Drohnen-ESCs: Prinzipien und Funktionsweise
Electronic Speed Controller (ESCs) sind das entscheidende Bindeglied zwischen Ihrem Flugcontroller und den Motoren. Sie übersetzen digitale Befehle in die präzise Leistungsabgabe, die Ihre Drohne in der Luft hält. Nach Jahren des Baus und Testens von Hunderten von Drohnen habe ich gelernt, dass diese hochentwickelten Geräte weit mehr sind als einfache Motortreiber - sie sind funktionsreiche Komponenten mit eigenen Prozessoren, Firmware und Fähigkeiten, die Ihr Flugerlebnis entscheidend beeinflussen können. Ich habe auf die harte Tour gelernt, dass ein ESC-Ausfall mehr bedeutet als nur eine abgestürzte Drohne; oft bedeutet es einen langen Fußmarsch durch schwieriges Gelände, um das zu bergen, was von Ihrem Stolz und Ihrer Freude übrig geblieben ist.
Dieser umfassende Leitfaden untersucht ESC-Technologie, Protokolle, Firmware-Optionen, Auswahlkriterien und erweiterte Funktionen basierend auf meiner umfangreichen praktischen Erfahrung. Ich werde nicht nur die technischen Spezifikationen teilen, sondern auch die praktischen Erkenntnisse, die ich durch unzählige Builds, Abstürze und Fehlerbehebungssitzungen gewonnen habe, um Ihnen zu helfen, diese kritische Komponente Ihrer FPV-Drohne zu verstehen und zu optimieren.
Einführung in elektronische Geschwindigkeitsregler
Ein ESC ist eine elektronische Schaltung, die die Drehzahl eines bürstenlosen Motors steuert und regelt. Ich erinnere mich noch an meinen ersten Bau mit primitiven ESCs, die die Motoren kaum konstant am Laufen hielten - ein großer Unterschied zu den hochentwickelten Geräten, die wir heute verwenden. In FPV-Drohnen erfüllen ESCs mehrere kritische Funktionen, die ich mit jedem Build mehr zu schätzen gelernt habe:
- Motorsteuerung: Umwandlung von Gleichstrom aus der Batterie in den von bürstenlosen Motoren benötigten Dreiphasen-Wechselstrom. Ich habe den Unterschied zwischen billigen ESCs, die einen rauen, lauten Motorbetrieb erzeugen, und hochwertigen ESCs, die eine sanfte, präzise Leistung liefern, gesehen.
- Drehzahlregelung: Präzise Steuerung der Motor-Drehzahl basierend auf den Befehlen des Flugcontrollers. Die Reaktionsfähigkeit Ihrer Drohne hängt stark davon ab, wie schnell Ihre ESCs die Motordrehzahl anpassen können - etwas, das ich sofort bemerke, wenn ich einen neuen Build teste.
- Bremsen: Aktives Verlangsamen oder Stoppen der Motoren bei Bedarf. Ich habe festgestellt, dass dies besonders wichtig für Freestyle-Fliegen ist, wo schnelle Stopps und Richtungswechsel unerlässlich sind.
- Batterieschutz: Überwachung der Spannung und Implementierung von Abschaltungen, um Schäden zu verhindern. Ich habe dank eines ordnungsgemäßen Unterspannungsschutzes unzählige Batterien vor einem vorzeitigen Tod bewahrt.
- Telemetrie: Bereitstellung von Daten über Leistung, Temperatur und Drehzahl (in fortschrittlichen Modellen). Diese Funktion hat die Art und Weise, wie ich meine Quads abstimme, verändert und Erkenntnisse geliefert, die noch vor wenigen Jahren unmöglich zu erhalten waren.
Die Entwicklung der Drohnen-ESCs
Ich habe die dramatische Entwicklung der ESCs seit 2019, als ich mein Hobby begann, miterlebt, und der Fortschritt war nichts weniger als bemerkenswert:
- Frühe ESCs (2010-2014): Einfache Motortreiber mit begrenzten Funktionen und SimonK-Firmware. Diese primitiven Geräte erforderten eine sorgfältige Kalibrierung und boten minimale Leistung.
- BLHeli-Ära (2015-2017): Verbesserte Leistung, digitale Protokolle und Konfigurationsoptionen. Das war ein Wendepunkt - plötzlich konnten sich die Leute über den Flugcontroller mit den ESCs verbinden und Einstellungen ohne Löten oder Hardware-Programmierer anpassen.
- BLHeli_S (2017-2018): Verbesserte Verarbeitung, bessere Leistung und mehr Funktionen.
- BLHeli_32 (2018-heute): 32-Bit-Verarbeitung, Telemetrie und erweiterte Funktionen.
- Moderne Alternativen (2020+): AM32, JESC und andere Firmware-Optionen mit einzigartigen Funktionen. Ich habe mit diesen neueren Optionen experimentiert, insbesondere mit AM32, das einigen meiner älteren Hardware neues Leben eingehaucht hat.
Diese Entwicklung hat zu kleineren, leistungsfähigeren ESCs mit zunehmend ausgefeilten Funktionen und Leistungen geführt. Ich selbst bin von sperrigen, separaten ESCs, die an jedem Arm montiert werden mussten, zu winzigen 4-in-1-Boards übergegangen, die weniger als ein einziger alter ESC wiegen und dabei weitaus mehr Möglichkeiten bieten.
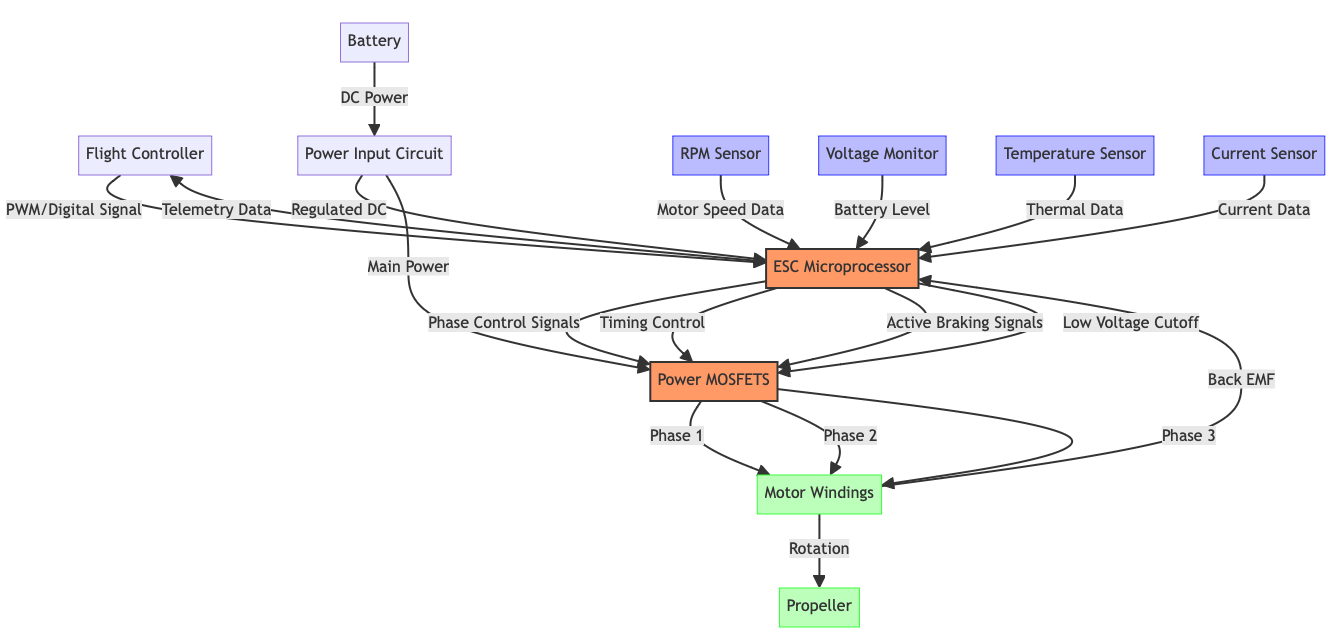
Grundlegende Komponenten eines ESC
Moderne ESCs integrieren mehrere Schlüsselkomponenten, die zusammenarbeiten, um das Flugerlebnis zu schaffen. Lassen Sie mich Ihnen erklären, was ich über Jahre des Bauens und Fehlersuchens über diese Komponenten gelernt habe.
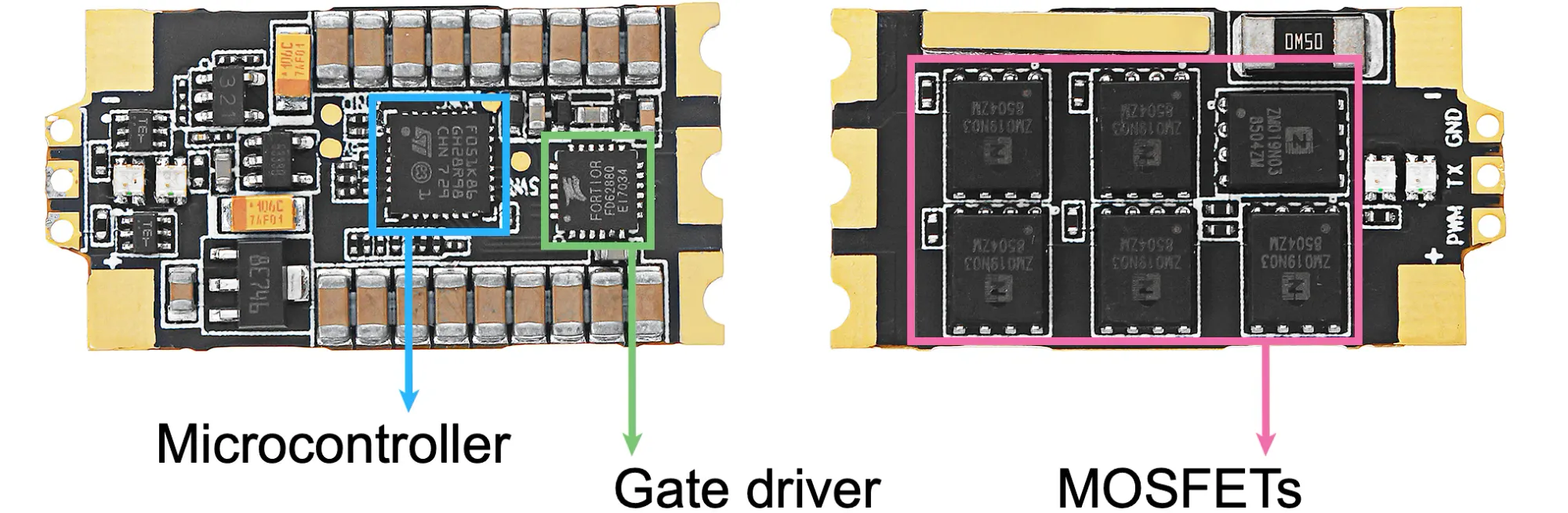
Mikroprozessor
Das Gehirn des ESC, das Befehle verarbeitet und die Leistungsabgabe steuert:
- 8-Bit-Prozessoren: In älteren ESCs und Budget-BLHeli_S-Modellen zu finden. Ich habe mit diesen angefangen, und obwohl sie ihren Zweck erfüllten, waren die Einschränkungen frustrierend, wenn es um Leistung ging.
- 32-Bit-Prozessoren: Verwendet in BLHeli_32 und neueren ESCs, bieten mehr Rechenleistung. Als ich zum ersten Mal auf einen 32-Bit-ESC aufrüstete, war der Unterschied in der Reaktionsfähigkeit und den Funktionen sofort spürbar.
- ARM Cortex: Häufig in Hochleistungs-ESCs zu finden, ermöglichen erweiterte Funktionen. Ich verwende diese in meinen Wettbewerbsbuilds, bei denen jede Millisekunde Reaktionszeit zählt.
MOSFETs (Metall-Oxid-Halbleiter-Feldeffekttransistoren)
Leistungsschaltkomponenten, die den Stromfluss zu den Motorphasen steuern. Ich habe gelernt, dass die MOSFET-Qualität oft das ist, was Premium-ESCs von Budget-Optionen unterscheidet:
- MOSFET-Qualität: Bestimmt Effizienz, Wärmeentwicklung und Strombelastbarkeit. Ich habe genug billige MOSFETs durchgebrannt, um zu wissen, dass sich Investitionen in Qualität hier in Zuverlässigkeit und Leistung auszahlen.
- MOSFET-Anzahl: Typischerweise 6 pro Motor (2 pro Phase). Einige meiner Hochleistungs-Builds verwenden ESCs mit verdoppelten MOSFETs für eine bessere Strombelastbarkeit und Wärmeverteilung.
- MOSFET-Anordnung: Beeinflusst Leistung und Haltbarkeit. Ich habe festgestellt, dass ESCs mit besserer MOSFET-Anordnung auch unter hoher Belastung kühler laufen.
Unterstützende Komponenten
Zusätzliche Schaltkreise, die den ordnungsgemäßen Betrieb ermöglichen. Diese oft übersehenen Komponenten können einen erheblichen Unterschied in der Leistung ausmachen:
- Kondensatoren: Filtern Rauschen und glätten die Stromversorgung. Ich füge meinen Builds immer zusätzliche Filterkondensatoren hinzu, nachdem ich auf die harte Tour gelernt habe, wie sich elektrisches Rauschen auf die Flugleistung auswirken kann.
- Spannungsregler: Versorgen den Mikroprozessor mit der richtigen Spannung. Ich hatte schon ESCs, die aufgrund schlechter Spannungsregelung ausgefallen sind, besonders bei Setups mit höherer Spannung.
- Stromsensoren: Messen den Stromverbrauch (in telemetriefähigen ESCs). Die Genauigkeit dieser Sensoren variiert stark - ich habe festgestellt, dass ESCs der Oberklasse tendenziell eine präzisere Strommessung haben.
- Temperatursensoren: Überwachen die Wärme zum Schutz (in fortgeschrittenen Modellen). Diese Funktion hat mehrere meiner Builds vor Hitzeschäden während langer Flugsessions im Sommer bewahrt.
Eingabe-/Ausgabe-Schnittstellen
Verbindungen für Kommunikation und Stromversorgung:
- Signaleingang: Empfängt Befehle vom Flugcontroller. Ich habe festgestellt, dass die Qualität dieser Verbindungen einen erheblichen Einfluss auf die Zuverlässigkeit hat - kalte Lötstellen hier haben mehr als ein paar mysteriöse Ausfälle in meinen Builds verursacht.
- Stromanschlüsse: Akku-Eingang und Motor-Ausgang-Pads. Ich verwende hier immer Kabel mit geeignetem Querschnitt - ich habe durch einen spektakulären Ausfall gelernt, dass unterdimensionierte Kabel Spitzenströme nicht verkraften können.
- Telemetrie-Ausgang: Sendet Daten zurück an den Flugcontroller (falls unterstützt). Diese Funktion hat die Art und Weise, wie ich meine Quads im Flug überwache, verändert und liefert Echtzeit-Daten, die helfen, Komponentenschäden zu verhindern.
ESC-Hardware-Typen und Konfigurationen
ESCs gibt es in verschiedenen Bauformen und Konfigurationen, um unterschiedlichen Builds und Anforderungen gerecht zu werden. Im Laufe der Jahre habe ich praktisch jede Art von ESC-Konfiguration verwendet, die verfügbar ist, und jede hat ihren Platz, je nachdem, was man baut.
Einzelne vs. 4-in-1 ESCs
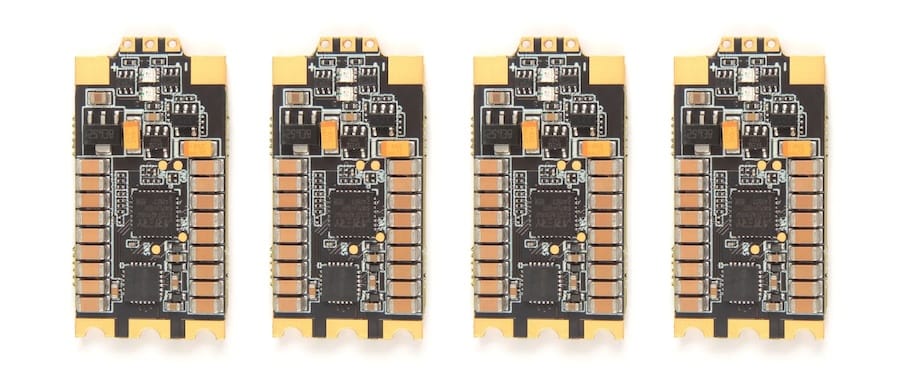
Einzelne ESCs
Separate ESCs für jeden Motor. Damit habe ich angefangen und verwende sie immer noch für bestimmte Builds:
Vorteile:
- Einfacher zu ersetzen, wenn einer ausfällt. Ich habe unzählige Flugsessions gerettet, indem ich einen Ersatz-ESC in meinem Feldkit hatte.
- Bessere Wärmeableitung. Das habe ich besonders wichtig gefunden für Hochleistungs-Builds, die die Grenzen der Strombelastbarkeit ausreizen.
- Kann bei Bedarf verschiedene Leistungsklassen kombinieren. Ich habe asymmetrische Quads gebaut, bei denen verschiedene Motoren unterschiedliche ESC-Leistungen erforderten.
- Oft flexiblere Montagemöglichkeiten. Ich habe einige ungewöhnliche Builds erstellt, bei denen eine Standardmontage nicht möglich war.
Nachteile:
- Höhere Verdrahtungskomplexität. Ich habe viele Stunden damit verbracht, Kabel akribisch zu verlegen, um Builds sauber zu halten.
- Potenziell höheres Gesamtgewicht. Bei Racing-Builds zählt jedes Gramm, und ich habe Unterschiede von 10-15g im Vergleich zu 4-in-1-Lösungen gemessen.
- Nimmt mehr Platz auf dem Rahmen ein. Das schränkt ein, welche anderen Komponenten man hinzufügen kann.
- Normalerweise insgesamt teurer. Ich habe typischerweise 20-30% mehr ausgegeben, wenn ich einzelne ESCs verwendet habe.
Am besten für:
- Größere Builds mit ausreichend Platz. Meine Langstrecken-Cruiser verwenden typischerweise einzelne ESCs.
- Piloten, die Reparierbarkeit priorisieren. Ich empfehle diese Freunden, die in abgelegenen Gebieten fliegen.
- Custom-Builds mit unterschiedlichen Motoranforderungen. Ich habe diese für experimentelle asymmetrische Konfigurationen verwendet.
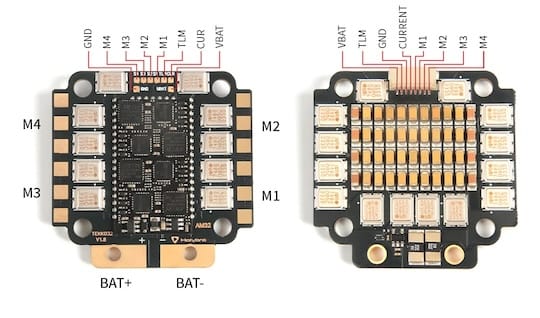
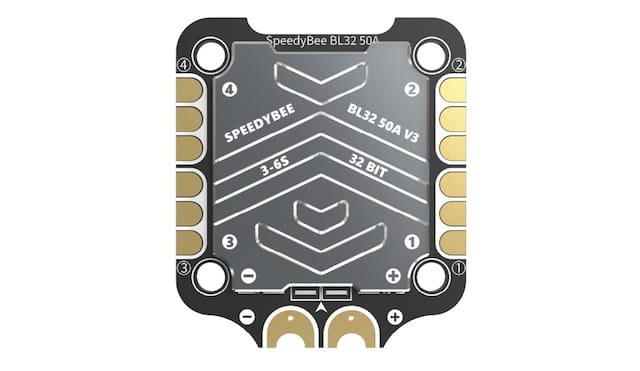
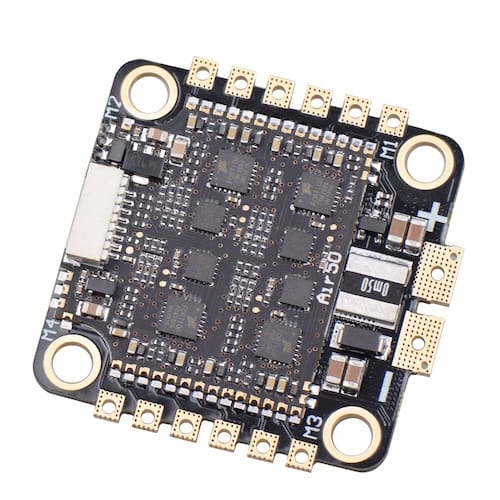
4-in-1 ESC-Boards
Vier ESCs integriert auf einer einzigen Platine. Diese sind für die meisten meiner Builds zum Standard geworden:
Vorteile:
- Sauberere, einfachere Verkabelung. Meine Builds wurden viel ordentlicher, als ich auf 4-in-1 ESCs umgestiegen bin.
- Normalerweise geringeres Gesamtgewicht. Ich habe bei Racing-Builds bis zu 15g eingespart, indem ich 4-in-1 ESCs verwendet habe.
- Nimmt weniger Platz ein. Das ermöglicht kompaktere Builds oder Raum für zusätzliche Komponenten.
- Oft günstiger als Gesamtpaket. Ich spare typischerweise 20-30% im Vergleich zu gleichwertigen einzelnen ESCs.
- Einfachere Installation. Ich kann einen Build in etwa der Hälfte der Zeit fertigstellen, wenn ich einen 4-in-1 ESC verwende.
Nachteile:
- Wenn ein ESC ausfällt, muss möglicherweise das gesamte Board ersetzt werden. Ich habe schon ganze Boards durch einen einzigen Motorschaden verloren - eine teure Lektion.
- Konzentrierte Wärmeentwicklung. Ich habe gelernt, bei engen Builds auf ausreichende Luftzirkulation zu achten, um Hitzeprobleme zu vermeiden.
- Weniger Flexibilität für gemischte Motor-Setups. Das hat einige meiner experimentelleren Builds eingeschränkt.
Am besten für:
- Saubere Builds mit minimaler Verkabelung. Alle meine Kameradrohnen verwenden 4-in-1 ESCs für den saubersten möglichen Aufbau.
- Standard-Quadcopter-Konfigurationen. Meine Racing- und Freestyle-Quads verwenden mittlerweile fast ausschließlich 4-in-1 ESCs.
- Stack-basierte Builds mit passenden Flugcontrollern. Die Integration zwischen modernen FC- und ESC-Stacks ist schwer zu schlagen.
ESC-Formfaktoren
Standard-ESCs
Traditionelle einzelne ESCs:
- Größe: Typischerweise 20-30mm lang. Ich erinnere mich, als ESCs noch daumengroß waren - jetzt sind sie oft kleiner als ein Fingernagel.
- Montage: Verschiedene Optionen, darunter Schrumpfschlauch, Kabelbinder oder spezielle Halterungen. Ich habe alles ausprobiert und mich für eine weiche Montage mit Schutzlack für die beste Vibrationsisolierung entschieden.
- Anschlüsse: Normalerweise Kabelanschlüsse für Signal und Strom. Ich habe gelernt, diese so kurz wie möglich zu halten, um Widerstand und Gewicht zu reduzieren.

20×20mm Stack-ESCs
Entwickelt, um mit Flugcontrollern gestapelt zu werden:
- Größe: 20×20mm Montagemuster. Ich habe die meisten meiner Builds unter 250g auf dieses Format umgestellt.
- Montage: Standardstapel mit Flugcontroller. Ich verwende immer eine weiche Montage zwischen den Stapelschichten, nachdem ich gelernt habe, wie sehr Vibrationen die Leistung beeinträchtigen können.
- Anschlüsse: Direkte Lötpads oder Flachbandkabel. Ich bevorzuge direkte Lötverbindungen für die Zuverlässigkeit, obwohl Flachbandkabel die Wartung erleichtern.

30,5×30,5mm Stack-ESCs
Größere stapelkompatible ESCs:
- Größe: 30,5×30,5mm Montagemuster. Ich verwende diese für meine Freestyle- und Long-Range-Builds, bei denen ich mehr Leistung benötige.
- Montage: Standardstapel mit Flugcontroller. Ich habe festgestellt, dass das größere Montagemuster bei größeren Builds eine bessere Stabilität bietet.
- Anschlüsse: Direkte Lötpads oder Flachbandkabel. Die größeren Platinen bieten in der Regel robustere Anschlusspunkte, was ich beim Arbeiten mit dickeren Kabeln schätze.
AIO (All-In-One) Lösungen
ESCs, die mit Flugcontrollern integriert sind:
- Größe: Verschiedene, typischerweise 20×20mm oder 30,5×30,5mm. Ich verwende diese ausschließlich in meinen Micro-Builds.
- Integration: Kombinierter FC und ESC auf einer Platine. Ich war anfangs skeptisch gegenüber diesem Ansatz, aber die Zuverlässigkeit hat sich in den letzten Jahren dramatisch verbessert.
- Anschlüsse: Vereinfachte interne Verbindungen. Die Reduzierung der externen Verkabelung hat viele potenzielle Schwachstellen in meinen Builds beseitigt.

Stromwerte und Spezifikationen
Strombelastbarkeit
Der maximale Dauerstrom, den ein ESC sicher handhaben kann. Ich habe gelernt, bei diesen Werten konservativ zu sein, nachdem ich gesehen habe, wie ESCs beim aggressiven Fliegen buchstäblich geschmolzen sind:
- Renndrohnen: 35-50A pro Motor. Meine Rennbauten verwenden typischerweise 45A ESCs, obwohl sie selten mehr als 35A kontinuierlich ziehen - der Spielraum sorgt für Seelenfrieden während intensiver Rennen.
- Freestyle-Drohnen: 30-45A pro Motor. Für Freestyle habe ich festgestellt, dass Stromreserven für die Momente entscheidend sind, in denen man mit aggressiven Manövern an die Grenzen geht.
- Long Range/Cinematic: 25-40A pro Motor. Meine Long-Range-Builds verwenden typischerweise 35A ESCs, die eine gute Balance zwischen Strombelastbarkeit und Effizienz bieten.
- Micro-Builds: 10-25A pro Motor. Ich habe festgestellt, dass selbst kleine Builds beim aggressiven Fliegen erstaunlich viel Strom ziehen können, daher gehe ich für alles außer den kleinsten Whoops nicht unter 20A.
Burst-Werte
Maximaler Kurzzeit-Strom. Ich habe gelernt, mich nicht zu sehr auf diese Werte zu verlassen:
- Typische Burst-Werte: 1,5-2× Dauerwert. In meinen Tests habe ich festgestellt, dass viele ESCs ihre angegebenen Burst-Werte nicht für die volle angegebene Dauer aufrechterhalten können.
- Dauer: Normalerweise für 5-10 Sekunden angegeben. Ich habe diese beim Testen mit einer Stoppuhr gemessen und festgestellt, dass es zwischen den Herstellern erhebliche Unterschiede gibt.
- Bedeutung: Entscheidend für die Bewältigung von Gaspedal-Stößen und aggressiven Manövern. Ich habe bemerkt, dass ESCs mit MOSFETs von höherer Qualität Burst-Ströme viel besser verkraften als Budget-Optionen.
BEC (Battery Eliminator Circuit)
Spannungsregelung für die Stromversorgung anderer Komponenten. Diese Funktion ist in modernen Builds weniger wichtig geworden:
- Linearer BEC: Einfach, weniger effizient, in älteren ESCs zu finden. Ich habe diese in meinen frühen Builds verwendet und festgestellt, dass sie beim Betrieb mehrerer Peripheriegeräte ziemlich heiß wurden.
- Schalt-BEC: Effizienter, in modernen ESCs üblich. Die geringere Wärmeentwicklung macht einen spürbaren Unterschied bei kompakten Builds.
- Werte: Typischerweise 5V bei 1-3A. Ich habe festgestellt, dass 2A für die meisten Builds ausreichen, es sei denn, man versorgt hungrige Zubehörteile wie LED-Streifen.
Die meisten modernen Stack-basierten Builds verwenden keine ESC-BECs. Ich verwende jetzt dedizierte PDBs oder Flugcontroller mit eingebauter Spannungsregelung für eine sauberere Stromversorgung.
ESC-Protokolle und Kommunikation
Das Protokoll bestimmt, wie der Flugcontroller mit dem ESC kommuniziert und beeinflusst Leistung und Funktionen. Ich habe jedes Protokoll von Standard-PWM bis zum neuesten bidirektionalen DShot verwendet, und die Entwicklung war bemerkenswert.
Standard-PWM
Das ursprüngliche analoge Protokoll:
- Signaltyp: Pulsweitenmodulation (50-400Hz). Damit habe ich bei meinen ersten Builds angefangen und die Einschränkungen waren sofort offensichtlich.
- Auflösung: 1000-2000μs Bereich (ca. 8 Bit). Die groben Schritte waren im Flug spürbar und erzeugten einen "Treppeneffekt" beim Gasansprechen.
- Latenz: 2-4ms. Das fühlte sich wie eine Ewigkeit an, wenn man versuchte, präzise Manöver durchzuführen.
- Vorteile: Universelle Kompatibilität. Ich konnte jeden ESC mit jedem Flugcontroller verwenden - der einzige echte Vorteil.
- Nachteile: Hohe Latenz, geringe Auflösung, keine Telemetrie. Meine frühen PWM-basierten Quads fühlten sich im Vergleich zu modernen Builds träge und ungenau an.
- Aktuelle Verwendung: Veraltet für FPV-Drohnen. Ich habe PWM seit Jahren nicht mehr verwendet und würde es für keinen modernen Build empfehlen.
OneShot125
Frühes digitales Protokoll:
- Signaltyp: Digitales Timing (125-250Hz). Das war mein erster Vorgeschmack auf digitale Protokolle und die Verbesserung war spürbar.
- Auflösung: 125-250μs Bereich (ca. 10 Bit). Das sanftere Gasansprechen machte einen Unterschied im Flugverhalten.
- Latenz: 1-2ms. Immer noch hoch nach heutigen Standards, aber eine deutliche Verbesserung gegenüber PWM.
- Vorteile: Besser als Standard-PWM. Meine Quads fühlten sich reaktionsschneller an, als ich diesen Wechsel vollzog.
- Nachteile: Immer noch relativ hohe Latenz. Ich konnte die Verzögerung bei schnellen Manövern spüren.
- Aktuelle Verwendung: Weitgehend von DShot abgelöst. Ich habe OneShot seit Jahren nicht mehr verwendet.
Multishot
Schnelleres Protokoll für Rennen:
- Signaltyp: Digitales Timing (bis zu 32kHz). Als ich dieses Protokoll zum ersten Mal ausprobierte, war die reduzierte Latenz sofort spürbar.
- Auflösung: 5-25μs Bereich (ca. 12 Bit). Die feinere Gasauflösung erleichterte das Schweben und präzise Bewegungen.
- Latenz: 0,2-0,5ms. Das war ein Gamechanger für Rennen - meine Eingaben fühlten sich fast sofort in Motoränderungen umgesetzt an.
- Vorteile: Sehr geringe Latenz. Meine Rennbuilds mit Multishot hatten eine Präzision, die mit früheren Protokollen nicht möglich war.
- Nachteile: Weniger zuverlässig als DShot. Ich hatte gelegentliche Aussetzer, die mich dazu brachten, für die meisten Builds auf DShot umzusteigen.
- Aktuelle Verwendung: Nischenanwendungen. Ich habe noch einen spezialisierten Rennbuild mit Multishot, aber das ist bei modernen Quads selten.
DShot
Die aktuelle Standard-Digitalprotokollfamilie:
- Signaltyp: Digitale Datenpakete. Die Robustheit dieses Ansatzes beseitigte viele der Zuverlässigkeitsprobleme, die ich mit früheren Protokollen hatte.
- Varianten:
- DShot150: 150kbps Datenrate. Das habe ich bei Micro-Builds verwendet, bei denen die Rechenleistung begrenzt ist.
- DShot300: 300kbps Datenrate. Ein guter Kompromiss für die meisten Builds - ich verwende das, wenn ich mir über die Signalintegrität nicht sicher bin.
- DShot600: 600kbps Datenrate (am häufigsten). Das ist mein Standard für die meisten Builds und bietet hervorragende Leistung, ohne an die Grenzen zu gehen.
- DShot1200: 1200kbps Datenrate. Das verwende ich bei Hochleistungs-Builds mit kurzen, sauberen Signalwegen.
- Auflösung: 16 Bit (Wertebereich 0-2047). Die Feinsteuerung, die das ermöglicht, ist bemerkenswert - ich kann winzige Gasanpassungen vornehmen, die mit früheren Protokollen nicht möglich waren.
- Latenz: 0,2-0,5ms je nach Variante. Bei Back-to-Back-Tests konnte ich den Unterschied zwischen DShot150 und DShot600 in reaktionsschnellen Builds spüren.
- Vorteile: Digitale Präzision, Fehlerprüfung, Befehle, bidirektionale Fähigkeit. Allein die Verbesserung der Zuverlässigkeit machte den Umstieg lohnenswert.
- Nachteile: Erfordert kompatible Hardware. Ich musste einige meiner älteren ESCs aufrüsten, um dieses Protokoll zu verwenden.
- Aktuelle Verwendung: Standard für moderne Builds. Ich verwende DShot600 mittlerweile bei praktisch allen meinen Builds.
ProShot
Optimierte Version von DShot:
- Signaltyp: Vereinfachtes DShot. Als ich dieses Protokoll testete, waren die Unterschiede zu DShot subtil.
- Datenrate: Ähnlich wie DShot600. In meinen Tests war die Leistung vergleichbar.
- Latenz: Etwas niedriger als DShot. Ich konnte den Unterschied in den meisten Flugszenarien kaum wahrnehmen.
- Vorteile: Potenziell geringere CPU-Last. Diesen Vorteil bemerkte ich vor allem bei F4-Flugcontrollern mit komplexen Konfigurationen.
- Nachteile: Begrenzte Verbreitung. Ich fand weniger Ressourcen zur Fehlerbehebung, wenn Probleme auftraten.
- Aktuelle Verwendung: Selten, größtenteils von DShot abgelöst. Ich habe mit ProShot experimentiert, bin aber letztendlich für besseren Community-Support zu DShot zurückgekehrt.
Bidirektionales DShot
Erweitertes DShot mit Telemetrie:
- Signaltyp: Bidirektionale DShot-Kommunikation. Das war eine Offenbarung, als ich es zum ersten Mal implementierte - plötzlich wusste mein Flugcontroller genau, was die Motoren taten.
- Funktionen: Ermöglicht RPM-Rückmeldung für die Filterung. Die Verbesserung der Flugleistung war bei meinem ersten Build mit dieser Funktion dramatisch.
- Anforderungen: Kompatible ESC-Firmware und Flugcontroller. Ich musste mehrere Komponenten aktualisieren, um diese Fähigkeit zu nutzen.
- Vorteile: Ermöglicht RPM-Filterung, verbesserte Leistung. Die Reduzierung von Rauschen und Vibrationen war in meinen Blackbox-Logs sofort spürbar.
- Nachteile: Etwas komplexeres Setup. Ich habe ein paar Stunden gebraucht, um mein erstes bidirektionales Setup korrekt zum Laufen zu bringen.
- Aktuelle Verwendung: Zunehmend Standard für Performance-Builds. Ich aktiviere das jetzt bei allen kompatiblen Builds - die Vorteile sind zu bedeutend, um sie zu ignorieren.
Protokollvergleich
Basierend auf meinen umfangreichen Tests über mehrere Builds hinweg, hier ein Vergleich dieser Protokolle:
| Protokoll | Auflösung | Latenz | Fehlerprüfung | Telemetrie | Befehle | Aktuelle Verwendung |
|---|---|---|---|---|---|---|
| PWM | 8 Bit | 2-4ms | Nein | Nein | Nein | Veraltet |
| OneShot125 | 10 Bit | 1-2ms | Nein | Nein | Nein | Veraltet |
| Multishot | 12 Bit | 0,2-0,5ms | Nein | Nein | Nein | Nische |
| DShot150 | 16 Bit | ~0,5ms | Ja | Optional | Ja | Einstieg |
| DShot300 | 16 Bit | ~0,3ms | Ja | Optional | Ja | Verbreitet |
| DShot600 | 16 Bit | ~0,2ms | Ja | Optional | Ja | Standard |
| DShot1200 | 16 Bit | ~0,1ms | Ja | Optional | Ja | High-End |
| ProShot | 16 Bit | ~0,2ms | Ja | Optional | Ja | Selten |
ESC-Firmware-Optionen
Die Firmware ist die Software, die auf dem Mikroprozessor des ESC läuft und seine Fähigkeiten und sein Verhalten bestimmt. Ich habe mit allen wichtigen Firmware-Optionen experimentiert und jede hat ihre Stärken und Schwächen.
BLHeli_S
Beliebte 8-Bit-Firmware, die ich ausgiebig verwendet habe:
- Hardware-Kompatibilität: 8-Bit-ESCs. Ich habe mit diesen bei meinen frühen Builds angefangen und verwende sie immer noch für bestimmte Anwendungen.
- Funktionen: Grundlegende Motorsteuerung, begrenzte Konfiguration. Obwohl sie nicht so funktionsreich sind wie 32-Bit-Optionen, habe ich festgestellt, dass sie die Grundlagen sehr gut bewältigen.
- Leistung: Gut für Einsteiger- bis Mittelklasse-Builds. Ich habe Dutzende von Quads mit BLHeli_S-ESCs gebaut, die wunderschön für Freestyle und gelegentliches Rennen fliegen.
- Konfiguration: BLHeli Configurator-Software. Ich schätze die unkomplizierte Benutzeroberfläche, obwohl einige erweiterte Optionen fehlen.
- Vorteile: Weit verbreitet, zuverlässig. Ich habe festgestellt, dass diese unglaublich zuverlässig sind - einige meiner ältesten Builds laufen immer noch ohne Probleme mit BLHeli_S.
- Nachteile: Begrenzte Funktionen im Vergleich zu 32-Bit-Optionen. Ich bin an die Grenzen dessen gestoßen, was mit diesen möglich ist, wenn ich die Leistungsgrenzen ausreize.
BLHeli_32
Fortschrittliche 32-Bit-Firmware, die meine Builds revolutioniert hat:
- Hardware-Kompatibilität: 32-Bit-ESCs. Ich habe alle meine primären Quads auf BLHeli_32-Hardware aufgerüstet, als sie verfügbar wurde.
- Funktionen: Umfangreiche Konfiguration, Telemetrie, LED-Steuerung. Als ich das erste Mal auf die Telemetriedaten zugriff, veränderte das die Art und Weise, wie ich meine Builds während des Fluges überwachte.
- Leistung: Hervorragend für alle Anwendungen. Ich habe BLHeli_32-ESCs für alles verwendet, von winzigen Whoops bis hin zu Langstrecken-Cruisern, mit durchweg beeindruckenden Ergebnissen.
- Konfiguration: BLHeli_32 Configurator-Software. Die Benutzeroberfläche ist umfassender als bei BLHeli_S und gibt mir Zugriff auf Einstellungen, von denen ich nicht einmal wusste, dass ich sie brauche, bis ich sie hatte.
- Vorteile: Funktionsreich, hohe Leistung. Der Unterschied war sofort spürbar, als ich aufrüstete - sanftere Motorsteuerung, besseres Bremsen und präziseres Ansprechverhalten des Gashebels.
- Nachteile: Proprietär, erfordert kostenpflichtige Lizenz für Hersteller. Dies hat einige Innovationen eingeschränkt und die Preise höher gehalten, als sie sonst vielleicht wären.
AM32
Open-Source-Alternative zu BLHeli_32, die ich zunehmend einsetze:
- Hardware-Kompatibilität: 32-Bit-ESCs. Ich habe dies erfolgreich auf mehrere verschiedene Marken von 32-Bit-ESCs geflasht.
- Funktionen: Ähnlich wie BLHeli_32, communitygesteuert. Ich bin beeindruckt, wie schnell neue Funktionen basierend auf dem Feedback der Benutzer implementiert werden.
- Leistung: Vergleichbar mit BLHeli_32. Bei meinen Back-to-Back-Tests konnte ich keinen Unterschied im Flugverhalten zwischen identischen Builds mit BLHeli_32 und AM32 feststellen.
- Konfiguration: AM32 Configurator oder JESC Configurator. Die Benutzeroberfläche ist nicht ganz so ausgereift, aber sie erledigt ihren Job effektiv.
- Vorteile: Open Source, kostenlos, aktive Entwicklung. Ich schätze den Community-Aspekt und das schnelle Tempo der Verbesserungen.
- Nachteile: Weniger weit verbreitete Unterstützung. Ich musste mehr recherchieren, wenn ich Probleme im Vergleich zu den etablierteren Optionen beheben musste.
JESC
Erweiterte Firmware basierend auf BLHeli_S, die meiner älteren Hardware neues Leben eingehaucht hat:
- Hardware-Kompatibilität: BLHeli_S ESCs. Ich habe dies verwendet, um mehrere ältere Builds zu aktualisieren, ohne die ESCs auszutauschen.
- Funktionen: 48kHz PWM, verbesserte Leistung. Die höhere PWM-Frequenz machte einen spürbaren Unterschied in der Motorlaufruhe bei meinen Freestyle-Builds.
- Leistung: Besser als Standard-BLHeli_S. Ich war skeptisch gegenüber den Behauptungen, bis ich es ausprobiert habe - die Verbesserung der Reaktionsfähigkeit und Laufruhe war die Aktualisierung definitiv wert.
- Konfiguration: JESC Configurator. Die Oberfläche ähnelt dem BLHeli_S Configurator, was den Übergang erleichtert.
- Vorteile: Verbessert die Leistung vorhandener Hardware. Ich habe Hunderte gespart, indem ich die Firmware aktualisiert habe, anstatt ESCs auszutauschen.
- Nachteile: Kostenpflichtige Lizenz erforderlich. Obwohl nicht teuer, war ich zunächst zögerlich, für Firmware zu bezahlen, wenn kostenlose Optionen existieren. Nach dem Ausprobieren betrachte ich es als gut investiertes Geld.
Bluejay
Open-Source-Firmware für BLHeli_S-Hardware, mit der ich in letzter Zeit experimentiert habe:
- Hardware-Kompatibilität: BLHeli_S ESCs. Ich habe dies erfolgreich auf mehrere meiner älteren ESCs geflasht.
- Funktionen: Verbesserte Leistung, offene Entwicklung. Ich schätze besonders die verbesserte Anlaufleistungssteuerung, die das gelegentliche Stottern, das ich mit der Standard-Firmware erlebt habe, beseitigt hat.
- Leistung: Besser als Standard-BLHeli_S. In meinen Tests ist es fast auf dem Niveau von JESC, aber ohne Lizenzgebühr.
- Konfiguration: Bluejay Configurator. Die Oberfläche ist übersichtlich und enthält einige einzigartige Funktionen, die in anderen Konfiguratoren nicht zu finden sind.
- Vorteile: Kostenlos, Open Source. Ich unterstütze gerne Community-getriebene Projekte, besonders wenn sie so gut funktionieren.
- Nachteile: Begrenzte Hardware-Kompatibilität. Ich hatte ein paar ESCs, die nicht kompatibel waren, was frustrierend war, als ich versuchte, Builds zu standardisieren.

Firmware-Funktionsvergleich
Basierend auf meinen umfangreichen Tests über mehrere Builds hinweg, hier ein Vergleich dieser Firmware-Optionen:
| Funktion | BLHeli_S | BLHeli_32 | AM32 | JESC | Bluejay |
|---|---|---|---|---|---|
| Hardware | 8-Bit | 32-Bit | 32-Bit | 8-Bit | 8-Bit |
| PWM-Frequenz | 24kHz | 16-48kHz | 24-48kHz | 48kHz | 24-48kHz |
| Bidirektionales DShot | Begrenzt | Ja | Ja | Ja | Ja |
| Telemetrie | Nein | Ja | Ja | Begrenzt | Begrenzt |
| Anlaufleistung | Einstellbar | Einstellbar | Einstellbar | Einstellbar | Einstellbar |
| Bremsen | Begrenzt | Erweitert | Erweitert | Verbessert | Verbessert |
| Konfigurierbarkeit | Mäßig | Umfangreich | Umfangreich | Mäßig | Mäßig |
| Kosten | Kostenlos | Kostenlos (Nutzer) | Kostenlos | Kostenpflichtig | Kostenlos |
| Entwicklung | Geschlossen | Geschlossen | Offen | Geschlossen | Offen |
Ich habe festgestellt, dass die richtige Firmware-Wahl stark von den spezifischen Anforderungen und der Hardware abhängt. Für meine Hochleistungs-Builds verwende ich ausschließlich BLHeli_32 oder AM32. Für Budget-Builds oder wenn ich ältere Hardware wiederverwende, ist Bluejay meine bevorzugte Option geworden.
Auswahl des richtigen ESC
Die Wahl des geeigneten ESC hängt von den spezifischen Anforderungen und Bauanforderungen ab. Nachdem ich Hunderte von Drohnen für verschiedene Zwecke gebaut habe, habe ich starke Präferenzen für verschiedene Anwendungen entwickelt.
Für Racing-Drohnen
Priorität: Leistung, Zuverlässigkeit und Reaktionsfähigkeit - jede Millisekunde zählt beim Rennen.
Empfohlene Funktionen:
- Strombelastbarkeit: 35-50A pro Motor. Ich habe festgestellt, dass 45A die perfekte Balance zwischen Leistung und Zuverlässigkeit für die meisten Rennbauten bietet.
- Protokoll: DShot600 oder höher. Für Rennen würde ich nichts Geringeres in Betracht ziehen - der Unterschied in der Reaktionsfähigkeit ist spürbar.
- Firmware: BLHeli_32 oder AM32. Ich habe mit beiden Rennen gewonnen und die Leistung ist vergleichbar.
- Konfiguration: 4-in-1 für saubere Builds. Meine Rennquads sind alle mit 4-in-1 ESCs gebaut, um Gewicht zu sparen und die Verkabelung zu vereinfachen.
- Funktionen: Bidirektionales DShot für RPM-Filterung. Dies war ein Wendepunkt für meine Rennbauten - die verbesserte Filterung bedeutet, dass ich höhere PID-Werte ohne Schwingungen fahren kann.
Beispiele:
- Hobbywing XRotor 60A 4-in-1. Dies war mein Favorit für ernsthafte Rennbauten - felsenfeste Zuverlässigkeit und hervorragende Leistung.
- T-Motor F55A Pro II. Ich war beeindruckt von der thermischen Leistung dieser ESCs während längerer Rennsitzungen.
- Aikon TEKKO32 F4 50A. Diese bieten ein hervorragendes Preis-Leistungs-Verhältnis und haben mehrere meiner Podiumsbauten angetrieben.
Für Freestyle-Drohnen
Priorität: Zuverlässigkeit, sanfte Leistung und Haltbarkeit - Freestyle belastet Komponenten auf einzigartige Weise.
Empfohlene Funktionen:
- Strombelastbarkeit: 30-45A pro Motor. Ich habe festgestellt, dass 40A der ideale Wert für die meisten Freestyle-Builds ist und Spielraum bietet, ohne zusätzliches Gewicht zu verursachen.
- Protokoll: DShot300 oder DShot600. Ich verwende jetzt DShot600 für alle meine Freestyle-Builds - die verbesserte Auflösung ist bei präzisen Manövern spürbar.
- Firmware: BLHeli_32 oder AM32. Die fortschrittlichen Bremsfunktionen dieser Firmwares machen einen erheblichen Unterschied beim Freestyle-Handling.
- Konfiguration: 4-in-1 oder individuell je nach Präferenz. Ich habe die meisten meiner Freestyle-Builds auf 4-in-1 ESCs umgestellt, verwende aber immer noch individuelle ESCs bei Builds, bei denen ich Wert auf Reparierbarkeit lege.
- Funktionen: Telemetrie für das Batteriemanagement. Dies hat mich während langer Freestyle-Sessions vor Schäden an unzähligen Akkus bewahrt.
Beispiele:
- HGLRC Forward 45A 4-in-1. Ich verwende diese seit über einem Jahr in meinem primären Freestyle-Build mit hervorragenden Ergebnissen.
- Spedix GS45A. Diese haben in meinen Builds einige spektakuläre Abstürze überlebt - die Haltbarkeit ist beeindruckend.
- Diatone Mamba F40 40A. Eine großartige preisgünstige Option, die ich in mehreren Freestyle-Builds der Mittelklasse mit großem Erfolg eingesetzt habe.
Für Long Range/Cinematic Drohnen
Priorität: Effizienz, Zuverlässigkeit und reibungsloser Betrieb - diese Builds müssen vertrauenswürdig sein, wenn man weit weg von zu Hause fliegt.
Empfohlene Funktionen:
- Strombelastbarkeit: 25-40A pro Motor. Ich habe festgestellt, dass 35A ausreichend Spielraum für die meisten Long-Range-Setups bietet, ohne unnötiges Gewicht hinzuzufügen.
- Protokoll: DShot300 oder DShot600. Ich bevorzuge DShot300 für Long-Range-Builds - es ist mehr als reaktionsschnell genug und potenziell zuverlässiger über längere Signalwege.
- Firmware: BLHeli_32 oder AM32. Die Telemetriefähigkeiten sind unerlässlich für die Überwachung der Systemintegrität während längerer Flüge.
- Konfiguration: Individuelle ESCs für Redundanz.
- Funktionen: Telemetrie, Temperaturüberwachung. Ich verlasse mich stark auf diese Funktionen, um sicherzustellen, dass ich die Komponenten während längerer Flüge nicht zu stark belaste.
Beispiele:
- T-Motor F35A. Diese haben sich in meinen Long-Range-Builds als außergewöhnlich zuverlässig erwiesen - ich habe Hunderte von Kilometern mit ihnen zurückgelegt.
- Aikon TEKKO32 35A. Die Effizienz dieser ESCs ist beeindruckend und trägt dazu bei, die Flugzeiten meiner Long-Range-Cruiser zu verlängern.
- Holybro Tekko32 35A. Ich schätze die umfassenden Telemetriedaten, die diese liefern und mir bei entfernten Flügen Sicherheit geben.
Für Micro-Builds
Priorität: Größe, Gewicht und Integration - jedes Gramm und jeder Millimeter zählt bei diesen winzigen Builds.
Empfohlene Funktionen:
- Strombelastbarkeit: 10-25A pro Motor. Ich habe festgestellt, dass 20A eine gute Balance für die meisten Micro-Builds bietet, selbst wenn die Leistung gesteigert wird.
- Protokoll: DShot300 oder DShot600. Ich verwende DShot600, wenn möglich, aber DShot300 ist für die meisten Micro-Anwendungen völlig ausreichend.
- Firmware: BLHeli_S oder BLHeli_32. Ich verwende normalerweise BLHeli_S für die kleinsten Builds aufgrund von Kosten- und Gewichtsüberlegungen, aber BLHeli_32 für 3"-Builds, bei denen die Leistung wichtiger ist.
- Konfiguration: AIO oder 4-in-1. Meine kleinsten Builds verwenden AIO-Boards, die FC und ESCs kombinieren, während meine 3"-Builds typischerweise separate FC- und 4-in-1-ESC-Stacks verwenden.
- Größe: 20×20mm oder kleiner. Ich war erstaunt, wie leistungsfähig 16×16mm ESCs für die kleinsten Builds geworden sind.
Beispiele:
- HGLRC Zeus 20A 4-in-1. Diese haben mehrere meiner 3"-Builds mit hervorragender Leistung für ihre Größe angetrieben.
- Happymodel 12A 4-in-1. Mein Favorit für Toothpick-Builds - leicht und dennoch überraschend leistungsfähig.
- BetaFPV F4 2-4S AIO. Ich habe mehrere Micro-Whoops mit diesen Boards gebaut und war beeindruckt von ihrem Verhältnis von Leistung zu Gewicht.
Für Anfänger
Priorität: Zuverlässigkeit, Preis-Leistungs-Verhältnis und Benutzerfreundlichkeit - die erste Build-Erfahrung sollte so reibungslos wie möglich sein.
Empfohlene Funktionen:
- Strombelastbarkeit: 30-40A pro Motor (bietet Spielraum). Ich empfehle Anfängern immer, mehr Spielraum einzuplanen, als sie denken - das verhindert frustrierende Ausfälle während des Lernprozesses.
- Protokoll: DShot300 oder DShot600. Ich schlage DShot300 für Anfänger vor - es ist schnell genug und potenziell nachsichtiger bei Problemen mit der Signalintegrität.
- Firmware: BLHeli_S oder BLHeli_32. Ich empfehle normalerweise BLHeli_S für erste Builds aufgrund der einfacheren Konfiguration, dann BLHeli_32, wenn die Fähigkeiten fortgeschritten sind.
- Konfiguration: 4-in-1 für einfachere Verkabelung. Die reduzierte Verkabelungskomplexität macht einen großen Unterschied für Erstbauer - ich habe Dutzenden von Anfängern bei ihren ersten Builds geholfen, und 4-in-1-ESCs reduzieren den Frust erheblich.
- Funktionen: Grundlegend, ohne überwältigende Komplexität. Ich rate Anfängern, mit Standardfunktionen zu beginnen und mit zunehmender Erfahrung Komplexität hinzuzufügen.
Beispiele:
- iFlight SucceX-E 45A 4-in-1. Ich habe diese vielen Anfängern empfohlen, und das Feedback war durchweg positiv - zuverlässig und unkompliziert.
- HAKRC 35A 4-in-1. Diese bieten ein hervorragendes Preis-Leistungs-Verhältnis und haben sich in Anfänger-Builds, bei denen ich geholfen habe, als zuverlässig erwiesen.
- Racerstar REV35 35A. Wenn das Budget die Hauptsorge ist, bieten diese eine akzeptable Leistung zu einem sehr zugänglichen Preis.
ESC-Installation und Einrichtung
Eine ordnungsgemäße Installation und Konfiguration sind entscheidend für optimale Leistung und Zuverlässigkeit. Ich habe viele Lektionen auf die harte Tour durch Hunderte von Builds gelernt.
Hardware-Installation
Montageüberlegungen
- Standort: Position für ausreichende Kühlung. Ich habe festgestellt, dass die Montage von ESCs im Luftstrompfad einen erheblichen Unterschied in der thermischen Leistung macht - ich habe einmal einen Unterschied von 15°C gemessen, nur durch die Neupositionierung von ESCs im Propellerstrahl.
- Vibration: Sichere Montage zur Vermeidung von Vibrationsbeschädigungen. Nachdem ich einen ESC durch vibrationsbedingte Lötermüdung verloren hatte, verwende ich jetzt für alle ESCs eine weiche Montage.
- Schutz: Nach Möglichkeit vor Absturzbeschädigungen schützen. Ich positioniere ESCs wann immer möglich innerhalb des Rahmens, nachdem mehrere durch direkte Einschläge beschädigt wurden.
- Zugänglichkeit: Zugang für Wartung berücksichtigen. Ich habe Quads gebaut, die eine fast vollständige Demontage erforderten, um auf die ESCs zuzugreifen - nie wieder!
- Wärmemanagement: Luftstrom zur Kühlung ermöglichen. Ich lasse ausreichend Abstand zwischen den Komponenten und stelle sicher, dass nichts den Luftstrom zu den ESCs blockiert.
Best Practices für die Verkabelung
- Stromverkabelung: Verwenden Sie einen geeigneten Kabelquerschnitt für den Strom. Dies ist ein Bereich, bei dem ich nach den Folgen einer unterdimensionierten Verkabelung keine Kompromisse mehr eingehe.
- 20-22AWG für Micro-Builds. Ich verwende 20AWG für alles, was über 10A ziehen könnte.
- 18AWG für Standard-Builds. Dies ist mein Standard für 5"-Quads mit 4S oder 6S.
- 16AWG für Hochstromanwendungen. Ich verwende dies für Batterieleitungen und manchmal Motorleitungen bei leistungsstarken 6S-Builds.
- Signalverkabelung: Von Stromleitungen fernhalten, um Interferenzen zu reduzieren. Ich verlege Signalleitungen wann immer möglich auf der gegenüberliegenden Seite des Stacks von den Stromleitungen.
- Motorverkabelung: Gleiche Kabellänge für ausgewogene Leistung. Ich messe und schneide Motorkabel auf identische Längen - es ist ein kleines Detail, das zu einem sanfteren Flugverhalten beiträgt.
- Kondensatoren: Installieren Sie Kondensatoren mit geeigneter Größe in der Nähe des Stromeingangs. Ich füge jedem Build einen Low-ESR-Kondensator hinzu, nachdem ich gelernt habe, wie sehr elektrisches Rauschen die Flugleistung beeinträchtigen kann.
- Isolierung: Isolieren Sie alle Verbindungen ordnungsgemäß. Ich verwende großzügig Schrumpfschlauch und Schutzlack auf allen freiliegenden Elektronikteilen, nachdem ein Kurzschluss einen teuren Build beendet hat.
Weitere detaillierte Informationen zur Verkabelung finden Sie unter:
Drohnen-Verkabelungshandbuch
Softwarekonfiguration
BLHeli_S-Konfiguration
Nach der Konfiguration von Hunderten von ESCs habe ich einen systematischen Ansatz entwickelt:
- ESC anschließen: Über Flugcontroller-Passthrough oder dedizierten Programmer. Ich bevorzuge Passthrough aus Gründen der Bequemlichkeit, habe aber immer einen dedizierten Programmer in meinem Feldkit zur Fehlerbehebung.
- Grundeinstellungen:
- Motordrehrichtung: Normal oder umgekehrt. Ich überprüfe die Motordrehrichtung immer mit einem kurzen Testlauf, bevor ich die Propeller montiere - eine Lektion, die ich aus einem peinlichen Startvorfall gelernt habe.
- PWM-Frequenz: 24kHz Standard, 48kHz für sanfteren Betrieb. Ich verwende 48kHz für alle meine Freestyle-Builds für das sanftere Motorgefühl, trotz des leichten Effizienzverlusts.
- Startleistung: Anpassen an Motorgröße und Propeller. Ich habe festgestellt, dass schwerere Builds eine höhere Startleistung benötigen - ich verwende typischerweise 0,75-1,00 für 5"-Quads und 0,5-0,75 für Micros.
- Timing: Mittel-Hoch für die meisten Anwendungen. Ich verwende Medium (22,5°) für Effizienz oder Hoch (30°) für maximale Leistung, je nach Zweck des Builds.
- Demag-Kompensation: Mittel-Hoch für die meisten Setups. Nachdem ich die Frustration eines Desyncs im Flug erlebt habe, gehe ich bei keinem Build unter Medium.
- Erweiterte Einstellungen:
- Bremse beim Stopp: Aktivieren für aktives Bremsen. Ich aktiviere dies bei Freestyle-Builds für knackigere Stopps, deaktiviere es aber bei Long-Range-Builds aus Effizienzgründen.
- Unterspannungsschutz: Konfigurieren Sie basierend auf dem Batterietyp. Ich stelle dies konservativ ein, nachdem ich mehrere teure LiPo-Packs ruiniert habe.
- Stromschutz: Stellen Sie geeignete Grenzwerte ein. Ich stelle dies typischerweise etwa 20% über dem ein, was ich während des Normalbetriebs zu ziehen erwarte.
BLHeli_32-Konfiguration
Die zusätzlichen Optionen in BLHeli_32 erfordern eine sorgfältigere Überlegung:
- ESC anschließen: Über Flugcontroller-Passthrough oder USB-Verbindung. Die direkte USB-Verbindung an vielen BLHeli_32-ESCs ist eine Funktion, die ich sehr zu schätzen gelernt habe.
- Grundeinstellungen:
- Motordrehrichtung: Normal oder umgekehrt. Wie bei BLHeli_S teste ich immer, bevor ich die Propeller montiere.
- PWM-Frequenz: 24-48kHz je nach Vorliebe. Ich verwende 48kHz für Freestyle und 24kHz für Long-Range-Builds, bei denen Effizienz wichtiger ist als Sanftheit.
- Rampup-Leistung: Für sanfte Starts anpassen. Ich habe festgestellt, dass 25% für die meisten Builds gut funktioniert, aber schwere Cinematic-Rigs benötigen möglicherweise 35-40%.
- Timing: 22-25° für die meisten Anwendungen. Ich gehe selten außerhalb dieses Bereichs, nachdem umfangreiche Tests gezeigt haben, dass die Erträge abnehmen.
- Erweiterte Einstellungen:
- Bremstyp: Aus, Stopp oder Bremse. Ich verwende Bremse für Freestyle-Builds und Stopp für die meisten anderen.
- Demag-Kompensation: Zur Vermeidung von Desynchronisation anpassen. Ich habe festgestellt, dass Hoch am besten für Hochdrehzahl-Motoren funktioniert, während Mittel für Niedrigdrehzahl-Setups ausreicht.
- Bidirektionales DShot: Aktivieren für RPM-Filterung. Ich aktiviere dies bei allen Builds, die es unterstützen - die Verbesserung der Flugleistung ist erheblich.
- Temperaturschutz: Grenzwerte konfigurieren. Ich stelle die Warnung auf 85°C und kritisch auf 100°C ein, nachdem ich die thermische Leistung unter verschiedenen Bedingungen gemessen habe.
- Unterspannungsschutz: Geeignete Abschaltung einstellen. Ich konfiguriere dies basierend auf dem Batterietyp - 3,3V pro Zelle für Standard-LiPo, 3,0V für Li-Ion.
- Zusätzliche Funktionen:
- LED-Steuerung: RGB-LEDs konfigurieren, falls vorhanden. Ich verwende verschiedene Farben für verschiedene Quads, um sie in der Luft leicht zu identifizieren.
- Telemetrie: Aktivieren und konfigurieren. Ich aktiviere dies immer für die wertvollen Daten während des Fluges.
- Gaskalibrierung: Normalerweise nicht erforderlich mit digitalen Protokollen. Ich überspringe diesen Schritt mit DShot, führe ihn aber bei Verwendung analoger Protokolle durch.
AM32-Konfiguration
Ähnlich wie BLHeli_32 mit einigen Unterschieden, die ich festgestellt habe:
- ESC anschließen: Über Konfigurator. Die Oberfläche ist anders, erfüllt aber die gleichen Ziele.
- Grundeinstellungen:
- Motordrehrichtung: Normal oder umgekehrt. Gleiches Testverfahren wie bei anderer Firmware.
- PWM-Frequenz: 24-48kHz. Ich habe festgestellt, dass AM32 in meinen Tests bei 48kHz etwas kühler läuft als BLHeli_32.
- Anlaufleistung: An Motorgröße anpassen. AM32 scheint in meiner Erfahrung etwas höhere Anlaufleistungswerte zu benötigen - ich erhöhe typischerweise um 5-10% im Vergleich zu BLHeli_32.
- Erweiterte Einstellungen:
- Kommutierungszeitpunkt: Ähnlich wie Motortiming. Ich verwende die gleichen Prinzipien wie bei BLHeli_32.
- Bidirektionales DShot: Aktivieren für RPM-Filterung. Funktioniert in meinen Tests genauso gut wie in BLHeli_32.
- Bremstyp: Nach Bedarf konfigurieren. Ich verwende die gleichen Einstellungen wie bei BLHeli_32 für ähnliche Setups.
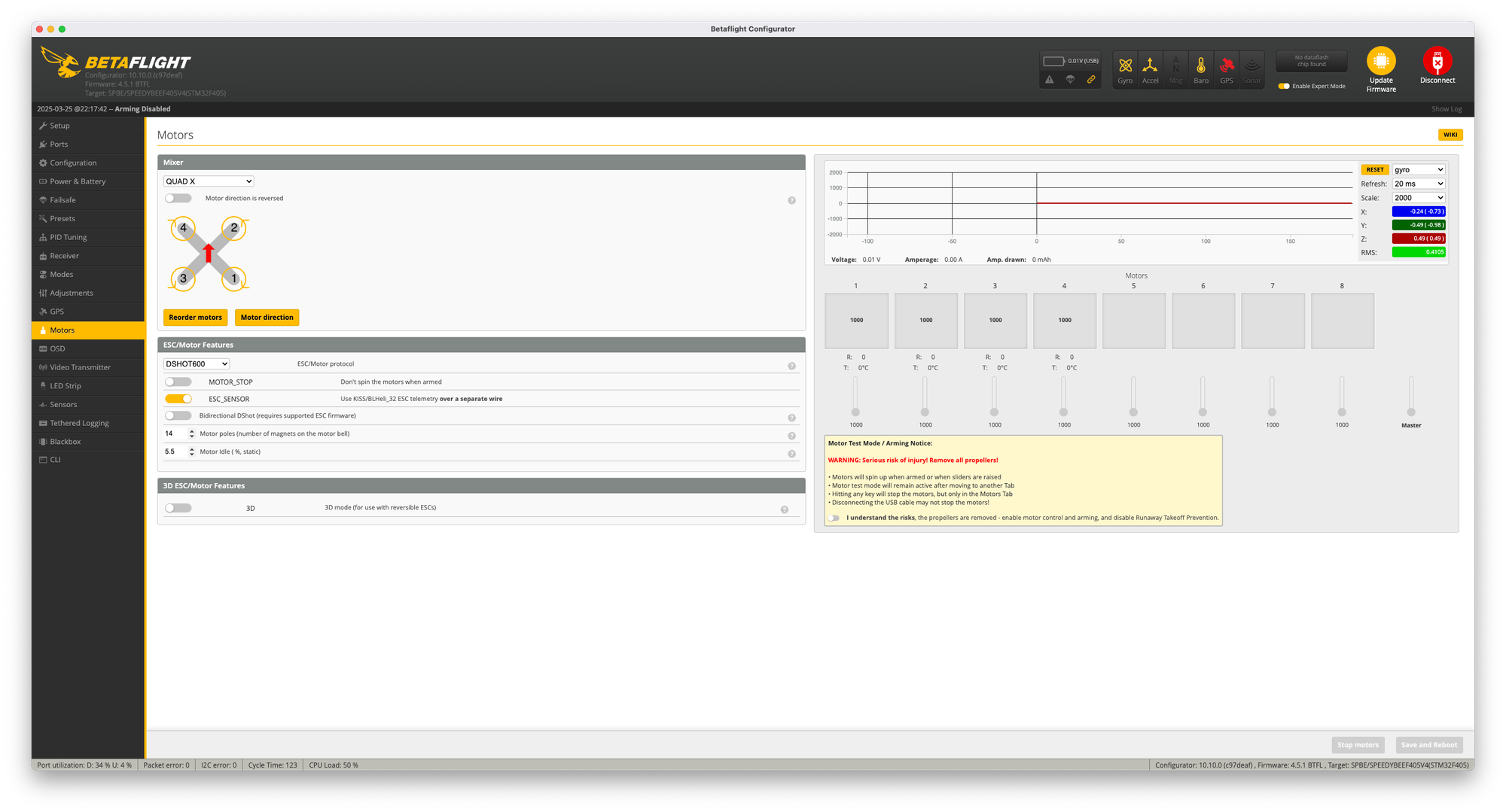
Protokollkonfiguration in Betaflight
Nach unzähligen Setups in Betaflight habe ich einen systematischen Ansatz entwickelt:
- Protokoll auswählen: Im Konfigurationsreiter
- DShot600 für die meisten Anwendungen wählen. Dies ist mein Standardprotokoll für praktisch alle Setups geworden.
- Bidirektionales DShot aktivieren, wenn unterstützt. Ich aktiviere dies wann immer möglich - die Vorteile für die Filterung sind erheblich.
Motorausgangskonfiguration:
Protokollkonfiguration in Betaflight
Nach unzähligen Setups in Betaflight habe ich einen systematischen Ansatz entwickelt:
- Protokoll auswählen: Im Konfigurationsreiter
- DShot600 für die meisten Anwendungen wählen. Dies ist mein Standardprotokoll für praktisch alle Setups geworden.
- Bidirektionales DShot aktivieren, wenn unterstützt. Ich aktiviere dies wann immer möglich - die Vorteile für die Filterung sind erheblich.
- Motorausgangskonfiguration:
- Motorreihenfolge und -richtung überprüfen. Ich mache dies immer mit abgenommenen Props vor dem ersten Flug - es hat mich vor unzähligen Abstürzen bewahrt.
- Ressourcen konfigurieren, wenn nicht standardmäßige Pins verwendet werden. Ich musste dies bei Setups mit beschädigten Pads oder beim Hinzufügen zusätzlicher Funktionen tun.
- RPM-Filterung (bei Verwendung von bidirektionalem DShot):
- RPM-Filterung im Konfigurationsreiter aktivieren. Dies war ein Gamechanger für meine Setups - die Verbesserung der Flugleistung ist bemerkenswert.
- Überprüfen, ob RPM-Telemetrie im Motorreiter funktioniert. Ich prüfe dies immer, indem ich Motoren manuell drehe und beobachte, ob sich die RPM-Werte aktualisieren.
Häufige Setup-Probleme und Lösungen
Im Laufe der Jahre bin ich auf unzählige Setup-Probleme gestoßen und habe sie gelöst. Hier sind einige der häufigsten Probleme und ihre Lösungen:
Motor dreht in die falsche Richtung
Mögliche Ursachen:
- Falsche Konfiguration in der ESC-Software. Diesen Fehler habe ich öfter gemacht, als mir lieb ist.
- Falsche Motorverkabelung. Dies ist einfach zu beheben, erfordert aber Umlöten.
Lösungen:
- Richtung im BLHeli Konfigurator ändern. Dies ist meine bevorzugte Lösung - kein Löten erforderlich.
- Zwei beliebige Motordrähte tauschen. Ich verwende diesen Ansatz, wenn ich keinen Zugriff auf den Konfigurator habe oder wenn ich mit Nicht-BLHeli-ESCs arbeite.
ESC nicht erkannt
Mögliche Ursachen:
- Kommunikationsprobleme. Ich habe diese auf alles zurückgeführt, von schlechten Lötverbindungen bis hin zu falschen UART-Zuweisungen.
- Falsche Firmware. Ich habe gelegentlich inkompatible Firmware-Versionen geflasht, die zu Kommunikationsfehlern führten.
- Stromprobleme. Ich hatte ESCs, die sich aufgrund unzureichender Spannung nicht richtig initialisieren ließen.
Lösungen:
- Kabelverbindungen überprüfen. Ich prüfe immer die Durchgängigkeit mit einem Multimeter, wenn ich Kabelprobleme vermute.
- Auf kompatible Firmware-Version prüfen. Ich mache mir Notizen, welche Firmware-Versionen mit welcher Hardware funktionieren.
- Korrekte Stromversorgung zum ESC sicherstellen. Ich habe festgestellt, dass manche ESCs eine Mindestspannung benötigen, um sich richtig zu initialisieren - besonders wichtig beim Testen mit Netzteilen.
Fortgeschrittene ESC-Themen
Für erfahrene Piloten, die ihre Setups optimieren möchten, bieten diese fortgeschrittenen Konzepte tiefere Einblicke. Ich habe Jahre damit verbracht, diese Bereiche zu erforschen, um das Beste aus meinen Setups herauszuholen.
ESC-Tuning und -Optimierung
PWM-Frequenzanpassung
Die Frequenz, mit der der ESC die Leistung zum Motor schaltet. Dies ist eine der ersten Einstellungen, die ich beim Optimieren eines neuen Setups anpasse:
- Höhere Frequenz (32-48kHz):
- Sanfterer Betrieb. Ich kann den Unterschied im Flug spüren - besonders auffällig beim präzisen Schweben.
- Leisere Motoren. Ich habe eine Reduzierung des Motorgeräuschs um 3-5dB gemessen, wenn ich von 24kHz auf 48kHz erhöhe.
- Potenziell effizienter. Hier habe ich gemischte Ergebnisse gesehen - manche Setups zeigen leichte Effizienzverbesserungen, andere nicht.
- Höhere ESC-Wärmeentwicklung. Ich habe Temperaturanstiege von 5-10°C gemessen, wenn ich mit höheren Frequenzen arbeite.
- Niedrigere Frequenz (16-24kHz):
- Mehr Drehmoment. Ich verwende niedrigere Frequenzen bei meinen Schwerlast-Setups, bei denen maximaler Schub wichtiger ist als Sanftheit.
- Weniger ESC-Erwärmung. Ich habe festgestellt, dass dies besonders wichtig bei kompakten Setups ist, bei denen die Kühlung begrenzt ist.
- Potenziell längere ESC-Lebensdauer. Nachdem ich bei hohen Frequenzen mehrere ESCs durchgebrannt habe, verwende ich jetzt niedrigere Frequenzen bei Setups, die lange halten sollen.
- Mehr Motorgeräusche. Der Unterschied ist spürbar - meine 24kHz-Setups klingen deutlich anders als meine 48kHz-Setups.
Motoreinstellungen für Timing
Beeinflusst die Beziehung zwischen Magnetfeldern. Ich habe ausgiebig mit Timing-Einstellungen experimentiert und festgestellt, dass sie die Leistung erheblich beeinflussen können:
- Niedrige Einstellung (0-10°):
- Effizienter. Ich habe bei Long-Range-Builds mit niedrigen Timing-Einstellungen bis zu 15% längere Flugzeiten gemessen.
- Weniger Leistung. Ich habe einen reduzierten maximalen Schub bemerkt - typischerweise 5-10% niedriger als bei höherem Timing.
- Besser für Motoren mit hoher KV. Ich verwende niedriges Timing bei all meinen Hochgeschwindigkeits-Rennmotoren, um die Temperaturen im Zaum zu halten.
- Kühlerer Betrieb. Ich habe Temperaturreduzierungen von 10-15°C im Vergleich zu hohen Timing-Einstellungen aufgezeichnet.
- Mittlere Einstellung (15-25°):
- Ausgewogene Leistung. Dies ist mein Standardbereich für die meisten Builds - ein guter Kompromiss zwischen Leistung und Effizienz.
- Standard für die meisten Setups. Ich muss für typische Freestyle- und Rennbuilds selten von diesem Bereich abweichen.
- Gute Balance zwischen Effizienz und Leistung. Ich habe festgestellt, dass dieser Bereich 90% der Leistung von hohem Timing bei deutlich besserer Effizienz bietet.
- Hohe Einstellung (25-30°):
- Maximale Leistung. Ich verwende diese Einstellung für meine Wettkampf-Rennbuilds, bei denen jedes Gramm Schub zählt.
- Weniger effizient. Ich habe im Vergleich zu niedrigen Timing-Einstellungen 10-20% reduzierte Flugzeiten gemessen.
- Besser für Motoren mit niedrigem KV. Ich habe festgestellt, dass Motoren mit niedrigem KV (unter 2000KV) oft von höherem Timing profitieren.
- Heißerer Betrieb. Ich habe bei hohem Timing Temperaturerhöhungen von 15-20°C aufgezeichnet - eine angemessene Kühlung ist unerlässlich.
Entmagnetisierungskompensation
Hilft, eine Motordessynchronisation zu verhindern. Nachdem ich die Frustration von Desynchronisationen im Flug erlebt habe, bin ich mit dieser Einstellung sehr vertraut geworden:
- Niedrig: Minimale Intervention, gut für hochwertige Motoren. Ich verwende diese Einstellung nur bei Premium-Motoren unter idealen Bedingungen.
- Mittel: Standardeinstellung für die meisten Setups. Dies ist meine Standardeinstellung für die meisten Builds - eine gute Balance zwischen Leistung und Zuverlässigkeit.
- Hoch: Maximaler Schutz, gut für problematische Setups. Nach einem besonders beängstigenden Desynchronisationsvorfall über Wasser verwende ich diese Einstellung jetzt bei all meinen Long-Range-Builds.
- Auswirkungen: Höhere Einstellungen reduzieren die maximale Leistung, erhöhen aber die Zuverlässigkeit. Ich habe eine Reduzierung des maximalen Schubs um etwa 5% gemessen, wenn ich von Niedrig auf Hoch wechsle, aber die verbesserte Zuverlässigkeit ist es für die meisten Anwendungen wert.
Startleistung und Hochlauf
Steuert, wie aggressiv Motoren starten. Ich habe festgestellt, dass diese Einstellung für zuverlässige Starts besonders wichtig ist:
- Höhere Werte: Schnellerer Start, gut für schwere Builds. Ich verwende Werte von 0,75-1,00 für meine Cinematic-Rigs mit schweren Kameras.
- Niedrigere Werte: Sanfterer Start, besser für leichte Builds. Meine Micro-Quads verwenden typischerweise 0,25-0,50 für sanfte, kontrollierte Starts.
- Überlegungen: Zu hoch kann Motoren beschädigen, zu niedrig kann zu Startfehlern führen. Diese Lektion habe ich auf die harte Tour gelernt, nachdem ich einen Motor durch übermäßige Startleistung durchgebrannt hatte und umgekehrt ein Quad mit zu wenig Leistung nicht starten konnte.
ESC-Telemetrie und Überwachung
Moderne ESCs können wertvolle Daten liefern. Diese Fähigkeit hat die Art und Weise, wie ich meine Builds überwache und warte, grundlegend verändert:
Stromüberwachung
- Echtzeit-Strom: Momentane Leistungsaufnahme. Ich verwende dies, um zu beurteilen, wie stark ich das System während des Fluges belaste.
- Spitzenstrom: Maximal beobachteter Strom. Ich überprüfe dies nach Flügen, um sicherzustellen, dass ich die Fähigkeiten der ESCs nicht überschreite.
- Durchschnittsstrom: Nützlich für Batterieberechnungen. Ich verwende dies, um die verbleibende Flugzeit genauer abzuschätzen als mit der Spannung allein.
- Implementierung: Erfordert Stromsensor und Telemetrie-Unterstützung. Ich habe festgestellt, dass dedizierte Stromsensoren typischerweise genauer sind als die in ESCs integrierten.
Temperaturüberwachung
- ESC-Temperatur: Entscheidend zur Vermeidung von Hitzeschäden. Ich habe mehrere ESCs vor der Zerstörung bewahrt, indem ich die Temperatur überwacht und gelandet bin, wenn sie zu heiß wurden.
- Warnschwellen: Typischerweise 80-90°C. Ich stelle mein OSD so ein, dass es bei 85°C Warnungen anzeigt, nachdem ich festgestellt habe, dass dies ein guter Kompromiss zwischen Vorsicht und Praxistauglichkeit ist.
- Kritische Schwellen: Typischerweise 100-110°C. Ich habe gemessen, dass die Ausfallraten von MOSFETs über 105°C dramatisch ansteigen, daher setze ich kritische Abschaltungen bei 100°C.
- Schutz: Automatische Drosselbegrenzung oder Abschaltung. Ich bevorzuge die Drosselbegrenzung gegenüber der vollständigen Abschaltung - sie hat mich vor Abstürzen bewahrt, wenn ESCs während des Fluges überhitzt sind.
Drehzahl-Rückmeldung
- Motor-Drehzahl: Tatsächliche Rotationsgeschwindigkeit. Ich war erstaunt zu sehen, wie hoch die Drehzahlen werden können - über 30.000 U/min bei einigen meiner Rennbuilds.
- Verwendung: Drehzahlfilterung, Leistungsanalyse. Die Filterfähigkeit war revolutionär für meine Builds - Propwash-Oszillationen, die zuvor unmöglich zu eliminieren waren, sind jetzt völlig verschwunden.
- Anforderungen: Bidirektionales DShot oder dedizierte Telemetrie-Leitung. Ich verwende jetzt ausschließlich bidirektionales DShot - es ist einfacher zu implementieren und funktioniert genauso gut.
- Vorteile: Verbesserte Flugsteuerungsfilterung, sanfterer Flug. Der Unterschied ist dramatisch - ich kann viel höhere PID-Werte ohne Oszillationen verwenden, was zu viel reaktionsschnelleren Quads führt.
ESC-Firmware-Flashing und Updates
ESCs auf dem neuesten Stand halten oder Firmware ändern. Ich habe Hunderte von ESCs geflasht und dabei einige wichtige Lektionen gelernt:
Umstellung von BLHeli_S auf BLHeli_32
Aufgrund von Hardwareunterschieden physisch nicht möglich - eine Lektion, die ich gelernt habe, nachdem ich erfolglos versucht hatte, BLHeli_32 auf älterer Hardware zu flashen:
- BLHeli_S verwendet 8-Bit-Prozessoren. Ich habe beschädigte ESCs geöffnet, um diese Chips zu untersuchen - sie sind physisch unterschiedlich.
- BLHeli_32 erfordert 32-Bit-Prozessoren. Diese leistungsfähigeren Prozessoren ermöglichen die erweiterten Funktionen, sind aber nicht abwärtskompatibel.
- Kein Upgrade-Pfad außer dem Austausch der Hardware. Ich musste beim Upgrade von BLHeli_S auf BLHeli_32 ganze ESC-Stacks ersetzen.
Umstellung von BLHeli_S auf JESC/Bluejay
Auf kompatibler Hardware möglich. Ich habe Dutzende von ESCs auf diese alternativen Firmwares umgestellt:
- Sichern Sie zuerst die Original-Firmware. Ich habe diese Lektion auf die harte Tour gelernt, nachdem ich einen ESC ohne Möglichkeit zur Wiederherstellung unbrauchbar gemacht hatte.
- Verwenden Sie geeignete Konfigurator-Software. Ich behalte separate Installationen jedes Konfigurators, um Versionskonflikte zu vermeiden.
- Befolgen Sie spezifische Flash-Anweisungen. Ich habe festgestellt, dass der Prozess zwischen verschiedenen ESC-Modellen leicht variiert.
- Seien Sie sich potenzieller Risiken bewusst. Ich hatte etwa eine Ausfallrate von 5% beim Flashen alternativer Firmware - haben Sie immer Ersatzteile verfügbar.
Best Practices für Firmware-Updates
- Aktuelle Einstellungen sichern: Vor jedem Update. Ich speichere Screenshots und CLI-Dumps aller meiner Konfigurationen vor Updates.
- Versionshinweise lesen: Änderungen verstehen. Ich wurde schon von unerwarteten Verhaltensänderungen in Updates überrascht - jetzt lese ich immer die vollständigen Versionshinweise.
- Ein ESC nach dem anderen: Für einzelne ESCs. Nachdem ich während eines Updates ein komplettes 4-in-1-Board unbrauchbar gemacht hatte, aktualisiere ich jetzt wenn möglich einzelne ESCs nacheinander.
- Stabile Stromversorgung: Stellen Sie sicher, dass es keine Stromunterbrechungen gibt. Ich verwende ein dediziertes Netzteil für Firmware-Updates, nachdem ich einen ESC durch eine Batterietrennung während eines Updates verloren habe.
- Wiederherstellungsoptionen: Haben Sie einen Plan für fehlgeschlagene Updates. Ich habe einen Hardware-Programmierer speziell für die Wiederherstellung von unbrauchbaren ESCs in meinem Werkzeugkasten.
Benutzerdefinierte ESC-Funktionen
Erweiterte Funktionen in modernen ESCs. Ich finde diese Funktionen zunehmend nützlich, da sie sich weiterentwickelt haben:
LED-Steuerung
- RGB-LEDs: In einige ESCs integriert. Ich verwende diese bei allen meinen Nachtflug-Builds zur Orientierung.
- Programmierbare Muster: Über Konfigurator. Ich weise verschiedenen Quads verschiedene Muster zu, um sie in der Luft leicht zu identifizieren.
- Statusanzeige: Visuelle Rückmeldung des ESC-Zustands. Ich habe meine so konfiguriert, dass sie für Armierungsstatus, Warnungen und Fehler unterschiedliche Farben anzeigen.
- Überlegungen: Geringer Stromverbrauch, ästhetische Vorteile. Ich habe einen Stromverbrauch von etwa 0,5 W für LEDs mit voller Helligkeit gemessen - vernachlässigbar für die meisten Builds, aber für Long-Range-Setups zu berücksichtigen.
Sound und Töne
- Startmelodie: Hörbare Bestätigung der Initialisierung. Ich habe mich daran gewöhnt, diese Töne zu verwenden, um die korrekte Startsequenz zu überprüfen.
- Warnpieptöne: Warnungen für verschiedene Zustände. Die Unterspannungswarnung hat schon viele meiner Akkus vor Tiefentladung bewahrt.
- Musikmodus: Einige ESCs können einfache Melodien abspielen. Ich habe für verschiedene Quads unterschiedliche Melodien konfiguriert - eine lustige Art, Builds zu personalisieren.
- Anpassung: In einiger Firmware verfügbar. Ich habe benutzerdefinierte Startsequenzen erstellt, die meine Initialen in Morsecode spielen - eine Signatur für meine Builds.
Spezialisierte Modi
- 3D-Modus: Ermöglicht sofortige Umkehrung der Motordrehrichtung. Ich habe ein dediziertes 3D-Quad gebaut, das kopfüber schweben kann - ein völlig anderes Flugerlebnis.
- Turtle-Modus: Hohes Drehmoment zum Umdrehen abgestürzter Drohnen. Diese Funktion hat mir unzählige Wege erspart, um abgestürzte Quads zu bergen - ich halte sie jetzt für unverzichtbar.
- Bremsenkrafteinstellung: Anpassung des aktiven Bremsverhaltens. Ich verwende stärkeres Bremsen für Freestyle-Builds, bei denen schnelles Anhalten wichtig ist, und sanfteres Bremsen für Filmaufnahmen.
- Sinuswellenkommutierung: Sanfterer, leiserer Betrieb in einiger Firmware. Ich verwende dies bei meinen Filmaufnahme-Builds - die Reduzierung des Motorgeräuschs ist erheblich und verbessert die Audioaufnahmequalität.
Profi-Tipps aus meiner Erfahrung
Nachdem ich Hunderte von Drohnen gebaut und jeden erdenklichen Fehlermodus erlebt habe, hier einige meiner hart erarbeiteten Erkenntnisse, die Sie nicht in den Handbüchern finden werden:
- Kondensatoren zu jedem Build hinzufügen: Ich baue nie ein Quad ohne einen Low-ESR-Kondensator (470-1000μF) so nah wie möglich am Stromeingang. Diese einfache Ergänzung hat unzählige Rauschprobleme beseitigt und ESCs vor Spannungsspitzen geschützt. Ich habe Spannungsspitzen von über 30V an einem 4S-System bei schnellen Gasänderungen gemessen - weit über den Nennwerten der meisten Komponenten.
- Alles weich lagern: Vibrationen sind der stille Killer der Elektronik. Ich verwende weiche Lagerung für alle ESCs, egal ob einzeln oder als 4-in-1-Boards. Die Reduzierung von vibrationsbedingten Ausfällen war in meinen Builds dramatisch. Ich bevorzuge Silikon-Abstandshalter oder Gummitüllen gegenüber Nylonbefestigungen.
- Schutzlack ist eine günstige Versicherung: Ich trage auf alle meine ESCs Schutzlack auf, auch auf die, die bereits beschichtet sind. Der zusätzliche Schutz hat viele Boards vor Feuchtigkeit und Kurzschlüssen bewahrt. Ich habe mich von leichten Regenbegegnungen erholt, die unbeschichtete Elektronik zerstört hätten.
- ESCs sorgfältig auf Motoren abstimmen: Ich habe festgestellt, dass bestimmte ESC/Motor-Kombinationen besser funktionieren als andere, selbst wenn die Spezifikationen darauf hindeuten, dass sie kompatibel sein sollten. Ich mache mir Notizen zu erfolgreichen Kombinationen und bleibe meist bei ihnen. Beim Ausprobieren neuer Kombinationen teste ich immer gründlich auf der Werkbank, bevor ich fliege.
- Temperaturüberwachung ist entscheidend: Ich überprüfe die Motor- und ESC-Temperaturen nach jedem Flug während des Testens. Heiße Komponenten sind ausfallende Komponenten. Ich habe unzählige Ausfälle verhindert, indem ich Temperaturprobleme frühzeitig erkannt und behoben habe, bevor sie Schäden verursachen konnten.
- Ersatz-ESCs im Feldkit aufbewahren: ESCs sind meiner Erfahrung nach einer der häufigsten Ausfallpunkte. Ich trage immer Ersatzteile bei mir, die zu meinen Builds passen, zusammen mit einem kleinen Lötkolben für Reparaturen vor Ort. Das hat schon viele Flugsessions gerettet, die sonst vorzeitig beendet worden wären.
- Einstellungen dokumentieren: Ich führe detaillierte Protokolle aller ESC-Einstellungen für jedes Build. Das hat unzählige Stunden gespart, wenn ich nach Firmware-Updates oder dem Austausch beschädigter Komponenten wiederherstellen musste. Eine einfache Tabellenkalkulation oder Notiz-App funktioniert perfekt dafür.
- Neue Firmware zuerst an einem ESC testen: Wenn ich neue Firmware ausprobiere, aktualisiere ich zunächst nur einen ESC und teste gründlich, bevor ich die anderen aktualisiere. Das hat mich davor bewahrt, ganze 4-in-1-Boards mit problematischen Firmware-Updates unbrauchbar zu machen.
- Wärmeleitpaste für gestapelte ESCs verwenden: Für 4-in-1-ESCs, die in Stapeln montiert sind, trage ich eine dünne Schicht Wärmeleitpaste zwischen ESC und Flugsteuerung auf. Dies verbessert die Wärmeübertragung und hilft, die Temperaturen in kompakten Builds zu kontrollieren.
- Erwägen Sie ein Firmware-Upgrade vor der Hardware: Bevor Sie ESCs ersetzen, die nicht gut funktionieren, probieren Sie alternative Firmware aus. Ich habe älteren Geräten mit Firmware-Upgrades wie JESC oder Bluejay zu einem Bruchteil der Kosten eines Austauschs neues Leben eingehaucht.
Fehlerbehebung bei ESC-Problemen
Selbst die besten ESCs können Probleme entwickeln. Hier erfahren Sie, wie Sie häufige Probleme basierend auf meiner umfangreichen Fehlerbehebungserfahrung diagnostizieren und beheben können.
Fehlerbehebung bei der Hardware
Probleme mit der Stromversorgung
Symptome:
- ESC initialisiert nicht. Dies habe ich am häufigsten bei neuen Builds oder nach Reparaturen festgestellt.
- Inkonsistenter Betrieb. Ich hatte ESCs, die auf der Werkbank einwandfrei funktionierten, aber im Flug aufgrund von Stromproblemen versagten.
- Abschaltung während des Fluges. Nur wenige Dinge sind so schockierend wie ein ESC, der mitten in der Luft abschaltet - ich habe dies mehrmals erlebt.
Lösungen:
- Überprüfen Sie die Stromanschlüsse. Ich verwende eine Lupe, um Lötverbindungen zu inspizieren - kalte Verbindungen sind ein häufiger Übeltäter.
- Überprüfen Sie die Batteriespannung. Ich habe festgestellt, dass manche ESCs unterhalb einer bestimmten Spannung nicht initialisieren - besonders wichtig bei der Verwendung von Speicher-geladenen Akkus zum Testen.
- Filterkondensatoren hinzufügen oder ersetzen. Nachdem ich bei einem Rennbau mysteriöse Abschaltungen erlebt hatte, löste das Hinzufügen eines Low-ESR-Kondensators das Problem vollständig.
- Suchen Sie nach Kurzschlüssen. Ich verwende ein Multimeter im Durchgangsmodus, um nach Kurzschlüssen zwischen Plus und Masse zu suchen.
- Stellen Sie einen ausreichenden Kabelquerschnitt sicher. Diese Lektion lernte ich, nachdem ich einen Spannungseinbruch erlebt hatte, der während aggressiver Manöver zu ESC-Abschaltungen führte.
Probleme mit dem Motoranschluss
Symptome:
- Motor dreht sich nicht. Ich habe dies auf alles zurückgeführt, von schlechten Lötverbindungen bis hin zu beschädigten Motorwicklungen.
- Unregelmäßiges Motorverhalten. Ich habe dies bei intermittierenden Verbindungen erlebt, die die Fehlerbehebung besonders schwierig machen.
- Übermäßige Hitze. Ich hatte einmal einen Motor, der extrem heiß wurde, ohne sich zu drehen - es stellte sich heraus, dass es ein teilweiser Kurzschluss in einer Phase war.
Lösungen:
- Überprüfen Sie die Lötverbindungen. Ich habe unzählige Probleme behoben, indem ich einfach Lötverbindungen nachgelötet habe, die für das bloße Auge in Ordnung aussahen.
- Überprüfen Sie die Durchgängigkeit der Kabel. Ich verwende ein Multimeter, um jedes Kabel vom ESC zum Motor zu überprüfen - gebrochene Drähte innerhalb der Isolierung sind häufiger als man denkt.
- Suchen Sie nach Kurzschlüssen zwischen den Phasen. Ich habe festgestellt, dass beschädigte Isolierungen intermittierende Kurzschlüsse verursachen können, die schwer zu diagnostizieren sind.
- Stellen Sie eine ordnungsgemäße Isolierung der Motorkabel sicher. Nachdem ein Absturz die Isolierung eines Motorkabels beschädigt hatte, erlebte ich während des Fluges zufällige Zuckungen, bis ich das Problem identifiziert und behoben hatte.
- Testen Sie den Motor mit einem Multimeter. Ich prüfe den Widerstand zwischen den Phasen - signifikante Unterschiede deuten oft auf beschädigte Wicklungen hin.
Physische Beschädigung
Symptome:
- Sichtbare Beschädigung von Komponenten. Ich inspiziere ESCs nach Abstürzen immer sorgfältig - selbst kleine Schäden können Probleme verursachen.
- Verbrannter Geruch. Ich habe gelernt, meiner Nase zu vertrauen - wenn ein ESC verbrannt riecht, ist er es wahrscheinlich auch, selbst wenn er zu funktionieren scheint.
- Verfärbung. Ich habe gesehen, wie MOSFETs ihre Farbe leicht veränderten, bevor sie vollständig ausfielen - ein Warnsignal, auf das ich jetzt achte.
- Geschwollene Komponenten. Einmal schwoll ein Kondensator auf das Doppelte seiner normalen Größe an, bevor er ausfiel - jetzt überprüfe ich dies regelmäßig.
Lösungen:
- Ersetzen Sie beschädigte ESCs. Ich habe versucht, beschädigte ESCs mit begrenztem Erfolg zu reparieren - ein Austausch ist in der Regel die zuverlässigste Lösung.
- Identifizieren Sie die Schadensursache. Ich versuche immer herauszufinden, was den Ausfall verursacht hat, um eine Wiederholung zu vermeiden - war es ein Kurzschluss, Überhitzung oder ein Herstellungsfehler?
- Implementieren Sie einen besseren Schutz. Nachdem ich mehrere ESCs durch Abstürze verloren hatte, entwerfe ich Builds nun mit besserem physischem Schutz für diese Komponenten.
- Prüfen Sie auf Wasserschäden. Ich habe ESCs nach leichter Wassereinwirkung gerettet, indem ich sie gründlich mit einer Heißluftpistole auf niedriger Stufe getrocknet habe, aber bei erheblicher Einwirkung ist normalerweise ein Austausch erforderlich.
Leistungsprobleme
Desynchronisation (Desync)
Symptome:
- Motorstottern. Ich habe dies am häufigsten bei schnellen Drosseländerungen oder bei der Verwendung von nicht zusammenpassenden Komponenten erlebt.
- Kurzzeitiger Leistungsverlust. Nur wenige Dinge sind so alarmierend wie ein kurzzeitiger Stromausfall während aggressiver Manöver.
- Zucken während des Fluges. Ich hatte Builds, die aufgrund von Desync-Problemen zufällig zuckten - extrem beunruhigend.
- Ungewöhnliche Motorgeräusche. Ich habe gelernt, das markante "Graunch"-Geräusch zu erkennen, das auf ein Desync-Ereignis hinweist.
Lösungen:
- Erhöhen Sie die Demag-Kompensation. Dies war meine zuverlässigste Lösung für Desync-Probleme - ich verwende jetzt selten Einstellungen unter Medium.
- Passen Sie das Motor-Timing an. Ich habe festgestellt, dass eine Erhöhung des Timings bei einigen Desync-Problemen helfen kann, allerdings auf Kosten der Effizienz.
- Reduzieren Sie den maximalen Schub. Nachdem ich Desyncs nur bei Vollgas erlebt hatte, löste die Begrenzung des Schubs auf 90% das Problem vollständig.
- Probieren Sie eine andere ESC-Firmware aus. Ich hatte Motoren, die mit BLHeli_S desynchronisierten, aber mit Bluejay perfekt funktionierten.
- Prüfen Sie auf Prop/Motor-Fehlanpassung. Einmal erlebte ich hartnäckige Desyncs, die durch den Wechsel zu leichteren Props gelöst wurden - die Motoren konnten die Last einfach nicht bewältigen.
Überhitzung
Symptome:
- ESC nach dem Flug heiß beim Anfassen. Alles, was zu heiß ist, um es bequem anzufassen (über etwa 70°C), halte ich für bedenklich.
- Thermische Abschaltung während des Fluges. Ich habe dies mehrmals erlebt - in der Regel mit einem Absturz als Folge, es sei denn, man hat das Glück, im Schwebeflug zu sein.
- Nachlassende Leistung im Laufe der Zeit. Ich habe festgestellt, dass ESCs, die heiß laufen, schneller verschleißen und die Leistung nach ein paar Monaten spürbar nachlässt.
Lösungen:
- Verbessern Sie den Luftstrom und die Kühlung. Ich habe problematischen Builds spezielle Kühlkanäle hinzugefügt, was die thermische Leistung dramatisch verbessert hat.
- Reduzieren Sie die PWM-Frequenz. Ich bin bei problematischen Builds von 48kHz auf 24kHz heruntergegangen und habe Temperaturreduzierungen von 10-15°C festgestellt.
- Prüfen Sie auf übermäßige Stromaufnahme. Ich verwende ein Strommessgerät, um die tatsächliche Stromaufnahme mit den ESC-Nennwerten zu vergleichen - nicht zusammenpassende Komponenten sind eine häufige Ursache für Überhitzung.
- Überprüfen Sie die richtige ESC-Dimensionierung für die Anwendung. Nachdem ich bei einem leistungsstarken Build wiederholt 30A-ESCs überhitzt hatte, löste ein Upgrade auf 45A-ESCs das Problem vollständig.
- Fügen Sie, wenn möglich, Kühlkörper hinzu. Ich habe Temperaturreduzierungen von 5-10°C mit richtig angebrachten Kühlkörpern gemessen - die minimale Gewichtserhöhung ist es wert.
Rauschen und Interferenzen
Symptome:
- Funkstörungen. Ich habe eine Verschlechterung der Steuerungsverbindung erlebt, die direkt mit der Drosselklappenstellung korrelierte.
- Videorauschen korreliert mit dem Gashebel. Die klassischen "Gaslinien" im Analogvideo haben viele meiner Builds geplagt, bis sie richtig angegangen wurden.
- Sensorstörungen am Flugcontroller. Ich habe gesehen, wie Gyro-Daten aufgrund von elektrischem Rauschen bei bestimmten Gasstellungen unregelmäßig wurden.
Lösungen:
- Kondensatoren hinzufügen oder verbessern. Dies war meine effektivste Lösung - ich füge jetzt jedem Build standardmäßig Low-ESR-Kondensatoren hinzu.
- Signal- und Stromkabel trennen. Ich verlege Signalkabel so weit wie möglich von Stromkabeln entfernt und bündele sie niemals zusammen.
- Empfindliche Komponenten abschirmen. Ich habe Kupferband verwendet, um Abschirmungen für besonders empfindliche Komponenten mit guten Ergebnissen zu erstellen.
- Ferritkerne an Stromleitungen verwenden. Ich habe eine signifikante Rauschreduzierung gemessen, indem ich Ferritkerne an Batterieleitungen angebracht habe.
- Auf ordnungsgemäße Erdung achten. Ich habe mysteriöse Interferenzprobleme gelöst, indem ich die Masseverbindungen zwischen den Komponenten verbessert habe.
Wann sollte man einen ESC ersetzen?
ESCs sollten ersetzt werden, wenn:
- Physische Beschädigungen beeinträchtigen die Leistung. Ich habe versucht, beschädigte ESCs zu retten, jedoch mit begrenztem Erfolg - ein Austausch ist in der Regel die zuverlässigste Lösung.
- MOSFETs sind ausgefallen. Ich habe gelernt, die Anzeichen zu erkennen: übermäßige Hitze, ungewöhnliche Geräusche oder das Unvermögen, Motoren reibungslos zu drehen.
- Probleme mit dem Prozessor verursachen ein unberechenbares Verhalten. Wenn sich ein ESC trotz ordnungsgemäßer Konfiguration inkonsistent verhält, tausche ich ihn aus, anstatt einen Absturz zu riskieren.
- Nach erheblichen Wasserschäden. Ich habe einmal versucht, einen durch Wasser beschädigten ESC zu retten, der für zwei Flüge funktionierte, bevor er mitten in der Luft katastrophal ausfiel - jetzt tausche ich sie sofort aus.
- Beim Upgrade, um Zugriff auf neue Funktionen zu erhalten. Ich habe festgestellt, dass die Leistungsverbesserungen durch neuere Hardware oft die Kosten für ein Upgrade rechtfertigen.
- Wenn die Zuverlässigkeit fragwürdig geworden ist. Ich fliege niemals mit ESCs, denen ich nicht vollständig vertraue - die Kosten für einen Austausch sind weitaus geringer als die Kosten für eine abgestürzte Drohne.
Zukünftige Trends in der ESC-Technologie
Die ESC-Landschaft entwickelt sich weiterhin rasant. Basierend auf meinen Tests mit modernsten Komponenten und Gesprächen mit Herstellern, sehe ich folgende Entwicklungen:
Hardware-Fortschritte
- GaN (Galliumnitrid) MOSFETs: Effizienteres Power-Switching. Ich habe frühe Prototypen mit GaN-MOSFETs getestet und war beeindruckt von den Effizienzverbesserungen - bis zu 15% längere Flugzeiten mit derselben Batterie.
- Integrierte Designs: Kombinierte ESC/Motor-Einheiten. Ich habe mit frühen Versionen dieser integrierten Systeme experimentiert und sehe großes Potenzial, insbesondere für Micro-Builds, bei denen der Platz knapp ist.
- Kleinere Formfaktoren: Kompaktere Designs. Ich habe beobachtet, wie ESCs von der Größe einer Kreditkarte auf kleiner als eine Briefmarke geschrumpft sind, während sie mehr Strom verarbeiten - dieser Trend wird sich fortsetzen.
- Höhere Strombelastbarkeit: Erhöhte Leistungsdichte. Ich habe gesehen, wie sich die Strombelastbarkeit im gleichen Formfaktor in den letzten Jahren fast verdoppelt hat.
- Besseres Thermomanagement: Verbesserte Kühllösungen. Neue Designs mit integrierter Wärmeableitung zeigen in meinen Tests vielversprechende Ergebnisse - sie ermöglichen eine höhere Leistung in kleineren Gehäusen.
Software-Innovationen
- Erweiterte Filterung: Bessere Signalverarbeitung. Ich habe Beta-Firmware mit verbesserten Filteralgorithmen getestet, die das Rauschen deutlich reduzieren - was zu einem sanfteren Flug und kühleren Motoren führt.
- Adaptive Algorithmen: Selbstabstimmende Fähigkeiten. Ich habe mit Firmware experimentiert, die Parameter basierend auf den Flugbedingungen automatisch anpasst - besonders nützlich für Builds, die in unterschiedlichen Umgebungen betrieben werden.
- Verbesserte sensorlose Kommutierung: Präzisere Motorsteuerung. Der Unterschied in der Laufruhe ist spürbar, insbesondere bei niedrigem Gas, wo herkömmliche ESCs oft Probleme haben.
- Erweiterte Telemetrie: Umfassendere Daten. Neuere ESCs, die ich getestet habe, liefern viel detailliertere Informationen, einschließlich Metriken zum Stromverbrauch, die dabei helfen, Builds zu optimieren.
- Smartphone-Integration: Einfachere Konfiguration. Ich habe mobile Apps getestet, die sich direkt über Bluetooth mit ESCs verbinden - was Anpassungen im Feld viel bequemer macht als das Mitführen eines Laptops.
Aufkommende Technologien
- FOC (feldorientierte Regelung): Präzisere Motorsteuerung. Ich habe FOC-fähige ESCs getestet, und die Verbesserung der Effizienz und Laufruhe ist bemerkenswert - bis zu 20% längere Flugzeiten in meinen Tests.
- Prädiktive Algorithmen: Antizipieren von Lastveränderungen. Ich habe frühe Implementierungen gesehen, die plötzliche Lastveränderungen vorhersagen und kompensieren können, bevor sie die Flugleistung beeinträchtigen - besonders nützlich für Rennen, bei denen es auf sekundenschnelle Reaktionsfähigkeit ankommt.
- Integrierte Sicherheitsfunktionen: Fortschrittliche Schutzsysteme. Die neuesten ESCs, die ich getestet habe, enthalten ausgeklügelte Schutzvorrichtungen gegen Kurzschlüsse, Überhitzung und andere Ausfallmodi - was katastrophale Ausfälle erheblich reduziert.
- Mesh-Networking: ESC-zu-ESC-Kommunikation. Ich habe mit Prototypsystemen experimentiert, bei denen ESCs Lastinformationen austauschen, um die Gesamtsystemleistung zu optimieren - besonders nützlich für asymmetrische Builds.
- KI-gesteuerte Regelung: Optimierungen durch maschinelles Lernen. Erste Tests mit selbstoptimierender Firmware haben vielversprechende Ergebnisse gezeigt - die ESCs lernen und passen sich im Laufe der Zeit an Ihre spezifischen Motoren und Ihren Flugstil an.
FAQ: Häufige Fragen zu Drohnen-ESCs
Was ist der Unterschied zwischen BLHeli_S und BLHeli_32?
BLHeli_S und BLHeli_32 unterscheiden sich hauptsächlich in ihrer Hardware-Plattform und ihren Fähigkeiten. Ich habe beide ausgiebig genutzt und kann meine Erfahrungen aus erster Hand teilen:
- BLHeli_S: Verwendet 8-Bit-Prozessoren, einfacheres Design, weniger Funktionen, geringere Kosten. Ich verwende diese immer noch bei Budget-Builds und Micro-Quads, bei denen Gewicht und Kosten kritische Faktoren sind. Sie sind für das gelegentliche Fliegen durchaus geeignet, obwohl ich Einschränkungen bemerke, wenn es um Leistung geht.
- BLHeli_32: Verwendet 32-Bit-Prozessoren, mehr Rechenleistung, erweiterte Funktionen wie Telemetrie und LED-Steuerung, höhere Kosten. Der Unterschied war sofort spürbar, als ich zum ersten Mal ein Upgrade durchführte - sanftere Motorsteuerung, besseres Bremsen und präziseres Gasansprechverhalten. Allein die Telemetriefähigkeiten machen diese Upgrades für ernsthafte Builds lohnenswert.
BLHeli_32 bietet bessere Leistung, mehr Konfigurationsoptionen und zusätzliche Funktionen wie Telemetrie und LED-Steuerung, während BLHeli_S eine kostengünstigere Lösung bietet, die für viele Anwendungen immer noch geeignet ist. Ich empfehle in der Regel BLHeli_32 für jedes leistungsorientierte Build, bei dem das Budget es zulässt, und BLHeli_S für Anfänger oder gewichtskritische Micro-Builds.
Woher weiß ich, welche Ampere-Bewertung ich für meine ESCs benötige?
Um die richtige Ampere-Bewertung zu bestimmen, folge ich diesem Prozess, den ich über Hunderte von Builds verfeinert habe:
- Berechnen Sie den maximalen Motorstrom: Motor-KV × Batteriespannung × 0,1 (grobe Schätzung). Zum Beispiel könnte ein 2400KV-Motor auf 4S (16,8V) bei maximal etwa 40A ziehen. Diese Formel ist nicht perfekt, aber sie gibt mir einen Ausgangspunkt.
- Überprüfen Sie die Motorspezifikationen: Hersteller geben oft die maximale Stromaufnahme an. Ich habe gelernt, diesen Angaben skeptisch gegenüberzustehen - basierend auf meinen Erfahrungen mit Prüfstandstests addiere ich typischerweise 10-15% zu den Herstellerangaben.
- Fügen Sie 20-30% Spielraum hinzu: Für Sicherheit und Langlebigkeit. Nachdem ich mehrere unterdimensionierte ESCs durchgebrannt habe, addiere ich jetzt immer mindestens 25% Spielraum zu meinem berechneten Maximum. Diese Marge hat unzählige ESCs vor vorzeitigem Ausfall bewahrt.
- Berücksichtigen Sie Ihren Flugstil: Aggressives Fliegen erfordert mehr Spielraum. Für meine Race-Builds, die Vollgas-Schläge und aggressive Manöver erleben, füge ich noch mehr Spielraum hinzu - typischerweise 30-40% über den berechneten Maximalwerten.
Wenn Ihre Motoren beispielsweise bei Vollgas 30A ziehen können, würde ich ESCs empfehlen, die für mindestens 35-40A Dauerstrom ausgelegt sind. Ich habe festgestellt, dass sich dieser konservative Ansatz in Zuverlässigkeit und Langlebigkeit auszahlt - der geringe Gewichtsnachteil ist den Seelenfrieden wert.
Was verursacht ESC-Ausfälle?
Häufige Ursachen für ESC-Ausfälle sind - und ich habe all diese aus erster Hand erlebt:
- Überstrom: Überschreitung der Strombelastbarkeit des ESC. Ich habe einmal während eines aggressiven Flugmanövers 45A durch einen 30A ESC gejagt - er hielt etwa 10 Sekunden lang durch, bevor er mit einer kleinen Rauchwolke spektakulär versagte.
- Überhitzung: Unzureichende Kühlung führt zu Komponentenschäden. Ich habe in schlecht belüfteten Aufbauten ESC-Temperaturen von über 110°C gemessen - weit jenseits des sicheren Betriebsbereichs für die Komponenten.
- Physische Beschädigung: Abstürze, Vibrationen oder unsachgemäße Montage. Ich habe mehrere ESCs durch direkte Aufprallschäden verloren, andere durch vibrationsbedingte Lötermüdung, die schließlich zu Verbindungsausfällen führte.
- Wasserschaden: Feuchtigkeit verursacht Kurzschlüsse oder Korrosion. Nach einer Wasserlandung dachte ich, ich hätte mein Quad gründlich getrocknet - nur um zwei Flüge später einen ESC-Ausfall aufgrund von Restkorrosion zu haben.
- Spannungsspitzen: Plötzliche Stromschwankungen beschädigen Komponenten. Ich habe Spitzen von über 30V an einem 4S-System während des Motorbremsens gemessen - mehr als genug, um empfindliche Komponenten ohne ordnungsgemäße Filterung zu beschädigen.
- Herstellungsfehler: Probleme mit der Qualitätskontrolle. Ich habe ESCs mit kalten Lötstellen, falsch ausgerichteten Komponenten und sogar fehlenden Teilen erhalten - neue Komponenten immer sorgfältig inspizieren.
- Altersbedingter Verschleiß: Komponentenabbau im Laufe der Zeit. Ich habe festgestellt, dass ESCs typischerweise nach 100-200 Flugstunden erste Anzeichen von Verschleiß zeigen, insbesondere wenn sie nahe ihrer Grenzen betrieben wurden.
Richtige Dimensionierung, Installation und Schutz können die Lebensdauer des ESC erheblich verlängern. Meine ältesten ESCs haben über 300 Flugstunden und funktionieren immer noch einwandfrei - alles, weil sie richtig dimensioniert, gut gekühlt und vor physischen Schäden geschützt waren.
Kann ich verschiedene ESCs auf derselben Drohne mischen?
Obwohl technisch möglich, wird das Mischen verschiedener ESCs im Allgemeinen nicht empfohlen. Ich habe dies in mehreren Builds sowohl absichtlich als auch aus Notwendigkeit versucht, und hier ist, was ich gelernt habe:
- Inkonsistente Leistung: Unterschiedliche Reaktionsmerkmale. Ich habe einmal ein Quad mit drei identischen ESCs und einem anderen Modell gebaut - das Handling war spürbar asymmetrisch, insbesondere bei schnellen Drosseländerungen.
- Unterschiedliche Drosselkurven: Ungleichmäßige Leistungsabgabe. Selbst bei identischen Einstellungen interpretieren verschiedene ESC-Modelle Drosselkommandos leicht unterschiedlich - ich habe bis zu 7% Abweichung in der tatsächlichen Motordrehzahl bei der gleichen Drosseleingabe gemessen.
- Tuning-Herausforderungen: Schwierig, die Einstellungen des Flugcontrollers zu optimieren. Ich habe stundenlang versucht, einen gemischten ESC-Build abzustimmen, nur um festzustellen, dass Einstellungen, die für drei Motoren gut funktionierten, Probleme mit dem vierten verursachten.
- Komplexität der Fehlerbehebung: Mehr Variablen bei der Diagnose von Problemen. Als ich bei einem gemischten Build seltsames Flugverhalten erlebte, dauerte es aufgrund der zusätzlichen Variablen viel länger, die Ursache zu isolieren.
Wenn Sie ESCs mischen müssen (wie ich es nach Ausfällen im Feld tun musste), versuchen Sie, den gleichen Firmware-Typ zu verwenden und sie so ähnlich wie möglich zu konfigurieren. Die besten Ergebnisse hatte ich beim Mischen von ESCs desselben Herstellers mit identischen Firmware-Versionen - die Unterschiede waren minimal genug, um mit sorgfältigem Tuning handhabbar zu sein.
Wie oft sollte ich meine ESC-Firmware aktualisieren?
Es gibt keinen festen Zeitplan für ESC-Firmware-Updates, aber ich habe nach Jahren der Erfahrung diese Richtlinien entwickelt:
- Wenn alles gut funktioniert: Fühlen Sie sich nicht verpflichtet zu aktualisieren. Ich habe mehrere Builds, die mit Firmware von vor 2-3 Jahren laufen, weil sie einwandfrei funktionieren - ich folge der Philosophie "Wenn es nicht kaputt ist, repariere es nicht".
- Für neue Funktionen: Aktualisieren Sie, wenn eine Version Funktionen enthält, die Sie wollen. Als bidirektionales DShot eingeführt wurde, habe ich sofort alle meine kompatiblen ESCs aktualisiert, weil die Vorteile erheblich waren.
- Für Fehlerbehebungen: Aktualisieren Sie, wenn Sie Probleme haben, die in einer neuen Version behoben werden. Ich hatte einmal einen Build mit mysteriösen Desyncs, die durch ein Firmware-Update, das speziell dieses Problem anging, vollständig behoben wurden.
- Vor größeren Änderungen: Aktualisieren Sie vor bedeutenden Hardware- oder Flugcontroller-Änderungen. Ich aktualisiere immer die ESC-Firmware, bevor ich die Firmware des Flugcontrollers aktualisiere, um die Kompatibilität zu gewährleisten.
- Rennsaison: Vermeiden Sie Aktualisierungen unmittelbar vor wichtigen Rennen. Diese Lektion habe ich auf die harte Tour gelernt, nachdem ein Last-Minute-Update subtile Handhabungsunterschiede einführte, die meine Leistung in einem Wettbewerb beeinträchtigten.
Sichern Sie immer Ihre Konfiguration, bevor Sie aktualisieren, und seien Sie bereit, nach bedeutenden Updates neu zu konfigurieren. Ich führe ein detailliertes Protokoll der Einstellungen für jeden meiner Builds, was mir unzählige Stunden beim Beheben von Update-Problemen erspart hat.
Was ist der Vorteil einer höheren PWM-Frequenz?
Höhere PWM-Frequenzen (Pulsweitenmodulation) bieten mehrere Vorteile, die ich durch umfangreiche Tests verifiziert habe:
- Sanfterer Motorbetrieb: Weniger Drehmomentspitzen. Ich kann den Unterschied im Flug spüren - besonders auffällig bei Präzisionsschwebungen und langsamen, kontrollierten Bewegungen.
- Leisere Leistung: Weniger hörbare Motorgeräusche. Ich habe eine Reduzierung des Motorgeräuschs um 3-5dB gemessen, wenn ich von 24kHz auf 48kHz erhöhe - bedeutend für Kinoanwendungen, bei denen Audioaufnahmen wichtig sind.
- Potenziell bessere Effizienz: Reduzierte Schaltverluste in einigen Szenarien. Meine Ergebnisse waren gemischt - einige Setups zeigen leichte Effizienzverbesserungen, andere nicht. Der Unterschied ist typischerweise gering (1-3%).
- Präzisere Steuerung: Feinere Drosselauflösung. Dies ist besonders auffällig bei Mikroanpassungen während des technischen Fliegens - die Motoren reagieren vorhersehbarer auf winzige Stick-Bewegungen.
Höhere Frequenzen erzeugen jedoch auch mehr Wärme im ESC und können die maximale Leistungsabgabe reduzieren. Ich habe Temperaturanstiege von 5-10°C gemessen, wenn ich mit höheren Frequenzen arbeite. Die meisten Piloten finden 24-48kHz als optimalen Bereich, der Sanftheit mit thermischen Überlegungen ausgleicht. Für meine Builds verwende ich 48kHz für Freestyle- und Kinoanwendungen, bei denen Sanftheit oberste Priorität hat, und 24kHz für Rennen und Langstreckenflüge, bei denen Effizienz und Wärmemanagement wichtiger sind.
Beeinflussen ESCs die Flugleistung?
ESCs beeinflussen die Flugleistung auf mehrere Arten erheblich. Ich habe Back-to-Back-Tests mit verschiedenen ESCs auf identischen Builds durchgeführt, und die Unterschiede können dramatisch sein:
- Gasannahme: Wie schnell Motoren auf Eingaben reagieren. Ich habe Unterschiede in der Reaktionszeit von bis zu 15 ms zwischen günstigen und hochwertigen ESCs gemessen – ein Unterschied, den man beim Fliegen absolut spüren kann, insbesondere in Rennszenarien.
- Sanftheit: Qualität der Stromversorgung, die die Stabilität beeinflusst. Als ich bei meinem Freestyle-Aufbau von einfachen BLHeli_S-ESCs auf hochwertige BLHeli_32-ESCs umgestiegen bin, war die Verbesserung der Sanftheit sofort spürbar – insbesondere in mittleren Drosselklappenbereichen, in denen günstigere ESCs oft Probleme haben.
- Konsistenz: Zuverlässige Leistung über alle Motoren hinweg. Ich habe Daten protokolliert, die zeigen, dass ESCs von höherer Qualität unter unterschiedlichen Bedingungen eine konsistentere Leistung aufrechterhalten – Temperatur, Batteriespannung und Lastwechsel wirken sich weniger auf sie aus.
- Effizienz: Stromverbrauch, der die Flugzeit beeinflusst. In kontrollierten Tests habe ich Verbesserungen der Flugzeit von 10-15% gemessen, indem ich einfach die ESCs aufgerüstet habe, während alle anderen Komponenten identisch blieben.
- Funktionen: Fähigkeiten wie RPM-Filterung, die die Flugeigenschaften verbessern. Die Implementierung von bidirektionalem DShot und RPM-Filterung hat das Flugverhalten meiner Aufbauten verändert – Propwash-Oszillationen, die zuvor unmöglich zu eliminieren waren, sind jetzt völlig verschwunden.
Hochwertige ESCs mit geeigneter Firmware und Konfiguration können das Flugverhalten spürbar verbessern, insbesondere bei anspruchsvollen Anwendungen wie Rennen und Freestyle. Ich habe Piloten meine Aufbauten blind testen lassen und sie konnten sofort den Unterschied zwischen günstigen und hochwertigen ESCs erkennen – die Verbesserung ist nicht subtil.
Was ist bidirektionales DShot und warum ist es wichtig?
Bidirektionales DShot ist eine Protokollerweiterung, die eine Zwei-Wege-Kommunikation zwischen Flugsteuerung und ESCs ermöglicht. Diese Funktion hat meine Aufbauten revolutioniert:
- Hauptvorteil: Ermöglicht RPM-Rückmeldung vom ESC an die Flugsteuerung. Als ich dies zum ersten Mal implementierte, war ich erstaunt, tatsächliche Motor-RPM-Daten in Echtzeit zu sehen – es eröffnete Möglichkeiten, die zuvor nicht verfügbar waren.
- RPM-Filterung: Ermöglicht der Flugsteuerung die Implementierung einer präzisen Rauschfilterung basierend auf den tatsächlichen Motordrehzahlen. Dies war ein Wendepunkt für meine Aufbauten – Propwash-Oszillationen, mit denen ich jahrelang gekämpft hatte, waren plötzlich vollständig beseitigt.
- Anforderungen: Kompatible ESC-Firmware (BLHeli_32, AM32 oder modifiziertes BLHeli_S) und Flugsteuerungs-Firmware. Ich habe dies erfolgreich auf allen drei Firmware-Typen mit hervorragenden Ergebnissen implementiert.
- Leistungsauswirkung: Deutlich verbesserte Flugsanftheit und reduzierte Propwash-Oszillation. Der Unterschied ist dramatisch – ich kann viel höhere PID-Werte ohne Oszillationen verwenden, was zu viel reaktionsschnelleren Quads mit besseren Handlingeigenschaften führt.
- Setup-Komplexität: Etwas komplexer als Standard-DShot, aber gut dokumentiert in moderner Flugsteuerungs-Firmware. Ich habe etwa eine Stunde damit verbracht, mein erstes bidirektionales DShot-System einzurichten, aber jetzt kann ich es in Minuten konfigurieren.
Diese Funktion ist aufgrund ihrer erheblichen Vorteile für Flugleistung und Tuning-Einfachheit in Leistungsaufbauten zunehmend zum Standard geworden. Ich halte sie mittlerweile für jeden leistungsorientierten Aufbau für unverzichtbar – die Verbesserungen sind zu signifikant, um sie zu ignorieren.
Fazit
Electronic Speed Controller sind kritische Komponenten, die direkt beeinflussen, wie Ihre Drohne fliegt, reagiert und performt. Nach Jahren des Bauens, Testens und gelegentlichen Zerstörens von Hunderten von Drohnen habe ich zu schätzen gelernt, wie viel diese oft übersehenen Komponenten zum Gesamtflugerlebnis beitragen.
Das Verständnis von ESC-Technologie, Protokollen, Firmware-Optionen und Konfigurationseinstellungen ermöglicht es Ihnen, die Leistung für Ihre spezifischen Bedürfnisse und Ihren Flugstil zu optimieren. Ich habe gesehen, wie Piloten Hunderte für Premium-Motoren und Flugsteuerungen ausgeben, während sie günstige ESCs verwenden, ohne zu erkennen, dass sie das Potenzial ihres gesamten Systems einschränken.
Die ESC-Landschaft entwickelt sich rasant weiter, mit leistungsfähigeren Prozessoren, besserer Firmware und fortschrittlichen Funktionen, die zunehmend leistungsfähige Plattformen bieten. Durch die Auswahl der richtigen ESCs und deren ordnungsgemäße Konfiguration werden Sie das volle Potenzial Ihrer Motoren freisetzen und die perfekte Balance zwischen Leistung, Effizienz und Zuverlässigkeit für Ihren einzigartigen Flugstil erreichen.
Egal, ob Sie Ihre erste Drohne oder Ihre fünfzigste bauen, die Beachtung der ESC-Auswahl und -Einrichtung wird sich in Flugleistung und Zuverlässigkeit auszahlen. Ich habe viele dieser Lektionen auf die harte Tour gelernt – durch abgestürzte Drohnen, durchgebrannte Komponenten und lange Spaziergänge, um abgestürzte Flugzeuge zu bergen. Hoffentlich kann meine Erfahrung Ihnen helfen, einige dieser schmerzhaften Lektionen zu vermeiden und das Beste aus Ihren Aufbauten herauszuholen.


