ドローンESC:原理と動作
電子スピードコントローラー(ESC)は、フライトコントローラーとモーターの間の重要なリンクであり、デジタルコマンドを正確な電力供給に変換して、ドローンを空中に保ちます。何百ものドローンを製作してテストした何年もの経験から、これらの洗練されたデバイスは単なるモータードライバー以上のものであり、独自のプロセッサー、ファームウェア、機能を備えた機能豊富なコンポーネントであることを理解するようになりました。ESCの故障は、単にドローンが墜落するだけでなく、多くの場合、困難な地形を長い距離歩いて、プライドと喜びの残骸を回収することを意味するということを、私は苦い経験から学びました。
この包括的なガイドでは、私の豊富な実践的経験に基づいて、ESC技術、プロトコル、ファームウェアオプション、選択基準、および高度な機能を探求します。技術的な仕様だけでなく、無数のビルド、クラッシュ、トラブルシューティングセッションを通じて得た実用的な洞察を共有し、FPVドローンのこの重要なコンポーネントを理解し最適化するのに役立ちます。
電子スピードコントローラーの紹介
ESCは、ブラシレスモーターの速度を制御および調整する電子回路です。モーターを一定の速度で回転させるのがやっとだった原始的なESCを使った最初のビルドを今でも覚えています。今日使用している洗練されたデバイスとは程遠いものでした。FPVドローンでは、ESCはビルドを重ねるごとにその重要性をより深く理解するようになったいくつかの重要な機能を実行します:
- モーター制御: DCバッテリー電力をブラシレスモーターに必要な3相AC電力に変換します。安価なESCが生み出す荒く騒々しいモーター動作と、高品質なESCが提供するスムーズで正確な電力供給の違いを目の当たりにしてきました。
- 速度制御: フライトコントローラーのコマンドに基づいてモーターのRPMを正確に制御します。ドローンの応答性は、ESCがモーター速度をどれだけ素早く調整できるかに大きく依存します。これは新しいビルドをテストするときにすぐに気づくことです。
- ブレーキ: 必要に応じてモーターを積極的に減速または停止させます。特にフリースタイル飛行では、素早い停止と方向転換が不可欠なため、これが特に重要だと感じています。
- バッテリー保護: 電圧を監視し、カットオフを実装して損傷を防ぎます。適切な低電圧保護のおかげで、数え切れないほどのバッテリーを早すぎる死から救ってきました。
- テレメトリー: パフォーマンス、温度、RPMに関するデータを提供します(上級モデルの場合)。この機能は、ほんの数年前には不可能だった洞察を与え、クアッドのチューニング方法を変革しました。
ドローン用ESCの進化
私が趣味を始めた2019年以降でさえ、ESCの劇的な進化を目の当たりにしてきましたが、その進歩は驚くべきものでした:
- 初期のESC(2010-2014年): 限られた機能とSimonKファームウェアを備えた基本的なモータードライバー。慎重なキャリブレーションが必要で、最小限のパフォーマンスしか提供できないこれらの原始的なデバイス。
- BLHeli時代(2015-2017年): パフォーマンスの向上、デジタルプロトコル、設定オプション。これは画期的なことでした。突然、人々はフライトコントローラーを介してESCに接続し、はんだ付けやハードウェアプログラマーを使用せずに設定を調整できるようになったのです。
- BLHeli_S(2017-2018年): 処理能力の向上、パフォーマンスの向上、より多くの機能。
- BLHeli_32(2018年〜現在): 32ビット処理、テレメトリー、高度な機能。
- 最新の選択肢(2020年以降): AM32、JESC、その他のユニークな機能を備えたファームウェアオプション。特にAM32を使って古いハードウェアに新しい命を吹き込む実験をしています。
この進歩により、ますます洗練された機能とパフォーマンスを備えた、より小型で高性能なESCが生まれました。私自身、各アームに取り付ける必要があった大型の個別のESCから、はるかに多くの機能を提供しながら、1つの古いESCよりも軽量な小型の4-in-1ボードへと移行してきました。
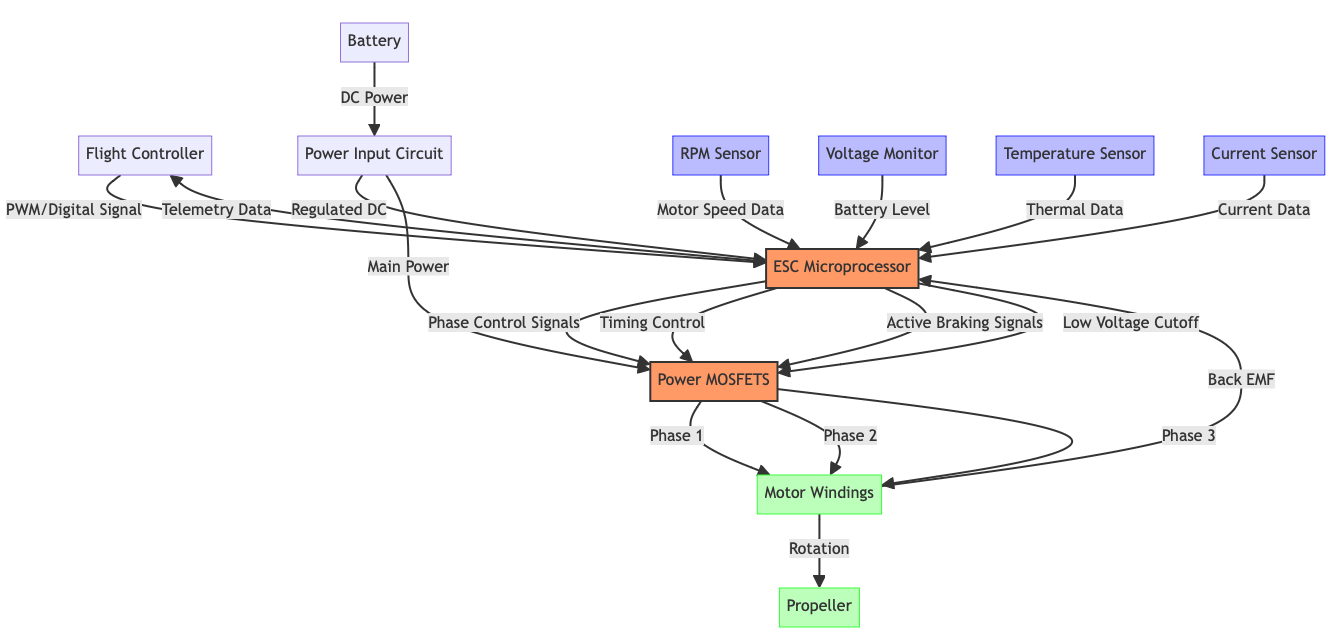
ESCの基本コンポーネント
最新のESCには、飛行体験を生み出すために連携して機能するいくつかの重要なコンポーネントが統合されています。長年のビルドとトラブルシューティングを通じて学んだこれらのコンポーネントについて説明しましょう。
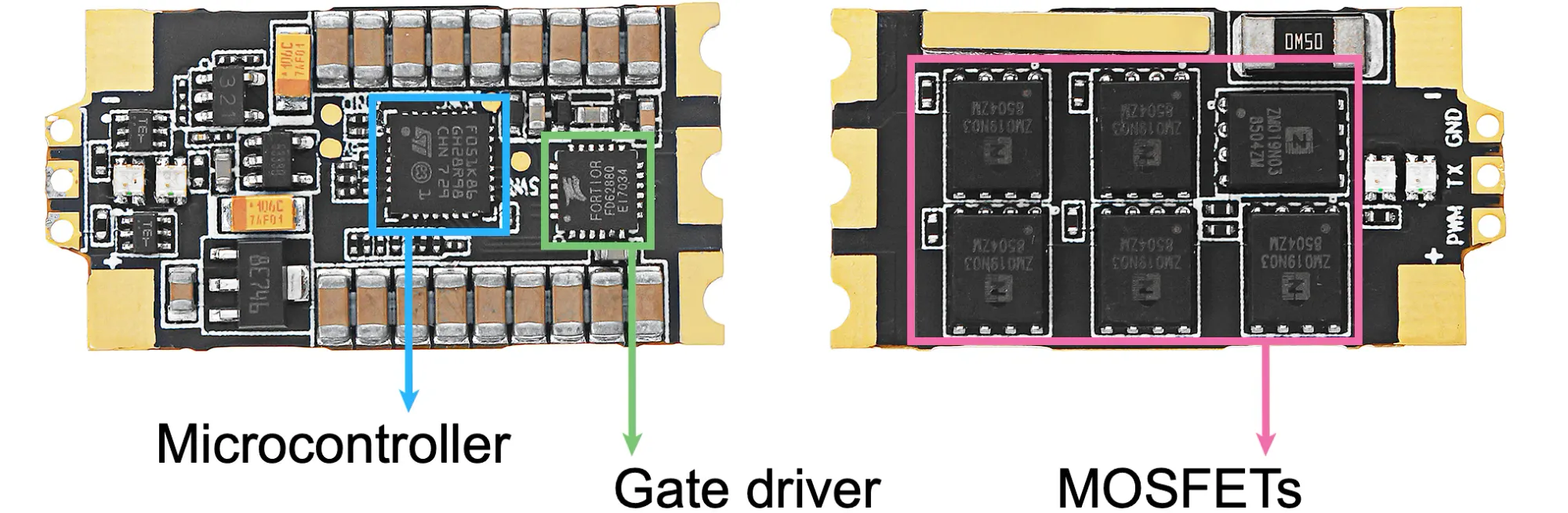
マイクロプロセッサ
ESCの頭脳であり、コマンドを処理し、電力供給を制御します:
- 8ビットプロセッサ: 古いESCと低価格のBLHeli_Sモデルに搭載。私はこれから始めましたが、仕事はこなせるものの、パフォーマンスを追求する上での制限にいらだちを感じました。
- 32ビットプロセッサ: BLHeli_32と新しいESCで使用され、より多くの処理能力を提供。32ビットESCにアップグレードした最初の時、応答性と機能の違いにすぐに気づきました。
- ARM Cortex: ハイパフォーマンスESCでよく使われ、高度な機能を可能にします。応答時間のミリ秒単位が重要な競技用ビルドではこれを使用しています。
MOSFET(金属酸化物半導体電界効果トランジスタ)
モーター相への電流の流れを制御する電力スイッチングコンポーネント。MOSFETの品質が、プレミアムESCと低価格ESCを分ける要因であることがわかりました:
- MOSFETの品質:効率、発熱、電流処理能力を決定します。安物のMOSFETを使って十分に苦労した経験から、ここに投資することが信頼性とパフォーマンスの向上につながることを知っています。
- MOSFETの数:通常、モーターあたり6個(フェーズあたり2個)。私の高性能ビルドの中には、電流処理能力と熱分散を向上させるために、MOSFETを倍増したESCを使用しているものもあります。
- MOSFETの配置:パフォーマンスと耐久性に影響します。MOSFETのレイアウトが優れているESCは、高負荷時でも冷却性能が高い傾向にあることに気づきました。
サポートコンポーネント
適切な動作を可能にする追加の回路。これらの見落とされがちなコンポーネントは、パフォーマンスに大きな違いをもたらすことがあります:
- コンデンサ:ノイズをフィルタリングし、電力供給を滑らかにします。電気ノイズがフライトパフォーマンスに影響を与える可能性があることを痛感した後、私は常にビルドに追加のフィルタリングコンデンサを追加しています。
- 電圧レギュレータ:マイクロプロセッサに適切な電力を供給します。特に高電圧セットアップで動作させる場合、電圧調整の不良でESCが故障したことがあります。
- 電流センサ:消費電力を測定します(テレメトリー対応ESCの場合)。これらのセンサの精度は大きく異なります。高級ESCは電流測定がより正確である傾向があることがわかりました。
- 温度センサ:保護のために熱を監視します(上級モデルの場合)。この機能により、長い夏のフライトセッション中に複数のビルドが熱損傷から救われました。
入出力インターフェース
通信と電力のための接続:
- 信号入力:フライトコントローラからのコマンドを受信します。これらの接続の品質が信頼性に大きく影響することがわかりました。ここでのコールドはんだ接合が、私のビルドでの不可解な故障の原因となったことが何度かあります。
- 電源接続:バッテリー入力とモーター出力パッド。ここでは常に適切なゲージのワイヤーを使用しています。サイズの小さすぎるワイヤーはピーク電流に耐えられないことを、壮大な失敗を通して学びました。
- テレメトリー出力:(サポートされている場合)データをフライトコントローラに送り返します。この機能により、飛行中のクアッドの監視方法が変わり、コンポーネントの損傷を防ぐのに役立つリアルタイムデータが提供されるようになりました。
ESCのハードウェアタイプと構成
ESCには、さまざまなビルドや要件に合わせて、さまざまなフォームファクターと構成があります。長年にわたり、私は利用可能なほぼすべてのタイプのESC構成を使用してきましたが、何を構築するかによって、それぞれに適した場所があります。
個別型vs4-in-1 ESC
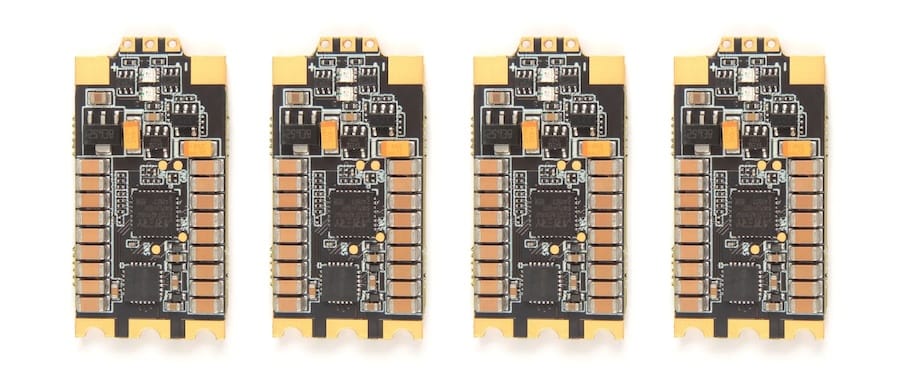
個別型ESC
各モーターに個別のESCを使用。私はこれから始めて、今でも特定のビルドに使用しています:
利点:
- 1つが故障した場合の交換が容易。フィールドキットに予備の個別ESCを用意しておくことで、無数のフライトセッションを救ってきました。
- 優れた放熱性。電流処理の限界に挑戦するハイパフォーマンスビルドでは、これが特に重要であることがわかりました。
- 必要に応じて定格を混在させることができる。異なるモーターに異なるESC定格が必要な非対称クアッドを構築したことがあります。
- 多くの場合、より柔軟な取り付けオプション。標準的な取り付けが不可能な変わったビルドを作成したことがあります。
欠点:
- 配線が複雑になる。ビルドをきれいに保つために、何時間もかけて丹念に配線を行ってきました。
- 合計重量が増える可能性がある。レーシングビルドでは1グラムが重要で、4-in-1ソリューションと比較して10〜15gの差を測定したことがあります。
- フレーム上のスペースを多く占有する。これにより、追加できる他のコンポーネントが制限されます。
- 通常、合計でより高価になる。個別のESCを使用する場合、私は通常20〜30%多く費やしています。
最適な用途:
- 十分なスペースがある大型ビルド。私のロングレンジクルーザーは通常、個別のESCを使用しています。
- 修理性を重視するパイロット。私は、リモートエリアを飛行する友人にこれらを勧めています。
- モーターの要件が異なるカスタムビルド。実験的な非対称構成にこれらを使用したことがあります。
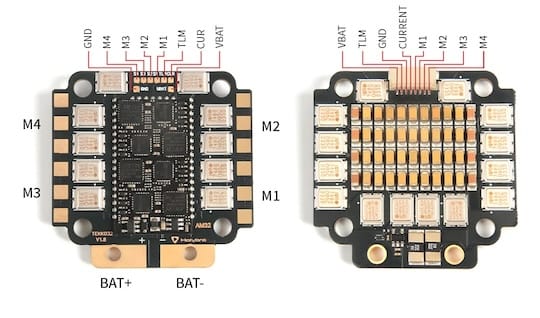
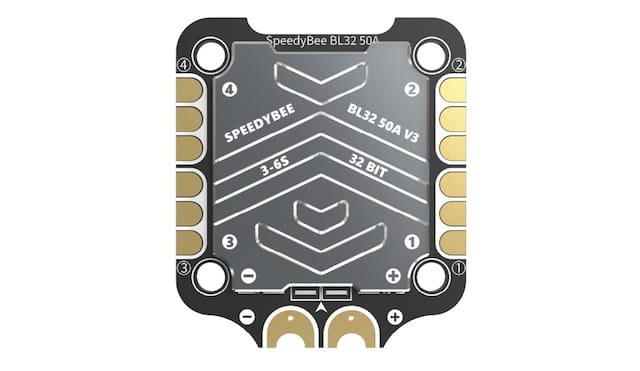
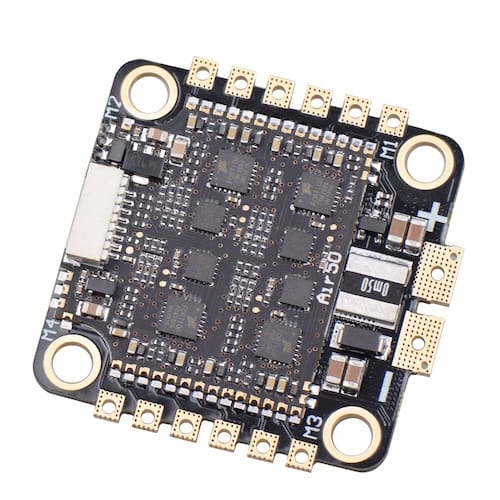
4-in-1 ESCボード
4つのESCが1枚のPCBに統合されています。これは、ほとんどのビルドで私のデファクトスタンダードになっています:
利点:
- よりクリーンでシンプルな配線。4-in-1 ESCに切り替えたとき、私のビルドははるかに整然としたものになりました。
- 通常、合計重量が軽くなる。4-in-1 ESCを使用することで、レーシングビルドで最大15gを節約できました。
- スペースを取らない。これにより、よりコンパクトなビルドや追加コンポーネントのためのスペースが確保できます。
- パッケージとしてより手頃な価格になることが多い。同等の個別ESCと比較して、通常20〜30%節約できます。
- インストールが容易。4-in-1 ESCを使用すると、ビルドを約半分の時間で完了できます。
欠点:
- 1つのESCが故障すると、ボード全体を交換する必要がある場合がある。単一のモーターショートでボード全体を失ったことがあります。高価な教訓でした。
- 集中した熱発生。密集したビルドでは、熱の問題を防ぐために適切な空気の流れを確保することを学びました。
- 混合モーターセットアップの柔軟性が低い。これにより、私のより実験的なビルドの一部が制限されました。
最適な用途:
- 配線を最小限に抑えたクリーンなビルド。私のカメラドローンはすべて、可能な限りクリーンなセットアップのために4-in-1 ESCを使用しています。
- 標準的なクアッドコプター構成。私のレーシングおよびフリースタイルクアッドは、現在ほぼ exclusively 4-in-1 ESCを使用しています。
- マッチングフライトコントローラを備えたスタックベースのビルド。最新のFCとESCスタック間の統合は、打ち負かすのが難しいです。
ESCのフォームファクター
標準ESC
従来の個別型ESC:
- サイズ: 一般的に20〜30mm長。ESCが親指サイズだった時代を覚えていますが、今では爪よりも小さいことがよくあります。
- 取り付け: 熱収縮チューブ、ジップタイ、専用マウントなど様々なオプションがあります。私はすべてを試し、最高の振動絶縁のために型取りコーティングでソフトマウントに落ち着きました。
- 接続: 通常、信号用と電源用のリード線があります。抵抗と重量を減らすために、これらをできるだけ短くすることを学びました。

20×20mmスタックESC
フライトコントローラーとスタックするように設計されています:
- サイズ: 20×20mmの取り付けパターン。私は250g未満のビルドのほとんどをこのフォームファクターに切り替えました。
- 取り付け: フライトコントローラーとの標準スタック。振動がパフォーマンスにどれほど影響するかを学んだ後は、スタック層の間に必ずソフトマウントを使用します。
- 接続: 直接はんだ付けパッドまたはリボンケーブル。信頼性のために直接はんだ付けを好みますが、リボンケーブルはメンテナンスを容易にします。

30.5×30.5mmスタックESC
より大きなスタック互換ESC:
- サイズ: 30.5×30.5mmの取り付けパターン。より多くの電力処理が必要なフリースタイルおよび長距離ビルドにこれらを使用します。
- 取り付け: フライトコントローラーとの標準スタック。より大きな取り付けパターンは、大型ビルドでより良い安定性を提供することがわかりました。
- 接続: 直接はんだ付けパッドまたはリボンケーブル。より大きなボードは通常、より太いゲージのワイヤーを扱うときに役立つ、より堅牢な接続ポイントを提供します。
AIO(オールインワン)ソリューション
フライトコントローラーと統合されたESC:
- サイズ: 様々ですが、一般的に20×20mmまたは30.5×30.5mm。マイクロビルドでは専らこれらを使用しています。
- 統合: FCとESCを1枚のボードに組み合わせたもの。当初はこのアプローチに懐疑的でしたが、近年の信頼性は飛躍的に向上しています。
- 接続: 簡素化された内部接続。外部配線の削減により、ビルドの多くの潜在的な故障点が排除されました。

電流定格と仕様
電流処理
ESCが安全に処理できる最大連続電流。激しい飛行中にESCが文字通り溶けるのを見た後、これらの定格には控えめになることを学びました:
- レーシングドローン: モーターあたり35〜50A。私のレースビルドでは、連続で35A以上引くことはほとんどありませんが、通常45AのESCを使用します。ヘッドルームは激しいレース中に安心感を与えてくれます。
- フリースタイルドローン: モーターあたり30〜45A。フリースタイルでは、アグレッシブな機動で限界に挑むときのために、電流のヘッドルームが不可欠だと感じています。
- ロングレンジ/シネマティック: モーターあたり25〜40A。私のロングレンジビルドでは通常35AのESCを使用し、電流処理効率のバランスが良好です。
- マイクロビルド: モーターあたり10〜25A。小型ビルドでも、アグレッシブな飛行中は驚くほどの電流を引くことがあるため、最小のwhoop以外は20A以下にはしません。
バースト定格
短時間の最大電流。これらの定格にあまり頼らないことを学びました:
- 一般的なバースト定格: 連続定格の1.5〜2倍。私のテストでは、多くのESCが宣伝されているバースト定格を実際にはフルの期間維持できないことがわかりました。
- 期間: 通常5〜10秒と指定されています。ベンチテスト中にストップウォッチでこれらのタイミングを測定し、メーカー間で大きなばらつきがあることがわかりました。
- 重要性: スロットルパンチとアグレッシブな機動の処理に不可欠。高品質のMOSFETを搭載したESCは、バジェットオプションよりもバースト電流の処理がはるかに優れていることに気づきました。
BEC(バッテリーエリミネーター回路)
他のコンポーネントに電力を供給するための電圧調整。この機能は最近のビルドではあまり重要ではなくなっています:
- リニアBEC: シンプルで効率が低く、古いESCに見られます。初期のビルドではこれらを使用していましたが、複数の周辺機器に電力を供給するとかなり熱くなることに気づきました。
- スイッチングBEC: より効率的で、最新のESCで一般的。発熱量の減少は、コンパクトなビルドで顕著な違いをもたらします。
- 定格: 一般的に5Vで1〜3A。LEDストリップなどの電力を消費する付属品に電力を供給する場合を除き、2Aで通常は十分だと感じています。
最新のスタックベースのビルドのほとんどは、ESC BECを使用しません。より清浄な電力供給のために、専用のPDBまたは電圧調整機能を内蔵したフライトコントローラーを使用するようになりました。
ESCプロトコルと通信
プロトコルは、フライトコントローラーがESCと通信する方法を決定し、パフォーマンスと機能に影響します。標準PWMから最新の双方向DShotまで、あらゆるプロトコルを使用してきましたが、その進化は目覚ましいものでした。
標準PWM
オリジナルのアナログプロトコル:
- 信号タイプ: パルス幅変調 (50-400Hz)。私は最初のビルドでこれを使い始めましたが、すぐに限界が明らかになりました。
- 解像度: 1000-2000μsの範囲 (約8ビット)。粗いステップは飛行中に顕著で、スロットル応答に「階段」効果を生み出しました。
- レイテンシ: 2-4ms。正確な操作を試みるときは永遠に感じられました。
- 利点: 汎用性。どのESCでもどのフライトコントローラーでも使用できる唯一の本当の利点でした。
- 欠点: 高レイテンシ、低解像度、テレメトリーなし。私の初期のPWMベースのクアッドは、最新のビルドと比べてのろまで不正確に感じられました。
- 現在の使用状況: FPVドローンでは時代遅れ。私は何年もPWMを使っておらず、最新のビルドにはお勧めしません。
OneShot125
初期のデジタルプロトコル:
- 信号タイプ: デジタルタイミング (125-250Hz)。これが私のデジタルプロトコルの最初の経験で、改善は顕著でした。
- 解像度: 125-250μsの範囲 (約10ビット)。スムーズなスロットル応答は飛行感覚に違いをもたらしました。
- レイテンシ: 1-2ms。今日の基準では依然として高いですが、PWMよりは大幅な改善です。
- 利点: 標準PWMより優れている。この切り替えを行ったときに、私のクアッドはより反応が良くなりました。
- 欠点: それでも比較的高いレイテンシ。急激な操作中に遅延を感じることができました。
- 現在の使用状況: 大部分がDShotに取って代わられました。私は何年もOneShotを使っていません。
Multishot
レース用の高速プロトコル:
- 信号タイプ: デジタルタイミング (最大32kHz)。このプロトコルを初めて試したとき、レイテンシの減少はすぐに明らかでした。
- 解像度: 5-25μsの範囲 (約12ビット)。より細かいスロットル解像度により、ホバリングと正確な動きが容易になりました。
- レイテンシ: 0.2-0.5ms。これはレースにとって画期的なことでした。私の入力はほぼ瞬時にモーターの変化に変換されているように感じました。
- 利点: 非常に低いレイテンシ。Multishotを使用した私のレースビルドは、以前のプロトコルでは不可能だったクリスプさを持っていました。
- 欠点: DShotほど信頼性が高くない。私はほとんどのビルドでDShotに切り替えるきっかけとなった時折のグリッチを経験しました。
- 現在の使用状況: ニッチな用途。私はまだMultishotを使用した特殊なレースビルドを1つ持っていますが、最新のクアッドでは珍しいです。
DShot
現在の標準的なデジタルプロトコルファミリー:
- 信号タイプ: デジタルデータパケット。このアプローチの堅牢性により、以前のプロトコルで経験した多くの信頼性の問題が解消されました。
- バリエーション:
- DShot150: 150kbpsのデータレート。処理能力が限られているマイクロビルドでこれを使用しました。
- DShot300: 300kbpsのデータレート。ほとんどのビルドに適したバランス。信号の完全性が不明な場合はこれを使用します。
- DShot600: 600kbpsのデータレート (最も一般的)。限界まで押し上げることなく優れたパフォーマンスを発揮するため、ほとんどのビルドでこれを使用しています。
- DShot1200: 1200kbpsのデータレート。短くクリーンな信号経路を持つ高性能ビルドでこれを使用します。
- 解像度: 16ビット (0-2047の値の範囲)。これにより可能になる微細な制御は驚異的です。以前のプロトコルでは不可能だった微小なスロットル調整ができます。
- レイテンシ: バリエーションに応じて0.2-0.5ms。バック・ツー・バックのテストでは、反応の良いビルドでDShot150とDShot600の違いを感じることができました。
- 利点: デジタルの精度、エラーチェック、コマンド、双方向機能。信頼性の向上だけでも切り替える価値がありました。
- 欠点: 互換性のあるハードウェアが必要。このプロトコルを使用するために、古いESCの一部をアップグレードする必要がありました。
- 現在の使用状況: 最新のビルドの標準。現在、私はほぼすべてのビルドでDShot600を使用しています。
ProShot
DShotの最適化バージョン:
- 信号タイプ: 簡素化されたDShot。このプロトコルをテストしたとき、DShotとの違いは微妙でした。
- データレート: DShot600と同様。私のテストでは、パフォーマンスは同等でした。
- レイテンシ: DShotよりわずかに低い。ほとんどの飛行シナリオでは、その違いをほとんど感じることができませんでした。
- 利点: CPUの負荷が潜在的に低い。この利点は、主に複雑な構成を実行しているF4フライトコントローラーで気づきました。
- 欠点: 採用が限定的。問題が発生したときのトラブルシューティングのリソースが少なかったです。
- 現在の使用状況: まれ。ほとんどがDShotに取って代わられました。私はProShotを試しましたが、最終的にはコミュニティサポートの充実したDShotに戻りました。
双方向DShot
テレメトリー機能を備えた強化版DShot:
- 信号タイプ: 双方向のDShot通信。これを初めて実装したとき、それは啓示でした。突然、フライトコントローラーはモーターが正確に何をしているかを知ることができたのです。
- 機能: フィルタリング用のRPMフィードバックを可能にします。この機能を備えた最初のビルドでは、飛行性能の向上が劇的でした。
- 要件: 互換性のあるESCファームウェアとフライトコントローラー。この機能を活用するために、いくつかのコンポーネントを更新する必要がありました。
- 利点: RPMフィルタリングを可能にし、性能を向上させます。ノイズと振動の減少は、私のブラックボックスログですぐに気づきました。
- 欠点: セットアップがやや複雑。最初の双方向セットアップを正しく動作させるのに数時間を要しました。
- 現在の使用状況: 高性能ビルドでは標準になりつつあります。現在、互換性のあるすべてのビルドでこれを有効にしています。その利点は無視できないほど大きいのです。
プロトコルの比較
複数のビルドでの広範なテストに基づいて、これらのプロトコルを比較すると以下のようになります:
| プロトコル | 解像度 | レイテンシ | エラーチェック | テレメトリー | コマンド | 現在の使用状況 |
|---|---|---|---|---|---|---|
| PWM | 8ビット | 2-4ms | なし | なし | なし | 時代遅れ |
| OneShot125 | 10ビット | 1-2ms | なし | なし | なし | レガシー |
| Multishot | 12ビット | 0.2-0.5ms | なし | なし | なし | ニッチ |
| DShot150 | 16ビット | ~0.5ms | あり | オプション | あり | エントリーレベル |
| DShot300 | 16ビット | ~0.3ms | あり | オプション | あり | 一般的 |
| DShot600 | 16ビット | ~0.2ms | あり | オプション | あり | 標準 |
| DShot1200 | 16ビット | ~0.1ms | あり | オプション | あり | ハイエンド |
| ProShot | 16ビット | ~0.2ms | あり | オプション | あり | まれ |
ESCファームウェアのオプション
ファームウェアは、ESCのマイクロプロセッサ上で動作するソフトウェアであり、その機能と動作を決定します。私はすべての主要なファームウェアオプションを試してみましたが、それぞれに長所と短所があります。
BLHeli_S
私が広く使用している人気の8ビットファームウェア:
- ハードウェアの互換性: 8ビットESC。初期のビルドではこれらから始め、今でも特定の用途で使用しています。
- 機能: 基本的なモーター制御、限定的な設定。32ビットオプションほど機能は豊富ではありませんが、基本的な機能は十分にこなせると感じています。
- パフォーマンス: 初級から中級レベルのビルドに適しています。BLHeli_S ESCを使用した数十機のクアッドを製作しましたが、フリースタイルやカジュアルなレースで美しく飛行します。
- 設定: BLHeli Configuratorソフトウェア。シンプルなインターフェースが気に入っていますが、一部の高度なオプションは不足しています。
- 利点: 広くサポートされており、信頼性が高い。非常に信頼できると感じています。古いビルドの一部は今でもBLHeli_Sを問題なく実行しています。
- 欠点: 32ビットオプションと比較して機能が限定的。パフォーマンスの限界に挑戦する際には、これらの限界に直面しました。
BLHeli_32
私のビルドを一変させた先進的な32ビットファームウェア:
- ハードウェアの互換性: 32ビットESC。BLHeli_32ハードウェアが利用可能になったとき、すべての主要クアッドをアップグレードしました。
- 機能: 広範な設定、テレメトリー、LED制御。テレメトリーデータにアクセスした最初のとき、飛行中のビルドの監視方法が変わりました。
- パフォーマンス: あらゆる用途に最適。小型のウープから長距離クルーザーまで、常に印象的な結果が得られました。
- 設定: BLHeli_32 Configuratorソフトウェア。インターフェースはBLHeli_Sよりも包括的で、必要だと知らなかった設定にアクセスできるようになりました。
- 利点: 機能が豊富で、高性能。アップグレードした際の違いはすぐに分かりました。モーター制御がスムーズになり、ブレーキが改善され、スロットル応答がより正確になりました。
- 欠点: プロプライエタリで、メーカーにはライセンス料が必要。これにより、イノベーションが制限され、価格が高止まりしています。
AM32
BLHeli_32のオープンソース代替として、私が採用を増やしているファームウェア:
- ハードウェアの互換性: 32ビットESC。複数のブランドの32ビットESCにこれを正常にフラッシュしました。
- 機能: BLHeli_32と同様、コミュニティ主導。ユーザーのフィードバックに基づいて新機能が迅速に実装されることに感銘を受けました。
- パフォーマンス: BLHeli_32に匹敵。BLHeli_32とAM32を使用した同一ビルドでのバック・ツー・バックテストでは、飛行感覚の違いは分かりませんでした。
- 設定: AM32 ConfiguratorまたはJESC Configurator。インターフェースはそれほど洗練されていませんが、効果的に機能します。
- 利点: オープンソース、無料、活発な開発。コミュニティの側面と急速な改善のペースを評価しています。
- 欠点: サポートがあまり広くない。より確立されたオプションと比較して、問題のトラブルシューティングにはより多くの調査が必要でした。
JESC
BLHeli_Sをベースにした拡張ファームウェアで、古いハードウェアに新たな命を吹き込みました:
- ハードウェアの互換性: BLHeli_S ESC。これを使って、ESCを交換せずに古いビルドをいくつかアップグレードしました。
- 特徴: 48kHz PWM、パフォーマンスの向上。PWM周波数を高くすることで、フリースタイルビルドのモーターの滑らかさに顕著な違いが見られました。
- パフォーマンス: 標準のBLHeli_Sよりも優れています。主張を試すまでは懐疑的でしたが、反応性と滑らかさの改善は間違いなくアップグレードに値するものでした。
- 設定: JESC Configurator。インターフェースはBLHeli_S Configuratorに似ているため、移行が容易です。
- 利点: 既存のハードウェアのパフォーマンスを向上させます。ESCを交換するのではなくファームウェアをアップグレードすることで、何百ドルも節約できました。
- 欠点: 有料ライセンスが必要。高くはありませんが、無料のオプションがある中でファームウェアに対価を払うことには最初は抵抗がありました。試してみて、お金をかける価値は十分にあると考えています。
Bluejay
最近実験しているBLHeli_Sハードウェア用のオープンソースファームウェア:
- ハードウェアの互換性: BLHeli_S ESC。私の古いESCのいくつかにこれを正常にフラッシュしました。
- 特徴: パフォーマンスの向上、オープンな開発。特に、スタートアップ時の出力制御の改善を評価しており、標準ファームウェアで時折経験していた引っかかりがなくなりました。
- パフォーマンス: 標準のBLHeli_Sよりも優れています。私のテストでは、ライセンス料なしでJESCとほぼ同等のパフォーマンスを発揮しています。
- 設定: Bluejay Configurator。インターフェースはシンプルで、他のコンフィギュレーターにはない独自の機能が含まれています。
- 利点: 無料、オープンソース。特にこれほどのパフォーマンスを発揮するコミュニティ主導のプロジェクトを支援するのが大好きです。
- 欠点: ハードウェアの互換性が限られています。互換性のないESCがいくつかあり、ビルド間で標準化しようとしたときにイライラしました。

ファームウェア機能比較
複数のビルドでの広範なテストに基づいて、これらのファームウェアオプションを比較すると以下のようになります:
| 機能 | BLHeli_S | BLHeli_32 | AM32 | JESC | Bluejay |
|---|---|---|---|---|---|
| ハードウェア | 8ビット | 32ビット | 32ビット | 8ビット | 8ビット |
| PWM周波数 | 24kHz | 16-48kHz | 24-48kHz | 48kHz | 24-48kHz |
| 双方向DShot | 限定的 | あり | あり | あり | あり |
| テレメトリー | なし | あり | あり | 限定的 | 限定的 |
| スタートアップ出力 | 調整可能 | 調整可能 | 調整可能 | 調整可能 | 調整可能 |
| ブレーキ | 限定的 | 高度 | 高度 | 改善 | 改善 |
| 設定性 | 中程度 | 広範 | 広範 | 中程度 | 中程度 |
| コスト | 無料 | 無料(ユーザー) | 無料 | 有料 | 無料 |
| 開発 | クローズド | クローズド | オープン | クローズド | オープン |
適切なファームウェアの選択は、特定のニーズとハードウェアに大きく依存することがわかりました。ハイパフォーマンスビルドには、BLHeli_32またはAM32を専ら使用しています。予算の制約があるビルドや古いハードウェアを再利用する場合は、Bluejayが私のお気に入りのオプションになりました。
適切なESCの選択
適切なESCの選択は、特定のニーズとビルドの要件に依存します。さまざまな目的で何百ものドローンを製作した後、私はさまざまな用途に対して強い好みを持つようになりました。
レーシングドローン用
優先事項: パフォーマンス、信頼性、応答性—レースではミリ秒単位が重要です。
推奨される機能:
- 電流定格: モーターあたり35〜50A。ほとんどのレースビルドでは、45Aがパフォーマンスと信頼性の完璧なバランスを提供することがわかりました。
- プロトコル: DShot600以上。レースではこれ以下は考えられません—応答性の違いは顕著です。
- ファームウェア: BLHeli_32またはAM32。どちらでもレースに勝っており、パフォーマンスは同等です。
- 構成: クリーンなビルドのための4-in-1。私のレースクワッドはすべて、重量削減と配線の簡素化のために4-in-1 ESCで構築されています。
- 機能: RPMフィルタリングのための双方向DShot。これは私のレースビルドにとってゲームチェンジャーでした—フィルタリングの改善により、発振なしでより高いPID値を実行できます。
例:
- Hobbywing XRotor 60A 4-in-1。本格的なレースビルドのために私のお気に入りです—揺るぎない信頼性と優れたパフォーマンス。
- T-Motor F55A Pro II。長時間のレーシングセッション中のこれらのESCの熱性能に感銘を受けました。
- Aikon TEKKO32 F4 50A。優れたコストパフォーマンスを発揮し、私の表彰台に上がったビルドのいくつかに電力を供給しています。
フリースタイルドローン用
優先事項: 信頼性、滑らかなパフォーマンス、耐久性—フリースタイルはコンポーネントにユニークなストレスをかけます。
推奨される機能:
- 定格電流: モーターあたり30-45A。私は、ほとんどのフリースタイルビルドでは40Aがちょうどいいと考えています。余裕を持たせつつ、過剰な重量を避けられます。
- プロトコル: DShot300またはDShot600。私は現在、すべてのフリースタイルビルドでDShot600を使用しています。解像度の向上は、正確なマニューバーで顕著に感じられます。
- ファームウェア: BLHeli_32またはAM32。これらのファームウェアの高度なブレーキ機能は、フリースタイルの操縦性に大きな違いをもたらします。
- 構成: 好みに応じて4-in-1または個別。私はほとんどのフリースタイルビルドを4-in-1 ESCに切り替えましたが、修理性を重視するビルドでは今でも個別のESCを使用しています。
- 機能: バッテリー管理のためのテレメトリー。これにより、長時間のフリースタイルセッションでバッテリーへのダメージを数え切れないほど防ぐことができました。
例:
- HGLRC Forward 45A 4-in-1。私はこれらを1年以上メインのフリースタイルビルドで使用していますが、素晴らしい結果を得ています。
- Spedix GS45A。これらは私のビルドで壮観なクラッシュにも耐えてきました。耐久性は印象的です。
- Diatone Mamba F40 40A。お手頃価格のオプションで、いくつかのミッドレンジのフリースタイルビルドで大成功を収めています。
ロングレンジ/シネマティックドローン用
優先事項: 効率、信頼性、スムーズな動作。自宅から離れた場所を飛行する際に、これらのビルドは信頼できる必要があります。
推奨される機能:
- 定格電流: モーターあたり25-40A。私の経験では、35Aでほとんどのロングレンジセットアップに十分な余裕があり、不必要な重量を加えることはありません。
- プロトコル: DShot300またはDShot600。ロングレンジビルドにはDShot300を好んで使用します。十分に応答性が高く、長い信号経路でもより信頼性が高い可能性があります。
- ファームウェア: BLHeli_32またはAM32。長時間のフライト中にシステムの健全性を監視するには、テレメトリー機能が不可欠です。
- 構成: 冗長性のために個別のESC。
- 機能: テレメトリー、温度監視。長時間のフライト中にコンポーネントに過度の負荷をかけていないことを確認するために、これらの機能に大きく依存しています。
例:
- T-Motor F35A。私のロングレンジビルドで非常に信頼性が高いことが証明されています。何百キロもの距離を記録してきました。
- Aikon TEKKO32 35A。これらのESCの効率は印象的で、ロングレンジクルーザーのフライト時間を延ばすのに役立っています。
- Holybro Tekko32 35A。これらが提供する包括的なテレメトリーデータを高く評価しており、遠距離飛行中に自信を与えてくれます。
マイクロビルド用
優先事項: サイズ、重量、統合性。これらの小さなビルドでは、1グラムと1ミリメートルがとても重要です。
推奨される機能:
- 定格電流: モーターあたり10-25A。私の経験では、パフォーマンスを追求する場合でも、ほとんどのマイクロビルドに20Aが適度なバランスを提供します。
- プロトコル: DShot300またはDShot600。可能な限りDShot600を使用しますが、ほとんどのマイクロアプリケーションではDShot300で十分です。
- ファームウェア: BLHeli_SまたはBLHeli_32。最小のビルドにはコストと重量の考慮からBLHeli_Sを使用することが多いですが、パフォーマンスがより重要な3インチビルドにはBLHeli_32を使用します。
- 構成: AIOまたは4-in-1。最小のビルドではFCとESCを組み合わせたAIOボードを使用し、3インチビルドでは通常、別々のFCと4-in-1 ESCスタックを使用します。
- サイズ: 20×20mm以下。最小のビルド用に16×16mmのESCがどれほど高性能になったかに驚かされます。
例:
- HGLRC Zeus 20A 4-in-1。これらは私のいくつかの3インチビルドに電力を供給し、そのサイズの割に優れたパフォーマンスを発揮しています。
- Happymodel 12A 4-in-1。歯ブラシビルド用の定番。軽量でありながら驚くほど高性能。
- BetaFPV F4 2-4S AIO。これらのボードでいくつかのマイクロフープを製作しましたが、パフォーマンスと重量のバランスに感銘を受けました。
初心者向け
優先事項: 信頼性、価値、使いやすさ。最初のビルド体験はできるだけスムーズであるべきです。
推奨される機能:
- 定格電流: モーターあたり30-40A(余裕を持たせる)。私は初心者には、必要だと思うよりも多くの余裕を持つことを常にお勧めしています。学習プロセスでのイライラするような失敗を防ぐことができます。
- プロトコル: DShot300またはDShot600。初心者にはDShot300をお勧めします。十分に高速で、信号の完全性の問題にも寛容である可能性があります。
- ファームウェア: BLHeli_SまたはBLHeli_32。最初のビルドには設定が簡単なBLHeli_Sを、スキルが上達してきたらBLHeli_32をお勧めしています。
- 構成: 配線を簡単にするための4-in-1。配線の複雑さを減らすことは、初めてビルドする人にとって大きな違いをもたらします。私は数十人の初心者の最初のビルドを手伝ってきましたが、4-in-1 ESCは大幅にフラストレーションを軽減します。
- 機能: 複雑すぎない基本的なもの。初心者には標準的な機能から始めて、経験を積むにつれて複雑さを加えることをアドバイスしています。
例:
- iFlight SucceX-E 45A 4-in-1。多くの初心者にこれらを推奨してきましたが、フィードバックは一貫して肯定的でした。信頼性が高く、わかりやすいです。
- HAKRC 35A 4-in-1。優れた価値を提供し、私が手伝った初心者のビルドで信頼性が証明されています。
- Racerstar REV35 35A。予算が最優先の場合、これらは非常に手頃な価格で許容できるパフォーマンスを提供します。
ESCの取り付けとセットアップ
適切な取り付けと設定は、最適なパフォーマンスと信頼性のために非常に重要です。私は何百ものビルドを通じて、多くのことを苦労して学びました。
ハードウェアのインストール
取り付けに関する考慮事項
- 位置: 適切な冷却のための位置決め。ESCをプロップウォッシュの経路に取り付けると、熱性能が大幅に向上することがわかりました。ESCの位置を変えるだけで、15°Cの差を測定したことがあります。
- 振動: 振動による損傷を防ぐため、しっかりと取り付けます。振動によるはんだ疲労でESCを失ってから、すべてのESCにソフトマウントを使用するようになりました。
- 保護: 可能な限り、クラッシュによる損傷から保護します。直接の衝撃で損傷した複数のESCを経験した後、可能な限りフレーム内にESCを配置するようにしています。
- アクセシビリティ: メンテナンスのためのアクセスを考慮します。ESCにアクセスするためにほぼ完全に分解する必要があるクアッドを作ったことがありますが、二度とそんなことはしません!
- 熱管理: 冷却のための空気の流れを確保します。コンポーネント間に十分なスペースを確保し、ESCへの空気の流れを妨げないようにしています。
配線のベストプラクティス
- 電源配線: 電流に適したゲージのワイヤーを使用します。これは、細すぎる配線の結果を経験した後、私が妥協しない領域の1つです。
- マイクロビルドには20〜22AWGを使用。10Aを超える可能性のあるものには20AWGを使用します。
- 標準的なビルドには18AWGを使用。これは、4Sまたは6Sを使用する5インチクアッドの標準です。
- 高電流アプリケーションには16AWGを使用。バッテリーリードに使用し、高性能6Sビルドのモーターワイヤーにも使用することがあります。
- 信号配線: 干渉を減らすため、電源ワイヤーから離します。可能な限り、スタックの反対側に信号ワイヤーを配線するようにしています。
- モーター配線: バランスの取れたパフォーマンスのために、同じ長さのワイヤーを使用します。モーターワイヤーを同じ長さに測定してカットします。これは、スムーズな飛行特性に貢献する小さな詳細です。
- コンデンサ: 電源入力の近くに適切なサイズのコンデンサを取り付けます。電気ノイズが飛行性能にどれほど影響するかを学んだ後、すべてのビルドに低ESRコンデンサを追加しています。
- 絶縁: すべての接続を適切に絶縁します。ショートによって高価なビルドが終わった後、ヒートシュリンクを自由に使用し、露出した電子機器にはコンフォーマルコーティングを施しています。
配線の詳細については、以下を参照してください:
ドローン配線ガイド
ソフトウェア設定
BLHeli_S設定
何百ものESCを設定した後、私は体系的なアプローチを開発しました:
- ESCの接続: フライトコントローラーのパススルーまたは専用プログラマー経由。利便性のためにパススルーを好みますが、トラブルシューティング用にフィールドキットに専用プログラマーを用意しています。
- 基本設定:
- モーターの回転方向: 通常または逆回転。プロップを取り付ける前に、必ずクイックテストスピンでモーターの回転方向を確認します。これは、恥ずかしい離陸事故から学んだ教訓です。
- PWM周波数: 標準の24kHz、スムーズな動作のために48kHz。わずかな効率の低下にもかかわらず、スムーズなモーターフィールのために、すべてのフリースタイルビルドで48kHzを使用しています。
- スタートアップパワー: モーターのサイズとプロップに基づいて調整します。重いビルドほどスタートアップパワーを高くする必要があることがわかりました。通常、5インチクアッドには0.75〜1.00、マイクロには0.5〜0.75を使用します。
- タイミング: ほとんどのアプリケーションでは中〜高。効率のためにMedium(22.5°)、最大性能のためにHigh(30°)を使用します。ビルドの目的に応じて使い分けています。
- Demagコンペンセーション: ほとんどのセットアップでは中〜高。飛行中のデシンクのフラストレーションを経験した後、どのビルドでもMedium未満にはしません。
- 高度な設定:
- Brake On Stop: アクティブブレーキのために有効にします。フリースタイルビルドではクリスパーストップのためにこれを有効にしますが、ロングレンジビルドでは効率のために無効にします。
- 低電圧保護: バッテリータイプに基づいて設定します。高価なLiPoパックを何個か台無しにした後、これは控えめに設定しています。
- 電流保護: 適切な制限を設定します。通常、通常動作時に予想される電流の約20%上に設定します。
BLHeli_32設定
BLHeli_32の追加オプションには、より慎重な検討が必要です:
- ESCの接続: フライトコントローラーのパススルーまたはUSBリンク経由。多くのBLHeli_32 ESCに搭載されているUSB直接接続は、私が非常に高く評価するようになった機能です。
- 基本設定:
- モーターの回転方向: 通常または逆回転。BLHeli_Sと同様に、プロップを取り付ける前に必ずテストします。
- PWM周波数: 好みに基づいて24〜48kHz。フリースタイルには48kHz、効率が滑らかさより重要なロングレンジビルドには24kHzを使用します。
- ランプアップパワー: スムーズなスタートのために調整します。25%がほとんどのビルドでうまく機能することがわかりましたが、重いシネマティックリグでは35〜40%が必要になる場合があります。
- タイミング: ほとんどのアプリケーションでは22〜25°。広範なテストの結果、これ以上の範囲ではリターンが減少することがわかったため、めったにこの範囲から外れることはありません。
- 高度な設定:
- ブレーキタイプ: オフ、ストップ、またはブレーキ。フリースタイルビルドにはブレーキを使用し、その他のほとんどにはストップを使用します。
- Demagコンペンセーション: デシンク防止のために調整します。高KVモーターにはHighが最適で、低KVセットアップにはMediumで十分であることがわかりました。
- 双方向DShot: RPMフィルタリングのために有効にします。これをサポートするすべてのビルドでこれを有効にします。飛行性能の向上は大幅です。
- 温度保護: 制限を設定します。さまざまな条件下で熱性能を測定した後、警告を85°C、クリティカルを100°Cに設定しています。
- 低電圧保護: 適切なカットオフを設定します。バッテリータイプに基づいて設定します。標準LiPoは1セルあたり3.3V、Li-ionは3.0Vです。
- 追加機能:
- LEDコントロール: RGBLEDが存在する場合は設定します。空中で簡単に識別できるように、クアッドごとに異なる色を使用します。
- テレメトリー: 有効にして設定します。貴重な飛行中のデータを得るために、これは常に有効にしています。
- スロットルキャリブレーション: デジタルプロトコルでは通常不要です。DShotを使用する場合はこの手順をスキップしますが、アナログプロトコルを使用する場合は実行します。
AM32設定
BLHeli_32と似ていますが、いくつかの違いがあります:
- ESC の接続: コンフィギュレーター経由。インターフェースは異なりますが、同じ目的を達成します。
- 基本設定:
- モーター回転方向: 通常または逆回転。他のファームウェアと同じテスト手順。
- PWM 周波数: 24-48kHz。私のテストでは、AM32 は 48kHz で BLHeli_32 よりわずかに低温で動作することがわかりました。
- 始動出力: モーターサイズに基づいて調整。私の経験では、AM32 は BLHeli_32 と比較して、わずかに高い始動出力値が必要なようです。通常、5〜10% 増やします。
- 詳細設定:
- コミュテーションタイミング: モータータイミングに類似。BLHeli_32 と同じ原則を使用します。
- 双方向 DShot: RPM フィルタリングを有効にします。私のテストでは、BLHeli_32 と同様にうまく機能します。
- ブレーキタイプ: 必要に応じて設定。同様のビルドでは、BLHeli_32 と同じ設定を使用します。
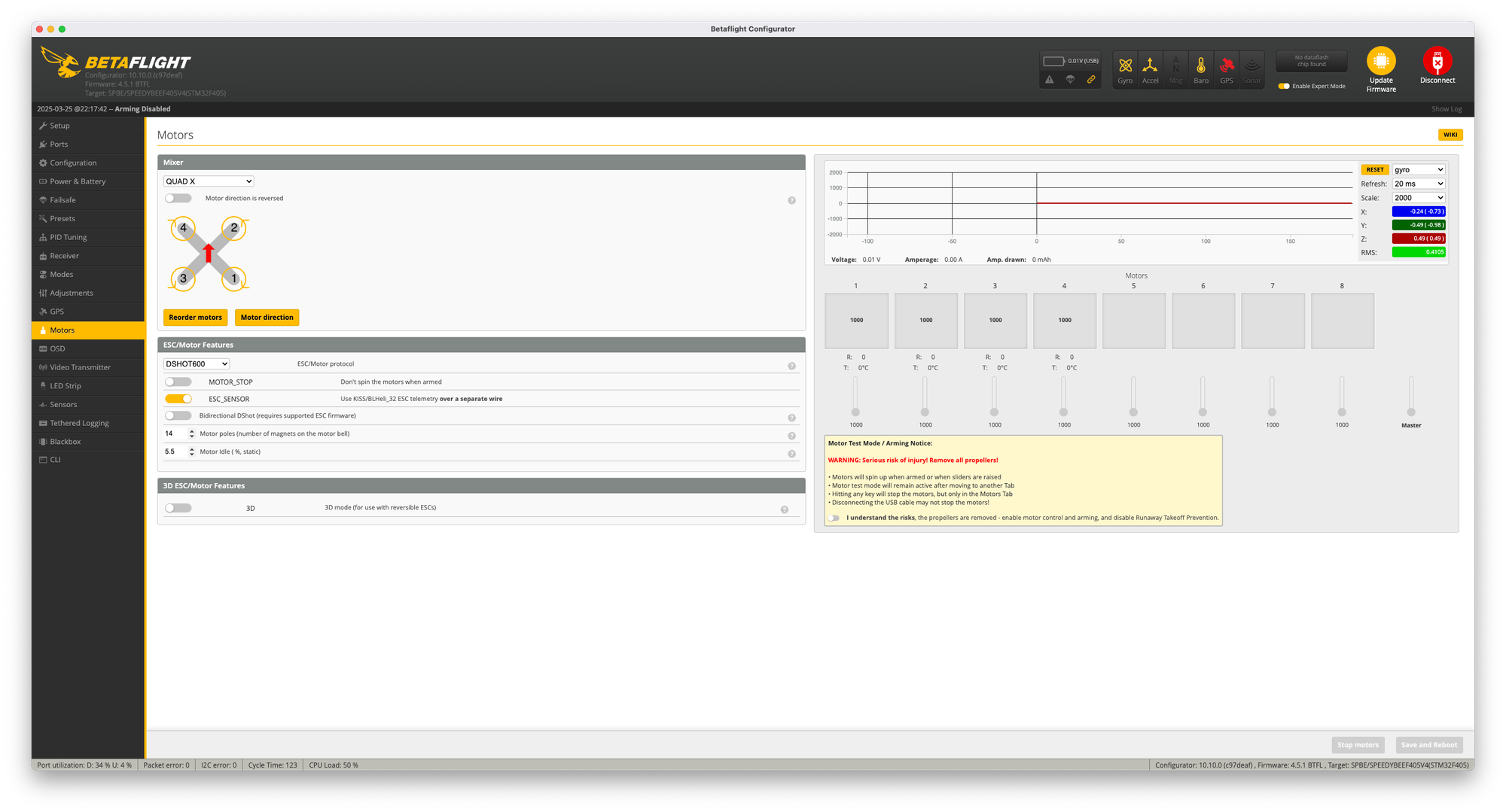
Betaflight でのプロトコル設定
Betaflight で数え切れないほどのビルドをセットアップした後、私は体系的なアプローチを開発しました:
- プロトコルの選択: 設定タブで
- ほとんどのアプリケーションでは DShot600 を選択します。これは事実上すべてのビルドで私の標準プロトコルになりました。
- サポートされている場合は、双方向 DShot を有効にします。可能な限りこれを有効にします。フィルタリングのメリットは大きいです。
モーター出力設定
Betaflight でのプロトコル設定
Betaflight で数え切れないほどのビルドをセットアップした後、私は体系的なアプローチを開発しました:
- プロトコルの選択: 設定タブで
- ほとんどのアプリケーションでは DShot600 を選択します。これは事実上すべてのビルドで私の標準プロトコルになりました。
- サポートされている場合は、双方向 DShot を有効にします。可能な限りこれを有効にします。フィルタリングのメリットは大きいです。
- モーター出力設定:
- モーターの順序と回転方向を確認します。初飛行前にプロペラを外して必ず行います。無数のクラッシュから救われました。
- 非標準ピンを使用する場合はリソースを設定します。パッドが損傷したビルドや、追加機能を追加する際に行ったことがあります。
- RPM フィルタリング (双方向 DShot を使用する場合):
- 設定タブで RPM フィルタリングを有効にします。これは私のビルドにとって画期的でした。飛行性能の向上は著しいです。
- モータータブで RPM テレメトリーが機能していることを確認します。モーターを手動で回転させ、RPM 値が更新されるのを見て、必ず確認します。
一般的なセットアップの問題と解決策
長年にわたり、私は数え切れないほどのセットアップの問題に遭遇し、解決してきました。最も一般的な問題とその解決策を以下に示します:
モーターが間違った方向に回転する
考えられる原因:
- ESC ソフトウェアでの設定ミス。私は認めたくないほど何度もこの間違いをしました。
- モーター配線の間違い。修正は簡単ですが、再はんだ付けが必要です。
解決策:
- BLHeli コンフィギュレーターで回転方向を変更。これが私の好ましい解決策です。はんだ付けは不要です。
- 任意の2本のモーター配線を入れ替える。コンフィギュレーターにアクセスできない場合や、BLHeli 以外の ESC を扱う場合に、このアプローチを使用します。
ESC が検出されない
考えられる原因:
- 通信の問題。はんだ付け不良から UART の割り当て間違いまで、あらゆるものが原因でした。
- ファームウェアの間違い。時々、互換性のないファームウェアバージョンを書き込んで、通信エラーが発生したことがあります。
- 電源の問題。電圧不足で初期化できない ESC がありました。
解決策:
- 配線接続を確認する。配線の問題が疑われる場合は、必ずマルチメーターで導通をチェックします。
- 互換性のあるファームウェアバージョンを確認する。どのファームウェアバージョンがどのハードウェアで動作するかをメモしておきます。
- ESC への適切な電力供給を確保する。特にベンチテストで電源を使用する際、一部の ESC は初期化に最小電圧を必要とすることがわかりました。
ESC の高度なトピック
セットアップを最適化したい経験豊富なパイロットのために、これらの高度な概念がより深い洞察を提供します。私はビルドを最大限に活用するために、何年もこれらの分野を探求してきました。
ESC のチューニングと最適化
PWM 周波数の調整
ESC がモーターに電力を切り替える周波数。新しいビルドを最適化する際、最初に調整する設定の1つです:
- 高周波数 (32-48kHz):
- より滑らかな動作。飛行中の違いを感じることができます。特にホバリングの精度で顕著です。
- モーターノイズの低減。24kHz から 48kHz に上げると、モーターノイズが 3-5dB 減少しました。
- 潜在的にはより効率的。ここでは混在した結果が出ています。一部のセットアップでは効率が若干向上し、他では変化がありません。
- ESC の発熱増加。高周波数で動作させると、5-10°C の温度上昇を測定しました。
- 低周波数 (16-24kHz):
- より高いトルク。重量物運搬ビルドでは、滑らかさよりも最大推力が重要な場合、低周波数を使用します。
- ESC の発熱減少。冷却が制限されるコンパクトなビルドで特に重要だと感じました。
- ESC の寿命が潜在的に長くなる可能性。高周波数で複数の ESC を焼き切った後、長持ちさせたいビルドでは低周波数を使用するようになりました。
- モーターノイズの増加。違いは顕著で、24kHz のビルドは 48kHz のビルドとは明らかに音が異なります。
モータータイミング設定
磁界の関係に影響します。私はタイミング設定を広範囲に実験し、パフォーマンスに大きな影響を与えることがわかりました:
- 低タイミング (0-10°):
- より効率的。ロングレンジビルドでは、低タイミング設定で最大15%長いフライト時間を計測しました。
- パワーが低い。高タイミングと比較して、最大推力が通常5-10%低下することに気づきました。
- 高KVモーターに適しています。温度を管理しやすくするために、すべての高KVレースモーターで低タイミングを使用しています。
- より冷却された動作。高タイミング設定と比較して、10-15°Cの温度低下を記録しました。
- 中タイミング (15-25°):
- バランスのとれたパフォーマンス。これはほとんどのビルドで私のデフォルトの範囲であり、パワーと効率のよい妥協点です。
- ほとんどのセットアップの標準。典型的なフリースタイルやレーシングビルドでは、この範囲から外れることはほとんどありません。
- 良好な効率とパワーのバランス。この範囲は、高タイミングのパワーの90%を、はるかに優れた効率で提供することがわかりました。
- 高タイミング (25-30°):
- 最大パワー。すべてのグラムの推力が重要な競技用レースビルドにこの設定を使用します。
- 効率が低い。低タイミング設定と比較して、10-20%のフライト時間の短縮を計測しました。
- 低KVモーターに適しています。低KVモーター(2000KV未満)は、高タイミングの恩恵を受けることがよくあります。
- より高温な動作。高タイミングでは15-20°Cの温度上昇を記録しました。適切な冷却が不可欠です。
デマグ補償
モーターの非同期を防ぐのに役立ちます。飛行中の非同期の不満を経験した後、私はこの設定に非常に精通するようになりました:
- 低: 最小限の介入で、高品質のモーターに適しています。この設定は、理想的な条件下でのプレミアムモーターでのみ使用します。
- 中: ほとんどのセットアップの標準設定。これはほとんどのビルドでのデフォルトであり、パフォーマンスと信頼性のバランスがとれています。
- 高: 最大限の保護で、問題のあるセットアップに適しています。水上での特に怖い非同期事故の後、私は現在、すべてのロングレンジビルドでこの設定を使用しています。
- 効果: 設定を高くすると最大パワーは減少しますが、信頼性は向上します。低から高に変更すると、最大推力が約5%減少しましたが、ほとんどのアプリケーションでは信頼性の向上に値します。
スタートアップパワーとランプアップ
モーターの始動時の動作の激しさを制御します。この設定は、確実な離陸に特に重要であることがわかりました:
- 高い値: より速いスタートアップで、重いビルドに適しています。重いカメラを搭載したシネマティックリグでは、0.75-1.00の値を使用します。
- 低い値: より穏やかなスタートアップで、軽量ビルドに適しています。マイクロクアッドでは通常、スムーズで制御されたスタートのために0.25-0.50を使用します。
- 考慮事項: 高すぎるとモーターを損傷し、低すぎるとスタートアップに失敗する可能性があります。過剰なスタートアップパワーでモーターを焼損させた後、逆に少なすぎるとクアッドが離陸に失敗するという教訓を、私は苦い思いで学びました。
ESCテレメトリーとモニタリング
最新のESCは貴重なデータを提供できます。この機能は、ビルドの監視と保守の方法を変革しました:
電流モニタリング
- リアルタイム電流: 瞬間的な電力消費。これを使用して、飛行中にシステムにどれだけ負荷をかけているかを判断します。
- ピーク電流: 観測された最大電流。飛行後にこれをチェックして、ESCの能力を超えていないことを確認します。
- 平均電流: バッテリー計算に役立ちます。これを使用して、電圧だけよりも正確に残りのフライト時間を見積もります。
- 実装: 電流センサーとテレメトリーサポートが必要です。専用の電流センサーは通常、ESCに内蔵されているものよりも正確であることがわかりました。
温度モニタリング
- ESC温度: 熱損傷を防ぐために重要です。温度を監視し、高温になりすぎたら着陸することで、何度かESCを破壊から救いました。
- 警告しきい値: 通常は80-90°Cです。慎重さと実用性のバランスがよいことがわかったため、85°Cで警告を表示するようOSDを設定しています。
- クリティカルしきい値: 通常は100-110°Cです。105°Cを超えるとMOSFETの故障率が劇的に増加することを計測したため、クリティカルカットオフを100°Cに設定しています。
- 保護: 自動スロットル制限またはシャットダウン。完全なシャットダウンよりもスロットル制限を好みます。ESCが飛行中に過熱したときにクラッシュを防いでくれました。
RPMフィードバック
- モーターRPM: 実際の回転速度。RPMがどれほど高くなるかに驚きました。レースビルドの中には30,000RPMを超えるものもあります。
- 用途: RPMフィルタリング、パフォーマンス分析。フィルタリング機能はビルドに革命をもたらしました。以前は除去が不可能だったプロップウォッシュの振動が、今では完全に消えました。
- 要件: 双方向DShotまたは専用テレメトリーワイヤー。現在は双方向DShotのみを使用しています。実装が簡単で、同じように機能します。
- 利点: フライトコントローラーのフィルタリングが改善され、よりスムーズな飛行が可能になります。その違いは劇的です。振動なしでPID値をはるかに高く設定でき、その結果、はるかに応答性の高いクアッドになります。
ESCファームウェアの書き込みとアップデート
ESCを最新の状態に保つか、ファームウェアを変更します。私は何百ものESCを書き換えてきて、その過程でいくつかの重要な教訓を学びました:
BLHeli_SからBLHeli_32への変換
ハードウェアの違いにより物理的に不可能です。これは、BLHeli_32を古いハードウェアに書き込もうとして失敗した後に学んだ教訓です:
- BLHeli_Sは8ビットプロセッサーを使用します。損傷したESCを開いて、これらのチップを調べました。物理的に異なります。
- BLHeli_32には32ビットプロセッサーが必要です。これらのより強力なプロセッサーは高度な機能を可能にしますが、下位互換性はありません。
- ハードウェアを交換する以外のアップグレード方法はありません。BLHeli_SからBLHeli_32にアップグレードする際には、ESCスタック全体を交換する必要がありました。
BLHeli_SからJESC/Bluejayへの変換
互換性のあるハードウェアで可能です。私は何十ものESCをこれらの代替ファームウェアに変換してきました:
- 最初にオリジナルのファームウェアをバックアップします。ESCをブリックしてしまい、復元する方法がなかった時に、この教訓を身をもって学びました。
- 適切なコンフィギュレーターソフトウェアを使用します。バージョンの競合を避けるために、各コンフィギュレーターを別々にインストールしています。
- 具体的な書き込み手順に従います。ESCのモデルによって、プロセスが少しずつ異なることがわかりました。
- 潜在的なリスクを認識しておきます。代替ファームウェアを書き込む際、約5%の割合で失敗しています。常にスペアを用意しておくことが大切です。
ファームウェアアップデートのベストプラクティス
- 現在の設定をバックアップ: アップデート前に必ず行います。アップデート前には、すべての設定のスクリーンショットとCLIダンプを保存しています。
- リリースノートを読む: 変更点を理解します。アップデートで予期せぬ動作変更に遭遇したことがあります。今では常に完全なリリースノートを読むようにしています。
- ESCを1つずつ: 個別のESCの場合。アップデート中に4-in-1ボード全体をブリックしてしまったことがあるので、可能な限り個別のESCを1つずつアップデートするようにしています。
- 安定した電源: 電源が途切れないようにします。アップデート中にバッテリーが外れてESCを失ってしまったことがあるので、ファームウェアのアップデートには専用の電源を使用しています。
- リカバリーオプション: アップデートに失敗した場合の計画を立てます。ブリックしたESCを復旧するために、ツールキットにハードウェアプログラマーを常備しています。
ESCのカスタム機能
最新のESCに搭載されている高度な機能。これらの機能は進化とともに、ますます便利になってきていると感じています:
LEDコントロール
- RGB LED: 一部のESCに内蔵。ナイトフライト用のビルドにはすべてこれを使用し、機体の向きを把握しています。
- プログラマブルなパターン: コンフィギュレーターを通じて設定。クアッドごとに異なるパターンを割り当て、空中で簡単に識別できるようにしています。
- ステータス表示: ESCの状態を視覚的にフィードバック。アーミングステータス、警告、エラーごとに異なる色を表示するように設定しています。
- 考慮事項: 消費電力は少なく、見た目のメリットがあります。フル輝度のLEDの消費電力は約0.5Wと測定しました。ほとんどのビルドでは無視できる量ですが、ロングレンジセットアップでは考慮に値します。
サウンドとトーン
- スタートアップトーン: 初期化の聴覚的な確認。適切なスタートアップシーケンスを確認するために、これらのトーンに頼るようになりました。
- 警告ビープ音: 様々な状態の警告。低電圧警告のおかげで、多くのバッテリーを過放電から守ることができました。
- ミュージックモード: 一部のESCは簡単な曲を再生できます。クアッドごとに異なる曲を設定しています。ビルドをパーソナライズする楽しい方法です。
- カスタマイズ: 一部のファームウェアで可能。自分のイニシャルをモールス信号で再生するカスタムスタートアップシーケンスを作成しました。自分のビルドのシグネチャーです。
特殊なモード
- 3Dモード: モーターの回転方向を瞬時に反転できます。逆さまにホバリングできる専用の3Dクアッドを作りました。まったく異なるフライト体験です。
- タートルモード: 墜落したドローンを高トルクでひっくり返します。この機能のおかげで、墜落したクアッドを回収するための歩行を無数に省くことができました。今では不可欠だと考えています。
- ブレーキ力調整: アクティブブレーキの動作をカスタマイズします。素早い停止が重要なフリースタイルビルドにはより強いブレーキを、シネマティックな作品にはより穏やかなブレーキを使用しています。
- サインウェーブコミュテーション: 一部のファームウェアではより滑らかで静かな動作が可能。シネマティックビルドではこれを使用しています。モーターノイズの低減は著しく、オーディオ録音の品質を向上させます。
私の経験からのプロのヒント
何百ものドローンを製作し、考えられるすべての故障モードを経験した後、マニュアルには載っていない私の苦労して得た洞察を以下に示します:
- すべてのビルドにコンデンサーを追加: 電源入力にできるだけ近い位置に低ESRコンデンサー(470-1000μF)を追加せずにクアッドを組むことはありません。この簡単な追加により、無数のノイズ問題が解消され、ESCが電圧スパイクから保護されました。急激なスロットル変化時に、4Sシステムで30V以上の電圧スパイクを測定したことがあります。これはほとんどのコンポーネントの定格限界をはるかに超えています。
- すべてをソフトマウント: 振動は電子機器のサイレントキラーです。個別でも4-in-1ボードでも、すべてのESCにソフトマウントを使用しています。振動による故障の減少は、私のビルドで劇的でした。ナイロン製のハードウェアよりも、シリコンスタンドオフやゴム製のグロメットを好んで使用しています。
- コンフォーマルコーティングは安価な保険: すでにコーティングされているものも含め、すべてのESCにコンフォーマルコーティングを施しています。この追加の保護により、多くのボードが湿気やショートから守られました。コーティングされていない電子機器を破壊していたような小雨に遭遇しても、回復することができました。
- ESCとモーターを慎重にマッチング: 仕様上は互換性があるように見えても、特定のESCとモーターの組み合わせの方がうまく動作することがわかりました。うまくいった組み合わせはメモしておき、それを守るようにしています。新しい組み合わせを試す際は、必ずフライト前に十分なベンチテストを行います。
- 温度監視が重要: テスト中は毎フライト後にモーターとESCの温度をチェックします。高温のコンポーネントは故障しているコンポーネントです。早期に温度の問題を特定し、損傷を引き起こす前に対処することで、無数の故障を防ぐことができました。
- フィールドキットにスペアのESCを: 私の経験では、ESCは最も一般的な故障点の1つです。ビルドに合ったスペアと、フィールド修理用の小型はんだごてを常に携帯しています。これにより、そうでなければ早期に終了していたであろう多くのフライトセッションを救うことができました。
- 設定を文書化する: 各ビルドのすべてのESC設定を詳細にログに記録しています。これにより、ファームウェアのアップデートや破損したコンポーネントの交換時に、無数の時間を節約できました。シンプルなスプレッドシートやメモアプリが完璧に機能します。
- 新しいファームウェアは最初に1つのESCでテスト: 新しいファームウェアを試す際は、最初は1つのESCのみをアップデートし、他のESCをアップデートする前に徹底的にテストします。これにより、問題のあるファームウェアアップデートで4-in-1ボード全体をブリックすることを防げました。
- スタックマウントされたESCにはサーマルペーストを使用: スタックにマウントされた4-in-1 ESCの場合、ESCとフライトコントローラーの間に薄い層のサーマルペーストを塗布します。これにより熱伝導が改善され、コンパクトなビルドでも温度を管理しやすくなります。
- ハードウェアをアップグレードする前にファームウェアのアップグレードを検討: パフォーマンスが良くないESCを交換する前に、代替ファームウェアを試してみてください。JESCやBluejayなどのファームウェアアップグレードにより、交換コストの一部で古いハードウェアに新しい命を吹き込むことができました。
ESCの問題のトラブルシューティング
最高のESCでも問題が発生することがあります。私の豊富なトラブルシューティング経験に基づいて、一般的な問題を診断し、対処する方法を以下に示します。
ハードウェアのトラブルシューティング
電源の問題
症状:
- ESCが初期化されない。新しいビルドや修理後によく遭遇します。
- 動作が一貫していない。ベンチでは問題なく動作するのに、飛行中に電源の問題で動作しないESCがありました。
- 飛行中にシャットダウンする。ESCが空中で突然カットアウトするほど心臓が止まりそうになることはありません。これを何度か経験しました。
解決策:
- 電源接続を確認する。はんだ付け部分を拡大鏡で点検します。コールドジョイントは一般的な原因です。
- バッテリー電圧を確認する。特にストレージ充電したバッテリーでテストする際、ある電圧以下ではESCが初期化されないことがわかりました。
- フィルターコンデンサを追加または交換する。レースビルドで原因不明のシャットダウンを経験した後、低ESRコンデンサを追加したところ、問題が完全に解決しました。
- ショートを探す。マルチメーターの導通モードを使用して、電源とグラウンド間のショートを確認します。
- 適切なワイヤーゲージを確保する。激しい操作中にESCがシャットダウンする原因となる電圧サグを経験して、この教訓を学びました。
モーター接続の問題
症状:
- モーターが回転しない。はんだ付け不良からモーター巻線の損傷まで、あらゆる原因を突き止めました。
- モーターの動作が不安定。トラブルシューティングが特に難しい断続的な接続で経験しました。
- 過熱。回転しないのに非常に熱くなるモーターがありました。1相の部分的なショートが原因でした。
解決策:
- はんだ付け部分を確認する。肉眼では問題ないように見えるはんだ付け部分を単に再フローすることで、無数の問題を修正してきました。
- ワイヤーの導通を確認する。ESCからモーターまでの各ワイヤーをマルチメーターで確認します。絶縁体内のワイヤー破損は思ったより多いです。
- 相間のショートを探す。絶縁体の損傷により、診断が難しい断続的なショートが発生することがわかりました。
- モーターワイヤーの適切な絶縁を確保する。クラッシュでモーターワイヤーの絶縁体が損傷した後、問題を特定して修正するまで、飛行中にランダムなひきつりが発生しました。
- モーターをマルチメーターでテストする。相間の抵抗を確認します。大きな差は、巻線の損傷を示すことが多いです。
物理的損傷
症状:
- 部品の目に見える損傷。クラッシュ後は必ずESCを注意深く点検します。軽微な損傷でも問題を引き起こす可能性があります。
- 焦げた臭い。自分の鼻を信じることを学びました。ESCが焦げた臭いがする場合、機能しているように見えても、おそらく焼損しています。
- 変色。MOSFETが完全に故障する前に、わずかに色が変わるのを見たことがあります。これは今や注意すべき警告サインです。
- 部品の膨張。あるとき、コンデンサが故障する前に通常の2倍のサイズに膨らんだことがありました。今では定期的にチェックしています。
解決策:
- 損傷したESCを交換する。損傷したESCの修理を試みましたが、成功は限定的でした。交換が通常最も信頼できる解決策です。
- 損傷の原因を特定する。再発を防ぐために、常に故障の原因を特定するようにしています。ショート、過熱、製造上の欠陥が原因だったのでしょうか?
- より良い保護を実装する。クラッシュでESCを何個か失った後、これらの部品をより良く物理的に保護するようビルドを設計するようになりました。
- 水濡れの確認。軽度の水濡れのESCは、ヒートガンの低設定で完全に乾燥させることで回復させたことがありますが、大量の水濡れは通常交換が必要です。
パフォーマンスの問題
非同期化(デシンク)
症状:
- モーターの引っかかり。急激なスロットル変化時や、不適合な部品を使用しているときに、最もよく経験します。
- 一時的な電力損失。激しい操作中に一時的に電力が落ちるほど警告的なことはありません。
- 飛行中のひきつり。デシンクの問題で、ランダムにひきつるビルドがありました。非常に不安になります。
- 異常なモーター音。デシンクを示す特徴的な「ガリガリ」音を認識するようになりました。
解決策:
- デマグ補償を増やす。これがデシンクの問題に対する私の最も信頼できる修正策でした。今ではMedium未満の設定はめったに使用しません。
- モータータイミングを調整する。タイミングを増やすとデシンクの問題の一部に役立つことがわかりましたが、効率は犠牲になります。
- 最大スロットルを減らす。全開時のみデシンクが発生した後、スロットルを90%に制限することで問題が完全に解決しました。
- 別のESCファームウェアを試す。BLHeli_Sではデシンクするのに、Bluejayでは完璧に動作するモーターがありました。
- プロペラとモーターの不適合を確認する。軽いプロペラに切り替えることで解決した、永続的なデシンクを経験したことがあります。モーターが単に負荷に耐えられなかったのです。
過熱
症状:
- フライト後にESCが触れないほど熱い。快適に触れないほど熱い(約70°C以上)ものはすべて懸念材料だと考えています。
- 飛行中のサーマルシャットダウン。これを何度か経験しました。通常はホバリング中に十分な運がない限り、クラッシュにつながります。
- 時間の経過とともにパフォーマンスが低下する。高温で動作するESCは劣化が速く、数ヶ月後にはパフォーマンスが著しく低下することに気づきました。
解決策:
- エアフローと冷却を改善する。問題のあるビルドに専用の冷却ダクトを追加したところ、熱性能が劇的に改善しました。
- PWM周波数を下げる。問題のあるビルドでは48kHzから24kHzに下げ、10〜15°Cの温度低下を確認しました。
- 過剰な電流引き込みを確認する。電流計を使用して、実際の電流引き込みをESC定格と照合します。不適合な部品は過熱の一般的な原因です。
- アプリケーションに適したESCサイズを確認する。パワフルなビルドで30A ESCを繰り返し過熱させた後、45A ESCにアップグレードすることで問題が完全に解決しました。
- 可能であればヒートシンクを追加する。適切に取り付けたヒートシンクで5〜10°Cの温度低下を測定しました。最小限の重量ペナルティに十分見合う価値があります。
ノイズと干渉
症状:
- 無線干渉。スロットル位置と直接相関する制御リンクの劣化を経験しました。
- スロットルと相関するビデオノイズ。アナログビデオでの典型的な「スロットルライン」は、適切に対処するまで私の多くのビルドを悩ませてきました。
- フライトコントローラーのセンサーグリッチ。電気ノイズにより、特定のスロットル位置でジャイロデータが不安定になるのを見たことがあります。
解決策:
- コンデンサを追加または改善する。これが私の最も効果的な解決策でした。今では、低ESRコンデンサをすべてのビルドに標準的に追加しています。
- 信号線と電源線を分離する。信号線は電源線からできるだけ離してルーティングし、絶対に一緒にまとめません。
- 敏感な部品を遮蔽する。特に敏感な部品に銅テープを使って遮蔽を作成し、良好な結果を得ました。
- 電源リードにフェライトコアを使用する。バッテリーリードにフェライトコアを追加することで、ノイズが大幅に減少することを確認しました。
- 適切な接地を確保する。部品間の接地接続を改善することで、原因不明の干渉問題を解決しました。
ESCを交換するタイミング
ESCは以下の場合に交換する必要があります:
- 物理的な損傷は性能に影響します。私は限られた成功で損傷したESCを修理しようとしましたが、交換が通常最も信頼できる解決策です。
- MOSFETが故障しました。私はその兆候を認識することを学びました:過剰な熱、異常な音、またはモーターをスムーズに回転させられないこと。
- プロセッサの問題は不安定な動作の原因となります。ESCが適切な設定にもかかわらず一貫性のない動作をする場合、クラッシュのリスクを冒すよりも交換します。
- 大きな水濡れ損傷の後。私は一度、水濡れ損傷したESCを救おうとしましたが、2フライト後に空中で壊滅的に故障しました。今では即座に交換します。
- 新機能にアクセスするためにアップグレードする場合。私は、新しいハードウェアからのパフォーマンス向上がアップグレードのコストを正当化することがよくあることに気づきました。
- 信頼性が疑わしくなった場合。私は完全に信頼できないESCでは決して飛行しません。交換のコストはクラッシュしたドローンのコストよりはるかに低いです。
ESC技術の将来のトレンド
ESCの状況は急速に進化し続けています。最先端のコンポーネントのテストとメーカーとの議論に基づいて、私は物事が次のように進むと見ています:
ハードウェアの進歩
- GaN(窒化ガリウム)MOSFET:より効率的な電力スイッチング。私はGaN MOSFETを使用した初期のプロトタイプをテストし、効率の改善に感銘を受けました。同じバッテリーから最大15%長い飛行時間が得られます。
- 統合設計:ESCとモーターユニットの組み合わせ。私はこれらの統合システムの初期バージョンを試験し、特にスペースが重要なマイクロビルドで大きな可能性を感じています。
- より小さなフォームファクター:よりコンパクトな設計。私はESCがクレジットカードのサイズから切手よりも小さいサイズまで縮小し、より多くの電流を処理できるようになったのを見てきました。このトレンドは続くでしょう。
- より高い電流処理:電力密度の増加。私は、同じフォームファクターで電流処理能力がこの数年でほぼ2倍になったのを見てきました。
- より良い熱管理:冷却ソリューションの改善。統合された放熱設計の新しい設計は、私のテストで有望な結果を示しています。より小さなパッケージでより高いパフォーマンスを可能にしています。
ソフトウェアのイノベーション
- 高度なフィルタリング:より良い信号処理。ノイズを大幅に低減する強化されたフィルタリングアルゴリズムを備えたベータファームウェアをテストしました。その結果、より滑らかな飛行とより涼しいモーターが実現します。
- 適応アルゴリズム:自己調整機能。私は飛行条件に基づいてパラメータを自動的に調整するファームウェアを試験しています。特に、さまざまな環境で動作するビルドに役立ちます。
- 改良されたセンサレス整流:より正確なモーター制御。滑らかさの違いは、特に従来のESCがしばしば苦労する低スロットルで顕著です。
- 強化されたテレメトリー:より包括的なデータ。私がテストした新しいESCは、ビルドの最適化に役立つ消費電力メトリックを含む、より詳細な情報を提供します。
- スマートフォンとの統合:より簡単な設定。私はBluetoothを介してESCに直接接続するモバイルアプリをテストしています。これにより、ラップトップを持ち運ぶよりもフィールド調整がはるかに便利になります。
新興テクノロジー
- FOC(Field-Oriented Control):より正確なモーター制御。私はFOC対応のESCをテストしており、効率と滑らかさの改善は著しく、私のテストでは最大20%長い飛行時間が得られます。
- 予測アルゴリズム:負荷変動の予測。飛行性能に影響を与える前に、突然の負荷変動を予測して補正できる初期の実装を見てきました。特に、split-second応答性が重要なレースに役立ちます。
- 統合された安全機能:高度な保護システム。私がテストした最新のESCには、ショート、過熱、およびその他の故障モードに対する洗練された保護が含まれており、壊滅的な故障を大幅に減らします。
- メッシュネットワーキング:ESC間通信。ESCが負荷情報を共有して全体的なシステムパフォーマンスを最適化するプロトタイプシステムを試験しました。特に非対称ビルドに役立ちます。
- AI強化制御:機械学習の最適化。自己最適化ファームウェアを使用した初期テストでは有望な結果が得られています。ESCは実際に学習し、時間の経過とともに特定のモーターと飛行スタイルに適応します。
FAQ:ドローンのESCに関する一般的な質問
BLHeli_SとBLHeli_32の違いは何ですか?
BLHeli_SとBLHeli_32の違いは、主にハードウェアプラットフォームと機能です。私は両方を広範囲に使用しており、直接の経験を共有できます:
- BLHeli_S:8ビットプロセッサを使用、シンプルな設計、機能が少ない、コストが低い。私は今でもバジェットビルドやマイクロクアッドでこれらを使用しています。重量とコストが重要な要因です。カジュアルな飛行には十分な能力がありますが、パフォーマンスを追求するときには制限があることに気づきます。
- BLHeli_32:32ビットプロセッサを使用、より多くの処理能力、テレメトリーやLED制御などの高度な機能、コストが高い。初めてアップグレードしたときの違いはすぐに明らかでした。より滑らかなモーター制御、より良いブレーキ、より正確なスロットル応答。テレメトリー機能だけでも、本格的なビルドにアップグレードする価値があります。
BLHeli_32は、より良いパフォーマンス、より多くの設定オプション、テレメトリーやLED制御などの追加機能を提供しますが、BLHeli_Sは、多くのアプリケーションで十分な機能を備えたより費用対効果の高いソリューションを提供します。私は通常、予算が許す限りパフォーマンス重視のビルドにはBLHeli_32を、初心者や重量が重要なマイクロビルドにはBLHeli_Sをお勧めします。
ESCに必要なアンペア定格を知るにはどうすればよいですか?
適切なアンペア定格を決定するために、私は何百ものビルドで洗練されたこのプロセスに従います:
- 最大モーター電流を計算する:モーターKV×バッテリー電圧× 0.1(おおよその見積もり)。たとえば、4S(16.8V)の2400KVモーターは、最大で約40Aを引き出す可能性があります。この式は完璧ではありませんが、出発点を与えてくれます。
- モーター仕様を確認する:メーカーはしばしば最大電流消費を記載しています。私はこれらの定格に懐疑的になることを学びました。ベンチテストの経験に基づいて、通常、メーカーの主張に10〜15%を追加します。
- 20〜30%のヘッドルームを追加する:安全性と長寿命のために。サイズの小さいESCをいくつか燃やした後、私は今では常に計算された最大値に少なくとも25%のヘッドルームを追加します。このマージンにより、ESCが早期に故障するのを防いできました。
- 飛行スタイルを考慮する:アグレッシブな飛行にはより多くのヘッドルームが必要です。全開のパンチとアグレッシブな機動を行うレースビルドでは、さらにヘッドルームを追加します。通常、計算された最大値の30〜40%です。
たとえば、モーターが最大スロットルで30Aを引き出す可能性がある場合、少なくとも35〜40Aの連続電流定格のESCを選択することをお勧めします。この控えめなアプローチは、信頼性と長寿命の面で配当を支払うことがわかりました。わずかな重量のペナルティは安心に値します。
ESCの故障の原因は何ですか?
ESCの故障の一般的な原因には以下のようなものがあり、私はこれらすべてを直接経験しています:
- 過電流:ESCの電流処理能力を超えること。かつて、アグレッシブな飛行マニューバー中に30A ESCに45Aを流したことがあります。10秒ほどで小さな煙を出して壮大に故障しました。
- 過熱:冷却不足によるコンポーネントの損傷。換気の悪いビルドでESCの温度が110°Cを超えたことがあります。これはコンポーネントの安全動作範囲をはるかに超えています。
- 物理的損傷:クラッシュ、振動、不適切な取り付け。直接の衝撃損傷で何台ものESCを失い、振動によるはんだ疲労で最終的に接続不良になったものもあります。
- 水濡れ損傷:湿気によるショートや腐食。水上着陸後、クアッドを完全に乾かしたと思っていましたが、残留腐食のために2フライト後にESCが故障しました。
- 電圧スパイク:突然の電力変動によるコンポーネントの損傷。モーターブレーキ時に4Sシステムで30V以上のスパイクを測定したことがあります。適切なフィルタリングがないと、敏感なコンポーネントを損傷するのに十分な値です。
- 製造上の欠陥:品質管理の問題。コールドはんだ接合、コンポーネントの位置ずれ、部品の欠落などのESCを受け取ったことがあります。新しいコンポーネントは常に注意深く点検してください。
- 経年劣化:時間の経過によるコンポーネントの劣化。ESCは通常、特に限界近くで動作させた場合、飛行時間100〜200時間後に劣化の兆候を示し始めることに気づきました。
適切なサイジング、取り付け、保護により、ESCの寿命を大幅に延ばすことができます。私の最も古いESCは300時間以上の飛行時間がありますが、適切にサイジングされ、十分に冷却され、物理的損傷から保護されていたため、今でも完璧に機能しています。
同じドローンに異なるESCを混在させることはできますか?
技術的には可能ですが、異なるESCを混在させることは一般的にお勧めできません。意図的にも必要に迫られてもこれを何度か試したことがありますが、私が学んだことは以下の通りです:
- パフォーマンスの不一致:応答特性が異なる。かつて、3つの同一のESCと1つの異なるモデルでクアッドを組んだことがあります。特に急激なスロットル変化時に、ハンドリングの非対称性が顕著でした。
- スロットルカーブの違い:不均一な動力伝達。同じ設定でも、ESCモデルによってスロットルコマンドの解釈が若干異なります。同じスロットル入力で実際のモーター速度が最大7%変動することを測定しました。
- チューニングの難しさ:フライトコントローラー設定の最適化が困難。混在ESCビルドのチューニングに何時間も費やしましたが、3つのモーターではうまく機能する設定が4つ目では問題を引き起こすことがわかりました。
- トラブルシューティングの複雑さ:問題の診断時の変数が増える。混在ビルドで奇妙な飛行挙動を経験した際、追加の変数のために原因の特定にはるかに時間がかかりました。
ESCを混在させなければならない場合(故障後にフィールドで行わなければならなかったように)、同じファームウェアタイプを使用し、できるだけ同様に設定するようにしてください。同じメーカーの同一ファームウェアバージョンを実行しているESCを混在させた場合、慎重なチューニングで管理できるほど差異は最小限でした。
ESCファームウェアはどのくらいの頻度で更新すべきですか?
ESCファームウェアの更新に固定のスケジュールはありませんが、私は長年の経験から以下のガイドラインを作成しました:
- すべてがうまく機能している場合:更新する義務はありません。2〜3年前のファームウェアを実行しているビルドがいくつかありますが、それらは完璧に動作しているからです。「壊れていないなら直すな」の哲学に従っています。
- 新機能の場合:必要な機能がリリースに含まれている場合は更新します。双方向DShotが導入されたとき、互換性のあるESCをすべて即座に更新しました。利点が大きかったからです。
- バグ修正の場合:新しいリリースで対処されている問題が発生している場合は更新します。かつて、ファームウェアの更新によってその問題が完全に解決された、不可解な非同期のビルドがありました。
- 大きな変更の前:大きなハードウェアやフライトコントローラーの変更の前に更新します。互換性を確保するために、フライトコントローラーのファームウェアをアップグレードする前に、常にESCファームウェアを更新します。
- レーシングシーズン:重要なレース直前の更新は避けます。最後の瞬間の更新で微妙な操作性の違いが生じ、競技での私のパフォーマンスに影響を与えたことから、この教訓を学びました。
更新前には必ず設定をバックアップし、大きな更新後には再設定する準備をしてください。私は自分のビルドごとに設定の詳細なログを保管しており、更新の問題から回復する際に無数の時間を節約してくれました。
高いPWM周波数の利点は何ですか?
高いPWM(パルス幅変調)周波数は、私が広範なテストで検証したいくつかの利点を提供します:
- より滑らかなモーター動作:トルクリップルが少ない。飛行中の違いを感じることができます。特に精密ホバリングとゆっくりとした制御された動きで顕著です。
- より静かなパフォーマンス:可聴モーターノイズが少ない。24kHzから48kHzに上げたときに、モーターノイズが3〜5dB減少したことを測定しました。音声録音が重要なシネマティックな用途では大きな違いです。
- 潜在的によりよい効率:一部のシナリオでのスイッチング損失の減少。私の結果は混在しています。一部のセットアップでは効率が若干向上し、他では変化がありません。違いは通常小さいです(1〜3%)。
- より正確な制御:より細かいスロットル分解能。これは特にテクニカルフライト中の微調整で顕著です。モーターはわずかなスティック動作により予測可能に反応します。
ただし、高い周波数はESCでより多くの熱を発生させ、最大出力を減らす可能性があります。高い周波数で動作させると、5〜10°Cの温度上昇を測定しました。ほとんどのパイロットは、滑らかさと熱的考慮事項のバランスをとるのに24〜48kHzが最適な範囲であることに気づいています。私のビルドでは、滑らかさが最も重要なフリースタイルとシネマティックな用途には48kHz、効率と熱管理がより重要なレースとロングレンジには24kHzを使用しています。
ESCはフライトパフォーマンスに影響しますか?
ESCはいくつかの方法でフライトパフォーマンスに大きな影響を与えます。同一のビルドで異なるESCを使用してバックツーバックテストを行いましたが、その違いは劇的になる可能性があります:
- スロットルレスポンス: モーターが入力にどれだけ素早く反応するか。私は、低価格帯と高価格帯のESCの間で最大15msの応答時間の差を測定しました。この差は、特にレースシナリオでは、飛行中に絶対に感じることができます。
- スムーズさ: 安定性に影響を与える電力供給の品質。私がフリースタイルビルドで基本的なBLHeli_S ESCから高品質のBLHeli_32 ESCにアップグレードしたとき、特に安価なESCがしばしば苦労する中間スロットル範囲で、スムーズさの改善がすぐに明らかになりました。
- 一貫性: すべてのモーターにわたる信頼できるパフォーマンス。私は、高品質のESCが、温度、バッテリー電圧、負荷の変化の影響を受けにくく、さまざまな条件下でより一貫したパフォーマンスを維持することを示すデータを記録しました。
- 効率: 飛行時間に影響を与える電力使用量。制御されたテストでは、他のすべてのコンポーネントを同一に保ちながらESCをアップグレードするだけで、10〜15%の飛行時間の改善を測定しました。
- 機能: 飛行特性を改善するRPMフィルタリングなどの機能。双方向DShotとRPMフィルタリングの実装は、私のビルドの飛行感覚を一変させました。以前は除去が不可能だったプロップウォッシュの振動が、今では完全に消えました。
適切なファームウェアと設定を備えた高品質のESCは、特にレースやフリースタイルなどの要求の厳しいアプリケーションにおいて、飛行感覚を著しく改善できます。私はパイロットに目隠しをしてビルドをテストしてもらいましたが、低価格帯と高価格帯のESCの違いはすぐにわかりました。その改善は微妙なものではありません。
双方向DShotとは何で、なぜ重要なのか?
双方向DShotは、フライトコントローラーとESC間の双方向通信を可能にするプロトコル拡張です。この機能は私のビルドを革新しました:
- 主な利点: ESCからフライトコントローラーへのRPMフィードバックを可能にします。これを初めて実装したとき、実際のモーターRPMデータがリアルタイムで見えることに驚きました。それまでは利用できなかった可能性が開けたのです。
- RPMフィルタリング: フライトコントローラーが実際のモーター速度に基づいて正確なノイズフィルタリングを実装できるようにします。これは私のビルドにとってゲームチェンジャーでした。何年も苦労していたプロップウォッシュの振動が、突然完全に解消されたのです。
- 要件: 互換性のあるESCファームウェア(BLHeli_32、AM32、または修正されたBLHeli_S)とフライトコントローラーファームウェア。私はこの3つのファームウェアタイプすべてで、優れた結果を得ることができました。
- パフォーマンスへの影響: 飛行のスムーズさが大幅に向上し、プロップウォッシュの振動が減少しました。その違いは劇的です。振動なしでPID値をはるかに高く設定できるため、応答性が高く、操縦特性が優れたクアッドが実現します。
- セットアップの複雑さ: 標準のDShotよりも少し複雑ですが、最新のフライトコントローラーファームウェアでは十分に文書化されています。最初の双方向DShotシステムのセットアップに約1時間を要しましたが、今では数分で設定できます。
この機能は、飛行性能とチューニングの単純化に大きな利点があるため、パフォーマンス重視のビルドでは標準的なものになりつつあります。私は今、パフォーマンス指向のビルドには不可欠だと考えています。その改善は無視できないほど重要だからです。
結論
電子スピードコントローラーは、ドローンの飛行方法、反応、性能に直接影響を与える重要なコンポーネントです。何百ものドローンを構築、テスト、時には破壊してきた何年もの経験から、これらの見過ごされがちなコンポーネントが全体的な飛行体験にどれほど貢献しているかを理解するようになりました。
ESCのテクノロジー、プロトコル、ファームウェアのオプション、設定を理解することで、特定のニーズと飛行スタイルに合わせてパフォーマンスを最適化できます。パイロットが低価格のESCを使用しながら、高価なモーターとフライトコントローラーに何百ドルも費やしているのを見てきましたが、それではシステム全体の可能性を制限していることに気づいていないのです。
ESCの状況は、より強力なプロセッサー、より優れたファームウェア、高度な機能を備えたプラットフォームが登場し、急速に進化し続けています。適切なESCを選択し、適切に設定することで、モーターの可能性を最大限に引き出し、独自の飛行スタイルに合わせたパフォーマンス、効率、信頼性の完璧なバランスを実現できます。
最初のドローンを構築する場合でも、50機目のドローンを構築する場合でも、ESCの選択とセットアップに注意を払うことは、飛行性能と信頼性の向上につながります。私はこれらの教訓の多くを、墜落したドローン、焼損したコンポーネント、そして墜落した機体を回収するための長い歩みを通して、困難な方法で学びました。私の経験が、あなたがこれらの痛みを伴う教訓のいくつかを避け、ビルドを最大限に活用するのに役立つことを願っています。


