Contrôleurs de vitesse pour drones : principes et fonctionnement
Les contrôleurs de vitesse électroniques (ESC) sont le lien vital entre votre contrôleur de vol et les moteurs, traduisant les commandes numériques en une alimentation électrique précise qui maintient votre drone dans les airs. Après des années de construction et de test de centaines de drones, j'en suis venu à apprécier que ces dispositifs sophistiqués sont bien plus que de simples pilotes de moteur - ce sont des composants riches en fonctionnalités avec leurs propres processeurs, micrologiciels et capacités qui peuvent faire ou défaire votre expérience de vol. J'ai appris à mes dépens qu'une défaillance de l'ESC signifie plus qu'un simple crash de drone ; cela signifie souvent une longue marche à travers un terrain difficile pour récupérer ce qu'il reste de votre fierté et de votre joie.
Ce guide complet explore la technologie des ESC, les protocoles, les options de micrologiciels, les critères de sélection et les fonctionnalités avancées basées sur ma vaste expérience pratique. Je partagerai non seulement les spécifications techniques, mais aussi les idées pratiques que j'ai acquises grâce à d'innombrables constructions, crashs et séances de dépannage pour vous aider à comprendre et à optimiser ce composant essentiel de votre drone FPV.
Introduction aux contrôleurs de vitesse électroniques
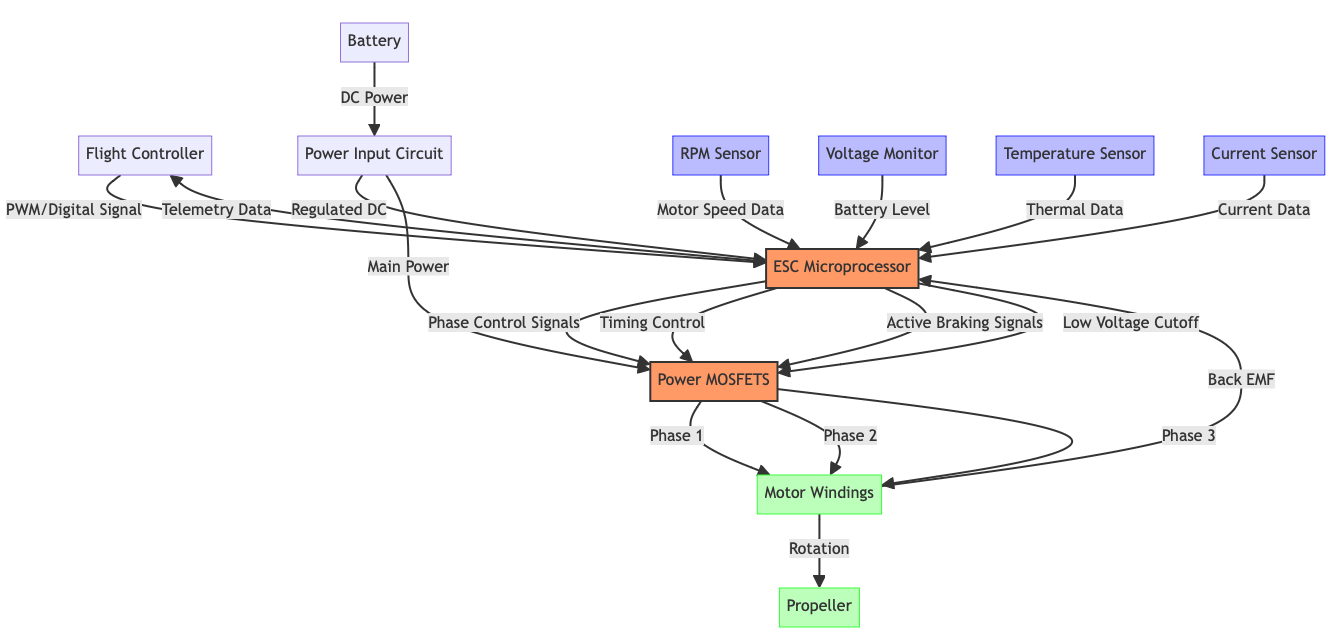
Un ESC est un circuit électronique qui contrôle et régule la vitesse d'un moteur sans balais. Je me souviens encore de ma première construction avec des ESC primitifs qui maintenaient à peine les moteurs en rotation constante - bien loin des dispositifs sophistiqués que nous utilisons aujourd'hui. Dans les drones FPV, les ESC remplissent plusieurs fonctions essentielles que j'ai appris à apprécier davantage à chaque construction :
- Contrôle du moteur : Convertir l'alimentation CC de la batterie en alimentation CA triphasée requise par les moteurs sans balais. J'ai vu la différence entre des ESC bon marché qui produisent un fonctionnement rugueux et bruyant du moteur et des ESC de qualité qui fournissent une puissance douce et précise.
- Régulation de la vitesse : Contrôler précisément le régime du moteur en fonction des commandes du contrôleur de vol. La réactivité de votre drone dépend fortement de la rapidité avec laquelle vos ESC peuvent ajuster la vitesse du moteur - quelque chose que je remarque immédiatement lors des tests d'une nouvelle construction.
- Freinage : Ralentir ou arrêter activement les moteurs au besoin. J'ai trouvé cela particulièrement important pour le vol freestyle, où les arrêts rapides et les changements de direction sont essentiels.
- Protection de la batterie : Surveiller la tension et mettre en œuvre des coupures pour éviter les dommages. J'ai sauvé d'innombrables batteries d'une mort prématurée grâce à une protection appropriée contre les basses tensions.
- Télémétrie : Fournir des données sur les performances, la température et le régime (dans les modèles avancés). Cette fonctionnalité a transformé la façon dont je règle mes quads, en fournissant des informations qu'il était impossible d'obtenir il y a seulement quelques années.
L'évolution des ESC pour drones
J'ai été témoin de l'évolution spectaculaire des ESC depuis 2019, lorsque j'ai commencé mon passe-temps, et la progression a été tout simplement remarquable :
- Premiers ESC (2010-2014) : Pilotes de moteur de base avec des fonctionnalités limitées et un micrologiciel SimonK. Ces dispositifs primitifs nécessitaient un étalonnage minutieux et offraient des performances minimales.
- Ère BLHeli (2015-2017) : Amélioration des performances, des protocoles numériques et des options de configuration. Ce fut un changement de donne - soudainement, les gens pouvaient se connecter aux ESC via le contrôleur de vol et ajuster les paramètres sans soudure ni programmateurs matériels.
- BLHeli_S (2017-2018) : Traitement amélioré, meilleures performances et plus de fonctionnalités.
- BLHeli_32 (2018-présent) : Traitement 32 bits, télémétrie et capacités avancées.
- Alternatives modernes (2020+) : AM32, JESC et autres options de micrologiciels avec des fonctionnalités uniques. J'ai expérimenté ces options plus récentes, en particulier AM32, qui a insufflé une nouvelle vie à certains de mes anciens matériels.
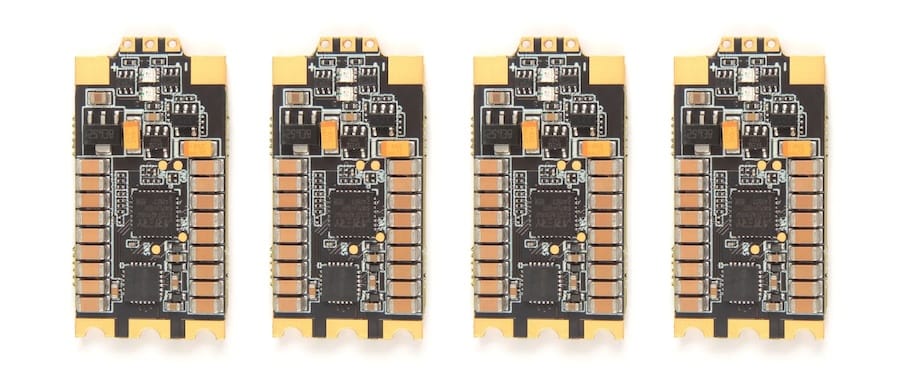
Cette progression a conduit à des ESC plus petits et plus performants, avec des fonctionnalités et des performances de plus en plus sophistiquées. Je suis personnellement passé d'ESC volumineux et séparés qui nécessitaient un montage sur chaque bras à de minuscules cartes 4 en 1 qui pèsent moins qu'un seul ancien ESC tout en offrant beaucoup plus de capacités.
Composants de base d'un ESC
Les ESC modernes intègrent plusieurs composants clés qui fonctionnent ensemble pour créer l'expérience de vol. Permettez-moi de vous expliquer ce que j'ai appris sur ces composants au fil des années de construction et de dépannage.
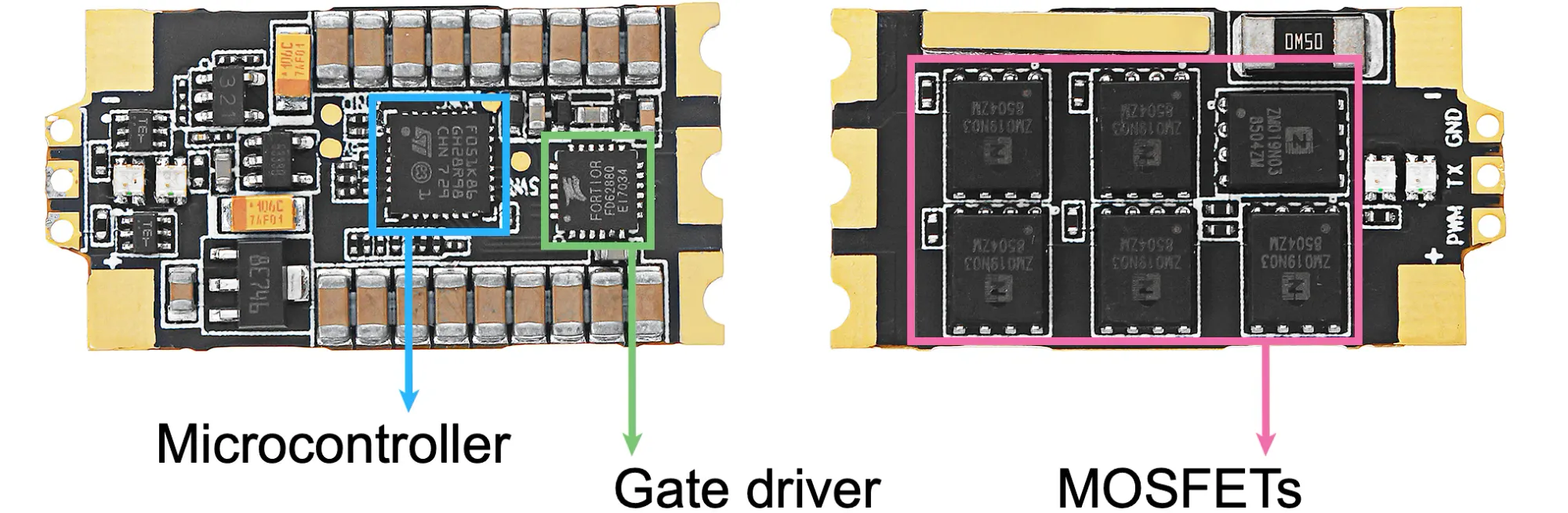
Microprocesseur
Le cerveau de l'ESC, traitant les commandes et contrôlant l'alimentation électrique :
- Processeurs 8 bits : Présents dans les anciens ESC et les modèles BLHeli_S économiques. J'ai commencé avec ceux-ci, et bien qu'ils aient fait le travail, les limitations étaient frustrantes lorsqu'il s'agissait de pousser les performances.
- Processeurs 32 bits : Utilisés dans les ESC BLHeli_32 et plus récents, offrant plus de puissance de traitement. La première fois que j'ai mis à niveau vers un ESC 32 bits, la différence de réactivité et de fonctionnalités était immédiatement perceptible.
- ARM Cortex : Courant dans les ESC haute performance, permettant des fonctionnalités avancées. Je les utilise dans mes constructions de compétition où chaque milliseconde de temps de réponse compte.
MOSFET (transistors à effet de champ à semi-conducteur à oxyde métallique)
Composants de commutation de puissance qui contrôlent le flux de courant vers les phases du moteur. J'ai appris que la qualité des MOSFET est souvent ce qui distingue les ESC haut de gamme des options économiques :
- Qualité des MOSFET : Détermine l'efficacité, la génération de chaleur et la gestion du courant. J'ai grillé suffisamment de MOSFET bon marché pour savoir qu'investir dans la qualité ici rapporte des dividendes en termes de fiabilité et de performance.
- Nombre de MOSFET : Généralement 6 par moteur (2 par phase). Certains de mes modèles haute performance utilisent des ESC avec des MOSFET doublés pour une meilleure gestion du courant et une meilleure répartition de la chaleur.
- Disposition des MOSFET : Affecte les performances et la durabilité. J'ai remarqué que les ESC avec une meilleure disposition des MOSFET ont tendance à fonctionner plus froidement, même sous de lourdes charges.
Composants de support
Circuits supplémentaires qui permettent un fonctionnement correct. Ces composants souvent négligés peuvent faire une différence significative dans les performances :
- Condensateurs : Filtrent le bruit et lissent la distribution de l'alimentation. J'ajoute toujours des condensateurs de filtrage supplémentaires à mes modèles après avoir appris à mes dépens comment le bruit électrique peut affecter les performances de vol.
- Régulateurs de tension : Fournissent une alimentation appropriée au microprocesseur. J'ai eu des ESC qui ont échoué en raison d'une mauvaise régulation de tension, en particulier lors de l'utilisation de configurations à tension plus élevée.
- Capteurs de courant : Mesurent la consommation d'énergie (dans les ESC compatibles avec la télémétrie). La précision de ces capteurs varie considérablement - j'ai constaté que les ESC haut de gamme ont tendance à avoir une mesure de courant plus précise.
- Capteurs de température : Surveillent la chaleur pour la protection (dans les modèles avancés). Cette fonctionnalité a sauvé plusieurs de mes modèles des dommages thermiques lors de longues sessions de vol estivales.
Interfaces d'entrée/sortie
Connexions pour la communication et l'alimentation :
- Entrée de signal : Reçoit les commandes du contrôleur de vol. J'ai constaté que la qualité de ces connexions a un impact significatif sur la fiabilité - des joints de soudure froids ici ont causé plus d'une panne mystérieuse dans mes modèles.
- Connexions d'alimentation : Plages d'entrée de la batterie et de sortie du moteur. J'utilise toujours un fil de calibre approprié ici - j'ai appris par une défaillance spectaculaire que les fils sous-dimensionnés ne peuvent pas gérer les courants de crête.
- Sortie de télémétrie : Renvoie les données au contrôleur de vol (si pris en charge). Cette fonctionnalité a transformé la façon dont je surveille mes quads en vol, fournissant des données en temps réel qui aident à prévenir les dommages aux composants.
Types et configurations matérielles des ESC
Les ESC existent en différents facteurs de forme et configurations pour s'adapter à différents modèles et exigences. Au fil des ans, j'ai utilisé pratiquement tous les types de configuration ESC disponibles, et chacun a sa place en fonction de ce que vous construisez.
ESC individuels vs 4-en-1
ESC individuels
ESC séparés pour chaque moteur. J'ai commencé avec ceux-ci et les utilise toujours pour certains modèles :
Avantages :
- Plus facile à remplacer en cas de panne. J'ai sauvé d'innombrables sessions de vol en ayant un ESC individuel de rechange dans mon kit de terrain.
- Meilleure dissipation de la chaleur. J'ai trouvé cela particulièrement important pour les modèles haute performance qui repoussent les limites de la gestion du courant.
- Peut mélanger et assortir les calibres si nécessaire. J'ai construit des quads asymétriques où différents moteurs nécessitaient des calibres ESC différents.
- Souvent plus d'options de montage flexibles. J'ai créé des modèles inhabituels où le montage standard n'était pas possible.
Inconvénients :
- Plus de complexité de câblage. J'ai passé de nombreuses heures à acheminer méticuleusement les fils pour garder les modèles propres.
- Poids total potentiellement plus élevé. Chaque gramme compte dans les modèles de course, et j'ai mesuré des différences de 10 à 15 g par rapport aux solutions 4-en-1.
- Prend plus de place sur le châssis. Cela limite les autres composants que vous pouvez ajouter.
- Généralement plus cher au total. J'ai généralement dépensé 20 à 30 % de plus lors de l'utilisation d'ESC individuels.
Meilleur pour :
- Les grands modèles avec un espace suffisant. Mes croiseurs longue portée utilisent généralement des ESC individuels.
- Les pilotes qui privilégient la réparabilité. Je les recommande à mes amis qui volent dans des zones reculées.
- Modèles personnalisés avec des exigences de moteur différentes. Je les ai utilisés pour des configurations asymétriques expérimentales.
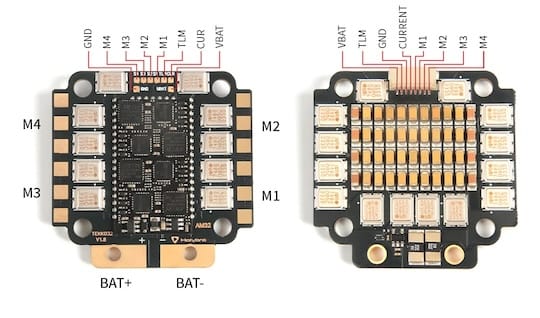
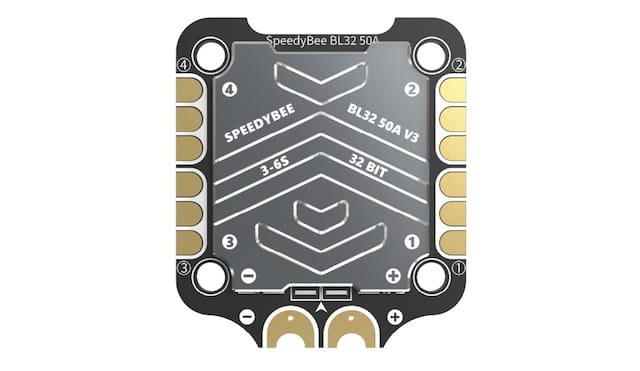
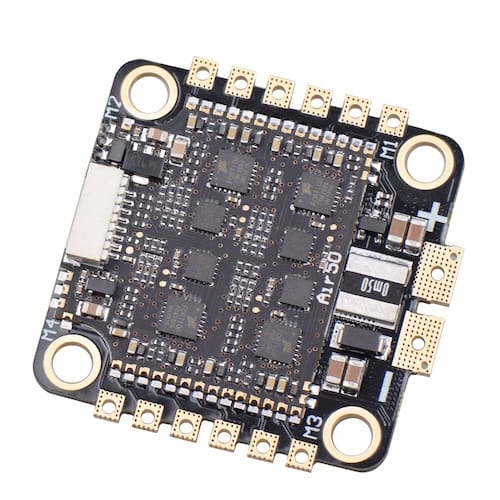
Cartes ESC 4-en-1
Quatre ESC intégrés sur un seul PCB. Ils sont devenus mon choix par défaut pour la plupart des modèles :
Avantages :
- Câblage plus propre et plus simple. Mes modèles sont devenus beaucoup plus soignés lorsque je suis passé aux ESC 4-en-1.
- Généralement plus léger au total. J'ai économisé jusqu'à 15 g sur les modèles de course en utilisant des ESC 4-en-1.
- Prend moins de place. Cela permet des modèles plus compacts ou de la place pour des composants supplémentaires.
- Souvent plus abordable en tant que package. J'économise généralement 20 à 30 % par rapport à des ESC individuels équivalents.
- Installation plus facile. Je peux terminer un modèle en environ la moitié du temps en utilisant un ESC 4-en-1.
Inconvénients :
- Si un ESC tombe en panne, l'ensemble de la carte peut nécessiter un remplacement. J'ai perdu des cartes entières à cause d'un seul court-circuit moteur - une leçon coûteuse.
- Génération de chaleur concentrée. J'ai appris à assurer un flux d'air adéquat dans les modèles serrés pour éviter les problèmes thermiques.
- Moins de flexibilité pour les configurations de moteurs mixtes. Cela a limité certains de mes modèles plus expérimentaux.
Meilleur pour :
- Modèles propres avec un câblage minimal. Tous mes drones avec caméra utilisent des ESC 4-en-1 pour une configuration la plus propre possible.
- Configurations de quadricoptère standard. Mes quads de course et de freestyle utilisent maintenant presque exclusivement des ESC 4-en-1.
- Modèles basés sur des piles avec des contrôleurs de vol assortis. L'intégration entre les piles FC et ESC modernes est difficile à battre.
Facteurs de forme des ESC
ESC standard
ESC individuels traditionnels :
- Taille : Généralement 20-30mm de long. Je me souviens quand les ESC avaient la taille d'un pouce—maintenant ils sont souvent plus petits qu'un ongle.
- Montage : Diverses options dont la gaine thermorétractable, les attaches zip, ou les supports dédiés. J'ai tout essayé et opté pour un montage souple avec un revêtement conforme pour la meilleure isolation des vibrations.
- Connexions : Habituellement des fils pour le signal et l'alimentation. J'ai appris à les garder aussi courts que possible pour réduire la résistance et le poids.

ESC en Stack 20×20mm
Conçus pour s'empiler avec les contrôleurs de vol :
- Taille : Motif de montage 20×20mm. J'ai converti la plupart de mes constructions de moins de 250g à ce format.
- Montage : Stack standard avec contrôleur de vol. J'utilise toujours un montage souple entre les couches du stack après avoir appris à quel point les vibrations peuvent affecter les performances.
- Connexions : Plages de soudure directes ou câbles plats. Je préfère la soudure directe pour la fiabilité, bien que les câbles plats facilitent la maintenance.

ESC en Stack 30,5×30,5mm
ESC plus grands compatibles avec les stacks :
- Taille : Motif de montage 30,5×30,5mm. Je les utilise pour mes constructions freestyle et longue portée où j'ai besoin d'une meilleure gestion de la puissance.
- Montage : Stack standard avec contrôleur de vol. J'ai constaté que le motif de montage plus grand offre une meilleure stabilité dans les grandes constructions.
- Connexions : Plages de soudure directes ou câbles plats. Les cartes plus grandes offrent généralement des points de connexion plus robustes, ce que j'apprécie lorsque je travaille avec des fils de plus gros calibre.
Solutions AIO (All-In-One)
ESC intégrés aux contrôleurs de vol :
- Taille : Diverses, généralement 20×20mm ou 30,5×30,5mm. Je les utilise exclusivement dans mes micro-constructions.
- Intégration : FC et ESC combinés en une seule carte. J'étais sceptique sur cette approche au début, mais la fiabilité s'est considérablement améliorée ces dernières années.
- Connexions : Connexions internes simplifiées. La réduction du câblage externe a éliminé de nombreux points de défaillance potentiels dans mes constructions.

Spécifications et Capacités en Courant
Gestion du Courant
Le courant continu maximum qu'un ESC peut gérer en toute sécurité. J'ai appris à être prudent avec ces valeurs nominales après avoir vu des ESC littéralement fondre lors de vols agressifs :
- Drones de Course : 35-50A par moteur. Mes constructions de course utilisent généralement des ESC 45A même s'ils dépassent rarement 35A en continu - la marge fournit une tranquillité d'esprit pendant les courses intenses.
- Drones Freestyle : 30-45A par moteur. Pour le freestyle, j'ai constaté qu'avoir une marge de courant est essentiel pour ces moments où vous repoussez les limites avec des manœuvres agressives.
- Longue Portée/Cinématique : 25-40A par moteur. Mes constructions longue portée utilisent généralement des ESC 35A, qui offrent un bon équilibre entre gestion du courant et efficacité.
- Micro-Constructions : 10-25A par moteur. J'ai constaté que même les petites constructions peuvent tirer des quantités surprenantes de courant lors de vols agressifs, donc je ne descends pas en dessous de 20A sauf pour les plus petits whoops.
Capacités en Rafale
Courant maximum de courte durée. J'ai appris à ne pas trop compter sur ces valeurs nominales :
- Capacités en Rafale Typiques : 1,5 à 2 fois la capacité continue. Lors de mes tests, j'ai constaté que de nombreux ESC ne peuvent pas réellement maintenir leurs capacités en rafale annoncées pendant toute la durée revendiquée.
- Durée : Généralement spécifiée pour 5 à 10 secondes. Je les ai chronométrés avec un chronomètre lors de tests sur banc et j'ai constaté des variations importantes entre les fabricants.
- Importance : Critique pour gérer les coups de gaz et les manœuvres agressives. J'ai remarqué que les ESC avec des MOSFET de meilleure qualité gèrent beaucoup mieux les courants en rafale que les options budget.
BEC (Circuit Éliminateur de Batterie)
Régulation de tension pour alimenter d'autres composants. Cette fonctionnalité est devenue moins importante dans les constructions modernes :
- BEC Linéaire : Simple, moins efficace, présent dans les anciens ESC. Je les utilisais dans mes premières constructions et j'ai remarqué qu'ils chauffaient beaucoup lorsqu'ils alimentaient plusieurs périphériques.
- BEC à Découpage : Plus efficace, courant dans les ESC modernes. La réduction de la génération de chaleur fait une différence notable dans les constructions compactes.
- Capacités : Généralement 5V à 1-3A. J'ai constaté que 2A suffisent généralement pour la plupart des constructions, sauf si vous alimentez des accessoires gourmands comme des bandes LED.
La plupart des constructions modernes en stack n'utilisent pas les BEC des ESC. J'utilise maintenant des PDB dédiés ou des contrôleurs de vol avec régulation de tension intégrée pour une alimentation plus propre.
Protocoles et Communication des ESC
Le protocole détermine comment le contrôleur de vol communique avec l'ESC, affectant les performances et les fonctionnalités. J'ai utilisé tous les protocoles, du PWM standard au dernier DShot bidirectionnel, et l'évolution a été remarquable.
PWM Standard
Le protocole analogique original :
Voici le contenu traduit en français avec la structure HTML et les liens préservés :
- Type de signal : Modulation de largeur d'impulsion (50-400Hz). J'ai commencé avec cela sur mes premières constructions, et les limitations étaient immédiatement apparentes.
- Résolution : Plage de 1000-2000μs (environ 8 bits). Les pas grossiers étaient perceptibles en vol, créant un effet "d'escalier" dans la réponse des gaz.
- Latence : 2-4ms. Cela semblait une éternité lorsque j'essayais d'effectuer des manœuvres précises.
- Avantages : Compatibilité universelle. Je pouvais utiliser n'importe quel ESC avec n'importe quel contrôleur de vol - le seul véritable avantage.
- Inconvénients : Latence élevée, faible résolution, pas de télémétrie. Mes premiers quads basés sur PWM semblaient mous et imprécis par rapport aux constructions modernes.
- Utilisation actuelle : Obsolète pour les drones FPV. Je n'ai pas utilisé PWM depuis des années et ne le recommanderais pas pour une construction moderne.
OneShot125
Protocole numérique précoce :
- Type de signal : Timing numérique (125-250Hz). C'était mon premier aperçu des protocoles numériques, et l'amélioration était notable.
- Résolution : Plage de 125-250μs (environ 10 bits). La réponse plus fluide des gaz a fait une différence dans la sensation de vol.
- Latence : 1-2ms. Encore élevée selon les normes d'aujourd'hui, mais une amélioration significative par rapport à PWM.
- Avantages : Meilleur que le PWM standard. Mes quads semblaient plus réactifs lorsque j'ai fait ce changement.
- Inconvénients : Latence encore relativement élevée. Je pouvais sentir le délai lors de manœuvres rapides.
- Utilisation actuelle : Largement remplacé par DShot. Je n'ai pas utilisé OneShot depuis des années.
Multishot
Protocole plus rapide pour la course :
- Type de signal : Timing numérique (jusqu'à 32kHz). Lorsque j'ai essayé ce protocole pour la première fois, la latence réduite était immédiatement apparente.
- Résolution : Plage de 5-25μs (environ 12 bits). La résolution plus fine des gaz a rendu le vol stationnaire et les mouvements précis plus faciles.
- Latence : 0,2-0,5ms. Cela a changé la donne pour la course - mes entrées semblaient presque instantanément traduites en changements de moteur.
- Avantages : Très faible latence. Mes constructions de course utilisant Multishot avaient une netteté qui n'était pas possible avec les protocoles précédents.
- Inconvénients : Moins fiable que DShot. J'ai rencontré des problèmes occasionnels qui m'ont amené à passer à DShot pour la plupart des constructions.
- Utilisation actuelle : Applications de niche. J'ai encore une construction de course spécialisée utilisant Multishot, mais c'est rare dans les quads modernes.
DShot
La famille de protocoles numériques standard actuelle :
- Type de signal : Paquets de données numériques. La robustesse de cette approche a éliminé de nombreux problèmes de fiabilité que j'ai rencontrés avec les protocoles précédents.
- Variantes :
- DShot150 : Débit de données de 150kbps. J'ai utilisé cela sur des micro-constructions où la puissance de traitement est limitée.
- DShot300 : Débit de données de 300kbps. Un bon équilibre pour la plupart des constructions - j'utilise cela quand je ne suis pas sûr de l'intégrité du signal.
- DShot600 : Débit de données de 600kbps (le plus courant). C'est mon choix par défaut pour la plupart des constructions, offrant d'excellentes performances sans pousser les limites.
- DShot1200 : Débit de données de 1200kbps. J'utilise cela sur des constructions haute performance avec des chemins de signal courts et propres.
- Résolution : 16 bits (plage de valeurs 0-2047). Le contrôle précis que cela permet est remarquable - je peux faire de minuscules ajustements des gaz qui n'étaient pas possibles avec les protocoles précédents.
- Latence : 0,2-0,5ms selon la variante. Lors de tests dos à dos, je pouvais sentir la différence entre DShot150 et DShot600 dans des constructions réactives.
- Avantages : Précision numérique, contrôle d'erreur, commandes, capacité bidirectionnelle. L'amélioration de la fiabilité à elle seule valait la peine de passer à cela.
- Inconvénients : Nécessite un matériel compatible. J'ai dû mettre à niveau certains de mes anciens ESC pour utiliser ce protocole.
- Utilisation actuelle : Standard pour les constructions modernes. J'utilise maintenant DShot600 sur pratiquement toutes mes constructions.
ProShot
Version optimisée de DShot :
- Type de signal : DShot simplifié. Lorsque j'ai testé ce protocole, les différences par rapport à DShot étaient subtiles.
- Débit de données : Similaire à DShot600. Dans mes tests, les performances étaient comparables.
- Latence : Légèrement inférieure à DShot. Je pouvais à peine percevoir la différence dans la plupart des scénarios de vol.
- Avantages : Charge CPU potentiellement plus faible. J'ai remarqué cet avantage principalement sur les contrôleurs de vol F4 exécutant des configurations complexes.
- Inconvénients : Adoption limitée. J'ai trouvé moins de ressources pour le dépannage lorsque des problèmes sont survenus.
- Utilisation actuelle : Rare, principalement remplacé par DShot. J'ai expérimenté ProShot mais je suis finalement revenu à DShot pour un meilleur support de la communauté.
DShot bidirectionnel
DShot amélioré avec télémétrie :
- Type de signal : Communication DShot bidirectionnelle. Ce fut une révélation lorsque je l'ai implémenté pour la première fois - soudain, mon contrôleur de vol savait exactement ce que faisaient les moteurs.
- Fonctionnalités : Permet un retour RPM pour le filtrage. L'amélioration des performances de vol était spectaculaire sur ma première construction avec cette fonctionnalité.
- Exigences : Firmware ESC et contrôleur de vol compatibles. J'ai dû mettre à jour plusieurs composants pour tirer parti de cette capacité.
- Avantages : Permet le filtrage RPM, améliore les performances. La réduction du bruit et des vibrations était immédiatement perceptible dans mes logs blackbox.
- Inconvénients : Configuration légèrement plus complexe. J'ai passé quelques heures à faire fonctionner correctement ma première configuration bidirectionnelle.
- Utilisation actuelle : De plus en plus standard pour les constructions performantes. J'active maintenant cela sur toutes les constructions compatibles - les avantages sont trop importants pour être ignorés.
Comparaison des protocoles
Sur la base de mes nombreux tests sur plusieurs constructions, voici comment ces protocoles se comparent :
| Protocole | Résolution | Latence | Contrôle d'erreur | Télémétrie | Commandes | Utilisation actuelle |
|---|---|---|---|---|---|---|
| PWM | 8 bits | 2-4ms | Non | Non | Non | Obsolète |
| OneShot125 | 10 bits | 1-2ms | Non | Non | Non | Héritage |
| Multishot | 12 bits | 0,2-0,5ms | Non | Non | Non | Niche |
| DShot150 | 16 bits | ~0,5ms | Oui | Optionnel | Oui | Niveau d'entrée |
| DShot300 | 16 bits | ~0,3ms | Oui | Optionnel | Oui | Courant |
| DShot600 | 16 bits | ~0,2ms | Oui | Optionnel | Oui | Standard |
| DShot1200 | 16 bits | ~0,1ms | Oui | Optionnel | Oui | Haut de gamme |
| ProShot | 16 bits | ~0,2ms | Oui | Optionnel | Oui | Rare |
Options de firmware ESC
Le firmware est le logiciel qui s'exécute sur le microprocesseur de l'ESC, déterminant ses capacités et son comportement. J'ai expérimenté toutes les principales options de firmware, et chacune a ses forces et ses faiblesses.
BLHeli_S
Firmware 8 bits populaire que j'ai beaucoup utilisé :
- Compatibilité matérielle : ESC 8 bits. J'ai commencé avec ceux-ci sur mes premières constructions et je les utilise toujours pour certaines applications.
- Fonctionnalités : Contrôle basique des moteurs, configuration limitée. Bien que moins riches en fonctionnalités que les options 32 bits, j'ai constaté qu'ils gèrent très bien l'essentiel.
- Performance : Bon pour les constructions de niveau débutant à intermédiaire. J'ai construit des dizaines de quads avec des ESC BLHeli_S qui volent magnifiquement pour le freestyle et la course occasionnelle.
- Configuration : Logiciel BLHeli Configurator. J'apprécie l'interface simple, bien qu'il manque certaines options avancées.
- Avantages : Largement pris en charge, fiable. J'ai trouvé ceux-ci incroyablement fiables - certaines de mes plus anciennes constructions fonctionnent toujours avec BLHeli_S sans problème.
- Inconvénients : Fonctionnalités limitées par rapport aux options 32 bits. J'ai atteint le plafond de ce qui est possible avec ceux-ci en poussant les limites de performance.
BLHeli_32
Firmware 32 bits avancé qui a révolutionné mes constructions :
- Compatibilité matérielle : ESC 32 bits. J'ai mis à niveau tous mes quads principaux vers du matériel BLHeli_32 quand il est devenu disponible.
- Fonctionnalités : Configuration étendue, télémétrie, contrôle des LED. La première fois que j'ai accédé aux données de télémétrie, cela a transformé la façon dont je surveillais mes constructions pendant le vol.
- Performance : Excellente pour toutes les applications. J'ai utilisé des ESC BLHeli_32 pour tout, des tiny whoops aux croiseurs longue portée, avec des résultats toujours impressionnants.
- Configuration : Logiciel BLHeli_32 Configurator. L'interface est plus complète que BLHeli_S, me donnant accès à des paramètres dont je ne soupçonnais même pas l'existence avant de les avoir.
- Avantages : Riche en fonctionnalités, haute performance. La différence était immédiatement perceptible lors de la mise à niveau - contrôle des moteurs plus fluide, meilleur freinage et réponse des gaz plus précise.
- Inconvénients : Propriétaire, nécessite une licence payante pour les fabricants. Cela a limité certaines innovations et maintenu les prix plus élevés qu'ils ne l'auraient été autrement.
AM32
Alternative open source à BLHeli_32 que j'adopte de plus en plus :
- Compatibilité matérielle : ESC 32 bits. J'ai réussi à flasher ceci sur plusieurs marques différentes d'ESC 32 bits.
- Fonctionnalités : Similaire à BLHeli_32, axé sur la communauté. J'ai été impressionné par la rapidité avec laquelle les nouvelles fonctionnalités sont implémentées en fonction des commentaires des utilisateurs.
- Performance : Comparable à BLHeli_32. Dans mes tests comparatifs, je n'ai pas pu faire la différence au niveau du ressenti en vol entre des constructions identiques avec BLHeli_32 ou AM32.
- Configuration : AM32 Configurator ou JESC Configurator. L'interface n'est pas aussi raffinée, mais elle fait le travail efficacement.
- Avantages : Open source, gratuit, développement actif. J'apprécie l'aspect communautaire et le rythme rapide d'amélioration.
- Inconvénients : Support moins répandu. J'ai dû faire plus de recherches pour résoudre les problèmes par rapport aux options plus établies.
JESC
Firmware amélioré basé sur BLHeli_S qui a donné un nouveau souffle à mon ancien matériel :
- Compatibilité matérielle : ESC BLHeli_S. J'ai utilisé ceci pour mettre à niveau plusieurs anciennes constructions sans remplacer les ESC.
- Fonctionnalités : PWM 48kHz, performances améliorées. La fréquence PWM plus élevée a fait une différence notable dans la fluidité des moteurs sur mes constructions freestyle.
- Performance : Meilleure que BLHeli_S d'origine. J'étais sceptique sur les affirmations jusqu'à ce que j'essaie - l'amélioration de la réactivité et de la fluidité valait définitivement la mise à niveau.
- Configuration : JESC Configurator. L'interface est similaire à BLHeli_S Configurator, rendant la transition facile.
- Avantages : Améliore les performances du matériel existant. J'ai économisé des centaines en mettant à niveau le firmware plutôt qu'en remplaçant les ESC.
- Inconvénients : Licence payante requise. Bien que pas chère, j'étais initialement réticent à payer pour un firmware quand des options gratuites existent. Après l'avoir essayé, je considère que c'est de l'argent bien dépensé.
Bluejay
Firmware open-source pour matériel BLHeli_S avec lequel j'ai récemment expérimenté :
- Compatibilité matérielle : ESC BLHeli_S. J'ai réussi à flasher ceci sur plusieurs de mes anciens ESC.
- Fonctionnalités : Performances améliorées, développement ouvert. J'apprécie particulièrement le contrôle de puissance au démarrage amélioré, qui a éliminé le bégaiement occasionnel que j'ai connu avec le firmware d'origine.
- Performance : Meilleure que BLHeli_S d'origine. Dans mes tests, c'est presque au niveau de JESC mais sans les frais de licence.
- Configuration : Bluejay Configurator. L'interface est simple et inclut des fonctionnalités uniques non trouvées dans d'autres configurateurs.
- Avantages : Gratuit, open-source. J'adore soutenir les projets communautaires, surtout quand ils fonctionnent aussi bien.
- Inconvénients : Compatibilité matérielle limitée. J'ai eu quelques ESC qui n'étaient pas compatibles, ce qui était frustrant lors de tentatives de standardisation entre les constructions.

Comparaison des fonctionnalités des firmwares
Sur la base de mes tests approfondis sur de multiples constructions, voici comment ces options de firmware se comparent :
| Fonctionnalité | BLHeli_S | BLHeli_32 | AM32 | JESC | Bluejay |
|---|---|---|---|---|---|
| Matériel | 8 bits | 32 bits | 32 bits | 8 bits | 8 bits |
| Fréquence PWM | 24kHz | 16-48kHz | 24-48kHz | 48kHz | 24-48kHz |
| DShot bidirectionnel | Limité | Oui | Oui | Oui | Oui |
| Télémétrie | Non | Oui | Oui | Limitée | Limitée |
| Puissance au démarrage | Réglable | Réglable | Réglable | Réglable | Réglable |
| Freinage | Limité | Avancé | Avancé | Amélioré | Amélioré |
| Configurabilité | Modérée | Étendue | Étendue | Modérée | Modérée |
| Coût | Gratuit | Gratuit (utilisateurs) | Gratuit | Payant | Gratuit |
| Développement | Fermé | Fermé | Ouvert | Fermé | Ouvert |
J'ai constaté que le bon choix de firmware dépend fortement de vos besoins spécifiques et de votre matériel. Pour mes constructions haute performance, j'utilise exclusivement BLHeli_32 ou AM32. Pour les constructions économiques ou lors de la réutilisation d'ancien matériel, Bluejay est devenu mon option de prédilection.
Sélectionner le bon ESC
Choisir l'ESC approprié dépend de vos besoins spécifiques et des exigences de votre construction. Après avoir construit des centaines de drones pour divers usages, j'ai développé de fortes préférences pour différentes applications.
Pour les drones de course
Priorité : Performance, fiabilité et réactivité - chaque milliseconde compte en course.
Fonctionnalités recommandées :
- Courant nominal : 35-50A par moteur. J'ai constaté que 45A offre l'équilibre parfait entre performance et fiabilité pour la plupart des constructions de course.
- Protocole : DShot600 ou supérieur. Je n'envisagerais rien de moins pour la course - la différence de réactivité est perceptible.
- Firmware : BLHeli_32 ou AM32. J'ai gagné des courses avec les deux et les performances sont comparables.
- Configuration : 4-en-1 pour des constructions propres. Mes quads de course sont tous construits avec des ESC 4-en-1 pour l'économie de poids et la simplification du câblage.
- Fonctionnalités : DShot bidirectionnel pour le filtrage RPM. Cela a été un changement de donne pour mes constructions de course - le filtrage amélioré signifie que je peux utiliser des valeurs PID plus élevées sans oscillations.
Exemples :
- Hobbywing XRotor 60A 4-en-1. C'est mon choix pour les constructions de course sérieuses - fiabilité à toute épreuve et excellentes performances.
- T-Motor F55A Pro II. J'ai été impressionné par les performances thermiques de ces ESC lors de longues sessions de course.
- Aikon TEKKO32 F4 50A. Ils offrent un excellent rapport qualité-prix et ont propulsé plusieurs de mes constructions sur le podium.
Pour les drones freestyle
Priorité : Fiabilité, performance fluide et durabilité - le freestyle impose des contraintes uniques aux composants.
Fonctionnalités recommandées :
- Courant nominal : 30-45A par moteur. J'ai constaté que 40A est le point idéal pour la plupart des configurations freestyle, offrant de la marge sans poids excessif.
- Protocole : DShot300 ou DShot600. J'utilise maintenant DShot600 pour toutes mes configurations freestyle - l'amélioration de la résolution est perceptible dans les manœuvres précises.
- Firmware : BLHeli_32 ou AM32. Les fonctionnalités de freinage avancées de ces firmwares font une différence significative dans le pilotage freestyle.
- Configuration : 4-en-1 ou individuel selon la préférence. J'ai converti la plupart de mes configurations freestyle en ESC 4-en-1, mais j'utilise toujours des ESC individuels sur les configurations où je privilégie la réparabilité.
- Fonctionnalités : Télémétrie pour la gestion de la batterie. Cela m'a évité d'endommager d'innombrables batteries lors de longues sessions freestyle.
Exemples :
- HGLRC Forward 45A 4-en-1. Je les utilise dans ma configuration freestyle principale depuis plus d'un an avec d'excellents résultats.
- Spedix GS45A. Ils ont survécu à des crashs spectaculaires dans mes configurations - la durabilité est impressionnante.
- Diatone Mamba F40 40A. Une excellente option rapport qualité-prix que j'ai utilisée avec succès dans plusieurs configurations freestyle de milieu de gamme.
Pour les drones longue portée/cinématiques
Priorité : Efficacité, fiabilité et fonctionnement en douceur - ces configurations doivent être fiables lors de vols loin de la maison.
Fonctionnalités recommandées :
- Courant nominal : 25-40A par moteur. J'ai constaté que 35A offre une marge suffisante pour la plupart des configurations longue portée sans ajouter de poids inutile.
- Protocole : DShot300 ou DShot600. Je préfère DShot300 pour les configurations longue portée - c'est plus que suffisamment réactif et potentiellement plus fiable sur de longues distances de signal.
- Firmware : BLHeli_32 ou AM32. Les capacités de télémétrie sont essentielles pour surveiller l'état du système pendant les vols prolongés.
- Configuration : ESC individuels pour la redondance.
- Fonctionnalités : Télémétrie, surveillance de la température. Je m'appuie fortement sur ces fonctionnalités pour m'assurer de ne pas pousser les composants trop fort pendant les vols prolongés.
Exemples :
- T-Motor F35A. Ils ont été exceptionnellement fiables dans mes configurations longue portée - j'ai parcouru des centaines de kilomètres avec eux.
- Aikon TEKKO32 35A. L'efficacité de ces ESC est impressionnante, contribuant à prolonger les temps de vol sur mes croiseurs longue portée.
- Holybro Tekko32 35A. J'apprécie les données de télémétrie complètes qu'ils fournissent, me donnant confiance lors de vols distants.
Pour les configurations micro
Priorité : Taille, poids et intégration - chaque gramme et millimètre compte dans ces minuscules configurations.
Fonctionnalités recommandées :
- Courant nominal : 10-25A par moteur. J'ai constaté que 20A offre un bon équilibre pour la plupart des configurations micro, même en poussant les performances.
- Protocole : DShot300 ou DShot600. J'utilise DShot600 quand c'est possible, mais DShot300 est parfaitement adéquat pour la plupart des applications micro.
- Firmware : BLHeli_S ou BLHeli_32. J'utilise généralement BLHeli_S pour les plus petites configurations en raison des considérations de coût et de poids, mais BLHeli_32 pour les configurations 3" où les performances sont plus critiques.
- Configuration : AIO ou 4-en-1. Mes plus petites configurations utilisent des cartes AIO qui combinent FC et ESC, tandis que mes configurations 3" utilisent généralement des stacks FC et ESC 4-en-1 séparés.
- Taille : 20×20mm ou moins. J'ai été étonné de voir à quel point les ESC 16×16mm sont devenus performants pour les plus petites configurations.
Exemples :
- HGLRC Zeus 20A 4-en-1. Ils ont alimenté plusieurs de mes configurations 3" avec d'excellentes performances pour leur taille.
- Happymodel 12A 4-en-1. Mon choix pour les configurations toothpick - léger mais étonnamment performant.
- BetaFPV F4 2-4S AIO. J'ai construit plusieurs micro whoops avec ces cartes et j'ai été impressionné par leur rapport performance/poids.
Pour les débutants
Priorité : Fiabilité, rapport qualité-prix et facilité d'utilisation - la première expérience de construction doit être la plus fluide possible.
Fonctionnalités recommandées :
- Courant nominal : 30-40A par moteur (offre de la marge). Je recommande toujours aux débutants d'avoir plus de marge qu'ils ne le pensent nécessaire - cela évite les pannes frustrantes pendant le processus d'apprentissage.
- Protocole : DShot300 ou DShot600. Je suggère DShot300 pour les débutants - c'est amplement rapide et potentiellement plus tolérant aux problèmes d'intégrité du signal.
- Firmware : BLHeli_S ou BLHeli_32. Je recommande généralement BLHeli_S pour les premières configurations en raison de sa configuration plus simple, puis BLHeli_32 à mesure que les compétences progressent.
- Configuration : 4-en-1 pour un câblage plus simple. La complexité de câblage réduite fait une énorme différence pour les constructeurs débutants - j'ai aidé des dizaines de débutants avec leurs premières configurations, et les ESC 4-en-1 réduisent considérablement la frustration.
- Fonctionnalités : De base, sans complexité écrasante. Je conseille aux débutants de commencer avec des fonctionnalités standard et d'ajouter de la complexité à mesure qu'ils acquièrent de l'expérience.
Exemples :
- iFlight SucceX-E 45A 4-en-1. Je les ai recommandés à de nombreux débutants, et les retours ont été constamment positifs - fiables et simples.
- HAKRC 35A 4-en-1. Ils offrent un excellent rapport qualité-prix et se sont avérés fiables dans les configurations de débutants que j'ai aidées.
- Racerstar REV35 35A. Lorsque le budget est la principale préoccupation, ils offrent des performances acceptables à un prix très accessible.
Installation et configuration des ESC
Une installation et une configuration appropriées sont cruciales pour des performances et une fiabilité optimales. J'ai appris de nombreuses leçons à la dure à travers des centaines de configurations.
Installation du matériel
Considérations de montage
- Emplacement : Positionner pour un refroidissement adéquat. J'ai constaté que le montage des ESC dans le flux d'air fait une différence significative dans les performances thermiques - j'ai une fois mesuré une différence de 15°C juste en repositionnant les ESC dans le souffle des hélices.
- Vibrations : Montage sécurisé pour éviter les dommages dus aux vibrations. Après avoir perdu un ESC à cause de la fatigue des soudures induite par les vibrations, j'utilise maintenant un montage souple pour tous les ESC.
- Protection : Protéger des dommages en cas de crash lorsque possible. Je positionne les ESC à l'intérieur du cadre chaque fois que possible après en avoir eu plusieurs endommagés par des impacts directs.
- Accessibilité : Tenir compte de l'accès pour la maintenance. J'ai construit des quads qui nécessitaient un démontage quasi complet pour accéder aux ESC - plus jamais ça !
- Gestion de la chaleur : Permettre un flux d'air pour le refroidissement. Je laisse un espace adéquat entre les composants et m'assure que rien ne bloque le flux d'air vers les ESC.
Meilleures pratiques de câblage
- Câblage d'alimentation : Utiliser un calibre de fil approprié pour le courant. C'est un domaine où je ne fais jamais de compromis après avoir subi les conséquences d'un câblage sous-dimensionné.
- 20-22AWG pour les micro-constructions. J'utilise du 20AWG pour tout ce qui pourrait tirer plus de 10A.
- 18AWG pour les constructions standard. C'est ma norme pour les quads 5" fonctionnant en 4S ou 6S.
- 16AWG pour les applications à courant élevé. J'utilise cela pour les fils de batterie et parfois les fils de moteur sur les constructions 6S haute performance.
- Câblage de signal : Éloigner des fils d'alimentation pour réduire les interférences. J'achemine les fils de signal du côté opposé de la pile par rapport aux fils d'alimentation chaque fois que possible.
- Câblage moteur : Fils de longueur égale pour des performances équilibrées. Je mesure et coupe les fils de moteur à des longueurs identiques - c'est un petit détail qui contribue à des caractéristiques de vol plus fluides.
- Condensateurs : Installer des condensateurs de taille appropriée près de l'entrée d'alimentation. J'ajoute un condensateur à faible ESR à chaque construction après avoir appris à quel point le bruit électrique peut affecter les performances de vol.
- Isolation : Isoler correctement toutes les connexions. J'utilise généreusement de la gaine thermorétractable et un revêtement de protection sur toute l'électronique exposée après qu'un court-circuit ait mis fin à une construction coûteuse.
Pour des informations plus détaillées sur le câblage, voir :
Guide de câblage des drones
Configuration logicielle
Configuration BLHeli_S
Après avoir configuré des centaines d'ESC, j'ai développé une approche systématique :
- Connecter l'ESC : Via le contrôleur de vol en passthrough ou un programmateur dédié. Je préfère le passthrough pour sa commodité, mais je garde un programmateur dédié dans mon kit de terrain pour le dépannage.
- Paramètres de base :
- Sens du moteur : Normal ou inversé. Je vérifie toujours le sens du moteur avec un rapide test de rotation avant d'installer les hélices - une leçon tirée d'un incident de décollage embarrassant.
- Fréquence PWM : 24kHz standard, 48kHz pour un fonctionnement plus fluide. J'utilise 48kHz sur toutes mes constructions freestyle pour la sensation de moteur plus douce, malgré la légère pénalité d'efficacité.
- Puissance de démarrage : Ajuster en fonction de la taille du moteur et des hélices. J'ai constaté que les constructions plus lourdes ont besoin d'une puissance de démarrage plus élevée - j'utilise généralement 0,75-1,00 pour les quads 5" et 0,5-0,75 pour les micros.
- Timing : Moyen-Élevé pour la plupart des applications. J'utilise Moyen (22,5°) pour l'efficacité ou Élevé (30°) pour des performances maximales, selon l'objectif de la construction.
- Compensation de démagnétisation : Moyenne-Élevée pour la plupart des configurations. Après avoir connu la frustration de la désynchronisation en vol, je ne descends jamais en dessous de Moyen sur aucune construction.
- Paramètres avancés :
- Frein à l'arrêt : Activer pour un freinage actif. J'active ceci sur les constructions freestyle pour des arrêts plus nets mais le désactive sur les constructions longue portée pour l'efficacité.
- Protection basse tension : Configurer en fonction du type de batterie. Je règle cela de manière conservatrice après avoir ruiné plusieurs packs LiPo coûteux.
- Protection de courant : Définir des limites appropriées. Je règle généralement cela environ 20% au-dessus de ce que je m'attends à tirer en fonctionnement normal.
Configuration BLHeli_32
Les options supplémentaires de BLHeli_32 nécessitent une considération plus attentive :
- Connecter l'ESC : Via le contrôleur de vol en passthrough ou une liaison USB. La connexion USB directe sur de nombreux ESC BLHeli_32 est une fonctionnalité que j'en suis venu à apprécier grandement.
- Paramètres de base :
- Sens du moteur : Normal ou inversé. Comme avec BLHeli_S, je teste toujours avant d'installer les hélices.
- Fréquence PWM : 24-48kHz selon la préférence. J'utilise 48kHz pour le freestyle et 24kHz pour les constructions longue portée où l'efficacité est plus importante que la fluidité.
- Puissance de montée en régime : Ajuster pour des démarrages en douceur. J'ai constaté que 25% fonctionne bien pour la plupart des constructions, mais les gros appareils cinématiques peuvent nécessiter 35-40%.
- Timing : 22-25° pour la plupart des applications. Je sors rarement de cette plage après que des tests approfondis aient montré des rendements décroissants.
- Paramètres avancés :
- Type de frein : Off, Stop ou Brake. J'utilise Brake pour les constructions freestyle et Stop pour la plupart des autres.
- Compensation de démagnétisation : Ajuster pour la prévention de la désynchronisation. J'ai constaté que High fonctionne le mieux pour les moteurs à KV élevé, tandis que Medium est suffisant pour les configurations à KV plus faible.
- DShot bidirectionnel : Activer pour le filtrage RPM. J'active ceci sur toutes les constructions qui le supportent - l'amélioration des performances de vol est substantielle.
- Protection de température : Configurer les limites. Je règle l'avertissement à 85°C et le critique à 100°C après avoir mesuré les performances thermiques dans diverses conditions.
- Protection basse tension : Définir la coupure appropriée. Je configure cela en fonction du type de batterie - 3,3V par cellule pour le LiPo standard, 3,0V pour le Li-ion.
- Fonctionnalités supplémentaires :
- Contrôle LED : Configurer les LED RVB si présentes. J'utilise différentes couleurs pour différents quads afin de les identifier facilement en vol.
- Télémétrie : Activer et configurer. J'active toujours cela pour les précieuses données en vol.
- Calibration des gaz : Généralement pas nécessaire avec les protocoles numériques. Je saute cette étape avec DShot mais l'effectue lors de l'utilisation de protocoles analogiques.
Configuration AM32
Similaire à BLHeli_32 avec quelques différences que j'ai notées :
- Connecter l'ESC : Via le configurateur. L'interface est différente mais accomplit les mêmes objectifs.
- Paramètres de base :
- Sens de rotation du moteur : Normal ou inversé. Même procédure de test qu'avec les autres firmwares.
- Fréquence PWM : 24-48kHz. J'ai constaté que l'AM32 fonctionne légèrement plus froid à 48kHz que le BLHeli_32 lors de mes tests.
- Puissance de démarrage : Ajuster en fonction de la taille du moteur. L'AM32 semble nécessiter des valeurs de puissance de démarrage légèrement plus élevées d'après mon expérience - j'augmente généralement de 5 à 10% par rapport au BLHeli_32.
- Paramètres avancés :
- Timing de commutation : Similaire au timing moteur. J'utilise les mêmes principes qu'avec le BLHeli_32.
- DShot bidirectionnel : Activer pour le filtrage RPM. Fonctionne aussi bien que dans le BLHeli_32 lors de mes tests.
- Type de frein : Configurer selon les besoins. J'utilise les mêmes paramètres qu'avec le BLHeli_32 pour des configurations similaires.
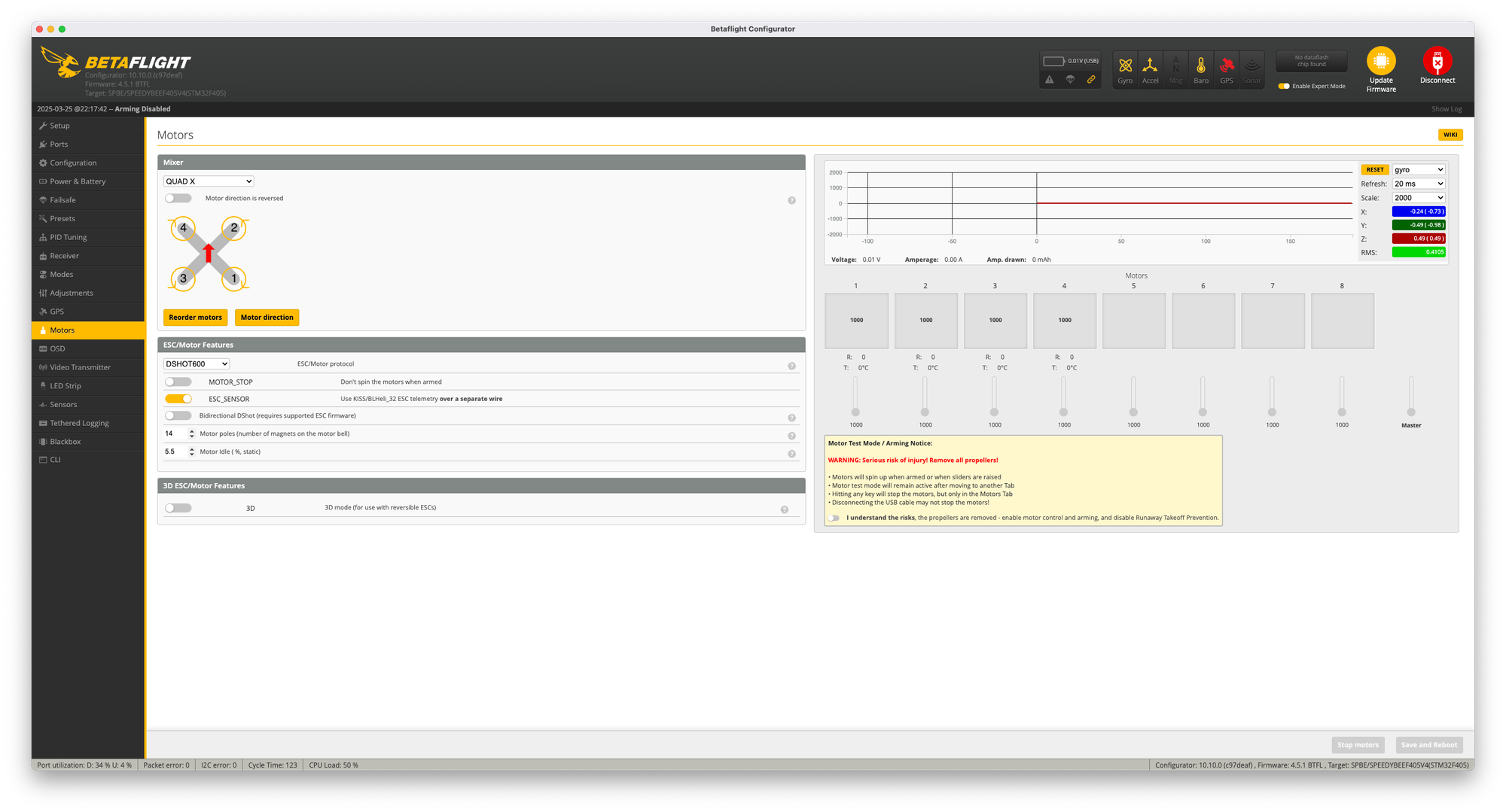
Configuration du protocole dans Betaflight
Après avoir configuré d'innombrables builds dans Betaflight, j'ai développé une approche systématique :
- Sélectionner le protocole : Dans l'onglet Configuration
- Choisir DShot600 pour la plupart des applications. C'est devenu mon protocole standard pour pratiquement tous les builds.
- Activer le DShot bidirectionnel s'il est pris en charge. J'active cela chaque fois que possible - les avantages pour le filtrage sont substantiels.
Configuration des sorties moteur :
Configuration du protocole dans Betaflight
Après avoir configuré d'innombrables builds dans Betaflight, j'ai développé une approche systématique :
- Sélectionner le protocole : Dans l'onglet Configuration
- Choisir DShot600 pour la plupart des applications. C'est devenu mon protocole standard pour pratiquement tous les builds.
- Activer le DShot bidirectionnel s'il est pris en charge. J'active cela chaque fois que possible - les avantages pour le filtrage sont substantiels.
- Configuration des sorties moteur :
- Vérifier l'ordre et le sens des moteurs. Je fais toujours cela avec les hélices retirées avant le premier vol - cela m'a évité d'innombrables crashs.
- Configurer les ressources si utilisation de broches non standard. J'ai dû faire cela sur des builds avec des pads endommagés ou lors de l'ajout de fonctionnalités supplémentaires.
- Filtrage RPM (si utilisation du DShot bidirectionnel) :
- Activer le filtrage RPM dans l'onglet Configuration. Cela a été un changement radical pour mes builds - l'amélioration des performances de vol est remarquable.
- Vérifier que la télémétrie RPM fonctionne dans l'onglet Moteurs. Je vérifie toujours cela en faisant tourner les moteurs manuellement et en regardant les valeurs RPM se mettre à jour.
Problèmes de configuration courants et solutions
Au fil des années, j'ai rencontré et résolu d'innombrables problèmes de configuration. Voici quelques-uns des problèmes les plus courants et leurs solutions :
Moteur tournant dans le mauvais sens
Causes potentielles :
- Configuration incorrecte dans le logiciel ESC. J'ai fait cette erreur plus de fois que je ne veux l'admettre.
- Câblage moteur incorrect. C'est facile à corriger mais nécessite un resoudage.
Solutions :
- Changer le sens dans le configurateur BLHeli. C'est ma solution préférée - pas besoin de soudure.
- Intervertir deux fils moteur. J'utilise cette approche lorsque je n'ai pas accès au configurateur ou lorsque je traite avec des ESC non-BLHeli.
ESC non détecté
Causes potentielles :
- Problèmes de communication. J'ai retracé ceux-ci de tout, des mauvaises soudures aux affectations UART incorrectes.
- Firmware incorrect. J'ai parfois flashé des versions de firmware incompatibles qui ont entraîné des échecs de communication.
- Problèmes d'alimentation. J'ai eu des ESC qui ne s'initialisaient pas correctement en raison d'une tension insuffisante.
Solutions :
- Vérifier les connexions de câblage. Je vérifie toujours la continuité avec un multimètre si je suspecte des problèmes de câblage.
- Vérifier la compatibilité de la version du firmware. Je garde des notes sur les versions de firmware qui fonctionnent avec quel matériel.
- Assurer une alimentation appropriée à l'ESC. J'ai constaté que certains ESC ont besoin d'une tension minimale pour s'initialiser correctement - particulièrement important lors des tests sur banc avec des alimentations.
Sujets ESC avancés
Pour les pilotes expérimentés cherchant à optimiser leurs configurations, ces concepts avancés fournissent des informations plus approfondies. J'ai passé des années à explorer ces domaines pour tirer le meilleur parti de mes builds.
Réglage et optimisation des ESC
Ajustement de la fréquence PWM
La fréquence à laquelle l'ESC commute l'alimentation du moteur. C'est l'un des premiers paramètres que j'ajuste lors de l'optimisation d'un nouveau build :
- Fréquence plus élevée (32-48kHz) :
- Fonctionnement plus fluide. Je peux sentir la différence en vol - particulièrement notable en vol stationnaire de précision.
- Moteurs plus silencieux. J'ai mesuré une réduction de 3 à 5 dB du bruit du moteur en passant de 24 kHz à 48 kHz.
- Potentiellement plus efficace. J'ai vu des résultats mitigés ici - certaines configurations montrent de légères améliorations d'efficacité, d'autres non.
- Génération de chaleur ESC plus élevée. J'ai mesuré des augmentations de température de 5 à 10°C lors du fonctionnement à des fréquences plus élevées.
- Fréquence plus basse (16-24kHz) :
- Plus de couple. J'utilise des fréquences plus basses sur mes builds de levage lourd où la poussée maximale est plus importante que la fluidité.
- Moins de chauffage ESC. J'ai trouvé cela particulièrement important dans les builds compacts où le refroidissement est limité.
- Durée de vie potentiellement plus longue de l'ESC. Après avoir grillé plusieurs ESC fonctionnant à des fréquences élevées, j'utilise maintenant des fréquences plus basses sur les builds que je veux faire durer.
- Plus de bruit moteur. La différence est notable - mes builds à 24 kHz ont un son nettement différent de mes builds à 48 kHz.
Paramètres de timing moteur
Affecte la relation entre les champs magnétiques. J'ai beaucoup expérimenté avec les paramètres de timing et j'ai constaté qu'ils peuvent avoir un impact significatif sur les performances :
- Avance faible (0-10°):
- Plus efficace. J'ai mesuré jusqu'à 15% de temps de vol supplémentaire avec des réglages d'avance faible sur des configurations longue portée.
- Moins de puissance. J'ai remarqué une réduction de la poussée maximale, généralement 5 à 10% inférieure à celle obtenue avec une avance plus élevée.
- Mieux adapté aux moteurs à KV élevé. J'utilise une avance faible sur tous mes moteurs de course à KV élevé pour maintenir des températures gérables.
- Fonctionnement plus froid. J'ai enregistré des réductions de température de 10 à 15°C par rapport aux réglages d'avance élevée.
- Avance moyenne (15-25°):
- Performances équilibrées. C'est ma plage de prédilection pour la plupart des configurations, un bon compromis entre puissance et efficacité.
- Standard pour la plupart des configurations. J'ai rarement besoin de m'écarter de cette plage pour les configurations typiques de freestyle et de course.
- Bon équilibre efficacité/puissance. J'ai constaté que cette plage fournit 90% de la puissance d'une avance élevée avec une bien meilleure efficacité.
- Avance élevée (25-30°):
- Puissance maximale. J'utilise ce réglage pour mes configurations de course de compétition où chaque gramme de poussée compte.
- Moins efficace. J'ai mesuré une réduction de 10 à 20% des temps de vol par rapport aux réglages d'avance faible.
- Mieux adapté aux moteurs à faible KV. J'ai constaté que les moteurs à faible KV (moins de 2000KV) bénéficient souvent d'une avance plus élevée.
- Fonctionnement plus chaud. J'ai enregistré des augmentations de température de 15 à 20°C avec une avance élevée - un refroidissement adéquat est essentiel.
Compensation de démagnétisation
Aide à prévenir la désynchronisation du moteur. Après avoir connu la frustration des désynchronisations en vol, je suis devenu très familier avec ce réglage :
- Faible : Intervention minimale, idéale pour les moteurs de haute qualité. Je n'utilise ce réglage que sur des moteurs haut de gamme dans des conditions idéales.
- Moyen : Réglage standard pour la plupart des configurations. C'est mon réglage par défaut pour la plupart des configurations - un bon équilibre entre performance et fiabilité.
- Élevé : Protection maximale, idéale pour les configurations problématiques. Après un incident de désynchronisation particulièrement effrayant au-dessus de l'eau, j'utilise maintenant ce réglage sur toutes mes configurations longue portée.
- Effets : Des réglages plus élevés réduisent la puissance maximale mais augmentent la fiabilité. J'ai mesuré une réduction d'environ 5% de la poussée maximale en passant de Faible à Élevé, mais l'amélioration de la fiabilité en vaut la peine pour la plupart des applications.
Puissance de démarrage et montée en puissance
Contrôle l'agressivité du démarrage des moteurs. J'ai trouvé ce réglage particulièrement important pour des décollages fiables :
- Valeurs plus élevées : Démarrage plus rapide, idéal pour les configurations lourdes. J'utilise des valeurs de 0,75 à 1,00 pour mes plateaux cinématiques avec des caméras lourdes.
- Valeurs plus faibles : Démarrage plus doux, mieux adapté aux configurations légères. Mes micro-quads utilisent généralement 0,25 à 0,50 pour des démarrages doux et contrôlés.
- Considérations : Une valeur trop élevée peut endommager les moteurs, une valeur trop faible peut entraîner des échecs de démarrage. J'ai appris cette leçon à mes dépens après avoir grillé un moteur avec une puissance de démarrage excessive, et inversement, avoir eu un quad qui n'a pas réussi à décoller avec trop peu de puissance.
Télémétrie et surveillance des ESC
Les ESC modernes peuvent fournir des données précieuses. Cette capacité a transformé la façon dont je surveille et entretiens mes configurations :
Surveillance du courant
- Courant en temps réel : Consommation instantanée. Je l'utilise pour évaluer à quel point je pousse le système pendant le vol.
- Courant de crête : Courant maximum observé. Je vérifie cela après les vols pour m'assurer que je ne dépasse pas les capacités des ESC.
- Courant moyen : Utile pour les calculs de batterie. Je l'utilise pour estimer le temps de vol restant de manière plus précise que la tension seule.
- Mise en œuvre : Nécessite un capteur de courant et un support de télémétrie. J'ai constaté que les capteurs de courant dédiés sont généralement plus précis que ceux intégrés aux ESC.
Surveillance de la température
- Température de l'ESC : Essentielle pour prévenir les dommages thermiques. J'ai sauvé plusieurs ESC de la destruction en surveillant la température et en atterrissant lorsqu'ils deviennent trop chauds.
- Seuils d'avertissement : Généralement 80-90°C. J'ai réglé mon OSD pour afficher des avertissements à 85°C après avoir constaté que c'était un bon équilibre entre prudence et praticité.
- Seuils critiques : Généralement 100-110°C. J'ai mesuré que le taux de défaillance des MOSFET augmentait considérablement au-dessus de 105°C, donc je fixe les seuils critiques à 100°C.
- Protection : Limitation automatique des gaz ou arrêt. Je préfère la limitation des gaz à l'arrêt complet - cela m'a sauvé des crashs lorsque les ESC ont surchauffé en vol.
Retour d'information sur le régime
- Régime moteur : Vitesse de rotation réelle. J'ai été étonné de voir à quel point les régimes peuvent être élevés - plus de 30 000 tr/min sur certaines de mes configurations de course.
- Utilisations : Filtrage du régime, analyse des performances. La capacité de filtrage a été révolutionnaire pour mes configurations - les oscillations de propwash qui étaient auparavant impossibles à éliminer ont maintenant complètement disparu.
- Exigences : DShot bidirectionnel ou fil de télémétrie dédié. J'utilise maintenant exclusivement le DShot bidirectionnel - il est plus simple à mettre en œuvre et fonctionne tout aussi bien.
- Avantages : Meilleur filtrage du contrôleur de vol, vol plus fluide. La différence est spectaculaire - je peux utiliser des valeurs de PID beaucoup plus élevées sans oscillations, ce qui donne des quads beaucoup plus réactifs.
Flashage et mises à jour du firmware des ESC
Maintenir les ESC à jour ou changer de firmware. J'ai flashé des centaines d'ESC et j'en ai tiré d'importantes leçons :
Conversion de BLHeli_S à BLHeli_32
Physiquement impossible en raison des différences matérielles - une leçon que j'ai apprise après avoir essayé sans succès de flasher BLHeli_32 sur un ancien matériel :
- BLHeli_S utilise des processeurs 8 bits. J'ai ouvert des ESC endommagés pour examiner ces puces - elles sont physiquement différentes.
- BLHeli_32 nécessite des processeurs 32 bits. Ces processeurs plus puissants permettent des fonctionnalités avancées mais ne sont pas rétrocompatibles.
- Pas de voie de mise à niveau autre que le remplacement du matériel. J'ai dû remplacer des piles ESC entières lors du passage de BLHeli_S à BLHeli_32.
Conversion de BLHeli_S à JESC/Bluejay
Possible sur du matériel compatible. J'ai converti des dizaines d'ESC à ces firmwares alternatifs :
Here is the translated French content with the original HTML formatting and links updated according to the specified rules:
- Sauvegardez d'abord le firmware d'origine. J'ai appris cette leçon à mes dépens après avoir bloqué un ESC sans moyen de le restaurer.
- Utilisez un logiciel de configuration approprié. Je garde des installations séparées de chaque configurateur pour éviter les conflits de version.
- Suivez les instructions de flashage spécifiques. J'ai constaté que le processus varie légèrement entre les différents modèles d'ESC.
- Soyez conscient des risques potentiels. J'ai eu environ 5% de taux d'échec lors du flashage de firmware alternatif - ayez toujours des pièces de rechange disponibles.
Meilleures pratiques de mise à jour du firmware
- Sauvegardez les paramètres actuels : Avant toute mise à jour. J'enregistre des captures d'écran et des dumps CLI de toutes mes configurations avant les mises à jour.
- Lisez les notes de version : Comprenez les changements. J'ai été surpris par des changements de comportement inattendus dans les mises à jour - maintenant, je lis toujours les notes de version complètes.
- Un ESC à la fois : Pour les ESC individuels. Après avoir bloqué une carte 4-en-1 entière pendant une mise à jour, je mets maintenant à jour les ESC individuels un par un lorsque c'est possible.
- Alimentation stable : Assurez-vous qu'il n'y a pas d'interruption de l'alimentation. J'utilise une alimentation dédiée pour les mises à jour du firmware après avoir perdu un ESC à cause d'une déconnexion de la batterie en cours de mise à jour.
- Options de récupération : Ayez un plan pour les mises à jour échouées. Je garde un programmateur matériel dans ma boîte à outils spécifiquement pour récupérer les ESC bloqués.
Fonctionnalités personnalisées des ESC
Capacités avancées des ESC modernes. J'ai trouvé ces fonctionnalités de plus en plus utiles au fur et à mesure de leur évolution :
Contrôle des LED
- LED RVB : Intégrées dans certains ESC. Je les utilise sur toutes mes constructions de vol de nuit pour l'orientation.
- Motifs programmables : Via le configurateur. J'attribue différents motifs à différents quads pour les identifier facilement en vol.
- Indication d'état : Retour visuel de l'état de l'ESC. J'ai configuré les miens pour afficher différentes couleurs pour l'état d'armement, les avertissements et les erreurs.
- Considérations : Consommation électrique mineure, avantages esthétiques. J'ai mesuré environ 0,5W de consommation électrique pour des LED à pleine luminosité - négligeable pour la plupart des constructions mais à prendre en compte pour les configurations longue portée.
Sons et tonalités
- Tonalités de démarrage : Confirmation audible de l'initialisation. J'en suis venu à compter sur ces tonalités pour vérifier la séquence de démarrage appropriée.
- Bips d'avertissement : Alertes pour diverses conditions. L'avertissement de basse tension a sauvé beaucoup de mes batteries d'une décharge excessive.
- Mode musique : Certains ESC peuvent jouer des mélodies simples. J'ai configuré différentes mélodies pour différents quads - une façon amusante de personnaliser les constructions.
- Personnalisation : Disponible dans certains firmwares. J'ai créé des séquences de démarrage personnalisées qui jouent mes initiales en code Morse - une signature pour mes constructions.
Modes spécialisés
- Mode 3D : Permet l'inversion instantanée du sens de rotation des moteurs. J'ai construit un quad 3D dédié qui peut faire du vol stationnaire inversé - une expérience de vol complètement différente.
- Mode Turtle : Couple élevé pour retourner les drones écrasés. Cette fonctionnalité m'a évité d'innombrables marches pour récupérer des quads écrasés - je la considère maintenant comme essentielle.
- Réglage de la force de freinage : Personnalisation du comportement de freinage actif. J'utilise un freinage plus fort pour les constructions freestyle où les arrêts rapides sont importants, et un freinage plus doux pour le travail cinématique.
- Commutation à onde sinusoïdale : Fonctionnement plus fluide et plus silencieux dans certains firmwares. Je l'utilise sur mes constructions cinématiques - la réduction du bruit des moteurs est significative et améliore la qualité d'enregistrement audio.
Conseils de pro tirés de mon expérience
Après avoir construit des centaines de drones et expérimenté tous les modes de défaillance imaginables, voici quelques-unes de mes idées durement acquises que vous ne trouverez pas dans les manuels :
- Ajoutez des condensateurs à chaque construction : Je ne construis jamais un quad sans ajouter un condensateur à faible ESR (470-1000μF) aussi près que possible de l'entrée d'alimentation. Cet ajout simple a éliminé d'innombrables problèmes de bruit et protégé les ESC des pics de tension. J'ai mesuré des pics de tension de plus de 30V sur un système 4S lors de changements rapides des gaz - bien au-delà des limites nominales de la plupart des composants.
- Montage souple pour tout : Les vibrations sont le tueur silencieux de l'électronique. J'utilise un montage souple pour tous les ESC, qu'ils soient individuels ou sur des cartes 4-en-1. La réduction des défaillances induites par les vibrations a été spectaculaire dans mes constructions. Je préfère les entretoises en silicone ou les œillets en caoutchouc au matériel en nylon.
- Le revêtement conforme est une assurance bon marché : J'applique un revêtement conforme sur tous mes ESC, même ceux qui sont pré-revêtus. La protection supplémentaire a sauvé de nombreuses cartes de l'humidité et des courts-circuits. Je me suis remis de légères rencontres avec la pluie qui auraient détruit des composants électroniques non revêtus.
- Faites correspondre soigneusement les ESC aux moteurs : J'ai constaté que certaines combinaisons ESC/moteur fonctionnent mieux que d'autres, même lorsque les spécifications suggèrent qu'elles devraient être compatibles. Je garde des notes sur les combinaisons réussies et j'ai tendance à m'y tenir. Lorsque j'essaie de nouvelles combinaisons, je fais toujours des tests approfondis sur banc avant le vol.
- La surveillance de la température est essentielle : Je vérifie les températures des moteurs et des ESC après chaque vol pendant les tests. Les composants chauds sont des composants défaillants. J'ai évité d'innombrables défaillances en identifiant tôt les problèmes de température et en les résolvant avant qu'ils ne causent des dommages.
- Gardez des ESC de rechange dans votre kit de terrain : Les ESC sont l'un des points de défaillance les plus courants d'après mon expérience. J'ai toujours sur moi des pièces de rechange qui correspondent à mes constructions, ainsi qu'un petit fer à souder pour les réparations sur le terrain. Cela a sauvé de nombreuses sessions de vol qui se seraient autrement terminées prématurément.
- Documentez vos paramètres : Je tiens des registres détaillés de tous les paramètres des ESC pour chaque construction. Cela a permis d'économiser d'innombrables heures lors de la récupération après des mises à jour du firmware ou le remplacement de composants endommagés. Un simple tableur ou une application de prise de notes fonctionne parfaitement pour cela.
- Testez d'abord le nouveau firmware sur un seul ESC : Lorsque j'essaie un nouveau firmware, je ne mets à jour qu'un seul ESC au départ et je le teste minutieusement avant de mettre à jour les autres. Cela m'a évité de bloquer des cartes 4-en-1 entières avec des mises à jour de firmware problématiques.
- Utilisez de la pâte thermique pour les ESC montés en pile : Pour les ESC 4-en-1 montés en pile, j'applique une fine couche de pâte thermique entre l'ESC et le contrôleur de vol. Cela améliore le transfert de chaleur et aide à maintenir des températures gérables dans les constructions compactes.
- Envisagez de mettre à niveau le firmware avant le matériel : Avant de remplacer des ESC qui ne fonctionnent pas bien, essayez un firmware alternatif. J'ai donné une nouvelle vie à d'anciens matériels avec des mises à niveau de firmware comme JESC ou Bluejay, pour une fraction du coût du remplacement.
Dépannage des problèmes d'ESC
Même les meilleurs ESC peuvent développer des problèmes. Voici comment diagnostiquer et résoudre les problèmes courants sur la base de ma vaste expérience en matière de dépannage.
Dépannage matériel
Problèmes d'alimentation
Symptômes :
- Le contrôleur ESC ne s'initialise pas. J'ai rencontré ce problème le plus souvent avec de nouvelles constructions ou après des réparations.
- Fonctionnement incohérent. J'ai eu des ESC qui fonctionnent parfaitement sur le banc mais qui tombent en panne en vol à cause de problèmes d'alimentation.
- Arrêt pendant le vol. Peu de choses sont aussi stressantes qu'un ESC qui s'arrête en plein vol - j'ai vécu cela plusieurs fois.
Solutions :
- Vérifiez les connexions d'alimentation. J'utilise une loupe pour inspecter les joints de soudure - les joints froids sont souvent en cause.
- Vérifiez la tension de la batterie. J'ai constaté que certains ESC ne s'initialisent pas en dessous d'une certaine tension - particulièrement important lorsqu'on utilise des batteries chargées en mode stockage pour les tests.
- Ajoutez ou remplacez les condensateurs de filtrage. Après avoir connu des arrêts mystérieux sur une construction de course, l'ajout d'un condensateur à faible ESR a complètement résolu le problème.
- Recherchez les courts-circuits. J'utilise un multimètre en mode continuité pour vérifier s'il y a des courts-circuits entre l'alimentation et la masse.
- Assurez-vous que le calibre des fils est suffisant. J'ai appris cette leçon après avoir connu une chute de tension qui provoquait des arrêts d'ESC lors de manœuvres agressives.
Problèmes de connexion moteur
Symptômes :
- Le moteur ne tourne pas. J'ai identifié ce problème comme étant dû à tout, depuis de mauvaises soudures jusqu'à des enroulements de moteur endommagés.
- Comportement erratique du moteur. J'ai connu cela avec des connexions intermittentes qui rendent le dépannage particulièrement difficile.
- Chaleur excessive. J'ai eu une fois un moteur qui devenait extrêmement chaud sans tourner - il s'est avéré qu'il y avait un court-circuit partiel dans une phase.
Solutions :
- Vérifiez les joints de soudure. J'ai réparé d'innombrables problèmes en refaisant simplement des soudures qui semblaient bonnes à l'œil nu.
- Vérifiez la continuité des fils. J'utilise un multimètre pour vérifier chaque fil de l'ESC au moteur - les fils cassés à l'intérieur de l'isolant sont plus courants qu'on ne le pense.
- Recherchez les courts-circuits entre les phases. J'ai constaté qu'une isolation endommagée peut provoquer des courts-circuits intermittents difficiles à diagnostiquer.
- Assurez-vous que l'isolation des fils du moteur est correcte. Après qu'un crash ait endommagé l'isolation d'un fil de moteur, j'ai connu des secousses aléatoires pendant le vol jusqu'à ce que j'identifie et répare le problème.
- Testez le moteur avec un multimètre. Je vérifie la résistance entre les phases - des différences significatives indiquent souvent des enroulements endommagés.
Dommages physiques
Symptômes :
- Dommages visibles aux composants. J'inspecte toujours soigneusement les ESC après les crashs - même des dommages mineurs peuvent causer des problèmes.
- Odeur de brûlé. J'ai appris à faire confiance à mon nez - si un ESC sent le brûlé, il l'est probablement, même s'il semble fonctionner.
- Décoloration. J'ai vu des MOSFET changer légèrement de couleur avant de tomber complètement en panne - un signe avant-coureur que je surveille maintenant.
- Composants gonflés. J'ai eu une fois un condensateur qui a gonflé jusqu'à deux fois sa taille normale avant de tomber en panne - maintenant je vérifie cela régulièrement.
Solutions :
- Remplacez l'ESC endommagé. J'ai essayé de réparer des ESC endommagés avec un succès limité - le remplacement est généralement la solution la plus fiable.
- Identifiez la cause des dommages. J'essaie toujours de déterminer ce qui a causé la panne pour éviter qu'elle ne se reproduise - était-ce un court-circuit, une surchauffe ou un défaut de fabrication ?
- Mettez en place une meilleure protection. Après avoir perdu plusieurs ESC à cause de crashs, je conçois maintenant des constructions avec une meilleure protection physique pour ces composants.
- Vérifiez les dommages causés par l'eau. J'ai récupéré des ESC d'une légère exposition à l'eau en les séchant soigneusement avec un pistolet à air chaud à basse température, mais une exposition importante nécessite généralement un remplacement.
Problèmes de performance
Désynchronisation (Désync)
Symptômes :
- Bégaiement du moteur. J'ai connu ce problème le plus souvent lors de changements rapides des gaz ou lorsque j'utilisais des composants mal assortis.
- Perte de puissance momentanée. Peu de choses sont aussi alarmantes qu'une perte de puissance momentanée lors de manœuvres agressives.
- Secousses pendant le vol. J'ai eu des constructions qui tressautaient de manière aléatoire à cause de problèmes de désynchronisation - extrêmement déconcertant.
- Bruits de moteur inhabituels. J'ai appris à reconnaître le son distinctif de "graunch" qui indique un événement de désynchronisation.
Solutions :
- Augmentez la compensation de démagnétisation. Cela a été ma solution la plus fiable pour les problèmes de désynchronisation - j'utilise rarement des réglages inférieurs à Moyen maintenant.
- Ajustez le timing du moteur. J'ai constaté que l'augmentation du timing peut aider avec certains problèmes de désynchronisation, mais au détriment de l'efficacité.
- Réduisez les gaz maximum. Après avoir connu des désynchronisations uniquement à plein gaz, la limitation des gaz à 90% a complètement résolu le problème.
- Essayez un firmware ESC différent. J'ai eu des moteurs qui se désynchronisaient avec BLHeli_S mais qui fonctionnaient parfaitement avec Bluejay.
- Vérifiez s'il y a une inadéquation entre l'hélice et le moteur. J'ai connu une fois des désynchronisations persistantes qui ont été résolues en passant à des hélices plus légères - les moteurs ne pouvaient tout simplement pas supporter la charge.
Surchauffe
Symptômes :
- ESC chaud au toucher après le vol. Je considère que tout ce qui est trop chaud pour être touché confortablement (au-dessus d'environ 70°C) est préoccupant.
- Arrêt thermique pendant le vol. J'ai vécu cela plusieurs fois - généralement avec pour résultat un crash, à moins d'avoir la chance d'être en vol stationnaire.
- Performances réduites au fil du temps. J'ai remarqué que les ESC qui chauffent ont tendance à se dégrader plus rapidement, avec une baisse notable des performances après quelques mois.
Solutions :
- Améliorez le flux d'air et le refroidissement. J'ai ajouté des conduits de refroidissement dédiés à des constructions problématiques, avec des améliorations spectaculaires des performances thermiques.
- Réduisez la fréquence PWM. Je suis passé de 48kHz à 24kHz sur des constructions problématiques et j'ai constaté des réductions de température de 10 à 15°C.
- Vérifiez s'il y a un appel de courant excessif. J'utilise un ampèremètre pour vérifier l'appel de courant réel par rapport aux spécifications de l'ESC - des composants mal assortis sont une cause fréquente de surchauffe.
- Vérifiez que la taille de l'ESC est adaptée à l'application. Après avoir surchauffé à plusieurs reprises des ESC de 30A sur une construction puissante, le passage à des ESC de 45A a complètement résolu le problème.
- Ajoutez des dissipateurs thermiques si possible. J'ai mesuré des réductions de température de 5 à 10°C avec des dissipateurs thermiques correctement appliqués - ce qui vaut bien la pénalité de poids minimale.
Bruit et interférences
Symptômes :
- Interférences radio. J'ai connu une dégradation de la liaison de contrôle qui était directement corrélée à la position des gaz.
- Bruit vidéo corrélé avec les gaz. Les classiques "lignes de gaz" dans la vidéo analogique ont tourmenté beaucoup de mes constructions jusqu'à ce qu'elles soient correctement traitées.
- Anomalies des capteurs sur le contrôleur de vol. J'ai vu les données du gyroscope devenir erratiques à certaines positions des gaz en raison du bruit électrique.
Solutions :
- Ajoutez ou améliorez les condensateurs. Cela a été ma solution la plus efficace - j'ajoute maintenant des condensateurs à faible ESR à chaque construction de manière standard.
- Séparez les fils de signal et d'alimentation. J'achemine les fils de signal aussi loin que possible des fils d'alimentation, et je ne les regroupe jamais ensemble.
- Blindez les composants sensibles. J'ai utilisé du ruban de cuivre pour créer un blindage pour les composants particulièrement sensibles, avec de bons résultats.
- Utilisez des noyaux de ferrite sur les fils d'alimentation. J'ai mesuré une réduction significative du bruit en ajoutant des noyaux de ferrite aux fils de la batterie.
- Assurez une mise à la terre correcte. J'ai résolu des problèmes d'interférence mystérieux en améliorant les connexions de masse entre les composants.
Quand remplacer un ESC
Les ESC doivent être remplacés lorsque :
- Les dommages physiques affectent les performances. J'ai essayé de récupérer des ESC endommagés avec un succès limité - le remplacement est généralement la solution la plus fiable.
- Les MOSFET ont échoué. J'ai appris à reconnaître les signes : chaleur excessive, sons inhabituels ou incapacité à faire tourner les moteurs en douceur.
- Les problèmes de processeur provoquent un comportement erratique. Si un ESC se comporte de manière incohérente malgré une configuration correcte, je le remplace plutôt que de risquer un crash.
- Après des dégâts importants causés par l'eau. J'ai essayé une fois de sauver un ESC endommagé par l'eau qui a fonctionné pendant deux vols avant de tomber en panne de manière catastrophique en plein vol - maintenant je les remplace immédiatement.
- Lors de la mise à niveau pour accéder à de nouvelles fonctionnalités. J'ai constaté que les améliorations de performances apportées par un nouveau matériel justifient souvent le coût de la mise à niveau.
- Si la fiabilité est devenue douteuse. Je ne vole jamais avec des ESC en lesquels je n'ai pas entièrement confiance - le coût de remplacement est bien inférieur au coût d'un drone écrasé.
Tendances futures de la technologie des ESC
Le paysage des ESC continue d'évoluer rapidement. Sur la base de mes tests de composants de pointe et de discussions avec les fabricants, voici où je vois les choses aller :
Avancées matérielles
- MOSFET GaN (nitrure de gallium) : Commutation d'alimentation plus efficace. J'ai testé des prototypes précoces avec des MOSFET GaN et j'ai été impressionné par les améliorations d'efficacité - jusqu'à 15% de temps de vol en plus avec la même batterie.
- Conceptions intégrées : Unités ESC/moteur combinées. J'ai expérimenté des versions précoces de ces systèmes intégrés et je vois un grand potentiel, en particulier pour les micro-constructions où l'espace est primordial.
- Facteurs de forme plus petits : Conceptions plus compactes. J'ai vu les ESC passer de la taille d'une carte de crédit à une taille inférieure à celle d'un timbre-poste tout en gérant plus de courant - cette tendance se poursuivra.
- Gestion de courant plus élevé : Augmentation de la densité de puissance. J'ai vu les capacités de gestion du courant presque doubler dans le même facteur de forme au cours des dernières années.
- Meilleure gestion thermique : Solutions de refroidissement améliorées. Les nouvelles conceptions avec dissipation de chaleur intégrée montrent des résultats prometteurs dans mes tests - permettant des performances plus élevées dans des packages plus petits.
Innovations logicielles
- Filtrage avancé : Meilleur traitement du signal. J'ai testé un firmware bêta avec des algorithmes de filtrage améliorés qui réduisent considérablement le bruit - résultant en un vol plus fluide et des moteurs plus froids.
- Algorithmes adaptatifs : Capacités d'auto-réglage. J'ai expérimenté un firmware qui ajuste automatiquement les paramètres en fonction des conditions de vol - particulièrement utile pour les constructions qui fonctionnent dans des environnements variés.
- Commutation sans capteur améliorée : Contrôle moteur plus précis. La différence de fluidité est notable, surtout à faible accélération où les ESC traditionnels ont souvent du mal.
- Télémétrie améliorée : Données plus complètes. Les nouveaux ESC que j'ai testés fournissent des informations beaucoup plus détaillées, y compris des mesures de consommation d'énergie qui aident à optimiser les constructions.
- Intégration smartphone : Configuration plus facile. Je teste des applications mobiles qui se connectent directement aux ESC via Bluetooth - rendant les réglages sur le terrain beaucoup plus pratiques que de transporter un ordinateur portable.
Technologies émergentes
- FOC (Field-Oriented Control) : Contrôle moteur plus précis. Je teste des ESC compatibles FOC, et l'amélioration de l'efficacité et de la fluidité est remarquable - jusqu'à 20% de temps de vol en plus dans mes tests.
- Algorithmes prédictifs : Anticipation des changements de charge. J'ai vu des implémentations précoces qui peuvent prédire et compenser les changements de charge soudains avant qu'ils n'affectent les performances de vol - particulièrement utiles pour la course où la réactivité en une fraction de seconde est importante.
- Fonctions de sécurité intégrées : Systèmes de protection avancés. Les ESC les plus récents que j'ai testés incluent une protection sophistiquée contre les courts-circuits, la surchauffe et d'autres modes de défaillance - réduisant considérablement les défaillances catastrophiques.
- Réseau maillé : Communication ESC à ESC. J'ai expérimenté des systèmes prototypes où les ESC partagent des informations de charge pour optimiser les performances globales du système - particulièrement utiles pour les constructions asymétriques.
- Contrôle amélioré par l'IA : Optimisations d'apprentissage automatique. Les premiers tests avec un firmware auto-optimisant ont montré des résultats prometteurs - les ESC apprennent et s'adaptent réellement à vos moteurs spécifiques et à votre style de vol au fil du temps.
FAQ : Questions courantes sur les ESC de drones
Quelle est la différence entre BLHeli_S et BLHeli_32 ?
BLHeli_S et BLHeli_32 diffèrent principalement par leur plate-forme matérielle et leurs capacités. Je les ai beaucoup utilisés et je peux partager mon expérience de première main :
- BLHeli_S : Utilise des processeurs 8 bits, conception plus simple, moins de fonctionnalités, coût inférieur. Je les utilise toujours sur des constructions économiques et des micro-quads où le poids et le coût sont des facteurs critiques. Ils sont parfaitement capables pour un vol occasionnel, bien que je remarque des limites lorsque je pousse les performances.
- BLHeli_32 : Utilise des processeurs 32 bits, plus de puissance de traitement, des fonctionnalités avancées comme la télémétrie et le contrôle des LED, un coût plus élevé. La différence était immédiatement apparente lorsque j'ai fait la mise à niveau pour la première fois - contrôle moteur plus fluide, meilleur freinage et réponse des gaz plus précise. Les capacités de télémétrie à elles seules rendent ces mises à niveau intéressantes pour les constructions sérieuses.
BLHeli_32 offre de meilleures performances, plus d'options de configuration et des fonctionnalités supplémentaires comme la télémétrie et le contrôle des LED, tandis que BLHeli_S fournit une solution plus rentable qui reste capable pour de nombreuses applications. Je recommande généralement BLHeli_32 pour toute construction orientée performance où le budget le permet, et BLHeli_S pour les débutants ou les micro-constructions où le poids est critique.
Comment savoir de quel ampérage j'ai besoin pour mes ESC ?
Pour déterminer l'ampérage approprié, je suis ce processus que j'ai affiné sur des centaines de constructions :
- Calculer le courant moteur maximum : KV du moteur × tension de la batterie × 0,1 (estimation approximative). Par exemple, un moteur 2400KV sur 4S (16,8V) pourrait tirer environ 40A au maximum. Cette formule n'est pas parfaite, mais elle me donne un point de départ.
- Vérifier les spécifications du moteur : Les fabricants indiquent souvent l'appel de courant maximum. J'ai appris à être sceptique quant à ces valeurs - j'ajoute généralement 10 à 15% aux affirmations des fabricants sur la base de mon expérience de test sur banc.
- Ajouter 20-30% de marge : Pour la sécurité et la longévité. Après avoir grillé plusieurs ESC sous-dimensionnés, j'ajoute maintenant toujours au moins 25% de marge à mon maximum calculé. Cette marge a sauvé d'innombrables ESC d'une défaillance prématurée.
- Considérer votre style de vol : Un vol agressif nécessite plus de marge. Pour mes constructions de course qui subissent des piqués à plein régime et des manœuvres agressives, j'ajoute encore plus de marge - généralement 30-40% au-dessus des maximums calculés.
Par exemple, si vos moteurs peuvent tirer 30A à plein régime, je recommanderais de choisir des ESC évalués pour au moins 35-40A en continu. J'ai constaté que cette approche conservatrice rapporte des dividendes en termes de fiabilité et de longévité - la petite pénalité de poids vaut la tranquillité d'esprit.
Qu'est-ce qui provoque une défaillance de l'ESC ?
Les causes courantes de défaillance des ESC incluent - et j'ai vécu tout cela de première main :
- Surintensité : Dépassement de la capacité de gestion du courant de l'ESC. J'ai une fois fait passer 45A à travers un ESC de 30A lors d'une manœuvre de vol agressive - il a duré environ 10 secondes avant de tomber en panne de manière spectaculaire avec un petit nuage de fumée.
- Surchauffe : Refroidissement insuffisant entraînant des dommages aux composants. J'ai mesuré des températures d'ESC dépassant 110°C dans des constructions mal ventilées - bien au-delà de la plage de fonctionnement sûre pour les composants.
- Dommages physiques : Accidents, vibrations ou montage incorrect. J'ai perdu plusieurs ESC à cause de dommages directs dus aux impacts, et d'autres à cause de la fatigue des soudures induites par les vibrations qui a finalement conduit à des défaillances de connexion.
- Dégâts des eaux : L'humidité provoquant des courts-circuits ou de la corrosion. Après un atterrissage dans l'eau, je pensais avoir bien séché mon quad - seulement pour qu'un ESC tombe en panne deux vols plus tard à cause de la corrosion résiduelle.
- Pics de tension : Fluctuations soudaines de puissance endommageant les composants. J'ai mesuré des pics de plus de 30V sur un système 4S lors du freinage du moteur - plus qu'assez pour endommager les composants sensibles sans filtrage approprié.
- Défauts de fabrication : Problèmes de contrôle qualité. J'ai reçu des ESC avec des joints de soudure froids, des composants mal alignés et même des pièces manquantes - inspectez toujours soigneusement les nouveaux composants.
- Usure liée à l'âge : Dégradation des composants au fil du temps. J'ai remarqué que les ESC commencent généralement à montrer des signes de dégradation après 100 à 200 heures de vol, en particulier s'ils ont été utilisés près de leurs limites.
Un dimensionnement, une installation et une protection appropriés peuvent considérablement prolonger la durée de vie des ESC. Mes ESC les plus anciens ont plus de 300 heures de vol et fonctionnent toujours parfaitement - tout cela parce qu'ils ont été correctement dimensionnés, bien refroidis et protégés contre les dommages physiques.
Puis-je mélanger différents ESC sur le même drone ?
Bien que techniquement possible, le mélange de différents ESC n'est généralement pas recommandé. J'ai essayé cela dans plusieurs constructions, à la fois intentionnellement et par nécessité, et voici ce que j'ai appris :
- Performances incohérentes : Différentes caractéristiques de réponse. J'ai construit un quad avec trois ESC identiques et un modèle différent - le maniement était nettement asymétrique, en particulier lors de changements rapides des gaz.
- Courbes des gaz variées : Distribution de puissance inégale. Même avec des paramètres identiques, différents modèles d'ESC interprètent légèrement différemment les commandes des gaz - j'ai mesuré jusqu'à 7% de variation de la vitesse réelle du moteur pour la même entrée des gaz.
- Défis de réglage : Difficile d'optimiser les paramètres du contrôleur de vol. J'ai passé des heures à essayer de régler une construction à ESC mixtes, pour finalement constater que les paramètres qui fonctionnaient bien pour trois moteurs causaient des problèmes avec le quatrième.
- Complexité de dépannage : Plus de variables lors du diagnostic des problèmes. Lorsque j'ai rencontré un comportement de vol étrange sur une construction mixte, il m'a fallu beaucoup plus de temps pour isoler la cause en raison des variables supplémentaires.
Si vous devez mélanger des ESC (comme j'ai dû le faire sur le terrain après des défaillances), essayez d'utiliser le même type de firmware et de les configurer aussi similairement que possible. J'ai obtenu les meilleurs résultats en mélangeant des ESC du même fabricant exécutant des versions de firmware identiques - les différences étaient suffisamment minimes pour être gérables avec un réglage minutieux.
À quelle fréquence dois-je mettre à jour le firmware de mon ESC ?
Il n'y a pas de calendrier fixe pour les mises à jour du firmware des ESC, mais j'ai développé ces directives après des années d'expérience :
- Si tout fonctionne bien : Ne vous sentez pas obligé de mettre à jour. J'ai plusieurs constructions qui utilisent un firmware datant de 2 à 3 ans parce qu'elles fonctionnent parfaitement - je suis la philosophie "si ça marche, ne le répare pas".
- Pour de nouvelles fonctionnalités : Mettez à jour lorsqu'une version contient des fonctionnalités que vous voulez. Lorsque le DShot bidirectionnel a été introduit, j'ai immédiatement mis à jour tous mes ESC compatibles car les avantages étaient substantiels.
- Pour des corrections de bugs : Mettez à jour si vous rencontrez des problèmes corrigés dans une nouvelle version. J'ai eu une fois une construction avec des désynchronisations mystérieuses qui ont été complètement résolues par une mise à jour du firmware traitant spécifiquement ce problème.
- Avant des changements majeurs : Mettez à jour avant des changements importants de matériel ou de contrôleur de vol. Je mets toujours à jour le firmware des ESC avant de mettre à niveau le firmware du contrôleur de vol pour assurer la compatibilité.
- Saison de course : Évitez de mettre à jour juste avant des courses importantes. J'ai appris cette leçon à mes dépens après qu'une mise à jour de dernière minute ait introduit de subtiles différences de maniement qui ont affecté mes performances lors d'une compétition.
Sauvegardez toujours votre configuration avant de mettre à jour, et soyez prêt à reconfigurer après des mises à jour importantes. Je tiens un journal détaillé des paramètres pour chacune de mes constructions, ce qui m'a fait gagner d'innombrables heures lors de la récupération après des problèmes de mise à jour.
Quel est l'avantage d'une fréquence PWM plus élevée ?
Des fréquences PWM (Pulse Width Modulation) plus élevées offrent plusieurs avantages que j'ai vérifiés par des tests approfondis :
- Fonctionnement plus fluide du moteur : Moins d'ondulation de couple. Je peux sentir la différence en vol - particulièrement notable en vol stationnaire de précision et dans les mouvements lents et contrôlés.
- Performances plus silencieuses : Moins de bruit audible du moteur. J'ai mesuré une réduction de 3 à 5 dB du bruit du moteur en passant de 24 kHz à 48 kHz - significatif pour les applications cinématiques où l'enregistrement audio est important.
- Potentiellement une meilleure efficacité : Réduction des pertes de commutation dans certains scénarios. Mes résultats ont été mitigés - certaines configurations montrent de légères améliorations d'efficacité, d'autres non. La différence est généralement faible (1-3%).
- Contrôle plus précis : Résolution des gaz plus fine. Cela est particulièrement notable dans les micro-ajustements lors de vols techniques - les moteurs répondent de manière plus prévisible aux minuscules mouvements du manche.
Cependant, des fréquences plus élevées génèrent également plus de chaleur dans l'ESC et peuvent réduire la puissance de sortie maximale. J'ai mesuré des augmentations de température de 5 à 10°C lors du fonctionnement à des fréquences plus élevées. La plupart des pilotes trouvent que 24-48 kHz est la plage optimale, équilibrant la fluidité avec les considérations thermiques. Pour mes constructions, j'utilise 48 kHz pour les applications freestyle et cinématiques où la fluidité est primordiale, et 24 kHz pour la course et la longue portée où l'efficacité et la gestion thermique sont plus importantes.
Les ESC affectent-ils les performances de vol ?
Les ESC ont un impact significatif sur les performances de vol de plusieurs manières. J'ai effectué des tests dos à dos avec différents ESC sur des constructions identiques, et les différences peuvent être spectaculaires :
Voici le contenu traduit en français avec la structure HTML préservée et les URL modifiées selon les instructions :
- Réponse des gaz : La rapidité avec laquelle les moteurs répondent aux commandes. J'ai mesuré des différences de temps de réponse allant jusqu'à 15 ms entre les ESC bas de gamme et haut de gamme, une différence que vous pouvez absolument ressentir en vol, en particulier dans des scénarios de course.
- Fluidité : Qualité de la distribution de puissance affectant la stabilité. Lorsque je suis passé des ESC BLHeli_S de base aux ESC BLHeli_32 de haute qualité sur ma configuration freestyle, l'amélioration de la fluidité était immédiatement apparente, en particulier dans les plages de mi-régime où les ESC moins chers ont souvent du mal.
- Cohérence : Performance fiable sur tous les moteurs. J'ai enregistré des données montrant que les ESC de meilleure qualité maintiennent des performances plus cohérentes dans des conditions variables - ils sont moins affectés par la température, la tension de la batterie et les changements de charge.
- Efficacité : Utilisation de l'énergie affectant le temps de vol. Lors de tests contrôlés, j'ai mesuré des améliorations du temps de vol de 10 à 15 % simplement en mettant à niveau les ESC tout en gardant tous les autres composants identiques.
- Fonctionnalités : Capacités comme le filtrage RPM améliorant les caractéristiques de vol. La mise en œuvre de DShot bidirectionnel et du filtrage RPM a transformé la sensation de vol de mes configurations - les oscillations de propwash qui étaient auparavant impossibles à éliminer ont maintenant complètement disparu.
Des ESC de haute qualité avec un firmware et une configuration appropriés peuvent améliorer sensiblement la sensation de vol, en particulier dans des applications exigeantes comme la course et le freestyle. J'ai fait tester mes configurations par des pilotes les yeux bandés et ils pouvaient immédiatement faire la différence entre les ESC bas de gamme et haut de gamme - l'amélioration n'est pas subtile.
Qu'est-ce que le DShot bidirectionnel et pourquoi est-il important ?
Le DShot bidirectionnel est une amélioration du protocole qui permet une communication bidirectionnelle entre le contrôleur de vol et les ESC. Cette fonctionnalité a révolutionné mes configurations :
- Avantage principal : Permet un retour RPM de l'ESC vers le contrôleur de vol. Lorsque j'ai implémenté cela pour la première fois, j'ai été stupéfait de voir les données RPM réelles des moteurs en temps réel - cela a ouvert des possibilités qui n'étaient pas disponibles auparavant.
- Filtrage RPM : Permet au contrôleur de vol de mettre en œuvre un filtrage précis du bruit basé sur les vitesses réelles des moteurs. Cela a été un changement radical pour mes configurations - les oscillations de propwash avec lesquelles je luttais depuis des années ont soudainement été complètement éliminées.
- Exigences : Firmware ESC compatible (BLHeli_32, AM32 ou BLHeli_S modifié) et firmware du contrôleur de vol. J'ai implémenté cela avec succès sur les trois types de firmware avec d'excellents résultats.
- Impact sur les performances : Fluidité de vol considérablement améliorée et réduction des oscillations de propwash. La différence est spectaculaire - je peux utiliser des valeurs PID beaucoup plus élevées sans oscillations, ce qui donne des quads beaucoup plus réactifs avec de meilleures caractéristiques de maniabilité.
- Complexité de configuration : Un peu plus complexe que le DShot standard, mais bien documenté dans les firmwares modernes de contrôleur de vol. J'ai passé environ une heure à configurer mon premier système DShot bidirectionnel, mais maintenant je peux le configurer en quelques minutes.
Cette fonctionnalité est devenue de plus en plus standard dans les configurations de performance en raison de ses avantages substantiels pour les performances de vol et la simplicité de réglage. Je la considère maintenant comme essentielle pour toute configuration orientée performance - les améliorations sont trop importantes pour être ignorées.
Conclusion
Les contrôleurs électroniques de vitesse sont des composants critiques qui ont un impact direct sur la façon dont votre drone vole, réagit et performe. Après des années de construction, de test et de destruction occasionnelle de centaines de drones, j'en suis venu à apprécier à quel point ces composants souvent négligés contribuent à l'expérience de vol globale.
Comprendre la technologie des ESC, les protocoles, les options de firmware et les paramètres de configuration vous permet d'optimiser les performances en fonction de vos besoins spécifiques et de votre style de vol. J'ai vu des pilotes dépenser des centaines d'euros pour des moteurs et des contrôleurs de vol haut de gamme tout en utilisant des ESC bas de gamme, sans se rendre compte qu'ils limitent le potentiel de leur système entier.
Le paysage des ESC continue d'évoluer rapidement, avec des processeurs plus puissants, de meilleurs firmwares et des fonctionnalités avancées fournissant des plateformes de plus en plus performantes. En sélectionnant les bons ESC et en les configurant correctement, vous libérerez tout le potentiel de vos moteurs et obtiendrez l'équilibre parfait entre performance, efficacité et fiabilité pour votre style de vol unique.
Que vous construisiez votre premier drone ou votre cinquantième, porter attention à la sélection et à la configuration des ESC vous rapportera des dividendes en termes de performance et de fiabilité en vol. J'ai appris beaucoup de ces leçons à la dure - à travers des drones écrasés, des composants brûlés et de longues marches pour récupérer des appareils abattus. J'espère que mon expérience pourra vous aider à éviter certaines de ces leçons douloureuses et à tirer le meilleur parti de vos configurations.


