drohne die Richtung oder Geschwindigkeit ändern kann
- Höhere Masse bedeutet größere Stabilität, aber geringere Wendigkeit
Schuberzeugung
Die grundlegende Gleichung für den von einem Propeller erzeugten Schub lautet:
T = CT × ρ × n² × D⁴
Wobei:
- T = Schub (N)
- CT = Schubbeiwert (abhängig vom Propellerdesign)
- ρ = Luftdichte (kg/m³)
- n = Drehzahl (Umdrehungen pro Sekunde)
- D = Propellerdurchmesser (m)
Diese Gleichung offenbart mehrere wichtige Erkenntnisse:
- Der Schub nimmt mit dem Quadrat der Drehzahl zu
- Der Schub nimmt mit der vierten Potenz des Propellerdurchmessers zu
- Größere Propeller sind deutlich effizienter als kleinere
- Die Luftdichte beeinflusst den Schub (die Leistung nimmt in größeren Höhen ab)
Ich habe diese Beziehung aus erster Hand beobachtet, als ich verschiedene Propellergrößen getestet habe. Der Wechsel von einem 5-Zoll- zu einem 6-Zoll-Propeller (eine Durchmessererhöhung um 20 %) kann theoretisch eine Schubsteigerung von 107 % bei gleicher Drehzahl bewirken, obwohl die realen Zugewinne aufgrund von Motorbegrenzungen in der Regel geringer ausfallen.
Multirotor-Konfiguration und Steuerungsprinzipien
Gängige Konfigurationen
Multirotoren gibt es in verschiedenen Konfigurationen, die jeweils einzigartige Eigenschaften aufweisen:
- Trikopter: Drei Motoren, benötigt ein Servo für die Giersteuerung
- Quadrokopter: Vier Motoren, die häufigste Konfiguration
- "X"-Konfiguration (Motoren bilden ein X-Muster)
- "+"-Konfiguration (Motoren bilden ein +-Muster)
- Hexakopter: Sechs Motoren, größere Tragfähigkeit und Redundanz
- Oktokopter: Acht Motoren, maximale Tragfähigkeit und Redundanz
Der Quadrokopter ist aufgrund seiner optimalen Balance zwischen Einfachheit, Effizienz und Steuerfähigkeit zum Standard für die meisten Anwendungen geworden.
Motordrehmuster
Damit ein Multirotor einen stabilen Flug aufrechterhalten kann, müssen sich die Motoren in entgegengesetzten Richtungen drehen, um Drehmomenteffekte auszugleichen:
Bei einem typischen Quadrokopter:
- Diagonale Motoren drehen sich in die gleiche Richtung
- Benachbarte Motoren drehen sich in entgegengesetzte Richtungen
- Dieses Muster gleicht die Drehmomente während des Schwebens aus
- Es bietet auch die notwendige Steuerfähigkeit für Manöver
Die sechs Freiheitsgrade
Multirotoren arbeiten mit sechs Freiheitsgraden (6DOF), die alle möglichen Bewegungen des Fluggeräts im dreidimensionalen Raum darstellen:
- Translation entlang von drei Achsen:
- Gas/Höhe (Z-Achse): Gesteuert durch gleichmäßiges Erhöhen oder Verringern aller Motoren
- Vorwärts/Rückwärts (Y-Achse): Gesteuert durch Nicken der Drohne (Neigen nach vorne/hinten)
- Links/Rechts (X-Achse): Gesteuert durch Rollen der Drohne (Neigen nach links/rechts)
- Rotation um drei Achsen:
- Nicken: Rotation um die X-Achse (Nase hoch/runter)
- Rollen: Rotation um die Y-Achse (Neigung nach links/rechts)
- Gieren: Rotation um die Z-Achse (Drehung im/gegen den Uhrzeigersinn)
Steuerungsmechanismen
Der Flugcontroller erreicht die Steuerung durch Veränderung der Drehzahl einzelner Motoren:
Schubkontrolle
- Alle Motoren erhöhen oder verringern die Drehzahl gleichmäßig
- Steuert direkt die vertikale Beschleunigung
- Im stabilen Schwebeflug entspricht der Gesamtschub dem Gewicht
Nickkontrolle
- Vordere Motoren verringern die Drehzahl, während hintere Motoren sie erhöhen (oder umgekehrt)
- Erzeugt ein Drehmoment um die Y-Achse
- Führt zu einer Neigung nach vorne oder hinten und anschließender Bewegung
Rollkontrolle
- Linke Motoren verringern die Drehzahl, während rechte Motoren sie erhöhen (oder umgekehrt)
- Erzeugt ein Drehmoment um die X-Achse
- Führt zu einer Neigung nach links oder rechts und anschließender Bewegung
Gierkontrolle
- CW-Motoren erhöhen die Drehzahl, während CCW-Motoren sie verringern (oder umgekehrt)
- Erzeugt ein Nettodrehmoment um die Z-Achse
- Führt zu einer Drehung im Uhrzeigersinn oder gegen den Uhrzeigersinn
Ich habe festgestellt, dass das Verständnis dieser Kontrollmechanismen entscheidend für die Diagnose von Flugproblemen ist. Wenn Ihre Drohne beispielsweise trotz ebener Trimmung nach rechts driftet, könnte dies auf ein Kalibrierungsproblem, ein Ungleichgewicht der Motorleistung oder sogar eine subtile Rahmenverbiegung hindeuten, die das Gleichgewicht des Schubs von links nach rechts beeinträchtigt.
Flugdynamik und Stabilität
Statische vs. dynamische Stabilität
Multikopter weisen unterschiedliche Stabilitätseigenschaften auf:
- Statische Stabilität: Die Tendenz, bei Störungen zum Gleichgewicht zurückzukehren
- Multikopter sind ohne elektronische Unterstützung von Natur aus statisch instabil
- Ein Schwerpunkt unterhalb der Propellerebene verbessert die statische Stabilität
- Dynamische Stabilität: Die Tendenz, dass Schwingungen mit der Zeit gedämpft werden
- Beeinflusst durch PID-Tuning und Regelkreisleistung
- Beeinflusst durch Rahmensteifigkeit und Massenverteilung
Im Gegensatz zu Starrflügelflugzeugen, die mit inhärenter Stabilität konstruiert werden können, sind Multikopter vollständig auf eine aktive elektronische Stabilisierung angewiesen.
Trägheitsmomente
Die Massenverteilung einer Drohne beeinflusst ihre Flugeigenschaften erheblich:
- Trägheitsmoment: Widerstand gegen Winkelbeschleunigung um eine Achse
- Zentralisierte Masse: Geringeres Trägheitsmoment, reaktionsschneller auf Steuereingaben
- Verteilte Masse: Höheres Trägheitsmoment, stabiler aber weniger reaktionsschnell
Aus diesem Grund haben Renndrohnen typischerweise kompakte, zentralisierte Designs für maximale Agilität, während Fotoplattformen oft eine verteilte Masse für sanftere Bewegungen haben.
Der Pendeleffekt
Die Position des Schwerpunkts relativ zur Propellerebene erzeugt einen Pendeleffekt:
- Schwerpunkt unter Propellerebene: Erzeugt einen selbstaufrichtenden Pendeleffekt
- Schwerpunkt in Propellerebene: Neutrale Stabilität, am reaktionsschnellsten
- Schwerpunkt über Propellerebene: Umgekehrtes Pendel, sehr instabil
Die meisten Drohnen sind so konstruiert, dass der Akku unterhalb des Rahmens montiert ist, um den Schwerpunkt abzusenken und die Stabilität zu verbessern. Ich habe mit verschiedenen Akkupositionen experimentiert und festgestellt, dass das Anheben des Akkus näher an die Propellerebene die Agilität erhöht, aber mehr Pilotengeschick und besseres Tuning erfordert.
Steuerungssysteme und Flugsteuerungen
Der Regelkreis
Moderne Flugsteuerungen verwenden ein Regelungssystem mit Rückkopplung:

- Sollwert: Der gewünschte Zustand (von den Empfängereingängen)
- Rückkopplung: Der tatsächliche Zustand (von Sensoren)
- Fehler: Die Differenz zwischen Sollwert und Rückkopplung
- Regler: Berechnet Ausgaben, um den Fehler zu minimieren
- Strecke: Die Drohne selbst, die auf Ausgaben reagiert
- Sensoren: Messen den Zustand der Drohne, um Rückkopplung bereitzustellen
Dieser geschlossene Regelkreis läuft hunderte Male pro Sekunde, um die Stabilität aufrechtzuerhalten.
PID-Regelung
Der am häufigsten verwendete Regelalgorithmus in Flugsteuerungen ist PID (Proportional-Integral-Derivative):
- Proportional (P): Reagiert proportional zum aktuellen Fehler
- Höheres P: Aggressivere Reaktion, Potenzial für Schwingungen
- Niedrigeres P: Sanftere Reaktion, Potenzial für Trägheit
- Integral (I): Reagiert auf den akkumulierten Fehler über die Zeit
- Höheres I: Besser bei der Korrektur von anhaltenden Fehlern, Potenzial für Überschwingen
- Niedrigeres I: Weniger Überschwingen, korrigiert Fehler möglicherweise nicht vollständig
- Derivative (D): Reagiert auf die Änderungsrate des Fehlers
- Höheres D: Bessere Dämpfung von Schwingungen, empfindlich gegenüber Rauschen
- Niedrigeres D: Weniger empfindlich gegenüber Rauschen, lässt möglicherweise Schwingungen zu

Ein korrektes PID-Tuning ist für eine optimale Flugleistung unerlässlich. Ich beginne normalerweise mit P-Termen, um ein reaktionsschnelles, aber nicht schwingendes Verhalten zu erhalten, füge dann I hinzu, um Drift zu eliminieren, und schließlich D, um verbleibende Schwingungen zu dämpfen.
Gyroskope und Beschleunigungsmesser
Die Hauptsensoren in einer Flugsteuerung sind:
- Gyroskop: Misst die Winkelgeschwindigkeit um jede Achse
- Primärsensor für die Stabilisierung
- Hohe Aktualisierungsrate (8kHz+)
- Unterliegt einer Drift im Laufe der Zeit
- Beschleunigungsmesser: Misst die lineare Beschleunigung einschließlich der Schwerkraft
- Wird für die Horizontreferenz verwendet
- Niedrigere Aktualisierungsrate als Gyroskop
- Beeinflusst durch die Beschleunigung der Drohne
Die Flugsteuerung fusioniert Daten von diesen Sensoren, um die Lage und Bewegung der Drohne zu bestimmen.
Komplementär- und Kalman-Filter
Um die Einschränkungen einzelner Sensoren zu überwinden, verwenden Flugsteuerungen Sensorfusionsalgorithmen:
- Komplementärfilter: Einfacher Ansatz, der Gyroskop- und Beschleunigungsmesserdaten kombiniert
- Gyro-Daten für kurzfristige Genauigkeit
- Beschleunigungsmesserdaten als langfristige Referenz
- Rechnerisch effizient
- Kalman-Filter: Anspruchsvollerer Ansatz
- Statistische Vorhersage des tatsächlichen Zustands
- Berücksichtigt Sensorrauschen und Unsicherheit
- Rechenintensiver
Diese Filter liefern eine genauere Schätzung der Drohnenlage als jeder einzelne Sensor.
Fortgeschrittene Flugkonzepte
Schub-Gewichts-Verhältnis
Das Schub-Gewichts-Verhältnis (TWR) ist eine entscheidende Kennzahl für die Drohnenleistung:
- TWR < 1: Kann nicht abheben
- TWR ≈ 1-1,5: Langsamer, stabiler Flug (Fotoplattformen)
- TWR ≈ 2-3: Ausgewogene Leistung (Freestyle-Drohnen)
- TWR ≈ 4-7: Hochleistung (Renndrohnen)
- TWR > 7: Extrem aggressiv (spezialisierte Renn-/Freestyle-Drohnen)
Höheres TWR bietet:
- Bessere Beschleunigung
- Steilere Steigwinkel
- Aggressivere Manöver
- Kürzere Bremswege
- Größere Windresistenz
Es führt jedoch auch zu:
- Reduzierter Flugzeit
- Anspruchsvollerer Steuerung
- Höheren Leistungsanforderungen
Propeller-Scheibenbelastung
Die Scheibenbelastung ist das Verhältnis von Gewicht zur gesamten von den Propellern überstrichenen Fläche:
- Geringe Scheibenbelastung: Effizienter, bessere Schwebeflug-Leistung
- Hohe Scheibenbelastung: Weniger effizient, besser für Vorwärtsflug
Dieses Konzept erklärt, warum größere Propeller effizienter für den Schwebeflug sind und warum eine Vergrößerung der Propeller oft eine bessere Flugzeit ergibt als eine Erhöhung der Akkukapazität.
Motordrehmoment und Propellerträgheit
Das Zusammenspiel von Motordrehmoment und Propellerträgheit beeinflusst das Gasansprechverhalten:
- Motordrehmoment: Fähigkeit, die Drehzahl schnell zu ändern
- Motoren mit höherem KV haben im Allgemeinen ein geringeres Drehmoment
- Größere Statorvolumen bieten mehr Drehmoment
- Propellerträgheit: Widerstand gegen Drehzahländerungen
- Größere Propeller haben eine höhere Trägheit
- Schwerere Propeller haben eine höhere Trägheit
Das Verhältnis zwischen Motordrehmoment und Propellerträgheit bestimmt die Gasansprechempfindlichkeit. Deshalb verwenden Renndrohnen oft kleinere, leichtere Propeller mit hochdrehmomentstarken Motoren für maximale Ansprechempfindlichkeit.
Gaslinearität und -auflösung
Der Zusammenhang zwischen Gaseingabe und Schubausgabe ist nicht linear:
- Der Schub steigt mit dem Quadrat der Motordrehzahl
- Dies erzeugt eine nichtlineare Gasantwort
- Digitale Protokolle wie DShot helfen, die Auflösung zu verbessern
- Moderne Flugsteuerungen implementieren Gaskurven zur Linearisierung der Antwort
Das Verständnis dieser Nichtlinearität ist entscheidend für eine präzise Gassteuerung, insbesondere in Szenarien mit Nähe und Rennen.
Bodeneffekt
Beim Fliegen in Oberflächennähe erfahren Drohnen den Bodeneffekt:
- Erhöhte Effizienz beim Schweben innerhalb von ~1 Propellerdurchmesser einer Oberfläche
- Erzeugt durch Luftpolsterung zwischen Propellern und Oberfläche
- Kann beim Starten oder Landen unerwarteten Auftrieb verursachen
- Ausgeprägter bei größeren Propellern
Ich habe festgestellt, dass dieser Effekt bei Kameradrohnen mit großen Propellern besonders stark ist und manchmal dazu führt, dass sie beim Landeanflug "hüpfen", wenn der Gaseingang nicht entsprechend reduziert wird.
Flugmodi und Steuerungsalgorithmen
Rate-Modus vs. Selbstnivellierung
Moderne Flugsteuerungen bieten verschiedene Steuerungsmodi:
- Rate-Modus (Acro/Manuell):
- Regler stabilisiert nur Rotationsraten
- Drohne hält ihre Lage bei zentrierten Knüppeln
- Ermöglicht vollständige Bewegungsfreiheit einschließlich Rückenflug
- Bevorzugt von Freestyle- und Rennpiloten
- Selbstnivellierende Modi (Winkel/Horizont):
- Regler arbeitet aktiv daran, eine ebene Ausrichtung beizubehalten
- Drohne kehrt bei zentrierten Knüppeln in die Waagerechte zurück
- Begrenzter maximaler Neigungswinkel
- Einfacher für Anfänger und Luftfotografie
Der Hauptunterschied besteht darin, dass der Rate-Modus die Winkelgeschwindigkeit steuert, während selbstnivellierende Modi den absoluten Winkel steuern.
Flugbereichsschutz
Einige Flugsteuerungen implementieren Grenzen, um gefährliche Situationen zu verhindern:
- Winkelbegrenzungen: Verhindern übermäßige Neigung, die zu Höhenverlust führen könnte
- Leistungsgrenzen: Verhindern Batterieschäden durch übermäßige Stromaufnahme
- Geschwindigkeitsbegrenzungen: Beschränken die Höchstgeschwindigkeit aus Sicherheitsgründen
- Geofencing: Verhindern das Fliegen in gesperrten Bereichen oder über eine festgelegte Entfernung hinaus
Diese Schutzmaßnahmen sind bei kommerziellen Drohnen und Fotodrohnen häufiger als bei Renn- und Freestyle-Modellen.
Fortgeschrittene Steuerungsalgorithmen
Über die grundlegende PID-Regelung hinaus implementieren fortschrittliche Flugsteuerungen:
- Vorsteuerung: Antizipiert den Steuerungsbedarf basierend auf der Knüppeleingabe
- Dynamische Kerbfilter: Identifizieren und filtern automatisch Resonanzfrequenzen
- Anti-Schwerkraft: Kompensiert Schubänderungen bei schnellen Gasanpassungen
- Airmode: Behält die Autorität während Manövern mit Nullgas bei
Diese Algorithmen verbessern die Flugleistung erheblich, insbesondere bei extremen Manövern und Rennszenarien.
Umweltfaktoren, die den Flug beeinflussen
Luftdichte und Höhe
Die Luftdichte beeinflusst direkt die Propellerleistung:
- Höhere Dichte (geringere Höhe, kältere Luft): Mehr Schub, bessere Effizienz
- Geringere Dichte (größere Höhe, wärmere Luft): Weniger Schub, geringere Effizienz
In 1500 Metern Höhe über dem Meeresspiegel kann eine Drohne 10-15% ihres Schubs im Vergleich zur Leistung auf Meereshöhe verlieren. Ich habe dies selbst erlebt, wenn ich in Bergregionen geflogen bin, wo sich Drohnen spürbar weniger leistungsfähig und reaktionsschnell anfühlen.
Wind und Turbulenzen
Wind stellt komplexe Herausforderungen für den Drohnenflug dar:
- Gleichmäßiger Wind: Erfordert ständige Korrektur, um die Position zu halten
- Böiger Wind: Unvorhersehbare Störungen, die eine schnelle Reaktion erfordern
- Turbulenzen: Chaotische Luftbewegung, besonders um Hindernisse
- Windgradient: Die Windgeschwindigkeit nimmt mit der Höhe über dem Boden zu
Moderne Flugsteuerungen können Wind bis zu einem gewissen Grad kompensieren, aber das Verständnis von Windmustern und -grenzen ist für sicheres Fliegen unerlässlich.
Temperatureffekte
Die Temperatur beeinflusst mehrere Aspekte der Drohnenleistung:
- Motoren: Höhere Temperaturen verringern Effizienz und maximale Leistung
- Akkus: Kälte reduziert Kapazität und Spannung; Hitze erhöht den Innenwiderstand
- Elektronik: Extreme Temperaturen können die Sensorkalibrierung beeinflussen
- Luftdichte: Höhere Temperaturen verringern die Luftdichte und den Schub
Ich habe festgestellt, dass die Leistung bei sehr kalten Bedingungen (unter dem Gefrierpunkt) im Vergleich zu optimalen Temperaturen um 20-30% sinken kann, hauptsächlich aufgrund von Akkueinschränkungen.
FAQ: Häufige Fragen zur Drohnen-Flugtheorie
Wie halten Drohnen ohne Heckrotor wie bei Hubschraubern ihre Stabilität?
Im Gegensatz zu Hubschraubern, die einen Heckrotor verwenden, um dem Drehmoment des Hauptrotors entgegenzuwirken, verwenden Multikopter gegenläufige Propeller. In einem Quadrokopter drehen sich zwei Motoren im Uhrzeigersinn und zwei gegen den Uhrzeigersinn, wodurch die Drehmomente ausgeglichen werden. Dieses Design macht einen Heckrotor überflüssig und vereinfacht das mechanische System erheblich. Der Flugcontroller passt ständig die Drehzahlen der einzelnen Motoren an, um die gewünschte Ausrichtung beizubehalten.
Was ist der Unterschied zwischen Bürsten- und bürstenlosen Motoren in Bezug auf die Flugdynamik?
Bürstenlose Motoren bieten im Vergleich zu Bürstenmotoren ein höheres Leistungsgewicht, bessere Effizienz und schnellere Reaktionszeiten. Aus Sicht der Flugdynamik bieten bürstenlose Motoren:
- Präzisere Steuerung durch schnellere Beschleunigung/Verzögerung
- Höherer maximaler Schub für bessere Leistung
- Konstantere Leistung über den gesamten Entladezyklus der Batterie
- Geringeres Trägheitsmoment in der rotierenden Baugruppe
Diese Vorteile führen zu einem reaktionsschnelleren Flugverhalten und einer insgesamt besseren Leistung, weshalb praktisch alle Leistungsdrohnen bürstenlose Motoren verwenden.
Wie beeinflusst die Batteriespannung die Flugeigenschaften?
Die Batteriespannung hat mehrere Auswirkungen auf den Flug:
- Eine höhere Spannung ermöglicht es den Motoren, sich schneller zu drehen und den maximalen Schub zu erhöhen
- Der Spannungseinbruch unter Last beeinflusst die verfügbare Leistung bei aggressiven Manövern
- Die Spannung sinkt mit der Entladung der Batterie und reduziert allmählich die Leistung
- Unterschiedliche Spannungssysteme (3S, 4S, 6S) erfordern eine entsprechende Auswahl der Motor-KV
Moderne Flugsteuerungen setzen eine Spannungskompensation ein, um während des gesamten Entladezyklus der Batterie konstante Flugeigenschaften beizubehalten, aber die maximale Leistung wird dennoch mit sinkender Spannung abnehmen.
Warum verwenden Renndrohnen so hohe Neigungswinkel?
Renndrohnen fliegen oft mit extremen Vorwärtsneigungswinkeln (30-60°) aus mehreren Gründen:
- Um mehr Schub nach vorne zu lenken für Beschleunigung und Geschwindigkeit
- Um die Stirnfläche zu reduzieren und den Luftwiderstand zu minimieren
- Um die Sichtverbindung zu den Renntoren/Hindernissen darunter aufrechtzuerhalten
Der maximal effiziente Neigungswinkel hängt vom Schub-Gewichts-Verhältnis ab. Eine Drohne benötigt ein Schub-Gewichts-Verhältnis von mindestens 1,15, um in einem Winkel von 30° zu schweben, 1,41 für 45° und 2,0 für 60°. Renndrohnen haben typischerweise Schub-Gewichts-Verhältnisse von 4-7+, um diese extremen Winkel zu ermöglichen und gleichzeitig die Höhe und Beschleunigungsfähigkeit beizubehalten.
Wie beeinflussen Höhe und Luftdichte die Leistung von Drohnen?
Mit zunehmender Höhe nimmt die Luftdichte ab, was die Effizienz der Propeller verringert. Dies wirkt sich auf Drohnen in mehrfacher Hinsicht aus:
- Reduzierter maximaler Schub (typischerweise 3-4% pro 1000ft Höhe)
- Verringerte Steuerautorität und Reaktionsfähigkeit
- Höhere Motortemperaturen aufgrund geringerer Kühlung
- Potenziell kürzere Flugzeiten, da die Motoren härter arbeiten müssen
Beim Fliegen in großen Höhen ist es ratsam, größere Propeller, Akkus mit höherer Kapazität und konservativere Flugmuster zu verwenden, um diese Effekte auszugleichen.
Was verursacht Propwash-Oszillationen und wie können sie minimiert werden?
Propwash-Oszillationen treten auf, wenn eine Drohne durch die turbulente Luft fliegt, die von ihren eigenen Propellern erzeugt wird, typischerweise bei schnellen Richtungswechseln oder beim Abstieg. Diese gestörte Luftströmung verringert die Effizienz der Propeller und erzeugt unvorhersehbare Kräfte, die der Flugcontroller kompensieren muss.
Um Propwash zu minimieren:
- PID-Werte angemessen einstellen, insbesondere D-Terme
- Dynamische Filterung verwenden, um sich an wechselnde Bedingungen anzupassen
- Fortschrittliche Funktionen des Flugcontrollers wie Propwash-Unterdrückung implementieren
- Flugtechniken anwenden, die schnelle Übergänge durch gestörte Luft minimieren
- Rahmendesigns in Betracht ziehen, die die Propeller weiter trennen oder Kanäle verwenden
Wie beeinflusst die Gewichtsverteilung die Flugeigenschaften?
Die Gewichtsverteilung bestimmt die Trägheitsmomente der Drohne um jede Achse, was sich direkt darauf auswirkt, wie schnell sie ihre Ausrichtung ändern kann:
- Zentralisierte Masse (geringeres Trägheitsmoment) ermöglicht schnellere Rotationsraten
- Verteilte Masse (höheres Trägheitsmoment) sorgt für stabilere, gleichmäßigere Bewegungen
- Asymmetrische Gewichtsverteilung kann zu inkonsistentem Handling zwischen den Achsen führen
Renndrohnen zentralisieren typischerweise die Masse für maximale Agilität, während Fotoplattformen das Gewicht gleichmäßiger verteilen für sanftere Bewegungen und bessere Stabilität.
Was ist der Zusammenhang zwischen Motor-KV, Spannung und Propellergröße?
Diese drei Faktoren müssen für eine optimale Leistung ausbalanciert sein:
- Motor-KV bestimmt die Umdrehungen pro Volt (z.B. dreht sich ein 2400KV-Motor bei 4S mit ca. 35.520 U/min unbelastet)
- Motoren mit höherem KV funktionieren am besten mit kleineren Propellern und niedrigeren Spannungen
- Motoren mit niedrigerem KV funktionieren am besten mit größeren Propellern und höheren Spannungen
Die ideale Kombination liefert den gewünschten Schub und hält die Motoren in ihrem effizienten Betriebsbereich. Als Faustregel gilt:
- 5"-Propeller: 1800-2600KV bei 4S, 1300-1700KV bei 6S
- 6"-Propeller: 1600-1900KV bei 4S, 1100-1400KV bei 6S
- 7"-Propeller: 1300-1600KV bei 4S, 900-1200KV bei 6S
Wie beeinflussen Gyro-Filter die Flugleistung?
Gyro-Filter entfernen Rauschen aus Sensordaten, führen aber zu Latenz:
- Mehr Filterung sorgt für einen sanfteren Betrieb, aber langsamere Reaktion
- Weniger Filterung sorgt für schnellere Reaktion, kann aber zulassen, dass Rauschen die Steuerung beeinflusst
- Dynamische Filter passen sich automatisch an die aktuellen Bedingungen an
Die optimale Filterbalance hängt von der Anwendung ab:
- Rennen: Minimale Filterung für maximale Reaktionsfähigkeit
- Freestyle: Moderate Filterung für saubere Reaktion ohne Oszillationen
- Fotografie: Höhere Filterung für sanfte, vorhersehbare Bewegungen
Was verursacht den Batteriespannungseinbruch und wie wirkt er sich auf den Flug aus?
Spannungseinbruch tritt auf, wenn eine Batterie aufgrund des Innenwiderstands ihre Spannung unter Last nicht halten kann:
- Ausgeprägter bei älteren oder qualitativ minderwertigen Batterien
- Verschlechtert sich mit der Entladung der Batterie
- Nimmt mit höherer Stromaufnahme zu (aggressives Fliegen)
Dieser Spannungsabfall reduziert die verfügbare Leistung und kann Folgendes verursachen:
- Reduzierter maximaler Schub bei Manövern mit hohem Gashebel
- Inkonsistente Flugeigenschaften
- Vorzeitige Unterspannungswarnungen
- Möglicher Kontrollverlust bei starkem Einbruch
Die Verwendung von Batterien mit geeigneten C-Werten für den eigenen Flugstil und die Implementierung einer Gashebelsbegrenzung bei der Entladung der Batterien kann helfen, diese Effekte zu kontrollieren.
Fazit
Das Verständnis der theoretischen Prinzipien hinter dem Multikopter-Flug bietet eine Grundlage, um ein geschickterer Pilot, Erbauer und Problemlöser zu werden. Während moderne Flugsteuerungen die komplexen Berechnungen übernehmen, die für einen stabilen Flug erforderlich sind, ermöglicht das Wissen darüber, wie und warum sich Drohnen so verhalten, wie sie es tun, Folgendes:
- Treffen Sie fundierte Komponentenauswahl für Ihre spezifischen Anforderungen
- Optimieren Sie Ihre Drohne für beste Leistung
- Diagnostizieren und lösen Sie Flugprobleme
- Fliegen Sie mit höherer Präzision und Zuversicht
- Verschieben Sie die Grenzen des Möglichen mit Multirotor-Fluggeräten
Das Feld der Drohnentechnologie entwickelt sich rasant weiter, mit Fortschritten bei Motoren, Batterien, Steuerungsalgorithmen und Materialien, die die Leistungsgrenzen ständig erweitern. Durch das Verständnis der in diesem Leitfaden behandelten Grundprinzipien sind Sie bestens gerüstet, um diese Innovationen in Ihrem eigenen Flugbetrieb zu bewerten und zu nutzen.
Ob Sie Ihre erste oder Ihre hundertste Drohne bauen, ich hoffe, dass dieser Leitfaden Ihr Verständnis für die faszinierende Physik und Technik vertieft, die den Multirotorflug ermöglichen. Frohes Fliegen!
Referenzen und weiterführende Literatur
- Drohnenmotoren: Auswahl, Leistung und Optimierung
- Drohnenpropeller: Auswahl, Leistung und Optimierung
- Drohnen-Frames: Größen, Materialien und Auswahl
- Drohnen-Flugsteuerungen: Prinzipien und Betrieb
- Drohnen-Vibrationsdämpfung


