Controladores de vuelo de drones: principios y funcionamiento
El controlador de vuelo (FC) es el cerebro de tu dron FPV, traduciendo tus entradas de control en los comandos precisos del motor necesarios para el vuelo. Procesa datos de varios sensores, ejecuta algoritmos complejos y realiza cientos de ajustes por segundo para mantener tu dron estable y receptivo. Esta guía completa explora la tecnología del controlador de vuelo, las opciones de firmware, los criterios de selección, los procedimientos de configuración y las características avanzadas para ayudarte a entender y optimizar este componente crítico.
Introducción a los Controladores de Vuelo
Después de años construyendo y volando drones FPV, he llegado a apreciar que ningún componente individual influye más en tu experiencia de vuelo que el controlador de vuelo. Todavía recuerdo mi primera construcción con una primitiva placa KK que apenas mantenía el dron estable. Avanzando hasta hoy, los sofisticados procesadores H7 en los controladores de vuelo modernos están realizando cálculos complejos que habrían parecido ciencia ficción hace solo unos pocos años.

Un controlador de vuelo es una placa de circuito especializada que contiene un microprocesador, varios sensores y conexiones de entrada/salida. Sirve como la unidad central de procesamiento de tu dron, realizando varias funciones críticas:
• Estabilización: Mantener un vuelo nivelado y compensar las fuerzas externas
• Procesamiento de Entrada de Control: Traducir los movimientos de tus sticks en comandos del motor
• Integración de Sensores: Recopilar y procesar datos de giroscopios, acelerómetros, etc.
• Gestión de Características: Manejar modos como acro, ángulo, retención GPS y más
• Comunicación Periférica: Interactuar con receptores, ESCs, cámaras y otros componentes
La Evolución de los Controladores de Vuelo
He sido testigo de la dramática evolución de los controladores de vuelo incluso desde 2019 cuando comencé mi hobby.
Todo comenzó con procesadores básicos de 8 bits que apenas podían manejar una estabilización simple. El salto a controladores de 32 bits alrededor de 2014 fue revolucionario – de repente los quads eran capaces de un control mucho más preciso y características avanzadas. La progresión ha sido notable:
• FCs Iniciales (2010-2013): Estabilización básica con características limitadas. Las construcciones con una placa MultiWii requerían atención constante solo para mantener un vuelo nivelado.
• Revolución de 32 bits (2014-2016): Procesamiento más rápido y mejores algoritmos. El Naze32 fue un cambio de juego – de repente los quads se sentían como máquinas completamente diferentes.
• Era Moderna (2017-presente): Potentes procesadores F4/F7 y componentes integrados. He descubierto que estos controladores de vuelo modernos pueden manejar filtrado complejo y altas tasas de bucle que hacen que incluso el vuelo freestyle agresivo se sienta suave como la mantequilla.
• Próxima Generación (2023+): Procesadores H7 con capacidades de aprendizaje automático y fusión de sensores mejorada. Estos son controladores de vanguardia, y la diferencia en el rendimiento de vuelo es sutil pero notable, especialmente en condiciones desafiantes.
Esta progresión ha llevado a controladores de vuelo más pequeños y capaces con características y rendimiento cada vez más sofisticados. Incluso recuerdo los tiempos en que un controlador de vuelo tenía el tamaño de una tarjeta de crédito – ahora a menudo son más pequeños que un sello postal mientras hacen mucho más.
Componentes Básicos de un Controlador de Vuelo
Los controladores de vuelo modernos integran varios componentes clave que trabajan juntos para crear la experiencia de vuelo. Permíteme guiarte a través de lo que he aprendido sobre estos componentes a lo largo de años de construcción y solución de problemas.
Microprocesador
La unidad central de computación es típicamente un procesador STM32, y el tipo hace una diferencia significativa en el rendimiento. He volado todo, desde procesadores F1 hasta H7, y esto es lo que he encontrado:
• Procesadores F1: Chips antiguos de 32 bits que ahora están obsoletos. Los volé algunas veces por diversión, y aunque cumplían su función, las limitaciones eran frustrantes.
• Procesadores F3 (72MHz): En gran parte obsoletos ahora, pero fueron un sólido paso adelante desde F1. Volé una construcción basada en F3 y fue en realidad bastante satisfactoria.
• Procesadores F4 (168-216MHz): Todavía comunes y perfectamente capaces para la mayoría de los estilos de vuelo. Todavía uso una placa F4 en una construcción educativa porque ofrecen un gran equilibrio de rendimiento y costo.
• Procesadores F7 (216-400MHz): El estándar actual, con potencia de procesamiento adicional que es notable en situaciones exigentes. Cuando cambié mi principal cuadricóptero estilo libre a un F7, inmediatamente noté el manejo mejorado de filtrado complejo y tasas de bucle más altas.
• Procesadores H7 (400-480MHz): Emergiendo como la opción de gama alta. He estado probando uno en mi construcción de carreras, y aunque las diferencias son sutiles, el margen para futuras características es significativo.
El procesador determina la potencia de cómputo del controlador de vuelo, afectando su capacidad para ejecutar algoritmos complejos y mantener altos tiempos de bucle. He aprendido que aunque el procesador no lo es todo, establece el techo de lo que tu controlador de vuelo puede lograr.
Sensores
Los sensores en un controlador de vuelo son esenciales para la estabilidad de vuelo y la implementación de características. He estrellado más de unos pocos drones debido a problemas de sensores, así que he aprendido a prestar mucha atención a este aspecto.
• Giroscopio: Mide las tasas de rotación alrededor de tres ejes (cabeceo, alabeo, guiñada). Este es el sensor más crítico, y he encontrado que la calidad del giroscopio hace una diferencia notable en el rendimiento de vuelo. Un giroscopio ruidoso lleva a un comportamiento nervioso e impredecible que ninguna cantidad de ajuste puede arreglar completamente.
• Acelerómetro: Mide la aceleración lineal y es crucial para el modo de ángulo. Rara vez uso el modo de ángulo en estos días, pero cuando dejo que un amigo intente volar uno de mis drones, estoy agradecido por un acelerómetro bien calibrado.
• Barómetro: Mide la presión atmosférica para la estimación de altitud. He encontrado que estos son irregulares en términos de confiabilidad – son afectados por el flujo de las hélices y las condiciones climáticas cambiantes. Para un control serio de altitud, prefiero GPS.
• Magnetómetro (Brújula): Determina la orientación relativa al norte magnético. En mi experiencia, estos son altamente susceptibles a interferencias de los sistemas de energía y motores. Siempre los monto lo más lejos posible de los cables de alimentación.
• GPS: Proporciona datos de posición para características de navegación. He aprendido por las malas que no todos los módulos GPS son creados iguales – gastar un poco más en un módulo con mejor recepción de satélites me ha salvado de perder drones en vuelos de largo alcance. Ver también: Tecnología GNSS para Drones
Interfaces de Entrada/Salida
Las conexiones para periféricos y otros componentes son lo que hacen versátil a un controlador de vuelo. He construido de todo, desde cuadricópteros de carreras minimalistas hasta complejas máquinas de largo alcance, y las interfaces disponibles marcan toda la diferencia.
• Puertos UART: Proporcionan comunicación serial con receptores, GPS, telemetría, etc. He encontrado que tener al menos 4-5 UARTs me da la flexibilidad que necesito para la mayoría de las construcciones. Quedarse sin UARTs es frustrante y a menudo requiere compromisos.
• Bus I2C: Permite la comunicación con ciertos periféricos y sensores. He tenido experiencias mixtas con I2C – es conveniente pero puede ser propenso a problemas de ruido si no se implementa adecuadamente.
• Bus SPI: Ofrece comunicación de alta velocidad con giroscopios y otros dispositivos. Esto es crítico para el rendimiento, y he notado que los controladores de vuelo con buses SPI bien implementados tienden a tener señales de giroscopio más limpias.
• Salidas de Motor: Se conectan a ESCs para el control del motor. La tendencia hacia los protocolos DShot ha sido un cambio de juego en mi experiencia – la precisión digital elimina muchos de los dolores de cabeza de calibración con los que solía lidiar. Ver también: Motores para Drones FPV y ESCs para Drones FPV
• Puerto USB: Se usa para configuración y actualizaciones de firmware. He aprendido a verificar la calidad de esta conexión – un puerto USB endeble es a menudo lo primero que se rompe en un controlador de vuelo.
Gestión de Energía
Los circuitos de alimentación proporcionan energía limpia y regulada, y he aprendido a no subestimar su importancia. Al principio de mi viaje en FPV, experimenté problemas misteriosos de vuelo que finalmente se remontaron a problemas de alimentación.
• Reguladores de Voltaje: Convierten el voltaje de la batería a 5V y 3.3V para la electrónica. He encontrado que los reguladores de calidad hacen una diferencia significativa en la confiabilidad general del sistema, especialmente en construcciones de alta potencia.
• Condensadores de Filtrado: Suavizan la entrega de energía y reducen el ruido. Siempre agrego condensadores adicionales a mis construcciones – es un seguro barato contra el ruido eléctrico que puede afectar las lecturas de los sensores.
• Circuitos de Protección: Previenen daños por picos de voltaje o polaridad invertida. He frito más de un controlador de vuelo al conectar una batería al revés, así que ahora busco placas con protección robusta.
Para información más detallada sobre cómo alimentar tu dron, consulta:
Resumen de Tipos de Baterías para Drones y Química
Hardware del Controlador de Vuelo
A lo largo de los años, he usado docenas de diferentes controladores de vuelo en varias construcciones, y he desarrollado algunas fuertes opiniones sobre lo que funciona mejor para diferentes aplicaciones.
Clasificaciones de Controladores de Vuelo
Por Tipo de Procesador
El procesador es la forma más común de clasificar los controladores de vuelo, y he encontrado que elegir el procesador adecuado para tus necesidades es crucial.
Controladores de Vuelo F4 (168-216MHz) ofrecen un buen equilibrio de rendimiento y costo. Uso estos en la mayoría de mis construcciones porque son suficientes para todas menos las aplicaciones más exigentes. El Betaflight F4, Matek F405 y iFlight SucceX-E F4 me han servido bien.
Controladores de Vuelo F7 (216-400MHz) proporcionan más UARTs y características. Uso estos en construcciones donde necesito conectar múltiples periféricos o quiero el mejor rendimiento de filtrado posible. El Matek F722, SpeedyBee F7 e iFlight SucceX-E F7 están entre mis favoritos.
Controladores de Vuelo H7 (400-480MHz) representan la vanguardia con la máxima capacidad de procesamiento. He estado probando el SpeedyBee H7 y Matek H743, y aunque las mejoras de rendimiento sobre F7 son sutiles, definitivamente están preparados para el futuro en cuanto a características avanzadas.
Por Factor de Forma
Los controladores de vuelo vienen en patrones de montaje estandarizados, y elegir el tamaño adecuado es crítico para tu construcción.
Montaje Estándar (30.5×30.5mm) es el tamaño más común para construcciones de 5" y más grandes. Uso estos en la mayoría de mis cuadricópteros estilo libre y de largo alcance porque ofrecen la mayoría de las características y opciones de conectividad.
Montaje de 20×20mm es común en construcciones de 3" y más pequeñas. He encontrado que estas placas más pequeñas han avanzado mucho en términos de características, aunque típicamente tendrás menos UARTs y opciones de conexión.
Montaje de 16×16mm se usa en construcciones micro y tiny whoops. Estos son increíblemente compactos, y siempre me sorprende cuánta funcionalidad pueden empacar los fabricantes en un espacio tan pequeño.
AIO (All-In-One) combina el FC con otros componentes como los ESC. He aprendido a apreciar estos para ciertas construcciones: simplifican el cableado y pueden reducir el peso, aunque son un único punto de fallo.
Por Integración de Características
Los controladores de vuelo modernos a menudo integran componentes adicionales, y he descubierto que elegir el nivel adecuado de integración puede facilitar mucho la construcción.
Solo FC las placas solo proporcionan la funcionalidad del controlador de vuelo. Todavía uso estos en la mayoría de mis construcciones donde quiero la máxima flexibilidad en la selección de componentes.
FC+PDB las combinaciones incluyen distribución de energía. Estos ahorran espacio y simplifican el cableado.
FC+ESC (4-en-1) las pilas combinan el FC con los ESC. Reducen drásticamente el tiempo de construcción y crean una configuración más limpia y confiable.
FC+ESC+VTX las soluciones todo en uno incluyen el transmisor de video. He tenido experiencias mixtas con estos: son convenientes pero pueden calentarse, y si un componente falla, estás reemplazando todo.
FC+ESC+VTX+RX las pilas de vuelo completas incluyen el receptor. Estos ofrecen la máxima integración, y aunque al principio era escéptico, algunas de las implementaciones más nuevas funcionan sorprendentemente bien.
Características Clave de Hardware a Considerar
Al seleccionar un controlador de vuelo, he aprendido a prestar atención a varias características de hardware que pueden hacer o deshacer tu experiencia de vuelo.
Recuento y Disponibilidad de UART
Los UART son puertos serie utilizados para conectar periféricos, y he descubierto que tener suficientes de ellos es crucial para la flexibilidad.
Considero que 3 UART son el mínimo absoluto (receptor, telemetría y uno de repuesto). He construido quads con solo 3 UART, pero siempre se siente limitante.
4-5 UART proporcionan una configuración cómoda para la mayoría de las construcciones. Esto me da suficientes conexiones para un receptor, telemetría, GPS y quizás control de cámara o control de LED.
6+ UART ofrece la máxima flexibilidad para configuraciones complejas. Mis construcciones de largo alcance generalmente usan esta cantidad de conexiones para varios periféricos y sistemas de respaldo.
He aprendido por las malas que no todos los UART son iguales: algunos pueden compartirse con otras funciones o tener limitaciones. Siempre revisa la documentación cuidadosamente.
Tipo de Giroscopio e Implementación
El giroscopio es fundamental para el rendimiento del vuelo, y he desarrollado fuertes preferencias basadas en años de pruebas.
La serie de giroscopios MPU6000 son confiables con un nivel de ruido más bajo. Prefiero estos para construcciones de carreras donde cada bit de rendimiento importa. Cada vez es más difícil encontrarlos en placas nuevas, pero siguen siendo mi primera opción cuando están disponibles.
Los giroscopios ICM20602/ICM20689 ofrecen un buen rendimiento y son comunes en los FC modernos. Los he encontrado perfectamente adecuados para la mayoría de los estilos de vuelo, aunque son un poco más susceptibles al ruido que el MPU6000.
El BMI270 es un sensor más nuevo con un rendimiento excelente. Me ha impresionado su manejo del ruido en mis construcciones recientes, y parece que se está convirtiendo en el nuevo estándar.
El método de montaje también importa: los giroscopios de montaje blando frente a los de montaje duro manejan la vibración de manera diferente. Prefiero los controladores de vuelo con giroscopios bien aislados, ya que se ven menos afectados por las vibraciones que son inevitables en los quads de alto rendimiento.
Clasificación del Sensor de Corriente
Para construcciones con detección de corriente integrada, elegir la clasificación adecuada es importante para una gestión precisa de la batería.
Los drones de carreras generalmente necesitan una clasificación de 30-60A. He descubierto que ir demasiado alto reduce la resolución y la precisión para estas construcciones más livianas.
Los drones de estilo libre funcionan mejor con una clasificación de 50-100A. Mis construcciones de estilo libre pueden tirar una corriente significativa durante maniobras agresivas, por lo que tener margen es importante.
Las configuraciones de largo alcance y cinematográficas generalmente necesitan una clasificación de 40-80A. Estas construcciones tienden a tener un consumo de energía más constante, por lo que la precisión es más importante que el rango extremo.
La resolución (profundidad de bits) proporciona lecturas más precisas. He descubierto que los sensores de corriente de mayor resolución marcan una diferencia notable en la precisión de mis advertencias de batería y telemetría.
Grabación de Caja Negra
Para el registro y la puesta a punto, la capacidad de caja negra es esencial, y he utilizado varios enfoques según la construcción.
La memoria flash incorporada (generalmente de 8 a 16 MB) es conveniente pero limitada en capacidad. Uso esto para sesiones de ajuste rápido, pero se llena rápidamente a altas tasas de registro.
Las ranuras para tarjetas SD proporcionan una capacidad de almacenamiento mucho mayor pero agregan complejidad. Para un trabajo de ajuste serio, prefiero los controladores de vuelo con soporte para tarjetas SD: la capacidad de registrar vuelos completos a altas velocidades es invaluable.
Algunos FC no tienen almacenamiento y requieren un registrador externo para los datos de la caja negra. Evito estos cuando es posible, ya que el registrador externo agrega peso y complejidad.
Características de Hardware Adicionales
A lo largo de los años, he llegado a apreciar varias otras características que mejoran la experiencia de vuelo.
OSD (visualización en pantalla) integrado para la transmisión FPV es algo que ahora considero esencial. Poder ver el voltaje de la batería, el tiempo de vuelo y otra información crítica mientras vuelo ha salvado a muchos de mis drones de choques o daños en la batería.
Un barómetro para mantener la altitud puede ser útil en ciertas situaciones. No uso esta función a menudo, pero al filmar imágenes cinematográficas, un control de altitud confiable es valioso.
Las salidas de control LED para tiras LED facilitan el vuelo nocturno y la identificación de drones. Me he aficionado a tener LED direccionables en mis construcciones: no son solo para mostrar, son genuinamente útiles para la orientación y la indicación de estado.
Las salidas de zumbador para localizar drones estrellados me han ahorrado horas de búsqueda. Ahora nunca construyo un quad sin un zumbador: es demasiado fácil perder de vista un dron oscuro en hierba alta o árboles.
El control de la cámara para ajustar la configuración de la cámara en pleno vuelo es un lujo que he llegado a apreciar. Poder ajustar la exposición u otros ajustes sin aterrizar es particularmente útil para cambiar las condiciones de luz.
Firmware del Controlador de Vuelo
El firmware es el software que se ejecuta en el hardware del controlador de vuelo, determinando sus capacidades y comportamiento. He probado la mayoría de las opciones disponibles, y cada una tiene sus fortalezas y debilidades.
Principales Opciones de Firmware
Hay varias opciones de firmware disponibles, y he pasado tiempo con cada una de ellas para comprender sus características únicas.
Betaflight
Betaflight es el firmware más popular para drones FPV, y es lo que uso en la mayoría de mis construcciones. Se centra en el rendimiento de carreras y estilo libre, con excelentes características de vuelo y desarrollo activo.
Las fortalezas de Betaflight incluyen su excelente rendimiento de vuelo, una comunidad de desarrollo activa y una gran base de usuarios. Cuando tengo un problema con Betaflight, generalmente puedo encontrar a alguien que ya lo ha resuelto.
Sus debilidades incluyen características autónomas limitadas y una curva de aprendizaje más pronunciada. He pasado incontables horas en el Configurador de Betaflight ajustando la configuración, lo que puede ser intimidante para los principiantes.
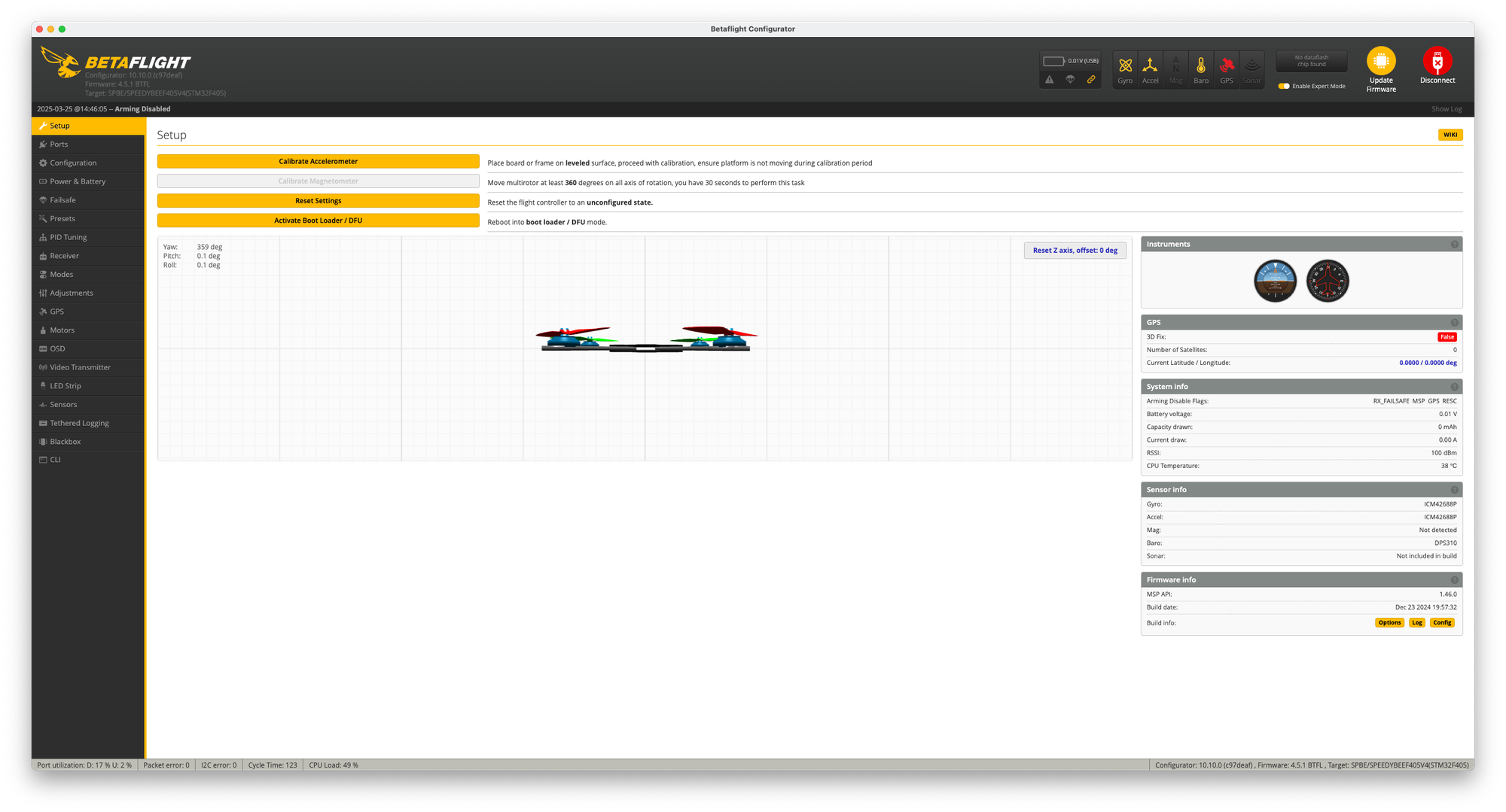
Betaflight es mejor para carreras, estilo libre y vuelo FPV en general. Si estás principalmente interesado en vuelo acrobático o carreras, es difícil superar a Betaflight.
INAV
INAV se enfoca en navegación y características autónomas, y lo uso en mis construcciones de largo alcance y mapeo. Sus modos GPS, retorno a casa y capacidades de puntos de referencia son excelentes.
Las fortalezas de INAV son sus completas características de navegación y vuelo autónomo confiable. He tenido INAV trayendo drones de vuelta desde kilómetros de distancia cuando he perdido la señal de video.
Sus debilidades incluyen estar menos optimizado para vuelo de rendimiento puro. Si bien INAV ha mejorado su rendimiento acro, todavía no iguala del todo a Betaflight para carreras o estilo libre.
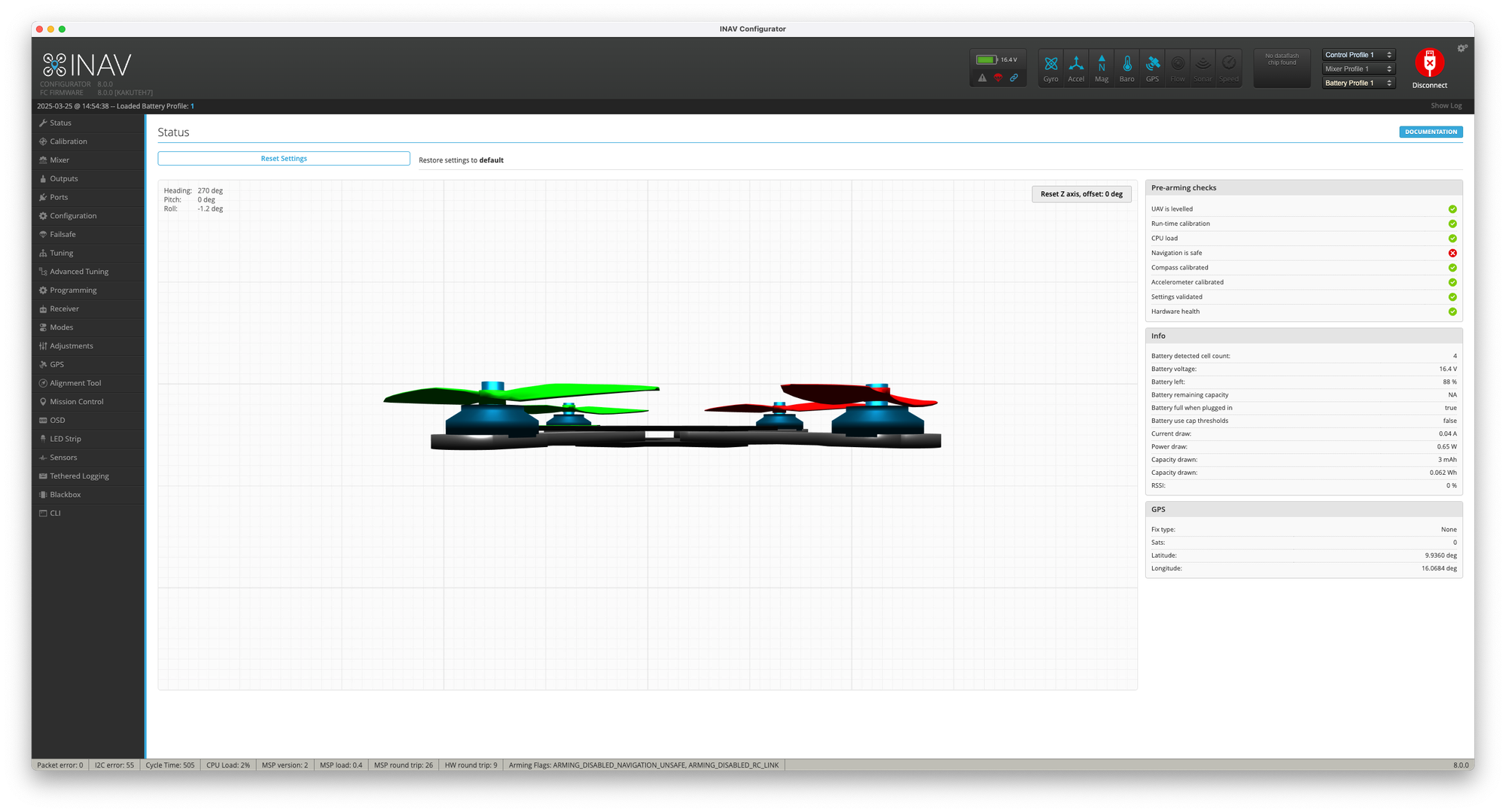
INAV es mejor para vuelo de largo alcance, mapeo y misiones autónomas. Si estás interesado en exploración en lugar de acrobacias, INAV vale la pena considerar.
KISS
KISS adopta un enfoque simplificado con énfasis en código limpio. He usado KISS en algunas construcciones, y su simplicidad es refrescante.
Las fortalezas de KISS incluyen una configuración fácil y buenas características de vuelo de fábrica. Me impresionó lo poco que se necesitaba ajustar para lograr que un quad con KISS volara bien.
Sus debilidades incluyen ser de código cerrado y tener opciones de hardware limitadas. El ecosistema es más pequeño, lo que significa menos recursos cuando surgen problemas.
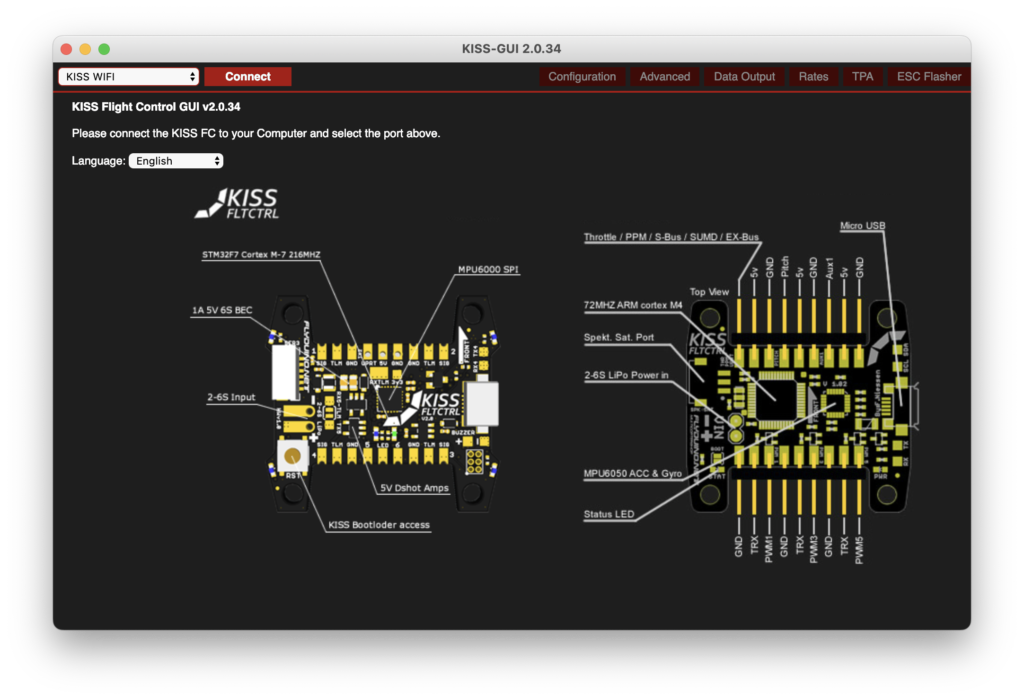
KISS es mejor para pilotos que buscan simplicidad con buen rendimiento. Si quieres pasar más tiempo volando y menos tiempo configurando, KISS vale la pena echarle un vistazo.
Emuflight
Emuflight es una bifurcación de Betaflight con enfoques alternativos para el control de vuelo. He experimentado con él en un par de construcciones, particularmente para vuelo cinematográfico.
Las fortalezas de Emuflight incluyen su sensación de vuelo única y buen rendimiento para ciertos estilos de vuelo. Lo encontré particularmente bueno para estilo libre suave y fluido.
Sus debilidades incluyen una comunidad más pequeña y actualizaciones menos frecuentes. Cuando surgen problemas, hay menos recursos disponibles en comparación con Betaflight.
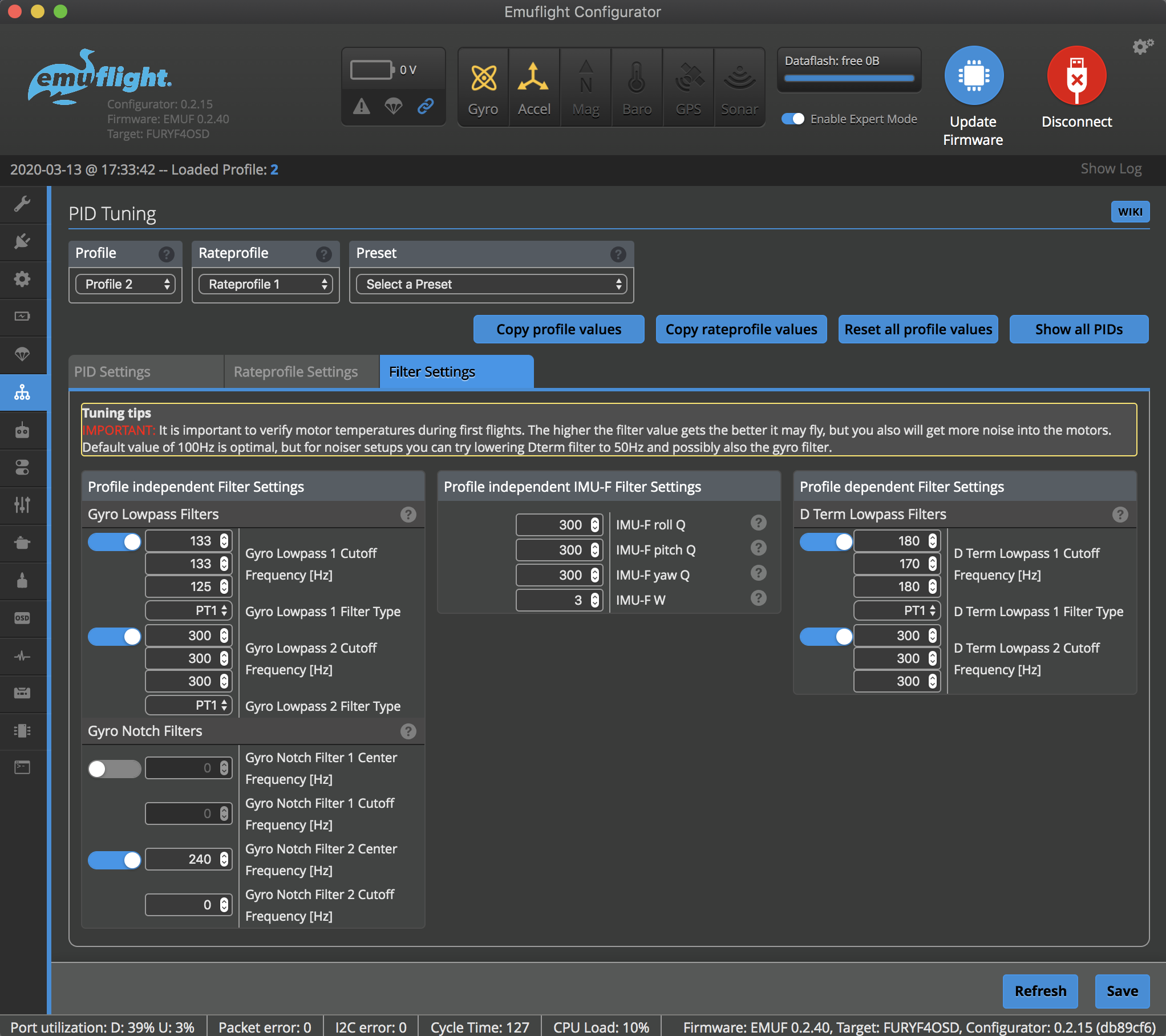
Emuflight es mejor para pilotos que buscan características de vuelo específicas, particularmente aquellos que priorizan la suavidad sobre la capacidad de respuesta absoluta.
Ardupilot/PX4
Ardupilot y PX4 son sistemas de piloto automático de código abierto de nivel profesional. Los he usado para trabajos más serios de mapeo y topografía.
Las fortalezas de estos sistemas incluyen una planificación de misiones completa y características profesionales. El nivel de capacidad autónoma supera con creces lo que está disponible en otras opciones de firmware.
Sus debilidades incluyen una configuración compleja y menos optimización para agilidad. Estos no son sistemas que elegiría para estilo libre o carreras.
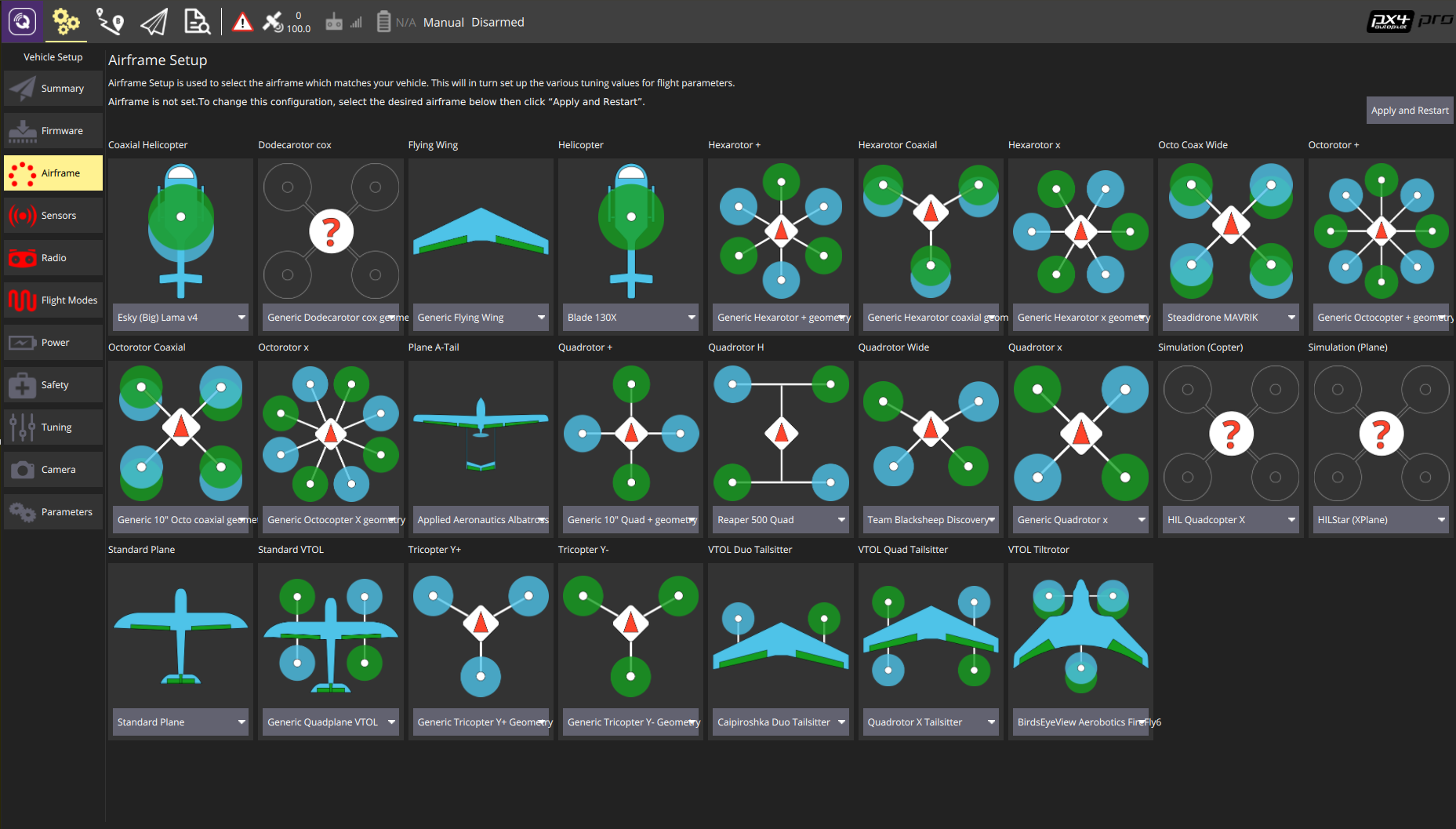
Ardupilot y PX4 son mejores para mapeo, trabajo de topografía y aplicaciones profesionales donde la confiabilidad y las capacidades autónomas son más importantes que la agilidad.
Comparación de características de firmware
En mi experiencia usando estas diferentes opciones de firmware, he desarrollado una idea de sus fortalezas relativas en diferentes áreas:
| Característica | Betaflight | INAV | KISS | Emuflight | Ardupilot |
|---|---|---|---|---|---|
| Modo Acro | ★★★★★ | ★★★★☆ | ★★★★★ | ★★★★★ | ★★★☆☆ |
| Modos GPS | ★★☆☆☆ | ★★★★★ | ★★☆☆☆ | ★★☆☆☆ | ★★★★★ |
| Opciones OSD | ★★★★☆ | ★★★★☆ | ★★★☆☆ | ★★★★☆ | ★★★☆☆ |
| Facilidad de Configuración | ★★★☆☆ | ★★☆☆☆ | ★★★★★ | ★★★☆☆ | ★☆☆☆☆ |
| Soporte de la Comunidad | ★★★★★ | ★★★★☆ | ★★★☆☆ | ★★★☆☆ | ★★★★☆ |
| Frecuencia de Actualización | ★★★★★ | ★★★★☆ | ★★☆☆☆ | ★★★☆☆ | ★★★★☆ |
| Opciones de Hardware | ★★★★★ | ★★★★☆ | ★★☆☆☆ | ★★★★☆ | ★★★☆☆ |
Seleccionando el Controlador de Vuelo Adecuado
Elegir el controlador de vuelo apropiado depende de tus necesidades específicas y requisitos de construcción. Después de construir docenas de drones diferentes, he desarrollado algunas pautas para diferentes aplicaciones.
Para Drones de Carreras
Al construir drones de carreras, priorizo el rendimiento, la confiabilidad y la simplicidad. Cada gramo importa, y las características innecesarias solo agregan peso.
Recomiendo un procesador F4 o F7 para altas tasas de bucle. Si bien el F7 tiene más potencia de procesamiento, muchos corredores top todavía usan placas F4 porque son más livianas y perfectamente capaces de manejar las demandas de las carreras.
Para el giroscopio, prefiero la serie MPU6000 o ICM20602 por su confiabilidad. Una señal de giroscopio limpia es fundamental para las carreras, donde pequeñas perturbaciones pueden afectar el manejo a altas velocidades.
El factor de forma debe ser de 20×20mm para construcciones compactas o de 30.5×30.5mm para construcciones estándar. He trasladado la mayoría de mis construcciones de carreras a 20×20mm para ahorrar peso y espacio.
En cuanto a la integración, una pila FC+ESC crea construcciones limpias con un cableado mínimo. Esto reduce el peso y la posibilidad de fallas en el cableado, que son comunes en los choques de carreras.
Para el firmware, uso exclusivamente Betaflight optimizado para carreras. Los valores predeterminados han mejorado mucho, pero aún hago ajustes para mi estilo de vuelo específico.
Algunos ejemplos de controladores de vuelo con los que he tenido éxito para carreras incluyen el iFlight SucceX-E F4/F7, T-Motor F7 y SpeedyBee F4/F7.
Para Drones de Estilo Libre
Para drones de estilo libre, priorizo la confiabilidad, un conjunto de características completo y el rendimiento. Estas construcciones reciben más abuso que cualquier otra, por lo que la durabilidad es clave.
Recomiendo un procesador F7 para un mejor filtrado y características. La potencia de procesamiento adicional ayuda con el filtrado complejo, que es importante para las altas relaciones potencia-peso comunes en las construcciones de estilo libre.
El giroscopio debe estar bien aislado para una señal limpia. El estilo libre implica maniobras de alta potencia que crean mucha vibración, por lo que un buen aislamiento hace una diferencia significativa.
Un sensor de corriente preciso es importante para la gestión de la batería. El vuelo de estilo libre puede implicar cambios rápidos en la demanda de energía, por lo que conocer el estado de la batería es crucial.
La capacidad de caja negra a través de flash incorporado o tarjeta SD es esencial para la sintonización. He descubierto que una sintonización adecuada hace una gran diferencia en el rendimiento del estilo libre, y los datos de la caja negra son la clave para una buena sintonización.
Un OSD con todas las funciones proporciona información importante durante el vuelo. Confío en mi OSD para decirme cuándo es hora de aterrizar, lo cual es fácil de olvidar cuando te diviertes con trucos de estilo libre.
Los controladores de vuelo con los que he tenido buenas experiencias para estilo libre incluyen el Matek F722-SE, Holybro Kakute F7 y Diatone Mamba F722.
Para Drones de Largo Alcance/Cinematográficos
Para aplicaciones de largo alcance y cinematográficas, priorizo la confiabilidad, las características del GPS y la eficiencia energética. Estas construcciones deben ser confiables cuando se vuela lejos de casa.
Recomiendo un procesador F7 para manejar el GPS y otros periféricos. Los UART adicionales y la potencia de procesamiento son valiosos para los múltiples sistemas que generalmente se encuentran en las construcciones de largo alcance.
Un barómetro es útil para el mantenimiento de altitud y características relacionadas. Al volar lejos, tener información de altitud confiable es importante para la navegación y la gestión de la batería.
Se necesitan múltiples UART para GPS, telemetría, control de cámara, etc. Mis construcciones de largo alcance generalmente usan al menos 5-6 UART para varios sistemas.
El soporte de firmware INAV es importante para las funciones de navegación. Si bien Betaflight tiene capacidades GPS básicas, INAV es muy superior para tareas de navegación serias.
El filtrado de energía limpia es esencial para tiempos de vuelo prolongados. Volar a larga distancia se trata de eficiencia, y la energía limpia ayuda a maximizar el tiempo de vuelo.
Los controladores de vuelo que me han servido bien para estas aplicaciones incluyen el Matek F765-WING, Holybro Kakute H7 e iFlight Beast H7.
Para Construcciones Micro
Al construir micro drones, priorizo el tamaño, el peso y la integración. Cada componente debe ser lo más pequeño y liviano posible.
El factor de forma debe ser de 16×16mm o 20×20mm para caber en marcos compactos. Me ha sorprendido lo capaces que se han vuelto estos diminutos controladores de vuelo.
Los diseños AIO con ESC integrados simplifican la construcción y ahorran espacio. En las construcciones más pequeñas, los componentes separados simplemente no son prácticos.
Los componentes ultraligeros son esenciales para un buen rendimiento de vuelo. Un controlador de vuelo pesado en una construcción micro afectará notablemente el manejo.
Un diseño simplificado con solo características esenciales ayuda a minimizar el peso. Las características como los barómetros y los UART adicionales a menudo se omiten para ahorrar peso.
Los controladores de vuelo que he usado con éxito en construcciones micro incluyen el HGLRC Zeus F4/F7 AIO, BetaFPV F4 AIO y NamelessRC F4/F7 AIO.
Para Principiantes
Para los principiantes, recomiendo priorizar la facilidad de uso, la durabilidad y el valor. Es probable que tus primeras construcciones se estrellen con más frecuencia, por lo que la resistencia es importante.
Un procesador F4 es suficiente para aprender. Si bien el F7 ofrece más características, una placa F4 proporcionará todo lo que un principiante necesita a un costo menor.
Las características de protección como el recubrimiento conformal y el diseño robusto ayudan a sobrevivir a los choques. Siempre recomiendo a los principiantes que apliquen un recubrimiento conformal adicional a sus controladores de vuelo: es un seguro barato contra cortocircuitos accidentales.
Una buena documentación y recursos de soporte facilitan la curva de aprendizaje. Algunos fabricantes proporcionan una documentación mucho mejor que otros, lo que hace una gran diferencia cuando estás aprendiendo.
El firmware Betaflight con buenos valores predeterminados permite el éxito sin una sintonización extensa. La configuración predeterminada ha mejorado drásticamente en los últimos años, lo que facilita mucho que los principiantes logren un buen rendimiento de vuelo.
Las opciones económicas brindan un buen valor sin características excesivas. No es necesario gastar extra en características que no usarás mientras aprendes.
Los controladores de vuelo que a menudo recomiendo a los principiantes incluyen el iFlight SucceX-E F4, Matek F405-STD y JHEMCU GHF411.
Instalación y Configuración del Controlador de Vuelo
La instalación y configuración adecuadas son cruciales para un rendimiento óptimo. He cometido todos los errores posibles en esta área, así que he aprendido lo que funciona y lo que no.
Instalación de Hardware
Consideraciones de Montaje
La orientación de tu controlador de vuelo es crítica: la flecha debe apuntar hacia adelante, o puedes configurar una orientación diferente en el software. He aprendido a verificar esto dos veces antes de cada vuelo inaugural, ya que es un error fácil de cometer.
El aislamiento de vibraciones a través del montaje suave con ojales o cinta de espuma hace una diferencia significativa en el rendimiento de vuelo. Ahora uso montaje suave en todas mis construcciones – la mejora en los datos del giroscopio es notable.
Para obtener información más detallada sobre el aislamiento de vibraciones, consulte:
Amortiguación de vibraciones de drones
La ubicación debe estar en el centro de gravedad y protegida de choques. Trato de colocar el controlador de vuelo en el centro del marco, tanto para el equilibrio como para proporcionar la máxima protección.
El acceso al puerto USB es importante para la configuración y las actualizaciones. He construido drones donde tuve que desmontarlos parcialmente para conectar el USB – no es un error que repetiré.
Un flujo de aire adecuado para enfriar los componentes electrónicos evita problemas de sobrecalentamiento. Los controladores de vuelo pueden calentarse bastante, especialmente cuando están empaquetados cerca de los ESC y los transmisores de video.
Mejores prácticas de cableado
El enrutamiento limpio de los cables lejos de los componentes sensibles reduce las interferencias. He descubierto que mantener los cables de señal alejados de los cables de alimentación hace una diferencia notable en el rendimiento.
Las conexiones seguras a través de soldaduras adecuadas o conectores de calidad evitan fallas. He tenido demasiados choques causados por malas conexiones como para tomar atajos aquí.
El alivio de tensión evita la tensión en las juntas de soldadura y los conectores. Un pequeño precinto o una gota de pegamento caliente puede evitarle frustrantes problemas intermitentes.
La separación de los cables de señal de los cables de alimentación reduce el ruido. Siempre trato de enrutar los cables de señal en el lado opuesto de la pila de los cables de alimentación.
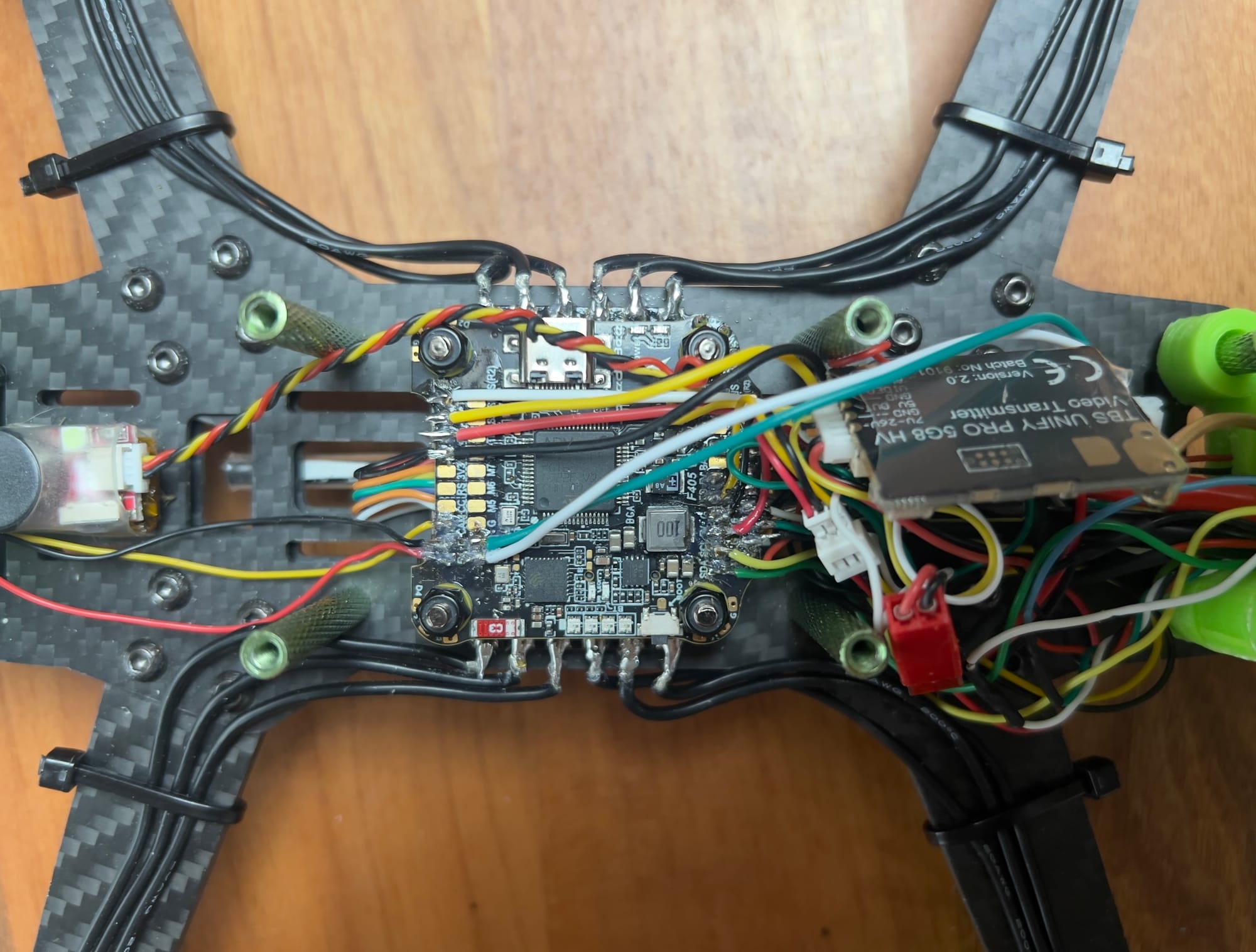
Minimizar la longitud del cable reduce el ruido y el peso. Corto todos los cables a la longitud exacta necesaria – sin bucles ni holguras adicionales.
Para obtener información más detallada sobre el cableado, consulte:
Guía de cableado de drones
Configuración de software
Proceso de configuración inicial
El proceso de configuración sigue una secuencia lógica que he refinado a lo largo de muchas construcciones:
- Instalar el software Configurator: Mantengo versiones separadas para diferentes ramas de firmware para evitar problemas de compatibilidad.
- Conectar el FC: Use un cable USB de calidad que admita transferencia de datos. He rastreado muchos problemas misteriosos de conexión a cables USB baratos o dañados.
- Flashear Firmware: Actualizar a la última versión estable. Por lo general, evito las versiones de vanguardia para las compilaciones de las que dependo; la estabilidad es más importante que las funciones más nuevas.
- Configuración básica:
• Establecer la orientación correcta de la placa
• Configurar UART para periféricos
• Configurar el protocolo del receptor
• Configurar el monitoreo de la batería - Configuración del receptor:
• Vincular el receptor al transmisor
• Verificar el mapeo de canales
• Configurar el comportamiento de failsafe (siempre pruebo esto antes del primer vuelo; me ha salvado de fugas más de una vez) - Configuración del motor:
• Verificar la dirección del motor (¡siempre con las hélices apagadas!)
• Configurar el protocolo ESC (DShot600 es mi recomendación para la mayoría de las compilaciones)
• Verificar si hay ruido o vibración inusuales - Configuración del modo de vuelo:
• Configurar el interruptor de armado
• Configurar modos de vuelo adicionales
• Uso un diseño de interruptor consistente en todos mis modelos para evitar confusiones - Configuración de OSD:
• Personalizar los elementos de visualización en pantalla
• Colocar elementos para visibilidad
• Configurar advertencias y alarmas - Ajuste de PID:
• Comenzar con valores predeterminados o preajustes
• Ajustar según sea necesario después de los vuelos iniciales
Problemas y soluciones comunes de configuración
A lo largo de los años, he encontrado y resuelto innumerables problemas de configuración. Aquí están algunos de los problemas más comunes y sus soluciones:
Sin conexión al Configurator
Cuando su controlador de vuelo no se conecta al configurador, puede ser increíblemente frustrante. He encontrado varias causas potenciales:
• Controladores incorrectos/faltantes: A menudo el culpable. He aprendido a mantener una colección de controladores para diferentes controladores de vuelo, ya que Windows en particular puede ser quisquilloso.
• Puertos/cables USB dañados: Causan problemas misteriosos de conexión. Ahora uso cables USB de alta calidad y tengo un cable dedicado "conocido como bueno" para solucionar problemas.
• Problemas del modo de cargador de arranque: A veces, el controlador de vuelo se atasca en el modo de cargador de arranque. He desarrollado una rutina de cortocircuitar los pines de arranque y ciclar la energía para forzarlo al modo correcto.
• Puerto COM incorrecto: Un error simple que es fácil de cometer. Siempre verifico el administrador de dispositivos para confirmar qué puerto está usando el controlador de vuelo.
Motores girando en la dirección incorrecta
Tener motores que giren en la dirección equivocada es un problema común con soluciones simples:
• Intercambiar cables del motor: Puede intercambiar dos cables del motor para invertir la dirección. He hecho esto innumerables veces, aunque requiere volver a soldar.
• Configuración de BLHeli: Usar el configurador de BLHeli para invertir la dirección del motor es más fácil si está utilizando ESC BLHeli. Este es mi método preferido ya que no requiere ningún cambio de hardware.
• Verificación previa al vuelo: Siempre verifique el orden y la dirección del motor en el configurador antes del primer vuelo. He estrellado más de un dron por saltarme este paso.
Comportamiento de vuelo inestable
Cuando su dron no vuela bien, hay varias causas potenciales:
• Orientación incorrecta del FC: Un culpable común. Una vez pasé horas solucionando un comportamiento errático solo para darme cuenta de que tenía el controlador de vuelo girado 90 grados con respecto a lo que estaba configurado en el software.
• Problemas de vibración: Pueden causar todo tipo de comportamientos extraños. Me he convertido en un firme defensor del aislamiento adecuado de las vibraciones después de ver la diferencia dramática que hace en el rendimiento de vuelo.
• Problemas de ajuste de PID: A menudo se manifiestan como oscilaciones o respuesta lenta. En caso de duda, restablezco a los PID predeterminados y comienzo de nuevo.
• Ruido del giroscopio: Puede causar un comportamiento nervioso e impredecible. He descubierto que la configuración adecuada del filtro y un buen aislamiento del hardware hacen una diferencia significativa.
Receptor no detectado
Cuando su receptor no se comunica con su controlador de vuelo, verifique estos problemas comunes:
• Asignación UART incorrecta: El problema más frecuente. Siempre verifico a qué UART está conectado el receptor y me aseguro de que esté configurado correctamente en la pestaña Puertos.
• Protocolo de receptor incorrecto: Otro error común. El protocolo en la pestaña Configuración debe coincidir con su tipo de receptor.
• Problemas de enlace: Pueden causar fallos de comunicación. He aprendido a seguir cuidadosamente el procedimiento de enlace para cada tipo de receptor.
• Problemas de cableado: Especialmente con las conexiones de señal y tierra, pueden impedir la comunicación. Siempre compruebo la continuidad con un multímetro si sospecho que hay problemas de cableado.
Temas avanzados del controlador de vuelo
Para los pilotos experimentados que buscan optimizar sus configuraciones, estos conceptos avanzados proporcionan conocimientos más profundos. He pasado años explorando estas áreas para sacar el máximo provecho de mis construcciones.
Ajuste y filtrado de PID
El corazón del rendimiento del controlador de vuelo reside en el ajuste y filtrado de PID. Aquí es donde el arte se encuentra con la ciencia en el mundo FPV.
Conceptos básicos de PID
Comprender el controlador PID es fundamental para un buen ajuste:
P (Proporcional) proporciona una corrección inmediata al error. Pienso en esto como la "fuerza" de la corrección. Demasiado alto y obtienes oscilaciones; demasiado bajo y el quad se siente lento.
I (Integral) acumula el error a lo largo del tiempo. Esto ayuda a superar fuerzas persistentes como el viento o una construcción desequilibrada. He descubierto que el término I a menudo es sobreutilizado por los principiantes: un poco va un largo camino.
D (Derivada) responde a la tasa de cambio del error. Esto amortigua las correcciones del término P y evita el sobreimpulso. Obtener el término D correcto es crucial para un vuelo suave: demasiado bajo y obtienes esquinas con rebote, demasiado alto y obtienes motores calientes.
Filtrado avanzado
Un filtrado adecuado hace una gran diferencia en el rendimiento del vuelo:
El filtrado del giroscopio elimina el ruido antes de que llegue al controlador PID. He aprendido que los datos de giroscopio más limpios conducen a un mejor rendimiento de vuelo y motores más fríos.
El filtrado del término D es específico para el término derivado, que es particularmente sensible al ruido. Presto especial atención a esto, ya que el ruido excesivo del término D rápidamente conduce a motores calientes.
El filtrado dinámico de muescas se dirige automáticamente a las frecuencias de ruido del motor. Esto fue un cambio de juego para mí: se adapta a diferentes niveles de aceleración y reduce drásticamente el ruido sin agregar latencia.
El filtrado RPM utiliza la telemetría ESC para un objetivo de ruido preciso. Cuando habilité esto por primera vez en una construcción problemática, la diferencia fue como el día y la noche: de repente el quad era suave como la mantequilla sin motores calientes.
Los filtros estáticos se dirigen a fuentes de ruido conocidas a frecuencias fijas. Los uso con moderación, ya que agregan latencia, pero son valiosos para abordar problemas de ruido específicos.
Enfoque de ajuste de filtros
Mi enfoque para el ajuste de filtros ha evolucionado con el tiempo:
Comienzo con valores predeterminados o preajustes, que han mejorado mucho en las versiones recientes de Betaflight. A menudo, estos son lo suficientemente buenos para el vuelo casual.
Para un rendimiento serio, analizo los registros de la caja negra para identificar las características del ruido. Esto revela frecuencias específicas que necesitan ser objetivo.
Ajusto los filtros para atacar el ruido específico mientras mantengo la capacidad de respuesta. Este es un acto de equilibrio: demasiado filtrado agrega latencia, muy poco deja ruido.
Las pruebas incrementales con pequeños cambios son cruciales. Hago un cambio a la vez y pruebo a fondo antes de seguir adelante.
La clave es equilibrar el filtrado con la latencia y la capacidad de respuesta. Un filtrado perfecto con demasiada latencia se siente peor que un poco de ruido con una respuesta nítida.
Registro y análisis de Blackbox
La grabación de datos de vuelo ha transformado mi enfoque del ajuste y la resolución de problemas:
Configuración de Blackbox
Las opciones de almacenamiento incluyen flash a bordo frente a tarjeta SD. Prefiero las tarjetas SD para trabajos de ajuste serios, ya que proporcionan mucha más capacidad.
Las tasas de registro equilibran el detalle con la duración. Para el ajuste inicial, utilizo tasas altas para capturar problemas sutiles; para vuelos más largos, reduzco la tasa.
Seleccionar parámetros relevantes para registrar ayuda a administrar el tamaño del archivo. Me concentro en los datos del giroscopio, los valores PID y las salidas del motor para la mayoría de los trabajos de ajuste.
Análisis de registros
INAV y Betafligth tienen sus propias herramientas para la exploración de registros de caja negra. He pasado incontables horas mirando estos gráficos, aprendiendo a interpretar los patrones.

PIDtoolbox es otra poderosa herramienta para el análisis profundo de los registros de su controlador de vuelo.
Las métricas clave que busco incluyen el trazo del giroscopio (para el ruido), la respuesta PID (para el ajuste) y las salidas del motor (para el margen). Las relaciones entre estos cuentan la historia real de cómo está funcionando su quad.
Identificar problemas se vuelve más fácil con la experiencia. He aprendido a reconocer las firmas de varios problemas: el ruido se ve diferente de los problemas de PID, que se ven diferentes de los problemas mecánicos.
Uso de registros para ajuste
El análisis de ruido ayuda a identificar las frecuencias que requieren filtrado. Busco picos en el gráfico FFT que correspondan a las frecuencias del motor o sus armónicos.
La respuesta al escalón muestra con qué rapidez responde la aeronave a las entradas. Quiero ver una respuesta rápida sin un sobreimpulso excesivo.
La evaluación del término P revela oscilaciones o lentitud. Una buena respuesta del término P muestra una corrección rápida sin continuar rebotando de un lado a otro.
El ruido del término D es una causa común de motores calientes. Busco ruido amplificado en el término D que corresponda a picos de salida del motor.
El margen de los motores asegura que los motores no estén al máximo. Quiero ver al menos un 20% de margen en las salidas de los motores durante maniobras agresivas.
CLI de Betaflight y Configuración Avanzada
La interfaz de línea de comandos proporciona potentes opciones de configuración que no están disponibles en la GUI:
Comandos Esenciales de CLI
diff all muestra todos los ajustes que difieren de los valores predeterminados. Este es mi comando preferido para verificar mi configuración y compartir ajustes con otros.
dump muestra todos los ajustes actuales, incluidos los valores predeterminados. Esto es útil para comprender la configuración completa.
get [parámetro] muestra valores de parámetros específicos. Uso esto para verificar ajustes individuales sin tener que revisar toda la configuración.
set [parámetro]=[valor] cambia los valores de los parámetros. Esto permite un control preciso sobre cada aspecto del controlador de vuelo.
save guarda la configuración actual en la memoria. He aprendido por las malas a usar esto después de hacer cambios – olvidarlo significa perder todo tu trabajo.
resource muestra la asignación de recursos para pines y periféricos. Esto es esencial para la configuración avanzada y la resolución de problemas.
resource [tipo_de_recurso] [índice] [pin] reasigna recursos a diferentes pines. He usado esto para liberar pines para funciones específicas o solucionar problemas de hardware.
status muestra información del estado del sistema. Esto es útil para verificar qué características están activas y cómo está configurado el sistema.
Reasignación de Recursos
Reasignar pines para diferentes funciones es una capacidad poderosa:
Las salidas de los motores se pueden mover a diferentes pines. He usado esto para solucionar problemas con pads dañados en controladores de vuelo.
La reasignación de UART permite mover puertos serie a diferentes pines. Esto me ha salvado cuando los pines UART predeterminados estaban dañados o se necesitaban para otra función.
El control LED se puede configurar para diferentes pines. He usado esto para agregar tiras LED a construcciones donde el pin LED predeterminado no estaba disponible.
Las funciones especiales como el control de la cámara y las salidas del zumbador se pueden reasignar. Esta flexibilidad me ha permitido agregar características a construcciones que de otro modo no las soportarían.
Configuraciones de Mezclador Personalizado
Para diseños de motores no estándar, los mezcladores personalizados son esenciales:
Las mezclas de motores personalizadas ajustan la influencia del motor en cada eje. He usado esto para construcciones inusuales como marcos asimétricos o montajes de cámara pesados.
Las configuraciones especializadas como tricópteros y colas en V requieren mezcla personalizada. El mezclador predeterminado funciona para cuadricópteros estándar, pero cualquier cosa inusual necesita personalización.
La linealización del empuje mejora la respuesta del acelerador al compensar las características no lineales del motor. Esto hace que el acelerador se sienta más consistente en todo el rango.
Compilación y Personalización del Firmware
Construir firmware personalizado permite optimizaciones específicas:
Por qué Compilar Firmware Personalizado
Habilitar características experimentales proporciona acceso a capacidades de vanguardia. He compilado firmware personalizado para probar nuevas características antes de que se lancen oficialmente.
Optimizar para hardware específico puede mejorar el rendimiento. Eliminar componentes innecesarios libera potencia de procesamiento para lo que importa.
Personalizar los valores predeterminados establece tu punto de partida preferido. Mantengo una compilación personalizada con mis ajustes preferidos incorporados.
Corregir errores a veces requiere implementar parches antes de los lanzamientos oficiales. He compilado firmware personalizado para abordar problemas específicos que afectaron mis construcciones.
Proceso de Compilación
Configurar el entorno de desarrollo requiere Git, una cadena de herramientas y otras dependencias. Mantengo una VM de desarrollo dedicada para este propósito.
Clonar el repositorio te proporciona el código fuente con el que trabajar. Siempre verifico la rama o etiqueta específica desde la que quiero construir.
Configurar la compilación implica seleccionar el objetivo y las características. Aquí es donde puedes personalizar lo que se incluye en tu firmware.
Compilar construye el firmware desde el código fuente. Las computadoras modernas hacen que este proceso sea bastante rápido.
Flashear carga el firmware compilado en tu controlador de vuelo. Siempre hago una copia de seguridad del firmware original antes de flashear compilaciones personalizadas.
Personalizaciones Comunes
Las modificaciones de objetivos permiten ajustes específicos de hardware. He modificado objetivos para que coincidan mejor con el hardware específico que estoy usando.
Los interruptores de características habilitan o deshabilitan capacidades específicas. Eliminar las características que no usas libera recursos para lo que importa.
Los cambios predeterminados modifican la configuración inicial. Establezco mis valores predeterminados preferidos para PID, tasas y otros ajustes.
Las optimizaciones de rendimiento se ajustan para casos de uso específicos. Las construcciones de carreras se benefician de diferentes optimizaciones que las construcciones de largo alcance.
Solución de Problemas del Controlador de Vuelo
Incluso los mejores controladores de vuelo pueden desarrollar problemas. Así es como diagnostico y abordo problemas comunes:
Solución de Problemas de Hardware
Problemas de Alimentación
Cuando tu FC no se enciende o experimenta reinicios aleatorios, verifica estas causas comunes:
La salida del regulador de voltaje debe ser limpia y estable. Uso un multímetro para verificar el voltaje adecuado en los puntos de prueba.
La conexión y el voltaje de la batería deben estar dentro del rango de funcionamiento del FC. He dañado controladores de vuelo al conectar baterías de mayor voltaje para las que estaban diseñados.
Agregar o reemplazar condensadores de filtro puede resolver muchos problemas relacionados con la alimentación. Agrego un condensador de baja ESR a casi todas las construcciones como un seguro barato contra problemas de alimentación.
Los cortocircuitos pueden causar problemas misteriosos de alimentación. Uso un multímetro en modo de continuidad para verificar si hay cortocircuitos entre la alimentación y la tierra.
La capacidad adecuada de la fuente de alimentación es esencial, especialmente para construcciones con muchos periféricos. He visto problemas en los que el FC se encendía bien por sí solo pero fallaba cuando todos los componentes estaban conectados.
Problemas del Sensor
Cuando los sensores proporcionan lecturas erráticas o una mala estabilización:
Recalibrar los sensores a menudo resuelve problemas menores. Me aseguro de que el quad esté perfectamente nivelado durante la calibración del acelerómetro.
El daño físico puede afectar el rendimiento del sensor. He tenido que reemplazar controladores de vuelo después de que choques fuertes dañaran el giroscopio.
Mejorar el aislamiento de vibraciones hace una diferencia significativa en el rendimiento del sensor. Ahora uso montaje blando en todas mis construcciones.
Las actualizaciones de firmware a veces resuelven problemas de sensores. He visto errores en versiones específicas de firmware que afectaron las lecturas de los sensores.
Si los sensores están dañados sin posibilidad de reparación, reemplazar el controlador de vuelo es la única opción. Mantengo controladores de vuelo de repuesto para mis construcciones principales por esta razón.
Fallas de Conexión
Cuando los periféricos no se detectan o la comunicación es intermitente:
Verificar el cableado y las conexiones es el primer paso. Uso una lupa para inspeccionar pequeñas soldaduras y conexiones.
Verificar las configuraciones de UART asegura que los protocolos correctos estén habilitados en los puertos correctos. He pasado horas solucionando problemas solo para descubrir que habilité la característica incorrecta en un UART.
Probar con diferentes cables puede identificar problemas de conexión. Mantengo cables USB en buen estado específicamente para solucionar problemas.
Los pines o juntas de soldadura dañados a menudo causan problemas intermitentes. He solucionado muchos problemas al refluir juntas de soldadura que se veían bien a simple vista.
Los niveles de señal y los protocolos deben coincidir entre los dispositivos. He tenido problemas donde los dispositivos de 3.3V y 5V no se comunicaban correctamente debido a un desajuste de voltaje.
Solución de problemas de software
Problemas de firmware
Cuando el firmware se bloquea, se congela o se comporta de manera inesperada:
Actualizar al firmware estable más reciente a menudo resuelve problemas conocidos. Generalmente evito las versiones de vanguardia para las compilaciones de las que dependo.
Probar diferentes versiones de firmware puede evitar errores específicos. He tenido que degradar el firmware para evitar problemas que afectaban mi configuración particular.
Restablecer a los valores predeterminados y reconfigurar desde cero a veces resuelve problemas misteriosos. Esto a menudo es más rápido que tratar de rastrear un ajuste problemático específico.
Reescribir con borrado completo del chip borra cualquier configuración o memoria dañada. Uso esto como último recurso cuando falla la solución de otros problemas.
Los problemas de compatibilidad de hardware pueden causar un comportamiento inesperado. Verifico la lista de objetivos compatibles antes de actualizar el firmware.
Problemas de configuración
Cuando tu quad no responde correctamente a las entradas o las funciones no se activan:
Verificar todos los ajustes de configuración es tedioso pero efectivo. Reviso cada pestaña en el configurador metódicamente.
Restablecer a los valores predeterminados y reconfigurar a menudo resuelve problemas con ajustes en conflicto. A veces es más rápido que tratar de encontrar el problema específico.
Verificar las asignaciones de interruptores de modo asegura que se activen como se espera. Uso la pestaña del receptor para verificar que las posiciones de los interruptores se reconozcan correctamente.
Verificar el mapeo de canales del receptor es crucial para un control adecuado. He tenido problemas donde los canales estaban mapeados incorrectamente, causando un comportamiento extraño.
Exportar y revisar la configuración puede ayudar a identificar problemas. Comparo las configuraciones entre compilaciones que funcionan y que no funcionan para detectar diferencias.
Problemas de ajuste de rendimiento
Cuando tu quad oscila, responde con lentitud o los motores se calientan:
Restablecer los PID a los valores predeterminados proporciona un punto de partida conocido. Hago esto cada vez que realizo cambios significativos en una compilación.
Verificar la configuración del filtro asegura que sea apropiada para tu compilación. Demasiado filtrado causa latencia; muy poco deja ruido.
Verificar problemas mecánicos como componentes sueltos o hélices dañadas es esencial. He perseguido problemas de ajuste que en realidad fueron causados por un marco agrietado.
Analizar los registros de la caja negra proporciona información sobre problemas específicos. Esta es la herramienta de solución de problemas más poderosa para problemas de rendimiento.
Aplicar preajustes apropiados para tu tipo de compilación a menudo resuelve problemas comunes. Los preajustes en las versiones recientes de Betaflight son bastante buenos.
Cuándo reemplazar un controlador de vuelo
A veces, el reemplazo es la única opción. Reemplazo los controladores de vuelo cuando:
El daño físico afecta el rendimiento, especialmente a componentes críticos como el giroscopio o el procesador. He intentado salvar placas dañadas, pero rara vez vale la pena el esfuerzo.
Los sensores han fallado o se han vuelto poco confiables. Un controlador de vuelo con un giroscopio poco confiable es peligroso para volar.
Los problemas del procesador o la memoria causan inestabilidad. Si tu controlador de vuelo se reinicia o se congela aleatoriamente, es hora de reemplazarlo.
La actualización para acceder a nuevas funciones a veces requiere nuevo hardware. He reemplazado controladores de vuelo perfectamente funcionales para obtener acceso a funciones que requerían hardware más nuevo.
Después de un daño significativo por agua o electricidad, el reemplazo a menudo es más seguro que la reparación. Aprendí esta lección después de intentar salvar un controlador de vuelo que se había mojado: funcionó por un tiempo, luego falló catastróficamente en pleno vuelo.
Tendencias futuras en controladores de vuelo
El panorama de los controladores de vuelo continúa evolucionando rápidamente. Aquí es donde veo que se dirigen las cosas:
Avances de hardware
Los procesadores H7 y más potentes se están convirtiendo en el nuevo estándar. He estado probando controladores de vuelo H7 y, aunque las diferencias son sutiles ahora, brindan margen para futuras características.
Los sensores mejorados con pisos de ruido más bajos mejorarán el rendimiento de vuelo. Cada generación de giroscopios mejora en el rechazo del ruido mientras mantiene la sensibilidad.
La integración está aumentando, con más soluciones todo en uno. La tendencia hacia pilas de vuelo altamente integradas continuará, haciendo que las compilaciones sean más limpias y simples.
La reducción de tamaño continúa, con componentes cada vez más pequeños y livianos. Me sorprende cuánta funcionalidad cabe en los controladores de vuelo modernos de 16×16 mm.
Las mejoras en la eficiencia energética brindan un mejor rendimiento por vatio. Esto es particularmente importante para compilaciones de largo alcance y resistencia.
Innovaciones de software
El aprendizaje automático para el ajuste y filtrado adaptativo está en el horizonte. He visto experimentos tempranos con ajuste basado en ML que muestran promesa para optimizar automáticamente el rendimiento.
Las funciones avanzadas de autonomía están mejorando, con mejores capacidades de GPS y navegación. La brecha entre las capacidades de los drones profesionales y de aficionados se está reduciendo.
La configuración simplificada con una configuración más intuitiva está haciendo que el hobby sea más accesible. La curva de aprendizaje se está volviendo menos pronunciada con cada generación de firmware.
Están surgiendo opciones de firmware especializadas adaptadas a estilos de vuelo específicos. Estamos viendo más divergencia entre el firmware de carreras, estilo libre y largo alcance.
Los valores predeterminados mejorados significan una mejor experiencia lista para usar. Los controladores de vuelo modernos vuelan notablemente bien con la configuración predeterminada.
Tecnologías emergentes
La visión por computadora para la navegación basada en cámara y la evasión de obstáculos se está volviendo más accesible. He experimentado con sistemas de visión básicos y se están volviendo más prácticos para uso aficionado.
Las redes de malla permiten la comunicación de dron a dron. Esto abre posibilidades para vuelos coordinados y mayor seguridad.
La telemetría avanzada proporciona datos de vuelo más completos. La cantidad de información disponible para los pilotos sigue aumentando.
La integración en la nube para la configuración y el análisis de datos se está volviendo más común. Están surgiendo plataformas en línea para compartir y analizar datos de vuelo.
La integración de simulación con gemelos digitales permite realizar pruebas en entornos virtuales. He usado la simulación para probar configuraciones antes de aplicarlas al hardware real.
Preguntas frecuentes sobre controladores de vuelo
A lo largo de los años, me han hecho innumerables preguntas sobre controladores de vuelo. Aquí están las más comunes:
¿Cuál es la diferencia entre los controladores de vuelo F4 y F7?
F4 y F7 se refieren a la serie de procesadores STM32 utilizados en el controlador de vuelo. En mi experiencia, las principales diferencias son:
Los procesadores F7 son más potentes (generalmente 216-400 MHz frente a 168-216 MHz para F4), lo que permite velocidades de bucle más altas, filtrado más complejo y funciones adicionales. Noto más la diferencia en situaciones exigentes con mucho filtrado.
Los controladores F7 generalmente tienen más UART y un mejor rendimiento general. Esto es importante cuando se conectan múltiples periféricos como GPS, telemetría y control de cámara.
Los controladores F4 son más asequibles y aún suficientes para la mayoría de los estilos de vuelo. Muchas de mis compilaciones todavía usan placas F4 porque ofrecen un gran equilibrio entre rendimiento y costo.
Para la mayoría de los pilotos, un F4 es perfectamente adecuado, pero si estás llevando al límite el rendimiento o necesitas conectar muchos periféricos, vale la pena actualizar a un F7.
¿Cómo sé si mi controlador de vuelo está dañado?
Las señales de un controlador de vuelo dañado incluyen:
La falla al encender o conectarse a través de USB es la señal más obvia. Si tu FC no se enciende o no es reconocido por tu computadora, algo anda mal.
Lecturas erráticas de los sensores o deriva pueden indicar daño en el giroscopio. He visto esto después de choques fuertes: el quad se vuelve imposible de volar debido a movimientos aleatorios.
Reinicios o congelamientos inesperados sugieren problemas de procesador o memoria. Si tu quad se desarma aleatoriamente en pleno vuelo, el controlador de vuelo puede estar fallando.
Humo o daño visible en los componentes es un claro indicador. He liberado el humo mágico de más de un controlador de vuelo.
El sobrecalentamiento durante la operación puede indicar daño interno o cortocircuitos. Si tu FC se calienta inusualmente, algo anda mal.
Errores persistentes en el configurador a menudo apuntan a problemas de hardware. Si ves el mismo error repetidamente a pesar de reinstalar el firmware, sospecha de problemas de hardware.
La falla al armar o mantener un vuelo estable a pesar de una configuración adecuada sugiere problemas de sensor. He tenido controladores de vuelo que pasaron todas las pruebas en el banco pero fallaron en el aire.
¿Qué controlador de vuelo es mejor para un principiante?
Para principiantes, recomiendo controladores de vuelo que sean:
Confiables y bien respaldados, como el iFlight SucceX-E F4 o el Matek F405-STD. Estos han resistido la prueba del tiempo y tienen grandes comunidades de usuarios.
Razonablemente priced (alrededor de $30-40) para equilibrar calidad con restricciones presupuestarias. No hay necesidad de gastar en características de gama alta mientras se aprende.
Compatible con Betaflight para una configuración fácil y amplia documentación. El ecosistema de Betaflight tiene la mayor cantidad de recursos para principiantes.
Bien documentado con buen soporte de la comunidad para solución de problemas. Cuando inevitablemente te encuentres con problemas, tener recursos para ayudar es invaluable.
Lo suficientemente duradero para sobrevivir a los choques de aprendizaje. Busco placas con recubrimiento conformal y diseño robusto.
Que incluya características esenciales sin una complejidad abrumadora. Características como OSD y monitoreo de corriente son útiles, pero las características avanzadas pueden esperar.
Los procesadores F4 suelen ser suficientes para principiantes, siendo F7 una opción para aquellos que quieren más espacio para crecer. Comencé con procesadores F1 y estaba perfectamente feliz hasta que supe lo suficiente para apreciar las ventajas del hardware más avanzado.
¿Puedo usar cualquier controlador de vuelo con cualquier ESC?
La mayoría de los controladores de vuelo modernos pueden funcionar con la mayoría de los ESC, pero hay consideraciones de compatibilidad:
El soporte de protocolo es crítico: asegúrate de que el FC y los ESC admitan los mismos protocolos (DShot, Multishot, etc.). Prefiero DShot600 para la mayoría de las construcciones, ya que ofrece un buen equilibrio entre rendimiento y confiabilidad.
La compatibilidad de voltaje es importante: verifica que el FC pueda manejar el voltaje proporcionado por los ESC/PDB. He dañado controladores de vuelo al conectarlos a voltajes más altos de los que estaban clasificados.
Las conexiones físicas varían entre cables individuales y cables planos. Asegúrate de que tu FC y ESC tengan métodos de conexión compatibles.
Para las pilas FC/ESC, asegúrate de que estén diseñadas para funcionar juntas. Si bien es posible mezclar y combinar, las pilas diseñadas como una unidad generalmente ofrecen una mejor integración.
En general, cualquier FC de calidad puede funcionar con cualquier ESC de calidad si se configura correctamente, pero los componentes coincidentes a menudo brindan la mejor experiencia. Prefiero usar componentes del mismo fabricante cuando sea posible, ya que están diseñados para funcionar juntos.
¿Con qué frecuencia debo actualizar el firmware de mi controlador de vuelo?
No hay un cronograma fijo para las actualizaciones de firmware, pero sigo estas pautas:
Si todo funciona bien, no te sientas obligado a actualizar de inmediato. El viejo dicho "si no está roto, no lo arregles" se aplica aquí.
Actualiza para nuevas funciones cuando una versión contiene capacidades que deseas. Actualicé a Betaflight 4.3 específicamente para el filtrado RPM mejorado.
Actualiza para correcciones de errores si estás experimentando problemas abordados en una nueva versión. Reviso las notas de la versión para ver si abordan los problemas que estoy teniendo.
Para las versiones principales, espero unas semanas después del lanzamiento para recibir comentarios de la comunidad. Deja que otros encuentren los errores primero.
Evita actualizar justo antes de carreras o viajes importantes. He aprendido esta lección por las malas: una actualización de último minuto puede introducir problemas inesperados.
Siempre haz una copia de seguridad de tu configuración antes de actualizar y prepárate para dedicar tiempo a reconfigurar después de actualizaciones importantes. Mantengo notas sobre mis configuraciones específicas para cada quad para facilitar este proceso.
¿Qué causa el ruido del giroscopio del controlador de vuelo?
El ruido del giroscopio puede provenir de varias fuentes:
La vibración mecánica de los motores, hélices o resonancia del marco es la causa más común. He descubierto que el equilibrio adecuado de las hélices y los motores hace una diferencia significativa.
El ruido eléctrico de los ESC, los sistemas de alimentación o el cableado puede afectar las lecturas del giroscopio. Mantener los cables de señal alejados de los cables de alimentación ayuda a reducir esto.
Las limitaciones del sensor crean un piso de ruido inherente. Diferentes modelos de giroscopio tienen diferentes características de ruido.
Problemas de montaje como aislamiento deficiente o montaje rígido transmiten vibraciones directamente al giroscopio. Ahora uso montaje blando en todas mis construcciones.
Los componentes dañados pueden causar un aumento del ruido. Un giroscopio que ha sido sometido a choques fuertes puede desarrollar niveles de ruido más altos.
La reducción del ruido generalmente implica un mejor aislamiento de vibraciones, cableado mejorado, componentes de calidad y configuraciones de filtrado apropiadas. Primero abordo los problemas mecánicos y luego uso el filtrado de software para manejar el ruido restante.
¿Puedo transferir configuraciones entre controladores de vuelo?
Sí, pero con limitaciones:
La transferencia de configuraciones funciona mejor entre el mismo tipo de firmware (por ejemplo, de Betaflight a Betaflight). He tenido resultados mixtos al intentar transferir configuraciones entre diferentes tipos de firmware.
El hardware similar proporciona mejores resultados al transferir configuraciones. Pasar de una placa F4 a otra placa F4 similar generalmente funciona bien.
Usar el comando diff all para guardar las configuraciones es el método más confiable. Guardo esta salida en un archivo de texto para cada una de mis construcciones.
Las funciones de respaldo del configurador funcionan bien para hardware idéntico. Esto es conveniente pero menos flexible que los comandos CLI.
Algunas configuraciones siempre necesitan ajustes manuales para nuevo hardware. Los mapeos de recursos, en particular, son específicos del hardware y no se transfieren bien.
Siempre revisa cuidadosamente las configuraciones transferidas, ya que las configuraciones incorrectas pueden causar un comportamiento inesperado o choques. Después de transferir las configuraciones, reviso cada pestaña en el configurador para verificar que todo se vea correcto.
¿Cuál es la diferencia entre el filtrado de giroscopio por hardware y software?
La distinción es importante para comprender cómo optimizar el rendimiento:
El filtrado por hardware se implementa en el propio sensor del giroscopio, proporcionando una reducción inicial del ruido antes de que la señal llegue al procesador. Esto varía entre los modelos de giroscopio y no se puede ajustar en el firmware.
El filtrado por software se implementa en el firmware del controlador de vuelo y se puede personalizar mediante configuración. Esto incluye filtros de muesca dinámica, filtros de paso bajo y filtrado basado en RPM.
Los controladores de vuelo modernos utilizan una combinación de ambos enfoques. Confío en el filtrado de hardware como primera línea de defensa, y luego uso el filtrado de software para abordar las características específicas de ruido de mi construcción.
La ventaja del filtrado de software es la flexibilidad: se puede ajustar para construcciones y estilos de vuelo específicos. La desventaja es que utiliza potencia de procesamiento y puede introducir latencia.
Conclusión
El controlador de vuelo es realmente el cerebro de tu dron FPV, traduciendo tus intenciones en un vuelo preciso. Después de años de construir y volar, he llegado a apreciar lo crítico que es este componente para la experiencia general.
Comprender la tecnología del controlador de vuelo, los criterios de selección y las opciones de configuración te permite optimizar el rendimiento para tus necesidades y estilo de vuelo específicos. Ya sea que estés construyendo tu primer dron o el quincuagésimo, elegir el controlador de vuelo adecuado y configurarlo correctamente tendrá un impacto profundo en tu experiencia de vuelo.
La tecnología continúa evolucionando rápidamente, con procesadores más potentes, mejores sensores y un firmware más sofisticado que proporcionan plataformas cada vez más capaces. Al dominar la configuración y ajuste del controlador de vuelo, desbloquearás todo el potencial de tu dron, logrando el equilibrio perfecto de estabilidad, capacidad de respuesta y características para tu estilo de vuelo único.
He estrellado más drones de los que me gustaría admitir en mi viaje para entender estos complejos dispositivos, pero cada falla me enseñó algo valioso. La satisfacción de un quad perfectamente ajustado que responde exactamente como se pretende hace que valga la pena toda la resolución de problemas. No hay nada como la sensación de un dron que se siente como una extensión de tus pensamientos, y el controlador de vuelo es lo que hace eso posible.


