Drohnen-Flugsteuerungen: Prinzipien und Funktionsweise
Der Flugcontroller (FC) ist das Gehirn Ihrer FPV-Drohne und übersetzt Ihre Steuereingaben in die präzisen Motorbefehle, die für den Flug erforderlich sind. Er verarbeitet Daten von verschiedenen Sensoren, führt komplexe Algorithmen aus und nimmt Hunderte von Anpassungen pro Sekunde vor, um Ihre Drohne stabil und reaktionsschnell zu halten. Dieser umfassende Leitfaden befasst sich mit der Flugcontroller-Technologie, Firmware-Optionen, Auswahlkriterien, Einrichtungsverfahren und erweiterten Funktionen, um Ihnen zu helfen, diese kritische Komponente zu verstehen und zu optimieren.
Einführung in Flugcontroller
Nach Jahren des Baus und Fliegens von FPV-Drohnen habe ich gelernt, dass keine einzelne Komponente Ihr Flugerlebnis mehr beeinflusst als der Flugcontroller. Ich erinnere mich noch an meinen ersten Bau mit einem primitiven KK-Board, das die Drohne kaum stabil hielt. Heute führen die hochentwickelten H7-Prozessoren in modernen Flugcontrollern komplexe Berechnungen durch, die noch vor wenigen Jahren wie Science-Fiction erschienen wären.

Ein Flugcontroller ist eine spezialisierte Leiterplatte, die einen Mikroprozessor, verschiedene Sensoren und Ein-/Ausgangsverbindungen enthält. Er dient als zentrale Verarbeitungseinheit Ihrer Drohne und erfüllt mehrere kritische Funktionen:
• Stabilisierung: Aufrechterhaltung eines stabilen Fluges und Ausgleich externer Kräfte
• Verarbeitung von Steuereingaben: Übersetzung Ihrer Stickbewegungen in Motorbefehle
• Sensorintegration: Sammeln und Verarbeiten von Daten von Gyroskopen, Beschleunigungsmessern usw.
• Funktionsverwaltung: Handhabung von Modi wie Acro, Angle, GPS-Hold und mehr
• Peripheriekommunikation: Schnittstelle zu Empfängern, ESCs, Kameras und anderen Komponenten
Die Evolution der Flugcontroller
Ich habe die dramatische Entwicklung der Flugcontroller miterlebt, seit ich 2019 mit meinem Hobby begonnen habe.
Alles begann mit einfachen 8-Bit-Prozessoren, die kaum in der Lage waren, eine einfache Stabilisierung zu bewältigen. Der Sprung zu 32-Bit-Controllern um 2014 war revolutionär - plötzlich waren Quads zu einer viel präziseren Steuerung und fortschrittlichen Funktionen fähig. Die Entwicklung war bemerkenswert:
• Frühe FCs (2010-2013): Grundlegende Stabilisierung mit begrenzten Funktionen. Builds mit einem MultiWii-Board erforderten ständige Aufmerksamkeit, nur um einen stabilen Flug aufrechtzuerhalten.
• 32-Bit-Revolution (2014-2016): Schnellere Verarbeitung und bessere Algorithmen. Der Naze32 war ein Wendepunkt - plötzlich fühlten sich Quads wie völlig andere Maschinen an.
• Moderne Ära (2017-heute): Leistungsstarke F4/F7-Prozessoren und integrierte Komponenten. Ich habe festgestellt, dass diese modernen Flugcontroller komplexe Filterung und hohe Loopraten bewältigen können, die selbst aggressives Freestyle-Fliegen butterweich anfühlen lassen.
• Nächste Generation (2023+): H7-Prozessoren mit Machine-Learning-Fähigkeiten und verbesserter Sensorfusion. Dies sind hochmoderne Controller, und der Unterschied in der Flugleistung ist subtil, aber spürbar, besonders unter schwierigen Bedingungen.
Diese Entwicklung hat zu kleineren, leistungsfähigeren Flugcontrollern mit zunehmend ausgefeilten Funktionen und Leistungen geführt. Ich erinnere mich noch an die Zeiten, als ein Flugcontroller die Größe einer Kreditkarte hatte - jetzt sind sie oft kleiner als eine Briefmarke, während sie weitaus mehr leisten.
Grundlegende Komponenten eines Flugcontrollers
Moderne Flugcontroller integrieren mehrere Schlüsselkomponenten, die zusammenarbeiten, um das Flugerlebnis zu schaffen. Lassen Sie mich Ihnen erklären, was ich über Jahre des Bauens und der Fehlerbehebung über diese Komponenten gelernt habe.
Mikroprozessor
Die zentrale Recheneinheit ist in der Regel ein STM32-Prozessor, und der Typ macht einen erheblichen Unterschied in der Leistung. Ich bin alles von F1- bis H7-Prozessoren geflogen, und hier ist, was ich herausgefunden habe:
• F1-Prozessoren: Ältere 32-Bit-Chips, die jetzt veraltet sind. Ich bin diese ein paar Mal zum Spaß geflogen, und während sie ihren Zweck erfüllten, waren die Einschränkungen frustrierend.
• F3-Prozessoren (72 MHz): Weitgehend veraltet, aber sie waren ein solider Schritt nach oben von F1. Ich flog einen F3-basierten Aufbau und es war eigentlich ziemlich befriedigend.
• F4-Prozessoren (168-216 MHz): Immer noch verbreitet und für die meisten Flugstile absolut geeignet. Ich verwende immer noch ein F4-Board in einem Ausbildungsaufbau, da sie eine gute Balance zwischen Leistung und Kosten bieten.
• F7-Prozessoren (216-400 MHz): Der aktuelle Standard, mit zusätzlicher Rechenleistung, die in anspruchsvollen Situationen spürbar ist. Als ich meinen Hauptfreestyle-Quad auf einen F7 umstellte, bemerkte ich sofort die verbesserte Handhabung komplexer Filterung und höherer Loop-Raten.
• H7-Prozessoren (400-480 MHz): Setzt sich als High-End-Option durch. Ich habe einen in meinem Rennaufbau getestet, und während die Unterschiede subtil sind, ist der Spielraum für zukünftige Funktionen beträchtlich.
Der Prozessor bestimmt die Rechenleistung des Flugcontrollers und beeinflusst seine Fähigkeit, komplexe Algorithmen auszuführen und hohe Loop-Zeiten beizubehalten. Ich habe gelernt, dass der Prozessor zwar nicht alles ist, aber er setzt die Obergrenze für das, was Ihr Flugcontroller erreichen kann.
Sensoren
Die Sensoren auf einem Flugcontroller sind für die Flugstabilität und die Implementierung von Funktionen unerlässlich. Ich bin schon mehr als einmal wegen Sensorproblemen abgestürzt, daher habe ich gelernt, diesem Aspekt große Aufmerksamkeit zu schenken.
• Gyroskop: Misst Rotationsraten um drei Achsen (Pitch, Roll, Gier). Dies ist der wichtigste Sensor, und ich habe festgestellt, dass die Qualität des Gyros einen spürbaren Unterschied in der Flugleistung ausmacht. Ein verrauschtes Gyro führt zu zuckenden, unvorhersehbaren Verhalten, das durch keine Abstimmung vollständig behoben werden kann.
• Beschleunigungsmesser: Misst die lineare Beschleunigung und ist entscheidend für den Winkelmodus. Ich benutze den Winkelmodus heutzutage selten, aber wenn ich einen Freund eine meiner Drohnen fliegen lasse, bin ich dankbar für einen gut kalibrierten Beschleunigungsmesser.
• Barometer: Misst den atmosphärischen Druck zur Höhenschätzung. Ich habe festgestellt, dass diese in Bezug auf die Zuverlässigkeit ein Glücksspiel sind – sie werden durch Propwash und wechselnde Wetterbedingungen beeinflusst. Für ernsthaftes Höhenhalten bevorzuge ich GPS.
• Magnetometer (Kompass): Bestimmt die Ausrichtung relativ zum magnetischen Norden. Meiner Erfahrung nach sind diese sehr anfällig für Störungen durch Stromversorgungssysteme und Motoren. Ich montiere sie immer so weit wie möglich von Stromleitungen entfernt.
• GPS: Liefert Positionsdaten für Navigationsfunktionen. Ich habe auf die harte Tour gelernt, dass nicht alle GPS-Module gleich sind – etwas mehr für ein Modul mit besserem Satellitenempfang auszugeben, hat mich davor bewahrt, Drohnen auf Langstreckenflügen zu verlieren. Siehe auch: Drohnen-GNSS-Technologie
Eingabe-/Ausgabe-Schnittstellen
Die Anschlüsse für Peripheriegeräte und andere Komponenten machen einen Flugcontroller vielseitig. Ich habe alles gebaut, von minimalistischen Rennquads bis hin zu komplexen Langstreckenmaschinen, und die verfügbaren Schnittstellen machen den ganzen Unterschied aus.
• UART-Ports: Bieten serielle Kommunikation mit Empfängern, GPS, Telemetrie usw. Ich habe festgestellt, dass mindestens 4-5 UARTs mir die Flexibilität geben, die ich für die meisten Builds benötige. Wenn die UARTs ausgehen, ist das frustrierend und erfordert oft Kompromisse.
• I2C-Bus: Ermöglicht die Kommunikation mit bestimmten Peripheriegeräten und Sensoren. Ich habe gemischte Erfahrungen mit I2C gemacht – es ist praktisch, kann aber anfällig für Störungen sein, wenn es nicht richtig implementiert ist.
• SPI-Bus: Bietet Hochgeschwindigkeitskommunikation mit Gyroskopen und anderen Geräten. Dies ist entscheidend für die Leistung, und ich habe festgestellt, dass Flugcontroller mit gut implementierten SPI-Bussen tendenziell sauberere Gyro-Signale haben.
• Motorausgänge: Verbinden sich mit ESCs zur Motorsteuerung. Der Trend zu DShot-Protokollen war in meiner Erfahrung ein Wendepunkt – die digitale Präzision beseitigt viele der Kalibrierungsprobleme, mit denen ich früher zu kämpfen hatte. Siehe auch: FPV-Drohnenmotoren und FPV-Drohnen-ESCs
• USB-Anschluss: Wird für Konfiguration und Firmware-Updates verwendet. Ich habe gelernt, die Qualität dieser Verbindung zu überprüfen – ein wackeliger USB-Anschluss ist oft das erste, was an einem Flugcontroller kaputt geht.
Stromversorgung
Die Stromversorgungsschaltung liefert sauberen, geregelten Strom, und ich habe gelernt, ihre Bedeutung nicht zu unterschätzen. Zu Beginn meiner FPV-Reise hatte ich mysteriöse Flugprobleme, die letztendlich auf Stromprobleme zurückzuführen waren.
• Spannungsregler: Wandeln die Batteriespannung in 5V und 3,3V für die Elektronik um. Ich habe festgestellt, dass hochwertige Regler einen erheblichen Unterschied in der Gesamtzuverlässigkeit des Systems ausmachen, insbesondere bei Hochleistungs-Builds.
• Filterkondensatoren: Glätten die Stromversorgung und reduzieren Störungen. Ich füge meinen Builds immer zusätzliche Kondensatoren hinzu – es ist eine günstige Versicherung gegen elektrische Störungen, die die Sensorwerte beeinflussen können.
• Schutzschaltungen: Verhindern Schäden durch Spannungsspitzen oder umgekehrte Polarität. Ich habe schon mehr als einen Flugcontroller gegrillt, indem ich eine Batterie rückwärts angeschlossen habe, daher achte ich jetzt auf Boards mit robustem Schutz.
Für detailliertere Informationen zur Stromversorgung Ihrer Drohne, siehe:
Überblick über Drohnen-Batterietypen und -Chemie
Flugcontroller-Hardware
Im Laufe der Jahre habe ich Dutzende verschiedener Flugcontroller in verschiedenen Builds verwendet und habe einige starke Meinungen darüber entwickelt, was für verschiedene Anwendungen am besten funktioniert.
Flugcontroller-Klassifizierungen
Nach Prozessortyp
Der Prozessor ist die gängigste Art, Flugcontroller zu klassifizieren, und ich habe festgestellt, dass die Wahl des richtigen Prozessors für Ihre Bedürfnisse entscheidend ist.
F4-Flugcontroller (168-216 MHz) bieten eine gute Balance zwischen Leistung und Kosten. Ich verwende diese in den meisten meiner Builds, da sie für alle außer den anspruchsvollsten Anwendungen ausreichen. Der Betaflight F4, Matek F405 und iFlight SucceX-E F4 haben mir alle gute Dienste geleistet.
F7-Flugcontroller (216-400 MHz) bieten mehr UARTs und Funktionen. Ich verwende diese in Builds, bei denen ich mehrere Peripheriegeräte anschließen muss oder die bestmögliche Filterleistung wünsche. Der Matek F722, SpeedyBee F7 und iFlight SucceX-E F7 gehören zu meinen Favoriten.
H7-Flugcontroller (400-480 MHz) repräsentieren mit maximaler Verarbeitungskapazität den neuesten Stand der Technik. Ich habe den SpeedyBee H7 und Matek H743 getestet, und während die Leistungsverbesserungen gegenüber F7 subtil sind, sind sie definitiv zukunftssicher für fortschrittliche Funktionen.
Nach Formfaktor
Flugcontroller gibt es in standardisierten Montagemustern, und die Wahl der richtigen Größe ist entscheidend für Ihren Aufbau.
Standardmontage (30,5×30,5 mm) ist die häufigste Größe für 5-Zoll- und größere Builds. Ich verwende diese in den meisten meiner Freestyle- und Langstrecken-Quads, da sie die meisten Funktionen und Anschlussmöglichkeiten bieten.
20×20-mm-Montage ist bei 3-Zoll- und kleineren Builds üblich. Ich habe festgestellt, dass diese kleineren Boards in Bezug auf Funktionen einen langen Weg zurückgelegt haben, obwohl Sie in der Regel weniger UARTs und Anschlussoptionen haben.
16×16-mm-Montage wird in Micro-Builds und Tiny Whoops verwendet. Diese sind unglaublich kompakt, und ich bin immer wieder erstaunt, wie viel Funktionalität die Hersteller in einem so kleinen Raum unterbringen können.
AIO (All-In-One) kombiniert den FC mit anderen Komponenten wie ESCs. Ich habe gelernt, diese für bestimmte Builds zu schätzen – sie vereinfachen die Verkabelung und können das Gewicht reduzieren, obwohl sie ein Single Point of Failure sind.
Nach Feature-Integration
Moderne Flugsteuerungen integrieren oft zusätzliche Komponenten, und ich habe festgestellt, dass die Wahl des richtigen Integrationsgrades den Aufbau erheblich erleichtern kann.
Nur FC-Boards bieten lediglich die Flugsteuerungsfunktionalität. Ich verwende diese immer noch in den meisten meiner Builds, bei denen ich maximale Flexibilität bei der Komponentenauswahl möchte.
FC+PDB-Kombinationen beinhalten die Stromverteilung. Diese sparen Platz und vereinfachen die Verkabelung.
FC+ESC (4-in-1)-Stacks kombinieren den FC mit ESCs. Sie reduzieren die Bauzeit drastisch und schaffen ein saubereres, zuverlässigeres Setup.
FC+ESC+VTX-All-in-One-Lösungen enthalten den Videosender. Ich habe gemischte Erfahrungen mit diesen gemacht – sie sind praktisch, können aber heiß laufen, und wenn eine Komponente ausfällt, muss man alles ersetzen.
FC+ESC+VTX+RX-Komplettflugstacks enthalten den Empfänger. Diese bieten maximale Integration, und obwohl ich anfangs skeptisch war, funktionieren einige der neueren Implementierungen überraschend gut.
Wichtige Hardware-Funktionen, die es zu beachten gilt
Bei der Auswahl einer Flugsteuerung habe ich gelernt, auf mehrere Hardware-Funktionen zu achten, die das Flugerlebnis entscheidend beeinflussen können.
UART-Anzahl und Verfügbarkeit
UARTs sind serielle Schnittstellen zur Verbindung von Peripheriegeräten, und ich habe festgestellt, dass eine ausreichende Anzahl für Flexibilität entscheidend ist.
Ich betrachte 3 UARTs als absolutes Minimum (Empfänger, Telemetrie und ein Ersatz). Ich habe Quads mit nur 3 UARTs gebaut, aber es fühlt sich immer einschränkend an.
4-5 UARTs bieten ein komfortables Setup für die meisten Builds. Das gibt mir genügend Anschlüsse für einen Empfänger, Telemetrie, GPS und vielleicht Kamerasteuerung oder LED-Steuerung.
6+ UARTs bieten maximale Flexibilität für komplexe Setups. Meine Long-Range-Builds verwenden typischerweise so viele Verbindungen für verschiedene Peripheriegeräte und Backup-Systeme.
Ich habe auf die harte Tour gelernt, dass nicht alle UARTs gleich sind – manche können mit anderen Funktionen geteilt werden oder Einschränkungen haben. Immer die Dokumentation sorgfältig prüfen.
Gyroskop-Typ und Implementierung
Das Gyroskop ist entscheidend für die Flugleistung, und ich habe aufgrund jahrelanger Tests starke Präferenzen entwickelt.
Die MPU6000-Serie-Gyroskope sind zuverlässig mit einem niedrigeren Rauschpegel. Ich bevorzuge diese für Racing-Builds, bei denen jedes bisschen Leistung zählt. Sie sind auf neueren Boards schwerer zu finden, aber immer noch meine erste Wahl, wenn verfügbar.
ICM20602/ICM20689-Gyroskope bieten gute Leistung und sind in modernen FCs verbreitet. Ich habe festgestellt, dass sie für die meisten Flugstile völlig ausreichend sind, obwohl sie etwas anfälliger für Rauschen sind als der MPU6000.
Der BMI270 ist ein neuerer Sensor mit hervorragender Leistung. Ich war beeindruckt von seiner Rauschbehandlung in meinen jüngsten Builds, und er scheint sich zum neuen Standard zu entwickeln.
Auch die Montagemethode ist wichtig – soft-mounted vs. hard-mounted Gyroskope gehen unterschiedlich mit Vibrationen um. Ich bevorzuge Flugsteuerungen mit gut isolierten Gyroskopen, da sie weniger von den Vibrationen beeinflusst werden, die bei Hochleistungs-Quads unvermeidlich sind.
Stromstärkesensor-Bewertung
Für Builds mit integrierter Stromerfassung ist die Wahl der richtigen Bewertung für ein genaues Batteriemanagement wichtig.
Racing-Drohnen benötigen typischerweise eine Bewertung von 30-60A. Ich habe festgestellt, dass eine zu hohe Bewertung die Auflösung und Genauigkeit für diese leichteren Builds reduziert.
Freestyle-Drohnen funktionieren am besten mit einer Bewertung von 50-100A. Meine Freestyle-Builds können bei aggressiven Manövern einen erheblichen Strom ziehen, daher ist Spielraum wichtig.
Long-Range- und Cinematic-Setups benötigen im Allgemeinen eine Bewertung von 40-80A. Diese Builds neigen zu einem gleichmäßigeren Stromverbrauch, sodass Genauigkeit wichtiger ist als extreme Reichweite.
Die Auflösung (Bittiefe) liefert präzisere Messwerte. Ich habe festgestellt, dass Stromsensoren mit höherer Auflösung einen spürbaren Unterschied in der Genauigkeit meiner Batteriewarnungen und Telemetriedaten machen.
Blackbox-Aufzeichnung
Für Logging und Tuning ist die Blackbox-Funktion unerlässlich, und ich habe je nach Build verschiedene Ansätze verwendet.
Onboard-Flash (normalerweise 8-16MB) ist praktisch, aber in der Kapazität begrenzt. Ich verwende dies für schnelle Tuning-Sitzungen, aber es füllt sich bei hohen Logging-Raten schnell.
SD-Kartensteckplätze bieten eine viel größere Speicherkapazität, erhöhen aber die Komplexität. Für ernsthafte Tuning-Arbeiten bevorzuge ich Flugsteuerungen mit SD-Kartenunterstützung – die Möglichkeit, ganze Flüge mit hohen Raten zu protokollieren, ist unschätzbar wertvoll.
Einige FCs haben keinen Speicher und erfordern einen externen Logger für Blackbox-Daten. Ich vermeide diese wenn möglich, da der externe Logger Gewicht und Komplexität hinzufügt.
Zusätzliche Hardware-Funktionen
Im Laufe der Jahre habe ich mehrere andere Funktionen schätzen gelernt, die das Flugerlebnis verbessern.
Eingebautes OSD (On-Screen-Display) für den FPV-Feed ist etwas, das ich inzwischen für unverzichtbar halte. Die Möglichkeit, Batteriespannung, Flugzeit und andere kritische Informationen während des Fluges zu sehen, hat viele meiner Drohnen vor Abstürzen oder Batterieschäden bewahrt.
Ein Barometer für den Höhenstand kann in bestimmten Situationen nützlich sein. Ich verwende diese Funktion nicht oft, aber beim Filmen von Cinematic-Aufnahmen ist ein zuverlässiger Höhenstand wertvoll.
LED-Steuerausgänge für LED-Streifen erleichtern das Nachtfliegen und die Drohnenidentifikation. Ich habe mich daran gewöhnt, adressierbare LEDs auf meinen Builds zu haben – sie sind nicht nur zur Schau, sie sind wirklich nützlich für die Orientierung und Statusanzeige.
Summer-Ausgänge zum Auffinden abgestürzter Drohnen haben mir stundenlange Suche erspart. Ich baue jetzt nie mehr einen Quad ohne Summer – es ist zu einfach, eine dunkle Drohne in hohem Gras oder Bäumen aus den Augen zu verlieren.
Kamerasteuerung zum Anpassen der Kameraeinstellungen während des Fluges ist ein Luxus, den ich schätzen gelernt habe. Die Möglichkeit, Belichtung oder andere Einstellungen ohne Landung anzupassen, ist besonders nützlich bei wechselnden Lichtverhältnissen.
Flugsteuerungs-Firmware
Die Firmware ist die Software, die auf der Flugsteuerungs-Hardware läuft und deren Fähigkeiten und Verhalten bestimmt. Ich habe die meisten der verfügbaren Optionen ausprobiert, und jede hat ihre Stärken und Schwächen.
Wichtige Firmware-Optionen
Es sind mehrere Firmware-Optionen verfügbar, und ich habe Zeit mit jeder von ihnen verbracht, um ihre einzigartigen Eigenschaften zu verstehen.
Betaflight
Betaflight ist die beliebteste Firmware für FPV-Drohnen und wird von mir in den meisten meiner Builds verwendet. Sie konzentriert sich auf Racing- und Freestyle-Performance mit hervorragenden Flugeigenschaften und aktiver Entwicklung.
Die Stärken von Betaflight sind seine herausragende Flugleistung, die aktive Entwickler-Community und die große Nutzerbasis. Wenn ich ein Problem mit Betaflight habe, finde ich normalerweise jemanden, der es bereits gelöst hat.
Zu den Schwächen gehören begrenzte autonome Funktionen und eine steilere Lernkurve. Ich habe unzählige Stunden im Betaflight Configurator verbracht, um Einstellungen anzupassen, was für Neulinge abschreckend sein kann.
Betaflight ist am besten für Rennen, Freestyle und allgemeines FPV-Fliegen geeignet. Wenn Sie in erster Linie an akrobatischem Flug oder Rennen interessiert sind, ist es schwer zu schlagen.
INAV
INAV konzentriert sich auf Navigations- und autonome Funktionen, und ich verwende es für meine Long-Range- und Mapping-Builds. Die GPS-Modi, Return-to-Home und Wegpunkt-Fähigkeiten sind hervorragend.
Die Stärken von INAV sind seine umfassenden Navigationsfunktionen und der zuverlässige autonome Flug. Ich hatte schon INAV, das Drohnen aus Kilometern Entfernung zurückbrachte, als ich das Videosignal verloren hatte.
Zu den Schwächen gehört, dass es weniger für reines Performance-Fliegen optimiert ist. Während INAV seine Acro-Leistung verbessert hat, erreicht es immer noch nicht ganz das Niveau von Betaflight für Rennen oder Freestyle.
INAV ist am besten für Langstreckenflüge, Kartierung und autonome Missionen geeignet. Wenn Sie sich eher für Erkundung als für Akrobatik interessieren, lohnt es sich, INAV in Betracht zu ziehen.
KISS
KISS verfolgt einen vereinfachten Ansatz mit Schwerpunkt auf sauberem Code. Ich habe KISS bei einigen Builds verwendet, und die Einfachheit ist erfrischend.
Zu den Stärken von KISS gehören die einfache Einrichtung und gute Flugeigenschaften von Anfang an. Ich war beeindruckt, wie wenig Tuning nötig war, um eine KISS-betriebene Drohne gut fliegen zu lassen.
Zu den Schwächen gehören, dass es Closed Source ist und nur begrenzte Hardware-Optionen bietet. Das Ökosystem ist kleiner, was bedeutet, dass es weniger Ressourcen gibt, wenn Probleme auftreten.
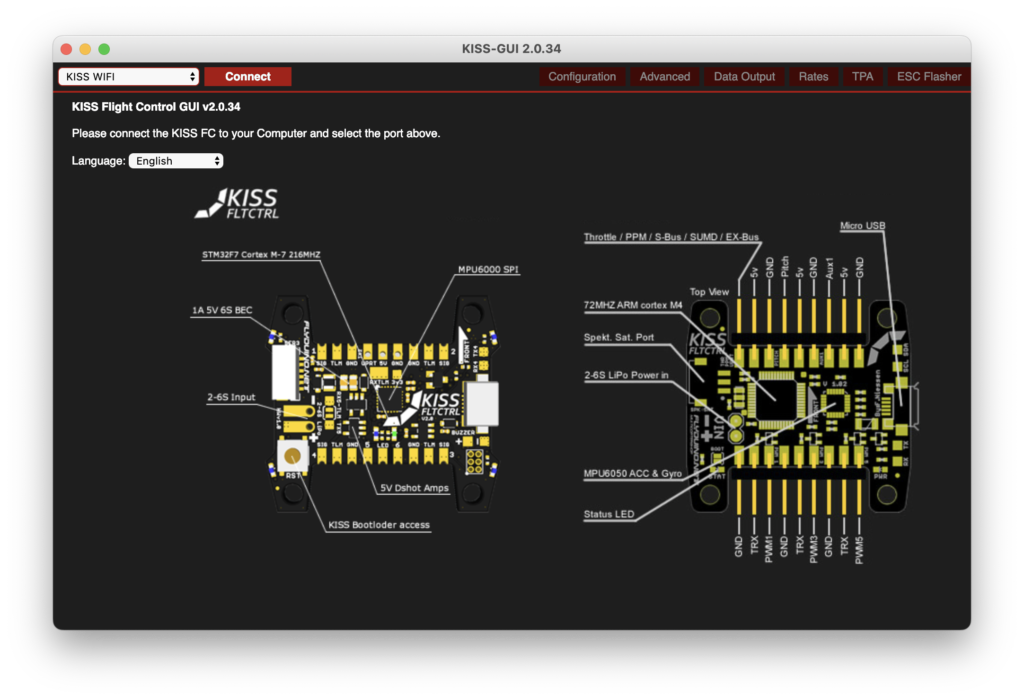
KISS ist am besten für Piloten geeignet, die Einfachheit mit guter Leistung suchen. Wenn Sie mehr Zeit mit Fliegen und weniger mit Konfigurieren verbringen möchten, lohnt sich ein Blick auf KISS.
Emuflight
Emuflight ist ein Fork von Betaflight mit alternativen Ansätzen zur Flugsteuerung. Ich habe damit bei ein paar Builds experimentiert, insbesondere für Cinematic Flying.
Zu den Stärken von Emuflight gehören das einzigartige Flugverhalten und die gute Leistung für bestimmte Flugstile. Ich fand es besonders gut für sanften, fließenden Freestyle.
Zu den Schwächen gehören eine kleinere Community und weniger häufige Updates. Wenn Probleme auftreten, stehen im Vergleich zu Betaflight weniger Ressourcen zur Verfügung.
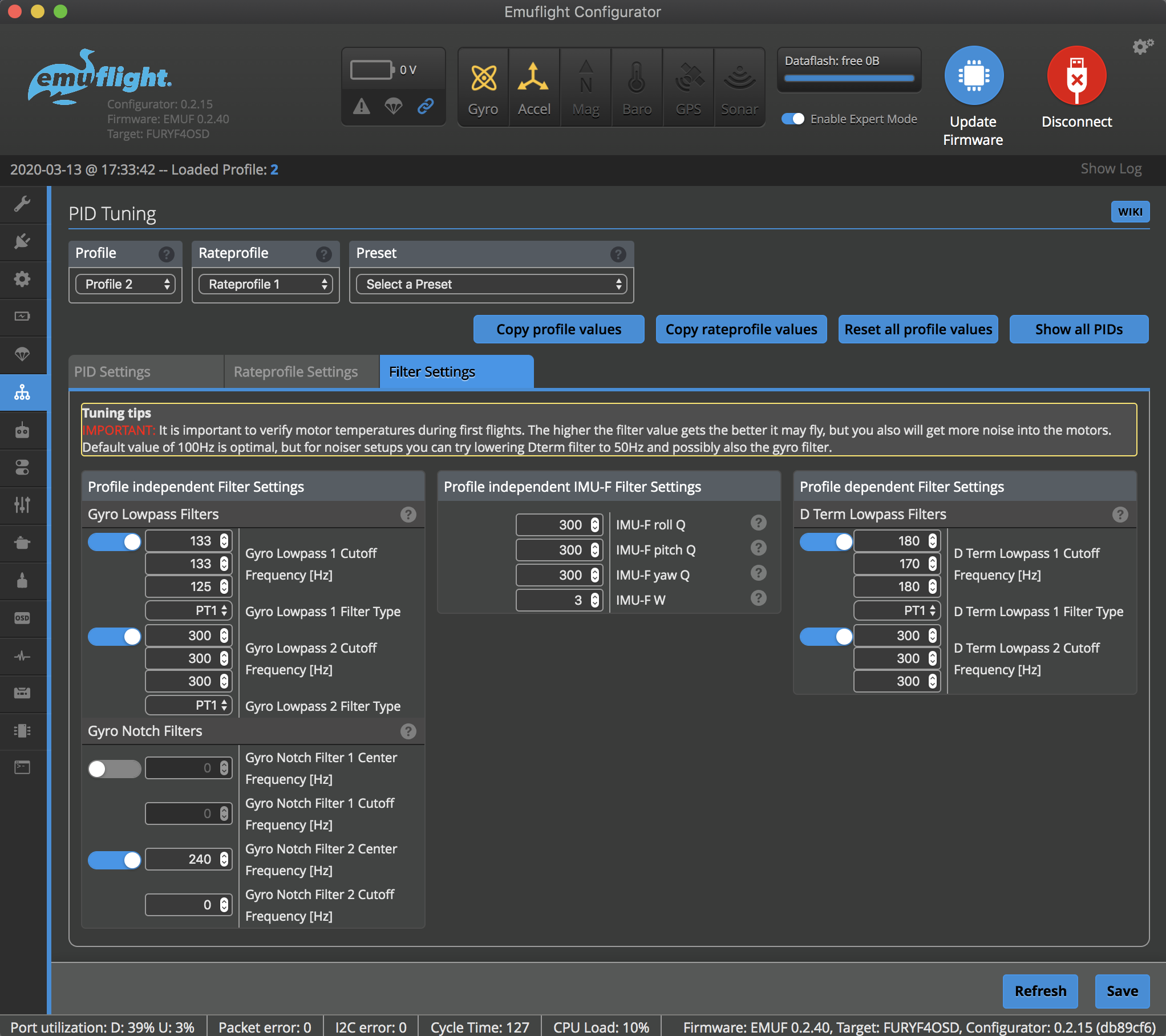
Emuflight ist am besten für Piloten geeignet, die bestimmte Flugeigenschaften suchen, insbesondere für diejenigen, die Sanftheit über absolute Reaktionsfähigkeit stellen.
Ardupilot/PX4
Ardupilot und PX4 sind professionelle Open-Source-Autopilot-Systeme. Ich habe diese für anspruchsvollere Kartierungs- und Vermessungsarbeiten verwendet.
Zu den Stärken dieser Systeme gehören umfassende Missionsplanung und professionelle Funktionen. Die autonomen Fähigkeiten übersteigen bei weitem das, was in anderen Firmware-Optionen verfügbar ist.
Zu den Schwächen gehören die komplexe Einrichtung und die geringere Optimierung für Agilität. Das sind keine Systeme, die ich für Freestyle oder Rennen wählen würde.
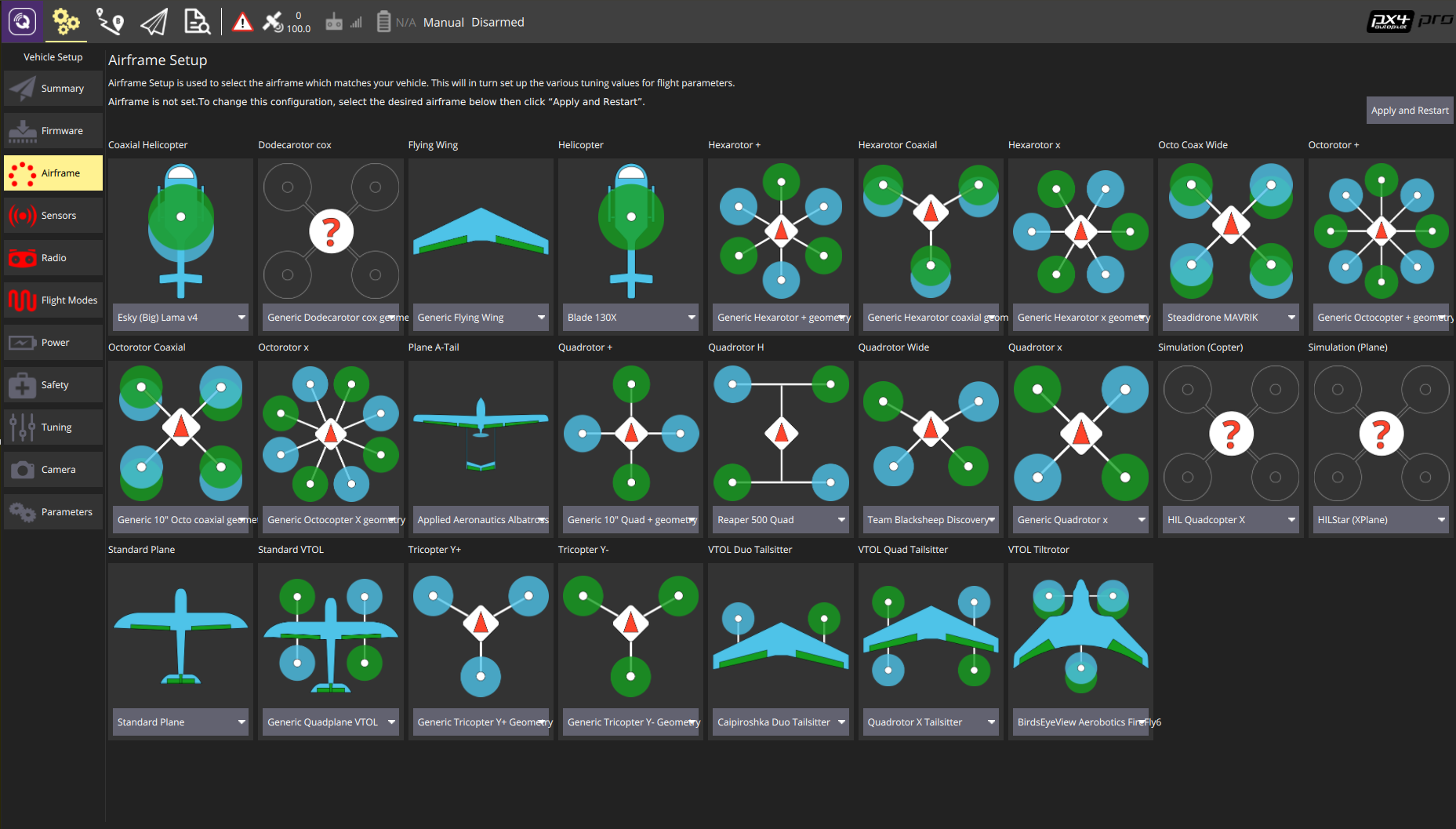
Ardupilot und PX4 sind am besten für Kartierung, Vermessungsarbeiten und professionelle Anwendungen geeignet, bei denen Zuverlässigkeit und autonome Fähigkeiten wichtiger sind als Agilität.
Vergleich der Firmware-Funktionen
Durch meine Erfahrung mit diesen verschiedenen Firmware-Optionen habe ich ein Gefühl für ihre relativen Stärken in verschiedenen Bereichen entwickelt:
| Funktion | Betaflight | INAV | KISS | Emuflight | Ardupilot |
|---|---|---|---|---|---|
| Acro-Modus | ★★★★★ | ★★★★☆ | ★★★★★ | ★★★★★ | ★★★☆☆ |
| GPS-Modi | ★★☆☆☆ | ★★★★★ | ★★☆☆☆ | ★★☆☆☆ | ★★★★★ |
| OSD-Optionen | ★★★★☆ | ★★★★☆ | ★★★☆☆ | ★★★★☆ | ★★★☆☆ |
| Einfachheit des Setups | ★★★☆☆ | ★★☆☆☆ | ★★★★★ | ★★★☆☆ | ★☆☆☆☆ |
| Community-Unterstützung | ★★★★★ | ★★★★☆ | ★★★☆☆ | ★★★☆☆ | ★★★★☆ |
| Aktualisierungshäufigkeit | ★★★★★ | ★★★★☆ | ★★☆☆☆ | ★★★☆☆ | ★★★★☆ |
| Hardware-Optionen | ★★★★★ | ★★★★☆ | ★★☆☆☆ | ★★★★☆ | ★★★☆☆ |
Die richtige Flugsteuerung auswählen
Die Wahl der passenden Flugsteuerung hängt von Ihren spezifischen Anforderungen und Bauanforderungen ab. Nachdem ich Dutzende verschiedener Drohnen gebaut habe, habe ich einige Richtlinien für verschiedene Anwendungen entwickelt.
Für Renndrohnen
Beim Bau von Renndrohnen lege ich Wert auf Leistung, Zuverlässigkeit und Einfachheit. Jedes Gramm zählt und unnötige Funktionen erhöhen nur das Gewicht.
Ich empfehle einen F4- oder F7-Prozessor für hohe Loop-Raten. Während F7 mehr Rechenleistung hat, verwenden viele Top-Racer immer noch F4-Boards, da sie leichter sind und die Anforderungen an Rennen perfekt erfüllen können.
Für den Gyro bevorzuge ich die MPU6000-Serie oder ICM20602 für Zuverlässigkeit. Ein sauberes Gyro-Signal ist für Rennen entscheidend, bei denen kleine Störungen das Handling bei hohen Geschwindigkeiten beeinflussen können.
Der Formfaktor sollte 20×20mm für kompakte Builds oder 30,5×30,5mm für Standard-Builds betragen. Ich habe die meisten meiner Rennbauten auf 20×20mm umgestellt, um Gewicht und Platz zu sparen.
In Bezug auf die Integration schafft ein FC+ESC-Stack saubere Builds mit minimaler Verkabelung. Dies reduziert das Gewicht und die Möglichkeit von Verkabelungsfehlern, die bei Rennabstürzen häufig vorkommen.
Für die Firmware verwende ich ausschließlich Betaflight, das für Rennen optimiert ist. Die Standardeinstellungen sind viel besser geworden, aber ich nehme immer noch Anpassungen für meinen spezifischen Flugstil vor.
Einige Beispiele für Flugsteuerungen, mit denen ich beim Rennen Erfolg hatte, sind der iFlight SucceX-E F4/F7, T-Motor F7 und SpeedyBee F4/F7.
Für Freestyle-Drohnen
Bei Freestyle-Drohnen lege ich Wert auf Zuverlässigkeit, einen umfassenden Funktionsumfang und Leistung. Diese Builds nehmen mehr Missbrauch als alle anderen, daher ist Haltbarkeit der Schlüssel.
Ich empfehle einen F7-Prozessor für bessere Filterung und Funktionen. Die zusätzliche Rechenleistung hilft bei komplexer Filterung, die für die hohen Leistungs-Gewichts-Verhältnisse wichtig ist, die bei Freestyle-Builds üblich sind.
Der Gyro sollte für ein sauberes Signal gut isoliert sein. Freestyle beinhaltet Hochleistungsmanöver, die viele Vibrationen erzeugen, sodass eine gute Isolierung einen großen Unterschied macht.
Ein genauer Stromsensor ist wichtig für das Batteriemanagement. Freestyle-Fliegen kann schnelle Änderungen des Leistungsbedarfs beinhalten, daher ist es wichtig, den Batteriestatus zu kennen.
Blackbox-Fähigkeit über On-Board-Flash oder SD-Karte ist für das Tuning unerlässlich. Ich habe festgestellt, dass richtiges Tuning einen massiven Unterschied in der Freestyle-Leistung macht, und Blackbox-Daten sind der Schlüssel zu gutem Tuning.
Ein voll ausgestattetes OSD liefert wichtige Informationen während des Fluges. Ich verlasse mich auf mein OSD, um mir zu sagen, wann es Zeit zum Landen ist, was leicht zu vergessen ist, wenn man Spaß mit Freestyle-Tricks hat.
Flugsteuerungen, mit denen ich gute Erfahrungen für Freestyle gemacht habe, sind der Matek F722-SE, Holybro Kakute F7 und Diatone Mamba F722.
Für Langstrecken-/Kinematische Drohnen
Für Langstrecken- und Kinoanwendungen lege ich Wert auf Zuverlässigkeit, GPS-Funktionen und Energieeffizienz. Diese Builds müssen vertrauenswürdig sein, wenn sie weit weg von zu Hause fliegen.
Ich empfehle einen F7-Prozessor für die Handhabung von GPS und anderen Peripheriegeräten. Die zusätzlichen UARTs und die Rechenleistung sind wertvoll für die mehreren Systeme, die typischerweise in Langstrecken-Builds zu finden sind.
Ein Barometer ist nützlich für Höhenhalte- und verwandte Funktionen. Beim Fliegen in großer Entfernung sind zuverlässige Höheninformationen für Navigation und Batteriemanagement wichtig.
Mehrere UARTs werden für GPS, Telemetrie, Kamerasteuerung usw. benötigt. Meine Langstrecken-Builds verwenden typischerweise mindestens 5-6 UARTs für verschiedene Systeme.
Die Unterstützung der INAV-Firmware ist wichtig für Navigationsfunktionen. Während Betaflight über grundlegende GPS-Funktionen verfügt, ist INAV für ernsthafte Navigationsaufgaben weit überlegen.
Saubere Stromfilterung ist für längere Flugzeiten unerlässlich. Beim Langstreckenfliegen geht es um Effizienz, und sauberer Strom hilft, die Flugzeit zu maximieren.
Flugsteuerungen, die mir für diese Anwendungen gut gedient haben, sind der Matek F765-WING, Holybro Kakute H7 und iFlight Beast H7.
Für Micro-Builds
Beim Bau von Micro-Drohnen lege ich Wert auf Größe, Gewicht und Integration. Jede Komponente muss so klein und leicht wie möglich sein.
Der Formfaktor sollte 16×16mm oder 20×20mm betragen, um in kompakte Rahmen zu passen. Ich war erstaunt, wie leistungsfähig diese winzigen Flugsteuerungen geworden sind.
AIO-Designs mit integrierten ESCs vereinfachen den Aufbau und sparen Platz. In den kleinsten Builds sind separate Komponenten einfach nicht praktisch.
Ultraleichte Komponenten sind für eine gute Flugleistung unerlässlich. Eine schwere Flugsteuerung in einem Micro-Build wirkt sich spürbar auf die Handhabung aus.
Ein vereinfachtes Design mit nur wesentlichen Funktionen hilft, das Gewicht zu minimieren. Funktionen wie Barometer und zusätzliche UARTs werden oft weggelassen, um Gewicht zu sparen.
Flugsteuerungen, die ich erfolgreich in Micro-Builds verwendet habe, sind der HGLRC Zeus F4/F7 AIO, BetaFPV F4 AIO und NamelessRC F4/F7 AIO.
Für Anfänger
Für Anfänger empfehle ich, Benutzerfreundlichkeit, Haltbarkeit und Preis-Leistungs-Verhältnis in den Vordergrund zu stellen. Ihre ersten Builds werden wahrscheinlich häufiger abstürzen, daher ist Widerstandsfähigkeit wichtig.
Ein F4-Prozessor reicht zum Lernen aus. Während F7 mehr Funktionen bietet, bietet ein F4-Board alles, was ein Anfänger zu einem niedrigeren Preis benötigt.
Schutzfunktionen wie Conformal Coating und robustes Design helfen, Abstürze zu überleben. Ich empfehle Anfängern immer, zusätzliches Conformal Coating auf ihre Flugsteuerungen aufzutragen – es ist eine günstige Versicherung gegen versehentliche Kurzschlüsse.
Gute Dokumentation und Support-Ressourcen erleichtern die Lernkurve. Einige Hersteller bieten eine viel bessere Dokumentation als andere, was einen großen Unterschied macht, wenn man lernt.
Betaflight-Firmware mit guten Standardeinstellungen ermöglicht Erfolg ohne umfangreiches Tuning. Die Standardeinstellungen haben sich in den letzten Jahren dramatisch verbessert, sodass es für Anfänger viel einfacher ist, eine gute Flugleistung zu erzielen.
Budgetfreundliche Optionen bieten ein gutes Preis-Leistungs-Verhältnis ohne übermäßige Funktionen. Es ist nicht nötig, zusätzlich für Funktionen zu bezahlen, die Sie beim Lernen nicht nutzen werden.
Flugsteuerungen, die ich Anfängern oft empfehle, sind der iFlight SucceX-E F4, Matek F405-STD und JHEMCU GHF411.
Installation und Einrichtung der Flugsteuerung
Eine ordnungsgemäße Installation und Konfiguration ist entscheidend für eine optimale Leistung. Ich habe in diesem Bereich jeden möglichen Fehler gemacht, daher habe ich gelernt, was funktioniert und was nicht.
Hardware-Installation
Montageüberlegungen
Die Ausrichtung Ihrer Flugsteuerung ist entscheidend – der Pfeil sollte nach vorne zeigen, oder Sie können eine andere Ausrichtung in der Software konfigurieren. Ich habe gelernt, dies vor jedem Jungfernflug doppelt zu überprüfen, da es ein leicht zu machender Fehler ist.
Die Vibrationsisolierung durch weiche Montage mit Gummitüllen oder Schaumstoffband macht einen erheblichen Unterschied in der Flugleistung. Ich verwende jetzt bei allen meinen Builds eine weiche Montage – die Verbesserung der Gyro-Daten ist bemerkenswert.
Für detailliertere Informationen zur Vibrationsisolierung, siehe:
Drohnen-Vibrationsdämpfung
Die Position sollte im Schwerpunkt und geschützt vor Abstürzen sein. Ich versuche, den Flugcontroller in der Mitte des Rahmens zu positionieren, sowohl für die Balance als auch für maximalen Schutz.
Der Zugang zum USB-Anschluss ist wichtig für Konfiguration und Updates. Ich habe Quads gebaut, bei denen ich sie teilweise zerlegen musste, um USB anzuschließen – kein Fehler, den ich wiederholen werde.
Ausreichender Luftstrom zur Kühlung der Elektronik verhindert Überhitzungsprobleme. Flugcontroller können ziemlich warm werden, besonders wenn sie eng an ESCs und Videosendern gepackt sind.
Best Practices für die Verkabelung
Saubere Verlegung von Kabeln weg von empfindlichen Komponenten reduziert Störungen. Ich habe festgestellt, dass das Fernhalten von Signalleitungen von Stromleitungen einen spürbaren Unterschied in der Leistung macht.
Sichere Verbindungen durch ordnungsgemäßes Löten oder hochwertige Steckverbinder verhindern Ausfälle. Ich hatte zu viele Abstürze durch schlechte Verbindungen, um hier noch Abkürzungen zu nehmen.
Zugentlastung verhindert Spannung auf Lötverbindungen und Steckverbinder. Ein kleiner Kabelbinder oder ein Klecks Heißkleber kann Sie vor frustrierenden intermittierenden Problemen bewahren.
Die Trennung von Signalleitungen von Stromleitungen reduziert Rauschen. Ich versuche immer, Signalleitungen auf der gegenüberliegenden Seite des Stacks von Stromleitungen zu verlegen.
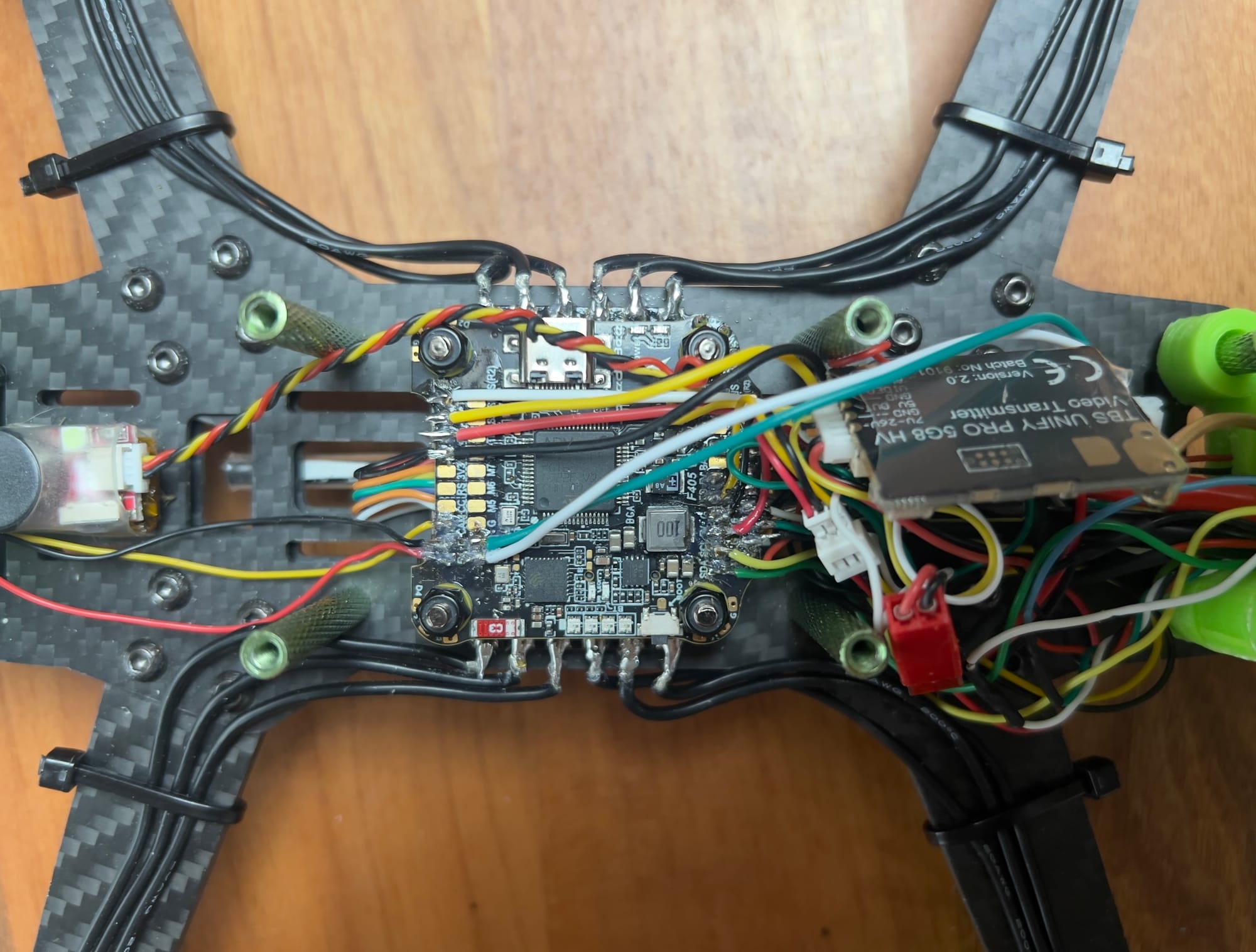
Minimierung der Kabellänge reduziert Rauschen und Gewicht. Ich schneide alle Kabel auf die exakt benötigte Länge – keine zusätzlichen Schlaufen oder Durchhänge.
Für detailliertere Informationen zur Verkabelung, siehe:
Drohnen-Verkabelungsanleitung
Softwarekonfiguration
Ersteinrichtungsprozess
Der Einrichtungsprozess folgt einer logischen Abfolge, die ich über viele Builds verfeinert habe:
- Konfigurator-Software installieren: Ich behalte separate Versionen für verschiedene Firmware-Zweige, um Kompatibilitätsprobleme zu vermeiden.
- FC anschließen: Verwenden Sie ein hochwertiges USB-Kabel, das Datenübertragung unterstützt. Ich habe viele mysteriöse Verbindungsprobleme auf billige oder beschädigte USB-Kabel zurückgeführt.
- Firmware flashen: Auf die neueste stabile Version aktualisieren. Ich vermeide normalerweise bleeding-edge Releases für Builds, auf die ich angewiesen bin – Stabilität ist wichtiger als die neuesten Funktionen.
- Grundkonfiguration:
• Korrekte Board-Ausrichtung einstellen
• UARTs für Peripheriegeräte konfigurieren
• Empfängerprotokoll einrichten
• Batterieüberwachung konfigurieren - Empfänger-Setup:
• Empfänger an Sender binden
• Kanalmapping überprüfen
• Failsafe-Verhalten einrichten (Ich teste das immer vor dem ersten Flug – es hat mich mehr als einmal vor Wegflügen bewahrt) - Motorkonfiguration:
• Motordrehrichtung überprüfen (immer mit abgenommenen Props!)
• ESC-Protokoll einrichten (DShot600 ist meine Empfehlung für die meisten Builds)
• Auf ungewöhnliche Geräusche oder Vibrationen prüfen - Flugmodus-Setup:
• Arm-Schalter konfigurieren
• Zusätzliche Flugmodi einrichten
• Ich verwende ein konsistentes Schalterlayout für alle meine Modelle, um Verwirrung zu vermeiden - OSD-Konfiguration:
• On-Screen-Display-Elemente anpassen
• Elemente für Sichtbarkeit positionieren
• Warnungen und Alarme einrichten - PID-Tuning:
• Mit Standardwerten oder Voreinstellungen beginnen
• Nach Bedarf nach den ersten Flügen feinabstimmen
Häufige Einrichtungsprobleme und Lösungen
Im Laufe der Jahre bin ich auf unzählige Einrichtungsprobleme gestoßen und habe sie gelöst. Hier sind einige der häufigsten Probleme und ihre Lösungen:
Keine Verbindung zum Konfigurator
Wenn sich Ihr Flugcontroller nicht mit dem Konfigurator verbinden lässt, kann das unglaublich frustrierend sein. Ich habe mehrere mögliche Ursachen gefunden:
• Falsche/Fehlende Treiber: Oft der Übeltäter. Ich habe gelernt, eine Sammlung von Treibern für verschiedene Flugcontroller zu pflegen, da besonders Windows pingelig sein kann.
• Beschädigte USB-Anschlüsse/Kabel: Verursachen mysteriöse Verbindungsprobleme. Ich verwende jetzt hochwertige USB-Kabel und habe ein spezielles "bekannt gutes" Kabel zur Fehlerbehebung.
• Bootloader-Modus-Probleme: Manchmal bleibt der Flugcontroller im Bootloader-Modus hängen. Ich habe eine Routine entwickelt, die Boot-Pins kurzzuschließen und den Strom ein- und auszuschalten, um ihn in den richtigen Modus zu zwingen.
• Falscher COM-Port: Ein einfacher Fehler, der leicht passieren kann. Ich überprüfe immer den Geräte-Manager, um zu bestätigen, welchen Port der Flugcontroller verwendet.
Motoren drehen in die falsche Richtung
Wenn Motoren in die falsche Richtung drehen, ist das ein häufiges Problem mit einfachen Lösungen:
• Motordrähte tauschen: Sie können zwei beliebige Motordrähte tauschen, um die Richtung umzukehren. Ich habe das unzählige Male gemacht, obwohl es Umlöten erfordert.
• BLHeli-Konfiguration: Die Verwendung des BLHeli-Konfigurators zum Umkehren der Motordrehrichtung ist einfacher, wenn Sie BLHeli-ESCs verwenden. Das ist meine bevorzugte Methode, da sie keine Hardwareänderungen erfordert.
• Überprüfung vor dem Flug: Überprüfen Sie immer die Motorreihenfolge und -richtung im Konfigurator vor dem ersten Flug. Ich habe mehr als einen Quad abgestürzt, weil ich diesen Schritt übersprungen habe.
Instabiles Flugverhalten
Wenn Ihr Quad nicht richtig fliegt, gibt es mehrere mögliche Ursachen:
• Falsche FC-Ausrichtung: Ein häufiger Übeltäter. Ich habe einmal stundenlang erratisches Verhalten gesucht, nur um festzustellen, dass ich den Flugcontroller um 90 Grad gegenüber der Konfiguration in der Software gedreht hatte.
• Vibrationsprobleme: Können alle möglichen seltsamen Verhaltensweisen verursachen. Ich bin zu einem starken Verfechter einer ordnungsgemäßen Vibrationsisolierung geworden, nachdem ich den dramatischen Unterschied gesehen habe, den sie in der Flugleistung macht.
• PID-Tuning-Probleme: Manifestieren sich oft als Oszillationen oder träge Reaktion. Im Zweifelsfall setze ich auf Standard-PIDs zurück und fange neu an.
• Gyro-Rauschen: Kann zuckiges, unvorhersehbares Verhalten verursachen. Ich habe festgestellt, dass richtige Filtereinstellungen und eine gute Hardware-Isolierung einen erheblichen Unterschied machen.
Empfänger nicht erkannt
Wenn Ihr Empfänger nicht mit Ihrem Flugcontroller kommuniziert, überprüfen Sie diese häufigen Probleme:
• Falsche UART-Zuweisung: Das häufigste Problem. Ich überprüfe immer doppelt, an welchen UART der Empfänger angeschlossen ist und stelle sicher, dass er im Ports-Tab richtig konfiguriert ist.
• Falsches Empfängerprotokoll: Ein weiterer häufiger Fehler. Das Protokoll im Konfiguration-Tab muss mit Ihrem Empfängertyp übereinstimmen.
• Bindungsprobleme: Können Kommunikationsfehler verursachen. Ich habe gelernt, die Bindungsprozedur für jeden Empfängertyp sorgfältig zu befolgen.
• Verkabelungsprobleme: Insbesondere bei Signal- und Masseverbindungen können sie die Kommunikation verhindern. Ich überprüfe immer die Durchgängigkeit mit einem Multimeter, wenn ich Verkabelungsprobleme vermute.
Fortgeschrittene Flugcontroller-Themen
Für erfahrene Piloten, die ihre Setups optimieren möchten, bieten diese fortgeschrittenen Konzepte tiefere Einblicke. Ich habe Jahre damit verbracht, diese Bereiche zu erforschen, um das Beste aus meinen Builds herauszuholen.
PID-Tuning und Filterung
Das Herzstück der Flugcontroller-Performance liegt im PID-Tuning und in der Filterung. Hier trifft Kunst auf Wissenschaft in der FPV-Welt.
PID-Grundlagen
Das Verständnis des PID-Reglers ist grundlegend für ein gutes Tuning:
P (Proportional) sorgt für eine sofortige Korrektur des Fehlers. Ich betrachte dies als die "Stärke" der Korrektur. Zu hoch und man bekommt Oszillationen; zu niedrig und der Quad fühlt sich träge an.
I (Integral) akkumuliert den Fehler über die Zeit. Dies hilft, anhaltende Kräfte wie Wind oder einen unausgewogenen Aufbau zu überwinden. Ich habe festgestellt, dass der I-Term von Anfängern oft überbewertet wird - ein wenig geht einen langen Weg.
D (Derivative) reagiert auf die Änderungsrate des Fehlers. Dies dämpft die Korrekturen des P-Terms und verhindert ein Überschwingen. Den D-Term richtig hinzubekommen ist entscheidend für einen sanften Flug - zu niedrig und man bekommt hüpfende Ecken, zu hoch und man bekommt heiße Motoren.
Fortgeschrittene Filterung
Eine ordnungsgemäße Filterung macht einen enormen Unterschied in der Flugleistung:
Die Gyro-Filterung entfernt Rauschen, bevor es den PID-Regler erreicht. Ich habe gelernt, dass sauberere Gyro-Daten zu einer besseren Flugleistung und kühleren Motoren führen.
Die D-Term-Filterung ist spezifisch für den Differenzialterm, der besonders empfindlich auf Rauschen reagiert. Ich achte besonders darauf, da übermäßiges D-Term-Rauschen schnell zu heißen Motoren führt.
Die dynamische Notch-Filterung zielt automatisch auf Motorrauschfrequenzen ab. Das war für mich ein Wendepunkt - sie passt sich an verschiedene Drosselklappenpegel an und reduziert das Rauschen drastisch, ohne Latenz hinzuzufügen.
Die RPM-Filterung verwendet die ESC-Telemetrie für eine präzise Rauschbekämpfung. Als ich dies zum ersten Mal bei einem problematischen Build aktivierte, war der Unterschied wie Tag und Nacht - plötzlich war der Quad butterweich ohne heiße Motoren.
Statische Filter zielen auf bekannte Rauschquellen bei festen Frequenzen ab. Ich setze sie sparsam ein, da sie Latenz hinzufügen, aber sie sind wertvoll, um spezifische Rauschprobleme anzugehen.
Ansatz für das Filter-Tuning
Mein Ansatz für das Filter-Tuning hat sich im Laufe der Zeit weiterentwickelt:
Ich beginne mit Standardeinstellungen oder Voreinstellungen, die in den neueren Betaflight-Versionen viel besser geworden sind. Oft reichen diese für das Freizeitfliegen aus.
Für ernsthafte Leistung analysiere ich Blackbox-Logs, um Rauschcharakteristiken zu identifizieren. Dies zeigt spezifische Frequenzen auf, die eine Ausrichtung erfordern.
Ich passe die Filter an, um gezielt Rauschen zu bekämpfen und gleichzeitig die Reaktionsfähigkeit zu erhalten. Das ist ein Balanceakt - zu viel Filterung fügt Latenz hinzu, zu wenig lässt Rauschen zurück.
Inkrementelles Testen mit kleinen Änderungen ist entscheidend. Ich nehme eine Änderung nach der anderen vor und teste gründlich, bevor ich weitermache.
Der Schlüssel ist die Balance zwischen Filterung und Latenz sowie Reaktionsfähigkeit. Perfekte Filterung mit zu viel Latenz fühlt sich schlechter an als ein bisschen Rauschen mit knackiger Reaktion.
Blackbox-Logging und -Analyse
Die Aufzeichnung von Flugdaten hat die Art und Weise, wie ich an Tuning und Fehlerbehebung herangehe, verändert:
Einrichten der Blackbox
Zu den Speicheroptionen gehören interner Flash-Speicher und SD-Karte. Für ernsthafte Tuning-Arbeiten bevorzuge ich SD-Karten, da sie viel mehr Kapazität bieten.
Die Protokollierungsraten balancieren Details gegen Dauer aus. Für das anfängliche Tuning verwende ich hohe Raten, um subtile Probleme zu erfassen; für längere Flüge reduziere ich die Rate.
Die Auswahl der relevanten zu protokollierenden Parameter hilft, die Dateigröße zu verwalten. Für die meisten Tuning-Arbeiten konzentriere ich mich auf Gyro-Daten, PID-Werte und Motorausgänge.
Analysieren von Logs
INAV und Betaflight haben ihre eigenen Tools zur Erforschung von Blackbox-Logs. Ich habe unzählige Stunden damit verbracht, diese Diagramme anzustarren und gelernt, die Muster zu interpretieren.

PIDtoolbox ist ein weiteres leistungsstarkes Tool für die tiefgreifende Analyse Ihrer Flugcontroller-Logs.
Zu den wichtigsten Metriken, nach denen ich suche, gehören die Gyro-Spur (für Rauschen), die PID-Reaktion (für Tuning) und die Motorausgänge (für Spielraum). Die Beziehungen zwischen diesen erzählen die wahre Geschichte darüber, wie Ihr Quad performt.
Das Erkennen von Problemen wird mit der Erfahrung einfacher. Ich habe gelernt, die Signaturen verschiedener Probleme zu erkennen - Rauschen sieht anders aus als PID-Probleme, die wiederum anders aussehen als mechanische Probleme.
Verwendung von Logs für das Tuning
Die Rauschanalyse hilft bei der Identifizierung von Frequenzen, die eine Filterung erfordern. Ich suche nach Spitzen im FFT-Plot, die den Motorfrequenzen oder ihren Oberwellen entsprechen.
Die Sprungantwort zeigt, wie schnell das Fluggerät auf Eingaben reagiert. Ich möchte eine schnelle Reaktion ohne übermäßiges Überschwingen sehen.
Die Auswertung des P-Terms zeigt Schwingungen oder Trägheit. Eine gute P-Term-Reaktion zeigt eine schnelle Korrektur ohne weiteres Hin- und Herspringen.
D-Term-Rauschen ist eine häufige Ursache für heiße Motoren. Ich achte auf verstärktes Rauschen im D-Term, das Spitzen in der Motorausgabe entspricht.
Der Motor-Headroom stellt sicher, dass die Motoren nicht an ihre Grenzen stoßen. Ich möchte bei aggressiven Manövern mindestens 20% Headroom bei den Motorausgängen sehen.
Betaflight CLI und erweiterte Konfiguration
Die Befehlszeilenschnittstelle bietet leistungsstarke Konfigurationsoptionen, die in der GUI nicht verfügbar sind:
Wichtige CLI-Befehle
diff all zeigt alle Einstellungen, die von den Standardwerten abweichen. Dies ist mein Lieblingsbefehl zum Überprüfen meiner Konfiguration und zum Teilen von Einstellungen mit anderen.
dump zeigt alle aktuellen Einstellungen einschließlich der Standardwerte an. Dies ist nützlich, um die vollständige Konfiguration zu verstehen.
get [parameter] zeigt bestimmte Parameterwerte an. Ich verwende dies, um einzelne Einstellungen zu überprüfen, ohne die gesamte Konfiguration durchgehen zu müssen.
set [parameter]=[value] ändert Parameterwerte. Dies ermöglicht eine präzise Kontrolle über jeden Aspekt des Flugcontrollers.
save speichert die aktuelle Konfiguration im Speicher. Ich habe auf die harte Tour gelernt, dies nach Änderungen zu verwenden - Vergessen bedeutet, die ganze Arbeit zu verlieren.
resource zeigt die Ressourcenzuweisung für Pins und Peripheriegeräte an. Dies ist für die erweiterte Konfiguration und Fehlerbehebung unerlässlich.
resource [resource_type] [index] [pin] weist Ressourcen verschiedenen Pins neu zu. Ich habe dies verwendet, um Pins für bestimmte Funktionen freizugeben oder Hardware-Probleme zu umgehen.
status zeigt Informationen zum Systemstatus an. Dies ist nützlich, um zu überprüfen, welche Funktionen aktiv sind und wie das System konfiguriert ist.
Ressourcen-Remapping
Die Neuzuweisung von Pins für verschiedene Funktionen ist eine leistungsstarke Fähigkeit:
Motorausgänge können auf verschiedene Pins verschoben werden. Ich habe dies verwendet, um beschädigte Pads auf Flugcontrollern zu umgehen.
Die UART-Neuzuweisung ermöglicht das Verschieben von seriellen Ports auf verschiedene Pins. Dies hat mich gerettet, wenn die Standard-UART-Pins beschädigt waren oder für eine andere Funktion benötigt wurden.
Die LED-Steuerung kann für verschiedene Pins konfiguriert werden. Ich habe dies verwendet, um LED-Streifen zu Builds hinzuzufügen, bei denen der Standard-LED-Pin nicht verfügbar war.
Spezielle Funktionen wie Kamerasteuerung und Summer-Ausgänge können neu zugewiesen werden. Diese Flexibilität hat es mir ermöglicht, Funktionen zu Builds hinzuzufügen, die sie sonst nicht unterstützen würden.
Benutzerdefinierte Mixer-Konfigurationen
Für nicht-standardmäßige Motoranordnungen sind benutzerdefinierte Mixer unerlässlich:
Benutzerdefinierte Motormischungen passen den Motoreinfluss auf jede Achse an. Ich habe dies für ungewöhnliche Builds wie asymmetrische Rahmen oder schwere Kamerahalterungen verwendet.
Spezielle Konfigurationen wie Trikopter und V-Leitwerke erfordern eine benutzerdefinierte Mischung. Der Standard-Mixer funktioniert für Standard-Quads, aber alles Ungewöhnliche erfordert Anpassungen.
Die Schublinearisierung verbessert das Gasansprechverhalten durch Kompensation nichtlinearer Motoreigenschaften. Dadurch fühlt sich der Gasgriff über den gesamten Bereich konsistenter an.
Firmware-Kompilierung und Anpassung
Das Erstellen von benutzerdefinierter Firmware ermöglicht spezifische Optimierungen:
Warum benutzerdefinierte Firmware kompilieren
Das Aktivieren experimenteller Funktionen bietet Zugriff auf modernste Fähigkeiten. Ich habe benutzerdefinierte Firmware kompiliert, um neue Funktionen zu testen, bevor sie offiziell veröffentlicht wurden.
Die Optimierung für spezifische Hardware kann die Leistung verbessern. Das Entfernen unnötiger Komponenten gibt Rechenleistung für das frei, was wichtig ist.
Das Anpassen von Standardeinstellungen legt Ihren bevorzugten Ausgangspunkt fest. Ich pflege einen benutzerdefinierten Build mit meinen bevorzugten Einstellungen.
Das Beheben von Fehlern erfordert manchmal die Implementierung von Patches vor offiziellen Releases. Ich habe benutzerdefinierte Firmware kompiliert, um spezifische Probleme zu beheben, die meine Builds betrafen.
Kompilierungsprozess
Das Einrichten der Entwicklungsumgebung erfordert Git, eine Toolchain und andere Abhängigkeiten. Ich pflege eine dedizierte Entwicklungs-VM für diesen Zweck.
Das Klonen des Repositorys liefert Ihnen den Quellcode, mit dem Sie arbeiten können. Ich checke immer den spezifischen Branch oder Tag aus, von dem ich bauen möchte.
Die Konfiguration des Builds beinhaltet die Auswahl des Ziels und der Funktionen. Hier können Sie anpassen, was in Ihrer Firmware enthalten ist.
Das Kompilieren erstellt die Firmware aus dem Quellcode. Moderne Computer machen diesen Prozess recht schnell.
Das Flashen lädt die kompilierte Firmware auf Ihren Flugcontroller. Ich mache immer ein Backup der Original-Firmware, bevor ich benutzerdefinierte Builds flashe.
Häufige Anpassungen
Zielmodifikationen ermöglichen hardwarespezifische Anpassungen. Ich habe Ziele modifiziert, um sie besser an die spezifische Hardware anzupassen, die ich verwende.
Feature-Schalter aktivieren oder deaktivieren bestimmte Funktionen. Das Entfernen von Funktionen, die Sie nicht verwenden, gibt Ressourcen für das frei, was wichtig ist.
Standardänderungen ändern die Startkonfiguration. Ich lege meine bevorzugten Standardwerte für PIDs, Raten und andere Einstellungen fest.
Leistungsoptimierungen passen sich an spezifische Anwendungsfälle an. Rennbuilds profitieren von anderen Optimierungen als Langstreckenbuilds.
Fehlerbehebung bei Flugcontroller-Problemen
Selbst die besten Flugcontroller können Probleme entwickeln. So diagnostiziere und behebe ich häufige Probleme:
Hardware-Fehlerbehebung
Stromversorgungsprobleme
Wenn sich Ihr FC nicht einschalten lässt oder zufällige Neustarts auftreten, überprüfen Sie diese häufigen Ursachen:
Die Ausgangsspannung des Spannungsreglers sollte sauber und stabil sein. Ich verwende ein Multimeter, um die richtige Spannung an den Testpunkten zu überprüfen.
Batterieanschluss und -spannung müssen innerhalb des Betriebsbereichs des FC liegen. Ich habe Flugcontroller beschädigt, indem ich Batterien mit höherer Spannung angeschlossen habe, als sie ausgelegt waren.
Das Hinzufügen oder Ersetzen von Filterkondensatoren kann viele strombedingte Probleme lösen. Ich füge fast jedem Build einen Low-ESR-Kondensator als günstige Versicherung gegen Stromprobleme hinzu.
Kurzschlüsse können mysteriöse Stromprobleme verursachen. Ich verwende ein Multimeter im Durchgangsmodus, um Kurzschlüsse zwischen Strom und Masse zu überprüfen.
Eine ausreichende Stromversorgungskapazität ist unerlässlich, insbesondere für Builds mit vielen Peripheriegeräten. Ich habe Probleme gesehen, bei denen der FC für sich allein einwandfrei hochfuhr, aber versagte, wenn alle Komponenten angeschlossen waren.
Sensorprobleme
Wenn Sensoren fehlerhafte Messwerte liefern oder die Stabilisierung schlecht ist:
Das Neukalibrieren von Sensoren behebt oft kleinere Probleme. Ich stelle sicher, dass der Quad bei der Beschleunigungsmesserkalibrierung perfekt waagerecht ist.
Physische Schäden können die Sensorleistung beeinträchtigen. Ich musste Flugcontroller ersetzen, nachdem harte Stürze den Kreisel beschädigt hatten.
Die Verbesserung der Vibrationsisolierung macht einen signifikanten Unterschied bei der Sensorleistung. Ich verwende jetzt bei all meinen Builds eine weiche Montage.
Firmware-Updates beheben manchmal Sensorprobleme. Ich habe Bugs in bestimmten Firmware-Versionen gesehen, die die Sensormesswerte beeinflussten.
Wenn Sensoren irreparabel beschädigt sind, ist der Austausch des Flugcontrollers die einzige Option. Ich halte für meine Hauptbuilds Ersatz-Flugcontroller bereit.
Verbindungsfehler
Wenn Peripheriegeräte nicht erkannt werden oder die Kommunikation unregelmäßig ist:
Die Überprüfung der Verkabelung und der Anschlüsse ist der erste Schritt. Ich verwende eine Lupe, um kleine Lötstellen und Verbindungen zu inspizieren.
Die Überprüfung der UART-Konfigurationen stellt sicher, dass die richtigen Protokolle auf den richtigen Ports aktiviert sind. Ich habe stundenlang Fehler gesucht, nur um festzustellen, dass ich die falsche Funktion auf einem UART aktiviert hatte.
Das Testen mit verschiedenen Kabeln kann Verbindungsprobleme identifizieren. Ich bewahre bekannte, funktionierende USB-Kabel speziell für die Fehlerbehebung auf.
Beschädigte Stifte oder Lötverbindungen verursachen oft intermittierende Probleme. Ich habe viele Probleme behoben, indem ich Lötverbindungen neu gelötet habe, die für das bloße Auge in Ordnung aussahen.
Signalpegel und Protokolle müssen zwischen den Geräten übereinstimmen. Ich hatte Probleme, bei denen 3,3V- und 5V-Geräte aufgrund von Spannungsunterschieden nicht richtig kommunizierten.
Fehlerbehebung bei der Software
Firmware-Probleme
Wenn die Firmware abstürzt, einfriert oder sich unerwartet verhält:
Die Aktualisierung auf die neueste stabile Firmware behebt oft bekannte Probleme. Ich vermeide im Allgemeinen brandneue Versionen für Builds, auf die ich angewiesen bin.
Das Ausprobieren verschiedener Firmware-Versionen kann spezifische Fehler umgehen. Ich musste die Firmware downgraden, um Probleme zu vermeiden, die mein spezielles Setup betrafen.
Das Zurücksetzen auf die Standardeinstellungen und die Neukonfiguration von Grund auf löst manchmal mysteriöse Probleme. Dies ist oft schneller, als zu versuchen, eine bestimmte problematische Einstellung zu finden.
Das Neuflashen mit vollständigem Chip-Löschen bereinigt alle beschädigten Einstellungen oder Speicher. Ich verwende dies als letzten Ausweg, wenn andere Fehlerbehebungen fehlschlagen.
Kompatibilitätsprobleme mit der Hardware können zu unerwartetem Verhalten führen. Ich überprüfe die Liste der unterstützten Ziele, bevor ich die Firmware aktualisiere.
Konfigurationsprobleme
Wenn Ihr Quad nicht korrekt auf Eingaben reagiert oder Funktionen nicht aktiviert werden:
Das Überprüfen aller Konfigurationseinstellungen ist mühsam, aber effektiv. Ich gehe methodisch durch jeden Reiter im Konfigurator.
Das Zurücksetzen auf die Standardeinstellungen und die Neukonfiguration behebt oft Probleme mit widersprüchlichen Einstellungen. Manchmal ist es schneller, als nach dem spezifischen Problem zu suchen.
Das Überprüfen der Modusschalter-Zuweisungen stellt sicher, dass sie wie erwartet aktiviert werden. Ich verwende den Empfänger-Reiter, um zu überprüfen, ob die Schalterpositionen korrekt erkannt werden.
Die Überprüfung der Empfängerkanal-Zuordnung ist entscheidend für die richtige Steuerung. Ich hatte Probleme, bei denen Kanäle falsch zugeordnet waren, was zu seltsamen Verhalten führte.
Das Exportieren und Überprüfen der Konfiguration kann helfen, Probleme zu identifizieren. Ich vergleiche Konfigurationen zwischen funktionierenden und nicht funktionierenden Builds, um Unterschiede zu erkennen.
Probleme bei der Leistungsabstimmung
Wenn Ihr Quad oszilliert, träge reagiert oder die Motoren heiß laufen:
Das Zurücksetzen der PIDs auf die Standardwerte bietet einen bekannten Ausgangspunkt. Ich mache dies immer, wenn ich signifikante Änderungen an einem Build vornehme.
Die Überprüfung der Filtereinstellungen stellt sicher, dass sie für Ihren Build geeignet sind. Zu viel Filterung verursacht Latenz; zu wenig lässt Rauschen zurück.
Die Überprüfung auf mechanische Probleme wie lose Komponenten oder beschädigte Propeller ist unerlässlich. Ich habe Abstimmungsprobleme verfolgt, die tatsächlich durch einen gebrochenen Rahmen verursacht wurden.
Die Analyse von Blackbox-Protokollen liefert Einblicke in spezifische Probleme. Dies ist das leistungsstärkste Werkzeug zur Fehlerbehebung bei Leistungsproblemen.
Die Anwendung geeigneter Voreinstellungen für Ihren Build-Typ behebt oft gängige Probleme. Die Voreinstellungen in den neuesten Betaflight-Versionen sind ziemlich gut.
Wann sollte man einen Flugcontroller ersetzen?
Manchmal ist der Austausch die einzige Option. Ich ersetze Flugcontroller, wenn:
Physische Schäden die Leistung beeinträchtigen, insbesondere bei kritischen Komponenten wie dem Gyroskop oder dem Prozessor. Ich habe versucht, beschädigte Boards zu retten, aber es lohnt sich selten.
Sensoren ausgefallen sind oder unzuverlässig geworden sind. Ein Flugcontroller mit einem unzuverlässigen Gyroskop ist gefährlich zu fliegen.
Prozessor- oder Speicherprobleme Instabilität verursachen. Wenn Ihr Flugcontroller zufällig neu startet oder einfriert, ist es Zeit für einen Ersatz.
Ein Upgrade für den Zugriff auf neue Funktionen manchmal neue Hardware erfordert. Ich habe perfekt funktionierende Flugcontroller ersetzt, um Zugriff auf Funktionen zu erhalten, die neuere Hardware erforderten.
Nach erheblichen Wasser- oder Elektroschäden ist ein Austausch oft sicherer als eine Reparatur. Diese Lektion habe ich gelernt, nachdem ich versucht hatte, einen Flugcontroller zu retten, der nass geworden war - er funktionierte eine Weile, dann versagte er mitten im Flug katastrophal.
Zukünftige Trends bei Flugcontrollern
Die Landschaft der Flugcontroller entwickelt sich weiterhin rasant. Hier sehe ich die Dinge hingehen:
Hardware-Fortschritte
H7 und leistungsstärkere Prozessoren werden zum neuen Standard. Ich habe H7-Flugcontroller getestet, und während die Unterschiede jetzt noch subtil sind, bieten sie Spielraum für zukünftige Funktionen.
Verbesserte Sensoren mit niedrigeren Rauschpegeln verbessern die Flugleistung. Jede Generation von Gyroskopen wird besser darin, Rauschen zu unterdrücken und gleichzeitig die Empfindlichkeit beizubehalten.
Die Integration nimmt zu, mit mehr All-in-One-Lösungen. Der Trend zu hochintegrierten Flugstacks wird sich fortsetzen und Builds sauberer und einfacher machen.
Die Größenreduzierung setzt sich fort, wobei die Komponenten immer kleiner und leichter werden. Ich bin erstaunt, wie viel Funktionalität in moderne 16×16mm Flugcontroller passt.
Verbesserungen der Energieeffizienz bieten eine bessere Leistung pro Watt. Dies ist besonders wichtig für Langstrecken- und Ausdauer-Builds.
Software-Innovationen
Maschinelles Lernen für adaptive Abstimmung und Filterung steht am Horizont. Ich habe frühe Experimente mit ML-basierter Abstimmung gesehen, die vielversprechend für die automatische Optimierung der Leistung sind.
Fortschrittliche Autonomiefunktionen verbessern sich mit besseren GPS- und Navigationsfähigkeiten. Die Lücke zwischen Hobby- und professionellen Drohnenfähigkeiten wird kleiner.
Vereinfachtes Setup mit intuitiverer Konfiguration macht das Hobby zugänglicher. Die Lernkurve wird mit jeder Firmware-Generation flacher.
Spezialisierte Firmware-Optionen, die auf bestimmte Flugstile zugeschnitten sind, entstehen. Wir sehen mehr Divergenz zwischen Renn-, Freestyle- und Langstrecken-Firmware.
Verbesserte Standardeinstellungen bedeuten eine bessere Out-of-the-Box-Erfahrung. Moderne Flugcontroller fliegen mit Standardeinstellungen bemerkenswert gut.
Aufkommende Technologien
Computer Vision für kamerabasierte Navigation und Hindernisvermeidung wird zugänglicher. Ich habe mit grundlegenden Sichtsystemen experimentiert, und sie werden für den Hobbygebrauch immer praktischer.
Mesh-Netzwerke ermöglichen die Kommunikation von Drohne zu Drohne. Dies eröffnet Möglichkeiten für koordinierten Flug und verbesserte Sicherheit.
Fortschrittliche Telemetrie liefert umfassendere Flugdaten. Die Menge an Informationen, die Piloten zur Verfügung stehen, nimmt weiter zu.
Cloud-Integration für Konfiguration und Datenanalyse wird immer häufiger. Online-Plattformen zum Teilen und Analysieren von Flugdaten entstehen.
Simulationsintegration mit digitalen Zwillingen ermöglicht Tests in virtuellen Umgebungen. Ich habe Simulationen verwendet, um Konfigurationen zu testen, bevor ich sie auf echter Hardware anwende.
FAQ: Häufige Fragen zu Flugcontrollern
Im Laufe der Jahre wurde ich unzählige Male zu Flugcontrollern befragt. Hier sind die häufigsten Fragen:
Was ist der Unterschied zwischen F4- und F7-Flugcontrollern?
F4 und F7 beziehen sich auf die STM32-Prozessorserie, die im Flugcontroller verwendet wird. Meiner Erfahrung nach sind die Hauptunterschiede:
F7-Prozessoren sind leistungsfähiger (typischerweise 216-400MHz gegenüber 168-216MHz für F4), was höhere Loop-Raten, komplexere Filterung und zusätzliche Funktionen ermöglicht. Ich bemerke den Unterschied am meisten in anspruchsvollen Situationen mit viel Filterung.
F7-Controller haben normalerweise mehr UARTs und eine bessere Gesamtleistung. Dies ist wichtig, wenn Sie mehrere Peripheriegeräte wie GPS, Telemetrie und Kamerasteuerung anschließen.
F4-Controller sind erschwinglicher und für die meisten Flugstile immer noch ausreichend. Viele meiner Builds verwenden immer noch F4-Boards, da sie eine gute Balance zwischen Leistung und Kosten bieten.
Für die meisten Piloten ist ein F4 völlig ausreichend, aber wenn Sie die Grenzen der Leistung ausreizen oder viele Peripheriegeräte anschließen müssen, lohnt sich ein Upgrade auf einen F7.
Woran erkenne ich, ob mein Flugcontroller beschädigt ist?
Anzeichen für einen beschädigten Flugcontroller sind:
Das Versagen beim Einschalten oder Verbinden über USB ist das offensichtlichste Zeichen. Wenn sich Ihr FC nicht einschalten lässt oder von Ihrem Computer nicht erkannt wird, stimmt etwas nicht.
Unregelmäßige Sensorwerte oder Drift können auf einen Gyroskopschaden hindeuten. Ich habe dies nach harten Abstürzen gesehen – der Quad wird aufgrund zufälliger Bewegungen unfliegbar.
Unerwartete Neustarts oder Einfrieren deuten auf Prozessor- oder Speicherprobleme hin. Wenn sich Ihr Quad mitten im Flug zufällig entwaffnet, versagt möglicherweise der Flugcontroller.
Rauch oder sichtbare Schäden an Komponenten sind ein eindeutiger Indikator. Ich habe schon mehr als einen Flugcontroller in Rauch aufgehen lassen.
Überhitzung während des Betriebs kann auf interne Schäden oder Kurzschlüsse hinweisen. Wenn Ihr FC ungewöhnlich heiß wird, stimmt etwas nicht.
Anhaltende Fehler im Konfigurator deuten oft auf Hardwareprobleme hin. Wenn Sie trotz erneuter Firmware-Aktualisierung wiederholt denselben Fehler sehen, liegt möglicherweise ein Hardwareproblem vor.
Das Versagen beim Armen oder Aufrechterhalten eines stabilen Fluges trotz ordnungsgemäßer Konfiguration deutet auf Sensorprobleme hin. Ich hatte Flugcontroller, die alle Tests auf der Werkbank bestanden haben, aber in der Luft versagten.
Welcher Flugcontroller ist am besten für Anfänger geeignet?
Für Anfänger empfehle ich Flugcontroller, die:
Zuverlässig und gut unterstützt sind, wie der iFlight SucceX-E F4 oder Matek F405-STD. Diese haben sich bewährt und verfügen über große Benutzergemeinschaften.
Preislich vernünftig (ca. 30-40 $), um Qualität und Budgetbeschränkungen in Einklang zu bringen. Es ist nicht nötig, während des Lernens für High-End-Funktionen zu bezahlen.
Kompatibel mit Betaflight für einfaches Setup und umfangreiche Dokumentation. Das Betaflight-Ökosystem verfügt über die meisten Ressourcen für Anfänger.
Gut dokumentiert mit guter Community-Unterstützung für Fehlerbehebung. Wenn Sie unweigerlich auf Probleme stoßen, sind Ressourcen zur Unterstützung von unschätzbarem Wert.
Langlebig genug, um Lernabstürze zu überstehen. Ich suche nach Boards mit Schutzlackierung und robustem Design.
Inklusive wesentlicher Funktionen ohne überwältigende Komplexität. Funktionen wie OSD und Stromüberwachung sind nützlich, aber fortgeschrittene Funktionen können warten.
F4-Prozessoren sind für Anfänger in der Regel ausreichend, wobei F7 eine Option für diejenigen ist, die mehr Spielraum zum Wachsen wünschen. Ich habe mit F1-Prozessoren angefangen und war vollkommen zufrieden, bis ich genug wusste, um die Vorteile fortschrittlicherer Hardware zu schätzen.
Kann ich jeden Flugcontroller mit jedem ESC verwenden?
Die meisten modernen Flugcontroller können mit den meisten ESCs zusammenarbeiten, aber es gibt Kompatibilitätsüberlegungen:
Protokollunterstützung ist entscheidend – stellen Sie sicher, dass der FC und die ESCs die gleichen Protokolle unterstützen (DShot, Multishot usw.). Ich bevorzuge DShot600 für die meisten Builds, da es eine gute Balance zwischen Leistung und Zuverlässigkeit bietet.
Spannungskompatibilität ist wichtig – überprüfen Sie, ob der FC die von den ESCs/PDB gelieferte Spannung verarbeiten kann. Ich habe Flugcontroller beschädigt, indem ich sie an höhere Spannungen angeschlossen habe, als für die sie ausgelegt waren.
Physische Verbindungen variieren zwischen einzelnen Drähten und Flachbandkabeln. Stellen Sie sicher, dass Ihr FC und die ESCs über kompatible Verbindungsmethoden verfügen.
Stellen Sie bei FC/ESC-Stacks sicher, dass sie für die Zusammenarbeit konzipiert sind. Während das Mischen und Anpassen möglich ist, bieten Stacks, die als Einheit konzipiert sind, in der Regel eine bessere Integration.
Im Allgemeinen kann jeder hochwertige FC mit jedem hochwertigen ESC zusammenarbeiten, wenn er richtig konfiguriert ist, aber aufeinander abgestimmte Komponenten bieten oft die beste Erfahrung. Ich ziehe es vor, wenn möglich Komponenten desselben Herstellers zu verwenden, da sie für die Zusammenarbeit konzipiert sind.
Wie oft sollte ich meine Flugcontroller-Firmware aktualisieren?
Es gibt keinen festen Zeitplan für Firmware-Updates, aber ich halte mich an folgende Richtlinien:
Wenn alles gut funktioniert, fühlen Sie sich nicht verpflichtet, sofort zu aktualisieren. Das alte Sprichwort "Wenn es nicht kaputt ist, repariere es nicht" gilt auch hier.
Aktualisieren Sie für neue Funktionen, wenn eine Version Fähigkeiten enthält, die Sie wünschen. Ich habe speziell auf Betaflight 4.3 aktualisiert, um die verbesserte RPM-Filterung zu nutzen.
Aktualisieren Sie für Fehlerbehebungen, wenn Sie Probleme haben, die in einer neuen Version behoben werden. Ich überprüfe die Versionshinweise, um zu sehen, ob sie Probleme beheben, die ich habe.
Bei größeren Versionen warte ich nach der Veröffentlichung ein paar Wochen auf Feedback aus der Community. Lassen Sie andere zuerst die Fehler finden.
Vermeiden Sie Aktualisierungen unmittelbar vor wichtigen Rennen oder Reisen. Ich habe diese Lektion auf die harte Tour gelernt – ein Update in letzter Minute kann unerwartete Probleme verursachen.
Sichern Sie immer Ihre Konfiguration, bevor Sie aktualisieren, und seien Sie bereit, nach bedeutenden Updates Zeit für die Neukonfiguration aufzuwenden. Ich mache mir Notizen zu meinen spezifischen Einstellungen für jeden Quad, um diesen Prozess zu erleichtern.
Was verursacht Flugcontroller-Gyro-Rauschen?
Gyro-Rauschen kann mehrere Ursachen haben:
Mechanische Vibrationen von Motoren, Propellern oder Rahmenresonanz sind die häufigste Ursache. Ich habe festgestellt, dass eine ordnungsgemäße Auswuchtung von Propellern und Motoren einen erheblichen Unterschied macht.
Elektrisches Rauschen von ESCs, Stromversorgungssystemen oder Verkabelung kann die Gyro-Messwerte beeinflussen. Das Fernhalten von Signalleitungen von Stromleitungen trägt dazu bei, dies zu reduzieren.
Sensorbeschränkungen erzeugen einen inhärenten Rauschpegel. Verschiedene Gyro-Modelle haben unterschiedliche Rauscheigenschaften.
Montagefehler wie schlechte Isolierung oder starre Montage übertragen Vibrationen direkt auf das Gyroskop. Ich verwende jetzt bei allen meinen Builds eine weiche Montage.
Beschädigte Komponenten können zu erhöhtem Rauschen führen. Ein Gyroskop, das harten Abstürzen ausgesetzt war, kann höhere Rauschpegel entwickeln.
Die Reduzierung des Rauschens beinhaltet in der Regel eine bessere Vibrationsisolierung, verbesserte Verkabelung, hochwertige Komponenten und geeignete Filtereinstellungen. Ich gehe zuerst mechanische Probleme an und verwende dann Software-Filterung, um das verbleibende Rauschen zu behandeln.
Kann ich Einstellungen zwischen Flugcontrollern übertragen?
Ja, aber mit Einschränkungen:
Die Übertragung von Einstellungen funktioniert am besten zwischen dem gleichen Firmware-Typ (z. B. Betaflight zu Betaflight). Ich hatte gemischte Ergebnisse beim Versuch, Einstellungen zwischen verschiedenen Firmware-Typen zu übertragen.
Ähnliche Hardware liefert bessere Ergebnisse bei der Übertragung von Einstellungen. Der Wechsel von einem F4-Board zu einem anderen ähnlichen F4-Board funktioniert in der Regel gut.
Die Verwendung des Befehls diff all zum Speichern von Einstellungen ist die zuverlässigste Methode. Ich speichere diese Ausgabe für jeden meiner Builds in einer Textdatei.
Backup-Funktionen des Konfigurators funktionieren gut für identische Hardware. Dies ist bequem, aber weniger flexibel als CLI-Befehle.
Einige Einstellungen müssen für neue Hardware immer manuell angepasst werden. Insbesondere Ressourcenzuordnungen sind hardwarespezifisch und lassen sich nicht gut übertragen.
Überprüfen Sie übertragene Einstellungen immer sorgfältig, da falsche Konfigurationen zu unerwartetem Verhalten oder Abstürzen führen können. Ich gehe nach der Übertragung von Einstellungen jeden Tab im Konfigurator durch, um zu überprüfen, ob alles korrekt aussieht.
Was ist der Unterschied zwischen Hardware- und Software-Gyro-Filterung?
Die Unterscheidung ist wichtig, um zu verstehen, wie man die Leistung optimieren kann:
Die Hardware-Filterung wird im Gyro-Sensor selbst implementiert und bietet eine anfängliche Rauschunterdrückung, bevor das Signal den Prozessor erreicht. Dies variiert zwischen Gyro-Modellen und kann in der Firmware nicht angepasst werden.
Die Software-Filterung wird in der Flugcontroller-Firmware implementiert und ist durch Konfiguration anpassbar. Dazu gehören dynamische Kerbfilter, Tiefpassfilter und RPM-basierte Filterung.
Moderne Flugsteuerungen verwenden eine Kombination aus beiden Ansätzen. Ich verlasse mich auf die Hardware-Filterung als erste Verteidigungslinie und verwende dann Software-Filterung, um die spezifischen Rauschcharakteristiken meines Aufbaus zu adressieren.
Der Vorteil der Software-Filterung ist die Flexibilität – sie kann für spezifische Aufbauten und Flugstile abgestimmt werden. Der Nachteil ist, dass sie Rechenleistung benötigt und Latenz einführen kann.
Fazit
Die Flugsteuerung ist wirklich das Gehirn Ihrer FPV-Drohne und setzt Ihre Absichten in präzise Flugmanöver um. Nach Jahren des Bauens und Fliegens habe ich zu schätzen gelernt, wie entscheidend diese Komponente für das Gesamterlebnis ist.
Das Verständnis der Flugsteuerungstechnologie, der Auswahlkriterien und der Konfigurationsoptionen ermöglicht es Ihnen, die Leistung für Ihre spezifischen Bedürfnisse und Ihren Flugstil zu optimieren. Egal, ob Sie Ihre erste Drohne oder Ihre fünfzigste bauen, die Wahl der richtigen Flugsteuerung und deren korrekte Konfiguration haben einen tiefgreifenden Einfluss auf Ihr Flugerlebnis.
Die Technologie entwickelt sich rasant weiter, mit leistungsfähigeren Prozessoren, besseren Sensoren und ausgefeilteren Firmware-Plattformen, die immer leistungsfähigere Plattformen bieten. Durch die Beherrschung der Einrichtung und Abstimmung der Flugsteuerung werden Sie das volle Potenzial Ihrer Drohne ausschöpfen und die perfekte Balance zwischen Stabilität, Reaktionsfähigkeit und Funktionen für Ihren einzigartigen Flugstil erreichen.
Ich habe auf meinem Weg zum Verständnis dieser komplexen Geräte mehr Drohnen abgestürzt, als ich zugeben möchte, aber jeder Fehler hat mich etwas Wertvolles gelehrt. Die Zufriedenheit einer perfekt abgestimmten Drohne, die genau wie beabsichtigt reagiert, macht die ganze Fehlersuche lohnenswert. Es gibt nichts Vergleichbares wie das Gefühl einer Drohne, die sich wie eine Erweiterung Ihrer Gedanken anfühlt, und die Flugsteuerung macht das möglich.


