تطبيق نظرية الطيران للدرون: الفيزياء ومبادئ طيران متعدد الدوارات
فهم المبادئ النظرية وراء طيران الدرون أمر ضروري للطيارين الذين يرغبون في إتقان مهاراتهم، وحل المشكلات، وتحسين الأداء. بعد سنوات من دراسة ديناميكيات الطيران وبناء عدد لا يحصى من الطائرات بدون طيار، وجدت أن الفهم الجيد لنظرية الطيران يمكن أن يحول الطيار الجيد إلى طيار استثنائي. سيرشدك هذا الدليل الشامل عبر الفيزياء والمبادئ التي تجعل طيران المتعدد الدوارات ممكناً.
مقدمة في نظرية طيران متعدد الدوارات
تمثل الطائرات متعددة الدوارات فئة فريدة من الطائرات التي تختلف بشكل أساسي عن الطائرات ذات الأجنحة الثابتة والمروحيات التقليدية. قدرتها على التحليق في مكانها، والمناورة بدقة، والانتقال بين أوضاع الطيران المختلفة يجعلها متعددة الاستخدامات ولكن أيضًا تقدم ديناميكيات طيران معقدة.
الاختلاف الأساسي
على عكس الطائرات ذات الأجنحة الثابتة التي تولد الرفع من خلال الأسطح الانسيابية المتحركة في الهواء، أو المروحيات التقليدية التي تستخدم أنظمة ميكانيكية معقدة مثل أطباق الانزلاق للتحكم في دوار رئيسي:
- تستخدم الطائرات متعددة الدوارات مراوح متعددة ذات خطوة ثابتة
- تحقق التحكم من خلال اختلاف الدفع بين المحركات
- تفتقر إلى التعقيد الميكانيكي للمروحيات ولكنها تتطلب أنظمة تحكم إلكترونية متطورة
يخلق هذا النهج نظام طيران أبسط ميكانيكيًا ولكنه أكثر تعقيدًا من الناحية الإلكترونية والرياضية.
الفيزياء الأساسية لطيران متعدد الدوارات
القوى الأربعة
مثل جميع الطائرات، تخضع الطائرات متعددة الدوارات لأربع قوى أساسية:
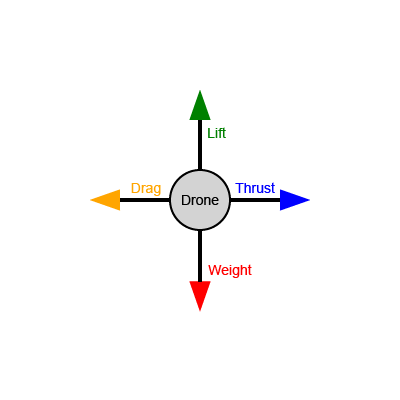
- الرفع: القوة المتجهة للأعلى التي تولدها المراوح
- متناسبة طرديًا مع مربع سرعة دوران المروحة
- تتأثر بتصميم المروحة، وكثافة الهواء، وقوة المحرك
- يمكن توجيهها عن طريق إمالة الطائرة
- الوزن: قوة الجاذبية الثابتة المتجهة للأسفل
- تساوي كتلة الطائرة مضروبة في تسارع الجاذبية
- تؤثر من خلال مركز الثقل
- تظل ثابتة بغض النظر عن اتجاه الطائرة
- المقاومة: قوة المقاومة التي تعارض الحركة خلال الهواء
- تزداد مع مربع السرعة
- تتأثر بالشكل الانسيابي للطائرة
- تؤثر في الاتجاه المعاكس للحركة
- الدفع: القوة التي تدفع الطائرة أفقيًا
- تتولد من خلال إعادة توجيه قوة المروحة عبر الإمالة
- تسمح بالحركة للأمام والخلف والجانبين
- يجب أن تتغلب على المقاومة للحفاظ على الحركة الأفقية
اعتبار إضافي:
- القصور الذاتي: على الرغم من أنها ليست واحدة من القوى الأساسية الأربع، إلا أنها تؤثر على ديناميكيات الطائرة
- يتحدد بكتلة الطائرة وتوزيعها
- يؤثر على مدى سرعة تغيير الطائرة للاتجاه أو السرعة
- الكتلة الأعلى تعني استقرارًا أكبر ولكن رشاقة أقل
توليد الدفع
المعادلة الأساسية للدفع الذي تولده المروحة هي:
T = CT × ρ × n² × D⁴
حيث:
- T = الدفع (نيوتن)
- CT = معامل الدفع (يعتمد على تصميم المروحة)
- ρ = كثافة الهواء (كجم/م³)
- n = سرعة الدوران (دورات في الثانية)
- D = قطر المروحة (م)
تكشف هذه المعادلة عدة رؤى مهمة:
- يزداد الدفع مع مربع سرعة الدوران
- يزداد الدفع مع الأس الرابع لقطر المروحة
- المراوح الأكبر أكثر كفاءة بشكل ملحوظ من المراوح الأصغر
- كثافة الهواء تؤثر على الدفع (ينخفض الأداء في الارتفاعات العالية)
لقد لاحظت هذه العلاقة بنفسي عند اختبار أحجام مختلفة من المراوح. الانتقال من مروحة 5 بوصة إلى مروحة 6 بوصة (زيادة بنسبة 20% في القطر) يمكن أن يوفر نظريًا زيادة بنسبة 107% في الدفع عند نفس سرعة الدوران، على الرغم من أن المكاسب الفعلية عادة ما تكون أقل بسبب قيود المحرك.
تكوين ومبادئ التحكم في متعدد الدوارات
التكوينات الشائعة
تأتي الطائرات متعددة الدوارات في تكوينات مختلفة، كل منها له خصائص فريدة:
- ثلاثية الدوارات: ثلاثة محركات، تتطلب مؤازرًا للتحكم في الانعراج
- رباعية الدوارات: أربعة محركات، التكوين الأكثر شيوعًا
- تكوين "X" (المحركات تشكل نمط X)
- تكوين "+" (المحركات تشكل نمط +)
- سداسية الدوارات: ستة محركات، قدرة رفع وتكرار أكبر
- ثمانية الدوارات: ثمانية محركات، أقصى قدرة رفع وتكرار
أصبحت رباعية الدوارات هي المعيار لمعظم التطبيقات بسبب توازنها الأمثل بين البساطة والكفاءة وسلطة التحكم.
أنماط دوران المحرك
للحفاظ على طيران مستقر لمتعدد الدوارات، يجب أن تدور المحركات في اتجاهات متعاكسة لمواجهة تأثيرات عزم الدوران:
في طائرة رباعية الدوارات نموذجية:
- تدور المحركات القطرية في نفس الاتجاه
- تدور المحركات المتجاورة في اتجاهات متعاكسة
- يوازن هذا النمط قوى عزم الدوران أثناء التحليق
- كما أنه يوفر سلطة التحكم اللازمة للمناورات
درجات الحرية الستة
تعمل الطائرات متعددة الدوارات بست درجات من الحرية (6DOF)، والتي تمثل جميع الطرق الممكنة التي يمكن للطائرة أن تتحرك بها في الفضاء ثلاثي الأبعاد:
- الانتقال على طول ثلاثة محاور:
- الخانق/الارتفاع (المحور Z): يتم التحكم فيه عن طريق زيادة أو تقليل جميع المحركات بالتساوي
- للأمام/للخلف (المحور Y): يتم التحكم فيه عن طريق رفع مقدمة الطائرة (الإمالة للأمام/للخلف)
- يسار/يمين (المحور X): يتم التحكم فيه عن طريق تدحرج الطائرة (الإمالة لليسار/لليمين)
- الدوران حول ثلاثة محاور:
- الميلان (Pitch): الدوران حول المحور X (الأنف لأعلى/لأسفل)
- الانحدار (Roll): الدوران حول المحور Y (الإمالة لليسار/لليمين)
- الانعراج (Yaw): الدوران حول المحور Z (الدوران في اتجاه عقارب الساعة/عكس اتجاه عقارب الساعة)
آليات التحكم
يحقق وحدة التحكم في الطيران التحكم عن طريق تغيير سرعة المحركات الفردية:
التحكم في الخانق
- جميع المحركات تزيد أو تقلل السرعة بشكل متساوٍ
- يتحكم مباشرة في التسارع العمودي
- في التحويم المستقر، يساوي الدفع الإجمالي الوزن
التحكم في الميلان الأمامي والخلفي (Pitch)
- تنخفض سرعة المحركات الأمامية بينما تزيد سرعة المحركات الخلفية (أو العكس)
- يخلق عزم دوران حول المحور Y
- ينتج عنه ميل للأمام أو للخلف وبالتالي الحركة المقابلة
التحكم في الميلان الجانبي (Roll)
- تنخفض سرعة المحركات اليسرى بينما تزيد سرعة المحركات اليمنى (أو العكس)
- يخلق عزم دوران حول المحور X
- ينتج عنه ميل لليسار أو لليمين وبالتالي الحركة المقابلة
التحكم في الدوران (Yaw)
- تزيد سرعة المحركات التي تدور مع عقارب الساعة بينما تنخفض سرعة المحركات التي تدور عكس عقارب الساعة (أو العكس)
- يخلق عزم دوران صافي حول المحور Z
- ينتج عنه دوران مع عقارب الساعة أو عكس عقارب الساعة
لقد وجدت أن فهم آليات التحكم هذه أمر بالغ الأهمية لتشخيص مشاكل الطيران. على سبيل المثال، إذا كانت طائرتك تنجرف يمينًا رغم ضبط التوازن، فقد يشير ذلك إلى مشكلة في المعايرة، أو عدم توازن في قوة المحرك، أو حتى انحناء طفيف في الإطار يؤثر على توازن الدفع بين اليسار واليمين.
ديناميكيات الطيران والاستقرار
الاستقرار الثابت مقابل الاستقرار الديناميكي
تُظهر الطائرات متعددة المراوح خصائص استقرار مختلفة:
- الاستقرار الثابت: الميل للعودة إلى التوازن عند الاضطراب
- الطائرات متعددة المراوح غير مستقرة ثابتة بطبيعتها بدون مساعدة إلكترونية
- مركز الثقل أسفل مستوى المروحة يحسن الاستقرار الثابت
- الاستقرار الديناميكي: ميل التذبذبات للانخفاض مع مرور الوقت
- يتأثر بضبط PID وأداء حلقة التحكم
- يتأثر بصلابة الإطار وتوزيع الكتلة
على عكس الطائرات ذات الأجنحة الثابتة التي يمكن تصميمها باستقرار ذاتي، تعتمد الطائرات متعددة المراوح بالكامل على التثبيت الإلكتروني النشط.
عزم القصور الذاتي
يؤثر توزيع كتلة الطائرة بشكل كبير على خصائص طيرانها:
- عزم القصور الذاتي: مقاومة التسارع الزاوي حول محور
- الكتلة المركزية: عزم قصور ذاتي أقل، استجابة أكبر لمدخلات التحكم
- الكتلة الموزعة: عزم قصور ذاتي أعلى، أكثر استقرارًا لكن أقل استجابة
هذا هو السبب في أن طائرات السباق عادة ما تكون ذات تصميمات مدمجة ومركزية لتحقيق أقصى قدر من الرشاقة، بينما منصات التصوير غالبًا ما يكون لديها وزن أكثر توزيعًا للحصول على حركة أكثر سلاسة.
تأثير البندول
موقع مركز الثقل بالنسبة لمستوى المروحة يخلق تأثير البندول:
- مركز الثقل أسفل مستوى المروحة: يخلق تأثير بندول ذاتي التصحيح
- مركز الثقل عند مستوى المروحة: استقرار محايد، استجابة أكبر
- مركز الثقل فوق مستوى المروحة: بندول مقلوب، غير مستقر للغاية
معظم الطائرات مصممة بحيث تكون البطارية مثبتة أسفل الإطار لخفض مركز الثقل وتحسين الاستقرار. لقد جربت مواضع مختلفة للبطارية ووجدت أن رفع البطارية بالقرب من مستوى المروحة يزيد من الرشاقة ولكنه يتطلب مهارة أكبر من الطيار وضبطًا أفضل.
أنظمة التحكم ووحدات التحكم في الطيران
حلقة التحكم
تستخدم وحدات التحكم في الطيران الحديثة نظام تحكم بالتغذية الراجعة:

- نقطة الضبط: الحالة المطلوبة (من مدخلات جهاز الاستقبال)
- التغذية الراجعة: الحالة الفعلية (من المستشعرات)
- الخطأ: الفرق بين نقطة الضبط والتغذية الراجعة
- وحدة التحكم: تحسب المخرجات لتقليل الخطأ
- النظام: الطائرة نفسها، تستجيب للمخرجات
- المستشعرات: تقيس حالة الطائرة لتوفير التغذية الراجعة
يعمل نظام الحلقة المغلقة هذا مئات المرات في الثانية للحفاظ على الاستقرار.
التحكم PID
خوارزمية التحكم الأكثر شيوعًا المستخدمة في وحدات التحكم في الطيران هي PID (التناسبي-التكاملي-التفاضلي):
- التناسبي (P): يستجيب بشكل متناسب مع الخطأ الحالي
- P الأعلى: استجابة أكثر عدوانية، احتمالية للتذبذب
- P الأقل: استجابة أكثر سلاسة، احتمالية للبطء
- التكاملي (I): يستجيب للخطأ المتراكم مع مرور الوقت
- I الأعلى: أفضل في تصحيح الأخطاء المستمرة، احتمالية للتجاوز
- I الأقل: تجاوز أقل، قد لا يصحح الأخطاء بالكامل
- التفاضلي (D): يستجيب لمعدل تغير الخطأ
- D الأعلى: تخميد أفضل للتذبذبات، حساس للضوضاء
- D الأقل: أقل حساسية للضوضاء، قد يسمح بالتذبذبات

ضبط PID الصحيح ضروري للحصول على أداء طيران مثالي. عادة ما أبدأ بمعاملات P للحصول على سلوك سريع الاستجابة لكن بدون تذبذب، ثم أضيف I للقضاء على الانجراف، وأخيرًا أضيف D لتخميد أي تذبذبات متبقية.
الجيروسكوبات ومقاييس التسارع
المستشعرات الأساسية في وحدة التحكم في الطيران هي:
- الجيروسكوب: يقيس السرعة الزاوية حول كل محور
- المستشعر الأساسي للتثبيت
- معدل تحديث عالٍ (8 كيلوهرتز+)
- يخضع للانجراف مع مرور الوقت
- مقياس التسارع: يقيس التسارع الخطي بما في ذلك الجاذبية
- يستخدم كمرجع للأفق
- معدل تحديث أقل من الجيروسكوب
- يتأثر بتسارع الطائرة
تدمج وحدة التحكم في الطيران البيانات من هذه المستشعرات لتحديد وضع الطائرة وحركتها.
المرشحات التكميلية ومرشحات كالمان
للتغلب على قيود المستشعرات الفردية، تستخدم وحدات التحكم في الطيران خوارزميات دمج المستشعرات:
- مرشح تكميلي: نهج بسيط يجمع بين بيانات الجيروسكوب وبيانات مقياس التسارع
- بيانات الجيروسكوب للدقة على المدى القصير
- بيانات مقياس التسارع كمرجع على المدى الطويل
- كفاءة حسابية عالية
- مرشح كالمان: نهج أكثر تطوراً
- توقع إحصائي للحالة الحقيقية
- يأخذ في الاعتبار ضوضاء الاستشعار وعدم اليقين
- أكثر كثافة من الناحية الحسابية
توفر هذه المرشحات تقديراً أكثر دقة لوضعية الطائرة بدون طيار مما يمكن أن يوفره أي مستشعر واحد.
مفاهيم الطيران المتقدمة
نسبة الدفع إلى الوزن
نسبة الدفع إلى الوزن (TWR) هي مقياس حاسم لأداء الطائرة بدون طيار:
- TWR < 1: لا يمكن الإقلاع
- TWR ≈ 1-1.5: طيران بطيء ومستقر (منصات التصوير)
- TWR ≈ 2-3: أداء متوازن (طائرات الفري ستايل)
- TWR ≈ 4-7: أداء عالي (طائرات السباق)
- TWR > 7: عدوانية للغاية (سباقات/فري ستايل متخصصة)
نسبة الدفع إلى الوزن الأعلى توفر:
- تسارع أفضل
- زوايا تسلق أكثر حدة
- مناورات أكثر عدوانية
- مسافات توقف أقصر
- مقاومة أكبر للرياح
ومع ذلك، فإنها تؤدي أيضاً إلى:
- تقليل مدة الطيران
- تحكم أكثر تحدياً
- متطلبات طاقة أعلى
تحميل قرص المروحة
تحميل القرص هو نسبة الوزن إلى المساحة الإجمالية التي تجتازها المراوح:
- تحميل قرص منخفض: أكثر كفاءة، أداء تحويم أفضل
- تحميل قرص مرتفع: أقل كفاءة، أفضل للطيران الأمامي
يشرح هذا المفهوم سبب كون المراوح الأكبر حجماً أكثر كفاءة للتحويم ولماذا يؤدي زيادة حجم المروحة غالباً إلى وقت طيران أفضل من زيادة سعة البطارية.
عزم المحرك وقصور المروحة الذاتي
التفاعل بين عزم المحرك وقصور المروحة الذاتي يؤثر على استجابة الخانق:
- عزم المحرك: القدرة على تغيير دورات في الدقيقة بسرعة
- المحركات ذات KV الأعلى عادة ما يكون لديها عزم دوران أقل
- أحجام العضو الثابت الأكبر توفر عزم دوران أكبر
- قصور المروحة الذاتي: مقاومة لتغييرات دورات في الدقيقة
- المراوح الأكبر لديها قصور ذاتي أعلى
- المراوح الأثقل لديها قصور ذاتي أعلى
النسبة بين عزم المحرك وقصور المروحة الذاتي تحدد استجابة الخانق. هذا هو السبب في أن طائرات السباق غالباً ما تستخدم مراوح أصغر وأخف مع محركات ذات عزم دوران عالي للحصول على أقصى استجابة.
خطية الخانق والدقة
العلاقة بين إدخال الخانق وإخراج الدفع غير خطية:
- يزداد الدفع مع مربع دورات المحرك في الدقيقة
- هذا يخلق استجابة خانق غير خطية
- بروتوكولات رقمية مثل DShot تساعد على تحسين الدقة
- تنفذ وحدات التحكم في الطيران الحديثة منحنيات خانق لجعل الاستجابة خطية
فهم هذه اللاخطية أمر حاسم للتحكم الدقيق بالخانق، خاصة في سيناريوهات الطيران القريب والسباق.
تأثير الأرض
عند الطيران بالقرب من سطح، تواجه الطائرات بدون طيار تأثير الأرض:
- زيادة الكفاءة عند التحويم ضمن ~1 قطر مروحة من السطح
- يتم إنشاؤه بواسطة وسادة هوائية بين المراوح والسطح
- يمكن أن يسبب رفعاً غير متوقع عند الإقلاع أو الهبوط
- أكثر وضوحاً مع المراوح الكبيرة
لاحظت أن هذا التأثير قوي بشكل خاص مع الطائرات بدون طيار السينمائية التي تستخدم مراوح كبيرة، مما يتسبب أحياناً في "ارتداد" أثناء محاولات الهبوط إذا لم يتم تقليل الخانق بشكل مناسب.
أوضاع الطيران وخوارزميات التحكم
وضع المعدل مقابل التسوية الذاتية
توفر وحدات التحكم في الطيران الحديثة أوضاع تحكم مختلفة:
- وضع المعدل (Acro/Manual):
- تعمل وحدة التحكم فقط على استقرار معدلات الدوران
- تحافظ الطائرة على وضعيتها عندما تكون العصي في المنتصف
- يسمح بحرية كاملة للحركة بما في ذلك الطيران المقلوب
- يفضله طيارو الفري ستايل والسباقات
- أوضاع التسوية الذاتية (Angle/Horizon):
- تعمل وحدة التحكم بنشاط للحفاظ على التوجيه المستوي
- تعود الطائرة إلى المستوى عندما تكون العصي في المنتصف
- زاوية إمالة قصوى محدودة
- أسهل للمبتدئين والتصوير الجوي
الفرق الرئيسي هو أن وضع المعدل يتحكم في السرعة الزاوية، بينما تتحكم أوضاع التسوية الذاتية في الزاوية المطلقة.
حماية مغلف الطيران
تنفذ بعض وحدات التحكم في الطيران حدوداً لمنع المواقف الخطرة:
- حدود الزاوية: تمنع الإمالة المفرطة التي قد تسبب فقدان الارتفاع
- حدود الطاقة: تمنع تلف البطارية من سحب التيار المفرط
- حدود السرعة: تقيد السرعة القصوى للسلامة
- السياج الجغرافي: يمنع الطيران في المناطق المقيدة أو خارج مسافة محددة
هذه الحماية أكثر شيوعاً في الطائرات التجارية وطائرات التصوير منها في نماذج السباق/الفري ستايل.
خوارزميات التحكم المتقدمة
بعد PID الأساسي، تنفذ وحدات التحكم في الطيران المتقدمة:
- التغذية الأمامية: تتوقع احتياجات التحكم بناءً على إدخال العصا
- مرشحات الشق الديناميكية: تحدد تلقائياً وتصفي الترددات الرنينية
- مضاد الجاذبية: يعوض عن تغيرات الدفع أثناء تعديلات الخانق السريعة
- وضع الجو: يحافظ على السلطة أثناء مناورات الخانق الصفري
تحسن هذه الخوارزميات بشكل كبير أداء الطيران، خاصة في المناورات القصوى وسيناريوهات السباق.
العوامل البيئية التي تؤثر على الطيران
كثافة الهواء والارتفاع
تؤثر كثافة الهواء مباشرة على أداء المروحة:
- كثافة أعلى (ارتفاع أقل، هواء أبرد): دفع أكبر، كفاءة أفضل
- كثافة أقل (ارتفاع أعلى، هواء أدفأ): دفع أقل، كفاءة منخفضة
على ارتفاع 5000 قدم فوق مستوى سطح البحر، قد تفقد الطائرة بدون طيار 10-15٪ من قوة دفعها مقارنة بأدائها عند مستوى سطح البحر. لقد اختبرت هذا بنفسي عند الطيران في مواقع جبلية، حيث تبدو الطائرات بدون طيار أقل قوة واستجابة بشكل ملحوظ.
الرياح والاضطراب
تخلق الرياح تحديات معقدة لطيران الطائرات بدون طيار:
- الرياح الثابتة: تتطلب تصحيحاً مستمراً للحفاظ على الموقع
- الرياح العاصفة: اضطرابات غير متوقعة تتطلب استجابة سريعة
- الاضطراب: حركة هواء فوضوية، خاصة حول العوائق
- تدرج الرياح: تزداد سرعة الرياح مع الارتفاع عن سطح الأرض
يمكن لوحدات التحكم في الطيران الحديثة أن تعوض عن الرياح إلى حد ما، لكن فهم أنماط الرياح والقيود أمر ضروري للطيران الآمن.
تأثيرات درجة الحرارة
تؤثر درجة الحرارة على جوانب متعددة من أداء الطائرة بدون طيار:
- المحركات: درجات الحرارة الأعلى تقلل من الكفاءة والطاقة القصوى
- البطاريات: البرد يقلل السعة والجهد؛ الحرارة تزيد من المقاومة الداخلية
- الإلكترونيات: درجات الحرارة القصوى يمكن أن تؤثر على معايرة المستشعر
- كثافة الهواء: درجات الحرارة الأعلى تقلل من كثافة الهواء والدفع
وجدت أن الأداء في الظروف الباردة جداً (تحت درجة التجمد) يمكن أن ينخفض بنسبة 20-30٪ مقارنة بدرجات الحرارة المثلى، بسبب قيود البطارية في المقام الأول.
الأسئلة الشائعة: أسئلة متداولة حول نظرية طيران الدرون
كيف تحافظ الطائرات بدون طيار على الاستقرار دون استخدام دوار ذيلي مثل المروحيات؟
على عكس المروحيات التي تستخدم دوارًا ذيليًا لمواجهة عزم الدوران للدوار الرئيسي، تستخدم الطائرات متعددة الدوارات مراوح تدور في اتجاهات متعاكسة. في الطائرة رباعية المراوح، يدور محركان في اتجاه عقارب الساعة ويدور اثنان عكس اتجاه عقارب الساعة، مما يوازن قوى عزم الدوران. يلغي هذا التصميم الحاجة إلى دوار ذيلي ويبسط النظام الميكانيكي بشكل كبير. يقوم وحدة التحكم بالطيران باستمرار بضبط سرعات المحرك الفردية للحفاظ على الاتجاه المطلوب.
ما الفرق بين المحركات ذات الفرش والمحركات بدون فرش من حيث ديناميكيات الطيران؟
توفر المحركات بدون فرش نسب قوة إلى وزن أعلى، وكفاءة أفضل، وأوقات استجابة أسرع مقارنة بالمحركات ذات الفرش. من منظور ديناميكيات الطيران، توفر المحركات بدون فرش:
- تحكم أكثر دقة بسبب التسارع/التباطؤ الأسرع
- قوة دفع قصوى أعلى لأداء أفضل
- أداء أكثر اتساقًا طوال دورة تفريغ البطارية
- عزم قصور ذاتي أقل في مجموعة الدوران
تترجم هذه المزايا إلى خصائص طيران أكثر استجابة وأداء عام أفضل، ولهذا السبب تستخدم تقريبًا جميع طائرات الدرون عالية الأداء محركات بدون فرش.
كيف يؤثر جهد البطارية على خصائص الطيران؟
لجهد البطارية عدة تأثيرات على الطيران:
- الجهد الأعلى يسمح للمحركات بالدوران بشكل أسرع، مما يزيد من قوة الدفع القصوى
- انخفاض الجهد تحت الحمل يؤثر على الطاقة المتاحة أثناء المناورات العدوانية
- ينخفض الجهد مع تفريغ البطارية، مما يقلل تدريجياً من الأداء
- تتطلب أنظمة الجهد المختلفة (3S، 4S، 6S) اختيار قيمة KV مناسبة للمحرك
تطبق وحدات التحكم بالطيران الحديثة تعويض الجهد للحفاظ على خصائص طيران متسقة طوال دورة تفريغ البطارية، ولكن الأداء الأقصى سيستمر في الانخفاض مع انخفاض الجهد.
لماذا تستخدم طائرات السباق زوايا إمالة عالية جداً؟
غالبًا ما تطير طائرات السباق بزوايا إمالة أمامية قصوى (30-60 درجة) لعدة أسباب:
- لتوجيه المزيد من قوة الدفع إلى الأمام للتسارع والسرعة
- لتقليل المساحة الأمامية وتقليل مقاومة الهواء
- للحفاظ على خط الرؤية مع بوابات/عوائق السباق أدناه
تعتمد زاوية الإمالة القصوى الفعالة على نسبة الدفع إلى الوزن. تحتاج الطائرة بدون طيار إلى نسبة TWR لا تقل عن 1.15 للتحليق بزاوية 30 درجة، و1.41 للتحليق بزاوية 45 درجة، و2.0 للتحليق بزاوية 60 درجة. عادة ما تمتلك طائرات السباق نسب TWR من 4-7+ للسماح بهذه الزوايا القصوى مع الحفاظ على الارتفاع وقدرة التسارع.
كيف يؤثر الارتفاع وكثافة الهواء على أداء الطائرة بدون طيار؟
مع زيادة الارتفاع، تنخفض كثافة الهواء، مما يقلل من كفاءة المروحة. هذا يؤثر على الطائرات بدون طيار بعدة طرق:
- انخفاض قوة الدفع القصوى (عادة 3-4% لكل 1000 قدم من الارتفاع)
- انخفاض السيطرة والاستجابة
- ارتفاع درجات حرارة المحرك بسبب قلة التبريد
- احتمال تقصير أوقات الطيران بسبب عمل المحركات بجهد أكبر
عند الطيران على ارتفاعات عالية، يُنصح باستخدام مراوح أكبر، وبطاريات ذات سعة أعلى، وأنماط طيران أكثر تحفظًا للتعويض عن هذه التأثيرات.
ما الذي يسبب اهتزازات تيار المروحة وكيف يمكن تقليلها؟
تحدث اهتزازات تيار المروحة عندما تطير الطائرة بدون طيار عبر الهواء المضطرب الذي تنتجه مراوحها، عادة أثناء تغييرات الاتجاه السريعة أو الهبوط. يقلل تدفق الهواء المضطرب هذا من كفاءة المروحة ويخلق قوى غير متوقعة يجب على وحدة التحكم بالطيران تعويضها.
لتقليل اضطرابات تيار المروحة:
- ضبط قيم PID بشكل مناسب، خاصة معاملات D
- استخدام التصفية الديناميكية للتكيف مع الظروف المتغيرة
- تنفيذ ميزات متقدمة لوحدة التحكم بالطيران مثل تخفيف اضطرابات تيار المروحة
- اعتماد تقنيات طيران تقلل من الانتقالات السريعة عبر الهواء المضطرب
- النظر في تصميمات إطارات تفصل المراوح بشكل أكبر أو تستخدم قنوات
كيف يؤثر توزيع الوزن على خصائص الطيران؟
يحدد توزيع الوزن لحظات القصور الذاتي للطائرة حول كل محور، مما يؤثر مباشرة على مدى سرعة تغيير اتجاهها:
- الكتلة المركزة (عزم قصور ذاتي أقل) تسمح بمعدلات دوران أسرع
- الكتلة الموزعة (عزم قصور ذاتي أعلى) توفر حركة أكثر استقرارًا وسلاسة
- توزيع الوزن غير المتماثل يمكن أن يسبب تعاملًا غير متسق بين المحاور
تقوم طائرات السباق عادة بتركيز الكتلة لأقصى قدر من الرشاقة، بينما توزع منصات التصوير الوزن بشكل أكثر توازنًا للحصول على حركة أكثر سلاسة واستقرار أفضل.
ما هي العلاقة بين قيمة KV للمحرك والجهد وحجم المروحة؟
يجب موازنة هذه العوامل الثلاثة للحصول على الأداء الأمثل:
- تحدد قيمة KV للمحرك عدد الدورات في الدقيقة لكل فولت (على سبيل المثال، محرك 2400KV على بطارية 4S سيدور بحوالي 35,520 دورة في الدقيقة بدون حمل)
- المحركات ذات قيمة KV الأعلى تعمل بشكل أفضل مع المراوح الأصغر والجهد الأقل
- المحركات ذات قيمة KV الأقل تعمل بشكل أفضل مع المراوح الأكبر والجهد الأعلى
يوفر المزيج المثالي قوة الدفع المطلوبة مع الحفاظ على المحركات ضمن نطاق تشغيلها الفعال. كقاعدة عامة:
- مراوح 5 بوصة: 1800-2600KV على 4S، 1300-1700KV على 6S
- مراوح 6 بوصة: 1600-1900KV على 4S، 1100-1400KV على 6S
- مراوح 7 بوصة: 1300-1600KV على 4S، 900-1200KV على 6S
كيف تؤثر مرشحات الجيروسكوب على أداء الطيران؟
تزيل مرشحات الجيروسكوب الضوضاء من بيانات المستشعر ولكنها تدخل تأخيرًا:
- المزيد من الترشيح يوفر تشغيلًا أكثر سلاسة ولكن استجابة أبطأ
- الترشيح الأقل يوفر استجابة أسرع ولكن قد يسمح للضوضاء بالتأثير على التحكم
- المرشحات الديناميكية تضبط نفسها تلقائيًا للظروف الحالية
يعتمد توازن الترشيح الأمثل على التطبيق:
- السباق: ترشيح بالحد الأدنى لأقصى استجابة
- الاستعراض الحر: ترشيح معتدل للحصول على استجابة نظيفة بدون تذبذبات
- التصوير: ترشيح أعلى للحركة السلسة والمتوقعة
ما الذي يسبب انخفاض جهد البطارية وكيف يؤثر على الطيران؟
يحدث انخفاض الجهد عندما لا تستطيع البطارية الحفاظ على جهدها تحت الحمل بسبب المقاومة الداخلية:
- أكثر وضوحًا مع البطاريات الأقدم أو ذات الجودة المنخفضة
- يزداد سوءًا مع تفريغ البطارية
- يزداد مع سحب التيار الأعلى (الطيران العدواني)
يقلل هذا الانخفاض في الجهد من الطاقة المتاحة ويمكن أن يسبب:
- انخفاض قوة الدفع القصوى أثناء مناورات الخانق العالية
- خصائص طيران غير متسقة
- تحذيرات مبكرة من انخفاض الجهد
- فقدان محتمل للسيطرة إذا كان شديدًا
يمكن أن يساعد استخدام البطاريات ذات تصنيفات C المناسبة لأسلوب طيرانك وتنفيذ حد السرعة أثناء تفريغ البطاريات في إدارة هذه التأثيرات.
الخلاصة
إن فهم المبادئ النظرية وراء طيران متعدد المراوح يوفر أساسًا لتصبح طيارًا وبانيًا ومستكشفًا للأعطال أكثر مهارة. بينما تتعامل وحدات التحكم بالطيران الحديثة مع الحسابات المعقدة اللازمة للطيران المستقر، فإن معرفة كيف ولماذا تتصرف الطائرات بدون طيار كما تفعل يسمح لك بـ:
- اتخذ خيارات مكونات مدروسة لاحتياجاتك المحددة
- ضبط طائرتك بدون طيار للحصول على الأداء الأمثل
- تشخيص وحل مشاكل الطيران
- الطيران بدقة وثقة أكبر
- دفع حدود ما هو ممكن مع الطائرات متعددة الدوارات
يستمر مجال تكنولوجيا الطائرات بدون طيار في التطور بسرعة، مع تقدم في المحركات والبطاريات وخوارزميات التحكم والمواد التي توسع باستمرار نطاق الأداء. من خلال فهم المبادئ الأساسية المشمولة في هذا الدليل، ستكون مجهزًا جيدًا لتقييم والاستفادة من هذه الابتكارات في طيرانك الخاص.
سواء كنت تبني طائرتك بدون طيار الأولى أو المئة، آمل أن يساعدك هذا الدليل في تعميق فهمك للفيزياء والهندسة الرائعة التي تجعل الطيران متعدد الدوارات ممكنًا. طيرانًا سعيدًا!
المراجع والقراءة الإضافية
- محركات الطائرات بدون طيار: الاختيار، الأداء، والتحسين
- مراوح الطائرات بدون طيار: الاختيار، الأداء، والتحسين
- هياكل الطائرات بدون طيار: الأحجام، المواد، والاختيار
- وحدات تحكم طيران الطائرات بدون طيار: المبادئ والتشغيل
- تخميد اهتزاز الطائرات بدون طيار


