Contrôleurs de vol pour drones : principes et fonctionnement
Le contrôleur de vol (FC) est le cerveau de votre drone FPV, traduisant vos commandes de contrôle en commandes de moteur précises nécessaires au vol. Il traite les données de divers capteurs, exécute des algorithmes complexes et effectue des centaines d'ajustements par seconde pour maintenir votre drone stable et réactif. Ce guide complet explore la technologie des contrôleurs de vol, les options de firmware, les critères de sélection, les procédures de configuration et les fonctionnalités avancées pour vous aider à comprendre et à optimiser ce composant essentiel.
Introduction aux contrôleurs de vol
Après des années de construction et de pilotage de drones FPV, j'en suis venu à apprécier qu'aucun composant n'influence plus votre expérience de vol que le contrôleur de vol. Je me souviens encore de ma première construction avec une carte KK primitive qui maintenait à peine le drone stable. Aujourd'hui, les processeurs H7 sophistiqués des contrôleurs de vol modernes effectuent des calculs complexes qui auraient semblé relever de la science-fiction il y a seulement quelques années.

Un contrôleur de vol est une carte de circuit spécialisée contenant un microprocesseur, divers capteurs et des connexions d'entrée/sortie. Il sert d'unité centrale de traitement de votre drone, remplissant plusieurs fonctions essentielles :
• Stabilisation : Maintenir un vol stable et compenser les forces externes
• Traitement des commandes de contrôle : Traduire les mouvements de vos sticks en commandes moteur
• Intégration des capteurs : Collecter et traiter les données des gyroscopes, accéléromètres, etc.
• Gestion des fonctionnalités : Gérer les modes comme acro, angle, maintien GPS, et plus
• Communication périphérique : Interfacer avec les récepteurs, ESC, caméras et autres composants
L'évolution des contrôleurs de vol
J'ai été témoin de l'évolution spectaculaire des contrôleurs de vol depuis 2019, lorsque j'ai commencé mon passe-temps.
Tout a commencé avec des processeurs 8 bits de base qui pouvaient à peine gérer une stabilisation simple. Le passage aux contrôleurs 32 bits vers 2014 a été révolutionnaire - soudainement, les quads étaient capables d'un contrôle beaucoup plus précis et de fonctionnalités avancées. La progression a été remarquable :
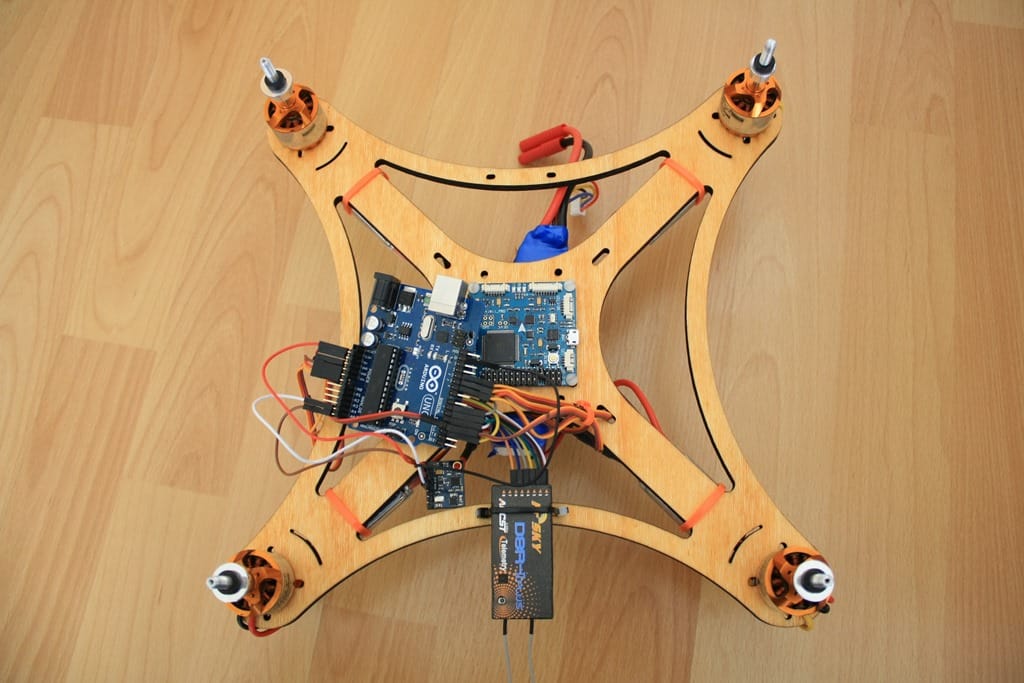
• Premiers FC (2010-2013) : Stabilisation de base avec des fonctionnalités limitées. Les constructions avec une carte MultiWii nécessitaient une attention constante juste pour maintenir un vol stable.
• Révolution 32 bits (2014-2016) : Traitement plus rapide et meilleurs algorithmes. Le Naze32 a changé la donne - soudainement, les quads donnaient l'impression d'être des machines complètement différentes.
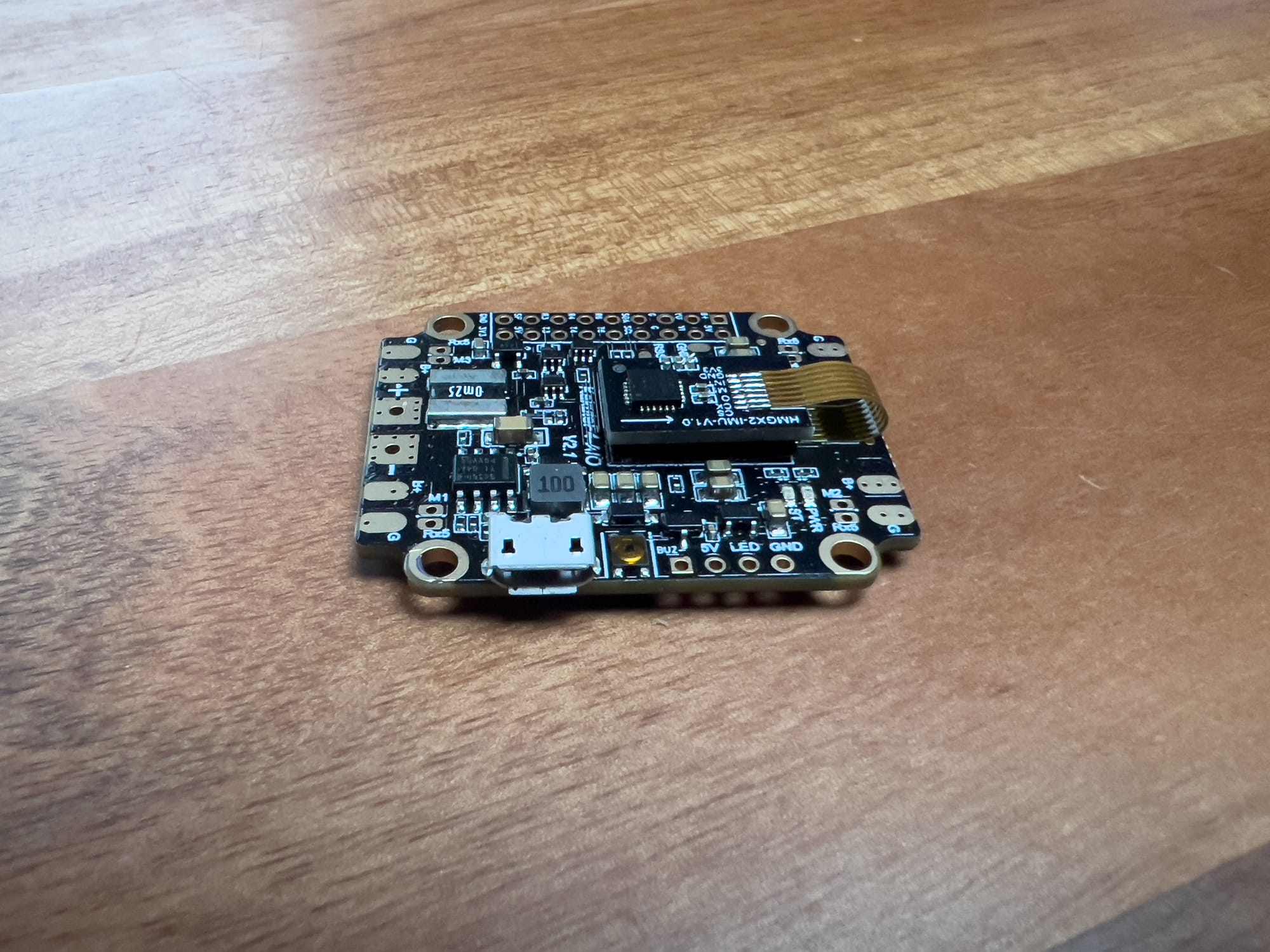
• Ère moderne (2017-présent) : Processeurs F4/F7 puissants et composants intégrés. J'ai constaté que ces contrôleurs de vol modernes peuvent gérer des filtres complexes et des taux de boucle élevés qui rendent même le freestyle agressif d'une fluidité exceptionnelle.
• Prochaine génération (2023+) : Processeurs H7 avec capacités d'apprentissage automatique et fusion de capteurs améliorée. Ce sont des contrôleurs de pointe, et la différence de performance en vol est subtile mais perceptible, en particulier dans des conditions difficiles.
Cette progression a conduit à des contrôleurs de vol plus petits et plus performants, avec des fonctionnalités et des performances de plus en plus sophistiquées. Je me souviens même de l'époque où un contrôleur de vol avait la taille d'une carte de crédit - maintenant, ils sont souvent plus petits qu'un timbre-poste tout en faisant bien plus.
Composants de base d'un contrôleur de vol
Les contrôleurs de vol modernes intègrent plusieurs composants clés qui fonctionnent ensemble pour créer l'expérience de vol. Permettez-moi de vous expliquer ce que j'ai appris sur ces composants au fil des années de construction et de dépannage.
Microprocesseur
L'unité de calcul centrale est généralement un processeur STM32, et le type fait une différence significative dans les performances. J'ai piloté tout, des processeurs F1 aux H7, et voici ce que j'ai constaté :
• Processeurs F1 : Anciennes puces 32 bits maintenant obsolètes. J'en ai piloté quelques-unes pour le plaisir, et bien qu'elles fassent le travail, les limitations étaient frustrantes.
• Processeurs F3 (72MHz) : Largement obsolètes maintenant, mais ils représentaient une solide avancée par rapport aux F1. J'ai piloté une configuration basée sur F3 et c'était en fait assez satisfaisant.
• Processeurs F4 (168-216MHz) : Encore courants et parfaitement capables pour la plupart des styles de vol. J'utilise encore une carte F4 dans une configuration éducative car elles offrent un excellent équilibre entre performance et coût.
• Processeurs F7 (216-400MHz) : Le standard actuel, avec une puissance de traitement supplémentaire qui est notable dans les situations exigeantes. Lorsque j'ai passé mon principal quad freestyle à un F7, j'ai immédiatement remarqué l'amélioration de la gestion des filtres complexes et des taux de boucle plus élevés.
• Processeurs H7 (400-480MHz) : Émergent comme l'option haut de gamme. J'en teste un dans ma configuration de course, et bien que les différences soient subtiles, la marge de manœuvre pour les fonctionnalités futures est significative.
Le processeur détermine la puissance de calcul du contrôleur de vol, affectant sa capacité à exécuter des algorithmes complexes et à maintenir des temps de boucle élevés. J'ai appris que si le processeur n'est pas tout, il fixe le plafond de ce que votre contrôleur de vol peut accomplir.
Capteurs
Les capteurs sur un contrôleur de vol sont essentiels pour la stabilité du vol et la mise en œuvre des fonctionnalités. J'ai crashé plus d'un drone à cause de problèmes de capteurs, j'ai donc appris à accorder une attention particulière à cet aspect.
• Gyroscope : Mesure les taux de rotation autour de trois axes (tangage, roulis, lacet). C'est le capteur le plus critique, et j'ai constaté que la qualité du gyroscope fait une différence notable dans les performances de vol. Un gyroscope bruyant entraîne un comportement saccadé et imprévisible qu'aucun réglage ne peut complètement corriger.
• Accéléromètre : Mesure l'accélération linéaire et est crucial pour le mode angle. J'utilise rarement le mode angle ces jours-ci, mais lorsque je laisse un ami essayer de piloter un de mes drones, je suis reconnaissant d'avoir un accéléromètre bien calibré.
• Baromètre : Mesure la pression atmosphérique pour l'estimation de l'altitude. J'ai trouvé que ceux-ci sont aléatoires en termes de fiabilité - ils sont affectés par le souffle des hélices et les conditions météorologiques changeantes. Pour un maintien d'altitude sérieux, je préfère le GPS.
• Magnétomètre (Boussole) : Détermine l'orientation par rapport au nord magnétique. D'après mon expérience, ils sont très sensibles aux interférences des systèmes d'alimentation et des moteurs. Je les monte toujours le plus loin possible des fils d'alimentation.
• GPS : Fournit des données de position pour les fonctionnalités de navigation. J'ai appris à mes dépens que tous les modules GPS ne sont pas créés égaux - dépenser un peu plus pour un module avec une meilleure réception satellite m'a évité de perdre des drones lors de vols longue portée. Voir aussi : Technologie GNSS pour drones
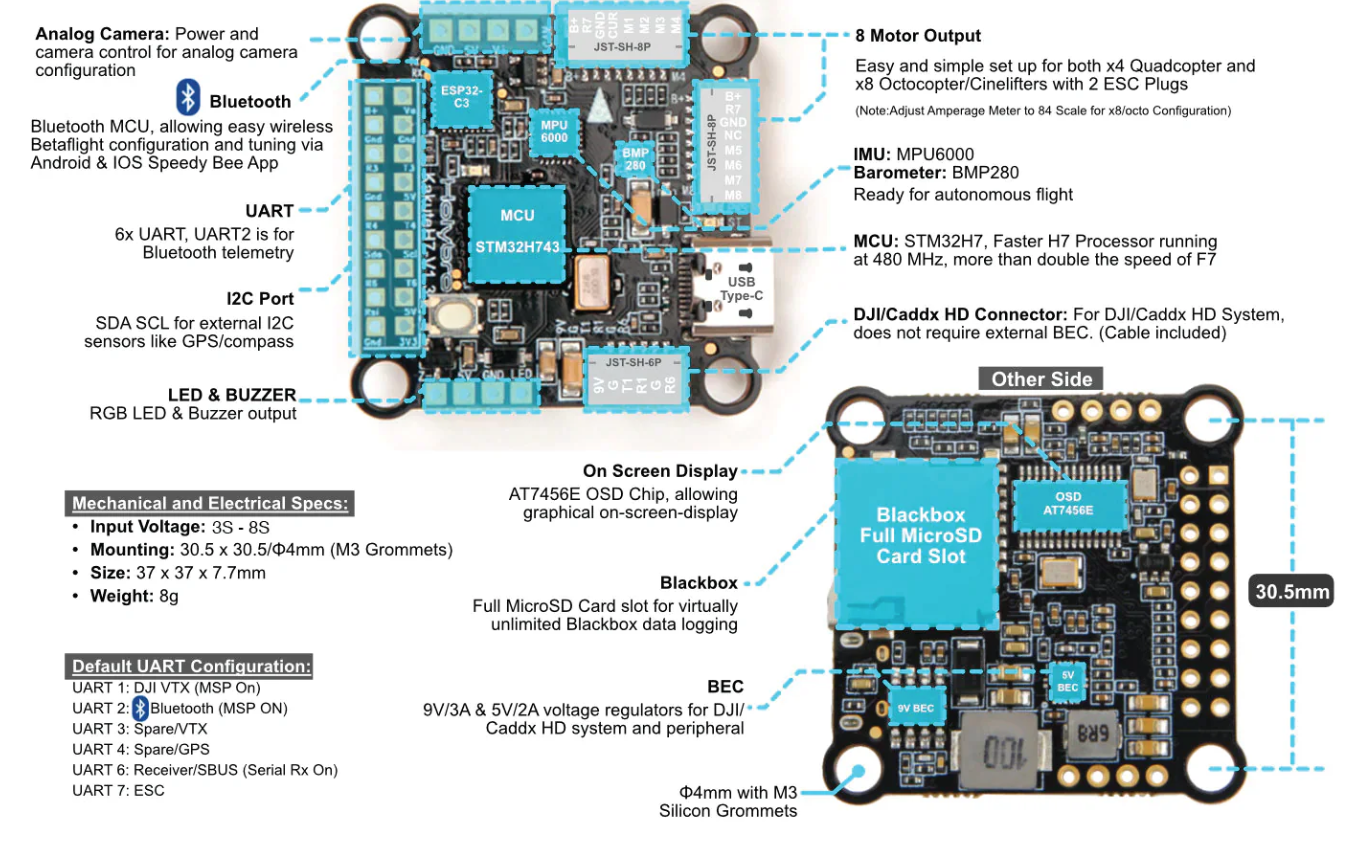
Interfaces d'entrée/sortie
Les connexions pour les périphériques et autres composants sont ce qui rend un contrôleur de vol polyvalent. J'ai construit tout, des quadricoptères de course minimalistes aux machines complexes longue portée, et les interfaces disponibles font toute la différence.
• Ports UART : Fournissent une communication série avec les récepteurs, le GPS, la télémétrie, etc. J'ai constaté qu'avoir au moins 4-5 UART me donne la flexibilité dont j'ai besoin pour la plupart des configurations. Manquer d'UART est frustrant et nécessite souvent des compromis.
• Bus I2C : Permet la communication avec certains périphériques et capteurs. J'ai eu des expériences mitigées avec I2C - c'est pratique mais peut être sujet à des problèmes de bruit s'il n'est pas correctement implémenté.
• Bus SPI : Offre une communication à haute vitesse avec les gyroscopes et autres appareils. C'est essentiel pour les performances, et j'ai remarqué que les contrôleurs de vol avec des bus SPI bien implémentés ont tendance à avoir des signaux gyroscopiques plus propres.
• Sorties moteur : Se connectent aux ESC pour le contrôle des moteurs. La tendance vers les protocoles DShot a été un changement de donne dans mon expérience - la précision numérique élimine de nombreux maux de tête de calibrage auxquels j'étais confronté auparavant. Voir aussi : Moteurs de drones FPV et ESC de drones FPV
• Port USB : Utilisé pour la configuration et les mises à jour du firmware. J'ai appris à vérifier la qualité de cette connexion - un port USB fragile est souvent la première chose à casser sur un contrôleur de vol.
Gestion de l'alimentation
Les circuits d'alimentation fournissent une alimentation propre et régulée, et j'ai appris à ne pas sous-estimer leur importance. Au début de mon parcours FPV, j'ai rencontré des problèmes de vol mystérieux qui ont finalement été attribués à des problèmes d'alimentation.
• Régulateurs de tension : Convertissent la tension de la batterie en 5V et 3,3V pour l'électronique. J'ai constaté que des régulateurs de qualité font une différence significative dans la fiabilité globale du système, en particulier sur les configurations à haute puissance.
• Condensateurs de filtrage : Lissent la distribution de l'alimentation et réduisent le bruit. J'ajoute toujours des condensateurs supplémentaires à mes configurations - c'est une assurance bon marché contre le bruit électrique qui peut affecter les lectures des capteurs.
• Circuits de protection : Empêchent les dommages causés par les pics de tension ou l'inversion de polarité. J'ai grillé plus d'un contrôleur de vol en connectant une batterie à l'envers, donc je recherche maintenant des cartes avec une protection robuste.
Pour des informations plus détaillées sur l'alimentation de votre drone, voir :
Aperçu des types et de la chimie des batteries de drones
Matériel du contrôleur de vol
Au fil des années, j'ai utilisé des dizaines de contrôleurs de vol différents dans diverses configurations, et j'ai développé des opinions tranchées sur ce qui fonctionne le mieux pour différentes applications.
Classifications des contrôleurs de vol
Par type de processeur
Le processeur est le moyen le plus courant de classer les contrôleurs de vol, et j'ai constaté que le choix du bon processeur pour vos besoins est crucial.
Les contrôleurs de vol F4 (168-216MHz) offrent un bon équilibre entre performances et coût. Je les utilise dans la plupart de mes configurations car ils sont suffisants pour toutes les applications sauf les plus exigeantes. Les Betaflight F4, Matek F405 et iFlight SucceX-E F4 m'ont tous bien servi.
Les contrôleurs de vol F7 (216-400MHz) fournissent plus d'UART et de fonctionnalités. Je les utilise dans les configurations où j'ai besoin de connecter plusieurs périphériques ou veux les meilleures performances de filtrage possibles. Les Matek F722, SpeedyBee F7 et iFlight SucceX-E F7 sont parmi mes préférés.
Les contrôleurs de vol H7 (400-480MHz) représentent la pointe de la technologie avec une capacité de traitement maximale. Je teste actuellement les SpeedyBee H7 et Matek H743, et bien que les améliorations de performances par rapport au F7 soient subtiles, ils sont définitivement à l'épreuve du futur pour les fonctionnalités avancées.
Par facteur de forme
Les contrôleurs de vol sont disponibles dans des schémas de montage standardisés, et le choix de la bonne taille est essentiel pour votre configuration.
Le montage standard (30,5×30,5mm) est la taille la plus courante pour les configurations de 5" et plus. Je les utilise dans la plupart de mes quads freestyle et longue portée car ils offrent le plus de fonctionnalités et d'options de connectivité.
Le montage 20×20mm est courant dans les configurations de 3" et moins. J'ai constaté que ces petites cartes ont fait beaucoup de progrès en termes de fonctionnalités, bien que vous aurez généralement moins d'UART et d'options de connexion.
Le montage 16×16mm est utilisé dans les micro-configurations et les tiny whoops. Ils sont incroyablement compacts, et je suis toujours étonné de la quantité de fonctionnalités que les fabricants peuvent intégrer dans un si petit espace.
AIO (All-In-One) combine le FC avec d'autres composants comme les ESC. J'ai appris à apprécier ceux-ci pour certains montages - ils simplifient le câblage et peuvent réduire le poids, bien qu'ils constituent un point unique de défaillance.
Par intégration de fonctionnalités
Les contrôleurs de vol modernes intègrent souvent des composants supplémentaires, et j'ai constaté que le choix du bon niveau d'intégration peut grandement faciliter la construction.
FC Only les cartes fournissent uniquement la fonctionnalité de contrôleur de vol. Je les utilise encore dans la plupart de mes montages où je veux un maximum de flexibilité dans le choix des composants.
FC+PDB les combinaisons incluent la distribution d'énergie. Elles permettent d'économiser de l'espace et de simplifier le câblage.
FC+ESC (4-en-1) les stacks combinent le FC avec les ESC. Ils réduisent considérablement le temps de montage et créent une configuration plus propre et plus fiable.
FC+ESC+VTX les solutions tout-en-un incluent l'émetteur vidéo. J'ai eu des expériences mitigées avec ceux-ci - ils sont pratiques mais peuvent chauffer, et si un composant tombe en panne, vous remplacez tout.
FC+ESC+VTX+RX les stacks de vol complets incluent le récepteur. Ils offrent une intégration maximale et, bien que j'étais sceptique au début, certaines des nouvelles implémentations fonctionnent étonnamment bien.
Principales caractéristiques matérielles à prendre en compte
Lors de la sélection d'un contrôleur de vol, j'ai appris à prêter attention à plusieurs caractéristiques matérielles qui peuvent faire ou défaire votre expérience de vol.
Nombre et disponibilité des UART
Les UART sont des ports série utilisés pour connecter des périphériques, et j'ai constaté qu'en avoir suffisamment est crucial pour la flexibilité.
Je considère que 3 UART est le minimum absolu (récepteur, télémétrie et un de rechange). J'ai construit des quads avec seulement 3 UART, mais cela semble toujours limitant.
4-5 UART offrent une configuration confortable pour la plupart des montages. Cela me donne suffisamment de connexions pour un récepteur, la télémétrie, le GPS et peut-être le contrôle de la caméra ou le contrôle des LED.
6+ UART offrent une flexibilité maximale pour des configurations complexes. Mes montages longue portée utilisent généralement autant de connexions pour divers périphériques et systèmes de secours.
J'ai appris à mes dépens que tous les UART ne sont pas égaux - certains peuvent être partagés avec d'autres fonctions ou avoir des limitations. Vérifiez toujours soigneusement la documentation.
Type de gyroscope et implémentation
Le gyroscope est essentiel pour les performances de vol, et j'ai développé de fortes préférences basées sur des années de tests.
La série MPU6000 de gyroscopes sont fiables avec un niveau de bruit plus faible. Je les préfère pour les montages de course où chaque bit de performance compte. Ils sont de plus en plus difficiles à trouver sur les nouvelles cartes, mais ils restent mon premier choix lorsqu'ils sont disponibles.
Les gyroscopes ICM20602/ICM20689 offrent de bonnes performances et sont courants dans les FC modernes. Je les ai trouvés parfaitement adéquats pour la plupart des styles de vol, bien que légèrement plus sensibles au bruit que le MPU6000.
Le BMI270 est un capteur plus récent offrant d'excellentes performances. J'ai été impressionné par sa gestion du bruit dans mes constructions récentes, et il semble devenir la nouvelle norme.
La méthode de montage est également importante - les gyroscopes à montage souple et à montage rigide gèrent différemment les vibrations. Je préfère les contrôleurs de vol avec des gyroscopes bien isolés, car ils sont moins affectés par les vibrations qui sont inévitables dans les quads haute performance.
Calibre du capteur de courant
Pour les montages avec détection de courant intégrée, le choix du bon calibre est important pour une gestion précise de la batterie.
Les drones de course nécessitent généralement un calibre de 30-60A. J'ai constaté qu'aller trop haut réduit la résolution et la précision pour ces montages plus légers.
Les drones freestyle fonctionnent mieux avec un calibre de 50-100A. Mes montages freestyle peuvent tirer un courant important lors de manœuvres agressives, il est donc important d'avoir de la marge.
Les configurations longue portée et cinématiques nécessitent généralement un calibre de 40-80A. Ces montages ont tendance à avoir un tirage de courant plus constant, donc la précision est plus importante que la plage extrême.
La résolution (profondeur de bits) fournit des lectures plus précises. J'ai constaté que les capteurs de courant à plus haute résolution font une différence notable dans la précision de mes avertissements de batterie et de ma télémétrie.
Enregistrement Blackbox
Pour la journalisation et le réglage, la capacité blackbox est essentielle, et j'ai utilisé diverses approches en fonction du montage.
La mémoire flash intégrée (généralement 8-16 Mo) est pratique mais limitée en capacité. Je l'utilise pour des sessions de réglage rapides, mais elle se remplit rapidement à des taux d'enregistrement élevés.
Les emplacements pour cartes SD offrent une capacité de stockage beaucoup plus grande mais ajoutent de la complexité. Pour les travaux de réglage sérieux, je préfère les contrôleurs de vol avec prise en charge des cartes SD - la possibilité d'enregistrer des vols entiers à des taux élevés est inestimable.
Certains FC n'ont pas de stockage et nécessitent un enregistreur externe pour les données blackbox. J'évite ceux-ci dans la mesure du possible, car l'enregistreur externe ajoute du poids et de la complexité.
Fonctionnalités matérielles supplémentaires
Au fil des années, j'en suis venu à apprécier plusieurs autres fonctionnalités qui améliorent l'expérience de vol.
L'OSD (affichage à l'écran) intégré pour le flux FPV est quelque chose que je considère maintenant comme essentiel. Pouvoir voir la tension de la batterie, le temps de vol et d'autres informations critiques pendant le vol a sauvé beaucoup de mes drones des crashs ou des dommages à la batterie.
Un baromètre pour le maintien d'altitude peut être utile dans certaines situations. Je n'utilise pas souvent cette fonctionnalité, mais lors du tournage de séquences cinématiques, un maintien d'altitude fiable est précieux.
Les sorties de contrôle LED pour les bandes LED facilitent le vol de nuit et l'identification des drones. J'ai pris goût aux LED adressables sur mes montages - elles ne sont pas seulement pour le spectacle, elles sont vraiment utiles pour l'orientation et l'indication d'état.
Les sorties de buzzer pour localiser les drones écrasés m'ont fait gagner des heures de recherche. Je ne construis plus jamais un quad sans buzzer maintenant - il est trop facile de perdre de vue un drone sombre dans les hautes herbes ou les arbres.
Le contrôle de la caméra pour ajuster les paramètres de la caméra en vol est un luxe que j'en suis venu à apprécier. Pouvoir ajuster l'exposition ou d'autres paramètres sans atterrir est particulièrement utile pour les conditions d'éclairage changeantes.
Firmware du contrôleur de vol
Le firmware est le logiciel qui s'exécute sur le matériel du contrôleur de vol, déterminant ses capacités et son comportement. J'ai essayé la plupart des options disponibles, et chacune a ses forces et ses faiblesses.
Principales options de firmware
Plusieurs options de firmware sont disponibles, et j'ai passé du temps avec chacune d'elles pour comprendre leurs caractéristiques uniques.
Betaflight
Betaflight est le firmware le plus populaire pour les drones FPV, et c'est ce que j'utilise sur la plupart de mes montages. Il se concentre sur les performances de course et de freestyle, avec d'excellentes caractéristiques de vol et un développement actif.
Les forces de Betaflight comprennent ses performances de vol exceptionnelles, sa communauté de développement active et sa grande base d'utilisateurs. Lorsque j'ai un problème avec Betaflight, je peux généralement trouver quelqu'un qui l'a déjà résolu.
Ses faiblesses incluent des fonctionnalités autonomes limitées et une courbe d'apprentissage plus raide. J'ai passé d'innombrables heures dans le configurateur Betaflight à ajuster les paramètres, ce qui peut être intimidant pour les nouveaux venus.
Betaflight est idéal pour la course, le freestyle et le vol FPV en général. Si vous êtes principalement intéressé par le vol acrobatique ou la course, il est difficile de faire mieux.
INAV
INAV se concentre sur les fonctionnalités de navigation et d'autonomie, et je l'utilise sur mes configurations longue portée et de cartographie. Ses modes GPS, retour au point de départ et capacités de points de cheminement sont excellents.
Les forces d'INAV sont ses fonctionnalités de navigation complètes et son vol autonome fiable. J'ai eu des drones INAV qui sont revenus de kilomètres lorsque j'ai perdu le signal vidéo.
Ses faiblesses incluent d'être moins optimisé pour le vol de performance pure. Bien qu'INAV ait amélioré ses performances acro, il n'égale toujours pas tout à fait Betaflight pour la course ou le freestyle.
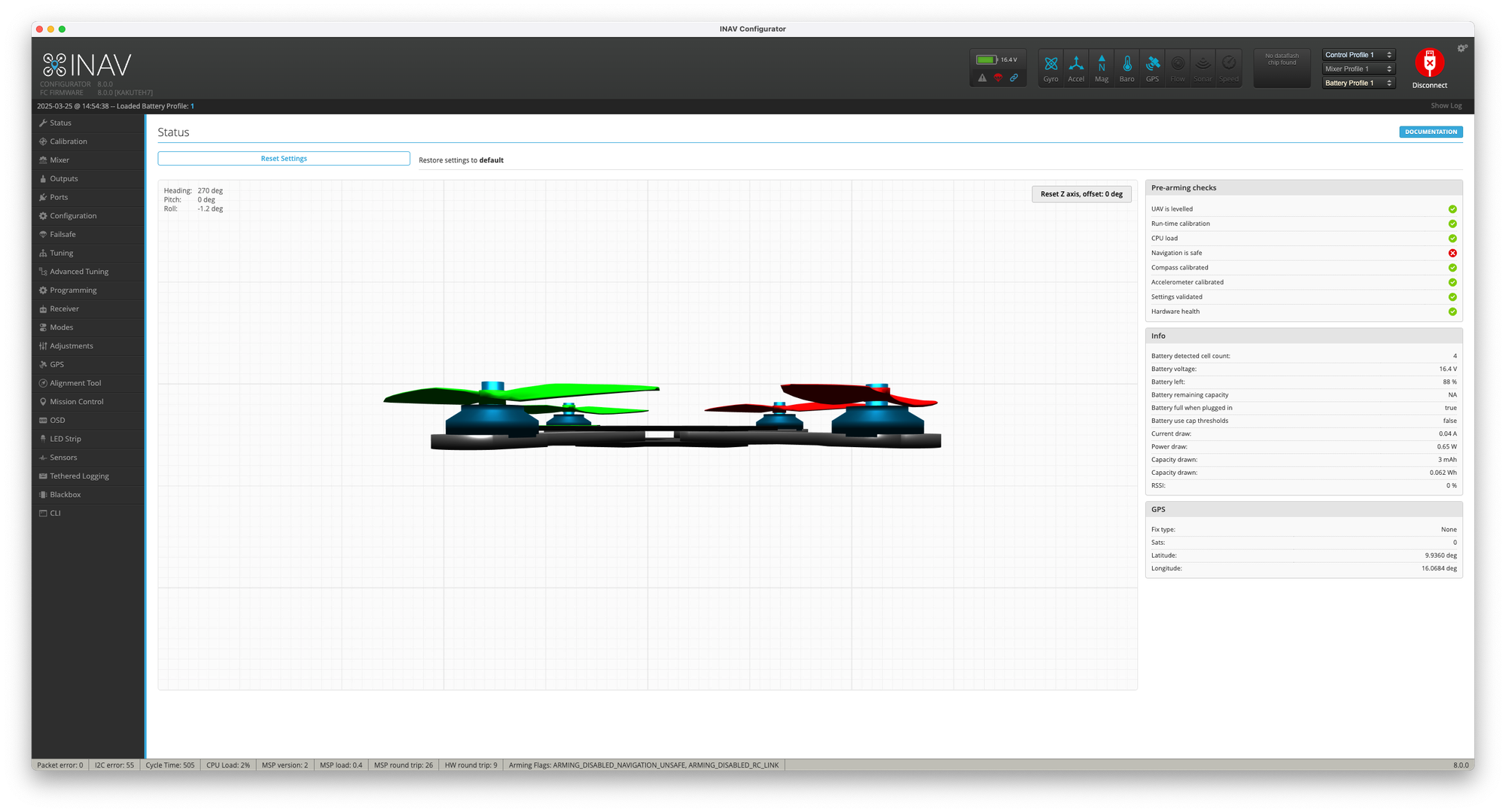
INAV est idéal pour le vol longue portée, la cartographie et les missions autonomes. Si vous êtes intéressé par l'exploration plutôt que par l'acrobatie, INAV vaut la peine d'être envisagé.
KISS
KISS adopte une approche simplifiée avec un accent sur le code propre. J'ai utilisé KISS sur quelques configurations, et sa simplicité est rafraîchissante.
Les forces de KISS incluent une configuration facile et de bonnes caractéristiques de vol dès la sortie de la boîte. J'ai été impressionné par le peu de réglage nécessaire pour faire voler correctement un quad alimenté par KISS.
Ses faiblesses incluent le fait d'être fermé et d'avoir des options matérielles limitées. L'écosystème est plus petit, ce qui signifie moins de ressources lorsque des problèmes surviennent.
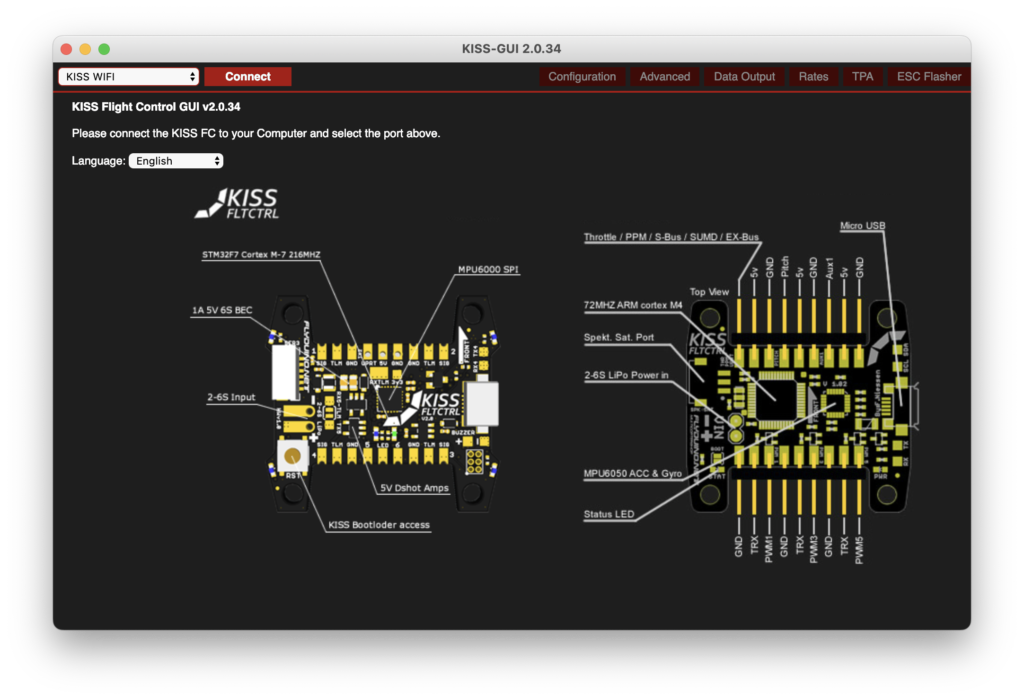
KISS est idéal pour les pilotes recherchant la simplicité avec de bonnes performances. Si vous voulez passer plus de temps à voler et moins de temps à configurer, KISS vaut le coup d'œil.
Emuflight
Emuflight est un fork de Betaflight avec des approches alternatives du contrôle de vol. Je l'ai expérimenté sur quelques configurations, en particulier pour le vol cinématique.
Les forces d'Emuflight incluent sa sensation de vol unique et de bonnes performances pour certains styles de vol. Je l'ai trouvé particulièrement bon pour le freestyle fluide et coulant.
Ses faiblesses incluent une communauté plus petite et des mises à jour moins fréquentes. Lorsque des problèmes surviennent, il y a moins de ressources disponibles par rapport à Betaflight.
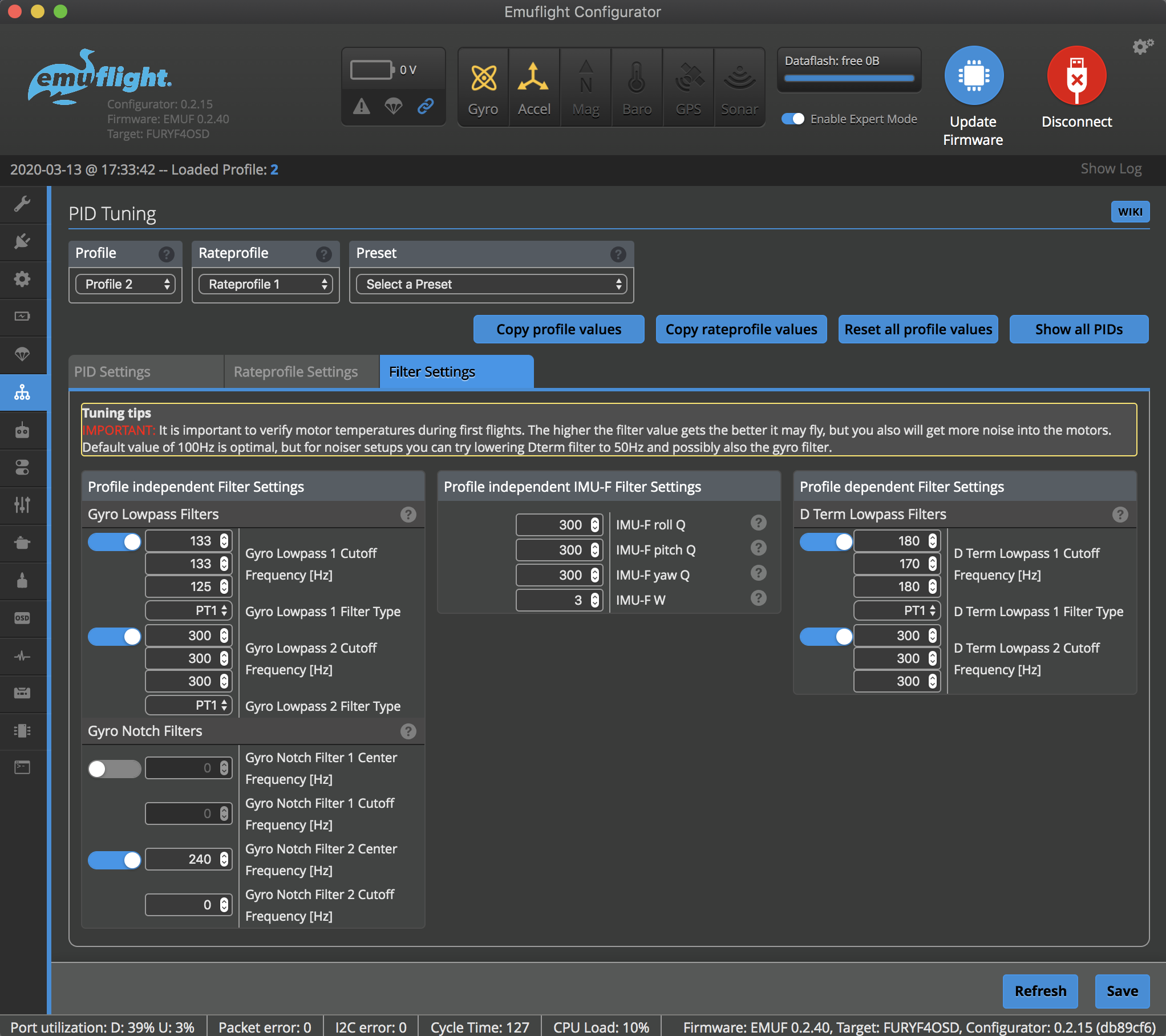
Emuflight est idéal pour les pilotes recherchant des caractéristiques de vol spécifiques, en particulier ceux qui privilégient la fluidité à la réactivité absolue.
Ardupilot/PX4
Ardupilot et PX4 sont des systèmes de pilotage automatique open source de niveau professionnel. Je les ai utilisés pour des travaux de cartographie et de relevé plus sérieux.
Les forces de ces systèmes incluent une planification de mission complète et des fonctionnalités professionnelles. Le niveau de capacité autonome dépasse de loin ce qui est disponible dans les autres options de firmware.
Leurs faiblesses incluent une configuration complexe et une optimisation moindre pour l'agilité. Ce ne sont pas des systèmes que je choisirais pour le freestyle ou la course.
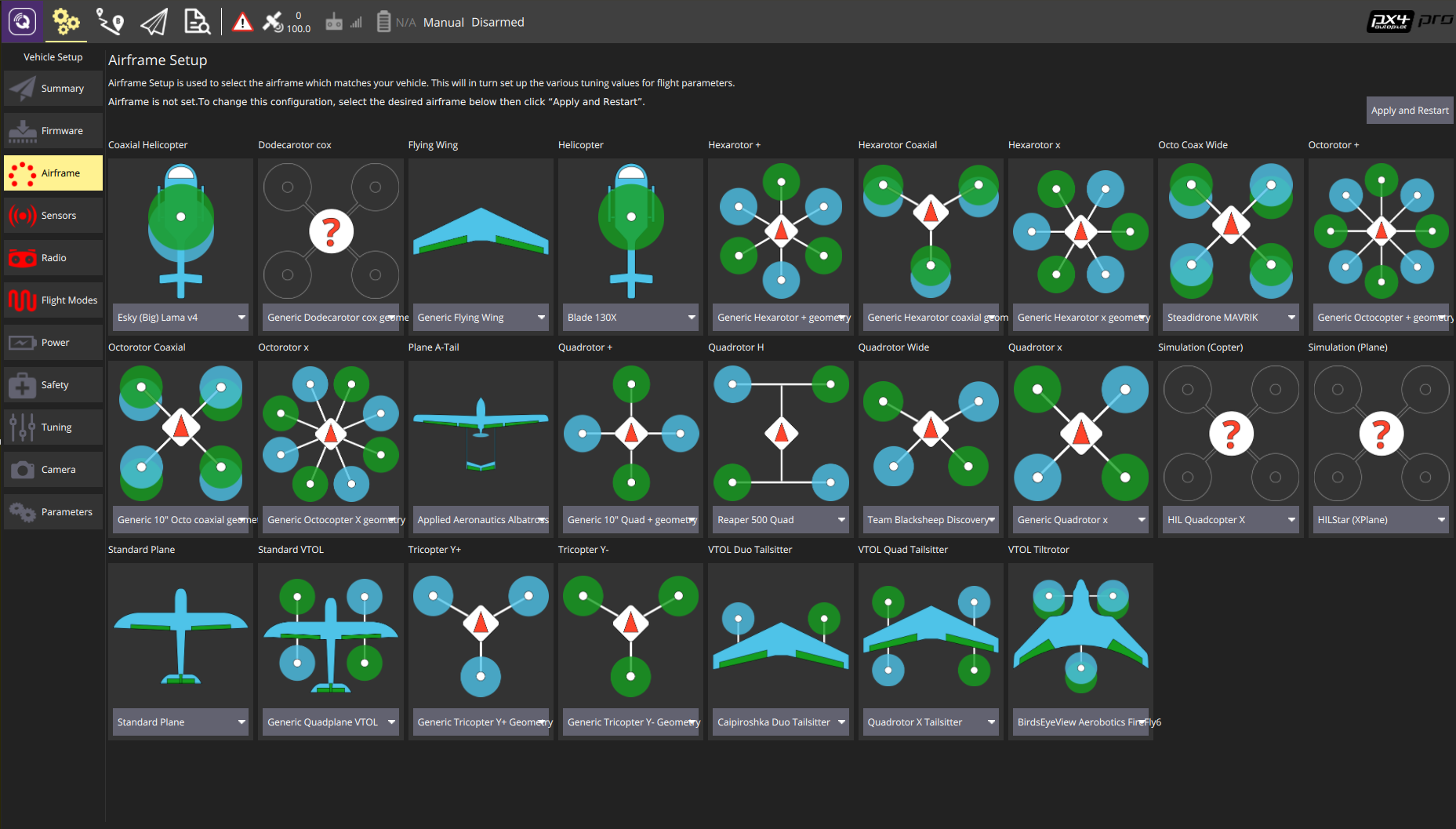
Ardupilot et PX4 sont idéaux pour la cartographie, les travaux de relevé et les applications professionnelles où la fiabilité et les capacités autonomes sont plus importantes que l'agilité.
Comparaison des fonctionnalités du firmware
En utilisant ces différentes options de firmware, j'ai développé une idée de leurs forces relatives dans différents domaines :
| Fonctionnalité | Betaflight | INAV | KISS | Emuflight | Ardupilot |
|---|---|---|---|---|---|
| Mode Acro | ★★★★★ | ★★★★☆ | ★★★★★ | ★★★★★ | ★★★☆☆ |
| Modes GPS | ★★☆☆☆ | ★★★★★ | ★★☆☆☆ | ★★☆☆☆ | ★★★★★ |
| Options OSD | ★★★★☆ | ★★★★☆ | ★★★☆☆ | ★★★★☆ | ★★★☆☆ |
| Facilité de configuration | ★★★☆☆ | ★★☆☆☆ | ★★★★★ | ★★★☆☆ | ★☆☆☆☆ |
| Support de la communauté | ★★★★★ | ★★★★☆ | ★★★☆☆ | ★★★☆☆ | ★★★★☆ |
| Fréquence des mises à jour | ★★★★★ | ★★★★☆ | ★★☆☆☆ | ★★★☆☆ | ★★★★☆ |
| Options matérielles | ★★★★★ | ★★★★☆ | ★★☆☆☆ | ★★★★☆ | ★★★☆☆ |
Choisir le bon contrôleur de vol
Le choix du contrôleur de vol approprié dépend de vos besoins spécifiques et des exigences de votre configuration. Après avoir construit des dizaines de drones différents, j'ai développé quelques lignes directrices pour différentes applications.
Pour les drones de course
Lors de la construction de drones de course, je donne la priorité à la performance, la fiabilité et la simplicité. Chaque gramme compte et les fonctionnalités inutiles ne font qu'ajouter du poids.
Je recommande un processeur F4 ou F7 pour des taux de boucle élevés. Bien que le F7 ait plus de puissance de traitement, de nombreux pilotes de course de haut niveau utilisent encore des cartes F4 car elles sont plus légères et parfaitement capables de gérer les exigences de la course.
Pour le gyroscope, je préfère la série MPU6000 ou l'ICM20602 pour leur fiabilité. Un signal gyroscopique propre est essentiel pour la course, où de petites perturbations peuvent affecter la maniabilité à haute vitesse.
Le format devrait être de 20×20mm pour les constructions compactes ou de 30,5×30,5mm pour les constructions standard. J'ai déplacé la plupart de mes configurations de course vers du 20×20mm pour économiser du poids et de l'espace.
En termes d'intégration, une pile FC+ESC crée des constructions propres avec un câblage minimal. Cela réduit le poids et le risque de défaillances du câblage, qui sont fréquentes lors des crashs en course.
Pour le firmware, j'utilise exclusivement Betaflight optimisé pour la course. Les paramètres par défaut se sont beaucoup améliorés, mais j'effectue toujours des ajustements pour mon style de pilotage spécifique.
Quelques exemples de contrôleurs de vol avec lesquels j'ai eu du succès pour la course incluent le iFlight SucceX-E F4/F7, le T-Motor F7 et le SpeedyBee F4/F7.
Pour les drones freestyle
Pour les drones freestyle, je donne la priorité à la fiabilité, un ensemble complet de fonctionnalités et la performance. Ces configurations subissent plus d'abus que toutes les autres, donc la durabilité est essentielle.
Je recommande un processeur F7 pour un meilleur filtrage et plus de fonctionnalités. La puissance de traitement supplémentaire aide avec le filtrage complexe, ce qui est important pour les rapports puissance/poids élevés courants dans les configurations freestyle.
Le gyroscope doit être bien isolé pour un signal propre. Le freestyle implique des manœuvres à haute puissance qui créent beaucoup de vibrations, donc une bonne isolation fait une différence significative.
Un capteur de courant précis est important pour la gestion de la batterie. Le vol freestyle peut impliquer des changements rapides de demande de puissance, donc connaître l'état de votre batterie est crucial.
La capacité Blackbox via flash intégrée ou carte SD est essentielle pour le réglage. J'ai constaté qu'un réglage approprié fait une énorme différence dans les performances freestyle, et les données Blackbox sont la clé d'un bon réglage.
Un OSD complet fournit des informations importantes en vol. Je compte sur mon OSD pour me dire quand il est temps d'atterrir, ce qui est facile à oublier quand on s'amuse avec des figures freestyle.
Les contrôleurs de vol avec lesquels j'ai eu de bonnes expériences pour le freestyle incluent le Matek F722-SE, le Holybro Kakute F7 et le Diatone Mamba F722.
Pour les drones longue portée/cinématiques
Pour les applications longue portée et cinématiques, je donne la priorité à la fiabilité, aux fonctionnalités GPS et à l'efficacité énergétique. Ces configurations doivent être fiables lorsqu'elles volent loin de la maison.
Je recommande un processeur F7 pour gérer le GPS et autres périphériques. Les UART supplémentaires et la puissance de traitement sont précieuses pour les multiples systèmes généralement présents sur les configurations longue portée.
Un baromètre est utile pour le maintien d'altitude et les fonctionnalités associées. Lorsqu'on vole loin, avoir des informations d'altitude fiables est important pour la navigation et la gestion de la batterie.
Plusieurs UART sont nécessaires pour le GPS, la télémétrie, le contrôle de la caméra, etc. Mes configurations longue portée utilisent généralement au moins 5-6 UART pour divers systèmes.
La prise en charge du firmware INAV est importante pour les fonctionnalités de navigation. Bien que Betaflight ait des capacités GPS de base, INAV est bien supérieur pour les tâches de navigation sérieuses.
Un filtrage d'alimentation propre est essentiel pour des temps de vol prolongés. Le vol longue portée est une question d'efficacité, et une alimentation propre aide à maximiser le temps de vol.
Les contrôleurs de vol qui m'ont bien servi pour ces applications incluent le Matek F765-WING, le Holybro Kakute H7 et le iFlight Beast H7.
Pour les micro-constructions
Lors de la construction de micro-drones, je donne la priorité à la taille, au poids et à l'intégration. Chaque composant doit être aussi petit et léger que possible.
Le format devrait être de 16×16mm ou 20×20mm pour s'adapter aux cadres compacts. J'ai été étonné de voir à quel point ces minuscules contrôleurs de vol sont devenus performants.
Les conceptions AIO avec ESC intégrés simplifient la construction et économisent de l'espace. Dans les plus petites constructions, des composants séparés ne sont tout simplement pas pratiques.
Des composants ultra-légers sont essentiels pour de bonnes performances de vol. Un contrôleur de vol lourd dans une micro-construction affectera sensiblement la maniabilité.
Une conception simplifiée avec seulement les fonctionnalités essentielles aide à minimiser le poids. Des fonctionnalités comme les baromètres et les UART supplémentaires sont souvent omises pour économiser du poids.
Les contrôleurs de vol que j'ai utilisés avec succès dans les micro-constructions incluent le HGLRC Zeus F4/F7 AIO, le BetaFPV F4 AIO et le NamelessRC F4/F7 AIO.
Pour les débutants
Pour les débutants, je recommande de donner la priorité à la facilité d'utilisation, la durabilité et le rapport qualité-prix. Vos premières constructions s'écraseront probablement plus souvent, donc la résilience est importante.
Un processeur F4 est suffisant pour apprendre. Bien que le F7 offre plus de fonctionnalités, une carte F4 fournira tout ce dont un débutant a besoin à un coût inférieur.
Les fonctionnalités de protection comme le revêtement conforme et une conception robuste aident à survivre aux crashs. Je recommande toujours aux débutants d'appliquer un revêtement conforme supplémentaire à leurs contrôleurs de vol - c'est une assurance bon marché contre les courts-circuits accidentels.
Une bonne documentation et des ressources de support facilitent la courbe d'apprentissage. Certains fabricants fournissent une bien meilleure documentation que d'autres, ce qui fait une grande différence lorsque vous apprenez.
Le firmware Betaflight avec de bons paramètres par défaut permet de réussir sans réglage approfondi. Les paramètres par défaut se sont considérablement améliorés ces dernières années, permettant aux débutants d'obtenir plus facilement de bonnes performances de vol.
Les options abordables offrent une bonne valeur sans fonctionnalités excessives. Il n'est pas nécessaire de dépenser plus pour des fonctionnalités que vous n'utiliserez pas pendant l'apprentissage.
Les contrôleurs de vol que je recommande souvent aux débutants incluent le iFlight SucceX-E F4, le Matek F405-STD et le JHEMCU GHF411.
Installation et configuration du contrôleur de vol
Une installation et une configuration appropriées sont cruciales pour des performances optimales. J'ai fait toutes les erreurs possibles dans ce domaine, donc j'ai appris ce qui fonctionne et ce qui ne fonctionne pas.
Installation matérielle
Considérations de montage
L'orientation de votre contrôleur de vol est essentielle - la flèche doit pointer vers l'avant, ou vous pouvez configurer une orientation différente dans le logiciel. J'ai appris à vérifier cela deux fois avant chaque vol inaugural, car c'est une erreur facile à faire.
L'isolation des vibrations par un montage souple avec des œillets ou du ruban adhésif en mousse fait une différence significative dans les performances de vol. J'utilise maintenant un montage souple sur toutes mes constructions - l'amélioration des données gyroscopiques est remarquable.
Pour des informations plus détaillées sur l'isolation des vibrations, voir :
Amortissement des vibrations des drones
L'emplacement doit être au centre de gravité et protégé des crashs. J'essaie de positionner le contrôleur de vol au centre du châssis, à la fois pour l'équilibre et pour fournir une protection maximale.
L'accès au port USB est important pour la configuration et les mises à jour. J'ai construit des quadricoptères où je devais partiellement les démonter pour connecter l'USB - une erreur que je ne répéterai pas.
Un flux d'air adéquat pour refroidir les composants électroniques évite les problèmes de surchauffe. Les contrôleurs de vol peuvent devenir assez chauds, surtout lorsqu'ils sont emballés près des ESC et des émetteurs vidéo.
Meilleures pratiques de câblage
Un routage propre des fils loin des composants sensibles réduit les interférences. J'ai constaté que le fait de garder les fils de signal éloignés des fils d'alimentation fait une différence notable dans les performances.
Des connexions sécurisées par une soudure appropriée ou des connecteurs de qualité évitent les défaillances. J'ai eu trop de crashs causés par de mauvaises connexions pour prendre des raccourcis ici désormais.
Le soulagement des contraintes évite la tension sur les joints de soudure et les connecteurs. Un petit serre-câble ou une goutte de colle chaude peut vous éviter des problèmes intermittents frustrants.
La séparation des fils de signal des fils d'alimentation réduit le bruit. J'essaie toujours d'acheminer les fils de signal du côté opposé de la pile par rapport aux fils d'alimentation.
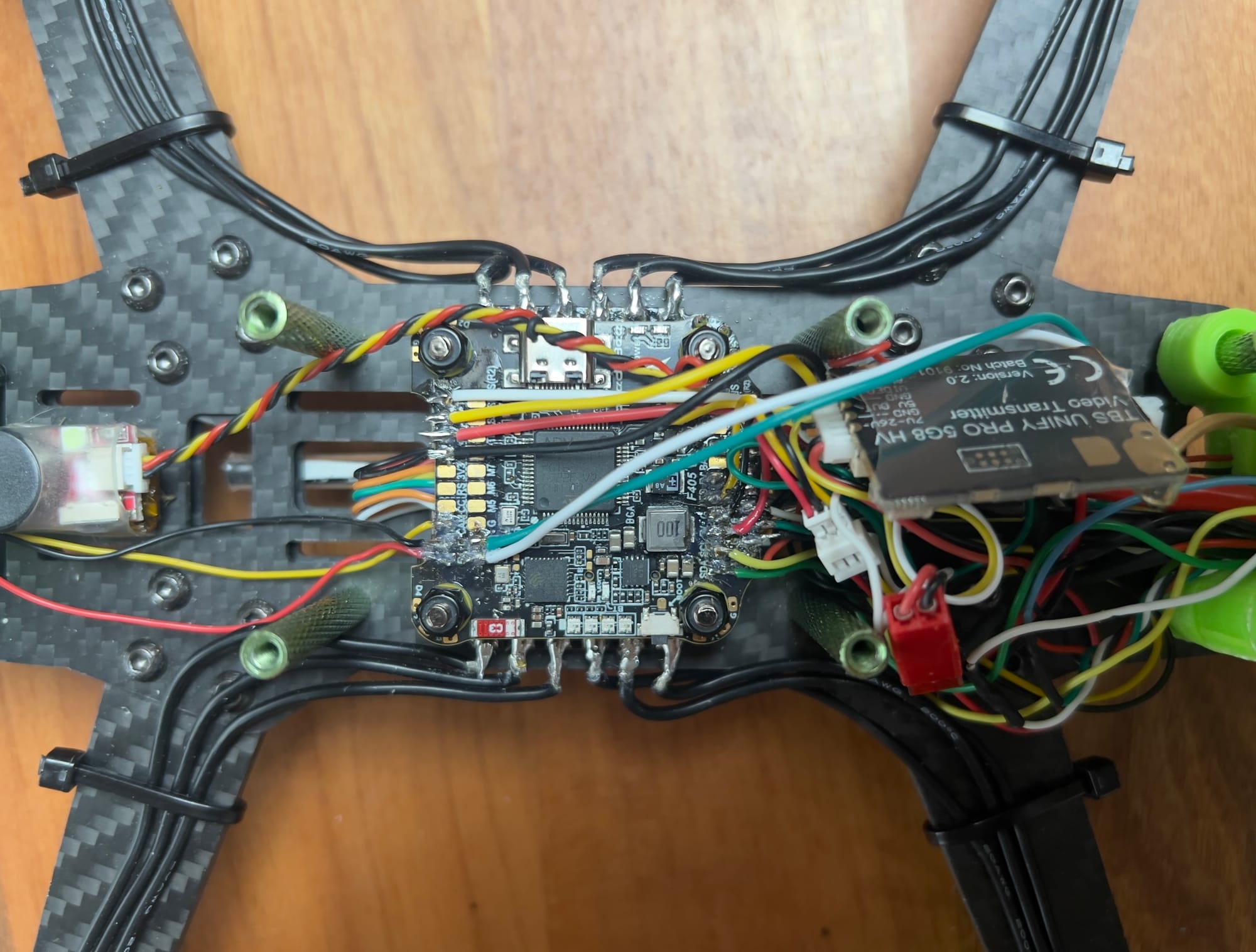
Minimiser la longueur des fils réduit le bruit et le poids. Je coupe tous les fils à la longueur exacte nécessaire - pas de boucles ou de mou supplémentaires.
Pour des informations plus détaillées sur le câblage, voir :
Guide de câblage des drones
Configuration logicielle
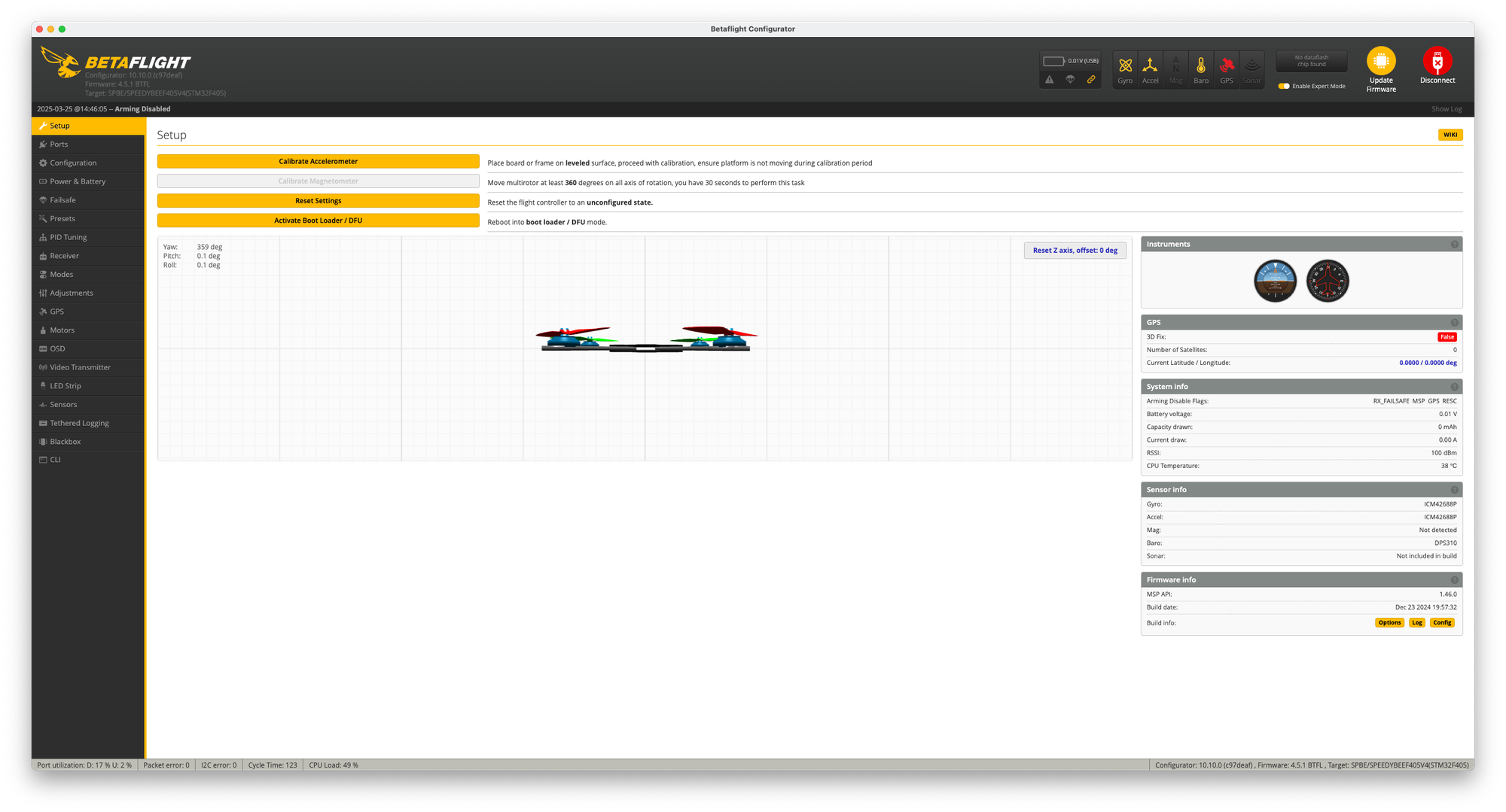
Processus de configuration initiale
Le processus de configuration suit une séquence logique que j'ai affinée au fil de nombreuses constructions :
- Installer le logiciel de configuration : Je garde des versions séparées pour différentes branches de firmware afin d'éviter les problèmes de compatibilité.
- Connecter le contrôleur de vol : Utiliser un câble USB de qualité qui prend en charge le transfert de données. J'ai résolu de nombreux problèmes de connexion mystérieux avec des câbles USB bon marché ou endommagés.
- Flasher le firmware : Mettre à jour vers la dernière version stable. J'évite généralement les versions bleeding-edge pour les constructions dont je dépends - la stabilité est plus importante que les nouvelles fonctionnalités.
- Configuration de base :
• Définir l'orientation correcte de la carte
• Configurer les UART pour les périphériques
• Configurer le protocole du récepteur
• Configurer la surveillance de la batterie - Configuration du récepteur :
• Lier le récepteur à l'émetteur
• Vérifier le mappage des canaux
• Configurer le comportement du failsafe (je teste toujours cela avant le premier vol - cela m'a sauvé des flyaways plus d'une fois) - Configuration des moteurs :
• Vérifier le sens de rotation des moteurs (toujours avec les hélices retirées !)
• Configurer le protocole ESC (DShot600 est ma recommandation pour la plupart des constructions)
• Vérifier l'absence de bruit ou de vibrations inhabituels - Configuration des modes de vol :
• Configurer l'interrupteur d'armement
• Configurer des modes de vol supplémentaires
• J'utilise une disposition d'interrupteurs cohérente sur tous mes modèles pour éviter toute confusion - Configuration de l'OSD :
• Personnaliser les éléments d'affichage à l'écran
• Positionner les éléments pour une bonne visibilité
• Configurer les avertissements et les alarmes - Réglage des PID :
• Commencer avec les valeurs par défaut ou les préréglages
• Affiner si nécessaire après les premiers vols
Problèmes de configuration courants et solutions
Au fil des années, j'ai rencontré et résolu d'innombrables problèmes de configuration. Voici quelques-uns des problèmes les plus courants et leurs solutions :
Pas de connexion au configurateur
Lorsque votre contrôleur de vol ne se connecte pas au configurateur, cela peut être incroyablement frustrant. J'ai trouvé plusieurs causes potentielles :
• Pilotes incorrects/manquants : Souvent le coupable. J'ai appris à garder une collection de pilotes pour différents contrôleurs de vol, car Windows en particulier peut être capricieux.
• Ports/câbles USB endommagés : Provoquent des problèmes de connexion mystérieux. J'utilise maintenant des câbles USB de haute qualité et j'ai un câble dédié "réputé bon" pour le dépannage.
• Problèmes de mode bootloader : Parfois, le contrôleur de vol reste bloqué en mode bootloader. J'ai développé une routine consistant à court-circuiter les broches de démarrage et à redémarrer pour le forcer dans le mode correct.
• Port COM incorrect : Une erreur simple qui est facile à faire. Je vérifie toujours le gestionnaire de périphériques pour confirmer quel port utilise le contrôleur de vol.
Moteurs tournant dans le mauvais sens
Avoir des moteurs qui tournent dans le mauvais sens est un problème courant avec des solutions simples :
• Permuter les fils du moteur : Vous pouvez permuter deux fils de moteur pour inverser le sens. Je l'ai fait d'innombrables fois, bien que cela nécessite une nouvelle soudure.
• Configuration BLHeli : Utiliser le configurateur BLHeli pour inverser le sens du moteur est plus facile si vous utilisez des ESC BLHeli. C'est ma méthode préférée car elle ne nécessite aucune modification matérielle.
• Vérification avant le vol : Toujours vérifier l'ordre et le sens des moteurs dans le configurateur avant le premier vol. J'ai crashé plus d'un quad en sautant cette étape.
Comportement de vol instable
Lorsque votre quad ne vole pas correctement, il y a plusieurs causes potentielles :
• Orientation incorrecte du contrôleur de vol : Un coupable courant. J'ai passé des heures à dépanner un comportement erratique pour réaliser que j'avais le contrôleur de vol tourné de 90 degrés par rapport à ce qui était configuré dans le logiciel.
• Problèmes de vibrations : Peuvent provoquer toutes sortes de comportements étranges. Je suis devenu un fervent défenseur d'une bonne isolation des vibrations après avoir vu la différence spectaculaire qu'elle apporte aux performances de vol.
• Problèmes de réglage des PID : Se manifestent souvent par des oscillations ou une réponse molle. En cas de doute, je réinitialise les PID par défaut et je recommence à zéro.
• Bruit gyroscopique : Peut provoquer un comportement saccadé et imprévisible. J'ai constaté que des paramètres de filtrage appropriés et une bonne isolation matérielle font une différence significative.
Récepteur non détecté
Lorsque votre récepteur ne communique pas avec votre contrôleur de vol, vérifiez ces problèmes courants :
• Affectation UART incorrecte : Le problème le plus fréquent. Je vérifie toujours à quel UART le récepteur est connecté et je m'assure qu'il est correctement configuré dans l'onglet Ports.
• Mauvais protocole de récepteur : Une autre erreur courante. Le protocole dans l'onglet Configuration doit correspondre à votre type de récepteur.
• Problèmes de liaison : Peuvent causer des défaillances de communication. J'ai appris à suivre attentivement la procédure de liaison pour chaque type de récepteur.
• Problèmes de câblage : En particulier avec les connexions de signal et de masse, peuvent empêcher la communication. Je vérifie toujours la continuité avec un multimètre si je suspecte des problèmes de câblage.
Sujets avancés sur les contrôleurs de vol
Pour les pilotes expérimentés cherchant à optimiser leurs configurations, ces concepts avancés fournissent des informations plus approfondies. J'ai passé des années à explorer ces domaines pour tirer le meilleur parti de mes constructions.
Réglage et filtrage PID
Le cœur de la performance du contrôleur de vol réside dans le réglage et le filtrage PID. C'est là que l'art rencontre la science dans le monde FPV.
Bases des PID
Comprendre le contrôleur PID est fondamental pour un bon réglage :
P (Proportionnel) fournit une correction immédiate à l'erreur. Je considère cela comme la "force" de la correction. Trop élevé, et vous obtenez des oscillations ; trop faible, et le quad semble mou.
I (Intégral) accumule l'erreur au fil du temps. Cela aide à surmonter les forces persistantes comme le vent ou une construction déséquilibrée. J'ai constaté que le terme I est souvent surutilisé par les débutants - un peu va un long chemin.
D (Dérivé) répond au taux de changement d'erreur. Cela amortit les corrections du terme P et empêche les dépassements. Obtenir le bon terme D est crucial pour un vol en douceur - trop bas et vous obtenez des virages saccadés, trop haut et vous obtenez des moteurs chauds.
Filtrage avancé
Un filtrage approprié fait une énorme différence dans les performances de vol :
Le filtrage gyroscopique élimine le bruit avant qu'il n'atteigne le contrôleur PID. J'ai appris que des données gyroscopiques plus propres conduisent à de meilleures performances de vol et à des moteurs plus froids.
Le filtrage du terme D est spécifique au terme dérivé, qui est particulièrement sensible au bruit. J'y accorde une attention particulière, car un bruit excessif du terme D conduit rapidement à des moteurs chauds.
Le filtrage dynamique à encoche cible automatiquement les fréquences de bruit du moteur. Cela a été un changement de jeu pour moi - il s'adapte à différents niveaux de gaz et réduit considérablement le bruit sans ajouter de latence.
Le filtrage RPM utilise la télémétrie ESC pour un ciblage précis du bruit. Lorsque j'ai activé cela pour la première fois sur une construction problématique, la différence était le jour et la nuit - soudainement le quad était d'une douceur extrême sans moteurs chauds.
Les filtres statiques ciblent les sources de bruit connues à des fréquences fixes. Je les utilise avec parcimonie, car ils ajoutent de la latence, mais ils sont précieux pour résoudre des problèmes de bruit spécifiques.
Approche de réglage des filtres
Mon approche du réglage des filtres a évolué au fil du temps :
Je commence par les valeurs par défaut ou les préréglages, qui se sont considérablement améliorés dans les versions récentes de Betaflight. Souvent, ceux-ci sont suffisants pour un vol occasionnel.
Pour des performances sérieuses, j'analyse les logs de la boîte noire pour identifier les caractéristiques du bruit. Cela révèle des fréquences spécifiques qui nécessitent un ciblage.
J'ajuste les filtres pour cibler un bruit spécifique tout en maintenant la réactivité. C'est un équilibre délicat - trop de filtrage ajoute de la latence, trop peu laisse du bruit.
Les tests par incréments avec de petits changements sont cruciaux. Je fais un changement à la fois et teste minutieusement avant de passer à autre chose.
La clé est d'équilibrer le filtrage par rapport à la latence et à la réactivité. Un filtrage parfait avec trop de latence semble pire qu'un peu de bruit avec une réponse nette.
Journalisation et analyse de la boîte noire
L'enregistrement des données de vol a transformé ma façon d'aborder le réglage et le dépannage :
Configuration de la boîte noire
Les options de stockage incluent la mémoire flash embarquée et la carte SD. Je préfère les cartes SD pour les travaux de réglage sérieux, car elles offrent une capacité beaucoup plus importante.
Les taux de journalisation équilibrent les détails et la durée. Pour le réglage initial, j'utilise des taux élevés pour capturer les problèmes subtils ; pour les vols plus longs, je réduis le taux.
La sélection des paramètres pertinents à enregistrer aide à gérer la taille des fichiers. Je me concentre sur les données gyroscopiques, les valeurs PID et les sorties moteur pour la plupart des travaux de réglage.
Analyse des logs
INAV et Betaflight ont leurs propres outils pour l'exploration des logs de la boîte noire. J'ai passé d'innombrables heures à regarder ces graphiques, apprenant à interpréter les schémas.

PIDtoolbox est un autre outil puissant pour une analyse approfondie de vos logs de contrôleur de vol.
Les métriques clés que je recherche incluent la trace gyroscopique (pour le bruit), la réponse PID (pour le réglage) et les sorties moteur (pour la marge). Les relations entre celles-ci racontent la véritable histoire de la performance de votre quad.
L'identification des problèmes devient plus facile avec l'expérience. J'ai appris à reconnaître les signatures de divers problèmes - le bruit a un aspect différent des problèmes PID, qui ont un aspect différent des problèmes mécaniques.
Utilisation des logs pour le réglage
L'analyse du bruit aide à identifier les fréquences nécessitant un filtrage. Je recherche des pics dans le tracé FFT qui correspondent aux fréquences du moteur ou à leurs harmoniques.
La réponse à l'échelon montre la rapidité avec laquelle l'appareil réagit aux entrées. Je veux voir une réponse rapide sans dépassement excessif.
L'évaluation du terme P révèle des oscillations ou de la lenteur. Une bonne réponse du terme P montre une correction rapide sans continuer à rebondir d'avant en arrière.
Le bruit du terme D est une cause fréquente de moteurs chauds. Je recherche un bruit amplifié dans le terme D qui correspond à des pics de sortie moteur.
La marge de manœuvre du moteur garantit que les moteurs ne sont pas au maximum. Je veux voir au moins 20% de marge sur les sorties moteur lors de manœuvres agressives.
Interface de ligne de commande Betaflight et configuration avancée
L'interface de ligne de commande offre des options de configuration puissantes qui ne sont pas disponibles dans l'interface graphique :
Commandes CLI essentielles
diff all affiche tous les paramètres qui diffèrent des valeurs par défaut. C'est ma commande de prédilection pour vérifier ma configuration et partager les paramètres avec d'autres.
dump affiche tous les paramètres actuels, y compris les valeurs par défaut. Ceci est utile pour comprendre la configuration complète.
get [parameter] affiche les valeurs de paramètres spécifiques. J'utilise ceci pour vérifier des paramètres individuels sans parcourir toute la configuration.
set [parameter]=[value] modifie les valeurs des paramètres. Cela permet un contrôle précis de chaque aspect du contrôleur de vol.
save enregistre la configuration actuelle en mémoire. J'ai appris à mes dépens à utiliser ceci après avoir fait des changements - oublier signifie perdre tout votre travail.
resource affiche l'allocation des ressources pour les broches et les périphériques. Ceci est essentiel pour la configuration avancée et le dépannage.
resource [resource_type] [index] [pin] réassigne les ressources à différentes broches. J'ai utilisé ceci pour libérer des broches pour des fonctions spécifiques ou contourner des problèmes matériels.
status affiche les informations d'état du système. Ceci est utile pour vérifier quelles fonctionnalités sont actives et comment le système est configuré.
Remappage des ressources
La réaffectation des broches pour différentes fonctions est une capacité puissante :
Les sorties moteur peuvent être déplacées vers différentes broches. J'ai utilisé ceci pour contourner des plages endommagées sur les contrôleurs de vol.
La réaffectation UART permet de déplacer les ports série vers différentes broches. Cela m'a sauvé lorsque les broches UART par défaut étaient endommagées ou nécessaires pour une autre fonction.
Le contrôle des LED peut être configuré pour différentes broches. J'ai utilisé ceci pour ajouter des bandes LED à des constructions où la broche LED par défaut n'était pas disponible.
Les fonctions spéciales comme le contrôle de la caméra et les sorties du buzzer peuvent être réaffectées. Cette flexibilité m'a permis d'ajouter des fonctionnalités à des constructions qui ne les supporteraient pas autrement.
Configurations de mixage personnalisées
Pour les dispositions de moteurs non standard, les mixeurs personnalisés sont essentiels :
Les mixages de moteurs personnalisés ajustent l'influence du moteur sur chaque axe. J'ai utilisé ceci pour des constructions inhabituelles comme des cadres asymétriques ou des supports de caméra lourds.
Les configurations spécialisées comme les tricoptères et les queues en V nécessitent un mixage personnalisé. Le mixeur par défaut fonctionne pour les quads standard, mais tout ce qui est inhabituel nécessite une personnalisation.
La linéarisation de la poussée améliore la réponse des gaz en compensant les caractéristiques non linéaires du moteur. Cela rend les gaz plus cohérents sur toute la plage.
Compilation et personnalisation du firmware
La construction d'un firmware personnalisé permet des optimisations spécifiques :
Pourquoi compiler un firmware personnalisé
L'activation des fonctionnalités expérimentales donne accès à des capacités de pointe. J'ai compilé un firmware personnalisé pour tester de nouvelles fonctionnalités avant leur sortie officielle.
L'optimisation pour un matériel spécifique peut améliorer les performances. La suppression des composants inutiles libère de la puissance de traitement pour ce qui compte.
La personnalisation des valeurs par défaut définit votre point de départ préféré. Je maintiens une version personnalisée avec mes paramètres préférés intégrés.
La correction des bogues nécessite parfois d'implémenter des correctifs avant les versions officielles. J'ai compilé un firmware personnalisé pour résoudre des problèmes spécifiques qui affectaient mes constructions.
Processus de compilation
La mise en place de l'environnement de développement nécessite Git, une chaîne d'outils et d'autres dépendances. Je maintiens une machine virtuelle de développement dédiée à cet effet.
Le clonage du dépôt vous donne le code source avec lequel travailler. Je vérifie toujours la branche ou le tag spécifique à partir duquel je veux construire.
La configuration de la construction implique la sélection de la cible et des fonctionnalités. C'est là que vous pouvez personnaliser ce qui est inclus dans votre firmware.
La compilation construit le firmware à partir du code source. Les ordinateurs modernes rendent ce processus assez rapide.
Le flashage télécharge le firmware compilé sur votre contrôleur de vol. Je fais toujours une sauvegarde du firmware d'origine avant de flasher des versions personnalisées.
Personnalisations courantes
Les modifications de cible permettent des ajustements spécifiques au matériel. J'ai modifié des cibles pour mieux correspondre au matériel spécifique que j'utilise.
Les bascules de fonctionnalités activent ou désactivent des capacités spécifiques. La suppression des fonctionnalités que vous n'utilisez pas libère des ressources pour ce qui compte.
Les modifications des valeurs par défaut modifient la configuration de départ. Je définis mes valeurs par défaut préférées pour les PID, les taux et d'autres paramètres.
Les optimisations de performances s'ajustent à des cas d'utilisation spécifiques. Les constructions de course bénéficient d'optimisations différentes de celles des constructions longue portée.
Dépannage des problèmes de contrôleur de vol
Même les meilleurs contrôleurs de vol peuvent développer des problèmes. Voici comment je diagnostique et résous les problèmes courants :
Dépannage matériel
Problèmes d'alimentation
Lorsque votre FC ne s'allume pas ou subit des redémarrages aléatoires, vérifiez ces causes courantes :
La sortie du régulateur de tension doit être propre et stable. J'utilise un multimètre pour vérifier la tension appropriée aux points de test.
La connexion de la batterie et la tension doivent être dans la plage de fonctionnement du FC. J'ai endommagé des contrôleurs de vol en connectant des batteries de tension plus élevée que ce pour quoi ils étaient conçus.
L'ajout ou le remplacement de condensateurs de filtrage peut résoudre de nombreux problèmes liés à l'alimentation. J'ajoute un condensateur à faible ESR à presque toutes les constructions comme une assurance bon marché contre les problèmes d'alimentation.
Les courts-circuits peuvent causer des problèmes d'alimentation mystérieux. J'utilise un multimètre en mode continuité pour vérifier les courts-circuits entre l'alimentation et la masse.
Une capacité d'alimentation adéquate est essentielle, en particulier pour les constructions avec de nombreux périphériques. J'ai vu des problèmes où le FC s'allumait bien tout seul mais échouait lorsque tous les composants étaient connectés.
Problèmes de capteurs
Lorsque les capteurs fournissent des lectures erratiques ou une mauvaise stabilisation :
Le recalibrage des capteurs résout souvent les problèmes mineurs. Je m'assure que le quad est parfaitement de niveau lors de l'étalonnage de l'accéléromètre.
Les dommages physiques peuvent affecter les performances des capteurs. J'ai dû remplacer des contrôleurs de vol après que des crashs violents aient endommagé le gyroscope.
L'amélioration de l'isolation des vibrations fait une différence significative dans les performances des capteurs. J'utilise maintenant un montage souple sur toutes mes constructions.
Les mises à jour du firmware résolvent parfois les problèmes de capteurs. J'ai vu des bogues dans des versions spécifiques du firmware qui affectaient les lectures des capteurs.
Si les capteurs sont endommagés au-delà de toute réparation, le remplacement du contrôleur de vol est la seule option. Je garde des contrôleurs de vol de rechange pour mes constructions principales pour cette raison.
Échecs de connexion
Lorsque les périphériques ne sont pas détectés ou que la communication est intermittente :
La vérification du câblage et des connexions est la première étape. J'utilise une loupe pour inspecter les petites soudures et connexions.
La vérification des configurations UART garantit que les bons protocoles sont activés sur les bons ports. J'ai passé des heures à dépanner pour finalement découvrir que j'avais activé la mauvaise fonctionnalité sur un UART.
Les tests avec différents câbles peuvent identifier des problèmes de connexion. Je garde des câbles USB reconnus comme bons spécifiquement pour le dépannage.
Les broches ou les joints de soudure endommagés causent souvent des problèmes intermittents. J'ai résolu de nombreux problèmes en refaisant des joints de soudure qui semblaient corrects à l'œil nu.
Les niveaux de signal et les protocoles doivent correspondre entre les appareils. J'ai eu des problèmes où des appareils 3,3V et 5V ne communiquaient pas correctement en raison d'une incompatibilité de tension.
Dépannage logiciel
Problèmes de firmware
Lorsque le firmware plante, se fige ou se comporte de manière inattendue :
La mise à jour vers le dernier firmware stable résout souvent les problèmes connus. J'évite généralement les versions bleeding-edge pour les builds dont je dépends.
Essayer différentes versions de firmware peut contourner des bugs spécifiques. J'ai dû rétrograder le firmware pour éviter des problèmes qui affectaient ma configuration particulière.
Réinitialiser aux valeurs par défaut et reconfigurer à partir de zéro résout parfois des problèmes mystérieux. C'est souvent plus rapide que d'essayer de trouver un réglage problématique spécifique.
Reflasher avec un effacement complet de la puce efface tous les paramètres ou la mémoire corrompus. J'utilise cela en dernier recours lorsque les autres dépannages échouent.
Des problèmes de compatibilité matérielle peuvent provoquer un comportement inattendu. Je vérifie la liste des cibles prises en charge avant de mettre à jour le firmware.
Problèmes de configuration
Lorsque votre quad ne répond pas correctement aux entrées ou que les fonctionnalités ne s'activent pas :
La vérification de tous les paramètres de configuration est fastidieuse mais efficace. Je passe en revue chaque onglet du configurateur de manière méthodique.
Réinitialiser aux valeurs par défaut et reconfigurer résout souvent les problèmes de paramètres en conflit. Parfois, c'est plus rapide que d'essayer de trouver le problème spécifique.
Vérifier les affectations des interrupteurs de mode garantit qu'ils s'activent comme prévu. J'utilise l'onglet du récepteur pour vérifier que les positions des interrupteurs sont correctement reconnues.
La vérification du mappage des canaux du récepteur est cruciale pour un contrôle correct. J'ai eu des problèmes où les canaux étaient mappés de manière incorrecte, provoquant un comportement étrange.
Exporter et examiner la configuration peut aider à identifier les problèmes. Je compare les configurations entre les builds fonctionnels et non fonctionnels pour repérer les différences.
Problèmes de réglage des performances
Lorsque votre quad oscille, répond mollement ou que les moteurs chauffent :
Réinitialiser les PID aux valeurs par défaut fournit un point de départ connu. Je fais cela chaque fois que j'apporte des modifications importantes à un build.
Vérifier les paramètres de filtre garantit qu'ils sont appropriés pour votre build. Trop de filtrage provoque de la latence ; trop peu laisse du bruit.
Vérifier les problèmes mécaniques comme les composants desserrés ou les hélices endommagées est essentiel. J'ai chassé des problèmes de réglage qui étaient en fait causés par un cadre fissuré.
L'analyse des logs blackbox fournit des informations sur des problèmes spécifiques. C'est l'outil de dépannage le plus puissant pour les problèmes de performance.
Appliquer les préréglages appropriés pour votre type de build résout souvent les problèmes courants. Les préréglages dans les versions récentes de Betaflight sont plutôt bons.
Quand remplacer un contrôleur de vol
Parfois, le remplacement est la seule option. Je remplace les contrôleurs de vol quand :
Des dommages physiques affectent les performances, en particulier sur des composants critiques comme le gyroscope ou le processeur. J'ai essayé de récupérer des cartes endommagées, mais cela en vaut rarement la peine.
Les capteurs sont défaillants ou devenus peu fiables. Un contrôleur de vol avec un gyroscope peu fiable est dangereux à piloter.
Des problèmes de processeur ou de mémoire provoquent une instabilité. Si votre contrôleur de vol redémarre ou se fige de manière aléatoire, il est temps de le remplacer.
La mise à niveau pour accéder à de nouvelles fonctionnalités nécessite parfois un nouveau matériel. J'ai remplacé des contrôleurs de vol parfaitement fonctionnels pour accéder à des fonctionnalités qui nécessitaient un matériel plus récent.
Après des dommages importants dus à l'eau ou à l'électricité, le remplacement est souvent plus sûr que la réparation. J'ai appris cette leçon après avoir essayé de récupérer un contrôleur de vol qui avait été mouillé - il a fonctionné pendant un certain temps, puis est tombé en panne de manière catastrophique en plein vol.
Tendances futures des contrôleurs de vol
Le paysage des contrôleurs de vol continue d'évoluer rapidement. Voici où je vois les choses aller :
Avancées matérielles
Les processeurs H7 et plus puissants deviennent la nouvelle norme. J'ai testé des contrôleurs de vol H7, et bien que les différences soient subtiles maintenant, ils offrent une marge de manœuvre pour les fonctionnalités futures.
Des capteurs améliorés avec des niveaux de bruit plus faibles amélioreront les performances de vol. Chaque génération de gyroscopes devient meilleure pour rejeter le bruit tout en maintenant la sensibilité.
L'intégration augmente, avec plus de solutions tout-en-un. La tendance vers des stacks de vol hautement intégrés se poursuivra, rendant les builds plus propres et plus simples.
La réduction de la taille se poursuit, avec des composants de plus en plus petits et légers. Je suis étonné de voir combien de fonctionnalités tiennent dans les contrôleurs de vol modernes de 16×16mm.
Les améliorations de l'efficacité énergétique offrent de meilleures performances par watt. C'est particulièrement important pour les builds longue portée et d'endurance.
Innovations logicielles
L'apprentissage automatique pour le réglage et le filtrage adaptatifs est à l'horizon. J'ai vu des expériences précoces de réglage basé sur le ML qui sont prometteuses pour optimiser automatiquement les performances.
Les fonctionnalités d'autonomie avancées s'améliorent, avec de meilleures capacités GPS et de navigation. L'écart entre les capacités des drones de loisir et professionnels se réduit.
Une configuration simplifiée avec une configuration plus intuitive rend le hobby plus accessible. La courbe d'apprentissage devient moins raide à chaque génération de firmware.
Des options de firmware spécialisées adaptées à des styles de vol spécifiques émergent. Nous voyons plus de divergence entre les firmwares de course, de freestyle et de longue portée.
Des valeurs par défaut améliorées signifient une meilleure expérience out-of-box. Les contrôleurs de vol modernes volent remarquablement bien avec les paramètres par défaut.
Technologies émergentes
La vision par ordinateur pour la navigation basée sur la caméra et l'évitement d'obstacles devient plus accessible. J'ai expérimenté des systèmes de vision de base, et ils deviennent plus pratiques pour une utilisation de loisir.
Le réseau maillé permet la communication de drone à drone. Cela ouvre des possibilités de vol coordonné et de sécurité améliorée.
La télémétrie avancée fournit des données de vol plus complètes. La quantité d'informations disponibles pour les pilotes continue d'augmenter.
L'intégration cloud pour la configuration et l'analyse des données devient plus courante. Des plateformes en ligne pour partager et analyser les données de vol émergent.
L'intégration de la simulation avec des jumeaux numériques permet de tester dans des environnements virtuels. J'ai utilisé la simulation pour tester des configurations avant de les appliquer au matériel réel.
FAQ : Questions courantes sur les contrôleurs de vol
Au fil des années, on m'a posé d'innombrables questions sur les contrôleurs de vol. Voici les plus courantes :
Quelle est la différence entre les contrôleurs de vol F4 et F7 ?
F4 et F7 font référence à la série de processeurs STM32 utilisés dans le contrôleur de vol. D'après mon expérience, les principales différences sont :
Les processeurs F7 sont plus puissants (généralement 216-400MHz contre 168-216MHz pour F4), permettant des taux de boucle plus élevés, un filtrage plus complexe et des fonctionnalités supplémentaires. Je remarque le plus la différence dans des situations exigeantes avec beaucoup de filtrage.
Les contrôleurs F7 ont généralement plus d'UART et de meilleures performances globales. C'est important lorsque vous connectez plusieurs périphériques comme le GPS, la télémétrie et le contrôle de la caméra.
Les contrôleurs F4 sont plus abordables et toujours suffisants pour la plupart des styles de vol. Beaucoup de mes builds utilisent encore des cartes F4 car elles offrent un excellent équilibre entre performances et coût.
Pour la plupart des pilotes, un F4 est parfaitement adéquat, mais si vous poussez les limites de performance ou avez besoin de connecter de nombreux périphériques, un F7 vaut la peine d'être mis à niveau.
Comment savoir si mon contrôleur de vol est endommagé ?
Les signes d'un contrôleur de vol endommagé incluent :
L'échec de la mise sous tension ou de la connexion via USB est le signe le plus évident. Si votre FC ne s'allume pas ou n'est pas reconnu par votre ordinateur, quelque chose ne va pas.
Des lectures de capteurs erratiques ou une dérive peuvent indiquer des dommages au gyroscope. J'ai vu cela après des crashs violents - le quad devient impossible à piloter en raison de mouvements aléatoires.
Des redémarrages ou des gels inattendus suggèrent des problèmes de processeur ou de mémoire. Si votre quad se désarme de manière aléatoire en plein vol, le contrôleur de vol est peut-être en train de tomber en panne.
De la fumée ou des dommages visibles aux composants sont un indicateur clair. J'ai libéré la fumée magique de plus d'un contrôleur de vol.
Une surchauffe pendant le fonctionnement peut indiquer des dommages internes ou des courts-circuits. Si votre FC devient anormalement chaud, quelque chose ne va pas.
Des erreurs persistantes dans le configurateur indiquent souvent des problèmes matériels. Si vous voyez la même erreur à plusieurs reprises malgré le reflashage du firmware, suspectez des problèmes matériels.
L'échec de l'armement ou du maintien d'un vol stable malgré une configuration correcte suggère des problèmes de capteurs. J'ai eu des contrôleurs de vol qui ont passé tous les tests sur le banc mais qui ont échoué en vol.
Quel contrôleur de vol est le meilleur pour un débutant ?
Pour les débutants, je recommande des contrôleurs de vol qui sont :
Fiables et bien pris en charge, comme l'iFlight SucceX-E F4 ou le Matek F405-STD. Ceux-ci ont résisté à l'épreuve du temps et ont de grandes communautés d'utilisateurs.
À un prix raisonnable (environ 30-40 $) pour équilibrer la qualité avec les contraintes budgétaires. Il n'est pas nécessaire de dépenser pour des fonctionnalités haut de gamme pendant l'apprentissage.
Compatibles avec Betaflight pour une configuration facile et une documentation complète. L'écosystème Betaflight dispose du plus grand nombre de ressources pour les débutants.
Bien documentés avec un bon support de la communauté pour le dépannage. Lorsque vous rencontrerez inévitablement des problèmes, avoir des ressources pour vous aider est inestimable.
Suffisamment durables pour survivre aux crashs d'apprentissage. Je recherche des cartes avec un revêtement conforme et une conception robuste.
Incluant des fonctionnalités essentielles sans complexité écrasante. Des fonctionnalités comme l'OSD et la surveillance du courant sont utiles, mais les fonctionnalités avancées peuvent attendre.
Les processeurs F4 sont généralement suffisants pour les débutants, le F7 étant une option pour ceux qui veulent plus de marge de progression. J'ai commencé avec des processeurs F1 et j'étais parfaitement heureux jusqu'à ce que j'en sache assez pour apprécier les avantages d'un matériel plus avancé.
Puis-je utiliser n'importe quel contrôleur de vol avec n'importe quel ESC ?
La plupart des contrôleurs de vol modernes peuvent fonctionner avec la plupart des ESC, mais il y a des considérations de compatibilité :
La prise en charge des protocoles est essentielle - assurez-vous que le FC et les ESC prennent en charge les mêmes protocoles (DShot, Multishot, etc.). Je préfère DShot600 pour la plupart des constructions, car il offre un bon équilibre entre performance et fiabilité.
La compatibilité de tension est importante - vérifiez que le FC peut gérer la tension fournie par les ESC/PDB. J'ai endommagé des contrôleurs de vol en les connectant à des tensions plus élevées que celles pour lesquelles ils étaient prévus.
Les connexions physiques varient entre les fils individuels et les câbles plats. Assurez-vous que votre FC et vos ESC ont des méthodes de connexion compatibles.
Pour les piles FC/ESC, assurez-vous qu'elles sont conçues pour fonctionner ensemble. Bien que le mélange et l'appariement soient possibles, les piles conçues comme une unité offrent généralement une meilleure intégration.
En général, tout FC de qualité peut fonctionner avec n'importe quel ESC de qualité s'il est correctement configuré, mais l'appariement des composants offre souvent la meilleure expérience. Je préfère utiliser des composants du même fabricant lorsque c'est possible, car ils sont conçus pour fonctionner ensemble.
À quelle fréquence dois-je mettre à jour le firmware de mon contrôleur de vol ?
Il n'y a pas de calendrier fixe pour les mises à jour du firmware, mais je suis ces directives :
Si tout fonctionne bien, ne vous sentez pas obligé de mettre à jour immédiatement. Le vieux dicton "si ça marche, ne le répare pas" s'applique ici.
Mettez à jour pour les nouvelles fonctionnalités lorsqu'une version contient des capacités que vous voulez. J'ai mis à jour vers Betaflight 4.3 spécifiquement pour le filtrage RPM amélioré.
Mettez à jour pour les corrections de bogues si vous rencontrez des problèmes traités dans une nouvelle version. Je vérifie les notes de version pour voir si elles traitent des problèmes que je rencontre.
Pour les versions majeures, j'attends quelques semaines après la sortie pour avoir les commentaires de la communauté. Laissez les autres trouver les bogues en premier.
Évitez de mettre à jour juste avant des courses ou des voyages importants. J'ai appris cette leçon à mes dépens - une mise à jour de dernière minute peut introduire des problèmes inattendus.
Sauvegardez toujours votre configuration avant de mettre à jour, et soyez prêt à passer du temps à reconfigurer après des mises à jour importantes. Je garde des notes sur mes paramètres spécifiques pour chaque quad pour faciliter ce processus.
Qu'est-ce qui cause le bruit du gyroscope du contrôleur de vol ?
Le bruit du gyroscope peut provenir de plusieurs sources :
Les vibrations mécaniques des moteurs, des hélices ou de la résonance du cadre sont la cause la plus fréquente. J'ai constaté qu'un bon équilibrage des hélices et des moteurs fait une grande différence.
Le bruit électrique des ESC, des systèmes d'alimentation ou du câblage peut affecter les lectures du gyroscope. Garder les fils de signal éloignés des fils d'alimentation permet de réduire ce phénomène.
Les limitations des capteurs créent un plancher de bruit inhérent. Différents modèles de gyroscope ont des caractéristiques de bruit différentes.
Les problèmes de montage comme une mauvaise isolation ou un montage rigide transmettent les vibrations directement au gyroscope. J'utilise maintenant un montage souple sur toutes mes constructions.
Des composants endommagés peuvent provoquer une augmentation du bruit. Un gyroscope qui a été soumis à des crashs violents peut développer des niveaux de bruit plus élevés.
La réduction du bruit implique généralement une meilleure isolation des vibrations, un câblage amélioré, des composants de qualité et des paramètres de filtrage appropriés. Je m'attaque d'abord aux problèmes mécaniques, puis j'utilise le filtrage logiciel pour gérer le bruit restant.
Puis-je transférer les paramètres entre les contrôleurs de vol ?
Oui, mais avec des limitations :
Le transfert des paramètres fonctionne mieux entre le même type de firmware (par exemple, de Betaflight à Betaflight). J'ai eu des résultats mitigés en essayant de transférer des paramètres entre différents types de firmware.
Un matériel similaire donne de meilleurs résultats lors du transfert des paramètres. Le passage d'une carte F4 à une autre carte F4 similaire fonctionne généralement bien.
L'utilisation de la commande diff all pour sauvegarder les paramètres est la méthode la plus fiable. Je sauvegarde cette sortie dans un fichier texte pour chacune de mes constructions.
Les fonctionnalités de sauvegarde du configurateur fonctionnent bien pour un matériel identique. C'est pratique mais moins flexible que les commandes CLI.
Certains paramètres nécessitent toujours un ajustement manuel pour un nouveau matériel. Les mappages de ressources, en particulier, sont spécifiques au matériel et ne se transfèrent pas bien.
Vérifiez toujours soigneusement les paramètres transférés, car des configurations incorrectes peuvent provoquer un comportement inattendu ou des crashs. Je passe en revue chaque onglet du configurateur après avoir transféré les paramètres pour vérifier que tout semble correct.
Quelle est la différence entre le filtrage matériel et logiciel du gyroscope ?
La distinction est importante pour comprendre comment optimiser les performances :
Le filtrage matériel est implémenté dans le capteur gyroscopique lui-même, fournissant une réduction initiale du bruit avant que le signal n'atteigne le processeur. Cela varie selon les modèles de gyroscope et ne peut pas être ajusté dans le firmware.
Le filtrage logiciel est implémenté dans le firmware du contrôleur de vol et est personnalisable par la configuration. Cela inclut les filtres notch dynamiques, les filtres passe-bas et le filtrage basé sur le RPM.
Les contrôleurs de vol modernes utilisent une combinaison des deux approches. Je m'appuie sur le filtrage matériel comme première ligne de défense, puis j'utilise le filtrage logiciel pour traiter les caractéristiques spécifiques du bruit de ma configuration.
L'avantage du filtrage logiciel est la flexibilité – il peut être ajusté pour des configurations et des styles de vol spécifiques. L'inconvénient est qu'il utilise de la puissance de traitement et peut introduire de la latence.
Conclusion
Le contrôleur de vol est véritablement le cerveau de votre drone FPV, traduisant vos intentions en un vol précis. Après des années de construction et de pilotage, j'en suis venu à apprécier à quel point ce composant est essentiel à l'expérience globale.
Comprendre la technologie des contrôleurs de vol, les critères de sélection et les options de configuration vous permet d'optimiser les performances en fonction de vos besoins et de votre style de pilotage spécifiques. Que vous construisiez votre premier drone ou votre cinquantième, choisir le bon contrôleur de vol et le configurer correctement aura un impact profond sur votre expérience de pilotage.
La technologie continue d'évoluer rapidement, avec des processeurs plus puissants, de meilleurs capteurs et des firmwares plus sophistiqués offrant des plateformes de plus en plus performantes. En maîtrisant la configuration et le réglage du contrôleur de vol, vous libérerez tout le potentiel de votre drone, obtenant l'équilibre parfait entre stabilité, réactivité et fonctionnalités pour votre style de pilotage unique.
J'ai crashé plus de drones que je ne veux l'admettre au cours de mon parcours pour comprendre ces appareils complexes, mais chaque échec m'a appris quelque chose de précieux. La satisfaction d'un quad parfaitement réglé répondant exactement comme prévu rend tout le dépannage utile. Il n'y a rien de tel que le sentiment d'un drone qui semble être une extension de vos pensées, et c'est le contrôleur de vol qui rend cela possible.


