Controladores de Voo de Drone: Princípios e Operação
O controlador de voo (FC) é o cérebro do seu drone FPV, traduzindo seus comandos de controle nos comandos precisos do motor necessários para o voo. Ele processa dados de vários sensores, executa algoritmos complexos e faz centenas de ajustes por segundo para manter seu drone estável e responsivo. Este guia abrangente explora a tecnologia do controlador de voo, opções de firmware, critérios de seleção, procedimentos de configuração e recursos avançados para ajudá-lo a entender e otimizar este componente crítico.
Introdução aos Controladores de Voo
Depois de anos construindo e voando drones FPV, passei a apreciar que nenhum componente único influencia mais sua experiência de voo do que o controlador de voo. Ainda me lembro da minha primeira construção com uma placa KK primitiva que mal mantinha o drone estável. Avançando para hoje, os sofisticados processadores H7 nos controladores de voo modernos estão realizando cálculos complexos que pareceriam ficção científica há apenas alguns anos.

Um controlador de voo é uma placa de circuito especializada contendo um microprocessador, vários sensores e conexões de entrada/saída. Ele serve como a unidade central de processamento do seu drone, realizando várias funções críticas:
• Estabilização: Manter o voo nivelado e compensar forças externas
• Processamento de Entrada de Controle: Traduzir os movimentos do stick em comandos do motor
• Integração de Sensores: Coletar e processar dados de giroscópios, acelerômetros, etc.
• Gerenciamento de Recursos: Lidar com modos como acro, ângulo, retenção de GPS e mais
• Comunicação Periférica: Interagir com receptores, ESCs, câmeras e outros componentes
A Evolução dos Controladores de Voo
Testemunhei a evolução dramática dos controladores de voo desde 2019, quando comecei meu hobby.
Tudo começou com processadores básicos de 8 bits que mal conseguiam lidar com a estabilização simples. O salto para controladores de 32 bits por volta de 2014 foi revolucionário - de repente, os quads eram capazes de um controle muito mais preciso e recursos avançados. A progressão tem sido notável:
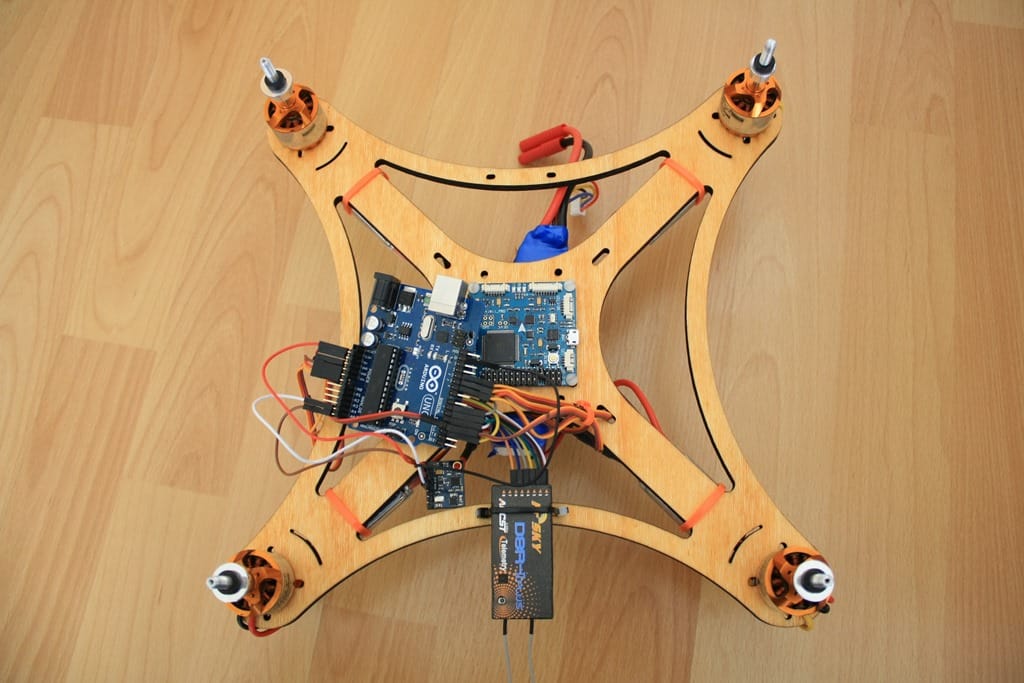
• FCs Iniciais (2010-2013): Estabilização básica com recursos limitados. Construções com uma placa MultiWii exigiam atenção constante apenas para manter o voo nivelado.
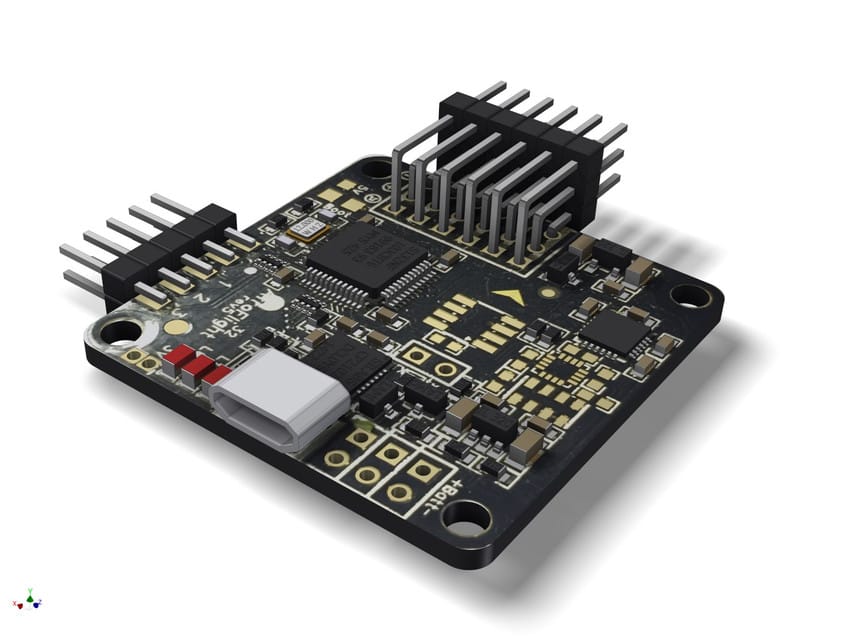
• Revolução de 32 bits (2014-2016): Processamento mais rápido e melhores algoritmos. O Naze32 foi um divisor de águas - de repente, os quads pareciam máquinas completamente diferentes.
• Era Moderna (2017-presente): Poderosos processadores F4/F7 e componentes integrados. Descobri que esses controladores de voo modernos podem lidar com filtragem complexa e altas taxas de loop que fazem até o voo freestyle agressivo parecer suave como manteiga.
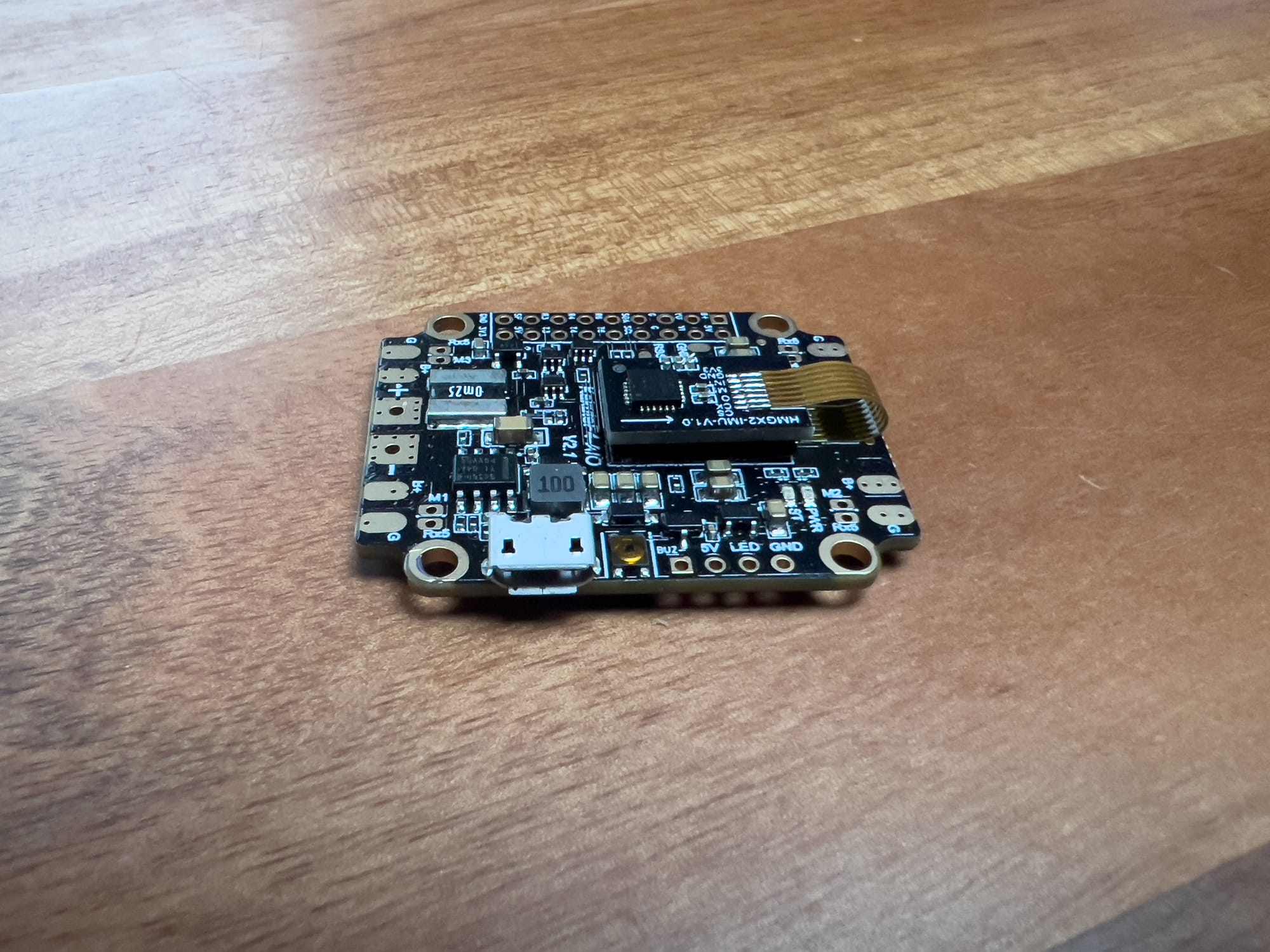
• Próxima Geração (2023+): Processadores H7 com capacidades de aprendizado de máquina e fusão de sensores aprimorada. Esses são controladores de ponta, e a diferença no desempenho de voo é sutil, mas perceptível, especialmente em condições desafiadoras.
Essa progressão levou a controladores de voo menores e mais capazes, com recursos e desempenho cada vez mais sofisticados. Até me lembro dos tempos em que um controlador de voo tinha o tamanho de um cartão de crédito - agora eles geralmente são menores que um selo postal, enquanto fazem muito mais.
Componentes Básicos de um Controlador de Voo
Os controladores de voo modernos integram vários componentes-chave que trabalham juntos para criar a experiência de voo. Deixe-me guiá-lo pelo que aprendi sobre esses componentes ao longo de anos de construção e solução de problemas.
Microprocessador
A unidade central de computação é normalmente um processador STM32, e o tipo faz uma diferença significativa no desempenho. Voei com tudo, desde processadores F1 até H7, e aqui está o que descobri:
• Processadores F1: Chips mais antigos de 32 bits que agora estão obsoletos. Voei com eles algumas vezes por diversão e, embora tenham feito o trabalho, as limitações eram frustrantes.
• Processadores F3 (72MHz): Amplamente obsoletos agora, mas foram um avanço sólido em relação ao F1. Eu voei uma construção baseada em F3 e foi realmente muito satisfatório.
• Processadores F4 (168-216MHz): Ainda comuns e perfeitamente capazes para a maioria dos estilos de voo. Eu ainda uso uma placa F4 em uma construção educacional porque elas oferecem um ótimo equilíbrio entre desempenho e custo.
• Processadores F7 (216-400MHz): O padrão atual, com poder de processamento extra que é perceptível em situações exigentes. Quando mudei meu principal quad freestyle para um F7, imediatamente notei a melhoria no tratamento de filtragem complexa e taxas de loop mais altas.
• Processadores H7 (400-480MHz): Emergindo como a opção de ponta. Eu tenho testado um na minha construção de corrida, e embora as diferenças sejam sutis, a margem para recursos futuros é significativa.
O processador determina o poder computacional do controlador de voo, afetando sua capacidade de executar algoritmos complexos e manter altas taxas de loop. Aprendi que, embora o processador não seja tudo, ele define o limite para o que seu controlador de voo pode alcançar.
Sensores
Os sensores em um controlador de voo são essenciais para a estabilidade do voo e implementação de recursos. Já bati mais de alguns drones devido a problemas de sensores, então aprendi a prestar muita atenção a esse aspecto.
• Giroscópio: Mede as taxas de rotação em torno de três eixos (arfagem, rolagem, guinada). Este é o sensor mais crítico, e descobri que a qualidade do giroscópio faz uma diferença perceptível no desempenho do voo. Um giroscópio ruidoso leva a um comportamento irregular e imprevisível que nenhuma quantidade de ajuste pode corrigir completamente.
• Acelerômetro: Mede a aceleração linear e é crucial para o modo de ângulo. Raramente uso o modo de ângulo hoje em dia, mas quando deixo um amigo tentar voar um dos meus drones, fico grato por um acelerômetro bem calibrado.
• Barômetro: Mede a pressão atmosférica para estimativa de altitude. Descobri que estes são irregulares em termos de confiabilidade - eles são afetados pela turbulência das hélices e mudanças nas condições climáticas. Para retenção de altitude séria, prefiro o GPS.
• Magnetômetro (Bússola): Determina a orientação em relação ao norte magnético. Na minha experiência, estes são altamente suscetíveis a interferências de sistemas de energia e motores. Eu sempre os monto o mais longe possível dos fios de energia.
• GPS: Fornece dados de posição para recursos de navegação. Aprendi da maneira mais difícil que nem todos os módulos GPS são criados iguais - gastar um pouco mais em um módulo com melhor recepção de satélite me salvou de perder drones em voos de longo alcance. Veja também: Tecnologia GNSS para Drones
Interfaces de Entrada/Saída
As conexões para periféricos e outros componentes são o que tornam um controlador de voo versátil. Já construí de tudo, desde quads de corrida minimalistas até máquinas complexas de longo alcance, e as interfaces disponíveis fazem toda a diferença.
• Portas UART: Fornecem comunicação serial com receptores, GPS, telemetria, etc. Descobri que ter pelo menos 4-5 UARTs me dá a flexibilidade que preciso para a maioria das construções. Ficar sem UARTs é frustrante e geralmente requer compromissos.
• Barramento I2C: Permite a comunicação com certos periféricos e sensores. Tive experiências mistas com I2C - é conveniente, mas pode ser propenso a problemas de ruído se não for implementado corretamente.
• Barramento SPI: Oferece comunicação de alta velocidade com giroscópios e outros dispositivos. Isso é crítico para o desempenho, e notei que os controladores de voo com barramentos SPI bem implementados tendem a ter sinais de giroscópio mais limpos.
• Saídas do Motor: Conectam-se aos ESCs para controle do motor. A tendência para os protocolos DShot tem sido um divisor de águas na minha experiência - a precisão digital elimina muitas das dores de cabeça de calibração com as quais eu costumava lidar. Veja também: Motores para Drones FPV e ESCs para Drones FPV
• Porta USB: Usada para configuração e atualizações de firmware. Aprendi a verificar a qualidade desta conexão - uma porta USB frágil é frequentemente a primeira coisa a quebrar em um controlador de voo.
Gerenciamento de Energia
Os circuitos de energia fornecem energia limpa e regulada, e aprendi a não subestimar sua importância. No início da minha jornada FPV, experimentei problemas misteriosos de voo que foram finalmente rastreados até problemas de energia.
• Reguladores de Tensão: Convertem a tensão da bateria para 5V e 3,3V para a eletrônica. Descobri que reguladores de qualidade fazem uma diferença significativa na confiabilidade geral do sistema, especialmente em construções de alta potência.
• Capacitores de Filtragem: Suavizam a entrega de energia e reduzem o ruído. Eu sempre adiciono capacitores adicionais às minhas construções - é um seguro barato contra ruídos elétricos que podem afetar as leituras dos sensores.
• Circuitos de Proteção: Evitam danos causados por picos de tensão ou polaridade invertida. Já fritei mais de um controlador de voo conectando uma bateria ao contrário, então agora procuro placas com proteção robusta.
Para informações mais detalhadas sobre como alimentar seu drone, consulte:
Visão Geral dos Tipos e Química de Baterias para Drones
Hardware do Controlador de Voo
Ao longo dos anos, usei dezenas de controladores de voo diferentes em várias construções, e desenvolvi algumas opiniões fortes sobre o que funciona melhor para diferentes aplicações.
Classificações do Controlador de Voo
Por Tipo de Processador
O processador é a maneira mais comum de classificar os controladores de voo, e descobri que escolher o processador certo para suas necessidades é crucial.
Controladores de Voo F4 (168-216MHz) oferecem um bom equilíbrio entre desempenho e custo. Eu uso estes na maioria das minhas construções porque eles são suficientes para todas, exceto as aplicações mais exigentes. O Betaflight F4, Matek F405 e iFlight SucceX-E F4 me serviram bem.
Controladores de Voo F7 (216-400MHz) fornecem mais UARTs e recursos. Eu uso estes em construções onde preciso conectar vários periféricos ou quero o melhor desempenho possível de filtragem. O Matek F722, SpeedyBee F7 e iFlight SucceX-E F7 estão entre os meus favoritos.
Controladores de Voo H7 (400-480MHz) representam o estado da arte com capacidade máxima de processamento. Tenho testado o SpeedyBee H7 e o Matek H743, e embora as melhorias de desempenho em relação ao F7 sejam sutis, eles definitivamente estão preparados para o futuro em termos de recursos avançados.
Por Fator de Forma
Os controladores de voo vêm em padrões de montagem padronizados, e escolher o tamanho certo é crítico para sua construção.
Montagem Padrão (30,5×30,5mm) é o tamanho mais comum para construções de 5" e maiores. Eu uso estes na maioria dos meus quads freestyle e de longo alcance porque eles oferecem mais recursos e opções de conectividade.
Montagem 20×20mm é comum em construções de 3" e menores. Descobri que essas placas menores evoluíram muito em termos de recursos, embora você normalmente tenha menos UARTs e opções de conexão.
Montagem 16×16mm é usada em micro construções e tiny whoops. Estes são incrivelmente compactos, e sempre fico impressionado com a quantidade de funcionalidade que os fabricantes podem empacotar em um espaço tão pequeno.
AIO (All-In-One) combina o FC com outros componentes como ESCs. Passei a apreciar estes para determinadas construções – eles simplificam a fiação e podem reduzir o peso, embora sejam um único ponto de falha.
Por Integração de Recursos
Os controladores de voo modernos frequentemente integram componentes adicionais, e descobri que escolher o nível certo de integração pode facilitar muito a construção.
Apenas FC placas fornecem apenas a funcionalidade do controlador de voo. Eu ainda uso estes na maioria das minhas construções onde quero flexibilidade máxima na seleção de componentes.
FC+PDB combinações incluem distribuição de energia. Estes economizam espaço e simplificam a fiação.
FC+ESC (4-em-1) pilhas combinam o FC com ESCs. Eles reduzem drasticamente o tempo de construção e criam uma configuração mais limpa e confiável.
FC+ESC+VTX soluções tudo-em-um incluem o transmissor de vídeo. Tive experiências mistas com estes – eles são convenientes, mas podem esquentar, e se um componente falhar, você está substituindo tudo.
FC+ESC+VTX+RX pilhas de voo completas incluem o receptor. Estes oferecem integração máxima e, embora eu estivesse cético no início, algumas das implementações mais recentes funcionam surpreendentemente bem.
Principais Recursos de Hardware a Considerar
Ao selecionar um controlador de voo, aprendi a prestar atenção em vários recursos de hardware que podem fazer ou quebrar sua experiência de voo.
Contagem e Disponibilidade de UART
UARTs são portas seriais usadas para conectar periféricos, e descobri que ter o suficiente deles é crucial para flexibilidade.
Considero 3 UARTs o mínimo absoluto (receptor, telemetria e um reserva). Construí quads com apenas 3 UARTs, mas sempre parece limitante.
4-5 UARTs fornece uma configuração confortável para a maioria das construções. Isso me dá conexões suficientes para um receptor, telemetria, GPS e talvez controle de câmera ou controle de LED.
6+ UARTs oferece flexibilidade máxima para configurações complexas. Minhas construções de longo alcance normalmente usam muitas conexões para vários periféricos e sistemas de backup.
Aprendi da maneira mais difícil que nem todos os UARTs são criados iguais – alguns podem ser compartilhados com outras funções ou ter limitações. Sempre verifique a documentação cuidadosamente.
Tipo de Giroscópio e Implementação
O giroscópio é crítico para o desempenho do voo, e desenvolvi fortes preferências com base em anos de testes.
A série MPU6000 de giroscópios são confiáveis com um nível de ruído mais baixo. Eu prefiro estes para construções de corrida onde cada bit de desempenho importa. Eles estão ficando mais difíceis de encontrar em placas mais novas, mas ainda são minha primeira escolha quando disponíveis.
Giroscópios ICM20602/ICM20689 oferecem bom desempenho e são comuns em FCs modernos. Descobri que eles são perfeitamente adequados para a maioria dos estilos de voo, embora ligeiramente mais suscetíveis a ruídos do que o MPU6000.
O BMI270 é um sensor mais novo com excelente desempenho. Fiquei impressionado com seu tratamento de ruído em minhas construções recentes, e parece estar se tornando o novo padrão.
O método de montagem também importa – giroscópios de montagem macia vs. montagem rígida lidam com a vibração de forma diferente. Eu prefiro controladores de voo com giroscópios bem isolados, pois são menos afetados pelas vibrações que são inevitáveis em quads de alto desempenho.
Classificação do Sensor de Corrente
Para construções com sensoriamento de corrente integrado, escolher a classificação certa é importante para o gerenciamento preciso da bateria.
Drones de corrida normalmente precisam de uma classificação de 30-60A. Descobri que ir muito alto reduz a resolução e a precisão para essas construções mais leves.
Drones freestyle funcionam melhor com uma classificação de 50-100A. Minhas construções freestyle podem puxar corrente significativa durante manobras agressivas, então ter margem de manobra é importante.
Configurações de longo alcance e cinematográficas geralmente precisam de uma classificação de 40-80A. Essas construções tendem a ter um consumo de energia mais consistente, então a precisão é mais importante do que o alcance extremo.
A resolução (profundidade de bits) fornece leituras mais precisas. Descobri que sensores de corrente de maior resolução fazem uma diferença perceptível na precisão dos meus avisos de bateria e telemetria.
Gravação da Caixa Preta
Para registro e ajuste, a capacidade de caixa preta é essencial, e usei várias abordagens dependendo da construção.
Flash a bordo (geralmente 8-16MB) é conveniente, mas limitado em capacidade. Eu uso isso para sessões rápidas de ajuste, mas enche rapidamente em altas taxas de registro.
Slots para cartão SD fornecem capacidade de armazenamento muito maior, mas adicionam complexidade. Para trabalhos sérios de ajuste, prefiro controladores de voo com suporte a cartão SD – a capacidade de registrar voos inteiros em altas taxas é inestimável.
Alguns FCs não têm armazenamento e exigem um registrador externo para dados de caixa preta. Evito estes quando possível, pois o registrador externo adiciona peso e complexidade.
Recursos Adicionais de Hardware
Ao longo dos anos, passei a apreciar vários outros recursos que aprimoram a experiência de voo.
OSD (exibição na tela) integrado para a alimentação FPV é algo que agora considero essencial. Ser capaz de ver a tensão da bateria, tempo de voo e outras informações críticas durante o voo salvou muitos dos meus drones de acidentes ou danos na bateria.
Um barômetro para manter a altitude pode ser útil em certas situações. Não uso esse recurso com frequência, mas ao filmar imagens cinematográficas, uma retenção de altitude confiável é valiosa.
Saídas de controle de LED para fitas de LED facilitam o voo noturno e a identificação do drone. Passei a gostar de ter LEDs endereçáveis em minhas construções – eles não são apenas para exibição, são genuinamente úteis para orientação e indicação de status.
Saídas de buzzer para localizar drones acidentados me pouparam horas de busca. Nunca mais construo um quad sem um buzzer agora – é muito fácil perder de vista um drone escuro em grama alta ou árvores.
O controle da câmera para ajustar as configurações da câmera durante o voo é um luxo que passei a apreciar. Ser capaz de ajustar a exposição ou outras configurações sem pousar é particularmente útil para condições de luz em mudança.
Firmware do Controlador de Voo
O firmware é o software que é executado no hardware do controlador de voo, determinando seus recursos e comportamento. Experimentei a maioria das opções disponíveis, e cada uma tem seus pontos fortes e fracos.
Principais Opções de Firmware
Várias opções de firmware estão disponíveis, e passei um tempo com cada uma delas para entender suas características únicas.
Betaflight
O Betaflight é o firmware mais popular para drones FPV, e é o que eu uso na maioria das minhas construções. Ele se concentra no desempenho de corrida e estilo livre, com excelentes características de voo e desenvolvimento ativo.
Os pontos fortes do Betaflight incluem seu excelente desempenho de voo, comunidade de desenvolvimento ativa e grande base de usuários. Quando tenho um problema com o Betaflight, geralmente consigo encontrar alguém que já o resolveu.
Seus pontos fracos incluem recursos autônomos limitados e uma curva de aprendizado mais íngreme. Passei incontáveis horas no Betaflight Configurator ajustando configurações, o que pode ser intimidante para os iniciantes.
O Betaflight é melhor para corridas, freestyle e voos FPV em geral. Se você está principalmente interessado em voos acrobáticos ou corridas, é difícil superar.
INAV
O INAV se concentra em recursos de navegação e autônomos, e eu o uso em minhas construções de longo alcance e mapeamento. Seus modos GPS, retorno ao ponto de partida e recursos de waypoint são excelentes.
Os pontos fortes do INAV são seus recursos abrangentes de navegação e voo autônomo confiável. Já tive o INAV trazendo drones de volta de quilômetros de distância quando perdi o sinal de vídeo.
Seus pontos fracos incluem ser menos otimizado para voos de desempenho puro. Embora o INAV tenha melhorado seu desempenho acro, ainda não se compara ao Betaflight para corridas ou freestyle.
O INAV é melhor para voos de longo alcance, mapeamento e missões autônomas. Se você está interessado em exploração em vez de acrobacias, o INAV vale a pena considerar.
KISS
O KISS adota uma abordagem simplificada com ênfase em código limpo. Eu usei o KISS em algumas construções, e sua simplicidade é revigorante.
Os pontos fortes do KISS incluem configuração fácil e boas características de voo prontas para uso. Fiquei impressionado com o quão pouco ajuste foi necessário para fazer um quad alimentado por KISS voar bem.
Seus pontos fracos incluem ser de código fechado e ter opções de hardware limitadas. O ecossistema é menor, o que significa menos recursos quando surgem problemas.
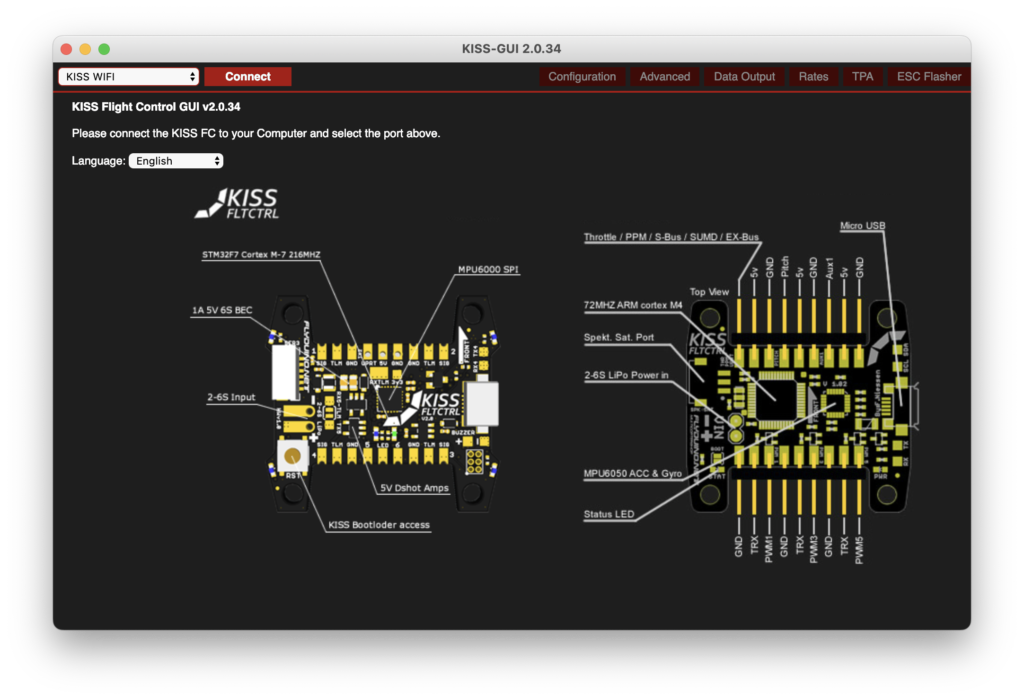
O KISS é melhor para pilotos que buscam simplicidade com bom desempenho. Se você quer passar mais tempo voando e menos tempo configurando, o KISS vale a pena dar uma olhada.
Emuflight
O Emuflight é um fork do Betaflight com abordagens alternativas para controle de voo. Experimentei-o em algumas construções, particularmente para voos cinematográficos.
Os pontos fortes do Emuflight incluem sua sensação de voo única e bom desempenho para certos estilos de voo. Achei-o particularmente bom para freestyle suave e fluido.
Seus pontos fracos incluem uma comunidade menor e atualizações menos frequentes. Quando surgem problemas, há menos recursos disponíveis em comparação com o Betaflight.
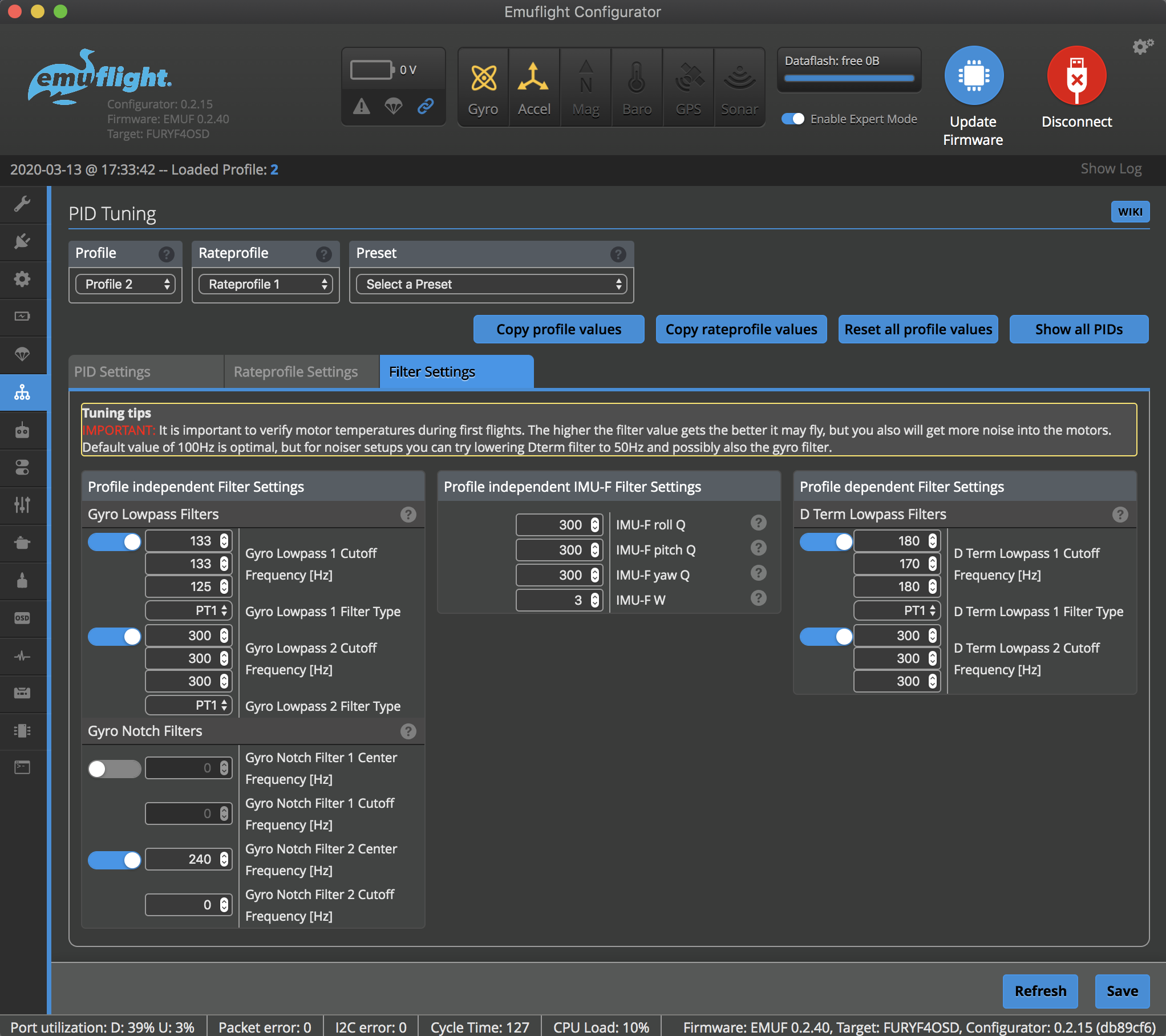
O Emuflight é melhor para pilotos que buscam características de voo específicas, particularmente aqueles que priorizam a suavidade sobre a capacidade de resposta absoluta.
Ardupilot/PX4
Ardupilot e PX4 são sistemas de piloto automático de código aberto de nível profissional. Eu os usei para trabalhos mais sérios de mapeamento e pesquisa.
Os pontos fortes desses sistemas incluem planejamento abrangente de missões e recursos profissionais. O nível de capacidade autônoma excede em muito o que está disponível em outras opções de firmware.
Seus pontos fracos incluem configuração complexa e menos otimização para agilidade. Esses não são sistemas que eu escolheria para freestyle ou corrida.
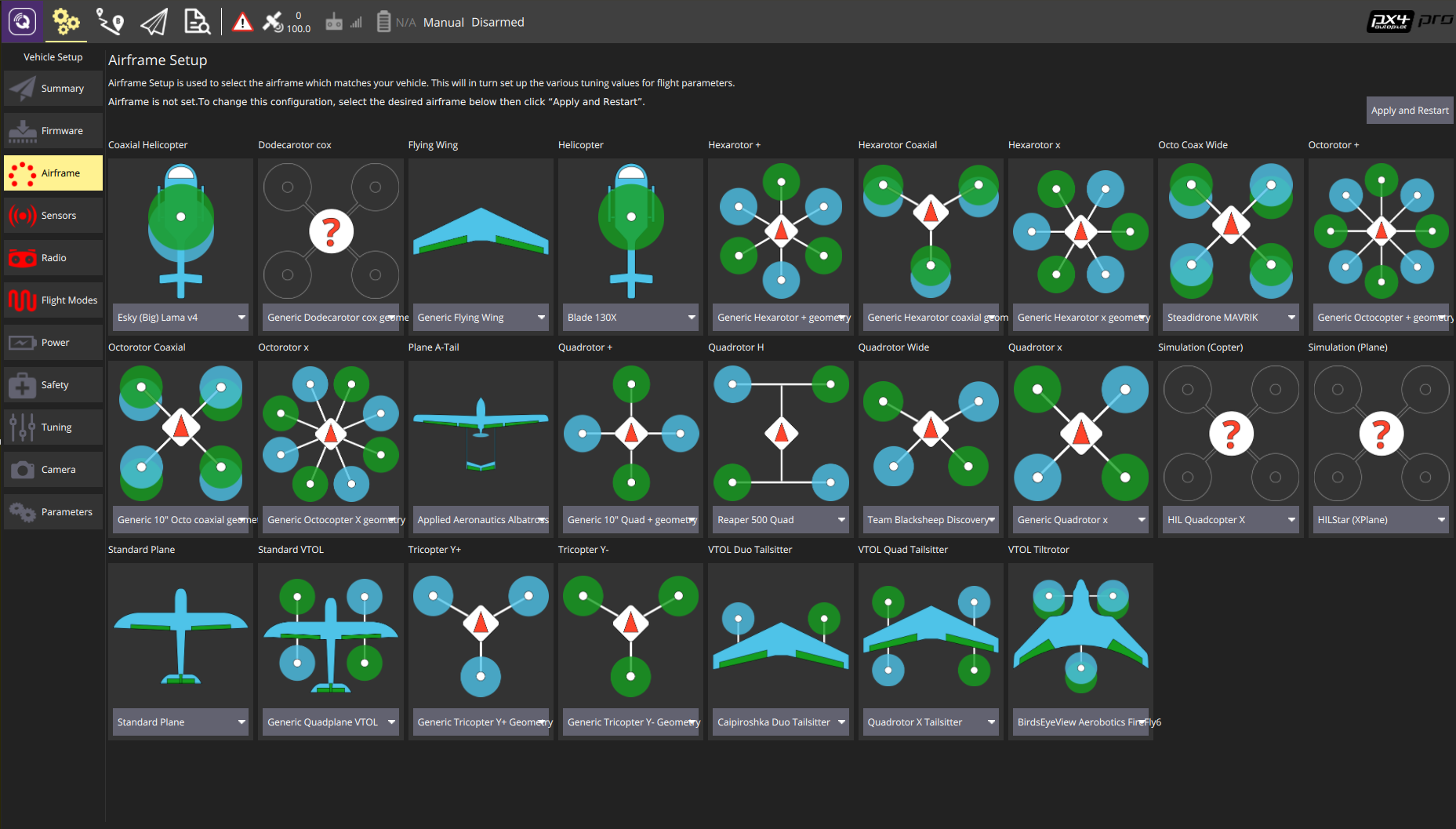
Ardupilot e PX4 são melhores para mapeamento, trabalhos de pesquisa e aplicações profissionais onde a confiabilidade e as capacidades autônomas são mais importantes do que a agilidade.
Comparação de Recursos de Firmware
Na minha experiência usando essas diferentes opções de firmware, desenvolvi uma noção de seus pontos fortes relativos em diferentes áreas:
| Recurso | Betaflight | INAV | KISS | Emuflight | Ardupilot |
|---|---|---|---|---|---|
| Modo Acro | ★★★★★ | ★★★★☆ | ★★★★★ | ★★★★★ | ★★★☆☆ |
| Modos GPS | ★★☆☆☆ | ★★★★★ | ★★☆☆☆ | ★★☆☆☆ | ★★★★★ |
| Opções OSD | ★★★★☆ | ★★★★☆ | ★★★☆☆ | ★★★★☆ | ★★★☆☆ |
| Facilidade de Configuração | ★★★☆☆ | ★★☆☆☆ | ★★★★★ | ★★★☆☆ | ★☆☆☆☆ |
| Suporte da Comunidade | ★★★★★ | ★★★★☆ | ★★★☆☆ | ★★★☆☆ | ★★★★☆ |
| Frequência de Atualização | ★★★★★ | ★★★★☆ | ★★☆☆☆ | ★★★☆☆ | ★★★★☆ |
| Opções de Hardware | ★★★★★ | ★★★★☆ | ★★☆☆☆ | ★★★★☆ | ★★★☆☆ |
Selecionando o Controlador de Voo Certo
A escolha do controlador de voo apropriado depende das suas necessidades específicas e requisitos de construção. Depois de construir dezenas de drones diferentes, desenvolvi algumas diretrizes para diferentes aplicações.
Para Drones de Corrida
Ao construir drones de corrida, priorizo desempenho, confiabilidade e simplicidade. Cada grama importa e recursos desnecessários apenas adicionam peso.
Recomendo um processador F4 ou F7 para altas taxas de loop. Embora o F7 tenha mais poder de processamento, muitos pilotos de corrida ainda usam placas F4 porque são mais leves e perfeitamente capazes de lidar com as demandas das corridas.
Para o giroscópio, prefiro a série MPU6000 ou ICM20602 pela confiabilidade. Um sinal de giroscópio limpo é fundamental para corridas, onde pequenas perturbações podem afetar o manuseio em altas velocidades.
O fator de forma deve ser 20×20mm para construções compactas ou 30,5×30,5mm para construções padrão. Mudei a maioria das minhas construções de corrida para 20×20mm para economizar peso e espaço.
Em termos de integração, uma pilha FC+ESC cria construções limpas com fiação mínima. Isso reduz o peso e o potencial de falhas na fiação, que são comuns em acidentes de corrida.
Para o firmware, uso exclusivamente o Betaflight otimizado para corridas. Os padrões melhoraram muito, mas ainda faço ajustes para o meu estilo de voo específico.
Alguns exemplos de controladores de voo com os quais tive sucesso em corridas incluem o iFlight SucceX-E F4/F7, T-Motor F7 e SpeedyBee F4/F7.
Para Drones Freestyle
Para drones freestyle, priorizo confiabilidade, um conjunto abrangente de recursos e desempenho. Essas construções sofrem mais abusos do que quaisquer outras, então a durabilidade é fundamental.
Recomendo um processador F7 para melhor filtragem e recursos. O poder de processamento extra ajuda na filtragem complexa, que é importante para as altas relações peso-potência comuns em construções freestyle.
O giroscópio deve ser bem isolado para um sinal limpo. O freestyle envolve manobras de alta potência que criam muita vibração, então um bom isolamento faz uma diferença significativa.
Um sensor de corrente preciso é importante para o gerenciamento da bateria. O voo freestyle pode envolver mudanças rápidas na demanda de energia, então saber o status da sua bateria é crucial.
A capacidade de Blackbox via flash integrado ou cartão SD é essencial para ajustes. Descobri que o ajuste adequado faz uma enorme diferença no desempenho do freestyle, e os dados do blackbox são a chave para um bom ajuste.
Um OSD completo fornece informações importantes durante o voo. Eu confio no meu OSD para me dizer quando é hora de pousar, o que é fácil de esquecer quando você está se divertindo com truques de freestyle.
Controladores de voo com os quais tive boas experiências para freestyle incluem o Matek F722-SE, Holybro Kakute F7 e Diatone Mamba F722.
Para Drones de Longo Alcance/Cinematográficos
Para aplicações de longo alcance e cinematográficas, priorizo confiabilidade, recursos de GPS e eficiência energética. Essas construções precisam ser confiáveis ao voar longe de casa.
Recomendo um processador F7 para lidar com GPS e outros periféricos. Os UARTs adicionais e o poder de processamento são valiosos para os múltiplos sistemas normalmente encontrados em construções de longo alcance.
Um barômetro é útil para manter a altitude e recursos relacionados. Ao voar longe, ter informações confiáveis de altitude é importante para navegação e gerenciamento de bateria.
Vários UARTs são necessários para GPS, telemetria, controle de câmera, etc. Minhas construções de longo alcance normalmente usam pelo menos 5-6 UARTs para vários sistemas.
O suporte ao firmware INAV é importante para recursos de navegação. Embora o Betaflight tenha recursos básicos de GPS, o INAV é muito superior para tarefas sérias de navegação.
A filtragem de energia limpa é essencial para tempos de voo prolongados. Voar a longa distância é tudo sobre eficiência, e energia limpa ajuda a maximizar o tempo de voo.
Controladores de voo que me serviram bem para essas aplicações incluem o Matek F765-WING, Holybro Kakute H7 e iFlight Beast H7.
Para Construções Micro
Ao construir micro drones, priorizo tamanho, peso e integração. Cada componente precisa ser o menor e mais leve possível.
O fator de forma deve ser 16×16mm ou 20×20mm para caber em frames compactos. Fiquei impressionado com o quão capazes esses pequenos controladores de voo se tornaram.
Designs AIO com ESCs integrados simplificam a construção e economizam espaço. Nas menores construções, componentes separados simplesmente não são práticos.
Componentes ultraleves são essenciais para um bom desempenho de voo. Um controlador de voo pesado em uma construção micro afetará notavelmente o manuseio.
Um design simplificado com apenas recursos essenciais ajuda a minimizar o peso. Recursos como barômetros e UARTs extras são frequentemente omitidos para economizar peso.
Controladores de voo que usei com sucesso em construções micro incluem o HGLRC Zeus F4/F7 AIO, BetaFPV F4 AIO e NamelessRC F4/F7 AIO.
Para Iniciantes
Para iniciantes, recomendo priorizar facilidade de uso, durabilidade e valor. Suas primeiras construções provavelmente sofrerão mais acidentes, então a resiliência é importante.
Um processador F4 é suficiente para aprender. Embora o F7 ofereça mais recursos, uma placa F4 fornecerá tudo o que um iniciante precisa a um custo menor.
Recursos de proteção, como revestimento conformal e design robusto, ajudam a sobreviver a acidentes. Sempre recomendo que os iniciantes apliquem revestimento conformal adicional em seus controladores de voo – é um seguro barato contra curtos-circuitos acidentais.
Boa documentação e recursos de suporte facilitam a curva de aprendizado. Alguns fabricantes fornecem documentação muito melhor do que outros, o que faz uma grande diferença quando você está aprendendo.
O firmware Betaflight com bons padrões permite o sucesso sem ajustes extensivos. As configurações padrão melhoraram drasticamente nos últimos anos, facilitando muito para os iniciantes alcançarem um bom desempenho de voo.
Opções econômicas oferecem bom valor sem recursos excessivos. Não há necessidade de gastar mais em recursos que você não usará enquanto aprende.
Controladores de voo que costumo recomendar para iniciantes incluem o iFlight SucceX-E F4, Matek F405-STD e JHEMCU GHF411.
Instalação e Configuração do Controlador de Voo
A instalação e configuração adequadas são cruciais para o desempenho ideal. Cometi todos os erros possíveis nessa área, então aprendi o que funciona e o que não funciona.
Instalação de Hardware
Considerações de Montagem
A orientação do seu controlador de voo é crítica – a seta deve apontar para frente, ou você pode configurar uma orientação diferente no software. Aprendi a verificar isso duas vezes antes de cada voo inaugural, pois é um erro fácil de cometer.
O isolamento de vibração através de montagem suave com ilhós ou fita de espuma faz uma diferença significativa no desempenho do voo. Eu uso montagem suave em todas as minhas construções agora – a melhoria nos dados do giroscópio é notável.
Para informações mais detalhadas sobre isolamento de vibração, veja:
Amortecimento de Vibração de Drone
A localização deve ser no centro de gravidade e protegida de colisões. Eu tento posicionar o controlador de voo no centro da estrutura, tanto para equilíbrio quanto para fornecer proteção máxima.
O acesso à porta USB é importante para configuração e atualizações. Eu já construí quadricópteros onde tive que desmontá-los parcialmente para conectar o USB – não é um erro que repetirei.
O fluxo de ar adequado para resfriar os componentes eletrônicos evita problemas de superaquecimento. Os controladores de voo podem ficar bem quentes, especialmente quando embalados próximos aos ESCs e transmissores de vídeo.
Melhores Práticas de Fiação
O roteamento limpo dos fios longe de componentes sensíveis reduz a interferência. Descobri que manter os fios de sinal longe dos fios de alimentação faz uma diferença perceptível no desempenho.
Conexões seguras através de soldagem adequada ou conectores de qualidade evitam falhas. Tive muitos acidentes causados por conexões ruins para fazer atalhos aqui novamente.
O alívio de tensão evita tensão nas juntas de solda e conectores. Uma pequena braçadeira de nylon ou um pouco de cola quente pode evitar problemas intermitentes frustrantes.
A separação dos fios de sinal dos fios de alimentação reduz o ruído. Eu sempre tento rotear os fios de sinal no lado oposto da pilha dos fios de alimentação.
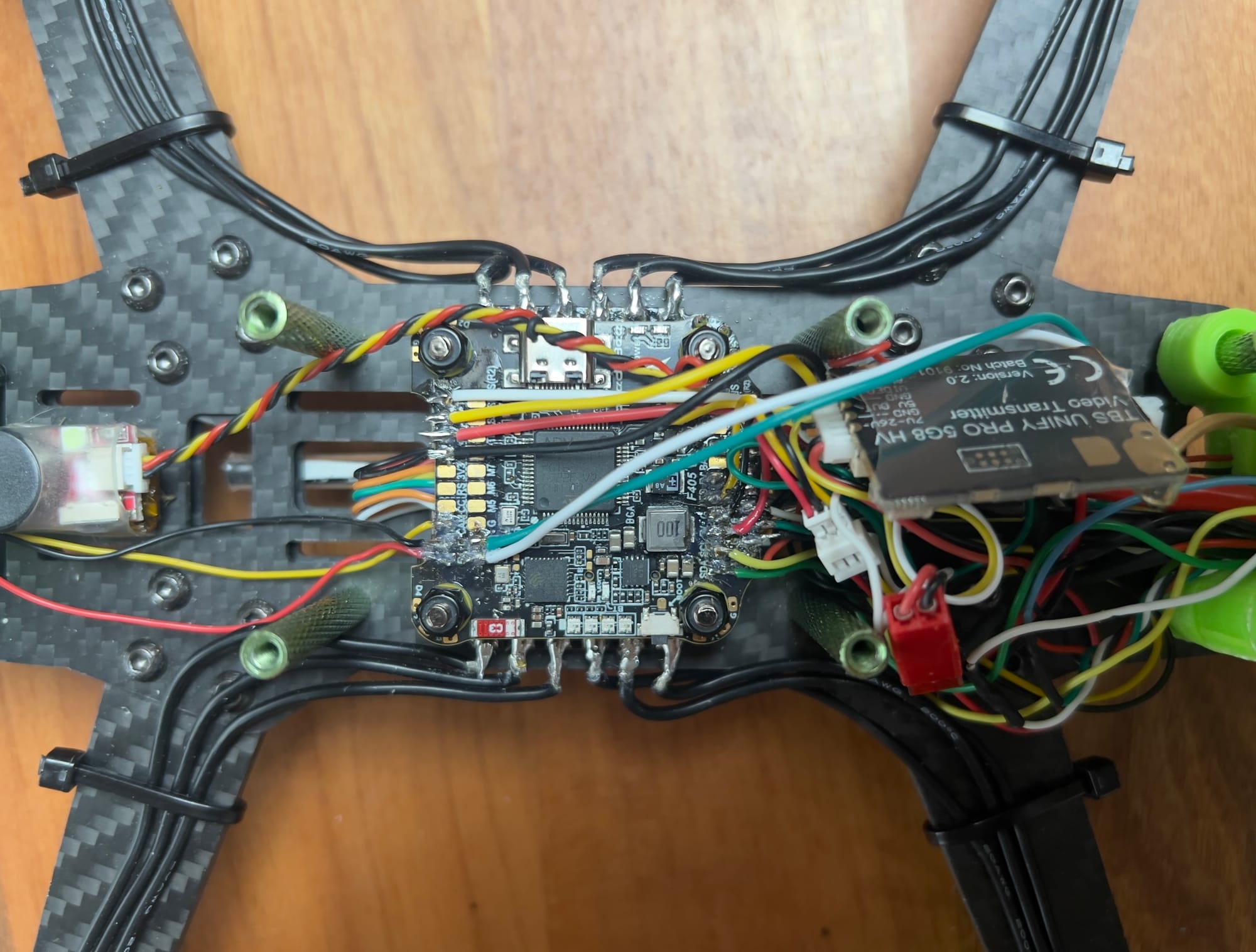
Minimizar o comprimento do fio reduz o ruído e o peso. Eu corto todos os fios no comprimento exato necessário – sem voltas extras ou folga.
Para informações mais detalhadas sobre fiação, veja:
Guia de Fiação de Drone
Configuração de Software
Processo de Configuração Inicial
O processo de configuração segue uma sequência lógica que refinei ao longo de muitas construções:
- Instalar o Software Configurador: Eu mantenho versões separadas para diferentes branches de firmware para evitar problemas de compatibilidade.
- Conectar o FC: Use um cabo USB de qualidade que suporte transferência de dados. Já rastreei muitos problemas misteriosos de conexão até cabos USB baratos ou danificados.
- Atualizar o Firmware: Atualize para a versão estável mais recente. Geralmente evito lançamentos bleeding-edge para construções das quais dependo – a estabilidade é mais importante do que os recursos mais recentes.
- Configuração Básica:
• Definir a orientação correta da placa
• Configurar UARTs para periféricos
• Configurar o protocolo do receptor
• Configurar o monitoramento da bateria - Configuração do Receptor:
• Vincular o receptor ao transmissor
• Verificar o mapeamento de canais
• Configurar o comportamento do failsafe (sempre testo isso antes do primeiro voo – já me salvou de flyaways mais de uma vez) - Configuração do Motor:
• Verificar a direção do motor (sempre com as hélices desligadas!)
• Configurar o protocolo ESC (DShot600 é minha recomendação para a maioria das construções)
• Verificar se há ruído ou vibração incomuns - Configuração do Modo de Voo:
• Configurar o interruptor de armar
• Configurar modos de voo adicionais
• Eu uso um layout de interruptor consistente em todos os meus modelos para evitar confusão - Configuração do OSD:
• Personalizar elementos de exibição na tela
• Posicionar elementos para visibilidade
• Configurar avisos e alarmes - Ajuste de PID:
• Comece com padrões ou predefinições
• Ajuste conforme necessário após os voos iniciais
Problemas Comuns de Configuração e Soluções
Ao longo dos anos, encontrei e resolvi inúmeros problemas de configuração. Aqui estão alguns dos problemas mais comuns e suas soluções:
Sem Conexão com o Configurador
Quando seu controlador de voo não se conecta ao configurador, pode ser incrivelmente frustrante. Encontrei várias causas potenciais:
• Drivers Incorretos/Ausentes: Muitas vezes o culpado. Aprendi a manter uma coleção de drivers para diferentes controladores de voo, pois o Windows em particular pode ser exigente.
• Portas/Cabos USB Danificados: Causam problemas misteriosos de conexão. Agora uso cabos USB de alta qualidade e tenho um cabo "conhecido como bom" dedicado para solução de problemas.
• Problemas do Modo de Bootloader: Às vezes, o controlador de voo fica preso no modo de bootloader. Desenvolvi uma rotina de curto-circuitar os pinos de inicialização e ciclar a energia para forçá-lo no modo correto.
• Porta COM Incorreta: Um erro simples que é fácil de cometer. Sempre verifico o gerenciador de dispositivos para confirmar qual porta o controlador de voo está usando.
Motores Girando na Direção Errada
Ter motores girando na direção errada é um problema comum com soluções simples:
• Trocar Fios do Motor: Você pode trocar quaisquer dois fios do motor para reverter a direção. Já fiz isso inúmeras vezes, embora exija ressoldar.
• Configuração do BLHeli: Usar o configurador BLHeli para reverter a direção do motor é mais fácil se você estiver usando ESCs BLHeli. Este é meu método preferido, pois não requer nenhuma alteração de hardware.
• Verificação Pré-Voo: Sempre verifique a ordem e a direção do motor no configurador antes do primeiro voo. Já bati mais de um quadricóptero por pular esta etapa.
Comportamento de Voo Instável
Quando seu quadricóptero não voa corretamente, há várias causas potenciais:
• Orientação Incorreta do FC: Um culpado comum. Uma vez passei horas solucionando problemas de comportamento errático apenas para perceber que tinha o controlador de voo girado 90 graus do que estava configurado no software.
• Problemas de Vibração: Podem causar todos os tipos de comportamento estranho. Tornei-me um forte defensor do isolamento adequado de vibrações depois de ver a diferença dramática que faz no desempenho do voo.
• Problemas de Ajuste de PID: Muitas vezes se manifestam como oscilações ou resposta lenta. Em caso de dúvida, redefino para PIDs padrão e começo de novo.
• Ruído do Giroscópio: Pode causar comportamento irregular e imprevisível. Descobri que as configurações adequadas de filtragem e um bom isolamento de hardware fazem uma diferença significativa.
Receptor Não Detectado
Quando seu receptor não está se comunicando com seu controlador de voo, verifique estes problemas comuns:
• Atribuição Incorreta de UART: O problema mais frequente. Sempre verifico duas vezes a qual UART o receptor está conectado e garanto que esteja configurado corretamente na guia Portas.
• Protocolo de Receptor Errado: Outro erro comum. O protocolo na guia Configuração deve corresponder ao seu tipo de receptor.
• Problemas de Vinculação: Podem causar falhas de comunicação. Aprendi a seguir cuidadosamente o procedimento de vinculação para cada tipo de receptor.
• Problemas de Fiação: Especialmente com conexões de sinal e aterramento, podem impedir a comunicação. Sempre verifico a continuidade com um multímetro se suspeito de problemas de fiação.
Tópicos Avançados do Controlador de Voo
Para pilotos experientes que buscam otimizar suas configurações, esses conceitos avançados fornecem insights mais profundos. Passei anos explorando essas áreas para obter o máximo de minhas construções.
Ajuste e Filtragem PID
O coração do desempenho do controlador de voo está no ajuste e filtragem PID. É aqui que a arte encontra a ciência no mundo FPV.
Noções Básicas de PID
Entender o controlador PID é fundamental para um bom ajuste:
P (Proporcional) fornece correção imediata ao erro. Eu penso nisso como a "força" da correção. Muito alto e você obtém oscilações; muito baixo e o quad parece lento.
I (Integral) acumula erro ao longo do tempo. Isso ajuda a superar forças persistentes como vento ou uma construção desequilibrada. Descobri que o termo I é frequentemente usado em excesso por iniciantes – um pouco já é suficiente.
D (Derivativo) responde à taxa de variação do erro. Isso amortece as correções do termo P e evita overshooting. Acertar o termo D é crucial para um voo suave – muito baixo e você obtém cantos saltitantes, muito alto e você obtém motores quentes.
Filtragem Avançada
A filtragem adequada faz uma enorme diferença no desempenho do voo:
A filtragem do giroscópio remove o ruído antes que ele chegue ao controlador PID. Aprendi que dados mais limpos do giroscópio levam a um melhor desempenho de voo e motores mais frios.
A filtragem do termo D é específica para o termo derivativo, que é particularmente sensível ao ruído. Presto atenção especial a isso, pois o ruído excessivo do termo D rapidamente leva a motores quentes.
A filtragem dinâmica de entalhe visa automaticamente as frequências de ruído do motor. Isso foi um divisor de águas para mim – ele se adapta a diferentes níveis de aceleração e reduz drasticamente o ruído sem adicionar latência.
A filtragem RPM usa a telemetria ESC para uma segmentação precisa do ruído. Quando ativei isso pela primeira vez em uma construção problemática, a diferença foi como o dia e a noite – de repente o quad estava suave como manteiga, sem motores quentes.
Os filtros estáticos visam fontes de ruído conhecidas em frequências fixas. Eu os uso com moderação, pois eles adicionam latência, mas são valiosos para resolver problemas específicos de ruído.
Abordagem de Ajuste de Filtro
Minha abordagem para o ajuste de filtro evoluiu ao longo do tempo:
Começo com padrões ou predefinições, que melhoraram muito nas versões recentes do Betaflight. Muitas vezes, eles são bons o suficiente para voos casuais.
Para um desempenho sério, analiso os logs do blackbox para identificar as características do ruído. Isso revela frequências específicas que precisam ser segmentadas.
Ajusto os filtros para segmentar ruídos específicos, mantendo a capacidade de resposta. Isso é um ato de equilíbrio – muita filtragem adiciona latência, pouca deixa ruído.
Testar incrementalmente com pequenas mudanças é crucial. Faço uma mudança de cada vez e testo completamente antes de prosseguir.
A chave é equilibrar a filtragem com a latência e a capacidade de resposta. A filtragem perfeita com muita latência parece pior do que um pouco de ruído com resposta nítida.
Registro e Análise do Blackbox
A gravação de dados de voo transformou a maneira como abordo o ajuste e a solução de problemas:
Configurando o Blackbox
As opções de armazenamento incluem flash a bordo vs. cartão SD. Prefiro cartões SD para trabalhos sérios de ajuste, pois eles fornecem muito mais capacidade.
As taxas de registro equilibram detalhes e duração. Para o ajuste inicial, uso taxas altas para capturar problemas sutis; para voos mais longos, reduzo a taxa.
Selecionar parâmetros relevantes para registrar ajuda a gerenciar o tamanho do arquivo. Concentro-me nos dados do giroscópio, valores PID e saídas do motor para a maioria dos trabalhos de ajuste.
Analisando Logs
O INAV e o Betaflight têm suas próprias ferramentas para exploração de logs do blackbox. Passei incontáveis horas olhando para esses gráficos, aprendendo a interpretar os padrões.

O PIDtoolbox é outra ferramenta poderosa para análise profunda dos logs do seu controlador de voo.
As principais métricas que procuro incluem traço do giroscópio (para ruído), resposta PID (para ajuste) e saídas do motor (para margem). As relações entre elas contam a história real de como seu quad está se saindo.
Identificar problemas fica mais fácil com a experiência. Aprendi a reconhecer as assinaturas de vários problemas – o ruído parece diferente dos problemas de PID, que parecem diferentes dos problemas mecânicos.
Usando Logs para Ajuste
A análise de ruído ajuda a identificar frequências que exigem filtragem. Procuro picos no gráfico FFT que correspondam às frequências do motor ou seus harmônicos.
A resposta ao degrau mostra a rapidez com que a aeronave responde às entradas. Quero ver uma resposta rápida sem overshoot excessivo.
A avaliação do termo P revela oscilações ou lentidão. Uma boa resposta do termo P mostra uma correção rápida sem continuar a balançar para frente e para trás.
O ruído do termo D é uma causa comum de motores quentes. Eu procuro por ruído amplificado no termo D que corresponde a picos de saída do motor.
A margem de manobra do motor garante que os motores não estejam atingindo o máximo. Eu quero ver pelo menos 20% de margem de manobra nas saídas do motor durante manobras agressivas.
CLI do Betaflight e Configuração Avançada
A interface de linha de comando fornece opções de configuração poderosas que não estão disponíveis na GUI:
Comandos Essenciais do CLI
diff all mostra todas as configurações que diferem dos padrões. Este é o meu comando preferido para verificar minha configuração e compartilhar configurações com outros.
dump exibe todas as configurações atuais, incluindo os padrões. Isso é útil para entender a configuração completa.
get [parameter] mostra valores de parâmetros específicos. Eu uso isso para verificar configurações individuais sem ter que percorrer toda a configuração.
set [parameter]=[value] altera os valores dos parâmetros. Isso permite um controle preciso sobre todos os aspectos do controlador de voo.
save confirma a configuração atual na memória. Aprendi da maneira mais difícil a usar isso depois de fazer alterações – esquecer significa perder todo o seu trabalho.
resource mostra a alocação de recursos para pinos e periféricos. Isso é essencial para configuração avançada e solução de problemas.
resource [resource_type] [index] [pin] reatribui recursos para diferentes pinos. Eu usei isso para liberar pinos para funções específicas ou contornar problemas de hardware.
status exibe informações de status do sistema. Isso é útil para verificar quais recursos estão ativos e como o sistema está configurado.
Remapeamento de Recursos
Reatribuir pinos para diferentes funções é uma capacidade poderosa:
As saídas do motor podem ser movidas para diferentes pinos. Eu usei isso para contornar pads danificados em controladores de voo.
A reatribuição de UART permite mover portas seriais para diferentes pinos. Isso me salvou quando os pinos UART padrão estavam danificados ou eram necessários para outra função.
O controle de LED pode ser configurado para diferentes pinos. Eu usei isso para adicionar fitas de LED a construções onde o pino de LED padrão não estava disponível.
Funções especiais como controle de câmera e saídas de buzzer podem ser reatribuídas. Essa flexibilidade me permitiu adicionar recursos a construções que de outra forma não os suportariam.
Configurações de Mixer Personalizadas
Para layouts de motor não padrão, mixers personalizados são essenciais:
Mixagens personalizadas de motor ajustam a influência do motor em cada eixo. Eu usei isso para construções incomuns, como frames assimétricos ou suportes de câmera pesados.
Configurações especializadas como tricópteros e caudas em V requerem mixagem personalizada. O mixer padrão funciona para quads padrão, mas qualquer coisa incomum precisa de personalização.
A linearização de empuxo melhora a resposta do acelerador, compensando as características não lineares do motor. Isso torna o acelerador mais consistente em toda a faixa.
Compilação e Personalização de Firmware
A construção de firmware personalizado permite otimizações específicas:
Por que Compilar Firmware Personalizado
Habilitar recursos experimentais fornece acesso a capacidades de ponta. Eu compilei firmware personalizado para testar novos recursos antes de serem lançados oficialmente.
Otimizar para hardware específico pode melhorar o desempenho. Remover componentes desnecessários libera poder de processamento para o que importa.
Personalizar padrões define seu ponto de partida preferido. Eu mantenho uma compilação personalizada com minhas configurações preferidas incorporadas.
Corrigir bugs às vezes requer a implementação de patches antes dos lançamentos oficiais. Eu compilei firmware personalizado para resolver problemas específicos que afetaram minhas compilações.
Processo de Compilação
Configurar o ambiente de desenvolvimento requer Git, um toolchain e outras dependências. Eu mantenho uma VM de desenvolvimento dedicada para esse propósito.
Clonar o repositório fornece o código-fonte com o qual trabalhar. Eu sempre verifico o branch ou tag específico do qual quero compilar.
Configurar a compilação envolve selecionar o alvo e os recursos. É aqui que você pode personalizar o que está incluído no seu firmware.
Compilar constrói o firmware a partir do código-fonte. Computadores modernos tornam esse processo bastante rápido.
Flashear carrega o firmware compilado para o seu controlador de voo. Eu sempre faço um backup do firmware original antes de flashear compilações personalizadas.
Personalizações Comuns
Modificações de alvo permitem ajustes específicos de hardware. Eu modifiquei alvos para corresponder melhor ao hardware específico que estou usando.
Alternâncias de recursos habilitam ou desabilitam capacidades específicas. Remover recursos que você não usa libera recursos para o que importa.
Alterações padrão modificam a configuração inicial. Eu defino meus padrões preferidos para PIDs, taxas e outras configurações.
Otimizações de desempenho se ajustam para casos de uso específicos. Compilações de corrida se beneficiam de otimizações diferentes das compilações de longo alcance.
Solucionando Problemas do Controlador de Voo
Mesmo os melhores controladores de voo podem desenvolver problemas. Veja como eu diagnostico e resolvo problemas comuns:
Solução de Problemas de Hardware
Problemas de Energia
Quando seu FC não liga ou experimenta reinicializações aleatórias, verifique essas causas comuns:
A saída do regulador de tensão deve ser limpa e estável. Eu uso um multímetro para verificar a tensão adequada nos pontos de teste.
A conexão e a tensão da bateria precisam estar dentro da faixa de operação do FC. Eu danifiquei controladores de voo conectando baterias de tensão mais alta do que eles foram projetados para suportar.
Adicionar ou substituir capacitores de filtragem pode resolver muitos problemas relacionados à energia. Eu adiciono um capacitor de baixo ESR a quase todas as construções como um seguro barato contra problemas de energia.
Curtos-circuitos podem causar problemas misteriosos de energia. Eu uso um multímetro no modo de continuidade para verificar se há curtos entre a alimentação e o terra.
A capacidade adequada de fornecimento de energia é essencial, especialmente para construções com muitos periféricos. Eu vi problemas em que o FC ligava bem sozinho, mas falhava quando todos os componentes estavam conectados.
Problemas de Sensor
Quando os sensores fornecem leituras erráticas ou estabilização ruim:
Recalibrar os sensores geralmente resolve problemas menores. Eu me certifico de que o quad esteja perfeitamente nivelado durante a calibração do acelerômetro.
Danos físicos podem afetar o desempenho do sensor. Eu tive que substituir controladores de voo depois que quedas duras danificaram o giroscópio.
Melhorar o isolamento de vibração faz uma diferença significativa no desempenho do sensor. Agora eu uso montagem macia em todas as minhas construções.
Atualizações de firmware às vezes resolvem problemas de sensor. Eu vi bugs em versões específicas de firmware que afetaram as leituras do sensor.
Se os sensores estiverem danificados além do reparo, substituir o controlador de voo é a única opção. Eu mantenho controladores de voo sobressalentes para minhas construções principais por esse motivo.
Falhas de Conexão
Quando os periféricos não são detectados ou a comunicação é intermitente:
Verificar a fiação e as conexões é o primeiro passo. Eu uso uma lupa para inspecionar pequenas juntas de solda e conexões.
Verificar as configurações de UART garante que os protocolos certos estejam habilitados nas portas certas. Eu passei horas solucionando problemas apenas para descobrir que habilitei o recurso errado em um UART.
Testar com diferentes cabos pode identificar problemas de conexão. Eu mantenho cabos USB conhecidos especificamente para solução de problemas.
Pinos ou juntas de solda danificados geralmente causam problemas intermitentes. Eu consertei muitos problemas refazendo juntas de solda que pareciam boas a olho nu.
Os níveis de sinal e protocolos devem corresponder entre os dispositivos. Eu tive problemas onde dispositivos de 3,3V e 5V não estavam se comunicando corretamente devido a incompatibilidade de tensão.
Solução de problemas de software
Problemas de Firmware
Quando o firmware trava, congela ou se comporta de forma inesperada:
Atualizar para o firmware estável mais recente geralmente resolve problemas conhecidos. Eu geralmente evito lançamentos bleeding-edge para builds dos quais dependo.
Experimentar diferentes versões de firmware pode contornar bugs específicos. Eu tive que fazer downgrade do firmware para evitar problemas que afetavam minha configuração específica.
Redefinir para os padrões e reconfigurar do zero às vezes resolve problemas misteriosos. Isso geralmente é mais rápido do que tentar rastrear uma configuração problemática específica.
Refazer o flash com apagamento completo do chip limpa quaisquer configurações ou memória corrompida. Eu uso isso como último recurso quando outras soluções falham.
Problemas de compatibilidade de hardware podem causar comportamento inesperado. Eu verifico a lista de alvos suportados antes de atualizar o firmware.
Problemas de configuração
Quando seu quad não responde corretamente às entradas ou os recursos não são ativados:
Verificar todas as configurações é tedioso, mas eficaz. Eu passo por cada aba no configurador metodicamente.
Redefinir para os padrões e reconfigurar geralmente resolve problemas com configurações conflitantes. Às vezes é mais rápido do que tentar encontrar o problema específico.
Verificar as atribuições do switch de modo garante que eles estão ativando conforme o esperado. Eu uso a aba do receptor para verificar se as posições do switch estão sendo reconhecidas corretamente.
Verificar o mapeamento do canal do receptor é crucial para o controle adequado. Eu tive problemas em que os canais foram mapeados incorretamente, causando comportamento estranho.
Exportar e revisar a configuração pode ajudar a identificar problemas. Eu comparo as configurações entre builds funcionais e não funcionais para detectar diferenças.
Problemas de ajuste de desempenho
Quando seu quad oscila, responde lentamente ou os motores esquentam:
Redefinir os PIDs para os padrões fornece um ponto de partida conhecido. Eu faço isso sempre que faço mudanças significativas em um build.
Verificar as configurações do filtro garante que elas sejam apropriadas para o seu build. Muita filtragem causa latência; pouca deixa ruído.
Verificar problemas mecânicos, como componentes soltos ou hélices danificadas, é essencial. Eu já persegui problemas de ajuste que na verdade eram causados por uma estrutura rachada.
Analisar logs da blackbox fornece insights sobre problemas específicos. Esta é a ferramenta de solução de problemas mais poderosa para problemas de desempenho.
Aplicar predefinições apropriadas para o seu tipo de build geralmente resolve problemas comuns. As predefinições nas versões recentes do Betaflight são muito boas.
Quando substituir um controlador de voo
Às vezes, a substituição é a única opção. Eu substituo controladores de voo quando:
Danos físicos afetam o desempenho, especialmente em componentes críticos como o giroscópio ou processador. Eu tentei salvar placas danificadas, mas raramente vale o esforço.
Os sensores falharam ou se tornaram não confiáveis. Um controlador de voo com um giroscópio não confiável é perigoso para voar.
Problemas de processador ou memória causam instabilidade. Se o seu controlador de voo reinicia ou trava aleatoriamente, é hora de substituí-lo.
Atualizar para acessar novos recursos às vezes requer novo hardware. Eu já substitui controladores de voo perfeitamente funcionais para obter acesso a recursos que exigiam hardware mais recente.
Após danos significativos por água ou eletricidade, a substituição geralmente é mais segura do que o reparo. Eu aprendi essa lição depois de tentar salvar um controlador de voo que tinha se molhado - funcionou por um tempo, depois falhou catastroficamente no meio do voo.
Tendências futuras em controladores de voo
O cenário dos controladores de voo continua evoluindo rapidamente. Aqui está para onde eu vejo as coisas caminhando:
Avanços de hardware
Processadores H7 e mais poderosos estão se tornando o novo padrão. Eu tenho testado controladores de voo H7 e, embora as diferenças sejam sutis agora, eles fornecem espaço para recursos futuros.
Sensores aprimorados com níveis de ruído mais baixos melhorarão o desempenho de voo. Cada geração de giroscópios fica melhor em rejeitar ruído enquanto mantém a sensibilidade.
A integração está aumentando, com mais soluções tudo-em-um. A tendência para stacks de voo altamente integrados continuará, tornando os builds mais limpos e simples.
A redução de tamanho continua, com componentes cada vez menores e mais leves. Estou impressionado com quanta funcionalidade cabe nos controladores de voo modernos de 16×16mm.
Melhorias na eficiência energética proporcionam melhor desempenho por watt. Isso é particularmente importante para builds de longo alcance e resistência.
Inovações de software
O aprendizado de máquina para ajuste adaptativo e filtragem está no horizonte. Eu vi experimentos iniciais com ajuste baseado em ML que mostram promessa para otimizar automaticamente o desempenho.
Os recursos avançados de autonomia estão melhorando, com melhores capacidades de GPS e navegação. A lacuna entre as capacidades de drones amadores e profissionais está diminuindo.
A configuração simplificada com configuração mais intuitiva está tornando o hobby mais acessível. A curva de aprendizado está ficando menos íngreme a cada geração de firmware.
Opções de firmware especializadas adaptadas a estilos de voo específicos estão surgindo. Estamos vendo mais divergência entre firmware de corrida, estilo livre e longo alcance.
Padrões aprimorados significam uma melhor experiência pronta para uso. Os controladores de voo modernos voam notavelmente bem com as configurações padrão.
Tecnologias emergentes
A visão computacional para navegação baseada em câmera e desvio de obstáculos está se tornando mais acessível. Eu experimentei sistemas de visão básicos e eles estão se tornando mais práticos para uso amador.
A rede em malha permite a comunicação drone-para-drone. Isso abre possibilidades para voo coordenado e segurança aprimorada.
A telemetria avançada fornece dados de voo mais abrangentes. A quantidade de informações disponíveis para os pilotos continua aumentando.
A integração com a nuvem para configuração e análise de dados está se tornando mais comum. Plataformas online para compartilhamento e análise de dados de voo estão surgindo.
A integração de simulação com gêmeos digitais permite testes em ambientes virtuais. Eu usei simulação para testar configurações antes de aplicá-las ao hardware real.
Perguntas frequentes: Dúvidas comuns sobre controladores de voo
Ao longo dos anos, recebi inúmeras perguntas sobre controladores de voo. Aqui estão as mais comuns:
Qual é a diferença entre controladores de voo F4 e F7?
F4 e F7 se referem à série de processadores STM32 usados no controlador de voo. Na minha experiência, as principais diferenças são:
Os processadores F7 são mais poderosos (normalmente 216-400MHz vs. 168-216MHz para F4), permitindo taxas de loop mais altas, filtragem mais complexa e recursos adicionais. Eu percebo mais a diferença em situações exigentes com muita filtragem.
Os controladores F7 geralmente têm mais UARTs e melhor desempenho geral. Isso é importante quando você está conectando vários periféricos, como GPS, telemetria e controle de câmera.
Os controladores F4 são mais acessíveis e ainda suficientes para a maioria dos estilos de voo. Muitos dos meus builds ainda usam placas F4 porque elas oferecem um ótimo equilíbrio entre desempenho e custo.
Para a maioria dos pilotos, um F4 é perfeitamente adequado, mas se você está empurrando os limites de desempenho ou precisa conectar muitos periféricos, um F7 vale a pena o upgrade.
Como eu sei se meu controlador de voo está danificado?
Sinais de um controlador de voo danificado incluem:
Falha ao ligar ou conectar via USB é o sinal mais óbvio. Se seu FC não ligar ou não for reconhecido pelo seu computador, algo está errado.
Leituras erráticas dos sensores ou deriva podem indicar danos no giroscópio. Eu vi isso após quedas duras - o quad se torna impossível de voar devido a movimentos aleatórios.
Reinicializações inesperadas ou congelamentos sugerem problemas no processador ou na memória. Se seu quad desarmar aleatoriamente no meio do voo, o controlador de voo pode estar falhando.
Fumaça ou danos visíveis aos componentes é um indicador claro. Eu já liberei a fumaça mágica de mais de um controlador de voo.
Superaquecimento durante a operação pode indicar danos internos ou curtos-circuitos. Se seu FC ficar excepcionalmente quente, algo está errado.
Erros persistentes no configurador geralmente apontam para problemas de hardware. Se você ver o mesmo erro repetidamente, apesar de atualizar o firmware, suspeite de problemas de hardware.
Falha ao armar ou manter voo estável, apesar da configuração adequada, sugere problemas no sensor. Eu já tive controladores de voo que passaram em todos os testes na bancada, mas falharam no ar.
Qual controlador de voo é melhor para um iniciante?
Para iniciantes, eu recomendo controladores de voo que sejam:
Confiáveis e bem suportados, como o iFlight SucceX-E F4 ou Matek F405-STD. Estes resistiram ao teste do tempo e têm grandes comunidades de usuários.
Preços razoáveis (em torno de $30-40) para equilibrar qualidade com restrições orçamentárias. Não há necessidade de gastar em recursos de ponta enquanto aprende.
Compatível com Betaflight para fácil configuração e extensa documentação. O ecossistema Betaflight tem mais recursos para iniciantes.
Bem documentado com bom suporte da comunidade para solução de problemas. Quando você inevitavelmente encontrar problemas, ter recursos para ajudar é inestimável.
Durável o suficiente para sobreviver a quedas de aprendizado. Eu procuro placas com revestimento conformal e design robusto.
Incluindo recursos essenciais sem complexidade esmagadora. Recursos como OSD e monitoramento de corrente são úteis, mas recursos avançados podem esperar.
Processadores F4 são tipicamente suficientes para iniciantes, com F7 sendo uma opção para aqueles que querem mais espaço para crescer. Eu comecei com processadores F1 e estava perfeitamente feliz até saber o suficiente para apreciar as vantagens de hardware mais avançado.
Posso usar qualquer controlador de voo com qualquer ESC?
A maioria dos controladores de voo modernos pode funcionar com a maioria dos ESCs, mas existem considerações de compatibilidade:
O suporte a protocolos é crítico - certifique-se de que o FC e os ESCs suportam os mesmos protocolos (DShot, Multishot, etc.). Eu prefiro DShot600 para a maioria das construções, pois oferece um bom equilíbrio entre desempenho e confiabilidade.
A compatibilidade de tensão é importante - verifique se o FC pode lidar com a tensão fornecida pelos ESCs/PDB. Eu já danifiquei controladores de voo conectando-os a tensões mais altas do que eles foram projetados para suportar.
As conexões físicas variam entre fios individuais e cabos de fita. Certifique-se de que seu FC e ESCs tenham métodos de conexão compatíveis.
Para pilhas FC/ESC, certifique-se de que elas foram projetadas para trabalhar juntas. Embora a mistura e combinação seja possível, as pilhas projetadas como uma unidade geralmente oferecem melhor integração.
Geralmente, qualquer FC de qualidade pode funcionar com qualquer ESC de qualidade, se configurado corretamente, mas a correspondência de componentes geralmente fornece a melhor experiência. Eu prefiro usar componentes do mesmo fabricante quando possível, pois eles são projetados para trabalhar juntos.
Com que frequência devo atualizar o firmware do meu controlador de voo?
Não há um cronograma fixo para atualizações de firmware, mas eu sigo estas diretrizes:
Se tudo funciona bem, não se sinta obrigado a atualizar imediatamente. O velho ditado "se não está quebrado, não conserte" se aplica aqui.
Atualize para novos recursos quando uma versão contiver recursos que você deseja. Eu atualizei para o Betaflight 4.3 especificamente para a filtragem RPM aprimorada.
Atualize para correções de bugs se você estiver enfrentando problemas abordados em uma nova versão. Eu verifico as notas de lançamento para ver se elas abordam os problemas que estou tendo.
Para versões principais, eu espero algumas semanas após o lançamento para obter feedback da comunidade. Deixe os outros encontrarem os bugs primeiro.
Evite atualizar logo antes de corridas ou viagens importantes. Eu aprendi essa lição da maneira mais difícil - uma atualização de última hora pode introduzir problemas inesperados.
Sempre faça backup da sua configuração antes de atualizar e esteja preparado para gastar tempo reconfigurando após atualizações significativas. Eu mantenho anotações sobre minhas configurações específicas para cada quad para tornar esse processo mais fácil.
O que causa ruído no giroscópio do controlador de voo?
O ruído do giroscópio pode vir de várias fontes:
Vibração mecânica de motores, hélices ou ressonância da estrutura é a causa mais comum. Descobri que o balanceamento adequado de hélices e motores faz uma diferença significativa.
Ruído elétrico de ESCs, sistemas de energia ou fiação pode afetar as leituras do giroscópio. Manter os fios de sinal longe dos fios de alimentação ajuda a reduzir isso.
As limitações do sensor criam um nível de ruído inerente. Diferentes modelos de giroscópio têm características de ruído diferentes.
Problemas de montagem, como isolamento inadequado ou montagem rígida, transmitem vibrações diretamente para o giroscópio. Agora eu uso montagem macia em todas as minhas construções.
Componentes danificados podem causar aumento de ruído. Um giroscópio que foi submetido a quedas duras pode desenvolver níveis de ruído mais altos.
A redução de ruído normalmente envolve melhor isolamento de vibração, fiação aprimorada, componentes de qualidade e configurações de filtragem apropriadas. Eu resolvo os problemas mecânicos primeiro e depois uso a filtragem de software para lidar com o ruído restante.
Posso transferir configurações entre controladores de voo?
Sim, mas com limitações:
A transferência de configurações funciona melhor entre o mesmo tipo de firmware (por exemplo, Betaflight para Betaflight). Eu tive resultados mistos tentando transferir configurações entre diferentes tipos de firmware.
Hardware semelhante fornece melhores resultados ao transferir configurações. Mover de uma placa F4 para outra placa F4 semelhante geralmente funciona bem.
Usar o comando diff all para salvar as configurações é o método mais confiável. Eu salvo essa saída em um arquivo de texto para cada uma das minhas construções.
Os recursos de backup do configurador funcionam bem para hardware idêntico. Isso é conveniente, mas menos flexível do que os comandos CLI.
Algumas configurações sempre precisam de ajuste manual para novo hardware. Os mapeamentos de recursos, em particular, são específicos do hardware e não são transferidos bem.
Sempre revise as configurações transferidas cuidadosamente, pois configurações incorretas podem causar comportamento inesperado ou falhas. Eu passo por cada guia no configurador após transferir as configurações para verificar se tudo parece correto.
Qual é a diferença entre filtragem de giroscópio por hardware e software?
A distinção é importante para entender como otimizar o desempenho:
A filtragem por hardware é implementada no próprio sensor do giroscópio, fornecendo redução inicial de ruído antes que o sinal chegue ao processador. Isso varia entre os modelos de giroscópio e não pode ser ajustado no firmware.
A filtragem por software é implementada no firmware do controlador de voo e é personalizável através da configuração. Isso inclui filtros de entalhe dinâmicos, filtros passa-baixa e filtragem baseada em RPM.
Os controladores de voo modernos usam uma combinação de ambas as abordagens. Eu confio na filtragem de hardware como a primeira linha de defesa e, em seguida, uso a filtragem de software para lidar com as características específicas de ruído da minha construção.
A vantagem da filtragem de software é a flexibilidade – ela pode ser ajustada para construções e estilos de voo específicos. A desvantagem é que ela usa poder de processamento e pode introduzir latência.
Conclusão
O controlador de voo é realmente o cérebro do seu drone FPV, traduzindo suas intenções em voo preciso. Depois de anos construindo e voando, passei a apreciar o quão crítico esse componente é para a experiência geral.
Entender a tecnologia do controlador de voo, os critérios de seleção e as opções de configuração permite que você otimize o desempenho para suas necessidades e estilo de voo específicos. Seja você esteja construindo seu primeiro drone ou o quinquagésimo, escolher o controlador de voo certo e configurá-lo adequadamente terá um impacto profundo na sua experiência de voo.
A tecnologia continua evoluindo rapidamente, com processadores mais poderosos, melhores sensores e firmware mais sofisticado fornecendo plataformas cada vez mais capazes. Ao dominar a configuração e o ajuste do controlador de voo, você desbloqueará todo o potencial do seu drone, alcançando o equilíbrio perfeito de estabilidade, capacidade de resposta e recursos para seu estilo de voo único.
Eu já quebrei mais drones do que gostaria de admitir na minha jornada para entender esses dispositivos complexos, mas cada falha me ensinou algo valioso. A satisfação de um quad perfeitamente ajustado respondendo exatamente como pretendido torna toda a solução de problemas válida. Não há nada como a sensação de um drone que parece uma extensão dos seus pensamentos, e o controlador de voo é o que torna isso possível.


