Drone ESCs: Princípios e Operação
Os Controladores Eletrônicos de Velocidade (ESCs) são o elo vital entre o seu controlador de voo e os motores, traduzindo comandos digitais na entrega precisa de energia que mantém seu drone no ar. Após anos construindo e testando centenas de drones, passei a apreciar que esses dispositivos sofisticados são muito mais do que simples drivers de motor—eles são componentes ricos em recursos com seus próprios processadores, firmware e capacidades que podem fazer ou quebrar sua experiência de voo. Aprendi da maneira mais difícil que uma falha do ESC significa mais do que apenas um drone acidentado; muitas vezes significa uma longa caminhada por terrenos difíceis para recuperar o que sobrou do seu orgulho e alegria.
Este guia abrangente explora a tecnologia ESC, protocolos, opções de firmware, critérios de seleção e recursos avançados com base na minha extensa experiência prática. Compartilharei não apenas as especificações técnicas, mas os insights práticos que obtive através de inúmeras construções, acidentes e sessões de solução de problemas para ajudá-lo a entender e otimizar este componente crítico do seu drone FPV.
Introdução aos Controladores Eletrônicos de Velocidade
Um ESC é um circuito eletrônico que controla e regula a velocidade de um motor sem escova. Ainda me lembro da minha primeira construção com ESCs primitivos que mal mantinham os motores girando consistentemente—muito diferente dos dispositivos sofisticados que usamos hoje. Em drones FPV, os ESCs desempenham várias funções críticas que passei a apreciar mais a cada construção:
- Controle do Motor: Convertendo energia DC da bateria na energia AC trifásica necessária para motores sem escova. Vi a diferença entre ESCs baratos que produzem operação de motor áspera e barulhenta e os de qualidade que fornecem energia suave e precisa.
- Regulação de Velocidade: Controlando precisamente o RPM do motor com base nos comandos do controlador de voo. A capacidade de resposta do seu drone depende muito da rapidez com que seus ESCs podem ajustar a velocidade do motor—algo que percebo imediatamente ao testar uma nova construção.
- Frenagem: Desacelerando ativamente ou parando os motores quando necessário. Achei isso particularmente importante para voos estilo livre, onde paradas rápidas e mudanças de direção são essenciais.
- Proteção da Bateria: Monitorando a voltagem e implementando cortes para evitar danos. Salvei inúmeras baterias da morte precoce graças à proteção adequada contra baixa voltagem.
- Telemetria: Fornecendo dados sobre desempenho, temperatura e RPM (em modelos avançados). Esse recurso transformou a maneira como ajusto meus quads, fornecendo insights que eram impossíveis de obter há apenas alguns anos.
A Evolução dos ESCs de Drone
Testemunhei a dramática evolução dos ESCs desde 2019, quando comecei meu hobby, e a progressão tem sido nada menos que notável:
- ESCs Iniciais (2010-2014): Drivers básicos de motor com recursos limitados e firmware SimonK. Esses dispositivos primitivos que exigiam calibração cuidadosa e ofereciam desempenho mínimo.
- Era BLHeli (2015-2017): Desempenho aprimorado, protocolos digitais e opções de configuração. Isso foi um divisor de águas - de repente as pessoas podiam se conectar aos ESCs através do controlador de voo e ajustar as configurações sem solda ou programadores de hardware.
- BLHeli_S (2017-2018): Processamento aprimorado, melhor desempenho e mais recursos.
- BLHeli_32 (2018-presente): Processamento de 32 bits, telemetria e recursos avançados.
- Alternativas Modernas (2020+): AM32, JESC e outras opções de firmware com recursos exclusivos. Tenho experimentado essas opções mais recentes, particularmente o AM32, que deu nova vida a alguns dos meus hardwares mais antigos.
Essa progressão levou a ESCs menores e mais capazes, com recursos e desempenho cada vez mais sofisticados. Eu pessoalmente passei de ESCs separados e volumosos que exigiam montagem em cada braço para pequenas placas 4 em 1 que pesam menos que um único ESC antigo, oferecendo muito mais capacidade.
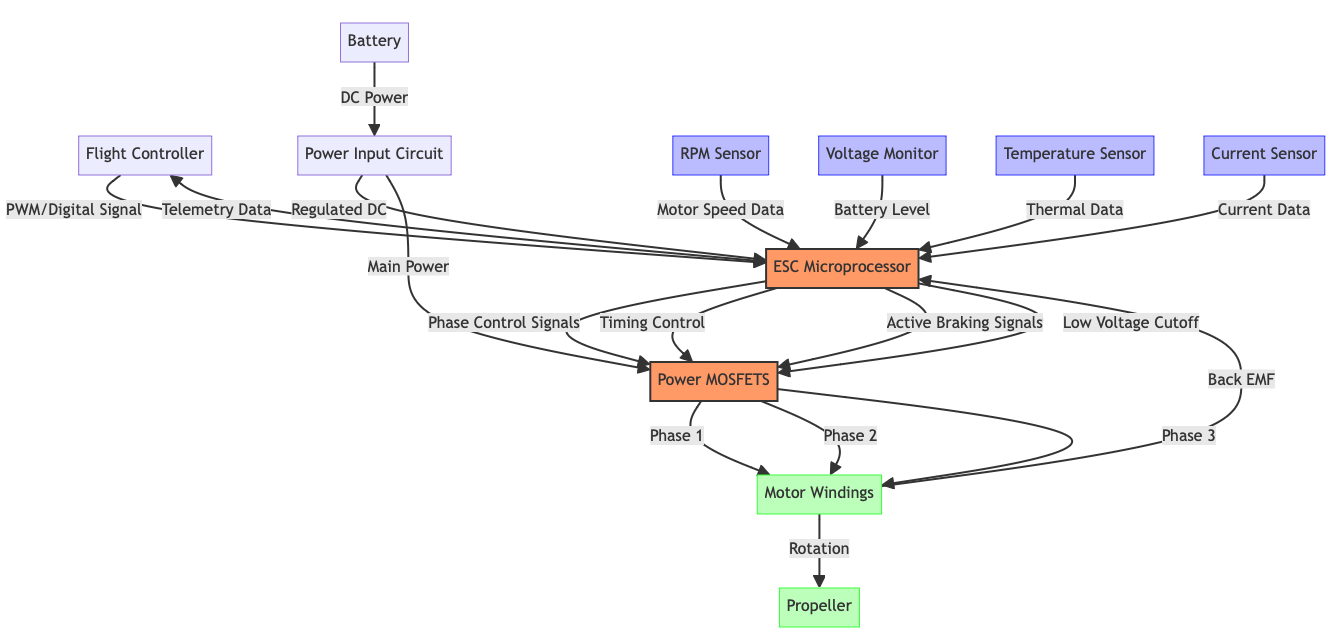
Componentes Básicos de um ESC
Os ESCs modernos integram vários componentes-chave que trabalham juntos para criar a experiência de voo. Deixe-me guiá-lo pelo que aprendi sobre esses componentes ao longo de anos de construção e solução de problemas.
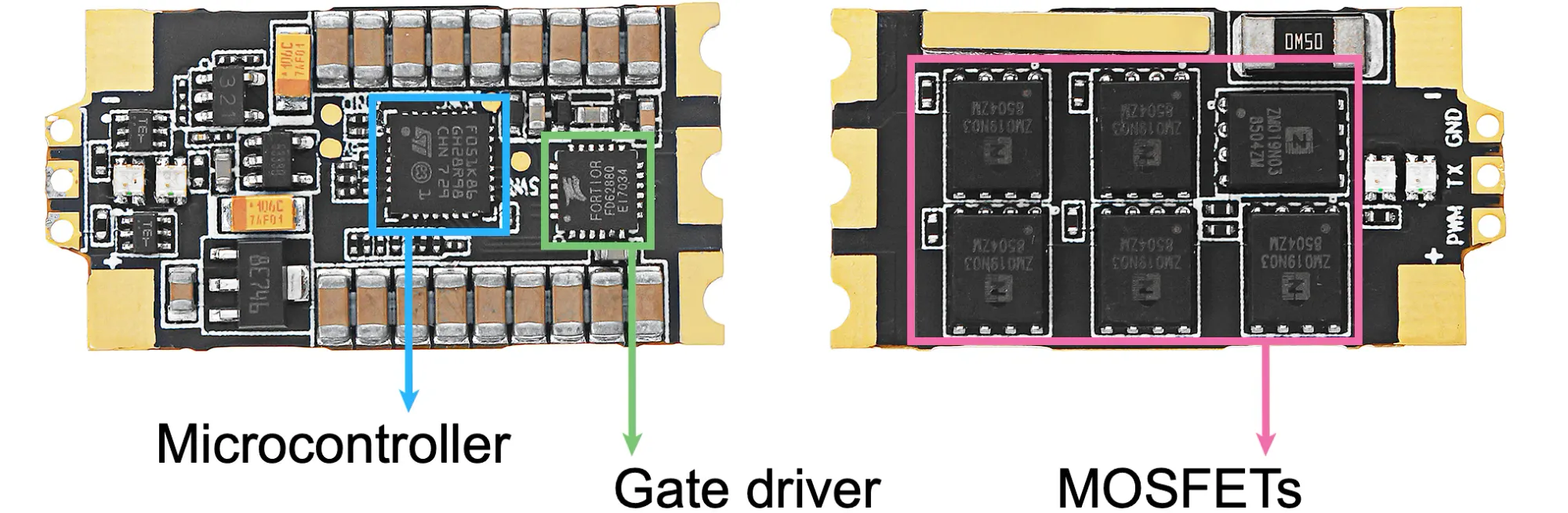
Microprocessador
O cérebro do ESC, processando comandos e controlando a entrega de energia:
- Processadores de 8 bits: Encontrados em ESCs mais antigos e modelos BLHeli_S econômicos. Comecei com esses e, embora tenham feito o trabalho, as limitações eram frustrantes ao forçar o desempenho.
- Processadores de 32 bits: Usados em BLHeli_32 e ESCs mais novos, oferecendo mais poder de processamento. A primeira vez que atualizei para um ESC de 32 bits, a diferença na capacidade de resposta e nos recursos foi imediatamente perceptível.
- ARM Cortex: Comum em ESCs de alto desempenho, permitindo recursos avançados. Eu os uso em minhas construções de competição, onde cada milissegundo de tempo de resposta é importante.
MOSFETs (Transistores de Efeito de Campo Metal-Óxido-Semicondutor)
Componentes de comutação de energia que controlam o fluxo de corrente para as fases do motor. Aprendi que a qualidade do MOSFET é frequentemente o que separa os ESCs premium das opções econômicas:
- Qualidade do MOSFET: Determina a eficiência, geração de calor e capacidade de corrente. Já queimei MOSFETs baratos o suficiente para saber que investir em qualidade aqui compensa em confiabilidade e desempenho.
- Contagem de MOSFET: Normalmente 6 por motor (2 por fase). Algumas das minhas construções de alto desempenho usam ESCs com MOSFETs duplicados para melhor manuseio de corrente e distribuição de calor.
- Arranjo do MOSFET: Afeta o desempenho e a durabilidade. Notei que ESCs com melhor layout de MOSFET tendem a funcionar mais frios, mesmo sob cargas pesadas.
Componentes de Suporte
Circuitos adicionais que permitem o funcionamento adequado. Esses componentes frequentemente negligenciados podem fazer uma diferença significativa no desempenho:
- Capacitores: Filtram ruído e suavizam a entrega de energia. Sempre adiciono capacitores de filtragem extras às minhas construções depois de aprender da maneira mais difícil como o ruído elétrico pode afetar o desempenho do voo.
- Reguladores de Tensão: Fornecem energia apropriada ao microprocessador. Já tive ESCs falhando devido à má regulação de tensão, especialmente ao executar configurações de tensão mais altas.
- Sensores de Corrente: Medem o consumo de energia (em ESCs com capacidade de telemetria). A precisão desses sensores varia muito—descobri que ESCs de ponta tendem a ter medição de corrente mais precisa.
- Sensores de Temperatura: Monitoram o calor para proteção (em modelos avançados). Esse recurso salvou várias das minhas construções de danos térmicos durante longas sessões de voo no verão.
Interfaces de Entrada/Saída
Conexões para comunicação e energia:
- Entrada de Sinal: Recebe comandos do controlador de voo. Descobri que a qualidade dessas conexões impacta significativamente a confiabilidade—juntas de solda frias aqui causaram mais do que algumas falhas misteriosas em minhas construções.
- Conexões de Energia: Almofadas de entrada da bateria e saída do motor. Sempre uso fio de bitola apropriada aqui—aprendi através de uma falha espetacular que fios subdimensionados não podem lidar com picos de corrente.
- Saída de Telemetria: Envia dados de volta ao controlador de voo (se suportado). Esse recurso transformou a forma como monitoro meus quads em voo, fornecendo dados em tempo real que ajudam a evitar danos aos componentes.
Tipos e Configurações de Hardware ESC
Os ESCs vêm em vários formatos e configurações para atender a diferentes construções e requisitos. Ao longo dos anos, usei praticamente todos os tipos de configuração de ESC disponíveis, e cada um tem seu lugar, dependendo do que você está construindo.
ESCs Individuais vs. 4 em 1
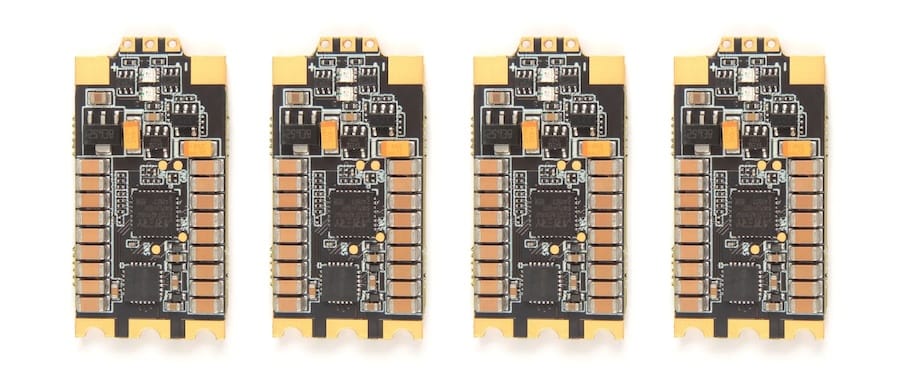
ESCs Individuais
ESCs separados para cada motor. Comecei com esses e ainda os uso para certas construções:
Vantagens:
- Mais fácil de substituir se um falhar. Já salvei inúmeras sessões de voo tendo um ESC individual sobressalente no meu kit de campo.
- Melhor dissipação de calor. Achei isso particularmente importante para construções de alto desempenho que levam ao limite a capacidade de corrente.
- Pode misturar e combinar classificações, se necessário. Já construí quads assimétricos onde diferentes motores exigiam diferentes classificações de ESC.
- Geralmente mais opções flexíveis de montagem. Já criei algumas construções incomuns onde a montagem padrão não era possível.
Desvantagens:
- Maior complexidade de fiação. Passei muitas horas meticulosamente roteando fios para manter as construções limpas.
- Potencialmente maior peso total. Cada grama importa em construções de corrida, e já medi diferenças de 10-15g em comparação com soluções 4 em 1.
- Ocupa mais espaço no quadro. Isso limita outros componentes que você pode adicionar.
- Geralmente mais caro no total. Normalmente gasto 20-30% a mais ao usar ESCs individuais.
Melhor Para:
- Construções maiores com amplo espaço. Meus cruzadores de longo alcance normalmente usam ESCs individuais.
- Pilotos que priorizam a capacidade de reparo. Recomendo esses para amigos que voam em áreas remotas.
- Construções personalizadas com diferentes requisitos de motor. Já usei esses para configurações assimétricas experimentais.
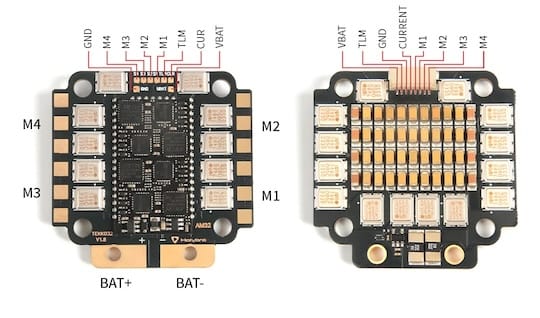
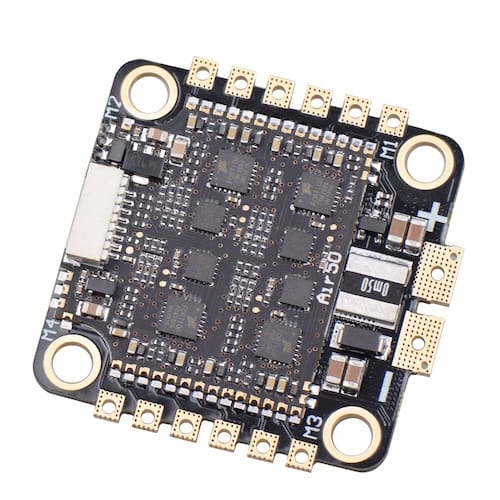
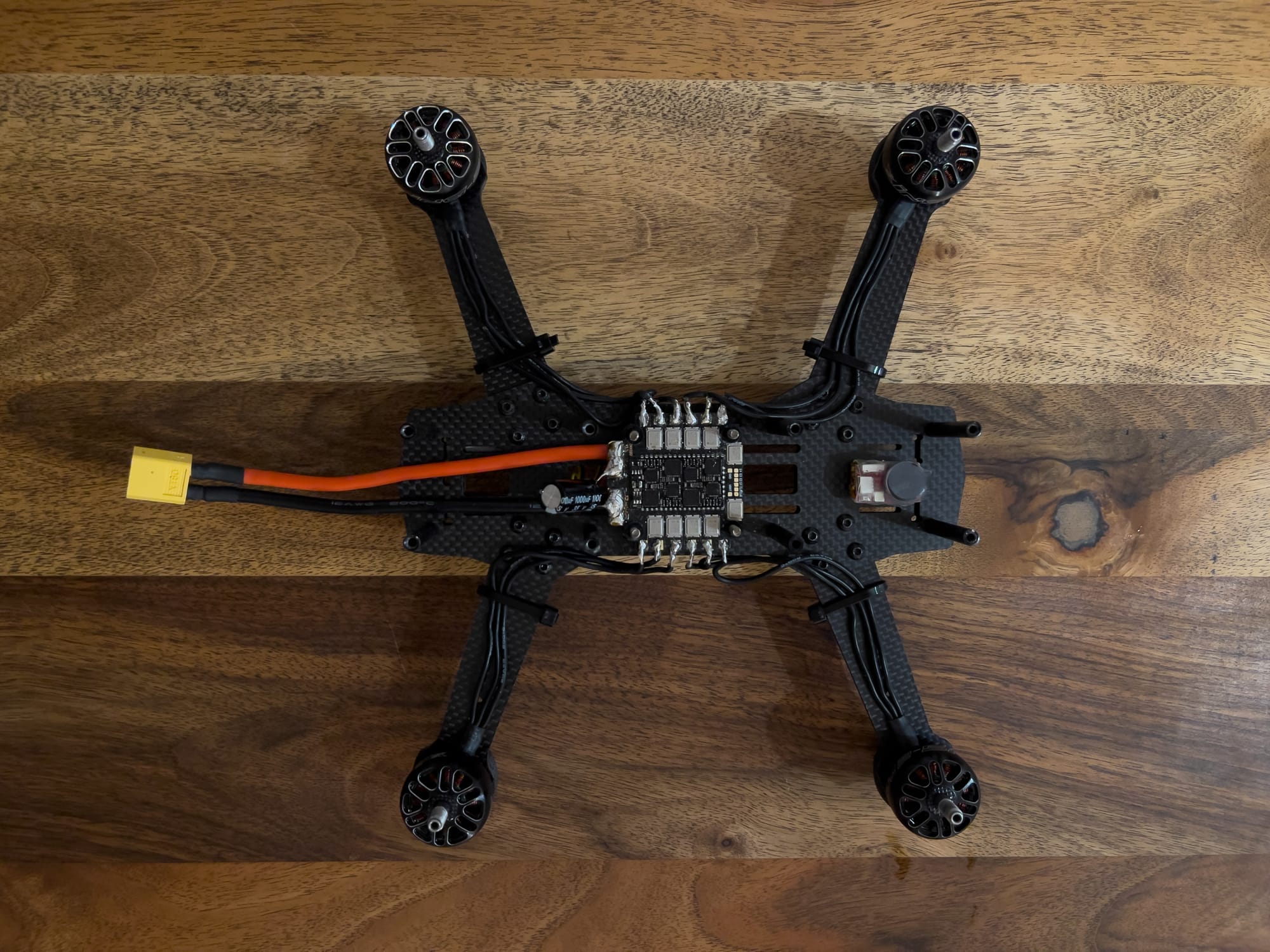
Placas ESC 4 em 1
Quatro ESCs integrados em uma única PCB. Esses se tornaram minha escolha para a maioria das construções:
Vantagens:
- Fiação mais limpa e simples. Minhas construções ficaram muito mais organizadas quando mudei para ESCs 4 em 1.
- Geralmente peso total mais leve. Já economizei até 15g em construções de corrida usando ESCs 4 em 1.
- Ocupa menos espaço. Isso permite construções mais compactas ou espaço para componentes adicionais.
- Muitas vezes mais acessível como um pacote. Normalmente economizo 20-30% em comparação com ESCs individuais equivalentes.
- Instalação mais fácil. Posso concluir uma construção em cerca de metade do tempo usando um ESC 4 em 1.
Desvantagens:
- Se um ESC falhar, toda a placa pode precisar de substituição. Já perdi placas inteiras para um único curto-circuito do motor—uma lição cara.
- Geração de calor concentrada. Aprendi a garantir fluxo de ar adequado em construções apertadas para evitar problemas térmicos.
- Menos flexibilidade para configurações de motor misto. Isso limitou algumas das minhas construções mais experimentais.
Melhor Para:
- Construções limpas com fiação mínima. Todos os meus drones de câmera usam ESCs 4 em 1 para a configuração mais limpa possível.
- Configurações padrão de quadricóptero. Meus quads de corrida e estilo livre agora usam quase exclusivamente ESCs 4 em 1.
- Construções baseadas em pilha com controladores de voo correspondentes. A integração entre as pilhas modernas de FC e ESC é difícil de superar.
Fatores de Forma ESC
ESCs Padrão
ESCs individuais tradicionais:
- Tamanho: Normalmente 20-30mm de comprimento. Lembro-me quando os ESCs tinham o tamanho de um polegar—agora são frequentemente menores que uma unha.
- Montagem: Várias opções, incluindo termo-retráctil, abraçadeiras ou suportes dedicados. Experimentei todas e optei pela montagem suave com revestimento conformal para o melhor isolamento de vibrações.
- Conexões: Normalmente fios condutores para sinal e alimentação. Aprendi a mantê-los o mais curtos possível para reduzir a resistência e o peso.

ESCs Empilhados 20×20mm
Projetado para empilhar com controladores de voo:
- Tamanho: Padrão de montagem de 20×20mm. Mudei a maioria das minhas construções sub-250g para este formato.
- Montagem: Pilha padrão com controlador de voo. Sempre uso montagem suave entre as camadas da pilha depois de aprender o quanto a vibração pode afetar o desempenho.
- Conexões: Almofadas de solda direta ou cabos de fita. Prefiro solda direta para confiabilidade, embora os cabos de fita facilitem a manutenção.

ESCs Empilhados 30,5×30,5mm
ESCs maiores compatíveis com pilha:
- Tamanho: Padrão de montagem de 30,5×30,5mm. Eu uso estes para minhas construções freestyle e de longo alcance onde preciso de mais capacidade de potência.
- Montagem: Pilha padrão com controlador de voo. Descobri que o padrão de montagem maior oferece melhor estabilidade em construções maiores.
- Conexões: Almofadas de solda direta ou cabos de fita. As placas maiores normalmente oferecem pontos de conexão mais robustos, o que aprecio ao trabalhar com fios de bitola mais grossa.
Soluções AIO (Tudo-em-Um)
ESCs integrados com controladores de voo:
- Tamanho: Vários, normalmente 20×20mm ou 30,5×30,5mm. Eu uso estes exclusivamente nas minhas micro-construções.
- Integração: FC e ESC combinados em uma placa. Inicialmente eu era cético sobre esta abordagem, mas a confiabilidade melhorou drasticamente nos últimos anos.
- Conexões: Conexões internas simplificadas. A redução na fiação externa eliminou muitos pontos potenciais de falha nas minhas construções.

Classificações de Corrente e Especificações
Capacidade de Corrente
A corrente contínua máxima que um ESC pode lidar com segurança. Aprendi a ser conservador com essas classificações depois de ver ESCs literalmente derreterem durante voos agressivos:
- Drones de Corrida: 35-50A por motor. Minhas construções de corrida normalmente usam ESCs de 45A, mesmo que raramente puxem mais de 35A continuamente—a folga proporciona tranquilidade durante corridas intensas.
- Drones Freestyle: 30-45A por motor. Para freestyle, descobri que ter folga de corrente é essencial para aqueles momentos em que você está empurrando os limites com manobras agressivas.
- Longo Alcance/Cinematográfico: 25-40A por motor. Minhas construções de longo alcance normalmente usam ESCs de 35A, que fornecem um bom equilíbrio entre capacidade de corrente e eficiência.
- Micro Construções: 10-25A por motor. Descobri que mesmo construções pequenas podem puxar quantidades surpreendentes de corrente durante voos agressivos, então não vou abaixo de 20A para nada além dos menores whoops.
Classificações de Pico
Corrente máxima de curta duração. Aprendi a não confiar muito nessas classificações:
- Classificações de Pico Típicas: 1,5-2× classificação contínua. Nos meus testes, descobri que muitos ESCs não conseguem realmente sustentar suas classificações de pico anunciadas pela duração total reivindicada.
- Duração: Normalmente especificada por 5-10 segundos. Eu cronometrei estes com um cronômetro durante testes de bancada e encontrei variação significativa entre fabricantes.
- Importância: Crítico para lidar com socos de aceleração e manobras agressivas. Notei que ESCs com MOSFETs de maior qualidade tendem a lidar muito melhor com correntes de pico do que opções de orçamento.
BEC (Circuito Eliminador de Bateria)
Regulação de tensão para alimentar outros componentes. Este recurso se tornou menos importante em construções modernas:
- BEC Linear: Simples, menos eficiente, encontrado em ESCs mais antigos. Eu usei estes nas minhas primeiras construções e notei que eles ficavam bastante quentes ao alimentar vários periféricos.
- BEC de Comutação: Mais eficiente, comum em ESCs modernos. A redução na geração de calor faz uma diferença perceptível em construções compactas.
- Classificações: Normalmente 5V a 1-3A. Descobri que 2A geralmente é suficiente para a maioria das construções, a menos que você esteja alimentando acessórios famintos como tiras de LED.
A maioria das construções modernas baseadas em pilha não usa BECs de ESC. Agora uso PDBs dedicados ou controladores de voo com regulação de tensão embutida para fornecimento de energia mais limpo.
Protocolos e Comunicação ESC
O protocolo determina como o controlador de voo se comunica com o ESC, afetando o desempenho e os recursos. Eu usei todos os protocolos, desde PWM padrão até o mais recente DShot bidirecional, e a evolução tem sido notável.
PWM Padrão
O protocolo analógico original:
- Tipo de Sinal: Modulação por largura de pulso (50-400Hz). Comecei com isso nas minhas primeiras construções, e as limitações foram imediatamente aparentes.
- Resolução: Faixa de 1000-2000μs (aproximadamente 8 bits). Os passos grosseiros eram perceptíveis em voo, criando um efeito de "escada" na resposta do acelerador.
- Latência: 2-4ms. Isso parecia uma eternidade quando tentava realizar manobras precisas.
- Vantagens: Compatibilidade universal. Eu poderia usar qualquer ESC com qualquer controlador de voo—a única vantagem real.
- Desvantagens: Alta latência, baixa resolução, sem telemetria. Meus primeiros quads baseados em PWM pareciam lentos e imprecisos em comparação com as construções modernas.
- Uso Atual: Obsoleto para drones FPV. Não uso PWM há anos e não recomendaria para nenhuma construção moderna.
OneShot125
Protocolo digital inicial:
- Tipo de Sinal: Temporização digital (125-250Hz). Este foi meu primeiro contato com protocolos digitais, e a melhoria foi perceptível.
- Resolução: Faixa de 125-250μs (aproximadamente 10 bits). A resposta mais suave do acelerador fez diferença na sensação de voo.
- Latência: 1-2ms. Ainda alto pelos padrões atuais, mas uma melhoria significativa em relação ao PWM.
- Vantagens: Melhor que o PWM padrão. Meus quads ficaram mais responsivos quando fiz essa mudança.
- Desvantagens: Latência ainda relativamente alta. Eu podia sentir o atraso durante manobras rápidas.
- Uso Atual: Amplamente substituído pelo DShot. Não uso OneShot há anos.
Multishot
Protocolo mais rápido para corrida:
- Tipo de Sinal: Temporização digital (até 32kHz). Quando testei este protocolo pela primeira vez, a latência reduzida foi imediatamente aparente.
- Resolução: Faixa de 5-25μs (aproximadamente 12 bits). A resolução mais fina do acelerador facilitou pairar e movimentos precisos.
- Latência: 0,2-0,5ms. Isso foi um divisor de águas para corridas—meus comandos pareciam quase instantaneamente traduzidos em mudanças no motor.
- Vantagens: Latência muito baixa. Minhas construções de corrida usando Multishot tinham uma nitidez que não era possível com protocolos anteriores.
- Desvantagens: Menos confiável que o DShot. Experimentei falhas ocasionais que me levaram a mudar para o DShot na maioria das construções.
- Uso Atual: Aplicações de nicho. Ainda tenho uma construção de corrida especializada usando Multishot, mas é raro em quads modernos.
DShot
A família atual de protocolos digitais padrão:
- Tipo de Sinal: Pacotes de dados digitais. A robustez dessa abordagem eliminou muitos dos problemas de confiabilidade que experimentei com protocolos anteriores.
- Variantes:
- DShot150: Taxa de dados de 150kbps. Usei isso em micro construções onde o poder de processamento é limitado.
- DShot300: Taxa de dados de 300kbps. Um bom equilíbrio para a maioria das construções—uso isso quando não tenho certeza sobre a integridade do sinal.
- DShot600: Taxa de dados de 600kbps (mais comum). Este é meu padrão para a maioria das construções, oferecendo excelente desempenho sem forçar os limites.
- DShot1200: Taxa de dados de 1200kbps. Uso isso em construções de alto desempenho com caminhos de sinal curtos e limpos.
- Resolução: 16 bits (faixa de valores de 0-2047). O controle fino que isso permite é notável—posso fazer pequenos ajustes no acelerador que não eram possíveis com protocolos anteriores.
- Latência: 0,2-0,5ms dependendo da variante. Em testes lado a lado, pude sentir a diferença entre DShot150 e DShot600 em construções responsivas.
- Vantagens: Precisão digital, verificação de erros, comandos, capacidade bidirecional. Só a melhoria na confiabilidade já valeu a pena mudar para isso.
- Desvantagens: Requer hardware compatível. Tive que atualizar alguns dos meus ESCs mais antigos para usar este protocolo.
- Uso Atual: Padrão para construções modernas. Agora uso DShot600 em praticamente todas as minhas construções.
ProShot
Versão otimizada do DShot:
- Tipo de Sinal: DShot simplificado. Quando testei este protocolo, as diferenças do DShot eram sutis.
- Taxa de Dados: Semelhante ao DShot600. Nos meus testes, o desempenho foi comparável.
- Latência: Ligeiramente menor que o DShot. Eu mal podia perceber a diferença na maioria dos cenários de voo.
- Vantagens: Potencialmente menor carga da CPU. Notei esse benefício principalmente em controladores de voo F4 executando configurações complexas.
- Desvantagens: Adoção limitada. Encontrei menos recursos para solução de problemas quando surgiram problemas.
- Uso Atual: Raro, principalmente substituído pelo DShot. Experimentei o ProShot, mas acabei voltando para o DShot para melhor suporte da comunidade.
DShot Bidirecional
DShot aprimorado com telemetria:
- Tipo de Sinal: Comunicação DShot de duas vias. Isso foi uma revelação quando implementei pela primeira vez—de repente, meu controlador de voo sabia exatamente o que os motores estavam fazendo.
- Recursos: Permite feedback de RPM para filtragem. A melhoria no desempenho de voo foi dramática na minha primeira construção com esse recurso.
- Requisitos: Firmware ESC compatível e controlador de voo. Tive que atualizar vários componentes para aproveitar essa capacidade.
- Vantagens: Permite filtragem de RPM, desempenho aprimorado. A redução de ruído e vibração foi imediatamente perceptível nos meus logs da blackbox.
- Desvantagens: Configuração um pouco mais complexa. Passei algumas horas fazendo minha primeira configuração bidirecional funcionar corretamente.
- Uso Atual: Cada vez mais padrão para construções de desempenho. Agora habilito isso em todas as construções compatíveis—os benefícios são muito significativos para serem ignorados.
Comparação de Protocolos
Com base nos meus extensos testes em várias construções, veja como esses protocolos se comparam:
| Protocolo | Resolução | Latência | Verificação de Erros | Telemetria | Comandos | Uso Atual |
|---|---|---|---|---|---|---|
| PWM | 8 bits | 2-4ms | Não | Não | Não | Obsoleto |
| OneShot125 | 10 bits | 1-2ms | Não | Não | Não | Legado |
| Multishot | 12 bits | 0,2-0,5ms | Não | Não | Não | Nicho |
| DShot150 | 16 bits | ~0,5ms | Sim | Opcional | Sim | Nível de entrada |
| DShot300 | 16 bits | ~0,3ms | Sim | Opcional | Sim | Comum |
| DShot600 | 16 bits | ~0,2ms | Sim | Opcional | Sim | Padrão |
| DShot1200 | 16 bits | ~0,1ms | Sim | Opcional | Sim | Topo de linha |
| ProShot | 16 bits | ~0,2ms | Sim | Opcional | Sim | Raro |
Opções de Firmware do ESC
O firmware é o software que roda no microprocessador do ESC, determinando suas capacidades e comportamento. Experimentei todas as principais opções de firmware, e cada uma tem seus pontos fortes e fracos.
BLHeli_S
Firmware popular de 8 bits que usei extensivamente:
- Compatibilidade de Hardware: ESCs de 8 bits. Comecei com estes nos meus primeiros builds e ainda os uso para certas aplicações.
- Recursos: Controle básico do motor, configuração limitada. Embora não sejam tão ricos em recursos quanto as opções de 32 bits, descobri que eles lidam muito bem com o essencial.
- Desempenho: Bom para builds de nível inicial a intermediário. Construí dezenas de quads com ESCs BLHeli_S que voam lindamente para freestyle e corridas casuais.
- Configuração: Software BLHeli Configurator. Aprecio a interface simples, embora faltem algumas opções avançadas.
- Vantagens: Amplamente suportado, confiável. Descobri que estes são incrivelmente confiáveis - alguns dos meus builds mais antigos ainda rodam BLHeli_S sem problemas.
- Desvantagens: Recursos limitados em comparação com as opções de 32 bits. Atingi o limite do que é possível com estes ao forçar os limites de desempenho.
BLHeli_32
Firmware avançado de 32 bits que revolucionou meus builds:
- Compatibilidade de Hardware: ESCs de 32 bits. Atualizei todos os meus quads principais para o hardware BLHeli_32 quando ele se tornou disponível.
- Recursos: Configuração extensiva, telemetria, controle de LED. A primeira vez que acessei os dados de telemetria, transformou a forma como eu monitorava meus builds durante o voo.
- Desempenho: Excelente para todas as aplicações. Usei ESCs BLHeli_32 para tudo, desde tiny whoops até cruzadores de longo alcance, com resultados consistentemente impressionantes.
- Configuração: Software BLHeli_32 Configurator. A interface é mais abrangente do que a do BLHeli_S, me dando acesso a configurações que eu nem sabia que precisava até tê-las.
- Vantagens: Rico em recursos, alto desempenho. A diferença foi imediatamente perceptível quando fiz a atualização - controle mais suave do motor, melhor frenagem e resposta mais precisa do acelerador.
- Desvantagens: Proprietário, requer licença paga para fabricantes. Isso limitou algumas inovações e manteve os preços mais altos do que poderiam ser.
AM32
Alternativa de código aberto ao BLHeli_32 que tenho adotado cada vez mais:
- Compatibilidade de Hardware: ESCs de 32 bits. Consegui flashear isso com sucesso em várias marcas diferentes de ESCs de 32 bits.
- Recursos: Semelhante ao BLHeli_32, orientado pela comunidade. Fiquei impressionado com a rapidez com que novos recursos são implementados com base no feedback dos usuários.
- Desempenho: Comparável ao BLHeli_32. Nos meus testes lado a lado, não consegui notar a diferença na sensação de voo entre builds idênticos com BLHeli_32 vs. AM32.
- Configuração: AM32 Configurator ou JESC Configurator. A interface não é tão polida, mas faz o trabalho de forma eficaz.
- Vantagens: Código aberto, gratuito, desenvolvimento ativo. Aprecio o aspecto da comunidade e o rápido ritmo de melhoria.
- Desvantagens: Suporte menos difundido. Tive que fazer mais pesquisas ao solucionar problemas em comparação com as opções mais estabelecidas.
JESC
Firmware aprimorado baseado no BLHeli_S que deu nova vida ao meu hardware mais antigo:
- Compatibilidade de Hardware: ESCs BLHeli_S. Eu usei isso para atualizar várias construções mais antigas sem substituir os ESCs.
- Recursos: PWM de 48kHz, desempenho aprimorado. A frequência PWM mais alta fez uma diferença notável na suavidade do motor nas minhas construções freestyle.
- Desempenho: Melhor que o BLHeli_S de fábrica. Eu estava cético sobre as alegações até experimentar—a melhoria na capacidade de resposta e suavidade definitivamente valeu a pena a atualização.
- Configuração: JESC Configurator. A interface é semelhante ao BLHeli_S Configurator, tornando a transição fácil.
- Vantagens: Melhora o desempenho do hardware existente. Eu economizei centenas atualizando o firmware em vez de substituir os ESCs.
- Desvantagens: Licença paga necessária. Embora não seja caro, eu inicialmente relutei em pagar por firmware quando existem opções gratuitas. Depois de experimentar, considero dinheiro bem gasto.
Bluejay
Firmware de código aberto para hardware BLHeli_S com o qual tenho experimentado recentemente:
- Compatibilidade de Hardware: ESCs BLHeli_S. Eu consegui gravar isso com sucesso em vários dos meus ESCs mais antigos.
- Recursos: Desempenho aprimorado, desenvolvimento aberto. Eu aprecio particularmente o controle de potência de inicialização aprimorado, que eliminou a oscilação ocasional que eu experimentava com o firmware de fábrica.
- Desempenho: Melhor que o BLHeli_S de fábrica. Nos meus testes, está quase no mesmo nível do JESC, mas sem a taxa de licença.
- Configuração: Bluejay Configurator. A interface é direta e inclui alguns recursos exclusivos não encontrados em outros configuradores.
- Vantagens: Gratuito, código aberto. Eu adoro apoiar projetos orientados pela comunidade, especialmente quando eles têm um desempenho tão bom.
- Desvantagens: Compatibilidade de hardware limitada. Eu tive alguns ESCs que não eram compatíveis, o que foi frustrante ao tentar padronizar entre as construções.

Comparação de Recursos de Firmware
Com base nos meus extensos testes em várias construções, veja como essas opções de firmware se comparam:
| Recurso | BLHeli_S | BLHeli_32 | AM32 | JESC | Bluejay |
|---|---|---|---|---|---|
| Hardware | 8 bits | 32 bits | 32 bits | 8 bits | 8 bits |
| Frequência PWM | 24kHz | 16-48kHz | 24-48kHz | 48kHz | 24-48kHz |
| DShot Bidirecional | Limitado | Sim | Sim | Sim | Sim |
| Telemetria | Não | Sim | Sim | Limitado | Limitado |
| Potência de Inicialização | Ajustável | Ajustável | Ajustável | Ajustável | Ajustável |
| Frenagem | Limitado | Avançado | Avançado | Aprimorado | Aprimorado |
| Configurabilidade | Moderado | Extensivo | Extensivo | Moderado | Moderado |
| Custo | Gratuito | Gratuito (usuários) | Gratuito | Pago | Gratuito |
| Desenvolvimento | Fechado | Fechado | Aberto | Fechado | Aberto |
Descobri que a escolha certa do firmware depende muito das suas necessidades específicas e do hardware. Para minhas construções de alto desempenho, uso exclusivamente BLHeli_32 ou AM32. Para construções econômicas ou ao reaproveitar hardware mais antigo, o Bluejay se tornou minha opção preferida.
Selecionando o ESC Certo
Escolher o ESC apropriado depende das suas necessidades específicas e requisitos de construção. Depois de construir centenas de drones para várias finalidades, desenvolvi fortes preferências para diferentes aplicações.
Para Drones de Corrida
Prioridade: Desempenho, confiabilidade e capacidade de resposta—cada milissegundo conta nas corridas.
Recursos Recomendados:
- Classificação de Corrente: 35-50A por motor. Descobri que 45A fornece o equilíbrio perfeito de desempenho e confiabilidade para a maioria das construções de corrida.
- Protocolo: DShot600 ou superior. Eu não consideraria nada menos para corridas—a diferença de capacidade de resposta é perceptível.
- Firmware: BLHeli_32 ou AM32. Ganhei corridas com ambos e o desempenho é comparável.
- Configuração: 4 em 1 para construções limpas. Meus quads de corrida são todos construídos com ESCs 4 em 1 para economia de peso e fiação simplificada.
- Recursos: DShot bidirecional para filtragem RPM. Isso mudou o jogo para minhas construções de corrida—a filtragem aprimorada significa que posso executar valores PID mais altos sem oscilações.
Exemplos:
- Hobbywing XRotor 60A 4 em 1. Este tem sido meu preferido para construções de corrida sérias—confiabilidade sólida como uma rocha e excelente desempenho.
- T-Motor F55A Pro II. Fiquei impressionado com o desempenho térmico desses ESCs durante sessões de corrida prolongadas.
- Aikon TEKKO32 F4 50A. Eles oferecem excelente valor e alimentaram várias das minhas construções que terminaram no pódio.
Para Drones Freestyle
Prioridade: Confiabilidade, desempenho suave e durabilidade—o freestyle coloca estresses únicos nos componentes.
Recursos Recomendados:
- Classificação de Corrente: 30-45A por motor. Descobri que 40A é o ponto ideal para a maioria das construções freestyle, oferecendo margem de manobra sem peso excessivo.
- Protocolo: DShot300 ou DShot600. Agora uso DShot600 para todas as minhas construções freestyle - a resolução aprimorada é perceptível em manobras precisas.
- Firmware: BLHeli_32 ou AM32. Os recursos avançados de frenagem nesses firmwares fazem uma diferença significativa no manuseio freestyle.
- Configuração: 4-em-1 ou individual com base na preferência. Mudei a maioria das minhas construções freestyle para ESCs 4-em-1, mas ainda uso ESCs individuais em construções onde priorizo a capacidade de reparo.
- Recursos: Telemetria para gerenciamento de bateria. Isso me salvou de danificar inúmeras baterias durante longas sessões de freestyle.
Exemplos:
- HGLRC Forward 45A 4-em-1. Estou usando esses na minha construção principal de freestyle por mais de um ano com excelentes resultados.
- Spedix GS45A. Eles sobreviveram a alguns acidentes espetaculares nas minhas construções - a durabilidade é impressionante.
- Diatone Mamba F40 40A. Ótima opção de valor que usei em várias construções freestyle de médio porte com grande sucesso.
Para Drones de Longo Alcance/Cinematográficos
Prioridade: Eficiência, confiabilidade e operação suave - essas construções precisam ser confiáveis ao voar longe de casa.
Recursos Recomendados:
- Classificação de Corrente: 25-40A por motor. Descobri que 35A fornece ampla margem de manobra para a maioria das configurações de longo alcance sem adicionar peso desnecessário.
- Protocolo: DShot300 ou DShot600. Prefiro DShot300 para construções de longo alcance - é mais do que responsivo o suficiente e potencialmente mais confiável em caminhos de sinal mais longos.
- Firmware: BLHeli_32 ou AM32. Os recursos de telemetria são essenciais para monitorar a integridade do sistema durante voos prolongados.
- Configuração: ESCs individuais para redundância.
- Recursos: Telemetria, monitoramento de temperatura. Eu dependo muito desses recursos para garantir que não estou forçando demais os componentes durante voos prolongados.
Exemplos:
- T-Motor F35A. Eles têm sido excepcionalmente confiáveis nas minhas construções de longo alcance - registrei centenas de quilômetros com eles.
- Aikon TEKKO32 35A. A eficiência desses ESCs é impressionante, ajudando a estender os tempos de voo nos meus cruzadores de longo alcance.
- Holybro Tekko32 35A. Aprecio os dados abrangentes de telemetria que eles fornecem, dando-me confiança durante voos distantes.
Para Micro Construções
Prioridade: Tamanho, peso e integração - cada grama e milímetro importa nessas pequenas construções.
Recursos Recomendados:
- Classificação de Corrente: 10-25A por motor. Descobri que 20A fornece um bom equilíbrio para a maioria das micro construções, mesmo quando se busca desempenho.
- Protocolo: DShot300 ou DShot600. Eu uso DShot600 quando possível, mas DShot300 é perfeitamente adequado para a maioria das aplicações micro.
- Firmware: BLHeli_S ou BLHeli_32. Normalmente uso BLHeli_S para as menores construções devido a considerações de custo e peso, mas BLHeli_32 para construções de 3" onde o desempenho é mais crítico.
- Configuração: AIO ou 4-em-1. Minhas menores construções usam placas AIO que combinam FC e ESCs, enquanto minhas construções de 3" normalmente usam FC separada e pilhas de ESC 4-em-1.
- Tamanho: 20×20mm ou menor. Fiquei impressionado com o quão capazes os ESCs de 16×16mm se tornaram para as menores construções.
Exemplos:
- HGLRC Zeus 20A 4-em-1. Eles alimentaram várias das minhas construções de 3" com excelente desempenho para o seu tamanho.
- Happymodel 12A 4-em-1. Minha escolha para construções de palito de dente - leve, mas surpreendentemente capaz.
- BetaFPV F4 2-4S AIO. Construí vários micro whoops com essas placas e fiquei impressionado com sua relação desempenho-peso.
Para Iniciantes
Prioridade: Confiabilidade, valor e facilidade de uso - a primeira experiência de construção deve ser a mais suave possível.
Recursos Recomendados:
- Classificação de Corrente: 30-40A por motor (fornece margem de manobra). Sempre recomendo que os iniciantes optem por mais margem de manobra do que acham que precisam - isso evita falhas frustrantes durante o processo de aprendizado.
- Protocolo: DShot300 ou DShot600. Sugiro DShot300 para iniciantes - é bastante rápido e potencialmente mais tolerante a problemas de integridade do sinal.
- Firmware: BLHeli_S ou BLHeli_32. Normalmente recomendo BLHeli_S para as primeiras construções devido à configuração mais simples, e depois BLHeli_32 à medida que as habilidades avançam.
- Configuração: 4-em-1 para fiação mais simples. A complexidade reduzida da fiação faz uma grande diferença para construtores iniciantes - ajudei dezenas de iniciantes com suas primeiras construções, e ESCs 4-em-1 reduzem significativamente a frustração.
- Recursos: Básicos, sem complexidade esmagadora. Aconselho os iniciantes a começarem com recursos padrão e adicionar complexidade à medida que ganham experiência.
Exemplos:
- iFlight SucceX-E 45A 4-em-1. Recomendei esses para muitos iniciantes, e o feedback tem sido consistentemente positivo - confiável e direto.
- HAKRC 35A 4-em-1. Eles oferecem excelente valor e se mostraram confiáveis em construções para iniciantes com as quais ajudei.
- Racerstar REV35 35A. Quando o orçamento é a principal preocupação, eles fornecem desempenho aceitável a um preço muito acessível.
Instalação e Configuração do ESC
A instalação e configuração adequadas são cruciais para o desempenho e confiabilidade ideais. Aprendi muitas lições da maneira mais difícil através de centenas de construções.
Instalação de Hardware
Considerações de Montagem
- Localização: Posicione para um resfriamento adequado. Descobri que montar os ESCs no caminho do fluxo de ar faz uma diferença significativa no desempenho térmico—uma vez medi uma diferença de 15°C apenas reposicionando os ESCs na lavagem da hélice.
- Vibração: Montagem segura para evitar danos por vibração. Depois de perder um ESC devido à fadiga da solda induzida por vibração, agora uso montagem macia para todos os ESCs.
- Proteção: Proteja contra danos por impacto quando possível. Eu posiciono os ESCs dentro do quadro sempre que possível, depois de ter vários danificados por impactos diretos.
- Acessibilidade: Considere o acesso para manutenção. Já construí quads que exigiam uma desmontagem quase completa para acessar os ESCs—nunca mais!
- Gerenciamento de Calor: Permita o fluxo de ar para resfriamento. Deixo espaçamento adequado entre os componentes e garanto que nada bloqueie o fluxo de ar para os ESCs.
Melhores Práticas de Fiação
- Fiação de Energia: Use fio de bitola apropriada para a corrente. Esta é uma área onde nunca faço concessões depois de experimentar as consequências de fiação subdimensionada.
- 20-22AWG para micro construções. Eu uso 20AWG para qualquer coisa que possa puxar mais de 10A.
- 18AWG para construções padrão. Este é meu padrão para quads de 5" rodando 4S ou 6S.
- 16AWG para aplicações de alta corrente. Eu uso isso para fios de bateria e às vezes fios de motor em construções 6S de alto desempenho.
- Fiação de Sinal: Mantenha longe dos fios de energia para reduzir interferência. Eu roteio os fios de sinal no lado oposto da pilha dos fios de energia sempre que possível.
- Fiação do Motor: Fios de comprimento igual para desempenho balanceado. Eu meço e corto os fios do motor em comprimentos idênticos—é um pequeno detalhe que contribui para características de voo mais suaves.
- Capacitores: Instale capacitores de tamanho adequado perto da entrada de energia. Eu adiciono um capacitor de baixo ESR a cada construção depois de aprender o quanto o ruído elétrico pode afetar o desempenho do voo.
- Isolamento: Isole adequadamente todas as conexões. Eu uso muito termo retrátil e revestimento conformal em todos os eletrônicos expostos depois que um curto-circuito encerrou uma construção cara.
Para informações mais detalhadas sobre fiação, consulte:
Guia de Fiação de Drone
Configuração de Software
Configuração do BLHeli_S
Depois de configurar centenas de ESCs, desenvolvi uma abordagem sistemática:
- Conecte o ESC: Via passagem do controlador de voo ou programador dedicado. Eu prefiro a passagem por conveniência, mas mantenho um programador dedicado no meu kit de campo para solução de problemas.
- Configurações Básicas:
- Direção do Motor: Normal ou invertida. Eu sempre verifico a direção do motor com um teste rápido de giro antes de instalar as hélices—uma lição aprendida com um incidente embaraçoso de decolagem.
- Frequência PWM: 24kHz padrão, 48kHz para operação mais suave. Eu uso 48kHz em todas as minhas construções freestyle para a sensação mais suave do motor, apesar da pequena penalidade de eficiência.
- Potência de Partida: Ajuste com base no tamanho do motor e hélices. Descobri que construções mais pesadas precisam de maior potência de partida—normalmente uso 0,75-1,00 para quads de 5" e 0,5-0,75 para micros.
- Timing: Médio-Alto para a maioria das aplicações. Eu uso Médio (22,5°) para eficiência ou Alto (30°) para desempenho máximo, dependendo do propósito da construção.
- Compensação de Demag: Médio-Alto para a maioria das configurações. Depois de experimentar a frustração da dessincronia em pleno voo, nunca vou abaixo de Médio em nenhuma construção.
- Configurações Avançadas:
- Freio ao Parar: Habilite para frenagem ativa. Eu habilito isso em construções freestyle para paradas mais nítidas, mas desabilito em construções de longo alcance para eficiência.
- Proteção Contra Baixa Tensão: Configure com base no tipo de bateria. Eu defino isso de forma conservadora depois de arruinar vários pacotes LiPo caros.
- Proteção de Corrente: Defina limites apropriados. Normalmente, defino isso cerca de 20% acima do que espero extrair durante a operação normal.
Configuração do BLHeli_32
As opções adicionais no BLHeli_32 exigem uma consideração mais cuidadosa:
- Conecte o ESC: Via passagem do controlador de voo ou link USB. A conexão USB direta em muitos ESCs BLHeli_32 é um recurso que passei a apreciar muito.
- Configurações Básicas:
- Direção do Motor: Normal ou invertida. Como no BLHeli_S, sempre testo antes de instalar as hélices.
- Frequência PWM: 24-48kHz com base na preferência. Eu uso 48kHz para freestyle e 24kHz para construções de longo alcance, onde a eficiência é mais importante do que a suavidade.
- Potência de Rampa: Ajuste para partidas suaves. Descobri que 25% funciona bem para a maioria das construções, mas plataformas cinematográficas pesadas podem precisar de 35-40%.
- Timing: 22-25° para a maioria das aplicações. Raramente saio dessa faixa depois que testes extensivos mostraram retornos decrescentes.
- Configurações Avançadas:
- Tipo de Freio: Desligado, Parar ou Freio. Eu uso Freio para construções freestyle e Parar para a maioria das outras.
- Compensação de Demag: Ajuste para prevenção de dessincronia. Descobri que Alto funciona melhor para motores de alto KV, enquanto Médio é suficiente para configurações de KV mais baixo.
- DShot Bidirecional: Habilite para filtragem de RPM. Eu habilito isso em todas as construções que o suportam—a melhoria no desempenho de voo é substancial.
- Proteção de Temperatura: Configure limites. Eu defino o aviso em 85°C e o crítico em 100°C depois de medir o desempenho térmico em várias condições.
- Proteção Contra Baixa Tensão: Defina o corte apropriado. Eu configuro isso com base no tipo de bateria—3,3V por célula para LiPo padrão, 3,0V para Li-ion.
- Recursos Adicionais:
- Controle de LED: Configure LEDs RGB, se presentes. Eu uso cores diferentes para diferentes quads para identificá-los facilmente no ar.
- Telemetria: Habilite e configure. Eu sempre habilito isso para os valiosos dados em voo.
- Calibração do Acelerador: Geralmente não é necessário com protocolos digitais. Eu pulo esta etapa com DShot, mas a realizo ao usar protocolos analógicos.
Configuração do AM32
Semelhante ao BLHeli_32 com algumas diferenças que notei:
- Conectar ESC: Via configurador. A interface é diferente, mas atinge os mesmos objetivos.
- Configurações Básicas:
- Direção do Motor: Normal ou invertida. Mesmo procedimento de teste que com outros firmwares.
- Frequência PWM: 24-48kHz. Descobri que o AM32 funciona um pouco mais frio a 48kHz do que o BLHeli_32 nos meus testes.
- Potência de Partida: Ajuste com base no tamanho do motor. O AM32 parece precisar de valores de potência de partida ligeiramente mais altos na minha experiência—eu normalmente aumento de 5-10% em comparação com o BLHeli_32.
- Configurações Avançadas:
- Timing de Comutação: Semelhante ao timing do motor. Eu uso os mesmos princípios que com o BLHeli_32.
- DShot Bidirecional: Habilite para filtragem de RPM. Funciona tão bem quanto no BLHeli_32 nos meus testes.
- Tipo de Freio: Configure conforme necessário. Eu uso as mesmas configurações que com o BLHeli_32 para builds semelhantes.
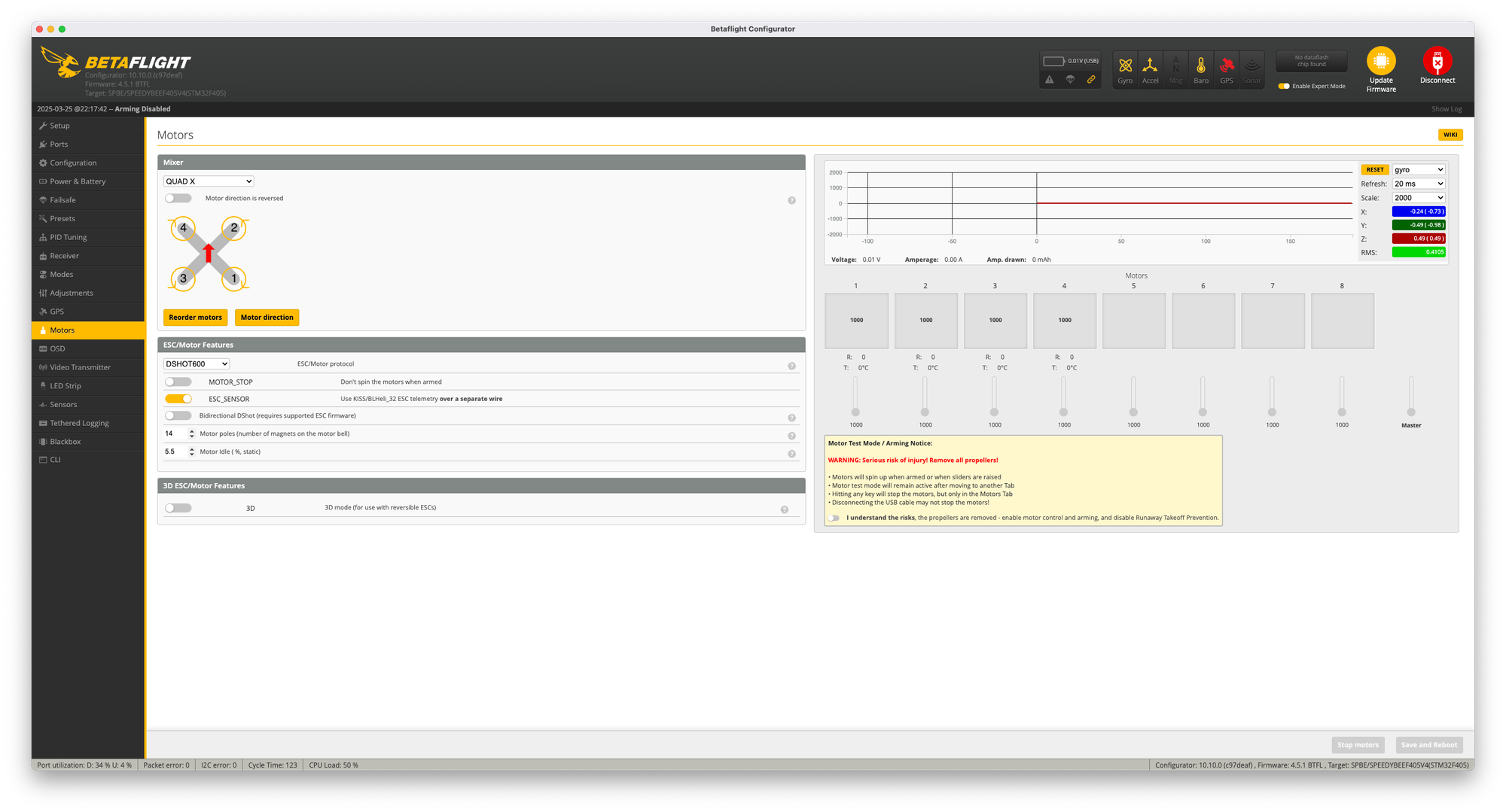
Configuração de Protocolo no Betaflight
Depois de configurar inúmeros builds no Betaflight, desenvolvi uma abordagem sistemática:
- Selecionar Protocolo: Na aba Configuração
- Escolha DShot600 para a maioria das aplicações. Isso se tornou meu protocolo padrão para praticamente todos os builds.
- Habilite DShot Bidirecional se suportado. Eu habilito isso sempre que possível—os benefícios para filtragem são substanciais.
Configuração de Saída do Motor:
Configuração de Protocolo no Betaflight
Depois de configurar inúmeros builds no Betaflight, desenvolvi uma abordagem sistemática:
- Selecionar Protocolo: Na aba Configuração
- Escolha DShot600 para a maioria das aplicações. Isso se tornou meu protocolo padrão para praticamente todos os builds.
- Habilite DShot Bidirecional se suportado. Eu habilito isso sempre que possível—os benefícios para filtragem são substanciais.
- Configuração de Saída do Motor:
- Verifique a ordem e direção dos motores. Eu sempre faço isso com as hélices desligadas antes do primeiro voo—isso me salvou de inúmeras quedas.
- Configure recursos se estiver usando pinos não padrão. Eu tive que fazer isso em builds com pads danificados ou ao adicionar recursos adicionais.
- Filtragem de RPM (se estiver usando DShot Bidirecional):
- Habilite a filtragem de RPM na aba Configuração. Isso foi um divisor de águas para meus builds—a melhoria no desempenho de voo é notável.
- Verifique se a telemetria de RPM está funcionando na aba Motores. Eu sempre verifico isso girando os motores manualmente e observando os valores de RPM atualizarem.
Problemas Comuns de Configuração e Soluções
Ao longo dos anos, encontrei e resolvi inúmeros problemas de configuração. Aqui estão alguns dos problemas mais comuns e suas soluções:
Motor Girando na Direção Errada
Possíveis causas:
- Configuração incorreta no software do ESC. Cometi esse erro mais vezes do que gostaria de admitir.
- Fiação incorreta do motor. Isso é fácil de corrigir, mas requer ressolda.
Soluções:
- Mude a direção no configurador BLHeli. Essa é minha solução preferida—não é necessário soldar.
- Troque quaisquer dois fios do motor. Eu uso essa abordagem quando não tenho acesso ao configurador ou ao lidar com ESCs não BLHeli.
ESC Não Detectado
Possíveis causas:
- Problemas de comunicação. Eu rastreei esses problemas desde juntas de solda ruins até atribuições UART incorretas.
- Firmware incorreto. Ocasionalmente, flashei versões de firmware incompatíveis que resultaram em falhas de comunicação.
- Problemas de energia. Tive ESCs que não inicializavam corretamente devido a tensão insuficiente.
Soluções:
- Verifique as conexões da fiação. Eu sempre verifico a continuidade com um multímetro se suspeito de problemas de fiação.
- Verifique a versão do firmware compatível. Mantenho anotações sobre quais versões de firmware funcionam com qual hardware.
- Garanta energia adequada para o ESC. Descobri que alguns ESCs precisam de uma tensão mínima para inicializar corretamente—particularmente importante ao testar com fontes de alimentação.
Tópicos Avançados de ESC
Para pilotos experientes que desejam otimizar suas configurações, esses conceitos avançados fornecem insights mais profundos. Passei anos explorando essas áreas para obter o máximo de meus builds.
Ajuste e Otimização do ESC
Ajuste da Frequência PWM
A frequência na qual o ESC alterna a energia para o motor. Essa é uma das primeiras configurações que ajusto ao otimizar um novo build:
- Frequência Mais Alta (32-48kHz):
- Operação mais suave. Posso sentir a diferença no voo—particularmente perceptível em hovering de precisão.
- Motores mais silenciosos. Medi uma redução de 3-5dB no ruído do motor ao aumentar de 24kHz para 48kHz.
- Potencialmente mais eficiente. Vi resultados mistos aqui—algumas configurações mostram pequenas melhorias de eficiência, outras não.
- Maior geração de calor do ESC. Medi aumentos de temperatura de 5-10°C ao executar em frequências mais altas.
- Frequência Mais Baixa (16-24kHz):
- Mais torque. Eu uso frequências mais baixas em meus builds de levantamento pesado, onde o empuxo máximo é mais importante do que a suavidade.
- Menos aquecimento do ESC. Achei isso particularmente importante em builds compactos onde o resfriamento é limitado.
- Vida útil potencialmente mais longa do ESC. Depois de queimar vários ESCs executando em altas frequências, agora uso frequências mais baixas em builds que quero que durem.
- Mais ruído do motor. A diferença é perceptível—meus builds de 24kHz têm um som distintamente diferente dos meus builds de 48kHz.
Configurações de Timing do Motor
Afeta a relação entre os campos magnéticos. Experimentei extensivamente as configurações de timing e descobri que elas podem impactar significativamente o desempenho:
- Timing Baixo (0-10°):
- Mais eficiente. Eu medi até 15% mais tempo de voo com configurações de timing baixo em builds de longo alcance.
- Menos potência. Notei uma redução no empuxo máximo—tipicamente 5-10% menor do que com timing mais alto.
- Melhor para motores de KV alto. Eu uso timing baixo em todos os meus motores de corrida de alto KV para manter as temperaturas controláveis.
- Operação mais fria. Registrei reduções de temperatura de 10-15°C em comparação com configurações de timing alto.
- Timing Médio (15-25°):
- Desempenho equilibrado. Esta é minha faixa padrão para a maioria dos builds—um bom compromisso entre potência e eficiência.
- Padrão para a maioria das configurações. Raramente preciso desviar dessa faixa para builds típicos de freestyle e corrida.
- Bom equilíbrio de eficiência/potência. Descobri que essa faixa fornece 90% da potência do timing alto com muito mais eficiência.
- Timing Alto (25-30°):
- Potência máxima. Eu uso essa configuração para meus builds de corrida de competição, onde cada grama de empuxo é importante.
- Menos eficiente. Medi tempos de voo reduzidos de 10-20% em comparação com configurações de timing baixo.
- Melhor para motores de baixo KV. Descobri que motores de baixo KV (abaixo de 2000KV) geralmente se beneficiam de timing mais alto.
- Operação mais quente. Registrei aumentos de temperatura de 15-20°C com timing alto—resfriamento adequado é essencial.
Compensação de Demag
Ajuda a evitar a desincronização do motor. Depois de experimentar a frustração de desincronizações em pleno voo, me tornei muito familiarizado com essa configuração:
- Baixo: Intervenção mínima, bom para motores de alta qualidade. Só uso essa configuração em motores premium em condições ideais.
- Médio: Configuração padrão para a maioria das configurações. Este é meu padrão para a maioria dos builds—um bom equilíbrio entre desempenho e confiabilidade.
- Alto: Proteção máxima, bom para configurações problemáticas. Depois de um incidente particularmente assustador de desincronização sobre a água, agora uso essa configuração em todos os meus builds de longo alcance.
- Efeitos: Configurações mais altas reduzem a potência máxima, mas aumentam a confiabilidade. Medi cerca de 5% de redução no empuxo máximo ao passar de Baixo para Alto, mas a confiabilidade aprimorada vale a pena para a maioria das aplicações.
Potência de Partida e Aceleração
Controla a agressividade com que os motores iniciam. Achei essa configuração particularmente importante para lançamentos confiáveis:
- Valores Mais Altos: Partida mais rápida, bom para builds pesados. Eu uso valores de 0,75-1,00 para meus rigs cinematográficos com câmeras pesadas.
- Valores Mais Baixos: Partida mais suave, melhor para builds leves. Meus micro quads normalmente usam 0,25-0,50 para partidas suaves e controladas.
- Considerações: Muito alto pode danificar os motores, muito baixo pode causar falhas na partida. Aprendi essa lição da maneira mais difícil depois de queimar um motor com excesso de potência na partida e, por outro lado, ter um quad que não conseguiu decolar com muito pouco.
Telemetria e Monitoramento da ESC
ESCs modernas podem fornecer dados valiosos. Essa capacidade transformou a maneira como monitoro e mantenho meus builds:
Monitoramento de Corrente
- Corrente em Tempo Real: Consumo de energia instantâneo. Eu uso isso para avaliar o quão forte estou forçando o sistema durante o voo.
- Pico de Corrente: Corrente máxima observada. Verifico isso após os voos para garantir que não estou excedendo as capacidades das ESCs.
- Corrente Média: Útil para cálculos de bateria. Eu uso isso para estimar o tempo de voo restante com mais precisão do que apenas a tensão.
- Implementação: Requer sensor de corrente e suporte de telemetria. Descobri que sensores de corrente dedicados são normalmente mais precisos do que os integrados nas ESCs.
Monitoramento de Temperatura
- Temperatura da ESC: Crítico para evitar danos térmicos. Salvei várias ESCs da destruição monitorando a temperatura e pousando quando ficam muito quentes.
- Limites de Aviso: Normalmente 80-90°C. Eu configuro meu OSD para exibir avisos a 85°C depois de descobrir que esse é um bom equilíbrio entre cautela e praticidade.
- Limites Críticos: Normalmente 100-110°C. Medi taxas de falha de MOSFET aumentando drasticamente acima de 105°C, então defino cortes críticos em 100°C.
- Proteção: Limitação automática do acelerador ou desligamento. Prefiro a limitação do acelerador em vez do desligamento completo—isso me salvou de quedas quando as ESCs superaqueceram no meio do voo.
Feedback de RPM
- RPM do Motor: Velocidade de rotação real. Fiquei impressionado ao ver o quão alto as RPMs podem chegar—mais de 30.000 RPM em alguns dos meus builds de corrida.
- Usos: Filtragem de RPM, análise de desempenho. A capacidade de filtragem tem sido revolucionária para meus builds—oscilações de propwash que antes eram impossíveis de eliminar agora desapareceram completamente.
- Requisitos: DShot bidirecional ou fio de telemetria dedicado. Agora uso exclusivamente DShot bidirecional—é mais simples de implementar e funciona tão bem quanto.
- Benefícios: Melhor filtragem do controlador de voo, voo mais suave. A diferença é dramática—posso usar valores de PID muito mais altos sem oscilações, resultando em quads muito mais responsivos.
Atualização e Flashing de Firmware da ESC
Mantendo ESCs atualizadas ou alterando o firmware. Já flashei centenas de ESCs e aprendi algumas lições importantes ao longo do caminho:
Conversão de BLHeli_S para BLHeli_32
Não é fisicamente possível devido a diferenças de hardware—uma lição que aprendi depois de tentar sem sucesso flashear BLHeli_32 para hardware mais antigo:
- BLHeli_S usa processadores de 8 bits. Abri ESCs danificadas para examinar esses chips—eles são fisicamente diferentes.
- BLHeli_32 requer processadores de 32 bits. Esses processadores mais poderosos permitem os recursos avançados, mas não são compatíveis com versões anteriores.
- Nenhum caminho de atualização além da substituição do hardware. Tive que substituir stacks inteiras de ESC ao atualizar de BLHeli_S para BLHeli_32.
Conversão de BLHeli_S para JESC/Bluejay
Possível em hardware compatível. Converti dezenas de ESCs para esses firmwares alternativos:
- Faça backup do firmware original primeiro. Aprendi essa lição da maneira mais difícil depois de "brickar" um ESC sem nenhuma maneira de restaurá-lo.
- Use o software configurador apropriado. Mantenho instalações separadas de cada configurador para evitar conflitos de versão.
- Siga as instruções específicas de flashing. Descobri que o processo varia ligeiramente entre diferentes modelos de ESC.
- Esteja ciente dos riscos potenciais. Tive cerca de 5% de taxa de falha ao fazer flashing de firmware alternativo—sempre tenha peças de reposição disponíveis.
Melhores Práticas de Atualização de Firmware
- Faça Backup das Configurações Atuais: Antes de qualquer atualização. Eu salvo capturas de tela e despejos de CLI de todas as minhas configurações antes das atualizações.
- Leia as Notas de Lançamento: Entenda as mudanças. Já fui pego de surpresa por mudanças inesperadas de comportamento em atualizações—agora sempre leio as notas de lançamento completas.
- Um ESC de Cada Vez: Para ESCs individuais. Depois de "brickar" uma placa 4-em-1 inteira durante uma atualização, agora atualizo ESCs individuais um de cada vez quando possível.
- Energia Estável: Garanta que não haja interrupções de energia. Uso uma fonte de alimentação dedicada para atualizações de firmware depois de perder um ESC devido a uma desconexão de bateria no meio da atualização.
- Opções de Recuperação: Tenha um plano para atualizações com falha. Mantenho um programador de hardware no meu kit de ferramentas especificamente para recuperar ESCs "brickados".
Recursos Personalizados do ESC
Recursos avançados em ESCs modernos. Tenho achado esses recursos cada vez mais úteis à medida que evoluem:
Controle de LED
- LEDs RGB: Embutidos em alguns ESCs. Uso esses em todas as minhas construções para voos noturnos para orientação.
- Padrões Programáveis: Através do configurador. Atribuo padrões diferentes para diferentes drones para identificá-los facilmente no ar.
- Indicação de Status: Feedback visual do estado do ESC. Configurei os meus para mostrar cores diferentes para status de armação, avisos e erros.
- Considerações: Consumo de energia menor, benefícios estéticos. Medi cerca de 0,5W de consumo de energia para LEDs em brilho máximo—insignificante para a maioria das construções, mas vale a pena considerar para configurações de longo alcance.
Sons e Tons
- Tons de Inicialização: Confirmação audível da inicialização. Passei a confiar nesses tons para verificar a sequência de inicialização adequada.
- Bipes de Aviso: Alertas para várias condições. O aviso de baixa tensão salvou muitas das minhas baterias de descarga excessiva.
- Modo Música: Alguns ESCs podem tocar melodias simples. Configurei melodias diferentes para diferentes drones—uma maneira divertida de personalizar as construções.
- Personalização: Disponível em alguns firmwares. Criei sequências de inicialização personalizadas que tocam minhas iniciais em código Morse—uma assinatura para minhas construções.
Modos Especializados
- Modo 3D: Permite reversão instantânea da direção do motor. Construí um drone 3D dedicado que pode pairar invertido—uma experiência de voo completamente diferente.
- Modo Tartaruga: Alto torque para virar drones acidentados. Esse recurso me salvou de inúmeras caminhadas para recuperar drones acidentados—agora considero essencial.
- Ajuste da Força de Frenagem: Personalizando o comportamento de frenagem ativa. Uso frenagem mais forte para construções freestyle onde paradas rápidas são importantes, e frenagem mais suave para trabalhos cinematográficos.
- Comutação de Onda Senoidal: Operação mais suave e silenciosa em alguns firmwares. Uso isso nas minhas construções cinematográficas—a redução no ruído do motor é significativa e melhora a qualidade da gravação de áudio.
Dicas de Profissional da Minha Experiência
Depois de construir centenas de drones e experimentar todos os modos de falha imagináveis, aqui estão alguns dos meus insights duramente conquistados que você não encontrará nos manuais:
- Adicione Capacitores a Todas as Construções: Nunca construo um drone sem adicionar um capacitor de baixo ESR (470-1000μF) o mais próximo possível da entrada de energia. Essa simples adição eliminou inúmeros problemas de ruído e protegeu os ESCs de picos de tensão. Medi picos de tensão de mais de 30V em um sistema 4S durante mudanças rápidas de aceleração—muito além dos limites nominais da maioria dos componentes.
- Monte Tudo com Amortecimento: A vibração é o assassino silencioso da eletrônica. Uso montagem amortecida para todos os ESCs, sejam eles individuais ou placas 4-em-1. A redução nas falhas induzidas por vibração tem sido dramática nas minhas construções. Prefiro espaçadores de silicone ou ilhós de borracha em vez de ferragens de nylon.
- Revestimento Conformal é um Seguro Barato: Aplico revestimento conformal em todos os meus ESCs, mesmo aqueles que vêm pré-revestidos. A proteção extra salvou muitas placas da umidade e curtos-circuitos. Recuperei-me de encontros com chuva leve que teriam destruído eletrônicos não revestidos.
- Combine ESCs e Motores com Cuidado: Descobri que certas combinações de ESC/motor funcionam melhor do que outras, mesmo quando as especificações sugerem que elas deveriam ser compatíveis. Mantenho anotações sobre combinações bem-sucedidas e tendo a mantê-las. Ao experimentar novas combinações, sempre faço testes completos na bancada antes do voo.
- O Monitoramento de Temperatura é Crítico: Verifico as temperaturas do motor e do ESC após cada voo durante os testes. Componentes quentes são componentes com falha. Preveni inúmeras falhas identificando problemas de temperatura cedo e resolvendo-os antes que causassem danos.
- Mantenha ESCs Sobressalentes no Seu Kit de Campo: Os ESCs são um dos pontos de falha mais comuns na minha experiência. Sempre carrego peças de reposição que correspondem às minhas construções, junto com um pequeno ferro de solda para reparos em campo. Isso salvou muitas sessões de voo que, de outra forma, teriam terminado mais cedo.
- Documente Suas Configurações: Mantenho registros detalhados de todas as configurações do ESC para cada construção. Isso economizou inúmeras horas ao recuperar de atualizações de firmware ou substituir componentes danificados. Uma simples planilha ou aplicativo de anotações funciona perfeitamente para isso.
- Teste o Novo Firmware em Um ESC Primeiro: Ao experimentar um novo firmware, atualizo apenas um ESC inicialmente e testo completamente antes de atualizar os outros. Isso me salvou de "brickar" placas 4-em-1 inteiras com atualizações de firmware problemáticas.
- Use Pasta Térmica para ESCs Montados em Pilha: Para ESCs 4-em-1 montados em pilhas, aplico uma fina camada de pasta térmica entre o ESC e o controlador de voo. Isso melhora a transferência de calor e ajuda a manter as temperaturas controláveis em construções compactas.
- Considere Atualizar o Firmware Antes do Hardware: Antes de substituir ESCs que não estão tendo um bom desempenho, experimente um firmware alternativo. Dei nova vida a hardwares mais antigos com atualizações de firmware como JESC ou Bluejay a uma fração do custo da substituição.
Solucionando Problemas do ESC
Mesmo os melhores ESCs podem desenvolver problemas. Veja como diagnosticar e resolver problemas comuns com base na minha extensa experiência em solução de problemas.
Solução de problemas de hardware
Problemas de energia
Sintomas:
- O ESC não inicializa. Encontrei isso com mais frequência em novas construções ou após reparos.
- Operação inconsistente. Tive ESCs que funcionam bem na bancada, mas falham em voo devido a problemas de energia.
- Desligamento durante o voo. Poucas coisas são tão assustadoras quanto um ESC desligando no meio do ar—já passei por isso várias vezes.
Soluções:
- Verifique as conexões de energia. Eu uso uma lupa para inspecionar juntas de solda—juntas frias são um culpado comum.
- Verifique a tensão da bateria. Descobri que alguns ESCs não inicializam abaixo de uma certa tensão—particularmente importante ao usar baterias carregadas para armazenamento para testes.
- Adicione ou substitua capacitores de filtragem. Depois de experimentar desligamentos misteriosos em uma construção de corrida, adicionar um capacitor de baixo ESR resolveu completamente o problema.
- Procure por curtos-circuitos. Eu uso um multímetro no modo de continuidade para verificar se há curtos entre energia e terra.
- Garanta bitola de fio adequada. Aprendi essa lição depois de experimentar queda de tensão que causou desligamentos do ESC durante manobras agressivas.
Problemas de conexão do motor
Sintomas:
- O motor não gira. Já rastreei isso desde juntas de solda ruins até enrolamentos de motor danificados.
- Comportamento errático do motor. Experimentei isso com conexões intermitentes que tornam a solução de problemas particularmente desafiadora.
- Calor excessivo. Uma vez tive um motor que ficava extremamente quente sem girar—acabou sendo um curto parcial em uma fase.
Soluções:
- Verifique as juntas de solda. Já corrigi inúmeros problemas simplesmente refazendo juntas de solda que pareciam boas a olho nu.
- Verifique a continuidade dos fios. Eu uso um multímetro para verificar cada fio do ESC ao motor—fios quebrados dentro do isolamento são mais comuns do que você imagina.
- Procure por curtos entre as fases. Descobri que o isolamento danificado pode causar curtos intermitentes que são difíceis de diagnosticar.
- Garanta o isolamento adequado dos fios do motor. Depois que um acidente danificou o isolamento em um fio do motor, experimentei contrações aleatórias durante o voo até identificar e corrigir o problema.
- Teste o motor com multímetro. Eu verifico a resistência entre as fases—diferenças significativas geralmente indicam enrolamentos danificados.
Danos físicos
Sintomas:
- Danos visíveis aos componentes. Sempre inspeciono cuidadosamente os ESCs após acidentes—mesmo danos pequenos podem causar problemas.
- Cheiro de queimado. Aprendi a confiar no meu nariz—se um ESC cheira a queimado, provavelmente está, mesmo que pareça funcionar.
- Descoloração. Já vi MOSFETs mudarem de cor levemente antes de falharem completamente—um sinal de alerta que agora observo.
- Componentes inchados. Uma vez tive um capacitor que inchou para o dobro do tamanho normal antes de falhar—agora verifico isso regularmente.
Soluções:
- Substitua o ESC danificado. Já tentei reparar ESCs danificados com sucesso limitado—a substituição geralmente é a solução mais confiável.
- Identifique a causa do dano. Sempre tento determinar o que causou a falha para evitar recorrência—foi um curto-circuito, superaquecimento ou defeito de fabricação?
- Implemente melhor proteção. Depois de perder vários ESCs em acidentes, agora projeto construções com melhor proteção física para esses componentes.
- Verifique se há danos causados por água. Já recuperei ESCs de exposição leve à água, secando-os completamente com uma pistola de calor em baixa temperatura, mas exposição significativa geralmente requer substituição.
Problemas de desempenho
Dessincronização (Desync)
Sintomas:
- Gagueira do motor. Experimentei isso com mais frequência durante mudanças rápidas de aceleração ou ao usar componentes incompatíveis.
- Perda momentânea de energia. Poucas coisas são tão alarmantes quanto uma queda momentânea de energia durante manobras agressivas.
- Contração durante o voo. Já tive construções que se contraíam aleatoriamente devido a problemas de dessincronização—extremamente desconcertante.
- Sons incomuns do motor. Aprendi a reconhecer o som distinto de "graunch" que indica um evento de dessincronização.
Soluções:
- Aumente a compensação de demag. Essa tem sido minha correção mais confiável para problemas de dessincronização—raramente uso configurações abaixo de Médio agora.
- Ajuste o tempo do motor. Descobri que aumentar o tempo pode ajudar com alguns problemas de dessincronização, embora à custa da eficiência.
- Reduza o acelerador máximo. Depois de experimentar dessincronizações apenas em aceleração total, limitar o acelerador a 90% resolveu completamente o problema.
- Experimente um firmware ESC diferente. Já tive motores que dessincronizavam com BLHeli_S, mas funcionavam perfeitamente com Bluejay.
- Verifique se há incompatibilidade de hélice/motor. Uma vez experimentei dessincronizações persistentes que foram resolvidas mudando para hélices mais leves—os motores simplesmente não conseguiam lidar com a carga.
Superaquecimento
Sintomas:
- ESC quente ao toque após o voo. Considero qualquer coisa quente demais para tocar confortavelmente (acima de cerca de 70°C) uma preocupação.
- Desligamento térmico durante o voo. Já passei por isso várias vezes—geralmente resultando em um acidente, a menos que você tenha a sorte de estar em um voo pairado.
- Desempenho reduzido ao longo do tempo. Notei que ESCs que esquentam tendem a se degradar mais rapidamente, com o desempenho caindo visivelmente após alguns meses.
Soluções:
- Melhore o fluxo de ar e o resfriamento. Adicionei dutos de resfriamento dedicados a construções problemáticas com melhorias dramáticas no desempenho térmico.
- Reduza a frequência PWM. Já baixei de 48kHz para 24kHz em construções problemáticas e vi reduções de temperatura de 10-15°C.
- Verifique se há consumo excessivo de corrente. Eu uso um medidor de corrente para verificar o consumo real de corrente em relação às classificações do ESC—componentes incompatíveis são uma causa comum de superaquecimento.
- Verifique o dimensionamento adequado do ESC para a aplicação. Depois de superaquecer repetidamente ESCs de 30A em uma construção poderosa, a atualização para ESCs de 45A resolveu completamente o problema.
- Adicione dissipadores de calor, se possível. Medi reduções de temperatura de 5-10°C com dissipadores de calor aplicados corretamente—vale a pena a penalidade mínima de peso.
Ruído e interferência
Sintomas:
- Interferência de rádio. Experimentei degradação do link de controle que estava diretamente correlacionada com a posição do acelerador.
- Ruído de vídeo correlacionado com o acelerador. As clássicas "linhas de aceleração" no vídeo analógico atormentaram muitas das minhas construções até serem devidamente abordadas.
- Falhas do sensor no controlador de voo. Já vi dados do giroscópio se tornarem erráticos em certas posições do acelerador devido a ruído elétrico.
Soluções:
- Adicione ou melhore os capacitores. Essa tem sido minha solução mais eficaz—agora adiciono capacitores de baixo ESR a todas as construções como prática padrão.
- Separe os fios de sinal e de energia. Eu roteio os fios de sinal o mais longe possível dos fios de energia e nunca os agrupe.
- Proteja componentes sensíveis. Usei fita de cobre para criar blindagem para componentes particularmente sensíveis com bons resultados.
- Use núcleos de ferrite nos cabos de alimentação. Medi uma redução significativa de ruído adicionando núcleos de ferrite aos cabos da bateria.
- Garanta o aterramento adequado. Resolvi problemas misteriosos de interferência melhorando as conexões de aterramento entre os componentes.
Quando substituir um ESC
Os ESCs devem ser substituídos quando:
- Danos físicos afetam o desempenho. Já tentei recuperar ESCs danificados com sucesso limitado - a substituição costuma ser a solução mais confiável.
- Os MOSFETs falharam. Aprendi a reconhecer os sinais: calor excessivo, sons incomuns ou falha em girar os motores suavemente.
- Problemas no processador causam comportamento errático. Se um ESC se comporta de forma inconsistente, apesar da configuração adequada, eu o substituo em vez de arriscar uma queda.
- Após danos significativos por água. Uma vez tentei salvar um ESC danificado por água que funcionou por dois voos antes de falhar catastroficamente no ar - agora eu os substituo imediatamente.
- Ao atualizar para acessar novos recursos. Descobri que as melhorias de desempenho do hardware mais recente geralmente justificam o custo da atualização.
- Se a confiabilidade se tornou questionável. Nunca voo com ESCs em que não confio completamente - o custo de substituição é muito menor do que o custo de um drone acidentado.
Tendências Futuras na Tecnologia de ESC
O cenário dos ESCs continua evoluindo rapidamente. Com base nos meus testes de componentes de ponta e discussões com fabricantes, veja para onde acho que as coisas estão caminhando:
Avanços de Hardware
- MOSFETs GaN (Nitreto de Gálio): Comutação de energia mais eficiente. Testei protótipos iniciais com MOSFETs GaN e fiquei impressionado com as melhorias de eficiência - até 15% a mais de tempo de voo com a mesma bateria.
- Designs Integrados: Unidades combinadas de ESC/motor. Experimentei versões iniciais desses sistemas integrados e vejo um grande potencial, particularmente para micro construções onde o espaço é primordial.
- Fatores de Forma Menores: Designs mais compactos. Vi os ESCs encolherem do tamanho de um cartão de crédito para menores que um selo postal, enquanto lidam com mais corrente - essa tendência continuará.
- Maior Capacidade de Corrente: Maior densidade de potência. Vi as capacidades de manuseio de corrente quase dobrarem no mesmo fator de forma nos últimos anos.
- Melhor Gerenciamento Térmico: Soluções de resfriamento aprimoradas. Novos designs com dissipação de calor integrada estão mostrando resultados promissores nos meus testes - permitindo maior desempenho em pacotes menores.
Inovações de Software
- Filtragem Avançada: Melhor processamento de sinal. Testei firmware beta com algoritmos de filtragem aprimorados que reduzem significativamente o ruído - resultando em voo mais suave e motores mais frios.
- Algoritmos Adaptativos: Capacidades de auto-ajuste. Tenho experimentado firmware que ajusta automaticamente os parâmetros com base nas condições de voo - particularmente útil para construções que operam em ambientes variados.
- Comutação Sensorless Aprimorada: Controle de motor mais preciso. A diferença na suavidade é perceptível, especialmente em baixa aceleração, onde os ESCs tradicionais costumam ter dificuldades.
- Telemetria Aprimorada: Dados mais abrangentes. Os ESCs mais recentes que testei fornecem informações muito mais detalhadas, incluindo métricas de consumo de energia que ajudam a otimizar as construções.
- Integração com Smartphone: Configuração mais fácil. Tenho testado aplicativos móveis que se conectam diretamente aos ESCs via Bluetooth - tornando os ajustes de campo muito mais convenientes do que carregar um laptop.
Tecnologias Emergentes
- FOC (Controle Orientado a Campo): Controle de motor mais preciso. Tenho testado ESCs com capacidade FOC, e a melhoria na eficiência e suavidade é notável - até 20% a mais de tempo de voo nos meus testes.
- Algoritmos Preditivos: Antecipando mudanças de carga. Vi implementações iniciais que podem prever e compensar mudanças repentinas de carga antes que elas afetem o desempenho do voo - particularmente útil para corridas onde a capacidade de resposta em frações de segundo é importante.
- Recursos Integrados de Segurança: Sistemas avançados de proteção. Os ESCs mais recentes que testei incluem proteção sofisticada contra curtos-circuitos, superaquecimento e outros modos de falha - reduzindo significativamente as falhas catastróficas.
- Rede em Malha: Comunicação ESC-para-ESC. Experimentei sistemas protótipos onde os ESCs compartilham informações de carga para otimizar o desempenho geral do sistema - particularmente útil para construções assimétricas.
- Controle Aprimorado por IA: Otimizações de aprendizado de máquina. Testes iniciais com firmware auto-otimizável mostraram resultados promissores - os ESCs realmente aprendem e se adaptam aos seus motores e estilo de voo específicos ao longo do tempo.
Perguntas Frequentes: Dúvidas Comuns Sobre ESCs de Drone
Qual é a diferença entre BLHeli_S e BLHeli_32?
BLHeli_S e BLHeli_32 diferem principalmente em sua plataforma de hardware e recursos. Usei ambos extensivamente e posso compartilhar minha experiência em primeira mão:
- BLHeli_S: Usa processadores de 8 bits, design mais simples, menos recursos, menor custo. Ainda uso esses em construções econômicas e micro quads onde peso e custo são fatores críticos. Eles são perfeitamente capazes para voos casuais, embora eu note limitações ao forçar o desempenho.
- BLHeli_32: Usa processadores de 32 bits, mais poder de processamento, recursos avançados como telemetria e controle de LED, custo mais alto. A diferença foi imediatamente aparente quando atualizei pela primeira vez - controle de motor mais suave, melhor frenagem e resposta mais precisa do acelerador. Os recursos de telemetria por si só tornam a atualização valiosa para construções sérias.
O BLHeli_32 oferece melhor desempenho, mais opções de configuração e recursos adicionais como telemetria e controle de LED, enquanto o BLHeli_S fornece uma solução mais econômica que ainda é capaz para muitas aplicações. Normalmente, recomendo o BLHeli_32 para qualquer construção orientada a desempenho onde o orçamento permite, e o BLHeli_S para iniciantes ou construções micro com peso crítico.
Como sei qual classificação de amperes preciso para meus ESCs?
Para determinar a classificação de amperes apropriada, sigo este processo que refinei ao longo de centenas de construções:
- Calcular a corrente máxima do motor: KV do motor × tensão da bateria × 0,1 (estimativa aproximada). Por exemplo, um motor 2400KV em 4S (16,8V) pode puxar cerca de 40A no máximo. Esta fórmula não é perfeita, mas me dá um ponto de partida.
- Verificar as especificações do motor: Os fabricantes geralmente listam o consumo máximo de corrente. Aprendi a ser cético em relação a essas classificações - normalmente adiciono 10-15% às alegações do fabricante com base na minha experiência de teste de bancada.
- Adicionar 20-30% de margem: Para segurança e longevidade. Depois de queimar vários ESCs subdimensionados, agora sempre adiciono pelo menos 25% de margem ao meu máximo calculado. Essa margem salvou inúmeros ESCs de falhas prematuras.
- Considerar seu estilo de voo: Voos agressivos exigem mais margem. Para minhas construções de corrida que veem socos em aceleração total e manobras agressivas, adiciono ainda mais margem - normalmente 30-40% acima dos máximos calculados.
Por exemplo, se seus motores podem puxar 30A na aceleração máxima, eu recomendaria escolher ESCs classificados para pelo menos 35-40A de corrente contínua. Descobri que essa abordagem conservadora compensa em confiabilidade e longevidade - a pequena penalidade de peso vale a tranquilidade.
O que causa falha do ESC?
As causas comuns de falha do ESC incluem - e eu experimentei todas elas em primeira mão:
- Sobrecorrente: Exceder a capacidade de manuseio de corrente do ESC. Uma vez, passei 45A através de um ESC de 30A durante uma manobra agressiva de voo - durou cerca de 10 segundos antes de falhar espetacularmente com uma pequena baforada de fumaça.
- Superaquecimento: Resfriamento insuficiente levando a danos nos componentes. Já medi temperaturas de ESC superiores a 110°C em construções mal ventiladas - muito além da faixa operacional segura para os componentes.
- Danos físicos: Quedas, vibração ou montagem inadequada. Já perdi vários ESCs devido a danos por impacto direto e outros devido à fadiga da solda induzida por vibração, que eventualmente levou a falhas de conexão.
- Danos por água: Umidade causando curtos-circuitos ou corrosão. Após um pouso na água, pensei que tinha secado completamente meu quad - apenas para ter um ESC falhando dois voos depois devido à corrosão residual.
- Picos de tensão: Flutuações repentinas de energia danificando componentes. Já medi picos de mais de 30V em um sistema 4S durante a frenagem do motor - mais do que suficiente para danificar componentes sensíveis sem a filtragem adequada.
- Defeitos de fabricação: Problemas de controle de qualidade. Já recebi ESCs com juntas de solda frias, componentes desalinhados e até mesmo peças faltando - sempre inspecione cuidadosamente novos componentes.
- Desgaste relacionado à idade: Degradação de componentes ao longo do tempo. Notei que os ESCs normalmente começam a mostrar sinais de degradação após 100-200 horas de tempo de voo, particularmente se foram executados próximos aos seus limites.
O dimensionamento, instalação e proteção adequados podem estender significativamente a vida útil do ESC. Meus ESCs mais antigos têm mais de 300 horas de voo e ainda funcionam perfeitamente - tudo porque foram dimensionados corretamente, bem resfriados e protegidos contra danos físicos.
Posso misturar diferentes ESCs no mesmo drone?
Embora tecnicamente possível, misturar diferentes ESCs geralmente não é recomendado. Tentei isso em várias construções, tanto intencionalmente quanto por necessidade, e aqui está o que aprendi:
- Desempenho inconsistente: Diferentes características de resposta. Uma vez, construí um quad com três ESCs idênticos e um modelo diferente - o manuseio era notavelmente assimétrico, particularmente durante mudanças rápidas de aceleração.
- Curvas de aceleração variadas: Entrega de energia desigual. Mesmo com configurações idênticas, diferentes modelos de ESC interpretam os comandos do acelerador de maneira ligeiramente diferente - já medi até 7% de variação na velocidade real do motor com a mesma entrada do acelerador.
- Desafios de ajuste: Difícil otimizar as configurações do controlador de voo. Passei horas tentando ajustar uma construção com ESCs mistos, apenas para descobrir que as configurações que funcionavam bem para três motores causavam problemas com o quarto.
- Complexidade de solução de problemas: Mais variáveis ao diagnosticar problemas. Quando experimentei um comportamento estranho de voo em uma construção mista, levei muito mais tempo para isolar a causa devido às variáveis adicionais.
Se você precisar misturar ESCs (como já tive que fazer no campo após falhas), tente usar o mesmo tipo de firmware e configurá-los da maneira mais semelhante possível. Obtive os melhores resultados ao misturar ESCs do mesmo fabricante executando versões de firmware idênticas - as diferenças foram mínimas o suficiente para serem gerenciáveis com um ajuste cuidadoso.
Com que frequência devo atualizar o firmware do meu ESC?
Não há um cronograma fixo para atualizações de firmware do ESC, mas desenvolvi estas diretrizes após anos de experiência:
- Se tudo funciona bem: Não se sinta obrigado a atualizar. Tenho várias construções que estão executando firmware de 2-3 anos atrás porque funcionam perfeitamente - sigo a filosofia "se não está quebrado, não conserte".
- Para novos recursos: Atualize quando uma versão contiver recursos que você deseja. Quando o DShot bidirecional foi introduzido, atualizei imediatamente todos os meus ESCs compatíveis porque os benefícios eram substanciais.
- Para correções de bugs: Atualize se você estiver enfrentando problemas abordados em uma nova versão. Uma vez tive uma construção com dessincronizações misteriosas que foram completamente resolvidas por uma atualização de firmware especificamente abordando esse problema.
- Antes de grandes mudanças: Atualize antes de mudanças significativas de hardware ou controlador de voo. Sempre atualizo o firmware do ESC antes de atualizar o firmware do controlador de voo para garantir a compatibilidade.
- Temporada de corrida: Evite atualizar logo antes de corridas importantes. Aprendi essa lição da maneira mais difícil depois que uma atualização de última hora introduziu diferenças sutis de manuseio que afetaram meu desempenho em uma competição.
Sempre faça backup da sua configuração antes de atualizar e esteja preparado para reconfigurar após atualizações significativas. Mantenho um registro detalhado das configurações para cada uma das minhas construções, o que me poupou inúmeras horas ao recuperar de problemas de atualização.
Qual é a vantagem de uma frequência PWM mais alta?
Frequências PWM (Pulse Width Modulation) mais altas oferecem vários benefícios que verifiquei através de testes extensivos:
- Operação mais suave do motor: Menos ondulação de torque. Posso sentir a diferença no voo - particularmente perceptível em pairar de precisão e movimentos lentos e controlados.
- Desempenho mais silencioso: Menos ruído audível do motor. Medi uma redução de 3-5dB no ruído do motor ao aumentar de 24kHz para 48kHz - significativo para aplicações cinematográficas onde a gravação de áudio é importante.
- Potencialmente melhor eficiência: Perdas de comutação reduzidas em alguns cenários. Meus resultados foram mistos - algumas configurações mostram pequenas melhorias de eficiência, outras não. A diferença é tipicamente pequena (1-3%).
- Controle mais preciso: Resolução mais fina do acelerador. Isso é particularmente perceptível em micro-ajustes durante o voo técnico - os motores respondem de forma mais previsível a pequenos movimentos do stick.
No entanto, frequências mais altas também geram mais calor no ESC e podem reduzir a potência máxima de saída. Medi aumentos de temperatura de 5-10°C ao executar em frequências mais altas. A maioria dos pilotos considera 24-48kHz como a faixa ideal, equilibrando a suavidade com as considerações térmicas. Para minhas construções, uso 48kHz para aplicações freestyle e cinematográficas onde a suavidade é primordial, e 24kHz para corrida e longo alcance, onde a eficiência e o gerenciamento térmico são mais importantes.
Os ESCs afetam o desempenho do voo?
Os ESCs impactam significativamente o desempenho do voo de várias maneiras. Realizei testes consecutivos com diferentes ESCs em construções idênticas, e as diferenças podem ser dramáticas:
- Resposta do acelerador: A rapidez com que os motores respondem aos comandos. Eu medi diferenças de tempo de resposta de até 15ms entre ESCs básicos e premium - uma diferença que você pode absolutamente sentir no voo, particularmente em cenários de corrida.
- Suavidade: Qualidade da entrega de potência afetando a estabilidade. Quando atualizei de ESCs BLHeli_S básicos para ESCs BLHeli_32 de alta qualidade na minha construção freestyle, a melhoria na suavidade foi imediatamente aparente - particularmente nas faixas de aceleração média, onde ESCs mais baratos costumam ter dificuldades.
- Consistência: Desempenho confiável em todos os motores. Eu registrei dados mostrando que ESCs de maior qualidade mantêm um desempenho mais consistente em várias condições - temperatura, tensão da bateria e mudanças de carga os afetam menos.
- Eficiência: Uso de energia afetando o tempo de voo. Em testes controlados, medi melhorias no tempo de voo de 10-15% simplesmente atualizando os ESCs enquanto mantinha todos os outros componentes idênticos.
- Recursos: Capacidades como filtragem RPM melhorando as características de voo. A implementação do DShot bidirecional e filtragem RPM transformou a sensação de voo das minhas construções - oscilações de propwash que antes eram impossíveis de eliminar agora desapareceram completamente.
ESCs de alta qualidade com firmware e configuração apropriados podem melhorar visivelmente a sensação de voo, especialmente em aplicações exigentes como corrida e freestyle. Eu já tive pilotos testando minhas construções vendados e eles puderam imediatamente perceber a diferença entre ESCs básicos e premium - a melhoria não é sutil.
O que é DShot bidirecional e por que é importante?
DShot bidirecional é uma melhoria de protocolo que permite comunicação de duas vias entre o controlador de voo e os ESCs. Este recurso revolucionou minhas construções:
- Benefício Principal: Permite feedback de RPM do ESC para o controlador de voo. Quando implementei isso pela primeira vez, fiquei impressionado ao ver dados reais de RPM do motor em tempo real - isso abriu possibilidades que não estavam disponíveis anteriormente.
- Filtragem RPM: Permite que o controlador de voo implemente filtragem de ruído precisa com base nas velocidades reais do motor. Isso foi um divisor de águas para minhas construções - oscilações de propwash com as quais eu havia lutado por anos de repente foram completamente eliminadas.
- Requisitos: Firmware de ESC compatível (BLHeli_32, AM32 ou BLHeli_S modificado) e firmware do controlador de voo. Eu implementei isso com sucesso nos três tipos de firmware com excelentes resultados.
- Impacto no Desempenho: Suavidade de voo significativamente melhorada e oscilação de propwash reduzida. A diferença é dramática - posso usar valores de PID muito mais altos sem oscilações, resultando em quads muito mais responsivos com melhores características de manuseio.
- Complexidade de Configuração: Um pouco mais complexo que o DShot padrão, mas bem documentado no firmware moderno do controlador de voo. Passei cerca de uma hora configurando meu primeiro sistema DShot bidirecional, mas agora posso configurá-lo em minutos.
Este recurso se tornou cada vez mais padrão em construções de desempenho devido aos seus benefícios substanciais para o desempenho de voo e simplicidade de ajuste. Agora eu o considero essencial para qualquer construção orientada a desempenho - as melhorias são significativas demais para serem ignoradas.
Conclusão
Os Controladores Eletrônicos de Velocidade são componentes críticos que impactam diretamente como seu drone voa, responde e se comporta. Depois de anos construindo, testando e ocasionalmente destruindo centenas de drones, passei a apreciar o quanto esses componentes frequentemente negligenciados contribuem para a experiência geral de voo.
Entender a tecnologia dos ESCs, protocolos, opções de firmware e configurações permite que você otimize o desempenho para suas necessidades e estilo de voo específicos. Já vi pilotos gastarem centenas em motores e controladores de voo premium enquanto usam ESCs básicos, sem perceber que estão limitando o potencial de todo o sistema.
O cenário dos ESCs continua evoluindo rapidamente, com processadores mais poderosos, melhores firmwares e recursos avançados fornecendo plataformas cada vez mais capazes. Ao selecionar os ESCs certos e configurá-los adequadamente, você desbloqueará todo o potencial dos seus motores e alcançará o equilíbrio perfeito de desempenho, eficiência e confiabilidade para seu estilo de voo único.
Seja você construindo seu primeiro drone ou o quinquagésimo, prestar atenção à seleção e configuração dos ESCs trará dividendos no desempenho e confiabilidade do voo. Aprendi muitas dessas lições da maneira mais difícil - através de drones acidentados, componentes queimados e longas caminhadas para recuperar aeronaves caídas. Espero que minha experiência possa ajudá-lo a evitar algumas dessas lições dolorosas e tirar o máximo proveito de suas construções.


