Drone ESC: Principi e Funzionamento
Gli Electronic Speed Controller (ESC) sono il collegamento vitale tra il tuo flight controller e i motori, traducendo i comandi digitali nella precisa erogazione di potenza che mantiene il tuo drone in aria. Dopo anni di costruzione e test di centinaia di droni, ho imparato ad apprezzare che questi sofisticati dispositivi sono molto più che semplici driver per motori: sono componenti ricchi di funzionalità con i propri processori, firmware e capacità che possono fare la differenza nella tua esperienza di volo. Ho imparato a mie spese che un guasto all'ESC significa più di un semplice drone precipitato; spesso significa una lunga camminata attraverso un terreno difficile per recuperare ciò che resta del tuo orgoglio e della tua gioia.
Questa guida completa esplora la tecnologia ESC, i protocolli, le opzioni di firmware, i criteri di selezione e le funzionalità avanzate basate sulla mia vasta esperienza pratica. Condividerò non solo le specifiche tecniche, ma anche le intuizioni pratiche che ho acquisito attraverso innumerevoli costruzioni, incidenti e sessioni di risoluzione dei problemi per aiutarti a comprendere e ottimizzare questo componente critico del tuo drone FPV.
Introduzione agli Electronic Speed Controller
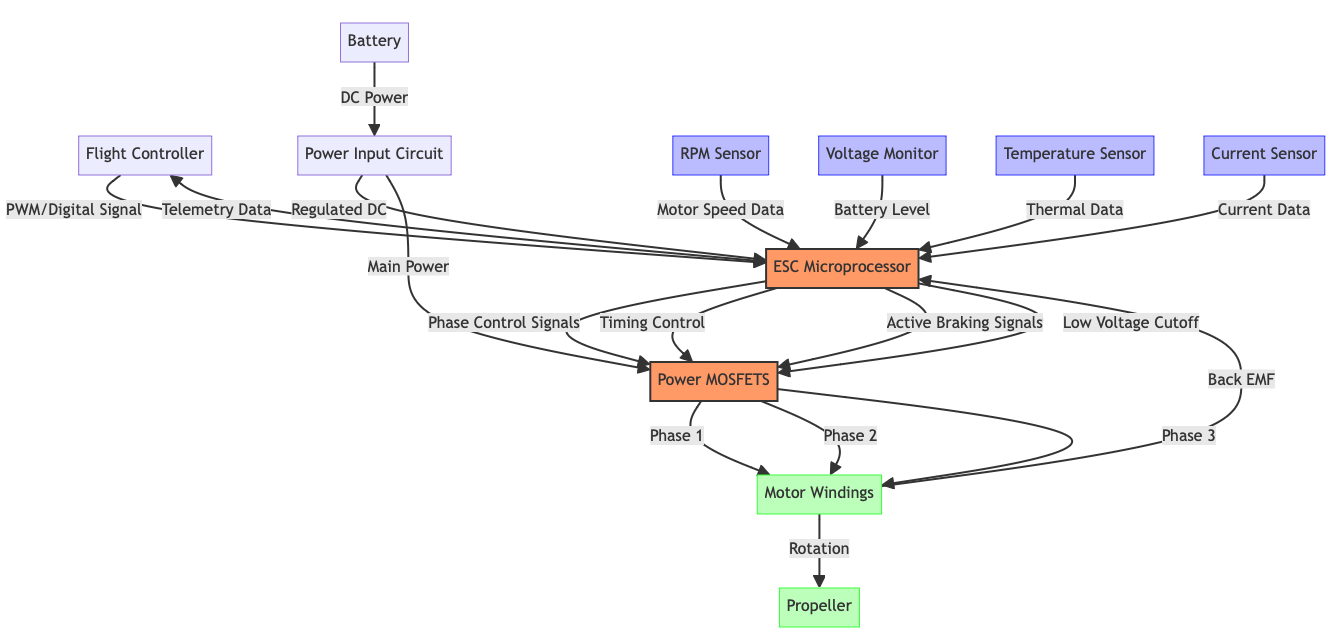
Un ESC è un circuito elettronico che controlla e regola la velocità di un motore brushless. Ricordo ancora la mia prima build con ESC primitivi che a malapena mantenevano i motori in rotazione costante, ben lontani dai sofisticati dispositivi che usiamo oggi. Nei droni FPV, gli ESC svolgono diverse funzioni critiche che ho imparato ad apprezzare di più ad ogni build:
- Controllo del motore: Convertire la potenza DC della batteria nella potenza AC trifase richiesta dai motori brushless. Ho visto la differenza tra ESC economici che producono un funzionamento del motore irregolare e rumoroso e quelli di qualità che forniscono una potenza fluida e precisa.
- Regolazione della velocità: Controllare con precisione gli RPM del motore in base ai comandi del flight controller. La reattività del tuo drone dipende molto da quanto velocemente i tuoi ESC possono regolare la velocità del motore, qualcosa che noto immediatamente quando testo una nuova build.
- Frenata: Rallentare o fermare attivamente i motori quando necessario. Ho trovato questo particolarmente importante per il volo freestyle, dove le fermate rapide e i cambi di direzione sono essenziali.
- Protezione della batteria: Monitorare la tensione e implementare interruzioni per prevenire danni. Ho salvato innumerevoli batterie da una morte prematura grazie a una corretta protezione da bassa tensione.
- Telemetria: Fornire dati su prestazioni, temperatura e RPM (nei modelli avanzati). Questa funzione ha trasformato il modo in cui metto a punto i miei quad, fornendo informazioni che erano impossibili da ottenere solo pochi anni fa.
L'evoluzione degli ESC per droni
Ho assistito alla drammatica evoluzione degli ESC da quando ho iniziato il mio hobby nel 2019, e la progressione è stata a dir poco notevole:
- Primi ESC (2010-2014): Driver per motori di base con funzionalità limitate e firmware SimonK. Questi dispositivi primitivi richiedevano una calibrazione attenta e offrivano prestazioni minime.
- Era BLHeli (2015-2017): Prestazioni migliorate, protocolli digitali e opzioni di configurazione. Questo è stato un cambiamento epocale: improvvisamente le persone potevano connettersi agli ESC attraverso il flight controller e regolare le impostazioni senza saldare o utilizzare programmatori hardware.
- BLHeli_S (2017-2018): Elaborazione migliorata, prestazioni superiori e più funzionalità.
- BLHeli_32 (2018-presente): Elaborazione a 32 bit, telemetria e capacità avanzate.
- Alternative moderne (2020+): AM32, JESC e altre opzioni di firmware con caratteristiche uniche. Ho sperimentato queste opzioni più recenti, in particolare AM32, che ha dato nuova vita ad alcuni dei miei hardware più vecchi.
Questa progressione ha portato a ESC più piccoli e capaci, con funzionalità e prestazioni sempre più sofisticate. Personalmente sono passato da ESC ingombranti e separati che richiedevano il montaggio su ogni braccio a minuscole schede 4-in-1 che pesano meno di un singolo vecchio ESC pur offrendo capacità molto maggiori.
Componenti di base di un ESC
Gli ESC moderni integrano diversi componenti chiave che lavorano insieme per creare l'esperienza di volo. Permettimi di guidarti attraverso ciò che ho imparato su questi componenti in anni di costruzione e risoluzione dei problemi.
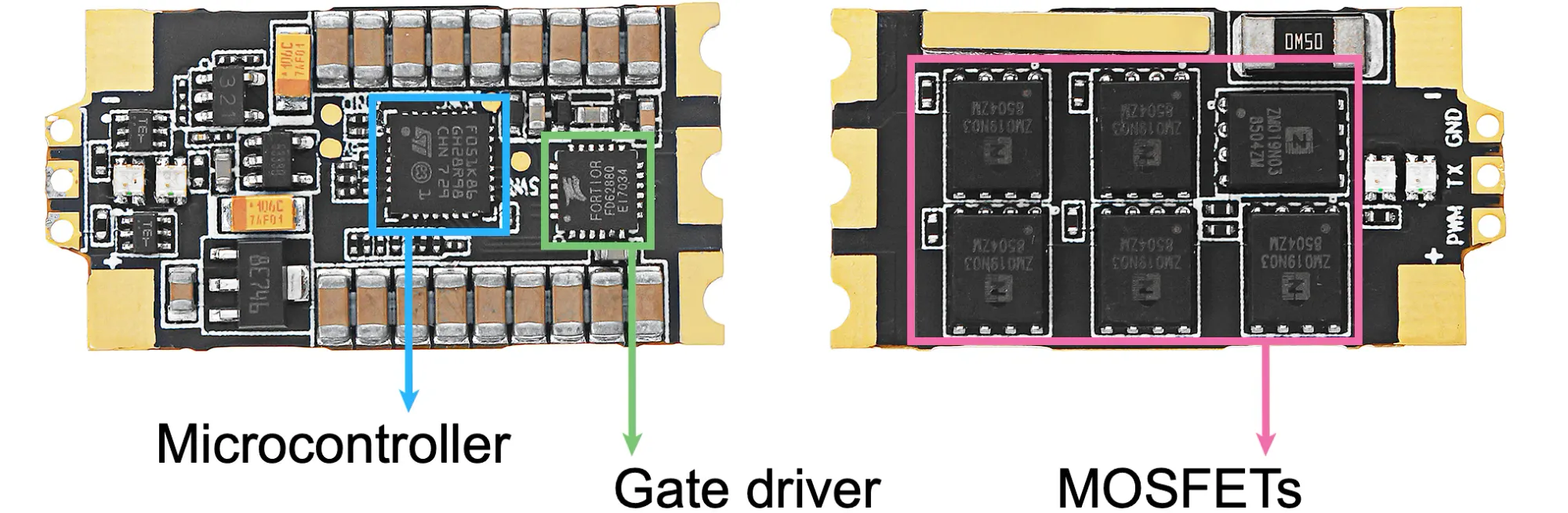
Microprocessore
Il cervello dell'ESC, che elabora i comandi e controlla l'erogazione di potenza:
- Processori a 8 bit: Si trovano negli ESC più vecchi e nei modelli BLHeli_S economici. Ho iniziato con questi e, sebbene facessero il loro lavoro, le limitazioni erano frustranti quando si spingevano le prestazioni.
- Processori a 32 bit: Utilizzati in BLHeli_32 e ESC più recenti, offrono maggiore potenza di elaborazione. La prima volta che sono passato a un ESC a 32 bit, la differenza in termini di reattività e funzionalità è stata immediatamente percepibile.
- ARM Cortex: Comuni negli ESC ad alte prestazioni, abilitano funzionalità avanzate. Li uso nelle mie build da competizione dove ogni millisecondo di tempo di risposta conta.
MOSFET (Metal-Oxide-Semiconductor Field-Effect Transistor)
Componenti di commutazione di potenza che controllano il flusso di corrente verso le fasi del motore. Ho imparato che la qualità dei MOSFET è spesso ciò che distingue gli ESC premium dalle opzioni economiche:
- Qualità dei MOSFET: Determina l'efficienza, la generazione di calore e la gestione della corrente. Ho bruciato abbastanza MOSFET economici da sapere che investire in qualità qui paga dividendi in termini di affidabilità e prestazioni.
- Numero di MOSFET: In genere 6 per motore (2 per fase). Alcune delle mie build ad alte prestazioni utilizzano ESC con MOSFET raddoppiati per una migliore gestione della corrente e distribuzione del calore.
- Disposizione dei MOSFET: Influisce sulle prestazioni e sulla durata. Ho notato che gli ESC con un migliore layout dei MOSFET tendono a funzionare più freschi, anche sotto carichi pesanti.
Componenti di supporto
Circuiti aggiuntivi che consentono il corretto funzionamento. Questi componenti spesso trascurati possono fare una differenza significativa nelle prestazioni:
- Condensatori: Filtrano il rumore e levigano l'erogazione di potenza. Aggiungo sempre condensatori di filtro extra alle mie build dopo aver imparato a proprie spese come il rumore elettrico può influenzare le prestazioni di volo.
- Regolatori di tensione: Forniscono l'alimentazione appropriata al microprocessore. Ho avuto ESC che si sono guastati a causa di una scarsa regolazione della tensione, specialmente quando si utilizzano configurazioni a tensione più elevata.
- Sensori di corrente: Misurano il consumo di energia (negli ESC con telemetria). La precisione di questi sensori varia ampiamente: ho scoperto che gli ESC di fascia alta tendono ad avere una misurazione della corrente più precisa.
- Sensori di temperatura: Monitorano il calore per la protezione (nei modelli avanzati). Questa funzione ha salvato diverse delle mie build dai danni termici durante le lunghe sessioni di volo estive.
Interfacce di Input/Output
Connessioni per la comunicazione e l'alimentazione:
- Ingresso del segnale: Riceve i comandi dal flight controller. Ho scoperto che la qualità di queste connessioni influisce in modo significativo sull'affidabilità: giunti di saldatura freddi qui hanno causato più di qualche guasto misterioso nelle mie build.
- Connessioni di alimentazione: Pad di ingresso della batteria e di uscita del motore. Uso sempre fili di sezione appropriata qui: ho imparato attraverso un guasto spettacolare che i fili sottodimensionati non possono gestire le correnti di picco.
- Uscita telemetria: Invia i dati di nuovo al flight controller (se supportato). Questa funzione ha trasformato il modo in cui monitoro i miei quad in volo, fornendo dati in tempo reale che aiutano a prevenire danni ai componenti.
Tipi e configurazioni hardware degli ESC
Gli ESC sono disponibili in vari form factor e configurazioni per adattarsi a diverse build e requisiti. Nel corso degli anni, ho utilizzato praticamente ogni tipo di configurazione ESC disponibile e ognuna ha il suo posto a seconda di ciò che si sta costruendo.
ESC individuali vs 4-in-1
ESC individuali
ESC separati per ogni motore. Ho iniziato con questi e li uso ancora per alcune build:
Vantaggi:
- Più facili da sostituire in caso di guasto. Ho salvato innumerevoli sessioni di volo avendo un ESC individuale di riserva nel mio kit da campo.
- Migliore dissipazione del calore. Ho trovato questo particolarmente importante per le build ad alte prestazioni che spingono al limite la gestione della corrente.
- Possibilità di mixare e abbinare le valutazioni se necessario. Ho costruito quad asimmetrici in cui diversi motori richiedevano diverse valutazioni ESC.
- Spesso più opzioni di montaggio flessibili. Ho creato alcune build insolite in cui il montaggio standard non era possibile.
Svantaggi:
- Maggiore complessità del cablaggio. Ho trascorso molte ore a instradare meticolosamente i fili per mantenere le build pulite.
- Potenzialmente peso totale più elevato. Ogni grammo conta nelle build da corsa e ho misurato differenze di 10-15 g rispetto alle soluzioni 4-in-1.
- Occupa più spazio sul telaio. Questo limita gli altri componenti che puoi aggiungere.
- Di solito più costoso in totale. In genere ho speso il 20-30% in più quando ho usato ESC individuali.
Migliori per:
- Build più grandi con ampio spazio. I miei cruiser a lungo raggio utilizzano in genere ESC individuali.
- Piloti che danno priorità alla riparabilità. Li consiglio agli amici che volano in aree remote.
- Build personalizzate con diversi requisiti del motore. Li ho usati per configurazioni asimmetriche sperimentali.
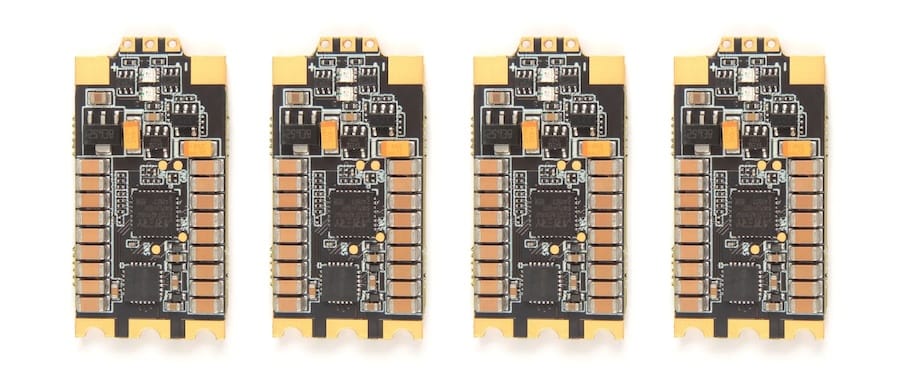
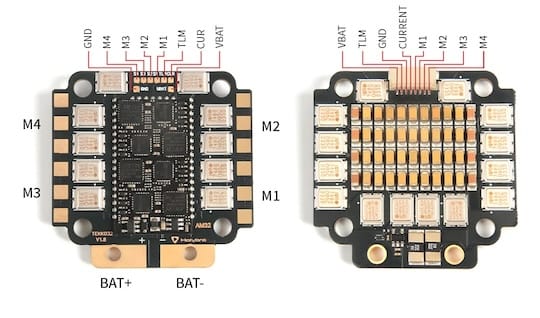
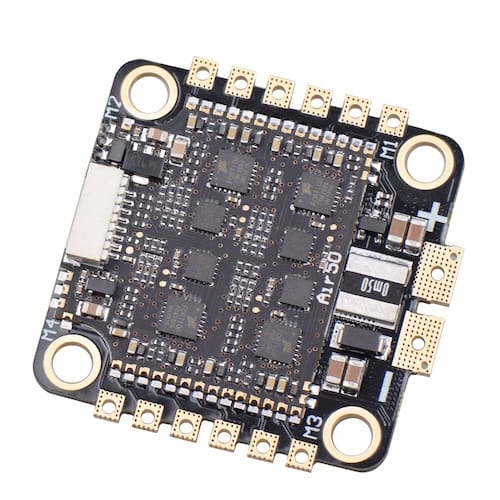
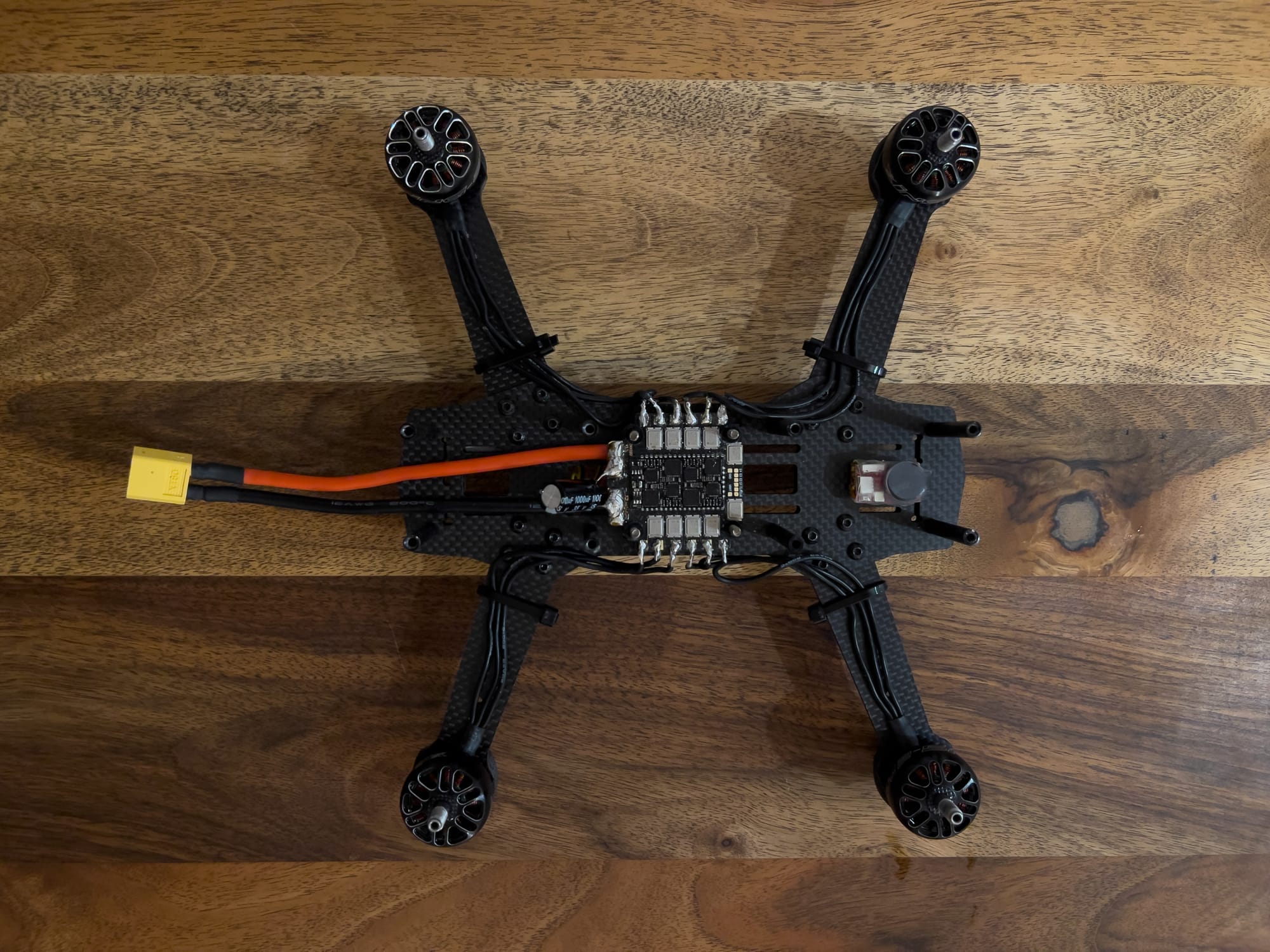
Schede ESC 4-in-1
Quattro ESC integrati su un singolo PCB. Questi sono diventati la mia scelta preferita per la maggior parte delle build:
Vantaggi:
- Cablaggio più pulito e semplice. Le mie build sono diventate molto più ordinate quando sono passato agli ESC 4-in-1.
- Di solito peso totale inferiore. Ho risparmiato fino a 15 g sulle build da corsa utilizzando ESC 4-in-1.
- Occupa meno spazio. Questo consente build più compatte o spazio per componenti aggiuntivi.
- Spesso più conveniente come pacchetto. In genere risparmio il 20-30% rispetto agli ESC individuali equivalenti.
- Installazione più facile. Posso completare una build in circa la metà del tempo utilizzando un ESC 4-in-1.
Svantaggi:
- Se un ESC si guasta, potrebbe essere necessario sostituire l'intera scheda. Ho perso intere schede a causa di un singolo cortocircuito del motore, una lezione costosa.
- Generazione di calore concentrata. Ho imparato a garantire un adeguato flusso d'aria nelle build strette per prevenire problemi termici.
- Meno flessibilità per setup di motori misti. Questo ha limitato alcune delle mie build più sperimentali.
Migliori per:
- Build pulite con cablaggio minimo. Tutti i miei droni con telecamera utilizzano ESC 4-in-1 per la configurazione più pulita possibile.
- Configurazioni standard di quadricotteri. I miei quad da corsa e freestyle ora utilizzano quasi esclusivamente ESC 4-in-1.
- Build basate su stack con flight controller abbinati. L'integrazione tra gli stack FC e ESC moderni è imbattibile.
Fattori di forma degli ESC
ESC standard
ESC individuali tradizionali:
- Dimensioni: Tipicamente lunghi 20-30mm. Ricordo quando gli ESC erano delle dimensioni di un pollice, ora sono spesso più piccoli di un'unghia.
- Montaggio: Varie opzioni tra cui guaina termoretraibile, fascette o supporti dedicati. Le ho provate tutte e ho optato per il montaggio morbido con rivestimento conforme per il miglior isolamento dalle vibrazioni.
- Connessioni: Di solito fili per segnale e alimentazione. Ho imparato a tenerli il più corti possibile per ridurre resistenza e peso.

ESC Stack 20×20mm
Progettati per essere impilati con i flight controller:
- Dimensioni: Schema di montaggio 20×20mm. Ho convertito la maggior parte dei miei build sotto i 250g a questo formato.
- Montaggio: Stack standard con flight controller. Uso sempre un montaggio morbido tra gli strati dello stack dopo aver imparato quanto le vibrazioni possano influire sulle prestazioni.
- Connessioni: Pad per saldatura diretta o cavi a nastro. Preferisco la saldatura diretta per l'affidabilità, anche se i cavi a nastro facilitano la manutenzione.

ESC Stack 30.5×30.5mm
ESC più grandi compatibili con stack:
- Dimensioni: Schema di montaggio 30.5×30.5mm. Li uso per i miei build freestyle e long range dove ho bisogno di gestire più potenza.
- Montaggio: Stack standard con flight controller. Ho scoperto che lo schema di montaggio più grande offre una migliore stabilità nei build più grandi.
- Connessioni: Pad per saldatura diretta o cavi a nastro. Le schede più grandi in genere offrono punti di connessione più robusti, che apprezzo quando lavoro con fili di sezione maggiore.
Soluzioni AIO (All-In-One)
ESC integrati con flight controller:
- Dimensioni: Varie, tipicamente 20×20mm o 30.5×30.5mm. Li uso esclusivamente nei miei micro build.
- Integrazione: FC e ESC combinati in un'unica scheda. Ero scettico su questo approccio inizialmente, ma l'affidabilità è migliorata drasticamente negli ultimi anni.
- Connessioni: Connessioni interne semplificate. La riduzione dei cablaggi esterni ha eliminato molti potenziali punti di guasto nei miei build.

Valori di Corrente e Specifiche
Gestione della Corrente
La corrente massima continua che un ESC può gestire in sicurezza. Ho imparato ad essere conservativo con questi valori dopo aver visto ESC letteralmente fondersi durante voli aggressivi:
- Droni da Gara: 35-50A per motore. I miei build da gara di solito usano ESC da 45A anche se raramente assorbono più di 35A in continuo - il margine offre tranquillità durante le gare intense.
- Droni Freestyle: 30-45A per motore. Per il freestyle, ho scoperto che avere un margine di corrente è essenziale per quei momenti in cui si spingono i limiti con manovre aggressive.
- Long Range/Cinematici: 25-40A per motore. I miei build long range di solito usano ESC da 35A, che offrono un buon equilibrio tra gestione della corrente ed efficienza.
- Micro Build: 10-25A per motore. Ho scoperto che anche i piccoli build possono assorbire quantità sorprendenti di corrente durante voli aggressivi, quindi non scendo sotto i 20A per nulla tranne i più piccoli whoop.
Valori di Picco
Corrente massima di breve durata. Ho imparato a non fare troppo affidamento su questi valori:
- Tipici Valori di Picco: 1.5-2× il valore continuo. Nei miei test, ho scoperto che molti ESC non possono effettivamente sostenere i loro valori di picco dichiarati per l'intera durata dichiarata.
- Durata: Di solito specificata per 5-10 secondi. Li ho cronometrati durante test al banco e ho riscontrato variazioni significative tra i produttori.
- Importanza: Fondamentale per gestire colpi di acceleratore e manovre aggressive. Ho notato che gli ESC con MOSFET di qualità superiore tendono a gestire molto meglio le correnti di picco rispetto alle opzioni economiche.
BEC (Battery Eliminator Circuit)
Regolazione della tensione per alimentare altri componenti. Questa funzione è diventata meno importante nei build moderni:
- BEC Lineare: Semplice, meno efficiente, si trova negli ESC più vecchi. Li usavo nei miei primi build e notavo che si scaldavano parecchio quando alimentavano più periferiche.
- BEC a Commutazione: Più efficiente, comune negli ESC moderni. La ridotta generazione di calore fa una differenza evidente nei build compatti.
- Valori: Tipicamente 5V a 1-3A. Ho scoperto che 2A di solito sono sufficienti per la maggior parte dei build a meno che non si alimentino accessori esigenti come strisce LED.
La maggior parte dei build moderni basati su stack non usa i BEC degli ESC. Ora uso PDB dedicati o flight controller con regolazione di tensione integrata per un'alimentazione più pulita.
Protocolli e Comunicazione ESC
Il protocollo determina come il flight controller comunica con l'ESC, influenzando prestazioni e funzionalità. Ho usato ogni protocollo dal PWM standard al più recente DShot bidirezionale e l'evoluzione è stata notevole.
PWM Standard
Il protocollo analogico originale:
- Tipo di segnale: Modulazione di larghezza di impulso (50-400Hz). Ho iniziato con questo sui miei primi build, e i limiti erano immediatamente evidenti.
- Risoluzione: Intervallo 1000-2000μs (circa 8 bit). I gradini grossolani erano percepibili in volo, creando un effetto "scalinata" nella risposta del throttle.
- Latenza: 2-4ms. Sembrava un'eternità quando cercavo di eseguire manovre precise.
- Vantaggi: Compatibilità universale. Potevo usare qualsiasi ESC con qualsiasi flight controller—l'unico vero vantaggio.
- Svantaggi: Latenza elevata, bassa risoluzione, nessuna telemetria. I miei primi quad basati su PWM sembravano lenti e imprecisi rispetto ai build moderni.
- Utilizzo attuale: Obsoleto per i droni FPV. Non uso PWM da anni e non lo consiglierei per nessun build moderno.
OneShot125
Primo protocollo digitale:
- Tipo di segnale: Temporizzazione digitale (125-250Hz). Questo è stato il mio primo assaggio di protocolli digitali, e il miglioramento era evidente.
- Risoluzione: Intervallo 125-250μs (circa 10 bit). La risposta più fluida del throttle ha fatto la differenza nella sensazione di volo.
- Latenza: 1-2ms. Ancora alta per gli standard odierni, ma un miglioramento significativo rispetto al PWM.
- Vantaggi: Meglio del PWM standard. I miei quad sembravano più reattivi quando ho fatto questo passaggio.
- Svantaggi: Latenza ancora relativamente alta. Potevo sentire il ritardo durante le manovre rapide.
- Utilizzo attuale: In gran parte superato da DShot. Non uso OneShot da anni.
Multishot
Protocollo più veloce per le gare:
- Tipo di segnale: Temporizzazione digitale (fino a 32kHz). Quando ho provato per la prima volta questo protocollo, la riduzione della latenza era immediatamente evidente.
- Risoluzione: Intervallo 5-25μs (circa 12 bit). La risoluzione più fine del throttle ha reso più facili il hovering e i movimenti precisi.
- Latenza: 0,2-0,5ms. Questo è stato un punto di svolta per le gare—i miei input sembravano quasi istantaneamente tradotti in cambiamenti del motore.
- Vantaggi: Latenza molto bassa. I miei build da gara che usavano Multishot avevano una nitidezza che non era possibile con i protocolli precedenti.
- Svantaggi: Meno affidabile di DShot. Ho riscontrato occasionali glitch che mi hanno portato a passare a DShot per la maggior parte dei build.
- Utilizzo attuale: Applicazioni di nicchia. Ho ancora un build da gara specializzato che usa Multishot, ma è raro nei quad moderni.
DShot
L'attuale famiglia standard di protocolli digitali:
- Tipo di segnale: Pacchetti di dati digitali. La robustezza di questo approccio ha eliminato molti dei problemi di affidabilità che ho riscontrato con i protocolli precedenti.
- Varianti:
- DShot150: Velocità di trasmissione dati di 150kbps. L'ho usato su micro build dove la potenza di elaborazione è limitata.
- DShot300: Velocità di trasmissione dati di 300kbps. Un buon equilibrio per la maggior parte dei build—lo uso quando non sono sicuro dell'integrità del segnale.
- DShot600: Velocità di trasmissione dati di 600kbps (più comune). Questo è il mio standard per la maggior parte dei build, offrendo prestazioni eccellenti senza spingere al limite.
- DShot1200: Velocità di trasmissione dati di 1200kbps. Lo uso su build ad alte prestazioni con percorsi di segnale corti e puliti.
- Risoluzione: 16 bit (intervallo di valori 0-2047). Il controllo fine che questo consente è notevole—posso fare minuscole regolazioni del throttle che non erano possibili con i protocolli precedenti.
- Latenza: 0,2-0,5ms a seconda della variante. Nei test back-to-back, potevo sentire la differenza tra DShot150 e DShot600 nei build reattivi.
- Vantaggi: Precisione digitale, controllo degli errori, comandi, capacità bidirezionale. Il solo miglioramento dell'affidabilità ha reso questo protocollo degno di passare.
- Svantaggi: Richiede hardware compatibile. Ho dovuto aggiornare alcuni dei miei vecchi ESC per usare questo protocollo.
- Utilizzo attuale: Standard per i build moderni. Ora uso DShot600 su praticamente tutti i miei build.
ProShot
Versione ottimizzata di DShot:
- Tipo di segnale: DShot semplificato. Quando ho testato questo protocollo, le differenze da DShot erano sottili.
- Velocità di trasmissione dati: Simile a DShot600. Nei miei test, le prestazioni erano paragonabili.
- Latenza: Leggermente inferiore a DShot. Potevo a malapena percepire la differenza nella maggior parte degli scenari di volo.
- Vantaggi: Potenzialmente minor carico sulla CPU. Ho notato questo vantaggio principalmente sui flight controller F4 che eseguono configurazioni complesse.
- Svantaggi: Adozione limitata. Ho trovato meno risorse per la risoluzione dei problemi quando si presentavano.
- Utilizzo attuale: Raro, per lo più superato da DShot. Ho sperimentato ProShot ma alla fine sono tornato a DShot per un migliore supporto della community.
DShot bidirezionale
DShot migliorato con telemetria:
- Tipo di segnale: Comunicazione DShot bidirezionale. Questa è stata una rivelazione quando l'ho implementata per la prima volta—improvvisamente il mio flight controller sapeva esattamente cosa stavano facendo i motori.
- Caratteristiche: Abilita il feedback RPM per il filtraggio. Il miglioramento delle prestazioni di volo è stato drammatico sul mio primo build con questa funzione.
- Requisiti: Firmware ESC e flight controller compatibili. Ho dovuto aggiornare diversi componenti per sfruttare questa capacità.
- Vantaggi: Abilita il filtraggio RPM, migliora le prestazioni. La riduzione del rumore e delle vibrazioni era immediatamente evidente nei miei log blackbox.
- Svantaggi: Configurazione leggermente più complessa. Ho trascorso alcune ore per far funzionare correttamente la mia prima configurazione bidirezionale.
- Utilizzo attuale: Sempre più standard per i build ad alte prestazioni. Ora abilito questa funzione su tutti i build compatibili—i vantaggi sono troppo significativi per essere ignorati.
Confronto dei protocolli
Sulla base dei miei ampi test su più build, ecco come si confrontano questi protocolli:
| Protocollo | Risoluzione | Latenza | Controllo errori | Telemetria | Comandi | Utilizzo attuale |
|---|---|---|---|---|---|---|
| PWM | 8 bit | 2-4ms | No | No | No | Obsoleto |
| OneShot125 | 10 bit | 1-2ms | No | No | No | Legacy |
| Multishot | 12 bit | 0,2-0,5ms | No | No | No | Di nicchia |
| DShot150 | 16 bit | ~0,5ms | Sì | Opzionale | Sì | Entry-level |
| DShot300 | 16 bit | ~0,3ms | Sì | Opzionale | Sì | Comune |
| DShot600 | 16 bit | ~0,2ms | Sì | Opzionale | Sì | Standard |
| DShot1200 | 16 bit | ~0,1ms | Sì | Opzionale | Sì | High-end |
| ProShot | 16 bit | ~0,2ms | Sì | Opzionale | Sì | Raro |
Opzioni firmware ESC
Il firmware è il software che gira sul microprocessore dell'ESC, determinandone le capacità e il comportamento. Ho sperimentato tutte le principali opzioni firmware, e ognuna ha i suoi punti di forza e di debolezza.
BLHeli_S
Popolare firmware a 8 bit che ho usato ampiamente:
- Compatibilità hardware: ESC a 8 bit. Ho iniziato con questi nei miei primi build e li uso ancora per alcune applicazioni.
- Caratteristiche: Controllo motore di base, configurazione limitata. Anche se non sono ricchi di funzionalità come le opzioni a 32 bit, ho scoperto che gestiscono bene le funzioni essenziali.
- Prestazioni: Buoni per build di livello base e intermedio. Ho costruito dozzine di quad con ESC BLHeli_S che volano splendidamente per freestyle e gare amatoriali.
- Configurazione: Software BLHeli Configurator. Apprezzo l'interfaccia semplice, anche se mancano alcune opzioni avanzate.
- Vantaggi: Ampiamente supportati, affidabili. Ho scoperto che sono incredibilmente affidabili—alcuni dei miei build più vecchi funzionano ancora con BLHeli_S senza problemi.
- Svantaggi: Funzionalità limitate rispetto alle opzioni a 32 bit. Ho raggiunto il limite di ciò che è possibile con questi quando si spingono i limiti delle prestazioni.
BLHeli_32
Firmware avanzato a 32 bit che ha rivoluzionato i miei build:
- Compatibilità hardware: ESC a 32 bit. Ho aggiornato tutti i miei quad principali all'hardware BLHeli_32 quando è diventato disponibile.
- Caratteristiche: Configurazione estesa, telemetria, controllo LED. La prima volta che ho avuto accesso ai dati di telemetria, ha trasformato il modo in cui monitoravo i miei build durante il volo.
- Prestazioni: Eccellenti per tutte le applicazioni. Ho usato ESC BLHeli_32 per tutto, dai tiny whoop ai cruiser a lungo raggio, con risultati sempre impressionanti.
- Configurazione: Software BLHeli_32 Configurator. L'interfaccia è più completa di BLHeli_S, dandomi accesso a impostazioni di cui non sapevo nemmeno di aver bisogno finché non le ho avute.
- Vantaggi: Ricco di funzionalità, alte prestazioni. La differenza è stata subito evidente quando ho fatto l'upgrade—controllo motore più fluido, frenata migliore e risposta dell'acceleratore più precisa.
- Svantaggi: Proprietario, richiede una licenza a pagamento per i produttori. Questo ha limitato alcune innovazioni e mantenuto i prezzi più alti di quanto avrebbero potuto essere.
AM32
Alternativa open source a BLHeli_32 che sto adottando sempre di più:
- Compatibilità hardware: ESC a 32 bit. Ho flashato con successo questo firmware su diverse marche di ESC a 32 bit.
- Caratteristiche: Simile a BLHeli_32, guidato dalla comunità. Sono rimasto impressionato da quanto velocemente vengono implementate nuove funzionalità in base al feedback degli utenti.
- Prestazioni: Paragonabili a BLHeli_32. Nei miei test back-to-back, non ho notato differenze nella sensazione di volo tra build identici con BLHeli_32 vs AM32.
- Configurazione: AM32 Configurator o JESC Configurator. L'interfaccia non è così raffinata, ma svolge il lavoro in modo efficace.
- Vantaggi: Open source, gratuito, sviluppo attivo. Apprezzo l'aspetto comunitario e il rapido ritmo di miglioramento.
- Svantaggi: Supporto meno diffuso. Ho dovuto fare più ricerche per risolvere i problemi rispetto alle opzioni più consolidate.
JESC
Firmware avanzato basato su BLHeli_S che ha dato nuova vita al mio vecchio hardware:
- Compatibilità hardware: ESC BLHeli_S. Ho usato questo per aggiornare diversi vecchi build senza sostituire gli ESC.
- Caratteristiche: PWM a 48kHz, prestazioni migliorate. La frequenza PWM più alta ha fatto una differenza notevole nella fluidità del motore sui miei build freestyle.
- Prestazioni: Migliori di BLHeli_S di serie. Ero scettico riguardo alle affermazioni fino a quando non l'ho provato: il miglioramento nella reattività e nella fluidità valeva decisamente l'aggiornamento.
- Configurazione: JESC Configurator. L'interfaccia è simile a BLHeli_S Configurator, rendendo la transizione facile.
- Vantaggi: Migliora le prestazioni dell'hardware esistente. Ho risparmiato centinaia aggiornando il firmware invece di sostituire gli ESC.
- Svantaggi: Richiede una licenza a pagamento. Anche se non costosa, inizialmente ero riluttante a pagare per il firmware quando esistono opzioni gratuite. Dopo averlo provato, considero che i soldi siano ben spesi.
Bluejay
Firmware open-source per hardware BLHeli_S con cui ho recentemente sperimentato:
- Compatibilità hardware: ESC BLHeli_S. Ho flashato con successo questo su diversi dei miei vecchi ESC.
- Caratteristiche: Prestazioni migliorate, sviluppo aperto. Apprezzo particolarmente il controllo migliorato della potenza di avvio, che ha eliminato l'occasionale esitazione che ho riscontrato con il firmware di serie.
- Prestazioni: Migliori di BLHeli_S di serie. Nei miei test, è quasi alla pari con JESC ma senza il costo della licenza.
- Configurazione: Bluejay Configurator. L'interfaccia è semplice e include alcune caratteristiche uniche non presenti in altri configuratori.
- Vantaggi: Gratuito, open-source. Adoro supportare progetti guidati dalla comunità, specialmente quando funzionano così bene.
- Svantaggi: Compatibilità hardware limitata. Ho avuto alcuni ESC che non erano compatibili, il che è stato frustrante quando ho cercato di standardizzare tra i build.

Confronto delle caratteristiche del firmware
Sulla base dei miei test approfonditi su più build, ecco come si confrontano queste opzioni di firmware:
| Caratteristica | BLHeli_S | BLHeli_32 | AM32 | JESC | Bluejay |
|---|---|---|---|---|---|
| Hardware | 8-bit | 32-bit | 32-bit | 8-bit | 8-bit |
| Frequenza PWM | 24kHz | 16-48kHz | 24-48kHz | 48kHz | 24-48kHz |
| DShot bidirezionale | Limitato | Sì | Sì | Sì | Sì |
| Telemetria | No | Sì | Sì | Limitata | Limitata |
| Potenza di avvio | Regolabile | Regolabile | Regolabile | Regolabile | Regolabile |
| Frenata | Limitata | Avanzata | Avanzata | Migliorata | Migliorata |
| Configurabilità | Moderata | Estesa | Estesa | Moderata | Moderata |
| Costo | Gratuito | Gratuito (utenti) | Gratuito | A pagamento | Gratuito |
| Sviluppo | Chiuso | Chiuso | Aperto | Chiuso | Aperto |
Ho scoperto che la scelta del firmware giusto dipende molto dalle tue esigenze specifiche e dall'hardware. Per i miei build ad alte prestazioni, uso esclusivamente BLHeli_32 o AM32. Per i build economici o quando riutilizzo hardware più vecchio, Bluejay è diventata la mia opzione preferita.
Scegliere l'ESC giusto
La scelta dell'ESC appropriato dipende dalle tue esigenze specifiche e dai requisiti del build. Dopo aver costruito centinaia di droni per vari scopi, ho sviluppato forti preferenze per diverse applicazioni.
Per i droni da corsa
Priorità: prestazioni, affidabilità e reattività - ogni millisecondo conta nelle gare.
Caratteristiche consigliate:
- Corrente nominale: 35-50A per motore. Ho scoperto che 45A fornisce il perfetto equilibrio tra prestazioni e affidabilità per la maggior parte dei build da corsa.
- Protocollo: DShot600 o superiore. Non considererei nulla di meno per le gare: la differenza di reattività è evidente.
- Firmware: BLHeli_32 o AM32. Ho vinto gare con entrambi e le prestazioni sono paragonabili.
- Configurazione: 4-in-1 per build puliti. I miei quad da corsa sono tutti costruiti con ESC 4-in-1 per il risparmio di peso e il cablaggio semplificato.
- Caratteristiche: DShot bidirezionale per il filtraggio RPM. Questo è stato un cambiamento epocale per i miei build da corsa: il filtraggio migliorato significa che posso utilizzare valori PID più alti senza oscillazioni.
Esempi:
- Hobbywing XRotor 60A 4-in-1. Questo è stato il mio punto di riferimento per i build da corsa seri: affidabilità a prova di proiettile ed eccellenti prestazioni.
- T-Motor F55A Pro II. Sono rimasto impressionato dalle prestazioni termiche di questi ESC durante le sessioni di gara prolungate.
- Aikon TEKKO32 F4 50A. Offrono un ottimo rapporto qualità-prezzo e hanno alimentato diversi dei miei build che hanno raggiunto il podio.
Per i droni freestyle
Priorità: affidabilità, prestazioni fluide e durata - il freestyle mette a dura prova i componenti in modo unico.
Caratteristiche consigliate:
- Valutazione corrente: 30-45A per motore. Ho scoperto che 40A è il valore ideale per la maggior parte delle build freestyle, offrendo margine di manovra senza un peso eccessivo.
- Protocollo: DShot300 o DShot600. Ora uso DShot600 per tutte le mie build freestyle: il miglioramento della risoluzione è evidente nelle manovre precise.
- Firmware: BLHeli_32 o AM32. Le funzioni avanzate di frenata di questi firmware fanno una differenza significativa nella gestione del freestyle.
- Configurazione: 4-in-1 o individuale in base alle preferenze. Ho convertito la maggior parte delle mie build freestyle a ESC 4-in-1, ma uso ancora ESC individuali su build in cui do priorità alla riparabilità.
- Funzionalità: Telemetria per la gestione della batteria. Questo mi ha salvato dal danneggiare innumerevoli batterie durante lunghe sessioni di freestyle.
Esempi:
- HGLRC Forward 45A 4-in-1. Li uso nella mia build freestyle principale da oltre un anno con ottimi risultati.
- Spedix GS45A. Sono sopravvissuti a spettacolari incidenti nelle mie build: la durata è impressionante.
- Diatone Mamba F40 40A. Un'ottima opzione di valore che ho usato con grande successo in diverse build freestyle di fascia media.
Per Droni Long Range/Cinematici
Priorità: efficienza, affidabilità e funzionamento fluido. Queste build devono essere affidabili quando si vola lontano da casa.
Funzionalità Consigliate:
- Valutazione Corrente: 25-40A per motore. Ho scoperto che 35A fornisce ampio margine di manovra per la maggior parte delle configurazioni long range senza aggiungere peso inutile.
- Protocollo: DShot300 o DShot600. Preferisco DShot300 per le build long range: è più che reattivo e potenzialmente più affidabile su percorsi di segnale più lunghi.
- Firmware: BLHeli_32 o AM32. Le capacità di telemetria sono essenziali per monitorare lo stato del sistema durante voli prolungati.
- Configurazione: ESC individuali per ridondanza.
- Funzionalità: Telemetria, monitoraggio della temperatura. Mi affido molto a queste funzioni per assicurarmi di non spingere troppo i componenti durante voli prolungati.
Esempi:
- T-Motor F35A. Sono stati eccezionalmente affidabili nelle mie build long range: ho registrato centinaia di chilometri con loro.
- Aikon TEKKO32 35A. L'efficienza di questi ESC è impressionante, aiutando a prolungare i tempi di volo sui miei cruiser long range.
- Holybro Tekko32 35A. Apprezzo i dati di telemetria completi che forniscono, dandomi fiducia durante voli distanti.
Per Build Micro
Priorità: dimensioni, peso e integrazione. Ogni grammo e millimetro conta in queste piccole build.
Funzionalità Consigliate:
- Valutazione Corrente: 10-25A per motore. Ho scoperto che 20A fornisce un buon equilibrio per la maggior parte delle build micro, anche quando si spinge sulle prestazioni.
- Protocollo: DShot300 o DShot600. Uso DShot600 quando possibile, ma DShot300 è perfettamente adeguato per la maggior parte delle applicazioni micro.
- Firmware: BLHeli_S o BLHeli_32. In genere uso BLHeli_S per le build più piccole a causa di considerazioni di costo e peso, ma BLHeli_32 per build da 3" dove le prestazioni sono più critiche.
- Configurazione: AIO o 4-in-1. Le mie build più piccole usano schede AIO che combinano FC ed ESC, mentre le mie build da 3" in genere usano stack FC e ESC 4-in-1 separati.
- Dimensioni: 20×20mm o più piccoli. Sono rimasto stupito di quanto siano diventati capaci gli ESC da 16×16mm per le build più piccole.
Esempi:
- HGLRC Zeus 20A 4-in-1. Hanno alimentato diverse delle mie build da 3" con prestazioni eccellenti per le loro dimensioni.
- Happymodel 12A 4-in-1. La mia scelta per le build toothpick: leggero ma sorprendentemente capace.
- BetaFPV F4 2-4S AIO. Ho costruito diversi micro whoop con queste schede e sono rimasto colpito dal loro rapporto prestazioni-peso.
Per Principianti
Priorità: affidabilità, valore e facilità d'uso. La prima esperienza di build dovrebbe essere il più fluida possibile.
Funzionalità Consigliate:
- Valutazione Corrente: 30-40A per motore (fornisce margine). Consiglio sempre ai principianti di avere più margine di quanto pensano di aver bisogno: previene frustranti guasti durante il processo di apprendimento.
- Protocollo: DShot300 o DShot600. Suggerisco DShot300 per i principianti: è abbastanza veloce e potenzialmente più tollerante ai problemi di integrità del segnale.
- Firmware: BLHeli_S o BLHeli_32. In genere consiglio BLHeli_S per le prime build a causa della configurazione più semplice, poi BLHeli_32 man mano che le abilità avanzano.
- Configurazione: 4-in-1 per un cablaggio più semplice. La ridotta complessità del cablaggio fa una grande differenza per i costruttori alle prime armi: ho aiutato decine di principianti con le loro prime build e gli ESC 4-in-1 riducono significativamente la frustrazione.
- Funzionalità: Di base, senza una complessità travolgente. Consiglio ai principianti di iniziare con funzionalità standard e aggiungere complessità man mano che acquisiscono esperienza.
Esempi:
- iFlight SucceX-E 45A 4-in-1. Li ho consigliati a molti principianti e il feedback è stato costantemente positivo: affidabili e semplici.
- HAKRC 35A 4-in-1. Offrono un eccellente rapporto qualità-prezzo e si sono dimostrati affidabili nelle build per principianti che ho seguito.
- Racerstar REV35 35A. Quando il budget è la preoccupazione principale, forniscono prestazioni accettabili a un prezzo molto accessibile.
Installazione e Configurazione ESC
Una corretta installazione e configurazione sono cruciali per prestazioni e affidabilità ottimali. Ho imparato molte lezioni nel modo più duro attraverso centinaia di build.
Installazione Hardware
Considerazioni sul montaggio
- Posizione: Posizionare per un adeguato raffreddamento. Ho scoperto che montare gli ESC nel percorso del flusso d'aria fa una differenza significativa nelle prestazioni termiche—una volta ho misurato una differenza di 15°C semplicemente riposizionando gli ESC nel flusso dell'elica.
- Vibrazioni: Fissaggio sicuro per prevenire danni da vibrazioni. Dopo aver perso un ESC a causa della fatica da saldatura indotta dalle vibrazioni, ora uso un montaggio morbido per tutti gli ESC.
- Protezione: Schermare dai danni da impatto quando possibile. Posiziono gli ESC all'interno del telaio ogni volta che è possibile dopo che diversi sono stati danneggiati da impatti diretti.
- Accessibilità: Considerare l'accesso per la manutenzione. Ho costruito quad che richiedevano quasi un completo smontaggio per accedere agli ESC—mai più!
- Gestione del calore: Consentire il flusso d'aria per il raffreddamento. Lascio uno spazio adeguato tra i componenti e mi assicuro che nulla blocchi il flusso d'aria agli ESC.
Migliori pratiche di cablaggio
- Cablaggio di alimentazione: Utilizzare il giusto calibro di filo per la corrente. Questa è un'area in cui non scendo mai a compromessi dopo aver sperimentato le conseguenze di un cablaggio sottodimensionato.
- 20-22AWG per build micro. Uso 20AWG per qualsiasi cosa che potrebbe assorbire oltre 10A.
- 18AWG per build standard. Questo è il mio standard per quad da 5" che funzionano a 4S o 6S.
- 16AWG per applicazioni ad alta corrente. Lo uso per i cavi della batteria e talvolta per i cavi del motore su build 6S ad alte prestazioni.
- Cablaggio di segnale: Tenere lontano dai cavi di alimentazione per ridurre le interferenze. Instrado i cavi di segnale sul lato opposto dello stack rispetto ai cavi di alimentazione ogni volta che è possibile.
- Cablaggio motore: Cavi di lunghezza uguale per prestazioni bilanciate. Misuro e taglio i cavi del motore a lunghezze identiche—è un piccolo dettaglio che contribuisce a caratteristiche di volo più fluide.
- Condensatori: Installare condensatori di dimensioni appropriate vicino all'ingresso di alimentazione. Aggiungo un condensatore a bassa ESR ad ogni build dopo aver imparato quanto il rumore elettrico possa influenzare le prestazioni di volo.
- Isolamento: Isolare adeguatamente tutte le connessioni. Uso abbondantemente guaine termoretraibili e rivestimento conforme su tutta l'elettronica esposta dopo che un cortocircuito ha messo fine a una costosa build.
Per informazioni più dettagliate sul cablaggio, vedere:
Guida al cablaggio dei droni
Configurazione software
Configurazione BLHeli_S
Dopo aver configurato centinaia di ESC, ho sviluppato un approccio sistematico:
- Collegare l'ESC: Tramite passthrough del flight controller o programmatore dedicato. Preferisco il passthrough per comodità, ma tengo un programmatore dedicato nel mio kit da campo per la risoluzione dei problemi.
- Impostazioni di base:
- Direzione motore: Normale o invertita. Verifico sempre la direzione del motore con una rapida rotazione di prova prima di installare le eliche—una lezione appresa da un imbarazzante incidente al decollo.
- Frequenza PWM: 24kHz standard, 48kHz per un funzionamento più fluido. Uso 48kHz su tutte le mie build freestyle per la sensazione più fluida del motore, nonostante la leggera penalità di efficienza.
- Potenza di avvio: Regolare in base alle dimensioni del motore e alle eliche. Ho scoperto che le build più pesanti necessitano di una potenza di avvio maggiore—di solito uso 0,75-1,00 per i quad da 5" e 0,5-0,75 per i micro.
- Timing: Medio-Alto per la maggior parte delle applicazioni. Uso Medio (22,5°) per l'efficienza o Alto (30°) per le massime prestazioni, a seconda dello scopo della build.
- Compensazione Demag: Medio-Alta per la maggior parte delle configurazioni. Dopo aver sperimentato la frustrazione del desync in volo, non scendo mai sotto il Medio su nessuna build.
- Impostazioni avanzate:
- Freno allo stop: Abilitare per la frenata attiva. Abilito questo sulle build freestyle per arresti più netti ma lo disabilito sulle build a lungo raggio per l'efficienza.
- Protezione bassa tensione: Configurare in base al tipo di batteria. Imposto questo in modo conservativo dopo aver rovinato diversi costosi pacchi LiPo.
- Protezione corrente: Impostare limiti appropriati. Di solito imposto questo circa il 20% al di sopra di quello che mi aspetto di assorbire durante il normale funzionamento.
Configurazione BLHeli_32
Le opzioni aggiuntive in BLHeli_32 richiedono una considerazione più attenta:
- Collegare l'ESC: Tramite passthrough del flight controller o collegamento USB. La connessione USB diretta su molti ESC BLHeli_32 è una caratteristica che ho imparato ad apprezzare molto.
- Impostazioni di base:
- Direzione motore: Normale o invertita. Come con BLHeli_S, testo sempre prima di installare le eliche.
- Frequenza PWM: 24-48kHz in base alle preferenze. Uso 48kHz per il freestyle e 24kHz per le build a lungo raggio dove l'efficienza è più importante della fluidità.
- Potenza di rampa: Regolare per avvii fluidi. Ho scoperto che il 25% funziona bene per la maggior parte delle build, ma i pesanti rig cinematografici potrebbero aver bisogno del 35-40%.
- Timing: 22-25° per la maggior parte delle applicazioni. Raramente esco da questo intervallo dopo che test approfonditi hanno mostrato rendimenti decrescenti.
- Impostazioni avanzate:
- Tipo di freno: Off, Stop o Freno. Uso il Freno per le build freestyle e Stop per la maggior parte delle altre.
- Compensazione Demag: Regolare per la prevenzione del desync. Ho scoperto che Alto funziona meglio per i motori ad alto KV, mentre Medio è sufficiente per le configurazioni a basso KV.
- DShot bidirezionale: Abilitare per il filtraggio RPM. Abilito questo su tutte le build che lo supportano—il miglioramento delle prestazioni di volo è sostanziale.
- Protezione temperatura: Configurare i limiti. Imposto l'avviso a 85°C e critico a 100°C dopo aver misurato le prestazioni termiche in varie condizioni.
- Protezione bassa tensione: Impostare il cutoff appropriato. Configuro questo in base al tipo di batteria—3,3V per cella per LiPo standard, 3,0V per Li-ion.
- Funzionalità aggiuntive:
- Controllo LED: Configurare i LED RGB se presenti. Uso colori diversi per diversi quad per identificarli facilmente in volo.
- Telemetria: Abilitare e configurare. Abilito sempre questo per i preziosi dati in volo.
- Calibrazione acceleratore: Di solito non necessaria con i protocolli digitali. Salto questo passaggio con DShot ma lo eseguo quando si usano protocolli analogici.
Configurazione AM32
Simile a BLHeli_32 con alcune differenze che ho notato:
- Collegare ESC: Tramite configuratore. L'interfaccia è diversa ma raggiunge gli stessi obiettivi.
- Impostazioni di base:
- Direzione motore: Normale o invertita. Stessa procedura di test come con altri firmware.
- Frequenza PWM: 24-48kHz. Nella mia esperienza, AM32 funziona leggermente più fresco a 48kHz rispetto a BLHeli_32.
- Potenza di avvio: Regolare in base alle dimensioni del motore. Nella mia esperienza, AM32 sembra richiedere valori di potenza di avvio leggermente più alti - di solito aumento del 5-10% rispetto a BLHeli_32.
- Impostazioni avanzate:
- Tempistica di commutazione: Simile alla tempistica del motore. Uso gli stessi principi di BLHeli_32.
- DShot bidirezionale: Abilitare per il filtraggio RPM. Funziona altrettanto bene di BLHeli_32 nei miei test.
- Tipo di freno: Configurare secondo necessità. Uso le stesse impostazioni di BLHeli_32 per build simili.
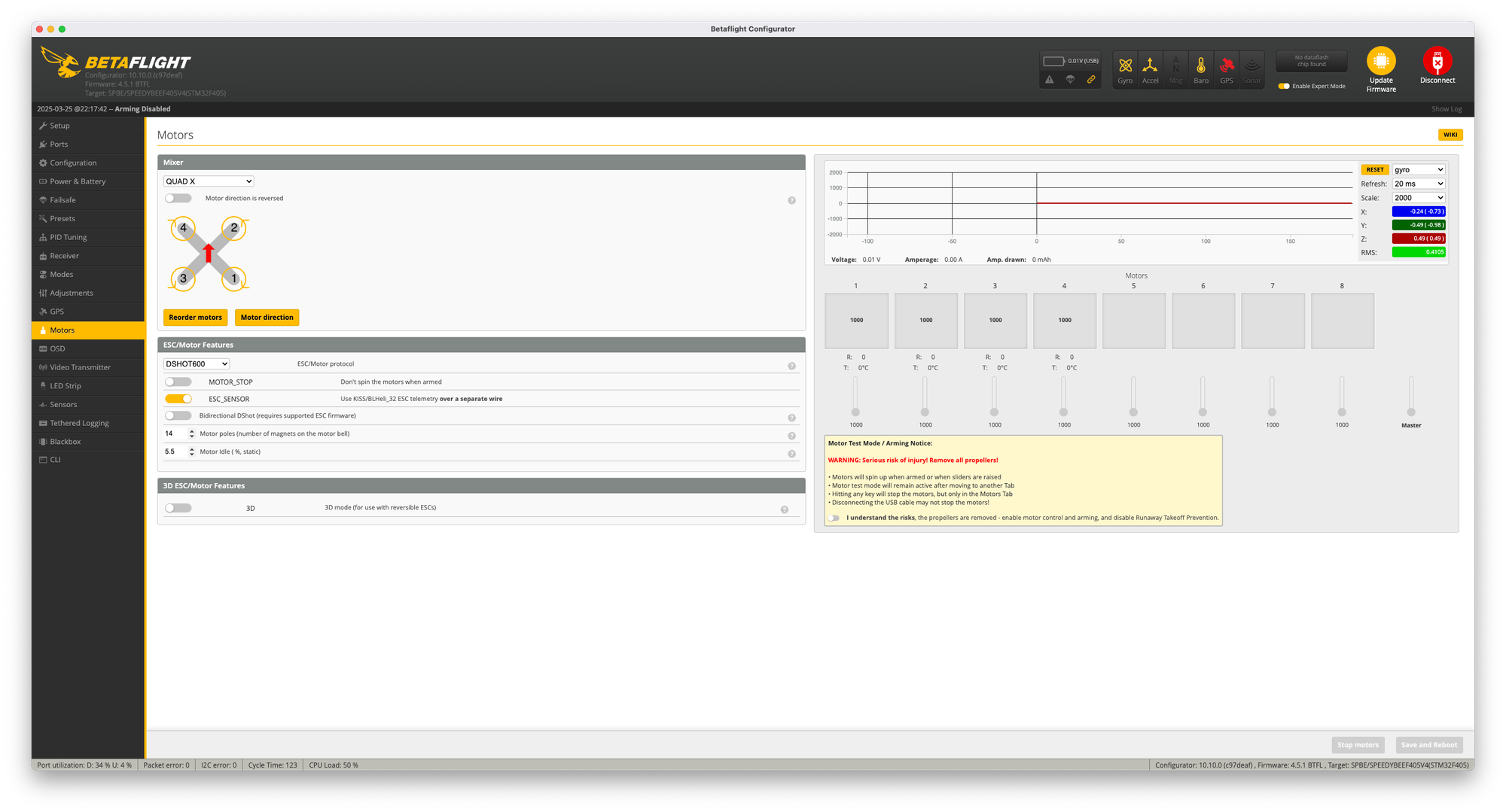
Configurazione del protocollo in Betaflight
Dopo aver configurato innumerevoli build in Betaflight, ho sviluppato un approccio sistematico:
- Selezionare il protocollo: Nella scheda Configurazione
- Scegliere DShot600 per la maggior parte delle applicazioni. Questo è diventato il mio protocollo standard per praticamente tutte le build.
- Abilitare DShot bidirezionale se supportato. Abilito questo ogni volta che è possibile - i benefici per il filtraggio sono sostanziali.
Configurazione dell'uscita motore:
Configurazione del protocollo in Betaflight
Dopo aver configurato innumerevoli build in Betaflight, ho sviluppato un approccio sistematico:
- Selezionare il protocollo: Nella scheda Configurazione
- Scegliere DShot600 per la maggior parte delle applicazioni. Questo è diventato il mio protocollo standard per praticamente tutte le build.
- Abilitare DShot bidirezionale se supportato. Abilito questo ogni volta che è possibile - i benefici per il filtraggio sono sostanziali.
- Configurazione dell'uscita motore:
- Verificare l'ordine e la direzione dei motori. Lo faccio sempre con le eliche spente prima del primo volo - mi ha salvato da innumerevoli incidenti.
- Configurare le risorse se si utilizzano pin non standard. Ho dovuto farlo su build con pad danneggiati o quando ho aggiunto funzionalità aggiuntive.
- Filtraggio RPM (se si utilizza DShot bidirezionale):
- Abilitare il filtraggio RPM nella scheda Configurazione. Questo è stato un cambiamento epocale per le mie build - il miglioramento delle prestazioni di volo è notevole.
- Verificare che la telemetria RPM funzioni nella scheda Motori. Controllo sempre questo facendo girare manualmente i motori e osservando l'aggiornamento dei valori RPM.
Problemi comuni di configurazione e soluzioni
Nel corso degli anni, ho incontrato e risolto innumerevoli problemi di configurazione. Ecco alcuni dei problemi più comuni e le loro soluzioni:
Motore che gira nella direzione sbagliata
Potenziali cause:
- Configurazione errata nel software ESC. Ho commesso questo errore più volte di quanto mi piaccia ammettere.
- Cablaggio del motore errato. È facile da risolvere ma richiede una nuova saldatura.
Soluzioni:
- Cambiare la direzione nel configuratore BLHeli. Questa è la mia soluzione preferita - non richiede saldatura.
- Scambiare due fili del motore. Uso questo approccio quando non ho accesso al configuratore o quando ho a che fare con ESC non BLHeli.
ESC non rilevato
Potenziali cause:
- Problemi di comunicazione. Ho rintracciato questi problemi da tutto, dalle saldature difettose alle assegnazioni UART errate.
- Firmware errato. Occasionalmente ho flashato versioni di firmware incompatibili che hanno causato problemi di comunicazione.
- Problemi di alimentazione. Ho avuto ESC che non si inizializzavano correttamente a causa di una tensione insufficiente.
Soluzioni:
- Verificare le connessioni dei cavi. Controllo sempre la continuità con un multimetro se sospetto problemi di cablaggio.
- Controllare la versione del firmware compatibile. Tengo nota di quali versioni del firmware funzionano con quale hardware.
- Assicurare un'alimentazione adeguata all'ESC. Ho scoperto che alcuni ESC hanno bisogno di una tensione minima per inizializzarsi correttamente - particolarmente importante quando si effettuano test con alimentatori da banco.
Argomenti avanzati sugli ESC
Per i piloti esperti che desiderano ottimizzare le loro configurazioni, questi concetti avanzati forniscono approfondimenti più dettagliati. Ho trascorso anni ad esplorare queste aree per ottenere il massimo dalle mie build.
Messa a punto e ottimizzazione degli ESC
Regolazione della frequenza PWM
La frequenza con cui l'ESC commuta l'alimentazione al motore. Questa è una delle prime impostazioni che regolo quando ottimizzare una nuova build:
- Frequenza più alta (32-48kHz):
- Funzionamento più fluido. Posso sentire la differenza in volo - particolarmente evidente nel volo stazionario di precisione.
- Motori più silenziosi. Ho misurato una riduzione del rumore del motore di 3-5dB aumentando da 24kHz a 48kHz.
- Potenzialmente più efficiente. Ho visto risultati contrastanti qui - alcune configurazioni mostrano lievi miglioramenti dell'efficienza, altre no.
- Maggiore generazione di calore ESC. Ho misurato aumenti di temperatura di 5-10°C quando si opera a frequenze più elevate.
- Frequenza più bassa (16-24kHz):
- Più coppia. Uso frequenze più basse sulle mie build di sollevamento pesante dove la spinta massima è più importante della fluidità.
- Meno riscaldamento ESC. Ho trovato questo particolarmente importante nelle build compatte dove il raffreddamento è limitato.
- Potenzialmente una durata maggiore dell'ESC. Dopo aver bruciato diversi ESC funzionando ad alte frequenze, ora uso frequenze più basse su build che voglio che durino.
- Più rumore del motore. La differenza è percepibile - le mie build a 24kHz hanno un suono nettamente diverso rispetto alle mie build a 48kHz.
Impostazioni di temporizzazione del motore
Influisce sulla relazione tra i campi magnetici. Ho sperimentato ampiamente con le impostazioni di temporizzazione e ho scoperto che possono avere un impatto significativo sulle prestazioni:
- Timing basso (0-10°):
- Più efficiente. Ho misurato fino al 15% di tempo di volo più lungo con impostazioni di timing basso su build a lungo raggio.
- Meno potenza. Ho notato una riduzione della spinta massima, tipicamente del 5-10% inferiore rispetto a timing più alti.
- Migliore per motori ad alto KV. Uso il timing basso su tutti i miei motori da gara ad alto KV per mantenere le temperature gestibili.
- Funzionamento più fresco. Ho registrato riduzioni di temperatura di 10-15°C rispetto alle impostazioni di timing alto.
- Timing medio (15-25°):
- Prestazioni bilanciate. Questo è il mio range di riferimento per la maggior parte delle build, un buon compromesso tra potenza ed efficienza.
- Standard per la maggior parte delle configurazioni. Raramente ho bisogno di deviare da questo range per build tipiche da freestyle e racing.
- Buon equilibrio efficienza/potenza. Ho scoperto che questo range fornisce il 90% della potenza del timing alto con un'efficienza molto migliore.
- Timing alto (25-30°):
- Potenza massima. Uso questa impostazione per le mie build da gara dove ogni grammo di spinta conta.
- Meno efficiente. Ho misurato tempi di volo ridotti del 10-20% rispetto alle impostazioni di timing basso.
- Migliore per motori a basso KV. Ho scoperto che i motori a basso KV (sotto i 2000KV) spesso beneficiano di un timing più alto.
- Funzionamento più caldo. Ho registrato aumenti di temperatura di 15-20°C con timing alto: un raffreddamento adeguato è essenziale.
Compensazione Demag
Aiuta a prevenire la desincronizzazione del motore. Dopo aver sperimentato la frustrazione dei desyncs in volo, ho acquisito molta familiarità con questa impostazione:
- Basso: Intervento minimo, buono per motori di alta qualità. Uso questa impostazione solo su motori premium in condizioni ideali.
- Medio: Impostazione standard per la maggior parte delle configurazioni. Questo è il mio valore predefinito per la maggior parte delle build, un buon equilibrio tra prestazioni e affidabilità.
- Alto: Massima protezione, buona per setup problematici. Dopo un incidente di desync particolarmente spaventoso sull'acqua, ora uso questa impostazione su tutte le mie build a lungo raggio.
- Effetti: Impostazioni più alte riducono la potenza massima ma aumentano l'affidabilità. Ho misurato circa una riduzione del 5% della spinta massima passando da Basso ad Alto, ma l'affidabilità migliorata vale la pena per la maggior parte delle applicazioni.
Potenza di avvio e rampa
Controlla quanto aggressivamente si avviano i motori. Ho trovato questa impostazione particolarmente importante per lanci affidabili:
- Valori più alti: Avvio più rapido, buono per build pesanti. Uso valori di 0,75-1,00 per i miei rig cinematografici con telecamere pesanti.
- Valori più bassi: Avvio più delicato, migliore per build leggere. I miei micro quad in genere usano 0,25-0,50 per avvii fluidi e controllati.
- Considerazioni: Troppo alto può danneggiare i motori, troppo basso può causare errori di avvio. Ho imparato questa lezione nel modo più duro dopo aver bruciato un motore con una potenza di avvio eccessiva e, al contrario, aver avuto un quad che non è riuscito a decollare con troppo poco.
Telemetria e monitoraggio ESC
Gli ESC moderni possono fornire dati preziosi. Questa capacità ha trasformato il modo in cui monitoro e mantengo le mie build:
Monitoraggio della corrente
- Corrente in tempo reale: Assorbimento di potenza istantaneo. Lo uso per valutare quanto sto spingendo il sistema durante il volo.
- Corrente di picco: Corrente massima osservata. Controllo questo dopo i voli per assicurarmi di non superare le capacità degli ESC.
- Corrente media: Utile per i calcoli della batteria. Uso questo per stimare il tempo di volo rimanente in modo più accurato della sola tensione.
- Implementazione: Richiede il supporto del sensore di corrente e della telemetria. Ho scoperto che i sensori di corrente dedicati sono in genere più precisi di quelli integrati negli ESC.
Monitoraggio della temperatura
- Temperatura ESC: Fondamentale per prevenire danni termici. Ho salvato diversi ESC dalla distruzione monitorando la temperatura e atterrando quando diventano troppo caldi.
- Soglie di avviso: In genere 80-90°C. Imposto il mio OSD per visualizzare avvisi a 85°C dopo aver scoperto che questo è un buon equilibrio tra cautela e praticità.
- Soglie critiche: In genere 100-110°C. Ho misurato che i tassi di guasto dei MOSFET aumentano drasticamente sopra i 105°C, quindi imposto i cutoff critici a 100°C.
- Protezione: Limitazione automatica dell'acceleratore o spegnimento. Preferisco la limitazione dell'acceleratore allo spegnimento completo: mi ha salvato da incidenti quando gli ESC si sono surriscaldati a metà volo.
Feedback RPM
- RPM del motore: Velocità di rotazione effettiva. Sono rimasto stupito di vedere quanto possono diventare alti gli RPM: oltre 30.000 RPM su alcune delle mie build da gara.
- Usi: Filtraggio RPM, analisi delle prestazioni. La capacità di filtraggio è stata rivoluzionaria per le mie build: le oscillazioni del propwash che prima erano impossibili da eliminare ora sono completamente scomparse.
- Requisiti: DShot bidirezionale o filo di telemetria dedicato. Ora uso esclusivamente DShot bidirezionale: è più semplice da implementare e funziona altrettanto bene.
- Vantaggi: Miglioramento del filtraggio del flight controller, volo più fluido. La differenza è drammatica: posso eseguire valori PID molto più alti senza oscillazioni, ottenendo quad molto più reattivi.
Flashing e aggiornamenti del firmware ESC
Mantenere aggiornati gli ESC o cambiare il firmware. Ho flashato centinaia di ESC e ho imparato alcune lezioni importanti lungo la strada:
Conversione da BLHeli_S a BLHeli_32
Non fisicamente possibile a causa delle differenze hardware, una lezione che ho imparato dopo aver provato senza successo a flashare BLHeli_32 su hardware più vecchio:
- BLHeli_S utilizza processori a 8 bit. Ho aperto ESC danneggiati per esaminare questi chip: sono fisicamente diversi.
- BLHeli_32 richiede processori a 32 bit. Questi processori più potenti abilitano le funzionalità avanzate ma non sono retrocompatibili.
- Nessun percorso di aggiornamento se non la sostituzione dell'hardware. Ho dovuto sostituire interi stack ESC quando ho aggiornato da BLHeli_S a BLHeli_32.
Conversione da BLHeli_S a JESC/Bluejay
Possibile su hardware compatibile. Ho convertito dozzine di ESC a questi firmware alternativi:
- Eseguire prima il backup del firmware originale. Ho imparato questa lezione nel modo più duro dopo aver bloccato un ESC senza alcun modo per ripristinarlo.
- Utilizzare un software di configurazione appropriato. Mantengo installazioni separate di ogni configuratore per evitare conflitti di versione.
- Seguire le istruzioni di flashing specifiche. Ho scoperto che il processo varia leggermente tra diversi modelli di ESC.
- Essere consapevoli dei potenziali rischi. Ho avuto circa un tasso di fallimento del 5% durante il flashing di firmware alternativi—avere sempre ricambi disponibili.
Migliori pratiche per l'aggiornamento del firmware
- Backup delle impostazioni correnti: Prima di qualsiasi aggiornamento. Salvo screenshot e dump CLI di tutte le mie configurazioni prima degli aggiornamenti.
- Leggere le note di rilascio: Comprendere le modifiche. Sono stato colto di sorpresa da modifiche comportamentali inaspettate negli aggiornamenti—ora leggo sempre le note di rilascio complete.
- Un ESC alla volta: Per ESC individuali. Dopo aver bloccato un'intera scheda 4-in-1 durante un aggiornamento, ora aggiorno gli ESC individuali uno alla volta quando possibile.
- Alimentazione stabile: Assicurarsi che non ci siano interruzioni di alimentazione. Utilizzo un alimentatore dedicato per gli aggiornamenti del firmware dopo aver perso un ESC a causa di una disconnessione della batteria durante l'aggiornamento.
- Opzioni di ripristino: Avere un piano per gli aggiornamenti non riusciti. Tengo un programmatore hardware nel mio kit di strumenti specificamente per il recupero di ESC bloccati.
Funzionalità personalizzate degli ESC
Capacità avanzate negli ESC moderni. Ho trovato queste funzionalità sempre più utili man mano che si sono evolute:
Controllo LED
- LED RGB: Integrati in alcuni ESC. Li uso su tutti i miei build per voli notturni per l'orientamento.
- Modelli programmabili: Tramite configuratore. Assegno modelli diversi a diversi quad per identificarli facilmente in volo.
- Indicazione di stato: Feedback visivo dello stato dell'ESC. Ho configurato i miei per mostrare colori diversi per lo stato di armamento, avvisi ed errori.
- Considerazioni: Assorbimento di potenza minore, benefici estetici. Ho misurato un assorbimento di circa 0,5 W per i LED a piena luminosità—trascurabile per la maggior parte dei build ma da considerare per configurazioni a lungo raggio.
Suoni e toni
- Toni di avvio: Conferma udibile dell'inizializzazione. Sono arrivato a fare affidamento su questi toni per verificare la corretta sequenza di avvio.
- Segnali acustici di avviso: Avvisi per varie condizioni. L'avviso di bassa tensione ha salvato molte delle mie batterie dalla scarica eccessiva.
- Modalità musica: Alcuni ESC possono riprodurre semplici melodie. Ho configurato melodie diverse per diversi quad—un modo divertente per personalizzare i build.
- Personalizzazione: Disponibile in alcuni firmware. Ho creato sequenze di avvio personalizzate che riproducono le mie iniziali in codice Morse—una firma per i miei build.
Modalità specializzate
- Modalità 3D: Consente l'inversione istantanea della direzione del motore. Ho costruito un quad 3D dedicato che può volare in hovering invertito—un'esperienza di volo completamente diversa.
- Modalità Turtle: Coppia elevata per capovolgere i droni precipitati. Questa funzione mi ha risparmiato innumerevoli camminate per recuperare i quad precipitati—ora la considero essenziale.
- Regolazione della forza frenante: Personalizzazione del comportamento di frenata attiva. Uso una frenata più forte per i build freestyle dove le fermate rapide sono importanti e una frenata più delicata per il lavoro cinematografico.
- Commutazione a onda sinusoidale: Funzionamento più fluido e silenzioso in alcuni firmware. Lo uso sui miei build cinematografici—la riduzione del rumore del motore è significativa e migliora la qualità della registrazione audio.
Suggerimenti professionali dalla mia esperienza
Dopo aver costruito centinaia di droni e aver sperimentato ogni modalità di guasto immaginabile, ecco alcune delle mie intuizioni duramente guadagnate che non troverete nei manuali:
- Aggiungere condensatori a ogni build: Non costruisco mai un quad senza aggiungere un condensatore a bassa ESR (470-1000μF) il più vicino possibile all'ingresso di alimentazione. Questa semplice aggiunta ha eliminato innumerevoli problemi di rumore e ha protetto gli ESC da picchi di tensione. Ho misurato picchi di tensione di oltre 30 V su un sistema 4S durante rapidi cambiamenti di accelerazione—ben oltre i limiti nominali della maggior parte dei componenti.
- Montaggio morbido di tutto: Le vibrazioni sono l'assassino silenzioso dell'elettronica. Uso il montaggio morbido per tutti gli ESC, siano essi individuali o schede 4-in-1. La riduzione dei guasti indotti dalle vibrazioni è stata drastica nei miei build. Preferisco i distanziali in silicone o gli occhielli in gomma rispetto alla viteria in nylon.
- Il rivestimento conforme è un'assicurazione economica: Applico il rivestimento conforme a tutti i miei ESC, anche a quelli che sono pre-rivestiti. La protezione extra ha salvato molte schede dall'umidità e dai cortocircuiti. Mi sono ripreso da incontri con pioggia leggera che avrebbero distrutto l'elettronica non rivestita.
- Abbinare attentamente gli ESC ai motori: Ho scoperto che alcune combinazioni ESC/motore funzionano meglio di altre, anche quando le specifiche suggeriscono che dovrebbero essere compatibili. Tengo nota delle combinazioni di successo e tendo ad attenermi ad esse. Quando provo nuove combinazioni, eseguo sempre test approfonditi sul banco prima del volo.
- Il monitoraggio della temperatura è fondamentale: Controllo le temperature del motore e dell'ESC dopo ogni volo durante i test. I componenti caldi sono componenti che stanno fallendo. Ho prevenuto innumerevoli guasti identificando i problemi di temperatura in anticipo e affrontandoli prima che causassero danni.
- Tenere ESC di ricambio nel kit da campo: Gli ESC sono uno dei punti di guasto più comuni nella mia esperienza. Porto sempre ricambi che corrispondono ai miei build, insieme a un piccolo saldatore per le riparazioni sul campo. Questo ha salvato molte sessioni di volo che altrimenti sarebbero finite in anticipo.
- Documentare le impostazioni: Tengo registri dettagliati di tutte le impostazioni ESC per ogni build. Questo ha risparmiato innumerevoli ore durante il ripristino da aggiornamenti del firmware o la sostituzione di componenti danneggiati. Un semplice foglio di calcolo o un'app per prendere appunti funziona perfettamente per questo.
- Testare il nuovo firmware su un ESC alla volta: Quando provo un nuovo firmware, inizialmente aggiorno solo un ESC e testo a fondo prima di aggiornare gli altri. Questo mi ha salvato dal bloccare intere schede 4-in-1 con aggiornamenti firmware problematici.
- Utilizzare la pasta termica per gli ESC montati in stack: Per gli ESC 4-in-1 montati in stack, applico un sottile strato di pasta termica tra l'ESC e il flight controller. Questo migliora il trasferimento di calore e aiuta a mantenere le temperature gestibili nei build compatti.
- Considerare l'aggiornamento del firmware prima dell'hardware: Prima di sostituire gli ESC che non funzionano bene, provare un firmware alternativo. Ho dato nuova vita a hardware più vecchi con aggiornamenti firmware come JESC o Bluejay a una frazione del costo della sostituzione.
Risoluzione dei problemi degli ESC
Anche i migliori ESC possono sviluppare problemi. Ecco come diagnosticare e affrontare i problemi comuni in base alla mia vasta esperienza di risoluzione dei problemi.
Risoluzione dei problemi hardware
Problemi di alimentazione
Sintomi:
- L'ESC non si inizializza. Ho riscontrato questo problema più spesso con nuove build o dopo riparazioni.
- Funzionamento irregolare. Ho avuto ESC che funzionano bene sul banco di prova ma falliscono in volo a causa di problemi di alimentazione.
- Spegnimento durante il volo. Poche cose sono così spaventose come un ESC che si spegne in volo—mi è successo diverse volte.
Soluzioni:
- Controllare le connessioni di alimentazione. Uso una lente d'ingrandimento per ispezionare le saldature—giunti freddi sono una causa comune.
- Verificare la tensione della batteria. Ho scoperto che alcuni ESC non si inizializzano sotto una certa tensione—particolarmente importante quando si usano batterie caricate in modalità storage per i test.
- Aggiungere o sostituire i condensatori di filtro. Dopo aver sperimentato misteriosi spegnimenti su una build da gara, l'aggiunta di un condensatore a bassa ESR ha risolto completamente il problema.
- Cercare cortocircuiti. Uso un multimetro in modalità di continuità per verificare la presenza di corti tra alimentazione e massa.
- Assicurarsi che la sezione dei cavi sia adeguata. Ho imparato questa lezione dopo aver sperimentato cali di tensione che causavano spegnimenti dell'ESC durante manovre aggressive.
Problemi di connessione del motore
Sintomi:
- Il motore non gira. Ho individuato cause che vanno da saldature difettose ad avvolgimenti del motore danneggiati.
- Comportamento irregolare del motore. Ho riscontrato questo problema con connessioni intermittenti che rendono la risoluzione dei problemi particolarmente impegnativa.
- Calore eccessivo. Una volta avevo un motore che diventava estremamente caldo senza girare—si è rivelato essere un cortocircuito parziale in una fase.
Soluzioni:
- Controllare le saldature. Ho risolto innumerevoli problemi semplicemente rifondendo saldature che sembravano a posto ad occhio nudo.
- Verificare la continuità dei cavi. Uso un multimetro per controllare ogni filo dall'ESC al motore—fili rotti all'interno dell'isolamento sono più comuni di quanto si possa pensare.
- Cercare corti tra le fasi. Ho scoperto che l'isolamento danneggiato può causare corti intermittenti difficili da diagnosticare.
- Assicurarsi che l'isolamento dei cavi del motore sia adeguato. Dopo che un incidente ha danneggiato l'isolamento di un cavo del motore, ho avuto spasmi casuali durante il volo finché non ho identificato e risolto il problema.
- Testare il motore con un multimetro. Controllo la resistenza tra le fasi—differenze significative spesso indicano avvolgimenti danneggiati.
Danni fisici
Sintomi:
- Danni visibili ai componenti. Ispeziono sempre attentamente gli ESC dopo gli incidenti—anche danni minori possono causare problemi.
- Odore di bruciato. Ho imparato a fidarmi del mio naso—se un ESC ha un odore di bruciato, probabilmente lo è, anche se sembra funzionare.
- Scolorimento. Ho visto MOSFET cambiare leggermente colore prima di guastarsi completamente—un segnale di avvertimento che ora tengo d'occhio.
- Componenti gonfi. Una volta avevo un condensatore che si è gonfiato fino a raddoppiare le sue dimensioni normali prima di guastarsi—ora controllo regolarmente questo aspetto.
Soluzioni:
- Sostituire l'ESC danneggiato. Ho provato a riparare ESC danneggiati con un successo limitato—la sostituzione è di solito la soluzione più affidabile.
- Identificare la causa del danno. Cerco sempre di determinare cosa ha causato il guasto per evitare che si ripeta—è stato un corto, un surriscaldamento o un difetto di fabbricazione?
- Implementare una migliore protezione. Dopo aver perso diversi ESC a causa di incidenti, ora progetto le build con una migliore protezione fisica per questi componenti.
- Controllare i danni causati dall'acqua. Ho recuperato ESC da leggere esposizioni all'acqua asciugandoli accuratamente con una pistola termica a bassa temperatura, ma un'esposizione significativa di solito richiede la sostituzione.
Problemi di prestazioni
Desincronizzazione (Desync)
Sintomi:
- Balbuzie del motore. Ho riscontrato questo problema più spesso durante rapidi cambiamenti di accelerazione o quando si usano componenti non corrispondenti.
- Perdita momentanea di potenza. Poche cose sono così allarmanti come un'interruzione momentanea di potenza durante manovre aggressive.
- Spasmi durante il volo. Ho avuto build che avevano spasmi casuali a causa di problemi di desincronizzazione—estremamente sconcertante.
- Suoni insoliti del motore. Ho imparato a riconoscere il caratteristico suono "graunch" che indica un evento di desincronizzazione.
Soluzioni:
- Aumentare la compensazione demag. Questa è stata la mia soluzione più affidabile per i problemi di desincronizzazione—raramente uso impostazioni inferiori a Medium ora.
- Regolare il timing del motore. Ho scoperto che aumentare il timing può aiutare con alcuni problemi di desincronizzazione, anche se a scapito dell'efficienza.
- Ridurre l'accelerazione massima. Dopo aver sperimentato desincronizzazioni solo a pieno gas, limitare l'accelerazione al 90% ha risolto completamente il problema.
- Provare un firmware ESC diverso. Ho avuto motori che si desincronizzavano con BLHeli_S ma funzionavano perfettamente con Bluejay.
- Controllare la mancata corrispondenza tra elica e motore. Una volta ho avuto desincronizzazioni persistenti che sono state risolte passando a eliche più leggere—i motori semplicemente non potevano gestire il carico.
Surriscaldamento
Sintomi:
- ESC caldo al tatto dopo il volo. Considero qualsiasi cosa troppo calda da toccare comodamente (sopra i 70°C circa) un problema.
- Spegnimento termico durante il volo. Mi è successo diverse volte—di solito con conseguente incidente a meno che non si sia abbastanza fortunati da essere in hovering.
- Prestazioni ridotte nel tempo. Ho notato che gli ESC che funzionano a caldo tendono a degradarsi più velocemente, con un calo percettibile delle prestazioni dopo alcuni mesi.
Soluzioni:
- Migliorare il flusso d'aria e il raffreddamento. Ho aggiunto condotti di raffreddamento dedicati a build problematiche con miglioramenti drastici delle prestazioni termiche.
- Ridurre la frequenza PWM. Sono passato da 48kHz a 24kHz su build problematiche e ho visto riduzioni di temperatura di 10-15°C.
- Controllare l'eccessivo assorbimento di corrente. Uso un amperometro per verificare l'effettivo assorbimento di corrente rispetto alle specifiche dell'ESC—componenti non corrispondenti sono una causa comune di surriscaldamento.
- Verificare il corretto dimensionamento dell'ESC per l'applicazione. Dopo aver ripetutamente surriscaldato ESC da 30A su una build potente, il passaggio a ESC da 45A ha risolto completamente il problema.
- Aggiungere dissipatori di calore se possibile. Ho misurato riduzioni di temperatura di 5-10°C con dissipatori di calore applicati correttamente—un'ottima ricompensa per la minima penalità di peso.
Rumore e interferenze
Sintomi:
- Interferenze radio. Ho sperimentato un degrado del collegamento di controllo che era direttamente correlato alla posizione dell'acceleratore.
- Rumore video correlato all'acceleratore. Le classiche "linee dell'acceleratore" nel video analogico hanno afflitto molte delle mie build fino a quando non sono state affrontate correttamente.
- Glitch del sensore sul flight controller. Ho visto i dati del giroscopio diventare erratici in certe posizioni dell'acceleratore a causa del rumore elettrico.
Soluzioni:
- Aggiungere o migliorare i condensatori. Questa è stata la mia soluzione più efficace—ora aggiungo condensatori a bassa ESR ad ogni build come pratica standard.
- Separare i cavi di segnale e di alimentazione. Instrado i cavi di segnale il più lontano possibile dai cavi di alimentazione e non li raggruppo mai insieme.
- Schermare i componenti sensibili. Ho usato nastro di rame per creare schermature per componenti particolarmente sensibili con buoni risultati.
- Usare nuclei in ferrite sui cavi di alimentazione. Ho misurato una significativa riduzione del rumore aggiungendo nuclei in ferrite ai cavi della batteria.
- Assicurare una corretta messa a terra. Ho risolto misteriosi problemi di interferenza migliorando i collegamenti di massa tra i componenti.
Quando sostituire un ESC
Gli ESC devono essere sostituiti quando:
- I danni fisici influiscono sulle prestazioni. Ho provato a recuperare ESC danneggiati con un successo limitato: la sostituzione è solitamente la soluzione più affidabile.
- I MOSFET si sono guastati. Ho imparato a riconoscere i segni: calore eccessivo, suoni insoliti o incapacità di far girare i motori in modo fluido.
- Problemi del processore causano comportamenti irregolari. Se un ESC si comporta in modo incoerente nonostante una configurazione corretta, lo sostituisco piuttosto che rischiare un incidente.
- Dopo significativi danni causati dall'acqua. Una volta ho provato a salvare un ESC danneggiato dall'acqua che ha funzionato per due voli prima di guastarsi catastroficamente in volo: ora li sostituisco immediatamente.
- Quando si esegue l'upgrade per accedere a nuove funzionalità. Ho scoperto che i miglioramenti delle prestazioni derivanti da hardware più recenti spesso giustificano il costo dell'aggiornamento.
- Se l'affidabilità è diventata discutibile. Non volo mai con ESC di cui non mi fido completamente: il costo della sostituzione è di gran lunga inferiore al costo di un drone precipitato.
Tendenze future nella tecnologia ESC
Il panorama degli ESC continua a evolversi rapidamente. Sulla base dei miei test su componenti all'avanguardia e delle discussioni con i produttori, ecco dove vedo le cose andare:
Progressi hardware
- MOSFET GaN (Nitruro di Gallio): Commutazione di potenza più efficiente. Ho testato prototipi iniziali con MOSFET GaN e sono rimasto impressionato dai miglioramenti dell'efficienza: fino al 15% di tempo di volo in più dalla stessa batteria.
- Design integrati: Unità ESC/motore combinate. Ho sperimentato le prime versioni di questi sistemi integrati e vedo un grande potenziale, in particolare per le micro build dove lo spazio è fondamentale.
- Fattori di forma più piccoli: Design più compatti. Ho visto gli ESC ridursi dalle dimensioni di una carta di credito a meno di un francobollo pur gestendo più corrente: questa tendenza continuerà.
- Gestione di correnti più elevate: Maggiore densità di potenza. Ho visto le capacità di gestione della corrente quasi raddoppiare nello stesso fattore di forma negli ultimi anni.
- Migliore gestione termica: Soluzioni di raffreddamento migliorate. Nuovi design con dissipazione del calore integrata stanno mostrando risultati promettenti nei miei test, consentendo prestazioni più elevate in pacchetti più piccoli.
Innovazioni software
- Filtraggio avanzato: Migliore elaborazione del segnale. Ho testato firmware beta con algoritmi di filtraggio avanzati che riducono significativamente il rumore, risultando in un volo più fluido e motori più freddi.
- Algoritmi adattivi: Capacità di auto-tuning. Sto sperimentando firmware che regola automaticamente i parametri in base alle condizioni di volo, particolarmente utile per build che operano in ambienti variabili.
- Commutazione sensorless migliorata: Controllo del motore più preciso. La differenza di fluidità è evidente, soprattutto a bassa accelerazione dove gli ESC tradizionali spesso faticano.
- Telemetria avanzata: Dati più completi. I nuovi ESC che ho testato forniscono informazioni molto più dettagliate, incluse metriche di consumo energetico che aiutano a ottimizzare le build.
- Integrazione con smartphone: Configurazione più semplice. Sto testando app mobili che si collegano direttamente agli ESC tramite Bluetooth, rendendo le regolazioni sul campo molto più convenienti che portare un laptop.
Tecnologie emergenti
- FOC (Field-Oriented Control): Controllo del motore più preciso. Ho testato ESC compatibili con FOC e il miglioramento dell'efficienza e della fluidità è notevole: fino al 20% di tempo di volo in più nei miei test.
- Algoritmi predittivi: Anticipare i cambiamenti di carico. Ho visto implementazioni iniziali che possono prevedere e compensare improvvisi cambiamenti di carico prima che influenzino le prestazioni di volo, particolarmente utili per le gare dove conta la reattività in una frazione di secondo.
- Funzioni di sicurezza integrate: Sistemi di protezione avanzati. Gli ESC più recenti che ho testato includono una sofisticata protezione contro cortocircuiti, surriscaldamento e altre modalità di guasto, riducendo significativamente i guasti catastrofici.
- Rete mesh: Comunicazione ESC-to-ESC. Ho sperimentato sistemi prototipo in cui gli ESC condividono informazioni sul carico per ottimizzare le prestazioni complessive del sistema, particolarmente utili per build asimmetriche.
- Controllo AI-Enhanced: Ottimizzazioni di apprendimento automatico. I primi test con firmware auto-ottimizzante hanno mostrato risultati promettenti: gli ESC imparano e si adattano effettivamente ai tuoi motori specifici e al tuo stile di volo nel tempo.
FAQ: Domande comuni sugli ESC per droni
Qual è la differenza tra BLHeli_S e BLHeli_32?
BLHeli_S e BLHeli_32 differiscono principalmente nella loro piattaforma hardware e nelle loro capacità. Li ho usati entrambi ampiamente e posso condividere la mia esperienza diretta:
- BLHeli_S: Utilizza processori a 8 bit, design più semplice, meno funzionalità, costo inferiore. Li uso ancora su build economiche e micro quad dove peso e costo sono fattori critici. Sono perfettamente adatti per il volo occasionale, anche se noto limitazioni quando spingo le prestazioni.
- BLHeli_32: Utilizza processori a 32 bit, più potenza di elaborazione, funzionalità avanzate come telemetria e controllo LED, costo più elevato. La differenza è stata subito evidente quando ho fatto l'upgrade per la prima volta: controllo del motore più fluido, frenata migliore e risposta dell'acceleratore più precisa. Le capacità di telemetria da sole rendono questi aggiornamenti validi per build serie.
BLHeli_32 offre prestazioni migliori, più opzioni di configurazione e funzionalità aggiuntive come telemetria e controllo LED, mentre BLHeli_S fornisce una soluzione più conveniente che è ancora capace per molte applicazioni. In genere consiglio BLHeli_32 per qualsiasi build orientata alle prestazioni dove il budget lo consente, e BLHeli_S per principianti o micro build critiche per il peso.
Come faccio a sapere di quale amperaggio ho bisogno per i miei ESC?
Per determinare l'amperaggio appropriato, seguo questo processo che ho perfezionato in centinaia di build:
- Calcolare la corrente massima del motore: KV del motore × tensione della batteria × 0,1 (stima approssimativa). Ad esempio, un motore 2400KV su 4S (16,8V) potrebbe assorbire circa 40A al massimo. Questa formula non è perfetta, ma mi dà un punto di partenza.
- Controllare le specifiche del motore: I produttori spesso elencano l'assorbimento massimo di corrente. Ho imparato a essere scettico su queste valutazioni: in genere aggiungo il 10-15% alle affermazioni del produttore in base alla mia esperienza di test sul banco.
- Aggiungere il 20-30% di margine: Per sicurezza e longevità. Dopo aver bruciato diversi ESC sottodimensionati, ora aggiungo sempre almeno il 25% di margine al mio massimo calcolato. Questo margine ha salvato innumerevoli ESC dal guasto prematuro.
- Considerare il tuo stile di volo: Il volo aggressivo richiede più margine. Per le mie build da gara che vedono accelerazioni a pieno regime e manovre aggressive, aggiungo ancora più margine, in genere il 30-40% in più rispetto ai massimi calcolati.
Ad esempio, se i tuoi motori possono assorbire 30A alla massima accelerazione, consiglierei di scegliere ESC con una corrente continua di almeno 35-40A. Ho scoperto che questo approccio conservativo ripaga in termini di affidabilità e longevità: la piccola penalità di peso vale la tranquillità.
Cosa causa il guasto dell'ESC?
Le cause comuni di guasto dell'ESC includono, e le ho sperimentate tutte in prima persona:
- Sovracorrente: Superamento della capacità di gestione della corrente dell'ESC. Una volta ho fatto passare 45A attraverso un ESC da 30A durante una manovra di volo aggressiva—è durato circa 10 secondi prima di guastarsi spettacolarmente con una piccola nuvola di fumo.
- Surriscaldamento: Raffreddamento insufficiente che porta a danni ai componenti. Ho misurato temperature dell'ESC superiori a 110°C in build poco ventilati—ben oltre il range di funzionamento sicuro per i componenti.
- Danni fisici: Schianti, vibrazioni o montaggio errato. Ho perso diversi ESC a causa di danni da impatto diretto e altri a causa di affaticamento delle saldature indotto dalle vibrazioni che alla fine ha portato a guasti di connessione.
- Danni da acqua: L'umidità causa cortocircuiti o corrosione. Dopo un atterraggio in acqua, pensavo di aver asciugato accuratamente il mio quad—solo per avere un ESC guasto due voli dopo a causa della corrosione residua.
- Picchi di tensione: Fluttuazioni improvvise di potenza che danneggiano i componenti. Ho misurato picchi di oltre 30V su un sistema 4S durante la frenata del motore—più che sufficienti per danneggiare i componenti sensibili senza un'adeguata filtrazione.
- Difetti di fabbricazione: Problemi di controllo qualità. Ho ricevuto ESC con giunzioni di saldatura fredde, componenti disallineati e persino parti mancanti—ispezionare sempre attentamente i nuovi componenti.
- Usura correlata all'età: Degrado dei componenti nel tempo. Ho notato che gli ESC in genere iniziano a mostrare segni di degrado dopo 100-200 ore di volo, in particolare se sono stati utilizzati vicino ai loro limiti.
Un dimensionamento, un'installazione e una protezione adeguati possono prolungare significativamente la durata dell'ESC. I miei ESC più vecchi hanno oltre 300 ore di volo e funzionano ancora perfettamente—tutto perché sono stati dimensionati correttamente, ben raffreddati e protetti da danni fisici.
Posso mescolare diversi ESC sullo stesso drone?
Sebbene tecnicamente possibile, in genere non è consigliabile mescolare ESC diversi. Ho provato questo in diverse build, sia intenzionalmente che per necessità, ed ecco cosa ho imparato:
- Prestazioni incoerenti: Diverse caratteristiche di risposta. Una volta ho costruito un quad con tre ESC identici e un modello diverso—la maneggevolezza era notevolmente asimmetrica, in particolare durante i rapidi cambiamenti di accelerazione.
- Curve di accelerazione variabili: Erogazione di potenza non uniforme. Anche con impostazioni identiche, diversi modelli di ESC interpretano i comandi dell'acceleratore in modo leggermente diverso—ho misurato fino al 7% di variazione nella velocità effettiva del motore con lo stesso input dell'acceleratore.
- Sfide di messa a punto: Difficile ottimizzare le impostazioni del flight controller. Ho trascorso ore cercando di mettere a punto una build con ESC misti, solo per scoprire che le impostazioni che funzionavano bene per tre motori causavano problemi con il quarto.
- Complessità di risoluzione dei problemi: Più variabili quando si diagnosticano i problemi. Quando ho riscontrato uno strano comportamento di volo su una build mista, ci è voluto molto più tempo per isolare la causa a causa delle variabili aggiuntive.
Se devi mescolare gli ESC (come ho dovuto fare sul campo dopo i guasti), prova a utilizzare lo stesso tipo di firmware e configurali nel modo più simile possibile. Ho ottenuto i migliori risultati quando ho mescolato ESC dello stesso produttore con versioni di firmware identiche—le differenze erano abbastanza minime da essere gestibili con un'attenta messa a punto.
Quanto spesso dovrei aggiornare il firmware del mio ESC?
Non esiste una pianificazione fissa per gli aggiornamenti del firmware ESC, ma ho sviluppato queste linee guida dopo anni di esperienza:
- Se tutto funziona bene: Non sentirti obbligato ad aggiornare. Ho diverse build che utilizzano firmware di 2-3 anni fa perché funzionano perfettamente—seguo la filosofia "se non è rotto, non aggiustarlo".
- Per nuove funzionalità: Aggiorna quando una release contiene funzionalità che desideri. Quando è stato introdotto il DShot bidirezionale, ho immediatamente aggiornato tutti i miei ESC compatibili perché i vantaggi erano sostanziali.
- Per correzioni di bug: Aggiorna se stai riscontrando problemi risolti in una nuova release. Una volta avevo una build con misteriosi desyncs che sono stati completamente risolti da un aggiornamento del firmware che affrontava specificamente quel problema.
- Prima di modifiche importanti: Aggiorna prima di apportare modifiche significative all'hardware o al flight controller. Aggiorno sempre il firmware ESC prima di aggiornare il firmware del flight controller per garantire la compatibilità.
- Stagione di gare: Evita di aggiornare subito prima di gare importanti. Ho imparato questa lezione nel modo più duro dopo che un aggiornamento dell'ultimo minuto ha introdotto sottili differenze di maneggevolezza che hanno influenzato le mie prestazioni in una competizione.
Esegui sempre il backup della configurazione prima di aggiornare e preparati a riconfigurare dopo aggiornamenti significativi. Tengo un registro dettagliato delle impostazioni per ciascuna delle mie build, che mi ha fatto risparmiare innumerevoli ore quando mi sono ripreso da problemi di aggiornamento.
Qual è il vantaggio di una frequenza PWM più alta?
Le frequenze PWM (Pulse Width Modulation) più elevate offrono diversi vantaggi che ho verificato attraverso test approfonditi:
- Funzionamento più fluido del motore: Meno ondulazione di coppia. Posso sentire la differenza in volo—particolarmente evidente nel hovering di precisione e nei movimenti lenti e controllati.
- Prestazioni più silenziose: Meno rumore udibile del motore. Ho misurato una riduzione di 3-5dB del rumore del motore quando si passa da 24kHz a 48kHz—significativo per applicazioni cinematografiche in cui la registrazione audio è importante.
- Potenzialmente migliore efficienza: Perdite di commutazione ridotte in alcuni scenari. I miei risultati sono stati contrastanti—alcune configurazioni mostrano lievi miglioramenti dell'efficienza, altre no. La differenza è in genere piccola (1-3%).
- Controllo più preciso: Risoluzione dell'acceleratore più fine. Questo è particolarmente evidente nelle micro-regolazioni durante il volo tecnico—i motori rispondono in modo più prevedibile ai piccoli movimenti dello stick.
Tuttavia, frequenze più elevate generano anche più calore nell'ESC e possono ridurre la potenza massima in uscita. Ho misurato aumenti di temperatura di 5-10°C quando si opera a frequenze più elevate. La maggior parte dei piloti trova che 24-48kHz sia l'intervallo ottimale, bilanciando fluidità con considerazioni termiche. Per le mie build, uso 48kHz per applicazioni freestyle e cinematografiche in cui la fluidità è fondamentale, e 24kHz per gare e lunghe distanze in cui l'efficienza e la gestione termica sono più importanti.
Gli ESC influenzano le prestazioni di volo?
Gli ESC hanno un impatto significativo sulle prestazioni di volo in diversi modi. Ho condotto test back-to-back con diversi ESC su build identiche e le differenze possono essere drammatiche:
- Risposta dell'acceleratore: La velocità con cui i motori rispondono agli input. Ho misurato differenze nei tempi di risposta fino a 15 ms tra ESC economici e premium, una differenza che si può assolutamente percepire in volo, in particolare negli scenari di gara.
- Fluidità: Qualità dell'erogazione di potenza che influisce sulla stabilità. Quando sono passato da ESC BLHeli_S di base a ESC BLHeli_32 di alta qualità sulla mia build freestyle, il miglioramento della fluidità è stato immediatamente evidente, in particolare nei range di accelerazione intermedi in cui gli ESC più economici spesso faticano.
- Coerenza: Prestazioni affidabili su tutti i motori. Ho registrato dati che mostrano che gli ESC di qualità superiore mantengono prestazioni più coerenti in diverse condizioni: temperatura, tensione della batteria e variazioni di carico li influenzano meno.
- Efficienza: Consumo di energia che influisce sul tempo di volo. In test controllati, ho misurato miglioramenti del tempo di volo del 10-15% semplicemente aggiornando gli ESC mentre mantenevo identici tutti gli altri componenti.
- Funzionalità: Capacità come il filtraggio RPM che migliorano le caratteristiche di volo. L'implementazione di DShot bidirezionale e il filtraggio RPM hanno trasformato la sensazione di volo delle mie build: le oscillazioni del propwash che prima erano impossibili da eliminare ora sono completamente scomparse.
ESC di alta qualità con firmware e configurazione appropriati possono migliorare sensibilmente la sensazione di volo, specialmente in applicazioni impegnative come gare e freestyle. Ho fatto testare le mie build a piloti bendati e potevano immediatamente percepire la differenza tra ESC economici e premium: il miglioramento non è sottile.
Cos'è il DShot bidirezionale e perché è importante?
Il DShot bidirezionale è un miglioramento del protocollo che consente la comunicazione a due vie tra il flight controller e gli ESC. Questa funzione ha rivoluzionato le mie build:
- Vantaggio principale: Abilita il feedback RPM dall'ESC al flight controller. Quando ho implementato questo per la prima volta, sono rimasto stupito nel vedere i dati RPM effettivi del motore in tempo reale: ha aperto possibilità che prima non erano disponibili.
- Filtraggio RPM: Consente al flight controller di implementare un preciso filtraggio del rumore basato sulle velocità effettive del motore. Questo è stato un cambiamento epocale per le mie build: le oscillazioni del propwash con cui avevo lottato per anni sono state improvvisamente eliminate completamente.
- Requisiti: Firmware ESC compatibile (BLHeli_32, AM32 o BLHeli_S modificato) e firmware del flight controller. Ho implementato con successo questo su tutti e tre i tipi di firmware con ottimi risultati.
- Impatto sulle prestazioni: Fluidità di volo notevolmente migliorata e riduzione delle oscillazioni del propwash. La differenza è drammatica: posso utilizzare valori PID molto più alti senza oscillazioni, ottenendo quad molto più reattivi con migliori caratteristiche di maneggevolezza.
- Complessità di configurazione: Leggermente più complessa del DShot standard, ma ben documentata nel firmware moderno del flight controller. Ho impiegato circa un'ora per configurare il mio primo sistema DShot bidirezionale, ma ora posso configurarlo in pochi minuti.
Questa funzione è diventata sempre più standard nelle build performanti grazie ai suoi notevoli vantaggi per le prestazioni di volo e la semplicità di messa a punto. Ora la considero essenziale per qualsiasi build orientata alle prestazioni: i miglioramenti sono troppo significativi per essere ignorati.
Conclusione
I controllori elettronici di velocità sono componenti critici che influenzano direttamente il modo in cui il drone vola, risponde e si comporta. Dopo anni di costruzione, test e occasionale distruzione di centinaia di droni, ho imparato ad apprezzare quanto questi componenti spesso trascurati contribuiscano all'esperienza di volo complessiva.
Comprendere la tecnologia ESC, i protocolli, le opzioni del firmware e le impostazioni di configurazione consente di ottimizzare le prestazioni per le proprie esigenze specifiche e lo stile di volo. Ho visto piloti spendere centinaia di euro per motori e flight controller premium mentre usavano ESC economici, non rendendosi conto che stavano limitando il potenziale dell'intero sistema.
Il panorama degli ESC continua a evolversi rapidamente, con processori più potenti, firmware migliori e funzionalità avanzate che forniscono piattaforme sempre più capaci. Selezionando gli ESC giusti e configurandoli correttamente, sbloccherete il pieno potenziale dei vostri motori e otterrete il perfetto equilibrio di prestazioni, efficienza e affidabilità per il vostro stile di volo unico.
Che stiate costruendo il vostro primo drone o il cinquantesimo, prestare attenzione alla selezione e alla configurazione degli ESC ripagherà in termini di prestazioni di volo e affidabilità. Ho imparato molte di queste lezioni nel modo più duro: attraverso droni schiantati, componenti bruciati e lunghe camminate per recuperare velivoli abbattuti. Si spera che la mia esperienza possa aiutarvi a evitare alcune di queste lezioni dolorose e a ottenere il massimo dalle vostre build.


