ESCs de Drones: Principios y Funcionamiento
Los controladores electrónicos de velocidad (ESC) son el enlace vital entre su controlador de vuelo y los motores, traduciendo los comandos digitales en la entrega de energía precisa que mantiene su dron en el aire. Después de años construyendo y probando cientos de drones, he llegado a apreciar que estos sofisticados dispositivos son mucho más que simples controladores de motores: son componentes ricos en características con sus propios procesadores, firmware y capacidades que pueden hacer o deshacer su experiencia de vuelo. He aprendido por las malas que una falla del ESC significa más que un simple dron estrellado; a menudo significa una larga caminata a través de un terreno difícil para recuperar lo que queda de su orgullo y alegría.
Esta guía completa explora la tecnología ESC, los protocolos, las opciones de firmware, los criterios de selección y las características avanzadas basadas en mi amplia experiencia práctica. Compartiré no solo las especificaciones técnicas, sino también las ideas prácticas que he obtenido a través de innumerables construcciones, choques y sesiones de resolución de problemas para ayudarlo a comprender y optimizar este componente crítico de su dron FPV.
Introducción a los controladores electrónicos de velocidad
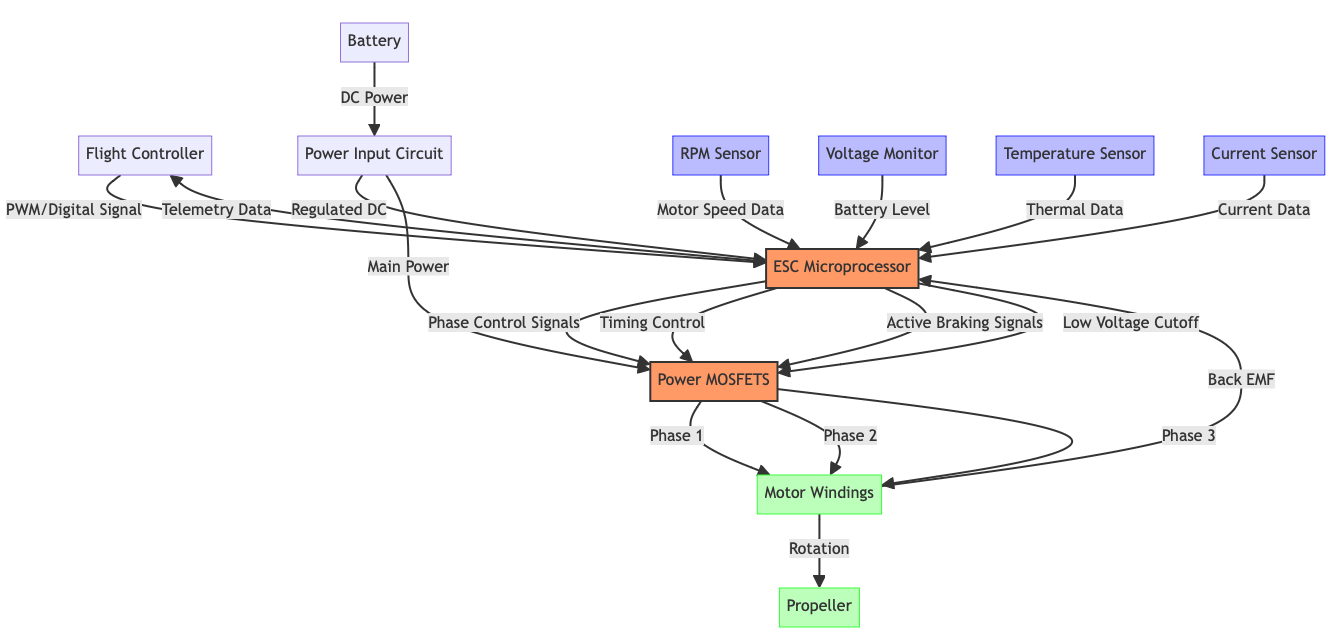
Un ESC es un circuito electrónico que controla y regula la velocidad de un motor sin escobillas. Todavía recuerdo mi primera construcción con ESC primitivos que apenas mantenían los motores girando de manera consistente, muy lejos de los sofisticados dispositivos que usamos hoy. En los drones FPV, los ESC realizan varias funciones críticas que he llegado a apreciar más con cada construcción:
- Control del motor: Convertir la energía de la batería de CC en la energía de CA trifásica requerida por los motores sin escobillas. He visto la diferencia entre los ESC baratos que producen un funcionamiento del motor áspero y ruidoso y los de calidad que brindan una potencia suave y precisa.
- Regulación de velocidad: Controlar con precisión las RPM del motor según los comandos del controlador de vuelo. La capacidad de respuesta de su dron depende en gran medida de la rapidez con la que sus ESC pueden ajustar la velocidad del motor, algo que noto de inmediato al probar una nueva construcción.
- Frenado: Desacelerar o detener activamente los motores cuando sea necesario. He descubierto que esto es particularmente importante para el vuelo estilo libre, donde las paradas rápidas y los cambios de dirección son esenciales.
- Protección de la batería: Monitorear el voltaje e implementar cortes para evitar daños. He salvado innumerables baterías de una muerte prematura gracias a la protección adecuada contra bajo voltaje.
- Telemetría: Proporcionar datos sobre rendimiento, temperatura y RPM (en modelos avanzados). Esta característica ha transformado la forma en que ajusto mis quads, brindando información que era imposible de obtener hace solo unos años.
La evolución de los ESC para drones
He sido testigo de la dramática evolución de los ESC incluso desde 2019 cuando comencé mi pasatiempo, y la progresión ha sido nada menos que notable:
- ESC antiguos (2010-2014): Controladores de motor básicos con características limitadas y firmware SimonK. Estos dispositivos primitivos que requerían una calibración cuidadosa y ofrecían un rendimiento mínimo.
- Era BLHeli (2015-2017): Rendimiento mejorado, protocolos digitales y opciones de configuración. Esto fue un cambio de juego: de repente, las personas podían conectarse a los ESC a través del controlador de vuelo y ajustar la configuración sin soldadura ni programadores de hardware.
- BLHeli_S (2017-2018): Procesamiento mejorado, mejor rendimiento y más características.
- BLHeli_32 (2018-presente): Procesamiento de 32 bits, telemetría y capacidades avanzadas.
- Alternativas modernas (2020+): AM32, JESC y otras opciones de firmware con características únicas. He estado experimentando con estas opciones más nuevas, particularmente AM32, que ha dado nueva vida a algunos de mis hardware más antiguos.
Esta progresión ha llevado a ESC más pequeños y capaces con características y rendimiento cada vez más sofisticados. Personalmente, he pasado de ESC voluminosos y separados que requerían montaje en cada brazo a pequeñas placas de 4 en 1 que pesan menos que un solo ESC antiguo mientras ofrecen mucha más capacidad.
Componentes básicos de un ESC
Los ESC modernos integran varios componentes clave que trabajan juntos para crear la experiencia de vuelo. Permítanme guiarlos a través de lo que he aprendido sobre estos componentes a lo largo de años de construcción y resolución de problemas.
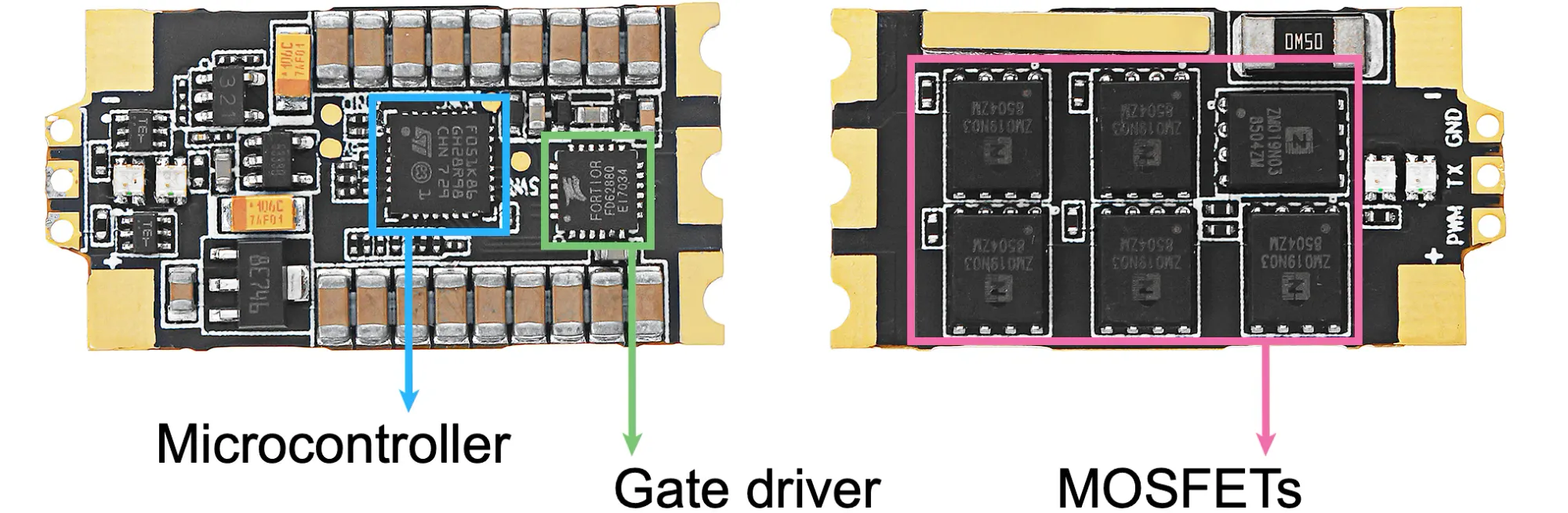
Microprocesador
El cerebro del ESC, procesando comandos y controlando la entrega de energía:
- Procesadores de 8 bits: Se encuentran en ESC más antiguos y modelos BLHeli_S económicos. Comencé con estos, y aunque hicieron el trabajo, las limitaciones fueron frustrantes al impulsar el rendimiento.
- Procesadores de 32 bits: Se utilizan en BLHeli_32 y ESC más nuevos, ofreciendo más potencia de procesamiento. La primera vez que actualicé a un ESC de 32 bits, la diferencia en capacidad de respuesta y características fue inmediatamente notable.
- ARM Cortex: Común en ESC de alto rendimiento, habilitando características avanzadas. Uso estos en mis construcciones de competencia donde cada milisegundo de tiempo de respuesta es importante.
MOSFET (transistores de efecto de campo de semiconductor de óxido metálico)
Componentes de conmutación de energía que controlan el flujo de corriente a las fases del motor. He aprendido que la calidad de los MOSFET es a menudo lo que separa a los ESC premium de las opciones económicas:
- Calidad de los MOSFET: Determina la eficiencia, la generación de calor y el manejo de corriente. He quemado suficientes MOSFET baratos para saber que invertir en calidad aquí da dividendos en confiabilidad y rendimiento.
- Cantidad de MOSFET: Típicamente 6 por motor (2 por fase). Algunas de mis construcciones de alto rendimiento usan ESC con MOSFET duplicados para un mejor manejo de corriente y distribución de calor.
- Disposición de los MOSFET: Afecta el rendimiento y la durabilidad. He notado que los ESC con mejor disposición de MOSFET tienden a funcionar más fríos, incluso bajo cargas pesadas.
Componentes de Soporte
Circuitos adicionales que permiten un funcionamiento adecuado. Estos componentes a menudo pasados por alto pueden hacer una diferencia significativa en el rendimiento:
- Condensadores: Filtran el ruido y suavizan la entrega de energía. Siempre agrego condensadores de filtrado adicionales a mis construcciones después de aprender por las malas cómo el ruido eléctrico puede afectar el rendimiento del vuelo.
- Reguladores de Voltaje: Proporcionan energía adecuada al microprocesador. He tenido ESC que fallaron debido a una mala regulación de voltaje, especialmente cuando se ejecutan configuraciones de voltaje más altas.
- Sensores de Corriente: Miden el consumo de energía (en ESC con capacidad de telemetría). La precisión de estos sensores varía ampliamente: he descubierto que los ESC de gama alta tienden a tener una medición de corriente más precisa.
- Sensores de Temperatura: Monitorean el calor para protección (en modelos avanzados). Esta característica ha salvado a varias de mis construcciones de daños térmicos durante largas sesiones de vuelo de verano.
Interfaces de Entrada/Salida
Conexiones para comunicación y energía:
- Entrada de Señal: Recibe comandos del controlador de vuelo. He descubierto que la calidad de estas conexiones impacta significativamente en la confiabilidad: las juntas de soldadura frías aquí han causado más de unas pocas fallas misteriosas en mis construcciones.
- Conexiones de Energía: Almohadillas de entrada de batería y salida de motor. Siempre uso cable de calibre apropiado aquí: aprendí a través de una falla espectacular que los cables de tamaño insuficiente no pueden manejar las corrientes pico.
- Salida de Telemetría: Envía datos de vuelta al controlador de vuelo (si es compatible). Esta característica transformó la forma en que monitoreo mis quads en vuelo, proporcionando datos en tiempo real que ayudan a prevenir daños en los componentes.
Tipos y Configuraciones de Hardware ESC
Los ESC vienen en varios factores de forma y configuraciones para adaptarse a diferentes construcciones y requisitos. A lo largo de los años, he usado prácticamente todos los tipos de configuraciones de ESC disponibles, y cada uno tiene su lugar dependiendo de lo que estés construyendo.
ESC Individuales vs 4 en 1
ESC Individuales
ESC separados para cada motor. Comencé con estos y todavía los uso para ciertas construcciones:
Ventajas:
- Más fáciles de reemplazar si uno falla. He salvado innumerables sesiones de vuelo al tener un ESC individual de repuesto en mi kit de campo.
- Mejor disipación de calor. He encontrado esto particularmente importante para construcciones de alto rendimiento que empujan los límites del manejo de corriente.
- Puede mezclar y combinar clasificaciones si es necesario. He construido quads asimétricos donde diferentes motores requerían diferentes clasificaciones de ESC.
- A menudo más opciones de montaje flexibles. He creado algunas construcciones inusuales donde el montaje estándar no era posible.
Desventajas:
- Mayor complejidad de cableado. He pasado muchas horas meticulosamente enrutando cables para mantener las construcciones limpias.
- Potencialmente mayor peso total. Cada gramo importa en las construcciones de carreras, y he medido diferencias de 10-15g en comparación con las soluciones 4 en 1.
- Ocupa más espacio en el marco. Esto limita otros componentes que puedes agregar.
- Por lo general, más caros en total. Normalmente he gastado un 20-30% más cuando uso ESC individuales.
Mejor Para:
- Construcciones más grandes con amplio espacio. Mis cruceros de largo alcance generalmente usan ESC individuales.
- Pilotos que priorizan la reparabilidad. Recomiendo estos a amigos que vuelan en áreas remotas.
- Construcciones personalizadas con diferentes requisitos de motor. He usado estos para configuraciones asimétricas experimentales.
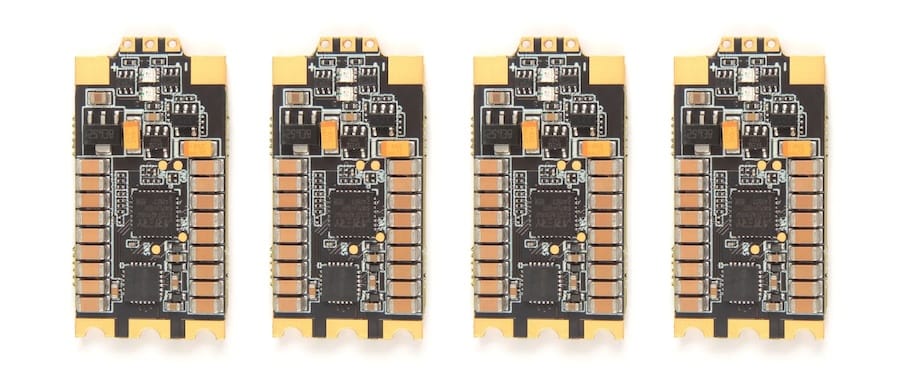
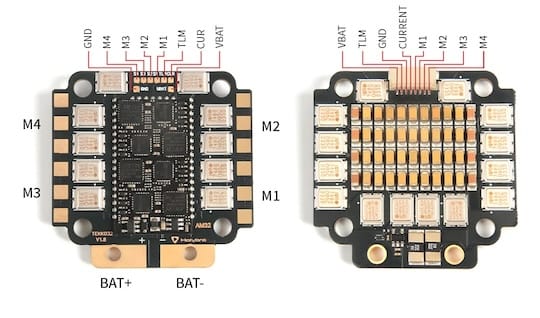
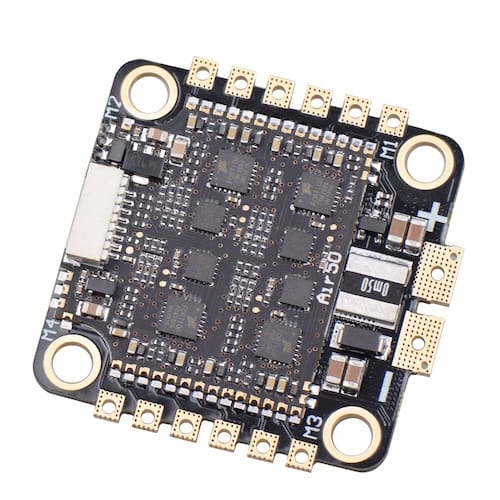
Placas ESC 4 en 1
Cuatro ESC integrados en una sola PCB. Estos se han convertido en mi opción preferida para la mayoría de las construcciones:
Ventajas:
- Cableado más limpio y simple. Mis construcciones se volvieron mucho más ordenadas cuando cambié a ESC 4 en 1.
- Por lo general, menor peso total. He ahorrado hasta 15g en construcciones de carreras usando ESC 4 en 1.
- Ocupa menos espacio. Esto permite construcciones más compactas o espacio para componentes adicionales.
- A menudo más asequible como paquete. Normalmente ahorro un 20-30% en comparación con ESC individuales equivalentes.
- Instalación más fácil. Puedo completar una construcción en aproximadamente la mitad del tiempo usando un ESC 4 en 1.
Desventajas:
- Si un ESC falla, es posible que se deba reemplazar toda la placa. He perdido placas enteras por un solo cortocircuito del motor, una lección costosa.
- Generación de calor concentrada. He aprendido a garantizar un flujo de aire adecuado en construcciones ajustadas para evitar problemas térmicos.
- Menos flexibilidad para configuraciones de motores mixtos. Esto ha limitado algunas de mis construcciones más experimentales.
Mejor Para:
- Construcciones limpias con cableado mínimo. Todos mis drones con cámara usan ESC 4 en 1 para la configuración más limpia posible.
- Configuraciones estándar de quadcopter. Mis quads de carreras y estilo libre ahora usan casi exclusivamente ESC 4 en 1.
- Construcciones basadas en pilas con controladores de vuelo a juego. La integración entre las pilas FC y ESC modernas es difícil de superar.
Factores de Forma ESC
ESC Estándar
ESC individuales tradicionales:
- Tamaño: Típicamente de 20 a 30 mm de largo. Recuerdo cuando los ESC tenían el tamaño de un pulgar; ahora a menudo son más pequeños que una uña.
- Montaje: Varias opciones, incluyendo termocontraíble, bridas o soportes dedicados. Los he probado todos y me he decidido por el montaje blando con recubrimiento conformal para el mejor aislamiento de vibraciones.
- Conexiones: Normalmente cables para señal y alimentación. He aprendido a mantenerlos lo más cortos posible para reducir la resistencia y el peso.

ESC de pila de 20×20mm
Diseñados para apilarse con controladores de vuelo:
- Tamaño: Patrón de montaje de 20×20mm. He cambiado la mayoría de mis construcciones de menos de 250g a este factor de forma.
- Montaje: Pila estándar con controlador de vuelo. Siempre uso montaje blando entre las capas de la pila después de aprender cuánto pueden afectar las vibraciones al rendimiento.
- Conexiones: Almohadillas de soldadura directa o cables planos. Prefiero la soldadura directa para mayor fiabilidad, aunque los cables planos facilitan el mantenimiento.

ESC de pila de 30.5×30.5mm
ESC más grandes compatibles con pilas:
- Tamaño: Patrón de montaje de 30.5×30.5mm. Los uso para mis construcciones de estilo libre y largo alcance donde necesito más manejo de potencia.
- Montaje: Pila estándar con controlador de vuelo. He descubierto que el patrón de montaje más grande proporciona mejor estabilidad en construcciones más grandes.
- Conexiones: Almohadillas de soldadura directa o cables planos. Las placas más grandes suelen ofrecer puntos de conexión más robustos, lo que agradezco cuando trabajo con cables de mayor calibre.
Soluciones AIO (todo en uno)
ESC integrados con controladores de vuelo:
- Tamaño: Varios, típicamente 20×20mm o 30.5×30.5mm. Los uso exclusivamente en mis microconstrucciones.
- Integración: FC y ESC combinados en una sola placa. Al principio era escéptico con este enfoque, pero la fiabilidad ha mejorado drásticamente en los últimos años.
- Conexiones: Conexiones internas simplificadas. La reducción del cableado externo ha eliminado muchos puntos potenciales de fallo en mis construcciones.

Especificaciones y valores nominales de corriente
Manejo de corriente
La corriente continua máxima que un ESC puede manejar de forma segura. He aprendido a ser conservador con estos valores después de ver ESC literalmente derretirse durante vuelos agresivos:
- Drones de carreras: 35-50A por motor. Mis construcciones de carreras suelen usar ESC de 45A aunque rara vez consumen más de 35A de forma continua; el margen proporciona tranquilidad durante carreras intensas.
- Drones de estilo libre: 30-45A por motor. Para estilo libre, he descubierto que tener margen de corriente es esencial para esos momentos en los que estás al límite con maniobras agresivas.
- Largo alcance/cinematográfico: 25-40A por motor. Mis construcciones de largo alcance suelen usar ESC de 35A, que proporcionan un buen equilibrio entre manejo de corriente y eficiencia.
- Microconstrucciones: 10-25A por motor. He descubierto que incluso las construcciones pequeñas pueden consumir cantidades sorprendentes de corriente durante vuelos agresivos, así que no bajo de 20A para nada excepto los whoops más pequeños.
Valores nominales de ráfaga
Corriente máxima de corta duración. He aprendido a no confiar demasiado en estos valores:
- Valores típicos de ráfaga: 1.5-2× el valor nominal continuo. En mis pruebas, he descubierto que muchos ESC en realidad no pueden mantener sus valores de ráfaga anunciados durante toda la duración declarada.
- Duración: Normalmente especificada para 5-10 segundos. Los he cronometrado durante pruebas de banco y he encontrado una variación significativa entre fabricantes.
- Importancia: Crítico para manejar aceleraciones bruscas y maniobras agresivas. He notado que los ESC con MOSFET de mayor calidad tienden a manejar mucho mejor las corrientes de ráfaga que las opciones económicas.
BEC (circuito eliminador de batería)
Regulación de voltaje para alimentar otros componentes. Esta característica se ha vuelto menos importante en las construcciones modernas:
- BEC lineal: Simple, menos eficiente, se encuentra en ESC antiguos. Los usaba en mis primeras construcciones y noté que se calentaban bastante cuando alimentaban múltiples periféricos.
- BEC conmutado: Más eficiente, común en ESC modernos. La reducción de la generación de calor hace una diferencia notable en construcciones compactas.
- Valores nominales: Típicamente 5V a 1-3A. He descubierto que 2A suele ser suficiente para la mayoría de las construcciones a menos que estés alimentando accesorios exigentes como tiras LED.
La mayoría de las construcciones modernas basadas en pilas no usan BEC de ESC. Ahora uso PDB dedicados o controladores de vuelo con regulación de voltaje integrada para una entrega de energía más limpia.
Protocolos y comunicación de ESC
El protocolo determina cómo el controlador de vuelo se comunica con el ESC, afectando el rendimiento y las características. He usado todos los protocolos, desde PWM estándar hasta el último DShot bidireccional, y la evolución ha sido notable.
PWM estándar
El protocolo analógico original:
- Tipo de señal: Modulación por ancho de pulso (50-400Hz). Comencé con esto en mis primeras construcciones, y las limitaciones fueron inmediatamente evidentes.
- Resolución: Rango de 1000-2000μs (aproximadamente 8 bits). Los pasos bruscos eran notables en vuelo, creando un efecto de "escalera" en la respuesta del acelerador.
- Latencia: 2-4ms. Esto se sentía como una eternidad cuando intentaba realizar maniobras precisas.
- Ventajas: Compatibilidad universal. Podía usar cualquier ESC con cualquier controlador de vuelo, la única ventaja real.
- Desventajas: Alta latencia, baja resolución, sin telemetría. Mis primeros quads basados en PWM se sentían lentos e imprecisos en comparación con las construcciones modernas.
- Uso actual: Obsoleto para drones FPV. No he usado PWM en años y no lo recomendaría para ninguna construcción moderna.
OneShot125
Protocolo digital temprano:
- Tipo de señal: Temporización digital (125-250Hz). Esta fue mi primera prueba de protocolos digitales, y la mejora fue notable.
- Resolución: Rango de 125-250μs (aproximadamente 10 bits). La respuesta más suave del acelerador marcó una diferencia en la sensación de vuelo.
- Latencia: 1-2ms. Aún alta para los estándares actuales, pero una mejora significativa sobre PWM.
- Ventajas: Mejor que PWM estándar. Mis quads se sentían más receptivos cuando hice este cambio.
- Desventajas: Latencia aún relativamente alta. Podía sentir el retraso durante maniobras rápidas.
- Uso actual: En gran parte reemplazado por DShot. No he usado OneShot en años.
Multishot
Protocolo más rápido para carreras:
- Tipo de señal: Temporización digital (hasta 32kHz). Cuando probé este protocolo por primera vez, la reducción de latencia fue inmediatamente evidente.
- Resolución: Rango de 5-25μs (aproximadamente 12 bits). La resolución más fina del acelerador facilitó el vuelo estacionario y los movimientos precisos.
- Latencia: 0.2-0.5ms. Esto fue un cambio de juego para las carreras: mis entradas se sentían casi instantáneamente traducidas a cambios en los motores.
- Ventajas: Latencia muy baja. Mis construcciones de carreras que usaban Multishot tenían una nitidez que no era posible con protocolos anteriores.
- Desventajas: Menos confiable que DShot. Experimenté fallas ocasionales que me llevaron a cambiar a DShot para la mayoría de las construcciones.
- Uso actual: Aplicaciones de nicho. Todavía tengo una construcción de carrera especializada que usa Multishot, pero es raro en quads modernos.
DShot
La familia de protocolos digitales estándar actual:
- Tipo de señal: Paquetes de datos digitales. La robustez de este enfoque eliminó muchos de los problemas de confiabilidad que experimenté con protocolos anteriores.
- Variantes:
- DShot150: Tasa de datos de 150kbps. He usado esto en micro construcciones donde la potencia de procesamiento es limitada.
- DShot300: Tasa de datos de 300kbps. Un buen equilibrio para la mayoría de las construcciones: uso esto cuando no estoy seguro de la integridad de la señal.
- DShot600: Tasa de datos de 600kbps (más común). Este es mi preferido para la mayoría de las construcciones, ofreciendo un excelente rendimiento sin forzar los límites.
- DShot1200: Tasa de datos de 1200kbps. Uso esto en construcciones de alto rendimiento con rutas de señal cortas y limpias.
- Resolución: 16 bits (rango de valores 0-2047). El control fino que esto permite es notable: puedo hacer pequeños ajustes de aceleración que no eran posibles con protocolos anteriores.
- Latencia: 0.2-0.5ms dependiendo de la variante. En pruebas consecutivas, pude sentir la diferencia entre DShot150 y DShot600 en construcciones receptivas.
- Ventajas: Precisión digital, verificación de errores, comandos, capacidad bidireccional. La mejora en la confiabilidad por sí sola hizo que valiera la pena cambiar a esto.
- Desventajas: Requiere hardware compatible. Tuve que actualizar algunos de mis ESC más antiguos para usar este protocolo.
- Uso actual: Estándar para construcciones modernas. Ahora uso DShot600 en prácticamente todas mis construcciones.
ProShot
Versión optimizada de DShot:
- Tipo de señal: DShot simplificado. Cuando probé este protocolo, las diferencias con DShot fueron sutiles.
- Tasa de datos: Similar a DShot600. En mis pruebas, el rendimiento fue comparable.
- Latencia: Ligeramente menor que DShot. Apenas pude percibir la diferencia en la mayoría de los escenarios de vuelo.
- Ventajas: Potencialmente menor carga de CPU. Noté este beneficio principalmente en controladores de vuelo F4 que ejecutan configuraciones complejas.
- Desventajas: Adopción limitada. Encontré menos recursos para solucionar problemas cuando surgieron problemas.
- Uso actual: Raro, en su mayoría reemplazado por DShot. Experimenté con ProShot pero finalmente volví a DShot para un mejor soporte de la comunidad.
DShot bidireccional
DShot mejorado con telemetría:
- Tipo de señal: Comunicación DShot bidireccional. Esto fue una revelación cuando lo implementé por primera vez: de repente, mi controlador de vuelo sabía exactamente lo que estaban haciendo los motores.
- Características: Permite retroalimentación de RPM para filtrado. La mejora en el rendimiento de vuelo fue dramática en mi primera construcción con esta característica.
- Requisitos: Firmware ESC compatible y controlador de vuelo. Tuve que actualizar varios componentes para aprovechar esta capacidad.
- Ventajas: Permite filtrado RPM, rendimiento mejorado. La reducción de ruido y vibración fue inmediatamente notable en mis registros de caja negra.
- Desventajas: Configuración un poco más compleja. Pasé algunas horas haciendo que mi primera configuración bidireccional funcionara correctamente.
- Uso actual: Cada vez más estándar para construcciones de rendimiento. Ahora habilito esto en todas las construcciones compatibles: los beneficios son demasiado significativos para ignorarlos.
Comparación de protocolos
Basado en mis extensas pruebas en múltiples construcciones, así es como se comparan estos protocolos:
| Protocolo | Resolución | Latencia | Verificación de errores | Telemetría | Comandos | Uso actual |
|---|---|---|---|---|---|---|
| PWM | 8 bits | 2-4ms | No | No | No | Obsoleto |
| OneShot125 | 10 bits | 1-2ms | No | No | No | Legado |
| Multishot | 12 bits | 0.2-0.5ms | No | No | No | Nicho |
| DShot150 | 16 bits | ~0.5ms | Sí | Opcional | Sí | Nivel de entrada |
| DShot300 | 16 bits | ~0.3ms | Sí | Opcional | Sí | Común |
| DShot600 | 16 bits | ~0.2ms | Sí | Opcional | Sí | Estándar |
| DShot1200 | 16 bits | ~0.1ms | Sí | Opcional | Sí | Gama alta |
| ProShot | 16 bits | ~0.2ms | Sí | Opcional | Sí | Raro |
Opciones de firmware ESC
El firmware es el software que se ejecuta en el microprocesador del ESC, determinando sus capacidades y comportamiento. He experimentado con todas las principales opciones de firmware, y cada una tiene sus fortalezas y debilidades.
BLHeli_S
Firmware popular de 8 bits que he usado extensivamente:
- Compatibilidad de hardware: ESC de 8 bits. Comencé con estos en mis primeras construcciones y todavía los uso para ciertas aplicaciones.
- Características: Control básico del motor, configuración limitada. Aunque no tienen tantas funciones como las opciones de 32 bits, he descubierto que manejan muy bien lo esencial.
- Rendimiento: Bueno para construcciones de nivel inicial a intermedio. He construido docenas de quads con ESC BLHeli_S que vuelan maravillosamente para estilo libre y carreras informales.
- Configuración: Software BLHeli Configurator. Aprecio la interfaz sencilla, aunque carece de algunas opciones avanzadas.
- Ventajas: Ampliamente compatible, confiable. He descubierto que estos son increíblemente confiables; algunas de mis construcciones más antiguas todavía funcionan con BLHeli_S sin problemas.
- Desventajas: Características limitadas en comparación con las opciones de 32 bits. He alcanzado el límite de lo que es posible con estos cuando se llevan al límite de rendimiento.
BLHeli_32
Firmware avanzado de 32 bits que revolucionó mis construcciones:
- Compatibilidad de hardware: ESC de 32 bits. Actualicé todos mis quads principales a hardware BLHeli_32 cuando estuvo disponible.
- Características: Amplia configuración, telemetría, control LED. La primera vez que accedí a los datos de telemetría, transformó la forma en que monitoreaba mis construcciones durante el vuelo.
- Rendimiento: Excelente para todas las aplicaciones. He usado ESC BLHeli_32 para todo, desde pequeños whoops hasta cruceros de largo alcance, con resultados consistentemente impresionantes.
- Configuración: Software BLHeli_32 Configurator. La interfaz es más completa que BLHeli_S, dándome acceso a ajustes que ni siquiera sabía que necesitaba hasta que los tuve.
- Ventajas: Rico en características, alto rendimiento. La diferencia fue inmediatamente notable cuando actualicé: control de motor más suave, mejor frenado y respuesta de aceleración más precisa.
- Desventajas: Propietario, requiere licencia paga para fabricantes. Esto ha limitado algo de innovación y mantenido los precios más altos de lo que podrían ser.
AM32
Alternativa de código abierto a BLHeli_32 que he estado adoptando cada vez más:
- Compatibilidad de hardware: ESC de 32 bits. He flasheado esto con éxito en varias marcas diferentes de ESC de 32 bits.
- Características: Similar a BLHeli_32, impulsado por la comunidad. Me ha impresionado la rapidez con la que se implementan nuevas funciones basadas en los comentarios de los usuarios.
- Rendimiento: Comparable a BLHeli_32. En mis pruebas consecutivas, no pude notar la diferencia en la sensación de vuelo entre construcciones idénticas con BLHeli_32 vs. AM32.
- Configuración: AM32 Configurator o JESC Configurator. La interfaz no es tan pulida, pero hace el trabajo de manera efectiva.
- Ventajas: Código abierto, gratuito, desarrollo activo. Aprecio el aspecto comunitario y el rápido ritmo de mejora.
- Desventajas: Menos soporte generalizado. He tenido que investigar más al solucionar problemas en comparación con las opciones más establecidas.
JESC
Firmware mejorado basado en BLHeli_S que le dio nueva vida a mi hardware más antiguo:
- Compatibilidad de hardware: ESCs BLHeli_S. He utilizado esto para actualizar varias construcciones antiguas sin reemplazar los ESCs.
- Características: PWM de 48kHz, rendimiento mejorado. La frecuencia PWM más alta hizo una diferencia notable en la suavidad del motor en mis construcciones de estilo libre.
- Rendimiento: Mejor que el BLHeli_S de serie. Era escéptico sobre las afirmaciones hasta que lo probé; la mejora en la capacidad de respuesta y la suavidad definitivamente valió la pena la actualización.
- Configuración: Configurador JESC. La interfaz es similar al Configurador BLHeli_S, lo que facilita la transición.
- Ventajas: Mejora el rendimiento del hardware existente. He ahorrado cientos actualizando el firmware en lugar de reemplazar los ESCs.
- Desventajas: Se requiere licencia de pago. Aunque no es caro, al principio me mostré reacio a pagar por el firmware cuando existen opciones gratuitas. Después de probarlo, considero que es dinero bien gastado.
Bluejay
Firmware de código abierto para hardware BLHeli_S con el que recientemente he estado experimentando:
- Compatibilidad de hardware: ESCs BLHeli_S. He flasheado con éxito esto en varios de mis ESCs más antiguos.
- Características: Rendimiento mejorado, desarrollo abierto. Aprecio particularmente el control de potencia de arranque mejorado, que ha eliminado el tartamudeo ocasional que experimenté con el firmware de serie.
- Rendimiento: Mejor que el BLHeli_S de serie. En mis pruebas, está casi a la par con JESC pero sin la tarifa de licencia.
- Configuración: Configurador Bluejay. La interfaz es sencilla e incluye algunas características únicas que no se encuentran en otros configuradores.
- Ventajas: Gratis, código abierto. Me encanta apoyar proyectos impulsados por la comunidad, especialmente cuando funcionan tan bien.
- Desventajas: Compatibilidad de hardware limitada. He tenido algunos ESCs que no eran compatibles, lo cual fue frustrante cuando intentaba estandarizar entre construcciones.

Comparación de características de firmware
Basado en mis extensas pruebas en múltiples construcciones, así es como se comparan estas opciones de firmware:
| Característica | BLHeli_S | BLHeli_32 | AM32 | JESC | Bluejay |
|---|---|---|---|---|---|
| Hardware | 8 bits | 32 bits | 32 bits | 8 bits | 8 bits |
| Frecuencia PWM | 24kHz | 16-48kHz | 24-48kHz | 48kHz | 24-48kHz |
| DShot bidireccional | Limitado | Sí | Sí | Sí | Sí |
| Telemetría | No | Sí | Sí | Limitado | Limitado |
| Potencia de arranque | Ajustable | Ajustable | Ajustable | Ajustable | Ajustable |
| Frenado | Limitado | Avanzado | Avanzado | Mejorado | Mejorado |
| Configurabilidad | Moderada | Extensa | Extensa | Moderada | Moderada |
| Costo | Gratis | Gratis (usuarios) | Gratis | De pago | Gratis |
| Desarrollo | Cerrado | Cerrado | Abierto | Cerrado | Abierto |
He descubierto que la elección correcta de firmware depende en gran medida de sus necesidades específicas y hardware. Para mis construcciones de alto rendimiento, uso exclusivamente BLHeli_32 o AM32. Para construcciones económicas o cuando reutilizo hardware más antiguo, Bluejay se ha convertido en mi opción preferida.
Seleccionando el ESC correcto
Elegir el ESC apropiado depende de sus necesidades específicas y requisitos de construcción. Después de construir cientos de drones para varios propósitos, he desarrollado fuertes preferencias para diferentes aplicaciones.
Para drones de carreras
Prioridad: Rendimiento, confiabilidad y capacidad de respuesta; cada milisegundo cuenta en las carreras.
Características recomendadas:
- Clasificación de corriente: 35-50A por motor. He descubierto que 45A proporciona el equilibrio perfecto de rendimiento y confiabilidad para la mayoría de las construcciones de carreras.
- Protocolo: DShot600 o superior. No consideraría nada menos para carreras; la diferencia de capacidad de respuesta es notable.
- Firmware: BLHeli_32 o AM32. He ganado carreras con ambos y el rendimiento es comparable.
- Configuración: 4 en 1 para construcciones limpias. Mis quads de carreras están todos construidos con ESCs 4 en 1 para el ahorro de peso y el cableado simplificado.
- Características: DShot bidireccional para filtrado RPM. Esto ha sido un cambio de juego para mis construcciones de carreras; el filtrado mejorado significa que puedo ejecutar valores PID más altos sin oscilaciones.
Ejemplos:
- Hobbywing XRotor 60A 4 en 1. Este ha sido mi preferido para construcciones de carreras serias; confiabilidad sólida como una roca y excelente rendimiento.
- T-Motor F55A Pro II. Me ha impresionado el rendimiento térmico de estos ESCs durante sesiones de carreras prolongadas.
- Aikon TEKKO32 F4 50A. Estos ofrecen un excelente valor y han impulsado varias de mis construcciones que han llegado al podio.
Para drones de estilo libre
Prioridad: Confiabilidad, rendimiento suave y durabilidad; el estilo libre pone tensiones únicas en los componentes.
Características recomendadas:
- Clasificación de corriente: 30-45A por motor. He descubierto que 40A es el punto óptimo para la mayoría de las construcciones estilo libre, ofreciendo margen sin exceso de peso.
- Protocolo: DShot300 o DShot600. Ahora uso DShot600 para todas mis construcciones estilo libre: la resolución mejorada es notable en maniobras precisas.
- Firmware: BLHeli_32 o AM32. Las funciones avanzadas de frenado en estos firmwares marcan una diferencia significativa en el manejo estilo libre.
- Configuración: 4 en 1 o individual según preferencia. He cambiado la mayoría de mis construcciones estilo libre a ESC 4 en 1, pero aún uso ESC individuales en construcciones donde priorizo la reparabilidad.
- Características: Telemetría para gestión de batería. Esto me ha salvado de dañar innumerables baterías durante largas sesiones estilo libre.
Ejemplos:
- HGLRC Forward 45A 4 en 1. Los he estado usando en mi construcción principal estilo libre por más de un año con excelentes resultados.
- Spedix GS45A. Estos han sobrevivido algunos accidentes espectaculares en mis construcciones: la durabilidad es impresionante.
- Diatone Mamba F40 40A. Una excelente opción de valor que he usado en varias construcciones estilo libre de gama media con gran éxito.
Para Drones de Largo Alcance/Cinematográficos
Prioridad: Eficiencia, confiabilidad y funcionamiento suave; estas construcciones deben ser confiables al volar lejos de casa.
Características Recomendadas:
- Clasificación de Corriente: 25-40A por motor. He descubierto que 35A proporciona un amplio margen para la mayoría de las configuraciones de largo alcance sin agregar peso innecesario.
- Protocolo: DShot300 o DShot600. Prefiero DShot300 para construcciones de largo alcance: es más que suficientemente receptivo y potencialmente más confiable en trayectorias de señal más largas.
- Firmware: BLHeli_32 o AM32. Las capacidades de telemetría son esenciales para monitorear la salud del sistema durante vuelos prolongados.
- Configuración: ESC individuales para redundancia.
- Características: Telemetría, monitoreo de temperatura. Dependo en gran medida de estas funciones para asegurarme de no exigir demasiado a los componentes durante vuelos prolongados.
Ejemplos:
- T-Motor F35A. Estos han sido excepcionalmente confiables en mis construcciones de largo alcance: he registrado cientos de kilómetros con ellos.
- Aikon TEKKO32 35A. La eficiencia de estos ESC es impresionante, ayudando a extender los tiempos de vuelo en mis cruceros de largo alcance.
- Holybro Tekko32 35A. Aprecio los completos datos de telemetría que proporcionan, dándome confianza durante vuelos distantes.
Para Construcciones Micro
Prioridad: Tamaño, peso e integración; cada gramo y milímetro importa en estas diminutas construcciones.
Características Recomendadas:
- Clasificación de Corriente: 10-25A por motor. He descubierto que 20A proporciona un buen equilibrio para la mayoría de las construcciones micro, incluso al exigir rendimiento.
- Protocolo: DShot300 o DShot600. Uso DShot600 cuando es posible, pero DShot300 es perfectamente adecuado para la mayoría de las aplicaciones micro.
- Firmware: BLHeli_S o BLHeli_32. Normalmente uso BLHeli_S para las construcciones más pequeñas debido a consideraciones de costo y peso, pero BLHeli_32 para construcciones de 3" donde el rendimiento es más crítico.
- Configuración: AIO o 4 en 1. Mis construcciones más pequeñas usan placas AIO que combinan FC y ESC, mientras que mis construcciones de 3" generalmente usan pilas separadas de FC y ESC 4 en 1.
- Tamaño: 20×20mm o más pequeño. Me ha sorprendido lo capaces que se han vuelto los ESC de 16×16mm para las construcciones más diminutas.
Ejemplos:
- HGLRC Zeus 20A 4 en 1. Estos han impulsado varias de mis construcciones de 3" con un excelente rendimiento para su tamaño.
- Happymodel 12A 4 en 1. Mi opción preferida para construcciones tipo palillo de dientes: ligeros pero sorprendentemente capaces.
- BetaFPV F4 2-4S AIO. He construido varios micro whoops con estas placas y me ha impresionado su relación rendimiento-peso.
Para Principiantes
Prioridad: Confiabilidad, valor y facilidad de uso; la primera experiencia de construcción debe ser lo más fluida posible.
Características Recomendadas:
- Clasificación de Corriente: 30-40A por motor (proporciona margen). Siempre recomiendo a los principiantes que opten por más margen del que creen que necesitan: evita fallas frustrantes durante el proceso de aprendizaje.
- Protocolo: DShot300 o DShot600. Sugiero DShot300 para principiantes: es bastante rápido y potencialmente más indulgente con problemas de integridad de señal.
- Firmware: BLHeli_S o BLHeli_32. Normalmente recomiendo BLHeli_S para las primeras construcciones debido a una configuración más simple, luego BLHeli_32 a medida que las habilidades avanzan.
- Configuración: 4 en 1 para un cableado más simple. La complejidad reducida del cableado marca una gran diferencia para los constructores primerizos: he ayudado a docenas de principiantes con sus primeras construcciones, y los ESC 4 en 1 reducen significativamente la frustración.
- Características: Básicas, sin complejidad abrumadora. Aconsejo a los principiantes comenzar con características estándar y agregar complejidad a medida que ganan experiencia.
Ejemplos:
- iFlight SucceX-E 45A 4 en 1. Los he recomendado a muchos principiantes y los comentarios han sido consistentemente positivos: confiables y sencillos.
- HAKRC 35A 4 en 1. Ofrecen un excelente valor y han demostrado ser confiables en las construcciones para principiantes con las que he ayudado.
- Racerstar REV35 35A. Cuando el presupuesto es la principal preocupación, estos brindan un rendimiento aceptable a un precio muy accesible.
Instalación y Configuración de ESC
La instalación y configuración adecuadas son cruciales para un rendimiento y confiabilidad óptimos. He aprendido muchas lecciones por las malas a través de cientos de construcciones.
Instalación de Hardware
Consideraciones de Montaje
- Ubicación: Posicionar para una refrigeración adecuada. He descubierto que montar los ESC en la trayectoria del flujo de aire hace una diferencia significativa en el rendimiento térmico; una vez medí una diferencia de 15°C simplemente reposicionando los ESC en el flujo de la hélice.
- Vibración: Montaje seguro para evitar daños por vibración. Después de perder un ESC por fatiga de soldadura inducida por vibración, ahora uso montaje blando para todos los ESC.
- Protección: Proteger de daños por impacto cuando sea posible. Posiciono los ESC dentro del marco siempre que sea posible después de que varios hayan sido dañados por impactos directos.
- Accesibilidad: Considerar el acceso para mantenimiento. He construido quads que requirieron un desmontaje casi completo para acceder a los ESC, ¡nunca más!
- Gestión de Calor: Permitir flujo de aire para refrigeración. Dejo un espacio adecuado entre los componentes y me aseguro de que nada bloquee el flujo de aire a los ESC.
Mejores Prácticas de Cableado
- Cableado de Potencia: Usar el calibre de cable apropiado para la corriente. Esta es un área donde nunca hago concesiones después de experimentar las consecuencias de un cableado subdimensionado.
- 20-22AWG para construcciones micro. Uso 20AWG para cualquier cosa que pueda tirar más de 10A.
- 18AWG para construcciones estándar. Este es mi estándar para quads de 5" funcionando con 4S o 6S.
- 16AWG para aplicaciones de alta corriente. Uso esto para cables de batería y a veces cables de motor en construcciones de alto rendimiento de 6S.
- Cableado de Señal: Mantener alejado de los cables de potencia para reducir interferencias. Enruto los cables de señal en el lado opuesto de la pila de los cables de potencia siempre que sea posible.
- Cableado de Motor: Cables de igual longitud para un rendimiento equilibrado. Mido y corto los cables del motor a longitudes idénticas; es un pequeño detalle que contribuye a características de vuelo más suaves.
- Condensadores: Instalar condensadores de tamaño adecuado cerca de la entrada de potencia. Agrego un condensador de baja ESR a cada construcción después de aprender cuánto puede afectar el ruido eléctrico al rendimiento de vuelo.
- Aislamiento: Aislar adecuadamente todas las conexiones. Uso abundante tubo termorretráctil y recubrimiento conformal en toda la electrónica expuesta después de que un cortocircuito terminara con una costosa construcción.
Para información más detallada sobre cableado, consulte:
Guía de Cableado de Drones
Configuración de Software
Configuración de BLHeli_S
Después de configurar cientos de ESC, he desarrollado un enfoque sistemático:
- Conectar ESC: A través de passthrough del controlador de vuelo o programador dedicado. Prefiero passthrough por conveniencia, pero mantengo un programador dedicado en mi kit de campo para solución de problemas.
- Ajustes Básicos:
- Dirección del Motor: Normal o invertida. Siempre verifico la dirección del motor con un giro de prueba rápido antes de instalar las hélices, una lección aprendida de un vergonzoso incidente de despegue.
- Frecuencia PWM: 24kHz estándar, 48kHz para un funcionamiento más suave. Uso 48kHz en todas mis construcciones freestyle para una sensación de motor más suave, a pesar de la ligera penalización de eficiencia.
- Potencia de Arranque: Ajustar según el tamaño del motor y las hélices. He descubierto que las construcciones más pesadas necesitan mayor potencia de arranque; normalmente uso 0.75-1.00 para quads de 5" y 0.5-0.75 para micros.
- Sincronización: Media-Alta para la mayoría de las aplicaciones. Uso Media (22.5°) para eficiencia o Alta (30°) para máximo rendimiento, dependiendo del propósito de la construcción.
- Compensación de Desmagnetización: Media-Alta para la mayoría de las configuraciones. Después de experimentar la frustración de la desincronización en pleno vuelo, nunca voy por debajo de Media en ninguna construcción.
- Ajustes Avanzados:
- Freno al Parar: Habilitar para frenado activo. Habilito esto en construcciones freestyle para paradas más nítidas, pero lo deshabilito en construcciones de largo alcance para eficiencia.
- Protección de Bajo Voltaje: Configurar según el tipo de batería. Establezco esto de manera conservadora después de arruinar varios paquetes LiPo costosos.
- Protección de Corriente: Establecer límites apropiados. Normalmente establezco esto alrededor de un 20% por encima de lo que espero extraer durante el funcionamiento normal.
Configuración de BLHeli_32
Las opciones adicionales en BLHeli_32 requieren una consideración más cuidadosa:
- Conectar ESC: A través de passthrough del controlador de vuelo o enlace USB. La conexión USB directa en muchos ESC BLHeli_32 es una característica que he llegado a apreciar mucho.
- Ajustes Básicos:
- Dirección del Motor: Normal o invertida. Al igual que con BLHeli_S, siempre pruebo antes de instalar las hélices.
- Frecuencia PWM: 24-48kHz según preferencia. Uso 48kHz para freestyle y 24kHz para construcciones de largo alcance donde la eficiencia es más importante que la suavidad.
- Potencia de Rampa: Ajustar para arranques suaves. He descubierto que el 25% funciona bien para la mayoría de las construcciones, pero los equipos cinematográficos pesados pueden necesitar 35-40%.
- Sincronización: 22-25° para la mayoría de las aplicaciones. Rara vez salgo de este rango después de que pruebas extensas mostraran rendimientos decrecientes.
- Ajustes Avanzados:
- Tipo de Freno: Apagado, Parada o Freno. Uso Freno para construcciones freestyle y Parada para la mayoría de las demás.
- Compensación de Desmagnetización: Ajustar para prevención de desincronización. He descubierto que Alto funciona mejor para motores de alto KV, mientras que Medio es suficiente para configuraciones de KV más bajas.
- DShot Bidireccional: Habilitar para filtrado RPM. Habilito esto en todas las construcciones que lo admiten; la mejora en el rendimiento de vuelo es sustancial.
- Protección de Temperatura: Configurar límites. Establezco advertencia a 85°C y crítica a 100°C después de medir el rendimiento térmico en varias condiciones.
- Protección de Bajo Voltaje: Establecer corte apropiado. Configuro esto según el tipo de batería: 3.3V por celda para LiPo estándar, 3.0V para Li-ion.
- Características Adicionales:
- Control LED: Configurar LED RGB si están presentes. Uso diferentes colores para diferentes quads para identificarlos fácilmente en el aire.
- Telemetría: Habilitar y configurar. Siempre habilito esto por los valiosos datos en vuelo.
- Calibración del Acelerador: Generalmente no es necesario con protocolos digitales. Omito este paso con DShot pero lo realizo cuando uso protocolos analógicos.
Configuración de AM32
Similar a BLHeli_32 con algunas diferencias que he notado:
- Conectar ESC: A través del configurador. La interfaz es diferente pero logra los mismos objetivos.
- Ajustes básicos:
- Dirección del motor: Normal o invertida. Mismo procedimiento de prueba que con otro firmware.
- Frecuencia PWM: 24-48kHz. En mis pruebas, he encontrado que AM32 funciona ligeramente más fresco a 48kHz que BLHeli_32.
- Potencia de arranque: Ajustar según el tamaño del motor. En mi experiencia, AM32 parece necesitar valores de potencia de arranque ligeramente más altos; normalmente aumento entre un 5-10% en comparación con BLHeli_32.
- Ajustes avanzados:
- Sincronización de conmutación: Similar al timing del motor. Uso los mismos principios que con BLHeli_32.
- DShot bidireccional: Habilitar para filtrado RPM. Funciona igual de bien que en BLHeli_32 según mis pruebas.
- Tipo de freno: Configurar según sea necesario. Uso los mismos ajustes que con BLHeli_32 para montajes similares.
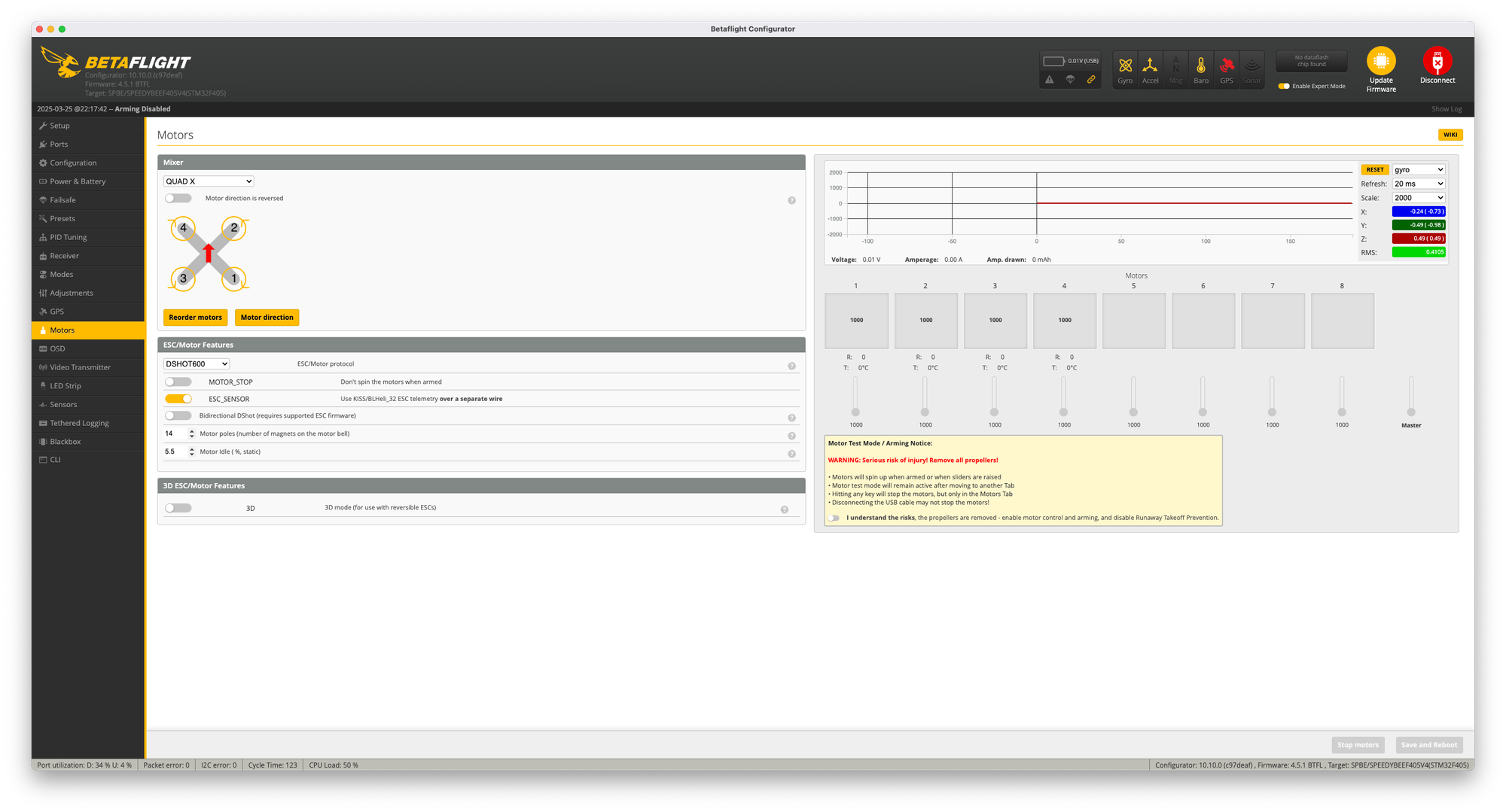
Configuración de protocolo en Betaflight
Después de configurar innumerables montajes en Betaflight, he desarrollado un enfoque sistemático:
- Seleccionar protocolo: En la pestaña Configuración
- Elegir DShot600 para la mayoría de aplicaciones. Se ha convertido en mi protocolo estándar para prácticamente todos los montajes.
- Habilitar DShot bidireccional si es compatible. Habilito esto siempre que sea posible; los beneficios para el filtrado son sustanciales.
Configuración de salida del motor:
Configuración de protocolo en Betaflight
Después de configurar innumerables montajes en Betaflight, he desarrollado un enfoque sistemático:
- Seleccionar protocolo: En la pestaña Configuración
- Elegir DShot600 para la mayoría de aplicaciones. Se ha convertido en mi protocolo estándar para prácticamente todos los montajes.
- Habilitar DShot bidireccional si es compatible. Habilito esto siempre que sea posible; los beneficios para el filtrado son sustanciales.
- Configuración de salida del motor:
- Verificar el orden y la dirección de los motores. Siempre hago esto con las hélices apagadas antes del primer vuelo; me ha salvado de innumerables choques.
- Configurar recursos si se usan pines no estándar. He tenido que hacer esto en montajes con pads dañados o al agregar características adicionales.
- Filtrado RPM (si se usa DShot bidireccional):
- Habilitar el filtrado RPM en la pestaña Configuración. Esto fue un cambio de juego para mis montajes; la mejora en el rendimiento de vuelo es notable.
- Verificar que la telemetría RPM esté funcionando en la pestaña Motores. Siempre compruebo esto girando los motores manualmente y observando que los valores RPM se actualicen.
Problemas comunes de configuración y soluciones
A lo largo de los años, me he encontrado y he resuelto innumerables problemas de configuración. Estos son algunos de los problemas más comunes y sus soluciones:
Motor girando en la dirección incorrecta
Posibles causas:
- Configuración incorrecta en el software ESC. He cometido este error más veces de las que me gustaría admitir.
- Cableado incorrecto del motor. Esto es fácil de solucionar pero requiere volver a soldar.
Soluciones:
- Cambiar la dirección en el configurador BLHeli. Esta es mi solución preferida; no requiere soldadura.
- Intercambiar dos cables del motor. Uso este enfoque cuando no tengo acceso al configurador o cuando trato con ESC que no son BLHeli.
ESC no detectado
Posibles causas:
- Problemas de comunicación. Los he rastreado desde malas soldaduras hasta asignaciones UART incorrectas.
- Firmware incorrecto. Ocasionalmente he flasheado versiones de firmware incompatibles que resultaron en fallas de comunicación.
- Problemas de alimentación. He tenido ESC que no se inicializaban correctamente debido a un voltaje insuficiente.
Soluciones:
- Verificar las conexiones de cableado. Siempre compruebo la continuidad con un multímetro si sospecho problemas de cableado.
- Comprobar la versión de firmware compatible. Mantengo notas sobre qué versiones de firmware funcionan con qué hardware.
- Asegurar una alimentación adecuada al ESC. He descubierto que algunos ESC necesitan un voltaje mínimo para inicializarse correctamente, particularmente importante al probar en banco con fuentes de alimentación.
Temas avanzados de ESC
Para los pilotos experimentados que buscan optimizar sus configuraciones, estos conceptos avanzados proporcionan información más profunda. He pasado años explorando estas áreas para sacar el máximo provecho de mis montajes.
Ajuste y optimización de ESC
Ajuste de frecuencia PWM
La frecuencia a la que el ESC conmuta la alimentación al motor. Este es uno de los primeros ajustes que hago al optimizar un nuevo montaje:
- Frecuencia más alta (32-48kHz):
- Funcionamiento más suave. Puedo sentir la diferencia en vuelo, particularmente notable en vuelo estacionario de precisión.
- Motores más silenciosos. He medido una reducción de 3-5dB en el ruido del motor al aumentar de 24kHz a 48kHz.
- Potencialmente más eficiente. He visto resultados mixtos aquí; algunas configuraciones muestran ligeras mejoras de eficiencia, otras no.
- Mayor generación de calor del ESC. He medido aumentos de temperatura de 5-10°C al funcionar a frecuencias más altas.
- Frecuencia más baja (16-24kHz):
- Más torque. Uso frecuencias más bajas en mis montajes de carga pesada donde el empuje máximo es más importante que la suavidad.
- Menos calentamiento del ESC. He encontrado esto particularmente importante en montajes compactos donde la refrigeración es limitada.
- Potencialmente mayor vida útil del ESC. Después de quemar varios ESC funcionando a altas frecuencias, ahora uso frecuencias más bajas en montajes que quiero que duren.
- Más ruido del motor. La diferencia es notable; mis montajes de 24kHz tienen un sonido claramente diferente a mis montajes de 48kHz.
Ajustes de sincronización del motor
Afecta la relación entre los campos magnéticos. He experimentado extensamente con los ajustes de sincronización y he descubierto que pueden impactar significativamente el rendimiento:
- Sincronización baja (0-10°):
- Más eficiente. He medido hasta un 15% más de tiempo de vuelo con ajustes de sincronización baja en construcciones de largo alcance.
- Menos potencia. He notado una reducción del empuje máximo, típicamente un 5-10% menor que con una sincronización más alta.
- Mejor para motores de alto KV. Uso una sincronización baja en todos mis motores de carrera de alto KV para mantener las temperaturas manejables.
- Operación más fría. He registrado reducciones de temperatura de 10-15°C en comparación con ajustes de sincronización alta.
- Sincronización media (15-25°):
- Rendimiento equilibrado. Este es mi rango preferido para la mayoría de las construcciones, un buen compromiso entre potencia y eficiencia.
- Estándar para la mayoría de las configuraciones. Raramente necesito desviarme de este rango para construcciones típicas de estilo libre y carreras.
- Buen equilibrio de eficiencia/potencia. He encontrado que este rango proporciona el 90% de la potencia de una sincronización alta con una eficiencia mucho mejor.
- Sincronización alta (25-30°):
- Potencia máxima. Uso este ajuste para mis construcciones de carreras de competición donde cada gramo de empuje es importante.
- Menos eficiente. He medido una reducción del 10-20% en los tiempos de vuelo en comparación con los ajustes de sincronización baja.
- Mejor para motores de bajo KV. He encontrado que los motores de bajo KV (menos de 2000KV) a menudo se benefician de una sincronización más alta.
- Operación más caliente. He registrado aumentos de temperatura de 15-20°C con sincronización alta; una refrigeración adecuada es esencial.
Compensación de desmagnetización
Ayuda a prevenir la desincronización del motor. Después de experimentar la frustración de las desincronizaciones en pleno vuelo, me he familiarizado mucho con este ajuste:
- Baja: Intervención mínima, buena para motores de alta calidad. Solo uso este ajuste en motores premium en condiciones ideales.
- Media: Ajuste estándar para la mayoría de las configuraciones. Este es mi valor predeterminado para la mayoría de las construcciones, un buen equilibrio entre rendimiento y fiabilidad.
- Alta: Máxima protección, buena para configuraciones problemáticas. Después de un incidente particularmente aterrador de desincronización sobre el agua, ahora uso este ajuste en todas mis construcciones de largo alcance.
- Efectos: Los ajustes más altos reducen la potencia máxima pero aumentan la fiabilidad. He medido una reducción de aproximadamente un 5% en el empuje máximo al pasar de Baja a Alta, pero la mejora en la fiabilidad vale la pena para la mayoría de las aplicaciones.
Potencia de arranque y rampa de aceleración
Controla la agresividad con la que arrancan los motores. He encontrado que este ajuste es particularmente importante para lanzamientos fiables:
- Valores más altos: Arranque más rápido, bueno para construcciones pesadas. Uso valores de 0.75-1.00 para mis plataformas cinematográficas con cámaras pesadas.
- Valores más bajos: Arranque más suave, mejor para construcciones ligeras. Mis micro quads normalmente usan 0.25-0.50 para arranques suaves y controlados.
- Consideraciones: Demasiado alto puede dañar los motores, demasiado bajo puede causar fallos de arranque. Aprendí esta lección por las malas después de quemar un motor con una potencia de arranque excesiva y, por el contrario, tener un quad que no pudo despegar con muy poca.
Telemetría y monitorización de ESC
Los ESC modernos pueden proporcionar datos valiosos. Esta capacidad ha transformado la forma en que monitorizo y mantengo mis construcciones:
Monitorización de corriente
- Corriente en tiempo real: Consumo de energía instantáneo. Uso esto para medir qué tan fuerte estoy exigiendo al sistema durante el vuelo.
- Corriente pico: Corriente máxima observada. Compruebo esto después de los vuelos para asegurarme de no exceder las capacidades de los ESC.
- Corriente promedio: Útil para cálculos de batería. Uso esto para estimar el tiempo de vuelo restante con mayor precisión que solo con el voltaje.
- Implementación: Requiere sensor de corriente y soporte de telemetría. He encontrado que los sensores de corriente dedicados suelen ser más precisos que los integrados en los ESC.
Monitorización de temperatura
- Temperatura del ESC: Crítica para prevenir daños térmicos. He salvado varios ESC de la destrucción monitorizando la temperatura y aterrizando cuando se calientan demasiado.
- Umbrales de advertencia: Típicamente 80-90°C. Configuro mi OSD para mostrar advertencias a 85°C después de encontrar que este es un buen equilibrio entre precaución y practicidad.
- Umbrales críticos: Típicamente 100-110°C. He medido que las tasas de fallo de MOSFET aumentan drásticamente por encima de 105°C, así que establezco cortes críticos a 100°C.
- Protección: Limitación automática del acelerador o apagado. Prefiero la limitación del acelerador al apagado completo; me ha salvado de choques cuando los ESC se han sobrecalentado en pleno vuelo.
Retroalimentación de RPM
- RPM del motor: Velocidad de rotación real. Me ha sorprendido ver lo altas que pueden llegar las RPM, más de 30,000 RPM en algunas de mis construcciones de carrera.
- Usos: Filtrado de RPM, análisis de rendimiento. La capacidad de filtrado ha sido revolucionaria para mis construcciones; las oscilaciones de propwash que antes eran imposibles de eliminar ahora han desaparecido por completo.
- Requisitos: DShot bidireccional o cable de telemetría dedicado. Ahora uso exclusivamente DShot bidireccional; es más simple de implementar y funciona igual de bien.
- Beneficios: Mejor filtrado del controlador de vuelo, vuelo más suave. La diferencia es dramática: puedo usar valores de PID mucho más altos sin oscilaciones, lo que resulta en quads mucho más receptivos.
Actualización y flasheo de firmware de ESC
Mantener los ESC actualizados o cambiar el firmware. He flasheado cientos de ESC y aprendido algunas lecciones importantes en el camino:
Conversión de BLHeli_S a BLHeli_32
No es físicamente posible debido a diferencias de hardware, una lección que aprendí después de intentar sin éxito flashear BLHeli_32 a hardware más antiguo:
- BLHeli_S usa procesadores de 8 bits. He abierto ESC dañados para examinar estos chips; son físicamente diferentes.
- BLHeli_32 requiere procesadores de 32 bits. Estos procesadores más potentes permiten las funciones avanzadas pero no son compatibles hacia atrás.
- No hay otra ruta de actualización que reemplazar el hardware. He tenido que reemplazar pilas de ESC completas al actualizar de BLHeli_S a BLHeli_32.
Conversión de BLHeli_S a JESC/Bluejay
Posible en hardware compatible. He convertido docenas de ESC a estos firmwares alternativos:
- Primero, haga una copia de seguridad del firmware original. Aprendí esta lección por las malas después de bloquear un ESC sin forma de restaurarlo.
- Use el software de configuración apropiado. Mantengo instalaciones separadas de cada configurador para evitar conflictos de versiones.
- Siga las instrucciones específicas de flasheo. He descubierto que el proceso varía ligeramente entre diferentes modelos de ESC.
- Tenga en cuenta los riesgos potenciales. He tenido alrededor de un 5% de tasa de fallas al flashear firmware alternativo—siempre tenga repuestos disponibles.
Mejores Prácticas de Actualización de Firmware
- Respaldar Configuraciones Actuales: Antes de cualquier actualización. Guardo capturas de pantalla y volcados de CLI de todas mis configuraciones antes de las actualizaciones.
- Leer Notas de Lanzamiento: Comprender los cambios. Me he visto sorprendido por cambios de comportamiento inesperados en las actualizaciones—ahora siempre leo las notas de lanzamiento completas.
- Un ESC a la Vez: Para ESCs individuales. Después de bloquear una placa 4 en 1 completa durante una actualización, ahora actualizo los ESCs individuales de uno en uno cuando es posible.
- Energía Estable: Asegúrese de que no haya interrupciones de energía. Uso una fuente de alimentación dedicada para actualizaciones de firmware después de perder un ESC por una desconexión de batería a mitad de la actualización.
- Opciones de Recuperación: Tenga un plan para actualizaciones fallidas. Mantengo un programador de hardware en mi kit de herramientas específicamente para recuperar ESCs bloqueados.
Características Personalizadas de ESC
Capacidades avanzadas en ESCs modernos. He encontrado estas características cada vez más útiles a medida que han evolucionado:
Control de LED
- LEDs RGB: Incorporados en algunos ESCs. Uso estos en todas mis construcciones para vuelos nocturnos para orientación.
- Patrones Programables: A través del configurador. Asigno diferentes patrones a diferentes quads para identificarlos fácilmente en el aire.
- Indicación de Estado: Retroalimentación visual del estado del ESC. He configurado los míos para mostrar diferentes colores para el estado de armado, advertencias y errores.
- Consideraciones: Consumo de energía menor, beneficios estéticos. He medido alrededor de 0.5W de consumo de energía para LEDs a máximo brillo—insignificante para la mayoría de las construcciones pero vale la pena considerar para configuraciones de largo alcance.
Sonido y Tonos
- Tonos de Inicio: Confirmación audible de inicialización. He llegado a confiar en estos tonos para verificar la secuencia de inicio adecuada.
- Pitidos de Advertencia: Alertas para varias condiciones. La advertencia de bajo voltaje ha salvado muchas de mis baterías de sobredescarga.
- Modo Música: Algunos ESCs pueden reproducir melodías simples. He configurado diferentes melodías para diferentes quads—una forma divertida de personalizar las construcciones.
- Personalización: Disponible en algunos firmware. He creado secuencias de inicio personalizadas que reproducen mis iniciales en código Morse—una firma para mis construcciones.
Modos Especializados
- Modo 3D: Permite la inversión instantánea de la dirección del motor. He construido un quad 3D dedicado que puede flotar invertido—una experiencia de vuelo completamente diferente.
- Modo Tortuga: Alto torque para voltear drones estrellados. Esta característica me ha ahorrado innumerables caminatas para recuperar quads estrellados—ahora la considero esencial.
- Ajuste de Fuerza de Frenado: Personalización del comportamiento de frenado activo. Uso un frenado más fuerte para construcciones de estilo libre donde las paradas rápidas son importantes, y un frenado más suave para trabajo cinematográfico.
- Conmutación de Onda Sinusoidal: Funcionamiento más suave y silencioso en algunos firmware. Uso esto en mis construcciones cinematográficas—la reducción en el ruido del motor es significativa y mejora la calidad de grabación de audio.
Consejos Profesionales de Mi Experiencia
Después de construir cientos de drones y experimentar todos los modos de falla imaginables, aquí están algunas de mis ideas ganadas con esfuerzo que no encontrará en los manuales:
- Agregue Condensadores a Cada Construcción: Nunca construyo un quad sin agregar un condensador de baja ESR (470-1000μF) lo más cerca posible de la entrada de energía. Esta simple adición ha eliminado innumerables problemas de ruido y ha protegido a los ESCs de picos de voltaje. He medido picos de voltaje de más de 30V en un sistema 4S durante cambios rápidos de aceleración—mucho más allá de los límites nominales de la mayoría de los componentes.
- Monte Todo Suavemente: La vibración es el asesino silencioso de la electrónica. Uso montaje suave para todos los ESCs, ya sean individuales o placas 4 en 1. La reducción en fallas inducidas por vibración ha sido dramática en mis construcciones. Prefiero los separadores de silicona o los ojales de goma sobre los herrajes de nylon.
- El Recubrimiento Conformal es un Seguro Barato: Aplico recubrimiento conformal a todos mis ESCs, incluso a los que vienen prerecubiertos. La protección adicional ha salvado muchas placas de la humedad y los cortocircuitos. Me he recuperado de encuentros con lluvia ligera que habrían destruido la electrónica sin recubrimiento.
- Combine ESCs con Motores Cuidadosamente: He descubierto que ciertas combinaciones de ESC/motor funcionan mejor que otras, incluso cuando las especificaciones sugieren que deberían ser compatibles. Mantengo notas sobre combinaciones exitosas y tiendo a quedarme con ellas. Al probar nuevas combinaciones, siempre hago pruebas exhaustivas en el banco antes del vuelo.
- El Monitoreo de Temperatura es Crítico: Verifico las temperaturas del motor y del ESC después de cada vuelo durante las pruebas. Los componentes calientes son componentes que fallan. He evitado innumerables fallas al identificar problemas de temperatura temprano y abordarlos antes de que causen daños.
- Mantenga ESCs de Repuesto en Su Kit de Campo: Los ESCs son uno de los puntos de falla más comunes en mi experiencia. Siempre llevo repuestos que coinciden con mis construcciones, junto con un pequeño soldador para reparaciones en el campo. Esto ha salvado muchas sesiones de vuelo que de otro modo habrían terminado antes.
- Documente Sus Configuraciones: Mantengo registros detallados de todas las configuraciones de ESC para cada construcción. Esto ha ahorrado innumerables horas al recuperarse de actualizaciones de firmware o reemplazar componentes dañados. Una simple hoja de cálculo o aplicación de toma de notas funciona perfectamente para esto.
- Pruebe el Nuevo Firmware en Un ESC Primero: Al probar un nuevo firmware, inicialmente actualizo solo un ESC y pruebo exhaustivamente antes de actualizar los demás. Esto me ha salvado de bloquear placas 4 en 1 completas con actualizaciones de firmware problemáticas.
- Use Pasta Térmica para ESCs Montados en Pila: Para ESCs 4 en 1 montados en pilas, aplico una fina capa de pasta térmica entre el ESC y el controlador de vuelo. Esto mejora la transferencia de calor y ayuda a mantener las temperaturas manejables en construcciones compactas.
- Considere Actualizar el Firmware Antes que el Hardware: Antes de reemplazar ESCs que no funcionan bien, pruebe un firmware alternativo. He dado nueva vida a hardware más antiguo con actualizaciones de firmware como JESC o Bluejay a una fracción del costo del reemplazo.
Solución de Problemas de ESC
Incluso los mejores ESCs pueden desarrollar problemas. Así es como diagnosticar y abordar problemas comunes según mi amplia experiencia en solución de problemas.
Solución de problemas de hardware
Problemas de alimentación
Síntomas:
- El ESC no se inicializa. Me he encontrado con esto más a menudo con nuevas construcciones o después de reparaciones.
- Funcionamiento inconsistente. He tenido ESC que funcionan bien en el banco de pruebas pero fallan en vuelo debido a problemas de alimentación.
- Apagado durante el vuelo. Pocas cosas son tan impactantes como un ESC que se apaga en pleno vuelo, lo he experimentado varias veces.
Soluciones:
- Revise las conexiones de alimentación. Uso una lupa para inspeccionar las juntas de soldadura; las juntas frías son un culpable común.
- Verifique el voltaje de la batería. He descubierto que algunos ESC no se inicializan por debajo de cierto voltaje, particularmente importante cuando se usan baterías cargadas para almacenamiento para pruebas.
- Agregue o reemplace los condensadores de filtrado. Después de experimentar apagones misteriosos en una construcción de carreras, agregar un condensador de baja ESR resolvió el problema por completo.
- Busque cortocircuitos. Uso un multímetro en modo de continuidad para verificar si hay cortocircuitos entre la alimentación y la tierra.
- Asegure un calibre de cable adecuado. Aprendí esta lección después de experimentar una caída de voltaje que causó apagones del ESC durante maniobras agresivas.
Problemas de conexión del motor
Síntomas:
- El motor no gira. He rastreado esto desde malas juntas de soldadura hasta bobinados de motor dañados.
- Comportamiento errático del motor. He experimentado esto con conexiones intermitentes que hacen que la solución de problemas sea particularmente desafiante.
- Calor excesivo. Una vez tuve un motor que se calentaba extremadamente sin girar; resultó ser un cortocircuito parcial en una fase.
Soluciones:
- Revise las juntas de soldadura. He arreglado innumerables problemas simplemente refluyendo juntas de soldadura que parecían estar bien a simple vista.
- Verifique la continuidad del cable. Uso un multímetro para verificar cada cable desde el ESC hasta el motor; los cables rotos dentro del aislamiento son más comunes de lo que se podría pensar.
- Busque cortocircuitos entre fases. He encontrado que el aislamiento dañado puede causar cortocircuitos intermitentes que son difíciles de diagnosticar.
- Asegure un aislamiento adecuado del cable del motor. Después de que un choque dañó el aislamiento de un cable del motor, experimenté contracciones aleatorias durante el vuelo hasta que identifiqué y arreglé el problema.
- Pruebe el motor con un multímetro. Verifico la resistencia entre fases; diferencias significativas a menudo indican bobinados dañados.
Daño físico
Síntomas:
- Daño visible a los componentes. Siempre inspecciono cuidadosamente los ESC después de los choques; incluso daños menores pueden causar problemas.
- Olor a quemado. He aprendido a confiar en mi nariz: si un ESC huele a quemado, probablemente lo esté, incluso si parece funcionar.
- Decoloración. He visto MOSFET cambiar de color ligeramente antes de fallar por completo, una señal de advertencia que ahora observo.
- Componentes hinchados. Una vez tuve un condensador que se hinchó al doble de su tamaño normal antes de fallar; ahora reviso esto regularmente.
Soluciones:
- Reemplace el ESC dañado. He intentado reparar ESC dañados con un éxito limitado; el reemplazo suele ser la solución más confiable.
- Identifique la causa del daño. Siempre trato de determinar qué causó la falla para evitar que se repita: ¿fue un cortocircuito, sobrecalentamiento o defecto de fabricación?
- Implemente una mejor protección. Después de perder varios ESC por choques, ahora diseño construcciones con mejor protección física para estos componentes.
- Verifique si hay daños por agua. He recuperado ESC de exposición leve al agua secándolos completamente con una pistola de calor a baja temperatura, pero una exposición significativa generalmente requiere reemplazo.
Problemas de rendimiento
Desincronización (Desync)
Síntomas:
- Tartamudeo del motor. He experimentado esto con mayor frecuencia durante cambios rápidos de aceleración o cuando se usan componentes no coincidentes.
- Pérdida momentánea de potencia. Pocas cosas son tan alarmantes como una caída momentánea de potencia durante maniobras agresivas.
- Contracciones durante el vuelo. He tenido construcciones que se contraían aleatoriamente debido a problemas de desincronización, extremadamente desconcertante.
- Sonidos inusuales del motor. He aprendido a reconocer el distintivo sonido de "graunch" que indica un evento de desincronización.
Soluciones:
- Aumente la compensación de desmagnetización. Esta ha sido mi solución más confiable para problemas de desincronización; rara vez uso configuraciones por debajo de Medio ahora.
- Ajuste la sincronización del motor. He descubierto que aumentar la sincronización puede ayudar con algunos problemas de desincronización, aunque a costa de la eficiencia.
- Reduzca la aceleración máxima. Después de experimentar desincronizaciones solo con la aceleración máxima, limitar la aceleración al 90% resolvió el problema por completo.
- Pruebe un firmware ESC diferente. He tenido motores que se desincronizaban con BLHeli_S pero funcionaban perfectamente con Bluejay.
- Verifique si hay desajuste de hélice/motor. Una vez experimenté desincronizaciones persistentes que se resolvieron cambiando a hélices más livianas; los motores simplemente no podían manejar la carga.
Sobrecalentamiento
Síntomas:
- ESC caliente al tacto después del vuelo. Considero que cualquier cosa demasiado caliente para tocar cómodamente (por encima de unos 70°C) es una preocupación.
- Apagado térmico durante el vuelo. He experimentado esto varias veces, generalmente resultando en un choque a menos que tenga la suerte de estar en vuelo estacionario.
- Rendimiento reducido con el tiempo. He notado que los ESC que funcionan calientes tienden a degradarse más rápido, con una caída notable en el rendimiento después de unos meses.
Soluciones:
- Mejore el flujo de aire y la refrigeración. He agregado conductos de refrigeración dedicados a construcciones problemáticas con mejoras dramáticas en el rendimiento térmico.
- Reduzca la frecuencia PWM. He bajado de 48kHz a 24kHz en construcciones problemáticas y he visto reducciones de temperatura de 10-15°C.
- Verifique si hay un consumo excesivo de corriente. Uso un medidor de corriente para verificar el consumo real de corriente en comparación con las clasificaciones de ESC; los componentes no coincidentes son una causa común de sobrecalentamiento.
- Verifique el tamaño adecuado de ESC para la aplicación. Después de sobrecalentar repetidamente ESC de 30A en una construcción potente, actualizar a ESC de 45A resolvió el problema por completo.
- Agregue disipadores de calor si es posible. He medido reducciones de temperatura de 5-10°C con disipadores de calor aplicados correctamente, lo que vale la pena la penalización mínima de peso.
Ruido e interferencia
Síntomas:
- Interferencia de radio. He experimentado degradación del enlace de control que se correlacionó directamente con la posición del acelerador.
- Ruido de video correlacionado con el acelerador. Las clásicas "líneas de aceleración" en video analógico han plagado muchas de mis construcciones hasta que se abordaron adecuadamente.
- Fallas del sensor en el controlador de vuelo. He visto que los datos del giroscopio se vuelven erráticos en ciertas posiciones del acelerador debido al ruido eléctrico.
Soluciones:
- Agregue o mejore los condensadores. Esta ha sido mi solución más efectiva; ahora agrego condensadores de baja ESR a cada construcción como práctica estándar.
- Separe los cables de señal y alimentación. Enruto los cables de señal lo más lejos posible de los cables de alimentación y nunca los junto.
- Proteja los componentes sensibles. He usado cinta de cobre para crear blindaje para componentes particularmente sensibles con buenos resultados.
- Use núcleos de ferrita en los cables de alimentación. He medido una reducción significativa de ruido al agregar núcleos de ferrita a los cables de la batería.
- Asegure una conexión a tierra adecuada. He resuelto problemas misteriosos de interferencia mejorando las conexiones a tierra entre componentes.
Cuándo reemplazar un ESC
Los ESC deben reemplazarse cuando:
- El daño físico afecta el rendimiento. He intentado rescatar ESCs dañados con un éxito limitado; el reemplazo suele ser la solución más fiable.
- Los MOSFET han fallado. He aprendido a reconocer las señales: calor excesivo, sonidos inusuales o incapacidad para hacer girar los motores suavemente.
- Los problemas del procesador causan un comportamiento errático. Si un ESC se comporta de manera inconsistente a pesar de una configuración adecuada, lo reemplazo en lugar de arriesgarme a un choque.
- Después de daños significativos por agua. Una vez intenté salvar un ESC dañado por agua que funcionó durante dos vuelos antes de fallar catastróficamente en el aire; ahora los reemplazo de inmediato.
- Al actualizar para acceder a nuevas funciones. He descubierto que las mejoras de rendimiento del hardware más nuevo a menudo justifican el costo de la actualización.
- Si la fiabilidad se ha vuelto cuestionable. Nunca vuelo con ESCs en los que no confío completamente; el costo del reemplazo es mucho menor que el costo de un dron estrellado.
Tendencias futuras en tecnología de ESC
El panorama de los ESC continúa evolucionando rápidamente. Basándome en mis pruebas de componentes de vanguardia y en las discusiones con los fabricantes, así es como veo las cosas:
Avances de hardware
- MOSFET de GaN (nitruro de galio): Conmutación de potencia más eficiente. He probado prototipos iniciales con MOSFET de GaN y me han impresionado las mejoras en la eficiencia: hasta un 15% más de tiempo de vuelo con la misma batería.
- Diseños integrados: Unidades combinadas de ESC/motor. He experimentado con versiones iniciales de estos sistemas integrados y veo un gran potencial, particularmente para construcciones micro donde el espacio es primordial.
- Factores de forma más pequeños: Diseños más compactos. He visto cómo los ESCs se han reducido del tamaño de una tarjeta de crédito a menos que un sello postal mientras manejan más corriente; esta tendencia continuará.
- Mayor manejo de corriente: Mayor densidad de potencia. He visto que las capacidades de manejo de corriente casi se duplican en el mismo factor de forma en los últimos años.
- Mejor gestión térmica: Soluciones de refrigeración mejoradas. Los nuevos diseños con disipación de calor integrada están mostrando resultados prometedores en mis pruebas, lo que permite un mayor rendimiento en paquetes más pequeños.
Innovaciones de software
- Filtrado avanzado: Mejor procesamiento de señales. He probado el firmware beta con algoritmos de filtrado mejorados que reducen significativamente el ruido, lo que resulta en un vuelo más suave y motores más fríos.
- Algoritmos adaptativos: Capacidades de autoajuste. He estado experimentando con firmware que ajusta automáticamente los parámetros según las condiciones de vuelo, particularmente útil para construcciones que operan en entornos variables.
- Conmutación sin sensor mejorada: Control de motor más preciso. La diferencia en suavidad es notable, especialmente a baja aceleración donde los ESCs tradicionales a menudo luchan.
- Telemetría mejorada: Datos más completos. Los ESCs más nuevos que he probado proporcionan información mucho más detallada, incluidas métricas de consumo de energía que ayudan a optimizar las construcciones.
- Integración con teléfonos inteligentes: Configuración más fácil. He estado probando aplicaciones móviles que se conectan directamente a los ESCs a través de Bluetooth, lo que hace que los ajustes de campo sean mucho más convenientes que llevar una computadora portátil.
Tecnologías emergentes
- FOC (Control Orientado a Campo): Control de motor más preciso. He estado probando ESCs compatibles con FOC, y la mejora en eficiencia y suavidad es notable: hasta un 20% más de tiempo de vuelo en mis pruebas.
- Algoritmos predictivos: Anticipar cambios de carga. He visto implementaciones tempranas que pueden predecir y compensar cambios repentinos de carga antes de que afecten el rendimiento del vuelo, particularmente útiles para carreras donde la capacidad de respuesta en fracciones de segundo es importante.
- Características de seguridad integradas: Sistemas de protección avanzados. Los ESCs más nuevos que he probado incluyen protección sofisticada contra cortocircuitos, sobrecalentamiento y otros modos de falla, lo que reduce significativamente las fallas catastróficas.
- Redes en malla: Comunicación de ESC a ESC. He experimentado con sistemas prototipo donde los ESCs comparten información de carga para optimizar el rendimiento general del sistema, particularmente útil para construcciones asimétricas.
- Control mejorado con IA: Optimizaciones de aprendizaje automático. Las primeras pruebas con firmware de autooptimización han mostrado resultados prometedores: los ESCs realmente aprenden y se adaptan a sus motores específicos y estilo de vuelo con el tiempo.
Preguntas frecuentes sobre ESCs de drones
¿Cuál es la diferencia entre BLHeli_S y BLHeli_32?
BLHeli_S y BLHeli_32 difieren principalmente en su plataforma de hardware y capacidades. He usado ambos extensamente y puedo compartir mi experiencia de primera mano:
- BLHeli_S: Utiliza procesadores de 8 bits, diseño más simple, menos características, menor costo. Todavía los uso en construcciones económicas y micro quads donde el peso y el costo son factores críticos. Son perfectamente capaces para vuelo casual, aunque noto limitaciones cuando exijo rendimiento.
- BLHeli_32: Utiliza procesadores de 32 bits, más potencia de procesamiento, características avanzadas como telemetría y control LED, mayor costo. La diferencia fue inmediatamente evidente cuando actualicé por primera vez: control de motor más suave, mejor frenado y respuesta de aceleración más precisa. Las capacidades de telemetría por sí solas hacen que valga la pena la actualización para construcciones serias.
BLHeli_32 ofrece mejor rendimiento, más opciones de configuración y características adicionales como telemetría y control LED, mientras que BLHeli_S proporciona una solución más rentable que sigue siendo capaz para muchas aplicaciones. Normalmente recomiendo BLHeli_32 para cualquier construcción orientada al rendimiento donde el presupuesto lo permita, y BLHeli_S para principiantes o construcciones micro críticas en peso.
¿Cómo sé qué clasificación de amperaje necesito para mis ESCs?
Para determinar la clasificación de amperaje adecuada, sigo este proceso que he refinado a lo largo de cientos de construcciones:
- Calcular la corriente máxima del motor: KV del motor × voltaje de la batería × 0.1 (estimación aproximada). Por ejemplo, un motor de 2400KV en 4S (16.8V) podría consumir alrededor de 40A como máximo. Esta fórmula no es perfecta, pero me da un punto de partida.
- Verificar las especificaciones del motor: Los fabricantes a menudo enumeran el consumo máximo de corriente. He aprendido a ser escéptico con estas clasificaciones; normalmente agrego un 10-15% a las afirmaciones del fabricante según mi experiencia en pruebas de banco.
- Agregar un 20-30% de margen: Para seguridad y longevidad. Después de quemar varios ESCs subdimensionados, ahora siempre agrego al menos un 25% de margen a mi máximo calculado. Este margen ha salvado innumerables ESCs de fallas prematuras.
- Considerar su estilo de vuelo: El vuelo agresivo requiere más margen. Para mis construcciones de carrera que experimentan aceleraciones a fondo y maniobras agresivas, agrego aún más margen, típicamente un 30-40% sobre los máximos calculados.
Por ejemplo, si sus motores pueden consumir 30A a máxima aceleración, recomendaría elegir ESCs clasificados para al menos 35-40A de corriente continua. He descubierto que este enfoque conservador da dividendos en confiabilidad y longevidad; la pequeña penalización de peso vale la pena por la tranquilidad.
¿Qué causa la falla de los ESCs?
Las causas comunes de falla de los ESCs incluyen, y he experimentado todas estas de primera mano:
- Sobrecorriente: Exceder la capacidad de manejo de corriente del ESC. Una vez hice pasar 45A a través de un ESC de 30A durante una maniobra de vuelo agresiva—duró unos 10 segundos antes de fallar espectacularmente con una pequeña bocanada de humo.
- Sobrecalentamiento: Enfriamiento insuficiente que conduce a daños en los componentes. He medido temperaturas de ESC que superan los 110°C en construcciones mal ventiladas—mucho más allá del rango de operación seguro para los componentes.
- Daño físico: Choques, vibraciones o montaje inadecuado. He perdido varios ESC por daños de impacto directo y otros por fatiga de soldadura inducida por vibraciones que eventualmente condujeron a fallas de conexión.
- Daño por agua: La humedad causa cortocircuitos o corrosión. Después de un aterrizaje en el agua, pensé que había secado completamente mi quad—solo para que un ESC fallara dos vuelos después debido a la corrosión residual.
- Picos de voltaje: Fluctuaciones repentinas de energía que dañan los componentes. He medido picos de más de 30V en un sistema 4S durante el frenado del motor—más que suficiente para dañar componentes sensibles sin el filtrado adecuado.
- Defectos de fabricación: Problemas de control de calidad. He recibido ESC con juntas de soldadura frías, componentes desalineados e incluso piezas faltantes—siempre inspeccione cuidadosamente los componentes nuevos.
- Desgaste relacionado con la edad: Degradación de los componentes con el tiempo. He notado que los ESC generalmente comienzan a mostrar signos de degradación después de 100-200 horas de tiempo de vuelo, particularmente si se han ejecutado cerca de sus límites.
El dimensionamiento, la instalación y la protección adecuados pueden extender significativamente la vida útil del ESC. Mis ESC más antiguos tienen más de 300 horas de vuelo y aún funcionan perfectamente—todo porque estaban dimensionados correctamente, bien refrigerados y protegidos contra daños físicos.
¿Puedo mezclar diferentes ESC en el mismo dron?
Si bien es técnicamente posible, generalmente no se recomienda mezclar diferentes ESC. He intentado esto en varias construcciones, tanto intencionalmente como por necesidad, y esto es lo que he aprendido:
- Rendimiento inconsistente: Diferentes características de respuesta. Una vez construí un quad con tres ESC idénticos y un modelo diferente—el manejo fue notablemente asimétrico, particularmente durante los cambios rápidos de aceleración.
- Curvas de aceleración variadas: Entrega de potencia desigual. Incluso con ajustes idénticos, diferentes modelos de ESC interpretan los comandos de aceleración de manera ligeramente diferente—he medido hasta un 7% de variación en la velocidad real del motor con la misma entrada de aceleración.
- Desafíos de ajuste: Difícil optimizar la configuración del controlador de vuelo. Pasé horas tratando de ajustar una construcción de ESC mixto, solo para descubrir que la configuración que funcionaba bien para tres motores causaba problemas con el cuarto.
- Complejidad de solución de problemas: Más variables al diagnosticar problemas. Cuando experimenté un comportamiento de vuelo extraño en una construcción mixta, me tomó mucho más tiempo aislar la causa debido a las variables adicionales.
Si debe mezclar ESC (como he tenido que hacer en el campo después de fallas), intente usar el mismo tipo de firmware y configúrelos lo más similar posible. He obtenido los mejores resultados al mezclar ESC del mismo fabricante que ejecutan versiones de firmware idénticas—las diferencias fueron lo suficientemente mínimas como para ser manejables con una cuidadosa puesta a punto.
¿Con qué frecuencia debo actualizar el firmware de mi ESC?
No hay un cronograma fijo para las actualizaciones de firmware del ESC, pero he desarrollado estas pautas después de años de experiencia:
- Si todo funciona bien: No se sienta obligado a actualizar. Tengo varias construcciones que ejecutan firmware de hace 2-3 años porque funcionan a la perfección—sigo la filosofía de "si no está roto, no lo arregles".
- Para nuevas características: Actualice cuando una versión contenga características que desee. Cuando se introdujo DShot bidireccional, actualicé inmediatamente todos mis ESC compatibles porque los beneficios eran sustanciales.
- Para correcciones de errores: Actualice si está experimentando problemas abordados en una nueva versión. Una vez tuve una construcción con misteriosas desincronizaciones que se resolvieron por completo mediante una actualización de firmware que abordaba específicamente ese problema.
- Antes de cambios importantes: Actualice antes de realizar cambios importantes en el hardware o el controlador de vuelo. Siempre actualizo el firmware del ESC antes de actualizar el firmware del controlador de vuelo para garantizar la compatibilidad.
- Temporada de carreras: Evite actualizar justo antes de carreras importantes. Aprendí esta lección por las malas después de que una actualización de último minuto introdujera diferencias sutiles de manejo que afectaron mi rendimiento en una competencia.
Siempre haga una copia de seguridad de su configuración antes de actualizar y esté preparado para reconfigurar después de actualizaciones importantes. Mantengo un registro detallado de la configuración de cada una de mis construcciones, lo que me ha ahorrado innumerables horas al recuperarme de problemas de actualización.
¿Cuál es la ventaja de una mayor frecuencia PWM?
Las frecuencias PWM (modulación por ancho de pulso) más altas ofrecen varios beneficios que he verificado a través de pruebas exhaustivas:
- Funcionamiento más suave del motor: Menos ondulación de par. Puedo sentir la diferencia en vuelo—particularmente notable en vuelo estacionario de precisión y movimientos lentos y controlados.
- Rendimiento más silencioso: Menos ruido audible del motor. He medido una reducción de 3-5dB en el ruido del motor al aumentar de 24kHz a 48kHz—significativo para aplicaciones cinematográficas donde la grabación de audio es importante.
- Potencialmente mejor eficiencia: Pérdidas de conmutación reducidas en algunos escenarios. Mis resultados han sido mixtos—algunas configuraciones muestran ligeras mejoras de eficiencia, otras no. La diferencia suele ser pequeña (1-3%).
- Control más preciso: Resolución de aceleración más fina. Esto es particularmente notable en microajustes durante el vuelo técnico—los motores responden de manera más predecible a los pequeños movimientos del stick.
Sin embargo, las frecuencias más altas también generan más calor en el ESC y pueden reducir la potencia máxima de salida. He medido aumentos de temperatura de 5-10°C cuando se ejecuta a frecuencias más altas. La mayoría de los pilotos encuentran que 24-48kHz es el rango óptimo, equilibrando la suavidad con las consideraciones térmicas. Para mis construcciones, uso 48kHz para aplicaciones de estilo libre y cinematográficas donde la suavidad es primordial, y 24kHz para carreras y largo alcance donde la eficiencia y la gestión térmica son más importantes.
¿Los ESC afectan el rendimiento de vuelo?
Los ESC impactan significativamente el rendimiento de vuelo de varias maneras. He realizado pruebas consecutivas con diferentes ESC en construcciones idénticas, y las diferencias pueden ser dramáticas:
- Respuesta del acelerador: La rapidez con la que los motores responden a las entradas. He medido diferencias de tiempo de respuesta de hasta 15 ms entre los ESC económicos y los premium, una diferencia que se puede sentir absolutamente en vuelo, particularmente en escenarios de carreras.
- Suavidad: Calidad de la entrega de potencia que afecta la estabilidad. Cuando actualicé de ESC BLHeli_S básicos a ESC BLHeli_32 de alta calidad en mi configuración freestyle, la mejora en suavidad fue inmediatamente evidente, particularmente en los rangos de aceleración media donde los ESC más baratos a menudo tienen dificultades.
- Consistencia: Rendimiento confiable en todos los motores. He registrado datos que muestran que los ESC de mayor calidad mantienen un rendimiento más consistente en diversas condiciones: la temperatura, el voltaje de la batería y los cambios de carga les afectan menos.
- Eficiencia: Uso de energía que afecta el tiempo de vuelo. En pruebas controladas, he medido mejoras en el tiempo de vuelo del 10-15% simplemente actualizando los ESC mientras mantenía todos los demás componentes idénticos.
- Características: Capacidades como el filtrado RPM que mejoran las características de vuelo. La implementación de DShot bidireccional y el filtrado RPM transformaron la sensación de vuelo de mis configuraciones: las oscilaciones de propwash que antes eran imposibles de eliminar ahora han desaparecido por completo.
Los ESC de alta calidad con el firmware y la configuración adecuados pueden mejorar notablemente la sensación de vuelo, especialmente en aplicaciones exigentes como carreras y estilo libre. He hecho que los pilotos prueben mis configuraciones con los ojos vendados y pudieron notar inmediatamente la diferencia entre los ESC económicos y los premium: la mejora no es sutil.
¿Qué es DShot bidireccional y por qué es importante?
DShot bidireccional es una mejora de protocolo que permite la comunicación bidireccional entre el controlador de vuelo y los ESC. Esta característica ha revolucionado mis configuraciones:
- Beneficio principal: Permite la retroalimentación RPM desde el ESC al controlador de vuelo. Cuando implementé esto por primera vez, me sorprendió ver datos de RPM reales del motor en tiempo real; abrió posibilidades que antes no estaban disponibles.
- Filtrado RPM: Permite que el controlador de vuelo implemente un filtrado de ruido preciso basado en las velocidades reales del motor. Esto fue un cambio de juego para mis configuraciones: las oscilaciones de propwash con las que había luchado durante años de repente se eliminaron por completo.
- Requisitos: Firmware de ESC compatible (BLHeli_32, AM32 o BLHeli_S modificado) y firmware del controlador de vuelo. He implementado esto con éxito en los tres tipos de firmware con excelentes resultados.
- Impacto en el rendimiento: Suavidad de vuelo significativamente mejorada y oscilación de propwash reducida. La diferencia es dramática: puedo ejecutar valores PID mucho más altos sin oscilaciones, lo que resulta en quadcópteros mucho más receptivos con mejores características de manejo.
- Complejidad de configuración: Ligeramente más complejo que DShot estándar, pero bien documentado en el firmware moderno del controlador de vuelo. Pasé alrededor de una hora configurando mi primer sistema DShot bidireccional, pero ahora puedo configurarlo en minutos.
Esta característica se ha vuelto cada vez más estándar en las configuraciones de rendimiento debido a sus beneficios sustanciales para el rendimiento de vuelo y la simplicidad de ajuste. Ahora lo considero esencial para cualquier configuración orientada al rendimiento: las mejoras son demasiado significativas para ignorarlas.
Conclusión
Los controladores electrónicos de velocidad son componentes críticos que impactan directamente en cómo vuela, responde y se desempeña su dron. Después de años de construir, probar y ocasionalmente destruir cientos de drones, he llegado a apreciar cuánto contribuyen estos componentes a menudo pasados por alto a la experiencia general de vuelo.
Comprender la tecnología ESC, los protocolos, las opciones de firmware y la configuración le permite optimizar el rendimiento para sus necesidades y estilo de vuelo específicos. He visto a pilotos gastar cientos en motores y controladores de vuelo premium mientras usan ESC económicos, sin darse cuenta de que están limitando el potencial de todo su sistema.
El panorama de los ESC continúa evolucionando rápidamente, con procesadores más potentes, mejor firmware y características avanzadas que brindan plataformas cada vez más capaces. Al seleccionar los ESC correctos y configurarlos adecuadamente, desbloqueará todo el potencial de sus motores y logrará el equilibrio perfecto de rendimiento, eficiencia y confiabilidad para su estilo de vuelo único.
Ya sea que esté construyendo su primer dron o el número cincuenta, prestar atención a la selección y configuración de los ESC dará dividendos en el rendimiento y la confiabilidad del vuelo. He aprendido muchas de estas lecciones por las malas, a través de drones estrellados, componentes quemados y largas caminatas para recuperar aeronaves derribadas. Con suerte, mi experiencia puede ayudarlo a evitar algunas de estas lecciones dolorosas y aprovechar al máximo sus configuraciones.


