Controllori di Volo per Droni: Principi e Funzionamento
Il flight controller (FC) è il cervello del tuo drone FPV, che traduce i tuoi input di controllo nei precisi comandi motore necessari per il volo. Elabora i dati provenienti da vari sensori, esegue algoritmi complessi e apporta centinaia di regolazioni al secondo per mantenere il tuo drone stabile e reattivo. Questa guida completa esplora la tecnologia dei flight controller, le opzioni del firmware, i criteri di selezione, le procedure di configurazione e le funzionalità avanzate per aiutarti a comprendere e ottimizzare questo componente critico.
Introduzione ai Flight Controller
Dopo anni di costruzione e volo di droni FPV, ho imparato ad apprezzare che nessun singolo componente influenza la tua esperienza di volo più del flight controller. Ricordo ancora la mia prima build con una primitiva scheda KK che a malapena manteneva il drone stabile. Facendo un salto in avanti ad oggi, i sofisticati processori H7 nei moderni flight controller stanno eseguendo calcoli complessi che sarebbero sembrati fantascienza solo pochi anni fa.

Un flight controller è una scheda circuitale specializzata contenente un microprocessore, vari sensori e connessioni di input/output. Funge da unità di elaborazione centrale del tuo drone, svolgendo diverse funzioni critiche:
• Stabilizzazione: Mantenere il volo livellato e compensare le forze esterne
• Elaborazione degli Input di Controllo: Tradurre i movimenti dello stick in comandi motore
• Integrazione dei Sensori: Raccogliere ed elaborare i dati da giroscopi, accelerometri, ecc.
• Gestione delle Funzionalità: Gestire modalità come acro, angle, GPS hold e altro
• Comunicazione con le Periferiche: Interfacciarsi con ricevitori, ESC, telecamere e altri componenti
L'Evoluzione dei Flight Controller
Ho assistito alla drammatica evoluzione dei flight controller da quando ho iniziato il mio hobby nel 2019.
Tutto è iniziato con processori a 8 bit di base che potevano a malapena gestire una semplice stabilizzazione. Il salto ai controller a 32 bit intorno al 2014 è stato rivoluzionario - improvvisamente i quad erano capaci di un controllo molto più preciso e di funzionalità avanzate. La progressione è stata notevole:
• Primi FC (2010-2013): Stabilizzazione di base con funzionalità limitate. Le build con una scheda MultiWii richiedevano un'attenzione costante solo per mantenere il volo livellato.
• Rivoluzione a 32 bit (2014-2016): Elaborazione più veloce e algoritmi migliori. Il Naze32 è stato un game-changer - improvvisamente i quad sembravano macchine completamente diverse.
• Era Moderna (2017-presente): Potenti processori F4/F7 e componenti integrati. Ho scoperto che questi moderni flight controller possono gestire filtraggi complessi e loop rate elevati che rendono anche il freestyle aggressivo fluido come il burro.
• Prossima Generazione (2023+): Processori H7 con capacità di machine learning e fusione dei sensori migliorata. Questi sono controller all'avanguardia e la differenza nelle prestazioni di volo è sottile ma percettibile, specialmente in condizioni impegnative.
Questa progressione ha portato a flight controller più piccoli e capaci, con funzionalità e prestazioni sempre più sofisticate. Ricordo ancora i tempi in cui un flight controller aveva le dimensioni di una carta di credito - ora sono spesso più piccoli di un francobollo pur facendo molto di più.
Componenti di Base di un Flight Controller
I moderni flight controller integrano diversi componenti chiave che lavorano insieme per creare l'esperienza di volo. Permettimi di guidarti attraverso ciò che ho imparato su questi componenti in anni di costruzione e risoluzione dei problemi.
Microprocessore
L'unità di elaborazione centrale è tipicamente un processore STM32 e il tipo fa una differenza significativa nelle prestazioni. Ho volato con tutto, dai processori F1 agli H7, ed ecco cosa ho scoperto:
• Processori F1: Vecchi chip a 32 bit ormai obsoleti. Li ho pilotati alcune volte per divertimento e, sebbene facessero il loro lavoro, le limitazioni erano frustranti.
• Processori F3 (72MHz): Ormai in gran parte obsoleti, ma sono stati un solido passo avanti rispetto agli F1. Ho pilotato una build basata su F3 ed è stata davvero soddisfacente.
• Processori F4 (168-216MHz): Ancora comuni e perfettamente in grado di gestire la maggior parte degli stili di volo. Uso ancora una scheda F4 in una build educativa perché offrono un ottimo equilibrio tra prestazioni e costo.
• Processori F7 (216-400MHz): Lo standard attuale, con una potenza di elaborazione extra che si nota in situazioni impegnative. Quando ho passato il mio principale quad freestyle a un F7, ho immediatamente notato il miglioramento nella gestione di filtraggi complessi e loop rate più elevati.
• Processori H7 (400-480MHz): Emergono come l'opzione di fascia alta. Ne sto testando uno nella mia build da gara e, sebbene le differenze siano sottili, il margine per le funzionalità future è significativo.
Il processore determina la potenza di calcolo del flight controller, influenzando la sua capacità di eseguire algoritmi complessi e mantenere loop time elevati. Ho imparato che, sebbene il processore non sia tutto, stabilisce il limite massimo di ciò che il tuo flight controller può raggiungere.
Sensori
I sensori su un flight controller sono essenziali per la stabilità del volo e l'implementazione delle funzionalità. Ho fatto schiantare più di qualche drone a causa di problemi ai sensori, quindi ho imparato a prestare molta attenzione a questo aspetto.
• Giroscopio: Misura le velocità di rotazione attorno a tre assi (beccheggio, rollio, imbardata). Questo è il sensore più critico e ho scoperto che la qualità del giroscopio fa una differenza percepibile nelle prestazioni di volo. Un giroscopio rumoroso porta a un comportamento nervoso e imprevedibile che nessuna messa a punto può risolvere completamente.
• Accelerometro: Misura l'accelerazione lineare ed è cruciale per la modalità angolo. Raramente uso la modalità angolo di questi tempi, ma quando lascio provare a un amico a pilotare uno dei miei droni, sono grato per un accelerometro ben calibrato.
• Barometro: Misura la pressione atmosferica per la stima dell'altitudine. Ho trovato che questi sono altalenanti in termini di affidabilità - sono influenzati dal propwash e dalle condizioni meteorologiche variabili. Per un serio mantenimento dell'altitudine, preferisco il GPS.
• Magnetometro (Bussola): Determina l'orientamento rispetto al nord magnetico. Nella mia esperienza, questi sono altamente suscettibili alle interferenze dei sistemi di alimentazione e dei motori. Li monto sempre il più lontano possibile dai cavi di alimentazione.
• GPS: Fornisce dati di posizione per le funzionalità di navigazione. Ho imparato a mie spese che non tutti i moduli GPS sono uguali - spendere un po' di più per un modulo con una migliore ricezione satellitare mi ha salvato dal perdere i droni nei voli a lungo raggio. Vedi anche: Tecnologia GNSS per droni
Interfacce di Input/Output
Le connessioni per periferiche e altri componenti sono ciò che rende versatile un flight controller. Ho costruito di tutto, dai quad da gara minimalisti alle complesse macchine a lungo raggio, e le interfacce disponibili fanno tutta la differenza.
• Porte UART: Forniscono comunicazione seriale con ricevitori, GPS, telemetria, ecc. Ho scoperto che avere almeno 4-5 UART mi dà la flessibilità di cui ho bisogno per la maggior parte delle build. Esaurire le UART è frustrante e spesso richiede compromessi.
• Bus I2C: Abilita la comunicazione con alcune periferiche e sensori. Ho avuto esperienze contrastanti con I2C - è conveniente ma può essere soggetto a problemi di rumore se non implementato correttamente.
• Bus SPI: Offre comunicazione ad alta velocità con giroscopi e altri dispositivi. Questo è fondamentale per le prestazioni e ho notato che i flight controller con bus SPI ben implementati tendono ad avere segnali del giroscopio più puliti.
• Uscite motore: Si collegano agli ESC per il controllo del motore. La tendenza verso i protocolli DShot è stata un cambiamento epocale nella mia esperienza - la precisione digitale elimina molti dei mal di testa di calibrazione con cui avevo a che fare in passato. Vedi anche: Motori per droni FPV e ESC per droni FPV
• Porta USB: Utilizzata per la configurazione e gli aggiornamenti del firmware. Ho imparato a controllare la qualità di questa connessione - una porta USB traballante è spesso la prima cosa a rompersi su un flight controller.
Gestione dell'alimentazione
I circuiti di alimentazione forniscono energia pulita e regolata e ho imparato a non sottovalutarne l'importanza. All'inizio del mio percorso FPV, ho riscontrato misteriosi problemi di volo che alla fine sono stati ricondotti a problemi di alimentazione.
• Regolatori di tensione: Convertono la tensione della batteria in 5V e 3,3V per l'elettronica. Ho scoperto che regolatori di qualità fanno una differenza significativa nell'affidabilità complessiva del sistema, specialmente su build ad alta potenza.
• Condensatori di filtro: Levigano l'erogazione di potenza e riducono il rumore. Aggiungo sempre condensatori aggiuntivi alle mie build - è un'assicurazione economica contro il rumore elettrico che può influenzare le letture dei sensori.
• Circuiti di protezione: Prevengono danni da picchi di tensione o inversione di polarità. Ho fritto più di un flight controller collegando una batteria al contrario, quindi ora cerco schede con una protezione robusta.
Per informazioni più dettagliate sull'alimentazione del tuo drone, vedi:
Panoramica sui tipi di batterie per droni e sulla chimica
Hardware del Flight Controller
Nel corso degli anni, ho usato dozzine di diversi flight controller su varie build e ho sviluppato alcune forti opinioni su cosa funziona meglio per diverse applicazioni.
Classificazioni dei Flight Controller
Per tipo di processore
Il processore è il modo più comune per classificare i flight controller e ho scoperto che scegliere il processore giusto per le tue esigenze è cruciale.
I Flight Controller F4 (168-216MHz) offrono un buon equilibrio tra prestazioni e costo. Li uso nella maggior parte delle mie build perché sono sufficienti per tutte le applicazioni tranne quelle più esigenti. Il Betaflight F4, il Matek F405 e l'iFlight SucceX-E F4 mi hanno servito bene.
I Flight Controller F7 (216-400MHz) forniscono più UART e funzionalità. Li uso nelle build in cui ho bisogno di collegare più periferiche o voglio le migliori prestazioni di filtraggio possibili. Il Matek F722, lo SpeedyBee F7 e l'iFlight SucceX-E F7 sono tra i miei preferiti.
I Flight Controller H7 (400-480MHz) rappresentano l'avanguardia con la massima capacità di elaborazione. Sto testando lo SpeedyBee H7 e il Matek H743 e, sebbene i miglioramenti delle prestazioni rispetto all'F7 siano sottili, sono sicuramente a prova di futuro per le funzionalità avanzate.
Per fattore di forma
I flight controller sono disponibili in schemi di montaggio standardizzati e scegliere la dimensione giusta è fondamentale per la tua build.
Il montaggio standard (30,5×30,5mm) è la dimensione più comune per build da 5" e più grandi. Li uso nella maggior parte dei miei quad freestyle e a lungo raggio perché offrono il maggior numero di funzionalità e opzioni di connettività.
Il montaggio 20×20mm è comune nelle build da 3" e più piccole. Ho scoperto che queste schede più piccole hanno fatto molta strada in termini di funzionalità, anche se in genere avrai meno UART e opzioni di connessione.
Il montaggio 16×16mm è usato nelle micro build e nei tiny whoop. Questi sono incredibilmente compatti e sono sempre stupito di quanta funzionalità i produttori riescano a inserire in uno spazio così piccolo.
AIO (All-In-One) combina l'FC con altri componenti come gli ESC. Ho imparato ad apprezzarli per alcune build - semplificano il cablaggio e possono ridurre il peso, anche se rappresentano un singolo punto di guasto.
Per integrazione delle funzionalità
I moderni flight controller spesso integrano componenti aggiuntivi e ho scoperto che scegliere il giusto livello di integrazione può rendere la costruzione molto più semplice.
Solo FC sono schede che forniscono solo la funzionalità di flight controller. Li uso ancora nella maggior parte delle mie build dove voglio la massima flessibilità nella selezione dei componenti.
FC+PDB combinazioni includono la distribuzione dell'alimentazione. Risparmiano spazio e semplificano il cablaggio.
FC+ESC (4-in-1) stack combinano l'FC con gli ESC. Riducono drasticamente i tempi di costruzione e creano una configurazione più pulita e affidabile.
FC+ESC+VTX soluzioni all-in-one includono il video trasmettitore. Ho avuto esperienze contrastanti con questi - sono convenienti ma possono surriscaldarsi e se un componente si guasta, si sostituisce tutto.
FC+ESC+VTX+RX stack di volo completi includono il ricevitore. Offrono la massima integrazione e, mentre ero scettico all'inizio, alcune delle implementazioni più recenti funzionano sorprendentemente bene.
Caratteristiche hardware chiave da considerare
Quando si seleziona un flight controller, ho imparato a prestare attenzione a diverse caratteristiche hardware che possono fare la differenza nella tua esperienza di volo.
Numero e disponibilità di UART
Le UART sono porte seriali utilizzate per collegare le periferiche e ho scoperto che averne a sufficienza è fondamentale per la flessibilità.
Considero 3 UART il minimo assoluto (ricevitore, telemetria e una di riserva). Ho costruito quad con solo 3 UART, ma sembra sempre limitante.
4-5 UART forniscono una configurazione comoda per la maggior parte delle build. Questo mi dà abbastanza connessioni per un ricevitore, telemetria, GPS e forse controllo della fotocamera o controllo LED.
6+ UART offrono la massima flessibilità per configurazioni complesse. Le mie build a lungo raggio in genere usano così tante connessioni per varie periferiche e sistemi di backup.
Ho imparato a mie spese che non tutte le UART sono uguali - alcune possono essere condivise con altre funzioni o avere limitazioni. Controlla sempre attentamente la documentazione.
Tipo di giroscopio e implementazione
Il giroscopio è fondamentale per le prestazioni di volo e ho sviluppato forti preferenze basate su anni di test.
I giroscopi della serie MPU6000 sono affidabili con un livello di rumore inferiore. Li preferisco per le build da gara dove conta ogni bit di prestazioni. Stanno diventando più difficili da trovare sulle schede più recenti, ma sono ancora la mia prima scelta quando disponibili.
I giroscopi ICM20602/ICM20689 offrono buone prestazioni e sono comuni negli FC moderni. Li ho trovati perfettamente adeguati per la maggior parte degli stili di volo, anche se leggermente più suscettibili al rumore rispetto all'MPU6000.
Il BMI270 è un sensore più recente con prestazioni eccellenti. Sono rimasto impressionato dalla sua gestione del rumore nelle mie build recenti e sembra che stia diventando il nuovo standard.
Anche il metodo di montaggio è importante - i giroscopi soft-mounted e hard-mounted gestiscono le vibrazioni in modo diverso. Preferisco i flight controller con giroscopi ben isolati, in quanto sono meno influenzati dalle vibrazioni che sono inevitabili nei quad ad alte prestazioni.
Valutazione del sensore di corrente
Per le build con rilevamento della corrente integrato, scegliere la valutazione giusta è importante per una gestione accurata della batteria.
I droni da gara in genere richiedono una valutazione di 30-60A. Ho scoperto che andare troppo in alto riduce la risoluzione e la precisione per queste build più leggere.
I droni freestyle funzionano meglio con una valutazione di 50-100A. Le mie build freestyle possono assorbire una corrente significativa durante le manovre aggressive, quindi avere margine è importante.
Le configurazioni a lungo raggio e cinematiche in genere richiedono una valutazione di 40-80A. Queste build tendono ad avere un assorbimento di corrente più costante, quindi la precisione è più importante dell'intervallo estremo.
La risoluzione (profondità di bit) fornisce letture più precise. Ho scoperto che i sensori di corrente ad alta risoluzione fanno una notevole differenza nella precisione dei miei avvisi di batteria e telemetria.
Registrazione Blackbox
Per la registrazione e la messa a punto, la funzionalità blackbox è essenziale e ho usato vari approcci a seconda della build.
La flash integrata (di solito 8-16MB) è comoda ma limitata in capacità. La uso per sessioni di messa a punto rapide, ma si riempie rapidamente con frequenze di registrazione elevate.
Gli slot per schede SD forniscono una capacità di archiviazione molto più grande ma aggiungono complessità. Per lavori di messa a punto seri, preferisco i flight controller con supporto per schede SD - la possibilità di registrare interi voli ad alte frequenze è inestimabile.
Alcuni FC non hanno memoria e richiedono un logger esterno per i dati blackbox. Evito questi quando possibile, poiché il logger esterno aggiunge peso e complessità.
Funzionalità hardware aggiuntive
Nel corso degli anni, ho imparato ad apprezzare diverse altre funzionalità che migliorano l'esperienza di volo.
L'OSD (on-screen display) integrato per il feed FPV è qualcosa che ora considero essenziale. Poter vedere la tensione della batteria, il tempo di volo e altre informazioni critiche durante il volo ha salvato molti dei miei droni da incidenti o danni alla batteria.
Un barometro per il mantenimento dell'altitudine può essere utile in determinate situazioni. Non uso spesso questa funzione, ma quando si riprende un filmato cinematico, un affidabile mantenimento dell'altitudine è prezioso.
Le uscite di controllo LED per le strisce LED rendono più facili i voli notturni e l'identificazione del drone. Mi sono affezionato ad avere LED indirizzabili sulle mie build - non sono solo per spettacolo, sono genuinamente utili per l'orientamento e l'indicazione dello stato.
Le uscite del buzzer per localizzare i droni precipitati mi hanno risparmiato ore di ricerca. Ora non costruisco mai un quad senza un buzzer - è troppo facile perdere di vista un drone scuro nell'erba alta o sugli alberi.
Il controllo della fotocamera per regolare le impostazioni della fotocamera durante il volo è un lusso che ho imparato ad apprezzare. Poter regolare l'esposizione o altre impostazioni senza atterrare è particolarmente utile per le condizioni di luce variabili.
Firmware del flight controller
Il firmware è il software che gira sull'hardware del flight controller, determinandone le capacità e il comportamento. Ho provato la maggior parte delle opzioni disponibili e ognuna ha i suoi punti di forza e di debolezza.
Principali opzioni firmware
Sono disponibili diverse opzioni firmware e ho trascorso del tempo con ciascuna di esse per comprenderne le caratteristiche uniche.
Betaflight
Betaflight è il firmware più popolare per i droni FPV ed è quello che uso sulla maggior parte delle mie build. Si concentra sulle prestazioni di gara e freestyle, con eccellenti caratteristiche di volo e sviluppo attivo.
I punti di forza di Betaflight includono le sue eccezionali prestazioni di volo, la comunità di sviluppo attiva e la vasta base di utenti. Quando ho un problema con Betaflight, di solito riesco a trovare qualcuno che l'ha già risolto.
I suoi punti deboli includono funzionalità autonome limitate e una curva di apprendimento più ripida. Ho trascorso innumerevoli ore nel Configuratore Betaflight a modificare le impostazioni, il che può essere intimidatorio per i principianti.
Betaflight è ideale per le gare, il freestyle e il volo FPV in generale. Se sei principalmente interessato al volo acrobatico o alle gare, è difficile da battere.
INAV
INAV si concentra sulle funzionalità di navigazione e autonome, e lo uso sui miei setup a lungo raggio e di mappatura. Le sue modalità GPS, il ritorno a casa e le capacità di waypoint sono eccellenti.
I punti di forza di INAV sono le sue funzionalità di navigazione complete e il volo autonomo affidabile. Mi è capitato che INAV riportasse indietro droni da chilometri di distanza quando avevo perso il segnale video.
I suoi punti deboli includono l'essere meno ottimizzato per il volo di pura prestazione. Sebbene INAV abbia migliorato le sue prestazioni acro, non eguaglia ancora del tutto Betaflight per le gare o il freestyle.
INAV è ideale per il volo a lungo raggio, la mappatura e le missioni autonome. Se sei interessato all'esplorazione piuttosto che all'acrobazia, INAV vale la pena di essere considerato.
KISS
KISS adotta un approccio semplificato con un'enfasi sul codice pulito. Ho usato KISS su alcune build, e la sua semplicità è rinfrescante.
I punti di forza di KISS includono la facilità di configurazione e le buone caratteristiche di volo out of the box. Sono rimasto impressionato da quanto poco tuning fosse necessario per far volare bene un quad alimentato da KISS.
I suoi punti deboli includono l'essere closed source e avere opzioni hardware limitate. L'ecosistema è più piccolo, il che significa meno risorse quando sorgono problemi.
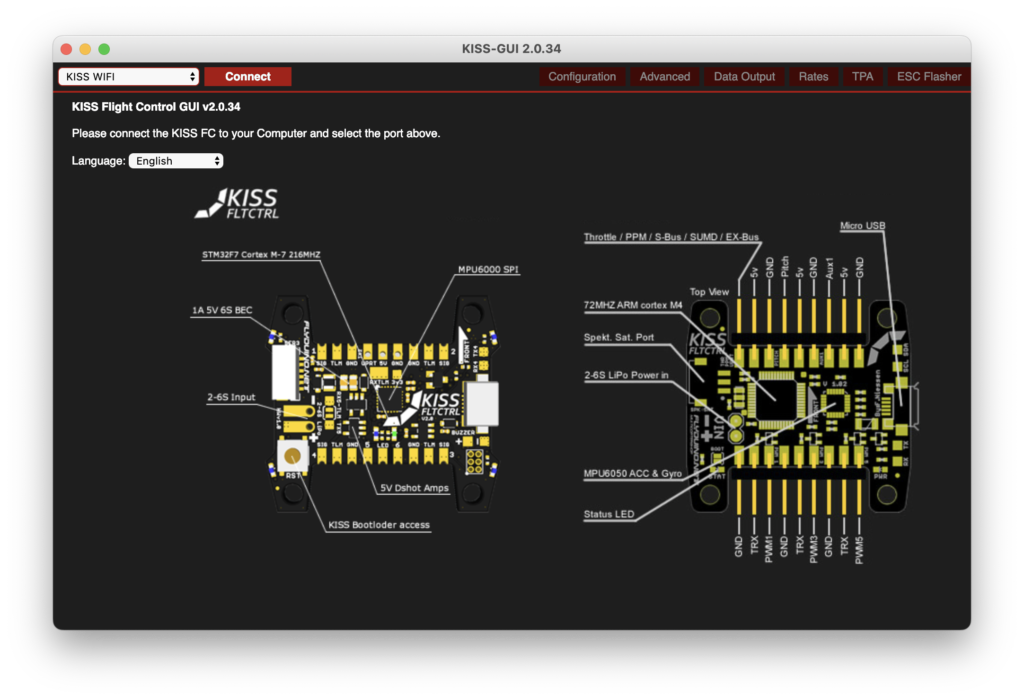
KISS è ideale per i piloti che cercano la semplicità con buone prestazioni. Se vuoi passare più tempo a volare e meno tempo a configurare, KISS vale la pena di dare un'occhiata.
Emuflight
Emuflight è un fork di Betaflight con approcci alternativi al controllo del volo. Ho sperimentato con esso su un paio di build, in particolare per il volo cinematico.
I punti di forza di Emuflight includono la sua sensazione di volo unica e le buone prestazioni per determinati stili di volo. L'ho trovato particolarmente buono per il freestyle fluido e scorrevole.
I suoi punti deboli includono una comunità più piccola e aggiornamenti meno frequenti. Quando sorgono problemi, ci sono meno risorse disponibili rispetto a Betaflight.
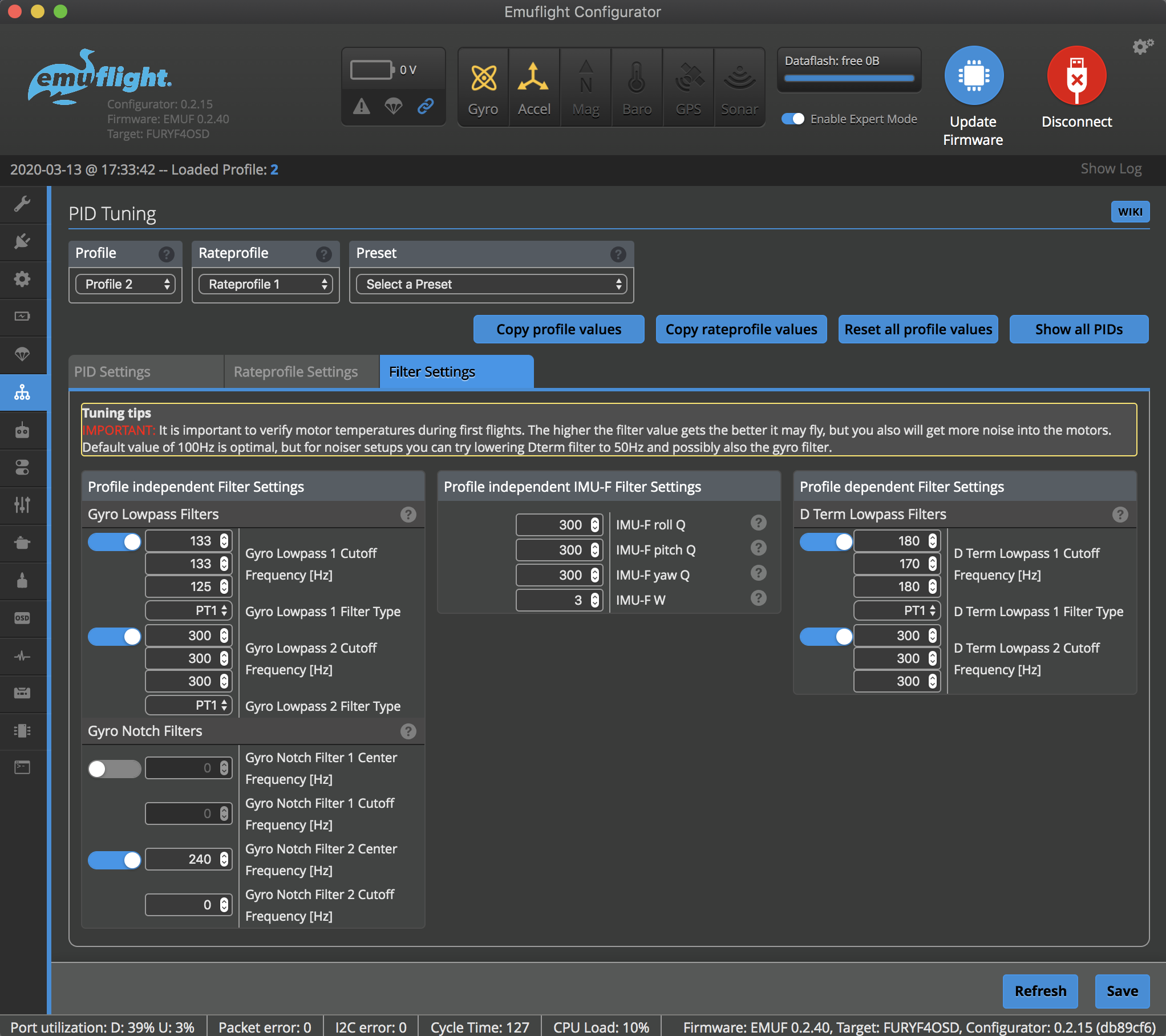
Emuflight è ideale per i piloti che cercano caratteristiche di volo specifiche, in particolare quelli che danno priorità alla fluidità rispetto alla reattività assoluta.
Ardupilot/PX4
Ardupilot e PX4 sono sistemi di autopilota open-source di livello professionale. Li ho usati per lavori di mappatura e rilevamento più seri.
I punti di forza di questi sistemi includono la pianificazione completa delle missioni e le funzionalità professionali. Il livello di capacità autonoma supera di gran lunga ciò che è disponibile in altre opzioni firmware.
I loro punti deboli includono la configurazione complessa e una minore ottimizzazione per l'agilità. Questi non sono sistemi che sceglierei per il freestyle o le gare.
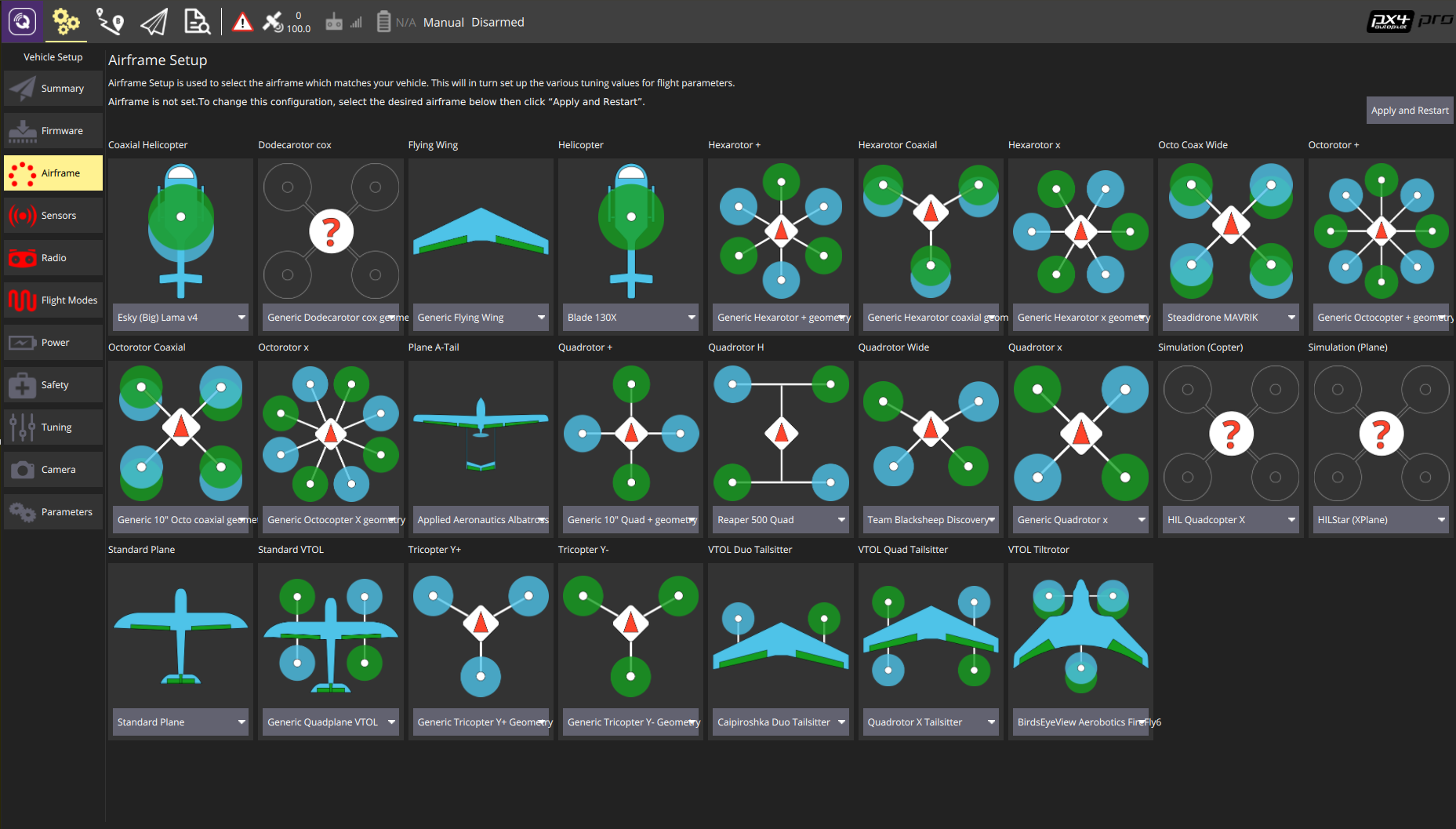
Ardupilot e PX4 sono ideali per la mappatura, il lavoro di rilevamento e le applicazioni professionali in cui l'affidabilità e le capacità autonome sono più importanti dell'agilità.
Confronto delle caratteristiche del firmware
Nella mia esperienza di utilizzo di queste diverse opzioni firmware, ho sviluppato un senso dei loro relativi punti di forza in diverse aree:
| Caratteristica | Betaflight | INAV | KISS | Emuflight | Ardupilot |
|---|---|---|---|---|---|
| Modalità Acro | ★★★★★ | ★★★★☆ | ★★★★★ | ★★★★★ | ★★★☆☆ |
| Modalità GPS | ★★☆☆☆ | ★★★★★ | ★★☆☆☆ | ★★☆☆☆ | ★★★★★ |
| Opzioni OSD | ★★★★☆ | ★★★★☆ | ★★★☆☆ | ★★★★☆ | ★★★☆☆ |
| Facilità di configurazione | ★★★☆☆ | ★★☆☆☆ | ★★★★★ | ★★★☆☆ | ★☆☆☆☆ |
| Supporto della comunità | ★★★★★ | ★★★★☆ | ★★★☆☆ | ★★★☆☆ | ★★★★☆ |
| Frequenza di aggiornamento | ★★★★★ | ★★★★☆ | ★★☆☆☆ | ★★★☆☆ | ★★★★☆ |
| Opzioni hardware | ★★★★★ | ★★★★☆ | ★★☆☆☆ | ★★★★☆ | ★★★☆☆ |
Scegliere il flight controller giusto
La scelta del flight controller appropriato dipende dalle tue esigenze specifiche e dai requisiti di costruzione. Dopo aver costruito decine di droni diversi, ho sviluppato alcune linee guida per diverse applicazioni.
Per i droni da corsa
Quando costruisco droni da corsa, do priorità a prestazioni, affidabilità e semplicità. Ogni grammo conta e le funzionalità non necessarie aggiungono solo peso.
Consiglio un processore F4 o F7 per alti loop rate. Mentre l'F7 ha più potenza di elaborazione, molti piloti di alto livello usano ancora schede F4 perché sono più leggere e perfettamente in grado di gestire le esigenze delle corse.
Per il giroscopio, preferisco la serie MPU6000 o ICM20602 per l'affidabilità. Un segnale giroscopico pulito è fondamentale per le corse, dove piccoli disturbi possono influenzare la manovrabilità ad alte velocità.
Il fattore di forma dovrebbe essere 20×20mm per build compatte o 30,5×30,5mm per build standard. Ho spostato la maggior parte delle mie build da corsa a 20×20mm per risparmiare peso e spazio.
Dal punto di vista dell'integrazione, uno stack FC+ESC crea build pulite con cablaggio minimo. Ciò riduce il peso e il potenziale di guasti del cablaggio, che sono comuni negli incidenti di gara.
Per il firmware, uso esclusivamente Betaflight ottimizzato per le corse. Le impostazioni predefinite sono migliorate molto, ma faccio ancora modifiche per il mio stile di volo specifico.
Alcuni esempi di flight controller che ho usato con successo per le corse includono iFlight SucceX-E F4/F7, T-Motor F7 e SpeedyBee F4/F7.
Per i droni freestyle
Per i droni freestyle, do priorità ad affidabilità, un set di funzionalità completo e prestazioni. Queste build subiscono più abusi di qualsiasi altra, quindi la durata è fondamentale.
Consiglio un processore F7 per un migliore filtraggio e funzionalità. La potenza di elaborazione extra aiuta con il filtraggio complesso, che è importante per i rapporti potenza-peso elevati comuni nelle build freestyle.
Il giroscopio dovrebbe essere ben isolato per un segnale pulito. Il freestyle comporta manovre ad alta potenza che creano molte vibrazioni, quindi un buon isolamento fa una differenza significativa.
Un sensore di corrente accurato è importante per la gestione della batteria. Il volo freestyle può comportare rapidi cambiamenti nella richiesta di potenza, quindi conoscere lo stato della batteria è fondamentale.
La capacità di blackbox tramite flash onboard o scheda SD è essenziale per la messa a punto. Ho scoperto che una corretta messa a punto fa un'enorme differenza nelle prestazioni freestyle e i dati della blackbox sono la chiave per una buona messa a punto.
Un OSD completo fornisce importanti informazioni durante il volo. Mi affido al mio OSD per dirmi quando è il momento di atterrare, cosa facile da dimenticare quando ti stai divertendo con i trick freestyle.
I flight controller con cui ho avuto buone esperienze per il freestyle includono Matek F722-SE, Holybro Kakute F7 e Diatone Mamba F722.
Per droni a lungo raggio/cinematici
Per applicazioni a lungo raggio e cinematiche, do priorità ad affidabilità, funzionalità GPS ed efficienza energetica. Queste build devono essere affidabili quando si vola lontano da casa.
Consiglio un processore F7 per gestire GPS e altre periferiche. Le UART aggiuntive e la potenza di elaborazione sono preziose per i molteplici sistemi tipicamente presenti nelle build a lungo raggio.
Un barometro è utile per il mantenimento dell'altitudine e le funzionalità correlate. Quando si vola lontano, avere informazioni affidabili sull'altitudine è importante per la navigazione e la gestione della batteria.
Sono necessarie più UART per GPS, telemetria, controllo della fotocamera, ecc. Le mie build a lungo raggio in genere utilizzano almeno 5-6 UART per vari sistemi.
Il supporto del firmware INAV è importante per le funzionalità di navigazione. Mentre Betaflight ha capacità GPS di base, INAV è di gran lunga superiore per le attività di navigazione serie.
Un filtraggio pulito dell'alimentazione è essenziale per tempi di volo prolungati. Il volo a lungo raggio riguarda l'efficienza e un'alimentazione pulita aiuta a massimizzare il tempo di volo.
I flight controller che mi hanno servito bene per queste applicazioni includono Matek F765-WING, Holybro Kakute H7 e iFlight Beast H7.
Per build micro
Quando costruisco droni micro, do priorità a dimensioni, peso e integrazione. Ogni componente deve essere il più piccolo e leggero possibile.
Il fattore di forma dovrebbe essere 16×16mm o 20×20mm per adattarsi a frame compatti. Sono rimasto stupito di quanto siano diventati capaci questi minuscoli flight controller.
I design AIO con ESC integrati semplificano la build e risparmiano spazio. Nelle build più piccole, i componenti separati semplicemente non sono pratici.
I componenti ultraleggeri sono essenziali per buone prestazioni di volo. Un flight controller pesante in una build micro influirà notevolmente sulla manovrabilità.
Un design semplificato con solo le funzionalità essenziali aiuta a ridurre al minimo il peso. Funzionalità come barometri e UART extra vengono spesso omesse per risparmiare peso.
I flight controller che ho usato con successo nelle build micro includono HGLRC Zeus F4/F7 AIO, BetaFPV F4 AIO e NamelessRC F4/F7 AIO.
Per principianti
Per i principianti, consiglio di dare priorità a facilità d'uso, durata e valore. Le tue prime build probabilmente si schianteranno più spesso, quindi la resilienza è importante.
Un processore F4 è sufficiente per l'apprendimento. Mentre l'F7 offre più funzionalità, una scheda F4 fornirà tutto ciò di cui un principiante ha bisogno a un costo inferiore.
Funzionalità di protezione come rivestimento conforme e design robusto aiutano a sopravvivere agli incidenti. Consiglio sempre ai principianti di applicare un ulteriore rivestimento conforme ai loro flight controller: è un'assicurazione economica contro cortocircuiti accidentali.
Una buona documentazione e risorse di supporto rendono la curva di apprendimento più facile. Alcuni produttori forniscono una documentazione molto migliore di altri, il che fa una grande differenza quando si sta imparando.
Il firmware Betaflight con buone impostazioni predefinite consente il successo senza una messa a punto estesa. Le impostazioni predefinite sono migliorate drasticamente negli ultimi anni, rendendo molto più facile per i principianti ottenere buone prestazioni di volo.
Le opzioni economiche offrono un buon rapporto qualità-prezzo senza funzionalità eccessive. Non c'è bisogno di spendere extra per funzionalità che non userai mentre impari.
I flight controller che spesso consiglio ai principianti includono iFlight SucceX-E F4, Matek F405-STD e JHEMCU GHF411.
Installazione e configurazione del flight controller
Una corretta installazione e configurazione sono fondamentali per prestazioni ottimali. Ho commesso ogni possibile errore in quest'area, quindi ho imparato cosa funziona e cosa no.
Installazione hardware
Considerazioni sul montaggio
L'orientamento del tuo flight controller è fondamentale: la freccia dovrebbe puntare in avanti, oppure puoi configurare un orientamento diverso nel software. Ho imparato a controllare due volte questo prima di ogni volo inaugurale, poiché è un errore facile da commettere.
L'isolamento dalle vibrazioni attraverso un montaggio morbido con gommini o nastro in schiuma fa una differenza significativa nelle prestazioni di volo. Ora uso il montaggio morbido su tutte le mie build - il miglioramento nei dati del giroscopio è notevole.
Per informazioni più dettagliate sull'isolamento dalle vibrazioni, vedere:
Smorzamento delle vibrazioni del drone
La posizione dovrebbe essere al centro di gravità e protetta dagli urti. Cerco di posizionare il flight controller al centro del telaio, sia per l'equilibrio che per fornire la massima protezione.
L'accesso alla porta USB è importante per la configurazione e gli aggiornamenti. Ho costruito quad in cui ho dovuto smontarli parzialmente per collegare l'USB - un errore che non ripeterò.
Un adeguato flusso d'aria per il raffreddamento dell'elettronica previene problemi di surriscaldamento. I flight controller possono diventare piuttosto caldi, soprattutto quando sono impacchettati vicino a ESC e video trasmettitori.
Migliori pratiche di cablaggio
L'instradamento pulito dei fili lontano da componenti sensibili riduce le interferenze. Ho scoperto che tenere i fili di segnale lontani dai fili di alimentazione fa una notevole differenza nelle prestazioni.
Connessioni sicure attraverso una corretta saldatura o connettori di qualità prevengono guasti. Ho avuto troppi incidenti causati da connessioni scadenti per prendere ancora scorciatoie qui.
Lo scarico della trazione previene la tensione su giunti saldati e connettori. Una piccola fascetta o una goccia di colla a caldo può salvarti da frustranti problemi intermittenti.
La separazione dei fili di segnale dai fili di alimentazione riduce il rumore. Cerco sempre di instradare i fili di segnale sul lato opposto dello stack rispetto ai fili di alimentazione.
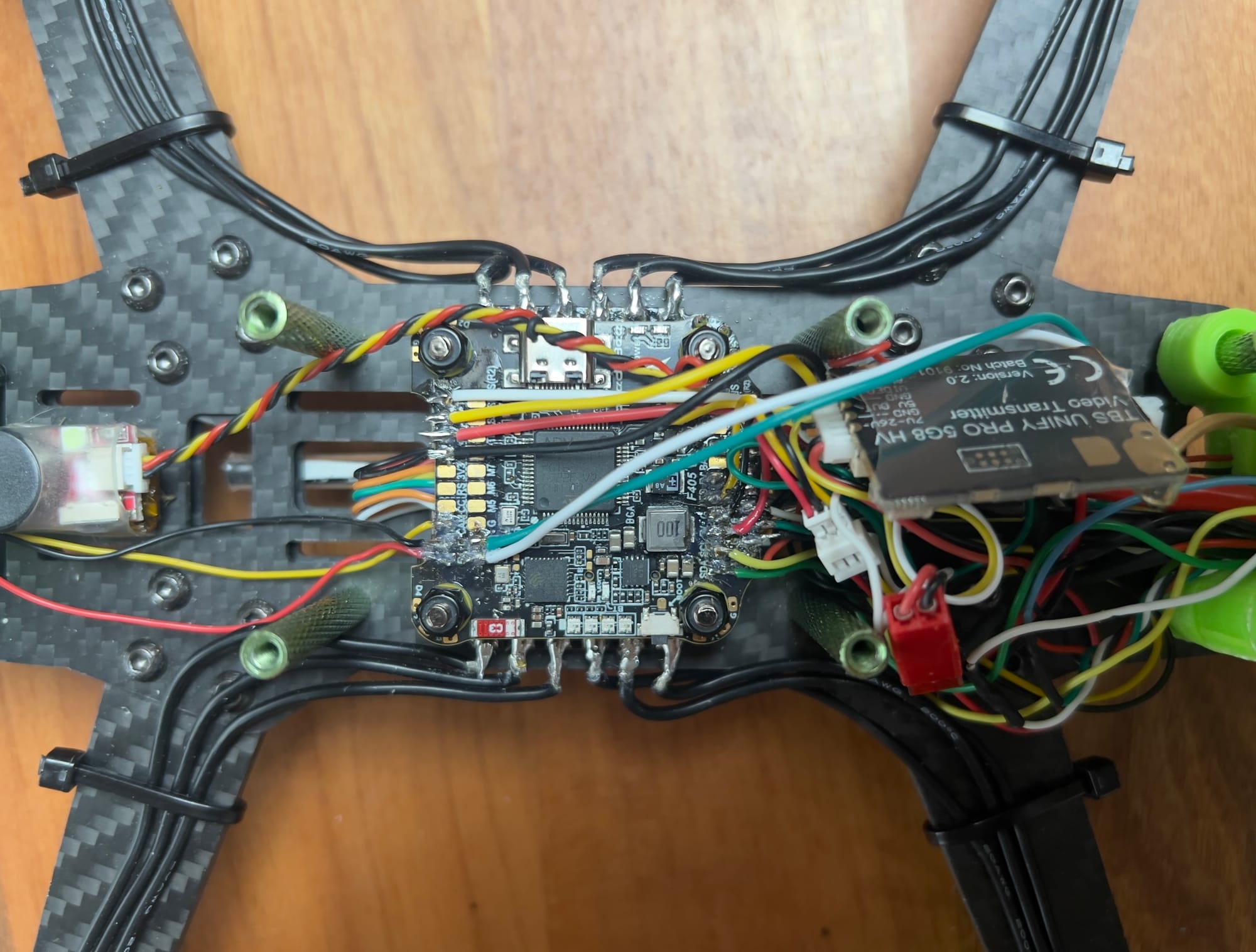
Ridurre al minimo la lunghezza dei fili riduce il rumore e il peso. Taglio tutti i fili alla lunghezza esatta necessaria - nessun cappio o gioco extra.
Per informazioni più dettagliate sul cablaggio, vedere:
Guida al cablaggio del drone
Configurazione del software
Processo di configurazione iniziale
Il processo di configurazione segue una sequenza logica che ho perfezionato in molte build:
- Installare il software Configurator: Tengo versioni separate per diversi rami del firmware per evitare problemi di compatibilità.
- Collegare l'FC: Utilizzare un cavo USB di qualità che supporti il trasferimento dati. Ho individuato molti misteriosi problemi di connessione in cavi USB economici o danneggiati.
- Flashare il firmware: Aggiornare all'ultima versione stabile. Di solito evito le versioni bleeding-edge per le build su cui faccio affidamento - la stabilità è più importante delle funzionalità più recenti.
- Configurazione di base:
• Impostare il corretto orientamento della scheda
• Configurare le UART per le periferiche
• Impostare il protocollo del ricevitore
• Configurare il monitoraggio della batteria - Configurazione del ricevitore:
• Associare il ricevitore al trasmettitore
• Verificare la mappatura dei canali
• Impostare il comportamento del failsafe (lo testo sempre prima del primo volo - mi ha salvato da flyaway più di una volta) - Configurazione dei motori:
• Verificare la direzione del motore (sempre con le eliche staccate!)
• Impostare il protocollo ESC (DShot600 è la mia raccomandazione per la maggior parte delle build)
• Controllare rumori o vibrazioni insolite - Configurazione della modalità di volo:
• Configurare l'interruttore di armamento
• Impostare modalità di volo aggiuntive
• Uso un layout coerente degli interruttori su tutti i miei modelli per evitare confusione - Configurazione OSD:
• Personalizzare gli elementi del display on-screen
• Posizionare gli elementi per la visibilità
• Impostare avvisi e allarmi - Tuning dei PID:
• Iniziare con i valori predefiniti o i preset
• Messa a punto secondo necessità dopo i voli iniziali
Problemi di configurazione comuni e soluzioni
Nel corso degli anni, ho incontrato e risolto innumerevoli problemi di configurazione. Ecco alcuni dei problemi più comuni e le loro soluzioni:
Nessuna connessione al Configurator
Quando il tuo flight controller non si connette al configuratore, può essere incredibilmente frustrante. Ho trovato diverse potenziali cause:
• Driver errati/mancanti: Spesso il colpevole. Ho imparato a tenere una raccolta di driver per diversi flight controller, poiché Windows in particolare può essere difficile.
• Porte/cavi USB danneggiati: Causano misteriosi problemi di connessione. Ora uso cavi USB di alta qualità e ho un cavo dedicato "sicuramente funzionante" per la risoluzione dei problemi.
• Problemi di modalità bootloader: A volte il flight controller rimane bloccato in modalità bootloader. Ho sviluppato una routine di cortocircuito dei pin di boot e di ciclo di alimentazione per forzarlo nella modalità corretta.
• Porta COM errata: Un semplice errore che è facile da fare. Controllo sempre il gestore dei dispositivi per confermare quale porta sta usando il flight controller.
Motori che girano nella direzione sbagliata
Avere i motori che girano nel verso sbagliato è un problema comune con soluzioni semplici:
• Scambiare i fili del motore: È possibile scambiare due fili qualsiasi del motore per invertire la direzione. L'ho fatto innumerevoli volte, anche se richiede una nuova saldatura.
• Configurazione BLHeli: Usare il configuratore BLHeli per invertire la direzione del motore è più facile se si usano ESC BLHeli. Questo è il mio metodo preferito in quanto non richiede modifiche hardware.
• Verifica pre-volo: Verificare sempre l'ordine e la direzione dei motori nel configuratore prima del primo volo. Ho fatto schiantare più di un quad saltando questo passaggio.
Comportamento di volo instabile
Quando il tuo quad non vola bene, ci sono diverse potenziali cause:
• Orientamento FC errato: Un colpevole comune. Una volta ho passato ore a risolvere un comportamento irregolare solo per rendermi conto che avevo il flight controller ruotato di 90 gradi rispetto a quanto configurato nel software.
• Problemi di vibrazione: Possono causare tutti i tipi di strani comportamenti. Sono diventato un forte sostenitore di un corretto isolamento dalle vibrazioni dopo aver visto l'enorme differenza che fa nelle prestazioni di volo.
• Problemi di tuning dei PID: Spesso si manifestano come oscillazioni o risposta lenta. In caso di dubbio, ripristino i PID predefiniti e ricomincio da capo.
• Rumore del giroscopio: Può causare un comportamento nervoso e imprevedibile. Ho scoperto che le impostazioni di filtraggio appropriate e un buon isolamento hardware fanno una differenza significativa.
Ricevitore non rilevato
Quando il tuo ricevitore non comunica con il tuo flight controller, controlla questi problemi comuni:
• Assegnazione UART errata: Il problema più frequente. Controllo sempre a quale UART è collegato il ricevitore e mi assicuro che sia configurato correttamente nella scheda Porte.
• Protocollo ricevitore errato: Un altro errore comune. Il protocollo nella scheda Configurazione deve corrispondere al tipo di ricevitore.
• Problemi di binding: Possono causare problemi di comunicazione. Ho imparato a seguire attentamente la procedura di binding per ogni tipo di ricevitore.
• Problemi di cablaggio: Specialmente con le connessioni di segnale e di terra, possono impedire la comunicazione. Controllo sempre la continuità con un multimetro se sospetto problemi di cablaggio.
Argomenti avanzati sul flight controller
Per i piloti esperti che vogliono ottimizzare le loro configurazioni, questi concetti avanzati forniscono approfondimenti più dettagliati. Ho trascorso anni ad esplorare queste aree per ottenere il massimo dalle mie build.
Tuning e filtraggio PID
Il cuore delle prestazioni del flight controller risiede nel tuning e nel filtraggio PID. Questo è dove l'arte incontra la scienza nel mondo FPV.
Nozioni di base sui PID
Comprendere il controller PID è fondamentale per un buon tuning:
P (Proporzionale) fornisce una correzione immediata all'errore. Penso a questo come la "forza" della correzione. Troppo alto e si ottengono oscillazioni; troppo basso e il quad sembra pigro.
I (Integrale) accumula l'errore nel tempo. Questo aiuta a superare forze persistenti come il vento o una build sbilanciata. Ho scoperto che il termine I è spesso usato in modo eccessivo dai principianti - un po' va molto lontano.
D (Derivata) risponde alla velocità di variazione dell'errore. Questo attenua le correzioni del termine P e previene l'overshoot. Ottenere il termine D corretto è cruciale per un volo fluido - troppo basso e si ottengono angoli rimbalzanti, troppo alto e si ottengono motori caldi.
Filtraggio avanzato
Un filtraggio adeguato fa una grande differenza nelle prestazioni di volo:
Il filtraggio del giroscopio rimuove il rumore prima che raggiunga il controller PID. Ho imparato che dati del giroscopio più puliti portano a migliori prestazioni di volo e motori più freddi.
Il filtraggio D-Term è specifico per il termine derivativo, che è particolarmente sensibile al rumore. Presto particolare attenzione a questo, poiché un rumore eccessivo del termine D porta rapidamente a motori caldi.
Il filtraggio notch dinamico mira automaticamente alle frequenze di rumore del motore. Questo è stato un cambiamento epocale per me - si adatta a diversi livelli di accelerazione e riduce drasticamente il rumore senza aggiungere latenza.
Il filtraggio RPM utilizza la telemetria ESC per un targeting preciso del rumore. Quando ho abilitato questo per la prima volta su una build problematica, la differenza è stata come il giorno e la notte - improvvisamente il quad era liscio come il burro senza motori caldi.
I filtri statici mirano a fonti di rumore note a frequenze fisse. Li uso con parsimonia, poiché aggiungono latenza, ma sono preziosi per affrontare problemi di rumore specifici.
Approccio al tuning dei filtri
Il mio approccio al tuning dei filtri si è evoluto nel tempo:
Inizio con i valori predefiniti o i preset, che sono migliorati molto nelle versioni recenti di Betaflight. Spesso, questi sono sufficienti per il volo occasionale.
Per prestazioni serie, analizzo i log di blackbox per identificare le caratteristiche del rumore. Questo rivela frequenze specifiche che necessitano di targeting.
Regolo i filtri per mirare a rumori specifici mantenendo la reattività. Questo è un atto di equilibrio - troppo filtraggio aggiunge latenza, troppo poco lascia rumore.
Testare in modo incrementale con piccoli cambiamenti è cruciale. Faccio un cambiamento alla volta e testo a fondo prima di procedere.
La chiave è bilanciare il filtraggio con la latenza e la reattività. Un filtraggio perfetto con troppa latenza si sente peggio di un po' di rumore con una risposta nitida.
Registrazione e analisi Blackbox
La registrazione dei dati di volo ha trasformato il modo in cui mi approccio al tuning e alla risoluzione dei problemi:
Configurazione di Blackbox
Le opzioni di archiviazione includono flash a bordo vs. scheda SD. Preferisco le schede SD per il lavoro di tuning serio, poiché forniscono molta più capacità.
Le frequenze di registrazione bilanciano i dettagli con la durata. Per il tuning iniziale, uso frequenze elevate per catturare problemi sottili; per voli più lunghi, riduco la frequenza.
Selezionare i parametri rilevanti da registrare aiuta a gestire la dimensione del file. Mi concentro sui dati del giroscopio, i valori PID e gli output del motore per la maggior parte del lavoro di tuning.
Analisi dei log
INAV e Betaflight hanno i propri strumenti per l'esplorazione dei log di blackbox. Ho trascorso innumerevoli ore a fissare questi grafici, imparando a interpretare i pattern.

PIDtoolbox è un altro potente strumento per l'analisi approfondita dei log del tuo flight controller.
Le metriche chiave che cerco includono la traccia del giroscopio (per il rumore), la risposta PID (per il tuning) e gli output del motore (per il margine). Le relazioni tra questi raccontano la vera storia di come sta performando il tuo quad.
Identificare i problemi diventa più facile con l'esperienza. Ho imparato a riconoscere le firme di vari problemi - il rumore sembra diverso dai problemi PID, che sembrano diversi dai problemi meccanici.
Utilizzo dei log per il tuning
L'analisi del rumore aiuta a identificare le frequenze che richiedono il filtraggio. Cerco picchi nel grafico FFT che corrispondono alle frequenze del motore o alle loro armoniche.
La risposta al gradino mostra quanto velocemente il velivolo risponde agli input. Voglio vedere una risposta rapida senza eccessivo overshoot.
La valutazione del termine P rivela oscillazioni o lentezza. Una buona risposta del termine P mostra una rapida correzione senza continuare a rimbalzare avanti e indietro.
Il rumore del termine D è una causa comune di motori caldi. Cerco un rumore amplificato nel termine D che corrisponde ai picchi di uscita del motore.
Il margine di potenza del motore assicura che i motori non raggiungano il massimo. Voglio vedere almeno il 20% di margine sulle uscite del motore durante manovre aggressive.
CLI di Betaflight e configurazione avanzata
L'interfaccia a riga di comando fornisce potenti opzioni di configurazione che non sono disponibili nell'interfaccia grafica:
Comandi CLI essenziali
diff all mostra tutte le impostazioni che differiscono dai valori predefiniti. Questo è il mio comando preferito per controllare la mia configurazione e condividere le impostazioni con gli altri.
dump visualizza tutte le impostazioni correnti, inclusi i valori predefiniti. Questo è utile per comprendere la configurazione completa.
get [parameter] mostra i valori dei parametri specifici. Lo uso per controllare le singole impostazioni senza dover scorrere l'intera configurazione.
set [parameter]=[value] modifica i valori dei parametri. Questo consente un controllo preciso su ogni aspetto del flight controller.
save salva la configurazione corrente nella memoria. Ho imparato a mie spese a usarlo dopo aver apportato modifiche - dimenticarlo significa perdere tutto il lavoro.
resource mostra l'allocazione delle risorse per pin e periferiche. Questo è essenziale per la configurazione avanzata e la risoluzione dei problemi.
resource [resource_type] [index] [pin] riassegna le risorse a pin diversi. L'ho usato per liberare pin per funzioni specifiche o per aggirare problemi hardware.
status visualizza le informazioni sullo stato del sistema. Questo è utile per verificare quali funzionalità sono attive e come è configurato il sistema.
Rimappatura delle risorse
La riassegnazione dei pin per diverse funzioni è una capacità potente:
Le uscite dei motori possono essere spostate su pin diversi. L'ho usato per aggirare pad danneggiati sui flight controller.
La riassegnazione UART consente di spostare le porte seriali su pin diversi. Questo mi ha salvato quando i pin UART predefiniti erano danneggiati o necessari per un'altra funzione.
Il controllo LED può essere configurato per pin diversi. L'ho usato per aggiungere strisce LED a build in cui il pin LED predefinito non era disponibile.
Funzioni speciali come il controllo della fotocamera e le uscite del buzzer possono essere riassegnate. Questa flessibilità mi ha permesso di aggiungere funzionalità a build che altrimenti non le supporterebbero.
Configurazioni mixer personalizzate
Per layout di motori non standard, i mixer personalizzati sono essenziali:
I mix di motori personalizzati regolano l'influenza del motore su ogni asse. L'ho usato per build insolite come telai asimmetrici o supporti per fotocamera pesanti.
Configurazioni specializzate come tricotteri e code a V richiedono un mix personalizzato. Il mixer predefinito funziona per i quad standard, ma qualsiasi cosa insolita richiede personalizzazione.
La linearizzazione della spinta migliora la risposta dell'acceleratore compensando le caratteristiche non lineari del motore. Questo rende l'acceleratore più coerente in tutto l'intervallo.
Compilazione e personalizzazione del firmware
La creazione di firmware personalizzati consente ottimizzazioni specifiche:
Perché compilare firmware personalizzati
L'abilitazione di funzionalità sperimentali fornisce l'accesso a capacità all'avanguardia. Ho compilato firmware personalizzati per testare nuove funzionalità prima che fossero ufficialmente rilasciate.
L'ottimizzazione per hardware specifico può migliorare le prestazioni. La rimozione di componenti non necessari libera potenza di elaborazione per ciò che conta.
La personalizzazione dei valori predefiniti imposta il tuo punto di partenza preferito. Mantengo una build personalizzata con le mie impostazioni preferite incorporate.
La correzione di bug a volte richiede l'implementazione di patch prima dei rilasci ufficiali. Ho compilato firmware personalizzati per risolvere problemi specifici che hanno influenzato le mie build.
Processo di compilazione
La configurazione dell'ambiente di sviluppo richiede Git, una toolchain e altre dipendenze. Mantengo una VM di sviluppo dedicata per questo scopo.
Clonare il repository ti fornisce il codice sorgente con cui lavorare. Controllo sempre il ramo o il tag specifico da cui voglio compilare.
La configurazione della build comporta la selezione del target e delle funzionalità. Qui puoi personalizzare ciò che è incluso nel tuo firmware.
La compilazione costruisce il firmware dal codice sorgente. I computer moderni rendono questo processo abbastanza veloce.
Il flashing carica il firmware compilato sul tuo flight controller. Faccio sempre un backup del firmware originale prima di flashare build personalizzate.
Personalizzazioni comuni
Le modifiche al target consentono regolazioni specifiche per l'hardware. Ho modificato i target per adattarli meglio all'hardware specifico che sto utilizzando.
I toggle delle funzionalità abilitano o disabilitano capacità specifiche. La rimozione delle funzionalità che non usi libera risorse per ciò che conta.
Le modifiche predefinite modificano la configurazione iniziale. Imposto i miei valori predefiniti preferiti per PID, rate e altre impostazioni.
Le ottimizzazioni delle prestazioni si adattano a casi d'uso specifici. Le build da gara beneficiano di ottimizzazioni diverse rispetto alle build a lungo raggio.
Risoluzione dei problemi del flight controller
Anche i migliori flight controller possono sviluppare problemi. Ecco come diagnostico e affronto i problemi comuni:
Risoluzione dei problemi hardware
Problemi di alimentazione
Quando il tuo FC non si accende o subisce riavvii casuali, controlla queste cause comuni:
L'uscita del regolatore di tensione dovrebbe essere pulita e stabile. Uso un multimetro per verificare la tensione corretta sui punti di test.
La connessione e la tensione della batteria devono rientrare nell'intervallo operativo dell'FC. Ho danneggiato i flight controller collegando batterie con una tensione superiore a quella per cui erano classificati.
L'aggiunta o la sostituzione di condensatori di filtro può risolvere molti problemi relativi all'alimentazione. Aggiungo un condensatore a bassa ESR a quasi tutte le build come un'assicurazione economica contro i problemi di alimentazione.
I cortocircuiti possono causare misteriosi problemi di alimentazione. Uso un multimetro in modalità di continuità per verificare la presenza di cortocircuiti tra alimentazione e massa.
Un'adeguata capacità di alimentazione è essenziale, soprattutto per le build con molte periferiche. Ho visto problemi in cui l'FC si accendeva bene da solo ma falliva quando tutti i componenti erano collegati.
Problemi del sensore
Quando i sensori forniscono letture errate o una scarsa stabilizzazione:
La ricalibrazione dei sensori spesso risolve problemi minori. Mi assicuro che il quad sia perfettamente in piano durante la calibrazione dell'accelerometro.
I danni fisici possono influire sulle prestazioni del sensore. Ho dovuto sostituire i flight controller dopo che forti urti hanno danneggiato il giroscopio.
Migliorare l'isolamento dalle vibrazioni fa una grande differenza nelle prestazioni del sensore. Ora uso un montaggio morbido su tutte le mie build.
Gli aggiornamenti del firmware a volte risolvono i problemi del sensore. Ho visto bug in versioni specifiche del firmware che influivano sulle letture del sensore.
Se i sensori sono danneggiati in modo irreparabile, l'unica opzione è sostituire il flight controller. Tengo flight controller di riserva per le mie build principali per questo motivo.
Errori di connessione
Quando le periferiche non vengono rilevate o la comunicazione è intermittente:
Controllare il cablaggio e le connessioni è il primo passo. Uso una lente d'ingrandimento per ispezionare piccole saldature e connessioni.
La verifica delle configurazioni UART assicura che i protocolli giusti siano abilitati sulle porte giuste. Ho passato ore a risolvere problemi solo per scoprire che avevo abilitato la funzione sbagliata su un UART.
Testare con diversi cavi può identificare problemi di connessione. Tengo cavi USB sicuramente funzionanti appositamente per la risoluzione dei problemi.
Pin o giunzioni saldate danneggiate spesso causano problemi intermittenti. Ho risolto molti problemi rifondendo giunzioni saldate che sembravano a posto a occhio nudo.
I livelli di segnale e i protocolli devono corrispondere tra i dispositivi. Ho avuto problemi in cui dispositivi a 3,3V e 5V non comunicavano correttamente a causa di una mancata corrispondenza di tensione.
Risoluzione dei problemi software
Problemi di firmware
Quando il firmware si blocca, si congela o si comporta in modo imprevisto:
L'aggiornamento all'ultimo firmware stabile spesso risolve problemi noti. In genere evito le versioni bleeding-edge per le build su cui faccio affidamento.
Provare diverse versioni del firmware può aggirare bug specifici. Ho dovuto effettuare il downgrade del firmware per evitare problemi che influivano sulla mia configurazione particolare.
Il ripristino delle impostazioni predefinite e la riconfigurazione da zero a volte risolvono problemi misteriosi. Spesso è più veloce che cercare di individuare un'impostazione problematica specifica.
La riprogrammazione con cancellazione completa del chip cancella eventuali impostazioni o memoria corrotte. Uso questo come ultima risorsa quando altri tentativi di risoluzione dei problemi falliscono.
Problemi di compatibilità hardware possono causare comportamenti imprevisti. Controllo l'elenco dei target supportati prima di aggiornare il firmware.
Problemi di configurazione
Quando il tuo quad non risponde correttamente agli input o le funzioni non si attivano:
Verificare tutte le impostazioni di configurazione è noioso ma efficace. Passo attraverso ogni scheda nel configuratore in modo metodico.
Ripristinare le impostazioni predefinite e riconfigurare spesso risolve problemi con impostazioni in conflitto. A volte è più veloce che cercare di trovare il problema specifico.
Controllare le assegnazioni degli interruttori delle modalità assicura che si attivino come previsto. Uso la scheda del ricevitore per verificare che le posizioni degli interruttori vengano riconosciute correttamente.
Verificare la mappatura dei canali del ricevitore è fondamentale per un controllo adeguato. Ho avuto problemi in cui i canali erano mappati in modo errato, causando uno strano comportamento.
Esportare e rivedere la configurazione può aiutare a identificare i problemi. Confronto le configurazioni tra build funzionanti e non funzionanti per individuare le differenze.
Problemi di messa a punto delle prestazioni
Quando il tuo quad oscilla, risponde lentamente o i motori si surriscaldano:
Ripristinare i PID ai valori predefiniti fornisce un punto di partenza noto. Lo faccio ogni volta che apporto modifiche significative a una build.
Verificare le impostazioni del filtro assicura che siano appropriate per la tua build. Troppo filtraggio causa latenza; troppo poco lascia rumore.
Controllare problemi meccanici come componenti allentati o eliche danneggiate è essenziale. Ho inseguito problemi di messa a punto che in realtà erano causati da un telaio incrinato.
Analizzare i log della blackbox fornisce informazioni su problemi specifici. Questo è lo strumento di risoluzione dei problemi più potente per i problemi di prestazioni.
Applicare i preset appropriati per il tuo tipo di build spesso risolve problemi comuni. I preset nelle versioni recenti di Betaflight sono piuttosto buoni.
Quando sostituire un flight controller
A volte, la sostituzione è l'unica opzione. Sostituisco i flight controller quando:
Danni fisici influiscono sulle prestazioni, specialmente a componenti critici come il giroscopio o il processore. Ho provato a recuperare schede danneggiate, ma raramente ne vale la pena.
I sensori si sono guastati o sono diventati inaffidabili. Un flight controller con un giroscopio inaffidabile è pericoloso da far volare.
Problemi di processore o memoria causano instabilità. Se il tuo flight controller si riavvia o si blocca in modo casuale, è ora di sostituirlo.
L'aggiornamento per accedere a nuove funzionalità a volte richiede nuovo hardware. Ho sostituito flight controller perfettamente funzionanti per ottenere l'accesso a funzionalità che richiedevano hardware più recente.
Dopo significativi danni da acqua o elettricità, la sostituzione è spesso più sicura della riparazione. Ho imparato questa lezione dopo aver provato a recuperare un flight controller che si era bagnato - ha funzionato per un po', poi si è guastato in modo catastrofico a metà volo.
Tendenze future nei flight controller
Il panorama dei flight controller continua a evolversi rapidamente. Ecco dove vedo le cose che si stanno dirigendo:
Progressi hardware
I processori H7 e più potenti stanno diventando il nuovo standard. Ho testato flight controller H7 e, sebbene le differenze siano sottili ora, forniscono spazio per funzionalità future.
Sensori migliorati con livelli di rumore più bassi miglioreranno le prestazioni di volo. Ogni generazione di giroscopi migliora nel rifiutare il rumore mantenendo la sensibilità.
L'integrazione sta aumentando, con più soluzioni all-in-one. La tendenza verso stack di volo altamente integrati continuerà, rendendo le build più pulite e semplici.
La riduzione delle dimensioni continua, con componenti sempre più piccoli e leggeri. Sono stupito di quanta funzionalità si adatti ai moderni flight controller da 16×16mm.
I miglioramenti dell'efficienza energetica forniscono prestazioni migliori per watt. Questo è particolarmente importante per le build a lungo raggio e di resistenza.
Innovazioni software
L'apprendimento automatico per la messa a punto adattiva e il filtraggio è all'orizzonte. Ho visto primi esperimenti con messa a punto basata su ML che mostrano promesse per ottimizzare automaticamente le prestazioni.
Le funzionalità di autonomia avanzate stanno migliorando, con migliori capacità GPS e di navigazione. Il divario tra le capacità dei droni amatoriali e professionali si sta restringendo.
La configurazione semplificata con una configurazione più intuitiva sta rendendo l'hobby più accessibile. La curva di apprendimento sta diventando meno ripida con ogni generazione di firmware.
Stanno emergendo opzioni di firmware specializzate su misura per stili di volo specifici. Stiamo vedendo una maggiore divergenza tra firmware da corsa, freestyle e a lungo raggio.
Impostazioni predefinite migliorate significano una migliore esperienza out-of-box. I moderni flight controller volano notevolmente bene con le impostazioni predefinite.
Tecnologie emergenti
La visione artificiale per la navigazione basata su telecamera e l'elusione degli ostacoli sta diventando più accessibile. Ho sperimentato sistemi di visione di base e stanno diventando più pratici per l'uso amatoriale.
Il networking mesh consente la comunicazione da drone a drone. Questo apre possibilità per il volo coordinato e una maggiore sicurezza.
La telemetria avanzata fornisce dati di volo più completi. La quantità di informazioni disponibili per i piloti continua ad aumentare.
L'integrazione cloud per la configurazione e l'analisi dei dati sta diventando più comune. Stanno emergendo piattaforme online per la condivisione e l'analisi dei dati di volo.
L'integrazione della simulazione con i gemelli digitali consente il test in ambienti virtuali. Ho usato la simulazione per testare le configurazioni prima di applicarle all'hardware reale.
FAQ: Domande comuni sui flight controller
Nel corso degli anni, mi sono state poste innumerevoli domande sui flight controller. Ecco le più comuni:
Qual è la differenza tra i flight controller F4 e F7?
F4 e F7 si riferiscono alla serie di processori STM32 utilizzati nel flight controller. Nella mia esperienza, le principali differenze sono:
I processori F7 sono più potenti (in genere 216-400MHz contro 168-216MHz per F4), consentendo velocità di loop più elevate, filtraggio più complesso e funzionalità aggiuntive. Noto maggiormente la differenza in situazioni impegnative con molto filtraggio.
I controller F7 di solito hanno più UART e prestazioni complessive migliori. Questo è importante quando si collegano più periferiche come GPS, telemetria e controllo della telecamera.
I controller F4 sono più convenienti e ancora sufficienti per la maggior parte degli stili di volo. Molte delle mie build utilizzano ancora schede F4 perché offrono un ottimo equilibrio tra prestazioni e costo.
Per la maggior parte dei piloti, un F4 è perfettamente adeguato, ma se si spingono i limiti delle prestazioni o si ha la necessità di collegare molte periferiche, un F7 vale l'aggiornamento.
Come faccio a sapere se il mio flight controller è danneggiato?
I segni di un flight controller danneggiato includono:
L'impossibilità di accendersi o connettersi tramite USB è il segno più evidente. Se il tuo FC non si accende o non viene riconosciuto dal tuo computer, qualcosa non va.
Letture errate o deriva dei sensori possono indicare danni al giroscopio. Ho visto questo dopo incidenti gravi - il quad diventa incontrollabile a causa di movimenti casuali.
Riavvii o blocchi imprevisti suggeriscono problemi di processore o memoria. Se il tuo quad si disarma casualmente a metà volo, il flight controller potrebbe essere difettoso.
Fumo o danni visibili ai componenti sono un chiaro indicatore. Ho rilasciato il fumo magico da più di un flight controller.
Il surriscaldamento durante il funzionamento può indicare danni interni o cortocircuiti. Se il tuo FC si scalda in modo insolito, qualcosa non va.
Errori persistenti nel configuratore spesso indicano problemi hardware. Se vedi lo stesso errore ripetutamente nonostante il reflashing del firmware, sospetta problemi hardware.
L'impossibilità di armare o mantenere un volo stabile nonostante una configurazione corretta suggerisce problemi del sensore. Ho avuto flight controller che hanno superato tutti i test sul banco ma hanno fallito in volo.
Quale flight controller è il migliore per un principiante?
Per i principianti, consiglio flight controller che sono:
Affidabili e ben supportati, come l'iFlight SucceX-E F4 o il Matek F405-STD. Questi hanno superato la prova del tempo e hanno grandi comunità di utenti.
A un prezzo ragionevole (circa $30-40) per bilanciare qualità e vincoli di budget. Non c'è bisogno di spendere per funzionalità di fascia alta mentre si impara.
Compatibili con Betaflight per una facile configurazione e un'ampia documentazione. L'ecosistema Betaflight ha la maggior parte delle risorse per i principianti.
Ben documentati con un buon supporto della comunità per la risoluzione dei problemi. Quando inevitabilmente si incontrano problemi, avere risorse per aiutare è inestimabile.
Abbastanza robusti da sopravvivere agli incidenti di apprendimento. Cerco schede con rivestimento conforme e design robusto.
Includono funzionalità essenziali senza una complessità travolgente. Funzionalità come OSD e monitoraggio della corrente sono utili, ma le funzionalità avanzate possono aspettare.
I processori F4 sono tipicamente sufficienti per i principianti, con F7 come opzione per chi vuole più spazio per crescere. Ho iniziato con i processori F1 ed ero perfettamente felice finché non ho saputo abbastanza per apprezzare i vantaggi di hardware più avanzati.
Posso usare qualsiasi flight controller con qualsiasi ESC?
La maggior parte dei moderni flight controller può funzionare con la maggior parte degli ESC, ma ci sono considerazioni di compatibilità:
Il supporto del protocollo è fondamentale - assicurarsi che FC ed ESC supportino gli stessi protocolli (DShot, Multishot, ecc.). Preferisco DShot600 per la maggior parte delle build, in quanto offre un buon equilibrio tra prestazioni e affidabilità.
La compatibilità della tensione è importante - verificare che l'FC possa gestire la tensione fornita dagli ESC/PDB. Ho danneggiato flight controller collegandoli a tensioni più alte di quelle per cui erano classificati.
Le connessioni fisiche variano tra singoli fili e cavi a nastro. Assicurarsi che FC ed ESC abbiano metodi di connessione compatibili.
Per gli stack FC/ESC, assicurarsi che siano progettati per funzionare insieme. Mentre è possibile mescolare e abbinare, gli stack progettati come unità offrono tipicamente una migliore integrazione.
In generale, qualsiasi FC di qualità può funzionare con qualsiasi ESC di qualità se configurato correttamente, ma l'abbinamento di componenti spesso fornisce la migliore esperienza. Preferisco usare componenti dello stesso produttore quando possibile, poiché sono progettati per funzionare insieme.
Quanto spesso dovrei aggiornare il firmware del mio flight controller?
Non esiste una pianificazione fissa per gli aggiornamenti del firmware, ma seguo queste linee guida:
Se tutto funziona bene, non sentirsi obbligati ad aggiornare immediatamente. Il vecchio detto "se non è rotto, non aggiustarlo" si applica qui.
Aggiornare per nuove funzionalità quando una release contiene capacità che si desiderano. Ho aggiornato a Betaflight 4.3 specificamente per il migliorato filtraggio RPM.
Aggiornare per correzioni di bug se si riscontrano problemi risolti in una nuova release. Controllo le note di rilascio per vedere se affrontano i problemi che sto avendo.
Per le versioni principali, aspetto alcune settimane dopo il rilascio per il feedback della comunità. Lascia che altri trovino i bug per primi.
Evitare di aggiornare subito prima di gare o viaggi importanti. Ho imparato questa lezione nel modo più duro - un aggiornamento dell'ultimo minuto può introdurre problemi imprevisti.
Eseguire sempre il backup della configurazione prima di aggiornare ed essere preparati a trascorrere del tempo a riconfigurare dopo aggiornamenti significativi. Tengo note sulle mie impostazioni specifiche per ogni quad per rendere questo processo più facile.
Cosa causa il rumore del giroscopio del flight controller?
Il rumore del giroscopio può provenire da diverse fonti:
Le vibrazioni meccaniche di motori, eliche o risonanza del telaio sono la causa più comune. Ho scoperto che un corretto bilanciamento di eliche e motori fa una differenza significativa.
Il rumore elettrico di ESC, sistemi di alimentazione o cablaggio può influenzare le letture del giroscopio. Tenere i fili del segnale lontani dai fili di alimentazione aiuta a ridurre questo problema.
I limiti del sensore creano un livello di rumore intrinseco. Diversi modelli di giroscopio hanno diverse caratteristiche di rumore.
Problemi di montaggio come scarso isolamento o montaggio rigido trasmettono le vibrazioni direttamente al giroscopio. Ora uso il montaggio morbido su tutte le mie build.
I componenti danneggiati possono causare un aumento del rumore. Un giroscopio che è stato sottoposto a incidenti gravi può sviluppare livelli di rumore più elevati.
La riduzione del rumore in genere comporta un migliore isolamento dalle vibrazioni, un cablaggio migliorato, componenti di qualità e impostazioni di filtraggio appropriate. Affronto prima i problemi meccanici, quindi uso il filtraggio software per gestire il rumore rimanente.
Posso trasferire le impostazioni tra flight controller?
Sì, ma con limitazioni:
Il trasferimento delle impostazioni funziona meglio tra lo stesso tipo di firmware (ad es. da Betaflight a Betaflight). Ho avuto risultati contrastanti cercando di trasferire le impostazioni tra diversi tipi di firmware.
Hardware simile fornisce risultati migliori quando si trasferiscono le impostazioni. Passare da una scheda F4 a un'altra scheda F4 simile di solito funziona bene.
L'uso del comando diff all per salvare le impostazioni è il metodo più affidabile. Salvo questo output in un file di testo per ciascuna delle mie build.
Le funzionalità di backup del configuratore funzionano bene per hardware identico. Questo è conveniente ma meno flessibile dei comandi CLI.
Alcune impostazioni richiedono sempre una regolazione manuale per nuovo hardware. In particolare, le mappature delle risorse sono specifiche dell'hardware e non si trasferiscono bene.
Rivedere sempre attentamente le impostazioni trasferite, poiché configurazioni errate possono causare comportamenti imprevisti o incidenti. Dopo aver trasferito le impostazioni, passo attraverso ogni scheda nel configuratore per verificare che tutto sembri corretto.
Qual è la differenza tra filtraggio hardware e software del giroscopio?
La distinzione è importante per capire come ottimizzare le prestazioni:
Il filtraggio hardware è implementato nel sensore giroscopico stesso, fornendo una riduzione iniziale del rumore prima che il segnale raggiunga il processore. Questo varia tra i modelli di giroscopio e non può essere regolato nel firmware.
Il filtraggio software è implementato nel firmware del flight controller ed è personalizzabile attraverso la configurazione. Ciò include filtri notch dinamici, filtri passa-basso e filtraggio basato su RPM.
I moderni flight controller utilizzano una combinazione di entrambi gli approcci. Mi affido al filtraggio hardware come prima linea di difesa, quindi utilizzo il filtraggio software per affrontare le caratteristiche specifiche del rumore della mia build.
Il vantaggio del filtraggio software è la flessibilità: può essere ottimizzato per build e stili di volo specifici. Lo svantaggio è che utilizza potenza di elaborazione e può introdurre latenza.
Conclusione
Il flight controller è veramente il cervello del tuo drone FPV, traducendo le tue intenzioni in un volo preciso. Dopo anni di costruzione e volo, ho imparato ad apprezzare quanto questo componente sia fondamentale per l'esperienza complessiva.
Comprendere la tecnologia del flight controller, i criteri di selezione e le opzioni di configurazione ti consente di ottimizzare le prestazioni per le tue esigenze specifiche e il tuo stile di volo. Che tu stia costruendo il tuo primo drone o il tuo cinquantesimo, scegliere il flight controller giusto e configurarlo correttamente avrà un impatto profondo sulla tua esperienza di volo.
La tecnologia continua a evolversi rapidamente, con processori più potenti, sensori migliori e firmware più sofisticati che forniscono piattaforme sempre più capaci. Padroneggiando la configurazione e la messa a punto del flight controller, sbloccherai il pieno potenziale del tuo drone, ottenendo il perfetto equilibrio di stabilità, reattività e funzionalità per il tuo stile di volo unico.
Ho schiantato più droni di quanti mi piaccia ammettere nel mio viaggio per comprendere questi dispositivi complessi, ma ogni fallimento mi ha insegnato qualcosa di prezioso. La soddisfazione di un quad perfettamente sintonizzato che risponde esattamente come previsto rende utile tutta la risoluzione dei problemi. Non c'è niente di simile alla sensazione di un drone che sembra un'estensione dei tuoi pensieri, e il flight controller è ciò che lo rende possibile.


