وحدات التحكم في الطائرات بدون طيار: المبادئ والتشغيل
وحدة التحكم في الطيران (FC) هي دماغ طائرة FPV الخاصة بك، حيث تترجم مدخلات التحكم إلى أوامر المحرك الدقيقة اللازمة للطيران. تعالج البيانات من مختلف الحساسات، وتشغل خوارزميات معقدة، وتقوم بمئات التعديلات في الثانية للحفاظ على استقرار طائرتك واستجابتها. يستكشف هذا الدليل الشامل تقنية وحدات التحكم في الطيران، وخيارات البرامج الثابتة، ومعايير الاختيار، وإجراءات الإعداد، والميزات المتقدمة لمساعدتك على فهم وتحسين هذا المكون الحيوي.
مقدمة عن وحدات التحكم في الطيران
بعد سنوات من بناء وطيران طائرات FPV، أصبحت أقدر أنه لا يوجد مكون واحد يؤثر على تجربة الطيران أكثر من وحدة التحكم في الطيران. ما زلت أتذكر أول مشروع بناء لي باستخدام لوحة KK البدائية التي بالكاد حافظت على استقرار الطائرة. والآن، تقوم معالجات H7 المتطورة في وحدات التحكم الحديثة بإجراء عمليات حسابية معقدة كانت ستبدو مثل الخيال العلمي قبل بضع سنوات فقط.

وحدة التحكم في الطيران هي لوحة دائرة متخصصة تحتوي على معالج دقيق ومختلف الحساسات ووصلات الإدخال/الإخراج. تعمل كوحدة المعالجة المركزية لطائرتك، وتقوم بعدة وظائف حاسمة:
• الاستقرار: الحفاظ على الطيران المستوي وتعويض القوى الخارجية
• معالجة مدخلات التحكم: ترجمة حركات العصا إلى أوامر المحرك
• دمج الحساسات: جمع ومعالجة البيانات من الجيروسكوبات والمقاييس التسارعية وغيرها
• إدارة الميزات: التعامل مع أوضاع مثل acro وangle وGPS hold وغيرها
• التواصل الطرفي: التفاعل مع أجهزة الاستقبال ومتحكمات السرعة الإلكترونية والكاميرات والمكونات الأخرى
تطور وحدات التحكم في الطيران
لقد شهدت التطور الهائل لوحدات التحكم في الطيران حتى منذ عام 2019 عندما بدأت هوايتي.
بدأ كل شيء بمعالجات 8-بت أساسية التي بالكاد استطاعت التعامل مع الاستقرار البسيط. كان الانتقال إلى وحدات تحكم 32-بت حوالي عام 2014 ثورياً - فجأة أصبحت الطائرات الرباعية قادرة على تحكم أكثر دقة وميزات متقدمة. كان التقدم مذهلاً:
• وحدات التحكم المبكرة (2010-2013): استقرار أساسي مع ميزات محدودة. المشاريع المبنية بلوحة MultiWii كانت تتطلب انتباهاً مستمراً للحفاظ على الطيران المستوي.
• ثورة 32-بت (2014-2016): معالجة أسرع وخوارزميات أفضل. كانت Naze32 نقطة تحول - فجأة أصبحت الطائرات الرباعية تشعر وكأنها آلات مختلفة تماماً.
• العصر الحديث (2017-الحاضر): معالجات F4/F7 قوية ومكونات متكاملة. لقد وجدت أن وحدات التحكم الحديثة يمكنها التعامل مع تصفية معقدة ومعدلات حلقة عالية تجعل حتى طيران الفريستايل العدواني يشعر بنعومة.
• الجيل القادم (2023+): معالجات H7 مع قدرات التعلم الآلي ودمج الحساسات المُحسّن. هذه هي وحدات التحكم المتطورة، والفرق في أداء الطيران دقيق ولكنه ملحوظ، خاصة في الظروف الصعبة.
أدى هذا التطور إلى وحدات تحكم في الطيران أصغر حجماً وأكثر قدرة مع ميزات وأداء متزايد التطور. حتى أنني أتذكر الأوقات عندما كانت وحدة التحكم في الطيران بحجم بطاقة الائتمان - والآن غالباً ما تكون أصغر من طابع بريدي مع أداء أكثر بكثير.
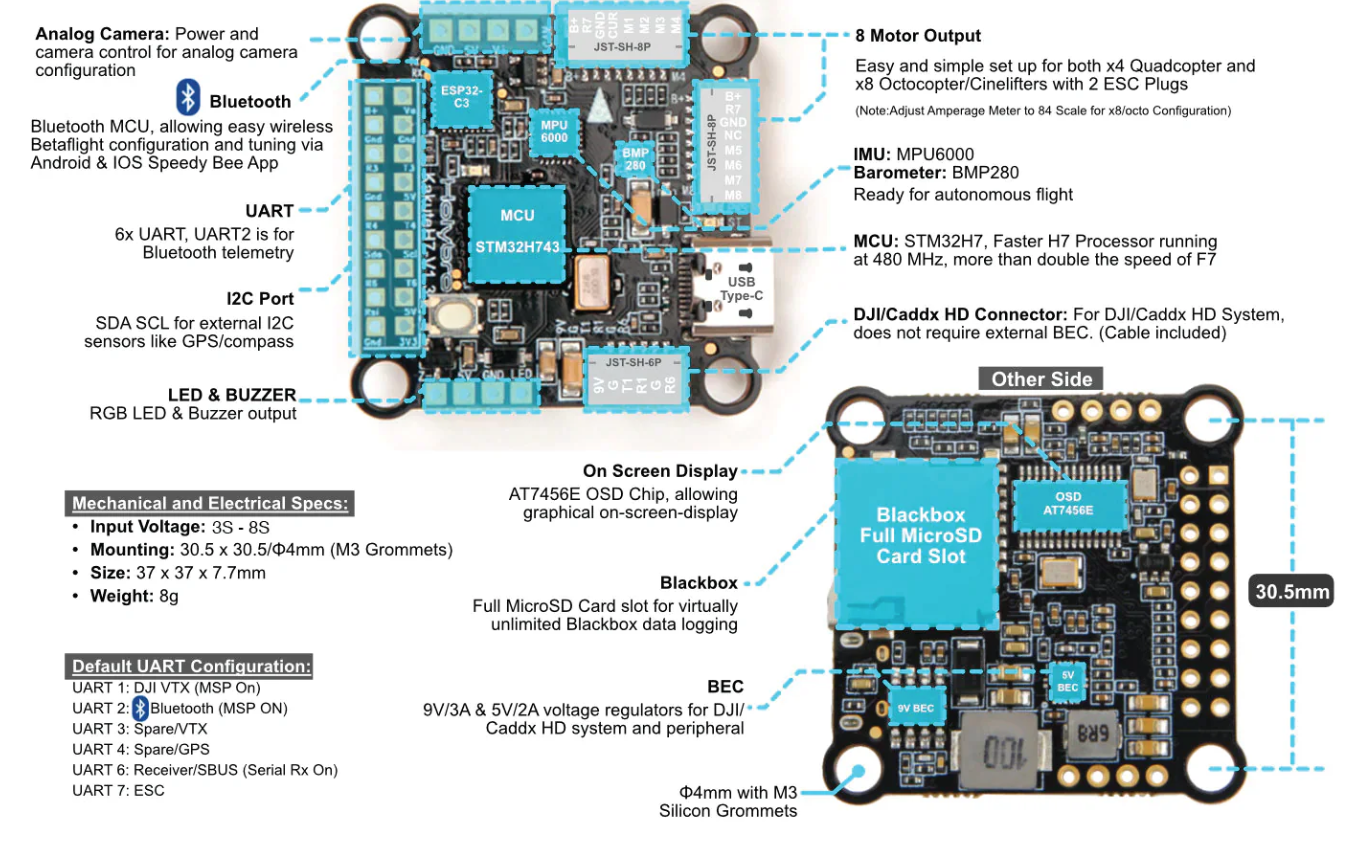
المكونات الأساسية لوحدة التحكم في الطيران
تدمج وحدات التحكم في الطيران الحديثة العديد من المكونات الرئيسية التي تعمل معاً لإنشاء تجربة الطيران. دعني أشرح ما تعلمته عن هذه المكونات على مدى سنوات من البناء واستكشاف الأخطاء وإصلاحها.
المعالج الدقيق
وحدة المعالجة المركزية هي عادة معالج STM32، ونوعه يحدث فرقاً كبيراً في الأداء. لقد طرت بكل شيء من معالجات F1 إلى H7، وإليك ما وجدته:
• معالجات F1: رقائق قديمة بسعة 32 بت وهي الآن قديمة. طرت بها بضع مرات للمتعة، وبينما أنجزت المهمة، كانت القيود محبطة.
• معالجات F3 (72 ميجاهرتز): أصبحت قديمة إلى حد كبير الآن، لكنها كانت خطوة قوية مقارنة بـ F1. لقد قمت بالطيران ببناء واحد يعتمد على F3 وكان مرضياً بالفعل.
• معالجات F4 (168-216 ميجاهرتز): لا تزال شائعة وقادرة تماماً على معظم أساليب الطيران. ما زلت أستخدم لوحة F4 في بناء تعليمي لأنها توفر توازناً رائعاً بين الأداء والتكلفة.
• معالجات F7 (216-400 ميجاهرتز): المعيار الحالي، مع قوة معالجة إضافية ملحوظة في المواقف الصعبة. عندما قمت بتبديل الطائرة الرباعية الرئيسية الخاصة بي إلى F7، لاحظت على الفور تحسناً في التعامل مع التصفية المعقدة ومعدلات الحلقة العالية.
• معالجات H7 (400-480 ميجاهرتز): تظهر كخيار عالي المستوى. لقد كنت أختبر واحدة في بناء السباق الخاص بي، وبينما الاختلافات دقيقة، فإن المساحة المتاحة للميزات المستقبلية كبيرة.
يحدد المعالج قوة حوسبة وحدة التحكم في الطيران، مما يؤثر على قدرتها على تشغيل خوارزميات معقدة والحفاظ على أوقات حلقة عالية. لقد تعلمت أنه في حين أن المعالج ليس كل شيء، إلا أنه يحدد سقف ما يمكن أن تحققه وحدة التحكم في الطيران الخاصة بك.
أجهزة الاستشعار
أجهزة الاستشعار على وحدة التحكم في الطيران ضرورية لاستقرار الطيران وتنفيذ الميزات. لقد تحطمت بعض الطائرات بدون طيار بسبب مشاكل أجهزة الاستشعار، لذلك تعلمت أن أنتبه جيداً لهذا الجانب.
• الجيروسكوب: يقيس معدلات الدوران حول المحاور الثلاثة (الميل، اللف، الانعراج). هذا هو جهاز الاستشعار الأكثر أهمية، ووجدت أن جودة الجيروسكوب تحدث فرقاً ملحوظاً في أداء الطيران. الجيروسكوب المشوش يؤدي إلى سلوك متقلب وغير متوقع لا يمكن لأي قدر من الضبط إصلاحه بالكامل.
• مقياس التسارع: يقيس التسارع الخطي وهو أمر بالغ الأهمية لوضع الزاوية. نادراً ما أستخدم وضع الزاوية هذه الأيام، ولكن عندما أسمح لصديق بتجربة إحدى طائراتي بدون طيار، أكون ممتناً لوجود مقياس تسارع معاير جيداً.
• البارومتر: يقيس الضغط الجوي لتقدير الارتفاع. وجدت أن هذه متفاوتة من حيث الموثوقية - فهي تتأثر بالهواء المتدفق من المراوح وتغير الظروف الجوية. للحفاظ على ارتفاع جاد، أفضل استخدام GPS.
• مقياس المغناطيسية (البوصلة): يحدد الاتجاه بالنسبة للشمال المغناطيسي. من تجربتي، هذه عرضة للتداخل من أنظمة الطاقة والمحركات. أقوم دائماً بتركيبها بعيداً قدر الإمكان عن أسلاك الطاقة.
• GPS: يوفر بيانات الموقع لميزات الملاحة. لقد تعلمت بالطريقة الصعبة أن ليست كل وحدات GPS متساوية - إنفاق المزيد من المال للحصول على وحدة ذات استقبال أفضل للأقمار الصناعية أنقذني من فقدان الطائرات بدون طيار أثناء الرحلات طويلة المدى. انظر أيضاً: تقنية GNSS للطائرات بدون طيار
واجهات الإدخال/الإخراج
تعتبر الاتصالات بالأجهزة الطرفية والمكونات الأخرى هي ما يجعل وحدة التحكم في الطيران متعددة الاستخدامات. لقد قمت ببناء كل شيء من طائرات سباق بسيطة إلى آلات معقدة طويلة المدى، والواجهات المتاحة تحدث كل الفرق.
• منافذ UART: توفر اتصالاً تسلسلياً مع أجهزة الاستقبال، GPS، القياس عن بعد، إلخ. وجدت أن وجود 4-5 منافذ UART على الأقل يمنحني المرونة التي أحتاجها لمعظم المباني. نفاد منافذ UART أمر محبط وغالباً ما يتطلب تنازلات.
• ناقل I2C: يمكّن الاتصال بأجهزة استشعار وملحقات معينة. كانت تجاربي مع I2C مختلطة - فهو مريح ولكن يمكن أن يكون عرضة لمشاكل الضوضاء إذا لم يتم تنفيذه بشكل صحيح.
• ناقل SPI: يوفر اتصالاً عالي السرعة مع الجيروسكوبات والأجهزة الأخرى. هذا أمر بالغ الأهمية للأداء، ولاحظت أن وحدات التحكم في الطيران ذات ناقلات SPI المنفذة جيداً تميل إلى أن يكون لديها إشارات جيروسكوب أنظف.
• مخرجات المحرك: تتصل بـ ESCs للتحكم في المحرك. كان الاتجاه نحو بروتوكولات DShot بمثابة تغيير في قواعد اللعبة من تجربتي - فالدقة الرقمية تلغي العديد من صداع الرأس في المعايرة الذي كنت أتعامل معه. انظر أيضاً: محركات طائرات FPV بدون طيار و وحدات ESC لطائرات FPV بدون طيار
• منفذ USB: يستخدم للتكوين وتحديثات البرامج الثابتة. لقد تعلمت التحقق من جودة هذا الاتصال - منفذ USB الضعيف غالباً ما يكون أول شيء ينكسر في وحدة التحكم في الطيران.
إدارة الطاقة
توفر دوائر الطاقة طاقة منظمة ونظيفة، وقد تعلمت عدم التقليل من أهميتها. في بداية رحلتي مع FPV، واجهت مشاكل طيران غامضة تبين في النهاية أنها ترجع إلى مشاكل في الطاقة.
• منظمات الجهد: تحول جهد البطارية إلى 5 فولت و 3.3 فولت للإلكترونيات. وجدت أن المنظمات عالية الجودة تحدث فرقاً كبيراً في موثوقية النظام بشكل عام، خاصة في البنايات عالية الطاقة.
• مكثفات التصفية: تنعم إمداد الطاقة وتقلل الضوضاء. أضيف دائماً مكثفات إضافية إلى بناياتي - إنها تأمين رخيص ضد الضوضاء الكهربائية التي يمكن أن تؤثر على قراءات أجهزة الاستشعار.
• دوائر الحماية: تمنع التلف من ارتفاع الجهد أو انعكاس القطبية. لقد أتلفت أكثر من وحدة تحكم في الطيران عن طريق توصيل البطارية بالعكس، لذلك أبحث الآن عن لوحات ذات حماية قوية.
لمزيد من المعلومات التفصيلية حول تشغيل طائرتك بدون طيار، انظر:
نظرة عامة على أنواع وكيمياء بطاريات الطائرات بدون طيار
أجهزة وحدة التحكم في الطيران
على مر السنين، استخدمت عشرات من وحدات التحكم في الطيران المختلفة عبر بنايات متنوعة، وطورت بعض الآراء القوية حول ما يعمل بشكل أفضل لتطبيقات مختلفة.
تصنيفات وحدة التحكم في الطيران
حسب نوع المعالج
المعالج هو الطريقة الأكثر شيوعاً لتصنيف وحدات التحكم في الطيران، ووجدت أن اختيار المعالج المناسب لاحتياجاتك أمر بالغ الأهمية.
وحدات التحكم في الطيران F4 (168-216 ميجاهرتز) توفر توازناً جيداً بين الأداء والتكلفة. أستخدم هذه في معظم بناياتي لأنها كافية لجميع التطبيقات باستثناء الأكثر تطلباً. خدمتني وحدات Betaflight F4 وMatek F405 وiFlight SucceX-E F4 جميعها بشكل جيد.
وحدات التحكم في الطيران F7 (216-400 ميجاهرتز) توفر المزيد من منافذ UART والميزات. أستخدم هذه في البنايات التي أحتاج فيها إلى توصيل أجهزة طرفية متعددة أو أريد أفضل أداء ممكن للتصفية. Matek F722 وSpeedyBee F7 وiFlight SucceX-E F7 من بين المفضلة لدي.
وحدات التحكم في الطيران H7 (400-480 ميجاهرتز) تمثل أحدث التقنيات مع أقصى قدرة معالجة. لقد كنت أختبر SpeedyBee H7 وMatek H743، وبينما تحسينات الأداء على F7 دقيقة، فهي بالتأكيد مستقبلية للميزات المتقدمة.
حسب الشكل
تأتي وحدات التحكم في الطيران بأنماط تثبيت موحدة، واختيار الحجم المناسب أمر بالغ الأهمية لبنائك.
التثبيت القياسي (30.5×30.5 مم) هو الحجم الأكثر شيوعاً للبنايات 5 بوصة وأكبر. أستخدم هذه في معظم طائراتي الحرة وطويلة المدى لأنها توفر معظم الميزات وخيارات الاتصال.
تثبيت 20×20 مم شائع في بنايات 3 بوصة وأصغر. وجدت أن هذه اللوحات الأصغر قطعت شوطاً طويلاً من حيث الميزات، على الرغم من أنه سيكون لديك عادةً منافذ UART وخيارات اتصال أقل.
تثبيت 16×16 مم يستخدم في البنايات الصغيرة وtiny whoops. هذه صغيرة للغاية، وأنا دائماً مندهش من مقدار الوظائف التي يمكن للمصنعين حزمها في مساحة صغيرة جداً.
AIO (الكل في واحد) يجمع بين وحدة التحكم في الطيران (FC) مع مكونات أخرى مثل ESCs. لقد بدأت أقدر هذه الأنظمة لبعض التجميعات - فهي تبسط الأسلاك ويمكن أن تقلل من الوزن، على الرغم من أنها تمثل نقطة فشل واحدة.
حسب تكامل الميزات
غالبًا ما تدمج وحدات التحكم في الطيران الحديثة مكونات إضافية، ووجدت أن اختيار المستوى المناسب من التكامل يمكن أن يجعل عملية البناء أسهل بكثير.
FC فقط لوحات توفر وظائف وحدة التحكم في الطيران فقط. ما زلت أستخدم هذه في معظم تجميعاتي حيث أرغب في الحصول على أقصى قدر من المرونة في اختيار المكونات.
FC+PDB مجموعات تشمل توزيع الطاقة. هذه توفر المساحة وتبسط التوصيلات السلكية.
FC+ESC (4-in-1) مجموعات تجمع بين وحدة التحكم في الطيران وأجهزة التحكم بالسرعة الإلكترونية. تقلل بشكل كبير من وقت البناء وتخلق إعدادًا أنظف وأكثر موثوقية.
FC+ESC+VTX حلول الكل في واحد تشمل جهاز إرسال الفيديو. كانت تجاربي مختلطة معها - فهي مريحة ولكن يمكن أن ترتفع حرارتها، وإذا فشل أحد المكونات، فأنت تستبدل كل شيء.
FC+ESC+VTX+RX مجموعات الطيران الكاملة تشمل جهاز الاستقبال. هذه توفر أقصى قدر من التكامل، وبينما كنت متشككًا في البداية، إلا أن بعض التنفيذات الأحدث تعمل بشكل جيد بشكل مدهش.
ميزات الأجهزة الرئيسية التي يجب مراعاتها
عند اختيار وحدة التحكم في الطيران، تعلمت الانتباه إلى العديد من ميزات الأجهزة التي يمكن أن تحسن أو تعيق تجربة الطيران.
عدد وتوفر منافذ UART
منافذ UART هي منافذ تسلسلية تستخدم لتوصيل الأجهزة الطرفية، ووجدت أن وجود عدد كافٍ منها أمر بالغ الأهمية للمرونة.
أعتبر 3 منافذ UART هي الحد الأدنى المطلق (جهاز الاستقبال، والقياس عن بعد، ومنفذ احتياطي). لقد قمت ببناء طائرات رباعية بـ 3 منافذ UART فقط، لكنها دائمًا تشعر بالتقييد.
4-5 منافذ UART توفر إعدادًا مريحًا لمعظم التجميعات. هذا يمنحني اتصالات كافية لجهاز استقبال، وقياس عن بعد، ونظام تحديد المواقع GPS، وربما التحكم في الكاميرا أو التحكم في المصابيح LED.
6+ منافذ UART توفر أقصى قدر من المرونة للإعدادات المعقدة. تستخدم تجميعاتي للمدى الطويل عادةً هذا العدد من الاتصالات للأجهزة الطرفية المختلفة وأنظمة النسخ الاحتياطي.
لقد تعلمت بالطريقة الصعبة أن ليست كل منافذ UART متساوية - فقد تكون بعضها مشتركة مع وظائف أخرى أو لديها قيود. تحقق دائمًا من الوثائق بعناية.
نوع وتنفيذ الجيروسكوب
الجيروسكوب أمر بالغ الأهمية لأداء الطيران، وقد طورت تفضيلات قوية بناءً على سنوات من الاختبار.
سلسلة MPU6000 أجهزة الجيروسكوب موثوقة مع مستوى ضوضاء أقل. أفضل هذه لتجميعات السباق حيث كل جزء من الأداء مهم. أصبح من الصعب العثور عليها في اللوحات الأحدث، لكنها لا تزال خياري الأول عندما تكون متاحة.
ICM20602/ICM20689 أجهزة الجيروسكوب تقدم أداءً جيدًا وهي شائعة في وحدات التحكم في الطيران الحديثة. وجدت أنها كافية تمامًا لمعظم أساليب الطيران، رغم أنها أكثر عرضة للضوضاء قليلاً من MPU6000.
BMI270 هو مستشعر أحدث مع أداء ممتاز. لقد أثارت إعجابي قدرته على التعامل مع الضوضاء في تجميعاتي الأخيرة، ويبدو أنه أصبح المعيار الجديد.
طريقة التثبيت مهمة أيضًا - أجهزة الجيروسكوب المثبتة بليونة مقابل المثبتة بإحكام تتعامل مع الاهتزاز بشكل مختلف. أفضل وحدات التحكم في الطيران ذات أجهزة الجيروسكوب المعزولة جيدًا، لأنها أقل تأثرًا بالاهتزازات التي لا مفر منها في الطائرات الرباعية عالية الأداء.
تصنيف مستشعر التيار
بالنسبة للتجميعات مع استشعار التيار المدمج، فإن اختيار التصنيف المناسب مهم لإدارة البطارية بدقة.
طائرات السباق تحتاج عادة إلى تصنيف 30-60 أمبير. وجدت أن المبالغة في التصنيف تقلل من الدقة والوضوح لهذه التجميعات الخفيفة.
طائرات الفريستايل تعمل بشكل أفضل مع تصنيف 50-100 أمبير. يمكن لتجميعات الفريستايل الخاصة بي سحب تيار كبير أثناء المناورات العدوانية، لذا فإن وجود مساحة إضافية أمر مهم.
الإعدادات ذات المدى الطويل والسينمائية تحتاج عمومًا إلى تصنيف 40-80 أمبير. هذه التجميعات تميل إلى استهلاك طاقة أكثر اتساقًا، لذا فإن الدقة أكثر أهمية من النطاق المتطرف.
الدقة (عمق البت) توفر قراءات أكثر دقة. وجدت أن مستشعرات التيار ذات الدقة العالية تحدث فرقًا ملحوظًا في دقة تحذيرات البطارية والقياس عن بعد.
تسجيل الصندوق الأسود
للتسجيل والضبط، تعتبر قدرة الصندوق الأسود ضرورية، وقد استخدمت مناهج مختلفة اعتمادًا على التجميع.
الذاكرة الداخلية (عادة 8-16 ميجابايت) مريحة ولكنها محدودة السعة. أستخدم هذا لجلسات الضبط السريعة، لكنها تمتلئ بسرعة في معدلات التسجيل العالية.
فتحات بطاقة SD توفر سعة تخزين أكبر بكثير ولكنها تضيف تعقيدًا. للعمل الجاد في الضبط، أفضل وحدات التحكم في الطيران التي تدعم بطاقة SD - القدرة على تسجيل رحلات كاملة بمعدلات عالية لا تقدر بثمن.
بعض وحدات التحكم في الطيران ليس لديها تخزين وتتطلب مسجلًا خارجيًا لبيانات الصندوق الأسود. أتجنب هذه عندما يكون ذلك ممكنًا، حيث أن المسجل الخارجي يضيف وزنًا وتعقيدًا.
ميزات الأجهزة الإضافية
على مر السنين، بدأت أقدر العديد من الميزات الأخرى التي تعزز تجربة الطيران.
العرض على الشاشة (OSD) المدمج لتغذية FPV هو شيء أعتبره الآن ضروريًا. القدرة على رؤية جهد البطارية ووقت الطيران وغيرها من المعلومات الحاسمة أثناء الطيران أنقذت العديد من طائراتي من الاصطدام أو تلف البطارية.
مقياس الضغط الجوي للحفاظ على الارتفاع يمكن أن يكون مفيدًا في حالات معينة. لا أستخدم هذه الميزة كثيرًا، ولكن عند تصوير لقطات سينمائية، يكون الحفاظ على ارتفاع موثوق به قيمًا.
مخرجات التحكم في LED لشرائط LED تجعل الطيران الليلي وتحديد الطائرة أسهل. أصبحت أميل إلى وجود مصابيح LED قابلة للعنونة على تجميعاتي - فهي ليست للعرض فقط، بل مفيدة حقًا للتوجيه وإشارة الحالة.
مخرجات الجرس للعثور على الطائرات المتحطمة وفرت علي ساعات من البحث. لم أعد أبني طائرة رباعية بدون جرس الآن - من السهل جدًا فقدان رؤية طائرة داكنة في العشب الطويل أو الأشجار.
التحكم في الكاميرا لضبط إعدادات الكاميرا أثناء الطيران هو رفاهية بدأت أقدرها. القدرة على ضبط التعرض أو الإعدادات الأخرى دون الهبوط مفيدة بشكل خاص لظروف الإضاءة المتغيرة.
البرنامج الثابت لوحدة التحكم في الطيران
البرنامج الثابت هو البرمجيات التي تعمل على أجهزة وحدة التحكم في الطيران، وتحدد قدراتها وسلوكها. لقد جربت معظم الخيارات المتاحة، ولكل منها نقاط قوة وضعف.
خيارات البرامج الثابتة الرئيسية
تتوفر العديد من خيارات البرامج الثابتة، وقد قضيت وقتًا مع كل منها لفهم خصائصها الفريدة.
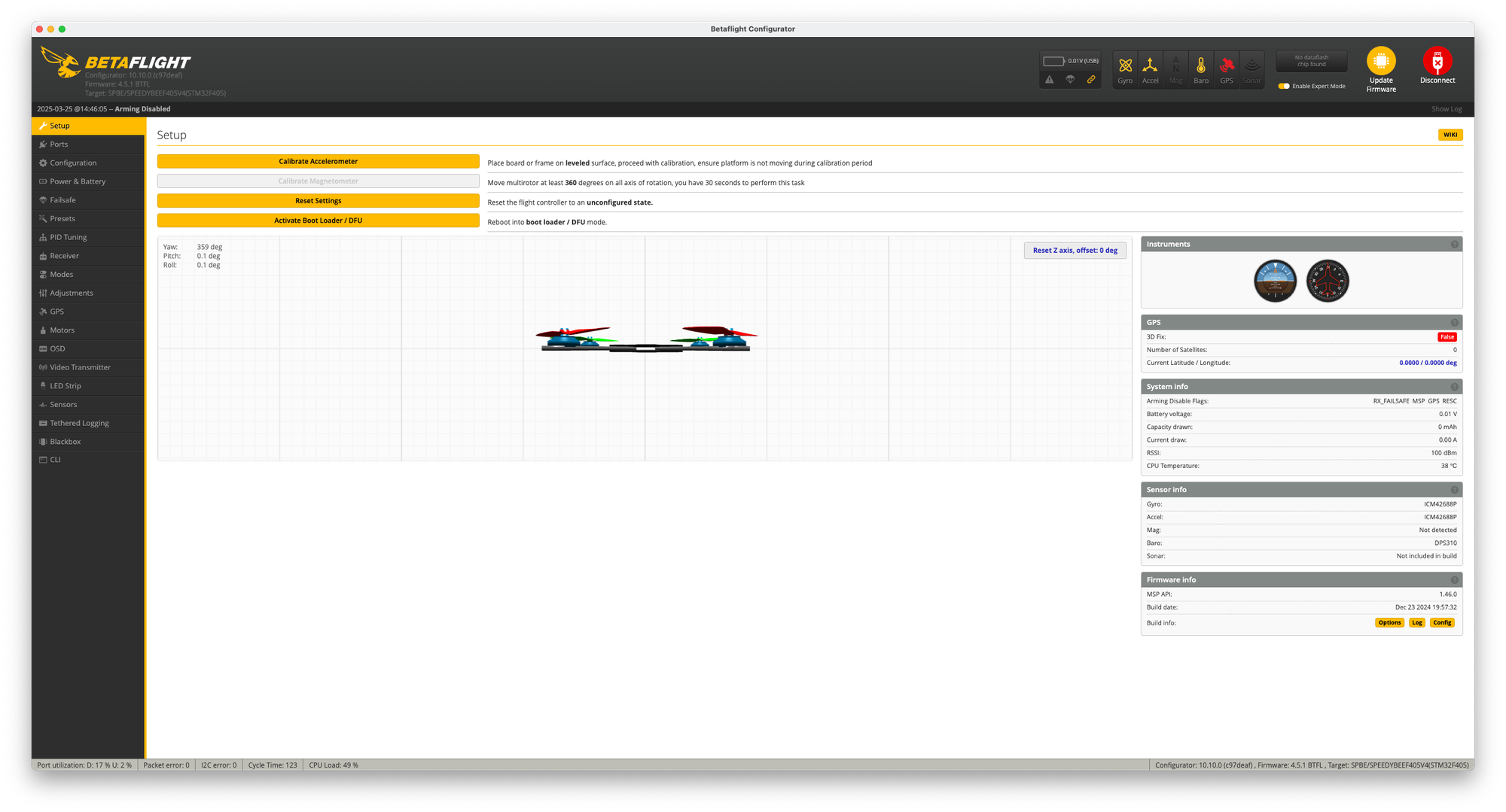
بيتافلايت
بيتافلايت هو البرنامج الثابت الأكثر شعبية لطائرات FPV، وهو ما أستخدمه في معظم تجميعاتي. يركز على أداء السباق والفريستايل، مع خصائص طيران ممتازة وتطوير نشط.
تشمل نقاط قوة Betaflight أداء الطيران المتميز، ومجتمع التطوير النشط، وقاعدة المستخدمين الكبيرة. عندما تواجهني مشكلة مع Betaflight، عادة ما أجد شخصًا قد حلها بالفعل.
وتشمل نقاط ضعفه محدودية الميزات المستقلة ومنحنى تعلم أكثر حدة. لقد قضيت ساعات لا تحصى في Betaflight Configurator لضبط الإعدادات، مما قد يكون مرهقًا للمبتدئين.
Betaflight هو الأفضل للسباقات والأسلوب الحر والطيران العام بنظام FPV. إذا كنت مهتمًا بشكل أساسي بالطيران البهلواني أو السباق، فمن الصعب التفوق عليه.
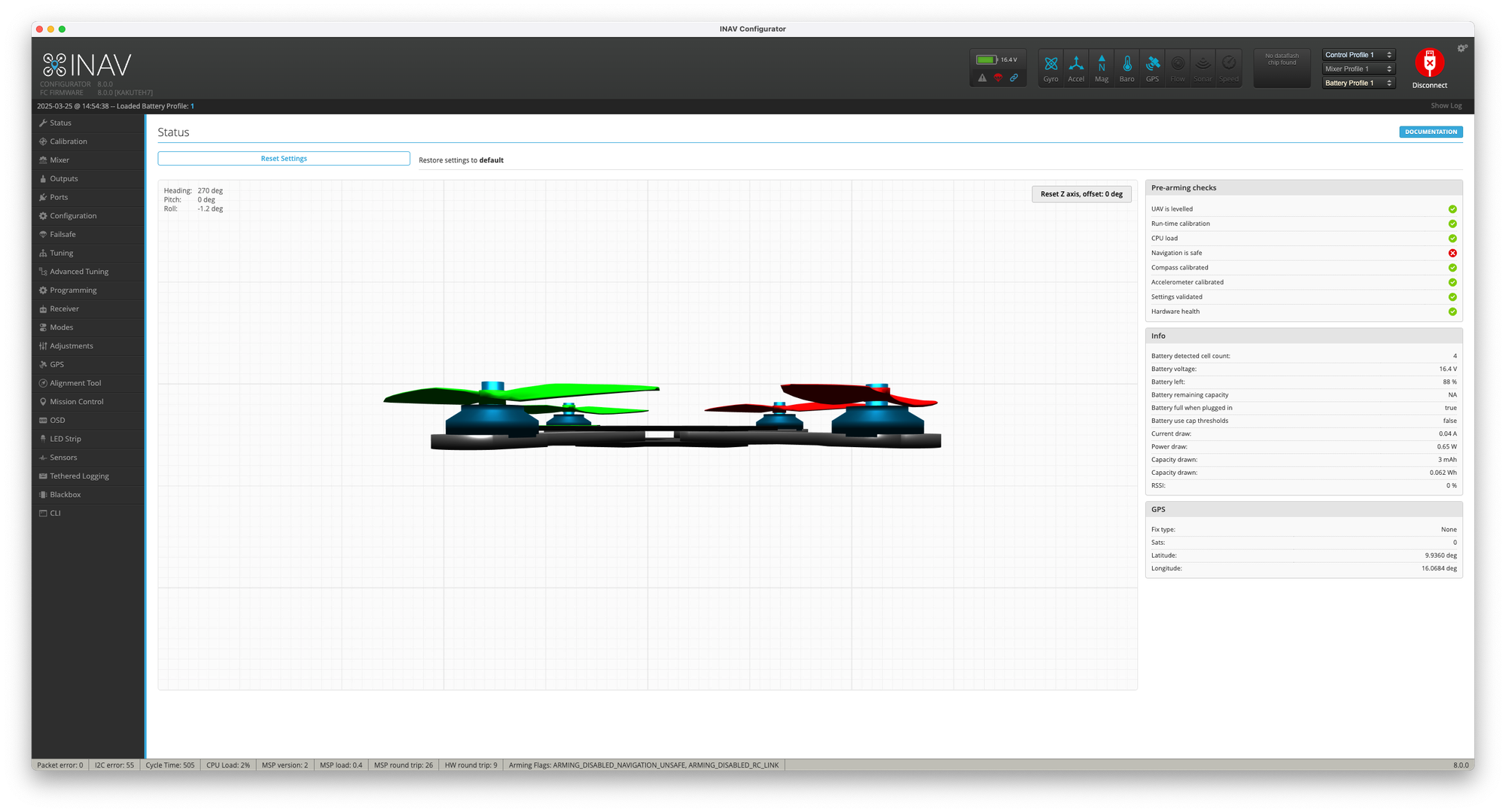
INAV
يركز INAV على ميزات الملاحة والمستقلة، وأستخدمه في تجميعات طائراتي ذات المدى الطويل والتي تستخدم لرسم الخرائط. أوضاع GPS وخاصية العودة إلى نقطة البداية وقدرات نقاط الطريق فيه ممتازة.
نقاط قوة INAV هي ميزات الملاحة الشاملة والطيران المستقل الموثوق. لقد تمكن INAV من إعادة الطائرات بدون طيار من مسافات كيلومترات عندما فقدت إشارة الفيديو.
تشمل نقاط ضعفه أنه أقل تحسينًا للطيران عالي الأداء. بينما حسّن INAV أداء الطيران البهلواني، إلا أنه لا يزال لا يضاهي Betaflight في السباقات أو الأسلوب الحر.
INAV هو الأفضل للطيران طويل المدى ورسم الخرائط والمهام المستقلة. إذا كنت مهتمًا بالاستكشاف بدلاً من البهلوانيات، فإن INAV يستحق النظر فيه.
KISS
يتخذ KISS نهجًا مبسطًا مع التركيز على الكود النظيف. لقد استخدمت KISS في بعض التجميعات، وبساطته منعشة.
تشمل نقاط قوة KISS سهولة الإعداد وخصائص طيران جيدة من البداية. لقد أعجبت بمدى قلة الضبط المطلوب للحصول على طائرة رباعية تعمل بنظام KISS وتطير بشكل جيد.
تشمل نقاط ضعفه كونه مغلق المصدر ومحدودية خيارات الأجهزة. النظام البيئي أصغر، مما يعني موارد أقل عند ظهور المشاكل.
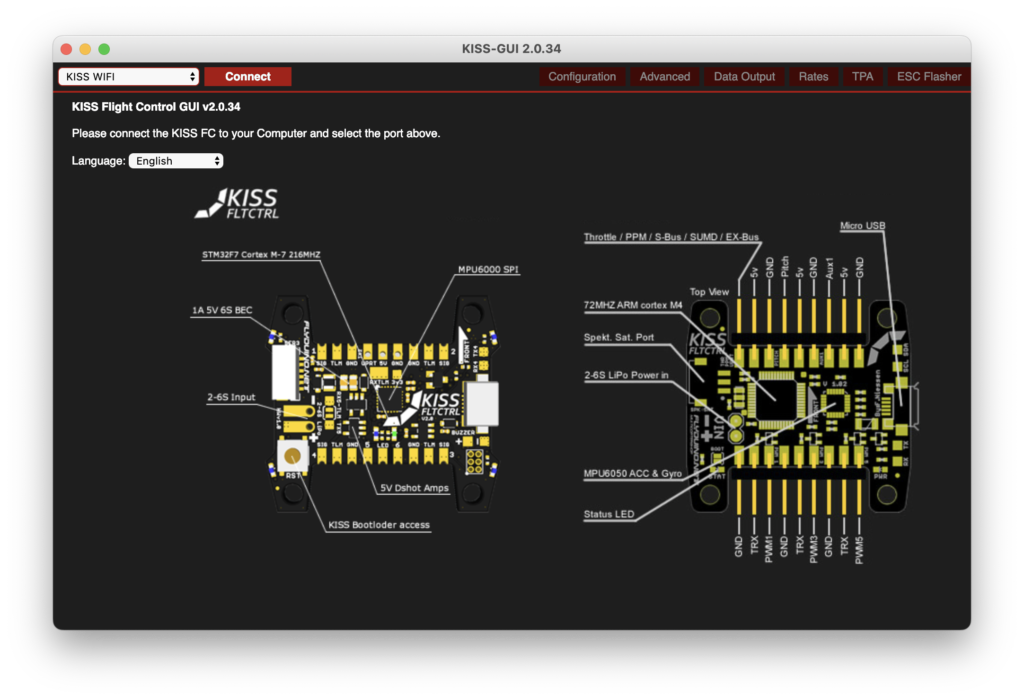
KISS هو الأفضل للطيارين الذين يسعون إلى البساطة مع الأداء الجيد. إذا كنت ترغب في قضاء المزيد من الوقت في الطيران وأقل وقت في التكوين، فإن KISS يستحق النظر فيه.
Emuflight
Emuflight هو نسخة مشتقة من Betaflight مع نهج بديل للتحكم في الطيران. لقد جربته في بعض التجميعات، خاصة للطيران السينمائي.
تشمل نقاط قوة Emuflight إحساس الطيران الفريد والأداء الجيد لأنماط طيران معينة. وجدته جيدًا بشكل خاص للأسلوب الحر السلس والمتدفق.
تشمل نقاط ضعفه مجتمعًا أصغر وتحديثات أقل تكرارًا. عند ظهور المشكلات، هناك موارد أقل متاحة مقارنة بـ Betaflight.
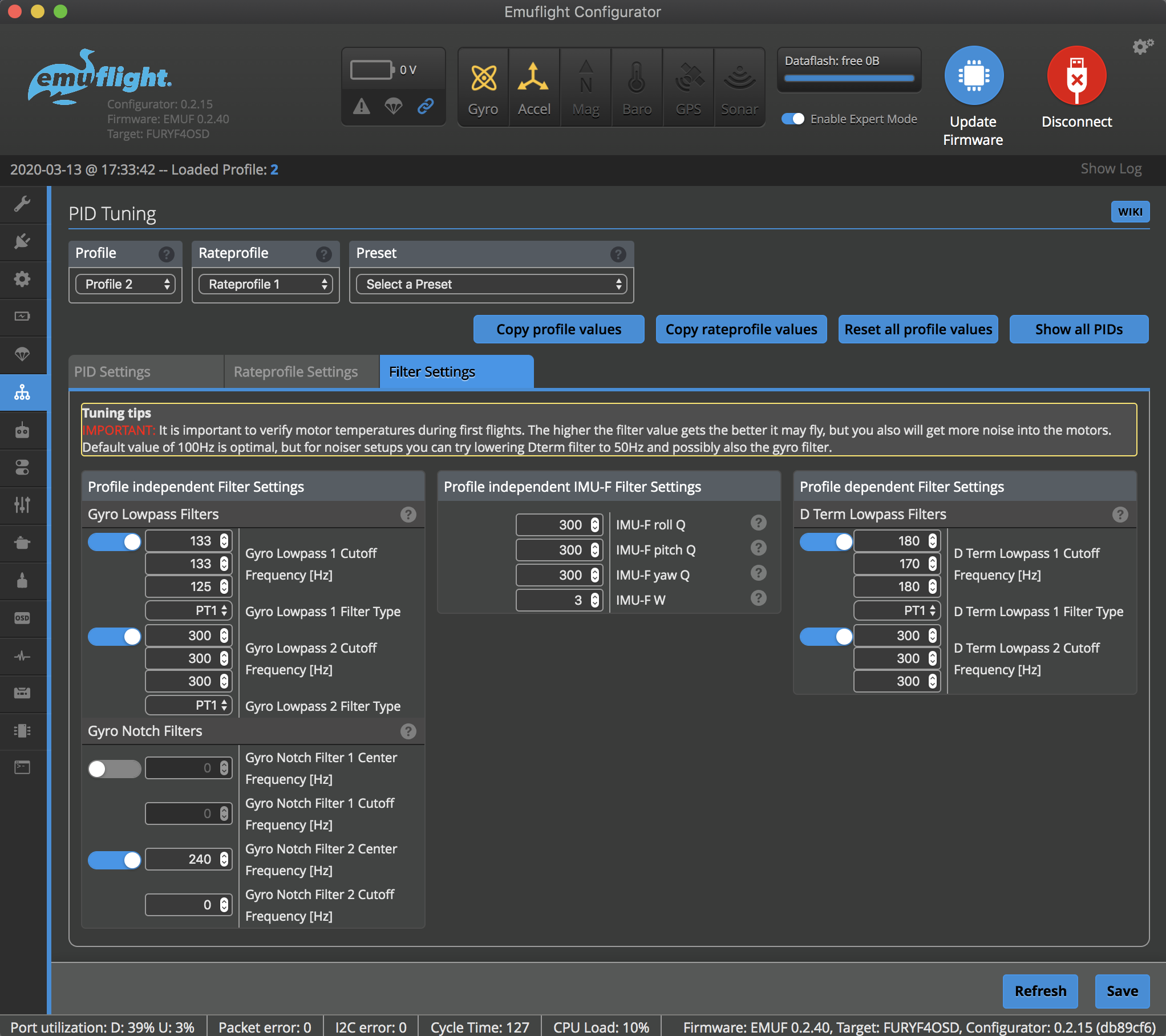
Emuflight هو الأفضل للطيارين الذين يبحثون عن خصائص طيران محددة، خاصة أولئك الذين يعطون الأولوية للسلاسة على الاستجابة المطلقة.
Ardupilot/PX4
Ardupilot و PX4 هما نظاما طيار آلي مفتوحا المصدر من الدرجة المهنية. لقد استخدمتهما في أعمال رسم الخرائط والمسح الجاد.
تشمل نقاط قوة هذه الأنظمة تخطيط المهام الشامل والميزات المهنية. مستوى القدرة المستقلة يتجاوز بكثير ما هو متاح في خيارات البرامج الثابتة الأخرى.
تشمل نقاط ضعفها الإعداد المعقد وأقل تحسينًا للرشاقة. هذه ليست أنظمة سأختارها للأسلوب الحر أو السباقات.
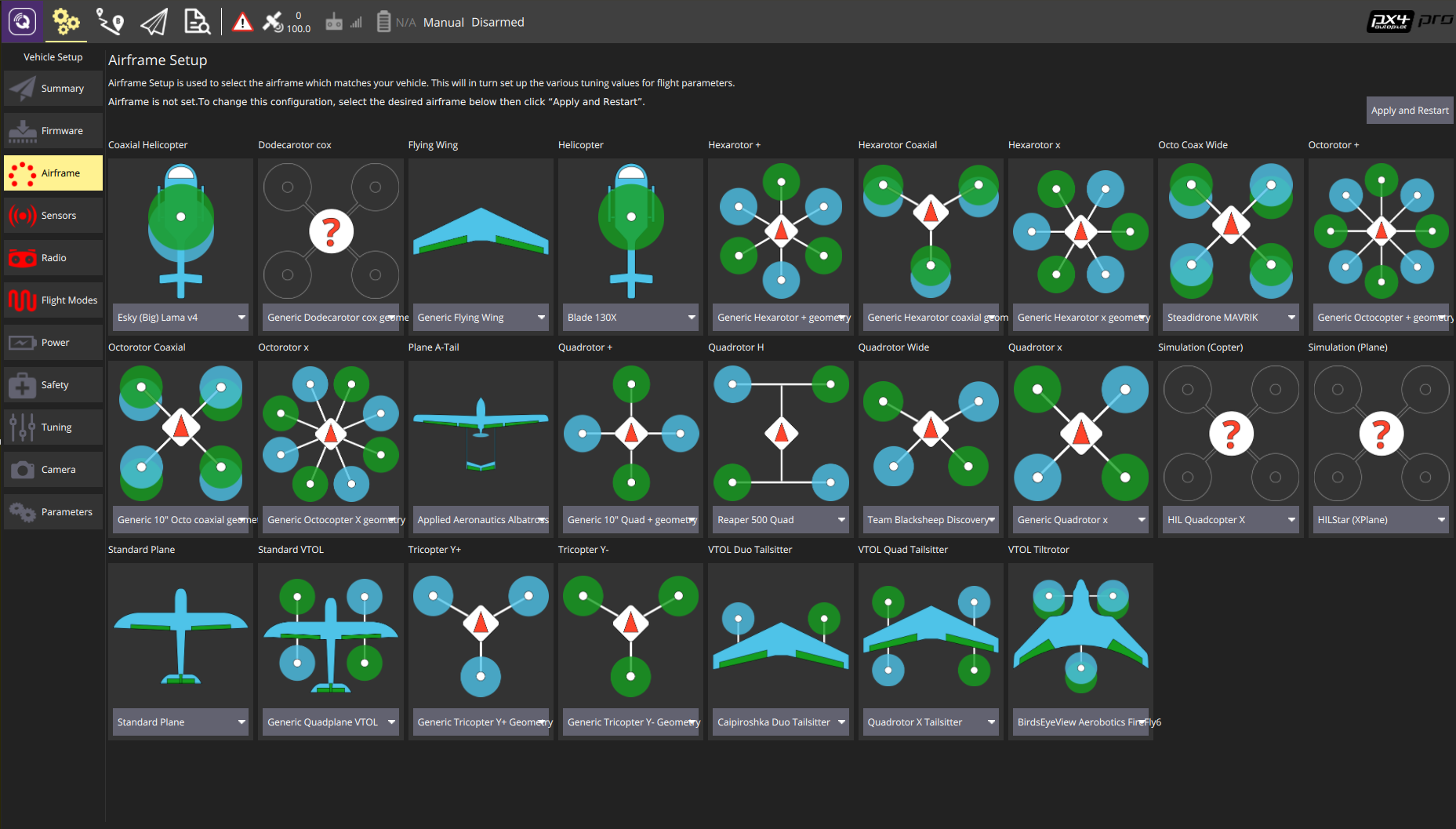
Ardupilot و PX4 هما الأفضل لرسم الخرائط وأعمال المسح والتطبيقات المهنية حيث تكون الموثوقية والقدرات المستقلة أكثر أهمية من الرشاقة.
مقارنة ميزات البرامج الثابتة
من خلال تجربتي في استخدام خيارات البرامج الثابتة المختلفة هذه، طورت إحساسًا بنقاط قوتها النسبية في مجالات مختلفة:
| الميزة | Betaflight | INAV | KISS | Emuflight | Ardupilot |
|---|---|---|---|---|---|
| وضع الأكرو | ★★★★★ | ★★★★☆ | ★★★★★ | ★★★★★ | ★★★☆☆ |
| أوضاع GPS | ★★☆☆☆ | ★★★★★ | ★★☆☆☆ | ★★☆☆☆ | ★★★★★ |
| خيارات OSD | ★★★★☆ | ★★★★☆ | ★★★☆☆ | ★★★★☆ | ★★★☆☆ |
| سهولة الإعداد | ★★★☆☆ | ★★☆☆☆ | ★★★★★ | ★★★☆☆ | ★☆☆☆☆ |
| دعم المجتمع | ★★★★★ | ★★★★☆ | ★★★☆☆ | ★★★☆☆ | ★★★★☆ |
| تكرار التحديثات | ★★★★★ | ★★★★☆ | ★★☆☆☆ | ★★★☆☆ | ★★★★☆ |
| خيارات الأجهزة | ★★★★★ | ★★★★☆ | ★★☆☆☆ | ★★★★☆ | ★★★☆☆ |
اختيار وحدة التحكم في الطيران المناسبة
يعتمد اختيار وحدة التحكم في الطيران المناسبة على احتياجاتك الخاصة ومتطلبات البناء. بعد بناء عشرات من الطائرات بدون طيار المختلفة، طورت بعض الإرشادات للتطبيقات المختلفة.
للطائرات السباقية
عند بناء طائرات السباق، أعطي الأولوية للأداء والموثوقية والبساطة. كل جرام مهم، والميزات غير الضرورية تضيف فقط وزناً.
أوصي بمعالج F4 أو F7 لمعدلات حلقة عالية. بينما يتمتع F7 بقوة معالجة أكبر، لا يزال العديد من المتسابقين البارزين يستخدمون لوحات F4 لأنها أخف وزناً وقادرة تماماً على التعامل مع متطلبات السباق.
بالنسبة للجيروسكوب، أفضل سلسلة MPU6000 أو ICM20602 للموثوقية. إشارة الجيروسكوب النظيفة أمر بالغ الأهمية للسباق، حيث يمكن أن تؤثر الاضطرابات الصغيرة على التحكم بالسرعات العالية.
يجب أن يكون الشكل 20×20 ملم للبناءات المدمجة أو 30.5×30.5 ملم للبناءات القياسية. نقلت معظم بناءات السباق الخاصة بي إلى 20×20 ملم لتوفير الوزن والمساحة.
من حيث التكامل، تنشئ مجموعة FC+ESC بناءات نظيفة مع الحد الأدنى من الأسلاك. هذا يقلل الوزن واحتمالية فشل الأسلاك، وهي شائعة في تحطم السباقات.
بالنسبة للبرامج الثابتة، أستخدم حصرياً Betaflight المُحسَّن للسباق. أصبحت الإعدادات الافتراضية أفضل بكثير، لكنني ما زلت أجري تعديلات لأسلوب طيراني المحدد.
بعض الأمثلة على وحدات التحكم في الطيران التي نجحت معها في السباق تشمل iFlight SucceX-E F4/F7، و T-Motor F7، و SpeedyBee F4/F7.
لطائرات الفريستايل
بالنسبة لطائرات الفريستايل، أعطي الأولوية للموثوقية ومجموعة شاملة من الميزات والأداء. تتعرض هذه البناءات لإساءة استخدام أكثر من أي بناءات أخرى، لذا فإن المتانة أمر أساسي.
أوصي بمعالج F7 للحصول على تصفية أفضل وميزات أكثر. تساعد قوة المعالجة الإضافية في التصفية المعقدة، وهي مهمة لنسب القوة إلى الوزن العالية الشائعة في بناءات الفريستايل.
يجب عزل الجيروسكوب جيداً للحصول على إشارة نظيفة. تتضمن مناورات الفريستايل مناورات عالية الطاقة تخلق الكثير من الاهتزازات، لذا فإن العزل الجيد يحدث فرقاً كبيراً.
مستشعر التيار الدقيق مهم لإدارة البطارية. يمكن أن يتضمن طيران الفريستايل تغييرات سريعة في الطلب على الطاقة، لذا فإن معرفة حالة البطارية أمر بالغ الأهمية.
إمكانية الصندوق الأسود عبر الفلاش المدمج أو بطاقة SD ضرورية للضبط. وجدت أن الضبط المناسب يحدث فرقاً هائلاً في أداء الفريستايل، وبيانات الصندوق الأسود هي المفتاح للضبط الجيد.
OSD كامل الميزات يوفر معلومات مهمة أثناء الطيران. أعتمد على OSD الخاص بي لإخباري بوقت الهبوط، وهو أمر يسهل نسيانه عندما تستمتع بحركات الفريستايل.
وحدات التحكم في الطيران التي كانت لدي تجارب جيدة معها للفريستايل تشمل Matek F722-SE، و Holybro Kakute F7، و Diatone Mamba F722.
لطائرات المدى الطويل/السينمائية
بالنسبة لتطبيقات المدى الطويل والسينمائية، أعطي الأولوية للموثوقية وميزات GPS وكفاءة الطاقة. تحتاج هذه البناءات إلى أن تكون جديرة بالثقة عند الطيران بعيداً عن المنزل.
أوصي بمعالج F7 للتعامل مع GPS والأجهزة الطرفية الأخرى. UARTs الإضافية وقوة المعالجة قيمة للأنظمة المتعددة الموجودة عادةً في بناءات المدى الطويل.
البارومتر مفيد لتثبيت الارتفاع والميزات ذات الصلة. عند الطيران بعيداً، يكون وجود معلومات ارتفاع موثوقة مهماً للملاحة وإدارة البطارية.
هناك حاجة إلى UARTs متعددة لـ GPS والقياس عن بُعد والتحكم في الكاميرا وما إلى ذلك. تستخدم بناءات المدى الطويل الخاصة بي عادةً 5-6 UARTs على الأقل لأنظمة مختلفة.
دعم برامج INAV الثابتة مهم لميزات الملاحة. بينما يتمتع Betaflight بإمكانيات GPS أساسية، فإن INAV متفوق بكثير لمهام الملاحة الجادة.
تصفية الطاقة النظيفة ضرورية لأوقات طيران ممتدة. يتعلق الطيران بعيد المدى بالكفاءة، وتساعد الطاقة النظيفة على زيادة وقت الطيران إلى أقصى حد.
وحدات التحكم في الطيران التي خدمتني جيداً لهذه التطبيقات تشمل Matek F765-WING، و Holybro Kakute H7، و iFlight Beast H7.
للبناءات الصغيرة
عند بناء طائرات صغيرة، أعطي الأولوية للحجم والوزن والتكامل. يجب أن يكون كل مكون صغيراً وخفيفاً قدر الإمكان.
يجب أن يكون الشكل 16×16 ملم أو 20×20 ملم ليناسب الإطارات المدمجة. لقد أذهلتني قدرات وحدات التحكم في الطيران الصغيرة هذه.
تصميمات AIO مع ESCs مدمجة تبسط البناء وتوفر المساحة. في أصغر البناءات، المكونات المنفصلة ببساطة ليست عملية.
المكونات خفيفة الوزن ضرورية للحصول على أداء طيران جيد. وحدة تحكم في الطيران ثقيلة في بناء صغير ستؤثر بشكل ملحوظ على التعامل.
تصميم مبسط مع الميزات الأساسية فقط يساعد على تقليل الوزن. غالباً ما يتم حذف ميزات مثل البارومترات و UARTs الإضافية لتوفير الوزن.
وحدات التحكم في الطيران التي استخدمتها بنجاح في البناءات الصغيرة تشمل HGLRC Zeus F4/F7 AIO، و BetaFPV F4 AIO، و NamelessRC F4/F7 AIO.
للمبتدئين
بالنسبة للمبتدئين، أوصي بإعطاء الأولوية لسهولة الاستخدام والمتانة والقيمة. من المحتمل أن تتحطم بناءاتك الأولى بشكل أكثر تكراراً، لذا فإن المرونة مهمة.
معالج F4 كافٍ للتعلم. بينما يوفر F7 المزيد من الميزات، ستوفر لوحة F4 كل ما يحتاجه المبتدئ بتكلفة أقل.
ميزات الحماية مثل الطلاء المطابق والتصميم القوي تساعد على النجاة من التحطم. أوصي دائماً المبتدئين بتطبيق طلاء مطابق إضافي على وحدات التحكم في الطيران الخاصة بهم - إنه تأمين رخيص ضد الدوائر القصيرة العرضية.
الوثائق الجيدة وموارد الدعم تجعل منحنى التعلم أسهل. يوفر بعض المصنعين وثائق أفضل بكثير من غيرهم، مما يحدث فرقاً كبيراً عندما تتعلم.
برنامج Betaflight الثابت مع إعدادات افتراضية جيدة يسمح بالنجاح دون ضبط مكثف. تحسنت الإعدادات الافتراضية بشكل كبير في السنوات الأخيرة، مما يجعل من السهل على المبتدئين تحقيق أداء طيران جيد.
الخيارات الموفرة للميزانية توفر قيمة جيدة دون ميزات مفرطة. ليست هناك حاجة لإنفاق المزيد على ميزات لن تستخدمها أثناء التعلم.
وحدات التحكم في الطيران التي أوصي بها غالباً للمبتدئين تشمل iFlight SucceX-E F4، و Matek F405-STD، و JHEMCU GHF411.
تركيب وإعداد وحدة التحكم في الطيران
التركيب والتكوين المناسبين أمران بالغا الأهمية للأداء الأمثل. لقد ارتكبت كل خطأ ممكن في هذا المجال، لذلك تعلمت ما ينجح وما لا ينجح.
تركيب الأجهزة
اعتبارات التثبيت
اتجاه وحدة التحكم في الطيران أمر بالغ الأهمية - يجب أن يشير السهم إلى الأمام، أو يمكنك تكوين اتجاه مختلف في البرنامج. لقد تعلمت التحقق من ذلك مرتين قبل كل رحلة أولى، لأنه خطأ سهل الارتكاب.
يحدث العزل الاهتزازي من خلال التركيب اللين باستخدام حلقات مطاطية أو شريط رغوي فرقاً كبيراً في أداء الطيران. أنا أستخدم التركيب اللين في جميع بناءاتي الآن - التحسن في بيانات الجايرو مذهل.
لمزيد من المعلومات التفصيلية حول عزل الاهتزاز، انظر:
تخميد اهتزاز الطائرة بدون طيار
يجب أن يكون الموقع في مركز الجاذبية ومحمياً من التحطم. أحاول وضع وحدة التحكم بالطيران في وسط الإطار، سواء للتوازن أو لتوفير أقصى قدر من الحماية.
الوصول إلى منفذ USB مهم للإعداد والتحديثات. لقد بنيت طائرات رباعية كان علي أن أفككها جزئياً لتوصيل USB - وهو خطأ لن أكرره.
التدفق الكافي للهواء لتبريد الإلكترونيات يمنع مشاكل ارتفاع الحرارة. يمكن أن ترتفع حرارة وحدات التحكم بالطيران بشكل كبير، خاصة عندما تكون مضغوطة بالقرب من ESCs وأجهزة إرسال الفيديو.
أفضل ممارسات التوصيل
يقلل التوجيه النظيف للأسلاك بعيداً عن المكونات الحساسة من التداخل. لقد وجدت أن إبقاء أسلاك الإشارة بعيدة عن أسلاك الطاقة يحدث فرقاً ملحوظاً في الأداء.
التوصيلات الآمنة من خلال اللحام المناسب أو الموصلات عالية الجودة تمنع الفشل. لقد تعرضت للكثير من حوادث التحطم بسبب التوصيلات السيئة لدرجة أنني لم أعد أختصر الطريق هنا.
تخفيف الضغط يمنع التوتر على وصلات اللحام والموصلات. رباط كابل صغير أو قطرة من الغراء الساخن يمكن أن ينقذك من المشاكل المتقطعة المحبطة.
فصل أسلاك الإشارة عن أسلاك الطاقة يقلل من الضوضاء. أحاول دائماً توجيه أسلاك الإشارة على الجانب المقابل من المجموعة من أسلاك الطاقة.
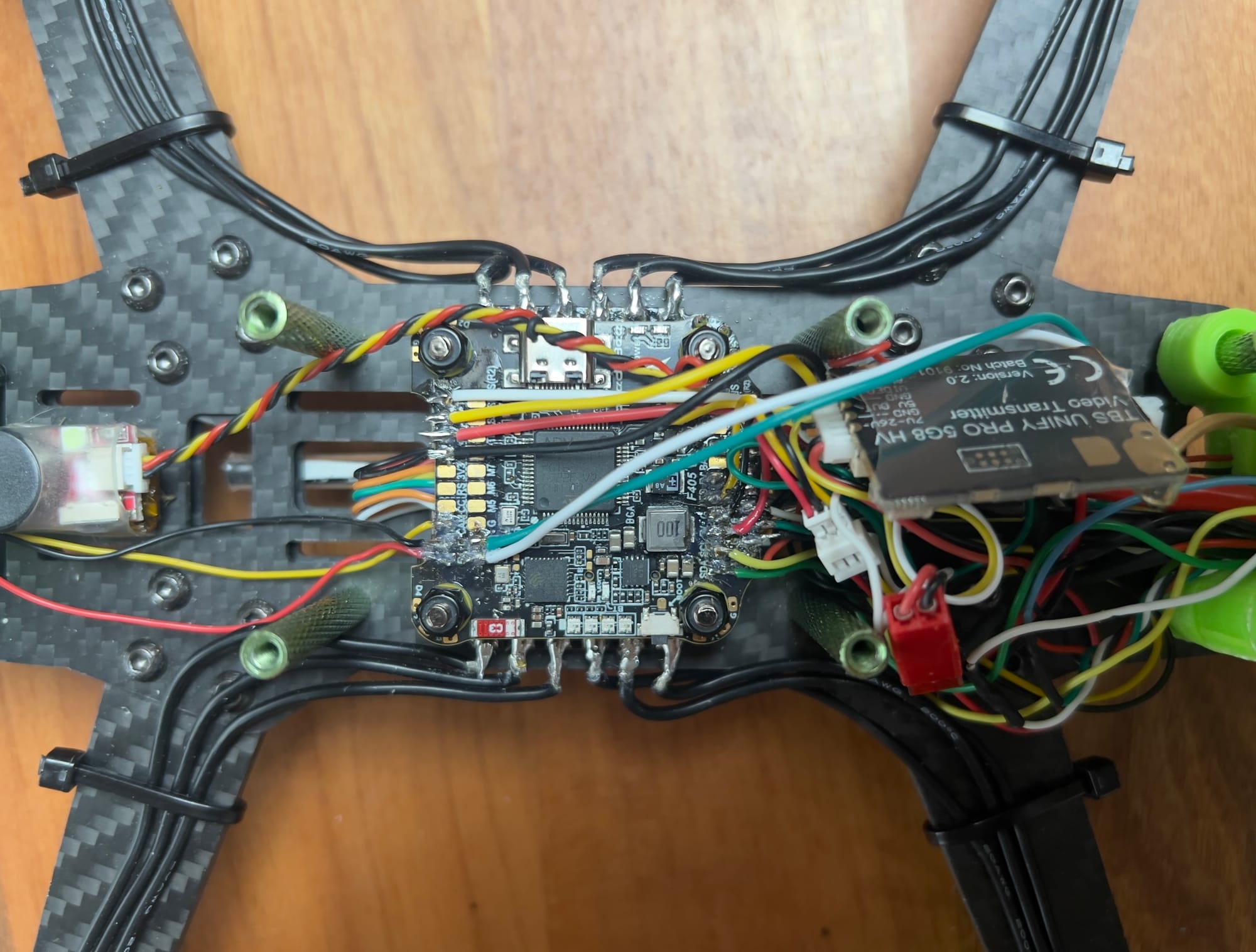
تقليل طول الأسلاك يقلل من الضوضاء والوزن. أقطع جميع الأسلاك بالطول المطلوب بالضبط - بدون حلقات إضافية أو ارتخاء.
لمزيد من المعلومات التفصيلية حول التوصيل، انظر:
دليل توصيل الطائرة بدون طيار
إعداد البرمجيات
عملية الإعداد الأولي
تتبع عملية الإعداد تسلسلاً منطقياً قمت بتحسينه عبر العديد من البناءات:
- تثبيت برنامج التكوين: أحتفظ بإصدارات منفصلة لفروع البرامج الثابتة المختلفة لتجنب مشاكل التوافق.
- توصيل وحدة التحكم بالطيران: استخدم كابل USB عالي الجودة يدعم نقل البيانات. لقد تتبعت العديد من مشاكل الاتصال الغامضة إلى كابلات USB رخيصة أو تالفة.
- تثبيت البرامج الثابتة: التحديث إلى أحدث إصدار مستقر. عادة ما أتجنب الإصدارات الحديثة جداً للبناءات التي أعتمد عليها - الاستقرار أكثر أهمية من الميزات الأحدث.
- التكوين الأساسي:
• ضبط اتجاه اللوحة الصحيح
• تكوين UARTs للأجهزة الطرفية
• إعداد بروتوكول المستقبل
• تكوين مراقبة البطارية - إعداد المستقبل:
• ربط المستقبل بجهاز الإرسال
• التحقق من تعيين القنوات
• إعداد سلوك الأمان (دائماً ما أختبر هذا قبل الطيران الأول - لقد أنقذني من الطيران غير المنضبط أكثر من مرة) - تكوين المحرك:
• التحقق من اتجاه المحرك (دائماً مع إزالة المراوح!)
• إعداد بروتوكول ESC (أوصي باستخدام DShot600 لمعظم البناءات)
• التحقق من وجود ضوضاء أو اهتزاز غير عادي - إعداد وضع الطيران:
• تكوين مفتاح التسليح
• إعداد أوضاع طيران إضافية
• أستخدم تخطيط مفاتيح متناسق عبر جميع طائراتي لتجنب الارتباك - تكوين OSD:
• تخصيص عناصر العرض على الشاشة
• وضع العناصر للرؤية
• إعداد التحذيرات والإنذارات - ضبط PID:
• البدء بالإعدادات الافتراضية أو الإعدادات المسبقة
• الضبط الدقيق حسب الحاجة بعد الرحلات الأولية
مشكلات الإعداد الشائعة وحلولها
على مر السنين، واجهت وحللت عدداً لا يحصى من مشكلات الإعداد. فيما يلي بعض المشكلات الأكثر شيوعاً وحلولها:
عدم الاتصال ببرنامج التكوين
عندما لا تتصل وحدة التحكم بالطيران ببرنامج التكوين، يمكن أن يكون ذلك محبطاً للغاية. لقد وجدت عدة أسباب محتملة:
• برامج التشغيل غير صحيحة/مفقودة: غالباً ما تكون هي المشكلة. تعلمت الاحتفاظ بمجموعة من برامج التشغيل لوحدات التحكم بالطيران المختلفة، حيث أن نظام Windows على وجه الخصوص يمكن أن يكون متقلباً.
• منافذ USB/كابلات تالفة: تسبب مشاكل اتصال غامضة. أستخدم الآن كابلات USB عالية الجودة ولدي كابل "معروف بأنه جيد" مخصص لاستكشاف الأخطاء وإصلاحها.
• مشاكل وضع محمل التمهيد: أحياناً تعلق وحدة التحكم بالطيران في وضع محمل التمهيد. لقد طورت روتيناً لتقصير دبابيس التمهيد وإعادة تدوير الطاقة لإجبارها على الدخول في الوضع الصحيح.
• منفذ COM غير صحيح: خطأ بسيط يسهل ارتكابه. أتحقق دائماً من مدير الأجهزة للتأكد من المنفذ الذي تستخدمه وحدة التحكم بالطيران.
دوران المحركات في الاتجاه الخاطئ
دوران المحركات في الاتجاه الخاطئ مشكلة شائعة لها حلول بسيطة:
• تبديل أسلاك المحرك: يمكنك تبديل أي سلكين من أسلاك المحرك لعكس الاتجاه. لقد فعلت هذا مرات لا تحصى، على الرغم من أنه يتطلب إعادة اللحام.
• تكوين BLHeli: استخدام برنامج تكوين BLHeli لعكس اتجاه المحرك أسهل إذا كنت تستخدم ESCs من نوع BLHeli. هذه هي طريقتي المفضلة لأنها لا تتطلب أي تغييرات في الأجهزة.
• التحقق قبل الطيران: تحقق دائماً من ترتيب المحرك واتجاهه في برنامج التكوين قبل الرحلة الأولى. لقد تحطمت أكثر من طائرة واحدة بتخطي هذه الخطوة.
سلوك طيران غير مستقر
عندما لا تطير طائرتك الرباعية بشكل صحيح، هناك عدة أسباب محتملة:
• اتجاه وحدة التحكم بالطيران غير صحيح: سبب شائع. قضيت ذات مرة ساعات في استكشاف سلوك غير منتظم وإصلاحه فقط لأدرك أن وحدة التحكم بالطيران كانت مدارة بزاوية 90 درجة عما تم تكوينه في البرنامج.
• مشاكل الاهتزاز: يمكن أن تسبب كل أنواع السلوك الغريب. أصبحت مؤيداً قوياً للعزل المناسب للاهتزاز بعد رؤية الفرق الكبير الذي يحدثه في أداء الطيران.
• مشاكل ضبط PID: غالباً ما تظهر كتذبذبات أو استجابة بطيئة. عندما أشك، أعيد ضبط PID إلى الإعدادات الافتراضية وأبدأ من جديد.
• ضوضاء الجايرو: يمكن أن تسبب سلوكاً متقلباً وغير متوقع. وجدت أن إعدادات الترشيح المناسبة والعزل الجيد للأجهزة يحدثان فرقاً كبيراً.
عدم اكتشاف المستقبل
عندما لا يتواصل جهاز الاستقبال مع وحدة التحكم بالطيران، تحقق من هذه المشكلات الشائعة:
• تعيين UART غير صحيح: المشكلة الأكثر شيوعاً. أتحقق دائماً من UART الذي يتصل به المستقبل وأتأكد من تكوينه بشكل صحيح في علامة التبويب Ports.
• بروتوكول مستقبل خاطئ: خطأ شائع آخر. يجب أن يتطابق البروتوكول في علامة التبويب Configuration مع نوع المستقبل الخاص بك.
• مشاكل الربط: يمكن أن تسبب فشل الاتصال. لقد تعلمت اتباع إجراءات الربط بعناية لكل نوع من أنواع أجهزة الاستقبال.
• مشاكل التوصيلات: خاصة مع توصيلات الإشارة والأرضي، يمكن أن تمنع الاتصال. أنا دائماً أتحقق من الاستمرارية باستخدام جهاز قياس متعدد إذا كنت أشك في وجود مشاكل في الأسلاك.
مواضيع متقدمة في وحدة التحكم بالطيران
بالنسبة للطيارين ذوي الخبرة الذين يتطلعون إلى تحسين إعداداتهم، توفر هذه المفاهيم المتقدمة رؤى أعمق. لقد قضيت سنوات في استكشاف هذه المجالات للحصول على أقصى استفادة من بناء طائراتي.
ضبط PID والتصفية
يكمن جوهر أداء وحدة التحكم بالطيران في ضبط PID والتصفية. هنا يلتقي الفن بالعلم في عالم FPV.
أساسيات PID
فهم وحدة تحكم PID أمر أساسي للضبط الجيد:
P (النسبي) يوفر تصحيحًا فوريًا للخطأ. أفكر في هذا كـ "قوة" التصحيح. إذا كان مرتفعًا جدًا، ستحصل على تذبذبات؛ وإذا كان منخفضًا جدًا، ستشعر أن الكواد بطيء الاستجابة.
I (التكاملي) يتراكم الخطأ بمرور الوقت. هذا يساعد على التغلب على القوى المستمرة مثل الرياح أو البناء غير المتوازن. لقد وجدت أن المبتدئين غالبًا ما يفرطون في استخدام مصطلح I - القليل منه يقطع شوطًا طويلًا.
D (المشتق) يستجيب لمعدل تغير الخطأ. هذا يخفف تصحيحات المصطلح P ويمنع التجاوز. الحصول على مصطلح D الصحيح أمر بالغ الأهمية للطيران السلس - إذا كان منخفضًا جدًا فستحصل على زوايا مرتدة، وإذا كان مرتفعًا جدًا فستحصل على محركات ساخنة.
التصفية المتقدمة
التصفية المناسبة تحدث فرقًا هائلاً في أداء الطيران:
تصفية الجيروسكوب تزيل الضوضاء قبل وصولها إلى وحدة تحكم PID. لقد تعلمت أن بيانات الجيروسكوب النظيفة تؤدي إلى أداء طيران أفضل ومحركات أبرد.
تصفية مصطلح D خاصة بالمصطلح المشتق، الذي يكون حساسًا بشكل خاص للضوضاء. أولي اهتمامًا خاصًا لهذا، حيث أن ضوضاء مصطلح D المفرطة تؤدي بسرعة إلى محركات ساخنة.
التصفية الديناميكية للضوضاء تستهدف تلقائيًا ترددات ضوضاء المحرك. كانت هذه نقطة تحول بالنسبة لي - فهي تتكيف مع مستويات الخانق المختلفة وتقلل الضوضاء بشكل كبير دون إضافة تأخير.
تصفية RPM تستخدم قياس ESC للاستهداف الدقيق للضوضاء. عندما قمت بتمكين هذا لأول مرة على بناء إشكالي، كان الفرق واضحًا - فجأة أصبح الكواد ناعمًا كالزبدة بدون محركات ساخنة.
المرشحات الثابتة تستهدف مصادر الضوضاء المعروفة بترددات ثابتة. أستخدم هذه بشكل محدود، لأنها تضيف تأخيرًا، لكنها قيمة لمعالجة مشاكل الضوضاء المحددة.
نهج ضبط المرشح
لقد تطور نهجي في ضبط المرشح بمرور الوقت:
أبدأ بالإعدادات الافتراضية أو المسبقة، والتي أصبحت أفضل بكثير في إصدارات Betaflight الأخيرة. غالبًا، تكون هذه كافية للطيران العادي.
للحصول على أداء جاد، أقوم بتحليل سجلات blackbox لتحديد خصائص الضوضاء. هذا يكشف عن ترددات محددة تحتاج إلى استهداف.
أقوم بضبط المرشحات لاستهداف ضوضاء معينة مع الحفاظ على الاستجابة. هذا توازن دقيق - الكثير من الترشيح يضيف تأخيرًا، والقليل جدًا يترك الضوضاء.
الاختبار التدريجي مع تغييرات صغيرة أمر بالغ الأهمية. أقوم بإجراء تغيير واحد في كل مرة وأختبره بشكل شامل قبل المتابعة.
المفتاح هو تحقيق التوازن بين الترشيح ومقابل التأخير والاستجابة. الترشيح المثالي مع الكثير من التأخير يشعر بشكل أسوأ من القليل من الضوضاء مع استجابة سريعة.
تسجيل وتحليل Blackbox
لقد غير تسجيل بيانات الطيران الطريقة التي أتعامل بها مع الضبط واستكشاف الأخطاء وإصلاحها:
إعداد Blackbox
تشمل خيارات التخزين الذاكرة الداخلية مقابل بطاقة SD. أفضل بطاقات SD لأعمال الضبط الجادة، لأنها توفر سعة أكبر بكثير.
معدلات التسجيل توازن بين التفاصيل والمدة. للضبط الأولي، أستخدم معدلات عالية لالتقاط المشكلات الدقيقة؛ للرحلات الأطول، أقلل المعدل.
اختيار المعلمات ذات الصلة للتسجيل يساعد في إدارة حجم الملف. أركز على بيانات الجيروسكوب وقيم PID ومخرجات المحرك لمعظم أعمال الضبط.
تحليل السجلات
تمتلك INAV وBetaflight أدواتها الخاصة لاستكشاف سجلات blackbox. لقد قضيت ساعات لا تحصى في مشاهدة هذه الرسوم البيانية، وتعلمت تفسير الأنماط.

PIDtoolbox هي أداة قوية أخرى للتحليل العميق لسجلات وحدة التحكم بالطيران.
المقاييس الرئيسية التي أبحث عنها تشمل تتبع الجيروسكوب (للضوضاء)، واستجابة PID (للضبط)، ومخرجات المحرك (للهامش). العلاقات بين هذه تخبر القصة الحقيقية لكيفية أداء الكواد الخاص بك.
يصبح تحديد المشكلات أسهل مع الخبرة. لقد تعلمت التعرف على علامات المشاكل المختلفة - الضوضاء تبدو مختلفة عن مشاكل PID، والتي تبدو مختلفة عن المشاكل الميكانيكية.
استخدام السجلات للضبط
يساعد تحليل الضوضاء في تحديد الترددات التي تتطلب ترشيحًا. أبحث عن ارتفاعات في مخطط FFT التي تتوافق مع ترددات المحرك أو توافقياتها.
تظهر استجابة الخطوة مدى سرعة استجابة الطائرة للمدخلات. أريد أن أرى استجابة سريعة دون تجاوز مفرط.
يُظهر تقييم المعامل P وجود تذبذبات أو بطء في الاستجابة. الاستجابة الجيدة للمعامل P تظهر تصحيحًا سريعًا دون الاستمرار في التأرجح ذهابًا وإيابًا.
ضوضاء المعامل D هي سبب شائع للمحركات الساخنة. أبحث عن الضوضاء المضخمة في المعامل D التي تتوافق مع قفزات إخراج المحرك.
تضمن مساحة المحرك عدم وصول المحركات إلى الحد الأقصى. أرغب في رؤية احتياطي لا يقل عن 20% في إخراج المحرك أثناء المناورات العنيفة.
واجهة سطر أوامر Betaflight والإعدادات المتقدمة
توفر واجهة سطر الأوامر خيارات تكوين قوية غير متوفرة في واجهة المستخدم الرسومية:
أوامر CLI الأساسية
diff all يُظهر جميع الإعدادات التي تختلف عن الإعدادات الافتراضية. هذا هو الأمر الذي ألجأ إليه للتحقق من التكوين الخاص بي ومشاركة الإعدادات مع الآخرين.
dump يعرض جميع الإعدادات الحالية، بما في ذلك الإعدادات الافتراضية. هذا مفيد لفهم التكوين الكامل.
get [parameter] يُظهر قيم معلمات محددة. أستخدم هذا للتحقق من الإعدادات الفردية دون الحاجة للبحث في التكوين بأكمله.
set [parameter]=[value] يغير قيم المعلمات. هذا يسمح بالتحكم الدقيق في كل جانب من جوانب وحدة التحكم في الطيران.
save يحفظ التكوين الحالي في الذاكرة. لقد تعلمت بالطريقة الصعبة استخدام هذا الأمر بعد إجراء التغييرات - نسيانه يعني فقدان كل عملك.
resource يُظهر تخصيص الموارد للدبابيس والأجهزة الطرفية. هذا ضروري للتكوين المتقدم واستكشاف الأخطاء وإصلاحها.
resource [resource_type] [index] [pin] يعيد تعيين الموارد إلى دبابيس مختلفة. لقد استخدمت هذا لتحرير الدبابيس لوظائف محددة أو للتغلب على مشكلات الأجهزة.
status يعرض معلومات حالة النظام. هذا مفيد للتحقق من الميزات النشطة وكيفية تكوين النظام.
إعادة تعيين الموارد
إعادة تخصيص الدبابيس لوظائف مختلفة هي قدرة قوية:
يمكن نقل مخرجات المحرك إلى دبابيس مختلفة. لقد استخدمت هذا للتغلب على مشكلة الوسادات التالفة في وحدات التحكم في الطيران.
إعادة تعيين UART تسمح بنقل المنافذ التسلسلية إلى دبابيس مختلفة. هذا أنقذني عندما تضررت دبابيس UART الافتراضية أو كانت مطلوبة لوظيفة أخرى.
يمكن تكوين التحكم في LED لدبابيس مختلفة. لقد استخدمت هذا لإضافة شرائط LED إلى البنيات حيث كان دبابيس LED الافتراضي غير متوفر.
يمكن إعادة تعيين الوظائف الخاصة مثل التحكم في الكاميرا ومخرجات الجرس. هذه المرونة سمحت لي بإضافة ميزات إلى البنيات التي لم تكن لتدعمها بخلاف ذلك.
تكوينات الخلاط المخصصة
بالنسبة لتخطيطات المحرك غير القياسية، فإن الخلاطات المخصصة ضرورية:
خلطات المحرك المخصصة تعدل تأثير المحرك على كل محور. لقد استخدمت هذا للبنيات غير العادية مثل الإطارات غير المتماثلة أو حوامل الكاميرا الثقيلة.
التكوينات المتخصصة مثل ثلاثية المراوح و V-tails تتطلب خلطًا مخصصًا. يعمل الخلاط الافتراضي للطائرات الرباعية القياسية، ولكن أي شيء غير عادي يحتاج إلى تخصيص.
خطية الدفع تحسن استجابة الخانق من خلال تعويض خصائص المحرك غير الخطية. هذا يجعل الخانق يشعر بمزيد من الاتساق طوال النطاق.
تجميع البرامج الثابتة وتخصيصها
بناء البرامج الثابتة المخصصة يسمح بتحسينات محددة:
لماذا تجميع البرامج الثابتة المخصصة
تمكين الميزات التجريبية يوفر الوصول إلى القدرات المتطورة. لقد قمت بتجميع البرامج الثابتة المخصصة لاختبار ميزات جديدة قبل إصدارها رسميًا.
تحسين الأجهزة المحددة يمكن أن يحسن الأداء. إزالة المكونات غير الضرورية يحرر قوة المعالجة لما هو مهم.
تخصيص الإعدادات الافتراضية يحدد نقطة البداية المفضلة لديك. أحتفظ ببناء مخصص مع إعداداتي المفضلة المضمنة.
إصلاح الأخطاء يتطلب أحيانًا تنفيذ تصحيحات قبل الإصدارات الرسمية. لقد قمت بتجميع البرامج الثابتة المخصصة لمعالجة مشكلات محددة أثرت على بنياتي.
عملية التجميع
إعداد بيئة التطوير يتطلب Git ومجموعة أدوات وتبعيات أخرى. أحتفظ بجهاز افتراضي مخصص للتطوير لهذا الغرض.
استنساخ المستودع يحصل لك على الكود المصدري للعمل معه. أتحقق دائمًا من الفرع أو العلامة المحددة التي أريد البناء منها.
تكوين البناء يتضمن اختيار الهدف والميزات. هنا يمكنك تخصيص ما يتم تضمينه في البرامج الثابتة الخاصة بك.
التجميع يبني البرامج الثابتة من المصدر. أجهزة الكمبيوتر الحديثة تجعل هذه العملية سريعة جدًا.
الفلاش يرفع البرامج الثابتة المجمعة إلى وحدة التحكم في الطيران الخاصة بك. أقوم دائمًا بعمل نسخة احتياطية من البرامج الثابتة الأصلية قبل تثبيت البنيات المخصصة.
التخصيصات الشائعة
تعديلات الهدف تسمح بإجراء تعديلات خاصة بالأجهزة. لقد قمت بتعديل الأهداف لتتطابق بشكل أفضل مع الأجهزة المحددة التي أستخدمها.
مفاتيح الميزات تمكن أو تعطل قدرات محددة. إزالة الميزات التي لا تستخدمها يحرر الموارد لما هو مهم.
تغييرات الإعدادات الافتراضية تعدل تكوين البداية. أقوم بتعيين الإعدادات الافتراضية المفضلة لدي لـ PIDs والمعدلات وإعدادات أخرى.
تحسينات الأداء تعدل لحالات استخدام محددة. بنيات السباق تستفيد من تحسينات مختلفة عن بنيات المدى الطويل.
استكشاف مشاكل وحدة التحكم في الطيران وإصلاحها
حتى أفضل وحدات التحكم في الطيران يمكن أن تواجه مشاكل. إليك كيفية تشخيص ومعالجة المشكلات الشائعة:
استكشاف الأخطاء وإصلاحها في الأجهزة
مشاكل الطاقة
عندما لا تعمل وحدة التحكم في الطيران أو تواجه إعادة تشغيل عشوائية، تحقق من هذه الأسباب الشائعة:
يجب أن يكون إخراج منظم الجهد نظيفًا ومستقرًا. أستخدم جهاز قياس متعدد للتحقق من الجهد المناسب عند نقاط الاختبار.
يجب أن يكون توصيل البطارية والجهد ضمن نطاق تشغيل وحدة التحكم في الطيران. لقد أتلفت وحدات التحكم في الطيران عن طريق توصيل بطاريات ذات جهد أعلى مما كانت مصنفة له.
إضافة أو استبدال مكثفات التصفية يمكن أن يحل العديد من المشكلات المتعلقة بالطاقة. أضيف مكثف منخفض ESR إلى كل بناء تقريبًا كتأمين رخيص ضد مشاكل الطاقة.
الدوائر القصيرة يمكن أن تسبب مشاكل طاقة غامضة. أستخدم جهاز قياس متعدد في وضع الاستمرارية للتحقق من وجود دوائر قصيرة بين الطاقة والأرض.
سعة مصدر الطاقة الكافية ضرورية، خاصة للبنيات ذات الأجهزة الطرفية المتعددة. لقد رأيت مشاكل حيث كانت وحدة التحكم في الطيران تعمل بشكل جيد بمفردها ولكنها تفشل عند توصيل جميع المكونات.
مشاكل المستشعر
عندما توفر المستشعرات قراءات غير منتظمة أو استقرارًا سيئًا:
إعادة معايرة المستشعرات غالبًا ما تحل المشكلات الطفيفة. أتأكد من أن الطائرة الرباعية مستوية تمامًا أثناء معايرة مقياس التسارع.
يمكن أن يؤثر التلف المادي على أداء المستشعر. اضطررت لاستبدال وحدات التحكم في الطيران بعد تحطمات قوية أتلفت الجيروسكوب.
تحسين عزل الاهتزاز يحدث فرقًا كبيرًا في أداء المستشعر. أستخدم التثبيت اللين في جميع بنياتي الآن.
تحديثات البرامج الثابتة تحل أحيانًا مشاكل المستشعر. لقد رأيت أخطاء في إصدارات معينة من البرامج الثابتة أثرت على قراءات المستشعر.
إذا كانت المستشعرات تالفة بشكل لا يمكن إصلاحه، فإن استبدال وحدة التحكم في الطيران هو الخيار الوحيد. أحتفظ بوحدات تحكم في الطيران احتياطية لبنياتي الأساسية لهذا السبب.
فشل الاتصال
عندما لا يتم اكتشاف الأجهزة الطرفية أو يكون الاتصال متقطعًا:
التحقق من الأسلاك والتوصيلات هو الخطوة الأولى. أستخدم عدسة مكبرة لفحص وصلات اللحام والتوصيلات الصغيرة.
التحقق من تكوينات UART يضمن تمكين البروتوكولات الصحيحة على المنافذ الصحيحة. لقد قضيت ساعات في استكشاف الأخطاء وإصلاحها فقط لأكتشف أنني قمت بتمكين الميزة الخاطئة على UART.
يمكن أن يساعد الاختبار باستخدام كابلات مختلفة في تحديد مشاكل الاتصال. أحتفظ بكابلات USB معروفة الجودة خصيصًا لاستكشاف الأخطاء وإصلاحها.
غالبًا ما تسبب المسامير أو وصلات اللحام التالفة مشاكل متقطعة. لقد أصلحت العديد من المشاكل عن طريق إعادة تدفق وصلات اللحام التي كانت تبدو جيدة للعين المجردة.
يجب أن تتطابق مستويات الإشارة والبروتوكولات بين الأجهزة. واجهت مشاكل حيث لم تتواصل أجهزة 3.3 فولت و5 فولت بشكل صحيح بسبب عدم تطابق الجهد.
استكشاف أخطاء البرمجيات وإصلاحها
مشاكل البرنامج الثابت
عندما يتعطل البرنامج الثابت أو يتجمد أو يتصرف بشكل غير متوقع:
غالبًا ما يؤدي التحديث إلى أحدث برنامج ثابت مستقر إلى حل المشكلات المعروفة. أتجنب عمومًا الإصدارات الجديدة غير المستقرة للطائرات التي أعتمد عليها.
يمكن أن تساعد تجربة إصدارات مختلفة من البرامج الثابتة في تجاوز أخطاء معينة. اضطررت إلى خفض إصدار البرنامج الثابت لتجنب المشكلات التي أثرت على إعدادي الخاص.
أحيانًا يؤدي إعادة التعيين إلى الإعدادات الافتراضية وإعادة التكوين من الصفر إلى حل المشكلات الغامضة. هذا غالبًا ما يكون أسرع من محاولة تتبع إعداد معين مشكل.
إعادة تثبيت البرنامج الثابت مع مسح الشريحة بالكامل يمحو أي إعدادات أو ذاكرة تالفة. أستخدم هذا كملاذ أخير عندما تفشل عمليات استكشاف الأخطاء الأخرى.
يمكن أن تسبب مشكلات توافق الأجهزة سلوكًا غير متوقع. أتحقق من قائمة الأهداف المدعومة قبل تحديث البرنامج الثابت.
مشاكل التكوين
عندما لا تستجيب الطائرة الرباعية بشكل صحيح للمدخلات أو لا تنشط الميزات:
التحقق من جميع إعدادات التكوين مملٌ ولكنه فعال. أقوم بالمرور عبر كل علامة تبويب في أداة التكوين بشكل منهجي.
غالبًا ما تؤدي إعادة التعيين إلى الإعدادات الافتراضية وإعادة التكوين إلى حل المشكلات المتعلقة بالإعدادات المتضاربة. في بعض الأحيان يكون ذلك أسرع من محاولة العثور على المشكلة المحددة.
التحقق من تعيينات مفتاح الوضع يضمن تنشيطها كما هو متوقع. أستخدم علامة تبويب جهاز الاستقبال للتحقق من التعرف على مواضع المفاتيح بشكل صحيح.
التحقق من تخطيط قناة جهاز الاستقبال أمر بالغ الأهمية للتحكم المناسب. واجهت مشكلات حيث تم تعيين القنوات بشكل غير صحيح، مما تسبب في سلوك غريب.
يمكن أن يساعد تصدير ومراجعة التكوين في تحديد المشكلات. أقارن التكوينات بين الطائرات العاملة وغير العاملة لاكتشاف الاختلافات.
مشاكل ضبط الأداء
عندما تتذبذب الطائرة الرباعية، أو تستجيب ببطء، أو تعمل المحركات بحرارة عالية:
إعادة تعيين إعدادات PID إلى الإعدادات الافتراضية توفر نقطة بداية معروفة. أفعل هذا كلما أجريت تغييرات كبيرة على الطائرة.
التحقق من إعدادات الفلتر يضمن أنها مناسبة لطائرتك. التصفية الزائدة تسبب تأخيرًا؛ والقليل جدًا منها يترك ضوضاء.
التحقق من المشكلات الميكانيكية مثل المكونات المفكوكة أو المراوح التالفة أمر ضروري. لقد واجهت مشكلات ضبط كانت ناتجة في الواقع عن إطار متصدع.
تحليل سجلات الصندوق الأسود يوفر رؤى حول مشكلات محددة. هذه هي أقوى أداة لاستكشاف الأخطاء لمشاكل الأداء.
تطبيق الإعدادات المسبقة المناسبة لنوع الطائرة غالبًا ما يحل المشكلات الشائعة. الإعدادات المسبقة في إصدارات Betaflight الأخيرة جيدة جدًا.
متى يجب استبدال وحدة التحكم بالطيران
في بعض الأحيان، يكون الاستبدال هو الخيار الوحيد. أقوم باستبدال وحدات التحكم بالطيران عندما:
الضرر المادي يؤثر على الأداء، خاصة للمكونات الحرجة مثل الجيروسكوب أو المعالج. لقد حاولت إنقاذ اللوحات التالفة، لكن نادرًا ما يستحق الجهد.
فشلت أجهزة الاستشعار أو أصبحت غير موثوقة. وحدة تحكم بالطيران ذات جيروسكوب غير موثوق به خطيرة للطيران.
مشكلات المعالج أو الذاكرة تسبب عدم استقرار. إذا كانت وحدة التحكم بالطيران تعيد التشغيل أو تتجمد بشكل عشوائي، فقد حان وقت الاستبدال.
الترقية للوصول إلى ميزات جديدة قد تتطلب أحيانًا أجهزة جديدة. لقد استبدلت وحدات تحكم بالطيران تعمل بشكل جيد للوصول إلى ميزات تتطلب أجهزة أحدث.
بعد تلف كبير بسبب الماء أو الكهرباء، غالبًا ما يكون الاستبدال أكثر أمانًا من الإصلاح. تعلمت هذا الدرس بعد محاولة إنقاذ وحدة تحكم بالطيران تعرضت للبلل - عملت لفترة، ثم فشلت بشكل كارثي أثناء الطيران.
الاتجاهات المستقبلية في وحدات التحكم بالطيران
يستمر مشهد وحدات التحكم بالطيران في التطور بسرعة. فيما يلي ما أراه يتجه نحوه:
تطورات الأجهزة
أصبحت معالجات H7 والمعالجات الأكثر قوة هي المعيار الجديد. لقد كنت أختبر وحدات تحكم بالطيران H7، وفي حين أن الاختلافات دقيقة الآن، فإنها توفر مساحة للميزات المستقبلية.
ستعزز أجهزة الاستشعار المحسنة ذات مستويات الضوضاء المنخفضة أداء الطيران. يتحسن كل جيل من أجهزة الجيروسكوب في رفض الضوضاء مع الحفاظ على الحساسية.
التكامل يتزايد، مع المزيد من الحلول الشاملة. سيستمر الاتجاه نحو مجموعات طيران متكاملة للغاية، مما يجعل الطائرات أنظف وأبسط.
يستمر تقليل الحجم، مع أصغر وأخف المكونات. أنا مندهش من مقدار الوظائف التي تناسب وحدات التحكم بالطيران الحديثة مقاس 16×16مم.
تحسينات كفاءة الطاقة توفر أداء أفضل لكل واط. هذا مهم بشكل خاص لطائرات المدى الطويل والتحمل.
ابتكارات البرمجيات
التعلم الآلي للضبط التكيفي والتصفية في الأفق. لقد رأيت تجارب مبكرة مع الضبط القائم على التعلم الآلي الذي يُظهر وعدًا بتحسين الأداء تلقائيًا.
ميزات الاستقلالية المتقدمة تتحسن، مع قدرات نظام تحديد المواقع العالمي والملاحة الأفضل. تضيق الفجوة بين قدرات الطائرات بدون طيار الهواة والمهنية.
الإعداد المبسط مع تكوين أكثر سهولة يجعل الهواية أكثر سهولة. منحنى التعلم يصبح أقل حدة مع كل جيل من البرامج الثابتة.
تظهر خيارات البرامج الثابتة المتخصصة المصممة لأساليب طيران محددة. نشهد المزيد من التباعد بين برامج السباق، والطيران الحر، والمدى الطويل.
الإعدادات الافتراضية المحسنة تعني تجربة خارج الصندوق أفضل. تطير وحدات التحكم بالطيران الحديثة بشكل رائع بالإعدادات الافتراضية.
التقنيات الناشئة
رؤية الكمبيوتر للملاحة المستندة إلى الكاميرا وتجنب العقبات أصبحت أكثر سهولة. لقد جربت أنظمة رؤية أساسية، وهي تصبح أكثر عملية للاستخدام كهواية.
الشبكات المتداخلة تمكّن الاتصال بين الطائرات بدون طيار. هذا يفتح إمكانيات للطيران المنسق وتحسين السلامة.
القياس عن بعد المتقدم يوفر بيانات طيران أكثر شمولاً. يستمر زيادة كمية المعلومات المتاحة للطيارين.
تكامل السحابة لتكوين وتحليل البيانات أصبح أكثر شيوعًا. تظهر منصات عبر الإنترنت لمشاركة وتحليل بيانات الطيران.
تكامل المحاكاة مع التوائم الرقمية يسمح بالاختبار في البيئات الافتراضية. استخدمت المحاكاة لاختبار التكوينات قبل تطبيقها على الأجهزة الحقيقية.
الأسئلة الشائعة: أسئلة شائعة حول وحدات التحكم بالطيران
على مر السنين، تلقيت أسئلة لا حصر لها حول وحدات التحكم بالطيران. فيما يلي الأسئلة الأكثر شيوعًا:
ما الفرق بين وحدات التحكم بالطيران F4 وF7؟
تشير F4 وF7 إلى سلسلة معالج STM32 المستخدمة في وحدة التحكم بالطيران. من خلال تجربتي، الاختلافات الرئيسية هي:
معالجات F7 أكثر قوة (عادة 216-400 ميجا هرتز مقابل 168-216 ميجا هرتز لـ F4)، مما يسمح بمعدلات حلقة أعلى، وتصفية أكثر تعقيدًا، وميزات إضافية. ألاحظ الفرق أكثر في المواقف الصعبة مع الكثير من التصفية.
وحدات تحكم F7 عادة ما يكون لديها المزيد من منافذ UART وأداء أفضل بشكل عام. هذا مهم عند توصيل وحدات طرفية متعددة مثل نظام تحديد المواقع العالمي، والقياس عن بعد، والتحكم في الكاميرا.
وحدات تحكم F4 أكثر بأسعار معقولة ولا تزال كافية لمعظم أنماط الطيران. لا تزال العديد من طائراتي تستخدم لوحات F4 لأنها توفر توازنًا رائعًا بين الأداء والتكلفة.
بالنسبة لمعظم الطيارين، يعتبر المتحكم F4 مناسبًا تمامًا، ولكن إذا كنت تدفع حدود الأداء أو تحتاج إلى توصيل العديد من الأجهزة الطرفية، فإن الترقية إلى F7 تستحق الاستثمار.
كيف أعرف ما إذا كان متحكم الطيران الخاص بي تالفًا؟
علامات تلف متحكم الطيران تشمل:
الفشل في التشغيل أو الاتصال عبر USB هي العلامة الأكثر وضوحًا. إذا لم يعمل متحكم الطيران أو لم يتم التعرف عليه من قبل جهاز الكمبيوتر، فهناك خطأ ما.
قراءات المستشعر غير المنتظمة أو الانجراف قد تشير إلى تلف الجيروسكوب. لقد شاهدت هذا بعد حوادث التحطم القوية - تصبح الطائرة الرباعية غير قابلة للطيران بسبب الحركات العشوائية.
إعادة التشغيل غير المتوقعة أو التجمد يشير إلى مشاكل في المعالج أو الذاكرة. إذا كانت طائرتك تنزع سلاحها بشكل عشوائي أثناء الطيران، فقد يكون متحكم الطيران فاشلاً.
الدخان أو الضرر المرئي للمكونات هو مؤشر واضح. لقد أطلقت الدخان السحري من أكثر من متحكم طيران واحد.
ارتفاع درجة الحرارة أثناء التشغيل يمكن أن يشير إلى تلف داخلي أو دوائر قصيرة. إذا أصبح متحكم الطيران الخاص بك ساخنًا بشكل غير عادي، فهناك خطأ ما.
الأخطاء المستمرة في برنامج التكوين غالباً ما تشير إلى مشاكل في الأجهزة. إذا كنت ترى نفس الخطأ بشكل متكرر على الرغم من إعادة تحميل البرامج الثابتة، فاشتبه في مشاكل الأجهزة.
الفشل في التسليح أو الحفاظ على طيران مستقر رغم التكوين المناسب يشير إلى مشاكل في المستشعر. لقد كان لدي متحكمات طيران اجتازت جميع الاختبارات على الطاولة لكنها فشلت في الجو.
ما هو أفضل متحكم طيران للمبتدئين؟
بالنسبة للمبتدئين، أوصي بمتحكمات الطيران التي تكون:
موثوقة ومدعومة جيدًا، مثل iFlight SucceX-E F4 أو Matek F405-STD. هذه اجتازت اختبار الزمن ولديها مجتمعات مستخدمين كبيرة.
بأسعار معقولة (حوالي 30-40 دولارًا) لتحقيق التوازن بين الجودة والقيود المالية. ليست هناك حاجة للإنفاق على ميزات متطورة أثناء التعلم.
متوافقة مع Betaflight للإعداد السهل والتوثيق الواسع. نظام Betaflight البيئي لديه معظم الموارد للمبتدئين.
موثقة جيدًا مع دعم مجتمعي جيد للمساعدة في حل المشكلات. عندما تواجه حتماً مشاكل، يكون وجود موارد للمساعدة أمراً لا يقدر بثمن.
متينة بما يكفي للبقاء بعد تحطم التعلم. أبحث عن لوحات بطلاء مطابق وتصميم قوي.
تشمل الميزات الأساسية دون تعقيد مربك. ميزات مثل OSD ومراقبة التيار مفيدة، لكن الميزات المتقدمة يمكن أن تنتظر.
معالجات F4 كافية عادة للمبتدئين، مع كون F7 خياراً لأولئك الذين يرغبون في مزيد من المجال للنمو. بدأت بمعالجات F1 وكنت سعيدًا تمامًا حتى عرفت بما فيه الكفاية لتقدير مزايا الأجهزة الأكثر تقدمًا.
هل يمكنني استخدام أي متحكم طيران مع أي ESC؟
يمكن لمعظم متحكمات الطيران الحديثة العمل مع معظم وحدات ESC، ولكن هناك اعتبارات للتوافق:
دعم البروتوكول أمر بالغ الأهمية - تأكد من أن FC و ESCs تدعم نفس البروتوكولات (DShot، Multishot، إلخ). أفضل DShot600 لمعظم البنايات، حيث يوفر توازنًا جيدًا بين الأداء والموثوقية.
توافق الجهد الكهربائي مهم - تحقق من أن FC يمكنه التعامل مع الجهد المقدم من ESCs/PDB. لقد أتلفت متحكمات طيران بتوصيلها بجهد أعلى مما كانت مصنفة له.
التوصيلات الفيزيائية تختلف بين الأسلاك الفردية وكابلات الشريط. تأكد من أن FC و ESCs لديها طرق اتصال متوافقة.
بالنسبة لمكدسات FC/ESC، تأكد من أنها مصممة للعمل معًا. بينما مزج وتطابق ممكن، المكدسات المصممة كوحدة عادة ما توفر تكاملًا أفضل.
بشكل عام، يمكن لأي FC جيد العمل مع أي ESC جيد إذا تم تكوينه بشكل صحيح، لكن تطابق المكونات غالبًا ما يوفر أفضل تجربة. أفضل استخدام مكونات من نفس الشركة المصنعة عندما يكون ذلك ممكنًا، لأنها مصممة للعمل معًا.
كم مرة يجب أن أقوم بتحديث البرامج الثابتة لمتحكم الطيران؟
لا يوجد جدول زمني ثابت لتحديثات البرامج الثابتة، لكنني أتبع هذه الإرشادات:
إذا كان كل شيء يعمل بشكل جيد، لا تشعر بالالتزام بالتحديث على الفور. المثل القديم "إذا لم يكن معطلاً، فلا تصلحه" ينطبق هنا.
قم بالتحديث للحصول على ميزات جديدة عندما يحتوي الإصدار على قدرات تريدها. قمت بالتحديث إلى Betaflight 4.3 خصيصًا لتحسين تصفية RPM.
قم بالتحديث لإصلاح الأخطاء إذا كنت تواجه مشكلات تمت معالجتها في إصدار جديد. أتحقق من ملاحظات الإصدار لمعرفة ما إذا كانت تعالج المشكلات التي أواجهها.
بالنسبة للإصدارات الرئيسية، أنتظر بضعة أسابيع بعد الإصدار للحصول على تعليقات المجتمع. دع الآخرين يجدون الأخطاء أولاً.
تجنب التحديث قبل السباقات أو الرحلات المهمة مباشرة. لقد تعلمت هذا الدرس بطريقة صعبة - يمكن أن يؤدي التحديث في اللحظة الأخيرة إلى مشاكل غير متوقعة.
احتفظ دائمًا بنسخة احتياطية من التكوين قبل التحديث، وكن مستعدًا لقضاء وقت في إعادة التكوين بعد التحديثات الكبيرة. أحتفظ بملاحظات حول إعداداتي المحددة لكل طائرة رباعية لجعل هذه العملية أسهل.
ما الذي يسبب ضوضاء جيروسكوب متحكم الطيران؟
يمكن أن تأتي ضوضاء الجيروسكوب من عدة مصادر:
الاهتزاز الميكانيكي من المحركات أو المراوح أو رنين الإطار هو السبب الأكثر شيوعًا. لقد وجدت أن التوازن السليم للمراوح والمحركات يحدث فرقًا كبيرًا.
الضوضاء الكهربائية من ESCs أو أنظمة الطاقة أو الأسلاك يمكن أن تؤثر على قراءات الجيروسكوب. إبقاء أسلاك الإشارة بعيدة عن أسلاك الطاقة يساعد على تقليل ذلك.
قيود المستشعر تخلق مستوى ضوضاء متأصل. نماذج الجيروسكوب المختلفة لها خصائص ضوضاء مختلفة.
مشاكل التركيب مثل العزل السيئ أو التركيب الصلب تنقل الاهتزازات مباشرة إلى الجيروسكوب. أستخدم التركيب اللين على جميع بناياتي الآن.
المكونات التالفة يمكن أن تسبب زيادة الضوضاء. الجيروسكوب الذي تعرض لتحطمات قوية قد يطور مستويات ضوضاء أعلى.
تقليل الضوضاء يتضمن عادة عزل اهتزاز أفضل، وتحسين الأسلاك، ومكونات ذات جودة، وإعدادات تصفية مناسبة. أعالج المشاكل الميكانيكية أولاً، ثم أستخدم تصفية البرمجيات للتعامل مع الضوضاء المتبقية.
هل يمكنني نقل الإعدادات بين متحكمات الطيران؟
نعم، ولكن مع قيود:
الإعدادات تنتقل بشكل أفضل بين نفس نوع البرامج الثابتة (مثل Betaflight إلى Betaflight). لقد حصلت على نتائج متفاوتة عند محاولة نقل الإعدادات بين أنواع البرامج الثابتة المختلفة.
الأجهزة المتشابهة توفر نتائج أفضل عند نقل الإعدادات. الانتقال من لوحة F4 إلى لوحة F4 مماثلة أخرى عادة ما يعمل بشكل جيد.
استخدام أمر diff all لحفظ الإعدادات هو الطريقة الأكثر موثوقية. أحفظ هذا الناتج في ملف نصي لكل بناء من بناياتي.
ميزات النسخ الاحتياطي في برنامج التكوين تعمل بشكل جيد للأجهزة المتطابقة. هذا مريح ولكنه أقل مرونة من أوامر CLI.
بعض الإعدادات تحتاج دائمًا إلى تعديل يدوي للأجهزة الجديدة. تعيينات الموارد، على وجه الخصوص، خاصة بالأجهزة ولا تنتقل بشكل جيد.
راجع دائمًا الإعدادات المنقولة بعناية، لأن التكوينات غير الصحيحة يمكن أن تسبب سلوكًا غير متوقع أو تحطم. أمر على كل علامة تبويب في برنامج التكوين بعد نقل الإعدادات للتحقق من أن كل شيء يبدو صحيحًا.
ما الفرق بين تصفية الجيروسكوب بالأجهزة والبرمجيات؟
التمييز مهم لفهم كيفية تحسين الأداء:
تصفية الأجهزة يتم تنفيذها في مستشعر الجيروسكوب نفسه، مما يوفر تقليل الضوضاء الأولي قبل وصول الإشارة إلى المعالج. هذا يختلف بين نماذج الجيروسكوب ولا يمكن تعديله في البرامج الثابتة.
تصفية البرمجيات يتم تنفيذها في البرامج الثابتة لمتحكم الطيران ويمكن تخصيصها من خلال التكوين. وهذا يشمل مرشحات الشق الديناميكية، ومرشحات الترددات المنخفضة، والتصفية المعتمدة على RPM.
تستخدم وحدات التحكم في الطيران الحديثة مزيجًا من كلا النهجين. أعتمد على التصفية الأجهزة كخط الدفاع الأول، ثم أستخدم التصفية البرمجية لمعالجة خصائص الضوضاء المحددة في بنائي.
ميزة التصفية البرمجية هي المرونة - يمكن ضبطها للبناءات وأساليب الطيران المحددة. العيب هو أنها تستخدم قدرة المعالجة ويمكن أن تسبب تأخيرًا في الاستجابة.
الخلاصة
وحدة التحكم في الطيران هي حقًا دماغ طائرة FPV الخاصة بك، حيث تترجم نواياك إلى طيران دقيق. بعد سنوات من البناء والطيران، أصبحت أقدر مدى أهمية هذا المكون للتجربة الشاملة.
فهم تكنولوجيا وحدة التحكم في الطيران، ومعايير الاختيار، وخيارات التكوين يسمح لك بتحسين الأداء وفقًا لاحتياجاتك المحددة وأسلوب طيرانك. سواء كنت تبني طائرتك الأولى أو الخمسين، فإن اختيار وحدة التحكم في الطيران المناسبة وتهيئتها بشكل صحيح سيكون له تأثير عميق على تجربة طيرانك.
التكنولوجيا تستمر في التطور بسرعة، مع معالجات أكثر قوة، وأجهزة استشعار أفضل، وبرامج ثابتة أكثر تطورًا توفر منصات ذات قدرات متزايدة. من خلال إتقان إعداد وضبط وحدة التحكم في الطيران، ستطلق العنان للإمكانات الكاملة لطائرتك، وتحقق التوازن المثالي بين الاستقرار والاستجابة والميزات لأسلوب طيرانك الفريد.
لقد تحطمت طائرات أكثر مما أرغب في الاعتراف به في رحلتي لفهم هذه الأجهزة المعقدة، لكن كل فشل علمني شيئًا قيمًا. الرضا عن طائرة مضبوطة بشكل مثالي تستجيب تمامًا كما هو مقصود يجعل كل عمليات استكشاف الأخطاء وإصلاحها تستحق العناء. ليس هناك شيء مثل شعور طائرة تشعر وكأنها امتداد لأفكارك، ووحدة التحكم في الطيران هي ما يجعل ذلك ممكنًا.


